em wave diffraction - institut teknologi...
TRANSCRIPT

Course Plan:
● Introduction● Simple Harmonic Oscillation
(Vibration)● Transverse wave (1-dimensional):
wave motion on a rope● Longitudinal wave: the sound
wave● Electromagnetic wave
● Fourier Analysis
● Modulation
● Transmission and reflection
● Interference and diffraction
● Wave guide
References● M. O. Tjia, Gelombang, Dabara.● HJ Pain, The Physics of Vibrations and Waves, 6th ed. Wiley.● Hariadi P. Supangkat, Catatan Kuliah FI311: Gelombang

Course Rules●Evaluation criteria
○1st Exam (30%)○2nd Exam (40%)○Assignments/Quizzes (20%)○RBL project (10%)
●Grade conversion:○Similar to First Year Physics
*)Subject to agreement from parallel class lecturers

Simple Harmonic Oscillation (Vibration)
1. Simple Harmonic Oscillation& Coupled Oscillators
Review : Math. Phys. & Mechanics

Objectives
After studying this chapter you should be able to:
•Derive simple harmonic motion for various physical models
•Compute the characteristic frequency of simple harmonic oscillation
•Derive the equation of motion for coupled oscillators
•Compute the solutions for coupled oscillators
•Use matrix equation to find the eigen solutions of coupled oscillators

What is “wave”?
• Wave is a propagation of a local disturbances (oscillation) to a certain physical quantities.
• Example of oscillations:• Oscillation of pressure• Oscillation of position• Oscillation of mass density• Oscillation of electric field or magnetic field• Oscillation of current• Etc
• The local oscillation can propagate through a medium except for electromagnetic oscillation.
• The oscillation may be periodic or unperiodic• A special case of periodic oscillation is simple harmonic
oscillation (more about it!)• The propagating waves may be 1D,2D or 3D.

Simple Harmonic Oscillator
•Model 1 of 1D SHO : a mass attached to a spring
–Consider a mass m attached to an ideal spring
with spring constant k on a smooth horizontal
plane.
The force (horizontally) will be 𝐹 = −𝑘 𝑥 − 𝑥0
Where x0 is the position when the spring is relaxed (equilibrium)
According to Newton’s laws of motion the acceleration is given by:
𝑚𝑑2𝑥
𝑑𝑡2 = −𝑘 𝑥 − 𝑥0 or 𝑑2𝑋
𝑑𝑡2 = −𝜔2𝑋
Where X≡x-x0 : displacement with respect to x0.
And 𝜔2 =𝑘
𝑚: characteristic frequency of the system.
k
x0 x

Simple Harmonic Oscillator
• Solution:
Many possible solutions, one of them is the well known harmonic function:
𝑎. 𝑋 𝑡 = 𝐴 cos(𝜔𝑡 + 𝛼), or
𝑏. 𝑋 𝑡 = 𝐴1 cos(𝜔𝑡) + 𝐴2 sin(𝜔𝑡), or
𝑐. 𝑋 𝑡 = 𝐴 exp 𝑖 𝜔𝑡 + 𝛼 : solusi realnya dari Re (X) atau Im (X)
Show that those are equivalent solutions!
Let’s take (a), then A : amplitude and 𝜔 : angular frequency = 2𝜋𝑓 =2𝜋
𝑇, where T :
period
If X(t) is obtained then everything about the motion is completely determined, such as :
Velocity: 𝑣 =𝑑𝑋
𝑑𝑡= −𝐴𝜔 sin(𝜔𝑡 + 𝛼), 𝐴𝜔 = 𝑣_ max
Acceleration: 𝑎 =𝑑𝑣
𝑑𝑡= 𝐴𝜔2 sin 𝜔𝑡 + 𝛼 , 𝐴𝜔2 = 𝑎_max

Simple Harmonic Oscillator
Question:
1. Where are the positions with max velocity ? Max acceleration? Min velocity? Min acceleration?
2. Explain why in such positions the quantities (v,a) are max or min.
φ l
W=mg
2. Model 2: Simple pendulum
Small mass m (in what sense?) hangs freely by a massless string (non elastic too) with length l . Suppose at t=0 s, the mass m makes an angle 𝜙 to its equilibrium position.
According to Newton’s law of motion for rotation : 𝜏 = 𝐼𝛼
Where τ is the torque by the mass weight, I : the inertial moment and α the angular acceleration.
Simple Harmonic Oscillator
Or:
−𝑚𝑔𝑙 sin𝜙 = 𝐼𝑑2𝜙
𝑑𝑡2
Question : Why the torque has a negative sign?
Small angle approximation : if 𝜙 is small (in rad sense) then 𝑠𝑖𝑛𝜙 ≈ 𝜙
Question: Check the value of sin φ, for φ=0.01, 0.1, 0.2, 0.3 rad. Express the angle in degree (◦) and make a rough sketch for the magnitudes for each of those angles.or
For small angle, the equation of motion may be approximated by:𝑑2𝜙
𝑑𝑡2 ≈ −𝑚𝑔𝑙
𝐼𝜙 = −𝜔2𝜙
With 𝜔2 =𝑚𝑔𝑙
𝐼, for small mass, then I=ml2 and 𝜔2 = 𝑔/𝑙 the characteristic
frequency of the system.

Simple Harmonic Oscillator
Question:
1. What is the motion if the angle 𝜙 is not small?
3. Model 3: LC electric network
A capacitor with capacitance C is connected in series with an inductor with inductance L. Initially the circuit is connected to a battery, which is then removed.
The Kirchhoff’s law for the voltage across this network gives :
L𝑑𝐼
𝑑𝑡−
𝑄
𝐶= 0,
Where I is the electric current and Q is electric charge.
The electric current is given by : 𝐼 = −𝑑𝑄
𝑑𝑡
(why there is a negative sign?)
Substitute this expression gives the equation of “motion”:𝑑2𝑄
𝑑𝑡2 = −1
𝐿𝐶𝑄
Which is again a simple harmonic oscillator equation with characteristic frequency
𝜔2 =1
𝐿𝐶

Simple Harmonic Oscillator
Question:
1. Derive a similar equation for electric current.
2. For each of the following physical systems, show that their equation of motions may be reduced to a simple harmonic oscillator as given in the figures.
3. Then write down the expression for the characteristic frequencies for each system
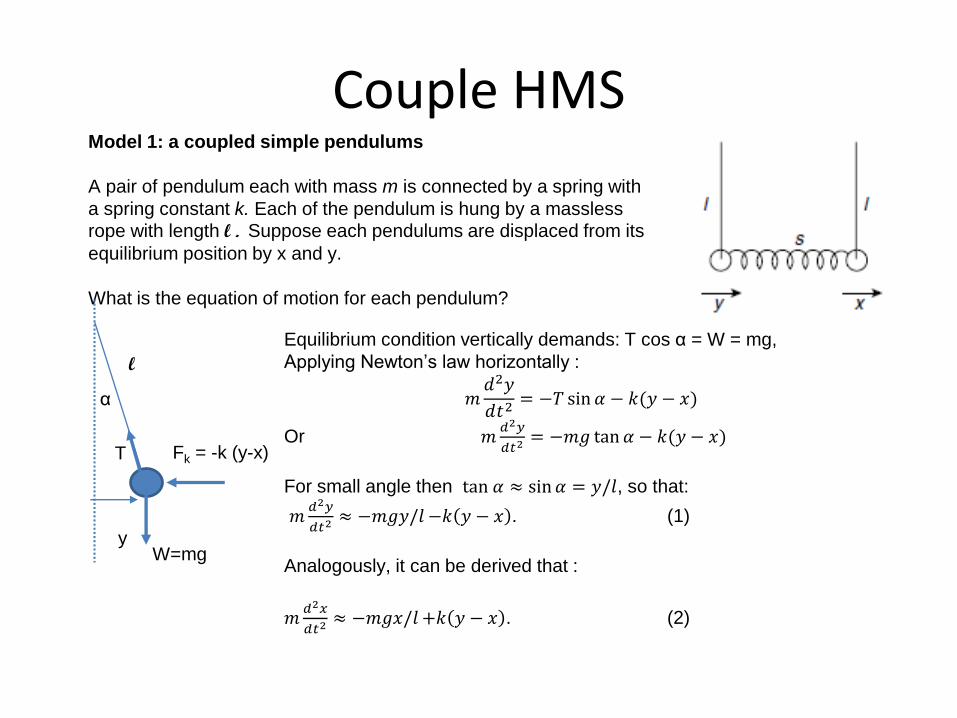
Couple HMSModel 1: a coupled simple pendulums
A pair of pendulum each with mass m is connected by a spring with
a spring constant k. Each of the pendulum is hung by a massless
rope with length l . Suppose each pendulums are displaced from its
equilibrium position by x and y.
What is the equation of motion for each pendulum?
Fk = -k (y-x)T
W=mg
l
α
y
Equilibrium condition vertically demands: T cos α = W = mg,
Applying Newton’s law horizontally :
𝑚𝑑2𝑦
𝑑𝑡2= −𝑇 sin 𝛼 − 𝑘(𝑦 − 𝑥)
Or 𝑚𝑑2𝑦
𝑑𝑡2 = −𝑚𝑔 tan 𝛼 − 𝑘(𝑦 − 𝑥)
For small angle then tan 𝛼 ≈ sin𝛼 = 𝑦/𝑙, so that:
𝑚𝑑2𝑦
𝑑𝑡2 ≈ −𝑚𝑔𝑦/𝑙 −𝑘 𝑦 − 𝑥 . (1)
Analogously, it can be derived that :
𝑚𝑑2𝑥
𝑑𝑡2 ≈ −𝑚𝑔𝑥/𝑙 +𝑘 𝑦 − 𝑥 . (2)

Couple HMSIf there is no spring then each pendulum will vibrate with the characteristic frequency 𝜔0
2 =𝑔
𝑙, therefore we can write eq (1) and (2) as:
𝑑2𝑦
𝑑𝑡2 +𝜔02𝑦 = −
𝑘
𝑚𝑦 − 𝑥 . (3)
𝑑2𝑥
𝑑𝑡2 +𝜔02𝑥 = −
𝑘
𝑚𝑥 − 𝑦 . (4)
Finding the solution:
The coupled differential equations may be de-coupled by using substitution:
𝑋 = 𝑥 + 𝑦 and 𝑌 = 𝑥 − 𝑦Question: What is the physical meaning of this substitution?
This new coordinates (X,Y) are called normal coordinates. The frequencies associated with each
normal coordinates are called normal modes.
Replace the original equations with (3)+(4) and (3)-(4):
𝑑2𝑋
𝑑𝑡2 +𝜔02𝑋 = 0 (5)
𝑑2𝑌
𝑑𝑡2 +(𝜔02 +
2𝑘
𝑚) 𝑌 = 0 (6)
Meaning of equations:
If Y=0, the x=y all the times, the motion is completely described by (5, with normal frequency 𝜔02 =
𝑙
𝑔
Can you imagine the motion ? This is the “in-phase” motion.

Normal Modes and Normal Frequencies
• If X=0, the x=-y all the time, this is the “out-of-phase” motion,
• The motion is completely described by (6)
with normal frequency 𝜔𝑏2 = 𝜔0
2 +2𝑘
𝑚
• In normal coordinates each equation of motion is a differential equation with constant coeff and each eq. only contains ONE dependent variable (e.g, X or Y)
• Vibration associated with each normal coordinate is called normal mode and it has its own normal frequency.
• In undamped system the energy of each normal mode are :
potential energy (~𝑋2 𝑜𝑟 𝑌2) and kinetic energy (~ 𝑋2 𝑜𝑟 𝑌2)
Thus for normal coordinate X, the energy 𝐸𝑋 = 𝑎𝑋2 + 𝑏 𝑋2 and
normal coordinate Y, the energy 𝐸𝑌 = 𝑐𝑌2 + 𝑑 𝑌 where a,b,c and d are constant.
• In this example there are four different energies, therefore this system has 4 degree of freedom.
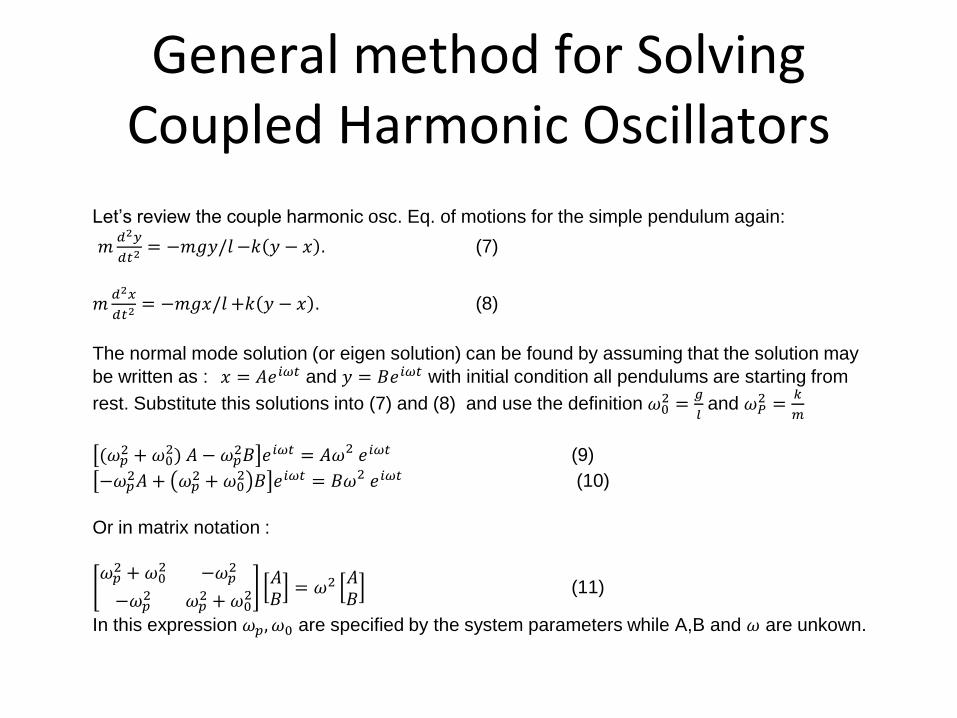
General method for Solving Coupled Harmonic Oscillators
Let’s review the couple harmonic osc. Eq. of motions for the simple pendulum again:
𝑚𝑑2𝑦
𝑑𝑡2 = −𝑚𝑔𝑦/𝑙 −𝑘 𝑦 − 𝑥 . (7)
𝑚𝑑2𝑥
𝑑𝑡2 = −𝑚𝑔𝑥/𝑙 +𝑘 𝑦 − 𝑥 . (8)
The normal mode solution (or eigen solution) can be found by assuming that the solution may
be written as : 𝑥 = 𝐴𝑒𝑖𝜔𝑡 and 𝑦 = 𝐵𝑒𝑖𝜔𝑡 with initial condition all pendulums are starting from
rest. Substitute this solutions into (7) and (8) and use the definition 𝜔02 =
𝑔
𝑙and 𝜔𝑃
2 =𝑘
𝑚
(𝜔𝑝2 + 𝜔0
2) 𝐴 − 𝜔𝑝2𝐵 𝑒𝑖𝜔𝑡 = 𝐴𝜔2 𝑒𝑖𝜔𝑡 (9)
−𝜔𝑝2𝐴 + 𝜔𝑝
2 + 𝜔02 𝐵 𝑒𝑖𝜔𝑡 = 𝐵𝜔2 𝑒𝑖𝜔𝑡 (10)
Or in matrix notation :
𝜔𝑝2 + 𝜔0
2 −𝜔𝑝2
−𝜔𝑝2 𝜔𝑝
2 + 𝜔02
𝐴𝐵
= 𝜔2 𝐴𝐵
(11)
In this expression 𝜔𝑝, 𝜔0 are specified by the system parameters while A,B and 𝜔 are unkown.
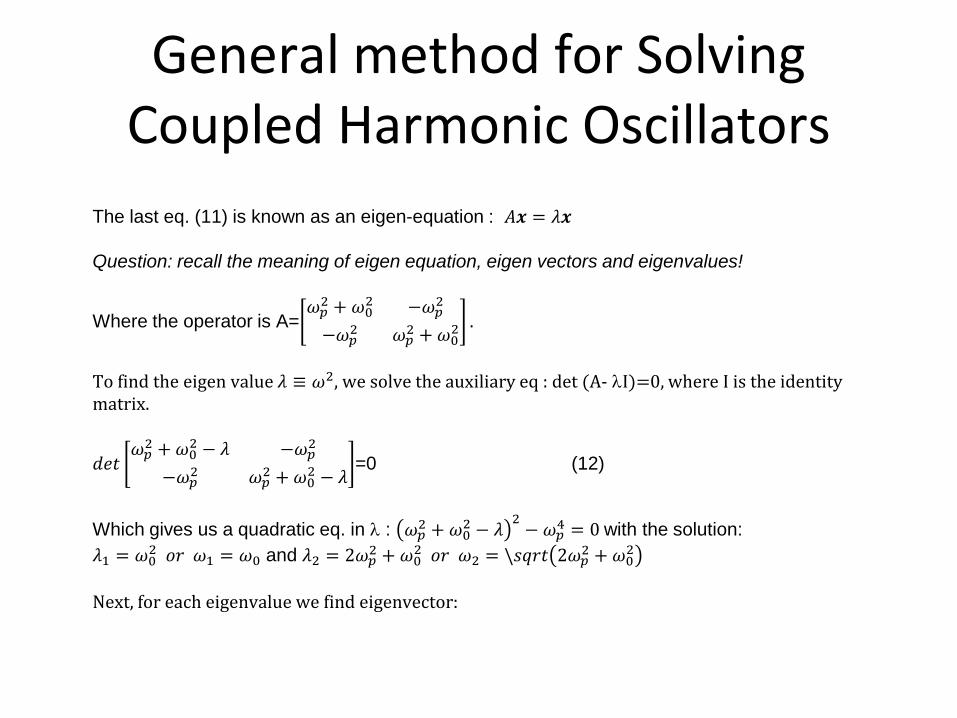
General method for Solving Coupled Harmonic Oscillators
The last eq. (11) is known as an eigen-equation : 𝐴𝒙 = 𝜆𝒙
Question: recall the meaning of eigen equation, eigen vectors and eigenvalues!
Where the operator is A=𝜔𝑝
2 + 𝜔02 −𝜔𝑝
2
−𝜔𝑝2 𝜔𝑝
2 + 𝜔02 .
To find the eigen value 𝜆 ≡ 𝜔2, we solve the auxiliary eq : det (A-I)=0, where I is the identity matrix.
𝑑𝑒𝑡𝜔𝑝
2 + 𝜔02 − 𝜆 −𝜔𝑝
2
−𝜔𝑝2 𝜔𝑝
2 + 𝜔02 − 𝜆
=0 (12)
Which gives us a quadratic eq. in : 𝜔𝑝2 + 𝜔0
2 − 𝜆2
− 𝜔𝑝4 = 0 with the solution:
𝜆1 = 𝜔02 𝑜𝑟 𝜔1 = 𝜔0 and 𝜆2 = 2𝜔𝑝
2 + 𝜔02 𝑜𝑟 𝜔2 = \𝑠𝑞𝑟𝑡 2𝜔𝑝
2 + 𝜔02
Next, for each eigenvalue we find eigenvector:

General method for Solving Coupled Harmonic Oscillators
For 𝜆 = 𝜔02, the eigenvector is obtained by solving: Ax=x or (Ax-I)x=0 where I is the identity
matrix, and 𝒙 =𝑨𝑩
Question: why do we need matrix I in the above expression?
𝜔𝑝2 + 𝜔0
2 − 𝜔02 −𝜔𝑝
2
−𝜔𝑝2 𝜔𝑝
2 + 𝜔02 − 𝜔0
2𝐴𝐵
=00
(13)
The solution is A=B,the “in-phase” motion.
Question: Write the solution for X and Y also in original coordinates x and y.
Analogously, for 𝜆 = 2𝜔𝑝2 + 𝜔0
2 :
𝜔𝑝2 + 𝜔0
2 − (2𝜔𝑝2 + 𝜔0
2) −𝜔𝑝2
−𝜔𝑝2 𝜔𝑝
2 + 𝜔02 − (2𝜔𝑝
2 + 𝜔02)
𝐴𝐵
=00
(14)
Which give the solution A=-B.the antiphase motion.
Question: Write the solution for X and Y also in original coordinates x and y.
If, initially the pendulums have initial velocities, then the solutions have the form:
𝑦 = 𝐴𝑒𝑖(𝜔𝑡−𝛼1) and 𝑥 = 𝐵𝑒𝑖(𝜔𝑡−𝛼2). The extra parameters α are to be found from initial
conditions!

Other Couple HMS modelsModel 2: a coupled spring system.
Two blocks of masses are connected by a series of identical springs
with spring constant k. Suppose the displacements of each ,mass from
its equilibrium position is given by y and x:
The floor is smooth frictionles
Similar to coupled pendulum system, the equation of motion will be given by :
𝑚𝑑2𝑦
𝑑𝑡2 = −𝑘𝑦 − 𝑘(𝑦 − 𝑥) (15)
𝑚𝑑2𝑥
𝑑𝑡2 = −𝑘𝑥 − 𝑘(𝑥 − 𝑦) (16)
Using similar method we can solve these pair of eqs. Adding (𝑌 ≡ 𝑦 + 𝑥) and substracting 𝑋 = 𝑦 − 𝑥will de-couple these eqs:
𝑚𝑑2𝑌
𝑑𝑡2 = −𝑘𝑌 (17)
𝑚𝑑2𝑥
𝑑𝑡2 = −3𝑘𝑋 (18)
The normal coordinates in this system is (X,Y). If X=0, y=x is the “in-phase” mode, both masses move
in a similar way with freq. 𝜔12 =
𝑘
𝑚. This is the motion of the center of mass mode, no relative motion
between the masses.
y
km
km
x

Other Couple HMS modelsThe second case is when Y=0, x+y=0 or x=-y, the “anti-phase” motion. Where each mass moves in
opposite with frequency 𝜔22 = 3𝑘/𝑚. The center of mass does not move but each mass moves relative
to the center of mass.
The general solution can be written as :
𝑌 = 𝐴 cos(𝜔1𝑡 + 𝛼1) and 𝑋 = 𝐵 cos(𝜔1𝑡 + 𝛼2) . (19)
The constants A,B and α1,2 are determined by its initial conditions.
Question: Can you write equivalent other form of general solutions?
LLModel 3: Coupled LC system.
Using Kirchhofff’s Law in the circuit we can generate 2
coupled differential equations for the currents and
charges:
𝐿𝑑𝐼𝑎
𝑑𝑡−
𝑞1
𝐶+
𝑞2
𝐶= 0 (20)
𝐿𝑑𝐼𝑏
𝑑𝑡−
𝑞2
𝐶+
𝑞3
𝐶= 0 (21)

Other Couple HMS modelsTake the derivative with respect to t once again:
𝐿𝑑2𝐼𝑎
𝑑𝑡2 −1
𝐶
𝑑𝑞1
𝑑𝑡+
1
𝐶
𝑑𝑞2
𝑑𝑡= 0 (20)
𝐿𝑑𝐼𝑏
𝑑𝑡−
1
𝐶
𝑑𝑞2
𝑑𝑡+
1
𝐶
𝑑𝑞3
𝑑𝑡= 0 (21)
But conservation of charges gives the following relationships:𝑑𝑞1
𝑑𝑡= −𝐼𝑎
𝑑𝑞3
𝑑𝑡= +𝐼𝑏
𝑑𝑞2
𝑑𝑡= 𝐼𝑎 − 𝐼𝑏
Question: Can you explain why the sign in dq1/dt is negative whereas in dq3/dt is positive?
Substitute these expressions into (20) and (21) result in the following equation:
𝐿𝑑2𝐼𝑎
𝑑𝑡2 +1
𝐶(2𝐼𝑎−𝐼𝑏) = 0 (20)
𝐿𝑑𝐼𝑏
𝑑𝑡+
1
𝐶(2𝐼𝑏 − 𝐼𝑎) = 0 (21)
These are coupled differential eq . To decouple we define the normal coordinates as :
𝐼1 = 𝐼𝑎 + 𝐼𝑏 and 𝐼2 = 𝐼𝑎 − 𝐼𝑏 (22)

Other Couple HMS modelsSubstitute (22) into (20) and (21):
𝐿𝑑2𝐼1
𝑑𝑡2 +𝐼1
𝐶= 0 (23)
𝐿𝑑𝐼2
𝑑𝑡+
3
𝐶𝐼2 = 0 (24)
Compare to (17) and (18)!
Therefore the general solution may be written as :
𝐼1 = 𝐴 cos(𝜔1𝑡 + 𝛼1) and 𝐼2 = 𝐵 cos(𝜔1𝑡 + 𝛼2) . (25)
Where the frequencies are 𝜔12 =
1
𝐿𝐶and 𝜔2
2 =3
𝐿𝐶
From (25) we can write the solution in original coordinates as sum of the solution in terms of the normal
coordinates.
Each of the solution in normal coordinates is independent, and it vibrates with its own frequency.
Thus the solution of the original problem can be written as a linear superposition of these solution in
normal coordinates each with its own frequency. This will lead to the general method to analyze
vibration known as Fourier Series and Fourier Transform (see your Math. Phys. Lectures)

Small OscillationThe driving “force” behind a simple harmonic oscillation is a restoring force which is
proportional to the “displacement”. In spring-mass system the force is the ideal elastic
force (Hooke’s law):
F = - k x
Where x : displacement.
It is called a “restoring” force since it always tries to restore the mass to its equilibrium
position. Check the motion!
The “force” is not necessary a pull or push as we have seen along the slides for different
situations. And so does the “displacement”.
However, we can also express this “restoring” force in term of energy, it is equivalent to
a quadratic potensial energy:
𝑉 𝑥 = − 0
𝑥𝐹𝑑𝑥 = + 0
𝑥𝑘𝑥𝑑𝑥 =
1
2𝑘𝑥2
0
2
4
6
8
10
-4 -2 0 2 4
V
In general, even when the potential energy of the system is not
exactly quadratic, as long as it has a minimum then the system
may oscillate close to this minimum in simple harmonic style.

Small OscillationSuppose x=a is the location of the minimum of V(x), then from Calculus we learn:
𝑑𝑉
𝑑𝑥𝑥=𝑎
= 0 𝑑2𝑉
𝑑𝑥2
𝑥=𝑎
> 0
Using Taylor Expansion at x=a :
𝑉 𝑥 = 𝑉 𝑎 + 𝑥 − 𝑎 𝑑𝑉
𝑑𝑥𝑥=𝑎
+1
2𝑥 − 𝑎 2
𝑑2𝑉
𝑑𝑥2
𝑥=𝑎
+ ⋯ …
As long as x is close to a (that is |x-a| << 1) then we can truncate the series up to the 3rd
term, and relative to the minimum energy we can express the energy as :
𝑉 𝑥 − 𝑉 𝑎 =1
2𝑥 − 𝑎 2
𝑑2𝑉
𝑑𝑥2
𝑥=𝑎
=1
2𝑘 𝑥 − 𝑎 2
Where 𝑘 ≡ 𝑑2𝑉
𝑑𝑥2𝑥=𝑎
> 0. The above expression denotes a simple harmonic motion.