control-monitoring and protection of hv...
TRANSCRIPT

E/CT 165 first issed, May 1995
J.Y. Blanc
He graduated as an engineer fromSUPELEC in 1979. He joined MerlinGerin in 1981 as Medium Voltagedielectric engineer. Still in theMV Division, he was then in turn asproject manager for the developmentof:- Fluair range primary substationsand equipment,- SF set built-in protection circuit-breakers.He is currently in charge ofdevelopment of MV primarydistribution and switchgear.
n° 165control/monitoring andprotection ofHV motors

Cahier Technique Merlin Gerin n° 165 / p.2
Cahier Technique Merlin Gerin n° 165 / p.3
control/monitoring and protection ofHV motors
contents
1. Reminder of the various types of Asynchronous cage motors p. 4Asynchronous slipring p. 5rotor motorsSynchronous motors p. 6Sizing tolerances p. 6Dielectric withstand and tests p. 7
2. Classical HV starting processes Direct stator starting on p. 8full voltageStator starting on reduced p. 8voltageStartor starting with capacitors p. 9Rotor starting p. 10Choosing the starting mode p. 11
3. Control and monitoring equipment Electromechanical solutions p. 13Electronic solutions p. 15
4. Protection of HV motors Main fault types p. 18Protection principles p. 18Technological evolution p. 22
Appendix 1: determining motor Calculation hypotheses p. 23Overall approach p. 23
Appendix 2: coordination of protection devices p. 25Appendix 3: bibliography p. 26
Unit power of rotating machinesfrequently exceeds 100 kW in industryand large tertiary. In such cases and/orif the length of the supply line isparticularly long (voltage drops,losses…), use of high voltage motors isadvantageous.The purpose of this Cahier Techniqueis to analyse and compare thesemotors, their starting systems and thevarious protection devices which maybe used, in order to simplify technicalchoices.
AC motors
starting mode
Cahier Technique Merlin Gerin n° 165 / p.4
current
torque
0
1
2
2
4
25 % 50 % 75 % 100 % (N/Ns)
1
25
4
6
3
2
1
Cn
In
current
torque
0 25 % 50 % 75 % 100 % (N/Ns)
Id
1. reminder of the various types of AC motors
Both high and low voltage AC motors,offer a large variety of electrical,dynamic and technologicalcharacteristics. However, except for asmall number of motors used for highlyspecific applications, they can bedivided into three families, namely:c asynchronous cage motors;c asynchronous slipring rotor motors;c synchronous motors.
They differ from each other in:c starting current and torque values;c speed variation in normal operation;c power factor and efficiency values asa function of load.
HV motors are supplied with a voltagerarely exceeding 7.2 kV, their powerranges from 100 kW to over 10 MW,with an average of 800 kW.
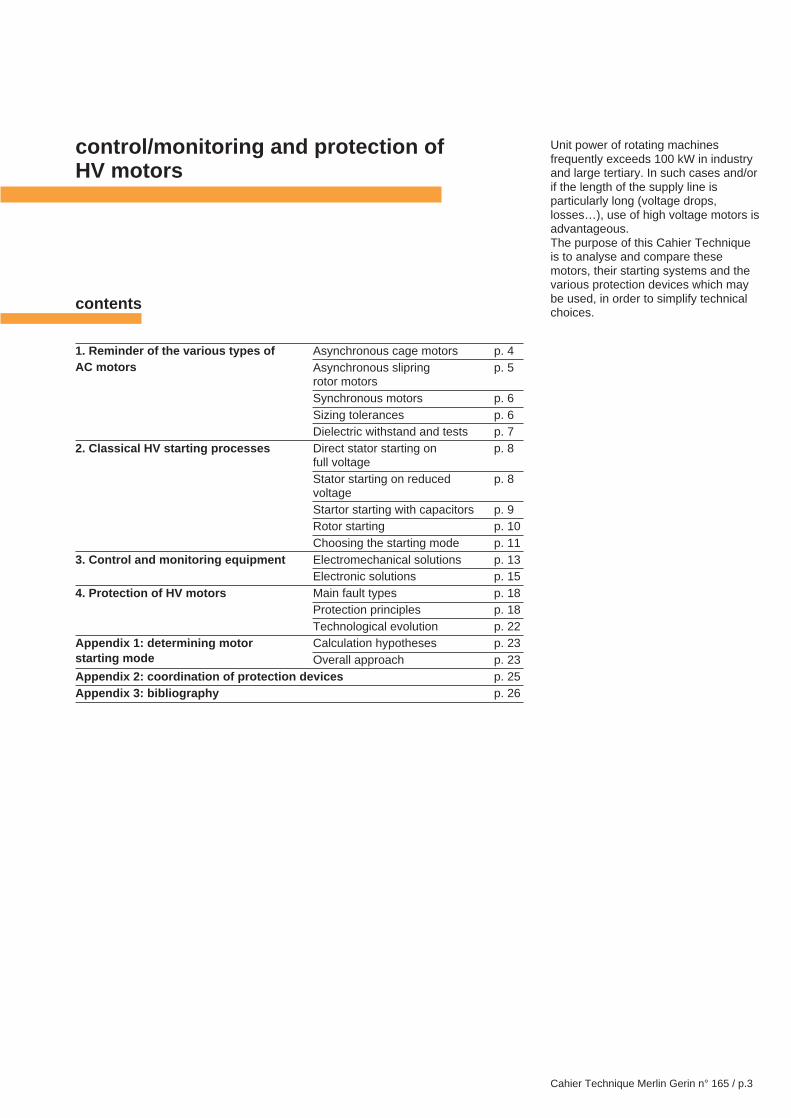
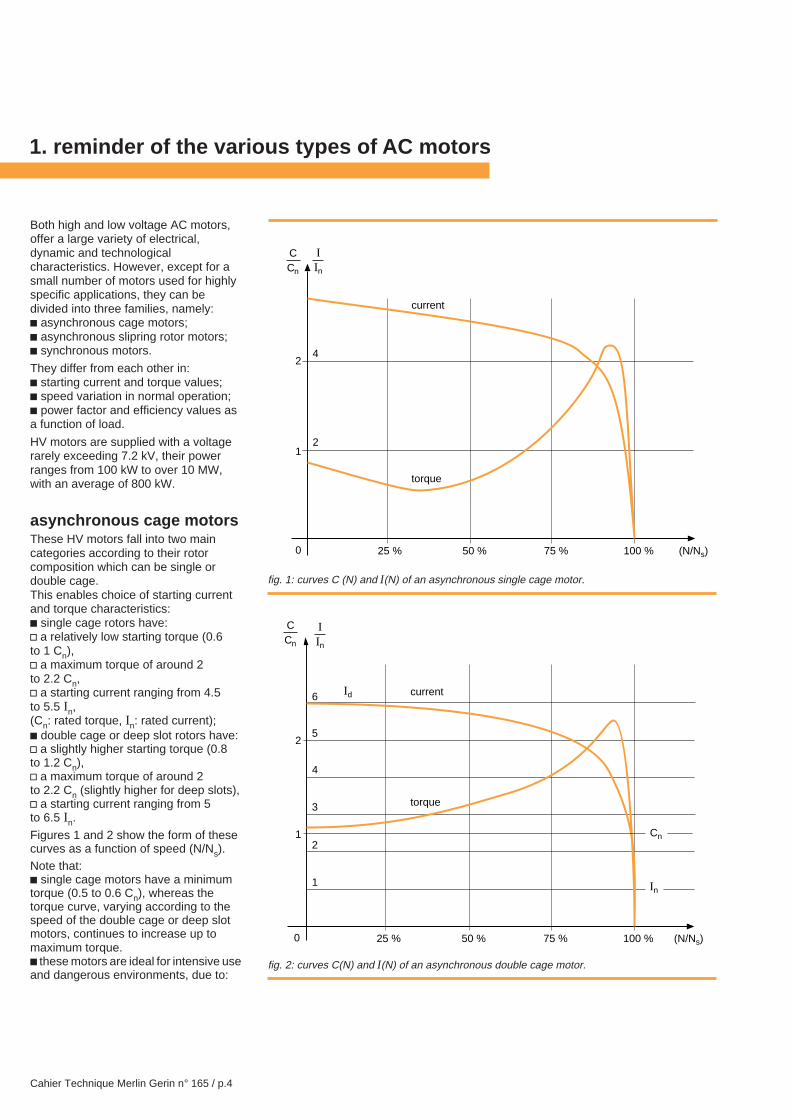
asynchronous cage motorsThese HV motors fall into two maincategories according to their rotorcomposition which can be single ordouble cage.This enables choice of starting currentand torque characteristics:c single cage rotors have:v a relatively low starting torque (0.6to 1 Cn),v a maximum torque of around 2to 2.2 Cn,v a starting current ranging from 4.5to 5.5 In,(Cn: rated torque, In: rated current);c double cage or deep slot rotors have:v a slightly higher starting torque (0.8to 1.2 Cn),v a maximum torque of around 2to 2.2 Cn (slightly higher for deep slots),v a starting current ranging from 5to 6.5 In.
Figures 1 and 2 show the form of thesecurves as a function of speed (N/Ns).Note that:c single cage motors have a minimumtorque (0.5 to 0.6 Cn), whereas thetorque curve, varying according to thespeed of the double cage or deep slotmotors, continues to increase up tomaximum torque.c these motors are ideal for intensive useand dangerous environments, due to:
fig. 2: curves C(N) and I(N) of an asynchronous double cage motor.
IIn
CCn
fig. 1: curves C (N) and I(N) of an asynchronous single cage motor.
CCn
IIn

Cahier Technique Merlin Gerin n° 165 / p.5
fig. 4: curves C (g) of an asynchronous slipring rotor motor.
v the simplicity of rotor design inshort-circuit providing them with anexcellent mechanical and electricalrobustness,v absence of brushes.These two features allow maintenanceto be reduced to a minimum.
The torque characteristics ofasynchronous cage motors areespecially suitable for machines suchas centrifugal pumps, compressors,converter sets, machine-tools and fans.
However, all these motors have thedrawback of a relatively low powerfactor, around 0.8 to 0.9 on full load,and even less when they are runningon low load (see fig. 3).
If asynchronous motor installed poweris high, reactive power compensation isrequired. This may either be global, foreach set of motors or for each motor(large units).
asynchronous slipringrotor motorsThe rotor winding of these motorsconnected to sliprings means theresistance of this circuit can bemodified by introducing externalresistances.In the motor stability zone,corresponding to the positive slope ofcurve C = f (g) (see fig. 4), the slippage"g" is proportional to the rotorresistance:
g = 1A
Rr C
where g % = Ns − N
Ns 100
where:Ns : synchronous speed,N : operating speed.
A = 3V2 pω
ML1
= constant
where:V: phase to neutral supply voltage,p: number of pole pairs,ω: pulsation of supply currents,M: reciprocal stator-rotor inductance,L1: total stator choke,(L1 = M + Ls)Rr: rotor resistance = rotor inherentresistance + external resistances,C: motor torque.
cos ϕ
0 2/4 3/4 4/4
0.5
0.6
0.7
0.8
0.9
cos ϕηη
(P/Pn)
fig. 3: efficiency curves η (P) and power factor curves cos ϕ (P) of an asynchronous doublecage motor.
CM
C
Rr R'r > Rr R''r > R'r
Cn
Cd
C'd
C''d
10.50
0.51 2 g
operationon generator
operationon motor
operation inregenerativebraking
rotor stability zonein short-circuit

Cahier Technique Merlin Gerin n° 165 / p.6
c the power factor which may be set bythe exciting current.Technologically, they are identical toAC generators.
In order to obtain asynchronous torqueand avoid oscillations, the rotors areequipped with a damping cage. Thiscage means synchronous motors canbe started with a low load torque insimilar fashion to asynchronous singlecage motors (they have practically thesame characteristic torque and currentcurves). To avoid surge voltages in theexciting circuit, this circuit is shuntedduring starting and on tripping by aresistance with a value chosenbetween 5 and 10 times the resistanceof the exciting circuit.
In view of the fact that theasynchronous torque tends to zero onapproaching synchronous speed,coupling to the network when motorstarting is complete cannot take placeat synchronous speed as is the case forAC generators. The result is invariablya transient state varying according tothe speed acquired at the end ofstarting and motor power. To limit thistransient state:c either use a relay to monitor slippageby measuring frequency of the rotorcurrent passing through the startingresistance. This relay controls excitingcircuit supply when slippage is at itslowest.This device is practically indispensablewhen the synchronous motor accountsfor a large part of total installed power.c or apply the exciting current in twostages, automatically or manually.
The exciting sources can be eitherseparate:c motor set, exciter;c thyristor rectifier;or placed at the end of the motor shaft:c reversed generator;c rotating "diode rectifier and armature"reversed AC generator.
The techniques most frequently usedare the thyristor rectifier and the"rotating diodes".The latter does away with brushes,removes the exciting cubicle and, inaddition, is often fitted with asynchronisation and recouplingmechanism should synchronism fail.
These motors can supply reactiveenergy by increasing the excitingcurrent. This characteristic, whichenables compensation of networkreactive loads, is one of the mainreasons these motors are chosen.
The curves in figure 5 show statorcurrent variation as a function ofexciting current for a given constantload (Mordey curves). Use of this typeof motor for small powers is fairly rare.On the other hand, it is frequently usedabove 2,000 kW for its excellentefficiency and control of its powerfactor. In the case of highly regularmovements, synchronous motors are anecessity. However, the machinesbeing driven must have a relatively lowload torque during starting, and sizingof the dampening cage limits startingrate.
sizing tolerancesThe electromechanical characteristicsof motors are defined by standardIEC 34-1. In the case of certain ratedcharacteristic values, the standarddefines the tolerances to be compliedwith by the manufacturer. It is useful tobe familiar with these tolerances since,for certain characteristics, they directlyaffect the choice of motor andequipment power and the setting of theprotection devices.
The table in figure 6 gives thetolerances of the main characteristicvalues.
By decreasing external resistance onstarting, the characteristic C (g) istranslated and the starting torqueadapted to the torque of the machinebeing driven. Note that maximumtorque value does not depend on rotorresistance.
Moreover, for small slippages, rotorcurrent is inversely proportional to rotorresistance. Its amplitude is given by:
I2 = B g
Rr
where
B = V ML1
.
Stator current follows the same law,except for the winding ratio and themagnetising current.
Consequently, the choice of initial rotorresistance solves virtually all theproblems concerning high startingtorque and inrush current on thenetwork and ensures these tworequirements are satisfied. The variouspossibilities for using asynchronousslipring rotor motors make themsuitable for driving machines with highstarting torque such as crushers,mixers, conveyors, etc.
Moreover, machines requiring highregenerative braking also use this typeof motor.
Just as for asynchronous cage motors,the power factor in normal operation isrelatively low: this characteristic and thepresence of sliprings and rotorresistances mean these motors areincreasingly replaced by double cage ordeep slot motors.
Figure 4 represents the characteristicC (g) curves, according to rotorresistance value and the stabilityzones. These curves show theadvantage of introducing a highresistance in the rotor circuit as ameans of obtaining efficientregenerative braking.
synchronous motorsThe main differences withasynchronous motors are:c their constant speed (synchronousspeed);c the rotor circuit supplied with DC;
fig. 5 synchronous motor: Mordey curves.
0 (i) excitation
(I) stator
stabil
ity lim
it full load1/2 load
1/4 load
cos ϕ AR cos ϕ AVcos ϕ = 1

Cahier Technique Merlin Gerin n° 165 / p.7
dielectric withstand andtestsMotors, just like all electrical networkcomponents, are subjected to a varietyof surge voltages. They are particularlysensitive to steep front surge voltagesor high frequency since they are"jammed" by the first turns of the statorwindings.
Switching surge voltagesThese are the result of transientphenomena occurring during changesin status in the supply network.The following phenomena, specific toinductive circuits and thus to motors,must be taken into consideration:c current pinch-off on current breaking;c multiple re-ignitions on breaking andprearcing on current making if thebreaking device is capable of breakingthe high frequency currentscorresponding to these phenomena.
Steep front surge voltagesThese are the result of direct or indirectlightning strokes. They spread onto thenetwork, creating a dielectric stresswhich, even when limited by the use ofsurge arresters, can be considerable.Surge voltage is studied in detail in"Cahier Technique" n° 151"Overvoltages and insulationcoordination in MV and HV" andspecial motor sensitivity in"Cahier Technique" n° 143 "Behaviourof the SF6 MV circuit-breakers Fluarcfor switching motor starting currents".To check the motor’s capacity towithstand to these various surgevoltages, the motors undergostandardized tests performed asdefined by IEC 34-1 standard.
The test voltage is applied between thewinding being tested and the body ofthe machine to which the magneticcircuits and all the other stator and rotorwindings are connected.
Two types of tests are stipulated in thestandards: standard frequency testsand impulse withstand tests.
Standard frequency testWithstand to switching surge voltagesis checked in compliance with standardIEC 71, by the standard frequencywithstand test. Testing commenceswith a voltage of less than U/2 which isgradually increased up to 2 U + 1,000V,at which level it is applied for oneminute.
For the stator, U is the specified supplyvoltage. For the rotor, U is the voltagewhich appears, with the rotor circuitopen, when the specified statorsupply voltage is applied with therotor locked in rotation. If the motoris reversible (change of rotationdirection of motor already started), the
test voltage applied to the rotor will be4 U + 1,000 V.
Impulse withstand testThis test consists in applying animpulse voltage representative oflightning:c buildup time: 1.2 µs;c dropdown time at Upeak/2: 50 µs;c test voltage:Upeak = 4 U + 5,000 V.
The windings are subjected to anumber of positive and negative waves.
Impulse withstand tests are notcurrently mandatory in standards, asthey can lead to early ageing ofarmature and winding insulation.More generally, the dielectric testsmust not be repeated; if a second testis performed, it will be carried out at80 % of the voltages indicated above.
value tolerance
asynchronous motors
current with locked rotor + 20 % of currentand short-circuited (no lower limit)
torque with locked rotor - 15 % to + 25 % of torque guaranteed
minimum torque during starting - 15 % of torque guaranteed for cage motors Cd u ata third of rated torque and i at half of torque withlocked rotor, at full voltage
maximum torque - 10 % of torque guaranteed provided that once thistolerance is applied, the torque remains u 1.6 timesrated torque
synchronous motors
current with locked rotor + 20 % of value guaranteed
torque with locked rotor - 15 % to + 25 % of value guaranteed
pull-out torque - 10 % of value guaranteed provided that once thistolerance is applied, the torque remains u 1.35 timesrated torque (1.5 for synchronous motors with salientpoles)
fig. 6: tolerances on the main characteristic values as in standard IEC 34-1.

Cahier Technique Merlin Gerin n° 165 / p.8
0 0.2 0.4 0.6 0.8 1
0.2
0.4
0.6
0.8
1
2. classical HV starting processes
The main HV motor starting processesare as follows:c direct stator starting on full voltage;c stator starting on reduced voltage bystar-delta connection, by reactance orby autotransformer;c stator starting by capacitors;c rotor starting.
direct stator starting on fullvoltageThis starting mode is used forasynchronous motors with cage rotorand for synchronous motors.
Current peak on starting is around 4to 7 In, according to motorcharacteristics, and can last for roughly1 to 10 seconds depending on themoment of total inertia (motor +machine), motor torque and loadtorque.
If this starting mode is used, thenetwork must be able to withstand theabove current overload withoutdisturbing the other loads, and themachine being driven must be able towithstand the mechanical impact due tothe motor torque. The simplicity of bothequipment and motor and the resultingsavings mean that this mode is verypopular and even recommendedprovided that voltage drop on thenetwork on start up is acceptable. Thedecisive factor lies in the motor power/short-circuit power ratio.
stator starting on reducedvoltageStar-delta startingThis starting mode is used to reduce:c current in a ratio of e;c starting torque by a third.
It is used in LV and for low powers, butrarely in HV due to the high currentpeaks when moving to delta. In thiscase it is replaced by reactancestarting.
Voltage reduced by resistanceCommonly used in LV, it is rarely usedin HV due to the Joules to be dissipatedand resistance insulation problems.
Voltage reduced by reactanceThis starting mode (refer to powerdiagram, figure n° 8) is the one whichreduces current inrush on the networkin the simplest manner. Since motorstarting torque is low, the machinesbeing driven must have a relatively lowload torque during start up:compressors, centrifugal pumps,converter sets, etc.In point of fact, asynchronous motortorque varies according to square of thesupply voltage , whereas the absorbedcurrent remains proportional to thisvoltage.
C'd = Cd Ud
Un
2
where :C'd: starting torque with reducedvoltage,Cd: starting torque with full voltage,Ud: starting voltage,Un: rated operating voltage.
I'd = Id Ud
Un
where:I 'd: starting current with reducedvoltage,Id: starting current with full voltage.These relationships can also beexpressed using the ratedcharacteristics as follows:
I'dIn
= Id
In Ud
Un.
The curves in figure 7 give the ratiovariations as a function of
the ratio Ud
Un.
Voltage at the motor terminalsincreases gradually during starting. Theresulting start up is smooth.c operation and schematic diagram:v first stage:operation on reduced voltage byclosing the line contactor CL,v second stage:normal operation by closing the short-circuit contactor CC;c determining a starting reactance(see fig. 9)
Starting voltage is determined by themaximum current inrush l'd authorisedon the network:
Ud = Un I'dId
.
The phase-to-phase voltage drop in thereactance has the following value:
Un
→ − Ud
→ = j 3 L ω I'd
→.
The diagram in figure 9 shows that thisrelationship can be expressed in anarithmetic form for asynchronousmotors, since the power factor at theinitial moment start up moment isinitiated is virtually the same as thepower factor of the starting inductance.Therefore:
L ω = Un − Ud
3 I'd.
Knowledge of start up time andoperation rate is required to determinereactive power.
Voltage reduced by autotransformerThis starting mode sometimes makes itpossible to reconcile reduction ofcurrent inrush on the network andmotor torque value. In point of fact, ithas the advantage of reducing currentinrush according to the square of thewinding ratio:
fig. 7: graphs showing start-up on reducedvoltage (by reactance or star-delta).
Ud
Un
I'dId
and C'dCd
C'dCd
I'dId

Cahier Technique Merlin Gerin n° 165 / p.9
I'd
ϕ d
Un
Ud
rating of the neutral point contactor tobe reduced;c there is an alternative version of thisconfiguration in which the neutral pointcontactor is removed. This version isnot recommended since the move fromreduced to full voltage necessites themotor-network link be cut. In view of therelatively short switching time, and theresidual voltage at the motor terminals,a current inrush exceeding startingcurrent can ocur on transfer to normaloperation. This is unacceptable for boththe network and the motor and can leadto the tripping of the protection devices.
stator starting withcapacitorsThis process enables motor full voltagestarting characteristics to bemaintained. It is mainly used forkeeping the starting torque ofsynchronous motors constant duringstart up, for example in cement worksand crushing plants.
Capacitors, as well as motor, supplypart of the reactive energy during thestarting phase: the motor power factoris small at this stage. Power inrush on
I'dIn
= Id
In
Ud
Un
2
C'dCn
= Cd
Cn
Ud
Un
2
where:I 'd: starting current on network side withreduced voltage.
These relationships are used todetermine the value of reduced voltageauthorised on the network, as a function
of the ratio Ι'dΙn
or of the ratio C'dCn
authorised by the machine being driven.
The curve in figure 10 gives the
variation of Ud
Un as a function
ofΙ'dΙn
orC'dCn
.
c operation and schematic diagram(see fig. 11)CL: line contactor,CC: short-circuit contactor,CPN: HV neutral point formationcontactor,AT: autotransformerv first stageoperation on reduced voltage byclosing CPN which causes CL to close,v second stageoperation in inductance by opening CPN,v third stageoperation on full voltage by closing CC.
Remarks:c in theory the second stage is short(around one second) since in mostcases it is a slowing-down time;Use of an autotransformer with air gapsconsiderably reduces this fault, butrequires knowledge of the value of thecurrent absorbed by the motor at theend of the first stage;
c the move to full voltage invariablyresults in a transient state whoseduration varies according to the speedacquired at the end of the first stageand the value of the current absorbed;
c the current flowing through theneutral point on start up is equal to thedifference between the motor currentand the line current, excluding themagnetising current of theautotransformer. This enables the
fig. 9: vectorial diagram to determine L.fig. 11: power diagram: starting byautotransformer.
fig. 10: graphs showing start up byautotransformer on reduced voltage.
0 0.2 0.4 0.6 0.8 1
0.2
0.4
0.6
0.8
1
I'dId
and C'dCd
Ud
Un
fig. 8: power diagram: starting by reactance.
J L ω I'd→
3
M
neutral point
AT
3L
CL CC CPN
3L
CC
CL
M
3L
L
j

Cahier Technique Merlin Gerin n° 165 / p.10
the network is reduced accordingly(see fig. 12).This technique is tricky to implementand calls for a study of the motor andcapacitors to avoid resonance andsurge voltage (due to motor self-excitation), as well as mechanicaloscillations on the transmissionsystem.
Moreover, control equipment must bechosen especially for capacitorswitching.
rotor startingThis starting mode solves virtually allthe problems which may occur onstarting, namely:c reduction of current inrush on thenetwork with increase in motor torque;c adaptation of motor torque to loadtorque;c long, progressive starting (e.g. forloads with high inertia).This mode can only be used forasynchronous slipring rotor motors andfor synchronous induction motors (itsuse is increasingly rare in industry).
It is particularly used for load starts.
Example of a rotor start in n timeThis start up is illustrated in figures 13and 14. Motor torque varies betweentwo values at each notch. The lowervalue is taken as being equal to therated torque. At each notch, rotorresistance changes value and thetorque-speed characteristic evolves. Inthe last stage, rotor resistance is simplyequal to the rotor internal resistance.c first stagestator supply and starting on full rotorresistance by closing CL;c second stageshort-circuiting of the first section of therotor resistance by closing C1;
c third stageshort-circuiting of the second section ofthe rotor resistance by closing C2;
c Nth stageshort-circuiting of the n-1 section of therotor resistance by closing Cn-1.
The number of stages, or notches, n isalways greater by 1 than the number ofsections or contactors.
This number n is determinedapproximately by the formula:
n = log gn
log CnCp
or by Cn
Cp = gn
n
where:Cp= peak torque,gn = rated slippage.
According to each case, n can bededuced from Cp, and vice-versa.
Complete determination of rotor startingequipment calls for knowledge ofoperation (hourly rate and startingtime). Lack of standards for HV motorsmeans this equipment is determined ineach individual case by specialists.
RemarkA linear start is sometimes required.This calls for power electronicsenabling monitoring of rotor energy: forexample using a Graëtz bridge and achopper to make a continually variableresistance (see fig. 15).
fig. 13: power diagram: rotor starting.
fig. 12: vectorial diagram for starting bycapacitor.
fig. 14: symmetrical rotor starting diagram.
power suppliedby the network
active power
power suppliedby capacitors
apparentmotor poweron starting
inductivereactivepower
M
neutral point
3L
CL
3L
C1
C2
Cn - 1
4th 3rd 2nd stage 1st stage
0 1 g
Cn
Cp
CM
C
gn g4 g3 g2 g1

Cahier Technique Merlin Gerin n° 165 / p.11
C
C
3 3
C
C
3
C
3 n
3 n
3 n
n
n
characteristics examples
constant torque piston compressor
parabolic torque pump:valve opened
- - - - valve closed
high breakaway crushertorque
Starting conditionsIn view of the required startingcharacteristics, it is necessary to checkthat starting can take place in correctlyas far as motor torque, current inrushand starting time are concerned, for thestarting techniques underconsideration:
c motor torque is always greater thanload torque (see fig. 17);c current inrush on the network and thecorresponding voltage drop areacceptable to the network;c starting time is compatible with theequipment used.
Approximative calculation of startingtimeOperation of the motor-driven machineassembly is governed by the followingmechanical equation:
Cm − Cr = J dωdt
where:Cm: motor torque with Un voltage,Cr: load torque,J: inertia of rotating frames (motor andmachine driven),
dωdt
: angular acceleration.
Angular velocity varies from 0 to nthroughout starting time ∆t. Moreover, amean accelerating torque Ca, equal tothe mean difference between Cm andCr can be defined:
This results in Ca = (Cm - Cr) mean
= J (ωn − 0)
∆thence:
∆t = J ωn
Ca.
Bearing in mind that real motor torquevaries according to the square of itssupply voltage:
C'mCm
= Ureal
Un
2
with real voltage.
C’m = motor torque with real tension.Reducing this voltage will thus reduceCa, hence increasing starting time.
fig. 16: rreminder of load torque curves of machines to be driven (loads). fig. 17: case of non-starting (C'm < Cr).
choosing the starting modeChoice of starting mode is conditionedby ensuring that the motor torque andthe load torque of the load are properlymatched.
Knowledge of the load torque isrequired (see fig. 16).
torque
1.8
0.9
0speed
ω
Cm
C'm C'r
CCn
NI
I0
R1
I
N0
R2
H
L
- -
+ +N
M
3L
tachometer dynamo
fig. 15: setting speed by rotor chopper.

Cahier Technique Merlin Gerin n° 165 / p.12
Starting mode selection tableThe table in figure 18 summarises theadvantages and disadvantages of themain starting modes for the variousapplications.
For a given torque, the currentabsorbed on the network is establishedin the following increasing order:c rotor starting;c starting by autotransformer;
c starting by stator impedance;c direct starting.
Choice of starting mode calls for goodcommunication between the electricalenergy supplier and the manufacturerof the motor and machine being driven.
The vital characteristics for making thischoice are:c supply network power and maximumauthorised current inrush;
c motor torque and current at fullvoltage as a function of rotation speed;c load torque of the machine driven(see fig. 16);c moment of inertia of the rotatingframes.If the supply network power/motor powerratio is less than 5, particular care mustbe paid to choice of starting mode andchoice of coordination of the protectiondevices (see appendices 1 and 2).
fig. 18: starting mode selection table for the most common applications.
application application starting mode controlled by advantagesneeds characteristics disadvantages
permanent or machines requiring direct 1 or 1 simplicity,quasi-permanent high start torque less investment.process i 1/jour on starting:frequent starts > 1/day motors with low current direct c high torque;
inrush or low power 1 c high current inrush,;c high mechanical stresses.
pumps, fans, machines starting stator 2 reduction of current inrushcompressors, with low torque by reactance on startingfrequent starts (possible adjustment).optimisation of when starting current stator by 3 optimisation of torquestarting characteristics must be reduced, but autotransformer (reduced) and of current inrush
the necessary starting on startingtorque maintained (possible adjustment).
optimisation of the most difficult starts rotor generally small current inrush andhigh torque 3 high starting torque.starting characteristics

Cahier Technique Merlin Gerin n° 165 / p.13
3. control and monitoring equipment
The function of this equipment isthreefold:c energising and stopping (control);c disconnecting the motor should afault occur (protection);c monitoring the motor (monitoring).
When we talk about monitoring, thisimplies the equipment is capable (ornot) of:c initializing the start (starting sequenceautomation);c acting on motor speed;c supplying information on motorelectrical status and contributing toprotection.
The monitoring function chiefly relies onpower electronics and low currents(digital technology); it is currently beingfully developed. Protection ofHV motors will be dealt with in the nextchapter.
electromechanicalsolutionsThe choice between the variousdevices (switch, circuit-breaker orcontactor) depends on:c operation rate;c electrical endurance;c motor power.The main breaking devicecharacteristics are summarised in thetable in figure 19.
Fuse-switchesBy their very design, the breakingcapacity, mechanical and electricalendurance of switches is low. Thislimits their use to small powers(In = approx. 50 A - 5,500 V) andto rates of two to three operations aday.
Moreover, the low breaking capacity ofthese devices makes choice ofprotection devices tricky.
Circuit-breakersCircuit-breakers are generally used forhigh motor powers of more than 300 A,with a small operation rate, and foroperating voltages of more than 6.6 kV.Their use can naturally be extended tolower powers, operable by switch orcontactor.
Fuse-contactorsc operation rateTheir simple control mechanismcombined with the robustness andsimplicity of their contacts meancontactors have a high operation rate.This rate cannot be withstood by circuit-breakers, even special ones, and evenless so by switches.Some installations use contactors withmechanical latching to do away withpermanent consumption of the closingelectromagnet. This may reduceendurance as a result of the greatercomplexity of the kinematic chain.c network short-circuit powerThis factor does not really affectcontactors thanks to the presence offuses placed immediately after theisolating switch or next to thedisconnecting contacts on the busbarside. These fuses with their highbreaking capacity, limit the short-circuitcurrent.This special feature means that,if network power is increased, themotor feeder cubicles can bemaintained. The busbar supports arestrengthened if required.
FusesFuse rating is determined according to:c rated current In;c the Id/In ratio (Id = starting current);c starting time determined using thechart in figure 20 page 14.
Finally, it should be pointed out thatfuses protect the motor againstovercurrents roughly five times greaterthan motor rated current and that theymust be combined with additionalprotection devices (thermal relays, etc.see "protection device" chapter).
Current transformersThe increasing use of digital protectiondevices means unconventional currentsensors can be used (e.g. Rogowskitoroids). These sensors have theadvantage of being linear and thusdelivering an accurate signalthroughout the useful current range.
They present no saturation or thermalproblems, as is sometimes the casewith classical Current Transformers(see "Cahier Technique" n° 112 "Thebreaking process with a Fluarc SF6puffer-type circuit-breaker").
Special features due to use of fusesor circuit-breakersc operation in single-phase due to fusemelt, with the striker not working.
Today striker reliability is such that therisk is slight. Their dependability maybe increased still further by use of anadditional protection device(undervoltage or unbalance relay).
fig. 19: breaking device application field.
device mean rate endurance acceptable motornb operations power
fuse-switch low: 2-3/day 2,000 low i 50 Acircuit-breaker low: 10/day 10,000 high
u 7.2 kVA> 300 A
fuse-contactor high > 10/h > 100,000 average i 300 A

Cahier Technique Merlin Gerin n° 165 / p.14
fig. 20: fuse determination chart.
0.01
0.02
0.03
0.04
0.05
0.1
0.5
1
5
10
50
100
t seconds
100A 125A 160A 200A 250A
rating of 7.2 kV fuses
example:motor In = 100 AId = 6 . Intd = 5 sfuse rating = 200 A
motorAmp In
10
20
30
40
5060708090
100
150
200
II d
= 4
I n I d =
5I n I d
= 6
I n I d =
7I n

Cahier Technique Merlin Gerin n° 165 / p.15
c discrimination with upstreamequipment.This can be hard to achieve when both:v the fuses used have a high rating(200 A or 250 A),v and the feeder protected by thesefuses accounts for a large fraction ofthe power supplied by the main circuit-breaker (see fig. 21 and 22).
However, the high breaking capacity ofthe Rollarc contactors combined withthese fuses allows the use of slightlytime delayed overcurrent relays, thusensuring discrimination. Discriminationis easier to achieve if the motor feederis protected by circuit-breaker butsince, for high short-circuit currents thecurrent is not limited, there is anincrease in thermal stresses.
c surge voltagesSome types of device, in particularvacuum breaking devices, generatesurge voltages on motor energising andstopping (due to their capacity to breakhigh frequency currents, resulting forexample from the current pinch-offphenomenon - see "Cahier Technique"n° 143).In order to prevent these surgevoltages progressively damaging motorinsulation, manufacturers place ZnOtype surge voltage limiters in theequipment if required.
It can be concluded that today'selectromagnetic solutions are reliable,robust, economic and entirely suitablefor most applications.
electronic solutionsThese provide users with additionalpossibilities and advantages such as:c variable speed;c possibility of speed regulation;c high operation rate;c energy savings.The electronic solution is rarely usedjust for starting.Before dealing with standard cases ofelectronic devices, it should be pointedout that their use calls for a certainnumber of constructive precautions atmotor level:
fig. 21: protection diagram showing a high current motor feeder.
fig. 22: discrimination diagram for a high current motor feeder.
c safety margin in temperature rise dueto harmonics: a 15 % margin on currentis generally sufficient;c forced ventilation is recommended(motors can run at low speed);
c reinforced insulation between turnsdue to the high voltage gradientsgenerated by thyristor switching (whichmay reach the magnitude of impulsewithstand test ones).
������
t
I
contactorbreakingtime
contactorovercurrentrelay
contactorbreakingcapacity
circuit-breakingmelting curve
remain circuit-breakerovercurrent relay
discriminationloss
M
overcurrentrelay
circuit-breakingcontactor
maincircuit breaker
overcurrentrelay

Cahier Technique Merlin Gerin n° 165 / p.16
The devices described below are theones most frequently used in mediumvoltage. Only the general principles arepresented.
The table in figure 23 gives an idea ofthe adequations between the type ofspeed controller, the type of motor andthe type of load driven.
Autonomous rectifiers/invertersWith their capacity to deliver variablevoltage and frequency, they guaranteecomplete control of motor speed andtorque.
A reminder for asynchronous motors:c torque is proportional to U2 if f and Nare constant;c torque is inversely proportional to f fora given voltage and speed.
There are three types of autonomousrectifiers/inverters.
c voltage rectifier/inverterv the thyristor rectifier sets voltage,v the thyristor inverter suppliesAC current at variable frequency.
This configuration is also used byUninterruptible Power Supplies (UPS)used in LV to supply computers. Theonly difference is that frequency andvoltage are fixed.
c rectifier/inverter with Pulse WidthModulation (PWM)v the diode rectifier supplies theinverter,v the inverter generates voltage pulsesenabling reproduction of a sine wave
with variable period and amplitude (seefig. 24).c current rectifier/inverter (switch)v the thyristor rectifier combined with asmoothing choke acts like aDC generator,v the inverter switches current in turn inthe motor windings using capacitors.Motor frequency and thus speeddepend on switching speed.A few elements of comparisonbetween these three types ofrectifiers/inverters:c voltage inverterv suitable for high reactance motors,v often requires a filter between inverterand motor,
v enables regenerative braking if therectifier is reversible.c the PWM inverterv allows a wide range of speeds,v maximum speed limited by themaximum switching frequencyauthorised by the inverter thyristors.Use of power transistors (IGBT) makesit possible to work at far higherfrequencies but at lower powers,v reversible operation possible (tworotation directions).c the current switchv suitable for low reactance motors,v enables operation in the fourquadrants.
motor loads speed variations power overall speed controllerefficiency type
asynchronous pumps, fans, 0 % to over 100 % a few 10 kW 0.85 to 0.90 autonomousor synchronous compressors, extruders to a few 100 kW rectifier/inverterasynchronous same 60 % to 100 %* a few 100 kW 0.90 to 0.95 subsynchronousslipring to a few MW cascadesynchronous same 0 % 100 kW to a 0.90 to 0.95 selfcontrolled
centrifugal machines to several times 100 % few 10 MW rectifier/inverterTGV bogies(high speed)
asynchronous crushers, rolling 0 % to ± 33 % 100 kW 0.85 to 0.90 cyclo converteror synchronous mills, cement kilns to a few 10 MW
(low speed)*: 100 % corresponds to relative speed at 50 Hz
fig. 23: application areas of electronic speed controllers for AC motors.
fig. 24: generation of variable voltages and frequency with PWM speed controllers.
U
U
0
0
t
t

Cahier Technique Merlin Gerin n° 165 / p.17
Subsynchronous cascadeAsynchronous slipring rotor motors arenormally supplied by the network.Speed is adjusted using the rotorcurrent by means of a rectifier/inverterset. The rectifier draws off energy fromthe rotor circuit, thus increasingslippage. The energy drawn offdepends on the conduction setting ofthe thyristors of the inverter whichreinjects energy into the network (seefig. 25). The subsynchronous cascadeenables continuous speed variationwith a maximum slippage ofaround 40 %.Converter set power is low comparedwith motor power, and the energyregenerated results in outstandingoverall efficiency.Note that the converter is put intooperation after starting by rotorresistance.This assembly can operate at speedshigher than synchronous speed(supersynchronous) in the case ofdriving loads.Selfcontrolled rectifier/inverterThe motor stator phases (in this casesynchronous) are supplied in turn justas for the current switchingautonomous rectifier/inverter.Switching from one stator phase to thenext is selfcontrolled by motor speed bymeans of a "notched disk" sensor.There is thus a correspondencebetween the excitation flux and thearmature flux, as for DC machines, andthe pull-out risk is zero.Since switching presents problems bothon starting and at low speed, the con-verter control system must be modified.This solution is ideal for synchronousmotors.
Cyclo converterEach motor phase is "supplied" by athree-phase double bridge.The first bridge is used to draw offcurrent throughout the positive cycle oneach of the network phases accordingto the required frequency.
The second bridge is used for reversecurrent during negative alternation toone of the phases.The cyclo converter produces a three-phase pseudo mains requiring filteringand with a frequency varying between0 % and a third of network frequency.
fig. 25: subsynchronous cascade power diagram.
M
P
Pr
3L
3L
3L

Cahier Technique Merlin Gerin n° 165 / p.18
"Motor protection" groups all theprotection devices used to preventserious damage due to abnormaloperating conditions at supply, motor orprocess level.
The protection devices to be installedare chosen according to the followingcriteria:c operating conditions;c importance of the operationperformed by the motor;c the degree of dependability required;c the relative cost of the protectiondevice with respect to the motor;c the likelihood of the faults consideredoccurring.
As well as:c the type of load driven;c disturbances which could occur onthe network;c the type of motor protected.
The faults listed below may thereforerequire use of a protection device.
main fault typesAsynchronous motorsc overloads;c short-circuits;c phase breaking, reversal andunbalance;c insulation fault between turns;c stator frame;c under and overvoltage;c incomplete starting.
Synchronous motorsAll the above faults, plus:c loss of synchronism;c loss of excitation;c rotor frame;c prolonged operation in asynchronousmode on starting;c overloads and short-circuits in theexciting winding;c reverse power (operation onAC generator).
Other faults linked to the process orloadc over frequent starts;c locked rotor;c underpower or undercurrent.
The detection/protection processes forthe main fault types are studied in theparagraph below.
protection principlesOverloadsOverloads can be detected by reversetime overcurrent relays, thermal imagerelays or heat sensors.
The relays process the information"current absorbed by the motor" whichis generally detected by currenttransformers.
The heat sensors are inserted in thelive parts of the motor.
c reverse time overcurrent relaysTheir use requires:v either an operating curve I(t) allowingstarting, or a device blocking the relayduring starting,v an operating threshold I0 close to therated current In of the motor
I0 ≈ 1.10 In .
These relays do not memorise theoverloads.
c thermal image relaysThese relays are certainly the mostsuitable since they ensure the greatestpossible advantage is derived frommotor overload possibilities withoutdamage.
The operating curve I(t) of the relaymust enable the starting current to flowwithout tripping and be approved by themotor manufacturer.
c heat sensorsThese are resistors, the ohmic value ofwhich varies with temperature.
In theory these devices are not used bythemselves, but rather back up therelays using the current absorbed as ameasuring means.
Overloads due to temperature rise of abearing are, in theory, insufficient fordetection by the overload relays.
Bearings must therefore be protectedby thermostats or heat sensors.
Short-circuitsShort-circuits on circuit-breakerequipment are detected byinstantaneous operation overcurrentrelays, set above the starting current.
On fuse-contactors, short-circuits arecleared by the fuses.
However, an useful solution is to addslightly time delayed overcurrent relaysto the fuses. This means that thecontactor can be used right up to itsbreaking capacity.
Phase breaking, reversal andunbalanceThese faults are detected by a filterwhich highlights the negative phasesequence components.
It is vital to monitor phase breaking andunbalance since these faults give riseto:c increased current, in the stator,;c additional temperature rise by Jouleeffect, due to the fact that all out-of-balance states result in the appearanceof reverse currents flowing through therotor at twice supply frequency in therotor.
Phase reversal is detected either bycurrents or voltages:c by currents: this reversal is detectedafter contactor closing: the drivenmachine receives the fault;c by voltages: this means contactorclosing can be prohibited, if necessary,if phase order is not the normal networkone.
Insulation fault in windingStator windings may have faultsbetween turns on the same phase orbetween windings of different phases.
As a result of its electrical position, thefault may not be detected quicklyenough by the overload protectiondevice, thus causing serious damage.These faults are normally detected bycurrent comparison.
c longitudinal earth leakage protectionProvides protection against faultsbetween windings of different phases.For this, the ends of the motor windingsmust be accessible on the neutral side.
4. protection of HV motors

Cahier Technique Merlin Gerin n° 165 / p.19
Faults are shown up by comparing theinput and output currents of the samephase (see fig. 26).If there are no faults, these currents areidentical and the protection relay is nottripped. It trips when the differencebetween these currents reaches avalue set by the relay setting.
c transverse earth leakage protectionProvides protection against faultsbetween turns of the same phase.It applies to machines with dividedphases, i.e. with two windings perphase.The operating principle is the same asabove, that is the currents of eachwinding are compared (see fig. 27).
Stator frameThis protection device is vital to complywith the statement of the 14.11.1988 onworkers' protection. It is chosenaccording to the earthing system of thenetwork supplying the motor.
c motor protection supplied by networkwith earthed or impedance-earthedneutral.The fault is detected by measuring thezero sequence current formed betweenthe faulty phase and the network frame.Low threshold overcurrent relays areused for measuring.The zero sequence current is deliveredby three parallel-connected currenttransformers or, better still, by a toroid(see fig. 28).Use of a toroid prevents theappearance of a false zero sequencecomponent due to unequal saturation ofcurrent transformers on motor starting,and allows a relatively low operatingthreshold.
These relays must operate for a faultcurrent value such that frame potentialcompared with earth is never raised tomore than 24 V in conductiveenvironments, with framesinterconnected, or 50 V in otherinstallation cases.
Knowledge of earth connection valueand of the frame interconnectionconfiguration is therefore necessary todetermine this setting point.If the frames are not interconnected,the value of the operating threshold isgiven by:
IF i
24 or 50 VRTM
.fig. 28: diagram showing a stator frame zero sequence protection with toroid sensor or CT +earthed or impedance-earthed neutral.
NM
protectionrelay
fig. 26: diagram showing a longitudinal earth leakage protection.
M N
protectionrelay
zerosequencecurrent relay
toroid
CT
zerosequencecurrent relay
eventually toroid
fig. 27: diagram showing a transverse earth leakage protection.

Cahier Technique Merlin Gerin n° 165 / p.20
RTM is the value of the earth resistanceof the frame in question.Note that the lower the threshold, theearlier the detection, and the smallerthe risk of damage to the magneticcircuits.
c unearthed neutralThe fault is detected by continuousmeasurement of global networkinsulation compared to earth by meansof DC injection devices such ascontinuous insulation monitors (seediagram 1 in figure 29) or by zerosequence overvoltage relays where thisovervoltage is delivered by threevoltage transformers with thesecondary winding in open delta (seediagram 2 in figure 29).
Under and overvoltage(see fig. 30)c undervoltageThis relatively common protectionprevents the motor from working onoverload and waiting for tripping by theoverload protection device. Moreover, ifthe contactor coil is supplied by anauxiliary LV source not from thenetwork, the latch undervoltageprotection device is vital to preventuntimely startup on restoration ofpower.
The "voltage" information is provided bya voltage transformer and processed bya time-delayable threshold device.
c overvoltageThis protection is necessary if there is arisk of strong fluctuations occurring onthe supply network. It means it is nolonger necessary to wait for theoverload relays to trip, sinceovervoltage results in motor overcurrentand increased motor torque whichcould be detrimental for the machinebeing driven.
The fault is detected by time delayedovervoltage measuring relays.
Incomplete or overlong startingThis protection is justified for starting inseveral stages.
It is provided by a time delay relay putinto operation at the beginning ofstarting and removed at the end. Thevalue monitored may be speed orcurrent.
Prolonged use of the starting system,calculated to run for a set time, is thusavoided.
Loss of synchronismThis protection is vital for synchronousmotors.In point of fact, the dampening cageof a synchronous motor is relativelyfragile. If the motor jams, inducedcurrents will flow through this cage andcould destroy it if the motor is notdisconnected.Jamming may occur following amechanical overload, undervoltage, aloss of or drop in excitation.
This fault is detected by underimpedance or power factor relayssupplied by voltage transformersand current transformers (see fig. 31).
fig. 29: insulation fault monitoring diagram with continuous insulation monitor or zero sequencevoltage relay - unearthed neutral
fig. 30: diagram showing under andovervoltage protection. In most cases, twoVTs supply the relay phase-to-phasevoltages.
voltagerelay
M
zero sequencevoltage relay
DC injectioninsulationmonitor
surgevoltagelimiter
C
R = load resistance
R R R
diagram 1
diagram 2

Cahier Technique Merlin Gerin n° 165 / p.21
directional powerrelay
M
underimpedanceor cos ϕ relay
M
Loss of excitationThis loss due, for example, to a break inrotor winding, causes the motor to jam.It can be detected by:c the "loss of synchronism" protectiondescribed above;c or an exciting undercurrent orundervoltage relay.
Rotor frame of a synchronous motorThis protection is determined accordingto the supply configuration and theDC production mode.
If the entire DC exciting circuit isunearthed, an insulation fault will notaffect motor operation.However, should a second fault occur,it may give rise to an overload or short-circuit with all its consequences. Therelays used to detect this type of faultare generally devices injecting lowfrequency 10 Hz or 20 Hz AC current(see fig. 32).
The 50 Hz frequency is also used,which requires that no 50 Hzcomponents must be present in theexciting circuit.
Prolonged operation in theasynchronous mode on startingOverlong starting on synchronousmotors causes excessive temperaturerise of the damping cage.
Either the "incomplete starting"protection described above is used or athermal device adapted to the rotorthermal time constant, placed in serieswith the inductance during starting (seefig. 32 element b).
Overload and short-circuit in theexciting windingThese protection devices preventdamage due to temperature rise of theexciting winding and its power supply.The fault is detected by an excitingovercurrent relay. Moreover an excitingundervoltage relay is normally used,tripping on voltage drop, caused forexample by a short-circuit.
On starting, it is used as an excitingvoltage presence relay and authorisesclosing of the exciting contactor atthe end of starting in theasynchronous mode (see fig. 32element g).
Reverse powerThis protection particularly applies tosynchronous motors.
When the supply circuit-breaker trips, itprevents energy from being sent backto the loads connected on the samebusbar. It also prevents a fault on thisbusbar from being supplied by themotor.
The protection device has to detect areversal in current or power direction.Its function is therefore performed by adirectional power relay (see fig. 33).
Frequent startsToo many starts over a given period oftime may cause motor damage if themotor is not designed for such anoperation.
This protection is provided by a relayperforming metering and time delayfunctions, which automatically limits:c either the number of starts over agiven period of time;c or the time interval between start upsover a given period of time.
fig. 31: protection against loss ofsynchronism.
fig. 32: rotor protection devices on startupand in operation.
a. exciting windingb. thermal protection: prolonged operation inasynchronous modec. starting resistanced. exciting contactore. rotor frame protectionf. overcurrent protectiong. undervoltage protectionh. to tripping of motor feeder contactors. continuous source
fig. 33: protection against reverse power.
ab
c
d
e
f
g
h
s
�@�À�@�À�@�À�@�À�@�À�@�ÀZ <
I >
U <
I >

Cahier Technique Merlin Gerin n° 165 / p.22
Locked rotorJamming of a motor for mechanicalreasons causes an overcurrent roughlyequivalent to starting current. Theresulting temperature rise isconsiderably greater since rotor lossesare maintained at their highest valuethroughout jamming and ventilation isno longer present if connected to rotorrotation. As a result, when there is arisk of jamming, the "locked rotor"protection is necessary since overloadrelays sometimes have an excessivelylong response time.This fault is detected by an overcurrentrelay set at a value less than thestarting current. This value is validated
after a time delay initiated when themotor is energised. This time delay isset at a value greater than or equal tonormal starting time.
Undercurrent or underpowerPumps may be damaged whenunpriming occurs. Unpriming could alsoresult in a drop in the active powerabsorbed by the motor. Protectionagainst this fault is provided by anundercurrent relay.
technological evolutionThe term "relay" is often used in theabove description of the various
protection devices. This is a thetraditionally used term (relay = a type ofprotection device) which goes back tothe time when motor protectionrequired the use of separate "relays"each with a single protection function.
In the seventies, manufacturers broughtout RACKS able to house a number ofdifferent protection devices in order tomeet needs more closely.
In the eighties digital technologyincreased adaptation possibilities stillfurther. Thus a single programmabledevice performs the various protectionand control/monitoring functionsrequired in each specific case.

Cahier Technique Merlin Gerin n° 165 / p.23
overall approachThe approach chosen by the designeris to look for the best technico-economic choice. For this, first try andvalidate the easiest and mosteconomical solution. Then, if this doesnot work, follow the order shown in thetable in figure 34.
Direct startingMotor apparent power at the beginningof starting:
Sm = Pn
η cosϕ
Id
In
Sm = 1,5000.84
5 = 8,925 kVA
where, with power factor on starting:cos ϕd = 0.15, i.e. : ϕd = 81°.This power is vectorially added to thepower delivered by the transformer onthe other feeders (see fig. 35).
The total value of the apparent powerrequired by the transformer isgraphically deduced from the following:
S ≈ 9,580 kVA.
The maximum inrush authorised is6,000 kVA: direct starting is thus notpossible.
Starting by reactanceIntroduction of a reactance reduces theapparent power absorbed by the motor.The available starting power isgraphically determined (see fig. 35).When the motor starts, the presence ofthe reactance means that the powerfactor approaches zero. Thus ϕd ≈ 90°.
appendix 1: determining motor starting mode
The purpose of the example below isnot to fully deal with a problem butrather to illustrate, through an example,an approach wich helps to choose theappropriate starting mode for a givenapplication.
calculation hypothesesAsynchronous motor with:c rated power Pn= 1,500 kW;c rated voltage Un = 5,500 V;c efficiency x power factor:η x cos ϕ = 0.84;c starting torque/rated torque ratio onfull voltage:
Cd
Cn = 0.8
c starting current/rated current ratio onfull voltage:
Id
In = 5 ;
c breakaway torque of the drivenmachine: 0.2 Cn;c main supply transformer power:Pt = 3 MVA;c maximum apparent power inrushauthorised by the transformer network:St = 6 MVA.
Other data necessary for calculation:c torque-speed C (N) characteristic ofthe motor;c load torque-speed Cr (N);characteristic of the driven machinec transformer delivery on feeders otherthan the motor one: 1,200 kVA undercos ϕ' = 0.87.
OA→
= 1,200 kVA : transformer powerused on other feeders.
OB→
= St = 6,000 kVA : maximumapparent power authorised. Theapparent power available for starting(motor + reactance) is graphicallydeduced.
AB→
= Sd = 5,300 kVA .Power reduction to be caused by thereactance:
Sd
Sm =
5,3008,925
≈ 0.6 .
fig. 34: decisive criteria for choosing motor starting mode.
starting solutions main acceptance criteriadirect power inrush compatible with networkreactance c starting torque greater than breakaway
torquec current peak (for full voltageresumption) acceptable by network
autotransformer the same
fig. 35: starting power diagram.
S = 9,580*
B
ϕd = 81°
ϕ' = 29.5°
1,200*
St = 6,000*
Sd = 5,300*
Sm = 8,925*
A
active power*: in kVA

Cahier Technique Merlin Gerin n° 165 / p.24
(a)
(c)
(d)
(b)
(e)
0 0.1 0.2 0.5 0.8 1
0.2
0.8
51
1
Cn
In
point of balanceat reducedvoltage
current peakon moveto full voltage
(N/Ns)
I 'd is the new starting current value.
Sd = Un I'd 3
Sm = Un Id 3
thus: I 'd = 0.6 Id.
Moroever: I' dId
= Ud
Un = 0.6 .
The value of voltage at the motorterminals is Ud = 0.6 Un. Once theelectrical problem has been solved, itremains to be seen if this solution isvalid from the mechanical standpoint. Inthe case of direct starting, the startingtorque equals : Cd = 8 Cn (see fig. 36).
In the case of starting by reactance, thestarting torque C'd equals:
C'd = 0.8 Cn Ud
Un
2
= 0.288 Cn
This value is compatible with thebreakaway torque of the machine beingdriven.
One last point remains to be checked:if the point of mechanical balanceCm = Cr is placed at an excessively lowspeed, a current peak may occur on themove to full voltage. If this peak is toohigh for the network, the starting modewill have to be reconsidered andstarting by autotransformer, forexample, chosen (see fig. 36).
Remark 1Let us assume that the value of thebreakaway torque of the drivenmachine is 0.35 Cn instead of 0.2 Cn.Starting by reactance is thenincompatible with the breakawaytorque.The solution of starting byautotransformer must then beenvisaged.The apparent power available remainsSd = 5,300 kVA. From this value themagnetising force of the auto-transformer Smg must be deducedwhich, at the initial starting moment, isarithmetically added to motor apparentpower. Smg is around 0.2 to 0.4 timesmotor apparent rated power.
i.e. with the factor 0.4:
Smg = 0.4 Pn
η cos ϕ
Smg = 0.4 1,5000.84
= 720 kVA .
The power reduction factor is then:
Sd − Smg
Sm =
5,300 − 7208,925
= 0.513
At constant voltage Un, the currentinrush on the network side is therefore:0.513 Id.
Determining the reduced startingvoltage Ud.
Equality of primary and secondaryautotransformer powers results in thefollowing:0.513 Id Un = I"d UdI"d is the reduced voltage startingcurrent on the motor side
0.513 Id Un = Id Ud
Un Ud
hence:Ud
Un
2
= 0.513
i.e. Ud = 0.718 Un
New starting torque:
0.8 Cn Ud
Un
2
= 0.41 Cn .
This value is sufficient for starting totake place.
Remark 2For a breakaway torque greater than0.41 Cn, stator starting with this motoris no longer possible.Either a slipring rotor motor with rotorstarting must be used, or a motor with aspecial cage possessing a high startingtorque.
fig. 36: torque and current curves for starting by reactance.
a: curve C (N) on full voltageb: curve C (N) on reduced voltage (0.6 Un)c: curve I (N) on full voltaged: curve I (N) on reduced voltage (0.6 Un)e: curve Cr (N)
CCn
IIn

Cahier Technique Merlin Gerin n° 165 / p.25
appendix 2: coordination of protection devices
Once the protection devices have beenchosen according to operatingrequirements, they must be coordinatedto obtain the maximum advantage fromtheir possibilities. A balance must besought between untimely tripping anddelay on fault removal. The problem ofprotection device coordination is solvedby studying the curves t (I) of therelays, of the circuit-breaker and of thebreaking capacity of the contactor. Thecharacteristics of the motor shown inthe figure are as follows:
c Pn = 550 kW;c Un = 3150 V;c In = 130 A;c Id = 5 In.
The contactor is of the Rollarc fuse type.
Type of protection devicesc thermal relay with indirect tripping,set at In = 130 A for overloads;c positive phase sequence componentrelay set at 6 In, time delayed at 0.05 sfor balanced faults;c negative phase sequence componentrelay set at 0.3 or 0.4 In, time delayedat 0.6 s.
In the case of networks with quasi-permanent unbalances, a two-thresholdrelay is used:c a lower time delayed threshold, setjust above the permanently acceptednegative phase sequence componentratios;c an upper instantaneous threshold forphase break protection.
Instantaneous tripping by the positivephase sequence component relayenables best use to be made of thecontactor’s breaking capacity andavoids fuse melting. Analysis of thecurves in figure 37 shows that themotor and network are protectedagainst:c unbalances of approximately 0.3 Into 10 In,c balanced faults from 6 In to 28 In.
The fuses only take action beyond 15 Infor unbalanced faults and 25 In forbalanced faults.
The maximum current the contactormay have to break is 28 In = 3,640 A.This value is considerably lower than itsbreaking capacity of 10 kA.
fig. 37: minutes thermal relay operating zone.
1 2 5 10 20 50 100
130 260 650 1,300 2,600 6,500
0.01
0.03
0.05
0.1
1
5
10
20
40
1
2
34
6810
20
3040
60
cold
hot
fuse
phase sequencecomponent:negativepositive
contactorbreakingtime
minutes
seconds
Rollarc contactorbreaking capacity
thermal relayoperating zone
3,640 A
k InIn (A)

Cahier Technique Merlin Gerin n° 165 / p.26
appendix 3: bibliography
Standardsc IEC 34-1: Rotating electricalmachines.
c IEC 71: Insulation coordination.
Merlin Gerin's Cahier Techniquec The breaking process with a FluarcSF6 puffer-type circuit-breaker,Cahier Technique n° 112 -J. HENNEBERT
c Behaviour of the SF6 MV circuit-breakers Fluarc for switching motorstarting currents,Cahier Technique n° 143 -J. HENNEBERT and D. GIBBS
c Overvoltages and insulationcoordination in MV and HV,Cahier Technique n° 151 -D. FULCHIRON

Cahier Technique Merlin Gerin n° 165 / p.27

Cahier Technique Merlin Gerin n° 165 / p.28Réal. : Illustration Technique - LyonDTE 05/95 - 2500 - Printing : Clerc - 38600 Fontaine