clase modelos físicos-1
DESCRIPTION
ModeladoTRANSCRIPT

Modelado y Simulación
Modelos Físicos
Semestre 2015 -2
Profa. Dra. Ruth Canahuire
Especialidad de Ing. Electrónica
Contenido de la Clase
Sistemas y sus propiedades.
Sistema mecánico de traslación vertical.
Sistema mecánico rotacional.
Sistema eléctrico con interruptores.

Recordando: ¿Qué es un sistema?
Un objeto o conjunto de objetos interrelacionados y relacionados con el entorno que cumplen una función específica.
Sistema de control de procesos

Propiedades de los sistemas
Estabilidad
La característica más importante del comportamiento dinámico de un sistema es la estabilidad absoluta.
¿El sistema es estable o inestable?
Equilibrio: Un sistema está en equilibrio si, en ausencia de cualquier perturbación la salida permanece en el mismo estado.
Estable si la salida regresa a su estado de equilibrio cuando el sistema está sujeto a una condición inicial
El sistema es:
Inestable si la salida diverge sin límite a partir de su estado de equilibrio cuando el sistema está sujeto a una condición inicial.

Propiedades de los sistemas
Memoria
Un sistema posee memoria si la salida depende no sólo de la señal de entrada actual, sino de valores pasados y futuros.
Sistemas con memoria pueden ser Anticipativos
Un sistema es sin memoria, si la salida depende únicamente de los valores actuales de la entrada.
𝑦 𝑡 = 𝑥 𝑡 + 𝑠𝑒𝑛(𝑥 𝑡 + 30)
(Usan valores futuros)
𝑦 𝑡 = 𝑎𝑥 𝑡 + 𝑏𝑥 𝑡 − 1 + 𝑐𝑥(𝑡 + 2)

Propiedades de los sistemas
Si la señal de salida depende solo de los valores actuales y anteriores de entrada.
Causalidad
Estos sistemas son llamados de No Anticipativos, por que la salida no anticipa valores futuros de la entrada.
Si un sistema necesita valores futuros de la entrada para obtener la salida, el sistema es No Causal.
Entonces podemos afirmar:
Todos los sistemas sin memoria son causales.

Propiedades de los sistemas
Invertibilidad
Si la entrada puede recuperarse a partir de la salida del sistema
Invariancia en el tiempo
Un retraso (o adelanto) en el tiempo para la señal de entrada genera el mismo retraso (o adelanto) a la salida
Evalúe si 𝑦(𝑛) = 𝑟𝑛 𝑥(𝑛) es invariante en el tiempo

Linealidad
Propiedades de los sistemas
Es la propiedad de los sistemas que describe una relación lineal entre las entradas y las salidas.
Un sistema es lineal si cumple con las propiedades de aditividad y homogeneidad (escalamiento). A esto se le conoce como principio de superposición.
G
G
𝑥1(𝑡)
𝑥2(𝑡)
𝑦1(𝑡)
𝑦2(𝑡)
G 𝑥1 𝑡 + 𝑥2(𝑡) 𝑦1 𝑡 + 𝑦2(𝑡)
Aditividad
G 𝛼𝑥(𝑡) 𝛼𝑦(𝑡)
G 𝑥(𝑡) 𝑦(𝑡)
Homogeneidad

Sistemas Lineales Invariantes en el Tiempo (SLIT)
Estos sistemas cumplen con:
Linealidad
Invarianza en el tiempo
Son el sistema más simple de analizar
Resolución a través de ecuaciones diferenciales
𝑢 𝑡 = 𝑎 ∙ 𝑦 𝑡 + 𝑏 ∙𝑑𝑦
𝑑𝑡+ 𝑐 ∙
𝑑2𝑦
𝑑𝑡2+⋯+ 𝑧 ∙
𝑑𝑛𝑦
𝑑𝑡𝑛
El orden del sistema está determinado por el mayor grado de derivada que presenta el modelo.
Sistemas Físicos
En general: Sistema lineal invariante en el tiempo (SLIT)
3 Tipos de Elementos
De Almacenamiento de energía Cinética
De Almacenamiento de energía Potencial
Disipador de energía
Las Ecuaciones diferenciales describen el comportamiento dinámico de estos sistemas

Modelos Físicos
Sistemas Mecánicos de Traslación Vertical.
Sistemas Mecánicos de Rotación.
Sistemas Eléctricos con interruptores.
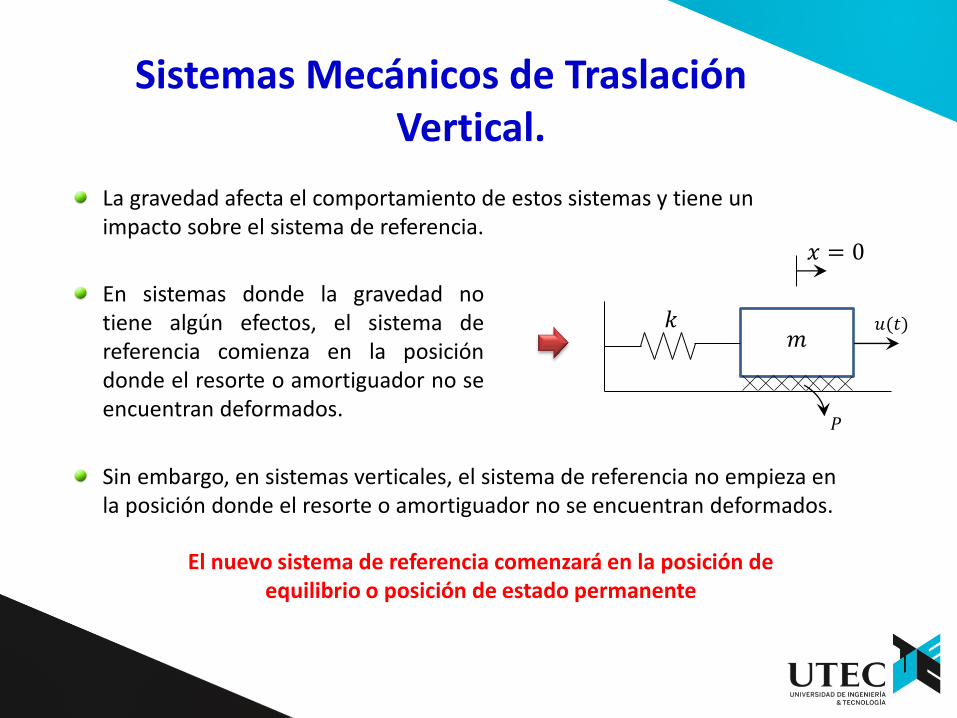
Sistemas Mecánicos de Traslación Vertical.
La gravedad afecta el comportamiento de estos sistemas y tiene un impacto sobre el sistema de referencia.
En sistemas donde la gravedad no tiene algún efectos, el sistema de referencia comienza en la posición donde el resorte o amortiguador no se encuentran deformados.
𝑚
𝑥 = 0
𝑢(𝑡) 𝑘
𝑃
Sin embargo, en sistemas verticales, el sistema de referencia no empieza en la posición donde el resorte o amortiguador no se encuentran deformados.
El nuevo sistema de referencia comenzará en la posición de equilibrio o posición de estado permanente

Sistemas de Traslación Vertical.
𝑘
𝑦 𝑦 = 0
𝑚
𝑘
𝑦
𝑦 = 𝑦0
𝑚
𝑘
𝑓(𝑡)
𝑥 𝑥 = 0
𝑦
𝑦 = 𝑦0
Resorte sin deformación
Sistema en equilibrio Nuevo sistema de
referencia
𝑦 = 𝑦0 + 𝑥
Del sistema en equilibrio: 𝑚𝑔 = 𝑘𝑦0
Del nuevo sistema de referencia: 𝐹 = 𝑚𝑎
𝑓 𝑡 + 𝑚𝑔 − 𝑘 𝑥 + 𝑦0 = 𝑚𝑦
𝑓 𝑡 +𝒎𝒈 − 𝑘𝑥 − 𝒌𝒚𝟎 = 𝑚𝑥 𝑚𝑥 + 𝑘𝑥 = 𝑓(𝑡)

Ejercicio 1:
Obtener la expresión del desplazamiento 𝑥 𝑡 , para 𝑡 > 0, del siguiente sistema mecánico, para una entrada escalón unitarios, 𝑢(𝑡) . Considere condiciones iniciales iguales a cero, donde 𝑚 = 5 kg, 𝑃1 = 10 N.s/m, 𝑃2 = 5 N.s/m, 𝑘 = 300 N/m.
𝑚
𝑘
𝑓(𝑡)
𝑥
𝑃1
𝑃2
Solución:
Diagrama de cuerpo libre (DCL):
𝑚
Asumiendo 𝒙 > 𝟎

Ejercicio 2:
Obtener las ecuaciones de movimiento del siguiente sistema mecánico.
𝑚1
𝑘1
𝒇(𝒕)
𝑥1
𝑃1
𝑃2
𝑃3
𝑘2
𝑚2 𝑥2
Solución:
Diagrama de cuerpo libre (DCL):
Asumiendo 𝒙𝟐> 𝒙𝟏 > 𝟎
𝑚1 𝑚2

Sistemas Mecánicos de Rotación.
Elemento Rotacional: Momento de Inercia
𝑇𝑜𝑟𝑞𝑢𝑒𝑠 = 𝐽 × 𝛼 = 𝐽𝜃 (𝑡)
𝛼: aceleración angular J: Momento de inercia
Amortiguador Viscoso
𝑇𝑃 𝑡 = 𝑃𝜃
𝐽
𝑻(𝒕)
𝜃(𝑡)
𝑃
𝐽
𝑻𝑷(𝒕)
𝜃(𝑡)
Torque del amortiguador torsional
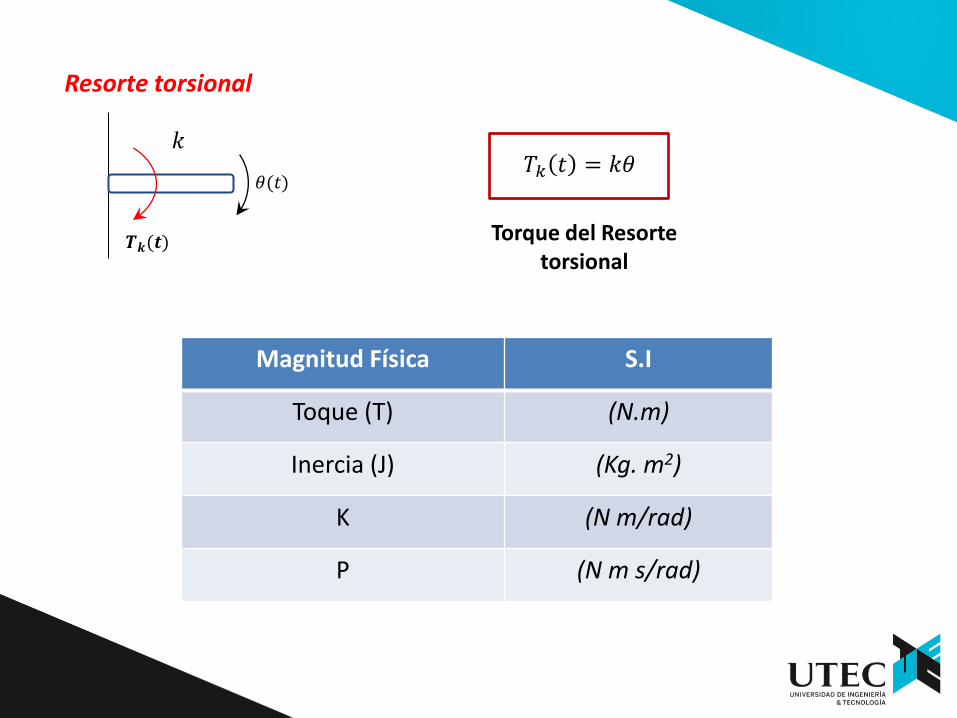
Resorte torsional
𝑻𝒌(𝒕)
𝑘
𝜃(𝑡) 𝑇𝑘 𝑡 = 𝑘𝜃
Torque del Resorte torsional
Magnitud Física S.I
Toque (T) (N.m)
Inercia (J) (Kg. m2)
K (N m/rad)
P (N m s/rad)

Ejercicio 3:
𝑃
𝐽
𝑻(𝒕)
𝜃(𝑡)
Obtener la expresión del ángulo de rotación 𝜃 𝑡 , para 𝑡 > 0, del siguiente sistema mecánico de rotación, donde el torque externo es 𝑇 𝑡 = 20𝑢(𝑡). Considere condiciones iniciales iguales a cero.
Considere: 𝐽 = 2 kg/m^2 𝑃 = 4 N.m.s/rad 𝑘 = 50 N.m/rad
Solución:
Diagrama de cuerpo libre (DCL):
Asumiendo 𝜽 > 𝟎
𝑱
𝑘

Ejercicio 4:
Obtener las ecuaciones de movimiento del siguiente sistema mecánico rotacional.
𝐽2 𝐽3
𝑃1
𝐽1
𝑻(𝒕)
𝜃1(𝑡)
𝑘1
𝑃2
𝑃3
𝜃2(𝑡) 𝜃3(𝑡)
𝑘2
Solución:
Diagrama de cuerpo libre (DCL): Asumiendo 𝜽𝟑 > 𝜽𝟐 > 𝜽𝟏 > 𝟎
𝑱𝟏 𝑱𝟐 𝑱𝟑

Ejercicio 5:
Determine la ecuación de movimiento del siguiente sistema mecánico. Considere que el cilindro solo rota sobre su eje (no hay traslación). El cilindro tiene un radio de R.
𝑱 𝒎
𝑘
𝑥
𝜃(𝑡)
𝑻(𝒕)
𝑃1 𝑃2
Solución:
Diagrama de cuerpo libre (DCL):
Asumiendo 𝒙 > 𝟎
𝑱 𝑚

SISTEMA ELÉCTRICO Uso de Interruptores
Ejercicio 6:
Sea el sistema eléctrico mostrado en la Figura. • El interruptor es movido de A a B en el instante t=0 s. Determine el voltaje
del capacitor en t=6 s. • En t=6 s., el interruptor es movido a la posición C. Determine el voltaje del
capacitor 4 segundos más tarde.
+
-
+
-
R1=50kΩ
𝑣𝑐 𝑣𝑠 𝑡 = 50𝑢 𝑡 𝑉 R2=10kΩ
A B
C
C=100µF

Ejercicio 7:
Considerar el circuito mostrado en la Figura. • El interruptor está inicialmente en el punto A. Luego el interruptor es movido
al punto B y el sistema alcanza el estado estacionario. Cuál es el valor final de la corriente en el estado estacionario a través de 𝑅1?. Considere 𝑣 𝑡 = 50 V.
• Cuando el sistema alcanza el estado estacionario, el interruptor es movido a la posición C en t = 0. Escribir el modelo dinámico en términos de la corriente y las condiciones iniciales que describen esta situación.

Bibliografía
Smith, Michael. 2011. A First Course in Differential Equations, Modeling and Simulation, 1st Ed. CRC Press.
Harold Klee, Randal Allen. 2011. Simulation of Dynamic Systems with Matlabr and Simulinkr. CRC Press.
Ljung, Lennart. 1994. Modeling of Dynamics Systems. Prentice Hall.