controles de temperatura deltatemp - …omicroning.co/documentos/manual-deltatemp.pdf · - la...
TRANSCRIPT

CONTROLES DE TEMPERATURA
Manual de referencia para el usuario
www.omicroning.co
Deltatemp

Descripción general del sistema
1
El control de temperatura de la serie
El sensor de temperatura, incluido, es construido con un termistor NTC, el cual posibilita una precisión de una décima de grado (0.1ºC), alta repetitividad y bajo costo comparado con sistemas igualmente precisos basados en una RTD como la PT100. Los controles δ-Temp son fáciles de programar y pueden registrar los eventos en que se presentan las temperaturas fuera de rango a través de alarmas visuales y auditivas.
Deltatemp
Deltatempes ideal para controlar procesos, hasta 125ºCcon alta precisión, con�abilidad y seguridad

Aplicaciones principales Deltatemp
2
1
2
Como baños maría, Incubadoras, hornos de cultivo, calentadores de suero, equipos de desinfección, etc.
EQUIPOS DE USO CLÍNICO
INCUBADORAS DE HUEVOS PARA AVES
Incubadoras de huevos para aves como codorni-ces, gallinas entreo otras.
3
OTRAS APLICACIONES
Procesos de calentamiento que requieran alta precisión a temperaturas inferiores a 125°C. Tales como calefacción solar, calefacción de piscinas y calentamiento de líquidos

Parámetro Equipo de Rango NormalRango de Temperatura 10 a 125°C
Resolución
Error Máximo de Lectura 0.5 °C rango de 10 a 99.9°C1.0 °C rango de 100 a 125°C
• Indicación de temperatura en °C o °F• Sensor de temperatura incluido, longitud de cable 2 metros, extendible hasta 99 metros.• Alarmas visual y sonora interna por temperatura fuera de rango.• Tres salidas de control: • Salida 1: Una Salida tipo relé 5A/110 VAC para control de calentamiento PID. • Relé 2: Una salida auxiliar tipo relé 2A/110 VAC programable como temporizador cíclico o alarma remota.• Relé 3: Una salida auxiliar tipo relé 2A/110 VAC programable como alarma remota o como una salida de control para calefac ción o enfriamiento.
Atención. Si se utiliza el Rele 3 en conjunto con el Rele1 ó el Rele2 debe tenerse en cuenta que hay una la señal de voltaje AC común en el pin 10.
• Alimentación eléctrica: • 90 a 250 VAC• Fácil programación para el usuario final (solo acceso al Set Point).• Parámetros de control programables por el fabricante, protegidos por clave de acceso.• Ambiente de trabajo: • Equipo: 10 ºC < TA < 60ºC / H.R. < 80% no condensable.• Sensor: -40ºC < Tw < 120ºC.
ADVERTENCIA
Los componentes electrónicos de este dispositivo no están diseñados para trabajar directamente dentro del sistema a controlar ya que esto puede exceder los rangos de temperatura y humedad ambiente permitidos.
0.1 °C rango de 10 a 99.9°C1.0 °C rango de 100 a 125°C
Características técnicas principales
3
Deltatemp

El control de temperatura de las serie δ–TEMP es un sistema PID (Proporcional Integral Derivativo). Esta teoría de control la puede consultar en el Anexo 1.
Operación en equipos de laboratorio y hospitalarios:El control δ–TEMP esta diseñado para procesos que requieran alta precisión como los equipos de uso hospitalario, como por ejemplo baños María, hornos de cultivo, etc. Se pueden utilizar sus tres salidas:- La salida 1 para activar la resistencia de calefacción.- La salida 2 temporizada se puede utilizar para activar un motor de agitación de agua o un ventilador para homogenizar el aire en la cámara interior de un horno.- La tercer salida para una indicación visual o sonora de alarma.- Los parámetros de control PID vienen optimizados para operar con este tipo de equipos por lo que no requiere de grandes ajustes.
Este producto podría ser diseñado a la medida de sus necesidades,
consúltenos como en www.omicroning.co
Operación
4
Deltatemp
Operación en incubadoras de huevos:Las incubadoras de huevos son un proceso que requiere alta precisión, los controles δ–TEMP han sido utilizados para fabrica-ción de estos equipos permitiendo a los productores obtener tasas de nacimientos de hasta el 85% comparadas con las tasas obtenidas con termóstatos que solo alcanzan un máximo del 65%, esto es debido a la gran estabilidad que se logra en la temperatura con los controles δ–TEMP.Se pueden utilizar las tres salidas:- La salida 1 para activar resistencia de calentamiento.- La salida 2 temporizada para activar el ciclo de volteo.- La salida 3 para una indicación visual o sonora de alarma.- Los parámetros de control PID vienen optimizados para operara con este tipo de equipos por lo que no requiere de grandes ajustes.
Operación
5
Deltatemp
El volteo automático: La salida 2 temporizada se puede aprove-char para conectar el motor de volteo para las bandejas de los huevos, para ello siga las siguientes recomendaciones:- Utilice el botón disminuir ( ) para realizar un volteo manual.- Los dos primeros días de incubación deje las bandejas de la incubadora niveladas y apague el volteo, bien sea a través de un suiche externo que desconecte el motor de volteo o coloque el parámetro t.ON = 0.- Después del tercer día de incubación active el volteo y con la activación manual (botón ) lleve las bandejas al extremo superior o inferior y calcule el tiempo requerido para realizar medio giro, guarde este parámetro en t.ON.- Programa el parámetro t.OFF (minutos) de acuerdo al tiempo que requiere realizar el volteo automático.- La incubadora comenzará a realizar automáticamente un volteo de medio giro a las bandejas de acuerdo a los valores programados en los parámetros t.ON y t.OFF

Uso del Relé 2.El relé 2 permite realizar varias funciones de acuerdo a la función programada (S2.F):S2.F= 0: Temporizador cíclico usando los parámetros t.ON / t.OFFS2.F = 1: Relé 2 programado como alarma externa, operando de forma paralela a alarma Interna. de acuerdo a parámetros AL.b AL.A y SIL
Uso del Relé 3.S3.F = 0: Relé 3 apagadoS3.F = 1: Relé 3 programado como alarma externa, operando de forma paralela a alarma Interna. de acuerdo a parámetros AL.b AL.A y SILS2.F= 2: Salida de control ON/OFF con histéresis para sistema de calefacción, como por ejemplo, un horno con una resistencia auxiliar para un precalentamiento rápido.S2.F= 3: Salida de control ON/OFF con histéresis para un sistema de enfriamiento, como por ejemplo encender un ventilador extractor si la temperatura sube mucho o para combinar un sistema complejo de calentamiento / Enfriamiento a través de las salidas 1 y 2 respectivamente.
Ejemplo de uso para combinar calefacción y enfriamiento:1. Cuando la temperatura ambiente es muy alta, la temperatura interna de un sistema controlado a 37°C podría subirse, aun con el sistema de calentamiento apagado, generando un riesgo para el proceso. Para esto se puede usar la salida 3, activando un ventilador extractor que se encienda a 37.5°C y se apague a 37.0°C . En este caso se fijan los parámetros: Set point Td = 37.0°C; S3.F = 3; S3.b = 0.0 y S3.A = 0.5.
Operación
6
Deltatemp
Toque corto permite visualizar temperatura sensor 2 y tempera-tura promedio.Toque largo para Modi�car SetPoint o para ingresar a programación.
Toque breve para realizar activación Manual de Rele 2. si esta programado como tempori-zador (S2.F=0)

El usuario �nal solo tiene acceso a programar la temperatura deseada, pero el fabricante que utilice los controles en sus productos, puede programar los diferentes parámetros de control, al introducir la siguiente clave de acceso (0221), la cual le pedirá el sistema cuando lo enciende dejando presionada la tecla aumentar ( ) . En la siguiente tabla se ilustran los parámetros de programación.Para ingresar a programación presione el botón aumentar ( ) por dos segundos, se activa una indicación sonora y visual. Para avanzar de un parámetro a otro, usar la tecla aumentar ( ), para retroceder al parámetro anterior usar la tecla Disminuir ( ) presionándola ucon un toque corto. Para entrar a modi�car un parámetro presione la tecla Disminuir ( ) con un toque largo de aproximadamente 1 segundo.
Programación
7
Deltatemp
SIGNIFICADO RANGO[10ºC a SPL]
SPL Set Point Limite: Permite limitar el máximo Set Point Programable por el usuario �nal.
[25 a 125°C]
Ad1Diferencial de ajuste de Temperatura:Permite Ajustar la lectura de temperatura introduciendo el valor que se requiere para que la temperatura sea igual a la de un instrumento patrón.
[-12 a +12ºC]
SON Habilitación de alarma sonora interna. 0: Alarma apagada 1: Alarma activada
AL.bDiferencial de Alarma Baja: permite �jar un valor diferencial con respecto al set- point para generar alarmas por baja temperatura.Si no quiere generar esta alarma �je un valor diferencial grande de modo que el sistema nunca alcance el valor de temperatura calculado como:
[-0.1 a -Td °C]
Ejemplo:para �jar alarma baja un grado por debajo del Set.point, �je el valor
AL.b= -1.0°C .
AL.A
Diferencial de Alarma Alta: permite �jar un valor diferencial que se le suma al set -point, (Td+AL.A), para generarar alarmas por alta temperatura.Si no quiere generar esta alarma �je un valor diferencial grande de modo que el sistema nunca alcance el valor de temperatura calculado como :
[+0.1 a +50.0°C]
Ejemplo: para �jar alarma alta un grado por encima del set point, �je
AL.A=+1.0°C;
SIL Tiempo de retardo y silenciamiento de la alarma Sonora.
[0 a 240] min
PARÁMETRO
Td Temperatura de Control Deseada (Set-Point)
T_Alarma_Baja= Td-AL.b
T_Alarma_Alta = Td + AL.A

Programación Deltatemp
8
SIGNIFICADO RANGOPARÁMETRO
Pro* Acción proporcional. [0 a 50%]
Int* Acción Integral. (Factor dividido por 1000) [0 a 50] /1000 s
dEr* Acción Derivativa. (Factor dividido por 10) [0 a 50]/10 s
Tc* Tiempo de ciclo [ 0 a 60] seg
Pot* Potencia Máxima del equipo en fase de control PID. [10 a 100] %
S2.FFunción del relé 2
0: Relé 2 como Timer cíclico1: Relé 2 como alarma externa
t.ON* Tiempo de activación de Timer Cíclico en Salida 2. Parámetro S2.F = 1
0: Salida 2 apagada[1 segundo a 300 minutos]
t.OFFTiempo de apagado de Timer Cíclico en Salida 2.Parámetro S2.F = 1
[1 segundo a 300 minutos]
S3.b Diferencial de Control Bajo en Relé 3: Permite fijar la temperatura de Baja actuación del relé 3.
[-Td a Td+5.0 °C]Ejemplo: para fijar activación un grado por debajo del Set. point, �je el valor S3.b=-1.0°C .
S3.ADiferencial de Control Alto en Relé 3: Permite fijar la temperatura Alta de actuación del relé 3.
[-5.0 a 50.0 °C]Ejemplo: para fijar activación un grado por encima del Set. point, �je el valor S3.A=1.0°C .
GrA
Para seleccionar visualización entre Grados Celsius y Fahrenheit. Por defecto el control realiza cálculos internos en Celcius, Farenheit solo es para visualizar.
0: Indicación en Celsius1: Indicación en Fahrenheit
Recomendaciones generales de utilización:- Si no se quiere utilizar la alarma sonora y visual es mejor que sea desactivada colocando el parámetro SON = 0.- Si no se requiere utilizar la Salida del Relé 3 colocar el valor S3.F=0.
Fijación del sensor de temperatura:
Es crítico �jar bien la posición del sensor de temperatu-ra ya que de ello depende la estabilidad de la tempera-tura y su homogeneidad en todos los puntos del equipo en control. Se recomienda lo siguiente:- En un horno o incubadora el sensor debe medir la temperatura del aire en un punto medio de la cámara, evite que el sensor toque las paredes y no lo coloque directamente en la salida del ventilador o la resistencia ya que allí se pueden generar grandes diferencias de temperatura con respecto al resto de la cámara.- En un Baño María o en una aplicación donde el sensor sea sumergido es preferible utilizar un termopozo que proteja el sensor, la agitación del agua por medio de una espoleta es recomendable para mantener la temperatura homogénea, esto podría lograrlo a través del uso del relé 2 como temporizador cíclico.Si compra el equipo con un segundo sensor de temperatura, podría programar el uso de promedios de temperatura con la función I2.F = 2, de esta forma podría tener mejores resultados ya que el control lo realizar con el cálculo de la temperatura promedio de los dos sensores.* Se recomienda leer el Anexo 1 para entender el funcionamiento de estos parámetros.
S3.F Función del relé 3
0: Relé 3 apagado.1: Relé 3 como alarma externa2: Relé 3 como controlON/OFF con histéresis paracalefacción.3: Relé 3 como controlON/OFF con histéresis paraEnfriamiento.
0: sensor 2 no activo1: sensor 2 activo para monitoreo2: sensor 2 acivado, se promedia lectura de T1 y T2 para control del proceso.
i2.F Operación del sensor 2
Identidad del control en la red de monitoreoID 0: Programación de red WiFi
Conexiones e instalación Deltatemp
9
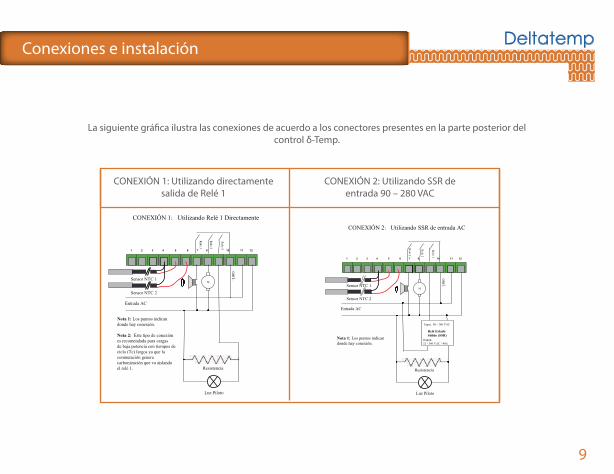
La siguiente grá�ca ilustra las conexiones de acuerdo a los conectores presentes en la parte posterior del control δ-Temp.
CONEXIÓN 1: Utilizando directamente salida de Relé 1
CONEXIÓN 2: Utilizando SSR de entrada 90 – 280 VAC
1.
1.
Dimensiones para instalación Deltatemp
10
78 mm
37 m
m
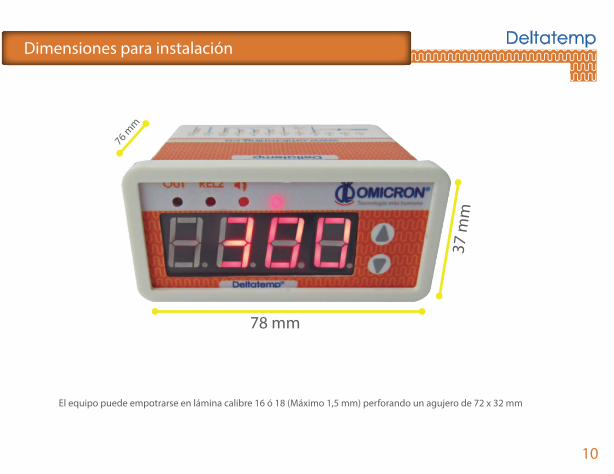
El equipo puede empotrarse en lámina calibre 16 ó 18 (Máximo 1,5 mm) perforando un agujero de 72 x 32 mm
76 mm

Deltatemp
11
Monitoreo remoto a través de Centriomega
Los controles Deltatemp vienen equipados con un chip de comunicación WiFi inalámbrica para establecer conexión de datos con la Central de Eficiencia y Automatización Centriomega el cual es un software de acceso web que permite realizar tareas de control y monitoreo remoto, llevar un registro grá�co de la temperatura y la humedad, indicar los límites máximos y mínimos admisibles, generar eventos de alarmas con indicacio-nes visuales y sonoras, enviar mensajes de alerta externa por e-mail y Mensajes de Texto (SMS) y llevar un registro histórico de las variables y las acciones correctivas y comentarios tomados cuando se presentan alarmas.
Vista global
Vista local o de equipo
Con�guración de parámetros
Anexo 1: Parametros de control PID Deltatemp
12
1. Definición de conceptos:En este tipo de controles, intervienen conceptos que es necesario de�nir para poder comprender su funcionamiento propiamente dicho.
Variable de proceso (Pv): Es la variable medida que se desea estabilizar o controlar, es decir, la temperatura actual.
Valor prefijado o Set point (Sp): Es el valor deseado de la temperatura, �jado por el usuario.
Error (E): Se de�ne como la diferencia entre la variable de proceso y el set point, Error = Sp-Pv.
Tiempo de ciclo (Tc): Es un lapso de tiempo �jo, menor al tiempo de respuesta del equipo a controlar, al cual se debe modular la activación de la salida, con el �n de que dicho equipo reciba un promedio de potencia.
Banda proporcional (Bp): Corresponde a una banda de temperatura situada por debajo de Td a lo largo de la cual, la potencia de salida variará proporcionalmente al Error, disminuyendo cuanto más cercana sea la temperatura al Sp. Esta se programa en el control como un porcentaje del Sp como la acción proporcional (Pro). Por si sola, la acción proporcional no logra llevar el sistema al valor del Sp generan-do un error estacionario.
Acción o constante derivativa (dEr): Este parámetro tiene en cuenta la velocidad de la temperatura en el tiempo. Permite “adelantar” la acción de control del mando de salida para obtener así una temperatura más estable. Por ejemplo, si la variable de proceso Pv está por debajo del Sp, pero sube muy rápidamente, entonces el control se adelanta y disminuye la potencia de los calefactores.
Acción o constante Integral (Int): Proceso que consiste en ir introduciendo una pequeña cantidad de potencia a la salida, proporcional a la sumatoria del Error medido cada segundo, generando así el "ajuste" de la potencia necesaria para mantener el equipo o sistema a controlar en su temperatura deseada (Sp).
Límite de la potencia Máxima en la salida (Pot): Este parámetro sirve para limitar la potencia máxima de salida en los calefac-tores en el rango de 10 a 100%. Este límite de potencia no se aplica en la fase de calentamiento, sino después de que el equipo ha iniciado la acción de control PID (Esto sucede cuando el Error <75% de Bp). Con este parámetro se pueden evitar sobre picos de temperatura como los generados por perturbaciones largas al sistema, tal como una puerta abierta en un horno por mucho tiempo y que luego es cerrada.
Deltatemp
13
2. Cálculo realizado para controlar la temperatura: El control Delta-Temp realiza un algoritmo de control PID de la temperatura, normalizado en el rango de [0 a 100%] expresa-do en la fórmula siguiente, para la potencia que debe suminis-trar a los elementos calentadores:
Pot = [100%(Error – Der/10*VEL + Int/1000 * ∑Error)/Bp]
Donde:
Bp (Banda proporcional) = Sp* Prop /100% VEL = Tactual – Tanterior ∑Error: Es la sumatoria del error segundo a segundo.
3. Selección de parámetros:La clave del éxito en el funcionamiento de los controles de temperatura, en una determinada aplicación, es la selección apropiada de los parámetros Pro, Der, Int, Tc y Pot que deben ser introducidos por el fabricante de los equipos que integre el control a sus productos. (El usuario �nal no tiene acceso a estos parámetros). Para esto se deben tener en cuenta los siguientes comportamientos y consideraciones prácticas con el �n de llegar a la condición óptima.
Comportamiento inestable: Se dice que un sistema y su controlador tienen un comportamiento inestable cuando después de un tiempo razonable de funcionamiento y sin ocurrir perturbaciones externas, la temperatura permanece �uctuando alrededor del Sp. Este es el caso de un control de tipo on/off o un sistema con la Bp muy pequeña.
Comportamiento estable: Es aquel en el que la temperatura se mantiene en un valor constante mientras no ocurran perturbaciones externas. Dentro de las condiciones de estabilidad existen 3 tipos de comportamientos bien definidos:
• Sistema sobre amortiguado: Tiene una velocidad de respuesta lenta y después que ocurre una perturbación, el sistema puede tardar en volver al Sp. La ventaja es que es muy estable y no adquiere comportamientos oscilatorios indesea-bles. Esta condición ocurre cuando la banda proporcional Bp es más grande de lo necesario y cuando la constante derivati-va dEr es muy grande, ya que la acción derivativa tiende a frenar la temperatura.• Sistema sub amortiguado: Posee una velocidad de respuesta muy buena, pero pueden ocurrir varias oscilaciones de cierta amplitud antes que la temperatura llegue a un valor estable. Esta condición sucede cuando Bp y dEr son pequeñas y la constate de integración Int es grande.• Sistema con amortiguamiento crítico: A esta condición corresponden los valores óptimos de los parámetros Bp, Der e Int. En este caso el sistema es bastante estable y la velocidad de respuesta es la mejor que se puede lograr.
Anexo 1: Parametros de control PID

Deltatemp
14
Los diferentes comportamientos se ilustran en las grá�cas que aparecen a continuación:
4. Consideraciones prácticas:
Además, es importante tener presente algunas consideracio-nes como:• Menor Banda Proporcional (Bp) hace más oscilatorio el sistema, ya que el control proporcional se comportará más parecido al On/Off, es decir tenderá a presentar oscilaciones alrededor de la temperatura deseada Td.• A mayor Tc, menos desgaste de los elementos de salida y de calefacción, pero siempre tiene que ser inferior al tiempo en que el sistema pierde calor llamado tiempo característico del sistema. La práctica recomendada es usar un tiempo de ciclo igual a la mitad del tiempo característico del sistema.• Normalmente Int deberá ser grande solo en sistemas que reaccionan rápidamente y pequeño para sistemas lentos con mucha inercia (por ejemplo hornos e incubadoras).
Anexo 1: Parametros de control PID
Medellín - Colombia Carrera 46 · 38 / 62 oficina 502
Teléfono: (+574) 2 32 83 81 Celular: (+57) 317 4 36 50 62
E-mail: [email protected]