canada and the international space station program: overview and status
TRANSCRIPT

~ Pergamon www.elsevier.com/locate/actaastro
ActaAstronautica Vol. 51, No. 1-9, pp. 591-600, 2002 © 2002 Published by Elsevier Science Ltd
Printed in Great Britain P I I : S0094-5765(02)00077-2 0094-5765/02 $- see front matter
CANADA AND THE INTERNATIO~NAL SPACE STATION PROGRAM: OVERVIEW AND STATUS
Graham Gibbs, Extemal Relations, Washington Office Savi Sachdev, Director General, Space Systems
Canadian Space Agency Montreal, Canada
ABSTRACT
The twelve months since IAF 2000 have been perhaps the most exciting, challenging and rewarding months for Canada since the beginning of our participation in the International Space Station program in 1984. The highlight was the successful launch, on- orbit check out, and the first operational use of Canadarm2, the Space Station Remote Manipulator System, between April and July 2001. The anomalies encountered and the solutions found to achieve this success are described in the paper.
The paper describes, also, the substantial progress that has been made, during the twelve months since IAF 2000, by Canada as it continues to complete work on all flight-elements of its contribution to the International Space Station and as we transition into real-time Space Station operations support and Canadian utilization.
Canada's contribution to the International Space Station is the Mobile Servicing System (MSS), the external robotic system that is key to the successful assembly of the Space Station, the maintenance of its external systems, astronaut EVA support, and the servicing of external science payloads.
The MSS ground segment that supports MSS operations, training,
sustaining engineering, and logistics activities is reaching maturity. The MSS Engineering Support Center and the MSS Sustaining Engineering Facility are providing real-time support for on-orbit operations, and a Canadian Payloads Telescience Operations Center is now in place. Mission Controllers, astronauts and cosmonauts from all Space Station Partners continue to receive training at the Canadian Space Agency. The Remote Multi Purpose Room, one element of the MSS Operations Complex, will be ready to assume backroom support in 2002.
Canada has completed work on identifying its Space Station utilization activities for the period 2000 through 2004. Also during the past twelve months the CSA drafted and is proceeding with the approval of a Canadian Space Station Commercialization Policy.
Canadian astronauts have now participated in three ISS assembly missions - Julie Payette on STS-96, Marc Garneau on STS-97, and Chris Hadfield on STS-100 in April 2001 during which he performed Canada's first EVA and the successful installation of the Space Station Remote Manipulator System. © 2002 Published by E l s e v i e r S c i e n c e Ltd.
592 52nd IAF Congress
Mobile Servicing System
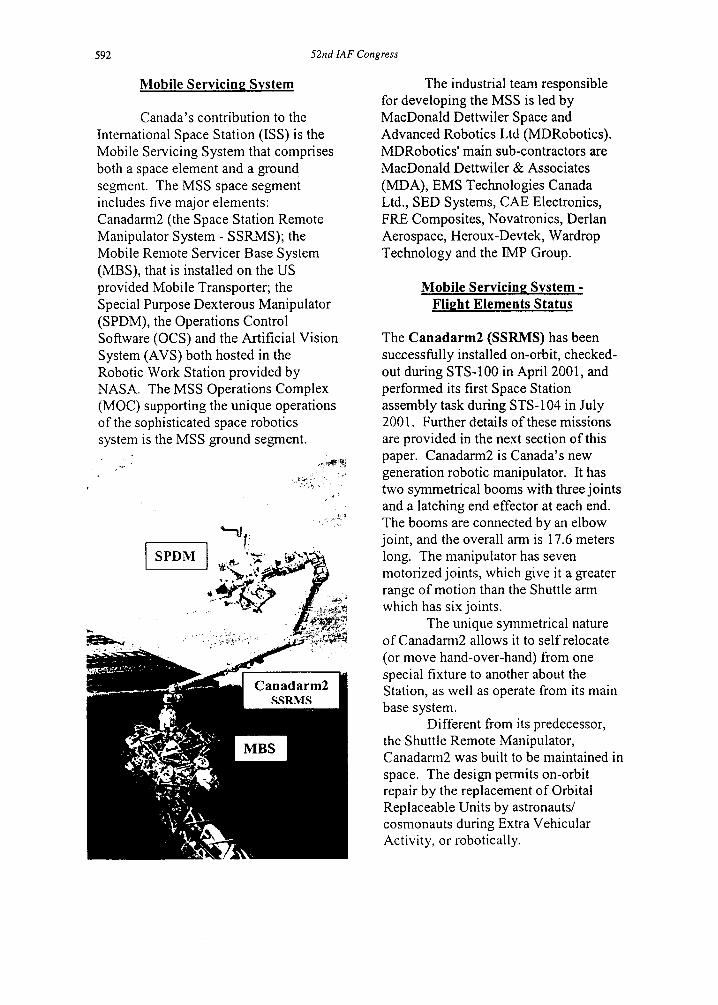
Canada's contribution to the International Space Station (ISS) is the Mobile Servicing System that comprises both a space element and a ground segment. The MSS space segment includes five major elements: Canadarm2 (the Space Station Remote Manipulator System - SSRMS); the Mobile Remote Servicer Base System (MBS), that is installed on the US provided Mobile Transporter; the Special Purpose Dexterous Manipulator (SPDM), the Operations Control Software (OCS) and the Artificial Vision System (AVS) both hosted in the Robotic Work Station provided by NASA. The MSS Operations Complex (MOC) supporting the unique operations of the sophisticated space robotics system is the MSS ground segment.
I I
The industrial team responsible for developing the MSS is led by MacDonald Dettwiler Space and Advanced Robotics Ltd (MDRobotics). MDRobotics' main sub-contractors are MacDonald Dettwiler & Associates (MDA), EMS Technologies Canada Ltd., SED Systems, CAE Electronics, FRE Composites, Novatronics, Derlan Aerospace, Heroux-Devtek, Wardrop Technology and the IMP Group.
Mobile Servicing System - Flight Elements Status
The Canadarm2 (SSRMS) has been successfully installed on-orbit, checked- out during STS-100 in April 2001, and performed its first Space Station assembly task during STS-104 in July 2001. Further details of these missions are provided in the next section of this paper. Canadarm2 is Canada's new generation robotic manipulator. It has two symmetrical booms with three joints and a latching end effector at each end. The booms are connected by an elbow joint, and the overall arm is 17.6 meters long. The manipulator has seven motorized joints, which give it a greater range of motion than the Shuttle arm which has six joints.
The unique symmetrical nature of Canadarm2 allows it to self relocate (or move hand-over-hand) from one special fixture to another about the Station, as well as operate from its main base system.
Different from its predecessor, the Shuttle Remote Manipulator, Canadarm2 was built to be maintained in space. The design permits on-orbit repair by the replacement of Orbital Replaceable Units by astronauts/ cosmonauts during Extra Vehicular Activity, or robotically.

52nd IAF Congress 593
Manufacturing of the Mobile Remote Servicer Base System (MBS) has been completed and the flight element was delivered to the Kennedy Space Center on August 31, 2000 and subjected to Multi Element Integration Testing in early 2001. Only a few further integration tests at the Space Station level remain to be carried out. The MBS is scheduled to be launched to the Space Station on mission UF-2 in April 2002.
The Special Purpose Dexterous Manipulator (SPDM) is sufficiently dexterous to be able to manipulate small payloads (e.g. external Station batteries) located within the Space Station tress. It has two arms each 3.3m long and each with 7 degrees of freedom and a one degree of freedom body. Five cameras are mounted on the SPDM. Manufacture of the SPDM is nearing completion with
its Acceptance Review scheduled for December 2001. Delivery to the Kennedy Space Center will occur in 2003 and its launch to the Space Station on UF-4 in October 2003 as per Assembly Sequence revision F. Note that at the time of writing the Space Station assembly sequence is under review with the result that the launch date for the SPDM may change to 2004/5.
One of Canada's lesser known contributions to the Intemational Space Station is the Canadian Space Vision System (CSVS) that is used in conjunction with the Canadian built Shuttle Remote Manipulator System, and its Space Station equivalent the Artificial Vision Unit. The CSVS has been in routine use since its first operational use during the Space Station's second assembly flight in December 1998. The CSVS, through a sophisticated and high speed computational process, provides the Shuttle manipulator operator or the Space Station MSS Robotic Operator with precise position and orientation information of the operation by processing images from cameras. The Space Station Artificial Vision System has successfully completed a series of integration tests at the NASA ISS Software Integration Laboratory at the Johnson Space Center, and Multi-

594 52nd IAF Congress
Element Integration and Testing is underway at KSC. The system was used successfully to deploy and install the Space Station Airlock, Quest, in July 2001.
In a paper such as this it is impossible to give proper justice to the complexity of these missions, the finding of the fault, and the resultant unparalleled success of the endeavour. Regardless, the authors have attempted to at least provide a summary of the events - for the record.
Launch, Check-Out, Operation of Canadarm2
The new Canadarm2 was successfully installed on the Space Station during the STS-100 mission (Space Station Assembly Flight 6A) in April 2001. Then during the STS-104 mission (Space Station Assembly Flight 7A) Canadarm2 was used for the critical task of installing the U.S. Airlock and supporting the deployment of four high pressure tanks. In between these two missions Canadarm2 was subjected to an exhaustive on-orbit check-out that included an around-the-clock search by ground-based engineers in Canada to identify and find a solution for an anomaly that appeared a few weeks after mission 6A. The anomaly, corrected by a software patch, was associated with a Built In Test (BIT) feature in a 1553 data bus chip.
The installation of Canadarm2 began on flight day 4 of mission 6A (the day after the Shuttle Endeavour docked to the Space Station). On this day Canadian astronaut Chris Hadfield performed Canada's first EVA, with U.S. astronaut Scott Parazynski. During this 6 hours EVA the Shuttle arm (Canadarml) moved the SpaceLab Pallet with Canadarm2 (folded) fi'om the Shuttle's cargo bay to a special fixture on the U.S. Destiny Laboratory. The EVA astronauts then connected power, video and data communications cables from the exterior of the Lab to the SpaceLab Pallet/Canadarm2. Next, while Canadarm2 was warming up, Chris Hadfield rode the Shuttle's Canadarml and installed a UHF antenna to the Destiny Lab. Next, the astronauts removed the thermal blankets from Canadarm2 and restraining bolts so that that they could then unfold the main Canadarm2 booms (each boom was designed with a one-time-use-only hinge, so that the entire manipulator would fit in the Shuttle cargo bay for launch). The unfolding of the booms was not without its challenges and manual torquing of some bolts was necessary.

52nd IAF Congress 595
After the EVA the Robotics Workstation, in the U.S. Lab, was used for the first time to begin the check-out of Canadarm2.
On flight day 5 limited static and unloaded dynamic testing of Canadarm2 was carried out before it was commanded to grapple the permanent Power Data Grapple Fixture (PDGF) on the U.S. Lab Destiny. Flight day 6 included the second planned EVA. During the EVA the temporary wiring to the Canadarm2 on the SpaceLab Pallet, connected during the first EVA, was reconfigured so as to make the permanent PDGF live. After the EVA Canadarm2 was commanded to unlatch itself from the SpaceLab Pallet grapple fixture. This represented the first instance of self relocation of the arm, the former wrist/end effector now becoming the shoulder and base. The arm was then was commanded to pick up the SpaceLab Pallet for its first loaded dynamic tests. On flight day 7 the first ever robotic "handshake" in space took place when Canadarm2 handed off the SpaceLab Pallet to Canadarm 1 for placement of the Pallet back into the Shuttle cargo bay for its return to earth.
This particular maneuver needed to be carefully choreographed using only single joint motions so as not to put major demands on the Station's computers that had been having problems during this mission.
After the highly successful STS- 100 mission the on-orbit check-out of Canadarm2 continued in preparation for the all critical installation of the U.S. Airlock in July, a task that could only be performed by the Station's manipulator. Early in June, during tests on the redundant channel, the Canadarm2 brakes engaged without warning and apparently for no reason. An exhaustive series of tests confirmed that this had been a one-time event and not an intermittent failure. Soon after, the engineers were challenged once again when an intermittent communication anomaly between the arm computer and a joint electronics unit in the back-up string occurred. The reason for the failure was not immediately apparent, and more troubling was the intermittent nature of the problem. During several weeks diagnostic software patches were sent up to Canadarm2 to help identify tile problem. Eventually the problem

596 52nd 1AF Congress
was identified to be a latent design defect in a MIL-Standard-1553 interface processor and a part of the processor that could be rendered inoperative without affecting the integrity of the processor. A masking software patch was installed and Canadarrn2 checked out and declared ready for the all-important Air Lock installation.
The STS-104 mission and the installation of the Air Lock, Quest, was a success. Canadarm2 was also used for the deployment of four high-pressure oxygen and nitrogen tanks, which were installed around the Airlock.
MSS. Operations - Ground Segment
The MSS Operations Complex (MOO) is a state-of-the-art center at CSA headquarters in St. Hubert (near Montreal), Quebec. It includes several facilities for Space Station-MSS mission planning and real-time operations support; astronaut, cosmonaut and mission controllers training on MSS operations; MSS sustaining engineering and logistics; and payloads telescience operations.
The success of these missions is a tribute to the remarkable work of the Canadian MSS ground-based engineering team, and the superlative manner in which the NASA team and ISS crew worked with the MSS team. The capabilities of this international partnership were tested - and they passed with flying colors!
The MSS Operations Complex (MOC) began operations early in 1998 and since then has been progressively up-graded or enhanced to meet evolving mission requirements. The MSS Ground Segment is in an advanced state of maturity.

52nd IAF Congress 597
Mobile Servicing System - Training Status
Training of Astronauts and Cosmonauts at CSA began in April 1998. The initial training was limited to the operation of the Canadarm2. The training now includes the MBS, and training material for SPDM is under development. To date the crews for ISS Expeditions 2, 3, 4, and 5, Mission Controllers and Instructors have received training at CSA Headquarters. Training activities at the CSA are now being conducted on a routine basis in support of the ISS.
Canada to support MSS operations from the Saint Hubert operational facilities starting with Mission ISS 9A.
Canadian Astronaut Office Activities
Canada's astronaut corps has been based at NASA's Johnson Space Center for several years, undergoing Shuttle Mission Specialist training and others Space Station systems training. Canadian astronauts are also appointed to technical duties such as CapCom for Shuttle Missions and Procedures Testing in Russia. Canadian astronaut Dafydd Williams is Head of NASA's Space and Life Sciences activities in Houston.
Julie Payette who became Canada's first mission specialist astronaut to visit the International Space Station has spent the past twelve months shuttling between Russia and North America in support of payload integration activities. She is now responsible for Crew Office Liaison in Europe.
The unique training program developed by CSA allows the trainee to be educated in robotics and the MSS in a Computer Based Training multimedia classroom environment, then pursue a hands-on session in a realistically simulated environment, augmented by a virtual reality training environment that offers a unique perspective of the task being performed. This is followed by a debriefing session in the multimedia classroom where the simulated session can be replayed, examined and analyzed.
Several Canadians have been trained as Mission Controllers at the Johnson Space Center, and will return to
In November 2000 Canadian mission specialist, and veteran astronaut, Marc Gameau undertook his third space mission on STS-97 (Space Station Flight 4A) to deliver the Space Station's first set of U.S. provided solar arrays, batteries and radiators, as well as communications equipment.

598 52nd IAF Congress
Marc Gameau has since returned to Canada and is the CSA's Executive Vice President.
for all pre-flight, in-flight and post-flight ground-b~ed medical activities, which included Mission Control Center- Houston Surgeon console operations, for the STS -97 and STS-100 missions.
CSA Space: Science and ISS Utilisation
During STS-100 (Space Station Flight 6A) mission in April 2001 Canadian mission specialist Chris Hadfield became Canada's first astronaut to conduct an EVA when he helped to install Canadarm2 (SSRMS). In July Chris Hadfield was selected to be the first non-U.S, astronaut to be Director Operations Russia, managing astronaut training activities in Star City, Russia.
0 In addition to Canadian astronaut
activities the CSA Astronaut Office supports a variety of ISS crew operations activities. For example, within the Canadian Astronaut Office thereis a Director, Operational Space Medicine. The CSA provided the Flight Surgeon
Principal activities under our Microgravity Science Program include research in materials, fluid science and biotechnology. Facilities to be used or developed include a protein crystallization facility, small-scale furnace and a fluid physics module. These will be integrated with the Canadian Microgravity Sciences Program developed Microgravity Vibration Isolation Mount which provides a quality microgravity environment for experimental payloads. First generation MIMs have been tested and used on NASA's parabolic aircraft, the Shuttle and the Mir Space Station.
Canada's Life Science Program focuses on bone and muscle loss (osteoporosis), the cardiovascular system (primarily cardiovascular adaptation), the spinal cord and the effects of radiation as related to long duration space flight. In addition the space environment is used to study neuroscience and developmental

52nd IAF Congress 599
. , r
biology. Canada has flown facilities in support of these disciplines on the Shuttle and will continue during the early years on ISS.
The first Canadian experiment, the Hoffman Reflex (H-Reflex), directed by Dr. Douglas Watt of McGill University, was taken to the Station on board the Shuttle in March and again in August 2001. The H-Reflex experiment will examine changes to spinal cord excitability, an important element in reflexes that keep earth bound humans upright when they trip or slip on ice. The H-Reflex experiment is expected to lead to improvements in the efficiency of in-flight exercise and astronauts recovery time after flight. It may also lead to managing balancing disorders on earth.
Later in 2001 a Canadian a radiation monitoring experiment, inserted into the pockets of the EVA suits, will be on board the Station.
Five further Canadian experiments are currently in preparation for early ISS utilization. The first major Canadian payload facility, the Insect Habitat is currently scheduled for ISS Increment 3.
Food chamber
These programs are coordinated through Canadian participation in the International Space Life Sciences Working Group.
Space Station Commercialisation
In exchange for its contribution to the ISS, Canada received ISS access rights equivalent to one rack per year and one external pallet adapter per year. In order to maximize its ISS utilization rights and to assist the Canadian space industry in positioning itself in this emerging market, the CSA has determined to commercialize half of its ISS volume-space.
50%for Commercialization
" LI ( ' ~ . "
, ~ . " \ ~ 7 . ? / , [ ~ . . . . . . . . . .
The Canadian Space Agency, in consultation with other responsible Canadian Government Departments and other stakeholders, has developed a Space Station commercialization policy. The chosen approach favors the establishment of a fully commercial entity (the Canadian ISS Access Company - CIAC) mandated to develop half of the Canadian ISS volume-space

600 52nd IAF Congress
and licensed to sell its access to end- users. Further, the approach is open to international participation and accepts non-conventional applications of ISS utilization, which are in compliance with the Space Station Agreements including multilateral commercial utilization guidelines being developed.
In order to render Canadian ISS assets attractive and affordable to small businesses, the CSA will make them available at the smallest component that is practical such as a locker-size or an External Pallet Adapter-site. Reducing those sites to even smaller aggregates and adding value by developing facilities with unique characteristics and capabilities to accommodate particular payloads will multiply the number of experiments, thus further reducing costs. It is our opinion that this site enhancement is crucial to the success of ISS commercialization and can most effectively be accomplished by the private sector.
During the next six months the CSA will undertake a competitive bidding process to select a CIAC. The resulting revenues from the commercialization activities will be shared. The CSA's share will be used to enable further ISS utilization by offsetting unfunded ISS Common System Operations Costs, funding the development of facility-class payloads, or facilitating payload transportation services to/from the ISS.
The CSA continues to participate in the Multilateral Commercialization Group, which was formed some two years ago to provide the Space Station partners with a multilateral forum to consult and coordinate on policies and procedures related to ISS commercial development. In the coming months, multilateral guidelines will be developed
and implemented for commercial activities related to advertising, entertainment, commercial research and- development, merchandising and space travel.
Multilateral Agreements
During the past twelve months Canada participated with the other ISS Partners in completing or continuing work on various multilateral documents pertaining to ISS crew operational matters. For example, the Government of Canada has approved the Code of Conduct for the International Space Station Crew (CCOC) and the Multilateral Coordination Board has approved the Charter for the Multilateral Crew Operations Panel. Work on Crew Selection criteria is nearing completion.
Conclusions
It is clear that during the past twelve months major progress has been made by all the ISS Partners. The launch, successful checkout and the first operational use of Canadarm2 was the most important event for Canada, and has paved the way for the continuation of the Space Station assembly. During the past year the Partnership has been challenged technically, programmatically and politically. In all cases the Partners demonstrated once again the maturity of the Partnership and their ability to work together.
Canadian Space Station Program accomplishments during the past twelve months are indicative of the maturity of Canada's development and operations activities in space robotics, microgravity science, and Canada's continuing strong commitment to the International Space Station.