buddyberry: kiteducativocomrobômóvelpara...
TRANSCRIPT

Universidade Tecnológica Federal do Paraná – UTFPR
Departamento Acadêmico de Eletrônica – DAELN
Departamento Acadêmico de Informática – DAINF
Engenharia de ComputaçãoOficina de Integração 3 (IF66J) – S71 – 2016/2
Relatório TécnicoBuddy Berry: kit educativo com robô móvel para
o ensino de lógica para crianças
André A. Kaviatkovski – [email protected]
Daniel A. de Freitas – [email protected]
Juliane T. Guedes – [email protected]
Novembro de 2016
Resumo
O projeto Buddy Berry consiste em um kit educativo para o ensino de ló-gica de programação com uso de um robô controlado através de uma in-terface baseada em um tabuleiro e blocos de encaixar. A motivação para odesenvolvimento do projeto está no fato de existir pouca disponibilidadede recursos deste tipo, mesmo sendo o ensino de lógica de programaçãopara crianças um tópico importante. O kit educativo Buddy Berry, inspi-rado no Cubetto da Primo Toys, tem como objetivo ser uma dessas ferra-mentas, uma vez que cria um jogo em que a criança possa aprender inte-ragindo manualmente com o brinquedo. Apesar de apresentar um custosignificativo, o kit Buddy Berry é economicamente viável, especialmentese comparado com o kit de robótica da Lego. O kit contém o robô, o tabu-leiro, blocos de comando e mapa de histórias - que é em formato digital - eao utilizá-lo a criança poderá compreender conceitos abstratos de progra-mação como o que é uma instrução ou uma função, além de aprender ou-tros conceitos, como os de direita e esquerda, entre outros. Um dos obje-tivos propostos é possibilitar que outras pessoas possam recriar o projeto.Assim, aqui disponibilizamos ou indicamos onde encontrar os esquemáti-cos de circuitaria, de impressão de carcaça, os códigos para controle, entreoutras partes necessárias para a criação do Buddy Berry.
1 Introdução
Os brasileiros gastam aproximadamente cinco horas por dia na internet (Pes-quisa de Mídia Brasileira, Secom - 2015)[1], contudo pouco se é ensinado àscrianças sobre como é criada essa tecnologia digital. Neste contexto, foi desen-volvido neste trabalho o robô Buddy Berry[2] é uma ferramenta para o ensinode lógica de programação para crianças entre quatro e oito anos de idade.
Apesar da importância da programação, , ela não encontra-se inserida noscurrículos escolares do ensino fundamental. Contudo, existem ferramentas que
1

Relatório Técnico: Buddy Berry 2
introduzem o tema para crianças. Assim, o Buddy Berry, inspirado pelo Cubettoda Primo Toys[3], foi desenvolvido para proporcionar o primeiro contato dascrianças com os códigos de programação de computadores, com o uso de ferra-mentas lúdicas [4][5].
O kit Buddy Berry é composto pelos seguintes elementos: o Robô, o Tabu-leiro, os blocos de comando, livro de história e o mapa de história. A Figura 1mostra uma visão geral do projeto e como as partes interligam-se.
Figura 1: Diagrama com a visão geral do projeto.
A ideia do kit é de que um adulto, ao ler a história para a criança, criará umobjetivo ao jogo. Com o objetivo da história em mente, a criança terá que criaruma sequência de comandos que levarão o robô de um quadrante do mapa dehistórias a outro. O mapa de histórias é uma lona impressa que mostra umamatriz 5x5. Cada quadrado da matriz (quadrante) possui um desenho represen-tando um objetivo. Assim, para mover o robô, é necessário utilizar os blocos de

Relatório Técnico: Buddy Berry 3
comando e o tabuleiro.O tabuleiro é utilizado como interface do jogo e, consequentemente, dispensa-
se o uso de uma tela, proporcionando uma maior interatividade manual com acriança. O tabuleiro tem 16 casas/buracos para encaixe dos blocos de coman-dos. As 12 primeiras casas servem como linha de comando e os quatro últimoscompõem um espaço reservado para função. A função é acionada pela criançaao utilizar o bloco de função na linha de comando. Após encaixar as peças, orobô somente executa os comandos se acionar o botão de executar. O botão deexecutar, que fica após a última casa da linha de comando, serve para acionar oenvio dos comandos para o robô ou para parar o mesmo se estiver em execução.
No jogo existem quatro diferentes tipos de peças, sendo elas: frente, direita,esquerda e função. De forma a se distinguir uma peça da outra, uma vez que to-das tem o mesmo formato, foi utilizado um sistema de divisor de tensão em cadaum espaços para encaixe, assim, quando uma peça é colocada deve-se medir atensão naquela entrada de forma a se identificar qual dos blocos foi encaixado.No tabuleiro tem um LED abaixo de cada passo para ser possível identificar quea peça foi encaixada corretamente e para posteriormente mostrar qual é o passoem execução.
Para o controle do tabuleiro utiliza-se um Arduino MEGA. Este modelo pos-sui mais entradas digitais do que o modelo UNO, permitindo a leitura dos sinaisde todas as posições do tabuleiro. No robô utiliza-se um Arduino UNO, pois ochassi adotado para o robô é pré-fabricado para o encaixe deste modelo.
A seguir são apresentados os requisitos funcionais e não funcionais do pro-jeto.
Requisitos Funcionais:1. O si stema deverá ler cada nó utilizado na estação base.2. O si stema deverá enviar todos os nós utilizados para o robô após acio-
nado o botão de executar.3. O botão de executar deverá possibilitar a parada do robô em movimento
se acionado.4. O r obô deverá receber todos os nós enviados pela base.5. O r obô deverá executar todos os passos feitos na linha de execução.6. O r obô deverá voltar ao ponto de partida quando o botão interromper for
pressionado.7. A base deverá acender o LED correspondente ao passo sendo feito pelo
robô.8. A base deverá avisar o usuário piscando todos os LEDs quando o usuário
pular um nó na linha de comando.
Requisitos Não Funcionais:1. A base e o r obô deverão ter seu componentes internos (circuito) oculta-
dos por uma carcaça de madeira.

Relatório Técnico: Buddy Berry 4
2. A car caça deverá ser de madeira MDF 2 mm e 5 mm cortadas a laser.3. A car caça deverá ser com uma interface chamativa para crianças de 4 a 8
anos.4. O si stema e o robô deverão utilizar Zigbee como comunicação sem fio.5. Os bl ocos deverão ser de fácil encaixe e manuseio.6. As peças deverão ser diferenciadas usando uma diferença de tensão para
cada tipo de peça de comando.7. O mapa de hi stór i a deverá ser atrativo para crianças e de fácil compre-
ensão.8. O mapa de hi stór i a deverá ser feito de um material rígido para melhor
encaixe e para deslocamento do robô.9. A hi stór i a deverá ser simples para facilitar o entendimento para crian-
ças.
2 Elementos do Projeto
2.1 Tabuleiro
O tabuleiro é o controlador principal do projeto e, como já mencionado ante-riormente, consiste em uma carcaça de madeira com 16 casas desenhadas – 12casas de linha de comando e quatro casas para função – e um botão switch paraacionar o envio dos comandos e parar o robô se esse estiver executando, comomostrado na Figura 2. Apesar do exterior do projeto ser simples internamentesuas conexões são complexas e envolvem uma série de componentes eletrôni-cos e ligações que permitem a identificação da peça ao entrar em contato coma trilha da casa e seu LED respectivo, além do botão. A Figura 3 mostra como éfeito esse circuito interno.
Figura 2: Figura ilustrativa do tabuleiro base.
Na figura podemos ver que cada casa tem sua própria trilha que é compostapor duas linhas. A linha inferior é ligada à massa e a superior aos 5 Volts do Ar-duino, sendo que também existe um resistor de 10k ohms, que servirá para fazerum divisor de tensão com a peça que vier a ser encaixada ali. No meio da trilha

Relatório Técnico: Buddy Berry 5
Figura 3: Figura ilustrativa do circuito do tabuleiro base.
tem um imã que permite o fácil encaixe das peças e abaixo da trilha se localizao LED. Cada LED é conectado à uma saída do arduino e também a massa, pas-sando por uma resistência de 220 ohms para controlar a corrente. No tabuleirotambém existe o botão acionador, sendo esse um botão switch comum. Ele éligado de forma que o botão fica em nível lógico baixo e, quanto pressionado,ele vai para nível lógico alto.
No tabuleiro ocorre todo o processamento central do projeto e este é reali-zado por um Arduino Mega. Nesse Arduino temos 16 entradas analógicas quesão utilizadas para identificação e leitura da tensão de cada casa, assim comosão usadas mais entradas do que as disponíveis em um Arduino UNO, é justifi-cado o uso do Arduino Mega. Neste modelo de Arduino também são utilizadas17 entradas digitais, sendo que 16 destas são utilizadas para o controle dos LEDe uma para a leitura do botão switch. Como nossa comunicação será feita atra-vés do XBee, ao Arduino é encaixado um shield que usa as entradas TX e RX queservem para a comunicação.
Para poder receber os dados do usuário é necessário a entrada por meiodeste de suas escolhas, neste sentido foram desenvolvidos 4 tipos de blocos,sendo que cada um destes representa uma ação específica: frente, direita, es-querda e função; cada um com uma cor, formato e resistor diferente para sua re-presentação. As cores e resistores são, respectivamente, vermelho e 100K ohms,amarelo e 220 ohms, azul e 10K ohms e verde e 4,7K ohms. Deste modo, as pe-ças podem ser identificas ao serem encaixadas na trilha do tabuleiro e para devehaver o contato entre o resistor da peça e as trilhas. Assim em cada peça pode sever externamente dois contatos de cobre que no seu interior terá o resistor sol-

Relatório Técnico: Buddy Berry 6
dado entre estes, ainda no interior desta existe um imã similar ao do tabuleiro,de forma a criar atração entre a peça e o tabuleiro e fixar estas.
A figura 4 ilustra como são os blocos e a figura 5 mostra como é feita a monta-gem dos mesmos. Para mais informações de montagem do bloco e do tabuleirotem no site do Buddy Berry1.
Figura 4: Ilustração dos blocos de comando.
Figura 5: Montagem dos blocos de comando.
2.2 Robô
Muito embora o tabuleiro faça o processamento central do projeto, sem o robônão haveria sentido no presente projeto. O nosso robô, apelidado de BuddyBerry, é constituído de dois motores DC com suas rodas encaixadas, chassi de
1mybuddyberry.wordpress.com/2016/11/09/atividades-adiantadas-0911/

Relatório Técnico: Buddy Berry 7
acrílico redondo compatível com Arduino, uma roda boba para estabilidade,uma ponte H para controle dos motores, dois encoders e seus sensores, alimen-tação por quatro pilhas AA, o Arduino, XBee e a carcaça de madeira, representa-dos na Figura 7.
Figura 6: Ilustração dos componentes do robô
Figura 7: Figura ilustrativa do circuito do robô

Relatório Técnico: Buddy Berry 8
Como o robô segue a movimentação colocada no tabuleiro pela criança,seus movimentos devem ser precisos. Assim, precisa se de que o robô ande umamesma distância toda vez que a peça frente seja usada e que gire aproximada-mente 90 graus toda vez que se utilizada as peças de direita e esquerda. Parapossibilitar todos esses movimentos, o robô[6] usa sinais PWM para controlaros motores por meio da ponte H e os encoders com sensores para controlar omovimento e possibilitar movimentos precisos.
No projeto utiliza-se uma ponte H L298n[7] para alimentar e controlar osdois motores DC. A Figura 8 mostra o L298n.
Figura 8: Ilustração da ponte H L298n utilizada no projeto.
Também utiliza um encoder[8] com 40 divisões e sensores para leitura emcada um dos motores, pois esses não respondem de forma igual ao mesmo si-nal. Desta maneira, é necessário a implementação de um sistema de controleque determina a velocidade da roda direita e ajusta com base no movimentodesta a velocidade de rotação da roda esquerda. Dessa maneira, o encoder comsensor é utilizado como ferramenta para gerar um retorno ao controlador pro-porcional integral derivativo (PID)[9]. A ideia básica de um PID é ler um sensor,calcular a resposta de saída do atuador (motor) através do cálculo proporcional,integral e derivativo que analisa os erros e então somar etes três componentespara calcular a saída corrigida para o atuador.
Para que o robô funcione utiliza-se um microcontrolador Arduino UNO[10].No Arduino são utilizadas suas saídas PWM para controle dos motores, além dasentradas TX e RX para o XBee.
No kit teremos ainda, em conjunto com os elementos apresentados anteri-ormente, um mapa de histórias em que o robô andará por cima quando a cri-ança brincar utilizando a história que será fornecida em formato digital 2. Omapa é composto por uma grade cinco por cinco com figuras de pontos tu-
2https://drive.google.com/open?id=0B2guiBf5tQnnUkFZUDIwcWktWDQ

Relatório Técnico: Buddy Berry 9
Figura 9: Ilustração do Mapa de Histórias do Buddy Berry.
rísticos curitibanos que servem de objetivos para o jogo, já que na história asinstruções levam a criança a movimentar o robô de um local para outro.
2.3 Comunicação
A comunicação entre o tabuleiro e o robô é feita por meio de comunicação semfio e após pesquisas de tecnologias disponíveis (Bluetooth, WiFi e ZigBee) foiverificado que a melhor opção para o este trabalho seria o protocolo de comu-nicação ZigBee [11], pois este tem como principais características o seu desen-volvimento voltado para a utilização em sistemas embarcados, além de ter baixoconsumo de energia.
Para viabilizar a utilização deste protocolo são utilizados dois módulos XBeesZigBee (S2C) compatíveis com os Arduinos UNO e MEGA utilizados. É impor-tante destacar que o protocolo ZigBee se utiliza de transmissões RF (Rádio Frequên-cia) para suas operações, o que permite um bom alcance e funcionamento, sendoseu uso amplamente difundido na robôtica.
Para utilizar o XBee no Arduino e estabelecer a comunicação entre eles, nomodo de comunicação utilizado no projeto que possibilita a comunicação ex-clusiva entre dois dispositivos, é necessário informar a cada um destes o ende-reço MAC do outro, bem como informar um nome de rede comum de forma queos dispositivos possam se localizar e se comunicar sem maiores dificuldades. 3.Uma rede Xbee com módulos deve ter pelo menos um dos seus módulos confi-gurado como coordenador. Esse modulo que inicia a rede e se comunica com ooutro módulo, que funciona em modo roteador (Router), que por sua pode co-municar com os outros dispositivos chamados End Devices (dispositivos finais).
3Neste sentido, maiores informações podem ser obtidas em:http://blog.filipeflop.com/wireless/tutorial-wireless-arduino-xbee-shield.html

Relatório Técnico: Buddy Berry 10
No site do Buddy Berry 4 tem explicado como realiza a configuração e teste dacomunicação.
3 Integração dos Componentes
Uma vez apresentados individualmente os elementos que compõem o projeto,deve-se, então, demonstrar como a integração entre as partes foi realizada. Aintegração tem tem por objetivo unificar as partes e possibilitar a conclusão dotrabalho. Neste sentido, a apresentação desta seção foi elaborada da seguinteforma: primeiramente são apresentados os fluxogramas do funcionamento decada um dos componentes - robô e tabuleiro - e, em seguida, é apresentadoum diagrama de interação demonstrando como funciona a troca de mensagensentre esses componentes.
Assim, iniciamos a sua integração apresentado o fluxograma de funciona-mento do Robô.
Do fluxograma da Figura 10, podemos observar que o Robô tem apenas afunção de aguardar os comandos gerados no tabuleiro, executando-os oportu-namente. Sua rotina é bastante simples, embora sua implementação não o seja,haja vista a necessidade de implementação, dentro deste, do controlador PID.Neste sentido, é oportuno destacar aqui que o grupo se utilizou da biblioteca"Arduino PID Library"5, e realizou a montagem da seguinte forma: a roda direitafoi designada como mestre (é ela que determina a velocidade de movimento) ea roda esquerda como servo (tenta alcançar a roda direita). Deste modo as ro-das tendem a compensar seus movimentos rotacionais e a permitir que o Robôdesloque-se em linhas retas, tendo um movimento mais controlado6.
Destaca-se no entanto que, embora o controlador PID esteja implementado,este ainda necessita de ajustes em seus ganhos (Kp, Kd e Ki), de modo a aper-feiçoar o movimento do Robô. O fato de os movimentos de avanço e de girodo Robô não serem exatamente precisos deve-se à dificuldade de encontrar-se,empiricamente, valores adequados de ganho.
Uma vez apresentado o fluxograma do Robô, passa-se agora ao do tabuleiro.A partir da Figura 11 podemos observar que todas as decisões são realizadas
pelo Tabuleiro. Este deve ler as peças inseridas, controlar os LEDs, acompanharo envio dos comandos para o Robô, monitorar o momento em que este com-pleta o movimento, e gerar a rota tanto na ida quanto na volta.
4https://mybuddyberry.wordpress.com/2016/10/19/testes-utilizando-a-tecnologia-zigbee/
5http://playground.arduino.cc/Code/PIDLibrary6Com relação ao tema PID, caso seja do interesse do leitor conhecer mais sobre
este tipo de controlador e entender toda a matemática por trás da biblioteca, o desen-volvedor da mesma disponibiliza em seu site uma explicação detalhada da matemáticae do código desenvolvido http://brettbeauregard.com/blog/2011/04/improving-the-beginners-pid-introduction/

Relatório Técnico: Buddy Berry 11
Figura 10: Fluxograma de Funcionamento do Robô.
Desta forma verifica-se que todo o processamento de fato, importante paraeste projeto, ocorre no Tabuleiro. Uma vez que este faz todas as tomadas de deci-sões e controla o Robô, é considerado o núcleo do projeto e foi o componeneteque demandou mais testes diversos, haja vista o número elevado de conexõesentre a superfície do Tabuleiro e o Arduino.
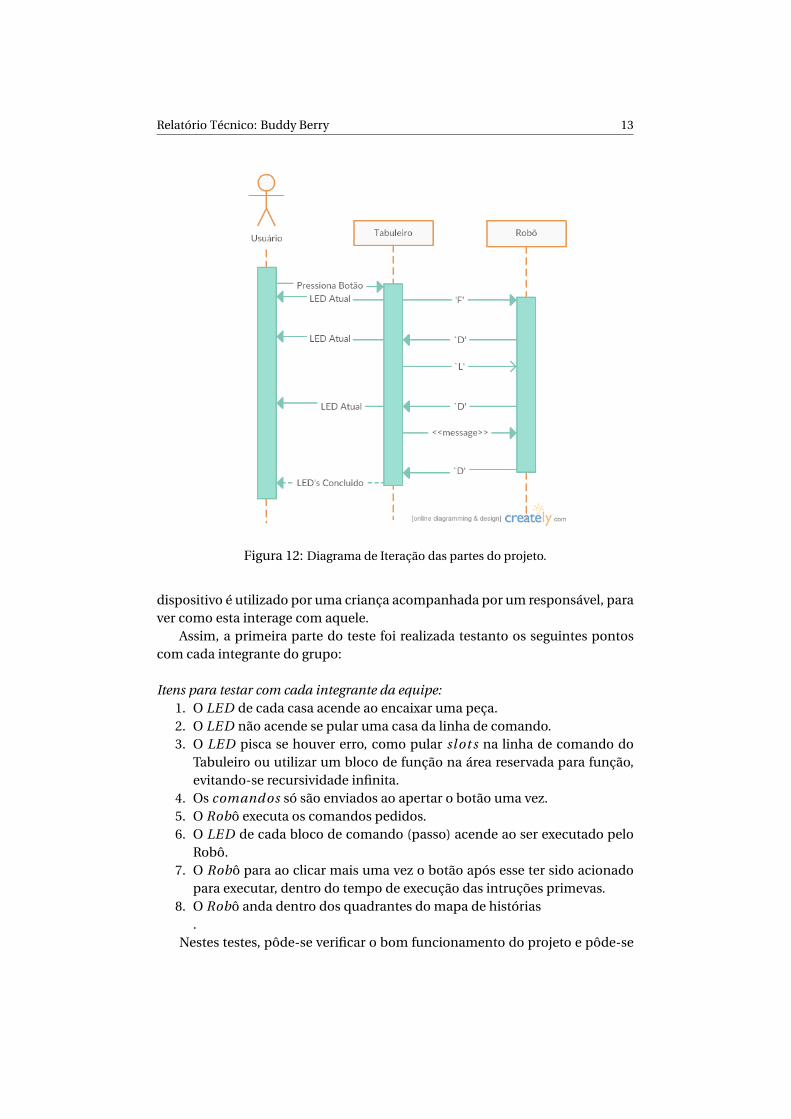
Por fim, apresentamos um simples diagrama de Interação, também conhe-cido por Diagrama de Sequência, demonstrando as mensagens trocadas entreTabuleiro e Robô na execução de uma rotina simples (frente, esquerda, instru-ção qualquer) - Figura 12.
A imagem permite verificar que o sistema troca poucas mensagens, umapara cada comando apenas, e que existe uma só mensagem, de controle, forne-

Relatório Técnico: Buddy Berry 12
Figura 11: Fluxograma de Funcionamento do Tabuleiro.
cida pelo Robô ao Tabuleiro - quando aquele completa a execução da instrução.Ao mesmo tempo, pode-se observar que o usuário sempre obtém informaçãode retorno do sistema, o qual mostra qual ação está sendo executada, de modoque aquele possa sempre identificar o que está acontecendo.
Destaca-se que o padrão de comunicação adotado nas transmissões foi ’R’para virar à direita, ’L’ para virar à esquerda e ’F’ para frente, sendo que a res-posta de conclusão de ação do Robô é sempre ’D’. Este padrão foi adotado deforma arbitrária e poderiam ser escolhidas outras letras. No entanto, este pa-drão mostrou-se vantajosamente intuitivo.
4 Resultados
O presente projeto foi planejado para ser testado em duas etapas: a primeira aser realizada com cada integrante do grupo e a segunda sendo o teste no qual o
Relatório Técnico: Buddy Berry 13
Figura 12: Diagrama de Iteração das partes do projeto.
dispositivo é utilizado por uma criança acompanhada por um responsável, paraver como esta interage com aquele.
Assim, a primeira parte do teste foi realizada testanto os seguintes pontoscom cada integrante do grupo:
Itens para testar com cada integrante da equipe:1. O LED de cada casa acende ao encaixar uma peça.2. O LED não acende se pular uma casa da linha de comando.3. O LED pisca se houver erro, como pular sl ot s na linha de comando do
Tabuleiro ou utilizar um bloco de função na área reservada para função,evitando-se recursividade infinita.
4. Os comandos só são enviados ao apertar o botão uma vez.5. O Robô executa os comandos pedidos.6. O LED de cada bloco de comando (passo) acende ao ser executado pelo
Robô.7. O Robô para ao clicar mais uma vez o botão após esse ter sido acionado
para executar, dentro do tempo de execução das intruções primevas.8. O Robô anda dentro dos quadrantes do mapa de histórias
.Nestes testes, pôde-se verificar o bom funcionamento do projeto e pôde-se

Relatório Técnico: Buddy Berry 14
observar os seguintes itens:
Observações dos testes feitos por cada integrante da equipe:1. O Robô poderia ter passos mais definidos, pois às vezes desvia da rota
quando anda à frente.2. A bater i a do Robô poderia ter uma vida útil maior.3. O pr i mei r o passo da história poderia ser melhor pensado, pois usa um
quadrante de canto do mapa.4. O botão de executar do Tabuleiro poderia ter um LED para indicar a co-
municação entre Tabuleiro e Robô estabelecida.
Apesar das observações negativas nos testes, pode-se concluir que o projetofoi executado com êxito.
A segunda etapa de testes foi realizada com criança de 6 anos. Tendo emvista alguns problemas ocorridos nas semanas que precederam a entrega dopresente relatório - falhas de um sensor e dificuldades de calibração dos ganhosdo controlador PID -, esta etapa não foi deveras extensa, porém apresentou re-sultados preciosos. A criança em questão brincou com o Tabuleiro e o Robô,mas sem o mapa e sem o livro de histórias. O desafio proposto foi o de fazer oRobô chegar a uma cadeira a poucos metros de distância, a partir de orientaçõesde partida diversas. A criança teve o auxílio de sua mãe e de um dos integran-tes do grupo. O que observou-se foi que a criança pouco utilizou a função doTabuleiro, ou pouco pensou com esta opção. Só o fez quando induzida pelossupervisores do experimento. Também notou-se que houve uma desorientaçãoinicial com relação às direções direita e esquerda. Mas rapidamente a criançapassou a corrigir-se no uso das cores, falando para si mesma que determinadainstrução estava errada, fazendo afirmações como "É a direita ou a peça ama-rela"(amarela é a cor da peça à direita. Também observou-se que a princípio acriança recusava-se a pensar em um programa estruturado com várias instru-ções, preferindo enviar e reenviar uma única instrução várias vezes até que seuobjetivo fosse alcançado. Com as devidas orientações ela mudou sua atitude.Por fim, conseguiu fazer com que o Robô chega-se à cadeira após 4 tentativas.
Desta forma, todas as fases de testes são consideradas concluidas com êxito.
5 Conclusão e Trabalhos Futuros
O projeto Buddy Berry foi criado como ferramenta para o ensino de lógica deprogramação para crianças entre 4 e 8 anos de idade, e o decorrer do seu de-senvolvimento forneceu oportunidade de análise de seus êxitos, dificuldades epontos de melhoria.
Entre seus êxitos pôde-se ver que seu uso realmente ajuda crianças no apren-dizado de lógica de programação. É proporcionada ao usuário a experiência douso do bloco de função com maior frequência - a princípio para a simples re-

Relatório Técnico: Buddy Berry 15
petição de instruções e, em seguida, para um melhor aproveitamento da linhade comando quando da necessidade de mais espaço de programação. O projetotambém conseguiu alcançar o intento de ensinar conceitos abstratos como es-querda e direita, através do uso de cores diferentes para a identificação de cadabloco. Isso ocorreu mesmo quando o usuário mudava de sentido ao ver o Robôem determinada orientação, ou seja, além da direita e esquerda ele começou acompreender as diferenças espaciais quando da mudança de sua posição.
No desenvolvimento do projeto, houveram algumas dificuldades. Uma de-las foi conseguir controlar o movimento do Robô, pois mesmo com a utiliza-ção de um controlador PID o robô não alcançou um andar à frente totalmenteretilíneo e suas curvas à direita e à esquerda não apresentaram-se totalmenteajustadas. Acredita-se que uma melhor escolha de coeficientes de ganhos parao controlador permita que este problema seja contornado. Outra observaçãofoi a dificuldade em conseguir ler alguns blocos colocados no Tabuleiro. Notou-se que quanto mais blocos colocados no tabuleiro, maior o intervalo da leiturado valor de resistência da peça necessário para sua identificação por parte doTabuleiro.
Apesar desses detalhes, conclui-se que o trabalho teve êxito em sua execu-ção. Não pode-se, contudo, deixar de pontuar certas melhorias para trabalhosfuturos. Um ponto a melhorar é a colocação de um LED ligado ao botão de exe-cução e parada do tabuleiro, para indicar a comunicação. Assim seria mais fácile direto saber se a sequência de comandos foi enviada, está sendo executadaou foi interrompida a pedido da criança. Outro ponto que pode ser melhoradoé a redução do excesso de fios utilizados no tabuleiro, pois sempre há o perigode um fio entrar em contato com outro, gerando leituras erradas e problemasdiversos, além de ser extremamente dificultoso encaixar todos em um mesmomicrocontrolador. O que sujere-se, neste caso, é a utilização de uma placa decircuito impresso para a solução da circuitaria interna do Tabuleiro.
Caso seja de interesse a reprodução deste projeto, a Tabela 1 serve comoreferência aos custos para montagem do sistema completo. Os custos dos com-ponentes estão com o valor para envio incluído.
Agradecimentos
O presente trabalho não seria realizado sem a ajuda de algumas pessoas. Entreelas, está o Professor João Fabro que nos emprestou os módulos XBee com shielde o Arduino UNO. Outra pessoa que nos ajudou foi o Maycon Prasniewski queforneceu seus desenhos de Curitiba para a confecção do mapa de histórias. Porúltimo, mas não mesmo importante, foi o Jean Quevedo que criou uma músicapersonalizada para o vídeo de apresentação do nosso projeto.

Relatório Técnico: Buddy Berry 16
Tabela 1: Custos para montagem do Buddy Berry
Componente Quantidade Observações Valor em reaisCarcaça de Madeira 1 Corpo do Robô, blocos e Tabuleiro 330,00Chassi do Robô 1 Motores, Ponte H, Rodas e Roda boba 127,00Imãs 100 Não é obrigatório para o projeto 45,00Encoder e sensor 2 Necessário um para cada motor 60,00Arduino UNO 1 Para utilização no Robô (emprestado) 41,00Arduino Mega 1 Para utilização no Tabuleiro (emprestado) 80,00XBee + Shield 2 Para fazer a comunicação (emprestado) 388,00Mapa de Histórias 1 Impressão feita em lona 198,00Fita de Cobre 1 8 metros no total 30,00Materiais extras - fios, tinta, cola, pilhas e etc 100,00Valor totalPara Equipe 891,00Para Projeto 1.399,00
Referências
[1] Pesquisa brasileira de mídia 2015: Hábitos de consumo de mídia pela po-pulação brasileira.
[2] Site buddy berry.
[3] Site primo toys - cubetto.
[4] Kleiton Marcelo Ferreira de Arruda and Eduardo Adrião Araujo Silva. De-senvolvimento motor na educação infantil através da ludicidade. Connec-tion Line, 2014.
[5] Herica Salomão, Marilaine Martini, and Ana Paula Martinez Jordão. A im-portância do lúdico na educação infantil: enfocando a brincadeira e as si-tuações de ensino não direcionado. Portal dos Psicólogos, 2007.
[6] Josh Adams John-David Warren, Harald Molle. Arduino Robotics. EditoraApress, 2011.
[7] Motor dc com driver ponte h l298n.
[8] Site sobre encoder.
[9] Katsuhiko Ogata. Discrete-time control systems. Editora Prentice-Hall, 1995.
[10] Michael McRoberts. Arduino básico. Editora Novatec, 2011.

Relatório Técnico: Buddy Berry 17
[11] Comunicação passo-a-passo entre xbee e arduino.