common and dedicated pilot-based channel · pdf filecommon and dedicated pilot-based channel...
TRANSCRIPT
Eurecom Seminar Series, 01.12.2005
COMMON AND DEDICATED PILOT-BASED CHANNEL ESTIMATES COMBINING AND KALMAN
FILTERING FOR WCDMA TERMINALS
Ahmet BAŞTUĞ1,2 , Giuseppe MONTALBANO1 , Dirk T.M SLOCK2
Philips Semiconductors1 and Institute Eurecom2
Sophia Antipolis / FRANCE

Transmit Beamforming of Dedicated Channels
Absence of TX beamforming:– The DPCH and CPICH channels are the same (up to a real factor due to TX
power offset) ⇒ CPICH is generally used for DPCH channel estimation
Presence of TX beamforming:– The DPCH channel is in general different from the CPICH channel ⇒
CPICH is generally believed not to be useful for DPCH channel estimation
UE 1Dedicated channel DPCH 1
Dedicated channel DPCH 2
UE 2Node B
Common pilot channel CPICH

CPICH & DPCH Slot Structure
Slot 0 Slot 1 Slot 2 Slot13 Slot14Slot n
DPCCH
Common pilots
2560 chips
CPICH
Data 1 TFCI Data 2 Ded. pilotsTPC
DPCCH
DPCH
• CPICH based channel estimation– Continuous provision of training chips yields high estimation accuracy and simple channel variations tracking
– Cannot be used alone in the presence of dedicated TX beamforming
• DPCCH based channel estimation
– Can cope with dedicated TX beamforming
– Short pilots sequences may yield to poor estimation accuracy
– Channel variations tracking over data requires interpolation and/or prediction ⇒ increased complexity
In reality the two propagation channels carrying CPICH and DPCH are shown (by proprietary field tests) to be correlated to a certain extent => an opportunity to exploit both training sources for user dedicated channel estimation which is especially beneficial in Tx beamforming

)(
)(
)())((),(1
,
p
P
p
pd
jjjp
Hd
tc
ttthp
ppττψξϕθτ −+=∑ ∑
=4444 34444 21
aw
array response vector
beamforming vectornominal p-th angle
pulse shapenominal p-th delay
angle spread around p-th anglepath coefficient
∑=
−=P
pppcc tcth
1, )()(),( ττψτ
effective p-th path time-varying dedicated coefficient
Channel Models
CPICH Channel Model
p-th path time-varying common coefficient
Beamformed DPCH Channel Model
• DPCH and CPICH channels share a common structure (Doppler spread, path delays,…), i.e. they are correlated

)()()()()()( nnnnnn ccdd VhShSY ++=
First Step: Least Squares Channel Estimations(Slotwise Brute FIR Channel Estimates)
RX signal vector in slot n
Dedicated pilots Hankel Matrix
Dedicated channel
Common pilotsHankel Matrix
Common channel
Interference+Noise
2
2
)()()(min arg)(ˆ
)()()(min arg)(ˆ
nnnn
nnnn
ccc
ddd
c
d
hSYh
hSYh
h
h
−=
−=
TNckccc
TNdkddd
nhnhnhn
nhnhnhn
)]()...()...([)(
)]()...()...([)(
1,,0,
1,,0,
−
−
=
=
h
h FIR Channel Model• n: slot index• k: channel tap index• N: maximum ch. tap index
Slotwise RxSignal Model
Slotwise LS DPCH and CPICHChannel Estimation

Combining (Filtering) Strategies in the Following Steps
• From this moment on we treat each channel tap independently
–Sparsification or passing to pathwise model is a possibility at this phase
• At first instant we consider combining in MMSE sense the LS estimates obtained in the first step to decrease the error variances of DPCH channel taps
• Another degree of freedom comes from the temporal channel dynamics. By fitting DPCH channel tap variations to Autoregressive (AR) models of sufficient order, one can apply Kalman filtering (KF) over slotwise dedicated channel estimates
–First order AR process is sufficient when one wants to match the channel BW with the Doppler spread
• More proper approach is of course to exploit both degrees of freedom jointly.

Unbiased LMMSE combining of LS DPCH & CPICH channel estimations
Tkckdkkd nhnhnh )](ˆ)(ˆ[)(ˆ̂
,,, f=2
,1]1[
)](ˆ)(ˆ[)(Emin arg Tcdkkdk nhnhnh
Tkk
fff
−==α
1,...,0for )()()( ,
)(
)(
,,
,
,
−=+= Nknxnhnh kc
nh
nh
kdkkc
kd
kc
32143421
error est. MMSE
of basis the on
of est. LMMSE
α
• LS estimated DPCH channel taps have equal error variance (similar case for CPICH channel taps) Hence one can estimate these two error variances by slightly overestimating the DPCH and CPICH channel lengths and taking the power at the tails of the channel estimates as the error variances
• and can be obtained by covariance matching technique (or by EM algorithm in the KF context)
kα 2,kcx
σ

Kalman Filtering Model
−−= 22
22
1
01 1 α
σσ
αc
d
h
hρB : Input Gain
)()(
)(
=
nhnh
nc
dh : State Vector
∆∆
=)()(
)(nhnh
nc
du : Input Vector
=
=
∆
∆2
2
2
2
00
00
c
d
c
d
h
h
h
huu σ
σσ
σR : Input Covariance
QBBR Huu = : Process Noise Covariance
== 2
2
00
c
d
e
e
σσ
VRww :Measurement Noise Covariance
# of KF states can be decreased from 2 to 1 when …1≈α
( ) ( ) ( )nnn Buhh +=+ ρ1 : State Transition Process

Three Different Approaches for Kalman Filtering
• First doing LMMSE combining and then Kalman filtering–suboptimal but the simplest–one state in the Kalman filter
• Jointly Kalman filtering the two–the optimal approach in the MMSE sense–two states in the Kalman filter
• First applying Kalman filtering separately to DPCH and CPICH channel taps and then MMSE combining of the results
–suboptimal due to colored noise after KF–will perform better than the first approach if DPCH and
CPICH are not very much correlated–has two Kalman states and hence has the same
complexity as joint Kalman => not preferable• All methods are feasible for implementation
–complexity is proportional to the number of channel taps


Estimation of Kalman Filter Model Parameters• For KF, are necessary
• Estimation of (LS error variances): Available after LS step via slightly overestimating the DPCH and CPICH channel lengths and taking the power at the tails of the channel estimates as the error variances
• Estimation of : via EM algorithm within the framework offixed-lag Kalman smoothing (with only one step delay)
{ }wwRQ,,ρ
{ }Q,ρ
wwR
E-step(KalmanSmoothing)
M-step(Adaptation of model parameters)
{ }Q,ρ
This algorithm is common, originally proposed by [Shumway 1982, phdthesis Musicus 1982] and iterates between two EM steps once every slot

Simulation Settings
• DPCH power = 5% BS power–effectively 20% when beamforming gain is considered
as 4• DPCCH occupies 20% of slot, DPCH Spreading Factor =
128• CPICH power=10% BS power• Intracell interference generatedcomplying with 3GPP tests• Pulse shape: rrc 0.22• Oversampling factor =2 • Channels modeled as AR(1) processes
–power delay profile: ITU Vehicular A• Performances are compared after KF converges, i.e. @ steady state

DPCH Channel Estimates Normalized MSE Results
• temporal corr.= 0.99, • CPICH-DPCH corr= 0.95
-15 -10 -5 0 5 10 15-18
-16
-14
-12
-10
-8
-6
-4
-2
0
2
DPCCH Ec/N
0(dB)
NM
SE
(dB
)
Dedicated LSKalman Filtering of Dedicated LSKalman Smoothing of Dedicated LSULMMSE Combining of Dedicated LSKalman Filtering After ULMMSEKalman Smoothing After ULMMSEULMMSE After Kalman FilteringULMMSE After Kalman SmoothingOptimal Kalman FilteringOptimal Kalman Smoothing

DPCH Channel Estimates Normalized MSE Results
• temporal corr.= 0.9, • CPICH-DPCH corr= 0.9
-15 -10 -5 0 5 10 15-15
-10
-5
0
DPCCH Ec/N
0(dB)
NM
SE
(dB
)
Dedicated LSKalman Filtering of Dedicated LSKalman Smoothing of Dedicated LSULMMSE Combining of Dedicated LSKalman Filtering After ULMMSEKalman Smoothing After ULMMSEULMMSE After Kalman FilteringULMMSE After Kalman SmoothingOptimal Kalman FilteringOptimal Kalman Smoothing

DPCH Channel Estimates Normalized MSE Results
• temporal corr.= 0.99, • CPICH-DPCH corr= 0.8
-15 -10 -5 0 5 10 15-16
-14
-12
-10
-8
-6
-4
-2
0
2
DPCCH Ec/N
0(dB)
NM
SE
(dB
)
Dedicated LSKalman Filtering of Dedicated LSKalman Smoothing of Dedicated LSULMMSE Combining of Dedicated LSKalman Filtering After ULMMSEKalman Smoothing After ULMMSEULMMSE After Kalman FilteringULMMSE After Kalman SmoothingOptimal Kalman FilteringOptimal Kalman Smoothing

DPCH Channel Estimates Normalized MSE Results
• temporal corr.= 0.9, • CPICH-DPCH corr= 0.6
-15 -10 -5 0 5 10 15-15
-10
-5
0
DPCCH Ec/N
0(dB)
NM
SE
(dB
)
Dedicated LSKalman Filtering of Dedicated LSKalman Smoothing of Dedicated LSULMMSE Combining of Dedicated LSKalman Filtering After ULMMSEKalman Smoothing After ULMMSEULMMSE After Kalman FilteringULMMSE After Kalman SmoothingOptimal Kalman FilteringOptimal Kalman Smoothing

Conclusions and Possible Extensions• LMMSE combining of Least Squares channel estimates brings
moderate improvement at reasonably high cross correlations• Kalman filtering over DPCH LS estimates is much better• Joint Kalman filtering is the best (optimal in MMSE sense) but at the
same time the most complex• Kalman filtering after LMMSE combining is equivalent to joint Kalman
filtering when the channels associated with DPCH and CPICH are fully correlated
– Performance difference is non-negligible only when dopplerspread and DPCH-CPICH correlations are both low
– attractive also for the non-beamforming case especially for the cell edges => coverage increase
– smoothing (backward pass) improves the performance w.r.t filtering (only forward pass) in all the cases.
• Extensions:– straightforward extension for 3 or more pilot sequences (in case of
one or more S-CPICH assignments)– handling channel variation within the slot– taking into account also the correlations among FIR channel taps– Sparsification, hybrid treatment for different taps

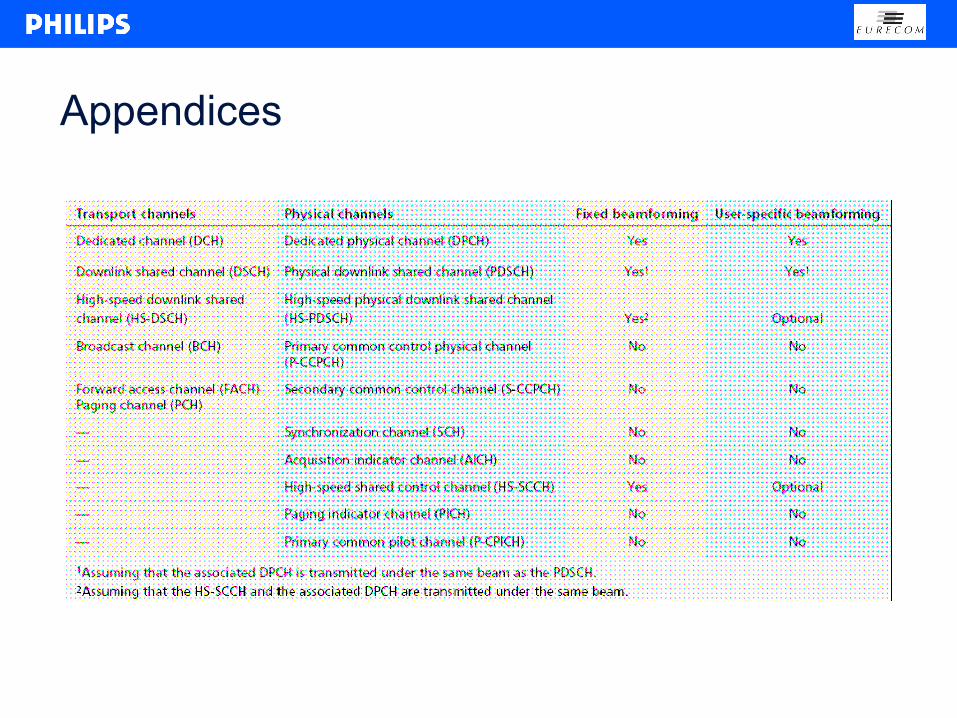
Appendices