goal driven planning and adaptivity car06 06/04/2006 diapositive n°6 / 46 ministÈre de la dÉfense...
TRANSCRIPT

Goal driven planning and adaptivity for AUVs
CAR06

DGA/DET/GESMA 06/04/2006 Diapositive N°2 / 46MINISTÈRE DE LA DÉFENSE
GESMA : LocationGESMA : Location

DGA/DET/GESMA 06/04/2006 Diapositive N°3 / 46MINISTÈRE DE LA DÉFENSE
Underwater Warfare Environment
Platform susceptibility
Robotics
Mine warfare
GESMA : Skills & MissionsGESMA : Skills & Missions

DGA/DET/GESMA 06/04/2006 Diapositive N°4 / 46MINISTÈRE DE LA DÉFENSE
GESMAGESMA

DGA/DET/GESMA 06/04/2006 Diapositive N°5 / 46MINISTÈRE DE LA DÉFENSE
DCSD Lab: Systems Control and Flight Dynamics Department
execution control
situationassessmentplanning
guidance stateestimation
operatoroperator
Flight mechanics& Identification
Control
Decision
Human Factors
vehiclevehicle
ONERA : ONERA : French Aeronautics and Space Research CenterFrench Aeronautics and Space Research Center

DGA/DET/GESMA 06/04/2006 Diapositive N°6 / 46MINISTÈRE DE LA DÉFENSE
PROLEXIAPROLEXIA
� Small company
� Simulation� Mission planning tools

DGA/DET/GESMA 06/04/2006 Diapositive N°7 / 46MINISTÈRE DE LA DÉFENSE
Gesma studies on planning toolsGesma studies on planning tools
� Assess requirements for mission planning tools for different levels of autonomy
� Assess adaptivity for Mine Warfare and REA missions

DGA/DET/GESMA 06/04/2006 Diapositive N°8 / 46MINISTÈRE DE LA DÉFENSE
Levels of autonomyLevels of autonomy
Level 1: Ordered set of elementary controls
Level 2 : Geographic trajectory planning (Wpts)
Level 3 : Goal driven planning & Operator supervision
Level 4 : Fully autonomous mission
Level 0 : teleoperation

DGA/DET/GESMA 06/04/2006 Diapositive N°9 / 46MINISTÈRE DE LA DÉFENSE
MilitaryMilitary requirementsrequirements
•Low bandwidth communication•Discrete or Unsupervised AUV mission
•Unknown or hostile environment
Adaptivity
Autonomy
goal driven planning

DGA/DET/GESMA 06/04/2006 Diapositive N°10 / 46MINISTÈRE DE LA DÉFENSE
ExamplesExamples ofof goalsgoals
� Find a wreck (or plane black boxes)
� Survey a zone for mines detection, classification and identification
� Find a free path suitable for amphibious assault

DGA/DET/GESMA 06/04/2006 Diapositive N°11 / 46MINISTÈRE DE LA DÉFENSE
ExamplesExamples ofof adaptivityadaptivity
� If the current is strong and not in the main survey direction, change the survey direction
� If something is detected, try to classify by multi-aspect sonar acquisition
� If something is classify, try to identify by going over at low altitude
� If enter a posidony field, change mapping strategy
� If sand ripples prevent from good detection, plan another survey perpendicular to main sand ripples direction

DGA/DET/GESMA 06/04/2006 Diapositive N°12 / 46MINISTÈRE DE LA DÉFENSE
Mission planningMission planning
� Data quality insurance� Exhaustivity (coverage, overlap, redundancy)� Accuracy (altitude related to sensor definition, environment)� Confidence (computer aided decision, performance criteria,
navigation errors)
� AUV security insurance� Bathymetry� Forbidden area� Security immersion in traffic zone� Strong currents
� Mission optimization� Mainly for energy consumption� Time/tide/currents
DGA/DET/GESMA 06/04/2006 Diapositive N°13 / 46MINISTÈRE DE LA DÉFENSE
What you need is:What you need is:
� A nice AUV� Redermor platform
� User friendly Operator MMI� Preparation / Supervision
� Environmental database� SHOM METOC guide / C-Map
� Automatic planning algorithm� Dijkstra and Little algorithms (shortest path, lowest cost)
� Onboard supervision system� Petri nets
� Events generation by sensors measurements and computer aided treatments on sonars

DGA/DET/GESMA 06/04/2006 Diapositive N°14 / 46MINISTÈRE DE LA DÉFENSE
The nice AUV : The nice AUV : RedermorRedermor
Sensors
Planning optimization PLN
Petri player
ProCoSa
Data
manager
GDD
Petri nets
Vehicle
behavior
Guidance GUI
EVT
Interface of commands
IDC
Data server of GESMA
OA_NAVIO
Payload
drivers and
treatments
CAN BusDrivers Drivers Actuators
Can big boxes
OA1
OA2 mission
OA2 and OA3
consigns
events
commands
status
events
Sensors
Planning optimization PLN
Petri player
ProCoSa
Data
manager
GDD
Petri nets
Vehicle
behavior
Guidance GUI
EVT
Interface of commands
IDC
Data server of GESMA
OA_NAVIO
Payload
drivers and
treatments
CAN BusDrivers Drivers Actuators
Can big boxes
OA1
OA2 mission
OA2 and OA3
consigns
events
commands
status
events

DGA/DET/GESMA 06/04/2006 Diapositive N°15 / 46MINISTÈRE DE LA DÉFENSE
Mission planning MMIMission planning MMI
� level 1 : text editor Or NIVAS/IOVAS
� level 2 : FLEET MANAGER
� level 3 and 4 : NIVAS/IOVAS

DGA/DET/GESMA 06/04/2006 Diapositive N°16 / 46MINISTÈRE DE LA DÉFENSE
Environmental databaseEnvironmental database

DGA/DET/GESMA 06/04/2006 Diapositive N°17 / 46MINISTÈRE DE LA DÉFENSE
Planning algorithmsPlanning algorithms
mission graph
waypoint
mission graph
waypoint
obstacles
-100
-80
-60
-40
-20
00 10000 20000 30000 40000 50000 60000
survey 1
survey 2
survey 3
obstacle avoidance

DGA/DET/GESMA 06/04/2006 Diapositive N°18 / 46MINISTÈRE DE LA DÉFENSE
Supervision by Petri netsSupervision by Petri nets

DGA/DET/GESMA 06/04/2006 Diapositive N°19 / 46MINISTÈRE DE LA DÉFENSE
Events generation, data treatmentEvents generation, data treatment
� Apply to mine warfareévénements + informations
actions = requête de calcul
vers rdp ou serveur
événements + résultats
Re planning
CAD/CAC

DGA/DET/GESMA 06/04/2006 Diapositive N°20 / 46MINISTÈRE DE LA DÉFENSE
Level 1 : IOVAS MMI (Level 1 : IOVAS MMI (ProlexiaProlexia))

DGA/DET/GESMA 06/04/2006 Diapositive N°21 / 46MINISTÈRE DE LA DÉFENSE
Level 1 : sequence of controlsLevel 1 : sequence of controls

DGA/DET/GESMA 06/04/2006 Diapositive N°22 / 46MINISTÈRE DE LA DÉFENSE
Level 1 : mission scriptLevel 1 : mission script

DGA/DET/GESMA 06/04/2006 Diapositive N°23 / 46MINISTÈRE DE LA DÉFENSE
Paramètres
Type de commande duré
e
vite
sse_
avan
ce
imm
ersi
on_f
inal
e
vite
sse_
chgt
_im
mer
sion
altit
udef
ond_
final
e
vite
sse_
chgt
_alti
tude
fond
delta
_im
mer
sion
delta
_alti
tude
fond
vite
sse_
gira
tion
cap_
final
delta
_cap
SuiviCapVitImm x
SuiviCapVitAltifond x
SuiviCapImm x x
SuiviCapAltifond x x
SuiviCapVitImmersionFinale x x
SuiviCapVitAltitudefondFinale x x
SuiviCapVitDeltaImmersion x x
SuiviCapVitDeltaAltitudefond x x
GirationImm x x
GirationAltifond x x
GirationImmCapFinal x x
GirationAltifondCapFinal x x
GirationImmDeltaCap x x
GirationAltifondDeltaCap x x
GirationImmersionFinale x x x
GirationAltitudefondFinale x x x
GirationDeltaImmersion x x x
GirationDeltaAltitudefond x x x
Level 1 : controlsLevel 1 : controls

DGA/DET/GESMA 06/04/2006 Diapositive N°24 / 46MINISTÈRE DE LA DÉFENSE
Level 1: supervisionLevel 1: supervision

DGA/DET/GESMA 06/04/2006 Diapositive N°25 / 46MINISTÈRE DE LA DÉFENSE
Level 2 MMI : Fleet manager (ACSA)Level 2 MMI : Fleet manager (ACSA)

DGA/DET/GESMA 06/04/2006 Diapositive N°26 / 46MINISTÈRE DE LA DÉFENSE
Level 2: what an AUV can do?Level 2: what an AUV can do?

DGA/DET/GESMA 06/04/2006 Diapositive N°27 / 46MINISTÈRE DE LA DÉFENSE
Level 2 : waypoints definitionLevel 2 : waypoints definition
DGA/DET/GESMA 06/04/2006 Diapositive N°28 / 46MINISTÈRE DE LA DÉFENSE
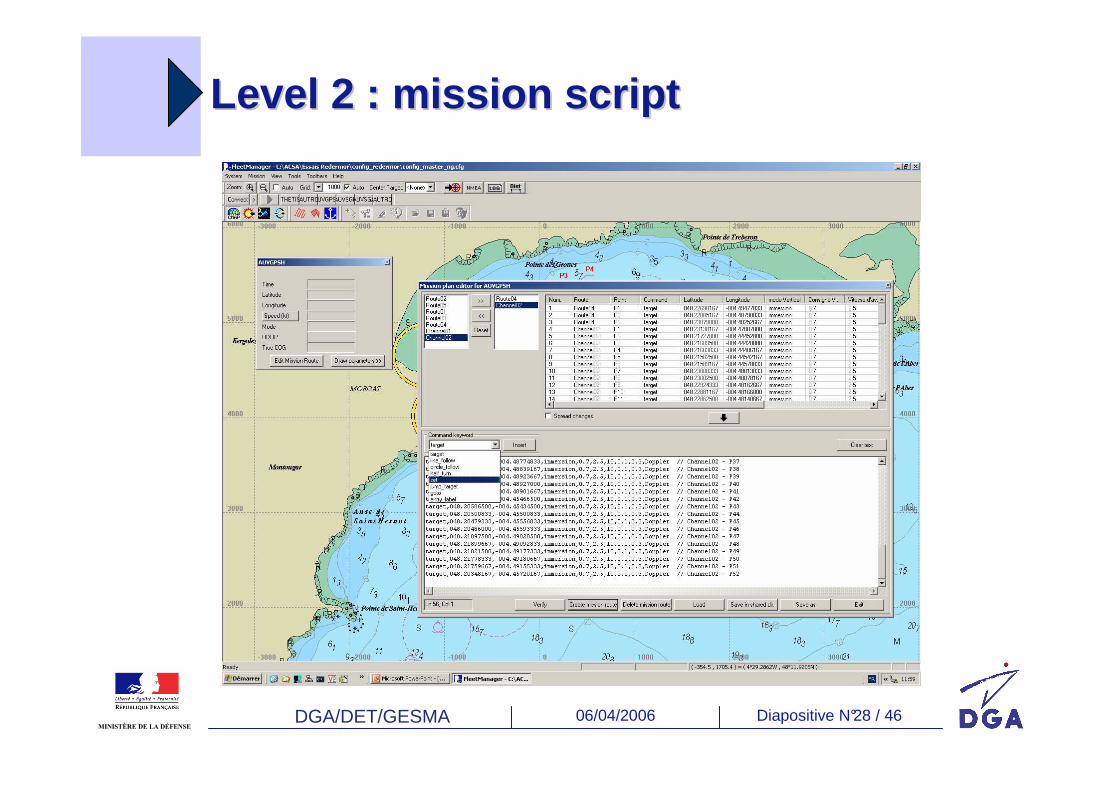
Level 2 : mission scriptLevel 2 : mission script
DGA/DET/GESMA 06/04/2006 Diapositive N°29 / 46MINISTÈRE DE LA DÉFENSE
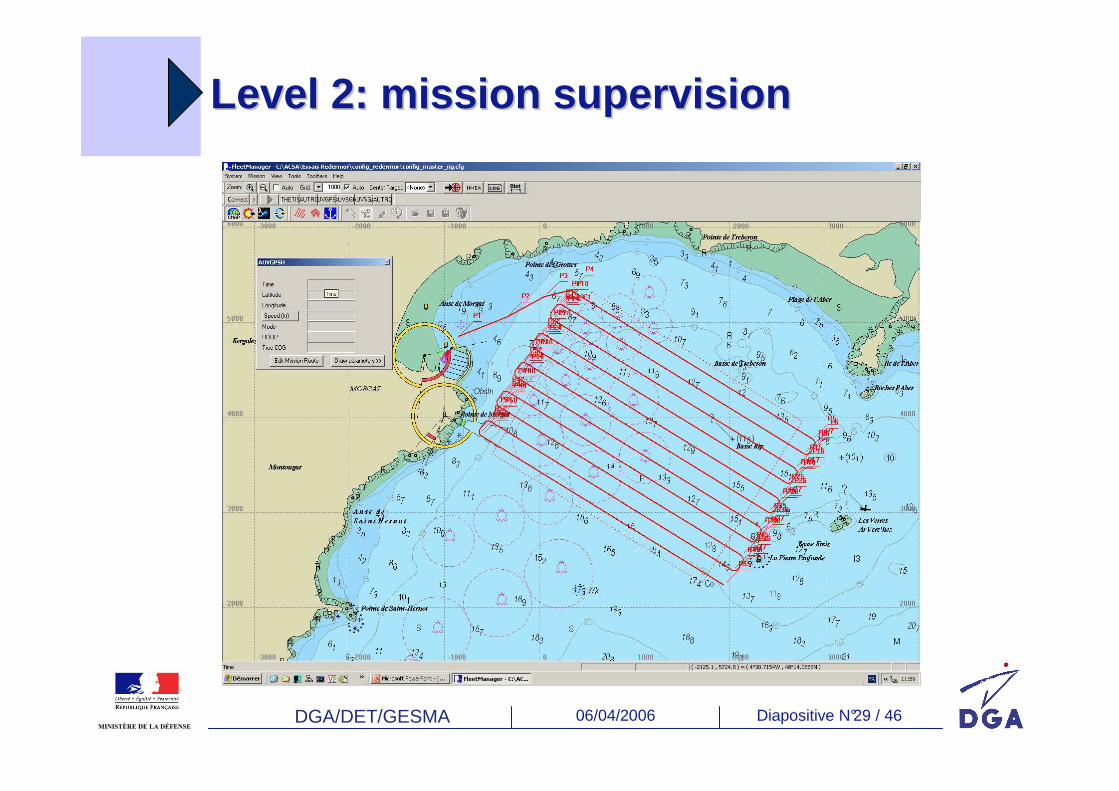
Level 2: mission supervisionLevel 2: mission supervision
DGA/DET/GESMA 06/04/2006 Diapositive N°30 / 46MINISTÈRE DE LA DÉFENSE
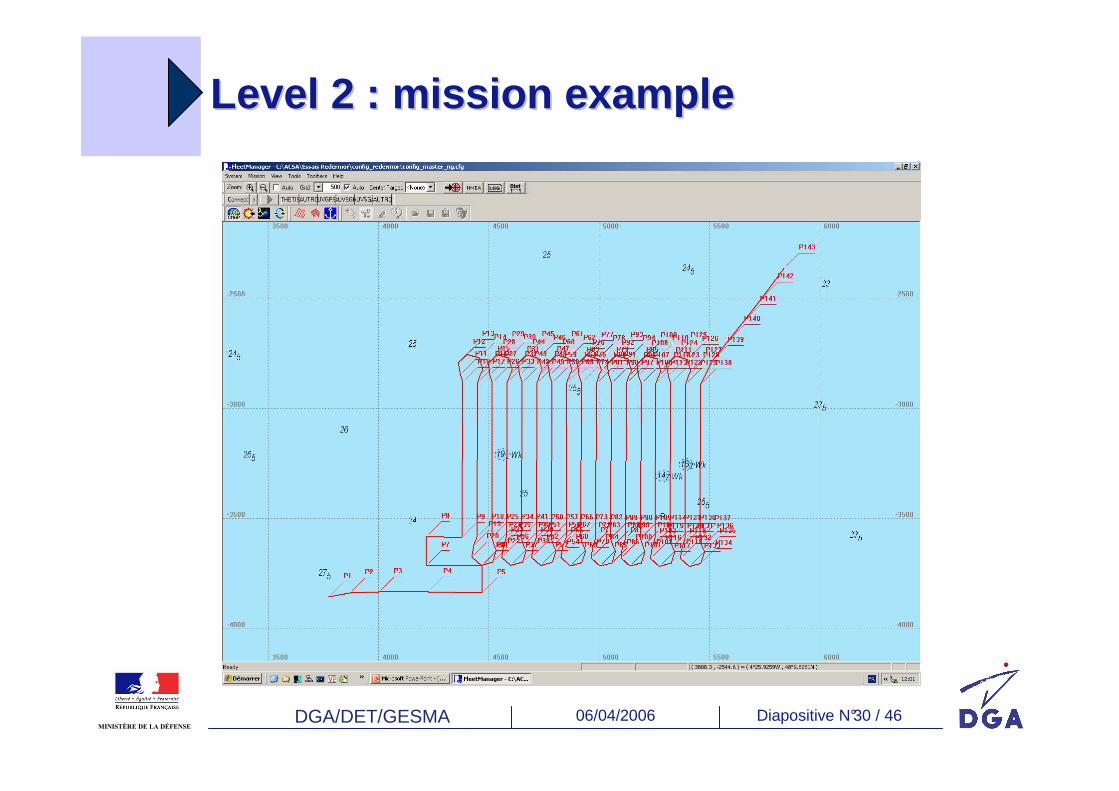
Level 2 : mission exampleLevel 2 : mission example

DGA/DET/GESMA 06/04/2006 Diapositive N°31 / 46MINISTÈRE DE LA DÉFENSE
Level 2 : mission script exampleLevel 2 : mission script example

DGA/DET/GESMA 06/04/2006 Diapositive N°32 / 46MINISTÈRE DE LA DÉFENSE
Level 3 : IOVAS MMI (Level 3 : IOVAS MMI (ProlexiaProlexia))

DGA/DET/GESMA 06/04/2006 Diapositive N°33 / 46MINISTÈRE DE LA DÉFENSE
Level 3 : IOVAS MMILevel 3 : IOVAS MMI

DGA/DET/GESMA 06/04/2006 Diapositive N°34 / 46MINISTÈRE DE LA DÉFENSE
Level 3 : interaction with environmentLevel 3 : interaction with environment

DGA/DET/GESMA 06/04/2006 Diapositive N°35 / 46MINISTÈRE DE LA DÉFENSE
Level 3 : interaction with environmentLevel 3 : interaction with environment

DGA/DET/GESMA 06/04/2006 Diapositive N°36 / 46MINISTÈRE DE LA DÉFENSE
Level 3 : Mission preparationLevel 3 : Mission preparation

DGA/DET/GESMA 06/04/2006 Diapositive N°37 / 46MINISTÈRE DE LA DÉFENSE
Level 3: Missions goalsLevel 3: Missions goals

DGA/DET/GESMA 06/04/2006 Diapositive N°38 / 46MINISTÈRE DE LA DÉFENSE
Level 3: Automatic planningLevel 3: Automatic planning

DGA/DET/GESMA 06/04/2006 Diapositive N°39 / 46MINISTÈRE DE LA DÉFENSE
Level 3: Automatic planningLevel 3: Automatic planning

DGA/DET/GESMA 06/04/2006 Diapositive N°40 / 46MINISTÈRE DE LA DÉFENSE
Level 3: mission script?Level 3: mission script?

DGA/DET/GESMA 06/04/2006 Diapositive N°41 / 46MINISTÈRE DE LA DÉFENSE
OnOn--going testgoing test
� Level 1 and 2 :� fully operational
� Level 3:� tested in simulation,� at sea this year.
� Adaptivity to be tested :� Wrong current direction in the initial planning of a survey
zone� Inspect (multi-aspect sonar acquisition) a contact

DGA/DET/GESMA 06/04/2006 Diapositive N°42 / 46MINISTÈRE DE LA DÉFENSE
OnOn--going testgoing testLevel 3 : Integration tested at the sea.

DGA/DET/GESMA 06/04/2006 Diapositive N°43 / 46MINISTÈRE DE LA DÉFENSE
Further worksFurther works
� Mine warfare: do sonar acquisition of the survey zone until the performance criteria is over a define threshold
� REA : Survey strategy with regards to sea bottom characteristics
� Optimization of long duration mission related to current and tide evolution

DGA/DET/GESMA 06/04/2006 Diapositive N°44 / 46MINISTÈRE DE LA DÉFENSE
ConclusionConclusion
� Petri nets are a good solution for supervision and adaptivity
� Difficulty of environmental database integration
� Planning algorithm seemed not so complicated at first stage…