focused technical project (ftp) - ros-industrial · focused technical project (ftp) title: cad to...
TRANSCRIPT

For Public Release July 21, 2015 DRAFT SwRI Proposal #: 10-65198G 1
Focused Technical Project (FTP) Title: CAD to ROS Participants: To be decided Research Site: TU Delft Robotics Institute Problem Statement For many applications, making use of the advanced capabilities of ROS is hindered by the extra conversion work required to import existing CAD information into a ROS readable format. One preliminary Solidworks plugin has been written, which is
heavily used despite its preliminary state. This shows that there is a need for such tools. The goal is to develop a (set of) tools which enable seamless conversion from any CAD system into ROS readable format. Project organization The project is divided in three parts each with a duration of one year, each representing a major milestone. Each part is further subdivided as detailed below. The results of some sub-parts will influence the subsequent project steps as shown below.

For Public Release July 21, 2015 DRAFT SwRI Proposal #: 10-65198G 2
Milestone 1: Exporting geometry and kinematics
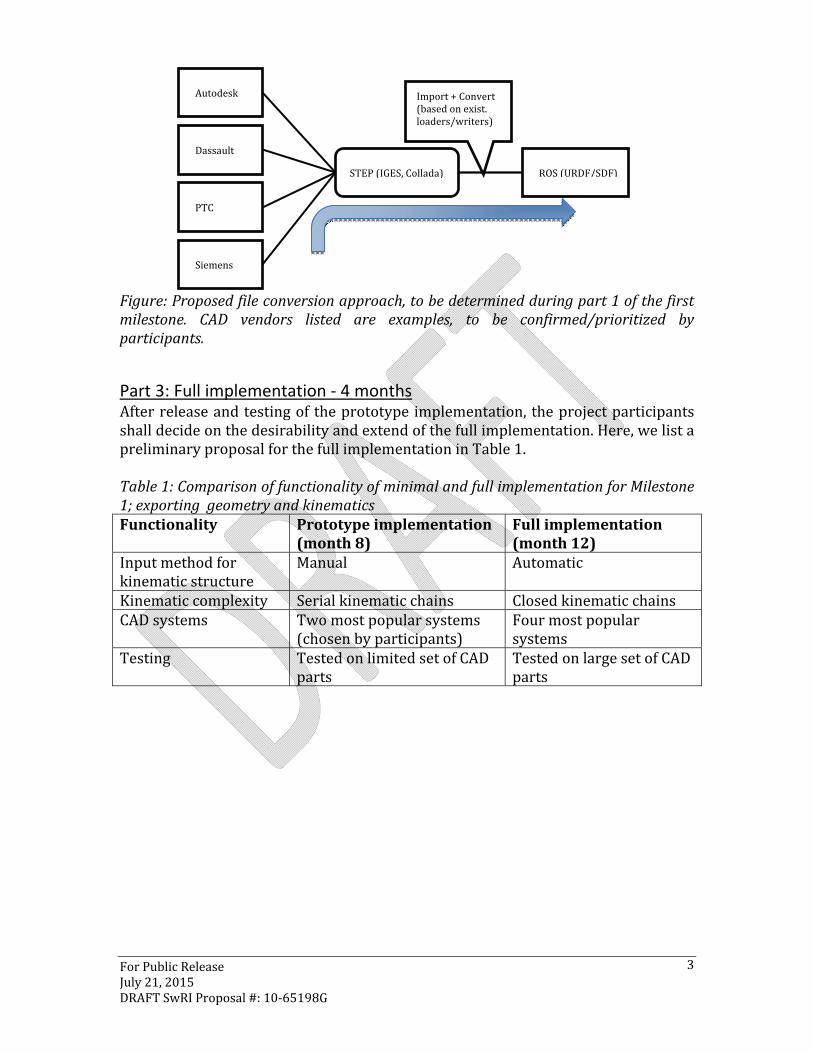
Part 1: Design proposal - 4 months In this part of the work, we shall gather the requirements and analyze relevant data formats and existing tools, leading to a design proposal to be accepted by the participants. The following steps shall be taken. 1- Requirements gathering for all three milestones (i.e., including kinematics, process parameters, tolerances, etc.) 2- Investigation of similarities/dissimilarities STEP/Collada/other format (mesh size, storage order, etc) for main CAD tools: a. Autodesk (Inventor) b. Dassault (Catia, SolidWorks) c. PTC (Creo, ProE) d. Siemens (NX, Solid Edge) 3- Investigation of support for expressing kinematic structure (joints) in various data formats, standardization by Denavit-Hartenberg convention or similar 4- Investigation of need for and implementation issues with closed kinematic chains 5- Design proposal – need OK from participants: a. Choice of intermediary data format b. Architecture for conversion tool(s) Part 2: Prototype implementation - 4 months The tool set shall be implemented according to the design proposal. The deliverable is a functional tool set with the minimally viable set of functions. The proposed functionality is listed in Table I alongside the functionality of the full tool set that shall be delivered in Part 3. Based on the outcome of part 1, we shall leverage existing CAD export tools for translation to one of the common formats such as STEP, IGES, or Collada, possibly accompanied by an additional file with a new dedicated format, containing the data that is not stored in the standard format, such as kinematic relations. The standard data format file plus accompanying file will then be loaded with a single conversion tool into ROS readable format.
For Public Release July 21, 2015 DRAFT SwRI Proposal #: 10-65198G 3
Figure: Proposed file conversion approach, to be determined during part 1 of the first milestone. CAD vendors listed are examples, to be confirmed/prioritized by participants. Part 3: Full implementation - 4 months After release and testing of the prototype implementation, the project participants shall decide on the desirability and extend of the full implementation. Here, we list a preliminary proposal for the full implementation in Table 1. Table 1: Comparison of functionality of minimal and full implementation for Milestone 1; exporting geometry and kinematics Functionality Prototype implementation
(month 8) Full implementation (month 12) Input method for kinematic structure Manual Automatic Kinematic complexity Serial kinematic chains Closed kinematic chains CAD systems Two most popular systems (chosen by participants) Four most popular systems Testing Tested on limited set of CAD parts Tested on large set of CAD parts
Autodesk
Dassault PTC
Siemens
STEP (IGES, Collada) ROS (URDF/SDF)
Import + Convert (based on exist. loaders/writers)

For Public Release July 21, 2015 DRAFT SwRI Proposal #: 10-65198G 4
Milestone 2: Engineering data to ROS Goal: Exporting engineering/process data (e.e, tolerances, pressures, feed rates, screw torques). Challenges: 1. URDF needs extension, SDF needs standard structure for annotations 2. Decide on priority (which data first?) – Ask industrial users and participants 3. Consideration of STEP Application Protocol AP242.
Part 1: Design proposal – 3 months This milestone requires additional investigations and a new design proposal according to the following details: - Requirements gathering: which engineering data to export, which precision required, how to map engineering data from solids onto meshes. - Choice of ROS format (URDF/SDF/other) in close collaboration with OSRF - Design proposal for extension of chosen ROS format to allow incorporation of engineering data. Alternatively, data could be maintained in non-ROS format, and ROS loaders/writers could be developed for this format. The result of Part 1 is a design proposal to be accepted by the project participants. Part 2: Prototype implementation – 5 months The design proposal is implemented and integrated with the ROS standards, which will need to include the new file format. The work roughly consists of: - Extension of plugins for CAD systems - Collaboration with OSRF for extension of data format - Extension of conversion tool made in milestone 1 The deliverable is testable software for exporting the types of engineering data most likely to be used by the participants. The test results should inform the decision to continue with full implementation in the next part. Part 3: Full implementation – 4 months The set of conversion tools will be completed, including documentation and user manual. Some time will also be reserved for support and maintenance of the tools developed so far. Part 3 will conclude with a list of recommendations for follow-on work, which may be conducted under the third milestone, or may be taken up by the ROS-I community.

For Public Release July 21, 2015 DRAFT SwRI Proposal #: 10-65198G 5
Milestone 3 (Optional) The goal for Milestone 3 is Mesh reconstruction from a measured point cloud. This is highly valuable for reconstruction within a ROS environment of parts or environments that were originally not created from a CAD tool. Examples include molds created by manual craftsmanship. The ability to import these shapes into the ROS environment will allow subsequent use for motion planning and automated assembly/machining operations.
Figure: Point cloud of desktop environment Figure: example of double curved part The work for Milestone 3 is not yet fully defined. The start date two years in the future warrants great sensitivity to ongoing developments outside the consortium, and the detailed plans should be drawn only close to the starting date. The work will include the following activities: - Investigation of existing tools - Method for inclusion of engineering data in reconstructed mesh - Part reconstruction - Environment/Scene reconstruction Technical Approach
Research Site The development for this project will be coordinated at the TU Delft Robotics Institute in Delft, The Netherlands. Development work will be done in Delft and by participants. Cooperation with CAD vendors is desired, and will be sought, but is not required. Software:
• Autodesk Inventor (TU Delft provided) • Dassault SolidWorks (TU Delft provided) and Catia (not formally secured yet) • PTC Pro-Engineer (not formally secured yet) • Siemens NX (not formally secured yet)
For Public Release July 21, 2015 DRAFT SwRI Proposal #: 10-65198G 6
Expected Outcome/Deliverables
Communication • TU Delft Robotics Institute shall provide quarterly project status reports to the participants. • TU Delft Robotics Institute shall send a project representative to the RIC-Americas annual meeting each year to present results of the project. • TU Delft Robotics Institute shall document any desired enhancements that remain incomplete at the end of each milestone. This document will be added to the ROS-I roadmap for future FTPs or other open-source initiatives.
Milestone 1 Part 1: Design proposal for CAD (+kinematics) to ROS conversion tools Part 2: Prototype implementation Part 3: Full implementation Milestone 2 Part 1: Design proposal for engineering data to ROS conversion tools Part 2: Prototype implementation Part 3: Full implementation Milestone 3 (Optional) Conversion tool for pointcloud to CAD data importable to ROS. Caveats
• Expect proper setup of original CAD model in terms of links and subassemblies. • Support will be provided only for one version of each CAD system (e.g., SolidWorks 2015) – version to be decided by participants and availability at TU Delft.
Open Source Software and Press Releases Since the project makes heavy use of existing file formats within ROS, the resulting software will be released, open-source, under a BSD or Apache 2.0 license as applicable. Video and photos of the file conversion software use cases will also be made publicly available. One or more press releases are anticipated for the project. Draft press release documents will be provided for each participant to review/approve before public release. Use of company logos is desired, but not required.
For Public Release July 21, 2015 DRAFT SwRI Proposal #: 10-65198G 7
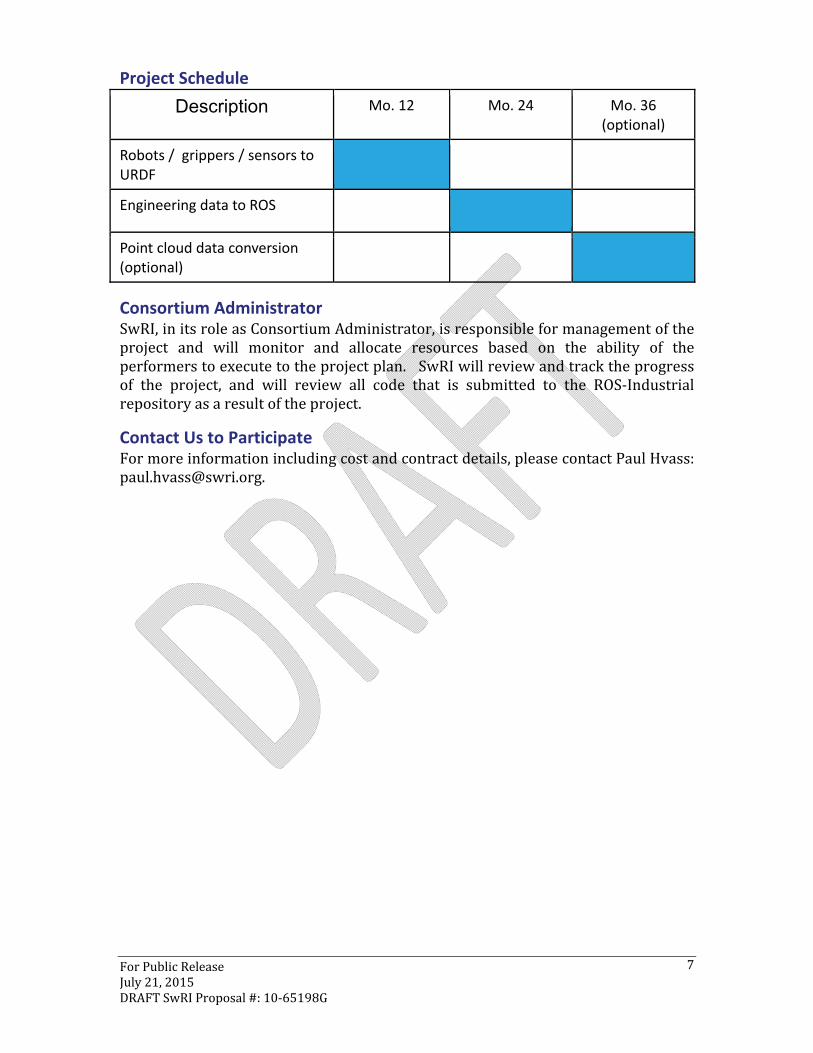
Project Schedule Description Mo. 12 Mo. 24 Mo. 36
(optional)
Robots / grippers / sensors to URDF
Engineering data to ROS Point cloud data conversion (optional)
Consortium Administrator SwRI, in its role as Consortium Administrator, is responsible for management of the project and will monitor and allocate resources based on the ability of the performers to execute to the project plan. SwRI will review and track the progress of the project, and will review all code that is submitted to the ROS-Industrial repository as a result of the project. Contact Us to Participate For more information including cost and contract details, please contact Paul Hvass: [email protected].