bai giang pthh 01-01-12
DESCRIPTION
bài giảng phần tử hữu hạnTRANSCRIPT

Bài giảng FEM
Page 1 / 134
TRƯỜNG ĐẠI HỌC GIAO THÔNG VẬN TẢI
BỘ MÔN KẾT CẤU
BÀI GIẢNG
PHƯƠNG PHÁP PHẦN TỬ HỮU HẠN

Bài giảng FEM
Page 2 / 134
MỤC LỤC
MỤC LỤC ......................................................................................................................2
CHƯƠNG 1. NHẬP MÔN PHƯƠNG PHÁP PHẦN TỬ HỮU HẠN..................5
1.1. LỊCH SỬ PHÁT TRIỂN PHƯƠNG PHÁP PHẦN TỬ HỮU HẠN:............5
1.2. ĐIỀU KIỆN CÂN BẰNG: .............................................................................5
1.3. ĐIỀU KIỆN BIÊN..........................................................................................6
1.4. CÁC HÀM NỘI SUY VÀ PHÉP BIẾN PHÂN.............................................7
1.4.1. Nội suy và xấp xỉ. ...................................................................................7
1.4.1.1. Hàm nội suy Largrange........................................................................8
1.4.1.2. Hàm nội suy Hermit. ..........................................................................13
1.4.2. Sơ lược về phép tính biến phân. .........................................................15
1.5. NGUYÊN LÍ DỨNG THẾ NĂNG TOÀN PHẦN ......................................19
CHƯƠNG 2. CƠ SỞ VÀ CÁC BƯỚC PHÂN TÍCH CHUNG CỦA PHƯƠNG PHÁP PHẦN TỬ HỮU HẠN .....................................................................................22
2.1. NGUYÊN LÝ CƠ BẢN CỦA PHƯƠNG PHÁP PHẦN TỬ HỮU HẠN ..22
2.1.1. Nguyên lý chung: .................................................................................22
2.1.1.1. Quan hệ giữa biến dạng và chuyển vị:: .............................................23
2.1.1.2. Các phương trình liên tục của biến dạng : ........................................24
2.1.1.3. Quan hệ giữa ứng suất và biến dạng - định luật Hooke ....................24
2.1.2. Trình tự phân tích bài toán theo phương pháp PTHH:...................26
2.1.2.1. Rời rạc hoá miền khảo sát: ................................................................26
2.1.2.2. Chọn hàm chuyển vị: ..........................................................................26
2.1.2.3. Xây dựng phương trình cân bằng trong từng PT, thiết lập ma trận độ cứng [ ]e
K và vectơ tải tọng nút [ ]eF của phần tử thứ e:.....................................27
2.1.2.4. Ghép nối PT xây dựng phương trình cân bằng toàn hệ:....................27
2.1.2.5. Giải hệ phương trình cân bằng: .........................................................28
2.1.2.6. Xác định nội lực, ứng suất, biến dạng: ..............................................28
2.2. HÀM XẤP XỈ - ĐA THỨC XẤP XỈ - PHÉP NỘI SUY BIỂU DIỄN ĐA THỨC XẤP XỈ THEO VÉCTƠ BẬC TỰ DO CỦA PHẦN TỬ {qe} .....................28
2.2.1. Hàm xấp xỉ - đa thức xấp xỉ:...............................................................28
2.2.2. Phép nội suy biểu diễn đa thức xấp xỉ theo vectơ các bậc tự do của phần tử {qe} ..........................................................................................................29
2.3. CÁC PHƯƠNG TRÌNH CƠ BẢN...............................................................32
2.3.1. Chuyển vị, biến dạng, ứng suất trong phân tử- ma trận độ cứng phần từ, véc tơ tải phần tử..................................................................................32
2.3.2. Phép chuyển trục toạ độ......................................................................34

Bài giảng FEM
Page 3 / 134
2.3.2.1. Ma trận biến đổi toạ độ [ ]eT của PT thanh đầu nút cứng .................36
2.3.2.2. Ma trận biến đổi tạo độ [ ]eT của PT thanh đầu i nút cứng đầu k khớp
............................................................................................................38
2.3.2.3. Ma trận biến đổi toạ độ [ ]eT của PT thanh đầu i khớp đầu k nút cứng
............................................................................................................39
2.3.2.4. Ma trận biến đổi toạ độ [ ]eT của PT thanh 2 đầu khớp ....................40
2.3.3. Ghép nối phần tử- ma trận cứng tổng thể- vectơ tải tổng thể .........40
2.3.3.1. Áp dụng ma trận định vị PT [ ]eH .....................................................41
2.3.3.2. Áp dụng phương pháp số mã..............................................................42
2.3.4. Áp đặt điều kiện biên...........................................................................47
CHƯƠNG 3. PHÂN TÍCH KẾT CẤU HỆ THANH............................................51
3.1. PHẦN TỬ THANH 1 CHIỀU( THANH CHỊU KÉO - NÉN ) ...................51
3.1.1. Ma trận độ cứng PT thanh chịu kéo nén ...........................................51
3.1.2. Xác định vectơ tải trọng nút { }q eP do tải trọng tác dụng trong thanh
...............................................................................................................54
3.1.2.1. Tải trọng phân bố :.............................................................................54
3.1.2.2. Lực tập trung :....................................................................................55
3.2. PHẦN TỬ THANH 2 CHIỀU (THANH UỐN NGANG PHẲNG VÀ KÉO-NÉN) ......................................................................................................................55
3.2.1. Phần tử thanh hai đầu ngàm. .............................................................55
3.2.1.1. Xác định ma trận hàm dạng ...............................................................56
3.2.1.2. Ma trận độ cứng PT thanh chịu uốn ngang phẳng và kéo –nén. ......57
3.2.1.3. Xác định vectơ tải trọng nút { }q eP do tải trọng tác dụng trong thanh60
3.2.2. Phần tử thanh có đầu trái ngàm đầu phải khớp...............................62
3.2.2.1. Ma trận hàm dạng. .............................................................................63
3.2.2.2. Ma trận độ cứng phần tử thanh đầu ngàm đầu khớp.........................64
3.2.2.3. Véc tơ tải quy nút................................................................................65
3.2.3. Phần tử thanh có đầu trái khớp đầu phải ngàm...............................71
3.2.3.1. Ma trận hàm dạng. .............................................................................72
3.2.3.2. Ma trận độ cứng phần tử thanh đầu khớp đầu ngàm.........................72
3.2.3.3. Véc tơ tải trọng nút {Pq}e phần tử thanh đầu khớp đầu ngàm. .........73
3.2.4. Phần tử thanh 2 đầu khớp. .................................................................74
3.3. ÁP DỤNG PTHH TRONG TÍNH TOÁN HỆ KHUNG, DẦM PHẲNG. ..75
3.4. ÁP DỤNG PTHH TRONG TÍNH TOÁN HỆ CHỊU TÁC DỤNG CỦA NHIỆT ĐỘ THAY ĐỔI VÀ CHUYỂN VỊ BAN ĐẦU. ..........................................78

Bài giảng FEM
Page 4 / 134
CHƯƠNG 4. BÀI TOÁN PHẲNG .........................................................................80
4.1. GIỚI THIỆU.................................................................................................80
4.2. BÀI TOÁN ỨNG SUẤT PHẲNG. ..............................................................80
4.2.1. Giả thiết ................................................................................................80
4.2.2. Các phương trình cơ bản của bài tốn ứng suất phẳng .....................82
4.2.3. Điều kiện biên.......................................................................................82
4.2.4. Phương pháp giải bài tốn phẳng ........................................................85
4.2.5. Phương trình trên phần tử hữu hạn ..................................................86
4.2.5.1. Rời rạc hóa kết cấu thành n phần tử như hình vẽ. .............................86
4.2.5.2. Nội suy trên phần tử ...........................................................................87
4.2.5.3. Năng lượng phần tử-Phương trình Độ Cứng phần tử-Vector tải trọng. ............................................................................................................88
4.2.6. Phần tử tam giác ứng suất phẳng 3 nút .............................................89
4.2.6.1. Dạng hình học ....................................................................................89
4.2.6.2. Hệ tọa độ dùng để biểu diễn phần tử .................................................90
4.2.6.3. Phép Nội suy-Hàm Dạng....................................................................92
4.2.6.4. Phương trình chuyển vị –Biến dạng ...................................................95
4.2.6.5. Phương trình Ứng suất –Biến dạng ...................................................96
4.2.6.6. Ma trận độ cứng .................................................................................96
4.2.6.7. Vector tải trọng nút ............................................................................97
4.2.6.8. Phần tử tam giác bậc cao...................................................................99
4.2.6.9. Ví dụ mẫu..........................................................................................100
4.2.7. Phần tử chữ nhật suất phẳng 4 nút ..................................................114
4.2.7.1. Dạng hình học ..................................................................................114
4.2.7.2. Phép Nội suy-Hàm Dạng..................................................................114
4.2.7.3. Phương trình chuyển vị –Biến dạng .................................................123
4.2.7.4. Phương trình Ứng suất –Biến dạng .................................................124
4.2.7.5. Ma trận độ cứng ...............................................................................124
4.2.7.6. Vector tải trọng nút ..........................................................................125
4.2.7.7. Phần tử tứ giác bậc cao ...................................................................125
4.2.7.8. Ví dụ mẫu..........................................................................................126

Bài giảng FEM
Page 5 / 134
CHƯƠNG 1. NHẬP MÔN PHƯƠNG PHÁP PHẦN TỬ HỮU HẠN.
1.1. LỊCH SỬ PHÁT TRIỂN PHƯƠNG PHÁP PHẦN TỬ HỮU HẠN:
Phương pháp phần tử hữu hạn (PP PTHH) là một phương pháp tính đã được hình
thành và phát triển trong vòng vài chục năm trở lại đây, nhưng do yêu cầu tính toán
của một bài tốn thực tế thường đòi hỏi một khối lượng rất lớn, do vậy việc ứng dụng
PP PTHH trước đây gặp không ít khó khăn. Chỉ cho đến khi có sự xuất hiện của các
máy tính cá nhân cùng với những tiến bộ to lớn của khoa học công nghiệp tin học
trong những năm gần đây mới thật sự cho phép phương pháp tính này được ứng dụng
một cách phổ biến và rộng rãi. Cùng với việc tính giải các đại lượng cơ học của kết
cấu như biến dạng; ứng suất; chuyển vị,… PP PTHH còn là cơ sở của lĩnh vực mô
phỏng hố trong các bài tốn thiết kế . Thông qua sự phát triển của kỹ thuật đồ họa trên
máy tính người ta có thể mô phỏng hố các hoạt động của kết cấu; giả định vô số các
phương án tính tốn để từ đó chọn lựa phương án tối ưu. Điều này cho phép giảm chi
phí và thời gian thực hiện các phương pháp truyền thống. Cùng với sự tiến bộ của
khoa học kỹ thuật máy tính đã trở thành một bộ phận quen thuộc và không thể thiếu
trong các hoạt động nghiên cứu cũng như ứng dụng thực tiễn. Theo đó, cùng ngày
càng xuất hiện nhiều hơn các chương trình trình tính tốn sử dụng PP PTHH với phạm
vi ứng dụng ngày càng phong phú và đa dạng: tính tốn kết cấu; tính tốn nhiệt; điện từ,
mô phỏng, tối ưu hóa.v.v…
1.2. ĐIỀU KIỆN CÂN BẰNG:
Dưới tác dụng của tải trọng bên ngoài, vật thể chịu lực ( có thể tích V, bề mặt S và
những liên kết cần thiết nào đó để đảm bảo khả năng chịu lực mà khong bị biến hình)
bị biến dạng và bên trong nó sẽ xuất hiện ứng suất.
Ứng suất tại các điểm khác nhau là khác nhau và được xác định bởi trạng thái ứng
suất tại điểm đó. Trạng thái ứng suất tại một điểm hoàn toàn xác định khi biết các ứng
suất trên 3 mặt vuông góc nhau tại điểm đó.
Nếu tách ra từ vật thể một phân tố vật thể thì phân tố này phải ở trạng thái cân bằng
bởi các nội lực (ứng suất) và các ngoại lực (lực khối) tác dụng lên nó.

Bài giảng FEM
Page 6 / 134
Sử dụng các phương trình cân bằng tĩnh học và bỏ đi các vô cùng bé bậc cao, ta có
biểu thức của định luật đối ứng của ứng suất tiếp:
yx zy xz, ,xy yz zxτ τ τ τ τ τ= = = (1.1)
Hình 1.1.
Trạng thái ứng tại 1 điểm được biểu diễn
bởi các vector:
{ } { }, , , , ,T
x y z xy yz zxσ σ σ σ τ τ τ= (1.2)
Ta có quan hệ vi phân giữa các thành phần ứng suất:
0
0
0
xyx xzx
xy y yzy
yzxz zz
gx y z
gx y z
gx y z
τσ τ
τ σ τ
ττ σ
∂⎧∂ ∂+ + + =⎪ ∂ ∂ ∂⎪
⎪∂ ∂ ∂⎪ + + + =⎨ ∂ ∂ ∂⎪⎪ ∂∂ ∂
+ + + =⎪∂ ∂ ∂⎪⎩
(1.3)
1.3. ĐIỀU KIỆN BIÊN
• Điều kiện biên động học trên Sđ (liên quan đến chuyển vị hoặc đạo hàm của
chuyển vị đã biết).
• Điều kiện biên tĩnh học trên St (thể hiện sự cân bằng và quan hệ giữa nội lực và
lực mặt cho trước) ⇒ Điều kiện bề mặt:

Bài giảng FEM
Page 7 / 134
στ
η
Hình 1.2.
x xy xz x
xy y yz y
zx zy z z
l m n p
l m n p
l m n p
σ τ τ
τ σ τ
τ τ σ
⎧ + + =⎪
+ + =⎨⎪ + + =⎩
(1.4)
trong đó: { }, ,T
x y zp p p p= là lực mặt và (l , m , n) là cosin chỉ phương của pháp tuyến
ngồi η của mặt biên tại điểm khảo sát.
1.4. CÁC HÀM NỘI SUY VÀ PHÉP BIẾN PHÂN
1.4.1. Nội suy và xấp xỉ.
Trong quá trình tính toán ta phải tìm các trị của hàm số ( )y f x= tại các điểm x bên
trong đoạn [a,b] khi biết các giá trị ( ) [ ], , , 0,1, 2,..,i i iy f x x a b i n= ∈ = , hoặc khi quan
hệ giải tích ( )y f x= đã có sẳn nhưng phức tạp, hoặc cần tìm đạo hàm, tích phân của
hàm số,.…Khi đó người ta thường xây dựng một hàm số ( )P x đơn giản và thỏa mãn
điều kiện ( ) ( ) [ ], , , 1, 2,..,i i iP x f x x a b i n= ∈ = và khi i j≠ thì i jx x≠ .Tại các giá trị
ix x≠ thì hàm ( )P x chỉ xấp xỉ ( )y f x= với một độ chính xác nào đó. Hàm ( )P x gọi
là hàm nội suy còn ix là các mốc nội suy còn bài toán tìm hàm ( )P x gọi là bài toán nội
suy.
Khi xây dựng hàm ( )P x ta phải chọn dạng hàm sao cho nó có đặc tính giống hàm
( )f x .

Bài giảng FEM
Page 8 / 134
y
xO
y1
yi
yn
x1 x 2 x nx i
y2
Hình 1.3
Trong thực tế hàm hàm nội suy thường được chọn là các hàm :
• Đa thức đại số
• Đa thức lượng giác
• Phân thức đại số
1.4.1.1. Hàm nội suy Largrange.
Tìm hàm nội suy dưới dạng hàm đa thức đại số khi biết n mốc nội suy phân biệt :
( ) [ ], , , 1, 2,..,i i i
i j
y f x x a b i ni j x x
= ∈ =
≠ → ≠ (1.5)
Đa thức cần lập ( )P x có bậc 1m n≤ − , nhận các giá trị iy cho trước ứng với các ix :
( )i iP x y= (1.6)
Ký hiệu:
( )( )( ) ( )( ) ( )
( )( ) ( )( ) ( )1 2 1 1
1 2 1 1
- - ... - - ...
- - ... - - ... -j j n
jj j j j j j j n
x x x x x x x x x xx
x x x x x x x x x x− +
− +
−Φ =
(1.7)
Dễ dàng thấy :
( )0 khi 1 khi j i ij
i jx
i jδ
≠⎧Φ = = ⎨ =⎩
(1.8)
ijδ : ký hiệu Kronecker delta
Từ đó tìm được hàm nội suy

Bài giảng FEM
Page 9 / 134
( ) ( )1
n
i ii
P x y x=
= Φ∑ (1.9)
hay viết dưới dạng ma trận :
( ) ( ) ( ) ( )
1
21 2 ....
...n
n
yy
P x x x x
y
⎡ ⎤⎢ ⎥⎢ ⎥= Φ Φ Φ⎡ ⎤⎣ ⎦ ⎢ ⎥⎢ ⎥⎣ ⎦
(1.10)
Dễ dang thấy hàm nội suy ( )P x thỏa mãn yêu cầu của bài toán đặt ra :
( ) ( )1
n
j i i j ji
P x y x y=
= Φ =∑ (1.11)
Đa thức ( )P x gọi là đa thức nội suy Lagrange. Ta gọi các hàm ( )i xΦ là hàm dạng.
Tính chất của hàm dạng ( )i xΦ :
1, Hàm dạng thỏa mãn tính chất Kronecker delta, tức là :
( ) 0 khi 1 khi i j ij
i jx
i jδ
≠⎧Φ = = ⎨ =⎩
(1.12)
2, ( )G x là đa thức đại số bất kỳ bậc nhỏ hơn n thì :
( ) ( ) ( )1
n
i ii
G x G x x=
= Φ∑ (1.13)
trường hợp ( ) 1G x = thì ta sẽ có :
( )1
1n
ii
x=
Φ =∑ (1.14)
tức là tổng của tất cả các hàm dạng bằng đơn vị.

Bài giảng FEM
Page 10 / 134
Ví dụ 1.1 : Tìm hàm nội suy ba điểm cách đều :
y3
x =L/22
y
xO
y1
y2
x =01 x =L3
Hình 1.4
Tìm hàm nội suy với ba mốc cách đều nhau , chiều dài đoạn nội suy là L.
Ta có :
( ) ( )( )( )( )
( )
( ) ( )( )( )( )
( )
( ) ( )( )( )( )
2 31 2
1 2 1 3
1 32 2
2 1 2 3
1 23 2
3 1 3 2
- - L - - 2 2 - -
- - - L 4
- -
- - - 2 2 - -
Lx xx x x xx
x x x x L
x x x x x xx
x x x x L
Lx xx x x xx
x x x x L
⎛ ⎞⎜ ⎟⎝ ⎠Φ = =
Φ = = −
⎛ ⎞⎜ ⎟⎝ ⎠Φ = =
Hàm nội suy :
( ) ( )( ) ( )3
1 2 32 2 21
- - L - - L2 22 4 2i ii
L Lx x x xx xy x x y y y y
L L L=
⎛ ⎞ ⎛ ⎞⎜ ⎟ ⎜ ⎟⎝ ⎠ ⎝ ⎠= Φ = − +∑
Trong phương pháp phần tử hữu hạn người ta hay biểu diễn theo tọa độ tự nhiên, tức là
đặt x uL= với [ ]0,1u ∈ , khi đó hàm nội suy có dạng :
( ) ( ) ( )1 2 31 12 - - 1 4 -1 2 -2 2
y x u u y u u y u u y⎛ ⎞ ⎛ ⎞= − +⎜ ⎟ ⎜ ⎟⎝ ⎠ ⎝ ⎠
Nội suy Lagrange trong trương hợp hai biến :
Tìm hàm nội suy dưới dạng hàm đa thức đại số khi biết n mốc nội suy phân
biệt :

Bài giảng FEM
Page 11 / 134
( ) [ ] [ ], , , , , , 1, 2,..,i i i i i
i j
i j
z f x y x a b y c d i n
x xi j
y y
= ∈ ∈ =
≠⎡≠ → ⎢ ≠⎢⎣
Trong trường hợp i j
i j
x xi j
y y
≠⎧⎪∀ ≠ → ⎨ ≠⎪⎩
ta đặt
( )( )( ) ( )( ) ( )
( )( ) ( )( ) ( )
( )( )( ) ( )( ) ( )
( )( ) ( )( ) ( )
1 2 1 1
1 2 1 1
1 2 1 1
1 2 1 1
- - ... - - ...
- - ... - - ... -
- - ... - - ...
- - ... - - ... -
j j nj
j j j j j j j n
j j nj
j j j j j j j n
x x x x x x x x x xx
x x x x x x x x x x
y y y y y y y y y yy
y y y y y y y y y y
− +
− +
− +
− +
−Φ =
−Η =
Dễ dang thấy :
( ) ( )0 khi 1 khi j i j i ij
i jx y
i jδ
≠⎧Φ = Η = = ⎨ =⎩
Đặt ( ) ( ) ( ),j j jN x y x y= Φ Η
Khi đó hàm nội suy :
( ) ( )1
, ,n
i ii
f x y z N x y=
= ∑
Trong trường hợp i j∃ ≠ mà ,i j i jx x y y= ≠ thì ta bớt thừa số ( )- ix x và ( )-j ix x ở hàm
( )j xΦ , ta cũng phải làm động tác tương tự với hàm ( )i xΦ . Ta cũng làm tương tự với
hàm ( )j iyΗ khi i j∃ ≠ mà ,i j i jx x y y≠ = .
Ví dụ 1.2 : Tìm hàm nội suy qua 4 điểm nằm ở 4 góc của hình chữ nhật , biết tọa độ
của 4 điểm và giá trị iz hàm số tại các điểm đó:

Bài giảng FEM
Page 12 / 134
L
L
x
y
y
xO
y1
x1 x 2
y2
z2z1
z4z3
Hình 1.5.
Lập các hàm :
( ) ( )( ) ( ) ( )
( )
( ) ( )( ) ( ) ( )
( )
2 11 2
1 2 2 1
2 11 2
1 2 2 1
- - ;
- -
- - ;
- -
x x x xx x
x x x x
y y y yy y
y y y y
Φ = Φ =
Η = Η =
Hàm nội suy :
( ) ( ) ( ) ( ) ( ) ( ) ( ) ( ) ( )( )( )
( )( )( )( )
( )( )( )( )
( )( )( )( )
( )( )
1 1 1 2 2 1 3 2 2 4 1 2
2 2 1 2 1 1 2 11 2 3 4
1 2 1 2 2 1 1 2 2 1 2 1 1 2 2 1
,
- - - - - - - - - - - - - - - -
f x y z x y z x y z x y z x y
x x y y x x y y x x y y x x y yz z z z
x x y y x x y y x x y y x x y y
= Φ Η + Φ Η + Φ Η + Φ Η
= + + +
Trong phương pháp phần tử hữu hạn thường tính với hệ tọa độ tự nhiên, khi đó điểm
( )1 1,x y sẽ được lấy là gốc tọa độ, tức là : 1 1 0x y= = và đặt hai biến :
2
2
x
y
x xx Ly yy L
η
ξ
= =
= =
Khi đó hàm nội suy ( ) ( ) ( ), , ,x yf x y f L L gη ξ η ξ= = = ....
Ví dụ 1.3 : Tìm hàm nội suy qua 4 điểm bất kỳ và không có hai điểm nào nằm trên
đường thẳng song song với trục Ox hoặc trục Oy :

Bài giảng FEM
Page 13 / 134
y
xO
y1
y4
x1 x 4x 2 x 3
y2
y3
Hình 1.6
Lập các hàm :
( ) ( )( )( )( )( )( )
( ) ( )( )( )( )( )( )
2 3 41
1 2 1 3 1 4
2 3 41
1 2 1 3 1 4
- - - - -
- - - - -
x x x x x xx
x x x x x x
y y y y y yy
y y y y y y
−Φ =
−Η =
......
Hàm nội suy :
( ) ( ) ( ) ( ) ( ) ( ) ( ) ( ) ( )1 1 1 2 2 2 3 3 3 4 4 4,f x y z x y z x y z x y z x y= Φ Η + Φ Η + Φ Η + Φ Η
1.4.1.2. Hàm nội suy Hermit.
Trong nhiều bài toán khi nội suy, ngoài việc thỏa mãn các giá trị hàm số tại các
mốc nội suy còn phải thỏa mãn các giá trị đạo hàm tại đó nữa.
y'i
y'n
y
xO
y1
yi
yn
x1 x 2 x nx i
y2
y'1
y'2
Hình 1.7
Tìm hàm nội suy ( )P x dưới dạng hàm đa thức đại số khi biết n mốc nội suy
phân biệt :

Bài giảng FEM
Page 14 / 134
( ) [ ]( ) [ ]
, , , 1, 2,..,
, , , 1, 2,..,i i i
i i i
i j
y f x x a b i n
y f x x a b i ni j x x
= ∈ =
′ ′= ∈ =
≠ → ≠
(1.15))
Đa thức cần lập ( )P x có bậc 2 1m n≤ − , nhận các giá trị ,i iy y′ cho trước ứng với các
ix :
( )( )
i i
i i
P x y
P x y
=
′ ′= (1.16)
Kết quả hàm nội suy ( )P x (xem [1]) :
( ) ( )( ) ( ) ( ) ( )
( ) ( )1
1n
n i ni i i i
i n i i n i
x xP x y x x y x x
x x x xω ωω ω=
⎧ ⎫⎡ ⎤ ⎧ ⎫′′ ′′⎪ ⎪⎪ ⎪′= − − + −⎨ ⎬⎨ ⎬⎢ ⎥′ ′−⎪ ⎪⎪ ⎪⎣ ⎦ ⎩ ⎭⎩ ⎭∑ (1.17)
Với ( ) ( )( ) ( ) ( )1 21
- - ...n
n n ii
x x x x x x x x xω=
= − = −∏
Ví dụ 1.4 : Tìm hàm nội suy Hermitte hai điểm mốc :
Trong bài toán dầm chịu uốn, biết chuyển vị thẳng đứng và góc xoay ở hai đầu đoạn
thanh, tìm hàm nội suy của chuyển vị.
θ1
θ2
y
xO
y1
y2
x =01 x =L2
Hình 1.8.
Chiều dài đoạn dầm là L, góc xoay ở hai đầu dầm :
( )( )
1 1
2 2
y x
y x
θ
θ
′=
′=
Thay vào công thức nội suy Hermitte ta tìm được hàm nội suy chuyển vị :
( ) ( )2 3 2 2 3 2
1 1 2 22 3 2 2 3 21 3 2 1 2 3 2x x x x x x x xy x P x y x y xL L L L L L L L
θ θ⎛ ⎞ ⎛ ⎞ ⎛ ⎞ ⎛ ⎞
= = − + + − + + − + − +⎜ ⎟ ⎜ ⎟ ⎜ ⎟ ⎜ ⎟⎝ ⎠ ⎝ ⎠ ⎝ ⎠ ⎝ ⎠

Bài giảng FEM
Page 15 / 134
hay viết dưới dạng ma trận:
( ) [ ]1
11 2 3 4
2
2
y
y x N N N Nyθ
θ
⎡ ⎤⎢ ⎥⎢ ⎥=⎢ ⎥⎢ ⎥⎣ ⎦
trong đó :
2 3 2 3
1 32 3 2 3
2 2
2 42 2
1 3 2 3 2
1 2
x x x xN NL L L L
x x x xN x N xL L L L
⎧= − + = −⎪
⎪⎨ ⎛ ⎞ ⎛ ⎞⎪ = − + = − +⎜ ⎟ ⎜ ⎟⎪ ⎝ ⎠ ⎝ ⎠⎩
1.4.2. Sơ lược về phép tính biến phân.
Trong nhiều lĩnh vực của toán học ứng dụng, chúng ta gặp các tích phân có chứa
các đạo hàm cấp một và cấp cao của hàm số. Ví dụ:
[ ] ( )2
1, , '
x
xI y F x y y dx= ∫ (1.18)
Trong đó biến y cùng các đạo hàm y’ là các hàm của x. tích phân có cận từ x1 đế x2 và
hàm ( )y x phải đi qua hai điểm điểm cố định ( ) ( )1 1 2 2x ,y , x ,y với :
( )( )
1 1
2 2
y = y x
y = y x (1.19)
Với mỗi hàm ( )y x thì “hàm” [ ]I y sẽ có một giá trị cụ thể, ta nói [ ]I y là phiếm
hàm của ( )y x , vai trò của ( )y x giống như đối số x trong hàm ( )f x . Bài toán tìm
hàm ( )y x sao cho phiếm hàm [ ]I y đạt cực trị gọi là phép tính biến phân.

Bài giảng FEM
Page 16 / 134
y (x)*
y(x)
y
xO
y1
y2
x1 x 2
αη( )x
Hình 1.9.
Giả sử *y là nghiệm xấp xỉ, khi đó biến phân tới nghiệm chính xác y được biểu
diễn như sau:
( ) ( ) ( )*y x y x xα η= + (1.20)
trong đó hàm ( )xη là hàm tùy ý thỏa mãn điều kiện biên :
( ) ( )1 2 0x xη η= = (1.21)
và α là một tham số bé. Thay vào phiếm hàm [ ]I y ta sẽ có một hàm số của α :
( )2* * *
1, ,
x
xI y F x y y dx′⎡ ⎤ =⎣ ⎦ ∫
[ ] ( ) ( ) ( ) ( )2
1, ,
x
xI F x y x x y x x dxα αη αη′ ′→ = + +⎡ ⎤⎣ ⎦∫
(1.22)
Như thế bài toán tìm cực trị của phiếm hàm [ ]I y được đưa về bài toán tìm cực trị
của hàm số ( )I α . Để tìm cực trị thì đạo hàm cấp 1 của hàm ( )I α phải bằng không tại
0α = . Ta có :
( ) ( )2
* *1
x
x
dI F Fx x dxd y y
η ηα
⎡ ⎤∂ ∂ ′= +⎢ ⎥′∂ ∂⎣ ⎦∫ (1.23)
Ta tính tích phân này bằng phương pháp tích phân từng phần :
( ) ( ) ( )2
1
2 2
* * *1 1
xx x
x xx
dI F F d Fx dx x x dxd y y dx y
η η ηα
⎛ ⎞∂ ∂ ∂′= = − ⎜ ⎟′ ′ ′∂ ∂ ∂⎝ ⎠∫ ∫ (1.24)
( )xη là hàm tùy ý thỏa mãn điều kiện biên nên :

Bài giảng FEM
Page 17 / 134
( )2
1
* 0x
x
F xy
η∂=
′∂ (1.25)
Vậy :
( )2
* *1
x
x
dI F d F x dxd y dx y
ηα
⎡ ⎤⎛ ⎞∂ ∂= −⎢ ⎥⎜ ⎟′∂ ∂⎝ ⎠⎣ ⎦
∫ (1.26)
Tại 0α = :
( )2
10
0x
x
dI F d F x dxd y dx yα
ηα =
⎡ ⎤⎛ ⎞∂ ∂= − =⎢ ⎥⎜ ⎟′∂ ∂⎝ ⎠⎣ ⎦
∫ (1.27)
Điều kiện 0
0dId αα =
= thỏa mãn với hàm ( )xη bất kỳ thỏa mãn điều kiện biên nên :
0F d Fy dx y
⎛ ⎞∂ ∂− =⎜ ⎟′∂ ∂⎝ ⎠
(1.28)
Phương trình này gọi là phương trình Ơle-Lagrange
Bằng cách giải phương trình vi phân này kết hợp điều kiện biên sẽ tìm được nghiệm
của bài toán biến phân.
Biến phân cấp 1 của phiếm hàm [ ]I y là đại lượng xác định bằng biểu thức :
0
dIId α
δ αα =
⎛ ⎞= ⎜ ⎟⎝ ⎠
(1.29)
và biến phân yδ của hàm ( )y x :
( ) ( ) ( )*y y x y x xδ α η= − = (1.30)
Dễ thấy :
( )2 2
1 10
x x
x x
dI F d F F d FI x dx ydxd y dx y y dx yα
δ α αη δα =
⎡ ⎤ ⎡ ⎤⎛ ⎞ ⎛ ⎞∂ ∂ ∂ ∂⎛ ⎞= = − = −⎢ ⎥ ⎢ ⎥⎜ ⎟ ⎜ ⎟⎜ ⎟ ′ ′∂ ∂ ∂ ∂⎝ ⎠ ⎝ ⎠ ⎝ ⎠⎣ ⎦ ⎣ ⎦∫ ∫ (1.31)
Từ điều kiện cực trị của phiếm hàm [ ]I y là 0
0dId αα =
= suy ra 0Iδ =
Một số quy tắc tính biên phân :
1. Biến phân và đạo hàm có tính giao hoán với nhau :

Bài giảng FEM
Page 18 / 134
( ) ( ) ( ) ( )y y x x y x xδ α η α η′′ ′ ′= + − =⎡ ⎤⎣ ⎦ (1.32)
mặt khác :
( ) ( ) ( ) ( )*d dy y x y x xdx dx
δ α η ′⎡ ⎤= − =⎣ ⎦ (1.33)
Vậy :
( )d dyydx dx
δ δ ⎛ ⎞= ⎜ ⎟⎝ ⎠
(1.34)
Biến phân hàm nhiều biến tương tự vi phân hàm nhiều biến:
( ), ,F F y z tF F FF y z ty z t
δ δ δ δ
=
∂ ∂ ∂= + +
∂ ∂ ∂
(1.35)
Biến phân của hàm dạng hàm hợp chứa các đạo hàm :
( ), ', ''
' ''' ''
F F y y yF F FF y y yy y y
δ δ δ δ
=
∂ ∂ ∂= + +
∂ ∂ ∂ (1.36)
2. Biến phân và tích phân có tính giao hoán với nhau :
( ) ( ) ( ) ( )2 2
1 1
2 2
1 1
x x
x x
x x
x x
F F F FI x x dx x x dxy y y y
F Fy y dx Fdxy y
δ α η η αη αη
δ δ δ
⎡ ⎤ ⎡ ⎤∂ ∂ ∂ ∂′ ′= + = +⎢ ⎥ ⎢ ⎥′ ′∂ ∂ ∂ ∂⎣ ⎦ ⎣ ⎦⎡ ⎤∂ ∂ ′= + =⎢ ⎥′∂ ∂⎣ ⎦
∫ ∫
∫ ∫ (1.37)
Vậy :
2 2
1 1
x x
x xFdx Fdxδ δ=∫ ∫ (1.38)
Trường hợp phiếm hàm phụ thuộc vào n hàm độc lập ( )iy x và các đạo hàm
( )iy x′ của chúng :
( ) ( ) ( ) ( ) ( ) ( )2
1 2 1 21, , , ... , , , ...,
x
n nxI F x y x y x y x y x y x y x dx′ ′ ′= ⎡ ⎤⎣ ⎦∫ (1.39)
Cũng làm tương tự như trường hợp đơn giản, ta đưa bài toán về tìm cực trị của
hàm n biến ( )1 2, ,..., nI α α α trong đó iα là các tham số bé.

Bài giảng FEM
Page 19 / 134
Ví dụ 1.5 : Tìm đường đi ngắn nhất đi qua hai điểm ( )1 1,A x y và ( )2 2,B x y :
y
xO
y1
y2
x1 x 2
Hình 1.10.
Gọi ( )y x là hàm số đi qua hai điểm A, B. Chiều dài đường đi từ A đến B :
( )2 2 2
1 11
x x
AB x xl ds y dx′= = +∫ ∫
Chiều dài này chính là phiếm hàm của ( )y x . Ta phải tìm hàm ( )y x để
minABl → . Từ đó ta có :
( )2 2
11 0
x
AB xl y dxδ δ ′= + =∫
Ở phiếm hàm này ta có ( )21F y′= + , thay vào phương trình Ơle – Lagrange :
( )
( )
2
2
01
1
F d F d yy dx y dx y
y C y hsy
⎛ ⎞′⎛ ⎞∂ ∂ ⎜ ⎟− = − =⎜ ⎟ ⎜ ⎟′∂ ∂⎝ ⎠ ′+⎝ ⎠′
′⇒ = ⇒ =′+
Vậy hàm ( )y x sẽ có dạng bậc nhất :
( )y x ax b= +
Đường thẳng này phải đi qua hai điểm A,B. Vậy đường đi ngắn ngất đi qua hai
điểm A,B chính là đường thẳng nối hai điểm A,B.
1.5. NGUYÊN LÍ DỨNG THẾ NĂNG TOÀN PHẦN
Xét một vật thể đàn hồi có thể tích V, diện tích mặt chịu tải bS , diện tích bề mặt có
điều kiện biên là nS .

Bài giảng FEM
Page 20 / 134
Ngoại lực tác dụng gồm:
- Lực thể tích trên một đơn vị thể tích:
{ } { }TX Y Zρ = (1.40)
- Lực bề mặt trên 1 đơn vị diện tích:
{ } { }Tb b bq X Y Z= (1.41)
Vectơ chuyển vị : { } { }, , Tu u v w= (1.42)
Vectơ ứng suất: { } { }, , , , ,T
x y z xy yz zxσ σ σ σ τ τ τ= (1.43)
Vectơ biến dạng: { } { }, , , , ,T
x y z xy yz zxε ε ε ε γ γ γ= (1.44)
Ta có công ngoại lực trên các chuyển dời { }u :
{ } { } { } { }
( ) ( )
W
w . . .w
T T
V S
b b bV S
u dV u q dS
Xu Yv Z dV X u Y v Z dS
ρ= + =
+ + + + +
∫ ∫
∫ ∫ (1.45)
Ta có thế năng biến dạng đàn hồi:
{ } { } { } [ ]{ }1 1 2 2
T T
V V
dV D dVε σ ε ε= =∫ ∫U (1.46)
Khi đó thế năng toàn phần ∏ của một hệ được xác định:
WΠ = U - (1.47)
Nội dung nguyên lí: Trong tất cả các trường chuyển vị ( trạng thái chuyển vị) khả
dĩ động ( tức thoã mãn các điều kiện tương thích và điều kiện biên động học);
trường chuyển vị thực ( tức trường chuyển vị tương ứng với sự cân bằng của vật
thể) sẽ ứng với thế năng toàn phần Π của hệ đạt giá trị dừng.
Tóm lại, khi vật thể cân bằng thì thế năng toàn phần Π của hệ đạt giá trị dừng. Tức là
nếu Π được biểu diễn theo trường chuyển vị { }u thì vật thể cân bằng khi:
{ }( ) { }( ) { }( )W 0u U u uδ δ δΠ = − =

Bài giảng FEM
Page 21 / 134
Theo nguyên lý này, nếu trường chuyển vị { }u thoã mãn các điều kiện biên và làm
Π của hệ đạt giá trị dừng sẽ chính là trường chuyển vị thực và làm thoã mãn các
phương trình cân bằng.
Đây chính là cơ sở để rút ra phương trình cân bằng của phương pháp PTHH.
Bài giảng FEM
Page 22 / 134
CHƯƠNG 2. CƠ SỞ VÀ CÁC BƯỚC PHÂN TÍCH CHUNG CỦA PHƯƠNG
PHÁP PHẦN TỬ HỮU HẠN
2.1. NGUYÊN LÝ CƠ BẢN CỦA PHƯƠNG PHÁP PHẦN TỬ HỮU HẠN
2.1.1. Nguyên lý chung:
Phương pháp phần tử hữu hạn là một phương pháp số đặc biệt có hiệu quả để tìm
dạng gần đúng của một hàm chưa biết trong miền xác định V. Tuy nhiên, phương pháp
PTHH không tìm dạng xấp xỉ của một hàm cần tìm trên toàn miền V mà chỉ trong
miền con Ve (phần tử thứ e) thuộc miền xác định V. Do đó phương pháp này thích hợp
với hàng loạt bài toán vật lý và kĩ thuật, trong đó miền xác định cần tìm được xác định
trên các miền phức tạp gồm nhiều vùng nhỏ có đặc tính vật lý, hình học khác nhau,
chịu những điều kiện biên khác nhau. Sự ra đời và phát triển của phương pháp PTHH
đã đáp ứng đòi hỏi trong việc giải quyết bài toán thiết kế các kết cấu phức tạp trong
lĩnh vực hàng không, hàng hải, xây dựng….
Trong phương pháp PTHH, miền V được chia thành một số hữu hậnccs miền con
Ve , gọi là các phần tử (PT). Các PT này được nối với nhau tại các điểm định trước
thường tại các đỉnh PT ( thậm chí tại các điểm biên PT) gọi là nút. Trong phạm vi mỗi
phần tử, đại lượng cần tìm được lấy xấp trong dạng một hàm đơn giản gọi là hàm xấp
xỉ. Các hàm xấp xỉ được biểu diễn qua các giá trị của hàm và có thể cả giá trị của đạo
hàm của nó tại các các điểm nút của PT. Các giá trị này gọi là các bậc tự do của PT và
được xem là ẩn số cần tìm của bài toán.
Với bài toán cơ học vật rắn biến dạng, tuỳ theo ý nghĩa vật lý của hàm xấp xỉ có
thể phân tích bài toán theo 3 loại mô hình sau:
1) Mô hình chuyển vị: Xem chuyển vị là đại lượng cần tìm và hàm xấp xỉ biểu diễn
gần đúng dạng phân bố của chuyển vị trong PT.
2) Mô hình cân bằng: Hàm xấp xỉ biểu diễn gần đúng dạng phân bố của ứng suất hay
nội lực trong PT
3) Mô hình hỗn hợp: Coi các đại lượng chuyển vị và ứng suất là hai yếu tố độc lập
riêng biệt. Các hàm xấp xỉ này biểu diễn gần đúng dạng phân bố của cả ứng suất và
chuyển vị trong PT.

Bài giảng FEM
Page 23 / 134
Trong phạm vi bài giảng này chỉ đề cập tới nội dung cơ bản của PP PTHH – mô
hình chuyển vị và ứng dụng của nó vào tính toán hệ thanh phẳn với vật liệu làm việc
trong giới hạn đàn hồi.
2.1.1.1. Quan hệ giữa biến dạng và chuyển vị::
Dưới tác dụng của tải trọng, vật thể chịu lực bị biến dạng, các điểm trong vật thể
chuyển dịch tới vị trí mới trong không gian. Ta nói rằng các điểm có chuyển vị.
Hình 2.1
Xét điểm M (x,y,z), do biến dạng,
điểm M bị dịch chuyển tới vị trí M’.
Hình chiếu MM’ lên 3 trục toạ độ là u,
v, w là các chuyển vị thành phần.
Vectơ chuyển vị:
{ } { }, , Tu u v w=
Cũng giống như trạng thái ứng suất, tập hợp các biến dạng theo các phương bất kỳ
qua một điểm được gọi là trạng thái biến dạng. TTBD tại một điểm xác định bằng
vectơ biến dạng: { } { }, , , , ,T
x y z xy yz zxε ε ε ε γ γ γ=
Quan hệ giữa các biến dạng và các thành phần chuyển vị như sau:
{ } [ ]{ }
,
,
,
x xy
y yz
z zx
u u vx y xv w v uy y zw u wz z x
ε γ
ε γ ε
ε γ
∂ ∂ ∂⎧ = = +⎪ ∂ ∂ ∂⎪∂ ∂ ∂⎪ = = + ⇒ = ∇⎨ ∂ ∂ ∂⎪
⎪ ∂ ∂ ∂= = +⎪
∂ ∂ ∂⎩
(2.1)
Trong đó:
[ ]
0 0
0 0
0 0
0
0
0
x
y
z
y x
z y
z x
∂⎡ ⎤∂⎢ ⎥
⎢ ⎥∂∂⎢ ⎥
⎢ ⎥∂⎢ ⎥∂∇ = ⎢ ⎥∂ ∂⎢ ⎥∂ ∂⎢ ⎥
∂ ∂⎢ ⎥∂ ∂⎢ ⎥
⎢ ⎥∂ ∂⎢ ⎥∂ ∂⎣ ⎦
là ma trận toán tử vi phân. (2.2)

Bài giảng FEM
Page 24 / 134
2.1.1.2. Các phương trình liên tục của biến dạng :
Các thành phần biến dạng của {ε} không độc lập nhau mà giữa chúng có mối quan hệ
được gọi là các phương trình liên tục của biến dạng :
2 22 2
2 2
2 2 22
2 2
2 22 2
2 2
; 2
; 2
; 2
y xy xy yzx zx x
y yz xy yz yzxz
yz xyx zx zxz z
y x x y x y z x y z
z y y z y z x y z x
x z z x z x y z x y
ε γ γ γε γ ε
ε γ γ γ εγε
γ γε γ γε ε
⎧ ∂ ∂ ∂ ∂⎛ ⎞∂ ∂ ∂∂+ = + − =⎪ ⎜ ⎟∂ ∂ ∂ ∂ ∂ ∂ ∂ ∂ ∂ ∂⎝ ⎠⎪
⎪∂ ∂ ∂ ∂ ∂⎛ ⎞∂∂ ∂+ = + − =⎨ ⎜ ⎟∂ ∂ ∂ ∂ ∂ ∂ ∂ ∂ ∂ ∂⎝ ⎠
∂ ∂⎛ ⎞∂ ∂ ∂∂ ∂ ∂+ = + − =⎜ ⎟∂ ∂ ∂ ∂ ∂ ∂ ∂ ∂ ∂ ∂⎝ ⎠
⎪
⎪⎪⎪⎪⎩
(2.3)
2.1.1.3. Quan hệ giữa ứng suất và biến dạng - định luật Hooke
Với giả thiết vật thể đồng nhất, đẳng hướng và đàn hồi tuyến tính thì sự quan hệ
giữa ứng suất – biến dạng đựoc biểu thị bằng định luật Hooke tổng quát :
( ) ( )
( ) ( )
( ) ( )
2 11 ;
2 11 ;
2 11 ;
x x y z xy xy
y y z x yz yz
z z x y zx zx
E E
E E
E E
νε σ ν σ σ γ τ
νε σ ν σ σ γ τ
νε σ ν σ σ γ τ
+⎧ ⎡ ⎤= − + =⎪ ⎣ ⎦⎪
+⎪⎡ ⎤= − + =⎨ ⎣ ⎦
⎪⎪ +⎡ ⎤= − + =⎪ ⎣ ⎦⎩
(2.4)
Dạng ma trận và kể thêm biến dạng ban đầu:
{ } [ ]{ } { }TCε σ ε= + (2.5)
với [C] là ma trận các hệ số đàn hồi:
[ ] ( )( )
( )
1 0 0 01 0 0 0
1 0 0 010 0 0 2 1 0 00 0 0 0 2 1 00 0 0 0 0 2 1
CE
ν νν νν ν
νν
ν
− −⎡ ⎤⎢ ⎥− −⎢ ⎥⎢ ⎥− −
= ⎢ ⎥+⎢ ⎥⎢ ⎥+⎢ ⎥
+⎢ ⎥⎣ ⎦
(2.6)
Trong trường hợp biến dạng ban đầu do nhiệt độ:
{ } { }1 1 1 0 0 0 TT Tε α= (2.7)
trong đó: α là hệ số nở vì nhiệt; T là độ biến thiên nhiệt độ.
Dạng biểu diễn ứng suất – biến dạng (dạng nghịch):

Bài giảng FEM
Page 25 / 134
{ } [ ] { } { }( )0Dσ ε ε= − (2.8)
[ ] ( )( )
1 0 0 01 0 0 0
1 0 0 01 20 0 0 0 0 21 1 2
1 20 0 0 0 02
1 20 0 0 0 02
ED
ν ν νν ν νν ν ν
ν
ν νν
ν
−⎡ ⎤⎢ ⎥−⎢ ⎥⎢ ⎥−⎢ ⎥−⎢ ⎥
= ⎢ ⎥+ − ⎢ ⎥−⎢ ⎥⎢ ⎥⎢ ⎥−⎢ ⎥⎣ ⎦
(2.9)
Bài toán 2 chiều – Bài toán phẳng của lý thuyết đàn hồi:
y
x
y
z
z
(a) (b)
Hình 2.2: Bài toán ứng suất phẳng (a) và biến dạng phẳng (b)
a.- Bài toán ứng suất phẳng (xem Hình a):
0z zx zyσ τ τ= = = (2.10)
Định luật Hooke: { } [ ]{ } { }0Cε σ ε= + (2.11)
{ } { } { } [ ]( )
0
1 1 01; ; 1 ; 1 0
0 0 0 2 1
x x
y y
xy xy
T CE
σ ε νσ σ ε ε ε α ν
ντ τ
⎧ ⎫ ⎧ ⎫ −⎡ ⎤⎧ ⎫⎪ ⎪ ⎪ ⎪ ⎪ ⎪ ⎢ ⎥= = = = −⎨ ⎬ ⎨ ⎬ ⎨ ⎬ ⎢ ⎥⎪ ⎪ ⎪ ⎪ ⎪ ⎪ ⎢ ⎥+⎩ ⎭ ⎣ ⎦⎩ ⎭ ⎩ ⎭
(2.12)
Dạng nghịch: { } [ ] { } { }( )0Dσ ε ε= − (2.13)
Biến dạng εz ≠0 và ( )z x y TEνε σ σ α= − + + (2.14)
b.- Bài toán biến dạng phẳng (xem Hình b): w=0 → εz = 0
Ma trận [C] khác đi:

Bài giảng FEM
Page 26 / 134
[ ]( )
{ } ( )0
3 3
1 0 11 1 0 ; 1 1
0 0 2 0C T
E
ν νν ν ν ε ν α
×
− −⎡ ⎤ ⎧ ⎫+ ⎪ ⎪⎢ ⎥= − − = + ⎨ ⎬⎢ ⎥
⎪ ⎪⎢ ⎥⎣ ⎦ ⎩ ⎭
(2.15)
Dạng nghịch: { } [ ] { } { }( ) [ ]{ }0
11
1 20
E TD D ασ ε ε εν
⎧ ⎫⎪ ⎪= − = − ⎨ ⎬− ⎪ ⎪⎩ ⎭
(2.16)
[ ]( )
( ) ( )3 3
1 01 0
1 1 21 20 0
2
EDν ν
ν νν ν
ν×
⎡ ⎤⎢ ⎥−⎢ ⎥
= −⎢ ⎥+ − ⎢ ⎥−⎢ ⎥⎣ ⎦
(2.17)
0zσ ≠ vào ( )z x y E Tσ ν σ σ α= − + − (2.18)
Bài toán 1–D:
Định luật Hooke:
[ ]( )1 hoac: x x x xT E E T D EE
ε σ α σ ε α= + = − = (2.19)
2.1.2. Trình tự phân tích bài toán theo phương pháp PTHH:
Trong phương pháp PTHH – mô hình chuyển vị, thành phần chuyển vị được xem
là đại lượng cần tìm. Chuyển vị được lấy xấp xỉ trong dạng một hàm đơn giản gọi là
hàm xấp xỉ (hay còn gọi là hàm chuyển vị). Trình tự phân tích bài toán theo phương
pháp PTHH – mô hình chuyển vị gồm những bước sau:
2.1.2.1. Rời rạc hoá miền khảo sát:
Miền khảo sát V được chia thành các miền con Ve hay còn gọi là các phần tử có
hình dạng hình học thích hợp. Các PT này được coi là liên kết với nhau tại các nút
nằm tại đỉnh hay biên phần tử. Số nút của PT không lấy tuỳ tiện mà phụ thuộc vào
hàm chuyển vị định chọn.
2.1.2.2. Chọn hàm chuyển vị:
Giả thiết hàm chuyển vị sao cho đơn giản đối với việc tính toán nhưng phải thoả
mãn điều kiện hội tụ. Thường chọn dưới hàm đa thức. Biểu diễn hàm chuyển vị theo

Bài giảng FEM
Page 27 / 134
tập hợp giá trị các thành phần chuyển vị và có thể cả đạo hàm của nó tại các nút của
PT { }eδ
Tập hợp các hàm chuyển vị sẽ xây dựng nên một trường chuyển vị xác định một
trạng thái chuyển vị duy nhất bên trong PT theo các thành phần chuyển vị nút. Từ
trường chuyển vị sẽ xác định một trạng thái biến dạng, trạng thái ứng suất duy nhất
bên trong PT theo các giá trị của thành phần chuyển vị nút của PT.
2.1.2.3. Xây dựng phương trình cân bằng trong từng PT, thiết lập ma trận độ cứng
[ ]eK và vectơ tải tọng nút [ ]e
F của phần tử thứ e:
Dựa vào nguyên lý thế năng dừng toàn phần, xây dựng phương trình cân bằng
trong từng PT, được biểu diễn dưới dạng sau:
[ ] { } [ ]e e eK Fδ = (2.20)
Trong đó: [ ]eF : Véctơ tải trọng nút của PT thứ e xét trong hệ toạ độ riêng
{ }eδ : Véctơ chuyển vị nút của PT thứ e xét trong hệ toạ độ riêng.
[ ]eK : ma trận độ cứng của phần tử thứ e xét trong hệ toạ độ riêng.
2.1.2.4. Ghép nối PT xây dựng phương trình cân bằng toàn hệ:
Trên cơ sở mô hình chuyển vị, ghép nối các phần tử thu được phương trình cân
bằng của toàn hệ, biểu diễn dưới dạng:
[K’].{δ ’} = {F’} (2.21)
Trong đó:
{F’} : Véctơ tải trọng nút của toàn hệ trong hệ toạ độ chung
{δ ’} : Véctơ chuyển vị nút của toàn hệ trong hệ toạ độ chung.
[K’] : ma trận độ cứng của toàn hệ trong hệ toạ độ chung.
Khi ghép nối cần lưu ý xếp đúng vị trí của các thành phần trong từng [ ]eK và [ ]e
F vào
[K’] và {F’}. Lúc này có hiện tượng lặp tại một số nút. Trong hệ phương trình (2.21)
đã khử sự trùng lặp.
Để giải hệ phương trình (2.21) thì định thức của ma trận [K’] cần phải khác 0, tức là
phương trình không suy biến. Với bài toán kết cấu, điều này chỉ đạt được khi điều kiện
biên được thoả mãn ( kết cấu phải bất biến hình). Đó là điều kiện cho trước của một số

Bài giảng FEM
Page 28 / 134
chuyển vị nút nào đó bằng 0 hay bằng một giá trị xác định. Sau khi đưa các điều kiện
biên vào, phương trình cân bằng mới được biểu diễn như sau:
[K*].{δ*} = {F*} (2.22)
Trong đó: {F*} chính là {F’} sau khi loại bỏ các hàng và cột tương ứng với các thành
phần chuyển vị bằng 0.
{δ*} chính là {δ’} sau khi loại bỏ các chuyển vị bằng 0.
[K*] chính là [K’] : sau khi loại bỏ các hàng và cột tương ứng với các thành phần
chuyển vị bằng 0.
2.1.2.5. Giải hệ phương trình cân bằng:
Với bài toán tuyến tính, việc giải hệ phương trình đại số cho kết quả tìm được các
chuyển vị của các nút như sau:
{ } { }1* * *.K Fδ−
⎡ ⎤= ⎣ ⎦ (2.23)
2.1.2.6. Xác định nội lực, ứng suất, biến dạng:
Từ kết quả thu được, kết hợp với các điều kiện biên xác định được véctơ chuyển vị nút
của từng phần tử trong hệ toạ độ riêng, từ đó xác định được nội lực, cũng như biến
dạng, ứng suất của điểm bất kì trong PT nhờ các quan hệ đã có trong CHKC và Lý
thuyết đàn hồi.
2.2. HÀM XẤP XỈ - ĐA THỨC XẤP XỈ - PHÉP NỘI SUY BIỂU DIỄN ĐA THỨC
XẤP XỈ THEO VÉCTƠ BẬC TỰ DO CỦA PHẦN TỬ {qe}
2.2.1. Hàm xấp xỉ - đa thức xấp xỉ:
Một trong những ý tưởng của phương pháp PTHH là xấp xỉ hoá đại lượng cần tìm
trong mỗi miền con Ve. Điều này cho phép thay thế việc tìm nghiệm vốn phức tạp trên
toàn miền V bằng việc tìm nghiệm trong phạm vi mỗi PT ở dạng xấp xỉ đơn giản, vì
vậy, bước quan trọng đầu tiên cần nói đến là chọn hàm xấp xỉ đơn giản mô tả gần đúng
đại lượng cần tìm trong phạm vi mỗi phần tử. Hàm xấp xỉ đơn giản này thường được
chọn dưới dạng hàm đa thức vì những lý do sau:
- Đa thức khi được xem như một tổ hợp tuyến tính của các đơn thức thì tập hợp
các đơn thức thoã mãn yêu cầu độc lập tuyến tính như yêu cầu của Ritz,
Galerkin.

Bài giảng FEM
Page 29 / 134
- Hàm xấp xỉ dạng đa thức thường dễ tính toán, dễ thiết lập công thức khi xây
dụng các phương trình của phương pháp PTHH và tính toán bằng máy tính. Đặc
biệt dễ lấy đạo hàm, tích phân.
- Có khả năng tăng độ chính xác bằng cách tăng số bậc của đa thức ( về mặt lý
thuyết đa thức bậc vô cùng sẽ cho nghiệm chính xác). Tuy nhiên, trong thực tế
ta chỉ lấy các đa thức bậc thấp mà thôi.
Trong phương pháp PTHH- mô hình chuyển vị, hàm xấp xỉ còn gọi là hàm chuyển
vị được nội suy theo giá trị ( hay giá trị các đạo hàm ) của thành phần chuyển vị tại các
nút của PT. Kết quả thu được hàm chuyển vị mà các hệ số của nó được biểu diễn qua
chính giá trị ( hay giá trị các đạo hàm ) của thành phần chuyển vị tại các nút PT. Hàm
chuyển vị đóng vai trò quan trọng trong việc đồng thời đảm bảo mức độ chính xác của
lời giải bài toán cũng như vừa đủ đơn giản trong thuật toán giải.
Khi chọn bậc của hàm chuyển chuyển ( hay bậc của đa thức xấp xỉ) cần lưu ý các
yêu cầu sau:
- Các đa thức xấp xỉ cần thoã mãn điều kiện hội tụ. Đây là yêu cầu quan trọng vì
phương pháp PTHH là một phương pháp số, do đó phải đảm bảo khi kích thước
PT giảm thì kết quả sẽ hội tụ đến nghiệm chính xác.
- Các đa thức xấp xỉ được chọn sao cho không mất tính đẳng hướng hình học.
- Số tham số của đa thức xấp xỉ phải bằng số bậc tự do của PT, tức là bằng số
thành phần chuyển vị nút của PT. Yêu cầu này cho khả năng nội suy đa thức
của hàm xấp xỉ theo giá trị đại lượng cần tìm, tức là theo giá trị các thành phần
chuyển vị tại các điểm nút của PT.
2.2.2. Phép nội suy biểu diễn đa thức xấp xỉ theo vectơ các bậc tự do của phần tử
{qe}
Phép nội suy: Các hệ số ai của đa thức xấp xỉ được biểu diễn qua chính các giá trị
của nó ( hoặc cả các giá trị đạo hàm ) tại các điểm nút trên phần tử ⇒ ta nói rằng:
Hàm xấp xỉ được nội suy theo giá trị ( đạo hàm ) của nó tại các nút.
Trường hợp 1: Xét PT thanh lăng trụ i-k là thanh thẳng chịu kéo- nén dọc trục, có 2
nút tại 2 đầu thanh. Thanh có đọ dài l, có độ cứng EF không đổi.

Bài giảng FEM
Page 30 / 134
l
ui uk
ki
y
x
Hình 2.3.
Hệ trục xy với trục x trùng trục thanh trục y vuông góc với trục thanh, gốc tại i.
Đây là bài toán 1- D. Mọi điểm trong thanh chỉ tồn tại chuyển vị dọc trục u(x). PT
có 2 bậc tự do là 2 thành phần chuyển vị dọc trục của 2 điểm nút, vec tơ chuyển vị nút
của PT có dạng:
{ } ie
k
uu
δ⎧ ⎫
= ⎨ ⎬⎩ ⎭
(2.24)
Trong hàm chuyển vị sẽ có 2 tham số a. Do đó, chọn hàm chuyển vị là đa thức bậc
một có dạng sau:
( ) 1 2xu a a x= + ( )0 x l≤ ≤ (2.25)
Viết dưới dạng ma trận:
{ } ( ){ }xu u= = [1 x ] 1
2
aa
⎧ ⎫⎨ ⎬⎩ ⎭
= ( ) { }xP a⎡ ⎤⎣ ⎦ (2.26)
Trong đó:
[P(x)] – ma trận các đơn thức
{a}- véc tơ các tham số.
{u}- vectơ các hàm chuyển vị tại một điểm bất kì.
Gán các toạ độ của điểm nút vào hàm chuyển vị và buộc các giá trị hàm chuyển vị
tại các điểm nút đồng nhất với giá trị các chuyển vị nút:
{ }( )( )
[ ][ ]
{ } [ ]{ }1 1
2 2 2
0 ( )1 01 ( )
iie
k k
u x P xu a aa A a
u a a l l au x l P xδ
⎧ ⎫ ⎡ ⎤=⎧ ⎫ ⎧ ⎫ ⎧ ⎫⎡ ⎤⎪ ⎪= = = = = =⎢ ⎥⎨ ⎬ ⎨ ⎬ ⎨ ⎬ ⎨ ⎬⎢ ⎥+= ⎣ ⎦⎩ ⎭ ⎩ ⎭⎩ ⎭ ⎢ ⎥⎪ ⎪⎩ ⎭ ⎣ ⎦ (2.27)
Trong đó: [A]- là ma trận chỉ chứa tọa độ các điểm nút PT.

Bài giảng FEM
Page 31 / 134
Suy ra:{ } [ ] { }1
ea A δ−= (2.28)
Thay (2.28) vào (2.26), thu được:
{ } ( ) [ ] { }1xe
u P A δ−⎡ ⎤= ⎣ ⎦ (2.29)
Đặt : [ ] ( ) [ ] 1N P x A −⎡ ⎤= ⎣ ⎦ (2.30)
Ta có { } [ ]{ }eu N δ= (2.31)
Trong đó: [N] - gọi là ma trận hàm dạng, chứa các toạ độ của các điểm nút của PT
và các biến của điểm bất kì đang xét.
Trong trường hợp cụ thể này, ta thấy:
[ ] 11 0
1 1Al l
−⎡ ⎤⎢ ⎥=⎢ ⎥−⎣ ⎦
(2.32)
Theo (2.30), ma trận hàm dạng sẽ thu được:
[ ] ( ) [ ] [ ] ( ) ( )11 2
1 01 11 1
x xN P x A x N x N xl l
l l
−⎡ ⎤
⎡ ⎤⎛ ⎞⎢ ⎥⎡ ⎤ ⎡ ⎤= = = − =⎜ ⎟⎢ ⎥⎣ ⎦ ⎣ ⎦⎢ ⎥− ⎝ ⎠⎣ ⎦⎣ ⎦
(2.33)
Theo (2.31), biểu diễn hàm chuyển vị theo các chuyển vị nút của PT:
{ } ( ){ } [ ]{ }x 1 ie
k
ux xu u Nul l
δ⎧ ⎫⎡ ⎤⎛ ⎞= = = − ⎨ ⎬⎜ ⎟⎢ ⎥⎝ ⎠⎣ ⎦ ⎩ ⎭
(2.34)
Các hàm ( )1 1 xN xl
⎛ ⎞= −⎜ ⎟⎝ ⎠
và ( )2xN xl
= có tên là các hàm nội suy Lagrange bậc 1.
Đồ thị phân bố của chuyển vị và Ni(x):
x
u
1 1
1N =1-xL 2N = x
L
x
u
qq1N q
2N q1 2
1
2
1u =N q + N q1e 2 2

Bài giảng FEM
Page 32 / 134
Hình 2.4.
2.3. CÁC PHƯƠNG TRÌNH CƠ BẢN
2.3.1. Chuyển vị, biến dạng, ứng suất trong phân tử- ma trận độ cứng phần từ,
véc tơ tải phần tử
Cần thiết lập biểu thức tính biến dạng và ứng suất tại một điểm bất kì trong PT
thông qua ẩn cơ bản là chuyển vị nút PT { }eδ . Sử dụng các công thức trong Lý thuyết
đàn hồi. Theo (2.1) quan hệ giữa biến dạng và chuyển vị:
{ } [ ]{ }uε = ∇ (2.35)
Thay (2.31) vào (2.35) thu được:
{ } [ ][ ]{ } [ ]{ }e eN Bε δ δ= ∇ = (2.36)
Trong đó: [ ] [ ][ ]B N= ∇ (2.37)
[ ]B - ma trận chứa đạo hàm của hàm dạng.
Theo (2.8) quan hệ giữa ứng suất và biến dạng
{ } [ ] { }.Dδ ε= (2.38)
Thay (2.36) vào (2.38), thu đựơc
Do đó: { } [ ] [ ] { }. .e
D Bδ δ= (2.39)
Xét trường hợp phần tử chịu tải trọng tập trung tại nút { }nPe ứng với chuyển vị nút
{ }eδ và chịu tải trọng phân bố trên bề mặt phần tử có cường độ tại điểm M bất kì là :
{ } x
y
δδ
δ⎧ ⎫⎪ ⎪= ⎨ ⎬⎪ ⎪⎩ ⎭
(2.40)
Thiết lập biểu thức tính thế năng toàn phần eΠ của phần tử theo công khả dĩ của
ngoại lực We và thế năng biến dạng eU của PT đó.
We e eUΠ = − (2.41)
Theo (1.45), công khả dĩ ngoại lực We ( không xét lực thể tích ) được tính :

Bài giảng FEM
Page 33 / 134
{ } { } { } { }W T Te ne e
S
P u q dsδ= + ∫ (2.42)
Từ (2.31)ta có:
{ } [ ]{ } { } [ ]{ }( ) { } [ ]TT T T
e e eu N u N Nδ δ δ= ⇒ = = (2.43)
Thay vào biểu thức tính công khả dĩ ngoại lực We trên, thu được:
{ } { } { } [ ] { }W T T Te ne e e
S
P N q dSδ δ= + ∫ (2.44)
Theo (1.46) thế năng biến dạng eU của PT được tính:
eU = { } { }12
T
V
dVε σ∫ (2.45)
Thay (2.36) và (2.39) vào biểu thức tính thế năng biến dạng eU của PT, ta có:
{ } [ ] [ ] [ ] { }1 . .2
T Te e e
V
U B D B dVδ δ⎛ ⎞
= ⎜ ⎟⎝ ⎠∫ (2.46)
Thay (2.44) và (2.45) vào (2.43) thu được thế năng toàn phần của phần tử:
{ } [ ] [ ] [ ] { }
{ } { } { } [ ] { }
1W . .2
T Te e e e e
V
T T Tne e e
S
U B D B dV
P N q dS
δ δ
δ δ
⎛ ⎞Π = − = ⎜ ⎟
⎝ ⎠⎛ ⎞
− +⎜ ⎟⎝ ⎠
∫
∫ (2.47)
Đặt [ ] [ ] [ ] [ ]. .T
eV
K B D B dV= ∫ (2.48)
[ ]eK gọi là ma trận độ cứng của phần tử.
Vì [ ]D là ma trận đối xứng nên tích [ ] [ ] [ ].TB D B cũng đối xứng và do đó [ ]eK là
ma trận đối xứng.
Đặt { } { } [ ] { } { } { }Tn n qe e e e
S
F P N q dS P P= + = +∫
(2.49)

Bài giảng FEM
Page 34 / 134
Với { } [ ] { }Tq e
S
P N q dS= ∫ (2.50)
[ ]eF gọi là vectơ tải trọng nút của PT, được xây dựng bởi ngoại lực đặt tại nút của
phần tử [ ]n eP và ngoại lực trong PT quy về nút q e
P⎡ ⎤⎣ ⎦
từ đó ta có { } [ ] { } { } [ ]1 .2
T Te e e e e e
K Fδ δ δΠ = − (2.51)
Theo nguyên lý dừng thế năng toàn phần, điều kiện cân bằng của PT tại các điểm
nút:
{ }0 0e
ee
δ∂Π
∂Π = ⇒ =∂
(2.52)
Tiến hành lấy đạo hàm riêng lần lượt với từng chuyển vị nút và cho bằng 0, thu
được m phương trình ( cho PT có m chuyển vị nút):
{ }
1
2 0...
e
ee
e
e
m
δ
δδ
δ
∂Π⎧ ⎫⎪ ⎪∂⎪ ⎪
∂Π⎪ ⎪∂Π ⎪ ⎪∂= =⎨ ⎬∂ ⎪ ⎪
⎪ ⎪∂Π⎪ ⎪
⎪ ⎪∂⎩ ⎭
(2.53)
Thay eΠ trong (2.51) vào (2.53) ta được
[ ] { } { } 0e e e
K Fδ − = (2.54)
Suy ra [ ] { } { }e e eK Fδ = (2.55)
2.3.2. Phép chuyển trục toạ độ
Các đại lượng chuyển vị, biến dạng, ứng suất và ma trận hàm dạng [N], ma trận độ
cứng [K], vectơ tải trọng nút {F}e của PT e được xây dựng trong hệ toạ độ thích hợp
của mỗi PT. Hệ toạ độ này thường được chọn sao cho việc thiết lập các công thức cần
có đơn giản và được gọi là hệ toạ độ địa phương, hay còn gọi là hệ toạ độ riêng (HTĐ
PT). Khi một PT đang được tính toán trong HTĐ PT thì phương của các bậc tự do của
PT cũng được lấy theo HTĐ PT này.

Bài giảng FEM
Page 35 / 134
Thực tế, hệ kết cấu thường có các PT khác nhau về HTĐ PT, do đó các bậc tự do của
các PT cũng khác nhau về phương. Để ghép nối các PT trong một hệ kêt cấu với nhau,
cần thiết lập một hệ toạ độ tổng thể của hệ kết cấu, hay còn gọi là hệ toạ độ chung
(HTĐ KC). Do đó phải chuyển đổi các đại lượng từ các HTĐ PT về HTĐ KC.
Gọi HTĐ PT là xyz và HTĐ KC là x’y’z’. Trong HTĐ PT xyz với PT thứ e : {F}e ,
[K]e, {δ}e lần lượt là vectơ tải trọng nút, ma trận độ cứng và vectơ chuyển vị nút PT.
Trong HTĐ KC x’y’z’ với PT thứ e : {F’}e , [K’]e, {δ'}e lần lượt là vectơ tải trọng nút,
ma trận độ cứng và vectơ chuyển vị nút PT.
Thiết lập mối quan hệ giữa {δ}e và {δ'}e
{δ}e = [T]e. {δ'}e (2.56)
Trong đó : [T]e là ma trận chuyển đổi các thành phần chuyển vị nút từ hệ toạ độ chung
x’y’z’ về hệ toạ độ riêng xyz. ( gọi tắt là ma trận biến đổi toạ độ hay ma trận chuyển
tọa độ).
Vì véctơ tải trọng nút {F}e phù hợp về thứ tự, phương và dấu với vectơ chuyển vị nút
{δ}e nên có thể viết :
{F}e = [T]e. {F'}e (2.57)
Với vectơ chuyển vị nút trong HTĐ PT thì thế năng biến dạng toàn phần của PT e
sẽ là :
{ } [ ] { } { } [ ]1 .2
T Te e e e e e
K Fδ δ δΠ = − (2.58)
Thay (2.56), (2.57) vào (2.58), thu được :
{ } [ ] [ ] [ ] { } { } [ ] [ ] [ ]1 . ' . . . . ' ' . . .2
T T T Te e e e e e e e e e
T K T T F Tδ δ δΠ = − (2.59)
Với vectơ chuyển vị nút trong HTĐ KC, theo (2.51) thế năng biến dạng toàn phần của
PT e sẽ được biểu diễn :
{ } [ ] { } { } [ ]1 ' . ' . ' ' . '2
T Te e e e e e
K Fδ δ δΠ = − (2.60)
So sánh (2.59) và (2.60), ta có :
[ ] [ ] [ ] [ ]' . .T
e e e eK T K T= (2.61)

Bài giảng FEM
Page 36 / 134
[ ] [ ] [ ].T
e eT T E= (2.62)
Với [ ]E : là ma trận đơn vị.
Khi [ ]eT là ma trận vuông có tính chất trực giao (vì ma trận vuông A = (aij) cấp n với
các phần tử là những số thực thỏa mãn các cột tạo nên một hệ vectơ trực chuẩn), vì
thế:
[ ] [ ] 1T T
e eT −= (2.63)
Thay (2.63) vào (2.57) và biến đổi ta được
{ } [ ] { }' .T
e e eF T F= (2.64)
2.3.2.1. Ma trận biến đổi toạ độ [ ]eT của PT thanh đầu nút cứng
Xét phân tử thanh i-k trong bài toán phẳng, 2 đầu nút cứng bị biến dạng và chuyển
tới vị trí i’-k’. Hệ toạ độ riêng của PT là xy, trong đó trục x trùng trục thanh.. Hệ toạ
độ chung của kết cấu là x’y’ có phương lập với HTĐ PT một góc α . Góc α là dương
khi trục HTĐ KC xoay tới trục của HTĐ PT cùng tên theo chiều ngược kim đồng hồ.
φ = φk k'
y'
'
ki
yx
x
i'
k'
vkv'k
viv'i
u'i u'k
α
φ = φi i'
Hình 2.5.
Vectơ chuyển vị nút của PT trong HTĐ PT :
{ } { }Ti i i k k ke
u v u vδ ϕ ϕ=
Vec tơ chuyển vị nút của PT trong HTĐ KC :

Bài giảng FEM
Page 37 / 134
{ } { }' ' ' ' ' ' ' Ti i i k k ke
u v u vδ ϕ ϕ=
Xét quan hệ chuyển vị nút tại đầu i giữa HTĐ KC của két cấu và HTĐ PT của PT :
'
' os ' sin' sin ' os
i i i
i i i
i i
u u c vv u v c
α αα α
ϕ ϕ
⎧ = +⎪
= − +⎨⎪ =⎩
Viết dưới dạng ma trận :
[ ]{ }''cos sin 0
sin os 0 '0 0 1 '
i i
i i i i
i i
u uv c v L
α αα α δ
ϕ ϕ
⎧ ⎫ ⎧ ⎫⎡ ⎤⎪ ⎪ ⎪ ⎪⎢ ⎥= − =⎨ ⎬ ⎨ ⎬⎢ ⎥⎪ ⎪ ⎪ ⎪⎢ ⎥⎣ ⎦⎩ ⎭ ⎩ ⎭
Trong đó : [ ]iL - là ma trận biến đổi vec tơ chuyển vị tại nút i (liên kết ngàm ) từ
HTĐ KC sang HTĐ PT.
[ ]cos sin 0
sin os 00 0 1
iL cα α
α α⎡ ⎤⎢ ⎥= −⎢ ⎥⎢ ⎥⎣ ⎦
Tại đầu k xét tương tự, ta có:
[ ]cos sin 0
sin os 00 0 1
kL cα α
α α⎡ ⎤⎢ ⎥= −⎢ ⎥⎢ ⎥⎣ ⎦
Xét với cả PT i-k quan hệ giữa { }eδ và { }' e
δ được biểu diễn :
[ ] [ ][ ] [ ]
'cos sin 0 0 0 0'sin cos 0 0 0 0
0 '0 0 1 0 0 00 0 0 cos sin 0 '00 0 0 sin cos 0 '0 0 0 0 0 1 '
i i
i i
ii i
k kk
k k
k k
u uv v
Lu uLv v
α αα α
ϕ ϕα αα α
ϕ ϕ
⎧ ⎫ ⎧ ⎫⎡ ⎤⎪ ⎪ ⎪ ⎪⎢ ⎥−⎪ ⎪ ⎪ ⎪⎢ ⎥⎪ ⎪ ⎪ ⎪⎡ ⎤ ⎢ ⎥⎪ ⎪ ⎪ ⎪= =⎢ ⎥⎨ ⎬ ⎢ ⎥ ⎨ ⎬
⎢ ⎥⎪ ⎪ ⎢ ⎥ ⎪ ⎪⎣ ⎦⎪ ⎪ ⎢ ⎥ ⎪ ⎪−⎪ ⎪ ⎢ ⎥ ⎪ ⎪⎪ ⎪ ⎪ ⎪⎣ ⎦⎩ ⎭ ⎩ ⎭
Suy ra ma trận biến đổi toạ độ [ ]eT của PT thanh 2 đầu ngàm:

Bài giảng FEM
Page 38 / 134
[ ]
cos sin 0 0 0 0sin cos 0 0 0 00 0 1 0 0 00 0 0 cos sin 00 0 0 sin cos 00 0 0 0 0 1
eT
α αα α
α αα α
⎡ ⎤⎢ ⎥−⎢ ⎥⎢ ⎥
= ⎢ ⎥⎢ ⎥⎢ ⎥−⎢ ⎥⎣ ⎦
(2.65)
Trong đó: ( ) ( )
' ' ' '
2 2' ' ' '
cos ;sink i k i
k i k i
x x y yc sl l
l x x y y
α − −= = = =
= − + −
(2.66)
2.3.2.2. Ma trận biến đổi tạo độ [ ]eT của PT thanh đầu i nút cứng đầu k khớp
x'
y'
αk
i
y x
Hình 2.6.
Vec tơ chuyển vị nút của PT trong HTĐ PT:
{ } { }Ti i i k k ke
u v u vδ ϕ ϕ=
Vec tơ chuyển vị nút của PT trong HTĐ KC
{ } { }' ' ' ' ' ' ' Ti i i k k ke
u v u vδ ϕ ϕ=
Tương tự tại đầu nút cứng i và đầu khớp k ta có :
[ ]cos sin 0
sin os 00 0 1
iL cα α
α α⎡ ⎤⎢ ⎥= −⎢ ⎥⎢ ⎥⎣ ⎦
;
[ ] cos sinsin oskL
cα α
α α⎡ ⎤
= ⎢ ⎥−⎣ ⎦
Suy ra ma trận biến đổi toạ độ của [ ]eT thanh đầu ngàm đầu khớp:

Bài giảng FEM
Page 39 / 134
[ ]
os sin 0 0 0sin cos 0 0 00 0 1 0 00 0 0 cos sin0 0 0 sin cos
e
c
T
α αα α
α αα α
⎡ ⎤⎢ ⎥−⎢ ⎥⎢ ⎥=⎢ ⎥⎢ ⎥⎢ ⎥−⎣ ⎦
(2.67)
2.3.2.3. Ma trận biến đổi toạ độ [ ]eT của PT thanh đầu i khớp đầu k nút cứng
x'
y'
αk
i
y x
Hình 2.7.
Vec tơ chuyển vị nút của PT trong HTĐ PT:
{ } { }Ti i k k ke
u v u vδ ϕ=
Vec tơ chuyển vị nút của PT trong HTĐ KC
{ } { }' ' ' ' ' ' Ti i k k ke
u v u vδ ϕ=
Ngược lại với trường hợp trên, tại đầu khớp i và đầu nút cứng k, ta có:
[ ] cos sinsin osiL
cα α
α α⎡ ⎤
= ⎢ ⎥−⎣ ⎦;
[ ]cos sin 0
sin os 00 0 1
kL cα α
α α⎡ ⎤⎢ ⎥= −⎢ ⎥⎢ ⎥⎣ ⎦
Suy ra ma trận biến đổi toạ độ [ ]eT của phần tử thanh đầu khớp đầu ngàm:

Bài giảng FEM
Page 40 / 134
[ ]
os sin 0 0 0sin cos 0 0 00 0 cos sin 00 0 sin cos 00 0 0 0 1
e
c
T
α αα α
α αα α
⎡ ⎤⎢ ⎥−⎢ ⎥⎢ ⎥=⎢ ⎥−⎢ ⎥⎢ ⎥⎣ ⎦
(2.68)
2.3.2.4. Ma trận biến đổi toạ độ [ ]eT của PT thanh 2 đầu khớp
x'
y'
αk
i
y x
Hình 2.8.
Tương tự , tại 2 đầu khớp i và k ma trận biến đổi vec tơ chuyển vị nút khớp:
[ ] cos sinsin osiL
cα α
α α⎡ ⎤
= ⎢ ⎥−⎣ ⎦;
[ ] cos sinsin oskL
cα α
α α⎡ ⎤
= ⎢ ⎥−⎣ ⎦
Suy ra ma trận biến đổi toạ độ [ ]eT của PT thanh 2 đầu khớp:
[ ]
os sin 0 0sin cos 0 00 0 cos sin0 0 sin cos
e
c
T
α αα α
α αα α
⎡ ⎤⎢ ⎥−⎢ ⎥=⎢ ⎥⎢ ⎥−⎣ ⎦
(2.69)
2.3.3. Ghép nối phần tử- ma trận cứng tổng thể- vectơ tải tổng thể
Giả sử hệ kết cấu được rời rạc hoá thành m PT. Theo (3.40) ta viết được m phương
trình cân bằng cho tất cả m PT trong hệ toạ độ riêng của từng PT. Sauk hi chuyển về
HTĐ KC của toàn kết cấu, tiến tới gộp các phương trình cân bằng của từng PT trong
cả hệ, thu được phương trình cân bằng cho toàn hệ kết cấu trong HTĐ KC:
[ ]{ } { }' ' 'K Fδ = (2.70)

Bài giảng FEM
Page 41 / 134
Do thứ tự các thành phần trong vectơ chuyển vị nút { }' eδ của từng PT khác với thứ
tự trong vec tơ chuyển vị nút { }'δ của toàn hệ kết cấu, nên cần lưu ý xếp đúng vị trí
của từng thành phần trong [ ]' eK và { }' e
F vào [ ]'K và { }'F . Việc xếp này thường được
áp dụng phương pháp số mã, hay sử dụng ma trận định vị PT [ ]eH để thiết lập các ma
trận tổng thể và vectơ tải trọng nút tổng thể của toàn hệ kết cấu.
2.3.3.1. Áp dụng ma trận định vị PT [ ]eH
Giả sử hệ kết cấu được rời rạc hoá thành m PT. Số bậc tự do của toàn hệ là n. Vec
tơ chuyển vị nút tổng thể có dạng
{ } { }' ' '1 2' ....
T
nδ δ δ δ= (2.71)
Với PT thứ e, số bậc tự do là en , có vectơ chuyển vị nút trong HTĐ KC là { }' eδ . Các
thành phần của { }' eδ nằm trong số các thành phần của { }'δ . Do đó có sự biểu diễn
quan hệ giữa 2 vectơ này như sau:
{ } [ ] { }' * 'e e
Hδ δ= (2.72)
( ) ( ) ( )1 1e en n n n× × ×
Trong đó: [ ]eH - ma trận định vị của PT e, nó cho thấy hình ảnh sắp xếp các thành
phần của vec tơ { }' eδ trong { }'δ .
Dựa vào (2.60) ta xác định được thế năng toàn phần cho từng PT. Thay (2.72) vào
(2.60), sau đó cộng gộp của m PT, xác định được thế năng toàn phần của hệ:
{ } [ ] [ ] [ ] { } { } [ ] { }1
1 . ' . . ' . . ' ' . . '2
mT T T T
e e e e ee
H K H H Fδ δ δ=
⎡ ⎤Π = −⎢ ⎥⎣ ⎦∑ (2.73)
Biểu thức (2.73) biểu diễn thế năng toàn phần của hệ theo vectơ chuyển vị nút tổng thể
{ }'δ . Áp dụng nguyên lý thế năng dừng toàn phần sẽ có điều kiện cân bằng của toàn
hệ tại điểm nút:

Bài giảng FEM
Page 42 / 134
{ }
1
2
'
' 0'
...
'm
δ
δδ
δ
∂Π⎧ ⎫⎪ ⎪∂⎪ ⎪
∂Π⎪ ⎪∂Π ⎪ ⎪∂= =⎨ ⎬∂ ⎪ ⎪
⎪ ⎪∂Π⎪ ⎪
⎪ ⎪∂⎩ ⎭
(2.74)
Áp dụng phép lấy đạo hàm riêng đối với ma trận thu được:
[ ] [ ] [ ] { } [ ] { } { }1 1
. ' . ' . ' 0m m
T T
e e e e ee e
H K H H Fδ= =
⎛ ⎞− =⎜ ⎟
⎝ ⎠∑ ∑ (2.75)
Nhận thấy đây chính là phương trình cân bằng cho toàn hệ. So sánh với (2.70), thu
được:
[ ] [ ] [ ] [ ]1
' . ' .m
T
e e ee
K H K H=
= ∑ : là ma trận độ cứng tổng thể (2.76)
{ } [ ] { }1
' . 'm
T
e ee
F H F=
= ∑ : là vec tơ tải trọng nút tổng thể (2.77)
Việc sử dụng ma trận định vị [ ]eH trong (2.76) và (2.77) để tính ma trận độ cứng
[ ]'K và vec tơ tải trọng nút { }'F thực chất là xắp xếp các thành phần của ma trận độ
cứng phần tử [ ]' eK và vectơ tải trọng nút của phần tử { }' e
F vào vị trí của nó trong ma
trận đọ cứng tổng thể [ ]'K và vectơ tải trọng nút tổng thể { }'F . Tuy nhiên trong thực
tế người ta hay sử dụng phương pháp số mã.
2.3.3.2. Áp dụng phương pháp số mã
Khi áp dựng phương pháp số mã mỗi thành phần trong vectơ chuyển vị nút và
trong vectơ tải trọng nút tương ứng được dùng 2 mã số để dặt tên :
- Số mã cục bộ là số mã từ 1 đến en ( với en là số bậc tự do của PT e). Đây chính
là thứ tự sắp xếp trong vec tơ { }' eδ và { }' e
F của PT e.
- Số mã toàn thể là số mã từ 1 đến n ( với n là số bậc tự do của hệ ). Đó chính là
thứ tự sắp xếp trong vec tơ { }'δ và { }'F của toàn hệ kết cấu.

Bài giảng FEM
Page 43 / 134
Mỗi thành phần của [ ]' eK và { }' e
F tương ứng với một số mã cục bộ của chuyển vị
nút cụ thể. Căn cứ vào số mã toàn thể của chuyển vị nút cụ thể này mà sắp xếp vị trí
của thành phần [ ]' eK và { }' e
F vào đúng vị trí trong ma trận [ ]'K và vec tơ { }'F của
toàn hệ kết cấu.
Ví dụ 2.1 : Thiết lập ma trận độ cứng tổng thể [ ]'K và vec tơ tải trọng nút { }'F của
toàn hệ kết cấu của hệ trên hình 2.10.
(1,2)
1 2
3
(3,4,5) (6,7)
(8,9)
Hình 2.9.
Lập bảng số mã
Phần tử Số mã cục bộ
1 2 3 4 5 6 TT Loại α
Số mã toàn thể
1
0 1 2 3 4 5 0
2 0 3 4 5 6 7 0
3 090− 3 4 8 9 0 0
Với mỗi PT, lập ma trận độ cứng [ ]' eK và vectơ tải trọng nút { }' e
F trong HTĐ KC :

Bài giảng FEM
Page 44 / 134
[ ]( )
11
21 22
31 32 331
41 42 43 44
51 52 53 54 55
1 2 3 4 51 12 2
' 3 34 45 5
1 2 3 4 5
CBaa a dx
K a a aa a a aa a a a a
TT
⎡ ⎤⎢ ⎥⎢ ⎥⎢ ⎥=⎢ ⎥⎢ ⎥⎢ ⎥⎣ ⎦
; { }
1
2
31
4
5
12
' 345
dd
F ddd
⎧ ⎫⎪ ⎪⎪ ⎪⎪ ⎪= ⎨ ⎬⎪ ⎪⎪ ⎪⎪ ⎪⎩ ⎭
[ ]( )
11
21 22
31 32 332
41 42 43 44
51 52 53 54 55
1 2 3 4 51 32 4
' 3 54 65 7
3 4 5 6 7
CBbb b dx
K b b bb b b bb b b b b
TT
⎡ ⎤⎢ ⎥⎢ ⎥⎢ ⎥=⎢ ⎥⎢ ⎥⎢ ⎥⎣ ⎦
; { }
1
2
31
4
5
34
' 567
ee
F eee
⎧ ⎫⎪ ⎪⎪ ⎪⎪ ⎪= ⎨ ⎬⎪ ⎪⎪ ⎪⎪ ⎪⎩ ⎭
[ ] ( )11
21 223
31 32 33
41 42 43 44
1 2 3 41 32 4
'3 84 9
3 4 8 9
CBcc c dx
Kc c cc c c c
TT
⎡ ⎤⎢ ⎥⎢ ⎥=⎢ ⎥⎢ ⎥⎣ ⎦
; { }
1
21
3
4
34
'89
ff
Fff
⎧ ⎫⎪ ⎪⎪ ⎪= ⎨ ⎬⎪ ⎪⎪ ⎪⎩ ⎭
Căn cứ vào bảng số mã, với mỗi thành phần của ma trận [ ]' eK và vectơ { }' e
F được
sắp xếp vào ma trận độ cứng [ ]'K và vectơ tải trọng nút { }'F của toàn hệ.
[ ]
( )( ) ( )( ) ( ) ( )
11
21 22
31 32 33 11 11
41 42 43 21 21 44 22 22
51 52 53 31 31 54 32 55 33
41 42 43 44
51 52 53 54 55
31 32 33
41 42 43 44
1234
' 56789
1 2 3 4 5 6 7 8 9
aa aa a a b ca a a b c a b c
K a a a b c a b a bb b b bb b b b bc c cc c c c
⎡ ⎤⎢ ⎥⎢ ⎥⎢ ⎥+ +⎢ ⎥+ + + +⎢ ⎥⎢ ⎥= + + + +⎢ ⎥⎢ ⎥⎢ ⎥⎢ ⎥⎢ ⎥⎢ ⎥⎣ ⎦
{ } ( ) ( ) ( ){ }1 2 3 1 1 4 2 2 5 3 4 5 3 4'T
F d d d e f d e f d e e e f f= + + + + +

Bài giảng FEM
Page 45 / 134
Ví dụ 2.2 Một kết cấu được chia ra 8 phần tử tam giác như Hình 3.1. Mỗi phần tử
có 3 nút; mỗi nút có 1 bậc tự do.
Mô tả quá trình ghép nối ma trận độ cứng chung K với giả sử chỉ xét 3 phần tử đầu
tiên: 1, 2 và 3 với các ma trận độ cứng đã biết như sau:
⎥⎥⎥
⎦
⎤
⎢⎢⎢
⎣
⎡=
521263137
1k ; ⎥⎥⎥
⎦
⎤
⎢⎢⎢
⎣
⎡=
432371218
2k ; ⎥⎥⎥
⎦
⎤
⎢⎢⎢
⎣
⎡=
501064149
3k
Lời giải
1. Xây dựng bảng ghép nối phần tử (đường đến các nút ngược chiều kim đồng hồ)
Bậc tự do
Phần tử 1 2 3
1 1 2 4
2 4 2 5
3 2 3 5
2. Xét từng phần tử
Với phần tử 1, các dòng và cột được nhận dạng như sau:
421
521263137421
1
⎥⎥⎥
⎦
⎤
⎢⎢⎢
⎣
⎡=k
Ma trận này được cộng vào ma trận độ cứng chung và ta sẽ được:
1 2 3
5 4 6
7 8 9
1 2
3 4
5 6
7 8
e
1 2
3
Hình 2.10

Bài giảng FEM
Page 46 / 134
54321
000000502100000020630103754321
⎥⎥⎥⎥⎥⎥⎥⎥
⎥
⎤
⎢⎢⎢⎢⎢⎢⎢⎢
⎢
⎡
=K
Ma trận độ cứng của phần tử 2 được gán số bởi:
524
432371218524
2
⎥⎥⎥
⎦
⎤
⎢⎢⎢
⎣
⎡=k
Các số hạng của ma trận k2 được cộng thêm vào ma trận chung, cho ta
54321
4203028501210000031207630103754321
⎥⎥⎥⎥⎥⎥⎥⎥
⎥
⎤
⎢⎢⎢⎢⎢⎢⎢⎢
⎢
⎡
++
++
=K
Với phần tử 3:
532
501064149532
3
⎥⎥⎥
⎦
⎤
⎢⎢⎢
⎣
⎡=k
Các số hạng của ma trận k3 được cộng tiếp vào ma trận chung ở trên, cho ta
54321
54200130213031
00064013349133
0103754321
⎥⎥⎥⎥⎥⎥⎥⎥
⎥
⎤
⎢⎢⎢⎢⎢⎢⎢⎢
⎢
⎡
+++
+++
=K
Việc cộng các véctơ lực phần tử vào véctơ lực chung được tiến hành hoàn toàn
tương tự.

Bài giảng FEM
Page 47 / 134
2.3.4. Áp đặt điều kiện biên
Để giải được hệ phương trình [ ]'K { }'δ ={ }'F , cần phải có định thức của trận [ ]'K
khác 0 ( det [ ]'K khác 0 ), khi đó phương trình không suy biến. Với bài toàn kết cấu,
điều này chỉ đạt được khi điều kiện biên được thoã mãn (kết cấu phải bất biến hình ).
Đó là điều kiện cho trước một số chuyển vị nút nào đó bằng 0 hay bằng một giá trị xác
định. Sau khi áp đạt điều kiện biên vào, phương rình cân bằng của toàn hệ kết cấu
trong HTĐ KC có dạng :
[ ]*K { }*δ ={ }*F (2.78)
Đưa các điều kiện biên vào cần chú ý 2 trường hợp sau :
Trường hợp 1 : Thành phần chuyển vị tại một nút của PT bằng 0 do tương ứng với
các thành phần chuyển vị này là các liên kết với đất ( thí dụ chuyển vị nút 1,2,6,7,8,9
trong ví dụ trên đều bằng 0), ta xử lý bằng cách :
- Không cho số mã của chuyển vị nút đó, hay ghi 0. Việc đánh số mã toàn thể của
chuyển vị nút theo thứ tự và vectơ chuyển vị nút của toàn hệ chỉ bao gồm các
chuyển vị nút còn lại.
- Khi lập ma trận [ ]' eK và vectơ { }' e
F của từng PT, các hàng và cột tương ứng
với số mã chuyển vị nút bằng không đều ghi số 0. Và khi thiết lập ma trận độ
cứng tổng thể [ ]'K và vectơ tải trọng nút tổng thể{ }'F ta loại bỏ hàng, cột tương
ứng với số mã chuyển vị nút bằng không.
Ví dụ 2.3: Thiết lập ma trận độ cứng tổng thể [ ]'K và vectơ tải trọng nút { }'F của
toàn hệ kết cấu cảu hệ trong ví dụ 2.1 ( có xét tới điều kiện biên)
(0,0)
1 2
3
(1,2,3) (0,0)
(0,0)
Hình 2.11
Lập bảng số mã khi xét tới điều kiện biên

Bài giảng FEM
Page 48 / 134
Phần tử Số mã cục bộ
TT 1 2 3 4 5 6
Loại α
số mã toàn thể
1
0 0 0 1 2 3 0
2 0 1 2 3 0 0 0
3 090− 1 2 0 0 0 0
Lập ma trận độ cứng [ ]' eK và vectơ tải trọng nút { }' e
F của từng PT trong HTĐ KC :
[ ]( )
11
21 22
31 32 331
41 42 43 44
51 52 53 54 55
1 2 3 4 51 02 0
' 3 14 25 3
0 0 1 2 3
CBaa a dx
K a a aa a a aa a a a a
TT
⎡ ⎤⎢ ⎥⎢ ⎥⎢ ⎥=⎢ ⎥⎢ ⎥⎢ ⎥⎣ ⎦
; { } 31
4
5
0 00 0
' 123
F ddd
⎧ ⎫⎪ ⎪⎪ ⎪⎪ ⎪= ⎨ ⎬⎪ ⎪⎪ ⎪⎪ ⎪⎩ ⎭
[ ]( )
11
21 22
31 32 332
1 2 3 4 51 12 2
' 3 34 0 0 0 0 05 0 0 0 0 0 0
1 2 3 0 0
CBbb b dx
K b b b
TT
⎡ ⎤⎢ ⎥⎢ ⎥⎢ ⎥=⎢ ⎥⎢ ⎥⎢ ⎥⎣ ⎦
; { }
1
2
31
12
' 30 00 0
ee
F e
⎧ ⎫⎪ ⎪⎪ ⎪⎪ ⎪= ⎨ ⎬⎪ ⎪⎪ ⎪⎪ ⎪⎩ ⎭
[ ] ( )11
21 223
1 2 3 41 12 2
'3 0 0 0 04 0 0 0 0 0
1 2 0 0
CBcc c dx
K
TT
⎡ ⎤⎢ ⎥⎢ ⎥=⎢ ⎥⎢ ⎥⎣ ⎦
; { }
1
21
12
'0 00 0
ff
F
⎧ ⎫⎪ ⎪⎪ ⎪= ⎨ ⎬⎪ ⎪⎪ ⎪⎩ ⎭
Căn cứ vào bảng số mã, thu được ma trận độ cứng và vectơ tải trọng nút tổng thể (
có xét tới điều kiện biên ) như sau.

Bài giảng FEM
Page 49 / 134
[ ]( )( ) ( )
( ) ( ) ( )
33 11 11
43 21 21 44 22 22
53 31 54 32 55 33
( ) 1* 2
3
1 2 3
a b c dxK a b c a b c
a b a b a b
⎡ ⎤+ +⎢ ⎥= + + + +⎢ ⎥⎢ ⎥+ + +⎣ ⎦
{ } ( ) ( ) ( ){ }3 1 1 4 2 2 5 3*T
F d e f d e f d e= + + + + +
Trường hợp 2 : Thành phần chuyển vị nút cho trước một giá trị xác định, thí dụ
m aΔ = ( hay liên kết tương ứng với các thành phần chuyển vị nút mδ chịu chuyển vị
cưỡng bức có giá trị bằng a). Khi lập chương trình cho máy tính có thể xử lý theo 2
cách :
1. Trong ma trận độ cứng tổng thể [ ]'K và { }'F ta gán một số A có độ lớn bằng vô
cùng lần lượt vào các vị trí : mmk - thay bằng ( )mmk A+ ; mf - thay bằng ( )mmk A a+ .
Ví dụ 2.4. Với hệ phương trình của bài toán [ ]'K có cấp (4x4), có điều kiện biên
2m aδ δ= = . Sau khi xử lý điều kiện biên như trên thu được :
( ) ( )11 1 1
21 22 2 22
31 32 33 3 3
41 33 43 44 4 4
( )k fk k A dx k A ak k k fk k k k f
δδδδ
⎡ ⎤ ⎧ ⎫ ⎧ ⎫⎢ ⎥ ⎪ ⎪ ⎪ ⎪+ +⎪ ⎪ ⎪ ⎪⎢ ⎥ =⎨ ⎬ ⎨ ⎬⎢ ⎥ ⎪ ⎪ ⎪ ⎪⎢ ⎥ ⎪ ⎪ ⎪ ⎪⎩ ⎭ ⎩ ⎭⎣ ⎦
Hệ phương trình trên thoã mãn điều kiện biên vì phương trình thứ 2 thu được :
( ) ( )21 1 22 2 23 3 24 4 22k k A k k k A aδ δ δ δ+ + + + = +
Chia cả 2 vế cho ( )22k A+ , thu được: 2δ =a
2. Trong ma trận độ cứng tổng thể [ ]'K gán mmk =1; còn với mọi i,j khác m gán mjk =0,
imk =0 ; trong vectơ { }'F gán mf =a.
Với ví dụ 2.3 trên, sau khi xử lý điều kiện biên như trên thu được:
11 1 1
2
31 33 3 3
41 43 44 4 4
0 1 ( )00
k fdx a
k k fk k k f
δδδδ
⎡ ⎤ ⎧ ⎫ ⎧ ⎫⎢ ⎥ ⎪ ⎪ ⎪ ⎪
⎪ ⎪ ⎪ ⎪⎢ ⎥ =⎨ ⎬ ⎨ ⎬⎢ ⎥ ⎪ ⎪ ⎪ ⎪⎢ ⎥ ⎪ ⎪ ⎪ ⎪⎩ ⎭ ⎩ ⎭⎣ ⎦

Bài giảng FEM
Page 50 / 134
Hệ phương trình trên cũng thoã mãn điều kiện biên vì phương trình thứ 2 thu được
2δ =a.

Bài giảng FEM
Page 51 / 134
CHƯƠNG 3. PHÂN TÍCH KẾT CẤU HỆ THANH
3.1. PHẦN TỬ THANH 1 CHIỀU( THANH CHỊU KÉO - NÉN )
Xét phần tử là thanh thẳng hai đầu i-k, có chiều dài l, có độ cứng EF không đổi dọc
theo chiều dài thanh.
Hình 3.1
Thanh chịu tải trọng : lực phân bố r(x) dọc trục thanh, lực tập trung T dọc trục
thanh có chiều như hình vẽ.
Thanh chịu kéo – nén đơn nên chuyển vị, biến dạng, ứng suất tại mọi điểm trên
mỗi tiết diện đều phụ thuộc vào biến x. Hệ trục xy có trục x trùng với trục thanh, có
trục y vuông góc với trục thanh, gốc tại i.
PT chỉ có 2 bậc tự do là 2 chuyển vị thẳng dọc trục tại 2 nút đầu và cuối.
Vec tơ chuyển vị nút và vectơ tải trọng nút có dạng.
{ } ie
k
uu
δ⎧ ⎫
= ⎨ ⎬⎩ ⎭
(3.1)
{ } ixq e
kx
FP
F⎧ ⎫
= ⎨ ⎬⎩ ⎭
(3.2)
3.1.1. Ma trận độ cứng PT thanh chịu kéo nén
Với kết quả xác định hàm dạng PT thanh chịu keo – nén theo (2.33) ta có :

Bài giảng FEM
Page 52 / 134
[ ] ( ) ( )1 21 x xN N x N xl l
⎡ ⎤⎛ ⎞ ⎡ ⎤= − =⎜ ⎟⎢ ⎥ ⎣ ⎦⎝ ⎠⎣ ⎦
Với thanh chịu kéo- nén dọc trục, theo (2.1) ta có { }xxuε ε ∂
= =∂
Suy ra [ ]x∂
∇ =∂
(3.3)
Theo (2.19), ta có : x xEσ ε=
Suy ra: [ ]D E= (3.4)
Thay (2.33) và (3.3) vào (2.37), xác định ma trận [B]:
[ ] [ ][ ] 1 11 x xB Nx l l l l
⎡ ⎤∂⎡ ⎤ ⎛ ⎞ ⎡ ⎤= ∇ = − = −⎜ ⎟⎢ ⎥⎢ ⎥ ⎢ ⎥∂⎣ ⎦ ⎝ ⎠ ⎣ ⎦⎣ ⎦ (3.5)
Theo (2.48), xác định được ma trận độ cứng PT:
[ ] [ ] [ ] [ ] [ ] [ ] [ ]. . . dFdT T
eV l F
K B D B dV B D B x= =∫ ∫ ∫
Thay (3.4), (3.5) vào và biến đổi, thu được:
[ ]0
11 11 1
1 1 1l
e
EFlK E Fdxl l l
l
⎧ ⎫−⎪ ⎪ −⎡ ⎤⎪ ⎪ ⎡ ⎤= − =⎨ ⎬ ⎢ ⎥⎢ ⎥ −⎣ ⎦ ⎣ ⎦⎪ ⎪⎪ ⎪⎩ ⎭
∫ (3.6)
Vậy (3.6) là ma trận độ cứng PT chịu kéo–nén. Đây là ma trận hình vuông cấp
(2x2), đối xứng qua đường chéo chính.
Ma trận độ cứng (3.6) được xét trong HTĐ PT. Để chuyển sang HTĐ KC, ta xét
PT thanh thẳng i-k đã được xét ở trên trong HTĐ KC x’y’ và HTĐ PT xy :

Bài giảng FEM
Page 53 / 134
i
ky
x
v i
v k
ui
uk
e
y'x'
z'
vi
ui
vk
uk
α
'
'
'
'
Hình 3.2
Vectơ chuyển vị nút trong HTĐ PT và HTĐ KC có dạng :
{ } ie
k
uu
δ⎧ ⎫
= ⎨ ⎬⎩ ⎭
; { }'
'
'
''
i
ie
k
k
u
vu
v
δ
⎧ ⎫⎪ ⎪⎪ ⎪= ⎨ ⎬⎪ ⎪⎪ ⎪⎩ ⎭
Tại nút i : ' os ' sini i iu u c vα α= +
Viết dưới dạng ma trận :
[ ] [ ]{ }''os sin
'i
i i ii
uu c L
vα α δ
⎧ ⎫= =⎨ ⎬
⎩ ⎭
Trong đó : [ ] [ ]os siniL c α α= - gọi là ma trận biến đổi vectơ chuyển vị nút tại i
( ) ( )
' ' ' '
2 2' ' ' '
cos ;sink i k i
k i k i
x x y yc sl l
l x x y y
α − −= = = =
= − + −
Tại nút k, tương tự ta có: [ ] [ ]os sinkL c α α=
Với cả PT thanh i-k, phép biến đổi vectơ chuyển vị nút PT từ HTĐ KC về HTĐ PT
là :

Bài giảng FEM
Page 54 / 134
[ ][ ]
' '
' '
' '
0 0 00 ' 0 0 '
i i
i ii i
k k k k
k k
u u
v vu L c su L u c s u
v v
⎧ ⎫ ⎧ ⎫⎪ ⎪ ⎪ ⎪
⎡ ⎤⎧ ⎫ ⎡ ⎤⎪ ⎪ ⎪ ⎪= =⎨ ⎬ ⎨ ⎬ ⎨ ⎬⎢ ⎥ ⎢ ⎥⎣ ⎦⎩ ⎭ ⎣ ⎦ ⎪ ⎪ ⎪ ⎪
⎪ ⎪ ⎪ ⎪⎩ ⎭ ⎩ ⎭
Suy ra ma trận biến đổi toạ độ :
[ ] 0 00 0e
c sT
c s⎡ ⎤
= ⎢ ⎥⎣ ⎦
(3.7)
Theo (2.61), ma trận độ cứng PT thanh chịu kéo- nén trong HTĐ KC có dạng :
[ ] [ ] [ ] [ ]
00 1 1 0 0
'0 1 1 0 00
T
e e e e
cs c sEFK T K T
c c sls
⎡ ⎤⎢ ⎥ −⎡ ⎤ ⎡ ⎤⎢ ⎥= = ⎢ ⎥ ⎢ ⎥⎢ ⎥ −⎣ ⎦ ⎣ ⎦⎢ ⎥⎣ ⎦
[ ]
2 2
2 2
2 2
2 2
'e
c cs c cscs s cs sEFK
l c cs c cscs s cs s
⎡ ⎤− −⎢ ⎥− −⎢ ⎥=⎢ ⎥−⎢ ⎥− −⎢ ⎥⎣ ⎦
(3.8)
Liên hệ với thanh 2 đầu khớp trong dàn phẳng, khi tính theo phương pháp PTHH
mỗi mắt dàn là một đỉnh nút, mỗi thanh dàn là một PT chịu biến dạng dọc trục. Tại
mỗi nút sẽ có 2 bậc tự do : chuyển vị theo phương ngang và chuyển vị theo phương
đứng. Xét trong HTĐ KC ma trận độ cứng cũng có dạng như ma trận (3.8)
3.1.2. Xác định vectơ tải trọng nút { }q eP do tải trọng tác dụng trong thanh
3.1.2.1. Tải trọng phân bố :
Với tải trọng phân bố đều như trên hình (3.1) và theo (2.50) ta có :
{ } [ ] ( )0 0
1( )
Tl l
q e
xlP N r x dx r x dx
xl
⎧ ⎫−⎪ ⎪⎪ ⎪= = ⎨ ⎬⎪ ⎪⎪ ⎪⎩ ⎭
∫ ∫ (3.9)
{ }0
12
2
l
q e
x rllP rdx
x rll
⎧ ⎫ ⎧ ⎫−⎪ ⎪ ⎪ ⎪⎪ ⎪ ⎪ ⎪⇒ = =⎨ ⎬ ⎨ ⎬⎪ ⎪ ⎪ ⎪
⎪ ⎪⎪ ⎪ ⎩ ⎭⎩ ⎭
∫ (3.10)

Bài giảng FEM
Page 55 / 134
3.1.2.2. Lực tập trung :
Cho lực T hướng dọc trục thanh, có chiều như trên hình (3.1) :
{ } ( )( )
1
2q e
N lP T
N lηη
⎡ ⎤= ⎢ ⎥
⎣ ⎦ (3.11)
Trường hợp lực T đặt tại giữa nhịp :
{ } / 2/ 2q e
TP
T⎡ ⎤
= ⎢ ⎥⎣ ⎦
(3.12)
3.2. PHẦN TỬ THANH 2 CHIỀU (THANH UỐN NGANG PHẲNG VÀ KÉO-NÉN)
3.2.1. Phần tử thanh hai đầu ngàm.
Xét PT thanh thẳng i-k, có chiều dài l, có độ cứng EF và EJ không đổi dọc theo
chiều dài thanh. PT thanh i-k được nối với các PT thanh lân cận bằng nút cứng. Khi
xét riêng PT này, liên kết ở 2 đầu được coi là ngàm.
Hình 3.3
Thanh chịu tải trọng :
Lực phân bố q(x) có vuông góc trục thanh và r(x) dọc trục thanh

Bài giảng FEM
Page 56 / 134
Lực tập trung P vuông góc trục thanh và mô men tập trung M ( tất cả có chiều như
hình vẽ ).
Hệ trục xy có trục x trùng với trục thanh, có trục y vuông góc với trục thanh và gốc
tại i.
Vectơ chuyển vị nút và vectơ tải trọng nút tương ứng gồm 6 thành phần
{ } { }Ti i i k k ke
u v u vδ ϕ ϕ= (3.13)
{ } { }ixq iy i kx ky keP F F F F F Fϕ ϕ= (3.14)
3.2.1.1. Xác định ma trận hàm dạng
Với mỗi tiết diện của PT có 3 thành phần chuyển vị; gồm chuyển vị thẳng dọc trục
u(x), chuyển vị thẳng v(x) vuông góc với trục thanh và chuyển vị xoay ( )xϕ . Trong
đó chuyển vị xoay và chuyển vị thẳng vuông góc với trục có quan hệ : ( ) dvxdx
ϕ = . Do
đó chọn u(x) và v(x) làm 2 thông số. Vectơ các hàm chuyển vị có dạng :
{ }
1
2
1 2 32 3 2 3
3 4 5 6 4
5
6
( ) 1 0 0 0 0( ) 0 0 1
aa
a a x au x xu
a a x a x a x av x x x xaa
⎧ ⎫⎪ ⎪⎪ ⎪⎪ ⎪+⎧ ⎫⎧ ⎫ ⎡ ⎤ ⎪ ⎪= = =⎨ ⎬ ⎨ ⎬ ⎨ ⎬⎢ ⎥+ + +⎩ ⎭ ⎣ ⎦⎩ ⎭ ⎪ ⎪⎪ ⎪⎪ ⎪⎪ ⎪⎩ ⎭
(3.15)
Suy ra : ( ) 2 3
1 0 0 0 00 0 1
xP x
x x x⎡ ⎤
⎡ ⎤ = ⎢ ⎥⎣ ⎦⎣ ⎦
(3.16)
Hàm chuyển vị thẳng theo phương x : 1 2( )u x a a x= +
Hàm chuyển vị thẳng theo phương y : 2 33 4 5 6( )v x a a x a x a x= + + +
Hàm chuyển vị xoay quanh trục z vuông góc với mặt phẳng x0y :
( ) 24 5 6'( ) 2 3x v x a a x a xϕ = = + +
Thực hiện đồng nhất :

Bài giảng FEM
Page 57 / 134
( )( )( )( )( )( )
1
3
4
1 2
2 33 4 5 6
24 5 6
x=0
x=0
x=0
x=l
x=l
x=l 2 3
i
i
i
k
k
k
u u a
v v a
a
u u a a l
v v a a l a l a l
a a l a l
ϕ ϕ
ϕ ϕ
= =
= =
= =
= = +
= = + + +
= = + +
Viết dưới dạng ma trận :
{ } [ ]{ }
1
2
3
42 3
52
6
1 0 0 0 0 00 0 1 0 0 00 0 0 1 0 01 0 0 0 00 0 10 0 0 1 2 3
e
aaa
A aalal l lal l
δ
⎧ ⎫⎡ ⎤⎪ ⎪⎢ ⎥⎪ ⎪⎢ ⎥⎪ ⎪⎢ ⎥ ⎪ ⎪= =⎢ ⎥ ⎨ ⎬
⎢ ⎥ ⎪ ⎪⎢ ⎥ ⎪ ⎪⎢ ⎥ ⎪ ⎪
⎪ ⎪⎣ ⎦ ⎩ ⎭
(3.17)
Suy ra ma trận [ ] 1A − có dạng:
[ ] 1
2 2
3 2 3 2
1 0 0 0 0 01/ 0 0 1/ 0 00 0 0 0 00 0 0 0 00 3 / 2 / 0 3 / 1/0 2 / 1/ 0 2 / 1/
l ll
Al
l l l ll l l l
−
⎡ ⎤⎢ ⎥−⎢ ⎥⎢ ⎥
= ⎢ ⎥⎢ ⎥⎢ ⎥− − −⎢ ⎥⎣ ⎦
(3.18)
Thay (3.16), (3.18) vào (2.30), xác định ma trận hàm dạng [N]
[ ] ( ) [ ] ( ) ( )( ) ( ) ( ) ( )
1 1 4
2 3 5 6
0 0 0 00 0
N x N xN P x A
N x N x N x N x− ⎡ ⎤
⎡ ⎤= = ⎢ ⎥⎣ ⎦⎣ ⎦
(3.19)
Trong đó:
( )1 1 xN xl
⎛ ⎞= −⎜ ⎟
⎝ ⎠ ; ( )
2 3
2 2 3
3 21 x xN xl l
⎛ ⎞= − +⎜ ⎟
⎝ ⎠;
( )2 3
3 2
2x xN x xl l
⎛ ⎞= − +⎜ ⎟
⎝ ⎠; ( )4
xN xl
= ;
( )2 3
5 2 3
3 2x xN xl l
⎛ ⎞= −⎜ ⎟
⎝ ⎠; ( )
2 3
6 2
x xN xl l
⎛ ⎞= − +⎜ ⎟
⎝ ⎠;
(3.20)
3.2.1.2. Ma trận độ cứng PT thanh chịu uốn ngang phẳng và kéo –nén.

Bài giảng FEM
Page 58 / 134
Đối với bài toán một chiều, ta có: { } [ ];x D Eε ε= = .
Kết hợp 2 trường hợp: thanh chịu kéo- nén và thanh chịu uốn, ta có:
{ }2 2
2 2x x x xk n u uu vy y
vε ε ε− ⎡ ⎤ ⎧ ⎫∂ ∂ ∂ ∂
= + = − = − ⎨ ⎬⎢ ⎥∂ ∂ ∂ ∂ ⎩ ⎭⎣ ⎦
Suy ra : [ ]2
2x xy
⎡ ⎤∂ ∂∇ = −⎢ ⎥∂ ∂⎣ ⎦
(3.21)
Thay (3.19); (3.21) vào (2.37), xác định ma trận [ ]B :
[ ] [ ][ ] ( ) ( )( ) ( ) ( ) ( )
21 4
22 3 5 6
0 0 0 00 0x x
N x N xB N y
N x N x N x N x⎡ ⎤⎡ ⎤∂ ∂
= ∇ = − ⎢ ⎥⎢ ⎥∂ ∂⎣ ⎦ ⎣ ⎦
Suy ra:
[ ] ( ) ( ) ( ) ( ) ( ) ( )1 2 3 4 5 6' '' '' ' '' ''B N x yN x yN x N x yN x yN x⎡ ⎤= − − − −⎣ ⎦ (3.22)
Trong đó:
( ) ( ) ( )
( ) ( ) ( )
1 2 32 3 2
4 5 62 3 2
1 6 12 4 6' ; '' ; ''
1 6 12 2 6' ; '' ; ''
x x x xN x N x N xl l l l l
x xN x N x N xl l l l l
⎧ ⎛ ⎞ ⎛ ⎞= − = − + = − +⎜ ⎟ ⎜ ⎟⎪⎪ ⎝ ⎠ ⎝ ⎠⎨
⎛ ⎞ ⎛ ⎞⎪ = = − = − +⎜ ⎟ ⎜ ⎟⎪ ⎝ ⎠ ⎝ ⎠⎩
(3.23)
Xác định [ ]eK theo (2.48), ta có:
[ ] [ ] [ ] [ ] [ ]
'1
''2''3
1 2 3 4 5 6'4
''5''6
. . ' '' '' ' '' ''T
ev v
NyNyN
K B D B dv E N yN yN N yN yN dvNyNyN
⎡ ⎤⎢ ⎥−⎢ ⎥⎢ ⎥−
= = − − + − −⎢ ⎥⎢ ⎥⎢ ⎥−⎢ ⎥−⎢ ⎥⎣ ⎦
∫ ∫

Bài giảng FEM
Page 59 / 134
[ ]
'1 1
'' 2 '' ''2 1 2 2
'' 2 '' '' 2 '' ''3 1 3 2 3 3
' ' ' '4 1 4 2 4 3 4 4
'' 2 '' '' 2 '' '' '' 2 '' ''5 1 5 2 5 3 5 4 5 5
'
'
'
' '' '' '
' '
v
v v
v v ve
v v v v
v v v v v
N N dv
yN N dv y N N dv dx
yN N dv y N N dv y N N dvK E
N N dv yN N dv yN N dv N N dv
yN N dv y N N dv y N N dv yN N dv y N N dv
y
−
−
=− −
− −
−
∫
∫ ∫
∫ ∫ ∫
∫ ∫ ∫ ∫
∫ ∫ ∫ ∫ ∫'' 2 '' '' 2 '' '' '' 2 '' '' 2 '' ''6 1 6 2 6 3 6 4 6 5 6 6' '
v
v v v v v v
N N dv y N N dv y N N dv yN N dv y N N dv y N N dv
⎡ ⎤⎢ ⎥⎢ ⎥⎢ ⎥⎢ ⎥⎢ ⎥⎢ ⎥⎢ ⎥⎢ ⎥⎢ ⎥⎢ ⎥⎢ ⎥⎢ ⎥⎢ ⎥
−⎢ ⎥⎣ ⎦
∫
∫ ∫ ∫ ∫ ∫ ∫
Trong đó:
Những tích phân có thừa số (y2), ví dụ k22 , khi triển khai tích phân có dạng:
2 '' '' 2 '' ''22 2 2 2 2. . . . . . . .
v F l
k E y N N dV E y dF N N dx= =∫ ∫ ∫
Với 2
F
J y dF= ∫ là momen quán tính của mặt cắt ngang lấy đối với trục z
Những tích phân có thừa số (-y), ví dụ k21, khi triển khai tích phân có dạng:
'' ' '' '21 2 1 2 1. . . . . . . . 0
v F l
k E yN N dV E y dF N N dx= − = − =∫ ∫ ∫
Vì 0F
ydF =∫ (momen tĩnh của tiết diện đối với trục đối xứng trung tâm = 0)
Sau khi biến đổi, ma trận độ cứng của PT thanh 2 đầu ngàm chịu kéo nén và uốn có
dạng:
[ ]
3 2 3 2
2 2
3 2 3 2
2 2
0 0 0 0
12 6 12 60 0
6 4 6 20 0
0 0 0 0
12 6 12 60 0
6 2 6 40 0
e
EF EFl l
EJ EJ EJ EJl l l lEJ EJ EJ EJl l l lK
EF EFl l
EJ EJ EJ EJl l l l
EJ EJ EJ EJl l l l
⎡ ⎤−⎢ ⎥⎢ ⎥⎢ ⎥−⎢ ⎥⎢ ⎥⎢ ⎥−⎢ ⎥= ⎢ ⎥⎢ ⎥−⎢ ⎥⎢ ⎥
− − −⎢ ⎥⎢ ⎥⎢ ⎥−⎢ ⎥⎣ ⎦
(3.24)

Bài giảng FEM
Page 60 / 134
Đây là biểu thức xác định ma trận độ cứng phần tử 2 dầu ngàm chịu uốn ngang phẳng
và chịu kéo nén, ma trận vuông cấp (6x6), đối xứng qua đường chéo chính và xét trong
HTĐ PT.
Theo công thức (2.46) với các ma trận biến đổi toạ độ [T]e của PT thanh tương ứng ta
có ma trận độ cứng xét trong HTĐ KC:
[ ] [ ] [ ]' . .T
e e eeK T K T⎡ ⎤ = =⎣ ⎦
122 23
12 122 23 3
6 6 42 2
12 12 6 122 2 2 23 3 2 3
12 12 6 12 122 2 2 23 3 2 3 3
6 62
EF EJc s
l lEF EJ EF EJ
cs s cl l l l
EJ EJ EJs c
l l lEF EJ EF EJ EJ EF EJ
c s cs s c sl l l l l l lEF EJ EF EJ EJ EF EJ EF EJ
cs s c c cs s cl l l l l l l l l
EJ EJs
l l
+
− +
−
− − − + +
− + − − − − +
⎛ ⎞⎜ ⎟⎝ ⎠
⎛ ⎞⎜ ⎟⎝ ⎠
⎛ ⎞ ⎛ ⎞⎜ ⎟ ⎜ ⎟⎝ ⎠ ⎝ ⎠
2 6 6 42 2 2
EJ EJ EJ EJc s c
l l l l
⎡ ⎤⎢ ⎥⎢ ⎥⎢ ⎥⎢ ⎥⎢ ⎥⎢ ⎥⎢ ⎥⎢ ⎥⎢ ⎥⎢ ⎥⎢ ⎥⎢ ⎥⎢ ⎥⎣ ⎦
(3.25)
3.2.1.3. Xác định vectơ tải trọng nút { }q eP do tải trọng tác dụng trong thanh
Trong trường hợp tổng quát tải trọng trên phần tử có thể có lực phân bố, lực tập trung
và mô men tập trung. Hướng dương của các tải trọng này được thể hiện trên hình vẽ :
Hình :3.4
Công thức xác định tải trọng phần tử quy về nút

Bài giảng FEM
Page 61 / 134
{ }( )
[ ] ( ) ( )
[ ] ( ) ( ) ( )
106 1
1 10
F
i
Q M
i i
L n TTu u T ie
i
nL nT TTv v P i v M i
i i
P N q x dx N x T
N r x dx N x P N x M
=×
= =
⎡ ⎤= + +⎣ ⎦
⎡ ⎤ ⎡ ⎤′+ +⎣ ⎦ ⎣ ⎦
∑∫
∑ ∑∫
Trong đó :
Pi , xPi :là lực tập trung và hoành độ điểm đặt lực theo phương vuông góc với trục phần
tử.
Ti , xTi :là lực tập trung và hoành độ điểm đặt lực theo phương trục phần tử.
Mi , xMi :là momen tập trung và hoành độ điểm đặt.
nQ , nF , nM : là số lực tập trung và momen tập trung trên chiều dài phần tử.
( ) ( )r x ,q x : lực phân bố theo phương trục phần tử và vuông góc với trục phần tử.
a. Tải trọng phân bố
Với tải trọng phân bố như trên hình 3.4 ; theo (2.50), ta có
{ } [ ] { }
( )( )( )
( )( )( )
( )( )
( ) ( )
( ) ( )
( ) ( )
( ) ( )
( ) ( )
( ) ( )
10
120
2
303
0 04
405
506
60
000
000
l
l
lTl l
q le
l
l
N x r x dx
N x N x q x dxN x
N x q x dxN x r xP N q dx dx
N x q x N x r x dxN x
N x q x dxN x
N x q x dx
⎧ ⎫⎪ ⎪⎪ ⎪⎡ ⎤⎪ ⎪⎢ ⎥⎪ ⎪⎢ ⎥⎪ ⎪⎢ ⎥ ⎧ ⎫⎪ ⎪ ⎪ ⎪= = =⎢ ⎥ ⎨ ⎬ ⎨ ⎬
⎪ ⎪⎢ ⎥ ⎩ ⎭ ⎪ ⎪⎢ ⎥ ⎪ ⎪⎢ ⎥ ⎪ ⎪⎢ ⎥ ⎪ ⎪⎣ ⎦
⎪ ⎪⎪ ⎪⎩ ⎭
∫∫∫
∫ ∫∫∫∫
(3.26)
Trường hợp với tải trọng phân bố đều: ( ) ( )ons ; onsq x q c t r x r c t= = = = ; ta có
{ }2 2
2 2 12 2 2 12q e
rl ql ql rl ql qlP⎧ ⎫
= ⎨ ⎬⎩ ⎭
(3.27)
b. Lực tập trung và mô men tập trung
Cho lực tập trung và mô men tập trung như trên hình 3.4; ta có:

Bài giảng FEM
Page 62 / 134
{ }
( )( )( )
( )( )( )
( )( )
( )( )
( )( ) ( )( ) ( )
( )( ) ( )( ) ( )
1 1
22 2 2
33 3 3
4 4
55 5 5
66 6 6
00 .'0 . ' .'0 . ' .
.00 .
'0 . ' .'0 . ' .
q e
N l N l TN lN l N l P N l MN lN l N l P N l MT
P MN l N l TP
N lN l N l P N l MN lN l N l P N l M
η ηγμ μ γγμ μ γ
η ηγμ μ γγμ μ γ
⎡ ⎤ ⎡ ⎤⎡ ⎤⎢ ⎥ ⎢ ⎥⎢ ⎥ +⎢ ⎥ ⎢ ⎥⎢ ⎥⎢ ⎥ ⎢ ⎥⎢ ⎥ +⎧ ⎫
= + =⎢ ⎥ ⎢ ⎥⎢ ⎥⎨ ⎬⎩ ⎭⎢ ⎥ ⎢ ⎥⎢ ⎥
⎢ ⎥ ⎢ ⎥⎢ ⎥ +⎢ ⎥ ⎢ ⎥⎢ ⎥
+⎢ ⎥⎢ ⎥ ⎢ ⎥⎣ ⎦⎣ ⎦ ⎣ ⎦
(3.28)
Trường hợp lực tập trung và mô men tập trung đặt tại giữa nhịp:
{ } 3 32 2 2 8 4 2 2 2 8 4
T
q e
T P M Pl M T P M Pl MPl l
⎧ ⎫⎛ ⎞ ⎛ ⎞ ⎛ ⎞ ⎛ ⎞= − − + − −⎨ ⎬⎜ ⎟ ⎜ ⎟ ⎜ ⎟ ⎜ ⎟⎝ ⎠ ⎝ ⎠ ⎝ ⎠ ⎝ ⎠⎩ ⎭
(3.29)
3.2.2. Phần tử thanh có đầu trái ngàm đầu phải khớp.
Xét phần tử thanh thẳng i-k đầu trái ngàm ,phải khớp ,có chiều dài l ,độ cứng chống
kéo nén EF ,độ cứng chống uốn EJ .Phần tử được nối với các phần tử lân cận bằng nút
cứng tại đầu trái và nút khớp tại đầu phải .Khi xét riêng phần tử này ,liên kết ở hai đầu
được coi là đầu ngàm đầu khớp.
Thanh chịu tác dụng của tải trọng :
Lực phân bố : q(x) có phương vuông góc với trục thanh ,r(x) có phương dọc trục
thanh.
Lực tập trung : P vuông góc với trục thanh, T có phương dọc trục thanh và momen tập
trung M .(Hình vẽ)
Hệ trục Oxy có trục Ox trùng với trục thanh ,Oy vuông góc với trục thanh, gốc O trùng
với i.

Bài giảng FEM
Page 63 / 134
Hình 3.5
Véc tơ chuyển vị nút và véc tơ tải tải bao gồm 5 thành phần.
{ } { }
{ } { }ix
Ti i k k ke
T
q iy k kx kye
u v u v
P F F F F Fϕ
δ ϕ≡
=
(3.30)
(3.31)
Phần tử có hai nút và có 5 bậc tự do, chiều dương của các chuyển vị và tải trọng nút
như hình vẽ.
3.2.2.1. Ma trận hàm dạng.
Với cách làm tương tự trường hợp phần tử hai đầu ngàm đã xét ở mục trên,phần tử
thanh thẳng chịu kéo-nén và uốn ngang phẳng.
Ta xác định hàm dạng :
[ ] 1 4
2 3 5
0 0 00 0N N
NN N N
⎡ ⎤= ⎢ ⎥
⎣ ⎦ (3.32)
Trong đó :
( )1 1 1 xN N xl
⎛ ⎞= = −⎜ ⎟
⎝ ⎠ ; ( )
2 3
2 2 2 3
312 2x xN N xl l
⎛ ⎞= = − +⎜ ⎟
⎝ ⎠;
( )2 3
3 3 2
32 2x xN N x xl l
⎛ ⎞= = − −⎜ ⎟
⎝ ⎠; ( )4 4
xN N xl
= = ;
(3.33)

Bài giảng FEM
Page 64 / 134
( )2 3
5 5 2 3
32 2x xN N xl l
⎛ ⎞= = −⎜ ⎟
⎝ ⎠;
Xác định ma trận [B]:
[ ] [ ][ ]2
1 42
2 3 5
0 0 00 0N N
B N yN N Nx x
⎡ ⎤ ⎡ ⎤∂ ∂= ∇ = −⎢ ⎥ ⎢ ⎥∂ ∂ ⎣ ⎦⎣ ⎦
Suy ra: [ ] [ ]1 2 3 4 5B N yN yN N yN′ ′′ ′′ ′ ′′= − − − (3.34)
Trong đó
1
' 1Nl
⎛ ⎞= ⎜ ⎟
⎝ ⎠ ; ''
2 2 3
3 3xNl l
⎛ ⎞= − +⎜ ⎟
⎝ ⎠ ;
''3 2
3 3xNl l
⎛ ⎞= − +⎜ ⎟
⎝ ⎠ ; '
41Nl
⎛ ⎞= ⎜ ⎟
⎝ ⎠ ; ''
5 2 3
3 3xNl l
⎛ ⎞= −⎜ ⎟
⎝ ⎠
(3.35)
3.2.2.2. Ma trận độ cứng phần tử thanh đầu ngàm đầu khớp.
Xác định [K]e , ta có :
[ ]( )
[ ]( )
[ ]( )
[ ]( )
[ ] [ ]5 1 1 1 1 55 5
.e
T T
eV l F
K B D B dV E B B dF dx× × ××
= =∫ ∫ ∫
Thay các ma trận [B]T , [B] và [D]=E vào công thức trên cùng các lưu ý:
2 =∫ zA
y dA J là mô men quán tính của mặt cắt ngang với trục z.
0=∫A
ydA là mô men tĩnh với trục trung hòa thì bằng không.
Vậy ma trận độ cứng của phần tử :

Bài giảng FEM
Page 65 / 134
[ ]
3 2 3
2 2
3 2 3
0 0 0
3 3 30 0
3 3 30 0
0 0 0
3 3 30 0
e
EA EAL L
EJ EJ EJL L LEJ EJ EJKL L L
EA EAL L
EJ EJ EJL L L
⎡ ⎤−⎢ ⎥⎢ ⎥⎢ ⎥−⎢ ⎥⎢ ⎥⎢ ⎥= −⎢ ⎥⎢ ⎥−⎢ ⎥
⎢ ⎥⎢ ⎥
− −⎢ ⎥⎣ ⎦
(3.36)
Vậy ma trận độ cứng phần tử thanh đầu trái khớp-phải ngàm chịu uốn ngang phẳng
và kéo nén trong hệ tọa độ phần tử. Ma trận này là ma trận vuông cấp 5, đối xứng qua
đường chéo chính.
Theo công thức (3.36) với các ma trận chuyển [T]e của phần tử thanh tương ứng ta sẽ
có ma trận độ cứng xét trong hệ tọa độ kết cấu.
[K’]e=[T]eT [K]e[T]e
[K’]e………….
3.2.2.3. Véc tơ tải quy nút.
Trong trường hợp tổng quát tải trọng trên phần tử có thể có lực phân bố, lực tập
trung và mô men tập trung. Hướng dương của các tải trọng này được thể hiện trên hình
vẽ :
Hình 3.6 : Tải trọng trên phần tử đầu ngàm đầu khớp
Công thức xác định tải trọng phần tử quy về nút

Bài giảng FEM
Page 66 / 134
{ }( )
[ ] ( ) ( )
[ ] ( ) ( ) ( )
106 1
1 10
F
i
Q M
i i
L n TTu u F ie
i
nL nT TTv v Q i v M i
i i
P N q x dx N x T
N r x dx N x P N x M
=×
= =
⎡ ⎤= + +⎣ ⎦
⎡ ⎤ ⎡ ⎤′+ +⎣ ⎦ ⎣ ⎦
∑∫
∑ ∑∫ (3.37)
trong đó :
Pi , xQi là lực tập trung và hoành độ điểm đặt lực theo phương vuông góc với trục phần
tử.
Ti , xFi là lực tập trung và hoành độ điểm đặt lực theo phương trục phần tử.
Mi , xMi là momen tập trung và hoành độ điểm đặt.
nP , nT , nM, là số lực tập trung và momen tập trung trên chiều dài phần tử.
( ) ( )q x ,r x : lực phân bố theo phương trục phần tử vè vuông góc với trục phần tử.
Ma trận đạo hàm của hàm dạng :
[ ]2 2 2
2 3 2 2 3
3 3 3 3 3 30 1 02 2v
x x x x x xNL L L L L L
⎡ ⎤′ = − + − + −⎢ ⎥
⎣ ⎦
Các trường hợp cụ thể sẽ được tính như ở dưới đây.
Trường hợp lực phân bố đều vuông góc với trục thanh: ( ) 0; ( ) 0.q x const q r x= = =
Hình 3.7:

Bài giảng FEM
Page 67 / 134
{ } [ ]
2 3
2 3
22 30
0 020 0
2 3
2 3
0 0531
82 23
82 20 0
3382 2
o
L LT
ve
o
q Lx xL L
q Lx xP N q dx q dxxL L
q Lx xL L
⎡ ⎤ ⎧ ⎫⎢ ⎥ ⎪ ⎪⎢ ⎥ ⎪ ⎪− +⎢ ⎥ ⎪ ⎪⎢ ⎥ ⎪ ⎪⎪ ⎪⎢ ⎥= = =− + ⎨ ⎬⎢ ⎥ ⎪ ⎪⎢ ⎥ ⎪ ⎪⎢ ⎥ ⎪ ⎪⎢ ⎥ ⎪ ⎪−⎢ ⎥ ⎪ ⎪⎩ ⎭⎣ ⎦
∫ ∫ (3.38)
Trường hợp đồng thời lực phân bố đều vuông góc với trục thanh và vuông góc với trục
thanh: ( ) ( )0 0,q x q r x r= =
Hình 3.8 :
Áp dụng công thức :
{ } [ ] [ ]0 00 0
L LT T
u veP N r dx N q dx= +∫ ∫
Ta có :
{ }
2 3
2 3
22 30
0 020 0
2 3
2 3
0 21 531
82 2030
82 20
23032 2
8
o
o
L L
e
o
o
r L
xq Lx xL
L Lq Lx xP r dx q dxx
L Lxr L
Lx x
q LL L
⎧ ⎫⎪ ⎪⎡ ⎤
⎡ ⎤ ⎪ ⎪⎢ ⎥−⎢ ⎥ ⎪ ⎪⎢ ⎥− +⎢ ⎥ ⎪ ⎪⎢ ⎥⎢ ⎥ ⎪ ⎪⎢ ⎥ ⎪ ⎪⎢ ⎥ ⎢ ⎥= + =− + ⎨ ⎬⎢ ⎥ ⎢ ⎥ ⎪ ⎪⎢ ⎥ ⎢ ⎥ ⎪ ⎪⎢ ⎥ ⎢ ⎥ ⎪ ⎪⎢ ⎥ ⎢ ⎥ ⎪ ⎪−⎣ ⎦ ⎢ ⎥ ⎪ ⎪⎣ ⎦
⎪ ⎪⎩ ⎭
∫ ∫ (3.39)

Bài giảng FEM
Page 68 / 134
Trường hợp có lực tập trung P đặt vuông góc với trục phần tử và cách nút đầu phần tử
một khoảng a (xQ = a)
Hình 3.9.
Trường hợp có lực tập trung Q đặt vuông góc với trục phần tử và cách nút đầu phần tử
một khoảng a (xQ = a) và lực tập trung T đặt vuông góc với trục phần tử và cách nút
đầu phần tử một khoảng b (xF = b)
Hình 3.10.
Trường hợp lực tập trung P hướng xuống và đặt ở giữa phần tử:
Hình 3.11
{ } 11 3 50 016 16 16
T
e
P PL PP ⎧ ⎫= − − −⎨ ⎬⎩ ⎭
(3.40)

Bài giảng FEM
Page 69 / 134
Trường hợp có mô men tập trung M đặt vuông góc với trục phần tử và cách nút đầu
phần tử một khoảng a (xM = a)
Hình 3.12
{ } ( )
2
2 3 1
22
32
4
52
2 3
0
3 32
3 312
0
3 3
Tve
a aM PL LP
a aP N a M M PL L
PP
a aML L
⎧ ⎫⎪ ⎪
⎛ ⎞⎪ ⎪− +⎜ ⎟ ⎧ ⎫⎪ ⎪⎝ ⎠ ⎪ ⎪⎪ ⎪ ⎪ ⎪⎛ ⎞⎪ ⎪ ⎪ ⎪′= = − + =⎡ ⎤ ⎨ ⎬ ⎨ ⎬⎜ ⎟⎣ ⎦⎝ ⎠⎪ ⎪ ⎪ ⎪
⎪ ⎪ ⎪ ⎪⎪ ⎪ ⎪ ⎪⎩ ⎭⎪ ⎪⎛ ⎞
−⎜ ⎟⎪ ⎪⎝ ⎠⎩ ⎭
(3.41)
Ma trận chuyển tọa độ.
Hệ tọa độ riêng xy của phần tử với gốc ở nút 1, trục x dọc theo trục phần tử và hướng
dương theo hướng từ nút 1 đến nút 2. Quay truc x góc 090 theo chiều lượng giác được
trục y. Hệ toa độ tổng thể xy, góc giữa trục x và x’ là α

Bài giảng FEM
Page 70 / 134
1
2y
x
q2
q q'3
q5
q1
q4
e
3
y'x'
z'
q'2
q'1
q'5
q'4
α
Hình 3.13
Véc tơ chuyển vị nút trong hệ tọa riêng của phần tử { }eq :
{ } { }Ti i i k ke
u v u vδ ϕ=
Véc tơ chuyển vị nút trong hệ tọa độ tổng thể { }eq′ :
{ } { }' ' ' ' ' ' Ti i i k ke
u v u vδ ϕ=
Quan hê giữa chúng:
{ }( )
[ ]( )
{ }( )5 1 5 15 5
'e ee
Tδ δ× ××
=
trong đó ma trận chuyển trục:
[ ]
0 0 00 0 0
0 0 1 0 00 0 00 0 0
e
c ss c
Tc ss c
⎡ ⎤⎢ ⎥−⎢ ⎥⎢ ⎥=⎢ ⎥⎢ ⎥⎢ ⎥−⎣ ⎦
(3.42)
các cosin chỉ phương
( )
( )
2 1
2 1
cos cos ,
sin cos ,
x xx x cL
y yx y sL
′ ′−′= = =
′ ′−′= = =
α
α
Do các chuyển vị nút {δ}e gây ra các biến dạng độc lập với nhau. Cụ thể:

Bài giảng FEM
Page 71 / 134
+ Phần tử bị biến dạng dọc trục bởi: { }Ti k e
u u
+ Phần tử bị uốn bởi : { }Ti i k e
v vϕ
3.2.3. Phần tử thanh có đầu trái khớp đầu phải ngàm
Tương tự ,ta xét phần tử thanh thẳng đầu trái khớp ,đầu phải ngàm (i-khớp,k-ngàm)
,có chiều dài l ,độ cứng chống kéo nén EF ,độ cứng chống uốn EJ không đổi dọc trục
thanh.
Thanh chịu tác dụng của tải trọng :
Lực phân bố : q(x) có phương vuông góc với trục thanh ,r(x) có phương dọc trục
thanh.
Lực tập trung : P vuông góc với trục thanh, T có phương dọc trục thanh và momen tập
trung M .(Hình vẽ)
Hệ trục Oxy có trục Ox trùng với trục thanh ,Oy vuông góc với trục thanh ,gốc O trùng
với i.
Hình 3.14
Véc tơ chuyển vị nút và véc tơ tải tải bao gồm 5 thành phần.

Bài giảng FEM
Page 72 / 134
{ } { }
{ } { }ix
Ti i k k ke
T
q iy kx ky ke
u v u v
P F F F F F ϕ
δ θ≡
=
3.2.3.1. Ma trận hàm dạng.
Tương tự với phần tử thanh đầu ngàm đầu khớp ,ta lần lượt có ma trận hàm dạng :
[ ] 1 4
2 3 5
0 0 00 0N N
NN N N
⎡ ⎤= ⎢ ⎥
⎣ ⎦
Trong đó :
( )1 1 1 xN N xl
⎛ ⎞= = −⎜ ⎟
⎝ ⎠ ; ( )
3
2 2 3
312 2x xN N xl l
⎛ ⎞= = − +⎜ ⎟
⎝ ⎠;
( )3
3 3 3
32 2x xN N xl l
⎛ ⎞= = −⎜ ⎟
⎝ ⎠; ( )4 4
xN N xl
= = ;
( )3
5 5 22 2x xN N x
l⎛ ⎞
= = − −⎜ ⎟⎝ ⎠
;
Xác định ma trận [B]:
[ ] [ ] [ ]2
1 42
2 3 5
0 0 00 0N N
B N yN N Nx x
⎡ ⎤ ⎡ ⎤∂ ∂= ∇ = −⎢ ⎥ ⎢ ⎥∂ ∂ ⎣ ⎦⎣ ⎦
Suy ra: [ ] [ ]1 2 4 3 5B N yN N yN yN′ ′′ ′ ′′ ′′= − − −
Trong đó
1
' 1Nl
⎛ ⎞= ⎜ ⎟
⎝ ⎠ ; ''
2 3
3xNl
⎛ ⎞= ⎜ ⎟
⎝ ⎠ ; '
41Nl
⎛ ⎞= ⎜ ⎟
⎝ ⎠ ; ''
3 3
3xNl
⎛ ⎞= −⎜ ⎟
⎝ ⎠ ; ''
5 2
3xNl
⎛ ⎞= ⎜ ⎟
⎝ ⎠
3.2.3.2. Ma trận độ cứng phần tử thanh đầu khớp đầu ngàm.
Xác định [K]e theo...,ta có :
[ ]( )
[ ]( )
[ ]( )
[ ]( )
[ ] [ ]5 1 1 1 1 55 5
.e
T T
eV l F
K B D B dV E B B dF dx× × ××
= =∫ ∫ ∫
Thay các ma trận [B]T , [B] và [D]=E vào công thức trên cùng các lưu ý
2 =∫ zA
y dA J là mô men quán tính của mặt cắt ngang với trục z.

Bài giảng FEM
Page 73 / 134
0=∫A
ydA Mô men tĩnh với trục trung hòa thì bằng không.
Vậy ma trận độ cứng của phần tử :
[ ]
3 3 2
3 3 2
2 2
0 0 0
3 3 30 0
0 0 0
3 3 30 0
3 3 30 0
e
EA EAL L
EJ EJ EJL L L
EA EJKL L
EJ EJ EJL L L
EJ EJ EJL L L
⎡ ⎤−⎢ ⎥⎢ ⎥⎢ ⎥−⎢ ⎥⎢ ⎥⎢ ⎥= −⎢ ⎥⎢ ⎥
− −⎢ ⎥⎢ ⎥⎢ ⎥
−⎢ ⎥⎣ ⎦
Vậy ma trận độ cứng phần tử thanh đầu trái khớp -phải ngàm chịu uốn ngang phẳng và
kéo nén trong hệ tọa độ phần tử .Ma trận này là ma trận vuông cấp 5 ,đối xứng qua
đường chéo chính.
Theo công thức… với các ma trận chuyển [T]e của phần tử thanh tương ứng ta sẽ có
ma trận độ cứng xét trong hệ tọa độ kết cấu.
[K’]e=[T]eT [K]e[T]e
[K’]e………….
3.2.3.3. Véc tơ tải trọng nút {Pq}e phần tử thanh đầu khớp đầu ngàm.
a,Tải trọng phân bố.
Với tải trọng phân bố như trên hình 3.14; theo (2.50), ta có
{ } [ ] { }
( )( )
( )( )( )
( )( )
( ) ( )
( ) ( )
( ) ( )
( ) ( )
( ) ( )
10
120
2
4 30 0 0
3405
50
00
000
l
l
Tl l lq e
l
l
N x r x dxN x
N x q x dxN x
r xP N q dx N x dx N x q x dx
q xN x
N x r x dxN x
N x q x dx
⎧ ⎫⎪ ⎪
⎡ ⎤ ⎪ ⎪⎢ ⎥ ⎪ ⎪⎢ ⎥ ⎪ ⎪⎧ ⎫⎪ ⎪ ⎪ ⎪⎢ ⎥= = =⎨ ⎬ ⎨ ⎬⎢ ⎥ ⎪ ⎪⎩ ⎭ ⎪ ⎪⎢ ⎥ ⎪ ⎪⎢ ⎥ ⎪ ⎪⎣ ⎦
⎪ ⎪⎪ ⎪⎩ ⎭
∫∫
∫ ∫ ∫∫∫
(3.43)
Trường hợp với tải trọng phân bố đều: ( ) ( )ons ; onsq x q c t r x r c t= = = = ; ta có

Bài giảng FEM
Page 74 / 134
{ }23 5
2 8 2 8 8q e
rl ql rl ql qlP⎧ ⎫
= − −⎨ ⎬⎩ ⎭
(3.44)
b, Lực tập trung và momen tập trung.
Cho lực tập trung và mô men tập trung như trên hình ; ta có:
{ }
( )( )
( )( )( )
( )
( )( )
( )( ) ( )
( )( ) ( )( ) ( )
1 1
22 2 2
4 4
33 3 3
55 5 5
00 .'0 . ' .00 .
'0 . ' .'0 . ' .
q e
N l N l TN lN l N l P N l M
TP N l M N l T
PN lN l N l P N l MN lN l N l P N l M
η ηγμ μ γ
η ηγμ μ γγμ μ γ
⎡ ⎤ ⎡ ⎤⎡ ⎤⎢ ⎥ ⎢ ⎥⎢ ⎥ +⎢ ⎥ ⎢ ⎥⎢ ⎥⎧ ⎫⎢ ⎥ ⎢ ⎥⎢ ⎥= + =⎨ ⎬⎢ ⎥ ⎢ ⎥⎢ ⎥⎩ ⎭ +⎢ ⎥ ⎢ ⎥⎢ ⎥⎢ ⎥ ⎢ ⎥⎢ ⎥ +⎣ ⎦⎣ ⎦ ⎣ ⎦
Trường hợp lực tập trung và mô men tập trung đặt tại giữa nhịp:
{ } 5 9 11 9 32 16 8 2 16 8 16 8
T
q e
T P M T P M Pl MPl l
⎧ ⎫⎛ ⎞ ⎛ ⎞ ⎛ ⎞= − + − −⎨ ⎬⎜ ⎟ ⎜ ⎟ ⎜ ⎟⎝ ⎠ ⎝ ⎠ ⎝ ⎠⎩ ⎭
3.2.4. Phần tử thanh 2 đầu khớp.
Cũng như các phần tử đã xét, hệ dàn có trình tự tính toán tương tự như hệ dầm và
khung chịu tải trọng.
Ma trận độ cứng của các phần tử trong hệ tọa độ phần tử có 4 thành phần lấy với c
=1, s= 0, ta có :
Ma trận chuyển tọa độ theo (3....) , ta có :
Ma trận độ cứng của các phần tử thanh dàn trong hệ tọa độ kết cấu :
[ ] [ ] [ ] [ ]
2 2
2 2
2
2dx
T
e e e e
c cs c css cs sEAK T K T
L c css
⎡ ⎤− −⎢ ⎥− −⎢ ⎥′ = =⎢ ⎥⎢ ⎥⎣ ⎦
Khi học môn cơ học kết cấu tính toán hệ dàn ta đã sử dụng các giả thiết các phần tử
dàn là các thanh thẳng, hai đầu liên kết khớp lý tưởng và tải trọng chỉ tác dụng tại các
nút dàn. Do đó, nội lực trong các thanh dàn chỉ có lực dọc là hằng số suốt dọc chiều
dài thanh. Vec tơ tải trọng nút tác dụng lên dàn chỉ có {P’n}. Vì thế, ta có thể biểu diễn
công thức tính nội lực đơn giản như sau :
Theo công thức (), ta có công thức tính nội lực tại các nút như sau :
{S}e = [K]e.[T]e.{δ’}e- {Pq}e = [λ]e.{δ’}e

Bài giảng FEM
Page 75 / 134
Trong đó :
{δ’}e : vec tơ chuyển vị nút phần tử thứ e trong hệ tọa độ kết cấu, được xác định
dựa trên vec tơ {δ∗} và các điều kiện biên.
{Pq}e = 0 do tải trọng không tác dụng trên thanh.
[λ]e = [K]e.[T]e
[ ] [ ] [ ] 0 0 0 0
0 0 0 0
e e e
c c c sEAT KL c s c s
λ
⎡ ⎤− −⎢ ⎥⎢ ⎥= =⎢ ⎥− −⎢ ⎥⎣ ⎦
Khai triển công thức ta có :
[ ] 0 0 0 0
0 0 0 0
ix i
iy ie
kx k
ky k
N uc c c sN vEASN uL c s c sN v
⎧ ⎫ ⎧ ⎫⎡ ⎤− −⎪ ⎪ ⎪ ⎪⎢ ⎥⎪ ⎪ ⎪ ⎪⎢ ⎥= =⎨ ⎬ ⎨ ⎬⎢ ⎥− −⎪ ⎪ ⎪ ⎪⎢ ⎥⎪ ⎪ ⎪ ⎪⎣ ⎦ ⎩ ⎭⎩ ⎭
3.3. ÁP DỤNG PTHH TRONG TÍNH TOÁN HỆ KHUNG, DẦM PHẲNG.
Các bước tính bài toán kết cấu theo phương pháp PTHH.
Bước 1 :Thiết lập các thông số bài toán.
- Rời rạc hóa kết cấu : đánh số phần tử, đặt tên nút, chọn hệ tọa kết cấu.
- Lập bảng số mã, đồng thời xử lý điều kiện biên (cho số mã bằng không ứng với
chuyển vị nút mà tại đó đặt các liên kết nối với nền móng làm nó không có
chuyển vị).
- Lập vec tơ chuyển vị nút của toàn hệ kết cấu {δ*}.
Bước 2 : Lập ma trận độ cứng.
- Thiết lập ma trận độ cứng của từng phần tử theo hệ tọa độ phần tử.
- Thiết lập ma trận độ cứng của phần tử theo hệ tọa độ kết cấu ( bằng phép
chuyển tọa độ).
- Ghép nối các ma trận độ cứng của các phần tử theo số mã tổng thể lập được
ma trận độ cứng theo hệ tọa độ kết cấu [K*].

Bài giảng FEM
Page 76 / 134
Bước 3 : Xác định vec tơ tải.
Xác định riêng tải trọng tác dụng trên thanh và tác dụng tại nút.
- Xác định tải trọng quy nút {Pq}e của từng phần tử do tải trọng tác dụng trên
thanh xét trên hệ tọa độ phần tử.( Tra bảng phụ lục hoặc bảng tra PP chuyển vị
của cơ học kết cấu).
- Chuyển các vec tơ tải trọng quy nút từ hệ tọa độ phần tử về hệ tọa độ kết cấu.
{P’q}e=[T]Te*{Pq}e
- Dựa và bảng số mã toàn thể, ghép nối các vec tơ tải trọng quy nút .
- Lập vec tơ tải trọng tải trọng nút do tải trọng tác dụng tại nút gây ra theo hệ
tọa độ kết cấu :{P’n}e .
- Tính vec tơ tải trọng nút tổng thể có xét tới điều kiện biên :
{F*}={P’q}e +{P’n}e
Bước 4 : Giải phương trình cân bằng.
[K*]{δ*}={F*}
Bước 5 : Xác định vec tơ nội lực .
Theo.... ta có nội lực tại các nút phần tử được sắp xếp thành vec tơ nội lực nút của
phần tử.
{S}e=[K]e*{δ}e
Trường hợp tổng quát, trong phần tử có tải trọng tác dụng thì vec tơ nội lực tại các
điểm nút {S}e còn phải thên vào nội lực tại các điểm nút do tải trọng tác tác dụng
trong phần tử gây ra.Nội lực tại các điểm nút do tải trọng đặt trong phần tử gây ra
này chính là phản lực tại các liên kết nút và bằng vec tơ tải trọng nút {Pq}e của
phần tử nhưng trái dấu.Vì vậy ta có :
{S}e = [K]e.{δ}e- {Pq}e
Mà ta lại có mối liên hệ :{δ}e=[T]e.{δ’}e
Thay ... vào … ta có :
{S}e = [K]e.[T]e.{δ’}e- {Pq}e {S}e = [λ]e.{δ’}e- {Pq}e

Bài giảng FEM
Page 77 / 134
Trong đó :
{S}e = {Ni Qi Mi Nk Qk Mk } – vec tơ nội lực của phần tử.
{δ’}e : vec tơ chuyển vị nút của phần tử e trong hệ tọa độ kết cấu được xác đinh dựa
vào vec tơ {δ*} và các điều kiện biên.
Đặt : [λ]e = [K]e.[T]e
Với hệ thanh thẳng, có thể lập sẵn các ma trận [λ]e cho từng lại phần tử thanh.
- Thanh hai đầu liên kết ngàm .
3 3 2 3 3 2
2 2 2 2
3 3 2 3 3 2
2 2 2 2
0 0
12 12 6 12 12 6
6 6 4 6 6 2
0 0
12 12 6 12 12 6
6 6 2 6 6 4
e
EF EF EF EFc s c sl l l l
EJ EJ EJ EJ EJ EJs c s cl l l l l lEJ EJ EJ EJ EJ EJs c s cl l l l l l
EF EF EF EFc s c sl l l l
EJ EJ EJ EJ EJ EJs c s cl l l l l lEJ EJ EJ EJ EJ EJs c s cl l l l l l
λ
⎡ − −
− − −
− −=⎡ ⎤⎣ ⎦
− −
− − − −
− −⎣
⎤⎢ ⎥⎢ ⎥⎢ ⎥⎢ ⎥⎢ ⎥⎢ ⎥⎢ ⎥⎢ ⎥⎢ ⎥⎢ ⎥⎢ ⎥⎢ ⎥⎢ ⎥⎢ ⎥⎢ ⎥⎦
Với :
c = cos α = (x’k-x’i)/l;
s = sin α = (x’k-x’i)/l;
l = sqrt[(x’k - x’i)2+ (y’k - y’i)2]
- Thanh đầu trái ngàm – đầu phải khớp.

Bài giảng FEM
Page 78 / 134
3 3 2 3 3
2 2 2 2
3 2 2 3 3
0
3 3 3 3 3
3 3 3 3 3
0
3 3 3 3 3
e
EF EF EF EFc s c sl l l lEJ EJ EJ EJ EJs c s cl l l l lEJ EJ EJ EJ EJs c s cl l l l l
EF EF EF EFc s c sl l l l
EJ EJ EJ EJ EJs c s cl l l l l
λ
⎡ ⎤− −⎢ ⎥⎢ ⎥⎢ ⎥− −⎢ ⎥⎢ ⎥⎢ ⎥=⎡ ⎤ − −⎣ ⎦ ⎢ ⎥⎢ ⎥⎢ ⎥− −⎢ ⎥⎢ ⎥
− − −⎢ ⎥⎣ ⎦
- Thanh đầu trái khớp – đầu phải ngàm.
3 3 3 3 2
3 3 3 3 2
2 2 2 2
0
3 3 3 3 3
0
3 3 3 3 3
3 3 3 3 3
e
EF EF EF EFc s c sl l l lEJ EJ EJ EJ EJs c s cl l l l l
EF EF EF EFc s c sl l l l
EJ EJ EJ EJ EJs c s cl l l l lEJ EJ EJ EJ EJs c s cl l l l l
λ
⎡ ⎤− −⎢ ⎥⎢ ⎥⎢ ⎥− −⎢ ⎥⎢ ⎥⎢ ⎥− −=⎡ ⎤⎣ ⎦ ⎢ ⎥⎢ ⎥⎢ ⎥− − −⎢ ⎥⎢ ⎥⎢ ⎥− −⎣ ⎦
- Thanh hai đầu khớp.
Lưu ý rằng khi tính toán bằng máy tính với các phần mềm như excel, matlap,
mathmatica, ... tình việc thiết lập ma trận [λ]e là không nhất thiết .
3.3 ÁP DỤNG PTHH TRONG TÍNH TOÁN HỆ CHỊU TÁC DỤNG CỦA NHIỆT
ĐỘ THAY ĐỔI VÀ CHUYỂN VỊ BAN ĐẦU.
Trình tự và cách tính hệ thanh phẳng chịu tác dụng của các nguyên nhân chuyển
vị ban đầu và thay đổi nhiệt độ cũng tương tự như bài toán chịu tác dụng tải trọng cố
định.
Điểm khác biệt giữa bài toán chịu nguyên nhân tác dụng của chuyển vị ban đầu và
nhiệt độ thay đổi với nguyên nhân tải trọng chính là vec tơ tải trọng nút.
a, Trong trường hợp hệ chịu tác dụng của chuyển vị ban đầu thì vec tơ tải trọng nút là
do chuyển vị cưỡng bức tại các liên kết tựa gây ra và được suy ra từ các phần tử có
liên kết tựa chuyển vị cưỡng bức :
{P’Δ}e = [T]Te *{PΔ}e

Bài giảng FEM
Page 79 / 134
Trong đó :
{PΔ}e : nhận được bằng phản lực liên kết tại đầu phần tử do chuyển vị ban đầu nhưng
dấu ngược lại.
b, Trong trường hợp hệ chịu tác dụng của nhiệt độ, vec tơ tải trọng nút lúc này do nhiệt
độ của môi trường thay đổi được tổng hợp từ các vec tơ tải trọng nút {P’t}
của các phần tử chịu tác dụng của sự thay đổi nhiệt độ.
{P’t}e = [T]Te *{Pt}e
Trong đó :
{Pt}e : nhận được bằng phản lực liên kết tại đầu phần tử do nhiệt độ thay đổi nhưng
dấu ngược lại.

Bài giảng FEM
Page 80 / 134
CHƯƠNG 4. BÀI TOÁN PHẲNG
4.1. GIỚI THIỆU.
PPPTHH có thể tìm nghiệm của bài tốn 3 chiều trong những môi trường liên
tục khác nhau. Trong Cơ học vật rắn, khi mà dạng hình học hoặc tải trọng có thể cho
phép đơn giản bài tốn về 2 chiều. Với bài tốn phẳng ta có thể chia làm 3 trường
hợp:Ứng suất phẳng, Biến dạng phẳng và bài tốn đối xứng trục.
Như vậy là với bài tốn phẳng cần có 8 phương trình: 3 phương trình chuyển vị-
biến dạng, 3 phương trình ứng suất-biến dạng, 2 phương trình cân bằng, để xác định 8
ẩn số trường trong mặt phẳng xy (2 chuyển vị, 3 ứng suất, 3 biến dạng).
4.2. BÀI TOÁN ỨNG SUẤT PHẲNG.
Trạng thái ứng suất phẳng xuất hiện trong kết cấu phẳng với chiều dày
1 0 %h ≤ kích thước nhỏ nhất của vật rắn trong mặt phẳng xy, đồng thời chịu tác
dụng của tải trong mặt phẳng kết cấu. Tại giữa mặt phẳng kết cấu 0z = .
Hình 4-1 Ví dụ ứng suất phẳng 4.2.1. Giả thiết
Tải trọng tác dụng trong mặt phẳng giữa xy với z=0, miền hình học của kết cấu khẳng Ω , điều kiện biên Γ .

Bài giảng FEM
Page 81 / 134
Hình 4-2 Mô hình tốn học
Các thành phần ứng suất , ,zz xz yzσ τ τ bằng không và không có thành
phần ứng suất nào thay đổi dọc theo chiều dầy tấm. Nghĩa là các thành phần ứng suất còn lại , ,xx yy xyσ σ τ chỉ phụ thuộc vào x và y.
Trường chuyển vị, ứng suất, biến dạng phân bố đều theo chiều dày h. Vật liệu đồng nhất, đẳng hướng. Làm việc trong giai đoạn đàn hồi
Hình 4-3 Quy ước về trường ứng suất, biến dạng, nội lực
( , )( , )
( , )x x
y y
u x y uu x y
u x y u⎡ ⎤ ⎡ ⎤
= =⎢ ⎥ ⎢ ⎥⎣ ⎦ ⎣ ⎦
: Vector chuyển vị
( , )( , ) ( , )
2 ( , )
xx x
yy y
xy xy
e x ye x y e x y
e x y
εεγ
⎡ ⎤ ⎡ ⎤⎢ ⎥ ⎢ ⎥= =⎢ ⎥ ⎢ ⎥⎢ ⎥ ⎢ ⎥⎣ ⎦ ⎣ ⎦
: Vector biến dạng

Bài giảng FEM
Page 82 / 134
( , )( , ) ( , )
( , )
xx x
yy y
xy xy
x yx y x y
x y
σ σσ σ σ
σ τ
⎡ ⎤ ⎡ ⎤⎢ ⎥ ⎢ ⎥= =⎢ ⎥ ⎢ ⎥⎢ ⎥ ⎢ ⎥⎣ ⎦ ⎣ ⎦
: Vector ứng suất
xx xx
yy yy
xy xy
pp p h
p
σσσ
⎡ ⎤ ⎡ ⎤⎢ ⎥ ⎢ ⎥= =⎢ ⎥ ⎢ ⎥⎢ ⎥ ⎢ ⎥⎣ ⎦ ⎣ ⎦
: Vector nội lực; x
y
bb
b⎡ ⎤
= ⎢ ⎥⎣ ⎦
: Vector ngoại lực(lực khối)
4.2.2. Các phương trình cơ bản của bài tốn ứng suất phẳng
Phương trình Chuyển vị-Biến Dạng
/ 00 /
2 / /
xx xx
yy yy
xy y x
eu
eu
e De
u⎡ ⎤ ⎡ ⎤∂ ∂
⎡ ⎤⎢ ⎥ ⎢ ⎥= ∂ ∂ = ⇔⎢ ⎥⎢ ⎥ ⎢ ⎥⎣ ⎦⎢ ⎥ ⎢ ⎥∂ ∂ ∂⎣ ⎦
=∂⎣ ⎦
(4.1)
Phương trình Ứng suất-Biến Dạng
11 12 13
12 22 23 2
13 23 33
1 01 0
12 1 20 0
2
xx xx xx
yy yy yy
xy xy xy
E E E e eEE E E e e
Ee
eE
E E e
σ υσ υ
υσ υ
σ
⎡ ⎤⎢ ⎥⎡ ⎤ ⎡ ⎤ ⎡ ⎤⎡ ⎤⎢ ⎥⎢ ⎥ ⎢ ⎥ ⎢ ⎥⎢ ⎥= = ⇔⎢ ⎥⎢ ⎥ ⎢ ⎥ ⎢ ⎥⎢ ⎥ − ⎢ ⎥⎢ ⎥ ⎢ ⎥ ⎢ ⎥⎢ ⎥ −⎣ ⎦⎣ ⎦ ⎣ ⎦ ⎣ ⎦⎢ ⎥
=
⎣ ⎦
(4.2a)
( )
1 01 1 0
2 0 0 2 1
xx xx
yy yy
xy xy
ee
Ee
υ σμ σ
υ σ
⎡ ⎤ ⎡ ⎤−⎡ ⎤⎢ ⎥ ⎢ ⎥⎢ ⎥= −⎢ ⎥ ⎢ ⎥⎢ ⎥⎢ ⎥ ⎢ ⎥⎢ ⎥+⎣ ⎦⎣ ⎦ ⎣ ⎦
(4.2b)
Phương trình cân bằng
/ 0 / 00 / /
00
xxTx y x
yyy x y
xy
Db
bb
σσσ
σ
⎡ ⎤∂ ∂ ∂ ∂⎡ ⎤ ⎡ ⎤ ⎡ ⎤⎢ ⎥ + = ⇔⎢ ⎥ ⎢ ⎥ ⎢ ⎥⎢ ⎥∂ ∂ ∂ ∂ ⎣ ⎦⎣ ⎦ ⎣ ⎦⎢⎣
+
⎦
=⎥
(4.3)
Đồng thời:
( )1zz xx yye e eυ
υ−
= +−
(4.4a)
Và 2 2 0yz yz yz zxe eγ γ= = = = (4.4b)
4.2.3. Điều kiện biên

Bài giảng FEM
Page 83 / 134

Bài giảng FEM
Page 84 / 134
Hình 4-4 Điều kiện biên
Điều kiện biên chuyển vị: ˆu u= trên uΓ
Điều kiện biên tải trọng: ˆ ˆ ˆtn n nt nnt t tσ σ σ→ → → →
= = + = + trên tΓ
Nếu đưa vào vật rắn một hệ trục tọa độ Đề các thì ta sẽ biểu diễn điều kiện cân bằng tải trọng như sau:
ˆ ˆ ˆ
ˆ ˆ ˆnn nx x ny y n x x y y
nt nx y ny x n x y y x
n n t t n t n
n n t t n t n
σ σ σ
σ σ σ
= + = = +
= − + = = − + (4.5)
Mặt khác thì ứng suất trên bề mặt phần tử còn được biểu diễn thông qua phương trình chuyển đổi ứng suất Cauchy như sau:

Bài giảng FEM
Page 85 / 134
Hình 4-5 Cân bằng ứng suất trên biên
00
xxnx xx x xy y x y
n yyny xy x yy y y x
xy
n n n nn n n n
σσ σ σ
σ σσ σ σ
σ
⎡ ⎤+⎡ ⎤ ⎡ ⎤ ⎡ ⎤ ⎢ ⎥= = =⎢ ⎥ ⎢ ⎥ ⎢ ⎥ ⎢ ⎥+⎣ ⎦ ⎣ ⎦ ⎣ ⎦ ⎢ ⎥⎣ ⎦
(4.6)
4.2.4. Phương pháp giải bài tốn phẳng
Hình 4-6 Biểu đồ Tonti-Dạng mạnh của phương trình vi phân khi giải bài tốn ứng
suất phẳng. Hộp màu vàng biểu diễn ứng xử của môi trường trong khi hộp màu cam biểu diễn trường chưa biết.
Bài tốn ở DẠNG MẠNH (Hình 4.6) xác định nghiệm trường bằng phương pháp GIẢI TÍCH nghĩa là việc tìm nghiệm được xác định bằng cách TÍCH PHÂN các phương trình vi phân trên những điều kiện biên đã biết để xác định nghiệm chính xác. Trên biểu đồ được biểu diễn bằng những đường quan hệ màu đen.
Hình 4-7 Tổng thế năng-Dạng yếu của phương trình vi phân khi giải bài tốn ứng
suất phẳng

Bài giảng FEM
Page 86 / 134
Giải bài tốn ở DẠNG YẾU (Hình 4.7) bằng cách đưa phương trình vi phân về dạng BIẾN PHÂN để có thể dụng các nguyên lý năng lượng như: Nguyên lý công khả dĩ(Nguyên lý công ảo), Nguyên lý tổng thế năng (Tổng thế năng tồn phần dừng)…Giải bài tốn ở DẠNG YẾU không cho nghiệm chính xác mà chỉ là nghiệm gần đúng (nghiệm trung bình) bằng cách chọn hàm xấp xỉ để nội suy (Đa thức, Lagrange,
Hermitte…) biến trường bên trong phần tử Ω và trên biên tĩnh học tΓ , một trong
những đặc trưng đó là Hàm Dạng iN .
Giải phương trình vi phân ở Dạng Mạnh cho nghiệm duy nhất còn ở Dạng Yếu thì cho nghiệm gần đúng bởi vì có nhiều cách khác nhau để chọn Hàm Dạng, điều đó được thể hiện bằng đường màu xám liên kết trên Hình 4-7.
Thế năng biến dạng tồn phần:
1 1 ˆ2 2 t
T T TU W he Eed hu bd hu tdΩ Ω Γ
Π = − = Ω − Ω − Γ∫ ∫ ∫ (4.7a)
Năng lượng bên trong-Năng lượng biến dạng:
1 12 2
T TU h ed he EedσΩ Ω
= Ω = Ω∫ ∫
(4.7b)
Công của ngoại lực:
2ˆ1
t
T Tbu d tW h hu dΩ Γ
= Ω + Γ∫ ∫
(4.7c)
b : lực bên trong vật rắn(lực khối); t̂ :lực trên biên vật rắn 4.2.5. Phương trình trên phần tử hữu hạn
4.2.5.1. Rời rạc hóa kết cấu thành n phần tử như hình vẽ.
Phần tử Tốt
Phần tử Tồi

Bài giảng FEM
Page 87 / 134
Hình 4-8 Rời rạc hóa kết cấu
Tại mỗi nút phần tử trong bài tốn ứng suất phẳng có 2 bậc tự do, kết cấu có n phần
tử sẽ có 2n bậc tự do với miền diện tích eΩ và điều kiện biên eΓ .
Vector chuyển vị: 1 1 2 ...Te
x y x xn ynu u u u u u⎡ ⎤= ⎣ ⎦ (4.8)
4.2.5.2. Nội suy trên phần tử
1( , ) ( , )
ne ex i xi
iu x y N x y u
=
= ∑ ;1
( , ) ( , )n
e ey i yi
iu x y N x y u
=
= ∑
1 2
1 2
( , ) 0 0 ... 0( , )
( , ) 0 0 ... 0
e e e exe e ene e e ey n
u x y N N Nu x y u N u
u x y N N N⎡ ⎤ ⎡ ⎤
= = =⎢ ⎥ ⎢ ⎥⎢ ⎥ ⎣ ⎦⎣ ⎦
(4.9)
( , )eiN x y :Hàm Dạng, N :Ma trận Hàm Dạng có kích thước 2 x 2n.
( , ) 1( ); ( , ) 0( )e ei j j i j jN x y i j N x y i j= = = ≠ ;Liên tục
Quan hệ chuyển vị biến dạng:

Bài giảng FEM
Page 88 / 134
1 2
1 2
1 1 2 2
0 0 ... 0
( , ) 0 0 ... 0
...
ee en
ee ee en
e ee e e en n
NN Nx x x
NN Ne x y u Buy y y
N NN N N Ny x y x y x
⎡ ⎤∂∂ ∂⎢ ⎥
∂ ∂ ∂⎢ ⎥⎢ ⎥∂∂ ∂
= =⎢ ⎥∂ ∂ ∂⎢ ⎥
⎢ ⎥∂ ∂∂ ∂ ∂ ∂⎢ ⎥
∂ ∂ ∂ ∂ ∂ ∂⎢ ⎥⎣ ⎦(4.10)
:B D N N= = ∂ Ma trận ứng suất biến dạng có kích thước 3 x 2n
:eEe EBuσ = = Vector ứng suất trên phần tử 4.2.5.3. Năng lượng phần tử-Phương trình Độ Cứng phần tử-Vector tải trọng
Để đạt được phương trình độ cứng phần tử, tổng thế năng biến dạng tồn phần dừng có thể được sử dụng trên từng phần tử riêng
biệt : 0e e eU Wδ δ δΠ = − = (4.11a)
1 12 2e e
e ee T TU h ed he EedσΩ Ω
= Ω = Ω∫ ∫ (4.11b)
1 ˆ2 e e
e ee T TW hu bd hu tdΩ Γ
= Ω + Γ∫ ∫ (4.11c)
Chú ý rằng miền lấy tích phân 2 ở (4.11c) là eΓ trên tồn bộ phần tử chứ
không phải là etΓ bởi vì điều kiện biên sẽ được đưa vào khi giải phương trình tổng
quát của kết cấu (khử điều kiện biên).
Thay , ,e eu N u e Bu Eeσ= = = vào eΠ ở phương trình (4.11)
1 1
2 21 1 =2 2
1= (4.12a) 2
e e
e e
eT T e eT T e
e
e ee T T
e e
e eT e
eu B B u u B B u
u
U h ed he E ed
h E
K
d
u
h
U K
E d
σΩ Ω
Ω Ω
= Ω = Ω =
Ω = Ω
∫ ∫
∫ ∫

Bài giảng FEM
Page 89 / 134
1 ˆ2
1 ˆ =2
1 ˆ 2
(4 .12 b)
e e
e e
e e
e ee T T
e e
e
T eT T eT
eT T T
e e
e
Te
W hu bd hu td
h bd h td
h
N u N
bd h t
u
u N N
ffu
e
d
W
Ω Γ
Ω Γ
Ω Γ
= Ω + Γ =
Ω + Γ
= Ω + Γ
=
∫ ∫
∫ ∫
∫ ∫
1 (42
.12c)e eT ee eTe e eKu u uU fWΠ = − = −
4.2.6. Phần tử tam giác ứng suất phẳng 3 nút
4.2.6.1. Dạng hình học
Phần tử tam giác 3 nút được thể hiện trên hình 4.9, miền hình học được mô ta bởi
tọa độ { },x y . 3 Nút của phần tử lần lượt là i=1,2,3 có tọa độ { },i ix y được đánh đánh thứ tự theo ngược chiều kim đồng hồ. Mỗi nut có 2 bậc tự do là 2 chuyển vị
{ } { }, ,xi yiu v u u≡ theo 2 phương x,y, nghĩa là phần tử tam giác 3 nút có 6 bậc tự do. Diện tích của phần tử tam giác 3 nút:
1 2 3
1 2 3
1 1 11 det2
A x x xy y y
⎡ ⎤⎢ ⎥= ⎢ ⎥⎢ ⎥⎣ ⎦
(4.13).
Diện tích này có thể âm hoặc dương, diện diện tích này mang giá trị dương khi nó quay ngược chiều kim đồng hồ và các nut được đánh số thứ tự i=1,2,3 theo ngược chiều kim đồng hồ.
Hình 4-9 Phần tử tam giác 3 nút chuyển vị tuyến tính, phần tử ứng suất phẳng 3 nút(a)hình học, (b)diện tích và chiều dương của tam giác.

Bài giảng FEM
Page 90 / 134
4.2.6.2. Hệ tọa độ dùng để biểu diễn phần tử
Để biểu diễn dạng hình học của phần tử tam giác 3 nút thì ngồi hệ tọa độ Đề các quen thuộc ta còn có thể biểu diễn nó thông qua hệ tọa độ tự nhiên. Hệ toạ độ tự nhiên còn gọi là hệ toạ độ vật lý, được sử dụng chủ yếu để xây dựng tính chất phần tử. Về tốn, hệ toạ độ tự nhiên liên hệ với hệ toạ độ cục bộ về toạ độ tổng quát qua các phép biến đổi toạ độ. Các phép biến đổi toạ độ được chọn khác nhau tuỳ theo loại phần tử nhưng đều có mục đích biến đổi các toạ độ nút về các giá trị 0 ÷ 1 hay một tập hợp các phân số. Mỗi điểm P (x,y)bất kỳ được xác định bằng tập các toạ độ tự nhiên như sau:
11
AA
ζ = ; 22
AA
ζ = ; 33
AA
ζ = (4.14a)
1 2
11A x
y= 2
2
1xy
3
3
1xy
; 2 1
1
112
A xy
= 1xy
3
3
1xy
; 3 1
1
112
A xy
= 2
2
1xy
1xy
(4.14b) Với A1, A2, A3 lần lượt là diện tích của các tam giác con của tam giác phần tử do điểm P(x,y) chia ra như trên hình 4.10, còn A là diện tích của tam giác phần tử: A1 + A2 + A3 = A và 1 2 3 1ζ ζ ζ+ + = (4.15)
Toạ độ tự nhiên của các nút 1, 2, 3ø: Nút 1 : (1, 0, 0) Nút 2 : (0, 1, 0) Nút 3 : (0, 0, 1)
Toạ độ tự nhiên của các nút tại giữa mỗi cạnh: Cạnh 1-2 (1/2, 1/2, 0) Cạnh 2-3 ( 0, 1/2, 1/2) Cạnh 3-1 (1/2, 0, 1/2)

Bài giảng FEM
Page 91 / 134
A1A2
A3
P
3
1
2
( , )x1 y1
( , )x3 y3
( , )x2 y2(1,0,0)
(0,1,0)
(0,0,1)
yy
x
(x,y)
A1A2
A3
P
3
1
2
( , )x1 y1
( , )x3 y3
( , )x2 y2(1,0,0)
(0,1,0)
(0,0,1)
P( , ,ζ )ζ1 ζ 2 3
y
x
(x,y) u1
1
u1x
u1y
u3x
3y
u
u
u2x
2y
u
u
uuu
ζ =02ζ =0
1
ζ =03
ζ =const2ζ =const1
ζ =const3
P( , ,ζ )ζ1 ζ 2 3
(1,1,0)2 2
(0,1,1)2 2
(1,0,1)2 2
px
py
i
j
k
i
j
k
Hình 4-10 Phần tử tam giác 3 nút chuyển vị tuyến tính được biểu diễn trong hệ tọa độ tự nhiên Quan hệ giữa toạ độ Descartes (x,y) và toạ độ tự nhiên ( )1 2 3, ,ζ ζ ζ có dạng:
⎢⎢⎢
⎣
⎡=
⎪⎭
⎪⎬
⎫
⎪⎩
⎪⎨
⎧
1
1
yx1
yx1
2
2
yx1
1
3 2
33
1xy
ζζζ
⎤ ⎧ ⎫⎪ ⎪⎥⎨ ⎬⎥⎪ ⎪⎥ ⎩ ⎭⎦
(4.16a) Đảo lại ta có quan hệ giữa toạ độ tự nhiên và hệ toạ độ Descartes:
( ) ( ) ( )( ) ( ) ( )( ) ( ) ( )
1 2 3 3 2 2 3 3 2 23 23 32
2 3 1 1 3 3 1 1 3 31 31 13
1 2 2 1 1 2 2 1 12 12 213
1 2 11 1 2
2 22
x y x y y y x x A y xx y x y y y x x x A y x x
A Ax y x y y y x x y A y x y
ζζζ
− − −⎡ ⎤⎧ ⎫ ⎧ ⎫ ⎡ ⎤ ⎧ ⎫⎪ ⎪ ⎪ ⎪ ⎪ ⎪⎢ ⎥ ⎢ ⎥= − − − =⎨ ⎬ ⎨ ⎬ ⎨ ⎬⎢ ⎥ ⎢ ⎥⎪ ⎪ ⎪ ⎪ ⎪ ⎪⎢ ⎥ ⎢ ⎥− − − ⎩ ⎭ ⎣ ⎦ ⎩ ⎭⎩ ⎭ ⎣ ⎦
(4.16b)
Quan hệ vi phân của 2 hệ trục tọa độ:
1 1; ;2 2
i ii i jk kj
i i
x yx y y xx A y Aζ ζ
ζ ζ∂ ∂∂ ∂
= = = =∂ ∂ ∂ ∂
(4.16c)
Trong đó j và k được xác định theo hốn vị vòng tròn của i . Ví dụ nếu i=2 thì j=3 và k=1; ,jk j k jk j kx x x y y y= − = − ; :jkA biểu thị diện tích tam giác trên cạnh có 2 nút i, k trên hệ tọa độ gốc x-y. Đạo hàm riêng của hàm số theo biến x,y trong hệ tọa Đề các được biểu diễn như sau:
23 31 12
1 2 3
32 13 211 2 3
12
12
f f f fy y yx A
f f f fx x xy A
ζ ζ ζ
ζ ζ ζ
⎛ ⎞∂ ∂ ∂ ∂= + +⎜ ⎟∂ ∂ ∂ ∂⎝ ⎠
⎛ ⎞∂ ∂ ∂ ∂= + +⎜ ⎟∂ ∂ ∂ ∂⎝ ⎠
1
23 31 12
32 13 21 2
3
12
ff
y y y fxf x x xAy f
ζ
ζ
ζ
⎡ ⎤∂⎢ ⎥∂∂⎡ ⎤ ⎢ ⎥
⎢ ⎥ ⎢ ⎥⎡ ⎤ ∂∂⎢ ⎥ = ⎢ ⎥⎢ ⎥∂ ∂⎢ ⎥ ⎣ ⎦ ⎢ ⎥⎢ ⎥∂ ⎢ ⎥⎣ ⎦ ∂
⎢ ⎥∂⎣ ⎦
(4.16d) Tích phân mặt có thể tính:

Bài giảng FEM
Page 92 / 134
( )1 2 3
2
! ! !. . .2 ( 0, 0, 0)2 !
. ; . ; . . ;3 6 12
e
e e e
i j k
i i i j
i j kd A i ji kii j k
A A Adxdy dxdy dxdy
ζ ζ ζ
ζ ζ ζ ζ
Ω
Ω Ω Ω
Ω = ≥ ≥ ≥+ + +
= = =
∫
∫ ∫ ∫ (4.17)
Trong đó 0! = 1 4.2.6.3. Phép Nội suy-Hàm Dạng
YÊU CẦU HỘI TỤ
Phương pháp phần tử hữu hạn đưa ra lời giải số cho các bài tốn phức tạp. Vì vậy yêu cầu tự nhiên đặt ra là nghiệm phải hội tụ tới nghiệm chính xác trong các điều kiện nhất định. Người ta chứng minh được là mô hình chuyển vị của phương pháp dẫn tới giới hạn trên của độ cứng thực của kết cấu. Đồng thời khi chia lưới tốt hơn, để nghiệm hội tụ được tới kết quả chính xác thì trước hết hàm chuyển vị xấp xỉ phải thoả mãn 3 điều kiện sau:
1. Hàm chuyển vị phải liên tục bên trong phân tử. Điều kiện này đương nhiên đã đạt được khi chọn hàm xấp xỉ cho biến chuyển vị là đa thức.
2. Hàm chuyển vị phải có khả năng mô tả chuyển dịch phần tử như là các vật rắn tuyệt đối. Nghĩa là khi các nút nhận chuyển dịch như vật rắn tuyệt đối, phần tử không biến dạng do đó không phát sinh ứng lực nút. Các hằng số trong đa thức chuyển vị đảm bảo điều kiện này.
3. Hàm chuyển vị phải có khả năng mô tả trạng thái biến dạng không đổi trong phần tử. Lý do là khi ta chia phần tử ngày càng nhỏ. Kích thước phần tử trở nên vô cùng bé, biến dạng trong mỗi phần tử tiến tới hằng số. Vì vậy hàm chuyển vị giả định phải chứa các thành phần mô tả trạng thái biến dạng không đổi. Đối với các bài tốn đàn hồi một, hai hoặc ba chiều, các thành phần tuyến tính cấp một thoả mãn yêu cầu này. Trong trường hợp của phần tử dầm, tấm và vỏ điều kiện biến dạng không đổi được thay bằng điều kiện độ cong không đổi. Yêu cầu để thoả mãn điều kiện này chúng ta sẽ xét sau.
YÊU CẦU TƯƠNG THÍCH Yêu cầu tương tích thực chất là các yêu cầu liên tục của biến dạng. Yêu cầu này
có nghĩa là khi các phần tử biến dạng, không được phép có gián đoạn về biến dạng giữa các phần tử. Trong trường hợp phần tử dầm, tấm hay vỏ, yêu cầu tương thích đòi hỏi không có sự thay đổi đột biến trong đạo hàm của hàm chuyển vị qua biên giữa các phần tử.
Các phần tử thoả mãn điều kiện tương thích và 3 điều kiện hội tụ được gọi là các phần tử tương thích. Các phần tử vi phạm yêu cầu tương thích được gọi là các phần tử không tương thích. Phần tử không tương thích không phải là không dùng được mà đã có nhiều công trình công bố về phương pháp phần tử hữu hạn, trong đó các phần tử không tương thích được sử dụng thành công. Đôi khi các phần tử không tương thích còn có những tính chất tốt mà các phần tử tương thích không thể có.

Bài giảng FEM
Page 93 / 134
BẤT BIẾN HÌNH HỌC Bên cạnh yêu cầu hội tụ và yêu cầu tương thích, một trong các vấn đề quan
trọng là việc lựa chọn các thành phần trong đa thức chuyển vị giả định. Phần tử phải không có hướng ưu tiên. Đó là dạng chuyển vị không được thay đổi khi thay đổi hệ toạ độ cục bộ. Tính chất này được gọi là đẳng hướng hình học hay bất biến hình học.
Bất biến hình học đạt được nếu như đa thức nội suy chứa mọi thành phần đa thức đủ. Dù sao vẫn có thể đạt được bất biến hình học khi đa thức thiếu nhưng cân bằng. Đa thức cân bằng có thể minh hoạ theo tam giác Pascal viết cho đa thức 2 chiều: 1 x y x2 xy y2 x3 x2y xy2 y3 x4 x3y x2y2 xy3 y4 x5 x4y x3y2 x2y3 xy4 y5 Trục đối xứng
Ví dụ ta muốn xây dựng đa thức 4 thành phần, bất biến hình học đạt được bằng lựa chọn: u = a1 + a2x + a3y + a4xy ; v = a5 + a6x + a7y + a8xy
Như vậy bất biến hình học đạt được bằng cách chọn các thành phần cùng bậc ở cả hai bên của trục đối xứng.
Đối với phần tử tam giác 3 nút trong hệ tọa độ Catestan thì có thể nội suy tuyến tính một đại lượng f(x,y) trên miền xác định của nó ở dạng sau :
0 1 2( , )f x y a a x a y= + + (4.18a)
Trong đó 0 1 2, ,a a a được xác định từ 3 điều kiện. Trong phương pháp phần tử hữu hạn thì 0 1 2, ,a a a được xác định từ 3 điều kiện của hàm ( , )f x y tại 3 nút của phần tử là :
{ }1 2 3( , ) , ,i i if x y f f f= (4.18b)
Trong hệ tọa độ tự nhiên thì hàm số ( , )f x y có thể được nội suy tuyến tính theo dạng sau :
[ ] [ ]1 1
1 2 3 1 1 2 2 3 3 1 2 3 2 1 2 3 2
3 3
( , , )f
f f f f f f f ff
ζζ ζ ζ ζ ζ ζ ζ ζ ζ ζ
ζ
⎡ ⎤ ⎡ ⎤⎢ ⎥ ⎢ ⎥= + + = =⎢ ⎥ ⎢ ⎥⎢ ⎥ ⎢ ⎥⎣ ⎦ ⎣ ⎦
(4.19) XÂY DỰNG HÀM DẠNG CỦA PHẦN TỬ TAM GIÁC 3 NÚT (BẬC 1
HOẶC TUYẾN TÍNH) TRONG HỆ TỌA ĐỘ CARTESIAN. Biến chuyển vị tuyến tính của phần tử tam giác (Hình 4.10) có thể biểu diễn dạng nội suy ĐA THỨC trong hệ toạ độ đề các như sau: 0 1 2( , )x x x xu x y a a x a y= + + ; 0 1 2( , )y y y yu x y a a x a y= + + (4.20a)

Bài giảng FEM
Page 94 / 134
Thế các toạ độ đề các cho nút 1, nút 2, nút 3, ứng với các thành phần chuyển vị nút ( ), , ( 1 3)ix iyu u i = → thu được:
1 0 1 1 2 1
2 0 2 1 2 2
3 0 1 3 2 3
x x x x
x x x
x x x x
u a a x a yu a a x a yu a a x a y
= + +⎧⎪ = + +⎨⎪ = + +⎩
(4.20b) Giải hệ phương trình trên ta có:
3 1 2 3 1 2 2 1 3 1 2 3 1 3 2 2 1 30
3 2 3 2 1 3 1 2 1 3 1 2
x x x x x xx
u x y u y x u y x u y x u y x u x yax y y x x y x y y x y x
− + − + −=
− + − + + −
1 3 1 2 3 2 2 3 2 1 3 11
3 2 3 2 1 3 1 2 1 3 1 2
x x x x x xx
u x u x u x u x u x u xax y y x x y x y y x y x
− + − + −=
− + − + + −
(4.20c)
2 3 2 1 3 1 1 3 1 3 3 22
3 2 3 2 1 3 1 2 1 3 1 2
x x x x x xx
u y u y u y u y u y u yax y y x x y x y y x y x
− + − + − +=
− + − + + −
Thay 0 1 2, ,x x xa a a vào phương trình nội suy 0 1 2( , )x x x xu x y a a x a y= + + và sắp xếp lại dưới dạng ma trận ta có:
[ ]1
1 2 3 2
3
( , ) (x ,y) (x ,y) (x ,y)x
x x
x
uu x y N N N u
u
⎡ ⎤⎢ ⎥= ⎢ ⎥⎢ ⎥⎣ ⎦
(4.21a)
2 3 3 2 2 3 3 21
[( ) ( ) ( )]( , )2
x y x y x y y y x xN x yA
− + − + −=
(4.21b)
3 1 1 3 3 1 1 32
[( ) ( ) ( )]( , )2
x y x y x y y y x xN x yA
− + − + −=
(4.21c)
1 2 2 1 1 2 2 13
[( ) ( ) ( )]( , )2
x y x y x y y y x xN x yA
− + − + −=
(4.21d)
Diện tích 1 1
2 2
3 3
11 det 12
1
x yA x y
x y=
Tương tự như vậy ta cũng có được hàm nội suy chuyển vị ( , )yu x y
[ ]1
1 2 3 2
3
( , ) (x ,y) (x ,y) (x ,y)y
y y
y
uu x y N N N u
u
⎡ ⎤⎢ ⎥= ⎢ ⎥⎢ ⎥⎣ ⎦
(4.21e)

Bài giảng FEM
Page 95 / 134
x1
y1
x x21 2 3
y y21 2 3
x3
y3
uu
u u0 0 0u u0 0 0
uu
N N NN N N
⎡ ⎤⎢ ⎥⎢ ⎥⎢ ⎥⎡ ⎤ ⎡ ⎤
= ⎢ ⎥⎢ ⎥ ⎢ ⎥⎣ ⎦ ⎢ ⎥⎣ ⎦
⎢ ⎥⎢ ⎥⎢ ⎥⎣ ⎦
(4.21f)
P
3
1
2
uu
1P
3
1
2
1
N1
N3
P
3
1
2
N2
1
y uy uyx ux ux
Hình 4-11 Đồ thị hàm dạng của phần tử tam giác 3 nút XÂY DỰNG HÀM DẠNG CỦA PHẦN TỬ TAM GIÁC 3 NÚT (BẬC 1
HOẶC TUYẾN TÍNH) TRONG HỆ TỌA ĐỘ TỰ NHIÊN. Trong bài tốn ứng suất phẳng của phần
tử tam giác 3 nút thì nội suy tuyến tính (4.18) những chuyển vị x y( u , u ) của điểm
1 2 3( , , )P ζ ζ ζ được miêu tả như sau: 1 1 2 2 3 3 1 1 2 2,x x x x y y yu u u u u u uζ ζ ζ ζ ζ= + + = +
(4.22a) Chuyển vị được minh họa trên hình 4-10. Có thể biểu diễn 2 thành phần biến dạng ở (4.20a) dưới dạng ma trận như (4.22b). Trong đó N là ma trận hàm dạng của phần tử Hình 4-12 Nội suy chuyển vị trên
phần tử tam giác 3 nút trong hệ tọa độ TỰ NHIÊN
x1
y1
x x21 2 3
y y21 2 3
x3
y3
uu
u u0 0 0u u0 0 0
uu
eN uζ ζ ζ
ζ ζ ζ
⎡ ⎤⎢ ⎥⎢ ⎥⎢ ⎥⎡ ⎤ ⎡ ⎤
= =⎢ ⎥⎢ ⎥ ⎢ ⎥⎣ ⎦ ⎢ ⎥⎣ ⎦
⎢ ⎥⎢ ⎥⎢ ⎥⎣ ⎦
(4.22b)
4.2.6.4. Phương trình chuyển vị –Biến dạng

Bài giảng FEM
Page 96 / 134
Biến dạng của phần tử e có thể đạt được bằng cách lấy vi phân của hàm dạng với tọa độ x và y. Từ phương trình (4.10) và sử dụng quan hệ của phương trình (4.22) ta có thể xác định được ma trận Ứng suất-Biến dạng B như phương trình (4.23).
x1
y123 31 12
x232 13 21
y232 23 13 31 21 12
x3
y3
uu
0 0 0u1 0 0 0u2uu
e e
y y ye D N u x x x B u
Ax y x y x y
⎡ ⎤⎢ ⎥⎢ ⎥⎡ ⎤ ⎢ ⎥⎢ ⎥= = =⎢ ⎥⎢ ⎥ ⎢ ⎥⎢ ⎥⎣ ⎦ ⎢ ⎥⎢ ⎥⎢ ⎥⎣ ⎦
(4.23) D là tốn tử vi phân biểu diễn sự chuyển đổi giữa ứng suất và biến dạng trên
phần tử. B là ma trận ứng suất-biến dạng. Chú ý rằng với dạng hàm nội suy đã chọn thì biến dạng là hằng số trên tồn bộ phần tử.
4.2.6.5. Phương trình Ứng suất –Biến dạng
Trường ứng suất σ có quan hệ với trường chuyển vị bởi phương trình đàn hồi cở bản được trình bày ở (4.24).
11 12 13
12 22 23
13 23 33
xx xx
yy yy
xy xy
E E E eE E E e E eE E E e
σσ σ
σ
⎡ ⎤ ⎡ ⎤⎡ ⎤⎢ ⎥ ⎢ ⎥⎢ ⎥= = =⎢ ⎥ ⎢ ⎥⎢ ⎥⎢ ⎥ ⎢ ⎥⎢ ⎥⎣ ⎦⎣ ⎦ ⎣ ⎦
(4.24)
ijE là mô đun đàn hồi, các thành phần này là hằng số trên tồn bộ phần tử bởi vì biến dạng là hằng số không đổi.
4.2.6.6. Ma trận độ cứng
Ma trận độ cứng của phần tử một lần nữa được nhắc đến ở đây(4.12).
e
T ee B BK h E dΩ
= Ω∫
Trong đó eΩ là miền khảo sát của phần tư tam giác 3 nút, h là chiều dạy của phần tử. Ma trận tính chuyển vị B và ma trận đàn hồi E là hằng số, đồng thời nếu như chiều dày của phần tử là không đổi trên miền khảo sát thì tích phân (4.12) có thể xác định một cách đơn giản.
e
T ee TK h E d h EB B B BAΩ
= Ω =∫
(4.25a)

Bài giảng FEM
Page 97 / 134
23 32
32 23
31 13
13 31
12 21
11 12 13
12 22
21 12
23
13 23 33
=
(4.25b0
0
40
00
)
0
Te Ay x
x yy x
x
B B
h
K h E
E E
yy x
EE E EE
x y
AE E
⎡ ⎤⎢ ⎥⎢ ⎥⎢ ⎥⎢ ⎥⎢ ⎥⎢ ⎥⎢ ⎥⎢ ⎥⎣
=
⎡ ⎤⎢
⎣
⎦
⎢⎢
=
⎦
23 31 12
32 13 21
32 23 13 31 21 12
0 0 00 0 0y y y
x x xx y x y x y
⎡ ⎤⎢ ⎥⎢ ⎥⎢ ⎥⎣ ⎦
⎥⎥⎥
4.2.6.7. Vector tải trọng nút
Vetor tải trọng nút được nhắc đến 1 lần nữa ở đây bởi phương trình (4.12):
1 ˆ2 e e
e eTe Th bd h tN dNfΩ Γ
Ω + Γ= ∫ ∫
(4.26a)
Ứng với ma trận hàm dạng N đã được biểu diễn ở (4.22) và vetor lực b bên trong vật rắn, ta có:
1
1
2
2
3
3
00
00
00
; (4 .26 ) be e
x
y
T eh bd h bd b
bN
b
ζζ
ζζ
ζζ
Ω Ω
⎡ ⎤⎢ ⎥⎢ ⎥⎢ ⎥⎢ ⎥⎢
⎡ ⎤⎢ ⎥⎣ ⎦⎥
⎢ ⎥
Ω = Ω
⎢ ⎥⎢ ⎥⎣ ⎦
=∫ ∫
Với chú ý từ (4.17) và chiều dày h là không đổi trên phần tử:
1 2 31 (4.26c)3e e e
e e e eAζ ζ ζΩ Ω Ω
Ω = Ω = Ω =∫ ∫ ∫
Và rồi:
(4.26d)3e
TTee
x y x y x yb b bA hh bdN b b bΩ
⎡ ⎤⎣ ⎦Ω =∫ Lực tác dụng trên biên của phần tử được đặc trưng bằng tích phân:
ˆe
eTh tdNΓ
Γ∫
(4.26e)

Bài giảng FEM
Page 98 / 134
Giả sử tải trọng tác dụng trên biên 1-2 của phần tử theo 2 phương x và y như biểu diễn trên hình 4-13. Trên biên 1-2 thành phần tọa độ
tự nhiên 3 0ζ = và do vậy chỉ còn lại 2
thành phần tọa độ 1 2,ζ ζ để mô tả hình học của biên 1-2. Từ phương trình (4-15) ta suy ra phương trình mô tả dạng hình học của biên 1-2:
1 2 1ζ ζ+ =
Hình 4-13 Tải trọng phân bố tuyến tính trên biên 1-2 của phần tử.
Khi phần tử tam giác có chiều dày h không đổi thì ngoại lực phân bố trên một đơn vị chiều dài của phần tử 1-2, q có quan hệ với ngoại lực phân bố trên một đơn vị
diện tích t̂ và chiều dày h như sau: ˆ.q h t= và như vậy ngoại lực phân bố trên một đơn vị chiều dài q của biên 1-2 được biểu diễn như sau:
1 1 2 2 1 2 2 2
1 1 2 2 1 2 2 2
1 2 1 21 2
1 2 1 22 2
(1 )(1 )
1
x x x x x
y y y y y
x x x x x
y y y y y
q q q q qq q q q q
q q q q qq
q q q q q
ζ ζ ζ ζζ ζ ζ ζ
ζ ζζ ζ
= + = − +
= + = − +
−⎡ ⎤ ⎡ ⎤ ⎡ ⎤⎡ ⎤ ⎡ ⎤= = =⎢ ⎥ ⎢ ⎥ ⎢ ⎥⎢ ⎥ ⎢ ⎥
⎣ ⎦ ⎣ ⎦⎣ ⎦ ⎣ ⎦ ⎣ ⎦
(4.26f
)
Thay (4-26f) vào (4-26e) với chú ý (hình 4-11), trên biên 1-2 hàm dạng:
3 3 0N ζ= = và 3
1 2 1 21
1 1 1ii
N N N ζ ζ=
= ⇒ + = ⇔ + =∑
Chiều dài cạnh 1-2:
2 2 2 221 21 21 2 1 2 1( ) ( )eL x y x x y y= + = − + −
21 21 21
21 211 2
12e e
L L
e e eL L LL L
L L Lζ ζ= =∫ ∫

Bài giảng FEM
Page 99 / 134
2121
x1
y1
ex2 12
y2
x
1 2
1 2
1 2
1
3
2
y3
ˆ
fff
2
ˆ
22hLf= =
f 6f 0f 0
2
e e e
T T T
x x
y y
x x
y y
e e e
Lh td dN N N
q qq q
q qq q
dLht qΓ Γ
Γ = Γ =
⎡ ⎤ ⎡ ⎤⎢ ⎥ ⎢ ⎥⎢ ⎥ ⎢ ⎥⎢ ⎥ ⎢ ⎥⎢ ⎥ ⎢ ⎥⎢ ⎥ ⎢ ⎥⎢ ⎥ ⎢ ⎥⎢ ⎥ ⎢ ⎥⎢ ⎥ ⎣ ⎦⎣ ⎦
++
++
∫ ∫ ∫
(4.26g) Tổng quát hóa công thức (4.26g) cho trường hợp tải trọng tác dụng trên bề mặt
phần tử biên phần tử có nut ij,( , , , )xi xj y i y jq q q q
Texi yi xj yj xk yk
eij
f = f , f , f , f , f , f =
2 , 2 , 2 , 2 , 0, 0
(2 .26h)
hL =
6 xi xj yi yj xi xj y j
T
i yq q q q q q q q
⎡ ⎤⎣ ⎦
⎡ + + + ⎤⎣ ⎦+
Để tiện cho việc phân tích tính tốn trong trường hợp lực tập trung thì thường
chọn nút phần tử tại lực tập trung.
4.2.6.8. Phần tử tam giác bậc cao
Trên đây chỉ trình bày cách xây dựng thuộc tính phần tử tam giác 3 nút (bậc 1-tuyến tính) cho bài tốn ứng suất phẳng. Đối với phần tử tam giác bậc cao hơn (hình 4-14), ví dụ tam giác bậc 2 có 6 nút, tam giác bậc 3 có 10 nút thì ta cũng có thể xây dựng phương pháp tính theo đường hướng như tam giác tuyến tính 3 nút.
Hình 4-14 Phần tử tam giác bậc 1, 2, 3

Bài giảng FEM
Page 100 / 134
4.2.6.9. Ví dụ mẫu
Ví dụ 1: Cho chiều dày của kết cấu h= 0.5 in. Mô đun đàn hồi E=30.106 psi
hệ số poisson: 0 .2 5υ = Tính tốn chuyển vị nút và ứng suất trong 2 phần tử.
2
14 (1)
(2)
(3)
1
2
4(2)
2
(3)3 (1)
x
y
x
y
1000 lb300 Psi 1000 lb300 Psi
y
x
1
2
2
14
3
3 in
2 in
1.Đánh số phần tử, Nút, chọn hệ trục tọa độ và xác định tọa độ điểm nút:
Phần tử
Nút 1
Nút 2
Nút 3
Diện tích (sqin)
1 1 2 4 3
2 3 4 2 3
2. Xây dựng thuộc tính trên từng phần tử:
2.1 MA TRẬN ĐỘ CỨNG e iK Tính tốn ma trận ỨNG SUẤT-CHUYỂN VỊ B trên từng phần tử theo phương
trình (4.23):
23 31 12
32 13 21
32 23 13 31 21 12 3 6
0 0 01 0 0 0
2e e
x
y y yB D N u x x x
Ax y x y x y
⎡ ⎤⎢ ⎥= = ⎢ ⎥⎢ ⎥⎣ ⎦
32 3 2 13 1 3 21 2 1
23 2 3 31 3 1 12 1 2
; ;
; ;jk j k
jk j k
x x x x x x x x x x x x
y y y y y y y y y y y y
= − ⇒ = − = − = −
= − ⇒ = − = − = − 1 2 3
1 2 3
1 1 11 d e t2
A x x xy y y
⎡ ⎤⎢ ⎥= ⎢ ⎥⎢ ⎥⎣ ⎦
Ma trận đàn hồi E :
Nút x y
1 3 0
2 3 2
3 0 2
4 0 0

Bài giảng FEM
Page 101 / 134
11 12 137
3 3 12 22 23 2
13 23 33 3 3 3 3
3 3
1 0 3.2 0.8 01 0 0.8 3.2 0 10
11 0 0 1.20 0
2
x
x x
x
E E EEE E E E psi
E E E
υυ
υυ
⎡ ⎤⎢ ⎥⎡ ⎤ ⎡ ⎤⎢ ⎥⎢ ⎥ ⎢ ⎥= = = ×⎢ ⎥⎢ ⎥ ⎢ ⎥− ⎢ ⎥⎢ ⎥ ⎢ ⎥−⎣ ⎦ ⎣ ⎦⎢ ⎥⎣ ⎦
Với phần tử 1:
1 2 3 1 2 30; 2; 0; 3; 3; 0y y y x x x= = = = = =
23 31 12 32 13 212; 0; 2; 3; 3; 0; 3y y y x x x A= = = − = − = = =
1
3 6
2 0 0 0 2 01 0 3 0 3 0 06
3 2 3 0 0 2
e
x
B−⎡ ⎤
⎢ ⎥= −⎢ ⎥⎢ ⎥− −⎣ ⎦
Chú ý rằng có sự khác nhau giữa tên của nút phần tử và nút kết cấu. Nút phần tử được đặt
2
14 (1)
(2)
(3)
1x
y
trong dấu ngoặc theo chiều dương là chiều ngược với chiều kim đồng hồ. Với phần tử 2:
1 2 3 1 2 32; 0; 2; 0; 0; 3y y y x x x= = = = = =
23 31 12 32 13 212; 0; 2; 3; 3; 0; 3y y y x x x A= − = = = = − = =
2
3 6
2 0 0 0 2 01 0 3 0 3 0 06
3 2 3 0 0 2
e
x
B−⎡ ⎤
⎢ ⎥= −⎢ ⎥⎢ ⎥− −⎣ ⎦
Tính tốn ma trận độ cứng phần tử x
y
2
4(2)
2
(3)3 (1)
Ma trận độ cứng của phần tử được tính tốn theo phương trình (4-25)
23 32
32 23
6 6 3 3
131 13
1 12 13
1213 31
6 3 3 6
12 21
21
22 23
13 23 33
12
23
(4.25b)0
00
00
0=
4
0
Tx x
ex x
y xx y
y x
K h E
E
x yy x
x y
E EE E EE E E
B B
y yhA
A
⎡ ⎤⎢ ⎥⎢ ⎥⎢
=
⎡ ⎤⎢ ⎥⎢ ⎥⎢ ⎥⎣ ⎦
=
⎥⎢ ⎥⎢ ⎥⎢ ⎥⎢ ⎥⎢ ⎥⎣ ⎦
31 12
32 13 21
32 23 13 31 21 12
0 00 0 0
yx x x
x y x y x y
⎡ ⎤⎢ ⎥⎢ ⎥⎢ ⎥⎣ ⎦

Bài giảng FEM
Page 102 / 134
1 7
6
1
1
2
2
4
4
1 1 2 4
6
2 4
0.9833 0.5 0.45 0.2 0.5333 0.31.4 0.3 1.2 0.2 0.2
0.45 0 0 0.3.10
1.2 0.2 00.5333
0
.2
0
e
x
x
y
x
y
x
y
x y x y x y
K
sy
uuuuuu
u u u um
u u
− − −⎡ ⎤⎢ ⎥− −⎢ ⎥⎢ ⎥−
= ⎢ ⎥−⎢ ⎥⎢ ⎥⎢ ⎥⎣ ⎦
2 7
6
3
3
4
4
2
2
3 3 4 2
6
4 2
0.9833 0.5 0.45 0.2 0.5333 0.31.4 0.3 1.2 0.2 0.2
0.45 0 0 0.3.10
1.2 0.2 00.5333
00
.2
e
x
x
y
x
y
x
y
x y x y x y
K
sy
uuuuuu
u u u um
u u
− − −⎡ ⎤⎢ ⎥− −⎢ ⎥⎢ ⎥−
= ⎢ ⎥−⎢ ⎥⎢ ⎥⎢ ⎥⎣ ⎦
2.2 VECTOR TẢI TRỌNG NÚT eif
Vector tải trọng được xác định theo công thức (4.26d) cho trường hợp tải trọng bên trong vật rắn (lực khối).
(4.26d)3e
TTee
x y x y x yb b bA hh bdN b b bΩ
⎡ ⎤⎣ ⎦Ω =∫ Công thức (4.26h) cho trường hợp tải trọng tác dụng trên bề mặt phần tử(Chú ý
dạng tải trọng là lực/1 đơn vị diện tích dọc theo biên phần tử ( , , , )xi xj y i y jq q q q
Texi yi x j yj xk yk
e12
f = f , f , f , f , f , f
2 , 2 , 2 , 2 , 0, 0
=
hL =6 xi xj yi yj xi j y
T
x i yjq q q q q q q q
⎡ ⎤⎣ ⎦
⎡ + + + ⎤⎣ ⎦+
Trong trường hợp có tải trọng tập trung thì thường chia phần tử có nut ở vị trí
của lực tập trung. Với phần tử 1: Không có tải trọng tác dung do vậy:

Bài giảng FEM
Page 103 / 134
[ ]T Te1x1 y1 x2 y2 x4 y4f = f , f , f , f , f , f = 0, 0, 0, 0, 0, 0⎡ ⎤⎣ ⎦
Với phần tử 2: Trường hợp tải trọng phân bố trên biên 3-1 trong HỆ TỌA ĐỘ PHẦN TỬ:
[ ]
[ ]
Te2x2 y2 x3 y3 x4 y4
0 0, 2.300 300, 0 0, 30
f = f , f , f
0
, f , f , f
0 .5 .3=6
2.300, 0, 0
2250, 0, 0,, 22 , 05
T
T
+ − − + − −
− −
⎡ ⎤⎣ ⎦
=
3. Lắp ghép để Xây dựng phương trình trên TỒN BỘ KẾT CẤU: Có thể sử dụng phương pháp ma trận định vị hoặc phương pháp ma trận chỉ
số để xây dựng: Ma trận độ cứng của kết cấu K và vector tải trọng của kếùt cấu f .
Phương pháp ma trận định vị iL : Kết cấu có 2en = phần tử, mỗi phần tử được nối với nhau bởi 4nn = Nút và mỗi nút có 2 bậc tự do là 2 thành phần chuyển vị theo 2 phương x,y ( )x i yiu ,u . Bậc tự do của tồn bộ kết cấu là 2 .4 8n = = .Bậc tự do được thể hiện thông qua Vector chuyển vị nút của tồn bộ kết cấu. 8 1 x1 y1 x2 y2 x3 y3 x4 y4 1 8
u u u u u u u uT
x xu ⎡ ⎤= ⎣ ⎦ .Mỗi phần tử tam
giác có 3 Nút, mỗi nút có 2 bậc tự do và do vậy Vector chuyển vị nút 6 1ei
xu của mỗi phần tử có 2.3 6en = = bậc tự do.
Với phần tử 1:
x1
1 y1
1 x2
2 y2
2 x3
4 y3
4 x46 1
y4
8
8
6
1 1
0 0 0 0 0 0 00 0 0 0 0 0 00 0 0 0 0 0 00 0 0 0 0
11
11
10 0
0 0 0 0 0 0 00 0 0 0 0 0
uuuuuuuu1
10
x
y
x
y
x
y x x
xe
uuuuuu
e Luu
⎡ ⎤⎢ ⎥⎢ ⎥⎢ ⎥
= ⎢ ⎥⎢ ⎥⎢ ⎥⎢ ⎥⎣
⎡ ⎤⎢ ⎥⎡ ⎤ ⎢ ⎥⎢ ⎥ ⎢ ⎥⎢ ⎥ ⎢ ⎥⎢ ⎥ ⎢ ⎥⎢ ⎥ ⎢ ⎥⎢ ⎥ ⎢ ⎥⎢ ⎥ ⎢ ⎥⎢ ⎥ ⎢ ⎥⎢ ⎥⎣ ⎦ ⎢ ⎥⎢ ⎥⎣ ⎦
⎦
Với phần tử 2:

Bài giảng FEM
Page 104 / 134
x1
3 y1
3 x2
4 y2
4 x3
2 y3
2 x46 1
y4 8 1
6 8
2
0 0 0 0 0 0 00 0 0 0 0 0 00 0 0 0 0 0 00 0 0 0 0 0 00 0 0 0 0 0 00 0 0 0
u1 u
uu
0
11
1
0 0
uuuu2
11
x
y
x
y
x
y
e
x x
x
uuuuuu
euu
L
⎡ ⎤⎢ ⎥⎢ ⎥⎢ ⎥
= ⎢ ⎥⎢ ⎥⎢ ⎥⎢ ⎥⎣
⎡ ⎤⎢ ⎥⎡ ⎤ ⎢ ⎥⎢ ⎥ ⎢ ⎥⎢ ⎥ ⎢ ⎥⎢ ⎥ ⎢ ⎥⎢ ⎥ ⎢ ⎥⎢ ⎥ ⎢ ⎥⎢ ⎥ ⎢ ⎥⎢ ⎥ ⎢ ⎥⎢ ⎥⎣ ⎦ ⎢ ⎥⎢ ⎥⎣ ⎦
⎦
2
881
11
2
8 ; een
T eix
nT ei
i ee i xe if LK L fK L==
== ∑ ∑
Phương pháp ma trận chỉ số: (Tham khảo các chương 2 phần ghép nối phần tử). 4. Đưa điều kiện biên của kết cấu vào phương trình tồn bộ của kết cấu:
3 3 4 4 1 0x y x y yu u u u u= = = = =
Ma trận độ cứng của kết cấu, sau khi xét điều kiện biên là ma trận 3x3:
1 2
71
2
2
2
0.983 0.45 0.20.45 0.983 0 .10
0.2 0 1.
4
x
y
y
x
x
xK
u u
uuu
u
−⎡ ⎤⎢ ⎥= −⎢ ⎥⎢ ⎥⎣ ⎦
Khử điều kiện biên ta có vector tải của tồn bộ kết cấu:
x1
x2
2y
f 0f= f 0 ( )
f -225-1000
00
-1225lb
⎡ ⎤ ⎡ ⎤⎢ ⎥ ⎢ ⎥= =⎢ ⎥ ⎢ ⎥⎢ ⎥
⎡ ⎤⎢ ⎥⎢ ⎥⎢ ⎥⎣ ⎦⎢ ⎥⎣ ⎦⎣ ⎦
5. Giải hệ phương trình cân bằng của tồn bộ kết cấu trong hệ tọa độ tổng thể: K u = f
1
2
72
0 .983 0.45 0.210 0.45 0.983 0
0.2
00
-11 4 2250 .
x
x
y
uuu
−⎡ ⎤⎢ ⎥−⎢ ⎥⎢ ⎥⎣ ⎦
⎡ ⎡⎤⎢ ⎥ =⎢ ⎥
⎤⎢ ⎥⎢
⎢ ⎥⎣ ⎦⎥
⎢ ⎥⎣ ⎦
2
41
2
0 .233710 0.1068 ( )
-0.9084
x
x
y
inuuu
−
⎡ ⎤⎢ ⎥⎢ ⎥⎢
⎡ ⎤⎢ ⎥ =
⎥⎦⎢ ⎥⎣ ⎦ ⎣⎢ ⎥

Bài giảng FEM
Page 105 / 134
6.Thực hiện phân tích chuyển vị, ứng suất, biến dạng trên từng phần tử. Có thể sử dụng phương pháp ma trận định vị hoặc phương pháp ma trận chỉ
số để tính chuyển vị trên từng phần tử của kết cấu eiu thông qua vector chuyển vị của tồn bộ kết cấu u
Phần tử 1:
11 1 2 2 4 4
4 4 40.2337.10 0 0.1069.10 0.9084.10 0 0
Te Tx y x y x y
T
u u u u u u u
− − −
⎡ ⎤= ⎣ ⎦
⎡ ⎤= −⎣ ⎦
Biến dạng theo công thức (4-23): ei ei eie B u= 4
41
4
0 .2337 .100
0 .1069 .100 .9084 .
2 0 0 0 2 01 0
100
3 0 3 0 06
3 2 3 0 0
0
2
ee
−
−
−
⎡ ⎤⎢ ⎥⎢ ⎥⎢ ⎥
= ⎢ ⎥−⎢ ⎥
⎢ ⎥⎢ ⎥⎢ ⎥⎣
−⎡ ⎤⎢ ⎥−⎢ ⎥⎢ ⎥− −⎣ ⎦
⎦
( )4 41
0 .077910 -0.4542 0.125433333.10
1-0.0634
xxe
zz xx yyyy
xy
ee e
ee e eυ
υ− −
⎡ ⎤⎢ ⎥= ⎢ ⎥⎢
⎡ ⎤−⎢ ⎥= = + =⎢ ⎥ −
⎢ ⎥⎣ ⎦⎥⎣ ⎦
Ứng suất tính theo công thức (4-24):
11 12 13
12 22 23
13 23 33
xx xxei ei
yy yy
xy xy
E E E eE E E e E eE E E e
σσ σ
σ
⎡ ⎤ ⎡ ⎤⎡ ⎤⎢ ⎥ ⎢ ⎥⎢ ⎥= = =⎢ ⎥ ⎢ ⎥⎢ ⎥⎢ ⎥ ⎢ ⎥⎢ ⎥⎣ ⎦⎣ ⎦ ⎣ ⎦
1 1 7 4
3 .2 0 .8 0 0 .077910 . 0 .8 3 .2 0 .10 . -0 .4542
0 0 1.2 -0 .0634
e eE eσ −
⎡ ⎤ ⎡ ⎤⎢ ⎥ ⎢ ⎥= = ⎢ ⎥ ⎢ ⎥⎢ ⎥ ⎢ ⎥⎣ ⎦ ⎣ ⎦
1
-114 .08-1391 .12 ( )
-76 .08
xxe
yy
xy
P siσ
σ σσ
⎡ ⎤⎢ ⎥= ⎢ ⎥⎢ ⎥⎣
⎡ ⎤⎢ ⎥= ⎢ ⎥⎢ ⎥⎣ ⎦⎦
Ứng suất hiệu dụng theo tiêu chuẩn Von Mises:

Bài giảng FEM
Page 106 / 134
2 2 211 22 22 33
1 ( ) ( )2effectiveσ σ σ σ σ⎡= − + − +⎣
2 2 21 2 1 3 2 3 11 2 2 3 33( );σ σ σ σ σ σ+ + + > >
2 2 21 ( ) 32effective xx yy xyσ σ σ σ= − +
1 912 .5678495(P si)eeffectiveσ =
Ứng suất chính:
2
21, 2 2 2
xx yy xx yyeixy
σ σ σ σσ σ
+ −⎛ ⎞= ± +⎜ ⎟
⎝ ⎠
Tiêu chuẩn chảy dẻo Von Mises phẳng σ1,σ2.
1 11 2-109 .56348 72(P si); -1395 .636513(P si)e eσ σ= =
Phương của ứng suất chính: 0
0
1 .510705067 86 .61-1 .629294933 -93 .39
21 .2 2
xy
xx yy
a rctgασ π
σ σ⎡ ⎤
= ± =⎢ ⎥−⎢ ⎥
=⎣ ⎦
Phần tử 2:
23 3 4 4 2 2
4 40 0 0 0 0.1069.10 0.9084.10
Te Tx y x y x y
T
u u u u u u u
− −
⎡ ⎤= ⎣ ⎦
⎡ ⎤= −⎣ ⎦
Biến dạng theo công thức (4-23): ei ei eie B u=
2
4
4
0000
0 .1069 .
2 0 0 0 2 01 0 3 0 3 0 06
3 2 3 0 0 210
0 .9084 .10
ee
−
−
⎡ ⎤⎢ ⎥⎢ ⎥⎢ ⎥
= ⎢ ⎥⎢ ⎥⎢ ⎥⎢
−⎡ ⎤⎢ ⎥−⎢ ⎥⎢ ⎥− −⎣
⎣ ⎦
⎦⎥
−
( )4 42
0 .03563333310 0 -0 .011877778.10
1-0 .3028
xxe
yy
x
zz xx y
y
y
ee e
ee e eυ
υ− −
⎡ ⎤⎢
⎡ ⎤−⎢ ⎥= = + =⎢ ⎥ −
⎢
⎥= ⎢ ⎥⎦ ⎥⎥⎣ ⎣⎢ ⎦
Ứng suất tính theo công thức (4-24):
11 12 13
12 22 23
13 23 33
xx xxei ei
yy yy
xy xy
E E E eE E E e E eE E E e
σσ σ
σ
⎡ ⎤ ⎡ ⎤⎡ ⎤⎢ ⎥ ⎢ ⎥⎢ ⎥= = =⎢ ⎥ ⎢ ⎥⎢ ⎥⎢ ⎥ ⎢ ⎥⎢ ⎥⎣ ⎦⎣ ⎦ ⎣ ⎦
2 2 7 4
3 .2 0 .8 0 0 .03563333310 . 0 .8 3 .2 0 .10 . 0
0 0 1.2 -0 .3028
e eE eσ −
⎡ ⎤ ⎡ ⎤⎢ ⎥ ⎢ ⎥= = ⎢ ⎥ ⎢ ⎥⎢ ⎥ ⎢ ⎥⎣ ⎦ ⎣ ⎦

Bài giảng FEM
Page 107 / 134
2 2
114 .026666728.50666667 ( ); 637 .3769249
-363 .(P si)
36
xxe e
yy effective
xy
P siσ
σ σ σσ
⎡ ⎤⎢ ⎥= =
⎡ ⎤⎢ ⎥= ⎢ ⎥⎢ ⎥⎣
⎢⎢ ⎦
⎥⎥⎣ ⎦
2 21 24 37 .134002 2(P si); -294 .60066 88(P si)e eσ σ= =
Phương của ứng suất chính: 0
0
1 .070000042 61 .337582-2 .069999958 -118 .
266241
12 8
.2
xy
xx yy
a rctgασ π
σ σ⎧⎧⎡ ⎤
= ± =⎢ ⎥−⎢⎣ ⎦
=⎨⎩⎥
⎨⎩
2 in
1000 lb300 Psi
y
x
1
2
2
1
4
3
3 in
2'
1'
2 in
1000 lb300 Psi
y
x
1
22
1
4
3
3 in
yyσ
xxσ
2 in
2/3 in
yyσ
xxσxyσ
xyσ
1
2
Ví dụ 2:Một kết cấu các tấm thép liên kết hàn, chịu kéo như hình. Xác định ứng suất phát sinh trong mối hàn với các dữ kiện số sau:
Kích thước tấm thép: in1021
× , kích thước đoạn nối in4=
Đặc trưng vật liệu thép: 3.0;ksi1029E 3 =×= ν .
Kích thước mối hàn: in21
= .
Đặc trưng vật liệu mối hàn: 3.0;ksi1025E 3 =×= ν .
Lực kéo : ksi15T =
5 in 4 in 5 in
0.5
in
0.5
in
TT
Kết cấu tấm hàn.
Do tính đối xứng, bài tốn được mô hình bởi một nửa mối ghép. Phần tử 5 mang đặc trưng của vật liệu mối hàn, các phần tử còn lại được mô hình cho các tấm thép. Nút 2 cố định, nút 1, 3 không có chuyển vị theo phương x. Các bước tính tốn cụ thể như sau: (các giá trị số cho với đơn vị kip-in, chuyển vị tìm được sẽ có đơn vị là inches và ứng suất là ksi)

Bài giảng FEM
Page 108 / 134
2in 5 in
T1
y
1 23 4
56 7 8
23
4
5
6
7
8
90.5
in0.
5 in
Mô hình phần tử hữu hạn ½ mối ghép. 3.5 Xây dựng các phương trình cho phần tử 1.
Tọa độ nút : ⎥⎦
⎤⎢⎣
⎡→
115.0020
23 31 12
32 13 21
0.5; 1; 29000; 0.30; 0.5; 0.52; 0; 2
A h Ey y yx x x
ν= = = == = = −
= − = =
[ ]⎥⎥⎥
⎦
⎤
⎢⎢⎢
⎣
⎡
−−−
−=
5.025.000220002005.005.000
B T
Ma trận ứng xử cho bài tốn ứng suất phẳng.
39038.5 16730.8 0
39038.5 0sym 11153.8
E⎡ ⎤⎢ ⎥= ⎢ ⎥⎢ ⎥⎣ ⎦
Ma trận độ cứng của phần tử 1 trong hệ tọa độ phần tử.
2
2
6
6
3
3
22307.7 0 0 -5576.92 -22307.7 5576.92 078076.9 8365.38 0 8365.38 -78076.9 0
4879.81 0 -4879.81 8365.38 01394.23 5576.92 -1394.23 0
27187.5 13942.3 079471.2 0
x
y
x
y
x
y
uuuuuusym
⎧ ⎫⎡ ⎤ ⎧⎪ ⎪⎢ ⎥− ⎪ ⎪⎢ ⎥⎪ ⎪⎢ ⎥ ⎪ ⎪ =⎨ ⎬ ⎨⎢ ⎥⎪ ⎪⎢ ⎥⎪ ⎪⎢ ⎥−⎪ ⎪⎢ ⎥⎪ ⎪⎣ ⎦ ⎩ ⎭
⎫⎪ ⎪⎪ ⎪⎪ ⎪
⎬⎪ ⎪⎪ ⎪⎪ ⎪⎩ ⎭
Bậc tự do tồn cục của phần tử : { }65121143
Các ma trận tồn cục sau khi lắp ghép phần tử 1 :

Bài giảng FEM
Page 109 / 134
[ ]
0 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0 00 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0
22307.7 0 -22307.7 5576.92 0 0 0 0 0 -5576.92 0 0 0 0 0 078076.9 8365.38 78076.9 0 0 0 0 8365.38 0 0 0 0 0 0 0
27187.5 13942.3 0 0 0 0 4879.81 5576.92 0 0 0 0 0 079471.2 0 0 0 0 8365.38 1394.23 0 0 0 0 0 0
0 0 0 0 0 0 0 0
K
− −− −
−
=
{ } { }
0 0 0 00 0 0 0 0 0 0 0 0 0 0
0 0 0 0 0 0 0 0 0 00 0 0 0 0 0 0 0 0
4879.81 0 0 0 0 0 0 01394.23 0 0 0 0 0 0
0 0 0 0 0 00 0 0 0 0
0 0 0 00 0 0
0 00
0 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0T
sym
F
⎡ ⎤⎢ ⎥⎢ ⎥⎢ ⎥⎢ ⎥⎢ ⎥⎢ ⎥⎢ ⎥⎢ ⎥⎢ ⎥⎢ ⎥⎢ ⎥⎢ ⎥⎢ ⎥⎢ ⎥⎢ ⎥⎢ ⎥⎢ ⎥⎢ ⎥⎢ ⎥⎢ ⎥⎢ ⎥⎢ ⎥⎢ ⎥⎢ ⎥⎢ ⎥⎢ ⎥⎣ ⎦
=
Các phương trình cho phần tử 2:
2
2
5
5
6
6
4879.81 0 -4879.81 8365.38 0 -8365.38 01394.23 5576.92 -1394.23 -5576.92 0 0
27187.5 -13942.3 -22307.7 8365.38 0.
79471.2 5576.92 -78076.9 022307.7 0 0
sym 78076.9 0
x
y
x
y
x
y
uuuuuu
⎧ ⎫⎡ ⎤ ⎧⎪ ⎪⎢ ⎥⎪ ⎪⎢ ⎥⎪ ⎪⎢ ⎥ ⎪ ⎪ =⎨ ⎬⎢ ⎥⎪ ⎪⎢ ⎥⎪ ⎪⎢ ⎥⎪ ⎪⎢ ⎥⎪ ⎪⎣ ⎦ ⎩ ⎭
⎫⎪ ⎪⎪ ⎪⎪ ⎪⎨ ⎬⎪ ⎪⎪ ⎪⎪ ⎪⎩ ⎭
Các phương trình cho phần tử 3:
1
1
5
5
2
2
22307.7 0 0 -5576.92 -22307.7 5576.92 078076.9 -8365.38 0 8365.38 -78076.9 0
4879.81 0 -4879.81 8365.38 0.
1394.23 5576.92 -1394.23 027187.5 -13942.3 0
sym 79471.2 0
x
y
x
y
x
y
uuuuuu
⎧ ⎫⎡ ⎤ ⎧⎪ ⎪⎢ ⎥⎪ ⎪⎢ ⎥⎪ ⎪⎢ ⎥ ⎪ ⎪ =⎨ ⎬⎢ ⎥⎪ ⎪⎢ ⎥⎪ ⎪⎢ ⎥⎪ ⎪⎢ ⎥⎪ ⎪⎣ ⎦ ⎩ ⎭
⎫⎪ ⎪⎪ ⎪⎪ ⎪⎨ ⎬⎪ ⎪⎪ ⎪⎪ ⎪⎩ ⎭
Các phương trình cho phần tử 4:

Bài giảng FEM
Page 110 / 134
1
1
4
4
5
5
4879.81 0 -4879.81 8365.38 0 -8365.38 01394.23 5576.92 -1394.23 -5576.92 0 0
27187.5 -13942.3 -22307.7 8365.38 0.
79471.2 5576.92 -78076.9 022307.7 0 0
sym 78076.9 0
x
y
x
y
x
y
uuuuuu
⎧ ⎫⎡ ⎤ ⎧⎪ ⎪⎢ ⎥⎪ ⎪⎢ ⎥⎪ ⎪⎢ ⎥ ⎪ ⎪ =⎨ ⎬⎢ ⎥⎪ ⎪⎢ ⎥⎪ ⎪⎢ ⎥⎪ ⎪⎢ ⎥⎪ ⎪⎣ ⎦ ⎩ ⎭
⎫⎪ ⎪⎪ ⎪⎪ ⎪⎨ ⎬⎪ ⎪⎪ ⎪⎪ ⎪⎩ ⎭
Các phương trình cho phần tử 5:
5
5
7
7
6
6
21634.6 12019.2 -16826.9 -4807.69 -4807.69 -7211.54 021634.6 -7211.54 -4807.69 -4807.69 -16826.9 0
16826.9 0 0 7211.54 0.
4807.69 4807.69 0 04807.69 0 0
sym 16826.9 0
x
y
x
y
x
y
uuuuuu
⎧ ⎫⎡ ⎤⎪ ⎪⎢ ⎥⎪ ⎪⎢ ⎥⎪ ⎪⎢ ⎥ ⎪ ⎪ =⎨ ⎬⎢ ⎥⎪ ⎪⎢ ⎥⎪ ⎪⎢ ⎥⎪ ⎪⎢ ⎥⎪ ⎪⎣ ⎦ ⎩ ⎭
⎧ ⎫⎪ ⎪⎪ ⎪⎪ ⎪⎨ ⎬⎪ ⎪⎪ ⎪⎪ ⎪⎩ ⎭
Các phương trình cho phần tử 6:
4
4
7
7
5
5
5576.92 0 0 -5576.92 -5576.92 5576.92 019519.2 -8365.38 0 8365.38 -19519.2 0
19519.2 0 -19519.2 8365.38 0.
5576.92 5576.92 -5576.92 025096.2 -13942.3 0
sym 25096.2 0
x
y
x
y
x
y
uuuuuu
⎧ ⎫⎡ ⎤ ⎧⎪ ⎪⎢ ⎥⎪ ⎪⎢ ⎥⎪ ⎪⎢ ⎥ ⎪ ⎪ =⎨ ⎬⎢ ⎥⎪ ⎪⎢ ⎥⎪ ⎪⎢ ⎥⎪ ⎪⎢ ⎥⎪ ⎪⎣ ⎦ ⎩ ⎭
⎫⎪ ⎪⎪ ⎪⎪ ⎪⎨ ⎬⎪ ⎪⎪ ⎪⎪ ⎪⎩ ⎭
Các phương trình cho phần tử 7:
4
4
8
8
7
7
36598.6 12199.5 2439.9 -3834.13 -39038.5 -8365.38120252. -6622.6 16382.2 -5576.92 -136635.
3137.02 -1742.79 -5576.92 8365.38.
3137.02 5576.92 -19519.244615.4 0
sym 156154.
x
y
x
y
x
y
uuuuuu
⎧ ⎫⎡ ⎤⎪⎢ ⎥⎪⎢ ⎥⎪⎢ ⎥ ⎪⎨⎢ ⎥⎪⎢ ⎥⎪⎢ ⎥⎪⎢ ⎥⎪⎣ ⎦ ⎩
000000
⎧ ⎫⎪ ⎪ ⎪⎪ ⎪ ⎪⎪ ⎪ ⎪⎪ =⎬ ⎨ ⎬⎪ ⎪ ⎪⎪ ⎪ ⎪⎪ ⎪ ⎪⎪ ⎩ ⎭⎭
Các phương trình cho phần tử 8:
8
8
9
9
7
7
39038.5 0 -39038.5 -5576.92 0 -5576.92 3.75136635. -8365.38 -136635. 8365.38 0 0
41826.9 13942.3 -2788.46 -5576.92.
137431. -8365.38 -796.7032788.46 0
sym 796.703
x
y
x
y
x
y
uuuuuu
⎧ ⎫⎡ ⎤⎪ ⎪⎢ ⎥⎪ ⎪⎢ ⎥⎪ ⎪⎢ ⎥ ⎪ ⎪ =⎨ ⎬⎢ ⎥⎪ ⎪⎢ ⎥⎪ ⎪⎢ ⎥⎪ ⎪⎢ ⎥⎪ ⎪⎣ ⎦ ⎩ ⎭
3.75000
⎧ ⎫⎪ ⎪⎪ ⎪⎪ ⎪⎨ ⎬⎪ ⎪⎪ ⎪⎪ ⎪⎩ ⎭
Các điều kiện biên chính cho bài tốn:

Bài giảng FEM
Page 111 / 134
Nút Bậc tự do Giá trị
1 1 0
3 0 2
4 0
3 5 0
Sau khi lắp ghép thực hiện khử các điều kiện biên và giải hệ phương trình tồn
cục ta tìm được các giá trị nút:
}0.00188088,0.00225591 ,0.00198163,0.002463783,0.000425002,0.000610477,0.000202738,0.000337369,0.000258296,0.00047090,0.000320099,0.00059356556,-0.000031968,0.00004657{→
3.6 Kết quả trên phần tử 1.
Hàm nội suy: { }1y2x5.0x5.0y22 −+−−=
Các chuyển vị nút : ⎥⎦
⎤⎢⎣
⎡560.00003195-70.000202730
080.000337360
{ }y
( , ) 0.000168684 xu (x,y) 0.000117346 x - 0.0000639112 y 0.0000319556
{0.000168684 -0.0000639112 0 0.000117346 0 0}
x
T
u x y
ε
=
= +
=
Ma trận ứng xử cho bài tốn ứng suất phẳng.
39038.5 16730.8 039038.5 0
11153.8E
sym
⎡ ⎤⎢ ⎥= ⎢ ⎥⎢ ⎥⎣ ⎦
{ } { }00 1.30886 1.75293 0.327216 5.51588 T =σ
Các ứng suất chính: { }0.0157462 1.75293 5.82735=
Các ứng suất hiệu dụng (von Mises): 5.16689= Tương tự cho các phần tử còn lại, các kết quả tính tốn được như sau:
Kết quả tại nút:
x y ux uy 1 0 0 0 0.0000465768
2 0 0.5 0 0
3 0 1 0 - 0.0000319556
4 2 0 0.000593569 0.00032009
5 2 0.5 0.000470906 0.000258299

Bài giảng FEM
Page 112 / 134
6 2 1 0.000337368 0.000202737
7 2.5 0.5 0.000610472 0.000425003
8 6 0 0.00246378 0.00198163
9 6 0.5 0.00225591 0.00188088
Kết quả trên phần tử:
Phần tử
Tọa độ trọng
tâm phần tử
Chuyển vị của trọng tâm phần tử
Ứng suất tại trọng tâm phần tử
Ứs chính Ứs hiệu dụng
1 2/3
0.833333 0.000112456 0.0000569272
5.51588 0.327216 1.75293 1.30886
0 0
5.82735 1.75293
0.0157462 5.16689
2
4/3 0.666667
0.000269425 0.000153679
7.33255 -0.398766 2.08014
- 1.53842 0 0
7.62743 2.08014
- 0.693643 7.33848
3 2/3
0.333333 0.000156969 0.000101625
7.6332 0.302739 2.38078 1.44051
0 0
7.90611 2.38078
0.0298236 7.00329
4 4/3
0.166667 0.000354825 0.000208322
9.51837 0.140937 2.89779 -1.21096
0 0
9.67222 2.89779
-0.0129162
8.60718
5 2.16667 0.666667
0.000472915 0.000295346
7.79108 0.286201 2.42319
7.8449 2.42319 0.232382
6.78768

Bài giảng FEM
Page 113 / 134
0.637807 0 0
6 2.16667 0.333333
0.000558316 0.000334464
8.82919 -0.154425 2.60243 0.98247
0 0
8.93538 2.60243
-0.260615 8.15076
7 3.5
0.166667 0.00122261
0.000908908
14.8133 -0.202211 4.38334
-0.204803 0 0
14.8161 4.38334
-0.205003 13.3329
8 4.83333 0.333333
0.00177672 0.00142917
14.9819 -
0.0003703494.49444
0.00259244 0 0
14.9819 4.49444
-0.000370798
13.3165
Các phản lực tại gối:
Nút Bật tự do
Phản lực
1 1 -3.82011
2 1 -3.60979
2 2 0
3 1 -0.0701054
Tổng các lực tác dụng: { }05.7→
Tổng các phản lực gối: { }05.7−→
Mô tả biến dạng của các tấm thép. Vì sử dụng một lưới phần tử tương đối thô nên kết quả thu được không thể hiện rõ sự tập trung ứng suất bên trong mối hàn, tuy nhiên kết quả thu được như trên là hợp lý. Để nhận được một kết quả tốt hơn, chúng ta có thể sử dụng lưới mịn.

Bài giảng FEM
Page 114 / 134
Mô hình ban đầu và sau khi biến dạng.
4.2.7. Phần tử chữ nhật suất phẳng 4 nút
4.2.7.1. Dạng hình học
Phần tử chữ nhật 4 nút được thể hiện trên hình 4.15, miền hình học được mô ta bởi
tọa độ Đề các{ },x y hoặc tọa độ tự nhiên ( , )η ξ .4 Nút của phần tử lần lượt là
i=1,2,3, 4 có tọa độ { },i ix y hoặc ( , )i iη ξ được đánh đánh thứ tự theo ngược chiều
kim đồng hồ. Mỗi nut có 2 bậc tự do là 2 chuyển vị { } { }, ,xi yiu v u u≡ theo 2 phương x,y, nghĩa là phần tử tam giác 4 nút có 8 bậc tự
do.Diện tích phần tử có thể âm hoặc dương, diện diện tích này mang giá trị dương khi nó quay ngược chiều kim đồng hồ và các nut được đánh số thứ tự i=1,2,3,4 theo ngược chiều kim đồng hồ.
Hình 4-15 Phần tử chữ nhật 4 nút chuyển
vị tuyến tính.
4.2.7.2. Phép Nội suy-Hàm Dạng
XÂY DỰNG HÀM DẠNG CỦA PHẦN TỬ TAM GIÁC 4 NÚT TRONG
HỆ TỌA ĐỘ ĐỀ CÁC. Phương pháp 1: Nội suy ĐA THỨC

Bài giảng FEM
Page 115 / 134
Biến chuyển vị tuyến tính của phần chữ nhật 4 nút (Hình 4.16) có thể biểu diễn dạng nội suy ĐA THỨC trong hệ toạ độ đề các như sau:
0 1 2 3( , )x x x x xu x y a a x a y a y= + + + (4.27a)
0 1 2 3( , )y y y y yu x y a a x a y a y= + + + (4.27b)
Thế các toạ độ đề các cho nút 1, nút 2, nút 3, nút 4 ứng với các thành phần chuyển vị nút ( ), , ( 1 4)ix iyu u i = → thu được:
y
x
P(x,y)
a
b
1 2
34
(x ,y )1 1(x ,y )2 2
(x ,y )3 3(x ,y )4 4
x1 x2
y1
y1ux4
uy4 uy3
ux3
ux2
uy2
ux1
uy1
uu
yx
Hình 4-16 Phần tử chữ nhật 4 nút trong
hệ tọa độ Đề Các
( )
1 0 1 1 2 1 3 1 1
2 0 1 2 2 2 3 2 2
3 0 1 3 2 3 3 3 3
4 0 1 4 2 4 3 4 4
4 .27
x x x x x
x x x x x
x x x x x
x x x x x
u a a x a y a x yu a a x a y a x y
cu a a x a y a x yu a a x a y a x y
= + + +⎧⎪ = + + +⎪⎨ = + + +⎪⎪ = + + +⎩
Sử dụng chương trình Matlab để Giải hệ phương trình trên ta có:
0xa = -(ux1*x2*y3*x4*y4-ux1*x2*x3*y3*y4-ux1*x3*y2*x4*y4+ux1*x3*x2*y2*y4+ux1*x4*y2*x3*y3-ux1*x4*x2*y2*y3-ux2*x1*y3*x4*y4+ux2*x1*x3*y3*y4+ux2*x3*y1*x4*y4-ux2*x3*x1*y1*y4-ux2*x4*y1*x3*y3+ux2*x4*x1*y1*y3+ ux3*x1*y2*x4*y4- ux3*x1*x2*y2*y4-ux3*x2*y1*x4*y4+ux3*x2*x1*y1*y4+ux3*x4*y1*x2*y2-ux3*x4*x1*y1*y2-ux4*x1*y2*x3*y3+ux4*x1*x2*y2*y3+ux4*x2*y1*x3*y3-ux4*x2*x1*y1*y3-ux4*x3*y1*x2*y2+ux4*x3*x1*y1*y2)/(-x2*y3*x4*y4+x2*x3*y3*y4+x3*y2*x4*y4-x3*x2*y2*y4-x4*y2*x3*y3+x4*x2*y2*y3+x1*y3*x4*y4-x1*x3*y3*y4-x3*y1*x4*y4+x3*x1*y1*y4+x4*y1*x3*y3-x4*x1*y1*y3-x1*y2*x4*y4+x1*x2*y2*y4+x2*y1*x4*y4-x2*x1*y1*y4-x4*y1*x2*y2+x4*x1*y1*y2+x1*y2*x3*y3-x1*x2*y2*y3-x2*y1*x3*y3+x2*x1*y1*y3+x3*y1*x2*y2-x3*x1*y1*y2)
1xa = (ux1*y3*x4*y4-ux1*x3*y3*y4-ux1*y2*x4*y4+ux1*x2*y2*y4+ux1*y2*x3*y3-ux1*x2*y2*y3-ux2*y3*x4*y4+ux2*x3*y3*y4+ux2*y1*x4*y4-ux2*x1*y1*y4-ux2*y1*x3*y3+ux2*x1*y1*y3+ux3*y2*x4*y4-ux3*x2*y2*y4-ux3*y1*x4*y4+ux3*x1*y1*y4+ux3*y1*x2*y2-ux3*x1*y1*y2-ux4*y2*x3*y3+ux4*x2*y2*y3+ux4*y1*x3*y3-ux4*x1*y1*y3-ux4*y1*x2*y2+ux4*x1*y1*y2)/(-x2*y3*x4*y4+x2*x3*y3*y4+x3*y2*x4*y4-x3*x2*y2*y4-x4*y2*x3*y3+x4*x2*y2*y3+x1*y3*x4*y4-x1*x3*y3*y4-x3*y1*x4*y4+x3*x1*y1*y4+x4*y1*x3*y3-x4*x1*y1*y3-x1*y2*x4*y4+x1*x2*y2*y4+x2*y1*x4*y4-x2*x1*y1*y4-x4*y1*x2*y2+x4*x1*y1*y2+x1*y2*x3*y3-x1*x2*y2*y3-x2*y1*x3*y3+x2*x1*y1*y3+x3*y1*x2*y2-x3*x1*y1*y2)
2xa = (-ux1*x3*x4*y4+ux1*x3*y3*x4+ux1*x2*x4*y4-ux1*x2*y2*x4-ux1*x2*x3*y3+ux1*x2*y2*x3+ux2*x3*x4*y4-ux2*x3*y3*x4-ux2*x1*x4*y4+ux2*x1*y1*x4+ux2*x1*x3*y3-ux2*x1*y1*x3-

Bài giảng FEM
Page 116 / 134
ux3*x2*x4*y4+ux3*x2*y2*x4+ux3*x1*x4*y4-ux3*x1*y1*x4-ux3*x1*x2*y2+ux3*x1*y1*x2+ux4*x2*x3*y3-ux4*x2*y2*x3-ux4*x1*x3*y3+ux4*x1*y1*x3+ux4*x1*x2*y2-ux4*x1*y1*x2)/(-x2*y3*x4*y4+x2*x3*y3*y4+x3*y2*x4*y4-x3*x2*y2*y4-x4*y2*x3*y3+x4*x2*y2*y3+x1*y3*x4*y4-x1*x3*y3*y4-x3*y1*x4*y4+x3*x1*y1*y4+x4*y1*x3*y3-x4*x1*y1*y3-x1*y2*x4*y4+x1*x2*y2*y4+x2*y1*x4*y4-x2*x1*y1*y4-x4*y1*x2*y2+x4*x1*y1*y2+x1*y2*x3*y3-x1*x2*y2*y3-x2*y1*x3*y3+x2*x1*y1*y3+x3*y1*x2*y2-x3*x1*y1*y2)
3xa = (ux1*x3*y4-ux1*y3*x4-ux1*x2*y4+ux1*y2*x4+ux1*x2*y3-ux1*y2*x3-ux2*x3*y4+ux2*y3*x4+ux2*x1*y4-ux2*y1*x4-ux2*x1*y3+ux2*y1*x3+ux3*x2*y4-ux3*y2*x4-ux3*x1*y4+ux3*y1*x4+ux3*x1*y2-ux3*y1*x2-ux4*x2*y3+ux4*y2*x3+ux4*x1*y3-ux4*y1*x3-ux4*x1*y2+ux4*y1*x2)/(-x2*y3*x4*y4+x2*x3*y3*y4+x3*y2*x4*y4-x3*x2*y2*y4-x4*y2*x3*y3+x4*x2*y2*y3+x1*y3*x4*y4-x1*x3*y3*y4-x3*y1*x4*y4+x3*x1*y1*y4+x4*y1*x3*y3-x4*x1*y1*y3-x1*y2*x4*y4+x1*x2*y2*y4+x2*y1*x4*y4-x2*x1*y1*y4-x4*y1*x2*y2+x4*x1*y1*y2+x1*y2*x3*y3-x1*x2*y2*y3-x2*y1*x3*y3+x2*x1*y1*y3+x3*y1*x2*y2-x3*x1*y1*y2)
Thay 0 1 2 3, , ,x x x xa a a a vào phương trình nội suy
0 1 2 3( , )x x x x xu x y a a x a y a xy= + + + và sắp xếp lại dưới dạng ma trận ta có:
[ ]
1
21 2 3 4
3
4
( , ) (x ,y) (x ,y) (x ,y) (x ,y)
x
xx
x
x
uu
u x y N N N Nuu
⎡ ⎤⎢ ⎥⎢ ⎥=⎢ ⎥⎢ ⎥⎣ ⎦
(4.27d)
2 21
( )( )( , ) x x y yN x yab
− −= 1 2
2( )( )( , ) x x y yN x y
ab− −
= −
(4.27e)
1 13
( )( )( , ) x x y yN x yab
− −= 2 1
4( )( )( , ) x x y yN x y
ab− −
= −
Tương tự như vậy ta cũng có được hàm nội suy chuyển vị ( , )yu x y
[ ]
1
21 2 3 4
3
4
( , ) (x ,y) (x ,y) (x ,y) (x ,y)
y
yy
y
y
u
uu x y N N N N
u
u
⎡ ⎤⎢ ⎥⎢ ⎥= ⎢ ⎥⎢ ⎥⎢ ⎥⎣ ⎦
(4.27f)

Bài giảng FEM
Page 117 / 134
x 1
y1
x 2
y2x 1 2 3 4
y 1 2 3 4 x 3
y3
x 4
y4
uu
uuu 0 0 0 0
u 0 0 0 0 uu
uu
N N N NN N N N
⎡ ⎤⎢ ⎥⎢ ⎥⎢ ⎥⎢ ⎥
⎡ ⎤ ⎢ ⎥⎡ ⎤=⎢ ⎥ ⎢ ⎥⎢ ⎥
⎣ ⎦⎣ ⎦ ⎢ ⎥⎢ ⎥⎢ ⎥⎢ ⎥⎢ ⎥⎣ ⎦
(4.27g)
Hình 4-17 Đồ thị hàm dạng của phần tử chữ nhật 4 nút trong hệ tọa độ Đề Các được vẽ bằng chương trình Matlab
Phương pháp 2: Nội suy LAGRANGE Áp dụng đa thức Lagrange theo 2 phương x và y ta có:
2 21
1 2 1 2
2 21
( , )
( )( )( , )
x x y yN x yx x y yx x y yN x y
ab
⎛ ⎞ ⎛ ⎞− −= ⎜ ⎟ ⎜ ⎟− −⎝ ⎠ ⎝ ⎠
− −=
1 22
2 1 1 2
1 22
( , )
( )( )( , )
x x y yN x yx x y y
x x y yN x yab
⎛ ⎞ ⎛ ⎞− −= ⎜ ⎟ ⎜ ⎟− −⎝ ⎠ ⎝ ⎠
− −= −
(4.27h)

Bài giảng FEM
Page 118 / 134
1 13
2 1 1 2
1 13
( , )
( )( )( , )
x x y yN x yx x y yx x y yN x y
ab
⎛ ⎞ ⎛ ⎞− −= ⎜ ⎟ ⎜ ⎟− −⎝ ⎠ ⎝ ⎠
− −=
2 14
1 2 2 1
2 14
( , )
( )( )( , )
x x y yN x yx x y y
x x y yN x yab
⎛ ⎞ ⎛ ⎞− −= ⎜ ⎟ ⎜ ⎟− −⎝ ⎠ ⎝ ⎠
− −= −
(4.27i)
[ ]1
21 2 3 4
3
4
( , ) (x ,y) (x ,y) (x ,y) ( , )
x
xx
x
x
uu
u x y N N N N x yuu
⎡ ⎤⎢ ⎥⎢ ⎥=⎢ ⎥⎢ ⎥⎣ ⎦
(4.27j)
[ ]
1
21 2 3 4
3
4
( , ) (x ,y) (x ,y) (x ,y) ( , )
y
yy
y
y
uu
u x y N N N N x yuu
⎡ ⎤⎢ ⎥⎢ ⎥=⎢ ⎥⎢ ⎥⎢ ⎥⎣ ⎦
(4.27k)
x 1
y1
x 2
y2x 1 2 3 4
y 1 2 3 4 x 3
y3
x 4
y4
uu
uuu 0 0 0 0
u 0 0 0 0 uu
uu
N N N NN N N N
⎡ ⎤⎢ ⎥⎢ ⎥⎢ ⎥⎢ ⎥
⎡ ⎤ ⎢ ⎥⎡ ⎤=⎢ ⎥ ⎢ ⎥⎢ ⎥
⎣ ⎦⎣ ⎦ ⎢ ⎥⎢ ⎥⎢ ⎥⎢ ⎥⎢ ⎥⎣ ⎦
(4.27l)
XÂY DỰNG HÀM DẠNG CỦA PHẦN TỬ CHỮ NHẬT 4 NÚT TRONG HỆ TỌA ĐỘ TỰ NHIÊN.
Phương pháp 1: Nội suy ĐA THỨC Biến chuyển vị tuyến tính của phần chữ nhật 4 nút (Hình 4.18) có thể biểu diễn dạng nội suy ĐA THỨC trong hệ toạ độ Tự Nhiên như sau:
0 1 2 3( , )x x x x xu a a a aη ξ η ξ ηξ= + + + (4.28a)
0 1 2 3( , )y y y y yu a a a aη ξ η ξ ηξ= + + + (4.28b) Thế các toạ độ đề các cho nút 1, nút 2, nút 3, nút 4 ứng với các thành phần chuyển vị nút ( ), , ( 1 4)ix iyu u i = → thu được:
P( , )
12
34
ux4
y4 uy3
ux3
ux2
uy2
ux1
uy1
uu
ξ
η
η ξ
(-1,-1) (1,-1)
(1,1)(-1,1)
a
b
y
x
xy
Hình 4-18 Phần tử chữ nhật 4 nút trong
hệ tọa độ Tự Nhiên

Bài giảng FEM
Page 119 / 134
( )
1 0 1 2 3
2 0 1 2 3
3 0 1 2 3
4 0 1 2 3
4 .28
x x x x x
x x x x x
x x x x x
x x x x x
u a a a au a a a a
cu a a a au a a a a
= − − +⎧⎪ = + − −⎪⎨ = + + +⎪⎪ = − + −⎩
Sử dụng chương trình Matlab để Giải hệ phương trình trên ta có:
0xa = 1/4ux1+1/4 ux2+1/4 ux3+1/4 ux4
1xa = -1/4ux1+1/4 ux2+1/4 ux3-1/4 ux4 (4.28d)
2xa = -1/4ux1-1/4 ux2+1/4 ux3+1/4 ux4
3xa = 1/4ux1-1/4 ux2+1/4 ux3-1/4 ux4
Thay 0 1 2 3, , ,x x x xa a a a vào phương trình nội suy 0 1 2 3( , )x x x x xu a a a aη ξ η ξ ηξ= + + + và sắp xếp lại dưới dạng ma trận ta có:
[ ]
1
21 2 3 4
3
4
( , ) ( , ) ( , ) ( , ) ( , )
x
xx
x
x
uu
u N N N Nuu
η ξ η ξ η ξ η ξ η ξ
⎡ ⎤⎢ ⎥⎢ ⎥=⎢ ⎥⎢ ⎥⎣ ⎦
(4.28e)
1 2
3 4
(1 )(1 ) (1 )(1 ); ;4 4
(
( , ) ( , )
( , ) 1 )(1 ) (1 )( , (1;4
) )4
N N
N N
ξ η ξ η ξ η
ξ η ξ η
ξ η
ξ η ξ η
− − + −
+ −=
+ +
= =
=
(4.28f)
Tương tự như vậy ta cũng có được hàm nội suy chuyển vị ( , )yu η ξ
[ ]
1
21 2 3 4
3
4
( , ) ( , ) ( , ) ( , ) ( , )
y
yy
y
y
u
uu N N N N
u
u
η ξ η ξ η ξ η ξ η ξ
⎡ ⎤⎢ ⎥⎢ ⎥= ⎢ ⎥⎢ ⎥⎢ ⎥⎣ ⎦
(4.28g)
x1
y1
x2
y2x 1 2 3 4
y 1 2 3 4 x3
y3
x4
y4
uu
uuu 0 0 0 0
u 0 0 0 0 uu
uu
eN N N NN u
N N N N
⎡ ⎤⎢ ⎥⎢ ⎥⎢ ⎥⎢ ⎥
⎡ ⎤ ⎢ ⎥⎡ ⎤= =⎢ ⎥ ⎢ ⎥⎢ ⎥
⎣ ⎦⎣ ⎦ ⎢ ⎥⎢ ⎥⎢ ⎥⎢ ⎥⎢ ⎥⎣ ⎦
(4.28h)

Bài giảng FEM
Page 120 / 134
Đồ thị hàm dạng 1N Đồ thị hàm dạng 2N
Đồ thị hàm dạng 3N Đồ thị hàm dạng 4N
Hình 4-19 Đồ thị hàm dạng của phần tử chữ nhật 4 nút trong hệ tọa độ TỰ NHIÊN được vẽ bằng chương trình Matlab
Code hàm dạng phần tử chữ nhật 4 nút trong hệ tọa độ đề các: >> x=1:0.1:5; >> y=1:0.1:5; >> [X,Y]=meshgrid(x,y); >> z=((X-5).*(Y-5))/16; >> mesh(z); >> surfc(z); >> surfl(X,Y,z,[90,0.25]); >> surfc(z); >>
Code hàm dạng phần tử chữ nhật 4 nút trong hệ tọa đột tự nhiên: >> x=[-1:0.1:1];

Bài giảng FEM
Page 121 / 134
>> y=[-1:0.1:1]; >> [X,Y]=meshgrid(x,y); >> Z=n1(X,Y); >> surfl(X,Y,Z,[90,0.25]) >> Z2=n2(X,Y); >> surfl(X,Y,Z2,[90,0.25]) >> Z3=n3(X,Y); >> surfl(X,Y,Z3,[90,0.25]) >> Z4=n4(X,Y); >> surfl(X,Y,Z4,[90,0.25]) >> Z4=n4(X,Y); >> surfl(X,Y,Z4,[90,0.25]) >> function z=n1(x,y); z=((1-x).*(1-y))/4; function z=n2(x,y); z=((1+x).*(1-y))/4; function z=n3(x,y); z=((1+x).*(1+y))/4; function z=n4(x,y); z=((1-x).*(1+y))/4;
Phương pháp 2: Nội suy LAGRANGE Áp dụng đa thức Lagrange theo 2 phương x và y ta có:
1 11 1 1( , ) . (1 )(1 ) ( , )
1 1 1 1 4L Nξ ηξ η ξ η ξ η− −
= = − − =− − − −
2 2( 1) 1 1( , ) . (1 )(1 ) ( , )
1 ( 1) 1 1 4L Nξ ηξ η ξ η ξ η− − −
= = + − =− − − −
(4.28i)
3 3( 1) ( 1) 1( , ) . (1 )(1 ) ( , )
1 ( 1) 1 ( 1) 4L Nξ ηξ η ξ η ξ η− − − −
= = + + =− − − −
4 41 ( 1) 1( , ) . (1 )(1 ) ( , )
1 1 1 ( 1) 4L Nξ ηξ η ξ η ξ η− − −
= = − + =− − − −
[ ]1
21 2 3 4
3
4
( , ) ( , ) ( , ) ( , ) ( , )
x
xx
x
x
uu
u N N N Nuu
η ξ η ξ η ξ η ξ η ξ
⎡ ⎤⎢ ⎥⎢ ⎥=⎢ ⎥⎢ ⎥⎣ ⎦
(4.28j)

Bài giảng FEM
Page 122 / 134
[ ]
1
21 2 3 4
3
4
( , ) ( , ) ( , ) ( , ) ( , )
y
yy
y
y
uu
u N N N Nuu
η ξ η ξ η ξ η ξ η ξ
⎡ ⎤⎢ ⎥⎢ ⎥=⎢ ⎥⎢ ⎥⎢ ⎥⎣ ⎦
(4.28k)
x1
y1
x2
y2x 1 2 3 4
y 1 2 3 4 x3
y3
x4
y4
uu
uuu 0 0 0 0
u 0 0 0 0 uu
uu
eN N N NN u
N N N N
⎡ ⎤⎢ ⎥⎢ ⎥⎢ ⎥⎢ ⎥
⎡ ⎤ ⎢ ⎥⎡ ⎤= =⎢ ⎥ ⎢ ⎥⎢ ⎥
⎣ ⎦⎣ ⎦ ⎢ ⎥⎢ ⎥⎢ ⎥⎢ ⎥⎢ ⎥⎣ ⎦
(4.28l) QUAN HỆ GIỮA HỆ TỌA ĐỘ TỰ NHIÊN VÀ HỆ TỌA ĐỘ ĐỀ CÁC
CỦA PHẦN TỬ CHỮ NHẬT 4 NÚT. Phép biến đổi hình học: Một điểm P bất kỳ trong không gian tọa độ Đề Các và hệ tọa độ tự nhiên có mối
quan hệ vói nhau:
1
( , )n
i ii
x N xη ξ=
= ∑ 1
( , )n
i ii
y N yη ξ=
= ∑
(4.29a)
Nút hình học, các đoạn biên của phần tử trong hệ tọa độ Đề Các và hệ tọa độ Tự nhiên là như nhau.
Ma trận Jacobi Quan hệ Vi phân, Đạo hàm bậc 1 trong không gian Đề Các và Tự Nhiên có mối quan hệ với nhau:
;T
x xdx d d
Jdy y y d d
ξ ξξ ηη η
ξ η
∂ ∂⎡ ⎤⎢ ⎥∂ ∂⎡ ⎤ ⎡ ⎤ ⎡ ⎤⎢ ⎥= =⎢ ⎥ ⎢ ⎥ ⎢ ⎥∂ ∂⎢ ⎥⎣ ⎦ ⎣ ⎦ ⎣ ⎦⎢ ⎥∂ ∂⎣ ⎦
Td dx dxx yJ
d dy dyx y
ξ ξξη η η
−
∂ ∂⎡ ⎤⎢ ⎥∂ ∂⎡ ⎤ ⎡ ⎤ ⎡ ⎤⎢ ⎥= =⎢ ⎥ ⎢ ⎥ ⎢ ⎥∂ ∂⎢ ⎥⎣ ⎦ ⎣ ⎦ ⎣ ⎦⎢ ⎥∂ ∂⎣ ⎦
(4.29b)
Với:
11 12
21 22
( , ) (4.29 )( , )
x yJ Jx yJ cJ Jx y
ξ ξξ η
η η
∂ ∂⎡ ⎤⎢ ⎥∂ ∂ ⎡ ⎤∂ ⎢ ⎥= = = ⎢ ⎥∂ ∂∂ ⎢ ⎥ ⎣ ⎦⎢ ⎥∂ ∂⎣ ⎦
là ma trận Jacobi.

Bài giảng FEM
Page 123 / 134
22 121
21 11
( , ) 1 ;( , )
J Jx xJJ Jx y J
y y
ξ ηξ η
−
∂ ∂⎡ ⎤⎢ ⎥ −⎡ ⎤∂ ∂ ∂⎢ ⎥= = = ⎢ ⎥∂ ∂ −∂ ⎢ ⎥ ⎣ ⎦⎢ ⎥∂ ∂⎣ ⎦
1 1 0.
0 1J J − ⎡ ⎤
= ⎢ ⎥⎣ ⎦
(4.29d)
;e e ei i iN N N
x x xξ η
ξ η∂ ∂ ∂∂ ∂
= +∂ ∂ ∂ ∂ ∂
e e ei i iN N N
y y yξ η
ξ η∂ ∂ ∂∂ ∂
= +∂ ∂ ∂ ∂ ∂
(4.29e)
1 1; ;
e en ni i
i ii i
N Nx yx yξ ξ ξ ξ= =
∂ ∂∂ ∂= =
∂ ∂ ∂ ∂∑ ∑1 1
;e en ni i
i ii i
N Nx yx yη η η η= =
∂ ∂∂ ∂= =
∂ ∂ ∂ ∂∑ ∑
(4.29f)
4.2.7.3. Phương trình chuyển vị –Biến dạng
Biến dạng của phần tử e có thể đạt được bằng cách lấy vi phân của hàm dạng
với tọa độ x và y. Từ phương trình (4.10) và sử dụng quan hệ của phương trình (4.29) ta có thể xác định được ma trận Ứng suất-Biến dạng B như phương trình (4.30).
1 2
1 2
1 1 2 2
0 0 ... 0
( , ) 0 0 ... 0
2...
ee en
xx ee ee en
yy
xy e ee e e en n
NN Nx x xe
NN Ne x y e u Buy y y
eN NN N N N
y x y x y x
⎡ ⎤∂∂ ∂⎢ ⎥
∂ ∂ ∂⎢ ⎥⎡ ⎤⎢ ⎥⎢ ⎥ ∂∂ ∂
= = =⎢ ⎥⎢ ⎥ ∂ ∂ ∂⎢ ⎥⎢ ⎥⎣ ⎦ ⎢ ⎥∂ ∂∂ ∂ ∂ ∂
⎢ ⎥∂ ∂ ∂ ∂ ∂ ∂⎢ ⎥⎣ ⎦
(4.30a)
x1
y131 2 4
x2
y231 2 4
x
3 31 1 2 2 4 4
uu
0 0 0 0 uu
0 0 0 0u
ee e e
ee e ee
e ee e e e e e
NN N Nx x x x
NN N Ne DNuy y y y
N NN N N N N Ny x y x y x y x
⎡ ⎤∂∂ ∂ ∂⎢ ⎥
∂ ∂ ∂ ∂⎢ ⎥⎢ ⎥∂∂ ∂ ∂
= = ⎢ ⎥∂ ∂ ∂ ∂⎢ ⎥
⎢ ⎥∂ ∂∂ ∂ ∂ ∂ ∂ ∂⎢ ⎥
∂ ∂ ∂ ∂ ∂ ∂ ∂ ∂⎢ ⎥⎣ ⎦
x1 y1 x2 y2 x3 y3
3
y3
x4
x4 y
y4
4 u u u u u u u u
u
uu
eBu
⎡ ⎤⎢ ⎥⎢ ⎥⎢ ⎥⎢ ⎥⎢ ⎥
=⎢ ⎥⎢ ⎥⎢ ⎥⎢ ⎥⎢ ⎥⎢ ⎥⎣ ⎦
(4.30b)
Nếu eiN được biểu diễn trong hệ tọa độ Đề Các thì :

Bài giảng FEM
Page 124 / 134
ux1 uy1 ux2 uy2 ux3 uy3 ux
2 2 1 1
2 1 1 2
2 2
4 uy
1 2 1 2 1
4
1
0 0 0 01 0 0 0 0
B B B B
y y y y y y y yB x x x x x x x x
abx x
B B B By y x x y y x x y y x x y y
− − − −⎡ ⎤⎢ ⎥= − − − −⎢ ⎥⎢ ⎥− − − − − − − −⎣ ⎦
(4.30c)
Nếu eiN được biểu diễn trong hệ tọa độ Tự Nhiên thì Ma Trận Ứng suất-Biến
dạng B là hàm số ( , )B B η ξ= được tính tốn thông qua các mối quan hệ Vi phân như đã đề cập ở (4.29) và các TÍCH PHÂN SỐ được sử dụng như Phương pháp NEWTON-COTES, Phương pháp GAUSS.
D là tốn tử vi phân biểu diễn sự chuyển đổi giữa ứng suất và biến dạng trên phần tử. B là ma trận ứng suất-biến dạng. Chú ý rằng với dạng hàm nội suy đã chọn thì biến dạng là hằng số trên tồn bộ phần tử.
4.2.7.4. Phương trình Ứng suất –Biến dạng
Trường ứng suất σ có quan hệ với trường chuyển vị bởi phương trình đàn hồi cở bản được trình bày ở (4.31).
11 12 13
12 22 23
13 23 33
xx xx
yy yy
xy xy
E E E eE E E e E eE E E e
σσ σ
σ
⎡ ⎤ ⎡ ⎤⎡ ⎤⎢ ⎥ ⎢ ⎥⎢ ⎥= = =⎢ ⎥ ⎢ ⎥⎢ ⎥⎢ ⎥ ⎢ ⎥⎢ ⎥⎣ ⎦⎣ ⎦ ⎣ ⎦
(4.31)
ijE là mô đun đàn hồi, các thành phần này là hằng số trên tồn bộ phần tử bởi vì biến dạng là hằng số không đổi.
4.2.7.5. Ma trận độ cứng
Ma trận độ cứng của phần tử một lần nữa được nhắc đến ở đây(4.12).
e
T ee B BK h E dΩ
= Ω∫ (4.32a)
Trong đó eΩ là miền khảo sát của phần tử chữ nhật 4 nút, h là chiều dạy của phần tử.
Thành phần của Ma trận độ cứng được tính như sau:
ei
eeij
i
Ti jB BK h E d
Ω= Ω∫
(4.32b)

Bài giảng FEM
Page 125 / 134
11 12 13 14 15 16 17 18
21 22 23 24 25 26 27 28
31 32 33 34 35 36 37 38
41 42 43 44 45 46 47 48
51 52 53 54 55 56 57 58
61 62 63 64 65 66 67 68
71 72 7
ei
k k k k k k k kk k k k k k k kk k k k k k k kk k k k k k k k
Kk k k k k k k kk k k k k k k kk k k
=
x1 y1 x2 y2 x3 y3 x
3 74 75 76 77 78
81 82 83 84 85 86 8
x1
y1
x2
y2
x3
y3
x4
y4
y
7 8
4 4
8
u u u u u u
uuuuuuuu
u u
k k k k kk k k k k k k k
⎡ ⎤⎢ ⎥⎢ ⎥⎢ ⎥⎢ ⎥⎢ ⎥⎢ ⎥⎢ ⎥⎢ ⎥⎢ ⎥⎢ ⎥⎢ ⎥⎣ ⎦
(4.32c)
Nếu eiN được biểu diễn trong hệ tọa độ Tự Nhiên thì :
1 1
1 1
(
d
, ) d
( , )d d ; ;
e
e Jd d
t
te
T
d dxd
F hB EB
K F y
Jξ
ξ η ξ ξ ηη
η− −
=
=
Ω= =∫ ∫
(4.32d)
1 21 1 1 1
1 11 1 1 1
( , )d d ( , )d ( , )p p
i j i ji j
F d F Fξ η ξ η η ξ η ξ ω ω ξ η= =− − − −
= ≈ ∑ ∑∫ ∫ ∫ ∫
(4.32e) 4.2.7.6. Vector tải trọng nút
Vetor tải trọng nút được nhắc đến 1 lần nữa ở đây bởi phương trình (4.12):
1 ˆ2 e e
e eTe Th bd h tN dNfΩ Γ
Ω + Γ= ∫ ∫
(4.33a)
0 0
0 0
( ; )( ; )
ˆ( ; )e e
Tx yT T T
x y
e ee h bd h tfN
d P Mx y
N N NΩ Γ
∂Ω + +
∂= Γ +∫ ∫
(4.33b)
Ứng với ma trận hàm dạng N đã được biểu diễn ở (4.2.7.2) và vetor lực b bên trong vật rắn, t̂ là lực bề mặt, P là lực tập trung, M là mô men tập trung. 4.2.7.7. Phần tử tứ giác bậc cao
Đối với phần tử tứ giác 8 Nút, 9 Nút (hình 4-20), thì ta cũng có thể xây dựng phương pháp tính theo đường hướng như chữ nhật tuyến tính 4 nút.
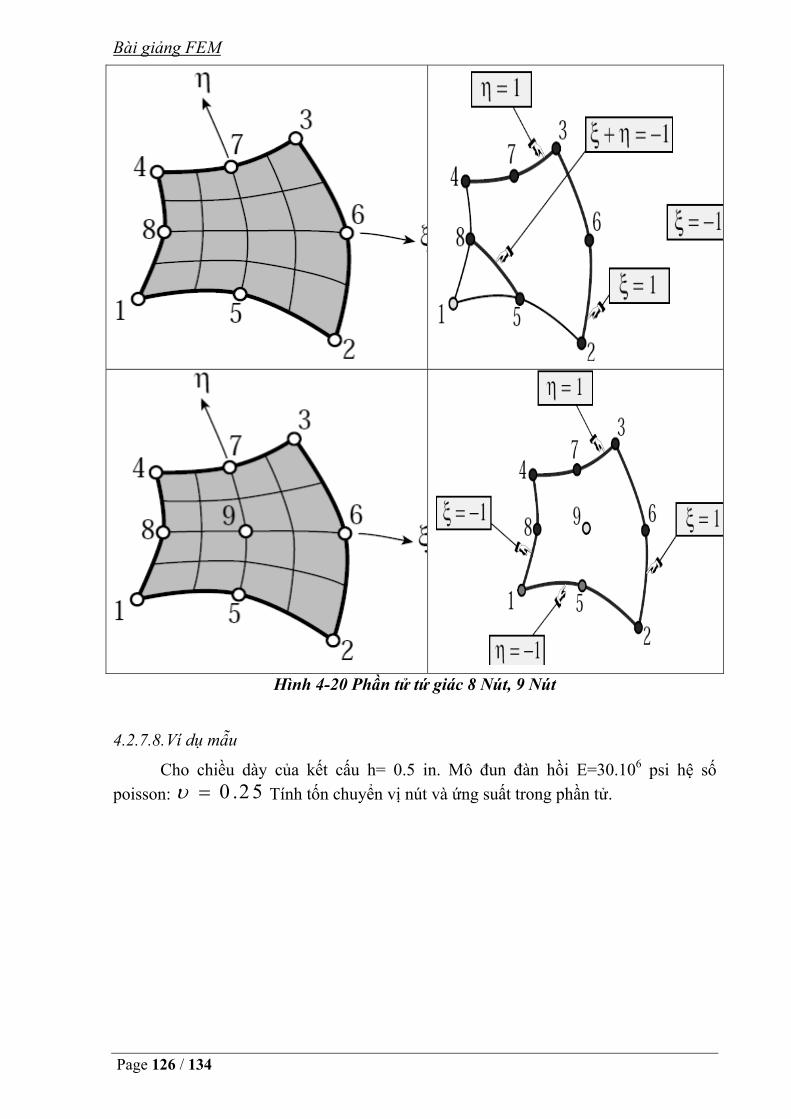
Bài giảng FEM
Page 126 / 134
Hình 4-20 Phần tử tứ giác 8 Nút, 9 Nút 4.2.7.8. Ví dụ mẫu
Cho chiều dày của kết cấu h= 0.5 in. Mô đun đàn hồi E=30.106 psi hệ số poisson: 0 .2 5υ = Tính tốn chuyển vị nút và ứng suất trong phần tử.

Bài giảng FEM
Page 127 / 134
1000 lb300 Psi 1000 lb300 Psi
y
x
1
3
21
4
3 in
1
1(1) x
y
2
(2)
(3)3
(4)
4
2 in
1.Đánh số phần tử, Nút, chọn hệ trục tọa độ và xác định tọa độ điểm nút:
2. Xây dựng thuộc tính trên từng phần tử:
2.1 MA TRẬN ĐÀN HỒI eiE
11 12 137
3 3 12 22 23 2
13 23 33 3 3 3 3
3 3
1 0 3.2 0.8 01 0 0.8 3.2 0 10
11 0 0 1.20 0
2
x
x x
x
E E EEE E E E psi
E E E
υυ
υυ
⎡ ⎤⎢ ⎥⎡ ⎤ ⎡ ⎤⎢ ⎥⎢ ⎥ ⎢ ⎥= = = ×⎢ ⎥⎢ ⎥ ⎢ ⎥− ⎢ ⎥⎢ ⎥ ⎢ ⎥−⎣ ⎦ ⎣ ⎦⎢ ⎥⎣ ⎦
2.2 HÀM DẠNG eiN
Sử dụng công thức hàm dạng trong hệ tọa độ Đề Các đã được chứng minh ở phương trình (4.27).
2 21
( )( )( , ) x x y yN x yab
− −= 1 2
2( )( )( , ) x x y yN x y
ab− −
= −
(4.27e)
1 13
( )( )( , ) x x y yN x yab
− −= 2 1
4( )( )( , ) x x y yN x y
ab− −
= −
Phần tử
Nút 1
Nút 2
Nút 3
Nút4
Chiềudày h (in)
1 1 2 3 4 0.5
n … … … … …
Nút x y
1 0 0
2 3 0
3 3 2
4 0 2

Bài giảng FEM
Page 128 / 134
1( 3)( 2)( , ) ;
6x yN x y − −
= 2( 0)( 2)( , )
6x yN x y − −
= −
3( 0)( 0)( , )
6x yN x y − −
= 4( 3)( 0)( , )
6x yN x y − −
= −
2.3 MA TRẬN CHUYỂN VỊ-BIẾN DẠNG eiB Tính tốn ma trận ỨNG SUẤT-CHUYỂN VỊ B trên từng phần tử theo phương
trình (4.30):
ux1 uy1 ux2 uy2 ux3 uy3 ux4 uy4
2 2 1 11
2 1 1 2
2 2 1 2 1 1 2 1
0 0 0 01 0 0 0 0
y y y y y y y yB x x x x x x x
B B B B B B
xab
x x y y x x y y x x y y x x y yB B
− − − −⎡ ⎤⎢ ⎥= − − − −⎢ ⎥⎢ ⎥− − − − − − − −⎣ ⎦
ux1 uy1 ux2 uy2 ux3 uy3 ux4
1
uy4
2 0 2 0 0 0 0 0
1 0 3 0 0 0 0 0 36
3 2 0 2 0 0 3
0
y y y yB x x x x
x y xB B B B B B
y x y x yB B
− − − −⎡ ⎤⎢ ⎥= − − − −⎢ ⎥⎢ ⎥− − − − − − − −⎣ ⎦
2.4 MA TRẬN ĐỘ CỨNG CỦA TỪNG PHẦN TỬ e iK Bài tốn chỉ có 1 phần tử, ma trận độ cứng của phần tử được tính tốn theo phương trình (4-32). với các thành phần của Ma trận độ cứng được tính theo (4.32b):
ei
eeij
i
Ti jB BK h E d
Ω= Ω∫
(4.32b)
Ma trận 18 8xK là ma trận có kích thước 8x8 theo công thức (4.32c)
11 12 13 14 15 16 17 18
21 22 23 24 25 26 27 28
31 32 33 34 35 36 37 38
41 42 43 44 45 46 47 48
51 52 53 54 55 56 57 58
61 62 63 64 65 66 67 68
71 72 7
ei
k k k k k k k kk k k k k k k kk k k k k k k kk k k k k k k k
Kk k k k k k k kk k k k k k k kk k k
=
x1 y1 x2 y2 x3 y3 x
3 74 75 76 77 78
81 82 83 84 85 86 8
x1
y1
x2
y2
x3
y3
x4
y4
y
7 8
4 4
8
u u u u u u
uuuuuuuu
u u
k k k k kk k k k k k k k
⎡ ⎤⎢ ⎥⎢ ⎥⎢ ⎥⎢ ⎥⎢ ⎥⎢ ⎥⎢ ⎥⎢ ⎥⎢ ⎥⎢ ⎥⎢ ⎥⎣ ⎦
(4.32c)

Bài giảng FEM
Page 129 / 134
Ví dụ ta tính 133k , theo công thức (4.32b) thì :
( )
12 2
1 3
133
3 3 13 2
8 7 5 2
0 2
3 1
7
2 70.5 0.1067.10 0.533.10 3.33.106
0.656.10
e
Tu
e
x
x y
x uxx x
k h E d
x dxdy
B BΩ
= =
= Ω =
⎡ − ⎤⎛ ⎞= − +⎜ ⎟⎢ ⎥⎝ ⎠⎣ ⎦
=
∫
∫ ∫
Tương tự, tính lần lượt 64 lần và ta có được Ma trận độ cứng của phần tử 1.
2.2 VECTOR TẢI TRỌNG NÚT eif
Vector tải trọng được xác định theo công thức (4.33b).
0 0
0 0
( ; )( ; )
ˆ( ; )e e
Txe yT T Tei e
x y
NN N Nh bd h td P M
xf
yΩ Γ
∂Ω +
∂= Γ + +∫ ∫
Phần tử chữ nhật 4 nút, mỗi nut có 2 bậc tự do và như vậy là phần tử có 8 bậc tự do. Do vậy, Vector của phần tử có 8 thành phần ứng với 8 bậc tự do.
e11x8 x1 y1 x2 y2 x3 y3 x4 y4 1 8
f = f , f , f , f , f , f ,f , fT
x⎡ ⎤⎣ ⎦
Trường hợp tải trọng phân bố đều trên biên 3-4, 3 4ˆ 300( )t Psi− = − trong
HỆ TỌA ĐỘ PHẦN TỬ, Vector tải trọng tại nút 3 và 4 được tính :
ˆ3 3
3
4
13
14
13
14
0 0
ˆ
( , 2) 30.5 .( 300) 0.5 .( 300)3( , 2)
3
225( )
225
ey
ey
e
tx x
x x
y
ey
t
xN x y
dx dxxN x y
fb
f
f
fl
= =
= =
⎡ ⎤⎡ ⎤ ⎢ ⎥=⎡ ⎤
= − = −⎢ ⎥ ⎢ ⎥⎢ ⎥ −=⎢ ⎥ ⎢ ⎥⎣ ⎦⎣ ⎦⎢ ⎥⎣ ⎦
⎡ ⎤ −⎡ ⎤=⎢ ⎥ ⎢ ⎥−⎢ ⎥ ⎣ ⎦⎣ ⎦
∫ ∫

Bài giảng FEM
Page 130 / 134
1
1(1) x
y
2
(2)
(3)3
(4)4
f4y f3y=255(lb)1000 lb
Trường hợp tải trọng tập trung tại Nút 3 cục bộ của phần tử theo phương y ,
1000( )P lb= − trong HỆ TỌA ĐỘ PHẦN TỬ, Vector tải trọng tại nút 3:
[ ]13 1000 ( )e P
y lbf⎡ ⎤ = −⎣ ⎦
Vector tải trọng nút của phần tử 1:
[ ][ ]
e11x8 1 8
e11x8 1 8
0f = 0 0 0 0
0
0 225 1000 225
0 0 0
f = 00 - 1225 225
T
x
T
x
− − −
−
3. Lắp ghép để Xây dựng phương trình trên TỒN BỘ KẾT CẤU: Có thể sử dụng phương pháp ma trận định vị hoặc phương pháp ma trận chỉ
số để xây dựng: Ma trận độ cứng của kết cấu K và vector tải trọng của kếùt cấu f .
Kết cấu chỉ có 1 phần tử nên: 1 ;eK K= 1 ;ef f= 1eu u=
4. Đưa điều kiện biên của kết cấu vào phương trình tồn bộ của kết cấu:
1 1 2 4 4 0x y y x yu u u u u= = = = =
Ma trận độ cứng của kết cấu, sau khi xét điều kiện biên là ma trận 3x3: 1 1 1
33 35 361 1 1
53 55 561 1 1
2
3
3
2 3
63 63 3
3
6
x
x
x
e e e
e e e
ye e e
x y
k k kK k k k
k k u
u
k
uu
u u
⎡ ⎤⎢ ⎥= ⎢ ⎥⎢ ⎥⎣ ⎦
Khử điều kiện biên ta có vector tải của tồn bộ kết cấu:

Bài giảng FEM
Page 131 / 134
x2
x3
y3
f 0f= f 0 ( )
f -225-1000
00
-1225lb
⎡ ⎤ ⎡ ⎤⎢ ⎥ ⎢ ⎥= =⎢ ⎥ ⎢ ⎥⎢ ⎥
⎡ ⎤⎢ ⎥⎢ ⎥⎢ ⎥⎣ ⎦⎢ ⎥⎣ ⎦⎣ ⎦
5. Giải hệ phương trình cân bằng của tồn bộ kết cấu trong hệ tọa độ tổng thể:
K u = f tính chuyển vị nút 2 3 3 x x y
Tuu u u⎡ ⎤= ⎣ ⎦
6.Thực hiện phân tích chuyển vị, ứng suất, biến dạng trên từng phần tử. Có thể sử dụng phương pháp ma trận định vị hoặc phương pháp ma trận chỉ
số để tính chuyển vị trên từng phần tử của kết cấu eiu thông qua vector chuyển vị của tồn bộ kết cấu u 4.3. Bài tốn Biến dạng phẳng
Các bài tốn khảo sát các vật thể dài trong đó dạng hình học và tải trọng không thay đổi theo hướng dọc trục thường quy về bài tốn biến dạng phẳng. Trên hình 2 dẫn ra một số ví dụ điển hình. Trong các trường hợp này chuyển vị dọc trục w không đổi, ứng với chuyển động tịnh tiến của vật rắn tuyệt đối, còn các chuyển vị thẳng trong z ứng với các chuyển động xoay vật rắn, các chuyển vị này không gây nên biến dạng. Như vậy nếu ta xét tiết diện ngang cách xa đầu nút, ta có thể giả thiết w = 0 còn các chuyển vị u và v chỉ là hàm của các toạ độ x và y chứ không phụ thuộc vào z, từ đó suy ra:
2 2 0e e ezz zz zx zx yz yzε γ γ= == = = = (4.34)
Quan hệ vật liệu cho vật liệu đàn hồi đẳng hướng có dạng:

Bài giảng FEM
Page 132 / 134
( )( )
( )( )
( ) ( )
1 0 11 0 1
1 1 2 1 201 2 20 0
2
xx xx
yy yy
xy xy
eE E Te
e
σ υ υασ υ υ
υ υ υυσ
⎡ ⎤⎢ ⎥⎡ ⎤ ⎡ ⎤− ⎡ ⎤⎢ ⎥⎢ ⎥ ⎢ ⎥ ⎢ ⎥= − −⎢ ⎥⎢ ⎥ ⎢ ⎥ ⎢ ⎥+ − −⎢ ⎥⎢ ⎥ ⎢ ⎥ ⎢ ⎥− ⎣ ⎦⎣ ⎦ ⎣ ⎦⎢ ⎥⎢ ⎥⎣ ⎦
(4.35a)
*.E eσ =
(4.35b) Đồng thời có thể chỉ ra quan hệ:
( ) .zz xx yy E Tσ υ σ σ α= + − (4.36a)
0== zxyz ττ (4.36b)
Giải phương trình (4.35) đối với biến dạng yx εε , và xyγ ta có:
( ) ( ) ( )1 0 1
11 0 1 . 1
0 0 2 02
xx xx
yy yy
x y x y
ee T
Ee
συ υυ
υ υ σ υ α
σ
⎡ ⎤ ⎡ ⎤− −⎡ ⎤ ⎡ ⎤⎢ ⎥ ⎢ ⎥+ ⎢ ⎥ ⎢ ⎥= − − + +⎢ ⎥ ⎢ ⎥⎢ ⎥ ⎢ ⎥⎢ ⎥ ⎢ ⎥⎢ ⎥ ⎢ ⎥⎣ ⎦ ⎣ ⎦⎣ ⎦ ⎣ ⎦
(4.37)
Hình 4.21 – Ví dụ biến dạng phẳng
y
x
z
x
z
y
x
y
z
1m
z
y
x

Bài giảng FEM
Page 133 / 134
4.4. Bài tốn đối xứng trục
Một số bài tốn phân tích ứng suất, được quan tâm trong thực tế, là bài tốn khảo sát vật thể đối xứng trục, chịu tải trọng đối xứng trục. Ví dụ tiêu biểu là ống trụ còn chịu áp lực dều bên trong hoặc bên ngồi(Hình 4.3). Biến dạng có tính chất đối xứng với trục y, các thành phần ứng suất là độc lập đối với góc θ , và tồn bộ các đạo hàm theoθ triệt tiêu. Các thành phần w, , , ,x y z vγ γ γ τθ θ θ θ bằng 0. quan hệ chuyển vị
biến dạng có dạng:
Hình 4.22 – Bài tốn đối xứng trục
; ; ; 2xx yy xyu u v u ve e e ex x y y xθθ
∂ ∂ ∂ ∂= = = = +
∂ ∂ ∂ ∂ (4.38)
Như vậy chỉ cần 2 thành phần chuyển vị trong tiết diện phẳng bất kỳ dọc theo trục đối xứng là xác định hồn tồn trạng thái biến dạng và kéo theo là trạng thái ứng suất. Quan hệ vật liệu có dạng:

Bài giảng FEM
Page 134 / 134
( )( )
( )( )
( )( )
1 01 0
1 01 1 21 2 20 0 0
2
xx xx
yy yy
xy xy
eeEee
θθ θθ
υ υ υσυ υ υσυ υ υσ υ υ
υσ
⎡ − ⎤⎡ ⎤ ⎡ ⎤⎢ ⎥⎢ ⎥ ⎢ ⎥−⎢ ⎥⎢ ⎥ ⎢ ⎥= ⎢ ⎥−⎢ ⎥ ⎢ ⎥+ − ⎢ ⎥⎢ ⎥ ⎢ ⎥−⎢ ⎥⎢ ⎥ ⎢ ⎥⎣ ⎦ ⎣ ⎦⎢ ⎥⎣ ⎦
(4.39)
Tài liệu tham khảo: [1] FEM Course, Department of Aerospace Engineering Sciences, University of Colorado at Boulder, http://www.colorado.edu/engineering/CAS/courses.d/IFEM.d/