c03-linealización y función de transferencia_2013
DESCRIPTION
Control automaticoTRANSCRIPT

1
Modelos de procesos, Linealización y Función de Transferencia

4
Modelo de Proceso o Sistema
Sistema mecánico masa-amortiguador-resorte.
)()(
2
)(2
)( ttt
t ykdt
dyb
dt
ydMr

5
Modelo de Proceso o Sistema
Sistema mecánico masa-amortiguador-resorte.
)()()( t
t ydt
dytv
Si definimos la velocidad de la masa como:
Entonces:
)()(
2
)(2
)( ttt
t ykdt
dyb
dt
ydMr
t
ttt
t dtvkvbdt
dvMr
0)()(
)()(

6
Modelo de Proceso o Sistema
Circuito RLC
t
ttt
t dtvLdt
dvC
R
vr
0)(
)()()(
1

7
Modelos Análogos
Sistema mecánico masa-amortiguador-resorte.
Circuito R-L-C
Respuesta dinámica
t
ttt
t dtvkvbdt
dvMr
0)()(
)()(
t
ttt
t dtvLdt
dvC
R
vr
0)(
)()()(
1

8
Aproximaciones lineales de un sistema físico
Propiedades de un sistema lineal: superposición y homogeneidad.
La característica estática de un proceso complejo es en general no lineal. Para propósitos de simplificación puede utilizarse una aproximación lineal.

9
Aproximaciones lineales de un sistema físico
Sistema mecánico no lineal.

10
Aproximaciones lineales de un sistema físico
Empleando desarrollo en serie de Taylor y conservando sólo términos de primer orden puede obtenerse la ecuación de estado aproximada de un sistema dinámico no lineal.

11
Modelos linealizados
Aproximaciones lineales de las ecuaciones no-lineales
Más fáciles de manipular matemáticamente pero su rango de validez es limitado.
hkqtdhd
A hqtdhd
A
hqtdhd
A

12
Linealización
Desarrollo en serie de Taylor sobre un punto de operación u0, y0, z0, ….
...)zz(zf
)yy(yf
)uu(uf
)z,y,u(f)z,y,u(f
0)z,y,u(f 0)z,y,u(f
00
0
0
00
000
000
zzz yyy uuu 0zzf
yyf
uuf
000000
Ecuación lineal en las nuevas variables u, y, z

13
Modelo Linealizado del Depósito
q
h
F
Ecuación diferencial lineal
0qhh2
kdt
hdA
1qf
h2
khf
Ahf
0)qq(qf
)hh(hf
)hh(hf
q,h,h 0)q,h,h(f
0hkqtdhd
A
0
0000
0
0
00
00
000
Variables desviación:
h = h - h0
q = q - q0
hkqtdhd
A

14
El valor de los coeficientes depende del punto de linealización
k
h2K
k
h2A
qKhdt
hd
qk
h2h
dthd
k
h2A
0qhh2
kdt
hdA
00
00
0
Variables desviación
h = h - h0
q = q - q0
Modelo Linealizado del Depósito
q
h
F

15
Modelos linealizados
t
U0
U
t
Y0
Y
Las variables u e y son cambios sobre un punto de operación U0 , Y0
El rango de validez está limitado a un entorno del punto de operación
YUProceso
)t(Y)t(Y)t(y
)t(U)t(U)t(u
0
0

16
0)aa(af
))p(p(pf
)qq(qf
)qq(qf
0)a,p,q,q(f
ghq)AfL
Ca1
(p
tdqd
AL
00
000
00
0
0
0
0
0
222
v2
0
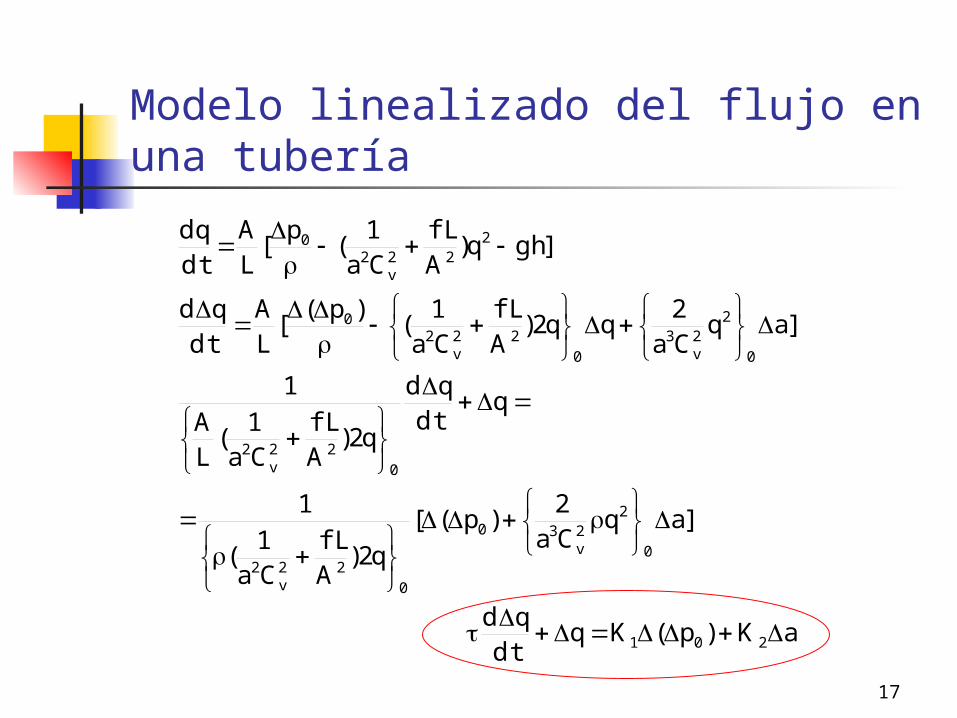
Flujo en una tubería
q
pv
a h
p0
Ecuación diferencial no-lineal
17
Modelo linealizado del flujo en una tubería
aK)p(Kqtdqd
]aqCa2
)p([
q2)AfL
Ca1
(
1
qtdqd
q2)AfL
Ca1
(LA
1
]aqCa2
qq2)AfL
Ca1
()p(
[LA
tdqd
]ghq)AfL
Ca1
(p
[LA
tdqd
201
0
22v
30
022
v2
022
v2
0
22v
30
22v
20
222
v2
0

18
VRc
V2q)TT(Tq
tdTd
Ahe
00i0
0)VV(Vf
)qq(qf
)TT(Tf
)TT(Tf
0)V,q,T,T(f
cte.h y T si Rc
V)TT(q
tdTd
Ah
00
0
0
00
00
ie
2
i
q
V R T
Ti
VKqKTtdTd
VRqcV2
)TT(T
tdTd
qAh
21
0e
0
0
0i
0
Modelo linealizado de calentador de agua

19
Semejanza formal
q
V R T
Ti
VKqKTtdTd
21
q
pv
a h
p0
aK)p(Kqtdqd
201

20
Transformada de Laplace
La representación de fenómenos físicos a través de ecuaciones diferenciales lineales permite usar la Transformada de Laplace como herramienta para el diseño de controladores.
La Transformada de Laplace transforma una ecuación diferencial lineal en el dominio del tiempo a una ecuación algebraica de variable compleja.

21
Transformada de Laplace
Laplace de compleja le variabjs
dte)t(f)s(F)t(f0
st
L
f(t) función temporal
f(t) = 0 para t < 0 t
f(t)
Cambio de variable: t s

22
Transformada de Laplace
•La resolución del problema en el dominio s de X(s) es algebraica.
•La interpretación y expresión de la solución se realiza en el dominio t usando la transformada inversa.
Cambio de variable s t
j
j
st1 dse)s(X)s(X)t(x LTransformada inversa

23
Ejemplo: Función escalón
s
k
s
ekdtkedte)t(f)s(F)t(f
0
st
0
st
0
st
L
f(t) función escalón
f(t) = 0 para t < 0
f(t) = k para t >= 0
t
f(t)=k
Se recomienda utilizar las tablas de Transformadas de Laplace de las funciones más comunes.

24
Transformada de Laplace (Propiedades)
)s(bG)s(aFdte)t(gbdte)t(fadte)t(bg)t(af)t(bg)t(af
)s(bG)s(aF)t(bg)t(af
0
st
0
st
0
st
L
L
)s(sF)0(fdtse)t(f)t(fedtedt
)t(df
dt
)t(df
dtsedu)t(fveudtdt
)t(dfdvduvuvdvu
dtedt
)t(df
dt
)t(df)0(f)s(sF
dt
)t(df
0
st
00
stst
stst
0
st
L
LL

25
)s(Fede)(fedee)(fde)(fdte)dt(f
t;d0tdtdte)dt(f)dt(f
)s(Fe)dt(f
sd
0
ssd
0
ssd
d
)d(s
0
st
0
st
sd
L
L
)(f)0(f)0(f)(f)0(f)t(f
)0(fdttd
)t(fd)0(fdte
td
)t(fdlim)s(sFlim
)0(fdtetd
)t(fd)s(sF)s(sFlim)t(flim
0
00
st
0s0s
0
st
0st
Teorema del valor final
Transformada de Laplace (Propiedades)

28
Transformadas de Laplace

29
Transformadas de Laplace

30
Transformadas de Laplace

31
Transformadas de Laplace

32
Resolver
Solución de Ecuaciones Diferenciales
utdud
ytdyd
tdyd
5,022
2
donde
;0;0 2)(
)0()0(
tt eu
td
ydy para t
0
u
tdud
Lytdyd
tdyd
L 5,022
2
Usando la Trasnformada de Laplace:

33
Solución de Ecuaciones Diferenciales
)(12
5,0)(
2sU
sss
sY
2
1)(
ssUSe sabe
que
Resolviendo y reordenando:
; entonces: )2(
1
)12(
)5,0()(
2
sss
ssY
Aplicando la Transformada Inversa:
)2(
1
)12(
)5,0()()(
211
ssss
LsYLty

34
Solución de Ecuaciones Diferenciales
Para resolver la ecuación anterior se debe realizar, previamente, la descomposición en fracciones parciales simples.
22
21
211
112)2(
1
1
)5,0(
)2(
1
1
)5,0(
)2(
1
)12(
)5,0()()(
s
cs
bs
ass
s
ss
sL
ssss
LsYLty
Donde: a=-2,5; b=2,5; c=-1,5
ttt
t eteesss
Ly
5,15,25,2
1
5,1
1
5,2
2
5,2 22
1)(

35
Solución de Ecuaciones Diferenciales
Por lo tanto, las ecuaciones diferenciales con condiciones iniciales se pueden resolver empleando Transformada de Laplace.
Resuelva la ecuación diferencial:
con condiciones iniciales:

36
Aplicación de la Transformada de Laplace
Para las siguientes condiciones iniciales:
)()(
2
)(2
)( ttt
t ykdt
dyb
dt
ydMr
Para el sistema masa resorte amortiguador visto anteriormente se tenía lo siguiente:
0)( tr oyy )0(
00
)( t
t
dt
dy
ksbsMybsM
sY o
2
)()(Entonce
s:

37
Aplicación de la Transformada de Laplace
Por lo tanto, al aplicar Transformada de Laplace, se obtiene que Y(s) es una razón de polinomios.
)(
)()()(
2 sqsp
ksbsMybsM
sY o

38
Aplicación de la Transformada de Laplace
)(
)()()(
2 sqsp
ksbsMybsM
sY o
Se denomina Ecuación Característica cuando el polinomio del denominador se iguala a cero, es decir:
q(s) = 0.
Las raíces la ecuación característica determinan el comportamiento de la respuesta en el tiempo. Estas raíces son llamadas polos
Las raíces del polinomio del numerador, p(s), se denominan los ceros del sistema.

39
Polos y Ceros
Para un caso específico: )2)(1(
)3()(
ss
yssY o
Para esta razón de polinomios se puede determinar el correspondiente diagrama de polos y ceros.
Diagrama de polos y ceros en el plano s.

40
Polos y Ceros
)s(D)s(N
asa...sasabsb...sbsb
G(s)01
1n1n
nn
011m
1mm
m
Ceros de G(s) = raíces de N(s) = 0
Polos de G(s) = raíces de D(s) = 0
0.382- ,618.2sen polos 01s3s
3sen cero 03-s
)382.0s)(618.2s(3s
1s3s3s
G(s)
2
2

41
Polos y Ceros
Según la ubicación de los polos en el plano s, la respuesta en el tiempo tendrá alguna característica.
Respuesta en el tiempo de un sistema de segundo orden.

42
Función de Transferencia
Caracteriza la relación entrada-salida de componentes o sistemas que pueden describirse por “ecuaciones diferenciales lineales”, invariantes en el tiempo.
Relación entre Transformada de Laplace de la salida (función respuesta) y la Transformada de Laplace de la entrada (función excitación) asumiendo condiciones iniciales cero.

43
Función de Transferencia
)( ; )1(1
)(0
)1(1
)(0 mnxbxbxbyayaya m
mmn
nn
Donde: y es la salida del sistema; x es la entrada del sistema; n y m es el orden de la derivada de la variable.
cero iniciales scondicione
ciaTransferen de Funciónentrada
salidasG
LL
)(

44
Función de Transferencia
La Función de Transferencia “G(s)” representa la dinámica del sistema mediante ecuaciones algebraicas.
La potencia de “s” más alta en el denominador identifica el orden del sistema; por lo tanto para la ecuación mostrada el orden del sistema es “n”.
nnnn
mmmm
asasasa
bsbsbsb
sX
sYsG
11
10
11
10
)(
)()(

45
FT del Depósito
q
h
F
k
h2K
k
h2A
qKhdt
hd
00
Aplicando Transformada de Laplace con c.i. nulas:
1sK
Q(s) H(s)

46
FT Circuito RCR
I1
CV EI1
dtIC
1E
dtIC
1RIV
1
11
)s(ICs
1)s(E
)s(ICs
1R)s(I)s(V
1
11
)s(V1RCs
1)s(I
Cs
1)s(E
)s(ICs
)1RCs()s(I
Cs
1R)s(I)s(V
1
111
1sK
V(s) E(s)
Aplicando Transformada de Laplace con c.i. nulas:

47
FT de Flujo en Tubería
qa
p0
aK)p(Kqtdqd
201
)s(A1s
K)s(P
1sK
)s(Q
)s(AK)s(PK)1s)(s(Q)s(Q)s(sQ
aK)p(Kqtdqd
21
21
201
LL
Aplicando Transformada de Laplace con c.i. nulas:
Q(s)
1sK1
1sK2
P(s)
A(s)
)s(A
)s(P
1sK
1sK
)s(Q 21

48
FT de Calentador de Agua
)s(V1s
K)s(Q
1sK
)s(T
)s(VK)s(QK)1s)(s(T)s(T)s(sT
VKqKTtdTd
21
21
21
LL
Tomando transformadas de Laplace con c.i. nulas:
T(s)
1sK1
1sK2
Q(s)
V(s)
q
V R T
Ti
VKqKTtdTd
21

49
Entradas Normalizadas
u y
tt
u
impulso
t=0
tu
escalón
t=0
u
rampa
t=0
t
u
t=0
seno

50
Ganancia de un Sistema
t
u
y
u
y
)0(G)s(U)s(Y
limK
uy
K
0s
equilibrioen
)1s)......(1s)(1s()1s)......(1s(K
)s(Gn21
m1

51
Retardo
)vL
t(T)dt(T)t(Td q
V R T
Ti TT
L
)s(V1s
Ke)s(Q
1sKe
)s(Te)s(T1
2ds
1
1ds
dsd
)s(V1s
K)s(Q
1sK
)s(T1
2
1
1
)1s)......(1s)(1s()1s)......(1s(Ke
)s(Gn21
m1ds
t
y
u
d

52
Aproximación de Pade
12ds
s2d
1
12ds
2ds
1e 2
2
ds
G(s) con un retardo “d” no es racional. Si se necesita, puede aproximarse el retardo por una expansión en serie:
)1s)......(1s)(1s()1s)......(1s(Ke
)s(Gn21
m1ds
s2d
1
s2d
1e ds
Aprox. de Pade de 2º orden
Aprox. de Pade de 1er orden