Download - Final Year Project Thesis
THE AERODYNAMIC ANALYSIS OF BWB BASELINE II
E5-8 UAV WITH CANARD ASPECT RATIO (AR) OF 8 AT
ANGLE OF ATTACK OF 10 DEGREE AT 0.1 MACH
NUMBER THROUGH CFD SIMULATION AT DIFFERENT
CANARD SETTING ANGLES
MUHAMMAD NAZREEN BIN ZULKARNAIN
(2008400848)
BACHELOR ENGINEERING (HONS) (MECHANICAL)
UNIVERSITI TEKNOLOGI MARA (UiTM)
JULY 2012

“I/We declared that this thesis is the result of my/our own work except the ideas and
summaries which I/We have clarified their sources. The thesis has not been accepted for
any degree and is not concurrently submitted in candidature of any degree.”
Signed : ………………………..
Date : …………………....
Muhammad Nazreen Bin Zulkarnain
UiTM No : 2008400848
“I declared that I read this thesis and in our point of view this thesis is qualified in term
of scope and quality for the purpose of awarding the Degree of Mechanical Engineering
(Hons) Mechanical.”
Signed : ……………………..
Date : ……………………..
Supervisor or Project Advisor
Prof. Dr. Wirachman Wisnoe
Faculty of Mechanical Engineering
MARA University of Technology (UiTM)
40450 Shah Alam
Selangor
Signed : ……………………..
Date : ……………………..
Co- Supervisor
Puan Zurriati Mohd. Ali
Faculty of Mechanical Engineering
MARA University of Technology (UiTM)
40450 Shah Alam
Selangor

Accepted :
Signed : ……………………….
Date : ……………………….
Course Coordinator
Wan Sulaiman Bin Wan Mohamad
Faculty of Mechanical Engineering
MARA University of Technology (UiTM)
40450 Shah Alam
Selangor
i
Page Title
THE AERODYNAMIC ANALYSIS OF BWB BASELINE II E5-8 UAV WITH
CANARD ASPECT RATIO (AR) OF 8 AT ANGLE OF ATTACK OF 10
DEGREE AT 0.1 MACH NUMBER THROUGH CFD SIMULATION AT
DIFFERENT CANARD SETTING ANGLES
MUHAMMAD NAZREEN BIN ZULKARNAIN
(2008400848)
A thesis submitted in partial fulfillment of the requirements for the award of Bachelor
Engineering (Hons) (Mechanical)
Faculty of Mechanical Engineering
Universiti Teknologi MARA (UiTM)
JULY 2012
ii
ACKNOWLEDGEMENT
In the name of Allah the Most Gracious, Most Merciful, I would like to express
my greatest gratitude for giving me the strength and patience to overcome the challenges
and difficulties in completing this thesis and also for His Blessings. I would also like to
express my sincere gratitude and appreciation to my supervisor and co-supervisor for
their continuous support, generous guidance, patience and encouragement in the
duration of the thesis preparation until its completion.
I would also like to express my special thanks of gratitude to my project’s
supervisor Prof Dr Wirachman Wisnoe as well as to my co-supervisor Puan Zurriati
Mohd Ali who gave me the golden opportunity to do this great project and also for their
continuous support, generous guidance, patience and encouragement in the duration of
the thesis preparation until its completion.
Last but not least, I also like to express my sincere gratitude and appreciation to
my friends who helped me a lot when I am in difficulties in finishing this project. A
million thanks to all who involved in this project. Thank you very much and may Allah
bless all of you and repay your kindness.

iii
ABSTRACT
This thesis represented the study on aerodynamic of a Blended Wing Body
(BWB) with canard aspect ratio of 8 for various canard angle of deflection at angle of
attack 10° by using Computational Fluid Dynamics (CFD) software. The objectives of
this project are to obtain the aerodynamics characteristic such as lift (CL), drag (CD), and
pitching moment coefficient (CM); to analyze the result obtained through CFD
simulation and to acquire the CFD visualization of pressure and Mach contour. The
CAD design of BWB is obtained from the previous research and the design is modified
with a rectangular canard placed in front of the main wing. The CAD format file is
converted to parasolid format for it to be readable by NUMECA software. Generally,
there are three stages of processes in NUMECA: pre-processing, processing and post-
processing. In NUMECA, Fine Hexpress is used as the mesher to acquire the appropriate
mesh quality. Then, it use a solver for the CFD simulation process known as Fine Hexa
by using Spalart-Allmaras turbulence model. The results are analyse by using CFView
in order to obtain the pressure and Mach contour.
iv
TABLE OF CONTENT
Contents
Page Title i
ACKNOWLEDGEMENT ii
ABSTRACT iii
TABLE OF CONTENT iv
LIST OF TABLES vii
LIST OF FIGURES ix
LIST OF ABBREVIATIONS xii
1. INTRODUCTION 1
1.1 Project Title 1
1.2 Project Background 2
1.3 Problem Statement 4
1.4 Objectives of Project 4
1.5 Significance of Project 4
1.6 Scope of Work 5

v
1.7 Methodology 6
2. LITERATURE REVIEW 9
2.1 AERODYNAMICS ANALYSIS 9
2.2 CANARD 12
2.3 BLENDED WING BODY 12
2.4 ASPECT RATIO 14
2.5 MACH NUMBER 15
3. PARAMETER VALIDATION 16
3.1 Selection of Object 18
3.2 Computer Aided Design (CAD) Drawing 18
3.3 Computational Fluid Dynamics (CFD) Simulation 19
3.4 Summary 30
4. GRID SENSITIVITY STUDY 36
4.1 BWB Baseline-II E5 CAD Drawing 38
4.2 CFD Analysis with Variation of Grid Sensitivity 38
4.2.1 Initial Parameters 38
4.2.2 Grid Sensitivity Analysis 41
4.3 Final Parameter Settings 52
4.3.1 Box 52
4.3.2 Faceting 52
4.3.3 Initial Mesh 53
4.3.4 Number of Refinement 53
5. RESULT AND DISCUSSION 54
5.1 Aerodynamic Analysis for BWB Baseline-II E5-8 55
5.1.1 Result of BWB Baseline-II E5-8 CFD Simulation 55
vi
5.1.2 Coefficient of Lift, CL 56
5.1.3 Coefficient of Drag, CD 62
5.1.4 Coefficient of Pitching Moment, CM 64
5.1.5 Pressure Distribution 65
6.0 CONCLUSION AND RECOMMENDATION 67
6.1 Conclusion 68
6.2 Recommendation 68
7.0 REFERENCES 69
APPENDICES 72
APPENDIX A – CAD Drawing of BWB Baseline II E5-8 72
APPENDIX B – Velocity Vectors Flow Visualization 73
APPENDIX B1 – Velocity Vectors Flow Visualization 75
vii
LIST OF TABLES
TABLE TITLE PAGE
Table 3.1 Test condition for surrounding 26
Table 3.2 Test condition for BWB Baseline-II E2 27
Table 3.3 Wind tunnel and Numeca Data 30
Table 4.1 Box parameter 39
Table 4.2 Faceting parameter 39
Table 4.3 Initial mesh parameter 40
Table 4.4 Surrounding Condition 40
Table 4.5 BWB Baseline-II E5 Condition 40
Table 4.6 Variation of box 41
Table 4.7 Minimum length parameter 43
Table 4.8 Curve and Surface Tolerance parameter 45
Table 4.9 Curve Resolution parameter 46
Table 4.10 Surface Resolution parameter 48
Table 4.11 Initial Mesh parameter 49
Table 4.12 Types of Initial Mesh 49
Table 4.13 Number of Refinement parameter 50
Table 4.14 Box parameter 52

viii
Table 4.15 Faceting parameter 52
Table 4.16 Initial Mesh parameter 53
Table 4.17 Number of Refinement parameter 53
Table 5.1 Table of results for BWB Baseline-II E5-8 55
ix
LIST OF FIGURES
FIGURE TITLE PAGE
Figure 1.1 Motion of Aircraft about its Axes [6] 3
Figure 1.2 BWB-Baseline II E5 [5] 3
Figure 2.1 Aircraft Motion [17] 10
Figure 2.2 Forces in Aircraft [18] 11
Figure 2.3 BWB Baseline-I 13
Figure 2.4 BWB Baseline-II 13
Figure 2.5 BWB Baseline-II E2 without canard 13
Figure 2.6 Evolution of BWB in UiTM 14
Figure 3.1 BWB Baseline-II E2 [16] 18
Figure 3.2 Box size parameters 19
Figure 3.3 Position of BWB in the box. 19
Figure 3.4 Box with a hole of BWB Baseline-II E2 after subtracted 20
Figure 3.5 Domain Setting 20
Figure 3.6 BWB Baseline-II E2 with domain 20
Figure 3.7 Boundary Conditions Set up 21
Figure 3.8 Boundary conditions setting 21
Figure 3.9 Initial Mesh setting 22

x
Figure 3.10 Global Paramaters under Mesh Adaptation 22
Figure 3.11 Surface Adaptation for local refinement number 23
Figure 3.12 Viscous layers setting 23
Figure 3.13 Finished mesh of BWB 24
Figure 3.14 Total number of cells 24
Figure 3.15 General properties setting 25
Figure 3.16: Fluid model setting. 25
Figure 3.17: Flow model parameters 26
Figure 3.18 Boundary conditions setting (solid) 27
Figure 3.19 Boundary conditions setting (external) 27
Figure 3.20 Initial solution setting. 28
Figure 3.21 Outputs setting. 29
Figure 3.22 Lift Coefficient, CL vs Angle of Attack, α 33
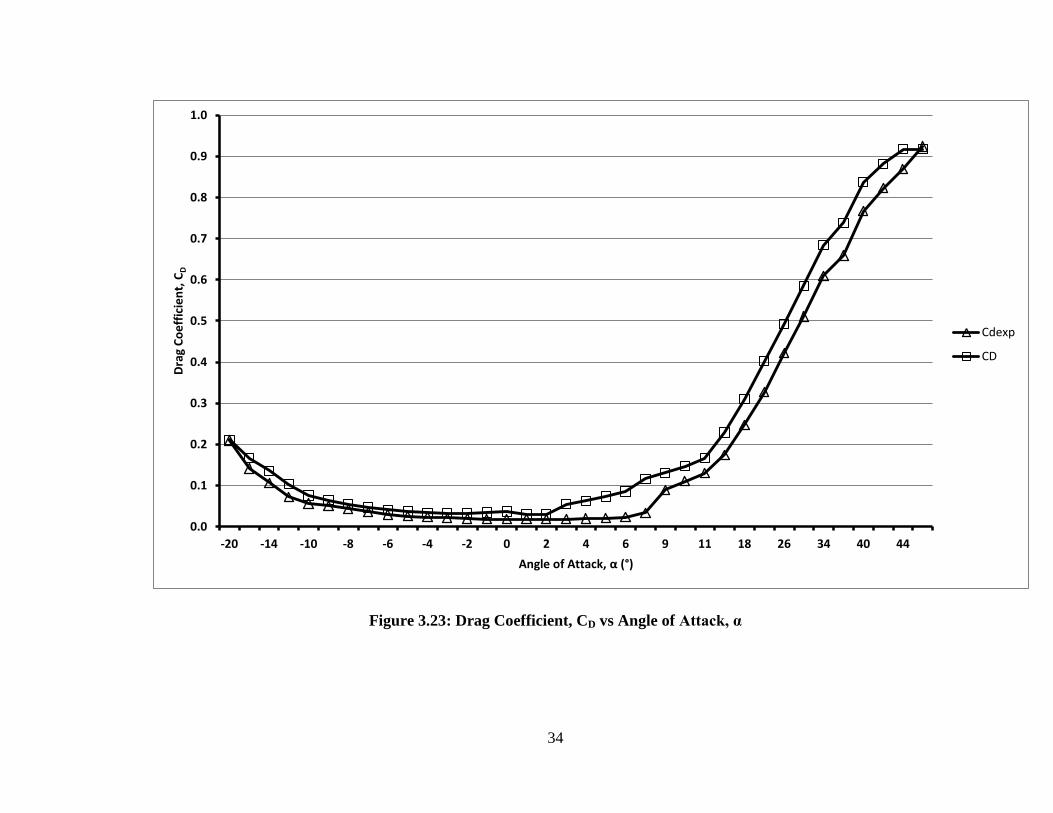
Figure 3.23: Drag Coefficient, CD vs Angle of Attack, α 34
Figure 4.1 L/D Ratio vs No of Cells (Box) 42
Figure 4.2 L/D Ratio vs Number of Cells (Min Length) 44
Figure 4.3 L/D Ratio vs Tolerance 45
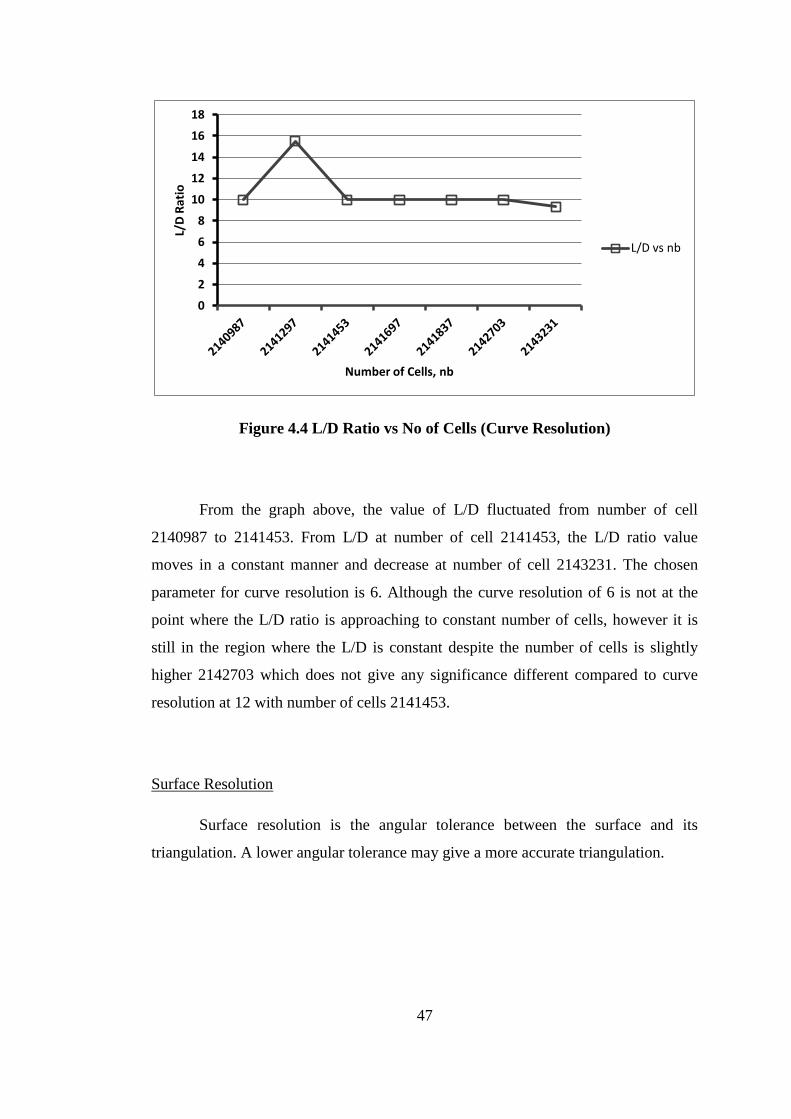
Figure 4.4 L/D Ratio vs No of Cells (Curve Resolution) 47
Figure 4.5 L/D Ratio vs No of Cells (Surface Resolution) 48
Figure 4.6 L/D Ratio vs No of Cells (Initial Mesh) 50
Figure 4.7 L/D Ratio vs No of Cells (No of Refinement) 51
Figure 5.1 Lift Coefficient, CL versus Canard Setting Angle, δ 56
Figure 5.2 Mach number at δ = -11°, upper surface 57
Figure 5.3 Mach number at δ = -11°, bottom surface 57
Figure 5.4 Canard’s velocity vector at δ = -11° 58
Figure 5.5 Mach number contour at δ = -3°, upper surface 59
Figure 5.6 Mach number contour at δ = -3°,bottom surface 59
Figure 5.7 Canard’s velocity vectors at δ = -3° 60
Figure 5.8 Mach number contour at δ = 3°, upper surface 61
Figure 5.9 Mach number contour at δ = 3°, bottom surface 61
Figure 5.10 Canard’s velocity vectors at δ = 3° 62

xi
Figure 5.11 Drag Coefficient, CD versus Canard Setting Angle, δ 63
Figure 5.12 Pitching Moment Coefficient, CM versus Canard Setting Angle, δ 64
Figure 5.13 Pressure contours at δ = -11° for upper (left) and lower (right) surfaces 65
Figure 5.14 Pressure contours at δ = -5° for upper (left) and lower (right) surfaces 65
Figure 5.15 Pressure contours at δ = -3° for upper (left) and lower (right) surfaces 65
Figure 5.16 Pressure contours at δ = 3° for upper (left) and lower (right) surfaces 66
xii
LIST OF ABBREVIATIONS
Re Reynold Number
AR Aspect ratio
Ma Mach number
V speed of flow
ρ density
c chord
s span
F force
CL lift coefficient
CD drag coefficient
CM pitching moment coefficient
δ canard setting angle, degree
α angle of attack, degree
1
CHAPTER I
1. INTRODUCTION
1.1 Project Title
The Aerodynamic Analysis of BWB Baseline II E5-8 UAV with Canard Aspect
Ratio (AR) of 8 at Angle of Attack of 10 degree at 0.1 Mach Number through CFD
Simulation at Different Canard Setting Angles.

2
1.2 Project Background
In aircraft, there are two motions that are involve which are translational and
rotational motion. The translational motion is the relative linear position from the origin.
Rotational motion relates to the orientation of the body which consists of yawing,
pitching and rolling [1]. These motions are influenced by the control surfaces; ailerons
(rolling), elevator (pitching) and rudder (yawing) [2]. The pitching motion or
longitudinal motion is influenced by the elevator or canard [3]. Canard is a longitudinal
stabilizer located ahead of the main wing, on the fuselage. There are three types of
canard; lifting canard, control canard and couple canard. However, this project will
focus on control canard. Control canard provides the same function as the aft horizontal
stabilizer by introducing a moment that changes the angle of attack of fuselage and main
wing [4].
From the previous aerodynamics analysis data obtained, the BWB-Baseline II
shows a better result rather than Baseline-I, therefore UITM has continued their study on
Baseline-II until now which is BWB Baseline-II E5 [5]. The BWB-Baseline II E5-8 will
use a rectangular canard as a secondary wing and the primary wing tip will be twisted a
little. The aerodynamics analysis data in this project will be obtained using CFD.

3
Figure 1.2 BWB-Baseline II E5 [5]
Canard
Twisted wing
Figure 1.1 Motion of Aircraft about its Axes [6]

4
1.3 Problem Statement
There are a few setbacks in this project since the data is not available for the
aerodynamic analysis (lift coefficient CL, drag coefficient CD, and pitching moment
coefficient CM) of the BWB Baseline II E5-8. Furthermore, this project is a new research
to study the effect of a rectangular canard on the BWB Baseline II E5.
1.4 Objectives of Project
This project consists of several objectives which are:
1. To obtain lift, drag and pitching moment coefficient.
2. To analyze the result obtained through the CFD simulation.
3. To obtain CFD visualization: pressure and Mach countour, velocity vectors.
1.5 Significance of Project
The significance of this project is obtaining the aerodynamics data for BWB-
Baseline II E5-8 for analyzing the aerodynamic characteristics. Furthermore, the result
from this project can also be included in the database for BWB-Baseline II E5-8.

5
1.6 Scope of Work
This project consists of several scopes of work which are:
1. Model to be used: BWB-Baseline II E5-8
2. Type of Canard to be used: Rectangular Canard with Aspect Ratio (AR) 8
[Area = 0.36 m2]
3. Canard setting angle : -22° to 8°
4. Mach Number 0.1
5. CFD simulation
6. Turbulence models to be use : Spalart-Allmaras turbulence model

6
1.7 Methodology
GRID SENSITIVITY STUDY
PARAMETER VALIDATION
START
Literature review
YES
Obtain BWB-Baseline II E5-8
CAD Drawing
CFD Analysis with variation
of grid sensitivity, N
Independence
achieved?
NO
YES
Model Selection
CAD Drawing
CFD Simulation
Data
Validate
?
Reference from
journals/article
NO
7
BWB –BASELINE II E5-8 CFD
ANALYSIS
Turbulence Model:
Spalart-Allmaras
Result Analysis
END

8
Literature Review
To gain basic knowledge on aerodynamic analysis, canard, Blended Wing Body
(BWB) and previous research on books and journals that may help to develop the
project. Literature review will be done throughout the project.
Parameter Validation
Search for any suitable flying model such as wing blade or aerofoil. Then, draw
the model in CAD drawing and do CFD simulation. Next, is to validate the data obtained
from the simulation with the data from the reference journals and books. If the obtained
data is inaccurate with the data from the references, repeat the CFD simulation.
Grid Independence Study
The CAD drawing for BWB-Baseline II E5-8 and rectangular canard with aspect
ratio of 8 are obtained. The model for BWB-Baseline II E5-8 is the half model of the
structure which is to reduce the simulation time by reducing the computer’s memory and
saving time in modeling. Next, the CAD drawing is transferred to CFD to generate
meshing. The analysis will be done by using different meshing sizes to test the L/D ratio.
This process will continue until the L/D ratio approach to constant at certain
no of grid, N.
BWB –Baseline II E5-8 CFD Analysis
Then, the process is continued for the aerodynamic analysis section. Spalart-
Allmaras will be use as the turbulence model at the angle of attack 10° with different
canard setting angles from δ = -22° to δ = 8°. The result will be obtained through the
CFD simulation and graph will be plot where the CL, CD, and CM versus the different
canard setting angle at angle of attack 10°. Then, by using the CFView, we can get the
pressure and Mach contour and also velocity vectors. The data from the CFD simulation
will be analyze and the result will be discussed together with the velocity vectors,
pressure and Mach contour.
9
CHAPTER II
2. LITERATURE REVIEW
2.1 AERODYNAMICS ANALYSIS
2.1.1 Aircraft motion
Aircraft consist of three motions which are pitching, rolling and yawing motions
about the center of gravity of the aircraft. Pitching motion is the movement of the
aircraft about its pitch axis. This longitudinal motion is influenced by the elevator and/or
canard which act as its control surface. Rolling and yawing motions are the movement
about its roll and yaw axes respectively. Ailerons are the control surface that influenced
the rolling motion of the aircraft while rudder is the control surface for yawing motion.

10
Figure 2.1 Aircraft Motion [17]
11
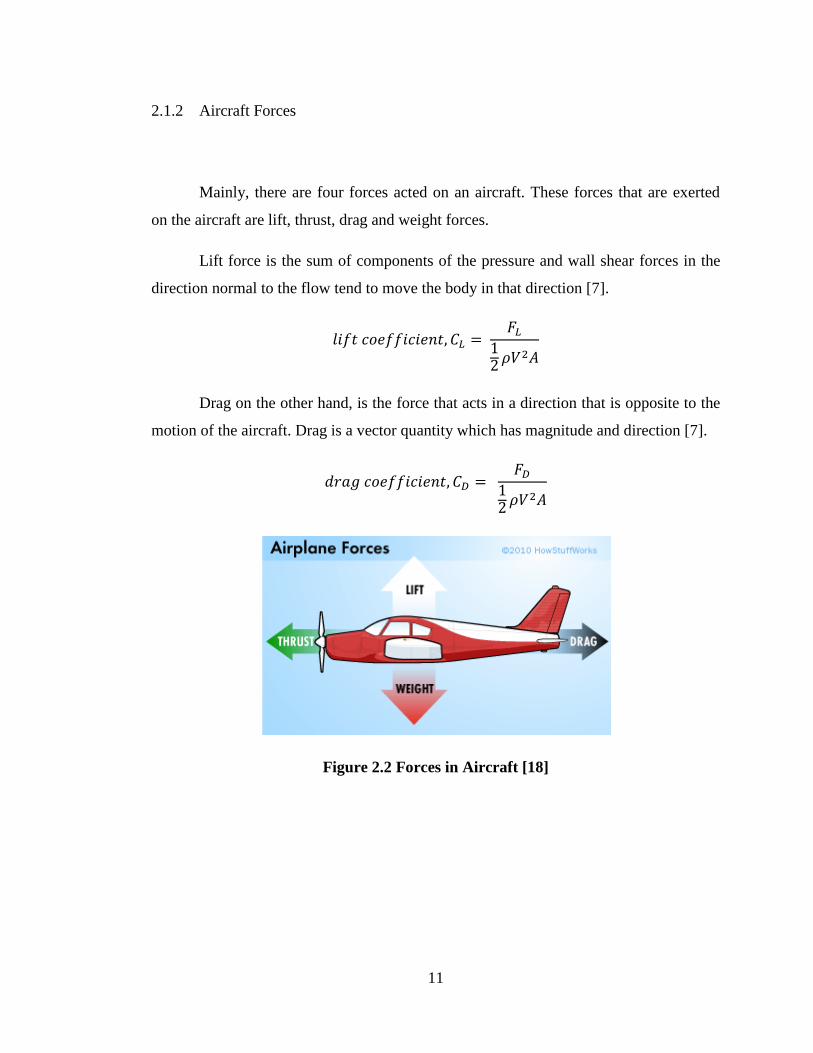
2.1.2 Aircraft Forces
Mainly, there are four forces acted on an aircraft. These forces that are exerted
on the aircraft are lift, thrust, drag and weight forces.
Lift force is the sum of components of the pressure and wall shear forces in the
direction normal to the flow tend to move the body in that direction [7].
Drag on the other hand, is the force that acts in a direction that is opposite to the
motion of the aircraft. Drag is a vector quantity which has magnitude and direction [7].
Figure 2.2 Forces in Aircraft [18]
12
2.2 CANARD
Canard is a longitudinal stabilizer which is located ahead of the primary wing
and on the fuselage [8]. For high performance aircraft, canard-wing configuration is
often required for this type of aircraft design which it need to provide high lift for wide
range of angles of attack in order for it to be maneuverable [9]. There are three types of
canard which are control canard, lifting canard and couple canard. Control canard will
be use in this project which act as the secondary wing and it provide the same function
as the front horizontal stabilizer by introducing a moment that changes the angle of
attack of the fuselage as well as the main wing [10].
2.3 BLENDED WING BODY
Blended Wing Body (BWB) is a concept which was introduced by
Liebeck et. al [11]. Blended Wing Body is a concept where the fuselage and wing is
combined together to form a single body [12]. BWB is a hybrid of flying-wing aircraft
and the conventional aircraft where the body is designed to have a shape of an airfoil
and carefully streamlined with the wing to have a desired planform [13].
2.2.1 History of BWB in UiTM
In University of Technology MARA (UiTM), the research on Blended Wing
Body has been started since 2005. The UiTM’s BWB has been classified as a mini UAV
(Unmanned Aerial Vehicle). There are many types of BWB which are developed by
UiTM for research purposes which are BWB Baseline-I and BWB Baseline-II. BWB
Baseline-I is designed with an elevator for pitching motion. BWB Baseline-II

13
completely revised version from BWB Baseline-I. It has a simpler planform, broader
chord wing and slimmer body compared to BWB Baseline-I. BWB Baseline-II E2
without canard has a slight modification where part of the wing is twisted down at
certain angle [5][14].
Figure 2.3 BWB Baseline-I
Figure 2.4 BWB Baseline-II
Figure 2.5 BWB Baseline-II E2 without canard
14
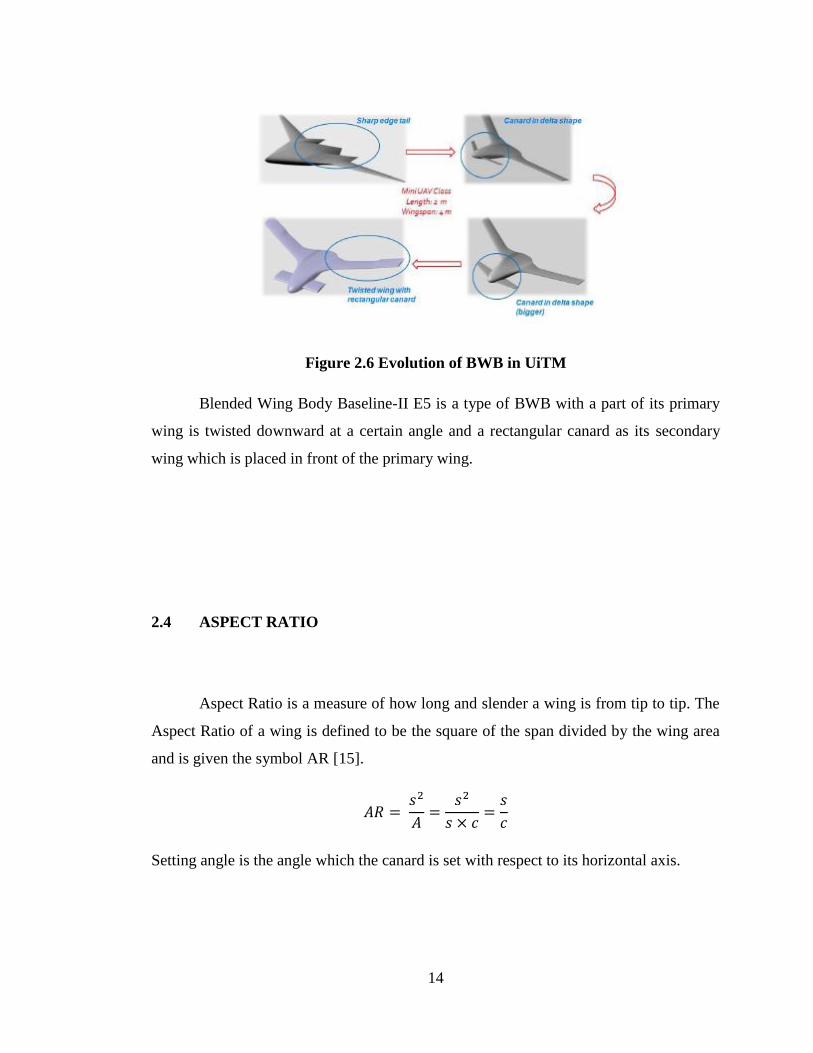
Figure 2.6 Evolution of BWB in UiTM
Blended Wing Body Baseline-II E5 is a type of BWB with a part of its primary
wing is twisted downward at a certain angle and a rectangular canard as its secondary
wing which is placed in front of the primary wing.
2.4 ASPECT RATIO
Aspect Ratio is a measure of how long and slender a wing is from tip to tip. The
Aspect Ratio of a wing is defined to be the square of the span divided by the wing area
and is given the symbol AR [15].
Setting angle is the angle which the canard is set with respect to its horizontal axis.

15
2.5 MACH NUMBER
Where c = 346 m/s in air at room temperature at sea level.
A flow is called sonic when Ma = 1, subsonic when Ma < 1, supersonic Ma > 1 and
hypersonic when Ma >> 1.

16
CHAPTER III
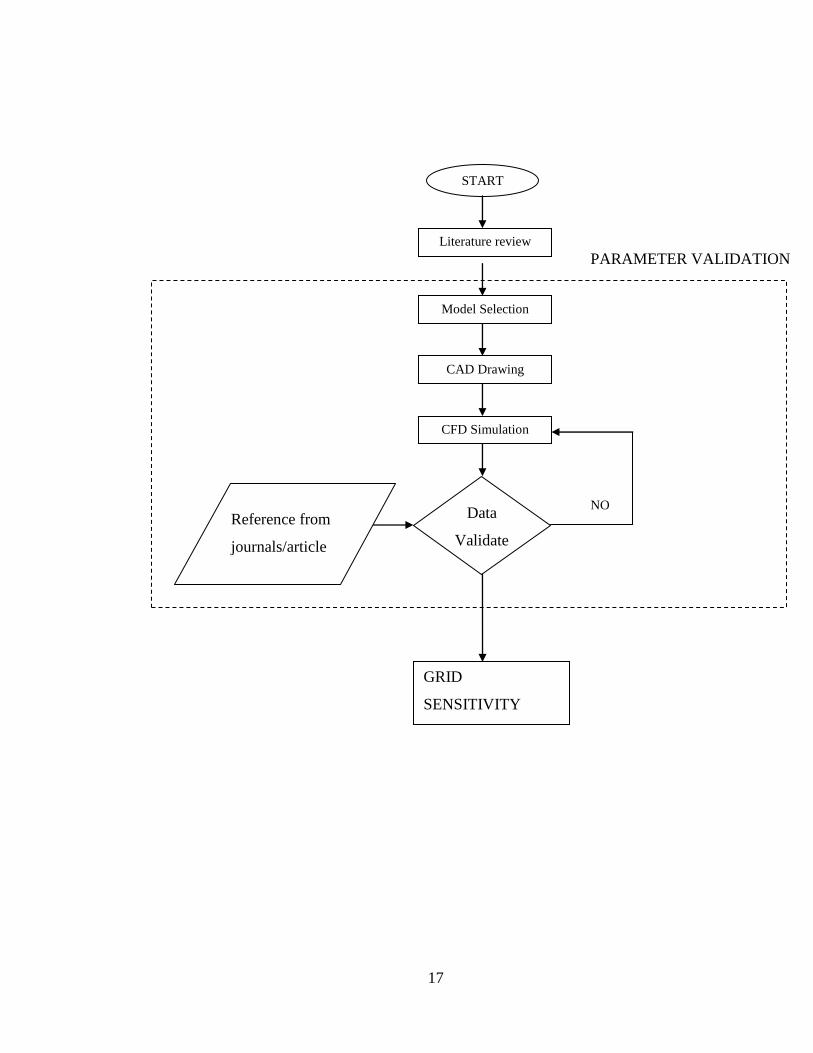
3. PARAMETER VALIDATION
In this chapter, Parameter Validation will be discussed briefly. Parameter
Validation is a process of running a simulation on a selected object with the valid data as
reference from journals. The data that are obtained from the simulation will be compared
to the data in the journal. The main idea of this stage is to obtain the values of lift
coefficient (CL), drag coefficient (CD) and pitching moment (CM) (any which that are
provided in the journal) that is as near as possible to the data from the referred journal.
17
GRID
SENSITIVITY
PARAMETER VALIDATION
START
Literature review
Model Selection
CAD Drawing
CFD Simulation
Data
Validate
?
Reference from
journals/article
NO
18
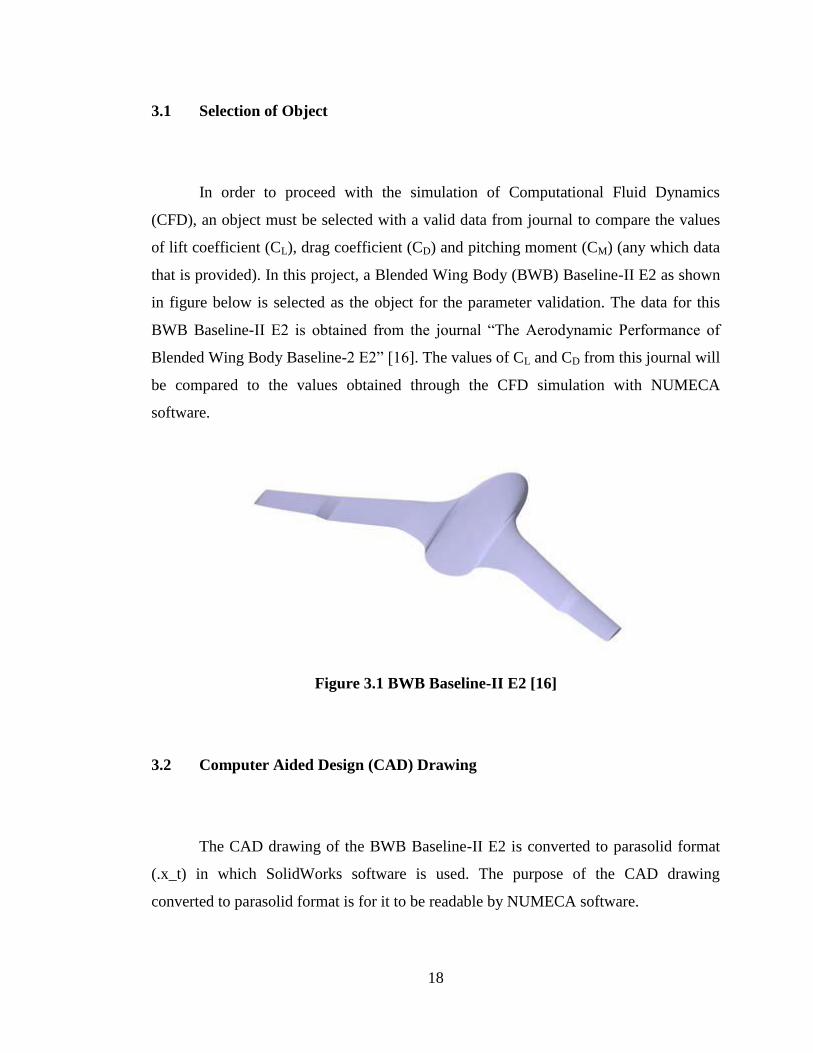
3.1 Selection of Object
In order to proceed with the simulation of Computational Fluid Dynamics
(CFD), an object must be selected with a valid data from journal to compare the values
of lift coefficient (CL), drag coefficient (CD) and pitching moment (CM) (any which data
that is provided). In this project, a Blended Wing Body (BWB) Baseline-II E2 as shown
in figure below is selected as the object for the parameter validation. The data for this
BWB Baseline-II E2 is obtained from the journal “The Aerodynamic Performance of
Blended Wing Body Baseline-2 E2” [16]. The values of CL and CD from this journal will
be compared to the values obtained through the CFD simulation with NUMECA
software.
Figure 3.1 BWB Baseline-II E2 [16]
3.2 Computer Aided Design (CAD) Drawing
The CAD drawing of the BWB Baseline-II E2 is converted to parasolid format
(.x_t) in which SolidWorks software is used. The purpose of the CAD drawing
converted to parasolid format is for it to be readable by NUMECA software.
19
3.3 Computational Fluid Dynamics (CFD) Simulation
The Computational Fluid Dynamics (CFD) Simulation will be done by using
NUMECA Software.
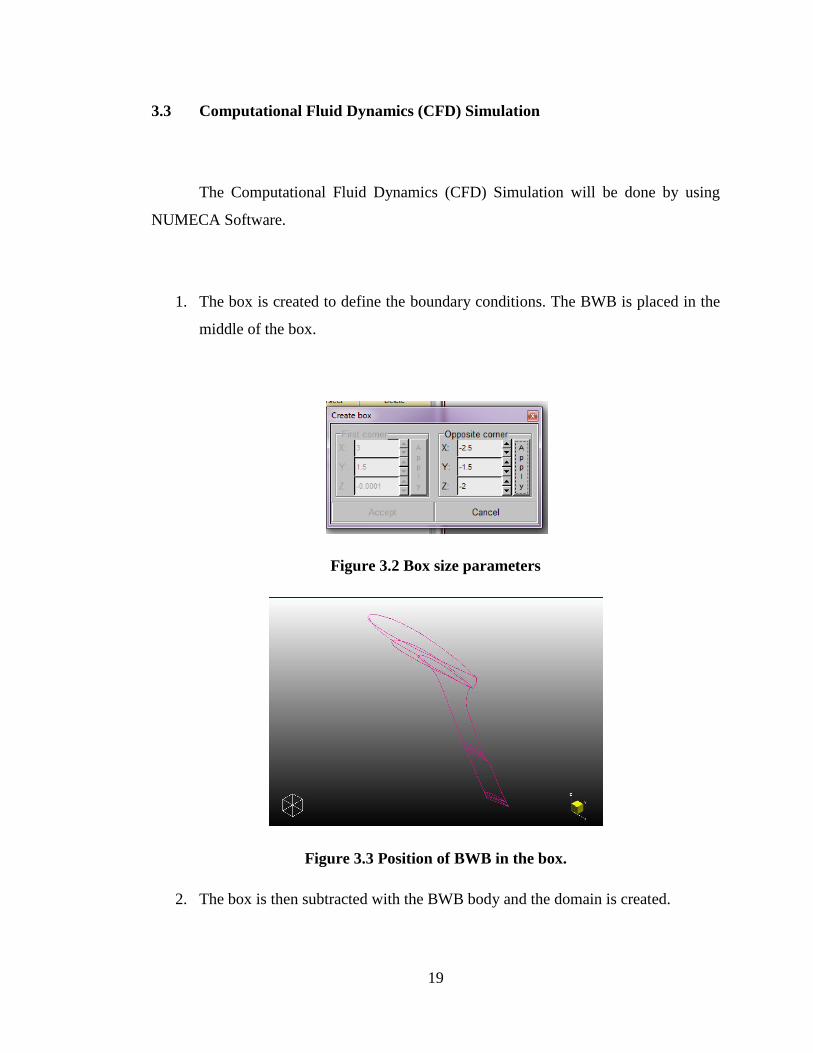
1. The box is created to define the boundary conditions. The BWB is placed in the
middle of the box.
Figure 3.2 Box size parameters
Figure 3.3 Position of BWB in the box.
2. The box is then subtracted with the BWB body and the domain is created.
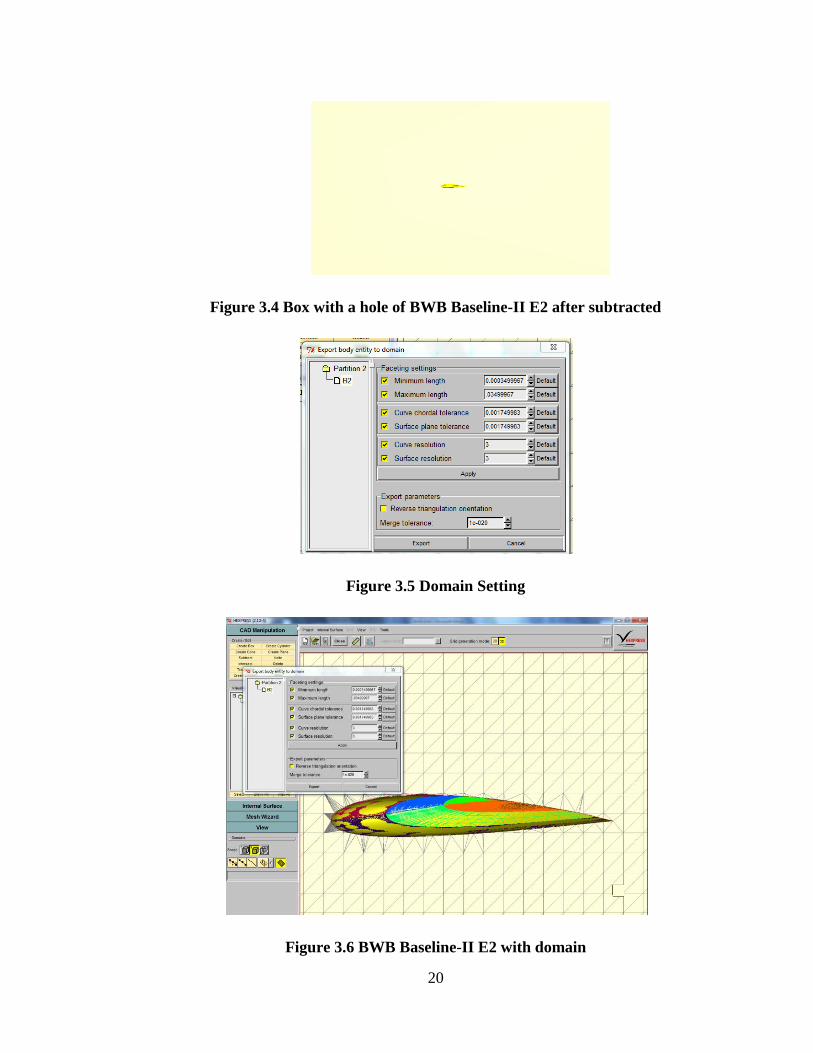
20
Figure 3.4 Box with a hole of BWB Baseline-II E2 after subtracted
Figure 3.5 Domain Setting
Figure 3.6 BWB Baseline-II E2 with domain
21
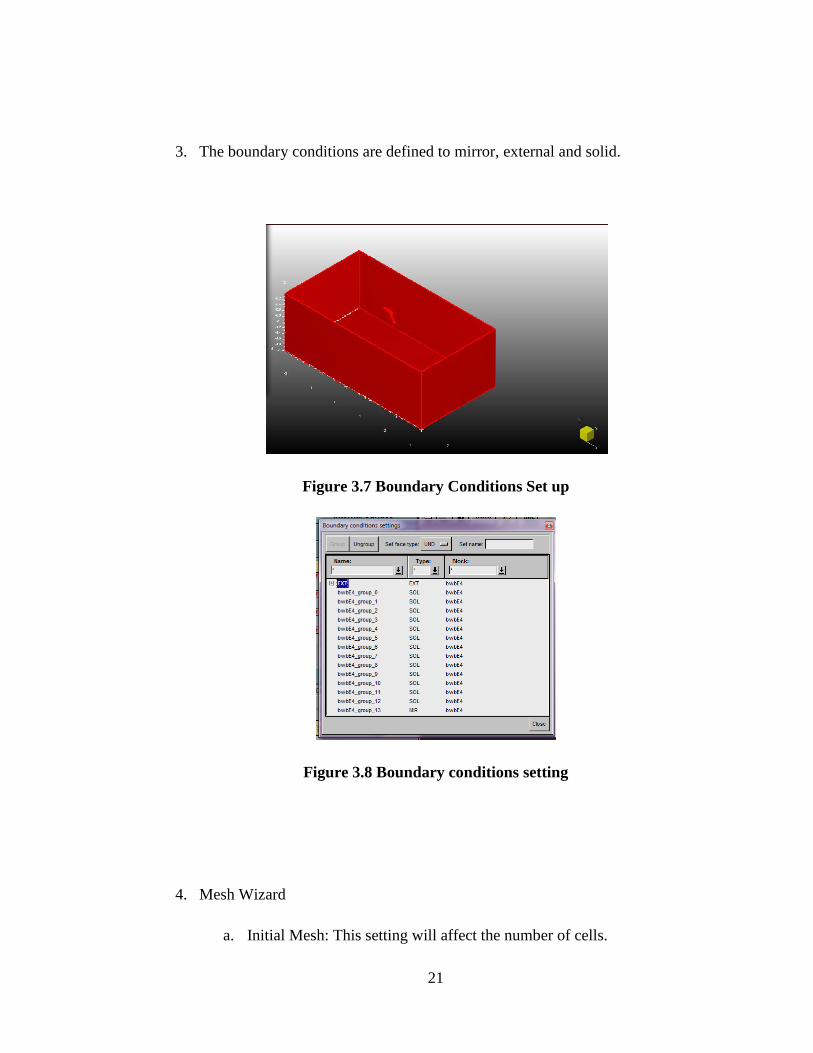
3. The boundary conditions are defined to mirror, external and solid.
Figure 3.7 Boundary Conditions Set up
Figure 3.8 Boundary conditions setting
4. Mesh Wizard
a. Initial Mesh: This setting will affect the number of cells.
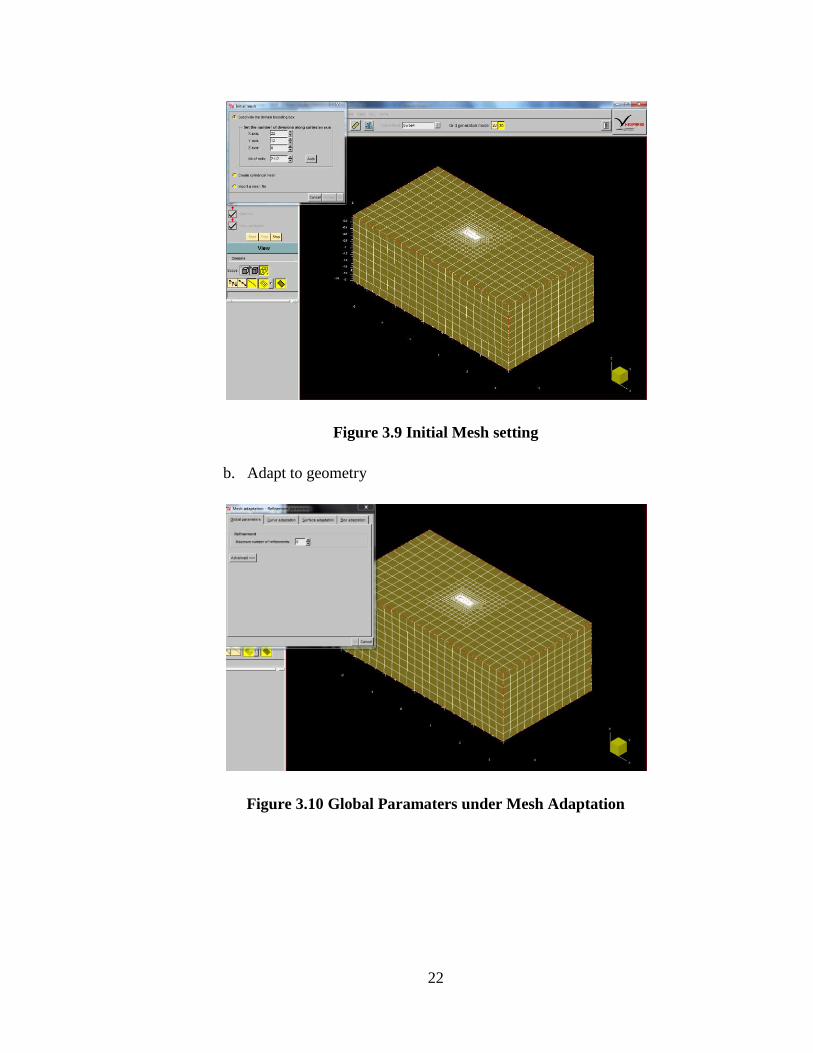
22
Figure 3.9 Initial Mesh setting
b. Adapt to geometry
Figure 3.10 Global Paramaters under Mesh Adaptation
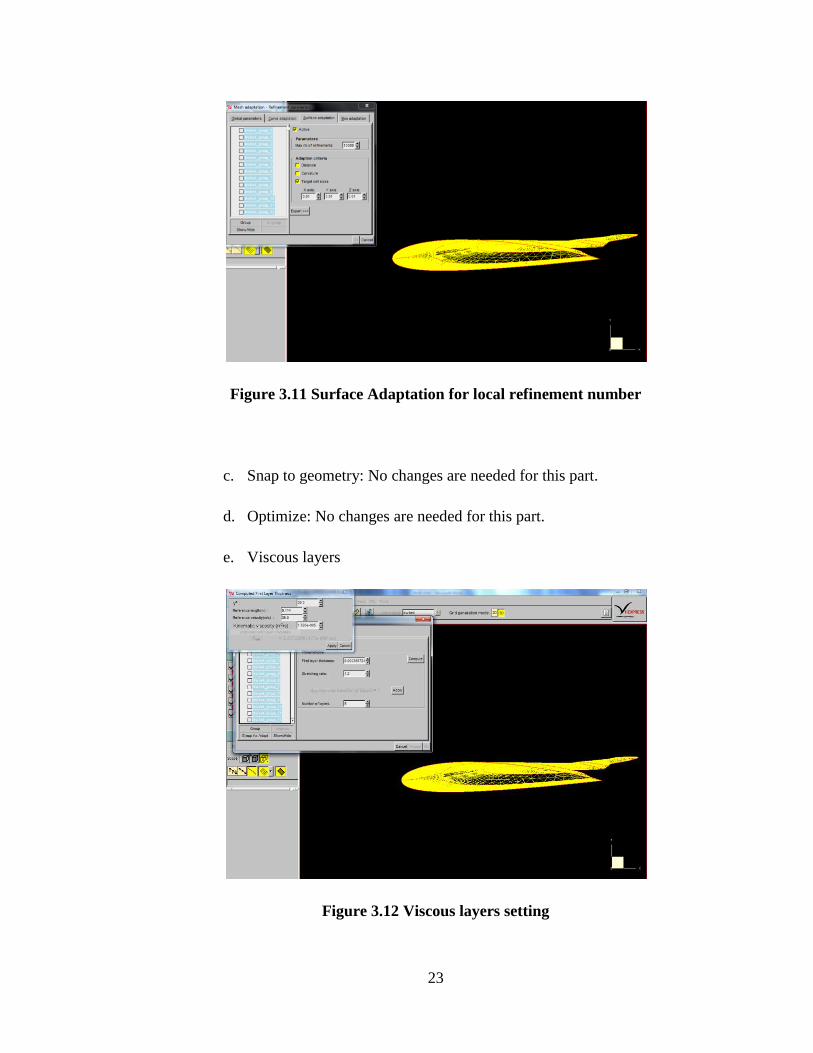
23
Figure 3.11 Surface Adaptation for local refinement number
c. Snap to geometry: No changes are needed for this part.
d. Optimize: No changes are needed for this part.
e. Viscous layers
Figure 3.12 Viscous layers setting

24
Figure 3.13 Finished mesh of BWB
Figure 3.14 Total number of cells
5. The meshing file is saved to .igg file. Meshing program need to be close first to
proceed to HEXSTREAM.
6. The mesh file is loaded automatic in computation program.
7. The general properties are set.
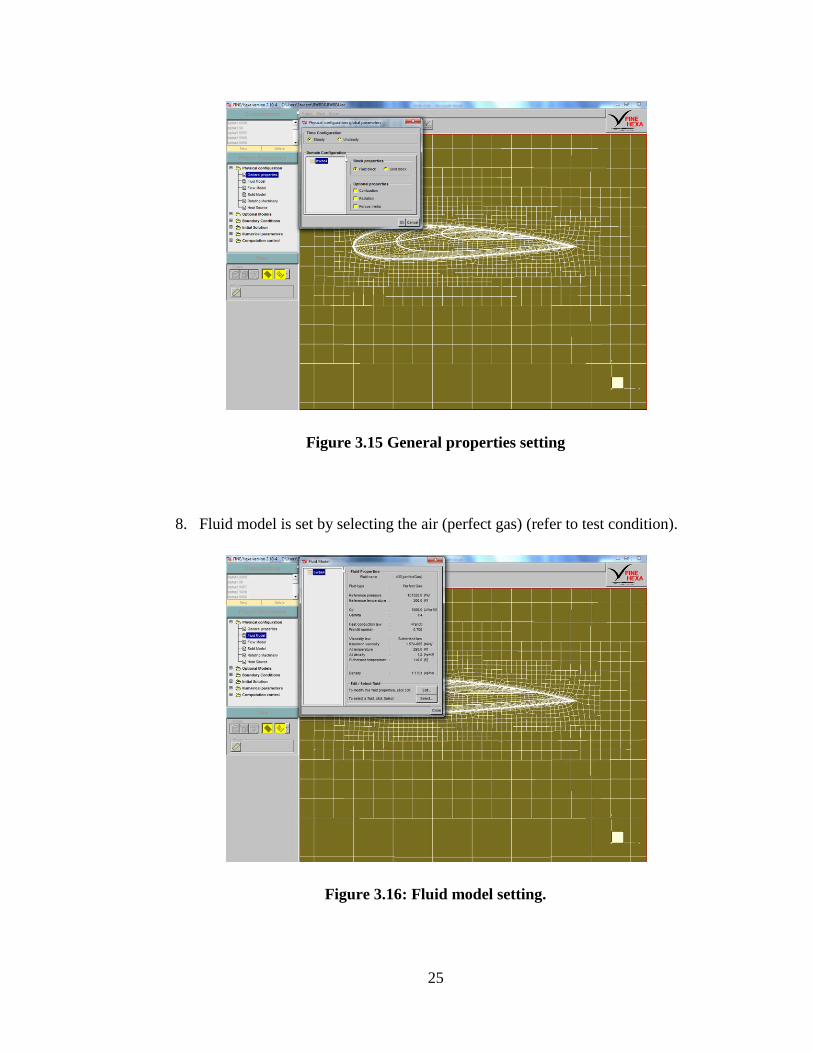
25
Figure 3.15 General properties setting
8. Fluid model is set by selecting the air (perfect gas) (refer to test condition).
Figure 3.16: Fluid model setting.

26
9. Flow model is set.
Figure 3.17: Flow model parameters
10. No changes are done in solid model, rotating machinery and heat source.
11. The boundary conditions are set according to the information given from
reference.
Table 3.1 Test condition for surrounding
Atmospheric pressure, Patm 100424 Pa
Air temperature, Tair 25°C / 298K (average)
Air density, ρair 1.165 kg/m3
Air kinematic viscosity, νair m2/s
Air velocity, Vair 35 m/s

27
Table 3.2 Test condition for BWB Baseline-II E2
Reference length, Lref 0.114 m
Reference area, Sref 0.03995 m2
Figure 3.18 Boundary conditions setting (solid)
Figure 3.19 Boundary conditions setting (external)
28
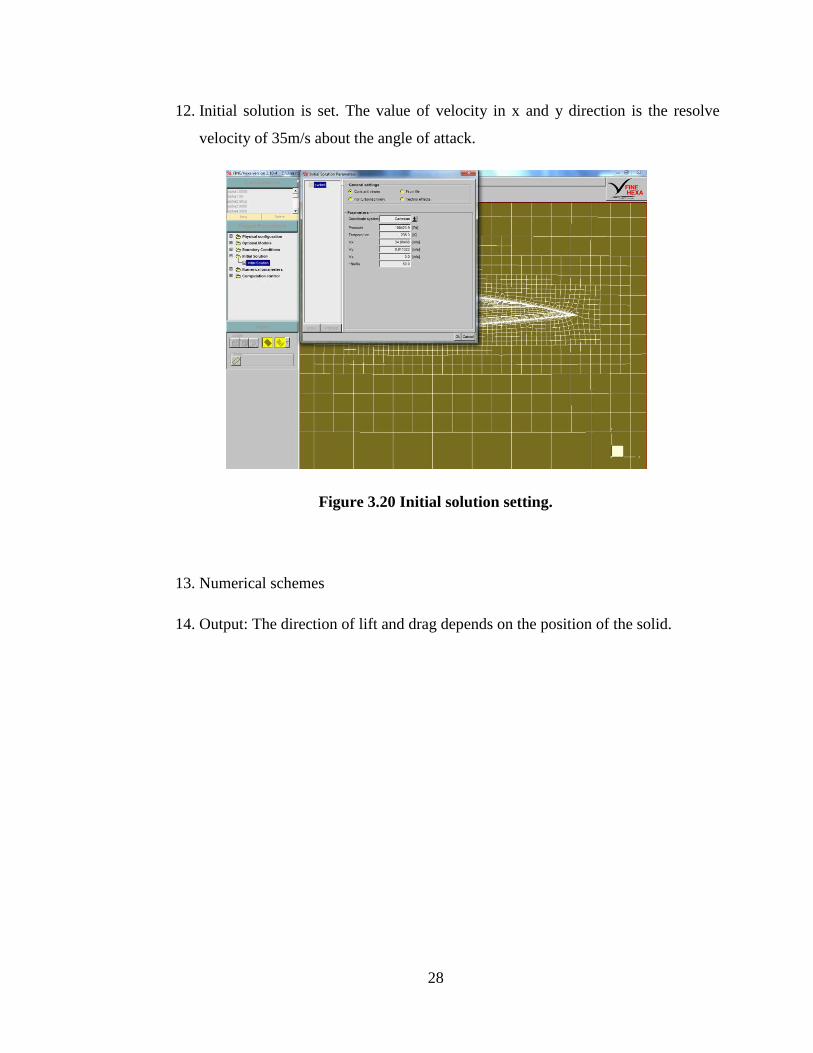
12. Initial solution is set. The value of velocity in x and y direction is the resolve
velocity of 35m/s about the angle of attack.
Figure 3.20 Initial solution setting.
13. Numerical schemes
14. Output: The direction of lift and drag depends on the position of the solid.
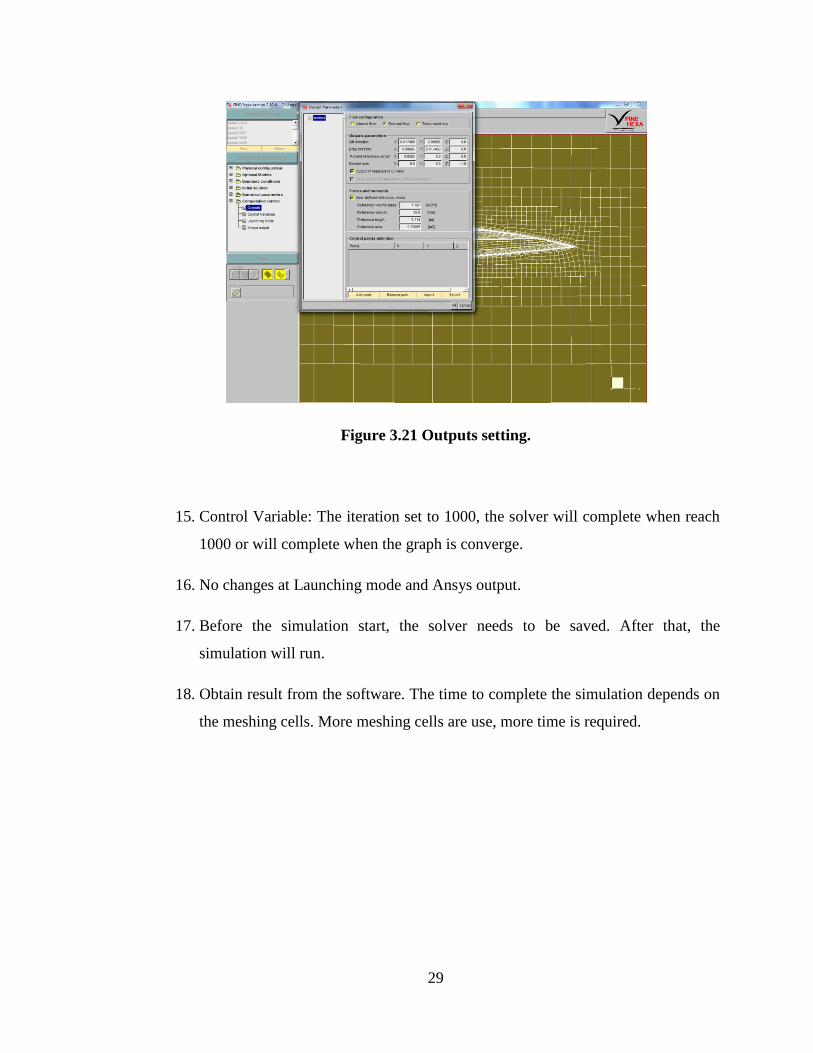
29
Figure 3.21 Outputs setting.
15. Control Variable: The iteration set to 1000, the solver will complete when reach
1000 or will complete when the graph is converge.
16. No changes at Launching mode and Ansys output.
17. Before the simulation start, the solver needs to be saved. After that, the
simulation will run.
18. Obtain result from the software. The time to complete the simulation depends on
the meshing cells. More meshing cells are use, more time is required.
30
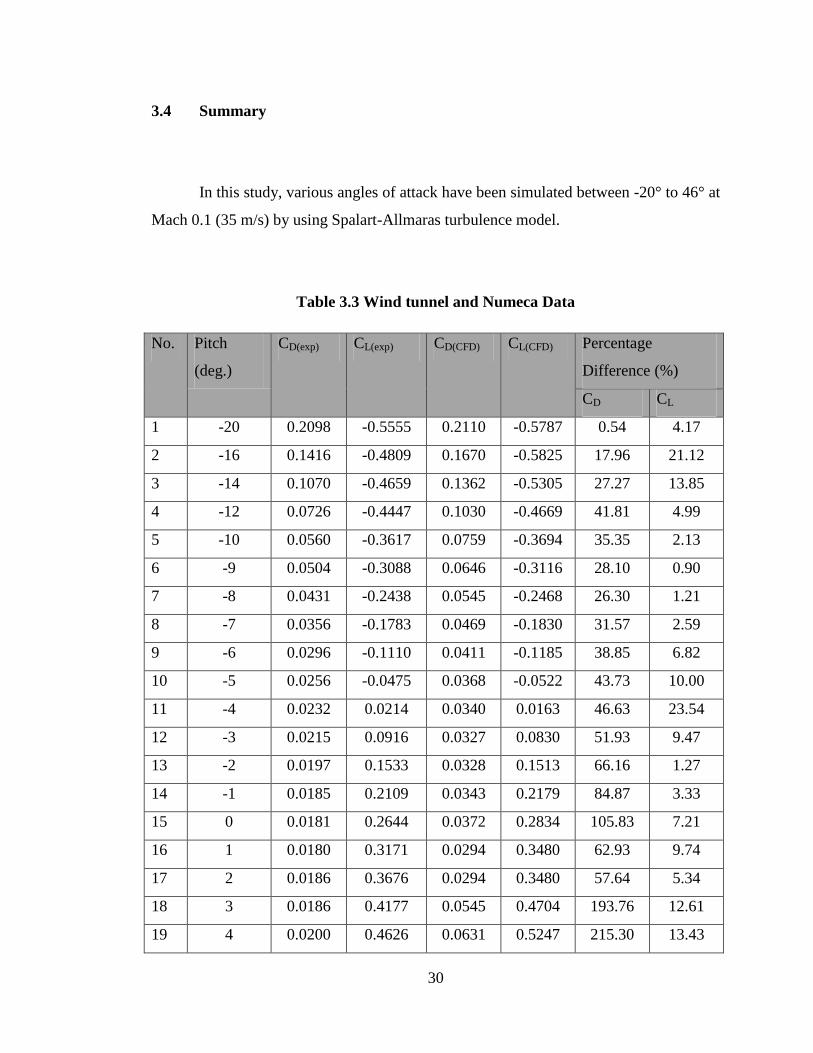
3.4 Summary
In this study, various angles of attack have been simulated between -20° to 46° at
Mach 0.1 (35 m/s) by using Spalart-Allmaras turbulence model.
Table 3.3 Wind tunnel and Numeca Data
No. Pitch
(deg.)
CD(exp) CL(exp) CD(CFD) CL(CFD) Percentage
Difference (%)
CD CL
1 -20 0.2098 -0.5555 0.2110 -0.5787 0.54 4.17
2 -16 0.1416 -0.4809 0.1670 -0.5825 17.96 21.12
3 -14 0.1070 -0.4659 0.1362 -0.5305 27.27 13.85
4 -12 0.0726 -0.4447 0.1030 -0.4669 41.81 4.99
5 -10 0.0560 -0.3617 0.0759 -0.3694 35.35 2.13
6 -9 0.0504 -0.3088 0.0646 -0.3116 28.10 0.90
7 -8 0.0431 -0.2438 0.0545 -0.2468 26.30 1.21
8 -7 0.0356 -0.1783 0.0469 -0.1830 31.57 2.59
9 -6 0.0296 -0.1110 0.0411 -0.1185 38.85 6.82
10 -5 0.0256 -0.0475 0.0368 -0.0522 43.73 10.00
11 -4 0.0232 0.0214 0.0340 0.0163 46.63 23.54
12 -3 0.0215 0.0916 0.0327 0.0830 51.93 9.47
13 -2 0.0197 0.1533 0.0328 0.1513 66.16 1.27
14 -1 0.0185 0.2109 0.0343 0.2179 84.87 3.33
15 0 0.0181 0.2644 0.0372 0.2834 105.83 7.21
16 1 0.0180 0.3171 0.0294 0.3480 62.93 9.74
17 2 0.0186 0.3676 0.0294 0.3480 57.64 5.34
18 3 0.0186 0.4177 0.0545 0.4704 193.76 12.61
19 4 0.0200 0.4626 0.0631 0.5247 215.30 13.43
31
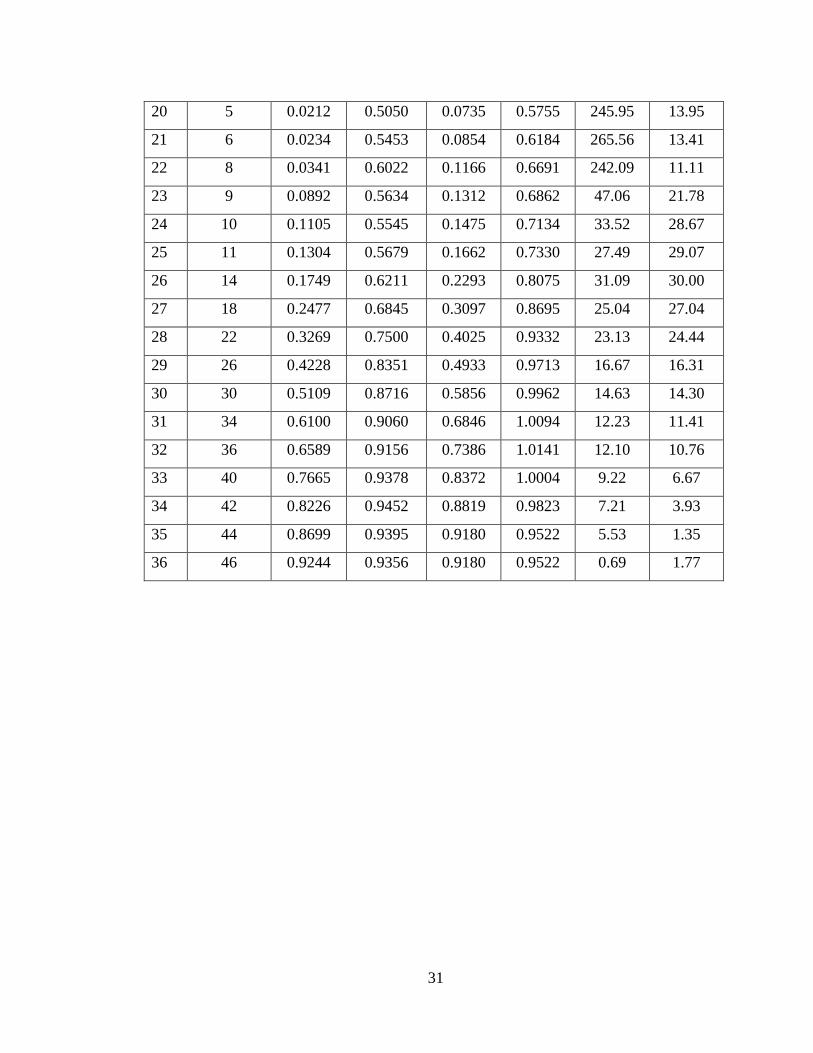
20 5 0.0212 0.5050 0.0735 0.5755 245.95 13.95
21 6 0.0234 0.5453 0.0854 0.6184 265.56 13.41
22 8 0.0341 0.6022 0.1166 0.6691 242.09 11.11
23 9 0.0892 0.5634 0.1312 0.6862 47.06 21.78
24 10 0.1105 0.5545 0.1475 0.7134 33.52 28.67
25 11 0.1304 0.5679 0.1662 0.7330 27.49 29.07
26 14 0.1749 0.6211 0.2293 0.8075 31.09 30.00
27 18 0.2477 0.6845 0.3097 0.8695 25.04 27.04
28 22 0.3269 0.7500 0.4025 0.9332 23.13 24.44
29 26 0.4228 0.8351 0.4933 0.9713 16.67 16.31
30 30 0.5109 0.8716 0.5856 0.9962 14.63 14.30
31 34 0.6100 0.9060 0.6846 1.0094 12.23 11.41
32 36 0.6589 0.9156 0.7386 1.0141 12.10 10.76
33 40 0.7665 0.9378 0.8372 1.0004 9.22 6.67
34 42 0.8226 0.9452 0.8819 0.9823 7.21 3.93
35 44 0.8699 0.9395 0.9180 0.9522 5.53 1.35
36 46 0.9244 0.9356 0.9180 0.9522 0.69 1.77

32
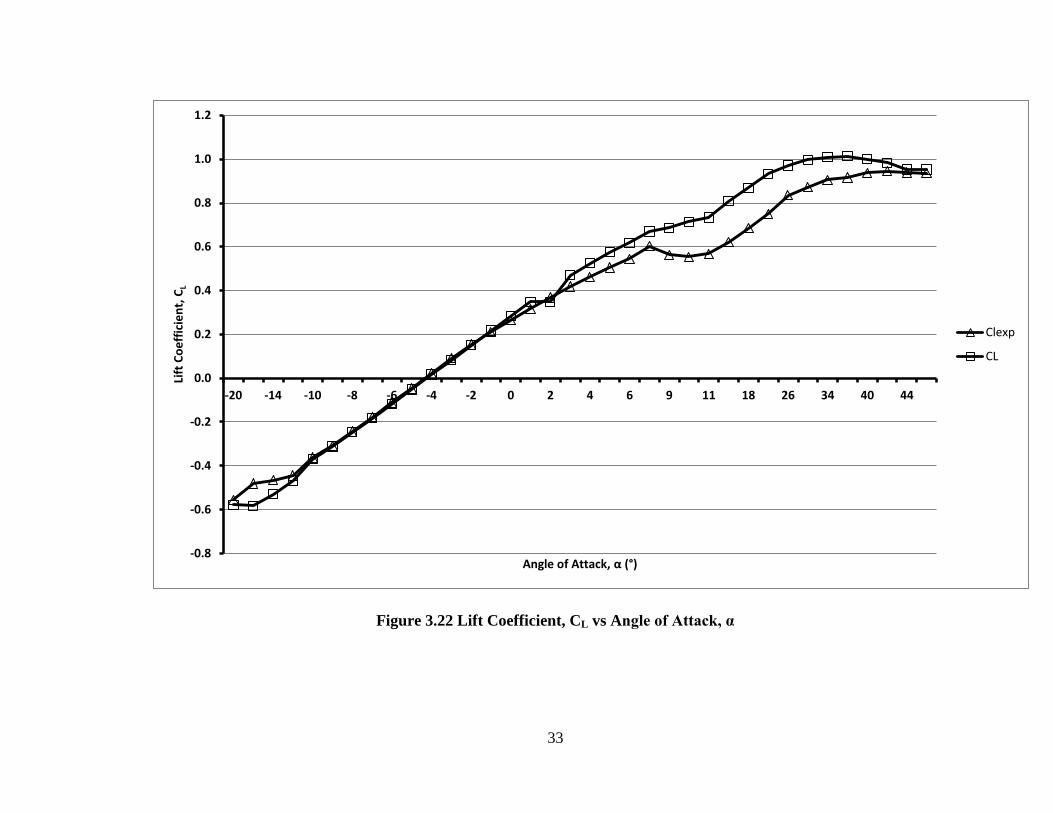
1. Lift Coefficient, CL analysis
From Figure 3.22, it shows the comparison result between CFD simulation and
experimental data for BWB Baseline-II E2. The lift curves show a trend that are similar
to the linear region (α = -10° to 8°) although at α = 2°, there is a slight drop since the
percentage of error at that specific angle of attack is 5.34% which is approaching the
experimental data. However, at α = 3° the percentage of error increased to 12.61% and it
continue to increase linearly till α = 8°. The graph has a curve that is slightly similar to
the experimental result. At α = 44° and 46°, the value of lift coefficient is nearly as the
experimental result with percentage of error 1.35% and 1.77% respectively.
2. Drag Coefficient, CD analysis
As shown in Figure 3.23, the graph of CFD simulation shows a trend
line that is roughly similar to the data obtained from wind tunnel test. The trend
line moves nearly to the experimental data. However, at α = 3°, the line moves
away from the experimental data with the increasing percentage of error. At
α = 9°, the line moves along the experimental data with a significant distance
separating them. The data from CFD simulation is almost the same with the
experimental data at α = 46° with its percentage of error 0.64%.
33
Figure 3.22 Lift Coefficient, CL vs Angle of Attack, α
-0.8
-0.6
-0.4
-0.2
0.0
0.2
0.4
0.6
0.8
1.0
1.2
-20 -14 -10 -8 -6 -4 -2 0 2 4 6 9 11 18 26 34 40 44
Lift
Co
eff
icie
nt,
CL
Angle of Attack, α (°)
Clexp
CL
34
Figure 3.23: Drag Coefficient, CD vs Angle of Attack, α
0.0
0.1
0.2
0.3
0.4
0.5
0.6
0.7
0.8
0.9
1.0
-20 -14 -10 -8 -6 -4 -2 0 2 4 6 9 11 18 26 34 40 44
Dra
g C
oe
ffic
ien
t, C
D
Angle of Attack, α (°)
Cdexp
CD
35
The investigation on aerodynamic characteristics data obtained from CFD
simulation and wind tunnel test, shows that the curve of the graph for both lift and
drag coefficient are slightly similar to each other although there is a signicant
percentage of error with 30% of error at α = 14° for lift coefficient and 265% of error
at α = 6° for drag coefficient. The smallest percentage of error for lift coefficient is
0.9% at α = -9° as for drag coefficient, 0.54% of error at α = -20°.
36
CHAPTER IV
4. GRID SENSITIVITY STUDY
Proceeding from the Parameter Validation, the next chapter is to carry out the
Grid Sensitivity study. Grid Sensitivity study is the stage of obtaining the most
suitable parameter setting that will be use for the simulation using NUMECA. In
order to proceed with this stage, some parameters will be taken into account that will
be vary accordingly to obtain the most suitable parameter setting to be use for the
BWB Baseline-II E5-8 CFD Simulation purposes.

37
CFD Analysis with variation
of grid sensitivity
Independence
achieved?
NO
YES
GRID SENSITIVITY STUDY
STUDY
BWB Baseline-II E5-8
CFD Simulation
Parameter Validation
Obtain BWB-Baseline II E5-8
CAD Drawing
START
Literature review
38
4.1 BWB Baseline-II E5 CAD Drawing
The CAD drawing of the BWB Baseline-II E5 and rectangular canard with
aspect ratio of 8 will be obtained. However, in this chapter, only the drawing of the
half body BWB Baseline-II E5 will be use for the CFD simulation. The drawing of
rectangular canard will be use in the next chapter. The purposes of using the half
body of BWB Baseline-II E5 are to reduce the simulation time by reducing the
computer’s memory usage and saving time in modeling [19].
4.2 CFD Analysis with Variation of Grid Sensitivity
The drawing of the half body BWB Baseline-II E5 is then import to CFD to
generate the meshing. The analysis will be done by varying the values for selected
parameters to obtain a fine mesh and to test the CL, CD and L/D ratio. The process
will stop when the CL, CD, and L/D is approaching to constant at certain number of
grid.
There are mainly four parameters that will be vary to obtain the most suitable
parameter settings which are, (1) Box; (2) Initial Mesh; (3) Faceting; and (4) Number
of Refinement.
4.2.1 Initial Parameters
In order to run the simulation process for grid sensitivity study, a benchmark
parameter setting will be used. For example, when the parameter for the box is to be
39
vary as to obtain the L/D ratio is approaching to constant number of grid, the other
parameters setting for initial mesh, faceting and number of refinement will be based
on the benchmark parameters.
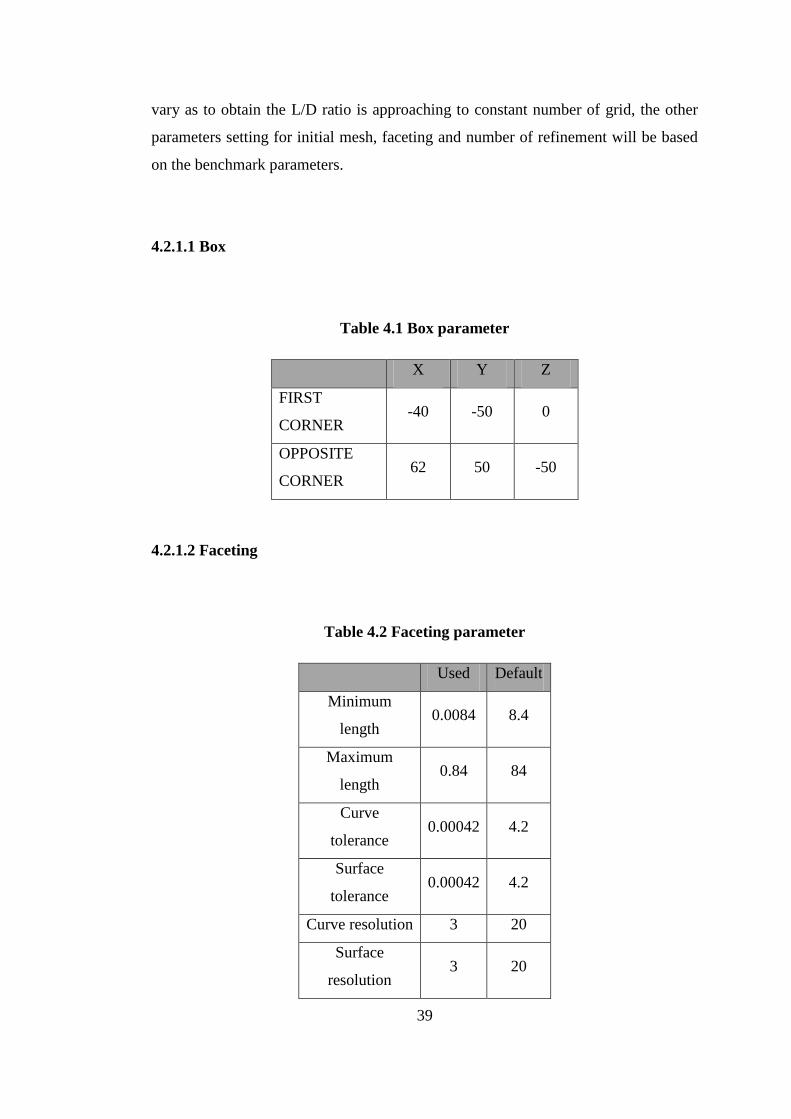
4.2.1.1 Box
Table 4.1 Box parameter
X Y Z
FIRST
CORNER -40 -50 0
OPPOSITE
CORNER 62 50 -50
4.2.1.2 Faceting
Table 4.2 Faceting parameter
Used Default
Minimum
length 0.0084 8.4
Maximum
length 0.84 84
Curve
tolerance 0.00042 4.2
Surface
tolerance 0.00042 4.2
Curve resolution 3 20
Surface
resolution 3 20
40
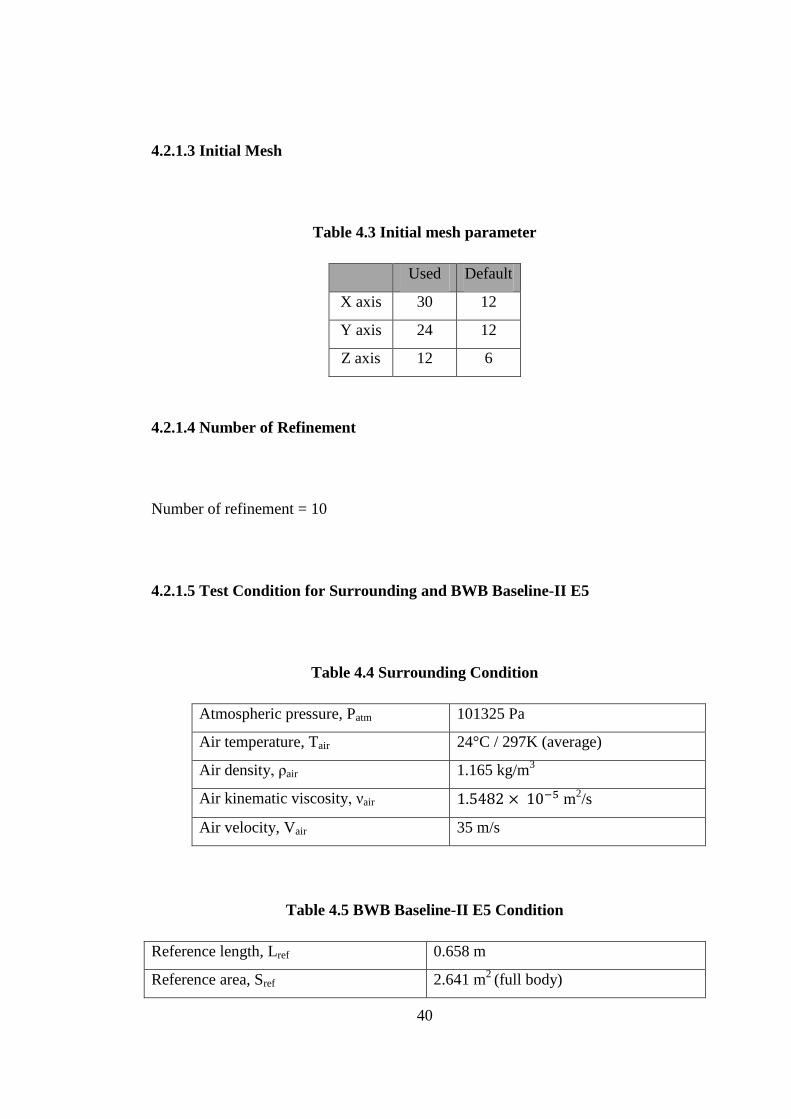
4.2.1.3 Initial Mesh
Table 4.3 Initial mesh parameter
Used Default
X axis 30 12
Y axis 24 12
Z axis 12 6
4.2.1.4 Number of Refinement
Number of refinement = 10
4.2.1.5 Test Condition for Surrounding and BWB Baseline-II E5
Table 4.4 Surrounding Condition
Atmospheric pressure, Patm 101325 Pa
Air temperature, Tair 24°C / 297K (average)
Air density, ρair 1.165 kg/m3
Air kinematic viscosity, νair m2/s
Air velocity, Vair 35 m/s
Table 4.5 BWB Baseline-II E5 Condition
Reference length, Lref 0.658 m
Reference area, Sref 2.641 m2
(full body)
41
Reference volumic mass, ρref 1.1642 kg/m3
4.2.2 Grid Sensitivity Analysis
From the above parameters, the simulation for the grid sensitivity study can
proceed by running simulation for various types of setting.
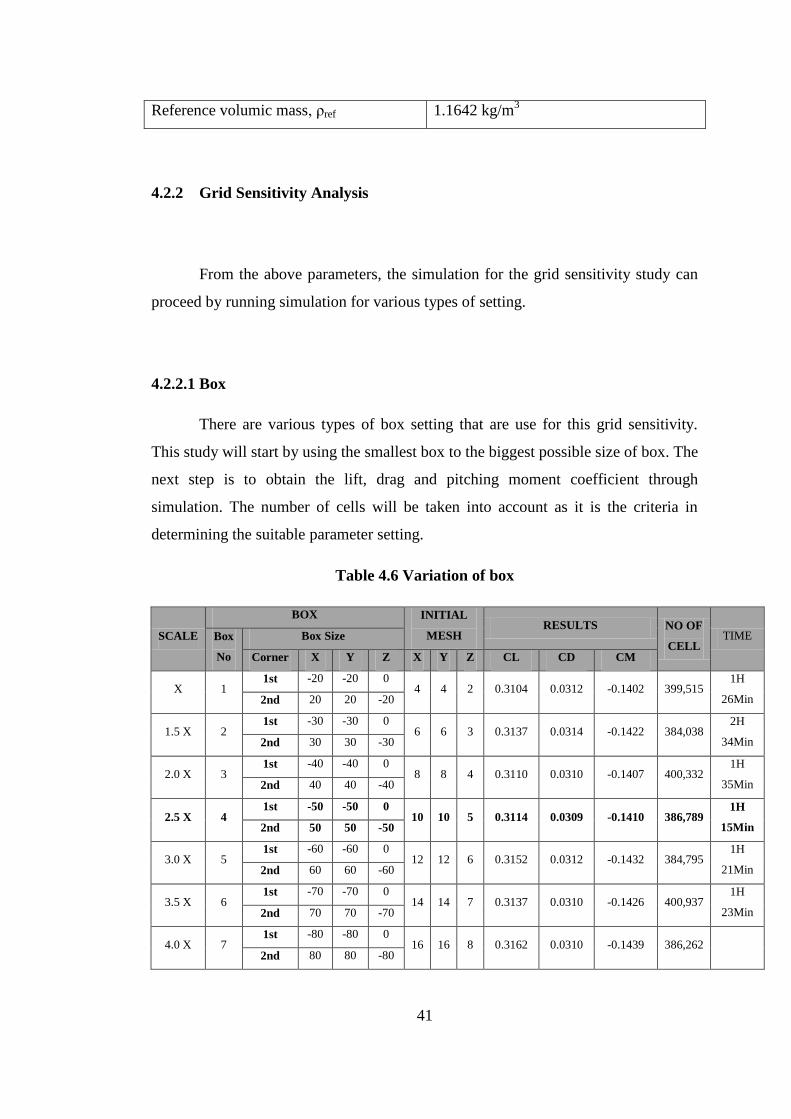
4.2.2.1 Box
There are various types of box setting that are use for this grid sensitivity.
This study will start by using the smallest box to the biggest possible size of box. The
next step is to obtain the lift, drag and pitching moment coefficient through
simulation. The number of cells will be taken into account as it is the criteria in
determining the suitable parameter setting.
Table 4.6 Variation of box
SCALE
BOX INITIAL
MESH RESULTS NO OF
CELL TIME Box
No
Box Size
Corner X Y Z X Y Z CL CD CM
X 1 1st -20 -20 0
4 4 2 0.3104 0.0312 -0.1402 399,515 1H
26Min 2nd 20 20 -20
1.5 X 2 1st -30 -30 0
6 6 3 0.3137 0.0314 -0.1422 384,038 2H
34Min 2nd 30 30 -30
2.0 X 3 1st -40 -40 0
8 8 4 0.3110 0.0310 -0.1407 400,332 1H
35Min 2nd 40 40 -40
2.5 X 4 1st -50 -50 0
10 10 5 0.3114 0.0309 -0.1410 386,789 1H
15Min 2nd 50 50 -50
3.0 X 5 1st -60 -60 0
12 12 6 0.3152 0.0312 -0.1432 384,795 1H
21Min 2nd 60 60 -60
3.5 X 6 1st -70 -70 0
14 14 7 0.3137 0.0310 -0.1426 400,937 1H
23Min 2nd 70 70 -70
4.0 X 7 1st -80 -80 0
16 16 8 0.3162 0.0310 -0.1439 386,262 2nd 80 80 -80
42
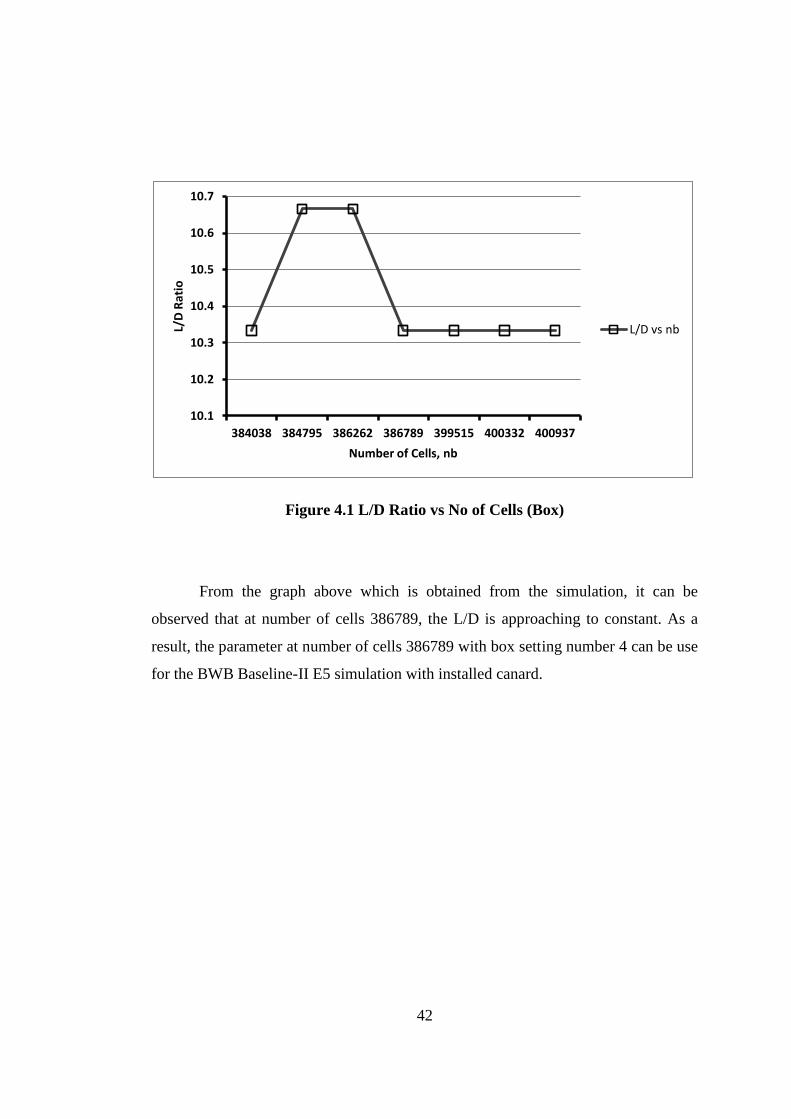
Figure 4.1 L/D Ratio vs No of Cells (Box)
From the graph above which is obtained from the simulation, it can be
observed that at number of cells 386789, the L/D is approaching to constant. As a
result, the parameter at number of cells 386789 with box setting number 4 can be use
for the BWB Baseline-II E5 simulation with installed canard.
10.1
10.2
10.3
10.4
10.5
10.6
10.7
384038 384795 386262 386789 399515 400332 400937
L/D
Rat
io
Number of Cells, nb
L/D vs nb
43
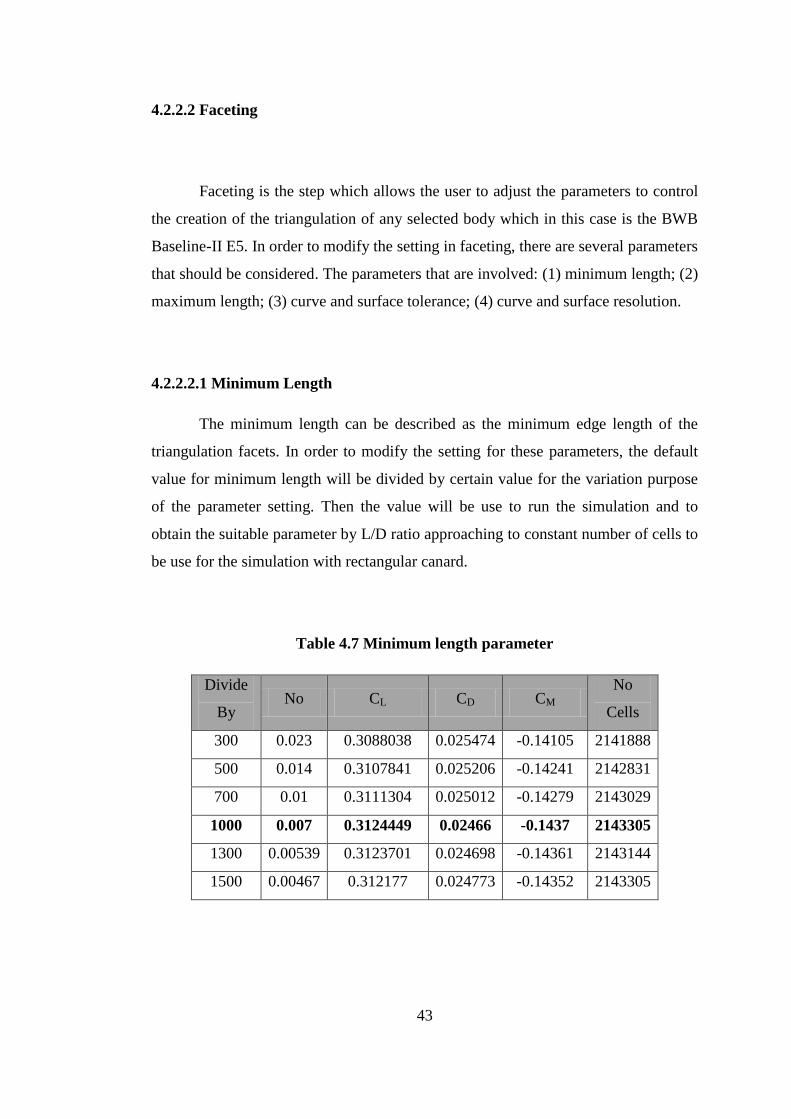
4.2.2.2 Faceting
Faceting is the step which allows the user to adjust the parameters to control
the creation of the triangulation of any selected body which in this case is the BWB
Baseline-II E5. In order to modify the setting in faceting, there are several parameters
that should be considered. The parameters that are involved: (1) minimum length; (2)
maximum length; (3) curve and surface tolerance; (4) curve and surface resolution.
4.2.2.2.1 Minimum Length
The minimum length can be described as the minimum edge length of the
triangulation facets. In order to modify the setting for these parameters, the default
value for minimum length will be divided by certain value for the variation purpose
of the parameter setting. Then the value will be use to run the simulation and to
obtain the suitable parameter by L/D ratio approaching to constant number of cells to
be use for the simulation with rectangular canard.
Table 4.7 Minimum length parameter
Divide
By No CL CD CM
No
Cells
300 0.023 0.3088038 0.025474 -0.14105 2141888
500 0.014 0.3107841 0.025206 -0.14241 2142831
700 0.01 0.3111304 0.025012 -0.14279 2143029
1000 0.007 0.3124449 0.02466 -0.1437 2143305
1300 0.00539 0.3123701 0.024698 -0.14361 2143144
1500 0.00467 0.312177 0.024773 -0.14352 2143305
44
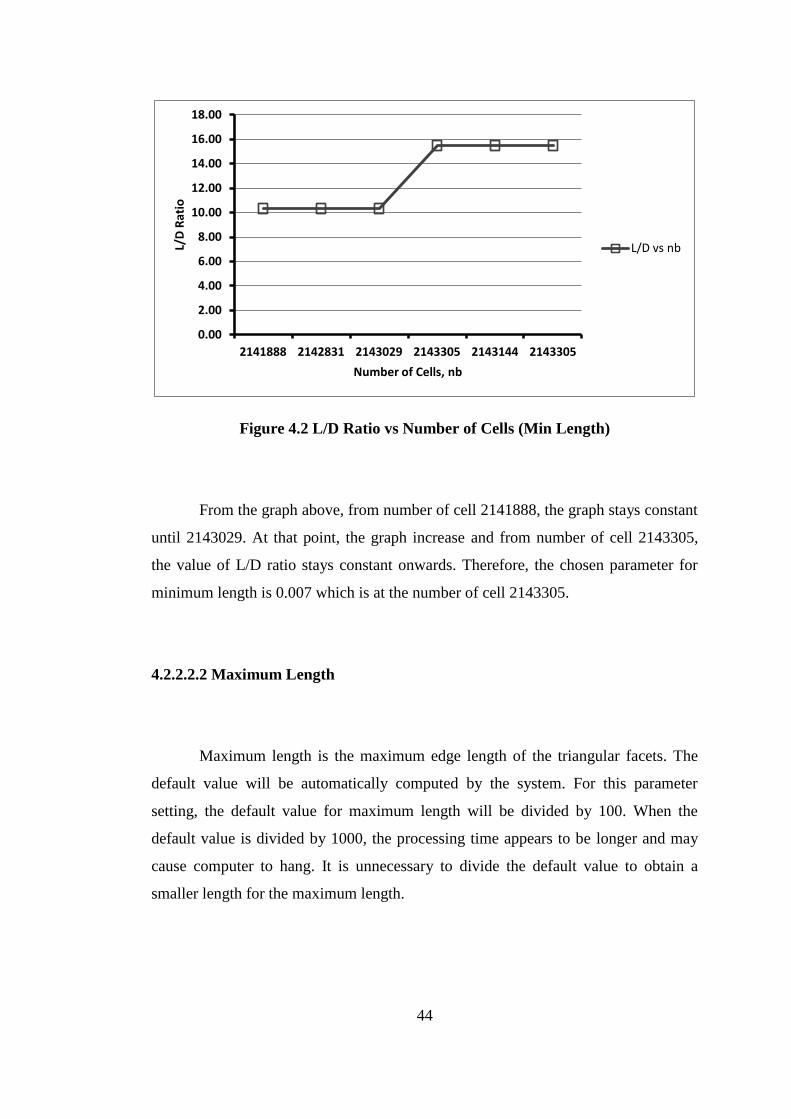
Figure 4.2 L/D Ratio vs Number of Cells (Min Length)
From the graph above, from number of cell 2141888, the graph stays constant
until 2143029. At that point, the graph increase and from number of cell 2143305,
the value of L/D ratio stays constant onwards. Therefore, the chosen parameter for
minimum length is 0.007 which is at the number of cell 2143305.
4.2.2.2.2 Maximum Length
Maximum length is the maximum edge length of the triangular facets. The
default value will be automatically computed by the system. For this parameter
setting, the default value for maximum length will be divided by 100. When the
default value is divided by 1000, the processing time appears to be longer and may
cause computer to hang. It is unnecessary to divide the default value to obtain a
smaller length for the maximum length.
0.00
2.00
4.00
6.00
8.00
10.00
12.00
14.00
16.00
18.00
2141888 2142831 2143029 2143305 2143144 2143305
L/D
Rat
io
Number of Cells, nb
L/D vs nb
45
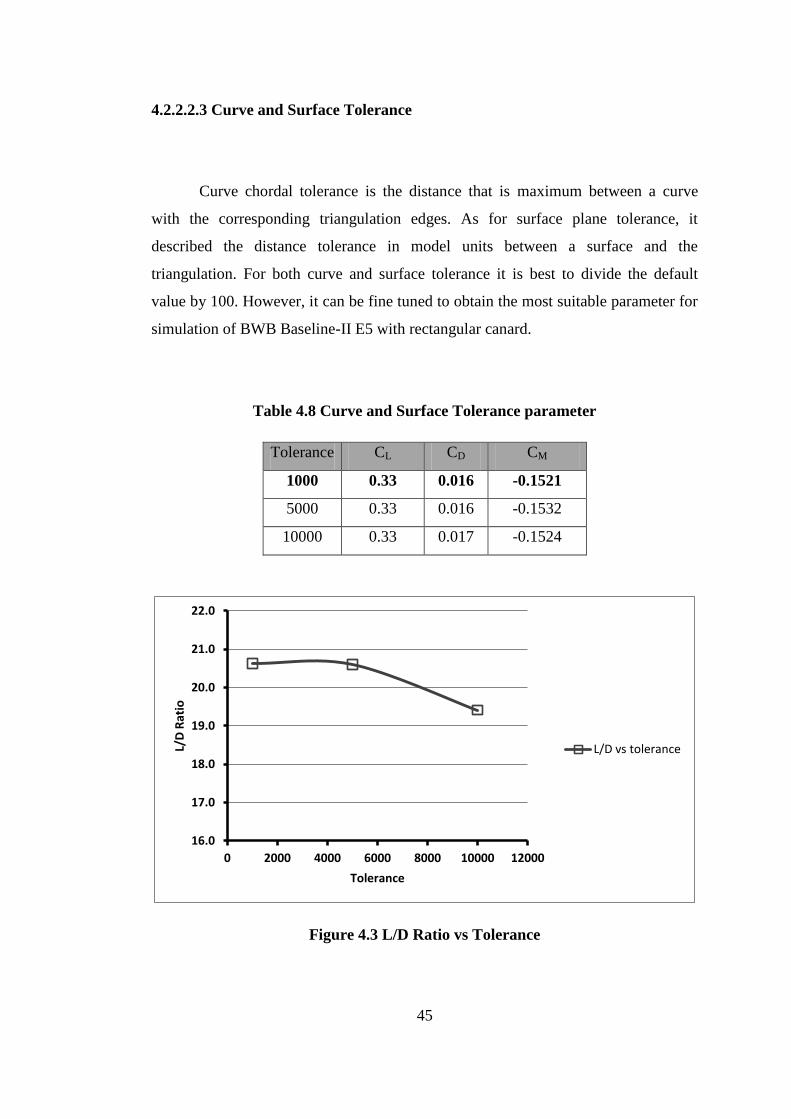
4.2.2.2.3 Curve and Surface Tolerance
Curve chordal tolerance is the distance that is maximum between a curve
with the corresponding triangulation edges. As for surface plane tolerance, it
described the distance tolerance in model units between a surface and the
triangulation. For both curve and surface tolerance it is best to divide the default
value by 100. However, it can be fine tuned to obtain the most suitable parameter for
simulation of BWB Baseline-II E5 with rectangular canard.
Table 4.8 Curve and Surface Tolerance parameter
Tolerance CL CD CM
1000 0.33 0.016 -0.1521
5000 0.33 0.016 -0.1532
10000 0.33 0.017 -0.1524
Figure 4.3 L/D Ratio vs Tolerance
16.0
17.0
18.0
19.0
20.0
21.0
22.0
0 2000 4000 6000 8000 10000 12000
L/D
Rat
io
Tolerance
L/D vs tolerance
46
From the graph of L/D ratio against tolerance above, the value of L/D can be
observed constant at tolerance 1000 until 5000. However, this value drops at
tolerance 10000. Therefore, the most suitable parameter to be use can be determined
at tolerance 1000.
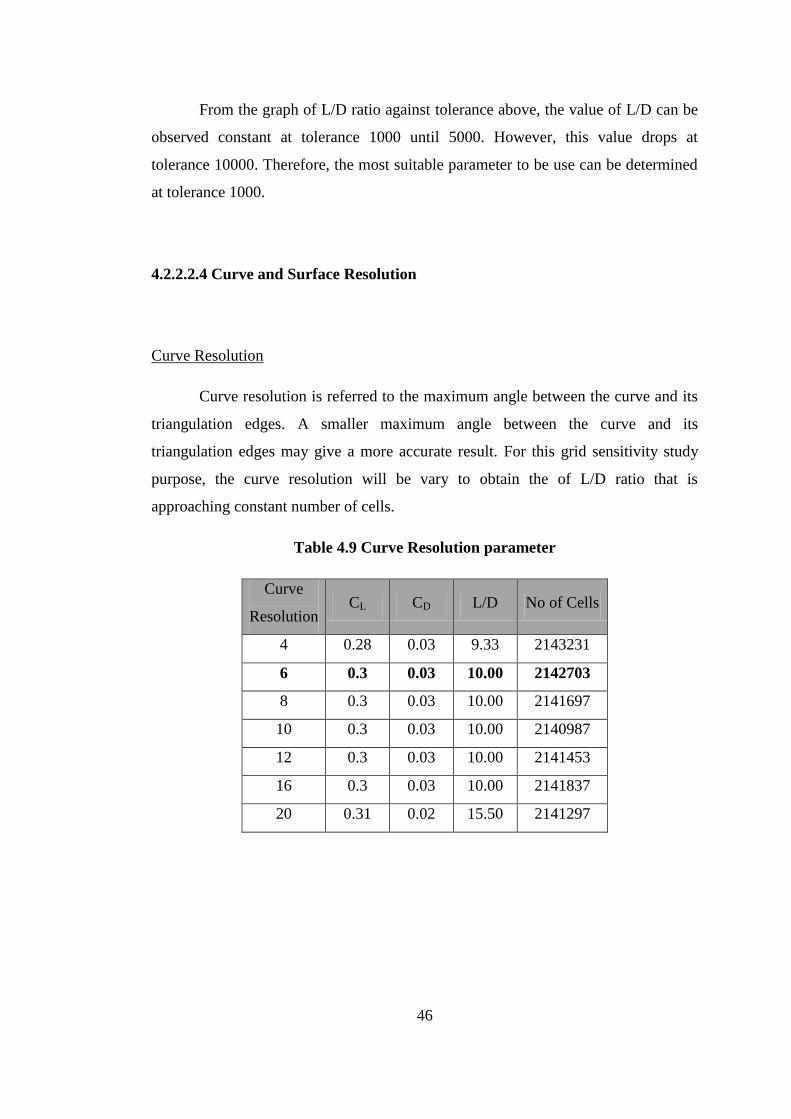
4.2.2.2.4 Curve and Surface Resolution
Curve Resolution
Curve resolution is referred to the maximum angle between the curve and its
triangulation edges. A smaller maximum angle between the curve and its
triangulation edges may give a more accurate result. For this grid sensitivity study
purpose, the curve resolution will be vary to obtain the of L/D ratio that is
approaching constant number of cells.
Table 4.9 Curve Resolution parameter
Curve
Resolution CL CD L/D No of Cells
4 0.28 0.03 9.33 2143231
6 0.3 0.03 10.00 2142703
8 0.3 0.03 10.00 2141697
10 0.3 0.03 10.00 2140987
12 0.3 0.03 10.00 2141453
16 0.3 0.03 10.00 2141837
20 0.31 0.02 15.50 2141297
47
Figure 4.4 L/D Ratio vs No of Cells (Curve Resolution)
From the graph above, the value of L/D fluctuated from number of cell
2140987 to 2141453. From L/D at number of cell 2141453, the L/D ratio value
moves in a constant manner and decrease at number of cell 2143231. The chosen
parameter for curve resolution is 6. Although the curve resolution of 6 is not at the
point where the L/D ratio is approaching to constant number of cells, however it is
still in the region where the L/D is constant despite the number of cells is slightly
higher 2142703 which does not give any significance different compared to curve
resolution at 12 with number of cells 2141453.
Surface Resolution
Surface resolution is the angular tolerance between the surface and its
triangulation. A lower angular tolerance may give a more accurate triangulation.
0
2
4
6
8
10
12
14
16
18
L/D
Rat
io
Number of Cells, nb
L/D vs nb
48
Table 4.10 Surface Resolution parameter
Surface
Resolution CL CD L/D
NO. OF
CELLS
4 0.31 0.02 15.50 2142508
7 0.31 0.02 15.50 2142519
8 0.31 0.02 15.50 2142460
10 0.31 0.03 10.33 2142428
13 0.31 0.02 15.50 2142524
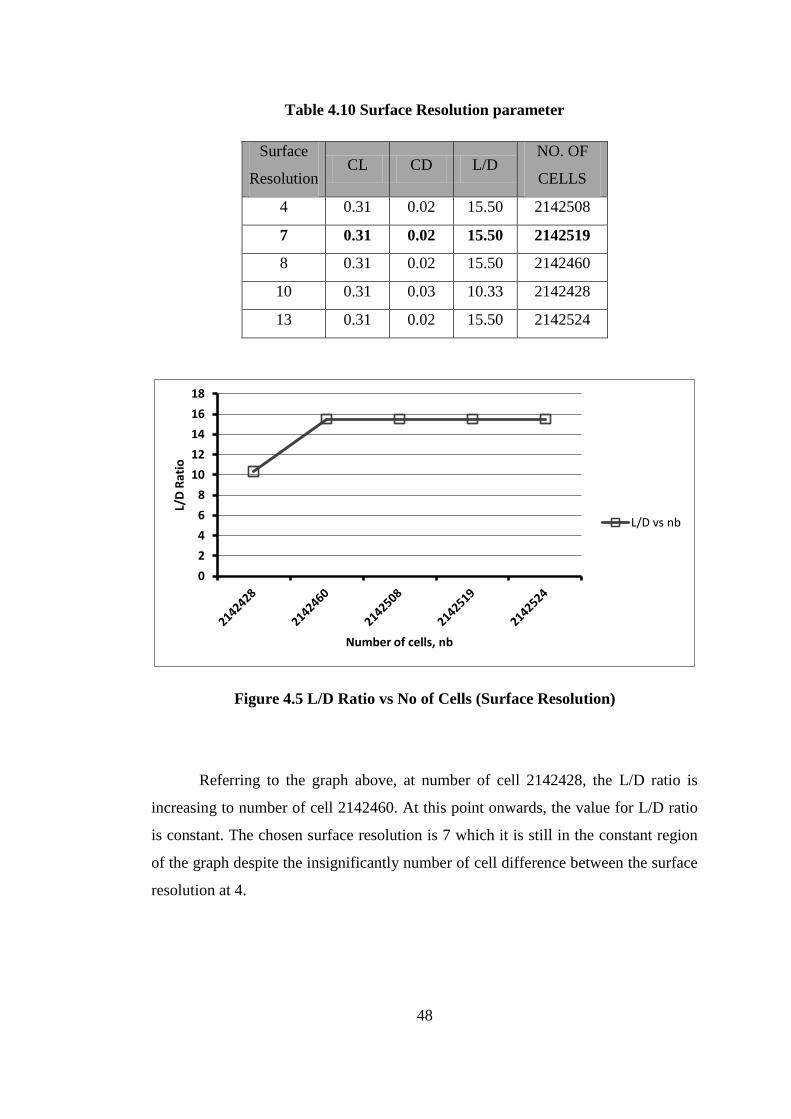
Figure 4.5 L/D Ratio vs No of Cells (Surface Resolution)
Referring to the graph above, at number of cell 2142428, the L/D ratio is
increasing to number of cell 2142460. At this point onwards, the value for L/D ratio
is constant. The chosen surface resolution is 7 which it is still in the constant region
of the graph despite the insignificantly number of cell difference between the surface
resolution at 4.
0
2
4
6
8
10
12
14
16
18
L/D
Rat
io
Number of cells, nb
L/D vs nb

49
4.2.2.3 Initial Mesh
The initial mesh is the crucial part that gives a large effect to the number of
cells. As the number of mesh increases, the number of cells will also increase.
Therefore, in order to obtain a lower number of cells in order to save time during
meshing, the number of mesh should be lower. With a higher number of cells, the
mesh quality would be finer.
Table 4.11 Initial Mesh parameter
Mesh CL CD L/D No. of
Cells
Mesh 1 0.3265 0.0164 19.97 1080
Mesh 2 0.3243 0.0163 19.94 2560
Mesh 3 0.3271 0.0170 19.21 5000
Mesh 4 0.3266 0.0163 19.98 8640
Mesh 5 0.3250 0.0159 20.47 13720
Mesh 6 0.3242 0.0163 19.84 20480
Mesh 7 0.3251 0.0154 21.05 29160
Mesh 8 0.3270 0.0170 19.18 40000
Mesh 9 0.3270 0.0166 19.75 53240
Mesh 10 0.3268 0.0164 19.97 69120
Table 4.12 Types of Initial Mesh
Mesh
1
Mesh
2
Mesh
3
Mesh
4
Mesh
5
Mesh
6
Mesh
7
Mesh
8
Mesh
9
Mesh
10
X axis 15 20 25 30 35 40 45 50 55 60
Y axis 12 16 20 24 28 32 36 40 44 48
Z axis 6 8 10 12 14 16 18 20 22 24

50
Figure 4.6 L/D Ratio vs No of Cells (Initial Mesh)
Graph above shows L/D ratio against number of cells. It can be observed that
the graph is fluctuating until at number of cell 40000, the L/D ratio is approaching to
constant number of cells. At this point, the parameter to be use for simulation of
BWB Baseline-II E5 with rectangular canard can be determined.
4.2.2.4 Number of Refinement
The number of refinement is use to adjust the quality of the mesh. A higher
number of refinements, the quality of the mesh will be finer. However, when the
number of the refinement increase, the number of cells will also increase.
Table 4.13 Number of Refinement parameter
No of
Refinement CL CD CM
No. of
Cells L/D
7 0.3173 0.0392 -0.1436 222772 8.09
15.9
16
16.1
16.2
16.3
16.4
16.5
16.6
0 20000 40000 60000 80000
L/D
Rat
io
Number of Cells, nb
L/D vs nb
51
8 0.3168 0.0288 -0.1456 619581 11.00
9 0.3135 0.0254 -0.1443 1841955 12.36
10 0.3135 0.0254 -0.1443 1841955 12.36
11 0.3135 0.0254 -0.1443 1841955 12.36
12 0.3135 0.0254 -0.1443 1841955 12.36
13 0.3135 0.0254 -0.1443 1841955 12.36
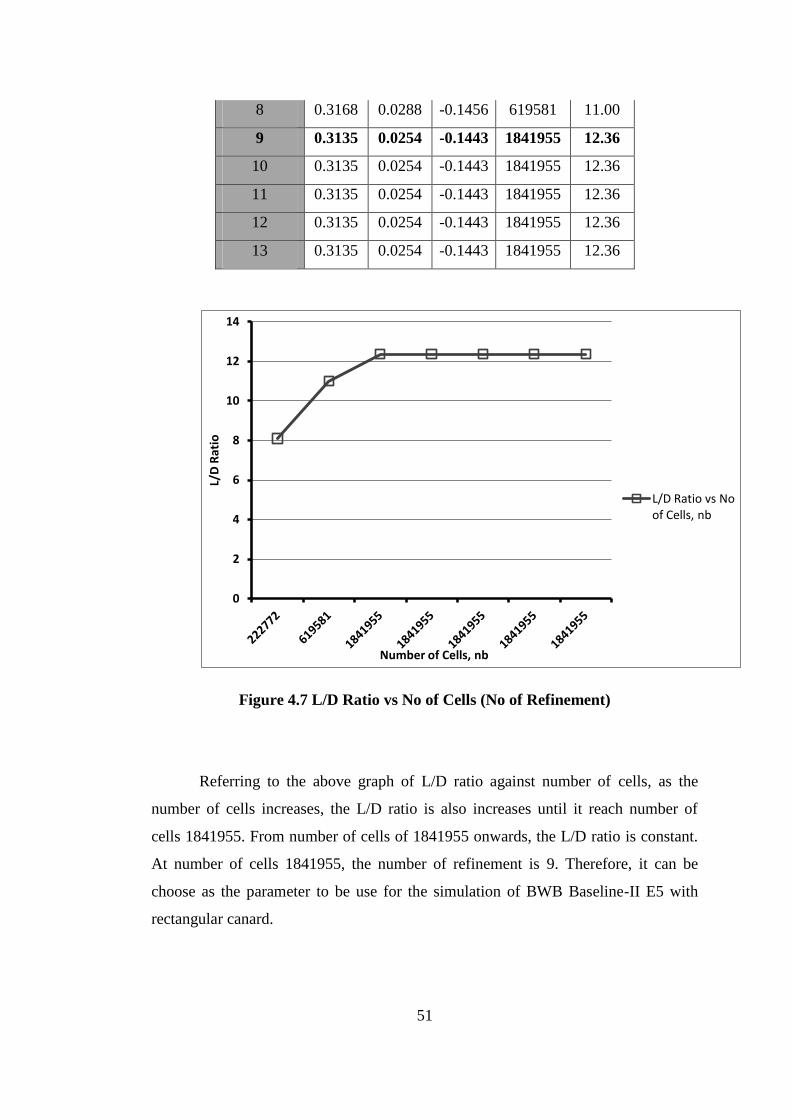
Figure 4.7 L/D Ratio vs No of Cells (No of Refinement)
Referring to the above graph of L/D ratio against number of cells, as the
number of cells increases, the L/D ratio is also increases until it reach number of
cells 1841955. From number of cells of 1841955 onwards, the L/D ratio is constant.
At number of cells 1841955, the number of refinement is 9. Therefore, it can be
choose as the parameter to be use for the simulation of BWB Baseline-II E5 with
rectangular canard.
0
2
4
6
8
10
12
14
L/D
Rat
io
Number of Cells, nb
L/D Ratio vs No of Cells, nb

52
4.3 Final Parameter Settings
After running the simulation for the grid sensitivity study, it can be come to a
consideration for the parameter setting that will be use for the simulation of BWB
Baseline-II E5 with a rectangular canard which will be use in the next chapter.
4.3.1 Box
Table 4.14 Box parameter
PARAMETER VALUE
X Y Z
FIRST CORNER -50 0 -50
OPPOSITE
CORNER 50 50 50
4.3.2 Faceting
Table 4.15 Faceting parameter
PARAMETER VALUE
min length 0.007
max length /100
curve tolerance /1000
surface tolerance /1000
curve resolution 6
surface resolution 7
53
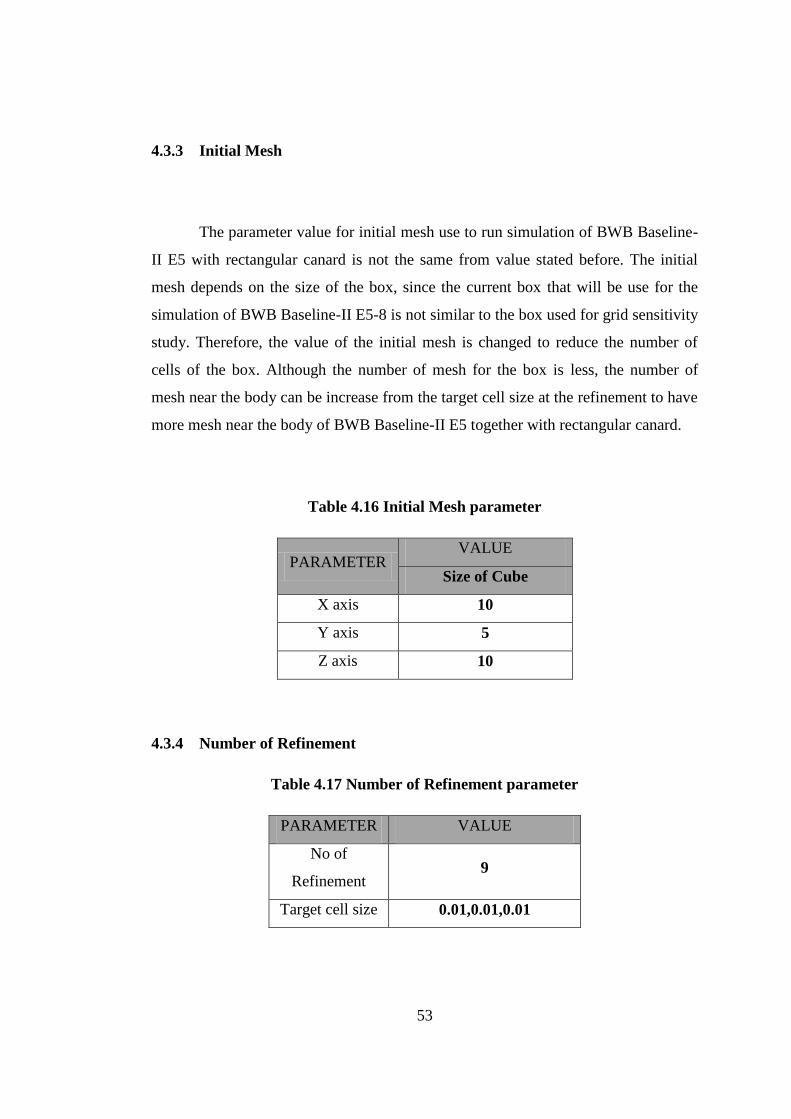
4.3.3 Initial Mesh
The parameter value for initial mesh use to run simulation of BWB Baseline-
II E5 with rectangular canard is not the same from value stated before. The initial
mesh depends on the size of the box, since the current box that will be use for the
simulation of BWB Baseline-II E5-8 is not similar to the box used for grid sensitivity
study. Therefore, the value of the initial mesh is changed to reduce the number of
cells of the box. Although the number of mesh for the box is less, the number of
mesh near the body can be increase from the target cell size at the refinement to have
more mesh near the body of BWB Baseline-II E5 together with rectangular canard.
Table 4.16 Initial Mesh parameter
PARAMETER VALUE
Size of Cube
X axis 10
Y axis 5
Z axis 10
4.3.4 Number of Refinement
Table 4.17 Number of Refinement parameter
PARAMETER VALUE
No of
Refinement 9
Target cell size 0.01,0.01,0.01

54
CHAPTER V
5. RESULT AND DISCUSSION
This chapter will discuss the result that is obtained from the simulation of the
BWB Baseline-II E5-8 with rectangular canard aspect ratio of 8 at various canard
setting angles, δ, at angle of attack, α = 10° by using the steps and parameters as
mentioned in the previous chapter.
The obtained data will be tabled and the graph of lift, drag and pitching
moment coefficient (CL, CD, and CM) will be plotted against the canard setting angle.
The aerodynamic characteristics from the result will be discuss by taking into
account the pressure and Mach contour as well as the velocity vectors.
55
5.1 Aerodynamic Analysis for BWB Baseline-II E5-8
The simulation process for BWB Baseline-II E5-8 is done at angle of attack
10° with various canard setting angles. For this project purposes, the deflection
angles of canard is taken from δ = -22° to δ = 8°. From the collected data, the lift,
drag and pitching moment coefficient (CL, CD and CM) of the BWB Baseline-II E5-8
can be discussed.
5.1.1 Result of BWB Baseline-II E5-8 CFD Simulation
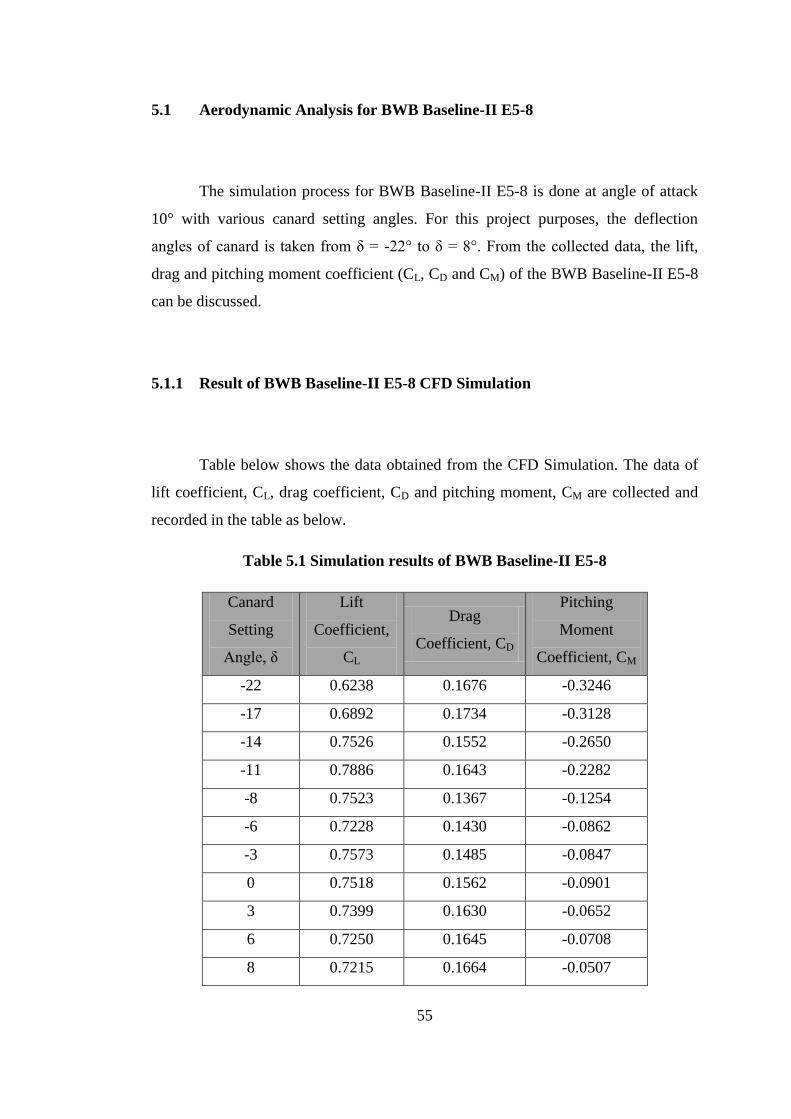
Table below shows the data obtained from the CFD Simulation. The data of
lift coefficient, CL, drag coefficient, CD and pitching moment, CM are collected and
recorded in the table as below.
Table 5.1 Simulation results of BWB Baseline-II E5-8
Canard
Setting
Angle, δ
Lift
Coefficient,
CL
Drag
Coefficient, CD
Pitching
Moment
Coefficient, CM
-22 0.6238 0.1676 -0.3246
-17 0.6892 0.1734 -0.3128
-14 0.7526 0.1552 -0.2650
-11 0.7886 0.1643 -0.2282
-8 0.7523 0.1367 -0.1254
-6 0.7228 0.1430 -0.0862
-3 0.7573 0.1485 -0.0847
0 0.7518 0.1562 -0.0901
3 0.7399 0.1630 -0.0652
6 0.7250 0.1645 -0.0708
8 0.7215 0.1664 -0.0507
56
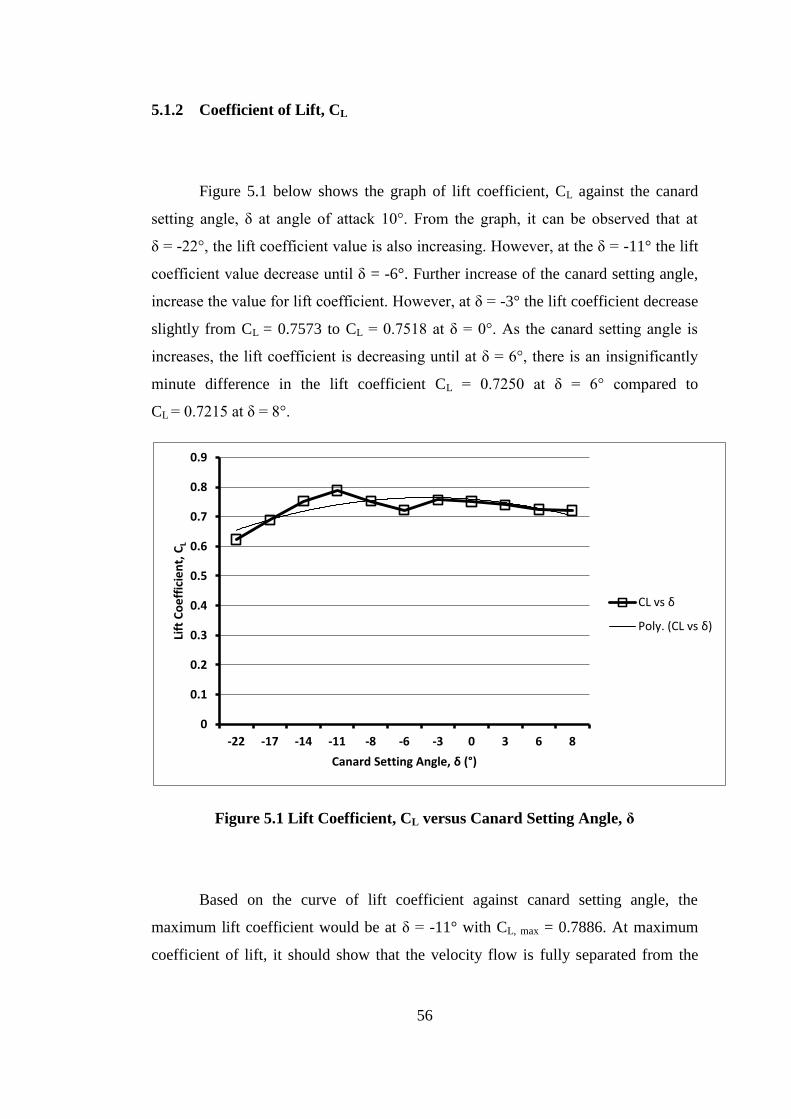
5.1.2 Coefficient of Lift, CL
Figure 5.1 below shows the graph of lift coefficient, CL against the canard
setting angle, δ at angle of attack 10°. From the graph, it can be observed that at
δ = -22°, the lift coefficient value is also increasing. However, at the δ = -11° the lift
coefficient value decrease until δ = -6°. Further increase of the canard setting angle,
increase the value for lift coefficient. However, at δ = -3° the lift coefficient decrease
slightly from CL = 0.7573 to CL = 0.7518 at δ = 0°. As the canard setting angle is
increases, the lift coefficient is decreasing until at δ = 6°, there is an insignificantly
minute difference in the lift coefficient CL = 0.7250 at δ = 6° compared to
CL = 0.7215 at δ = 8°.
Figure 5.1 Lift Coefficient, CL versus Canard Setting Angle, δ
Based on the curve of lift coefficient against canard setting angle, the
maximum lift coefficient would be at δ = -11° with CL, max = 0.7886. At maximum
coefficient of lift, it should show that the velocity flow is fully separated from the
0
0.1
0.2
0.3
0.4
0.5
0.6
0.7
0.8
0.9
-22 -17 -14 -11 -8 -6 -3 0 3 6 8
Lift
Co
eff
icie
nt,
CL
Canard Setting Angle, δ (°)
CL vs δ
Poly. (CL vs δ)
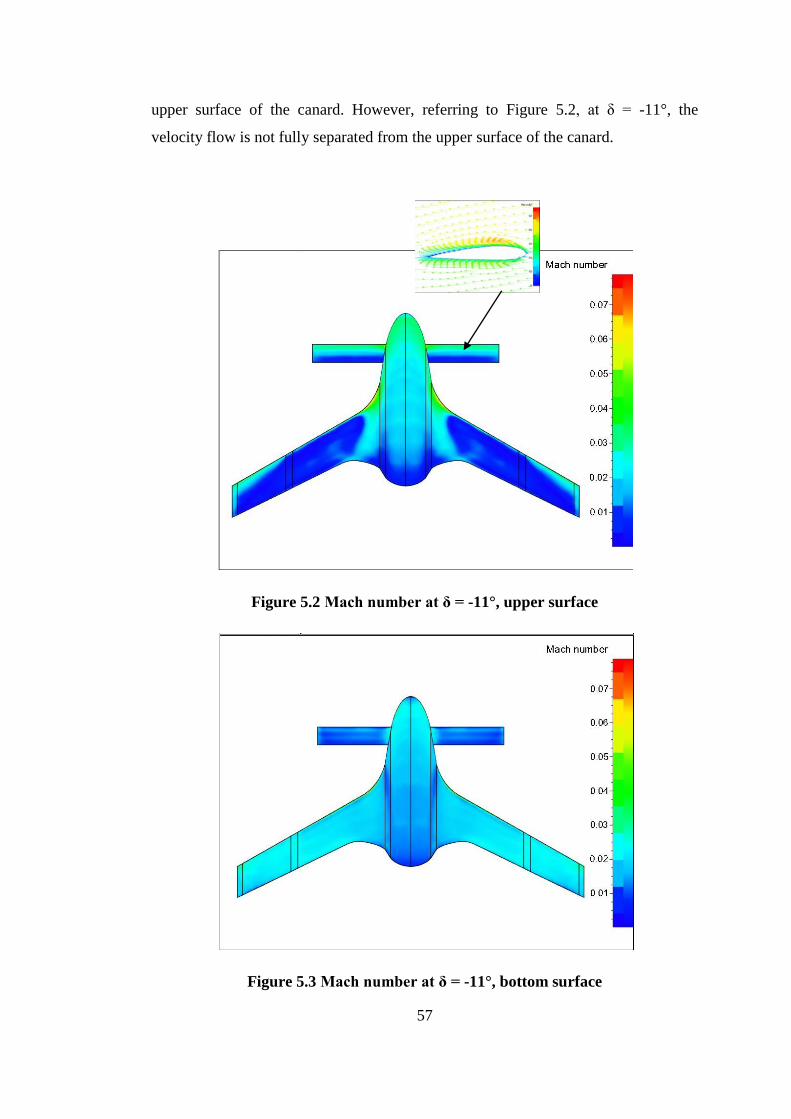
57
upper surface of the canard. However, referring to Figure 5.2, at δ = -11°, the
velocity flow is not fully separated from the upper surface of the canard.
Figure 5.2 Mach number at δ = -11°, upper surface
Figure 5.3 Mach number at δ = -11°, bottom surface
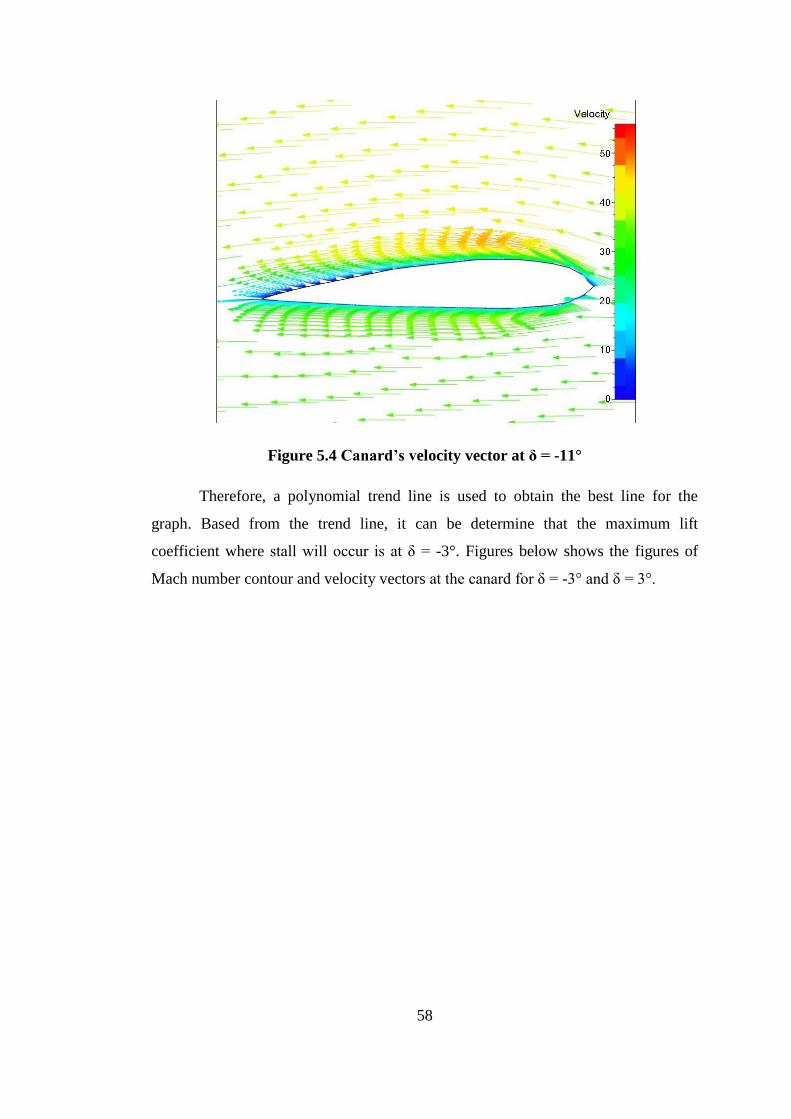
58
Figure 5.4 Canard’s velocity vector at δ = -11°
Therefore, a polynomial trend line is used to obtain the best line for the
graph. Based from the trend line, it can be determine that the maximum lift
coefficient where stall will occur is at δ = -3°. Figures below shows the figures of
Mach number contour and velocity vectors at the canard for δ = -3° and δ = 3°.

59
Figure 5.5 Mach number contour at δ = -3°, upper surface
Figure 5.6 Mach number contour at δ = -3°,bottom surface
60
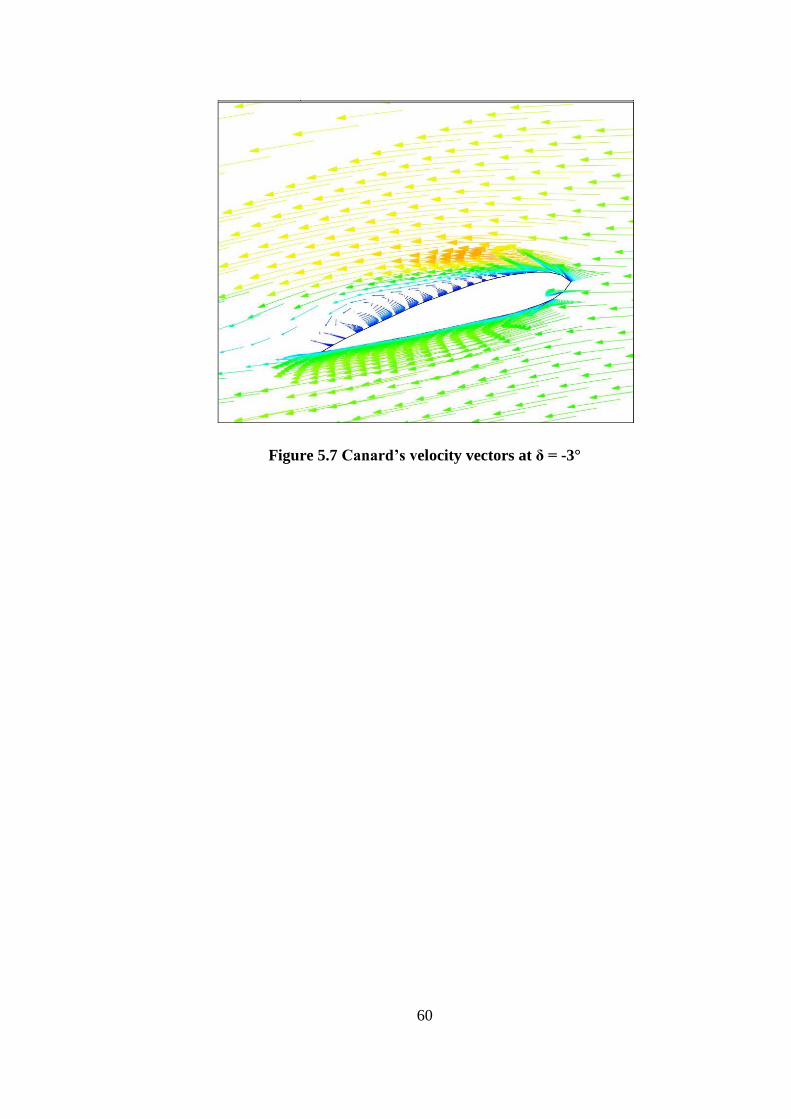
Figure 5.7 Canard’s velocity vectors at δ = -3°

61
Figure 5.8 Mach number contour at δ = 3°, upper surface
Figure 5.9 Mach number contour at δ = 3°, bottom surface
62
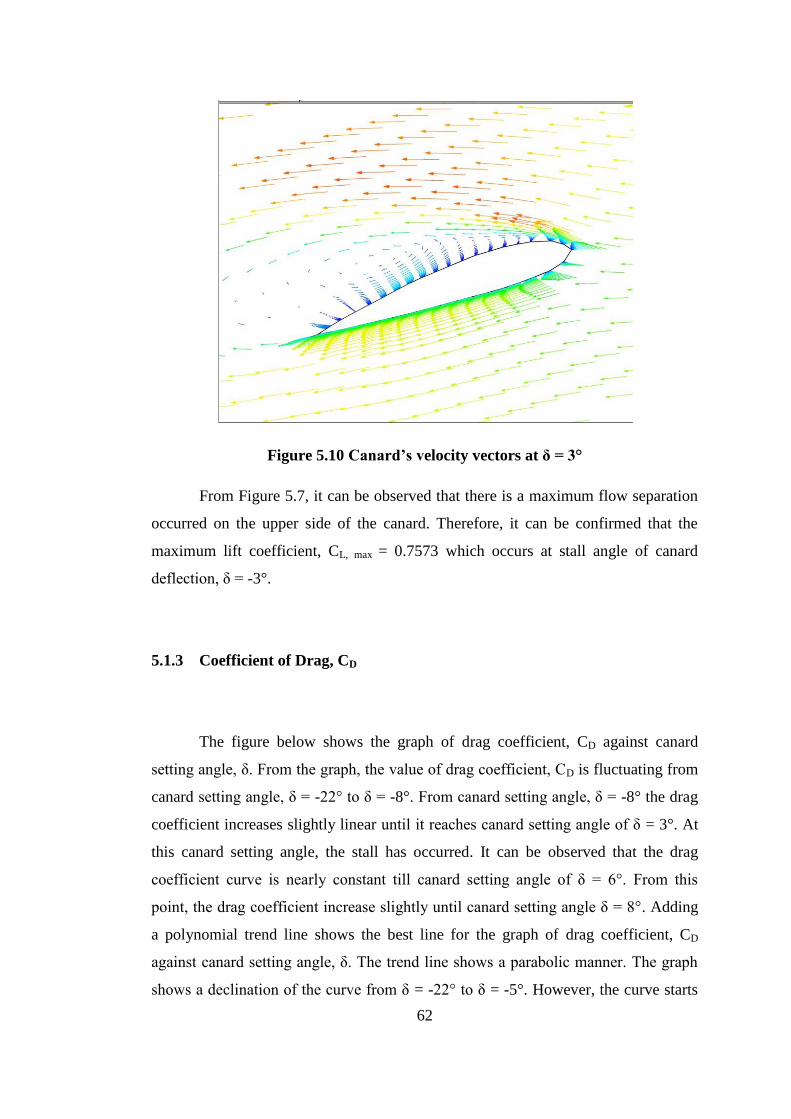
Figure 5.10 Canard’s velocity vectors at δ = 3°
From Figure 5.7, it can be observed that there is a maximum flow separation
occurred on the upper side of the canard. Therefore, it can be confirmed that the
maximum lift coefficient, CL, max = 0.7573 which occurs at stall angle of canard
deflection, δ = -3°.
5.1.3 Coefficient of Drag, CD
The figure below shows the graph of drag coefficient, CD against canard
setting angle, δ. From the graph, the value of drag coefficient, CD is fluctuating from
canard setting angle, δ = -22° to δ = -8°. From canard setting angle, δ = -8° the drag
coefficient increases slightly linear until it reaches canard setting angle of δ = 3°. At
this canard setting angle, the stall has occurred. It can be observed that the drag
coefficient curve is nearly constant till canard setting angle of δ = 6°. From this
point, the drag coefficient increase slightly until canard setting angle δ = 8°. Adding
a polynomial trend line shows the best line for the graph of drag coefficient, CD
against canard setting angle, δ. The trend line shows a parabolic manner. The graph
shows a declination of the curve from δ = -22° to δ = -5°. However, the curve starts
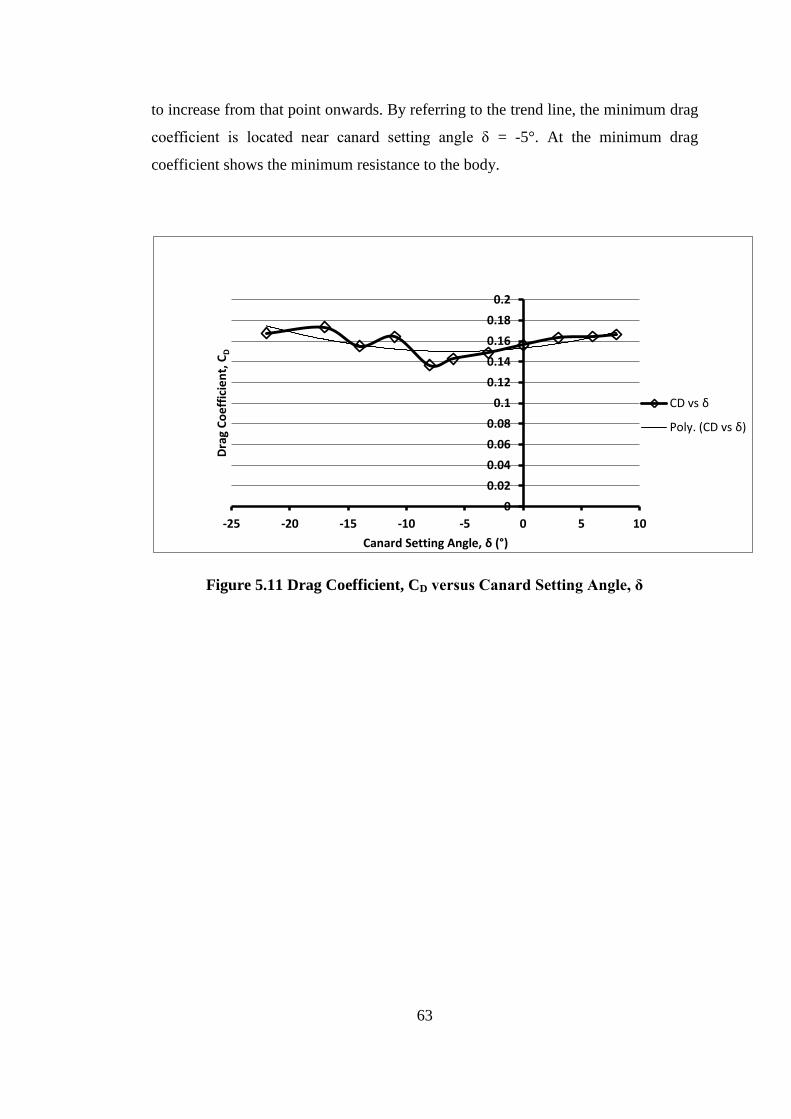
63
to increase from that point onwards. By referring to the trend line, the minimum drag
coefficient is located near canard setting angle δ = -5°. At the minimum drag
coefficient shows the minimum resistance to the body.
Figure 5.11 Drag Coefficient, CD versus Canard Setting Angle, δ
0
0.02
0.04
0.06
0.08
0.1
0.12
0.14
0.16
0.18
0.2
-25 -20 -15 -10 -5 0 5 10
Dra
g C
oe
ffic
ien
t, C
D
Canard Setting Angle, δ (°)
CD vs δ
Poly. (CD vs δ)
64
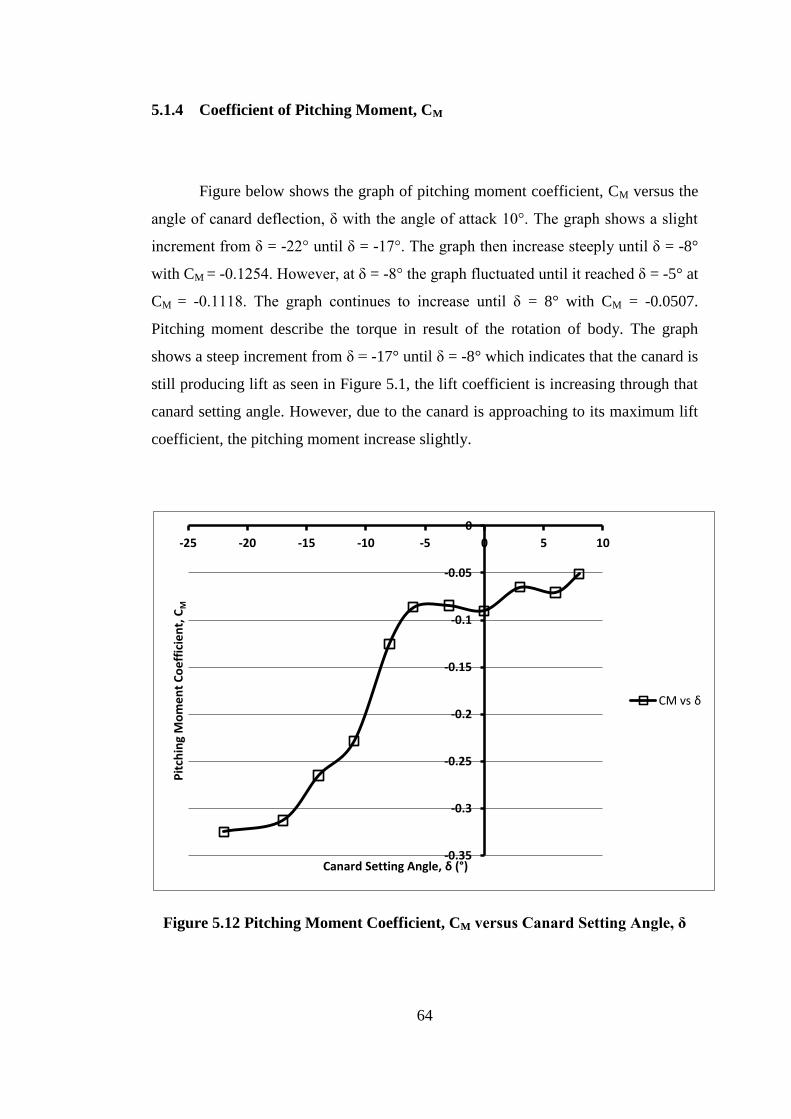
5.1.4 Coefficient of Pitching Moment, CM
Figure below shows the graph of pitching moment coefficient, CM versus the
angle of canard deflection, δ with the angle of attack 10°. The graph shows a slight
increment from δ = -22° until δ = -17°. The graph then increase steeply until δ = -8°
with CM = -0.1254. However, at δ = -8° the graph fluctuated until it reached δ = -5° at
CM = -0.1118. The graph continues to increase until δ = 8° with CM = -0.0507.
Pitching moment describe the torque in result of the rotation of body. The graph
shows a steep increment from δ = -17° until δ = -8° which indicates that the canard is
still producing lift as seen in Figure 5.1, the lift coefficient is increasing through that
canard setting angle. However, due to the canard is approaching to its maximum lift
coefficient, the pitching moment increase slightly.
Figure 5.12 Pitching Moment Coefficient, CM versus Canard Setting Angle, δ
-0.35
-0.3
-0.25
-0.2
-0.15
-0.1
-0.05
0
-25 -20 -15 -10 -5 0 5 10
Pit
chin
g M
om
en
t C
oe
ffic
ien
t, C
M
Canard Setting Angle, δ (°)
CM vs δ

65
5.1.5 Pressure Distribution
From the pressure distribution, when there is a difference in pressure at upper
and lower surface of the body, the body will experience lift.
Figure 5.13 Pressure contours at δ = -11° for upper (left) and lower (right)
surfaces
Figure 5.14 Pressure contours at δ = -5° for upper (left) and lower (right)
surfaces
Figure 5.15 Pressure contours at δ = -3° for upper (left) and lower (right)
surfaces

66
Figure 5.16 Pressure contours at δ = 3° for upper (left) and lower (right)
surfaces
Figure 5.14 shows the pressure contours at δ = -5°. As mentioned previously,
the minimum drag coefficient is at δ = -5°. It can be observed that at δ = -5° the
pressure at the leading edge of wing is less compared to other canard setting angle.
When the pressure is less, the resistance to the wind is also decrease. Since the
resistance is less, the drag is at its minimum.
Figures above show that there is a pressure difference at the upper and lower
surfaces. The pressure at the lower surface is higher than the pressure at the upper
surface. As a result, the lift force is produced due to this difference in pressure
distribution.
67
CHAPTER VI
6.0 CONCLUSION AND RECOMMENDATION
68
6.1 Conclusion
The BWB Baseline-II E5-8 have a maximum lift coefficient, CL, max = 0.7573
at canard setting angle δ = -3°. At this point, the flow separation occurs which result
in stall. From the result obtained, the minimum drag coefficient is located at canard
setting angle δ = -5° with CD = 0.1430.
6.2 Recommendation
There are some improvements that can be done for the future work.
1) Improve mesh quality by using a smaller mesh size to obtain the finest mesh
2) Increase the initial mesh parameter to increase the number of mesh in the
boundary.
3) Upgrade the existing computer in order for it to be able to run simulation of a
body with more number of cells and smaller mesh size.

69
7.0 REFERENCES
1. Robert F. Stengel, “Aircraft Flight Dynamics”, 2008.
2. John P. Fielding, “Introduction to Aircraft Design”, 2008.
3. John D. Anderson, “Introduction to Flight”, 2008.
4. Thomas C. Corke, “Design of Aircraft”. Upper Saddle River, New Jersey:
Pearson/Prentice Hall, 2003.
5. Zurriati M. Ali, Wahyu Kuntjoro, Wirachman Wisnoe, Rizal E. M Nasir.
“The Effect of Canard on Aerodynamics of Blended Wing Body”, Applied
Mechanics and Materials, Trans Tech Publications, Switzerland.
6. http://www.aerospaceweb.org/question/dynamics/q0045.shtml, September 23,
2001.
7. Yunus A.Cengel, John M. Cimbala, “Fluid Mechanics Fundamentals and
Applications”, Singapore, Mc-Graw Hill, 2006.
8. Canards, Evan Neblett, Mike Metheny, Leifur Thor Leifsson, AOE 4124
Configuration Aerodynamics Virginia Tech 17. March 2003.

70
9. M.R. Soltani, F. Askari, A.R. Davari and A. Nayebzadeh. “Effects of Canard
Position on Wing Surface Pressure Transaction” Mechanical Engineering
Vol. 17, No. 2, pp. 136-145, Sharif University of Technology, April 2010.
10. Thomas C. Corke, “Design of Aircraft”. Upper Saddle River, New Jersey:
Pearson/Prentice Hall, 2003.
11. The Blended Wing Body Aircraft Leifur T. Leifsson and William H. Mason
Virginia Polytechnic Institute and State University Blacksburg, VA, USA.
12. N. Qin, A. Vavalle, A Le Moigne, M. Laban, K.Hackett, P. Weinerfelt.
Aerodynamics Studies for Blended Wing Body Aircraft. 9th AIAA/ISSMO
Symposium on Multidisciplinary Analysis and optimization, 4 – 6 September
(2002), Atlanta, Georgia.
13. S. Siouris, N. Qin. Study of the Effects of Wing Sweep on the Aerodynamic
Performance of a Blended Wing Body. (2006) Aerodynamics and
Thermofluids Group, Department of Mechanical Engineering, University of
Sheffield, UK.
14. Wirachman Wisnoe, Wahyu Kuntjoro, Firdaus Mohamad, Rizal Effendy
Mohd Nasir, Nor F Reduan, Zurriati Ali, "Experimental Results Analysis for
UiTM BWB Baseline-I and Baseline-II UAV Running at 0.1 Mach number",
International Journal of Mechanics, Issue 2, Volume 4, 2010, ISSN: 1998-
4448, pp. 23-32.
15. John P. Fielding, “Introduction to Aircraft Design”, 2008.
16. Zurriati M. Ali, Wahyu Kuntjoro, Wirachman Wisnoe, Rizal Efendy M.
Nasir, Firdaus Mohamad, Nor F. Reduan, “The Aerodynamics Performance
of Blended Wing Body Baseline-II E2”, The 2011 International Conference
on Fluid Dynamics and Thermodynamics Technologies (FDTT 2011), Bali,
Indonesia, April 1-3, 2011, ISBN: 978-1-4244-9831-4.
17. http://science.howstuffworks.com/transport/flight/modern/airplanes5.htm
18. http://science.howstuffworks.com/transport/flight/modern/airplanes1.htm

71
19. Zurriati M. Ali, Wahyu Kuntjoro, Wirachman Wisnoe, Rizal Efendy M.
Nasir, Matzaini K., “The Aerodynamic Study of Low Aspect Ratio Canard on
BWB-Baseline II E2”, The 2010 International Conference on Advances in
Mechanical Engineering (ICAME 2010), Faculty of Mechanical Engineering,
UiTM.

72
APPENDICES
APPENDIX A – CAD Drawing of BWB Baseline II E5-8
73
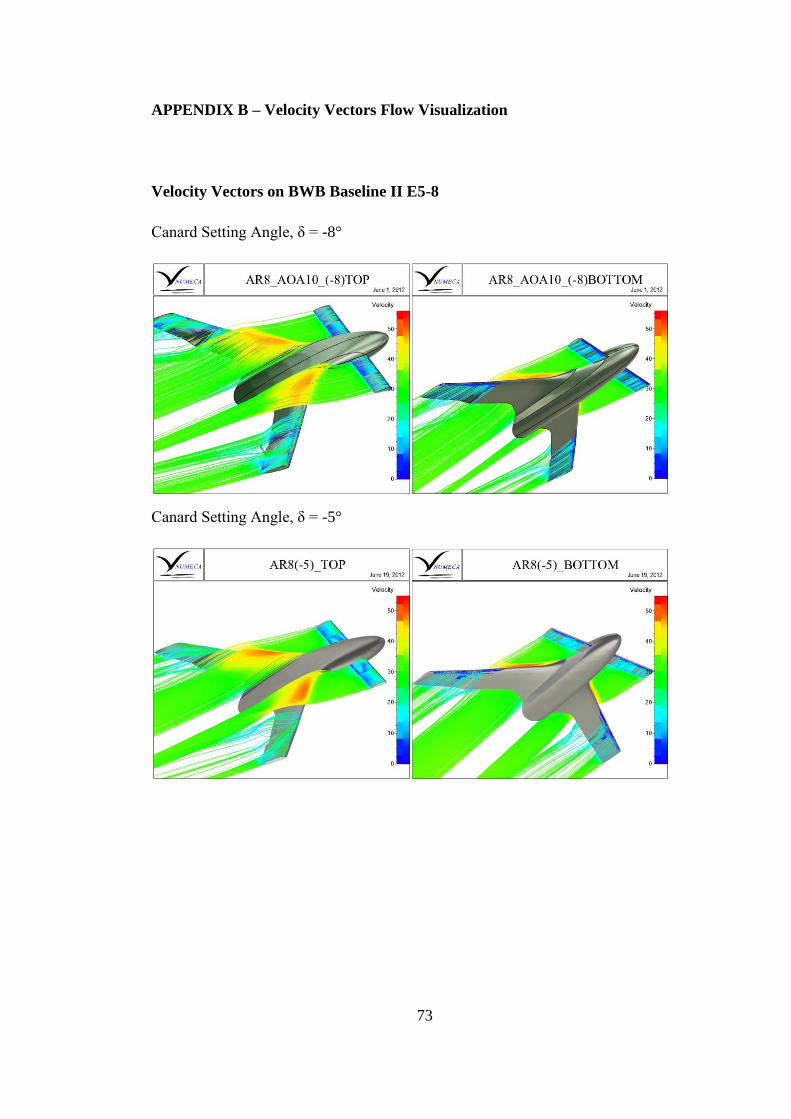
APPENDIX B – Velocity Vectors Flow Visualization
Velocity Vectors on BWB Baseline II E5-8
Canard Setting Angle, δ = -8°
Canard Setting Angle, δ = -5°

74
Canard Setting Angle, δ = -3°
Canard Setting Angle, δ = 0°
Canard Setting Angle, δ = 3°

75
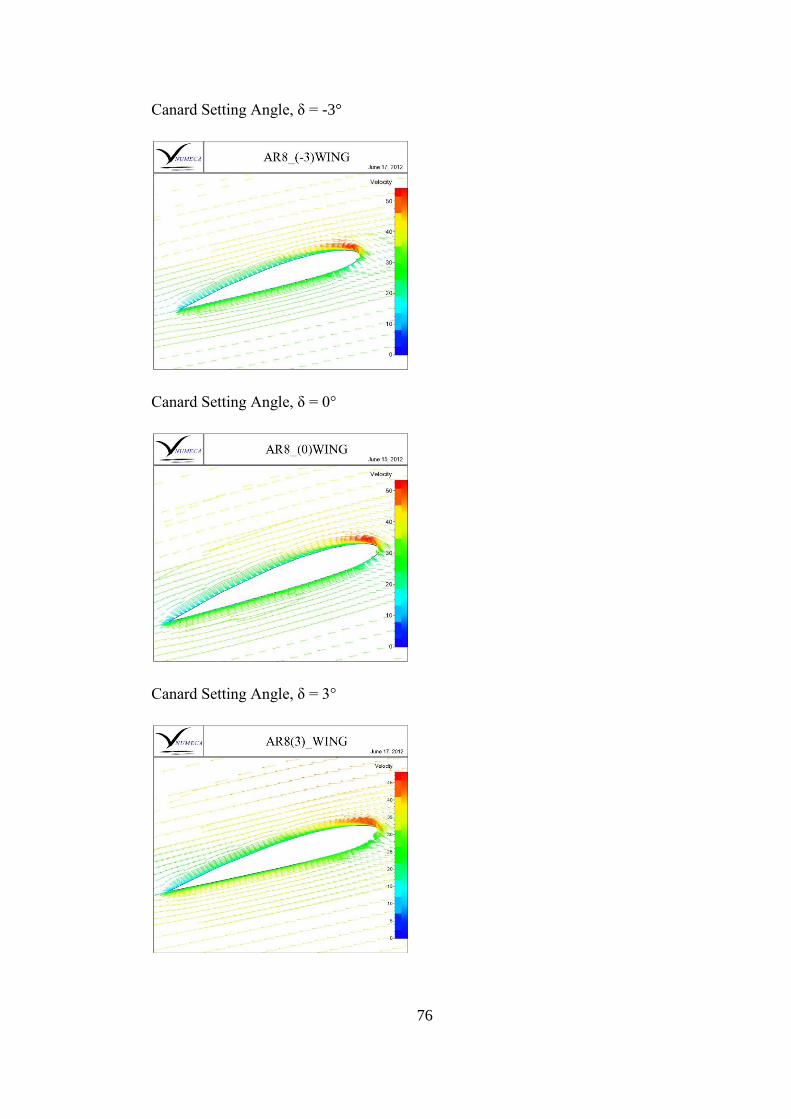
APPENDIX B1 – Velocity Vectors Flow Visualization
Wing’s Velocity Vectors
Canard Setting Angle, δ = -8°
Canard Setting Angle, δ = -5°
76
Canard Setting Angle, δ = -3°
Canard Setting Angle, δ = 0°
Canard Setting Angle, δ = 3°







