building a panorama image mosaics and...
TRANSCRIPT

1
Image Mosaics and Panoramas
Lots of slides from from Bill Freeman, Alyosha Efros, Steve Seitz and Rick Szeliski. Some slides are from Vaibhav Vaish, Yung-Yu Chuang, Darya Frolova, Denis Simakov, Alex RavAcha, and from Shmuel Peleg.
Building a PanoramaBuilding a Panorama
M. Brown and D. G. Lowe. Recognising Panoramas. ICCV 2003
Why Panoramas ?Why Panoramas ?
• Cartography: stitching aerial images to make maps
Manhattan, 1949 Google Maps

2
Google Street View
Slide from Brown & Lowe
• Virtual wide-angle camera– Consumer camera: 50˚ x 35˚
Slide from Brown & Lowe
• Virtual wide-angle camera– Consumer camera: 50˚ x 35˚– Human Vision: 176˚ x 135˚
3
Slide from Brown & Lowe
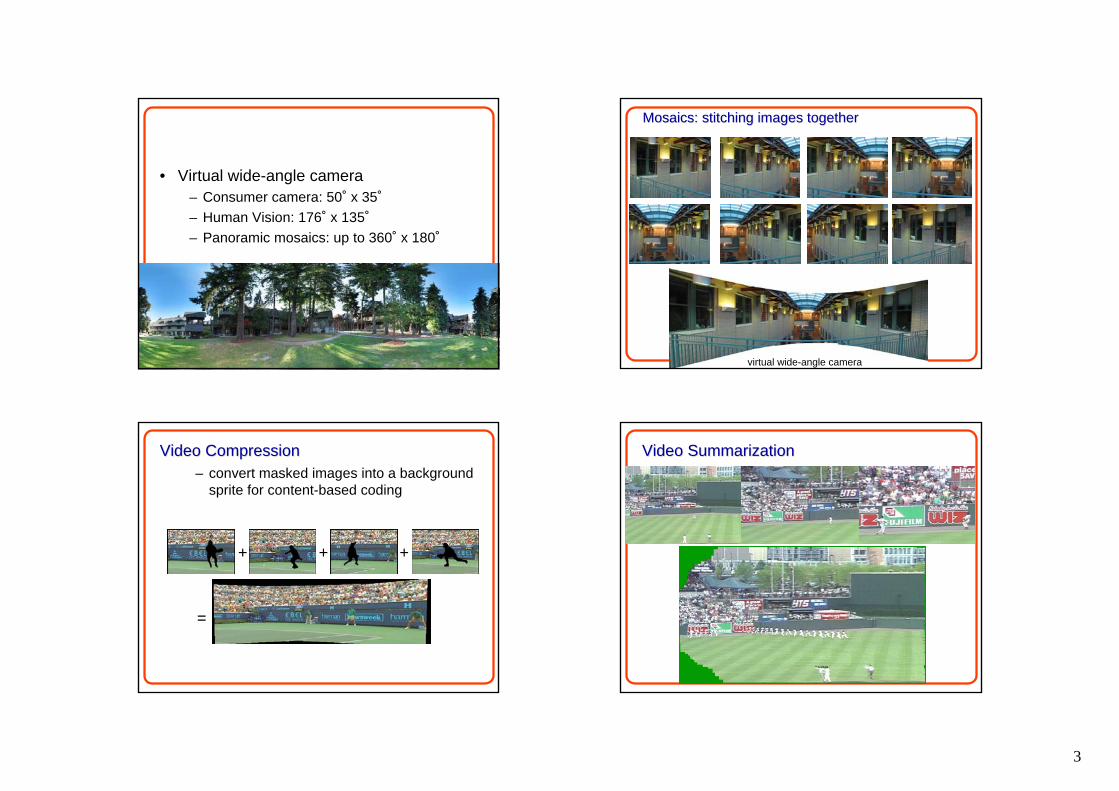
• Virtual wide-angle camera– Consumer camera: 50˚ x 35˚– Human Vision: 176˚ x 135˚– Panoramic mosaics: up to 360˚ x 180˚
Mosaics: stitching images togetherMosaics: stitching images together
virtual wide-angle camera
– convert masked images into a background sprite for content-based coding
+ + +
=
Video CompressionVideo Compression Video SummarizationVideo Summarization

4
• Virtual reality: a sense of being there
http://www.panoramas.dk/
• Video Panorama
The First Panoramas …The First Panoramas The First Panoramas ……
Paris, c. 1845-50, photographer unknown
How to create a panorama?How to create a panorama?
1. Take a sequence of images2. Compute transformation between second image and first3. Transform the second image to overlap with the first4. Blend the two together to create a mosaic5. If there are more images, repeat
Don’t we need the 3D geometry of the scene?

5
Panorama Panorama -- from Rotated Camerafrom Rotated Camera
If the sequence of images are taken from the sameposition (Rotate the camera about its optical center),then the 3D geometry of the scene is NOT needed.
First Panoramic CameraFirst Panoramic Camera
Al-Vista, 1899 ($20)
The CameraThe Camera
• http://www.reallyrightstuff.com/pano/index.html
A pencil of rays contains all viewsA pencil of rays contains all viewsas long as they have the same center of projection!
realcamera
syntheticcamera
6
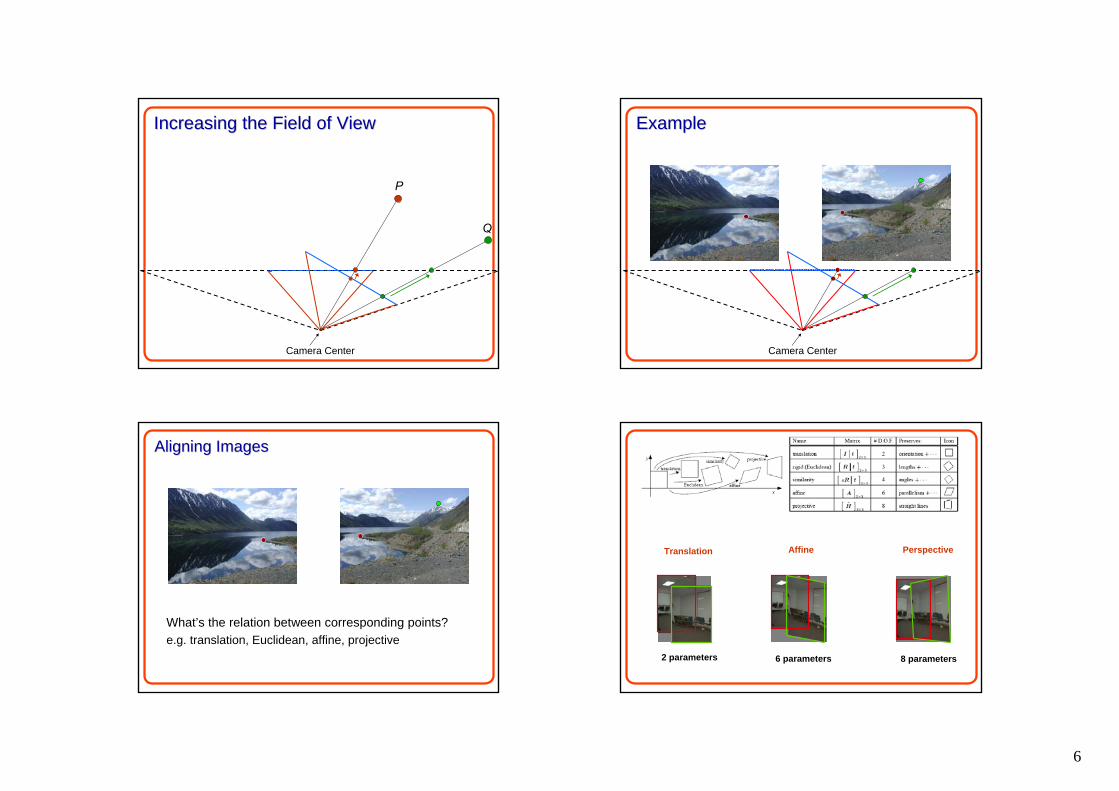
Increasing the Field of ViewIncreasing the Field of View
Camera Center
P
Q
ExampleExample
Camera Center
Aligning ImagesAligning Images
How can we find the homographies required for stitching ?
• From calibration parameters– Works, but these aren’t always known
What’s the relation between corresponding points?e.g. translation, Euclidean, affine, projective
Translation
2 parameters
Affine
6 parameters
Perspective
8 parameters

7
Trial Trial -- aligning images by translationaligning images by translation
Translations are not enough to align the images
left on top right on top
TT ZfYZfXZYX )/,/(),,( a
⎟⎟⎟⎟⎟
⎠
⎞
⎜⎜⎜⎜⎜
⎝
⎛
⎥⎥⎥
⎦
⎤
⎢⎢⎢
⎣
⎡=
⎟⎟⎟
⎠
⎞
⎜⎜⎜
⎝
⎛
⎟⎟⎟⎟⎟
⎠
⎞
⎜⎜⎜⎜⎜
⎝
⎛
10100
1ZYX
ff
ZfYfX
ZYX
a
Linear projection in homogeneous coordinates!
Pinhole camera model Pinhole camera model -- Perspective ProjectionPerspective Projection
(X,Y,Z)
Tyx
T )oZ/fY,oZ/fX()Z,Y,X( ++a
principal pointTyx )o,o(
⎟⎟⎟
⎠
⎞
⎜⎜⎜
⎝
⎛
⎥⎥⎦
⎤
⎢⎢⎣
⎡=
⎟⎟⎠
⎞⎜⎜⎝
⎛++
⎟⎟⎟
⎠
⎞
⎜⎜⎜
⎝
⎛
1ZYX
010of0of
ZZofYZofX
1ZYX
y
x
xx
a
Pinhole point offsetPinhole point offset
x
(ox,oy)y
Pinhole camera model Pinhole camera model -- Perspective ProjectionPerspective Projection
Camera Center (0,0,0)
Perspective warps (Homographies)Perspective warps (Perspective warps (HomographiesHomographies))
p1
p1 ≈ K P
P (X, Y, Z)
(x, y)
⎥⎥⎥
⎦
⎤
⎢⎢⎢
⎣
⎡
⎥⎥⎥
⎦
⎤
⎢⎢⎢
⎣
⎡≈⎥⎥⎥
⎦
⎤
⎢⎢⎢
⎣
⎡
+=
+=
ZYX
ofof
yx
oZfYy
oZfXx
y
x
y
x
1000
0
1

8
Camera Center (0,0,0)
P
p1
p2
p1 ≈ K Pp2 ≈ K R P
(X, Y, Z)
(x’, y’)
Perspective warps (Homographies)Perspective warps (Perspective warps (HomographiesHomographies))
Camera Center (0,0,0)
P
p1
p2
3x3 Homography
K-1 p1 ≈ P
p2 ≈ K R K-1 p1
Perspective warps (Homographies)Perspective warps (Perspective warps (HomographiesHomographies))
p1 ≈ K Pp2 ≈ K R P
3x3 Homography
p1` ≈ H p1
Calculate HomographyCalculate Calculate HomographyHomography
Given corresponding points in 2 images:
pi p`i
Find H satisfying
Requires 4 matching points.(8 unknowns since H up to Scale)
HomographyHomography
• Projective – mapping between any two projection planes (PPs) with the same center of projection
– rectangle should map to arbitrary quadrilateral – parallelism is not preserved – straight lines are preserved
• Called Homography PP2
PP1⎥⎥⎦
⎤
⎢⎢⎣
⎡
⎥⎥⎦
⎤
⎢⎢⎣
⎡=
⎥⎥⎦
⎤
⎢⎢⎣
⎡
1yx
*********
wwy'wx'
H pp’
p
p’

9
Camera Center
P
p1
p2 ≈ K (R P+T)p1 ≈ K P
Changing Camera CenterChanging Camera CenterWhat about mapping between 2 general images
(NOT from rotating camera)?
p2NOT Homography
p2 p1
Changing camera centerChanging camera center
PP1
PP2
HomographyHomographyHowever: Mapping between any two arbitrary PPs IS possible
if the object is planar.
PP2PP1
⎥⎥⎦
⎤
⎢⎢⎣
⎡
⎥⎥⎦
⎤
⎢⎢⎣
⎡=
⎥⎥⎦
⎤
⎢⎢⎣
⎡
1yx
*********
wwy'wx'
H pp’
p
p’
homography- K1K2-1
3x3 Homography
HomographyHomography -- planar sceneplanar scene
PP1
PP2
Object Planehomography- K1
homography- K2
p2 ≈ K2 Pp1 ≈ K1 P
p1 ≈ K1 K2-1p2
P
p1
p2

10
Julian Julian BeeverBeever: Manual : Manual HomographiesHomographies
http://users.skynet.be/J.Beever/pave.htm
EpipolarEpipolar GeometryGeometry
PP2PP1
[ ]⎥⎥⎥
⎦
⎤
⎢⎢⎢
⎣
⎡
⎥⎥⎥
⎦
⎤
⎢⎢⎢
⎣
⎡=
1yx
*********
yx 1''0
Fundamental Matrix
p
For non planar scene, there is no Homography between two generalviews , however there is a geometric constraint:The Epipolar Constraint between any two arbitrary PPs
EpipolarEpipolar GeometryGeometry Image warping with Image warping with homographieshomographies
image plane in front image plane belowblack areawhere no pixelmaps to
11
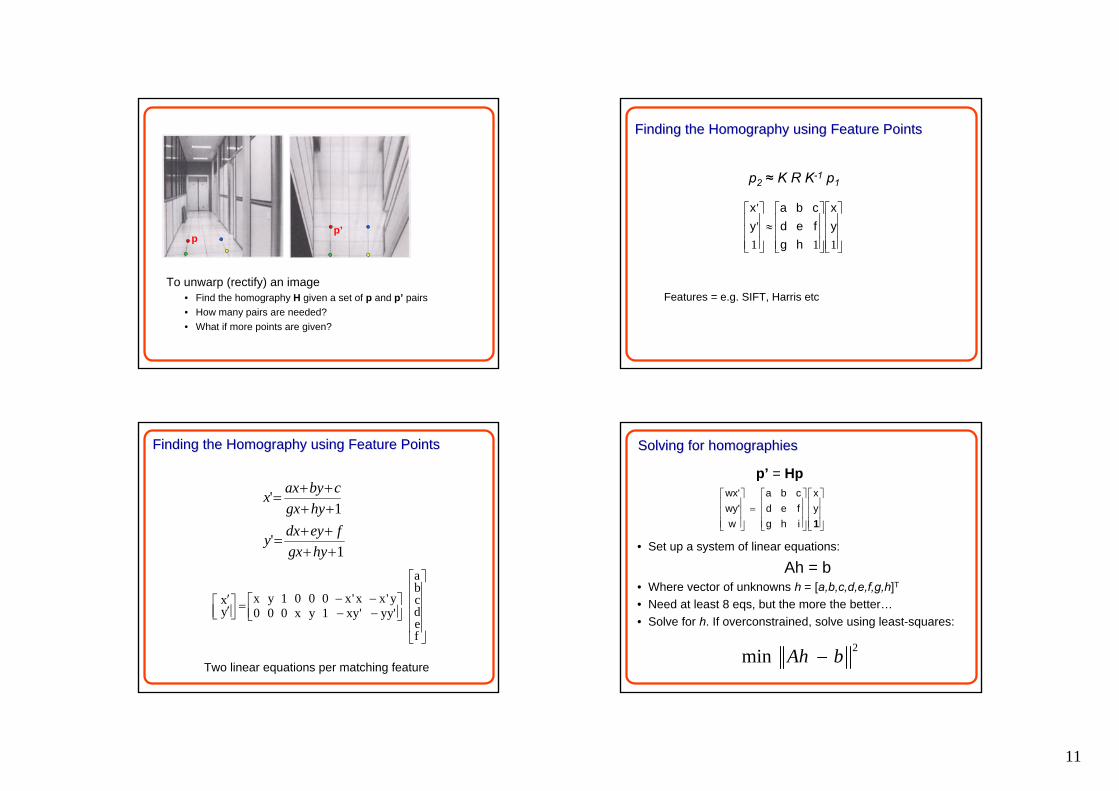
To unwarp (rectify) an image• Find the homography H given a set of p and p’ pairs• How many pairs are needed?• What if more points are given?
pp’
Finding the Finding the HomographyHomography using Feature Pointsusing Feature Points
p2 ≈ K R K-1 p1
⎥⎥⎥
⎦
⎤
⎢⎢⎢
⎣
⎡
⎥⎥⎥
⎦
⎤
⎢⎢⎢
⎣
⎡≈
⎥⎥⎥
⎦
⎤
⎢⎢⎢
⎣
⎡
111''
yx
hgfedcba
yx
Features = e.g. SIFT, Harris etc
1'
1'
++++
=
++++
=
hygxfeydxy
hygxcbyaxx
Two linear equations per matching feature
⎥⎥⎥⎥
⎦
⎤
⎢⎢⎢⎢
⎣
⎡
⎥⎦⎤
⎢⎣⎡
−−−−=⎥⎦
⎤⎢⎣⎡
′′
fedcba
'yy'xy1yx000y'xx'x0001yx
yx
Finding the Finding the HomographyHomography using Feature Pointsusing Feature Points Solving for Solving for homographieshomographies
• Set up a system of linear equations:
Ah = b• Where vector of unknowns h = [a,b,c,d,e,f,g,h]T
• Need at least 8 eqs, but the more the better…• Solve for h. If overconstrained, solve using least-squares:
⎥⎥⎥
⎦
⎤
⎢⎢⎢
⎣
⎡
⎥⎥⎥
⎦
⎤
⎢⎢⎢
⎣
⎡=
⎥⎥⎥
⎦
⎤
⎢⎢⎢
⎣
⎡
1yx
ihgfedcba
wwy'wx'
p’ = Hp
2min bAh −

12
Feature Matching PanoramaFeature Matching Panorama
• Reference image is marked red.• For each blue image the homography was calculated
using matched features.
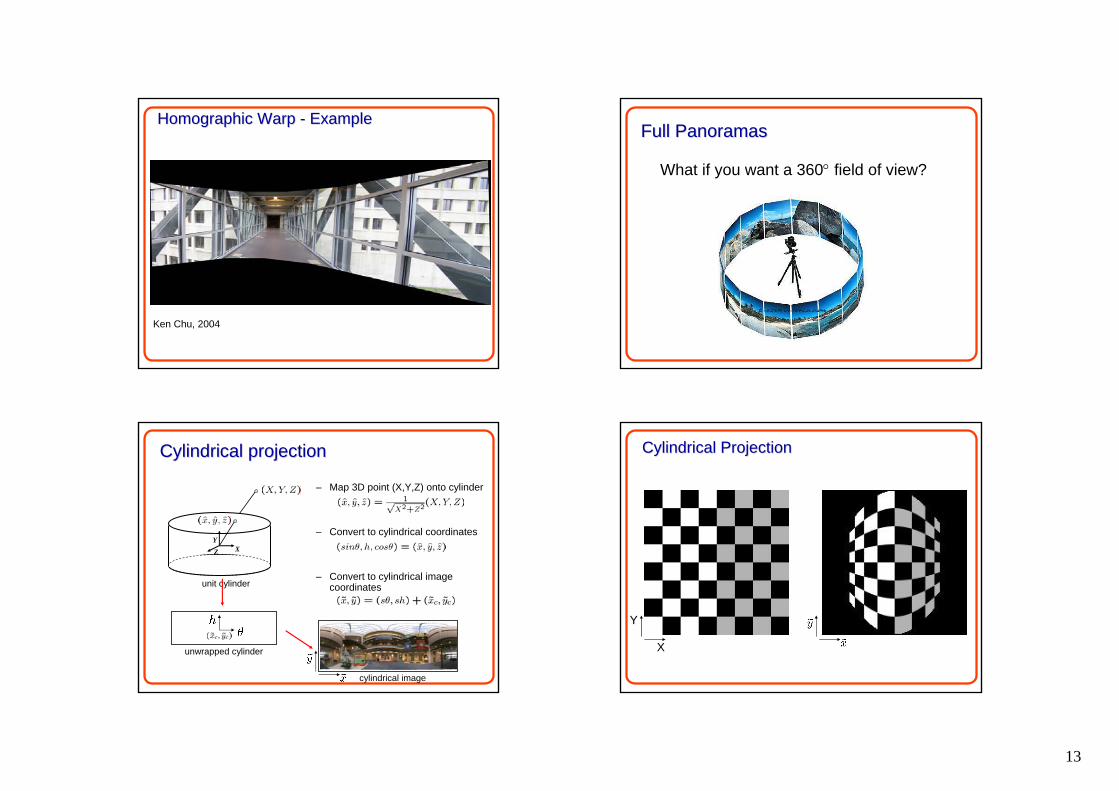
Homographic Warp Homographic Warp -- ExampleExample
Homographic Warp Homographic Warp -- RevisitedRevisited
Panorama
SceneHomographic Warp Homographic Warp -- ExampleExample
13
Homographic Warp Homographic Warp -- ExampleExample
Ken Chu, 2004
Full PanoramasFull Panoramas
What if you want a 360° field of view?
– Map 3D point (X,Y,Z) onto cylinder
Cylindrical projectionCylindrical projection
XY
Z
unit cylinder
unwrapped cylinder
– Convert to cylindrical coordinates
cylindrical image
– Convert to cylindrical image coordinates
Cylindrical ProjectionCylindrical Projection
Y
X
14
In the cylindrical coordinates rotational warping is translated into translational warping.
Assembling the panoramaAssembling the panorama
• Stitch pairs together, blend, then crop
EndEnd--toto--end alignment and cropend alignment and crop
NOTE: straight lines become conics.
360360°° PanoramaPanorama

15
Inverse Cylindrical ProjectionInverse Cylindrical Projection
X
YZ
(X,Y,Z)
(sinθ,h,cosθ)
x
z
θ( )( )
hyzxfx
zx
syyhsxx
C
C
====
−=−=
ˆˆcosˆsinˆ
~~~~
θθ
θf
x
z
x
QuicktimeQuicktime VRVR
Panoramas: http://www.apple.com/quicktime/technologies/qtvr/gallery/times_square.htmlhttp://www.panoramas.dk/fullscreen5/f45-everest-mars.htmlhttp://www.panoramas.dk
Demo
TimesSquare-Med.mov
MultiMulti--Perspective PanoramaPerspective Panorama
Suppose we do not want a 360° view. We want a view of a “whole street” or even more complicated - a route alongcity streets.
Using homography to align all images,(i.e. creating a single wide angle view)farthest objects will be distorted tovery large regions.
Thus need to simulate a different camera model
PushbroomPushbroom Camera ModelCamera Model

16
The generalized camera model:
X direction - parallel projectionY direction - perspective projection
x
y
from: http://www.wisdom.weizmann.ac.il/~deniss/2002-05_stereo_generalized_cameras/stereo_with_generalized_cameras.ppt
PushbroomPushbroom Camera ModelCamera Model Pushbroom Panorama - Example
The Stanford CityBlock Project: http://graphics.stanford.edu/projects/cityblock/
PushbroomPushbroom Camera ModelCamera Modelt t+1 t+2
PushbroomPushbroom Camera ModelCamera Model
Implementation through cuts of 3D video array.
• Take images while moving a usual camera
• Stack them into 3D array
• Take a cut along the “time” dimension
t

17
Pushbroom Panorama - Example
Gooseneck State Park, Utah
t
u
kk+1
u
t
Stationary Camera Panning Camera
kk+1
Space-Time Volume Slicing - - Video MosaicAlign the frames of the Space-Time Volume
From: Rav-Acha and Peleg
Space-Time Volume Slicing - Panorama
t
x
Panorama (still)
From: Rav-Acha and Peleg
Space-Time Volume Slicing - Dynamosaicing
t
x
Forward Panning camera
From: Rav-Acha and Peleg

18
Original - Panning
Space-Time Volume Slicing - Dynamosaicing
From: Rav-Acha and Peleg
Iguazu Falls
Space-Time Volume Slicing - Dynamosaicing
t
x
Backward Panning camera
From: Rav-Acha and Peleg
Backward - Panning
Space-Time Volume Slicing - Dynamosaicing
From: Rav-Acha and Peleg
Space-Time Volume Slicing - Dynamosaicing
t
x
backward panning forward motion
From: Rav-Acha and Peleg

19
Backward Panning - forward motion
From: Rav-Acha and Peleg
Space-Time Volume Slicing - Dynamosaicing Space-Time Volume Slicing - Video Panorama
t
x
video panorama
From: Rav-Acha and Peleg
Backward Panning - forward motion PANORAMA
From: Rav-Acha and Peleg
Space-Time Volume Slicing - Dynamosaicing Another example

20
Space-Time Volume Slicing- Evolving Time Fronts
Still CameraMoving objects
t
kk+1
From: Rav-Acha and Peleg
Space-Time Volume Slicing- Evolving Time Fronts u
t
u
t
xMapping each TF to a new frame
Space-Time Volume Slicing- Evolving Time Fronts
From: Rav-Acha and Peleg
Space-Time Volume Slicing- Evolving Time Fronts
From: Rav-Acha and Peleg
21
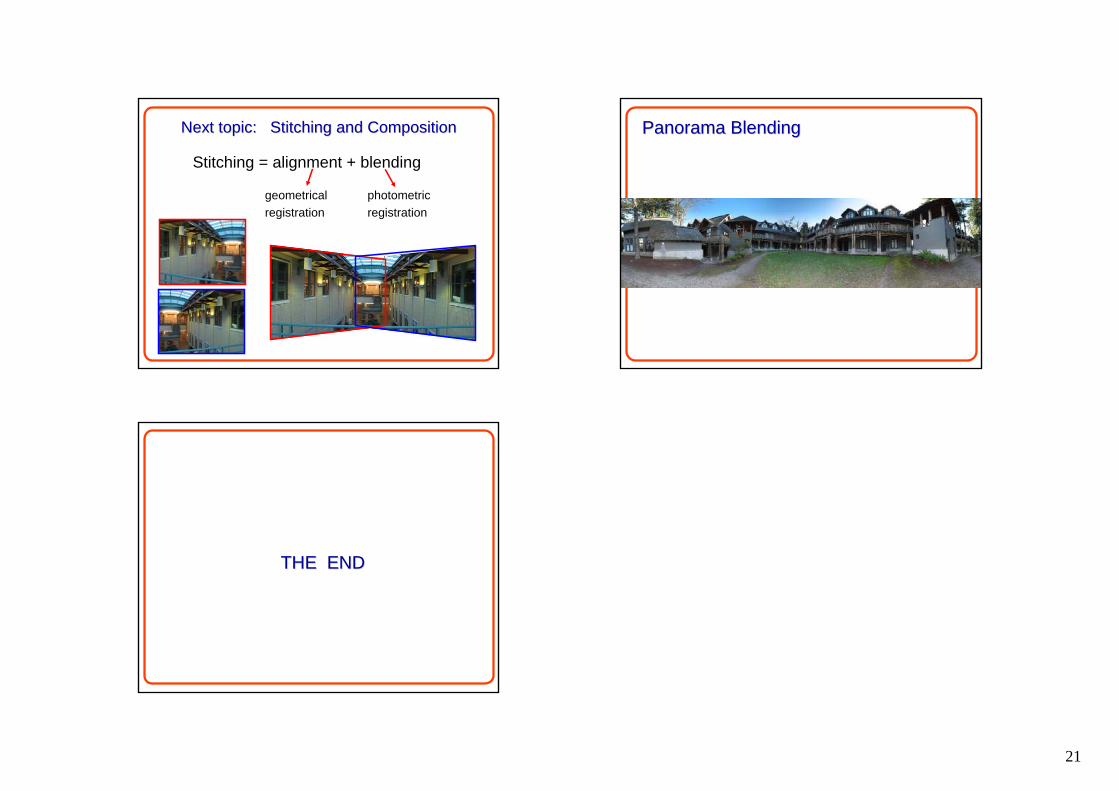
Next topic: Stitching and CompositionNext topic: Stitching and Composition
Stitching = alignment + blending
geometricalregistration
photometricregistration
Panorama BlendingPanorama Blending
THE ENDTHE END