equations / variables vertical coordinate terrain representation grid staggering
DESCRIPTION
WRF Mass-Coordinate Dynamical Solver. Equations / variables Vertical coordinate Terrain representation Grid staggering Time integration scheme Advection scheme Boundary conditions Map projections Dynamics parameters. Flux-Form Equations in Mass Coordinate. - PowerPoint PPT PresentationTRANSCRIPT
– Equations / variables – Vertical coordinate– Terrain representation– Grid staggering– Time integration scheme– Advection scheme– Boundary conditions– Map projections– Dynamics parameters
WRF Mass-Coordinate Dynamical Solver
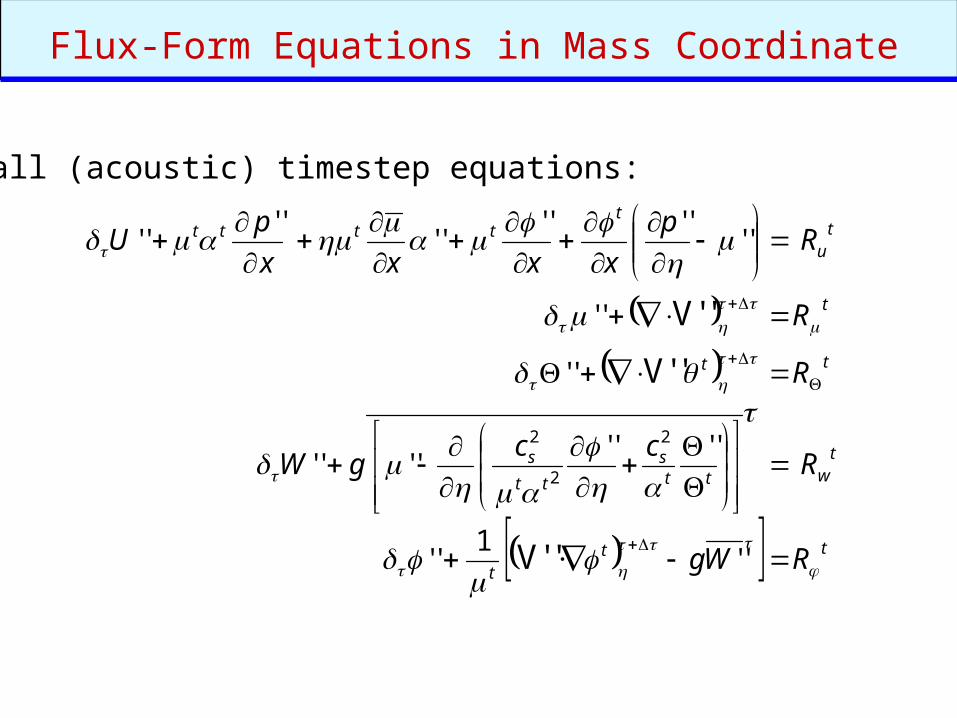
Flux-Form Equations in Mass Coordinate
ts
t
,
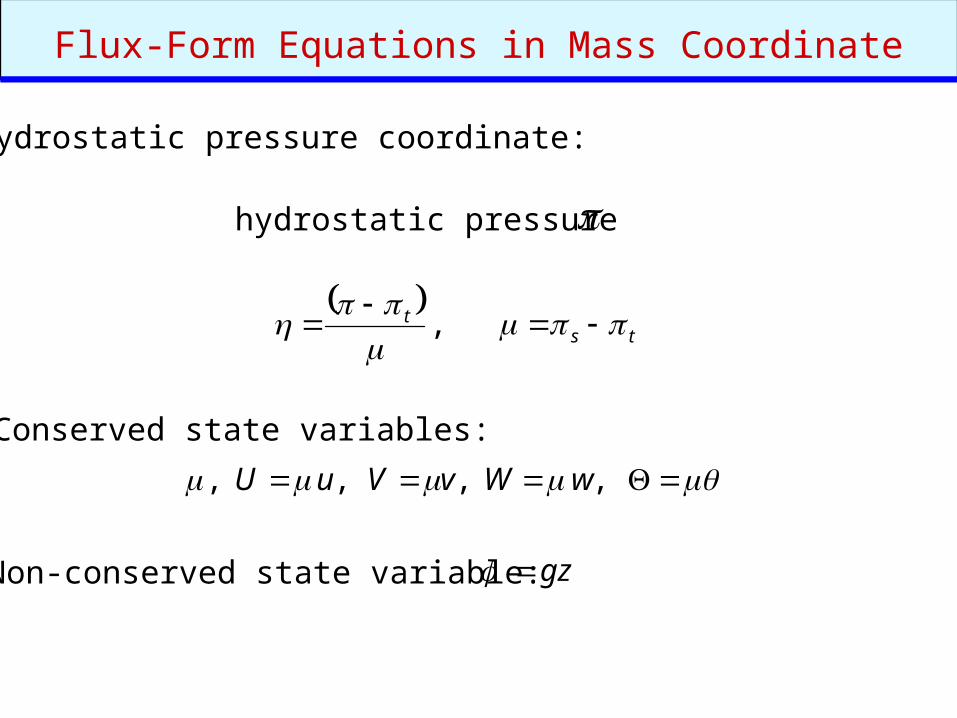
Hydrostatic pressure coordinate:
,,,, wWvVuU
Conserved state variables:
hydrostatic pressure
Non-conserved state variable: gz
Flux-Form Equations in Mass Coordinate
gwdt
d
x
U
t
Qx
U
t
w
x
Uwpg
t
W
u
x
Uu
x
p
x
p
t
U
0
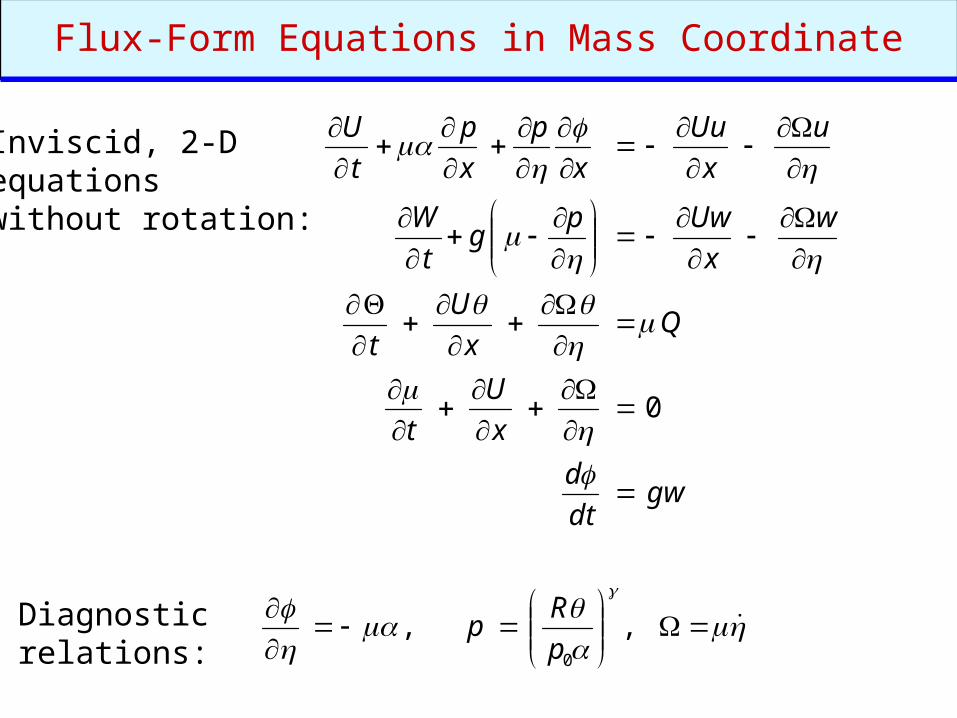
Inviscid, 2-Dequations without rotation:
Diagnosticrelations:
,,0p
Rp

Flux-Form Equations in Mass Coordinate
Introduce theperturbation variables:
)(,)(
;)(,)(
zpzpp
zz
w
x
Uwpg
t
W
u
x
Uup
xxxx
p
t
U
Momentum and hydrostatic equations become:
),,(),,,(
),,,()(
yxyxp
yxz Note –
likewise
Flux-Form Equations in Mass Coordinate
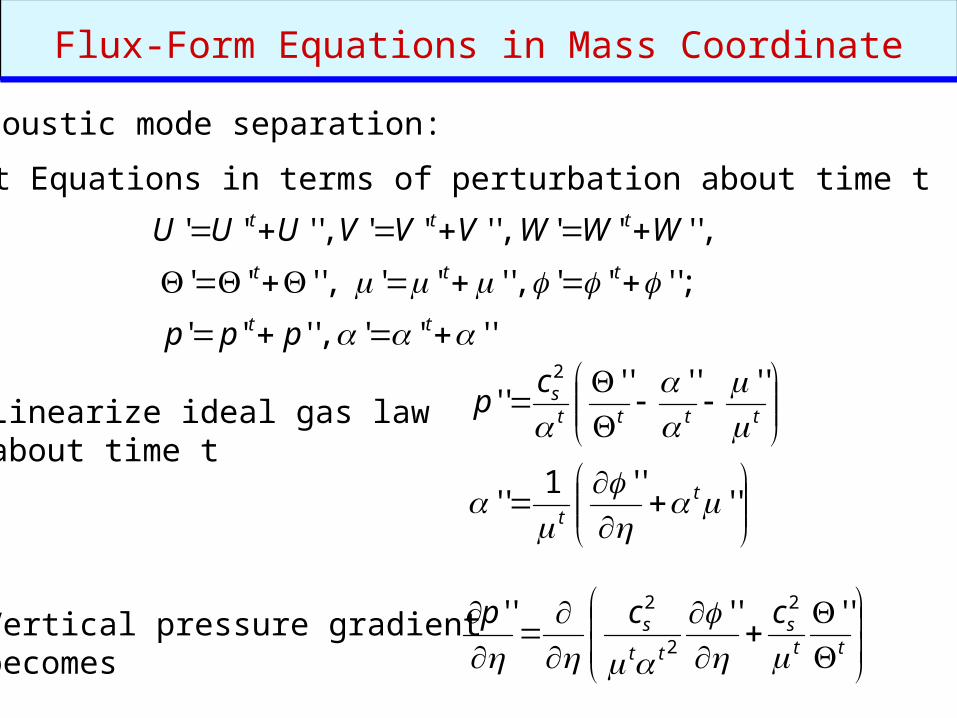
Acoustic mode separation:
Recast Equations in terms of perturbation about time t
'''',''''
;'''','''',''''
,'''','''',''''
tt
ttt
ttt
ppp
WWWVVVUUU
''''1
''
''''''''
2
tt
ttttscpLinearize ideal gas law
about time t
Vertical pressure gradientbecomes
tts
tt
s ccp '''''' 2
2
2
Flux-Form Equations in Mass Coordinate
ttt
twtt
s
tt
s
tt
t
tu
ttttt
RWg
Rcc
gW
R
R
Rp
xxxx
pU
''1
''
''''''''
''
''
''''''
''''
''
'V'
'V'
'V'
2
2
2
Small (acoustic) timestep equations:
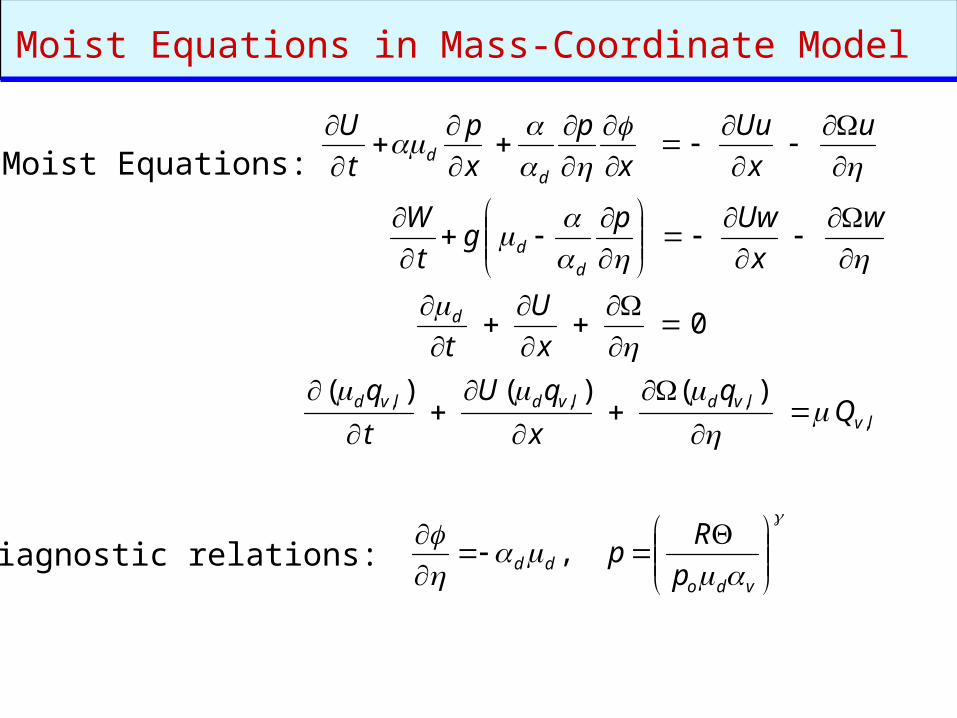
Moist Equations in Mass-Coordinate Model
Moist Equations:
vdodd
lvlvdlvdlvd
d
dd
dd
p
Rp
x
qU
t
q
x
U
t
w
x
Uwpg
t
W
u
x
Uu
x
p
x
p
t
U
,
)()()(
0
,,,,
Diagnostic relations:
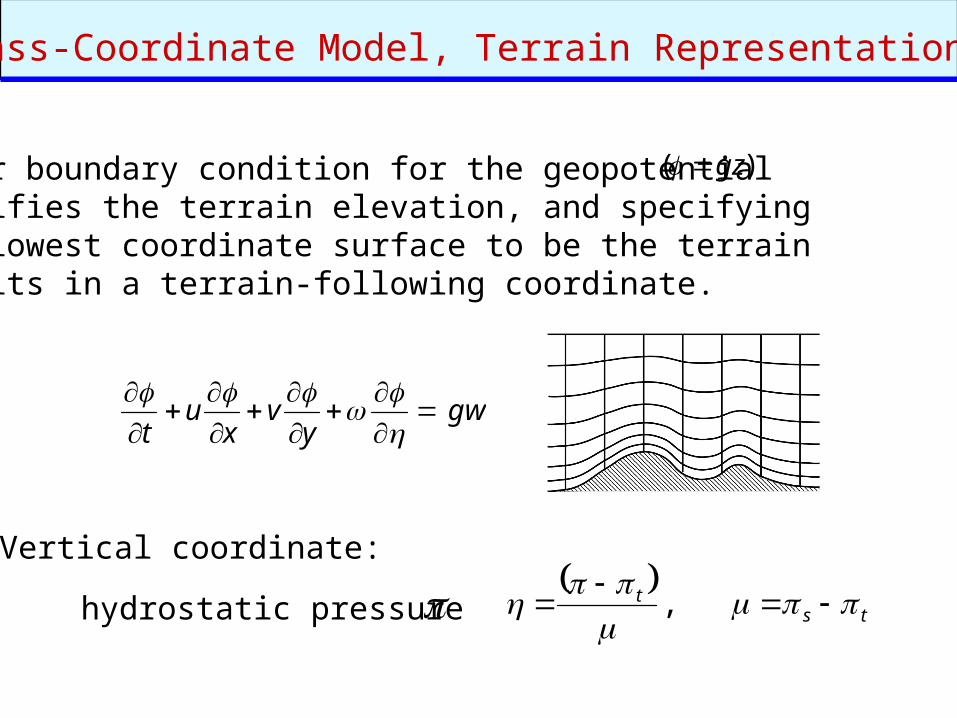
Mass-Coordinate Model, Terrain Representation
Vertical coordinate:
tst
,hydrostatic pressure
gwy
vx
ut
Lower boundary condition for the geopotential specifies the terrain elevation, and specifyingthe lowest coordinate surface to be the terrainresults in a terrain-following coordinate.
)( gz
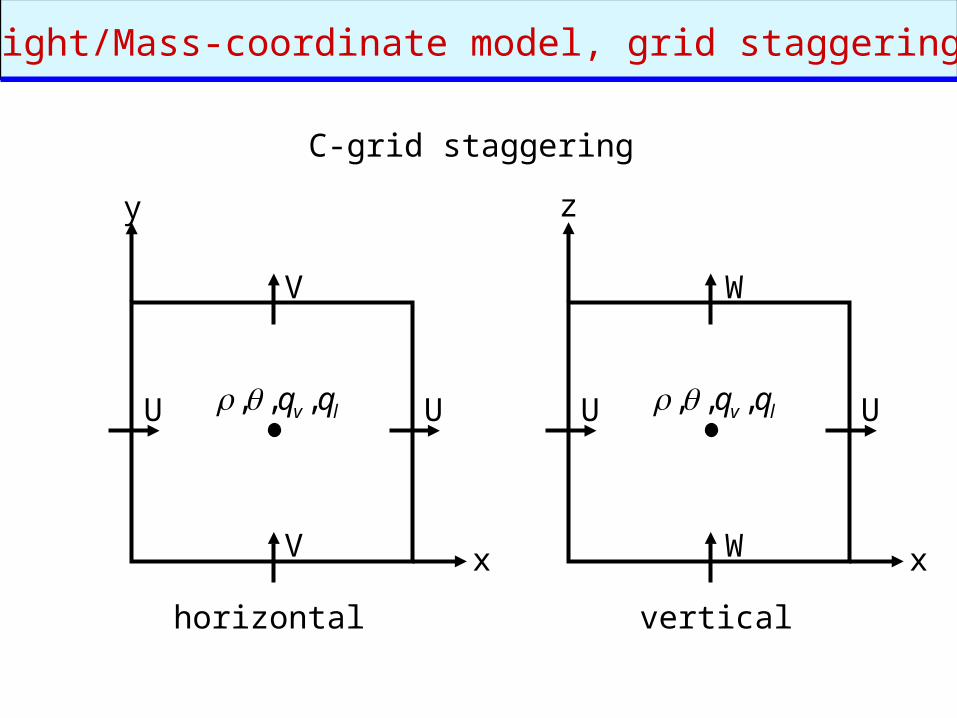
Height/Mass-coordinate model, grid staggering
z
W
W
U U
x
lv qq ,,,
V
V
U U
x
y
lv qq ,,,
C-grid staggering
horizontal vertical

Height/Mass-Coordinate Model, Time Integration
3rd Order Runge-Kutta time integration
Rt
Rt
Rt
tt
t
tt
tt
3
2
3
1
1advance
Amplification factor
241;;
41 tk
AAki nnt
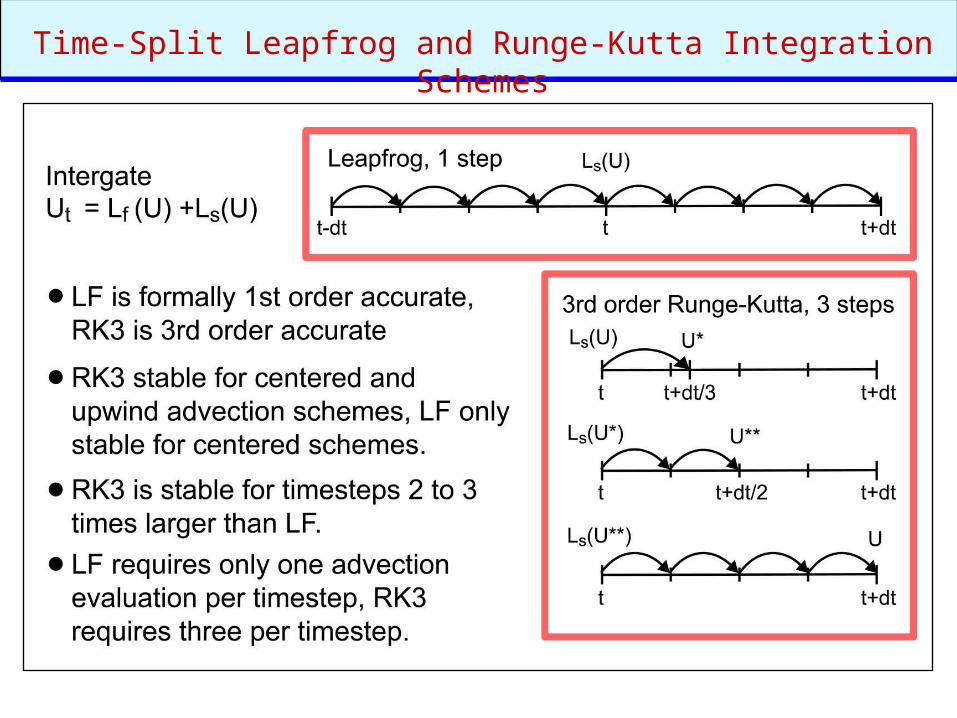
Time-Split Leapfrog and Runge-Kutta Integration Schemes
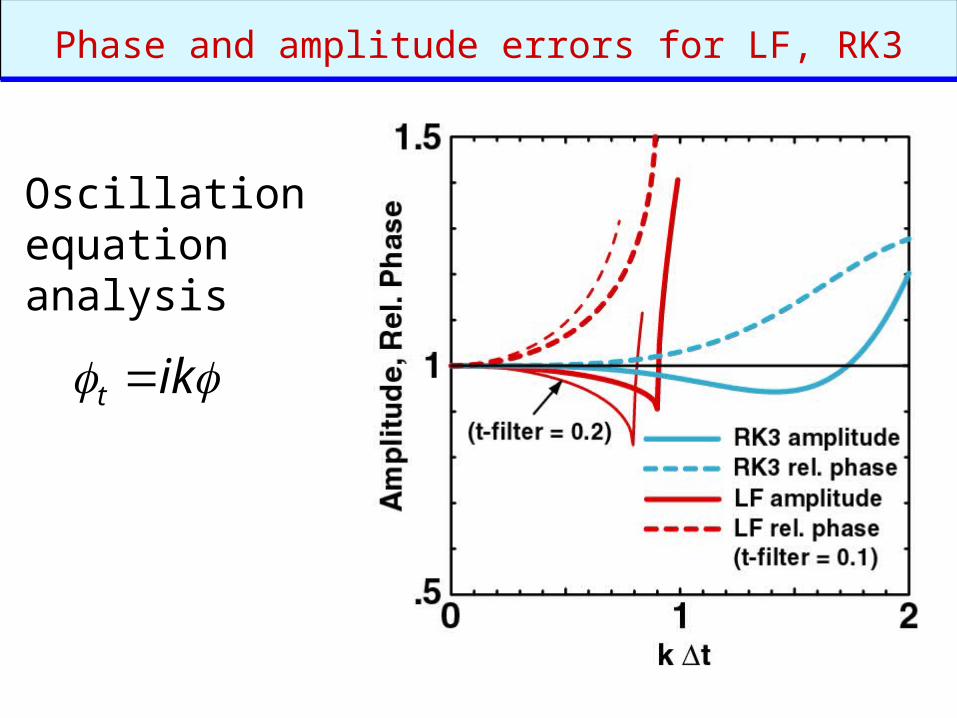
Phase and amplitude errors for LF, RK3
Oscillation equationanalysis
ikt
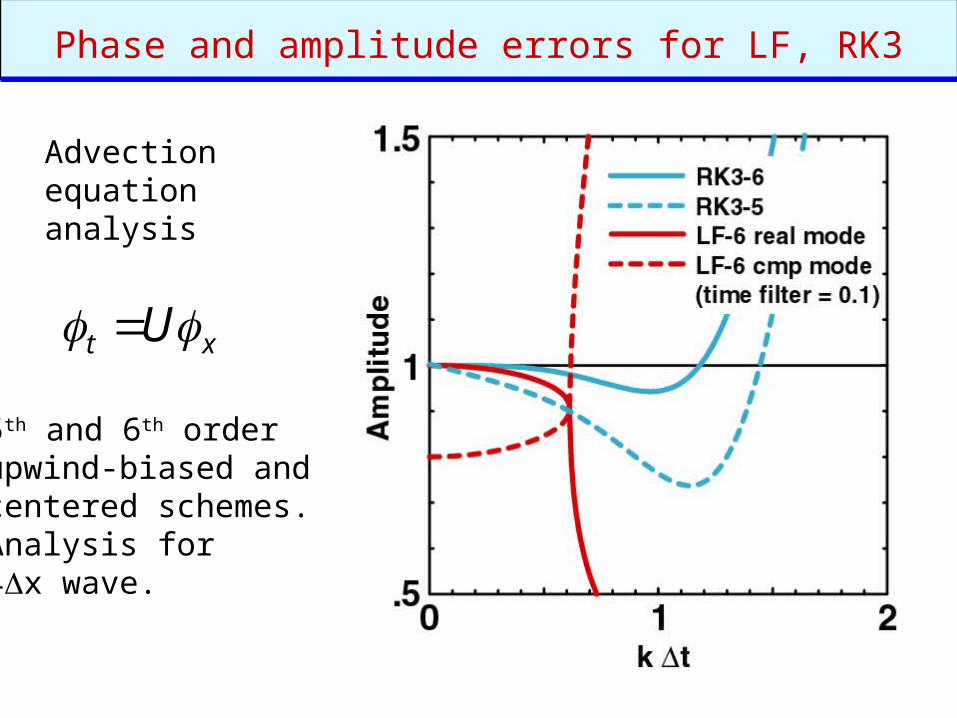
Phase and amplitude errors for LF, RK3
Advection equationanalysis
xt U
5th and 6th order upwind-biased and centered schemes.Analysis for 4x wave.
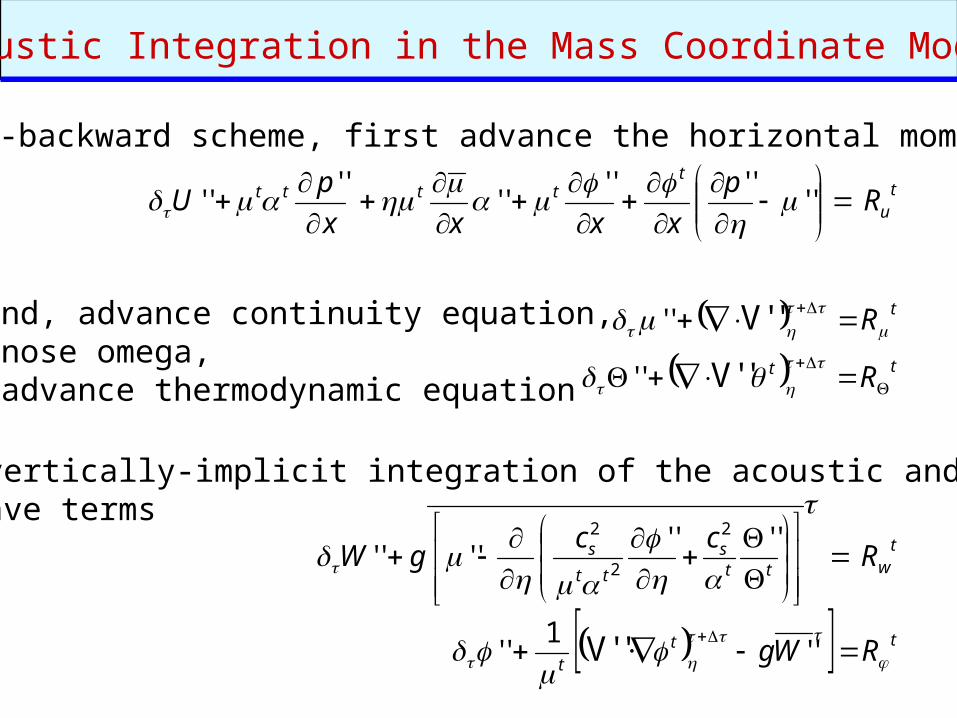
Acoustic Integration in the Mass Coordinate Model
Forward-backward scheme, first advance the horizontal momentum
Second, advance continuity equation,diagnose omega,and advance thermodynamic equation
ttt
twtt
s
tt
s
tt
t
tu
ttttt
RWg
Rcc
gW
R
R
Rp
xxxx
pU
''1
''
''''''''
''
''
''''''
''''
''
'V'
'V'
'V'
2
2
2
Finally, vertically-implicit integration of the acoustic and gravity wave terms
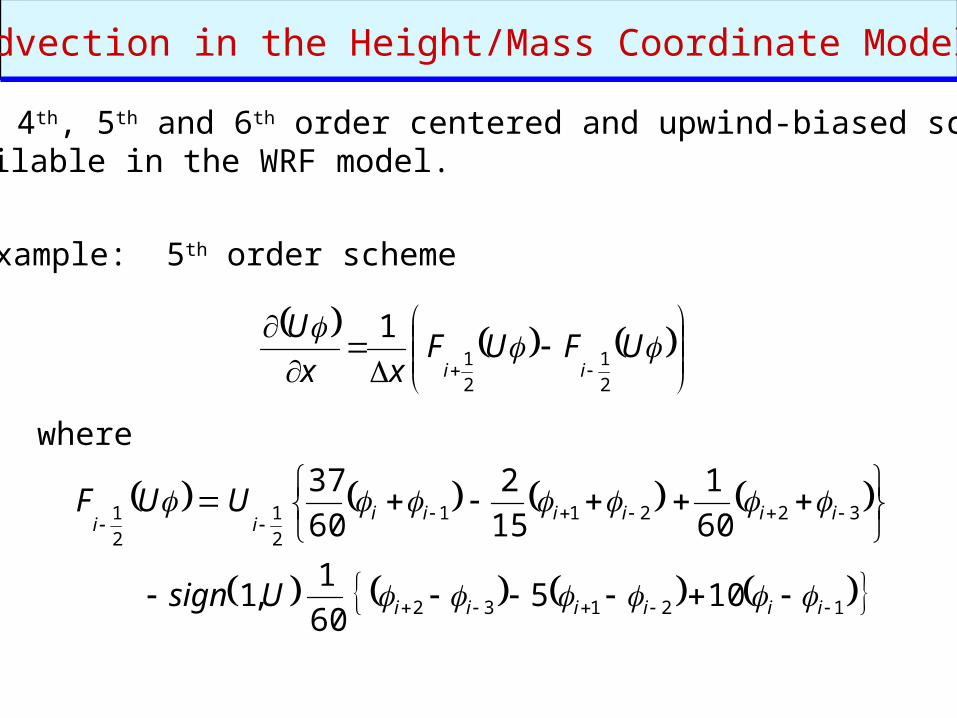
Advection in the Height/Mass Coordinate Model
2nd, 3rd, 4th, 5th and 6th order centered and upwind-biased schemesare available in the WRF model.
Example: 5th order scheme
UFUFxx
Uii
2
1
2
1
1
12132
32211
2
1
2
1
10560
1,1
60
1
15
2
60
37
iiiiii
iiiiiiii
Usign
UUF
where
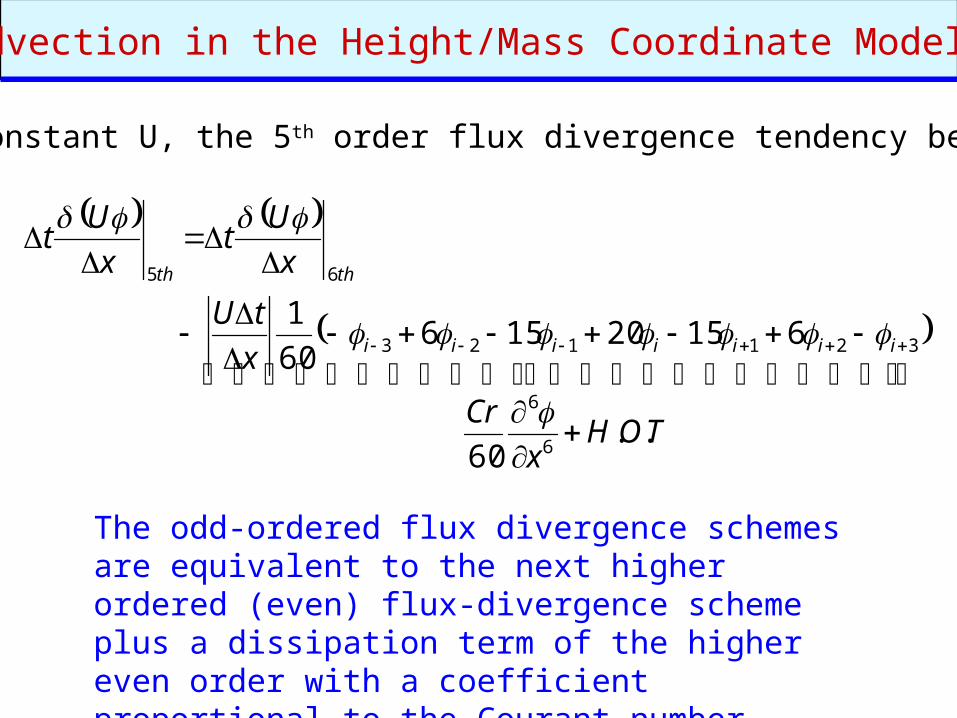
For constant U, the 5th order flux divergence tendency becomes
TOHx
Cr
x
tU
x
Ut
x
Ut
iiiiiii
thth
..60
6152015660
1
6
6
321123
65
Advection in the Height/Mass Coordinate Model
The odd-ordered flux divergence schemes are equivalent to the next higher ordered (even) flux-divergence scheme plus a dissipation term of the higher even order with a coefficient proportional to the Courant number.
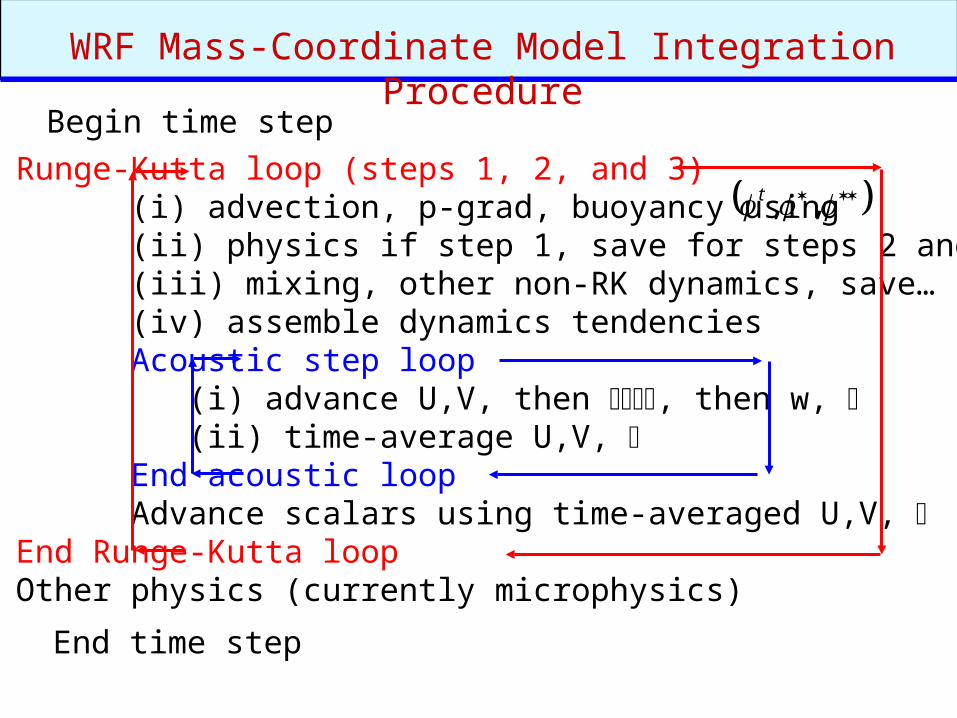
Runge-Kutta loop (steps 1, 2, and 3) (i) advection, p-grad, buoyancy using (ii) physics if step 1, save for steps 2 and 3 (iii) mixing, other non-RK dynamics, save… (iv) assemble dynamics tendencies Acoustic step loop (i) advance U,V, then , then w, (ii) time-average U,V, End acoustic loop Advance scalars using time-averaged U,V, End Runge-Kutta loopOther physics (currently microphysics)
Begin time step
End time step
WRF Mass-Coordinate Model Integration Procedure
,,t
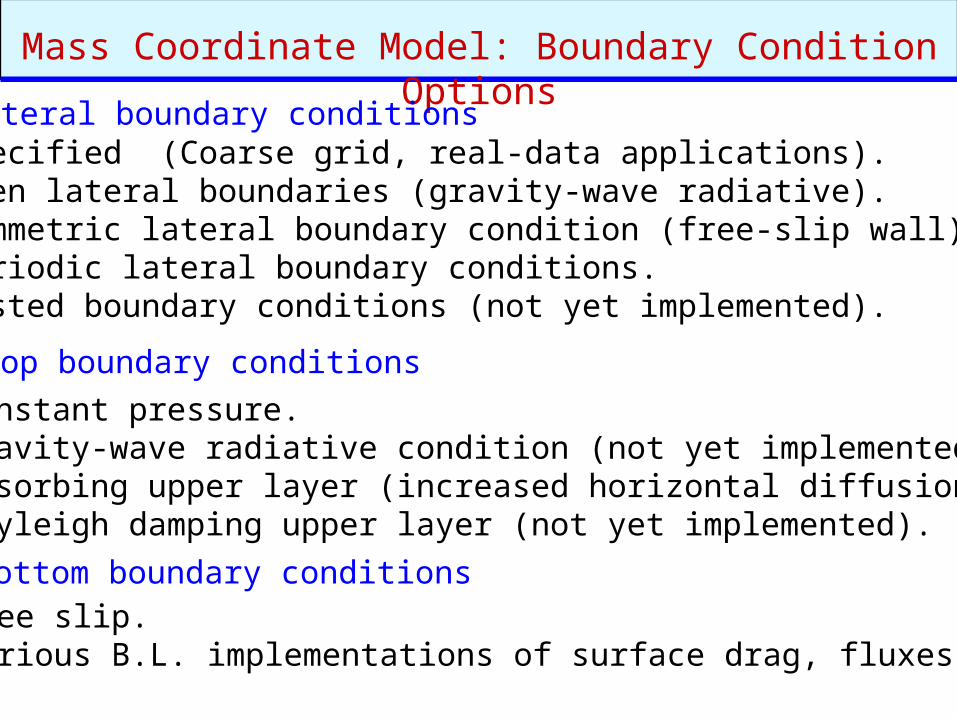
Mass Coordinate Model: Boundary Condition Options
1. Specified (Coarse grid, real-data applications).2. Open lateral boundaries (gravity-wave radiative).3. Symmetric lateral boundary condition (free-slip wall).4. Periodic lateral boundary conditions.5. Nested boundary conditions (not yet implemented).
Lateral boundary conditions
Top boundary conditions
1. Constant pressure.2. Gravity-wave radiative condition (not yet implemented).3. Absorbing upper layer (increased horizontal diffusion).4. Rayleigh damping upper layer (not yet implemented).
Bottom boundary conditions1. Free slip.2. Various B.L. implementations of surface drag, fluxes.
Mass/Height Coordinate Model: Coordinate Options
1. Cartesian geometry (idealized cases)2. Lambert Conformal3. Polar Stereographic4. Mercator
3rd order Runge-Kutta time step
Acoustic time step
Divergence damping coefficient: 0.1 recommended.
Vertically-implicit off-centering parameter: 0.1 recommended.Advection scheme order: 5th order horizontal, 3rd order vertical
recommended.
Mass Coordinate Model: Dynamics Parameters
Courant number limited, 1D: 73.1
x
tUCr
Generally stable using a timestep approximately twice as large as used in a leapfrog model.
2D horizontal Courant number limited: 2
1
h
CC sr
stepsacousticofnumberRKsound t
External mode damping coefficient: 0.05 recommended.