caractéristiques du produit - library.e.abb.com description 7 1.1 structure ... s4cplus et du...
TRANSCRIPT

Caractéristiques du produit
Robot articulé
IRB 1400IRB 1400 - CRIRB 1400 - HM2004, M2000


Caractéristiques du produit
Robot articulé3HAC 10765-1
Rév. EIRB 1400
IRB 1400 - CR
IRB 1400 - HM2004/M2000

Les informations contenues dans ce manuel peuvent être modifiées sans préavis et ne doivent pas être interprétées comme un engagement de la part d'ABB. La responsabilité d'ABB ne sera pas engagée par suite d'erreurs contenues dans ce manuel.
Sauf stipulation expresse du présent manuel, aucune des informations ne pourra être interprétée comme une garantie d'ABB couvrant les risques de perte, de dommages corporels ou matériels, l'adaptation à un usage particulier, ou toute autre garantie que ce soit.
En aucun cas, la responsabilité d'ABB ne pourra être engagée à la suite de dommages fortuits ou liés à l'utilisation du présent manuel ou des produits décrits dans le manuel.
Le présent manuel ne doit pas être reproduit ou copié intégralement ou en partie sans la permission écrite d'ABB, et son contenu ne doit être ni divulgué à des tiers ni utilisé à des fins non autorisées. Les contrevenants seront poursuivis.
D'autres exemplaires de ce manuel peuvent être obtenus auprès d'ABB au prix en vigueur.
© Copyright 2004 ABB. Tous droits réservés.
ABB RoboticsSE-721 68 Västerås
Suède

Table des matières
Vue d’ensemble 5
1 Description 7
1.1 Structure . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 71.1.1 Introduction . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 71.1.2 Les différentes versions du robot. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 8
1.2 Sécurité/Normes . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 121.2.1 Normes. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 121.2.2 Sécurité . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 13
1.3 Installation . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 151.3.1 Introduction . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 151.3.2 Conditions d'exploitation . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 151.3.3 Montage du manipulateur . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 161.3.4 Schéma des charges . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 171.3.5 Montage de l'équipement . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 18
1.4 Maintenance et dépannage. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 221.4.1 Introduction . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 22
1.5 Mouvements du robot . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 231.5.1 Introduction . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 231.5.2 Performances conformes à la norme ISO 9283 . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 281.5.3 Vitesse . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 281.5.4 Signaux . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 28
2 Spécification des variantes et des options 29
2.1 Introduction . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 292.1.1 Généralités . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 292.1.2 Manipulateur . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 292.1.3 Interface de l'application . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 30
3 Accessoires 35
3HAC 10765-1 Rev.E 3

Table des matières
4 Rev.E 3HAC 10765-1

Vue d’ensemble
Vue d’ensemble
À propos de ces caractéristiques du produitElles décrivent les performances du manipulateur ou d'une famille complète de manipulateurs en termes :
• d'impressions structurelles et dimensionnelles ;
• de respect des normes, de la sécurité et des exigences de fonctionnement ;
• de schémas des charges, de montage d'équipement supplémentaire, de mouvement et de position atteinte ;
• de caractéristiques de variante et d'options disponibles.
UtilisateursDestiné à :
• chefs et personnel produit ;
• personnel ventes et marketing ;
• personnel commandes et service clientèle.
ContenuConsultez la table des matières à la page 3.
Révisions
Caractéristiques du produit complémentaires
Révision Description
Révision E - Ajout du texte au chapitre Maintenance
Caractéristiques du produit
Description
Système de commande IRC5 avec FlexPendant, 3HAC022906-001
Logiciel du système de commande IRC5
RobotWare 5.07, 3HAC022049-001
Documentation utilisateur du robot
IRC5 et M2004, 3HAC024534-004
3HAC 10765-1 Rev.E 5

Vue d’ensemble
6 Rev.E 3HAC 10765-1

1 Description
1.1.1 Introduction
1 Description
1.1 Structure
1.1.1 Introduction
GénéralitésL'IRB 1400 est un robot industriel à 6 axes spécifiquement conçu pour les industries manufacturières nécessitant une souplesse élevée en matière d'automatisation. Il dispose d'une structure ouverte spécialement adaptée à une utilisation souple. Il peut communiquer longuement avec les systèmes externes.
Robot pour salle blancheLe robot pour salle blanche est homologué Salle blanche catégorie 100 selon la norme fédérale 209 en vigueur aux États-Unis ou Salle blanche catégorie 5 selon la norme ISO 14644-1.
Le robot est équipé du système de commande IRC5 et du logiciel de commande de robot RobotWare pour M2004 ; il est également doté du système de commande S4Cplus et du logiciel de commande de robot BaseWare pour M2000. RobotWare et BaseWare OS prennent en charge tous les aspects du système de robot, tels que le contrôle des mouvements, le développement et l'exécution de programmes d'application, la communication, etc. Reportez-vous aux caractéristiques d'IRC5 pour M2004 et à celles de S4Cplus pour M2000. Les normes de sécurité exigent qu'un système de commande soit relié au robot.
En ce qui concerne les fonctionnalités supplémentaires, le robot peut être équipé d'un logiciel optionnel de prise en charge d'applications (comme l'encollage et le soudage à l'arc), de fonctions de communication (communication réseau) et de fonctions avancées (fonctionnement multitâche, contrôle par capteur, etc.). Pour obtenir la description complète des logiciels optionnels, reportez-vous à Caractéristiques du produit - Options RobotWare.
3HAC 10765-1 Rev.E 7

1 Description
1.1.2 Les différentes versions du robot
Axes du manipulateur
Figure 1 Le manipulateur IRB 1400 comporte 6 axes.
1.1.2 Les différentes versions du robot
Le robot IRB 1400 est disponible dans trois versions différentes.
Poids
Autres données techniques
Axe 6
Axe 1
Axe 2
Axe 3
Axe 4 Axe 5
Version du robot Description
IRB 1400 pour un montage sur le sol
IRB 1400CR pour une installation en salle blanche
IRB 1400H pour un montage inversé
Robot Poids
Manipulateur 225 kg
Données Description Valeur
Niveau de bruit aérien Niveau de pression acoustique en dehors de l'espace de travail
<Niveau acoustique continu équivalent inférieur à 70 dB (A) (conformément à la directive Machine 89/392/CEE)
8 Rev.E 3HAC 10765-1

1 Description
1.1.2 Les différentes versions du robot
Consommation d'énergieTrajectoire E1-E2-E3-E4 dans le cube ISO, charge maximale.
Figure 2 Trajectoire E1-E2-E3-E4 dans le cube ISO, charge maximale.
Vitesse [mm/s] Consommation d'énergie [kW]
Max. 0,44
1000 0,39
500 0,36
100 0,34
E 1 E 2
P302
P
P40
10P
E 4 3E
400 mm
3HAC 10765-1 Rev.E 9

1 Description
1.1.2 Les différentes versions du robot
Dimensions de l’IRB 1400 et de l’IRB 1400CR
Figure 3 Vue latérale et vue du dessus du manipulateur - version « montage sur le sol » (dimensions en mm).
1 100
1 310
685
R=348
120
85720170
475
600
120
150398
667
170
Z
Y
X
X
10 Rev.E 3HAC 10765-1

1 Description
1.1.2 Les différentes versions du robot
Dimensions de l’IRB 1400H
Figure 4 Vue latérale et vue du dessus du manipulateur - version « montage inversé » (dimensions en mm).
690
R= 372
120
342
348
450 X
Y
X
398150
667
170 720 85
170 1 100
120
450
475
1 160
Z
3HAC 10765-1 Rev.E 11

1 Description
1.2.1 Normes
1.2 Sécurité/Normes
1.2.1 Normes
Le robot est conforme aux normes suivantes :
Le robot est entièrement conforme aux normes de santé et de sécurité stipulées dans les directives sur les machines de l'Union Européenne.
Normes Description
EN ISO 12100-1 Sécurité des machines, terminologie
EN ISO 12100-2 Sécurité des machines, caractéristiques techniques
EN 954-1 Sécurité des machines, pièces des systèmes de commande liées à la sécurité
EN 60204 Équipement électrique des machines industrielles
EN 61000-6-4 (option) Compatibilité électromagnétique, normes d'émission générique
EN 61000-6-2 Compatibilité électromagnétique, normes d'immunité générique
EN 775 Robots manipulateurs industriels, sécurité
Normes Description
CEI 60204-1 Équipement électrique des machines industrielles
CEI 60529 Degrés de protection fournis par les enveloppes
Normes Description
ISO 10218 Robots manipulateurs industriels, sécurité
ISO 9787 Robots manipulateurs industriels, systèmes de coordonnées et nomenclatures de mouvements
Normes Description
ANSI/RIA R15.06/1999 (option)
Consignes de sécurité relatives aux robots et systèmes de robot industriels
ANSI/UL 1740-1998 (option)
Consignes de sécurité relatives aux robots et aux équipements robotiques
CAN/CSA Z 434-03 (option)
Robots industriels et systèmes de robot - Consignes générales de sécurité
12 Rev.E 3HAC 10765-1

1 Description
1.2.2 Sécurité
1.2.2 Sécurité
Le robot est conçu pour une sécurité absolue. Il dispose de son propre système de sécurité, basé sur un circuit à deux voies surveillé en permanence. Si un problème se produit sur l'un des composants, l'alimentation électrique fournie aux moteurs est coupée et les freins s'enclenchent.
Catégorie de sécurité 3Le dysfonctionnement d'un composant, comme le collage d'un relais, est détecté lors de l'opération MOTEUR EN MARCHE/MOTEUR À L'ARRÊT suivante. L'opération MOTEUR EN MARCHE ne peut avoir lieu et la section défectueuse est signalée. Ceci est conforme à la catégorie 3 de la norme EN 954-1, Sécurité des machines, pièces des systèmes de commande liées à la sécurité – Première partie.
Sélection du mode de fonctionnementLe robot peut faire l’objet d’une utilisation manuelle ou automatique. En mode manuel, le robot ne peut être utilisé que par l'intermédiaire du pupitre mobile d'apprentissage et non par un équipement externe.
Vitesse réduiteEn mode manuel, la vitesse est limitée à 250 mm/s maximum.
Une limitation de vitesse s'applique non seulement au TCP (point d'outil), mais également à tous les composants du robot. Il est également possible de commander la vitesse de l'équipement monté sur le robot.
Gâchette de validation à trois positionsLa gâchette de validation du pupitre mobile d'apprentissage permet de déplacer le robot en mode manuel. La gâchette de validation comporte un interrupteur avec trois positions, ce qui signifie que les mouvements du robot cessent lorsque la gâchette de validation est complètement enfoncée ou relâchée. L'utilisation du robot est ainsi plus sûre.
Mouvement manuel en toute sécuritéLe robot est déplacé à l'aide d'un joystick ; l'opérateur n'a pas besoin de rechercher la bonne touche sur le pupitre mobile d'apprentissage.
Protection survitesseLa vitesse du robot est contrôlée par deux ordinateurs indépendants.
Arrêt d'urgenceLe système de commande et le pupitre mobile d'apprentissage comportent tous deux un bouton d'arrêt d'urgence. Des boutons d'arrêt d'urgence supplémentaires peuvent être connectés au circuit de chaîne de sécurité du robot.
3HAC 10765-1 Rev.E 13

1 Description
1.2.2 Sécurité
Arrêt de l'espace de sécuritéLe robot comporte un certain nombre d'entrées électriques qui peuvent être utilisées pour la connexion d'équipements de sécurité externes, comme des barrières de sécurité et des rideaux de lumière. Les fonctions de sécurité du robot peuvent ainsi être activées par les équipements périphériques et par le robot lui-même.
Arrêt retardé de l'espace de sécuritéUn arrêt retardé est progressif. Le robot s'arrête de la même manière que pour un arrêt normal du programme, sans dévier de la trajectoire programmée. Après environ 1 seconde, l'alimentation des moteurs est coupée.
Limitation de l’espace de travailLe mouvement de chaque axe peut être restreint à l'aide de limites logicielles.
Les axes 1, 2 et 3 peuvent eux-aussi être limités au moyen de butées mécaniques réglables (facultatif).
Commande Hold-to-run (nécessitant une action maintenue)Hold-to-run (nécessitant une action maintenue) signifie que vous devez appuyer sur le bouton de démarrage pour déplacer le robot. Lorsque vous relâchez le bouton, le robot s'arrête. La fonction Hold-to-run (nécessitant une action maintenue) sécurise le test des programmes.
Sécurité incendieLe manipulateur et le système de commande répondent aux exigences strictes d'Underwriters Laboratories en matière de sécurité incendie.
Lampe de sécurité (option)Le robot peut être équipé d'une lampe de sécurité montée sur le manipulateur. Cette lampe est activée lorsque les moteurs présentent l'état MOTEURS EN MARCHE.
14 Rev.E 3HAC 10765-1

1 Description
1.3.1 Introduction
1.3 Installation
1.3.1 Introduction
GénéralitésIl existe deux versions de l’IRB 1400 : l’une pour le montage sur le sol, l’autre pour le montage inversé. Un terminal (poids maximal = 5 kg, charge utile comprise) peut être monté sur la bride de montage du robot (axe 6). Il est possible de monter d'autres équipements (poids maximal = 18 kg) sur le bras supérieur.
1.3.2 Conditions d’exploitation
Normes de protectionCEI 529
Normes Salle blancheManipulateur Salle blanche : catégorie 100 selon la norme fédérale 209 en vigueur aux États-Unis et catégorie 5 selon la norme ISO 14644-1
Environnements explosifsLe robot ne doit pas être placé ou manipulé dans un environnement explosif.
Température ambiante
Humidité relative
Description Température
Manipulateur en cours de fonctionnement +5 °C à +45 °C
Robot complet pendant le transport et le stockage -25 °C à +55 °C
Robot complet pendant le transport et le stockage, pendant de courtes périodes (ne dépassant pas 24 heures)
jusqu'à +70 °C
Description Humidité relative
Robot complet pendant le transport et le stockage 95 % max. à température constante
Robot complet en cours de fonctionnement 95 % max. à température constante
3HAC 10765-1 Rev.E 15

1 Description
1.3.3 Montage du manipulateur
1.3.3 Montage du manipulateur
Charge maximale par rapport au système de coordonnées de base.
Illustration
Figure 5 Configuration des trous (dimensions en mm).
Charge d’endurance en fonctionnement
Charge maximale en arrêt d'urgence
Force xy ±1 500 N ±2 000 N
Force z (montage sur le sol) +2 800 ±500 N +2 800 ±700 N
Force z (montage inversé) -2 800 ±800 N -2 800 ±1 000 N
Couple xy ± 1 800 Nm ± 2 000 Nm
Couple z ± 400 Nm ± 500 Nm
35
245210
200
Ø0,25 A
15oØ35 H8 (2x)
Ø17,5
3820
LC Axe 1
200
2
Ø17,5
Ø35 H8 (2x)
A
16 Rev.E 3HAC 10765-1

1 Description
1.3.4 Schéma des charges
1.3.4 Schéma des charges
Figure 6 Poids maximal autorisé de l'outil monté sur la bride de montage dans différentes positions (centre de gravité).
Description
Z Reportez-vous au diagramme ci-dessus et au système de coordonnées, dans les caractéristiques du produit S4Cplus.
L Distance dans le plan X-Y entre l'axe Z et le centre de gravité.
J 0,012 kgm2
J Moment d'inertie du poids de manutention total.
100
200
300
100 200
2 kg
1,5 kg
(mm)
(mm)
50 150
50
150
250 1 kg
3 kg
4 kg
5 kg
Z
L
85
3HAC 10765-1 Rev.E 17

1 Description
1.3.5 Montage de l'équipement
1.3.5 Montage de l'équipement
IRB 1400
Figure 7 La zone grisée indique la position autorisée (centre de gravité) pour tout équipement supplémentaire monté sur le bras supérieur (dimensions en mm).
Pos Description
A Trous de montage de l'équipement M8 (2x) Profondeur 16.
B Poids maximal de l'ensemble des équipements : 10 kg.
C Poids maximal de l'ensemble des équipements : 18 kg.
A A
135 70
380
70
A A
10 kg maximum
200
220
170
30
18 kg maximum
=
= (C)
(B)
(A)
18 Rev.E 3HAC 10765-1

1 Description
1.3.5 Montage de l'équipement
IRB 1400H
Figure 8 La zone grisée indique la position autorisée (centre de gravité) pour tout équipement supplémentaire monté sur le bras supérieur (dimensions en mm).
Pos Description
A Trous de montage de l'équipement M8 (2x) Profondeur 16.
230
70
110
190
13570
10 kg maximum
A
170
30
A A
A
(A)
3HAC 10765-1 Rev.E 19

1 Description
1.3.5 Montage de l'équipement
Trous de montage de l'équipement
Figure 9 La zone grisée indique la position autorisée (centre de gravité) pour tout équipement supplémentaire monté sur le châssis (dimensions en mm).
Pos Description
A 19 kg maximum (total).
B Trous de montage pour les équipements, des deux côtés M8 (3x), R=75 Profondeur 16.
Ø50
150
B
B
15o
B B
(A)
(B)
20 Rev.E 3HAC 10765-1

1 Description
1.3.5 Montage de l'équipement
Bride d’outil
Figure 10 Interface mécanique, bride de montage (dimensions en mm).
D=
25
D=
50
H8 h8
45o D=6 H7
M6 (4x)
R 20
A
A
4
10
A - A
2
Ø0,05
Ø0,3
BC B
0,06 B(4x)90o
C
D=
12
3HAC 10765-1 Rev.E 21

1 Description
1.4.1 Introduction
1.4 Maintenance et dépannage
1.4.1 Introduction
GénéralitésLe robot ne nécessite qu'un entretien minimal en cours de fonctionnement. Il a été conçu pour un entretien aussi simple que possible :
• Des moteurs à courant alternatif ne nécessitant aucune maintenance sont utilisés.
• De l'huile et de la graisse sont utilisées pour les réducteurs.
• Le câblage est conçu pour durer et, en cas (improbable) de panne, sa conception modulaire facilite son changement.
MaintenanceLes opérations de maintenance suivantes sont requises :
• Lubrification des supports de ressort tous les six mois.
• Remplacement du filtre du transformateur/dispositif de refroidissement de l'unité d'entraînement tous les ans.
• Graissage des axes 5 et 6 tous les ans.
• Remplacement des batteries tous les trois ans.
Les intervalles de maintenance dépendent de l'utilisation du robot. Pour obtenir des informations détaillées sur les procédures de maintenance, reportez-vous à la section Maintenance du manuel du produit.
22 Rev.E 3HAC 10765-1

1 Description
1.5.1 Introduction
1.5 Mouvements du robot
1.5.1 Introduction
IRB 1400Positions extrêmes du bras du robot.
Type de mouvement Rayon d’action des mouvements
Axe 1 - Mouvement de rotation +170° à -170°
Axe 2 - Mouvement du bras +70° à -70°
Axe 3 - Mouvement du bras +70° à -65°
Axe 4 - Mouvement du poignet +150° à -150°
Axe 5 - Mouvement de flexion +115° à -115°
Axe 6 - Mouvement de pivot +300° à -300°
3HAC 10765-1 Rev.E 23

1 Description
1.5.1 Introduction
Figure 11 Positions extrêmes du bras du robot.
Pos Description
A Pour connaître les positions au centre du poignet et l'angle, reportez-vous au tableau de la page suivante.
(A)
-170º
10º
R348
Y
+1
-1
X
+170º
14401008
150511
50
Pos 6
Pos 1
Pos 3
Pos 7
Pos 0
Pos 5
Pos 4
Pos 2
Z
1195
600
475
56
3
1790
X
24 Rev.E 3HAC 10765-1
1 Description
1.5.1 Introduction
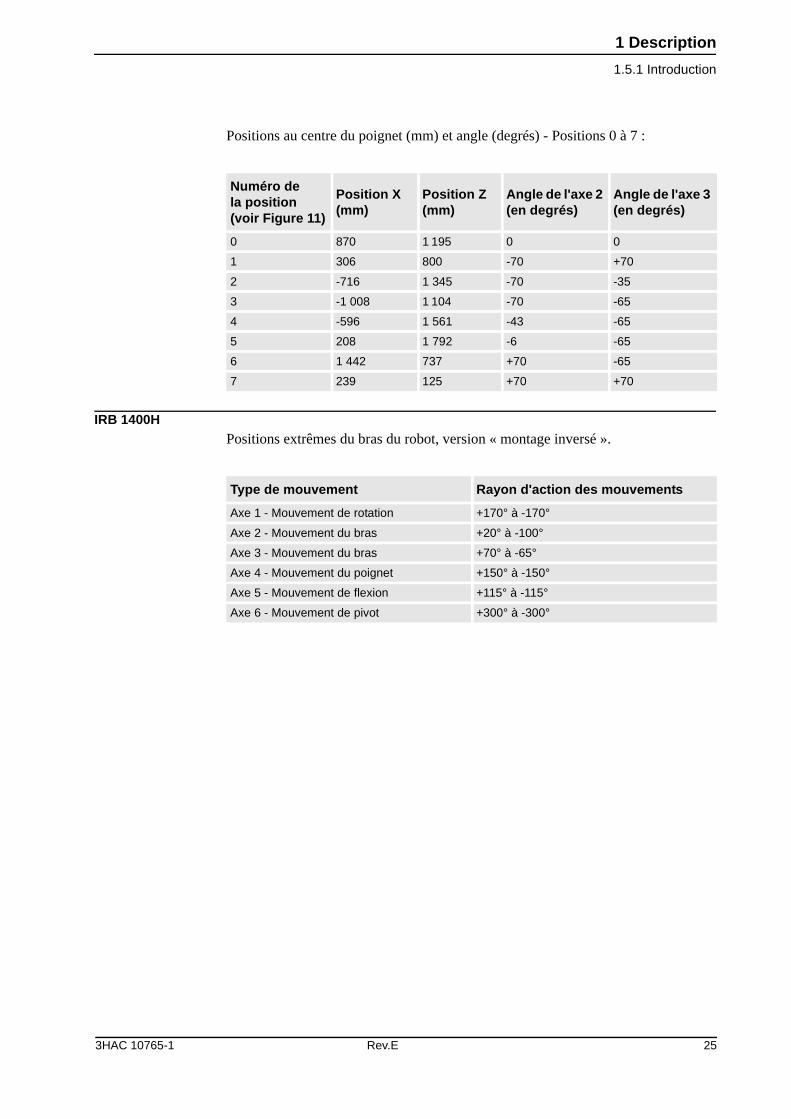
Positions au centre du poignet (mm) et angle (degrés) - Positions 0 à 7 :
IRB 1400HPositions extrêmes du bras du robot, version « montage inversé ».
Numéro de la position (voir Figure 11)
Position X (mm)
Position Z (mm)
Angle de l'axe 2 (en degrés)
Angle de l'axe 3 (en degrés)
0 870 1 195 0 0
1 306 800 -70 +70
2 -716 1 345 -70 -35
3 -1 008 1 104 -70 -65
4 -596 1 561 -43 -65
5 208 1 792 -6 -65
6 1 442 737 +70 -65
7 239 125 +70 +70
Type de mouvement Rayon d'action des mouvements
Axe 1 - Mouvement de rotation +170° à -170°
Axe 2 - Mouvement du bras +20° à -100°
Axe 3 - Mouvement du bras +70° à -65°
Axe 4 - Mouvement du poignet +150° à -150°
Axe 5 - Mouvement de flexion +115° à -115°
Axe 6 - Mouvement de pivot +300° à -300°
3HAC 10765-1 Rev.E 25

1 Description
1.5.1 Introduction
Figure 12 Positions extrêmes du bras du robot, version « montage inversé » (dimensions en mm). Vue latérale et vue du dessus du manipulateur.
Pos Description
A Pour connaître les positions au centre du poignet et l'angle, reportez-vous au tableau de la page suivante.
733 1282
150
1645
Pos 5
Pos 4
Pos 3
Pos 6Pos 2
Pos 10Pos 9
Pos 8Pos 1
Pos 0
Pos 7
Z
Axe 1 +145º -135º
Axe 1 ±170º
5 6
3 4
2
X
733 1282
-135º
Y
+170ºR1051
+1
-1
R372
Axe 2 -170º
(A)+145º
+170º
X
-170º
26 Rev.E 3HAC 10765-1

1 Description
1.5.1 Introduction
Positions au centre du poignet (mm) et angle (degrés) - Positions 0 à 10.
N° de la position (voir Figure 12)
Position X (mm)
Position Z (mm)
Angle de l'axe 2 (en degrés)
Angle de l'axe 3 (en degrés)
0 570 1 045 0 0
1 -30 861 -100 +70
2 -586 1 127 -100 +20
3 -1 104 918 -100 -25
4 -1 277 653 -100 -50
5 -1 282 770 -85 -65
6 -1 051 1 221 -60 -65
7 -158 1 645 -10 -65
8 734 891 +20 -10
9 633 527 +20 +20
10 254 494 -30 +70
3HAC 10765-1 Rev.E 27

1 Description
1.5.2 Performances conformes à la norme ISO 9283
1.5.2 Performances conformes à la norme ISO 9283
GénéralitésPour une charge nominale et une vitesse de 1 m/s sur le plan de test ISO incliné avec les six axes de robot en mouvement.
Les valeurs ci-dessus sont issues de la plage des résultats obtenus après le test d'un certain nombre de robots.
1.5.3 Vitesse
La surveillance permet d'empêcher les surchauffes dans les applications avec des mouvements intensifs et fréquents.
RésolutionEnviron 0,01o sur chaque axe.
1.5.4 Signaux
Répétabilité de pose unidirectionnelle RP = 0,05 mm
Précision de la trajectoire linéaire AT = 0,45 - 1,0 mm
Répétabilité de la trajectoire linéaire RT = 0,14 - 0,25 mm
Temps de positionnement minimal jusqu'à 0,2 mm de la position
0,2 - 0,35 sec. (sur une trajectoire linéaire de 35 mm)
0,45 -0,6 sec. (sur une trajectoire linéaire de 350 mm)
Axe numéro IRB 1400 IRB 1400H
1 120°/s 130°/s
2 120°/s 130°/s
3 120°/s 120°/s
4 280°/s 280°/s
5 280°/s 280°/s
6 280°/s 280°/s
Pour plus d'informations sur les signaux et l'alimentation en air des équipements supplémentaires connectés au bras supérieur, reportez-vous à la section Interface de l'application du chapitre 2 Spécification des variantes et des options.
28 Rev.E 3HAC 10765-1

2 Spécification des variantes et des options
2.1.1 Généralités
2 Spécification des variantes et des options
2.1 Introduction
2.1.1 Généralités
Les différentes variantes et options du robot IRB 1400 sont décrites ci-dessous.
Les numéros utilisés ici sont les mêmes que ceux utilisés dans la fiche technique.
Pour connaître les options du système de commande, reportez-vous à ses caractéristiques. Pour connaître les options logicielles, reportez-vous à Caractéristiques du produit - Options RobotWare.
2.1.2 Manipulateur
Variantes
Position de montage
Couleur du manipulateur
Protection
Option Type de robot
435-3 IRB 1400
435-4 IRB 1400H
Option Description
224-1 Monté sur le sol
224-2 Suspendu
Option Description
209-1 Le robot est peint en orange ABB.
209-2 Le robot est peint en blanc.
209-4-192 Le manipulateur est peint avec la couleur RAL choisie.
Option Description
287-1 Salle blanche
Robot homologué Salle blanche catégorie 100 selon la norme fédérale 209 en vigueur aux États-Unis.
Le robot porte la mention Salle blanche.
3HAC 10765-1 Rev.E 29

2 Spécification des variantes et des options
2.1.3 Interface de l’application
2.1.3 Interface de l’application
Signaux et alimentation en air des équipements supplémentaires connectés au bras supérieur
Option Description
218-8 Le tuyau pour l'air comprimé est intégré au manipulateur. La base comporte une entrée et le logement du bras supérieur une sortie.
Connexions : R 1/4" dans le logement du bras supérieur et sur la base ; 8 bars maximum.
Diamètre intérieur du tuyau : 6,5 mm.
Pour raccorder des équipements supplémentaires au manipulateur, utilisez les câbles intégrés au câblage du manipulateur.
Nombre de signaux : 12 signaux de 49 V, 500 mA.
Connecteur du bras supérieur : FCI 12 broches UT0014-12SHT
Connecteur sur la base du robot : FCI 12 broches UT0014-12PHT
218-3 Les câbles de commande reliés au dispositif d'alimentation en fil pour le soudage à l'arc sont intégrés au câblage du manipulateur.
Signaux de commande :
16 signaux de 49 V, 500 mA
Connecteur du logement du bras supérieur : FCI 23 broches UTG 618-23PN
Connecteur sur la base du robot : FCI 23 broches UT001823SHT
Signaux de puissance :
12 signaux de 300 V, 4 A
Connecteur du logement du bras supérieur : Burndy 12 broches UTG 614-12SN
Connecteur sur la base du robot : Burndy 12 broches UT001412PHT
Cette option n'est pas disponible pour l'IRB 1400H et n'est pas compatible avec 67A-D/671-674.
30 Rev.E 3HAC 10765-1

2 Spécification des variantes et des options
2.1.3 Interface de l’application
Connexion au manipulateur ou à l'armoire
Figure13
Connexion à l'armoire (longueur de câble)
Lampe de sécurité
Option Description
16-2 Manipulateur
Les signaux sont connectés directement à la base du manipulateur, à l'aide d'un connecteur Burndy 12 broches (voir option 041).
16-11
1. Remarque : Dans le cadre d’une application MultiMove M2004, les robotssupplémentaires ne disposent pas de module de commande. Les bornes à vis aveccâblage interne sont alors livrées séparément ; elles doivent être assemblées aumodule de commande du robot principal ou dans un autre système d'encapsulation(une armoire d'automate programmable, par exemple).
Armoire
Les signaux sont connectés au système de commande par des bornes à vis 12 pôles, Phoenix MSTB 2.5/12-ST-5.08.
If 43x
Si 218-8 ou 218-3 Si 16-1
Option Longueurs de câble
94-1 7 m
94-2 15 m
94-3 22 m
94-4 30 m
Option Description
213-1 Lampe de sécurité
Une lampe de sécurité avec un éclairage fixe orange peut être montée sur le manipulateur.
La lampe est active en mode MOTEURS EN MARCHE.
La lampe de sécurité est obligatoire sur les robots homologués UL/UR.
3HAC 10765-1 Rev.E 31

2 Spécification des variantes et des options
2.1.3 Interface de l’application
Interrupteur de positionInterrupteurs indiquant la position de l'axe 1. Un modèle disposant de deux interrupteurs fixes est également disponible. Les interrupteurs sont fabriqués par Telemecanique et sont de type déconnexion forcée.
Les deux interrupteurs divisent la zone de travail de l'axe 1 en deux zones de travail fixes, d'environ 175o chacune. Associée aux dispositifs de sécurité externes, cette option permet d'accéder à une zone de travail pendant que le robot travaille dans l'autre zone.
Connexion
Figure14 Connexions des signaux.
Remarque : il est déconseillé d'utiliser ces interrupteurs dans un environnement hostile comportant du sable ou des déchets.
Option Description
27-1 Deux interrupteurs, axe 1 fixe
Option Description
271-2 Manipulateur
Connexion sur la base du manipulateur avec un connecteur 23 broches FCI.
271-1 Armoire
Connexion sur la paroi de l'armoire. Les câbles des interrupteurs de position sont inclus.
Les signaux sont connectés à des bornes à vis 12 pôles, Phoenix MSTB 2.5/12-ST-5.08.
Pos Description
A Système de commande
(A)
32 Rev.E 3HAC 10765-1

2 Spécification des variantes et des options
2.1.3 Interface de l’application
Longueurs de câbleSeulement disponibles avec l'option 271-1 - connexion à l'armoire.
Kit de connexionConnecteurs séparés, adaptés aux connecteurs pour l'interface de l'application et les interrupteurs de position.
Le kit est composé de connecteurs, de broches et de bornes.
Limite du rayon d’actionPour accroître la sécurité du robot, le rayon d'action des axes 1, 2 et 3 peut être limité.
Option Longueurs de câble
273-1 7 m
273-2 15 m
273-3 22 m
273-4 30 m
Option Description
431-1 Pour les connecteurs du bras supérieur, dans le cas de l'interface de l'application, option 218-8.
239-1 Pour les connecteurs du pied, dans le cas d'une connexion au manipulateur, option 16-2.
426-1 Pour la connexion aux interrupteurs de connexion et la connexion au manipulateur, options 27-1 et 271-2.
Option Description
28-1 Axe 1
Le rayon d'action de l'axe 1 peut être limité. À l'aide de systèmes de butée, le rayon d'action peut être réduit de +150°-150°, le plus petit rayon d'action possible étant de +50°. Il est possible d'appliquer une limite comprise entre 50° et 150° à n'importe quelle position ; il suffit pour cela d'usiner des trous M10 et de monter les butées. Le kit comprend des butées et des vis, ainsi que des instructions.
32-1 Axe 2
Si vous ajoutez des butées d'arrêt, le rayon d'action de l'axe 2 peut être réduit de +50°/-30° (pour la version « montage sur le sol ») et de -20°/-60° (pour la version « montage inversé »).
34-1 Axe 3, monté sur le sol (modèle 1400H exclu)
L'axe 3 peut être réduit de manière à empêcher tout déplacement au-dessus de l'horizontale ; il est également possible d'appliquer un déplacement de 10° maximum au-dessus de l'horizontale.
3HAC 10765-1 Rev.E 33

2 Spécification des variantes et des options
2.1.3 Interface de l’application
34 Rev.E 3HAC 10765-1

3 Accessoires
3 Accessoires
GénéralitésDe nombreux outils et équipements sont spécialement conçus pour le robot.
Logiciel de base/options logicielles du robot et du PCPour plus d'informations, reportez-vous aux caractéristiques du produit IRC5 pour M2004 et S4Cplus pour M2000, ainsi qu'aux options de RobotWare.
Périphériques du robot• Track Motion
• Unités moteur
3HAC 10765-1 Rev.E 35

3 Accessoires
36 Rev.E 3HAC 10765-1

Index
A
accessoires, 35alimentation en air, 30arrêt d'urgence, 13arrêt de l'espace de sécurité, 14
retardé, 14
B
bride de montage, 21
C
charge, 15, 16charge utile, 15commande Hold-to-run (nécessitant une action main-tenue), 14conditions d'exploitation, 15connexions des signaux, 30contrôle de la vitesse, 13couleur du manipulateur, 29
D
dépannage, 22dispositif de refroidissement, 8
E
entretien, 22équipement
charge supplémentaire autorisée, 18montage, 18
équipement supplémentaireconnexions, 30
espace de travaillimitation, 14, 33
exigences d'encombrement, 8
G
gâchette de validation, 13
H
homologation UL, 12humidité, 15
I
indicateur de position d'entretien, 32installation, 15interface mécanique, 21interrupteur de position, 32
K
kit de connexion, 33
L
lampe de sécurité, 14, 31
M
maintenance, 22montage
équipement supplémentaire, 18
robot, 16mouvements, 23
N
niveau de bruit, 8normes, 12normes de protection, 15
O
options, 29
P
performances, 28Périphériques du robot, 35poids, 8
R
rayon d'action des mouvementsespace de travail, 23
répétabilité, 28
S
schémas des charges, 17sécurité, 12sécurité incendie, 14structure, 7
T
température, 15
V
Variantes, 29variantes, 29versions du robot, 8vitesse réduite, 13
3HAC 10765-1 Rev.E 37

Index
38 Rev.E 3HAC 10765-1


ABB RoboticsS-721 68 VÄSTERÅSSUÈDETéléphone: +46 (0) 21 344000Télécopie: +46 (0) 21 132592
3HA
C 1
0765
-1, R
évis
ion
E, f
r