embedded minimal surfaces with an infinite number of ends
TRANSCRIPT

Invent. math. 96, 459 505 (1989) [nventiones mathematicae �9 Springer-Verlag 1989
Embedded minimal surfaces with an infinite number of ends *
Michael Callahan, David Hoffman, and William H. Meeks, III University of Massachusetts, Amherst, Massachusetts 01003, USA
Riemann [29] considered the problem of characterizing the minimal surfaces in 11t 3 that are the union of round circles in parallel planes. He solved it by establishing the existence of a 1-parameter family ~(t , te(0, oo), of properly embedded singly periodic minimal surfaces with the following property: up to rigid motion and homothety, every minimal surface expressible as the union of circles in parallel planes is either a subset of some ~./~t or a subset of the catenoid. The surface Jgt is defined in terms of elliptic functions on the rectangu- lar torus 112/{n+itmln, me;g} and can be realized conformally as an infinite cylinder that is punctured at regular intervals. It may also be expressed confor- really as 112"--= C\{0}, punctured in an infinite discrete set of points, X,. Consid- ered as lying on $2=I12w{oo}, the set X, has limit points 0 and oo. In this conformal parameterization the third coordinate function of o~t can be expressed as lnlzl and circles ]zl=R are mapped onto round circles or straight lines in the plane x 3 = In R. The image is a straight line in IR 3 precisely when the circle of radius R in II~* contains a point peX,. Such a point can be considered to be the point at infinity of the end of JC{, corresponding to a punctured neighborhood ofp. This annular end o f , ~ t is flat in the sense that it is asymptotic to the plane x 3 = l n R. In particular, ~#~ is a planar domain (homeomorphic to a subset of the plane) with an infinite number of annular ends and two limit ends corresponding to the points 6 and oo on the conformal completion of I1;* to S 2. For an exact definition of ~ see Appendix A.2. See Image 1 for a picture of the surface ~
Recently, examples of embedded minimal surfaces with 3 and 4 annular ends and finite genus have been discovered. [5, 3, 12, 14, 15, 18, 27] These examples naturally led us to conjecture that for j > 3, there exists a properly embedded minimal surface Nj of genus j - 2 with j annular ends. The existence of Riemann's example suggested that this sequence N i converges smoothly on compact subsets of N3 to a 1-periodic minimal surface with an infinite number of annular ends and infinite genus as j--* oo. This limit surface appears as the
* The research described in this paper was supported by research grant DE-FG02-86ER250125 of the Applied Mathematical Science subprogram of the Office of Energy Research, U.S. Department of Energy, and National Science Foundation grants DMS-8503350 and DMS-8611574

460 M. Callahan et al.
,.o
Image 1, The Riemann example .~', for t = 1. This surface is described in the introduction and in Appendix A.2
simplest example of a family of 1-periodic minimal surfaces that generalize Rie- mann ' s example. The existence of this family is the main result of this paper :
Theorem 1. For every positive integer k there exists a properly embedded minimal surface Mk with the following properties:
1. Mk has an infinite number of annular ends. 2. Mk is invariant under the group of translations T generated by T: ~ - - ~
+ (0, O, 2). 3. Mk/T has genus 2k + 1 and two ends. 4. The symmetry group of Mk/T has order 8 ( k + 1). 5. Reflection in the plane {x3 = n + 1/2}, ne~,, is a symmetry of M k. 6. Mk/T has .finite total curvature - 4 ~ (2 k + 2). 7. All the ends of Mk are fiat; they are asymptotic to the planes x3=n,
ne TL 8. M k r { X 3 = n}, n~Z, consists of k + 1 equally spaced straight lines meeting
at (0, O, n). 9. Mkr~ {x3 =c} , cq~7Z, is a simple closed curve.
10. The subgroup R of the symmetry group of Mk consisting of rotations about the x3-axis has order k + 1 and is generated by rotation by 2 ~z/(k + 1).

Embedded minimal surfaces with an infinite number of ends 461
Image 2. The example M~ in Theorem !
11. M k is symmetric under reflection through the k + 1 vertical planes contain- ing the x3-axis and bisecting the lines of property 8.
12. The .full symmetry group of Mk is generated by T, R, one of the reflections in 5., rotation about one of this lines in 8, and reflection through one of the planes in 11.
See I m a g e s 2 and 3 for p ic tu res of M1 a n d m 2.

462 M. Callahan et al.
Surface M 2
Image 3. The example M2 in Theorem 1
In fact, properties 1.-5. force properties 6.-12. (It is particularly interesting that properties 1.-5. force Mk/T to have finite total curvature.) The proof of this will appear in a subsequent paper [4], where the question of uniqueness of the examples of Theorem 1 will also be treated. In [4], we will also investigate global properties of properly embedded minimal surfaces with more than one topological end and an infinite symmetry group.
In Section 1, we derive an analytic representation for the surface Mk. This representation has one free parameter and produces the surface provided a period condition, (9), is satisfied. If (9) is satisfied, the results of Section 1 also show that the surface we produce has all the properties of Theorem 1, except embeddedness.

Embedded minimal surfaces with an infinite number of ends 463
Assuming that (9) is satisfied for some parameter value, we prove in Section 2 that the surface is embedded.
In Section 3, we prove that the period condition (9) may be satisfied; this completes the proof of Theorem 1. We do this via consideration of the conjugate surface. We note that the constructions in Section 3 almost suffice to give an independent existence proof of Theorem 1. The gap is explained in Remark 6.
Section 4 constructs the examples of Theorem 1 by blowing up a singularity in a sequence of compact minimal annuli. In [-4] this procedure will be extended to construct other families of periodic minimal surfaces which cannot yet be produced by the technique of Section 1.
In the Appendix we derive a symmetric representation of the one-parameter families produced in Section 1. Of interest in itself, this representation was essen- tial for numerical computat ion of the periods, when k > 1, and creation of the computer images via the Weierstrass representation. We also discuss the analytic representation of the Riemann examples and compare it to those of the surfaces m k �9
Acknowledgemen t s . The images in this paper were produced using a software system for technical graphics designed and implemented by James T. Hoffman. A description of this system and color pictures of the surfaces described in this paper appear in [2]. The ability to produce clear renditions of the surfaces quickly using this system made our work easier and suggested lines of inquiry. In particular, the conjugate surface construction of Section 3 was inspired by early pictures of the surfaces. They were produced using a Ridge 3200 computer, a Raster Technologies Model One/380 graphics engine and an Apple Laserwriter. James T. Hoffman also drew some of the line drawings used as figures in this paper.
We would like to thank Yi Fang for helpful criticisms of the paper.
1. Analytic construction of the examples
1.1. General technique
The examples of Theorem 1 were found using a general technique for writing down analytic representations for minimal surfaces. In this section we will describe and apply this technique.
We use the Weierstrass representation for minimal surfaces. It requires the specification of a Riemann surface M and a meromorphic function g: M--*S 2 (where S 2 is considered to be the Riemann sphere, S 2 = l ~ u {oc}). The function g is the Gauss map of the surface. In addition, one must specify a holomorphic 1-form q on the surface. One then gets a minimal immersion of M into ~13 defined by
(l_g2)~ o
X(z)=ae | i([-g2). (1) d zo 2gq
where z o, z ~ M and z 0 is fixed. Regularity requires that the zeros of q lie exactly at the poles of g and have twice their order. The immersion is well-defined on M only if the three 1-forms of (1), which we will call the Weierstrass forms,

464 M. Ca l l ahan et al.
have no real periods; otherwise it is well-defined on some covering space of M. (See [26] for a discussion of the Weierstrass representation.)
The behavior of the ends of a complete minimal surfaces in terms of its conformal geometry has been well studied. An end of finite total curvature is conformally a punctured disk and, if it is embedded, is asymptotic to either a plane or a catenoid. It is a theorem of Osserman that a complete minimal surface of finite total curvature is conformally a compact Riemann surface punctured in some collection of points {Pl . . . . , Pr} (corresponding to the points "a t the ends") and the Gauss map g extends meromorphically to all of [26]. A theorem of Jorge-Meeks shows that the degree of g on M is k + r - l , where k is the genus of _~r and r is the number of ends, precisely when the ends are all separately embedded [19, 9, 8].
In fact, the orders of g and t/at the puncture points determine the asymptotic behavior of the ends. Since we are interested in embedded surfaces, the normals at the ends are all parallel, and we may assume without loss of generality that they are vertical. In that case, the order of g determines the kind of end, whether it is plane-like or catenoid-like. If g has a simple zero or a simple pole, the end is catenoid-like (the vertical component grows logarithmically); if it has a higher-order zero or pole, the end is plane-like (the vertical component is bounded). In any case, the order of r/ is determined by the requirement that the first and second Weierstrass forms have poles of order 2. (This follows from the obvious requirement that, outside some compact set of IR 3, the end be a graph over the horizontal plane.) These results on the orders of g and t/ will be summarized in Fig. 1 below. (See [9, 8], [15] or [30] for further information.)
Our technique is applicable to embedded minimal surfaces with ends of these two types whose symmetries include a group of rotations around a line parallel to the normals at the ends. In particular, the equations for all the known properly embedded minimal surfaces with finite total curvature are easily motivated by our technique.
Denote the Riemann surface by M and the group of rotations around a line parallel to the end normals by R. If ~ is continuous, the surface is a surface of rotation. Hence, it is a catenoid or a plane. Otherwise, we may assume, without loss of generality, that R consists of rotations about the line by multiples of 2~/m, for some fixed integer m, and that the line is the x3-axis. Let R be the group conformal diffeomorphisms of M induced by R and note that the surface M is a branched covering of M/R. The values of the Gauss map on a fiber above a point in the quotient surface constitute an orbit of the rotation group R acting on S 2. In particular, since the rotations are around the x3-axis, the values of g on a fiber have the form {zwJI0 < j < m} where w is a primitive m-th root of unity. Therefore, the meromorphic function g" is well-defined on the quotient Riemann surface M/R. To write down an equation for g", we exploit the fact that M/R is often a more manageable surface to describe than M.
We observe that the covering M--* M/R extends to a covering M ~ M/R, where M is the surface obtained from M by filling in the puncture points at the ends; since rotation around an axis parallel to the normals of the ends

Embedded minimal surfaces with an infinite number of ends 465
takes each end into itself, we simply let the points p~ at the ends be fixed by the elements of R. The branched points of the covering 1~3 ~ ~r/R thus corre- spond to points on the axis of rotation and to the ends of the surface. Since g extends meromorphically to M, g" extends meromorphically to )~/R.
We now consider the behavior of the Gauss map at an end in the presence of the rotational symmetries R. A catenoid-like end still produces a simple zero or a simple pole in g. However, a plane-like end must correspond to a zero or a pole of order j m + 1, where j is a positive integer and m is the order of the symmetry group R. (To see this, take a point on the surface far out on the end. There is an approximately circular arc which connects this point to its image under a rotation by 2~/m about the vertical axis. Now consider the behavior of the Gauss map along this arc. It clearly must make j+(l/m), j > 0 , turns about the vertical axis - a one-mth turn because the normal vector at the ends of the arc are related by a 2rc/m rotation, plus an arbitrary number of full turns. Then the total turning about the vertical axis of the normal vector i s j m + 1, and the end is catenoid-like if and only if j=0 . ) In both cases, because the point Pi is a branch point of order m of the covering ]~3 --* M/R, the function g" on the quotient surface at the projection of p~ onto M/R has the same order as the function g has at the branch point p~ on M.
Further, the order of the Gauss map is constrained at points on the axis of rotational symmetry. There, the normal is vertical and g must have a zero or pole of order jm-1, where j is again a positive integer. Because the covering is branched with order m at an axial point, the function g" on M/R again has the same order as the function g has at the corresponding branch point o n /~f.
We summarize the observations of the preceding two paragraphs in Figure 1. We also include points on the surface with vertifical normals which are neither axial points nor ends. There g has a zero or pole on A4, with the order determined by simple geometric considerations: regular points are simple; umbilics have higher order. (The behavior of q is determined by the rule that, on M (not 1~), q is holomorphic with zeros precisely at the poles of g but with twice the order.) However, because these are not branch points of the covering M ---, M/ R, the order of gm on M/R is m times the order of g on any point in the fiber in /~3. Geometrically, this corresponds to the fact that a vertical normal on the surface at a point off the axial of rotation is replicated m times due to the order-m rotational symmetry.
Our prescription for writing down equations can now be quickly summarized. First, one determines the order m of the cyclic group of axial rotations R and the Riemann surface which will play the role of ]~/R. Using the rules of Fig. 1, one can then write down the divisor for g" and, from there, get an equation for g". This equation defines an m-sheeted branched covering of the surface M/R, which, it is not hard to see, must be equivalent to the covering 1~. Next, one writes down a divisor for r/ on the branched covering surface using Fig. 1 (and recalling that r/'s poles and zeros can lie only at the poles and zeros of g). Note that q is determined up to multiplication by a nonzero complex number. One then has g, t/ and the surface on which they are defined everything the Weierstrass representation requires.

466 M. Ca l l ahan et al.
ATI M / R g~
g t/
Ca teno id 1' - 1 0 1 End ~ + I - 2 + 1
Plane " - j m - 1 + 2jm - j m - 1 End ~, + j m + 1 - 2 + j m + 1
Axial "~ --jm + 1 + 2 j m - - 2 - j m + 1 Poin t ,L + j m - 1 0 + j m - 1
Non-Axia l T j + 2j - j m Poin t ~ + j 0 +ira
Fig. 1. Orders of zeros and poles. A posi t ive number denotes the order of a zero. The surface has ro ta t iona l symmet ry of o rde r m abou t the vertical axis. Here j is a posi t ive integer, which is the same for all co lumns at a given end, bu t which may vary between ends
It should be pointed out that this does not guarantee the existence of the surface. On the contrary, existence requires that one prove that the Weierstrass forms have no real periods. Usually, constants in the equations will have to be adjusted to eliminate periods; often it is difficult to show that it is possible to kill the periods off.
1.2. The examples of Theorem I
We now turn to our examples, the infinite-ended surfaces of Theorem 1. For the moment, assume that M k exists.
The minimal immersion of Mk into p, 3 modulo the translations along the x3-axis is a minimal immersion of Mk/T into ~3/~-, where T is the group of conformal diffeomorphisms of M induced by the group of translations T. The quotient surface Mk/T can be considered to be the part of M k lying between the planes x3 --- 0 and x3 = 2, with the intersection curves in these planes identified by vertical translation. (See Image 4.) Theorem 1 states that this surface has genus 2k+ 1 and two ends. We will find an immersion of this surface into IR 3 with one period, which will generate the translational symmetries I". Except for this period of the third Weierstrass form, the technique described in Sec- tion 1.1 applies to this quotient surface.
Denote by M the surface Mk/T, for some fixed k. This surface is symmetric under rotation by 2rc/(k+ 1) around the x3-axis. Also, the normals at the ends are vertical. Denote by R the diffeomorphisms these rotations induce on the conformal compactification )~.
We determine the genus of M/R by computing its Euler characteristic. Let the number of fixed points of R be n. Then by the Riemann-Hurwitz formula
z(M/R)= Z(ffI)-n ~-n, (2) k + l

Embedded minimal surfaces with an infinite number of ends 467
f .
Image 4a. The surface M2/T. This is actually the portion of M2 between x 3 : 0 and x3 = 2
........ ~ ~ / i ~ ,~ : + ~ jy: s L
lmage4b . The portion of the surface M2 between x3=1/2 and x3=5/2. The entire surface can be constructed by translations of this piece

468 M. Callahan et al.
recalling that k + 1 is the order of R. Since M is a compact surface of genus 2 k + l , it has Euler characteristic - 4 k . The number of fixed points, n, of R is equal to the number of ends in /~, which is 2, plus the number of points of M on the axis of rotation. We show that this is also 2 by considering the locations of zeros of g.
By the aforementioned theorem of Jorge-Meeks [19] and the fact that M has finite total curvature, the degree o fg on )~ must be 2 k + 2 . (This is property 6. of Theorem 1.) Because M is embedded, one of the plane ends of Gr must correspond to a zero of g (downward-pointing normal) with order j(k+ 1)+ 1, for j a positive integer. (See Fig. 1.) Since the degree of g is 2 k + 2 , the zero must have order k+2 . That leaves k zeros to be found. Note that a zero of g off the axis would be part of an orbit of R, so that even one such zero would produce k + 1 zeros in total; this is impossible. Therefore the only possibility
is that there is one point with a downward normal on the axis, which, from the table, would contribute a zero of order k. Of course, a similar argument shows that the other plane end has an upward-pointing normal and that there is one point on the axis with upward-pointing normal. Since any point on the axis must have vertical normal, there are only two such points. (Note that we have just found all the vertical normals on the surface. We will use this later to write down the divisor for g.)
Therefore, we find that n = 4 (the two ends plus the two axial points). By (2),
- 4 k - - 4 z ( M / R ) = k + l §
Thus M/R is a torus. We can represent the torus )~/R as the complex plane modulo a lattice
L:={m+ne)lm, ne7Z}, with co~(12. We now determine the symmetries of the lattice L by considering the symmetries of the quotient surface. At the same time, we will locate the points in the torus which correspond to the four points with vertical normals described above: the axial points with up and down nor- mals and the planar ends with up and down normals. Using Fig. 1, we will then be able to write down the divisor for gk+l on ~r/R. (Recall that the surface has rotational symmetry around the vertical axis of order k + 1.)
Note that rotation around a line L in the plane x3 = 0 and reflection through a plane containing the x3-axis and making an angle of rc/(2(k+ 1)) with the line L are symmetries of the surface (properties 8. and l 1. of Theorem 1). Futher- more, since L is contained in the surface, they must both reverse the orientation of M. It is easy to see that they both fix the two axial points and the two ends. Therefore, the symmetry group o f / ~ / R must contain a subgroup of order 4 fixing 4 points. This forces the lattice L to be rectangular; L={m+itn[m, n~2g}, where t ~ .
We can assume without loss of generality: that one of the fixed points is a lattice point; that this corresponds to the plane end at x 3 = 0 ; and that this plane end has upward-pointing normal. We will denote the lattice point by 0. The other three fixed points must then lie at the half-periods 091 = 1/2, 0~2 = it~2 and co3=~o 1 +(~)2. See Fig. 2. Since reflection in the plane x 3 = 1/2 interchanges

E m b e d d e d m i n i m a l su r faces wi th a n infini te n u m b e r o f e n d s
i t
469
0.) 2 �9 0.13
0 wl 1 Fig. 2. T h e q u o t i e n t t o ru s ~ / { m + i t n I m, n ~ 77}. T h e ha l f -pe r iods arc o0 ~ = 1/2, 0~2 = i 1/2 a n d ~o 3 = o)~ + c~2
the ends and reverses the orientation of the surface, there must be an orientation- reversing symmetry of /~/R which interchanges 0 and the half-period corre- sponding to the other end. This forces the other end to lie at either ~o 1 or e)2- We will take it to lie at e)l, without loss of generality. We now have the planar end with upward-pointing normal at 0, the end with downward normal at ~ , and the axial points at the other two half-periods.
Note that the line L connects the upward-pointing plane end at x 3 = 0 to an axial point also at height x3 =0. Furthermore, L is fixed by rotation around it, and hence the fixed point set of the diffeomorphism of ]~/R induced by this rotation must connect 0 to the half-period corresponding to the axial point. This diffeomorphism can only be reflection through the imaginary axis. There- fore the axial point at height x3---0 corresponds to the half-period (o2=it/2, and reflection through the plane x3 = 1/2 corresponds to reflection through the line Re ~= 1/4. The lines in the plane x 3 = 0 are lifts of the curve Re ~=0.
The axial point at height x3 = 0 must have downward-pointing normal. Sup- pose it had upward-pointing normal. Then there would be a pole of order k at o32. Consideration of the behavior of gk+l along a vertical line Re ~ = c, 0 < c < 1/2, shows that the preimage of the annular region in ]~/R defined by 0 < Re ~ < 1/2 would consist of k + 1 annuli on M. This annular region clearly represents the piece of the surface between the lines which are the lifts of Re ~ = 0 and Re ~ = 1/2. Theorem l, however, states that the intersection of a horizontal plane x 3 = c and the surface is a single closed curve. This is a contradiction. Therefore (~2 has downward-pointing normal.
We now can get the divisor for gk+ 1 on M/R simply by applying the informa- tion in Fig. 1. The end at 0 produces a pole of order k + 2 , the end at o)1 a zero of that order, and the axial points at co 2 and o33 a zero and a pole, respectively, of order k. We will construct a formula for gk+ 1 using the Weier- strass go-function and its derivative ~o'. (See [31] for a description of the ~ - function. Here we normalize the ~a-function by adding a constant so that it always has a double zero at the half-period (o 3. The ~)-function obtained in the usual way as a sum over the lattice points in the plane has instead two simple zeros for non-square tori.) We summarize the relevant divisors in Fig. 3. The equation for gk+l may be easily constructed from these functions:
gk+ 1 (~)= C(~) (~)__ ~9 ((~01)) gS?~ ' (3)
where ~ is in the torus and ce(E is a constant.

470 M. Callahan et al.
Orders of zeros on M/R
0 o) 1 to 1 oJ 3
gk+l --(k+2) k + 2 +k - k ga - 2 0 0 +2 ga - ~o(eo~) - 2 +2 0 0 ~a' - 3 +1 +1 +1
Fig. 3. Divisors on the rectangular torus M/R. Orders of zeros are positive
Orders of zeros on M"
0 (t) 1 O) 2 093
g --(k+2) k + 2 + k - k q 2 k + 2 - 2 0 2k
d ( k k k k
Fig. 4. Divisors of 1-forms o n / ~
Equation (3) gives us a (k+ l)-sheeted branched covering of M/R on which g is well-defined; we will take it to be the surface ~r. The divisor for g and t/ on the covering may be obtained from Fig. l. Further, we observe that the completely regular 1-form d~ on M/R lifts to the covering with zeros of order k at the branch point. We denote this lift also by d(. Figure 4 shows the orders of g, q and d~ at the branch points of )~r. Notice that the 1-form gq has zeros of order k at each branch point. Therefore gq=c'd~ where c' is a complex constant. The value of this constant may be determined by considering that gt/ is the third Weierstrass form divided by 2. Since the plane end, 0, and
0) 2
the axial point, 0)2, are at the same height x3=0, we want R e ~ 2 g q 0) 2 0
= R e S 2c'd(=Re2c'~~ This shows that c' is real. Further, we want the 0 to 1
plane ends to be 1 unit apart. Therefore Re S 2g t /= 1. This forces c '= I. 0
We now have the minimal immersion Mk/T-*~3/'~. It is defined on a (k + l)-sheeted branched covering M of the rectangular torus IE/{m +itnlm, n eZ}, t > 0, punctured at the points 0 and ~o t. This covering is defined by the relation, from (3),
~o [ I~fa'(0 k ~k+~ =(~J(0-~)( 0)~ ~ ,~ - } �9 (4)
The Gauss map is simply
g=c~o (5)

Embedded minimal surfaces with an infinite number of ends 471
where the constant c in the Gauss map is determined by the reflectional symme- try through the plane x3 = 1/2. (The Gauss map on the fixed point set Re ~ = 1/4 of the reflection must be unitary.) The 1-form ~/is defined by the equation
a~ - (6)
g
where d~ is the lift of the completely regular 1-form on the torus. We use the Weierstrass representation in (I) to get the immersion.
At this point we have constructed, using (1), (4), (5), and (6), a possible candidate X for the example Mk of Theorem 1. We now work directly to show that this construction does indeed produce the desired surface, for some choice of t.
Of course, the immersion defined by (1), (4), (5), and (6) may be well-defined only on a covering of M. However, we are able to describe the geometry of the image and show it has, locally, the symmetries of the surfaces of Theorem 1. We can then determine that the mapping X: M ~ ~3/~- has one period which must be killed off.
Consider M/R to be identified with the rectangle in Fig. 2. On the subdomain of M/R which corresponds to { ~ 1 0 < R e ~ < l / 2 , 0 < I m p < t } , the covering M ~ M/R has no branch points. We may lift this simply connected rectangle to M and consider the lift parametrized by ~. We choose a lift of the rectangle such that g is real on the line Im ~=t/2. The Weierstrass 1-forms may be expressed as
(1--g2)q (g- 1 - g ) d ~
@ = i ( 1 - g 2 ) r / = i ( g 1 +g) d~. (7)
2g~/ 2d~
We begin integration in (1) at co 2. It follows from (7) that
X3(0 = 2 Re ~. (8)
In particular, X3 is constant on lifts of the vertical lines R e ~ = z . Also, since g is unitary on Re ~= 1/4, the tangent plane to M is vertical along this plane curve. It is therefore a curve of reflective symmetry.
The metric 22d~ 2 is equal to (g- ~ (1 "3F g2))2 d~ 2 or (g- ~ + g)Zd~2. The horizon- tal curves Im ~ = 0 and Im ~ = t/2 are the fixed point sets of complex conjugation. Since go (~-) = ~3(~) and go'(~-) = ~5'(0, it follows from (3) and the formula for 22d~ 2 that complex conjugation is an isometry in the metric induced by X. Hence the lifts of Im ~ = 0 and Im ~=t/2 are geodesics. A similar argument shows that the lifts of Re ~ = 0 are also geodesics.
F rom the identity
( g k + ' ) ' = ( k + l ) g _' gk+ 1 g
(where we differentiate on M using the lifted parameter () applied to g given by (3), it follows that (since ~ and 8o' are both real on Im ( = 0 and I m ( = t/2) g'/g

472 M. Callahan et al.
i t
(.02 ~ O.J~
0 1 / 4 wl 1
Fig. 5. The fundamental region F projected onto the torus and lines of symmetry. Reflection across any of the lines in this figure lifts to some symmetry of the surface
is real on Im ~ = 0 and Im ( = t/2. Hence the quadratic form (dg).tl---(g'/g)d~ z is real along Im ~ = 0 and Im ~ = t/2. H. Karcher [20] has observed that if (dg).q is real when applied to the tangent vector field of a geodesic, that geodesic is a planar curve of symmetry, and if (dg)-q is imaginary, it is a line. These geodesics are thus planar curves of symmetry. Similarly, along Re ~ = 0 and Re ~ = 1/2, g'/g is imaginary; these corresponds to lines.
Remark 1. Another approach to describing the symmetries of X(M) would be to consider the lifts of the symmetries of M/R to M and then to determine how these symmetries of M act on the Weierstrass forms (7). Such an approach is taken in a similar situation in [14] and [15].
Let F be some lift of the rectangle bounded by 0, 1/4, 1/4+ti/2, and ti/2. The port ion of the surface X(F) is bounded by four curves:
1. a line, l, in the xl x2-plane, emanating from Po =(0, 0, 0)eN~ 2, which corre- sponds to o~20;
2. a planar line of curvature, 70, in a vertical plane, which begins at Po =(0, 0, 0) and ends at a point pl=X(o~2+l/4) in the horizontal symmetry plane x3 = 1/2 and corresponds to co2, m2 + 1/4;
3. a planar line of curvature, 71, beginning at P l and ending at P2 = X(I/4), which lies in the plane x 2 = 1/2 and corresponds to ~o 2 + 1/4, 1/4;
4. and a divergent planar line of curvature 72 in a vertical plane, beginning at P2, which corresponds to 1/4, 0.
See Fig. 5 and Image 5. Note that Po corresponds to ti/2, Pl to 1/4+ti/2 and P2 to 1/4. We will further refer to the end on the surface corresponding to 0 as p~.
Note that the piece of the surface consisting of X(F) plus X(F) rotated around the ray l has boundary consisting of six planar curves of symmetry (7o, 71 and 72 and their rotations around l by re). We will call this piece of the surface S and will refer to it in Section 3. See Image 5.
We wish to compute the angles the edges of /~ make with one another at the vertices Po, Pl, P2 and at the end p~ corresponding to 0. The point Po on M has four copies of F meeting there on each sheet of the (k+ D-fold covering. Hence the angle at Po is ~/(2(k+l)) . The points Pl and P2 are not branch points of the covering, so the angles there are g/2. To compute the angle at the end p~ we could reason in a like manner to see that it is ~/(2(k+ 1)). This also follows from the Gauss-Bonnet formula, using the fact that the total

Embedded minimal surfaces with an infinite number of ends 473
J
Image 5. Top: The basic building block of M2, pictured here for k = 2. In the terminology of Section 1.2, this in X(F). Bottom: The surface S described in Section 1.2. It consists of X(F) above and a copy of X(F) produced by rotating about the line l on X (F)
curvature of F is --n. (The total curvature of M is - -4 n (2 k + 2), while M covers the torus, of which F is one-eight, k + 1 times.) By Gauss-Bonnet , the sum of the interior angles is n; therefore the angle at p~ is n/(2(k+l)), in absolute value.
F r o m this information we can compute the angle between the two vertical planes of symmetry containing ~o and Y2 respectively. It must be the sum of the angles at P0 an 0 in F, namely n/(k + 1).
Knowledge of the immersion of F completely determines the immersion because X(F) may be extended by reflection (in the vertical planes containing 70 and 72 and in the horizontal plane x3 = 1/2 containing ~1) and by rota t ion (around the line l in the plane x3=0) . The immersion will be well-defined on M if and only if there are no periods produced by this process of reflection and rotation. It is evident from the discussion above that this will happen if and only if the vertical plane of symmetry containing the planar curve 72 contains the point P0. This is because Po must be fixed by reflection th rough this plane.
We apply a rigid mot ion to X(F) so that the vertical plane of symmetry containing the planar curve ~2 is the x lx3-plane. See Image 6. Let the

Too ho
c < O Too cold
c O
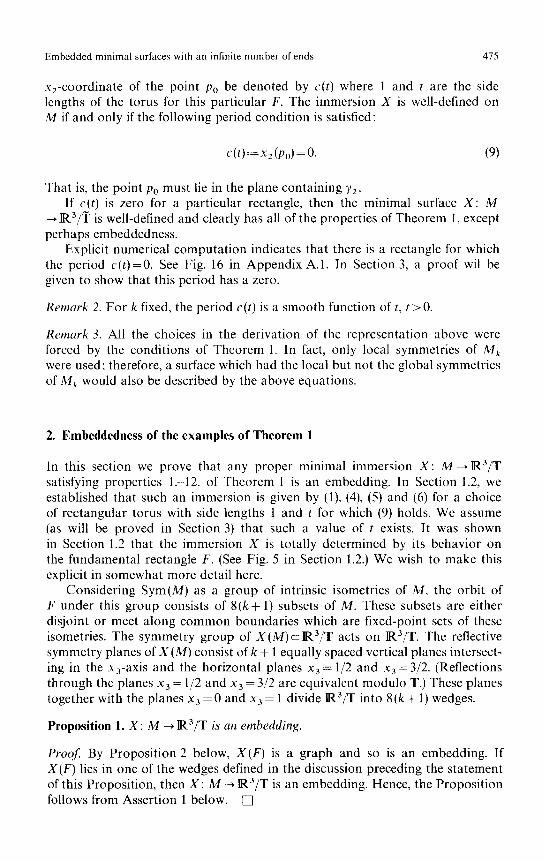
Image 6, The period c(t) for various values of I: how it appears on the surface
.lus( rJghl
Embedded minimal surfaces with an infinite number of ends 475
x2-coordinate of the point Po be denoted by c(t) where 1 and t are the side lengths of the torus for this particular F. The immersion X is well-defined on M if and only if the following period condition is satisfied :
e (t).'= x2 (P0) = 0. (9)
That is, the point Po must lie in the plane containing •2- If c(t) is zero for a particular rectangle, then the minimal surface X: M
IR3/q " is well-defined and clearly has all of the properties of Theorem 1, except perhaps embeddedness.
Explicit numerical computat ion indicates that there is a rectangle for which the period c( t )=0. See Fig. 16 in Appendix A.1. In Section 3, a proof wil be given to show that this period has a zero.
Remark 2. For k fixed, the period c(t) is a smooth function of t, t>0 .
Remark 3. All the choices in the derivation of the representation above were forced by the conditions of Theorem 1. In fact, only local symmetries of M k were used; therefore, a surface which had the local but not the global symmetries of M k would also be described by the above equations.
2. Embeddedness of the examples of Theorem 1
In this section we prove that any proper minimal immersion X: M-- -~3 /T satisfying properties 1. 12. of Theorem 1 is an embedding. In Section 1.2, we established that such an immersion is given by (1), (4), (5) and (6) for a choice of rectangular torus with side lengths 1 and t for which (9) holds. We assume (as will be proved in Section 3) that such a value of t exists. It was shown in Section 1.2 that the immersion X is totally determined by its behavior on the fundamental rectangle F. (See Fig. 5 in Section 1.2.) We wish to make this explicit in somewhat more detail here.
Considering Sym(M) as a group of intrinsic isometries of M, the orbit of F under this group consists of 8 (k+ 1) subsets of M. These subsets are either disjoint or meet along common boundaries which are fixed-point sets of these isometries. The symmetry group of X ( M ) c N3/T acts on IR3/T. The reflective symmetry planes of X(M) consist of k + 1 equally spaced vertical planes intersect- ing in the x3-axis and the horizontal planes x 3 = 1/2 and x3 = 3/2. (Reflections through the planes x3 = 1/2 and x3 = 3/2 are equivalent modulo T.) These planes together with the planes x3 = 0 and x3 = 1 divide ~ 3 / T into 8(k+ 1) wedges.
Proposition 1. X: M ~ n:~3/T is an embedding.
Proof By Proposition 2 below, X(F) is a graph and so is an embedding. If X(F) lies in one of the wedges defined in the discussion preceding the statement of this Proposition, then X: M --, N,3/T is an embedding. Hence, the Proposit ion follows from Assertion 1 below. []
476 M. Callahan et al.
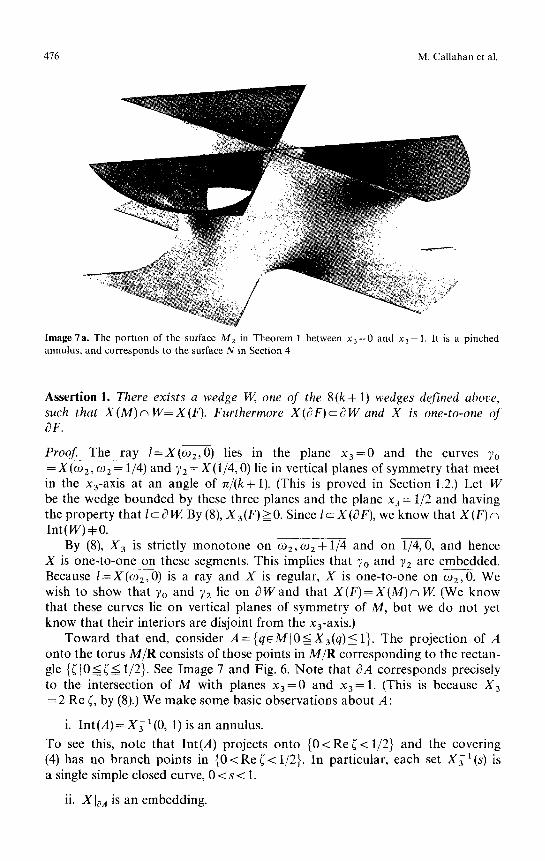
Image 7a. The portion of the surface M 2 in Theorem I between x3=0 and x 3 - 1 . It is a pinched annulus, and corresponds to the surface N in Section 4
Assertion 1. There exists a wedge W, one of the 8(k+ 1) wedges defined above, such that X(M)c~ W - X(F). Furthermore X(t?F)ct?W and X is one-to-one of OF.
Proof. The ray I - X ( c o 2 , 0 ) lies in the plane x 3 = 0 and the curves 70 = X(~o2, co 2 = 1/4) and 72 = X(1/4, 0) lie in vertical planes of symmetry that meet in the xa-axis at an angle of n/(k+l). (This is proved in Section 1.2.) Let W be the wedge bounded by these three planes and the plane x 3 = 1/2 and having the property that l c t? W.. By (8), X3(F)>O. Since lcX(t?F), we know that X(F)c~ Int(W) 4=0.
By (8), X 3 is strictly monotone on ~o2,o92 + 1/4 and on 1/4, 0, and hence X is one-to-one on these segments. This implies that 70 and ~2 are embedded. Because / = X ( ( . o 2 , 0 ) is a ray and X is regular, X is one-to-one on ~o2,0. We wish to show that 70 and 72 lie on ~ W a n d that X(F)=X(M)c~ W. (We know that these curves lie on vertical planes of symmetry of M, but we do not yet know that their interiors are disjoint from the xa-axis. )
Toward that end, consider A = {qe M I0 N X3(q) < 1}. The projection of A onto the torus M/R consists of those points in M/R corresponding to the rectan- gle { ( 1 0 N ( < 1/2}. See Image 7 and Fig. 6. Note that •A corresponds precisely to the intersection of M with planes x 3 = 0 and x 3 = l . (This is because X 3 = 2 Re (, by (8).) We make some basic observations about A:
i. Int(A)=X31(O, 1) is an annulus.
To see this, note that Int(A) projects onto { 0 < R e ( < I / 2 } and the covering (4) has no branch points in { 0 < R e ( < 1/2}. In particular, each set X31(s) is a single simple closed curve, 0 < s < I.
ii. XIoA is an embedding.
Embedded minimal surfaces with an infinite number of ends 477
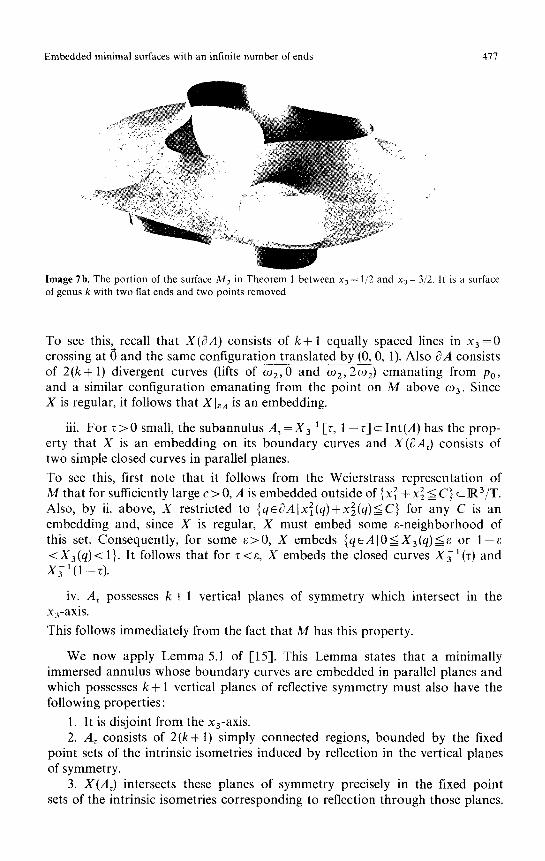
Image 7b. The portion of the surface M2 in Theorem 1 between x3 = 1/2 and x 3 =3/2. It is a surface of genus k with two flat ends and two points removed
To see this, recall that X(OA) consists of k + 1 equally spaced lines in x 3 = 0 crossing at 0 and the same configuration translated by (0, 0, 1). Also ~?A consists of 2 ( k + t ) divergent curves (lifts of c02,0 and ~0z,20~2) emanating from Po, and a similar configuration emanating from the point on M above (~3. Since X is regular, it follows that XIoA is an embedding.
iii. For r > 0 small, the subannulus A~=X31 [r, 1 - - r ] c l n t (A) has the prop- erty that X is an embedding on its boundary curves and X((?A~) consists of two simple closed curves in parallel planes.
To see this, first note that it follows from the Weierstrass representation of M that for sufficiently large c > 0, A is embedded outside of {x~ + x~ < C} c IR3/T. Also, by ii. above, X restricted to {q~(?A[xZ(q)+x~(q)<C} for any C is an embedding and, since X is regular, X must embed some e-neighborhood of this set. Consequently, for some e,>0, X embeds {q~AlO<X3(q)<e, or 1 - c < X 3 ( q ) < 1}. It follows that for r < e , X embeds the closed curves X31(~) and X31 (1 ---c).
iv. At possesses k + 1 vertical planes of symmetry which intersect in the x3-axis.
This follows immediately from the fact that M has this property.
We now apply Lemma 5.1 of [15]. This Lemma states that a minimally immersed annulus whose boundary curves are embedded in parallel planes and which possesses k + 1 vertical planes of reflective symmetry must also have the following properties:
1. It is disjoint from the x3-axis. 2. AT consists of 2 (k+ 1) simply connected regions, bounded by the fixed
point sets of the intrinsic isometrics induced by reflection in the vertical planes of symmetry.
3. X(A~) intersects these planes of symmetry precisely in the fixed point sets of the intrinsic isometries corresponding to reflection through those planes.

478 M. Callahan et al.
i t
N I
I
L I
I l S
0 wl 1 Fig. 6. The fundamental regions F and F and lines of symmetry. The projection of the annulus A is shaded. Thick solid lines lift to curves of symmetry in vertical planes. Dotted lines lift to curves of reflectional symmetry in horizontal planes. Thin solid lines lift to straight lines in horizontal planes
Image 8. The portion of the surface M2 corresponding to X(F w F) in Section 2
In particular, each region is mapped into one particular region of ~,~3/T defined by these k + 1 vertical planes.
4. The fixed point sets of reflection consist of graphs over some interval in the x3-axis.
We may apply this information to X: A ~ I R 3 / T . Let F be the rectangle produced from F by reflection across 1/4, (2) 2 -~ 1/4. See Fig. 6 and Image 8. It is clear that X((F w F)ca A0 is one of the simply connected regions mentioned in statement 2. above. From statement 2. and statement 3., as well as the fact that X 3 >1 /2 on F, it follows that WcaX(AO=X(Fc~A3. From statement 3., it follows that X (z, 1/4) c • W and X (0)2 + z, (J)2 -~ 1/4) c ~ W. Letting ~ ---, 0, we get that WnX(A)=X(FnA)=X(F) and 70w72c(?W. Since X 3 > l on M \ A

Embedded minimal surfaces with an infinite number of ends 479
and X 3 < I on W, we have W n X ( M ) = X ( F ) as desired. (Note that statement 4. gives another p roof of the embeddedness of 7o and ? 1 .)
It remains to prove that 71 is embedded in 0W. Since X 3 = l on 71 and X (F) c W, it follows immediately that 7 ~ c 014/.. We know that reflecting 7 ~ a round the vertical planes of symmetry of M produces a closed plane curve, which we shall call fi, whose total curvature, as a plane curve, is 2 ( k + 1) times the total curvature of Vs. If y~ has a self-intersection, its total curvature must be at least n + n / ( k + l ) . Hence fl has total curvature no less than 2 ( k + 1)n. Since fl is a planar curve of symmetry for M, the Gauss map of M restricted to /3 covers the equator k + 2 times. However, X3 1 (3/2) is another copy of fl trans- lated vertically by (0, 0, 1). Hence the degree of the Gauss map is at least 2 k + 4 . This contradicts the fact that the degree of the Gauss map is 2 k + 2 . Thus, 71 is embedded. [ ]
To prove Proposi t ion 2 we need the following assertion.
Assertion 2. Excluding Po and Po~, the point on NI corresponding to OcF, the only branch points of the Gauss map, g, which lie on X(F) occur on 70vo71. There are three mutually exclusive possibilities:
1. Pl = 7 0 ~ 7 1 is a double branch point; 2. A simple branch point occurs in the interior of 7o ; 3. A simple branch point occurs in the interior of 7~.
Proof. Consider the Gauss map g: M-- , S z as a branched covering. By the Rie- mann-Hurwi tz formula,
z(M) = 2(1 -- genus(/~)) = - 4 k
= (deg g) ;~(S 2) - /~
= 4 k + 4 - - k t ,
where ~t is the total branching order. Consequently, # = 8 k + 4. The Gauss map g has branching of order k - 1 at Po and at the other axial point. It has branching order k + l at P~o and at the other flat end. Therefore, we must have other branch points whose total branching order is 4 k + 4 . If g had a branch point in the interior of X(F), there would be 8 k + 8 more branch points on M, a contradiction. Thus the addit ional branch points of g which lie in X(F) must lie on the boundary and there may be at most one such point.
Suppose neither 7o nor 71 contain a branch point of g. Cont inuing these curves by reflection th rough appropr ia te planes of symmetry produces closed strictly-convex curves on the surface. These curves lie in o r thogona l planes and intersect in two points, one of which is p~. It follows that the Gauss curvature of M at pa is positive, a contradict ion of the fact that the Gaussian curvature on a minimal surface is always nonpositive. Hence the other branch points occur on ?o ~7~.
1. If Pl =7oC~?~ is a branch point, M contains 2 ( k + 1) addit ional branch points, each of order 2, since each is fixed by two reflectional symmetries. There can be no other branch points.

480 M. C a l l a h a n et al.
2. IfTo contains a b ranch point in its interior, then M contains 4 k + 4 simple branch points and 3'1 contains no branch points.
3. The only other possibili ty is that ~,~ contains a b ranch point which is not p~, in which case 3'o contains no branch points. The branch point on y~ cannot be p2=3 ' l ~3'2. If it were, ~ would be convex and Pl could not be a b ranch point. Then 3'o would have to have an inflection point, which would produce too much total branching.
This completes the p roof of the assertion. [ ]
Proposit ion 2. X(F) is a graph.
Proof. As a consequence of Asser t ion 2, I and 3'2 are free of branch points. Since l is a hor izonta l line beginning at Po where g ( p o ) = 0 and cont inuing to the point on the end Poo where g(poo) = oo, we m a y assume without loss of general- ity tha t g: l ~ tEw {oo} is a m o n o t o n e pa ramet r i za t ion of the nonnegat ive real axis. Since the angle at Po in X(F) has been shown in Section 1.2 to be 7r/(2(k + 1)) and g has a b ranch point of order k - 1 at Po, the angle at 0 e ~ w { o o } = S 2 between g(/) and g(7o) is krt/(2(k+l)). Along ~/o, g has at mos t one branch point and is never equal to oo. Since g(Pl) is unitary, g mus t m a p ~o on to
a segment of the form z e2(k + 1), 0 -< z < C1, with C ~ > 1, and g (p t) = e2(k + u Along
71, g is unitary, has a single simple branch point if and only i fg had no branching on 70, and terminates at g(P2)- Since Pz also lies in a vertical plane of symmet ry P m ak ing an angle of ~/(k+ 1) with the vertical p lane of symmet ry conta ining
kir~ irt
Pl, g(Pz) =e2~k+u~k+~- Since the degree of g is equal to 2 k + 2 on A4, g(3'2) krc rc
must be an arc of the form e ~~ 01<0<2(k+1~+ ~ ~ , ~ , . with 0~>0 . Since 3'2 / k~ rc \
is a p lanar curve of symmet ry lying in P, g(Y2) must lie on the ray ~ r ~ R . Since g(P2) lies on the unit circle, g is never vertical on Y2 and g has
/ k~ ~ \ .~ , ~ - ~ . . ~ + i ~ + ~ ) no branch points on 72, it follows that .!~ %v21- ~ ~ ]Z > 1 }. See Fig. 7.
The set g(X(OF)) divides S 2 = ~ t u { o o } into two regions, one of which has area equal to g, the o ther area equal to 3~. Since the total curvature of X(F) is - r t and g is an open mapping , it follows that g(X(F)) is equal to the region of S 2 with area equal to 7t and that g is a d i f feomorphism on the interior of F. Moreover , as in evident f rom Fig. 7, g(X(F)) lies in a closed hemisphere touching the b o u n d a r y only at the nor th and south poles, cor responding to 0 and oo. In fact, g(X(F\{po, p~})) lies in an open hemisphere (since g assumes the values 0 and oo at the point Po and the end Po~). Consider the plane conta ining the x3-axis and parallel to the great circle on S z consist ing of the real axis. This intersects g(X(F\{po, Poo})) along the positive real axis. Ro ta te this plane by a small angle a r o u n d the x3-axis to p roduce a plane P which defines a hemisphere in S 2 conta in ing the entire image g(X(F\{p o, p~})). The project ion X(F\{po}) --* P is then a submersion.

Embedded minimal surfaces with an infinite number of ends 481
g(P2 )
! /
g (P0 )
Fig. 7. The image of gF under the Gauss map g
To show that X(F) is a graph over P, it remains only to show that the boundary of X(F) projects one-to-one onto this plane.
It is obvious that the projection of l cannot intersect the projections of 70, 7t or 72 because 1 lies in the plane x 3 = 0 and x 3 > 0 for all points on the other three curves (except P0, which is on both I and 7o)- Similarly, the projection of ~'1 cannot intersect the projections of the other three curves. The only remain- ing case to check is the intersection of the projections of 7o and 72- However, note that the two vertical faces of the wedge W, in which X(F) lies, project onto the plane P with no overlap except at their common edge on the x3-axis. Since 70 and ~2 lie in these two vertical faces and do not cross the x3-axis, their projections cannot intersect.
This shows that X(F) is a graph, and completes the proof of Proposi- tion 2. []
3. Conjugate surface construction
In this section we show that the period problem posed in Section 1.2 may be solved; there exists a t > 0 for which c ( t )=0 in (9). In doing so, we also give an alternate proof of the existence of the surfaces of Theorem 1 by means of conjugate surfaces. We will construct a minimal disk whose conjugate surface is a fundamental region of M k. The method is independent of Section 1, except for one gap which will be explained in Remark 6 below.
3.1. Conjugate minimal surfaces
The coordinate functions on a minimal surface M are harmonic. The surface defined by the conjugate harmonic functions, which exist at least locally on M, is called the conjugate surface and we will denote it by M*. (For details see [213 or [26].) in terms of the Weierstrass representation of M, (1), one
can produce M* simply by multiplying the integrand by ~ - i . Thus the Gauss maps of M and M* coincide and the surfaces are isometric, but not, in general, congruent. Obviously M * * = - - M . Furthermore, a planar line of curvature of

482 M. Cal lahan et al.
M becomes a straight line on M* and vice versa. From the Schwarz Reflection Principle, it follows that reflectional symmetries of M through planes correspond to reflections of M* across lines. Also, if M is a piece of a minimal surface bounded by planar lines of curvature, then its conjugate surface is bounded by straight lines. If M contains an interior line segment around which it rotates into itself, then M* will reflect into itself through the plane of the corresponding geodesic line of curvture.
If M is a minimal surface bounded by planar lines of curvature, it is possible to determine explicitly the polygonal boundary of M*. In particular, straight lines in M* are orthogonal to the planes of their line-of-curvature counterparts on M. In the most famous example, M = catenoid, M * = helicoid, this construc- tion is easily understood and is explained in [22].
It will be important in our subsequent discussion to understand the relation between a curve 7 c M and its counterpart ~* on the conjugate surface M*.
Since the Weierstrass forms of M* are those of M multiplied by ] / - - 1, it follows that the tangent vectors to 7* are produced by rotating the tangent vectors to 7 counterclockwise by re/2 radians around the normal vector at corresponding points. If I c M is a straight line, its tangent vector is constant. It follows that the tangent vector field to the planar geodesic I * c M * , and hence l* itse
Embedded minimal surfaces with an infinite number of ends 483
I
Image 9. The surface S c M2, for k = 2, paired with its conjugate surface, as described in Section 3
and planes of symmetry computed in Section 1.2 shows that the boundary to the conjugate surface is as drawn in Fig. 8. (The placement of the boundary relative to the coordinate axes, as shown in the figure, is determined later in the text.)
Lemma !. The disk-type minimal surface S* spanning F has the following proper- ties:
1. S* is symmetric with respect to the vertical plane of symmetry of F; 2. The total curvature of S* is - 2 ~ ;
484 M. C a l l a h a n et al.
3. S* lies in the convex hull of F; 4. S* is asymptotic to the plane spanned by the two rays of F.
See Images 9 and 10.
Proof Property 1. is immediate from the construction of S*. The total curvature of M/T is - 4 n ( 2 k + 2) and M/T is made up of 2 (2k+2)
pieces congruent to S. Therefore the total curvature of S is - 2 n and the same is true of S*, since they are isometric. This is property 2.
Let CR be the solid cylinder of radius R centered on the x3-axis, and C?CR be its boundary. Since S* has a vertical normal vector at Po and at the point at infinity, and since S* is properly immersed, elementary analysis will show that the intersection of S* with CR must be a curve very close to a circular arc that begins on one of the rays, winds around an integer number of times n and ends on the other ray. Therefore, it has total curvature very close to 2nn+n/(k+l). Since S* becomes flat on the end, the geodesic curvature of this almost circular arc must be very close to 2nn+n/(k+ 1). Appending this curve to the part of •S* inside the cylinder produces a closed curve whose geodesic curvature is approximately (4+ 2n)n. By the Gauss-Bonnet Formula, the portion of S* inside the cylinder must have total curvature close to - 2 n ( n + 1). Since we know the total curvature of S* is - 2 n , it follows that n=0 . Therefore the intersection S*~OCR consists of an arc that is very close to a circular arc of n/(k+ 1) radians connecting the points where the rays on F intersect CR. By the convex hull property, S*c~ CR lies in the convex hull of c?(S* c~ CR). Hence S* lies in the convex hull of its boundary. We have also shown that it is asymptotic to the plane spanned by its two half-line bound- aries. []
We now wish to reverse the process. If D is a minimal disk spanning F and satisfying the conditions of Lemma 1, its conjugate surface is rotationally symmetric about a ray. Either one of the symmetric halves defines a minimal surface with all the properties possessed by X(F) in Section 1.2. Therefore, it corresponds to a basic piece of one of the surfaces constructed in Section 1.2. That is, D * = S for a minimal surface S defined in Section 1.2 and associated with some rectangular torus with side lenghts 1 and t. In particular, we may define the period c(t) of S = D* as in (9). If it is equal to zero, we have constructed an immersed minimal surface with properties 1.-12. of Theorem 1. The embed- dedness of this example follows from the results of Section 2.
Remark 4. At this point we do not know that D is the unique minimal disk spanning F and satisfying the properties of Lemma 1. However, we do know that for any such disk D, there is a value of t for which D*=S=S(t). (This follows from Remark 3.)
As a consequence of the definition of c(t) in (9) and equation (10) above, the period c may be computed directly from knowledge of the behavior of the Gauss map of D on c~D = F.
We will now prove that the construction outlined in the previous paragraph may be carried out. To begin, we normalize F by scaling so that the line segments

Embedded minimal surfaces with an infinite number of ends 485
X -
A
Pl ~ P0
~2
• Fig. 8. The polygonal boundary Fb
meeting at Po have unit length. Since k is fixed in this discussion, the angle O=n/(k+ 1) at Po is also fixed, so the rescaled F is completely determined by the length b of p~ Pz. Let lo, l~ and l 2 refer, respectively, to the line segments PoP1 and pt P2 and the ray emanating from P2- Note that 71=l*. We label the rescaled boundary curve F e. See Fig. 8.
Proposition 3. There exists a value of b for which the period, defined above, van- ishes. The conjugate surface S = D * extends by reflection to a minimal surJace satisfying all the conditions of Theorem 1.
The proof will proceed as follows. We establish first, in Lemma 2, that every Fh, b > 0 , is spanned by some minimal disk D b satisfying all the conditions of Lemma 1. Therefore, it makes sense to speak of c* (b), as a multivalued function. (Note that c*(b) is different from the function c(t).) In Lemma 3 we show that D b converges, as b--* 0, to a planar region and describe the limiting behavior of the Gauss map of D b on (?D b = F b. Lemmas 4 and 5 are needed to establish Lemma 6, which allows us to estimate the twisting of the Gauss map on ~Db = Fb for large b. After properly orienting the F b we use Lemma 3 to show that c* (b) > 0 for b small, and then use Lemma 6 to establish that c*(b)<0 for b large. A continuity argument is then given to prove the existence of a b with Oec*(b).
This argument is carried out explicitly after Lemma 6, and may be read now assuming Lemmas 2, 3 and 6.
Lemma 2. Every Fb is spanned by a minimal disk D b satisfying the conditions of Lemma 1.
Proof To prove the existence of D b we begin by fixing b and converting F b to a finite contour, Ft, in the following manner. For t>0 , truncate the rays at length t and connect their endpoints by a circular arc in the plane spanned by the rays. Then approximate F, by a sequence {F,.i} of smooth extremal curves
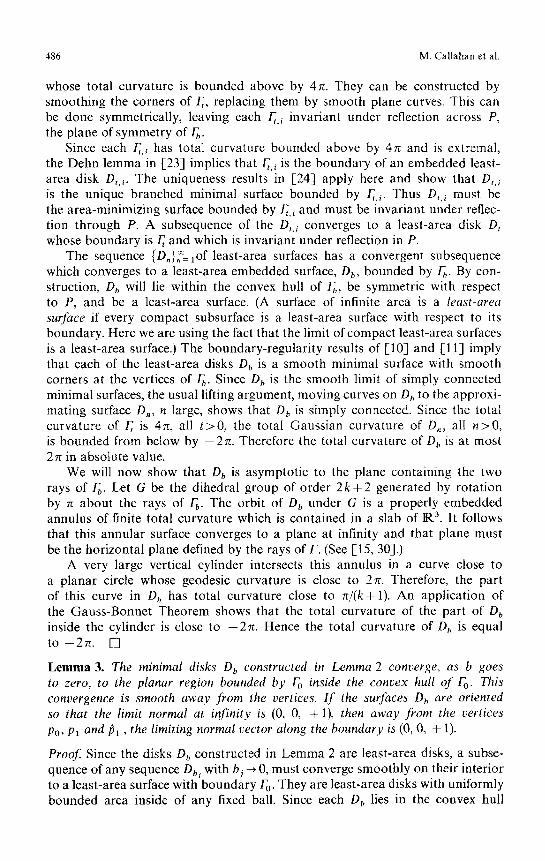
486 M. Callahan et al.
whose total curvature is bounded above by 4n. They can be constructed by smoothing the corners of F t, replacing them by smooth plane curves. This can be done symmetrically, leaving each F~. i invariant under reflection across P, the plane of symmetry of Fb.
Since each F~. i has total curvature bounded above by 4n and is extremal, the Dehn lemma in [23] implies that Ft,i is the boundary of an embedded least- area disk Dt,i. The uniqueness results in [24] apply here and show that Dt.i is the unique branched minimal surface bounded by F,.i. Thus D,.g must be the area-minimizing surface bounded by F~,~ and must be invariant under reflec- tion through P. A subsequence of the Dt,~ converges to a least-area disk D, whose boundary is F t and which is invariant under reflection in P.
The sequence {D,},% 1of least-area surfaces has a convergent subsequence which converges to a least-area embedded surface, Db, bounded by Fb. By con- struction, Db will lie within the convex hull of Fh, be symmetric with respect to P, and be a least-area surface. (A surface of infinite area is a least-area surface if every compact subsurface is a least-area surface with respect to its boundary. Here we are using the fact that the limit of compact least-area surfaces is a least-area surface.) The boundary-regulari ty results of [10] and [11] imply that each of the least-area disks Db is a smooth minimal surface with smooth corners at the vertices of Fb. Since D b is the smooth limit of simply connected minimal surfaces, the usual lifting argument, moving curves on D b to the approxi- mating surface D,, n large, shows that Db is simply connected. Since the total curvature of F~ is 4n, all t > 0 , the total Gaussian curvature of D,, all n > 0 , is bounded from below by -2re . Therefore the total curvature of Dh is at most 2n in absolute value.
We will now show that Db is asymptotic to the plane containing the two rays of Fb. Let G be the dihedral group of order 2 k + 2 generated by rotation by n about the rays of Fb. The orbit of Db under G is a properly embedded annulus of finite total curvature which is contained in a slab of IR 3. It follows that this annular surface converges to a plane at infinity and that plane must be the horizontal plane defined by the rays of F. (See [15, 30].)
A very large vertical cylinder intersects this annulus in a curve close to a planar circle whose geodesic curvature is close to 2n. Therefore, the part of this curve in D b has total curvature close to n/(k+l) . An application of the Gauss-Bonnet Theorem shows that the total curvature of the part of D b inside the cylinder is close to - 2 n . Hence the total curvature of D b is equal to - 2 ~ . []
Lemma 3. The minimal disks D b constructed in Lemma 2 converge, as b goes to zero, to the planar region bounded by Fo inside the convex hull of Fo. This convergence is smooth away from the vertices. I f the surfaces Dh are oriented so that the limit normal at infinity is (0, 0, + 1), then away from the vertices Po, Pl and Pl , the limiting normal vector along the boundary is (0, 0, + l).
Proof Since the disks Db constructed in Lemma 2 are least-area disks, a subse- quence of any sequence Db~ with b j - , 0, must converge smoothly on their interior to a least-area surface with boundary F o. They are least-area disks with uniformly bounded area inside of any fixed ball. Since each Db lies in the convex hull

Embedded minimal surfaces with an infinite munber of ends 487
' r a
a
e
Image 10. The minimal disks D b bounded by Fh for various values of b. These are conjugate to the surfaces S c M2, for the t-family with k = 2
of Fb, the limit surface lies in the convex hull of F o. It follows that the limit surface is the p lanar region in the convex hull of Fo bounded by F o. Since the area in fixed balls is uniformly bounded, the p roo f of Hi ldebrandt ' s b o u n d a r y regularity theorem [1 l] shows that this convergence is smoo th on the b o u n d a r y except perhaps at the limits of the vertices Pt,/~a, P.
The normal to the p lanar domain Do is either (0, 0, 1) or (0, 0, - 1 ) . Since on each D b the normal approaches (0, 0, 1) as one diverges a long a ray in 8Db=Fb, it follows that, away f rom the vertices, the limiting normal value is (0,0,1). [ ]
Remark 5. We observe that if D b is oriented as in L e m m a 3, the normal to Db at P0 is (0, 0, --1) for all b. To see this, note that near Po, Db must be a graph over a subset of the region determined be the acute angle 0 at Po. Therefore, the tangent vector to 7 = Db r P at Po is in the direction of the bisector

488 M. C a l l a h a n et al.
of this angle. Since 7 diverges on D b, the curvature of ), is an odd multiple of ~. Since 7 is a planar geodesic, the limiting normal to Db on '/ must be opposite that of the normal at P0.
Lemma 4. The intersection of Db with any horizontal plane x 3 = r , 0 < r < b is a single simple curve.
Proof The set S = D b n { x 3 = T } is a compact semianalytic subset of Dh with exactly two boundary points contained in 0Db. By the maximum principle for minimal surfaces, every component of S is one-dimensional. (See [28] for a discussion of the maximum principle.) If S is not a single curve connecting its boundary points, then some component of D \ S is a disk whose closure el in Db is compact. (See [23].) Since 0A is contained in a plane, A must be flat. This is impossible. []
Place F b so that the rays lie in the x 1 x2-plane, their extensions meet at 0, and F b c { x 3 > 0 }. Rotate F b around the x3-axis so that one of the rays lies in the positive xl-axis and the other lies in the first quadrant. (See Fig. 8.) Observe that this forces a vertex of Fb to lie at (1, 0, 0).
Lemma 5. There exists an R c > 0 such that the half-cylinder
C = {(x,, x2, x3)lx 2 + x 2 = R 2, x 3 ~ Rc} (11)
is disjoint from every D b.
Proof We will prove the lemma for R c = 103. We construct a barrier surface for the family Db, b > 0. Consider the rectangle
fll whose vertices are (3, 0, 1), (100, 0, 1), (3, 0, 1000) and (100, 0, 1000). Let 1~2 be the reflection of/31 in the vertical symmetry plane P of Fh. Note that fll w fl2 bounds an annulus /1 consisting of the boundary of the convex hull of fil wfi2 from which the planar disks B1 and B2 bounded by fll and f12 have been removed. A direct calculation shows that
Area (B0 + Area(B2) > Area (~]).
In particular the least-area disks which span /31 and /32 do not comprise the surface of least area with boundary equal to /31wfi2. A theorem of Douglas [6, 7] states that if there is an annulus whose area is less than the sum of the area of the least area disks bounded by /31 and /32, then there exists an annulus of least area whose boundary is /31w/32. We will call this annulus A.
We now show that A and all of its vertical translates At= A +(0, 0, t), t >0 , are disjoint from Db. Observe that since Dh is contained below x3=b, At is disjoint from Db for t > b. If any At intersects Dh, then by the maximum principle there is some largest t such that A t intersects Db, and this first intersection occurs on the boundary of At or of Db. However, 0Db=Fb cannot intersect At for any t because it does not intersect the convex hull of the two rectangles forming the boundary of At. Furthermore, OAt lies in the boundary planes of the convex hull of Fb. By the convex hull property, D b can only meet the boundary

Embedded minimal surfaces with an infinite number of ends
x 2
x 1 P0
P
Fig. 9. Projection of rotated Fh on to Xl x2-plane
489
of its convex hull on ~?Db. Therefore it follows that OAt c~ Db=O. This contradic- tion shows that At c~ D b = 0 for all t > 0.
We can now show that C n D b is empty. If b<Rc , there is nothing to prove. Suppose b>Rc . By L e m m a 4, 7h=Db~{X3=h} is a single simple closed curve for 0 < h < b. If h > Rc, 7h is blocked by the collection of upward vertical transla- tions of A from intersecting C. It follows that C ca D b is empty. [ ]
We now estimate the twisting of the normal vector to D b on one of the vertical lines of length b on Fb. This line may be parametr ized by arc length t, O<t<b, with t = 0 corresponding to the vertex P2 in the plane {x3=0}. Define O(t) to be the unoriented angle between the normal to D b at the point correspond- ing to t and the symmetry plane P.
Lemma 6. Given e > 0 , there exist positive constants cl, c2 such that fi~r all b sufficiently large, the unoriented angle O(t) satisfies O(t)< ~ for re(c1, b-c2) .
Proof. For convenience we rotate D b around the x3-axis so that the positive xl-axis bisects the rays in Fb. See Fig. 9. Observe that this has no effect on O(t). We take D~, to be the par t of D b with x3".>Rc, where Rc is the constant from L e m m a 5. L e m m a 5 implies that D~, lies inside the half-cylinder C.
Let K be a compac t stable catenoid with reflectional symmetry th rough its waist plane whose radius RK is large enough to ensure that the angle between the normal vector to K and the waist is less than e.. Fur thermore, choose such a catenoid K whose bounda ry circles lie in planes more than 2 R c apart.
We now use K to show that O(t)<e for t ~ ( R c + R K, b--RK). (We assume b~>Rc+2RK. ) Place K so that its waist plane lies in the x 1 x3-plane and its axis of symmetry intersects the xl x3-plane at (Rc+RK+ 100, t), where te(R c + RK, b -RK) . Since K is outside the half-cylinder C, K c~ D; is empty. Translate K in the negative xl-direction. It is clear that some translate of K must intersect D~,. By the max imum principle, the first intersection of K and D~, must occur on 0K or ~?D;. However, 0K can never intersect D; since OK never enters the half-cylinder C. Therefore the first intersection occurs on ~D; ; in fact, it

490 M. Callahan et al.
XI
X2 Fig. 10. Projection of Fb onto the xl x2-plane
must occur on one of the vertical line segments in c?D'b. (This is because the other components of 0D~, occur in the planes x3 = Rc and x3 = b, but the intersec- tion of the interior of K with these planes is empty for all K and all values of t.) By assumption, the normal vector to K at the point in the intersection makes an angle of less than e with the Xl xa-plane. Elementary consideration shows that the normal vector to D~, at the intersection point must make a smaller angle with the x~ x3-plane; i.e., O(t)< ~.
We therefore choose cl =Rc+RK and c2=RK to make the lemma true. []
We can now complete the proof of Proposition 3.
Proof of Proposition 3. As observed after the statement of Proposition 3, we may associate to each b > 0 the values of the periods c*(b) defined in (9) in Section 1.2. (There will be only one value of c* (b) if the minimal disk spanning F b in Lemma 2 is unique.) The proposition will follow from the results of Sec- tion 1.2 once we establish the existence of a value of b for which 0~c* (b).
Rotate Fb by ~/2 clockwise from its position in Fig. 8. Looking down the x3-axis, Fb will appear as in Fig. 10. Orient the minimal disk Db so that the

Embedded minimal surfaces with an infinite number of ends 491
PJ / ~ I Po
X1
Pz
- - X 2
Fig. I 1. Orientation of Db and F b
limiting normal vector on the end asymptotic to x 3 = 0 is (0, 0, 1). This induces an orientation on F b indicated by arrows in Fig. 11.
We may compute the conjugate boundary F~* = (?O~ by using (10). We choose to integrate from P2. Integrating along the ray 12, we must get a curve lying above the xl-axis. Since the normal is close to (0, 0, 1) as one moves far away from P2, it follows that the projection of this conjugate boundary (72 = l*) covers the nonnegative xt-axis. (We mention that 72 in fact does not cover any of the negative xl-axis. This is a consequence of Assertion 2 in Section 2 where it is shown that the Gauss map has no branch points on 72-)
Note that because 7z lies in the x~ x3-plane, D* is positioned exactly as in the definition of the period in (9).
I. c* (b) > 0 for b small
We compute c*=x2(Po) by integrating along /~ and /o, assuming that b is small. Since the length of 11 is b, the contribution to the integral along t t can be at most b in absolute value. As a consequence of Lemma 3, the normal to D b along l o is very close to (0, 0, 1) away from Po and Pl. Given our choice of orientation, l*' is very close to - ( c o s 0, sin 0, 0). Hence, since we are beginning integration along lo at Pl (i.e., we are integrating opposite to the orientation), Xz(Po ) is very close to sin 0, for b small. In particular, c*(b)>0 for b small.
2. c* (b) < 0 for b large

492 M. C a l l a h a n et al.
Parametrize l~ and 1o by arc length so that 11(0)=pl and lo(0)=po. Note that this parametrization agrees with the orientation of Fb. The value of Po is given, from (10), by
0 0
po=Rl ~ ~,(s)ds+R o ~ ~o(s)ds (12) b 1
where gl(s) and go(S) are the normal vectors to D b along 11 and lo respec- tively, and R 1 and R o are clockwise rotation by g/2 around the oriented lines I~ and lo respectively. The second integral is bounded in absolute value by 1. We use Lemma 6 to estimate the second coordinate of the first integral.
Choosing e > 0 very small and assuming b large, we can apply Lemma 6 to find constants cl and c2, independent of b, such that ~l(s) makes an angle of less than e with the reflection plane of symmetry of Fh, for se(c2, b--c~). This plane makes an angle of 8/2 with the negative xz-axis; from this fact and the convex hull property it follows that g~(s) has the form (cos ~b, sin 4~, 0) with 3~/2+ 0 / 2 - ~ < q~< 3~/2+ 0/2+~ along se(c2, b-cO. Therefore, the first integral in (12) breaks into three parts:
0 b -ca c2 0
R, f el(s)=R 1 ~ g,(s)ds+Rl I ea(s)ds+R, i rll(S)ds" b b b - c 1 c2
The first and third of these integrals are bounded in absolute value by Ca and c2, respectively. The second is very close to
- (b - c I - c2)" R 1 (cos (3 ~/2 + 0/2), sin (3 ~/2 + 0/2), 0)
which equals - ( b - c1 - c2)" (cos(8/2), sin(8/2), 0) (since R1 corresponds to clockwise rotation by 8/2 around the negative x3-axis).
It follows that, for b sufficiently large, the integral in (12) is dominated by the term - ( b - c l - c2)-(cos(0/2), sin(0/2), 0), since the other terms are all bounded. Therefore, for b sufficiently large the contribution - b sin(0/2) to the x2-coordinate of Po dominates the other terms, and, hence, x2 (Po)< 0. Therefore c* (b) < 0.
Note that we have actually proved that c*(b)~sin 0 as b-~0 and c*(b)/ ( - b sin(0/2)) ~ 1 as b ~ ~ . See Fig. 12 for a graph of c*(b) for k = 1.
We have now shown that c*(b)>0 for b small and c*(b)<0 for b large. Choose b + small such that c*(b+)>0 and b- large such that c*(b- )<0 . By Remark 4, there exist values of t, t + and t - respectively, such that the disks Dg'+ and D*- correspond to a generating piece of the surface defined by the equations in Section 1.2 on the rectangular torus with side lengths l and t. Therefore, c ( t+ )>0 and c ( t - ) < 0 . Since c(t) is continuous (Remark 2), there exists a t o such that C(to)=0. Taking b to be the ratio of the lengths of 71 and 70 on S=S(t) for this torus, it follows that O~c*(b). []

Embedded minimal surfaces with an infinite number of ends 493
- 4
~7
Fig. 12. The period c*(b) for k = 1. The graph approaches sin 0=1 for b small and is asymptotic
to a line with slope - s i n ( 0 / 2 ) = - 1 / ~ for b large. This corresponds to the behavior of Dh for b large; see the text
Remark 6. The last part of the above proof is made slightly more complicated by the fact that we have not proved that for every b > 0 there is a unique minimal disk satisfying the properties of Lemma 1 and spanning F b, much less that these disks vary smoothly with b. However, this can be proved by establish- ing that the function b(t) giving the height of /" corresponding to any rectangular torus as defined in Section 1.2 is one-to-one. (This argument uses the fact that the Jacobi field generated by variation of the surfaces S* in the t-family defined in Section 1.2, for a critical value of t for b(t), would be zero on 0S* and would go to zero on the infinite part of S*. From this one derives a contradiction.) Since Remark 4 states that b(t) is onto, it follows that b(t) is a diffeomorphism. Since c and Db vary smoothly with t, they must then vary smoothly with b. This is confirmed by the computat ion illustrated in Figure 12.
4. Construction via the limit of compact annuli
In this section we will give an abstract construction of the surfaces M k of Theo- rem 1. Fix the integer k > 1. Let X be the set of k + l line segments in the plane x3--0 which meet at equal angles at 0, extend to the unit circle, and are situated so that the xl-axis bisects one of the angles. Let ,9 ~ be the union of k + 1 arcs on the unit circle linking the end-points of X; specifically,
X= rcosO, rsinO, O)]O=~ m+ ,[rl<l,O<m<k
o ~9 ~ = {(cos 0, sin 0, )1
< 2 m + ,O<_m<_k = k + l
See Fig. 13. Denote by W a smoothing of X u ~ obtained by rounding off the corners of Xu~9 ~ inside a small neighborhood of X c~2, ~. Furthermore,

494 M. C a l l a h a n et al.
x
Fig. 13. The set X u S for k = 2
- x l
choose Wsuch that Sym(W)= Sym(X • St). For positive t, let W t be the vertical translation of W to the plane x 3 = t . Let So be a small circle in the xl x2-plane centered (�89 0, 0) which is disjoint from Wand has radius less than I/4. Finally, let St its vertical translation to the plane x3 = t, t > 0.
For small values of t, So t3 St is the boundary of a stable catenoid Ct which is disjoint from W. It follows from Theorem 1.2 in [18] that Wu Wt forms the boundary of a minimal annulus, At, which is regular and embedded, except perhaps at the singular points 6 and (0, 0, t) of Wu W t and has the following properties: Sym(At)=Sym(Ww Wt) and At nCt#:O. (Actually Theorem 1.2 of [18] applies to the case where the boundary is nonsingular. However, by taking limiting nonsingular approximations of Wu Wt, the statements above follow. In fact, this argument is carried through in a similar case in Section 2 of [18].)
Each surface A t may be extended by reflection across any straight line seg- ment in X c~OA t to obtain a surface ~ whose area is twice that of A t and which is smooth along the interior of the straight line segment. Since, Sym(At) =Sym(WuW0, A t possesses a rotational symmetry of order k + l . It follows that the same Nt is obtained regardless of the line segment in X c~ OAt chosen. From this we conclude that near the origin 6, N, is an embedded minimal surface, smooth except possibly at 6. However, since an open minimal surface cannot have an isolated singularity, Nt is a smooth embedded minimal surface near 0. A similar argument shows that the singular point (0, 0, t ) e A t is the interior point of a larger minimal surface which contains At. It follows that the Gaussian curvature function K: A t ~ ( - - ~ , 0] is continuous on At and has a minimal value kt at some point Pt.
Let V be the vertical plane containing the x3-axis and making an angle 7t
of 7 ~ - , with the xl-axis. Reflection through Vis a symmetry of At whose fixed K + t

Embedded minimal surfaces with an infinite number of ends 495
point set includes an arc ~ with end points 0 and (0, 0, t). The Gauss map of A, must be vertical at the end points. Since At is embedded, e, cannot cross the x3-axis and therefore the normal to c~, in V which is the normal to A, along et must take on ant ipodal values at the endpoints 0 and (0, 0, t). By Lemma 5.1 of [15], c~, is a graph over the interval [0, t] of the x3-axis. (This lemma has been used in Section 2 where it is stated in the p roof of Assert ion 1. It will be referred to several times in this Section.) Therefore, as t ~ 0 the maximal curvature of c~ t must become unbounded. But c~, is a principal curvature line on At and therefore the minimal Gauss curvature k, of A, must tend to - as t ~ 0 .
We produce a new family of surfaces M, by homothet ical ly expanding A,
by ]~kt] making the min imum value equal to - 1 and translating so that the point of min imum Gaussian curvature is at the origin. On the surface M~, the curve corresponding to c~, has curvature bounded by - 1 and still has the proper- ty that its normals at the end points are ant ipodal points on a great circle. It follows easily that the distance between the endpoints is at least 2. Hence, the distance between the b o u n d a r y curves of Mt is bounded below by 2.
The isoperimetric inequality shows that there is a uniform upper bound on the area of the surfaces A,. This upper bound on the area and the mono ton i - city formula for minimal surfaces with boundary [1] imply that there is a local area bound, on compact balls in ~3 , for the family {M,}. Because the curvature is also bounded, there must exist a sequence M~,, tl ~ 0 of surfaces which con- verge uniformly, on compact subsets of I /3, to a properly immersed minimal surface M which is embedded except perhaps at the singular points of its bound- ary. Note first that M must have finite total curvature, since it is the limit of surfaces of uni formly-bounded total curvature. The bounda ry of M has 2 or fewer components , since ~?Mt, has two components . Fur thermore , since [k,,]
oo as i --* oo, OM has one of the following forms.
�9 two sets of k + 1 coplanar straight lines, in parallel planes, which intersect in equal angles and one of which is a vertical translate of the other, �9 two parallel straight lines which are vertical translates of one another, �9 one set of k + 1 coplanar straight lines meeting in equal angles, �9 one straight line, �9 no boundary .
Remark 7. For the first two cases, kt, blows up as quickly as tl goes to zero. In the next two cases, kt, blows up more quickly than t~ approaches zero and p,, approaches the bounda ry of At, as quickly as t~ goes to zero. In the last case, kt, blows up more quickly than tz goes to zero or Pt, approaches the bound- ary.
We will now show that only the first case is possible. This is done by showing that the first four cases lead to contradictions. The reader may wish to assume for the momen t that this is the case and skip the proof.
Assertion 3. The boundary of M consists of two sets of k+ 1 coplanar straight lines as described in the first case above.
Proof We eliminate the four other cases.

496 M. Callahan et al.
x 3
x 1
Fig. 14. D and Z
Case I : • M empty Suppose that M has empty boundary. The Strong Halfspace Theorem in [17] states that two properly immersed connected minimal surfaces in N 3 which do not intersect must be parallel planes. It follows from this that M must be connected. Since M is the smooth limit of annuli, a simple curve lifting argument (see, for example, the proof of Assertion 2 in Theorem 2.2 in [18]) shows that the fundamental group of M is cyclic or null. The only complete embedded simply-connected minimal surface of finite total curvature is the plane. However, M has curvature - 1 at the origin. Therefore, M is a complete embedded minimal annulus of finite total curvature, and by the results of Osserman [25, 26] and Jorge-Meeks [19], M must be the catenoid. We now show that this is impossible.
The point 0 on the catenoid M, where the Gaussian curvature is minimized, must be a point on the waist-circle of M. Orient the catenoid M by the outward pointing normal T. Let e > 0 and choose 6 < 0 , depending on e, so that (T(x), (0, 0, 1 ) ) > 1 - ~ / 2 for all points x in the circle P~c~ M where P~ is the plane x3=6. Choose i large enough so that (,T(x), (0, 0, I ) ) > I - E for points x on the curve P ~ Mr,. Let Mr, be the subannulus of Mti with boundary equal to the union of P~ n Mt, and the singular boundary curve of Mt, with negative x3-coordinate. Next translate 1~, so that the singular boundary point of the translated surface is at the origin 0. Then homothetically contract this translated surface so as to obtain a surface Ri,~ whose nonsingular boundary curve 7i.~. is contained in the plane x3 = 1. Since the third coordinate of the singular bound- ary curve of /~t, goes to - o o as i---, 0% the diameter of 7~,~ goes to zero as i--~ o0.
Note that for every e > 0 we can assume i is large enough so that R~,~ satisfies:
1. 0R~,~ is contained in the union of O={x[x~+x2<l, x 3 = l } and Z = {r.xlr>O, xe,9~ See Fig. 14.

Embedded minimal surfaces with an infinite number of ends 497
2. The normal vector T t o Ri, ~ along the curve 7i,~=D r satisfies (T(x) , (0, 0, 1)) > 1 --e,.
Let C be a compact catenoid whose boundary circles are contained in the planes Po = {x3 =0} and P~ = {x3 = 1 }, and such that C is disjoint from all vertical translates of D and Z. We now show that R~,~r Consider the family C , = { t . x l x ~ C } for r e [ l , oo). Since the union of the vertical translates of Z is invariant under homothety, ~Ctc~Ri.~:=O=Cec~?~Ri. ~ for all te[1, oo). Since Ri, ~ is compact, Ctc~ Ri,~=0 for large values of t.
Either C=C1 is disjoint from Ri, ~ or there is a largest number r e [ l , oo) such that C~ r R~,~ 4= 0. The maximum principle implies that an intersection point must occur on the boundary of C~ or on the boundary of Ri,~. However, we have shown that this cannot happen. This proves that C is disjoint from R~,~ for all i and ~:.
Suppose N is any embedded compact minimal surface in 11t 3 with boundary contained in D w Z and which is disjoint from the catenoid C. Suppose T is the outward-pointing normal to the bounded component of Y \ N where Yis the slab 0 < x 3 < 1. Lemma 2.1 in [ 18] implies that there exists an e > 0, dependent on C and independent of N, and a point x ~ N c~ P1 such that (T(x) , (0, 0, 1))__< 1 --e. Fixing this value of e. and letting N=Rz.~, i large, contradicts property 2. above. This contradiction proves that M is not a catenoid.
Hence, M cannot have empty boundary.
Case 2. (?M consists of k + 1 straight lines
Suppose now that the boundary of M consists of k + 1 straight lines, lying in a horizontal plane, meeting at equal angles. After a translation, we may assume that the lines meet at the point (0, 0, qo). Let Q denote the plane deter- mined by these lines. The symmetries of M include the limit of the symmetries of the surfaces M,, which fix a singular point in the boundary of Mr,. Further- more, M is contained in a halfspace defined by the plane Q. It follows that M can be extended to a properly embedded minimal surface A4 of finite nonzero total curvature by reflecting across one of the lines in the boundary of M. The surface 1~ possesses a "middle" annular end which is asymptotic to the plane Q. Since 2~ is not contained in the halfspace by the Strong Halfspace Theorem [17 ] , /~ has a catenoid-type end which is contained below Q. Without loss of generality, we may assume that Mr, converges to the portion of M lying below the plane Q, and therefore to the lower catenoid end. The analysis in Case 1 applied in the present case shows that M cannot have a catenoid-type end. It follows that ~M cannot consist of a set of k + l lines.
Case 3: ~M consists of one straight line
If (?M consists of a single straight line, then the surface M obtained by extending M by reflection across the boundary line is a properly immersed surface with ~71~=~. Since M is embedded in a halfspace, M is also embedded. As in the previous Case 1, M must be simply connected or an annulus. Therefore, M is a properly embedded minimal surface of finite nonzero total curvature which is either simply connected or is homeomorphic to the sphere punctured in 3 points, depending on whether M is simply connected or annular. A minimal

498 M. Ca l l ahan et al.
surface with these properties must be the flat plane [19]. However, M has a point of Gaussian curvature - 1 . This contradiction shows that ~M cannot consist of a single line.
Case 4: OM is two parallel lines
Suppose that the boundary of M consists of straight lines L 1 and L 2 lying in parallel horizontal planes P1 and P2- The lines L1, Lz are mapped into one another by the symmetry of M consisting of reflection through the plane F half way between P~ and P2- Let V~, be a vertical plane of symmetry of M,. which makes a positive angle of less than n/2 with the line L1. Since the singular points of t~Mt~ go to infinity as i--. ~ , the planes Vt, must eventually leave every compact subset of R 3. Since the two components of M~,\Vt, are simply connected (by Lemma 5.1 in [15]), it follows that the surface M is the limit of simply connected surfaces and, hence, each component of M is simply con- nected. The argument in Case 3 shows that the component of M containing one straight line of the boundary must contain the other straight line. The Strong Halfspace Theorem [17] then shows that M must consist of this compo- nent only, since M is contained in the horizontal slab containing ~3M. Let H be the group of symmetries of IR 3 generated by rotations around the lines L~ and Lz. The union of the H-orbits of M is a periodic properly embedded simply- connected minimal surface 1~I whose fundamental region has finite total curvature. By the main result in [32], such a surface must be the helicoid. However, the helicoid does not have a plane of reflective symmetry, while M is symmetric through reflection in F. This contradiction proves that the boundary of M does not consist of two straight lines.
This completes the proof of Assertion 3. []
At this point we have established that 0M is equal to two sets of k+ 1 coplanar straight lines in parallel planes. After a homothety and a translation, we may assume that M is contained in the slab between Po={X3=0} and /'1 = {x3 = 1} and that the singular points of OM are the points 6 and (0, 0, 1). Let G be the group generated by Sym(M) and rotation about one of the lines in c~M. We now prove that M is an annulus. It will then follow that the union of the G-orbits of M will satisfy the requirements of Theorem 1. This is explained after the proof of Assertion 4.
Assertion 4. M is an annulus.
Proof Define a sequence N~ of surfaces as follows. Apply a homothety and translation to each surface in the sequence {Mr1, Mt . . . . . } so that the boundary curves are contained in the planes P0={x3=0} and P~={x3=l} and so that the singular points of the boundary are at 6 and (0, 0, 1). Label these surfaces N~. Note that the expansion factor from the At~ is 1/ti and thus increases with i. Let N be the limit of the sequence N~. We note that reflection, p, in the xl x3-plane is a symmetry of N.
Recall that for each of the original annuli {At} there is a stable catenoid Ct, with its boundary circles contained on the same planes as the boundary curves of At, which satisfies the condition Ctc~ At= Int(C~)c~ Int(At)+0. Let E i be the corresponding catenoids for N~. Note that the boundary circles of El

Embedded minimal surfaces with an infinite number of ends 499
and the boundary curves of N/ occur on the same planes and Eic~N~ = Int(Ei)c~ Int(N~)4= 0. The original definition of the catenoids Ct easily implies that ~?E1 is disjoint from 0N~ for all i.
We now show that E1 c~N~=Int(E0c~Int(N~)4:0 for all i. Note first that Eic~Ni=Int(Ei)c~Int(Ni)=t=O. Continuously deform the stable catenoid Ei by decreasing the radius of its boundary circles until they are the same size as the boundary circles of El , while keeping the axis of symmetry of the catenoid constant. Then continuously move this catenoid along the xl-axis until it becomes El. It is evident that the boundary of the continuously deformed and moved catenoid never intersects N~. Thus, the maximum principle shows that every catenoid in the deformation and translation must intersect N, and, hence, that El c~ N~= Int(EOc~ Int(Ni)=t=O.
We will now apply the following lemma, whose proof will be deferred to the end of this section, to show that E ~ c~ N i contains fixed points of the symmetry p of N.
Lemma 7. Suppose C is a stable catenoid with boundary circles in two parallel planes Po and P1. Let Y be the slab between Po and 1~
1. Any compact immersed minimal surface with boundary on C is contained in the closure of the bounded part of Y \C.
2. Any compact immersed minimal surJ~tce whose boundary lies in the intersec- tion of C and a halfspace defined by a plane through the axis of symmetry of C, must be contained in C.
Assertion 5. The intersection of E1 and N contains fixed points of the reflective symmetry p of N.
Proof Recall that p is reflection in the x~ x3-plane. Note that the axis of symme- try of the catenoid E1 is contained in the xl x3-plane. Since E~ c~Ni4=0, E1 is compact, and the N i converge to N, Elc~N4=O. Suppose that EIc~N does not intersect the x~ x3-plane. After a possible translation of E1 along the x~-axis, we may assume that N intersects E~ transversely. Then the intersection set E~ c~ N contains a simple closed curve 7. If N is simply connected, this curve must bound a disk on N. If N is an annulus, every component of N\{xz=O} is simply connected by Lemma 5.1 in [15] and thus 7 bounds a disk on N. However, since EI C~N does not intersect the x~ x3-plane, 7 is contained on one side of that plane and Lemma 7 above shows that the disk on N bounded by 7 must lie in E~. This is impossible. []
Observe that removing the x3-axis from the collection of k + 1 vertical planes of reflectional symmetry of M produces 2(k + 1) vertical halfplanes of reflectional symmetry. Denote the halfplane making an angle of j~/(k + 1) with the positive xl-axis by Vj, 0 < j < 2 k + 1.
Assertion 6. Each of the halfplanes V~, V 3 . . . . , Vzk+l intersect M in a connected arc of planar symmetry joining the two singular points of c?M.
Proof Let C be the catenoid which is the image of E~ under rotation about the x3-axis by ~/(k + 1). Suppose for some integer i, the surface N~ n C 4= 0. Consid- er the family of catenoids C t = C + t . ( c o s 0, sin 0, 0) where O=~/(k+ 1). Since

500 M. C a l l a h a n et al,
Ni is compact, for large t, CtnN~=0. Furthermore, for all t, (?CtnNi=Ctnc?Ni =lb. Therefore, by the maximum principle, Ct n N~= 13 for all t > 0 and for all i. Lemma 5.1 in [15] implies that 1/1 n N/ is a connected arc ~i which joins the two singular points on (?N. Since Cnc~i=0 and cq intersects the x3-axis only at the points 0 and (0, 0, 1), the coordinates of c~ i are uniformly bounded. Thus the {ei} must converge to a compact simple arc c( in the intersection of N and 1/1. A similar argument holds for the other planes V3, 1/5 . . . . . []
We now apply Assertions 5 and 6 to prove that _N=N\{0, (0, 0, 1)} is an embedded annulus by constructing a curve on M which links the x3-axis. Since ,g does not intersect the x3-axis, this will prove that N is an annulus. (In fact, N corresponds to the surface M k between x3 = 0 and x3 = 1. See Image 7a.)
First note that the usual path lifting argument shows that every component of N is simply-connected or is an annulus. Every component of N must contain in its boundary at least one of the rays in (?N, because a component which did not contain any ray in (~N would be a properly embedded minimal surface contained in a slab, which is impossible by the Strong Halfspace Theorem [17]. Assertion 6 implies that each component of _g is invariant under reflection in one of the planes corresponding to one of the halfplanes appearing in the state- ment of Assertion 6. It follows from Assertion 5 that N n E 1 n Vo+0. I f /~ den- otes a component of _N with points in N n E 1 n V o, then /q is invariant under reflection Ro through Vo. In this case it is clear that the two rays contained in the sector of 11t 3 with boundary Vou I/1 are contained in the component ~ . Therefore, we can construct a curve from a point in N n E 1 n V o to one of these rays. From there, we can continue the curve to a neighborhood of the singular point of c~N which this ray meets. It is clear that since c( 1 = N n V 1 approaches this singular point, it is possible to continue the curve to a point on ~1. We now have a curve in _g from a point in Vo to a point in 1/1. Since reflections R o through Vo and R1 through V 1 must be symmetries of any compo- nents of N meeting V o or 1/1, respectively, we can continue the curve by these reflections. However, these reflections generate the rotational symmetry group of N around the x3-axis. Therefore the full extension of the curve will link the x3-axis. This shows that the component of _N on which we started is an annulus. However, this must be the only component, since it obviously contains all the rays in c~N.
This completes the proof of Assertion 4. []
Theorem 1 is now a simple consequence of the existence of the surface N. Let G denote the group of isometries of N3 generated by the isometries of N and by rotation by ~ radians around the lines contained in the boundary of N. The large symmetry group of N implies that the union of the G-orbits of N is a C 1 properly embedded surface M k in N3. Thus, Mk is seen to be smooth minimal surface except possibly at the points which are the G-orbits of the singular points of ON. However, an embedded minimal surface cannot have isolated singularities or points where it is not smooth. It follows that M k is an everywhere-smooth minimal surface. If K denotes the subgroup of G consisting of translations, then K is clearly the set of vectors {(0, 0, 2n)l n~2g}. A simple Euler characteristic calculation of Mk/K together with the fact that

Embedded minimal surfaces with an infinite number of ends 501
K acts in an orientat ion-preserving manner on Mk shows that Mk/K is a closed orientable surface of genus 2k. The remaining statements of Theorem 1 follow from the construction.
Proof of Lemma 7. Suppose M is a compac t immersed minimal surface with boundary on C. Assume that M c~ Y'4:0 where Y' is the unbounded componen t of Y~C. Let r o and rl be the radii of the boundary circles of C in Po and P1, respectively. Consider the family Ct, t e l1 , Go), of stable catenoids having the same axis of symmetry as C with boundary circles in Po and P~ of radii tro and trl, respectively. It is clear that for t sufficiently large, Ctc~ M = 0 . Since C1 c~M=Cc~M~OM4:0, there is some largest t, to, such that CraM4:0. By the max imum principle, this first intersection must occur on OM or OCt~ Since ~McC1 and C l C ~ C t = 0 for t > l , it is clear that c3Mc~C~o=0. Fur thermore , by the convex hull property, M lies in the slab Y and can intersect t3Y only on its boundary . Therefore, since #CtoCOY,, M c~c3Ct,,=0. This contradict ion completes the proof of s tatement 1.
Suppose M is a minimal surface satisfying the condit ions of statement 2 of the Lemma. Let ~/ be an outward unit normal to the the halfspace H in which c3M is contained, and let D = C ~ H. The convex hull proper ty and state- ment 1. imply that M lies in the closure of the bounded componen t of (Y~ H)\D. Consider the translations Dt=D+t.ft, te[O, ~). Since D is a graph over c~H, the translations are all disjoint. It is clear that for t sufficiently large, De c~ H = 0 =D,c~M. However, Doc~M~3M+O. Therefore there is some largest t, to, such that D,,,c~M4:0. Suppose t o>0 . By the max imum principle, the first point of intersection must occur on ~M or on c~D~o. However, c3Mc~D~,cDoc~D,,=O. Also, ~3Dto c~ M = 0 since ~D~o lies in ~(Y~ H) and M can only intersect c3(y~ H) on its boundary (by the convex hull property). This contradicts the max imum principle and thus shows that there is no first intersection for t > 0. The surface M must thus be contained in the catenoid and the unbounded region of Y~C. However, by statement 1., M cannot enter the unbounded region of Y~C. There- fore, M c C . []
A. Appendix
A.1. A symmetric representation of the examples
If we write the rectangular torus ]~/R in Section 1.2 as the elliptic curve
w2 = ( z - 2)(z +,~) 0 < 2 < 1 , (z - l / ; ) (z + l/,~)
and let w = h k + 1, the Riemann su r face /~ can be written as
h2~k+l)=R(z) = ( z - 2 ) ( z + 2 ) ( z - 1/~)(z + 1/~)

502 M. Callahan et al.
A APPENDIX
- 1-'/;~ ~ I ~ -"
Fig. 15. The 2 representation. The Riemann surface M is a 2(k+ 1)-cover of this plane. The parameter 2 plays a role in this representation analogous to the role of t in the representation defined in Section 1.2
In this representa t ion of the surface, the points labelled in the previous section have the following names.
0 ~---~(--~, O) CO 1 = { - - l / / ~ , GO)
~2 =(2, 0) ~3 =(1/2, 0o) po = o92 = ()~, O) p , = (1,/~) p2 = ( - 1, h')
where /~ is a 2 ( k + 1)-st root of R(1). In this representa t ion the 1-form d ( corresponds, up to a constant , to
dz dz d~=
w(z +,O(z- 1/,~) h k+ '(z +,~)(z- 1/,~)
By checking divisors on the surface, it follows that
g=chk (z+ 1/2) (z + ,t)
d( dz (13) ~]= =
g ghk+l(z+2)(z--1/2)
where, as before, c ~ R is a cons tant determined so that g is uni tary on the fixed point set of reflection th rough x3 = 1/2.
In this representat ion, the geomet ry of M m a y be easily described. The ends lie at - 2 and - 1/2, and the axial points at 2 and 1/2. Let
~:{-~.<t__<,~}; Cz = ] R u {0o} - { - 1 /2< t < 1/2};
/h={;__<t__< 1/;}; L = { - 1 / ~ < t < -;,}.
See Fig. 15. Then:
�9 Lifts of the curves Va and r are m a p p e d into rays emana t ing f rom the xa-axis; �9 Lifts of the curves fix and fix are m a p p e d into p lanar lines of curvature in vertical planes; �9 A ( k + l)-fold circuit of the unit circle [z[ = 1 lifts to a p lanar line of curva ture in either x 3 = 1/2 or x 3 = 3 / 2 ;

Embedded minimal surfaces with an infinite number of ends 503
-4
,1
Fig. 16. The period as function of 2 for k = 1
7
f J
0 Fig. 17. The height b as a function of 2 for k = 1
1
�9 The constant c in equat ion (13) for g is forced to be equal to 2 k~r by the requirement that that inversion th rough [z[ = 1 lifts to an isometry; �9 Complex conjugat ion z~---~5 lifts to either reflection in one of the vertical planes of symmetry, or rotat ion a round one of the lines; �9 Inversion th rough the unit circle z~--, 1/i lifts to reflection in the plane x3 = l/2 (which is the same reflection in x 3 = 3/2 in R3/~'); �9 The fundamental domain F described in the previous section can be thought of as a lift of the lower semi-disk { [z [< l , I m z < 0 } . The corners are po=(2 , 0), p~ =(1, ~ , p 2 = ( - 1, h') and 0 = ( - 2 , 0).
We used a representat ion similar to this one to compute the images of the Mk accompany ing this paper. We did not use the representat ion of Section 1.2 because that would have required evaluating the Weierstrass ~)-function and its derivative for each mesh point. By contrast , using a representat ion which takes the surface to be a hyperelliptic covering of the sphere requires that one only evaluate a polynomial of low degree at each mesh point. This is far faster. (Actually, we did not use precisely the equat ions above because the computer cannot integrate to the point oo, and oo is a regular point of X. Instead, we choose a representat ion of the M k in which oo corresponds to an end and, hence, in which X restricted to the complex plane is proper ; this representat ion is related to the one using 2 by a linear-fractional transformation.)
Fig. 16 contains a graph of the computed period as a function of 2, for k = 1. Note that the period varies monotonica l ly with 2. Fig. 17 shows a graph of

504 M, Callahan et al.
b, the ratio of the lengths of the curves 7~ and 7o on the surface, as a function of 2 (again for k= 1). This graph, too, is monotonic. These two graphs partly confirm the argument of Section 3.
A.2. Riemann's example
For any t > O, Riemann's example J///, (described in the introduction and illustrat- ed in Image 1) may be written down using the Weierstrass representation on the quotient torus tE/{m+itnlm, ne2g} as follows:
d~ g
On these surfaces, the ends lie at the lattice point 0 and the half-lattice point r Rotation by 7r around the point r lifts to rotation around a line in space which interchanges the ends. (This line is not contained in the surface.) The value of the constant c is forced by this symmetry (because g must be unitary at the fixed point 0)3/2). Riemann's example exists for all rectan- gular tori, because the rotational symmetry forces the period to the zero.
The above equations for Riemann's example may be found easily using the technique of Section 1.1.
If we take k equal to 0 in the equations for Mk in Section 1.2, we get
de g=cw=c(~o(~)-go(oO) and r/= . g
The example M o would have an orientation-reversing symmetry interchanging the ends corresponding to reflection through the line Re ~= 1/4. In space, this corresponds to a reflection through a plane half way between the plane ends. If M o existed, the portion of the surface lying between the plane ends at heights x 3 = 0 and x3 = 1 would be an annulus of finite total curvature bounded by two parallel lines. An application of the Alexandrov reflection principle, similar to the application of this principle by Schoen in [30], can be used to show that M o does not exist. (See [-4] for a proof.)
For completeness, we give the equations for Riemann's example when the torus is represented as a double covering of the sphere defined by
Wz =4 Z(Z--1)(Z-- fl).
Here fl is the ratio of the values of ~J on the half-periods. (For rectangular tori, fl is always real and negative.) Then the equations for Riemann's example are
dz g=cz and q -
w g "
The constant c is determined by the requirement that g be unitary at the fixed points of the orientation-preserving symmetry corresponding to the rotation around a line which interchanges the ends.

Embedded minimal surfaces with an infinite number of ends 505
References
1. Allard, W.K.: On the first variation of a manifold: boundary behavior. Ann. Math. 101,418M-46 (1975)
2. Callahan, M., Hoffman, D., Hoffman, J.: Computer graphics tools for the study of minimal surfaces. Comm. Assoc. Comput. Mach. 31,648 661 (1988)
3. Callahan, M., Hoffman, D., Meeks, III, W.H. : Embedded minimal surfaces with four ends (Preprint) 4. Callahan, M., Hoffman, D., Meeks, III, W.H.: The structure of singly periodic minimal surfaces
(Preprint) 5. Costa, C.: Example of a complete minimal immersion in R 3 of genus one and three embedded
ends. Bull. Soc. Bras. Mat 15, 47 54 (1984) 6. Courant, R.: Dirichlet's principle. Conformal Mapping and Minimal Surfaces. New York, Intersci-
ence Publishers, Inc., 1950 7. Douglas, J.: Minimal surfaces of higher topological structure. Ann. Math. 40, 205-298 (1959) 8. Gackstatter, F.: Lectures on minimal surfaces. USP Sao Paulo Brasil (1980) 9. Gackstatter, F.: Uber die Dimension einer Minimalfl/iche und zur Ungleichung von St. Cohn-
Vossen. Arch. Rat. Mech. Anal. 61, 141 t52 (1976) 10. Hardt, R., Simon, L.: Boundary regularity and embedded minimal solutions for the oriented
Plateau problem. Ann. Math. 110, 439486 (1979) 11. Hildebrandt, S,: Boundary behavior of minimal surfaces. Arch. Rat. Mech. Anal. 35, 47 81 (1969) 12. Hoffman, D.: The computer-aided discovery of new embedded minimal surfaces. Math. Intel.
9, 8-21 (1987) 13. Hoffman, D.: The construction of families of embedded minimal surfaces. In: Concus, P., Finn,
R. (eds.) (Variational Methods of Free Surface Interfaces, pp. 25 36) Berlin-tteidelberg-New York : Springer, 1987
14. Hoffman, D., Meeks, 1II, W.H.: A complete embedded minimal surface with genus one, three ends and finite total curvature. J. Differ. Geom. 21, 109-127 (1985)
15. Hoffman, D., Meeks, III, W.H.: Embedded minimal surfaces of finite topology (Preprint) 16. Hoffman, D., Meeks, III, W.H.: One-parameter families of embedded minmal surfaces (Preprint) 17. Hoffman, D., Meeks, II1, W.H.: The strong halfspacc theorem for minimal surfaces (Preprint) 18. Hoffman, D., Meeks, III, W.H.: A variational approach to the existence of complete embedded
minimal surfaces of finite topology. Duke Math. J. 57, 877-893 (1988) 19. Jorge, L.P.M., Meeks, III, W.H.: The topology of complete minimal surfaces of finite total Gaussian
curvature. Topology 22, 203-221 (1983) 20. Karcher, H.: New examples of periodic minimal surfaces. Manuscr Math. 62, 83 (1988) 21. Lawson, Jr., H.B.: Lectures on Minimal Submanifolds. Berkeley, Publish or Perish Press, 1971 22. Mceks, 1II, W.H.: A survey of the geometric results in the classical theory of minimal surfaces.
Bol. Soc. Brasil Mat. 12, 29-86 (1981) 23. Meeks, II1, W.H., Yau, S.T.: The classical Plateau problem and the topology of three-dimensional
manifolds. Topology 21,409-442 (1982) 24. Meeks, III, W.H., Yau, S.T.: The existence of embedded minimal surfaces and the problem of
uniqueness. Math. Z. 179, 151-168 (1982) 25. Ossermann, R.: Global properties of minimal surfaces in E 3 and E". Ann. Math. 80, 340~364
(1964) 26. Osserman, R.: A survey of minimal surfaces. New York: Dover Publications, 2nd edition, 1986 27. Pitts, J., Rubenstein, H.: Existence of minimal surfaces of bounded topological type in 3-manifolds.
In: Proceedings of the Center for Mathematical Analysis, Australian National University, Cam- bera, Australia, 1987. Vol. 10
28. Protter, M., Weinberger, H.: Max imum principles in differential equations. Englewood, N J: Prentice-Hall, 1967
29. Riemann, B.: Oeuvres Math6matiques de Riemann. Paris: Gauthiers-Villars, 1898 30. Schoen, R.: Uniqueness, symmetry, and embeddedness of minimal surfaces. J. Differ. Geom. 18,
791-809 (1983) 31. Tannery, J., Molk, J.: t~16ments de la Th6orie des Fonctions Elliptiques. Paris: Gauthier-ViUars,
et Fils, 1898 32. Toubiana, E.: On the uniqueness of the helicoid (to appear in Annales de l 'Institut Fourier)
Oblatum 30-X-1987 & 30-VI-1988