aula 2 - joinville.udesc.br · •transformada z (análogo da transformada de laplace) –...
TRANSCRIPT

AULA 2 Representação de Sistemas a Dados Amostrados
A Transformada Z
Função de Transferência Discreta
Profa. Mariana Cavalca
1ºSem/2015

Breve Histórico
• Primeiros trabalhos – Década de 40 com Nyquist e
Shannon
• Transformada Z (Análogo da Transformada de Laplace) –
Ragazzini e Zadeh em 1952
Nyquist (1889-1976) Shannon (1916-2001) Ragazzini (1912-1988) Zadeh (1921)
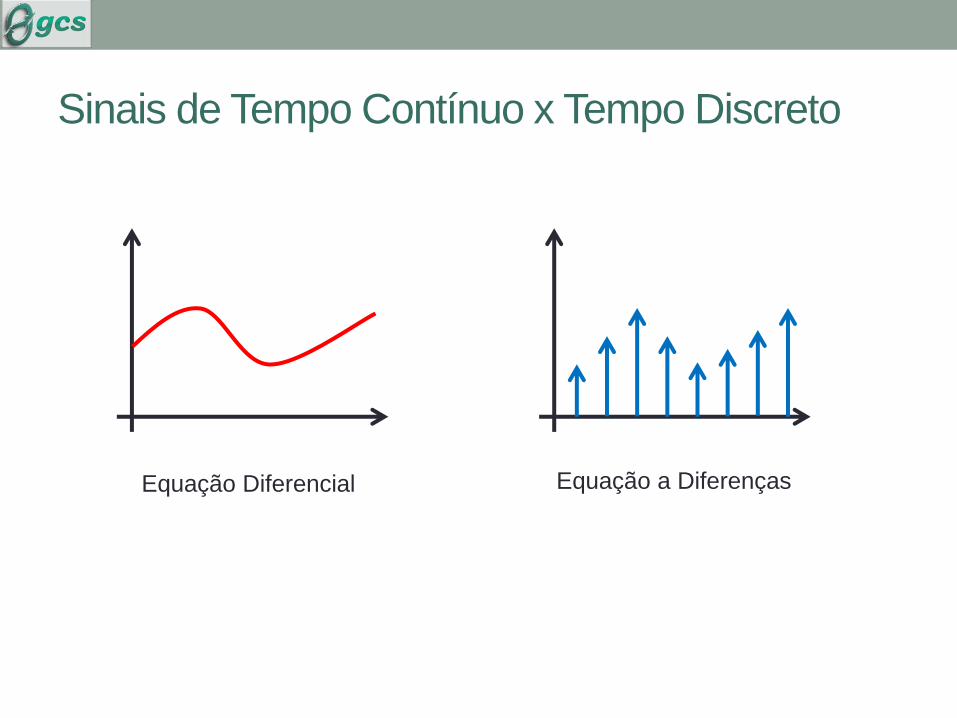
Sinais de Tempo Contínuo x Tempo Discreto
Equação Diferencial Equação a Diferenças

Equação Discreta ou Equação a Diferenças
• y(k) = Número de Bactérias
• a = taxa de reprodução
• b = taxa de mortalidade
y(k+1) = (a-b)y(k)
y(k+1) + (b-a)y(k) = 0 ->
Equação Discreta (ou a
diferenças) de Primeira Ordem
Não-Forçada

Sistemas Digitais x Sistemas a Dados Amostrados
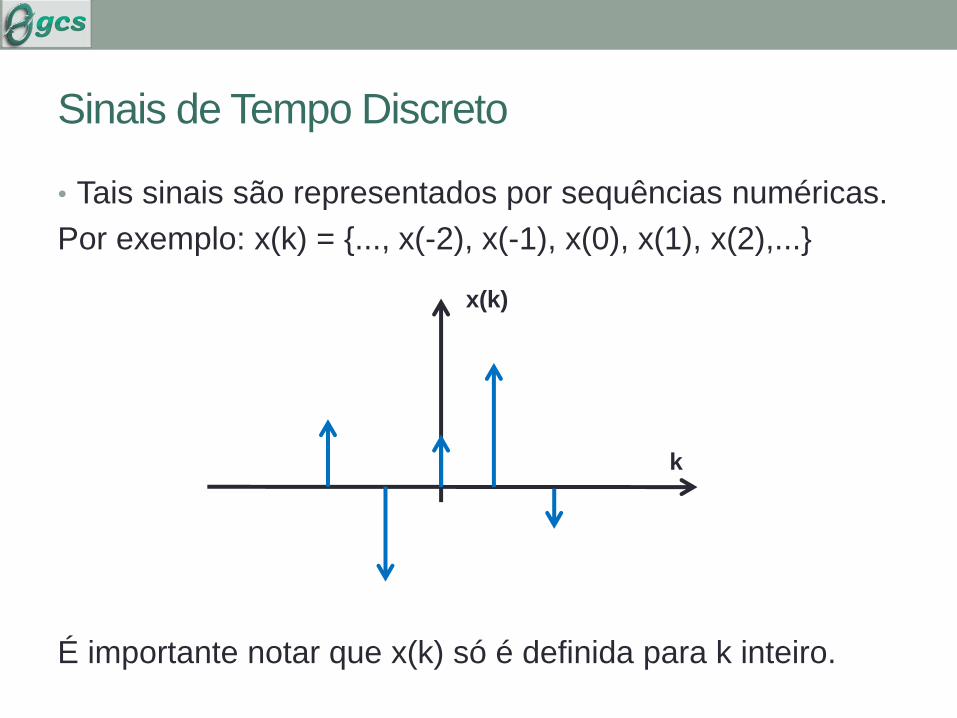
Sinais de Tempo Discreto
• Tais sinais são representados por sequências numéricas.
Por exemplo: x(k) = {..., x(-2), x(-1), x(0), x(1), x(2),...}
É importante notar que x(k) só é definida para k inteiro.
k
x(k)

Exemplos de Sequências
• Sequência Amostra Unitária ou Impulso Discreto
• δ(k) = 0, k ≠ 0
• δ(k) = 1, k = 0
k
δ(k)
1

Exemplos de Sequências
• Sequência Degrau Unitário
• u(k) = 1, k ≥ 0
• u(k) = 0, k < 0
k
u(k)
1

Exemplos de Sequências
• Temos a seguinte relação entre o impulso discreto e o
degrau discreto:
• u(k) = δ(k−i)∞i=0 , ou seja, um somatório de impulsos
deslocados,
• Ou ainda,
• δ(k) = u(k) – u(k-1), ou seja, uma subtração de sinais do
tipo degrau deslocados.

Exemplos de Sequências
• Sequência qualquer
• x = x(k)δ(k−i)∞i=0
k
x

Resposta ao Impulso de Sistemas Discretos
• Conceito similar ao caso contínuo; neste caso é uma
sequência de ponderação.
• Exemplo:
y(k) + a1y(k-1)+a2y(k-2) = b0u(k)
Considere ainda que tal sistema está inicialmente relaxado
(y(k)=0, k<0) e que u(k) seja a função Delta de Kronecker,
isto é,
k
δ(k)
1 δ(k) = 0, k ≠ 0
δ(k) = 1, k = 0

Resposta ao Impulso de Sistemas Discretos
Resulta,
• Para k=0
y(0) + a1y(-1)+a2y(-2) = b0u(0)
y(0) = b0
• Para k=1
y(1) + a1y(0)+a2y(-1) = b0u(1)
y(1)+a1y(0) = 0
y(1)=-a1b0
• E assim sucessivamente...
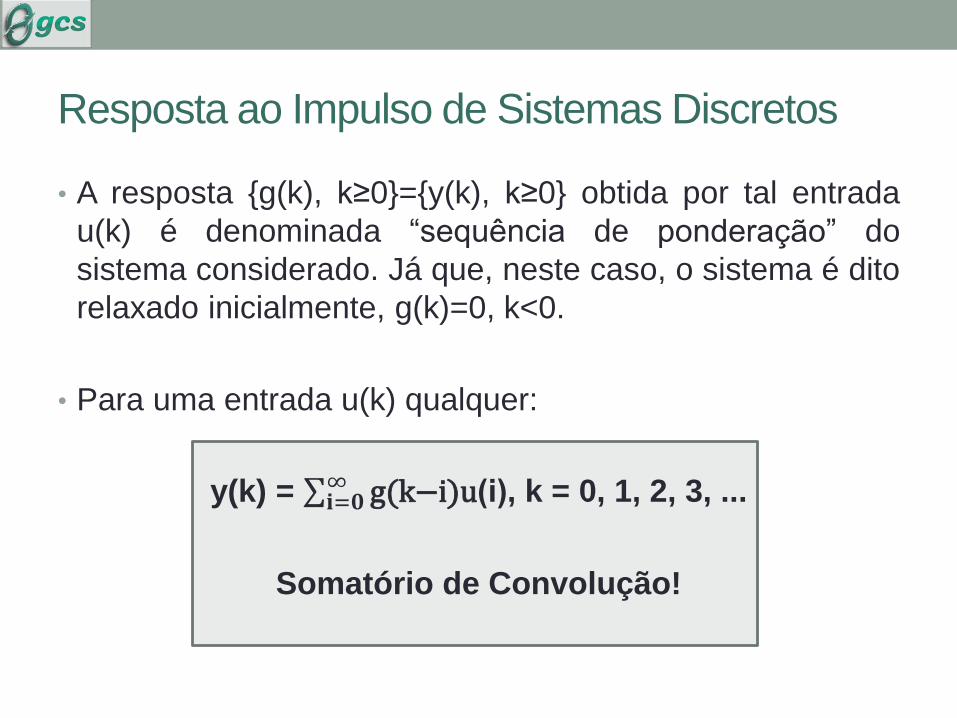
Resposta ao Impulso de Sistemas Discretos
• A resposta {g(k), k≥0}={y(k), k≥0} obtida por tal entrada
u(k) é denominada “sequência de ponderação” do
sistema considerado. Já que, neste caso, o sistema é dito
relaxado inicialmente, g(k)=0, k<0.
• Para uma entrada u(k) qualquer:
y(k) = g(k−i)u(i)∞𝐢=𝟎 , k = 0, 1, 2, 3, ...
Somatório de Convolução!
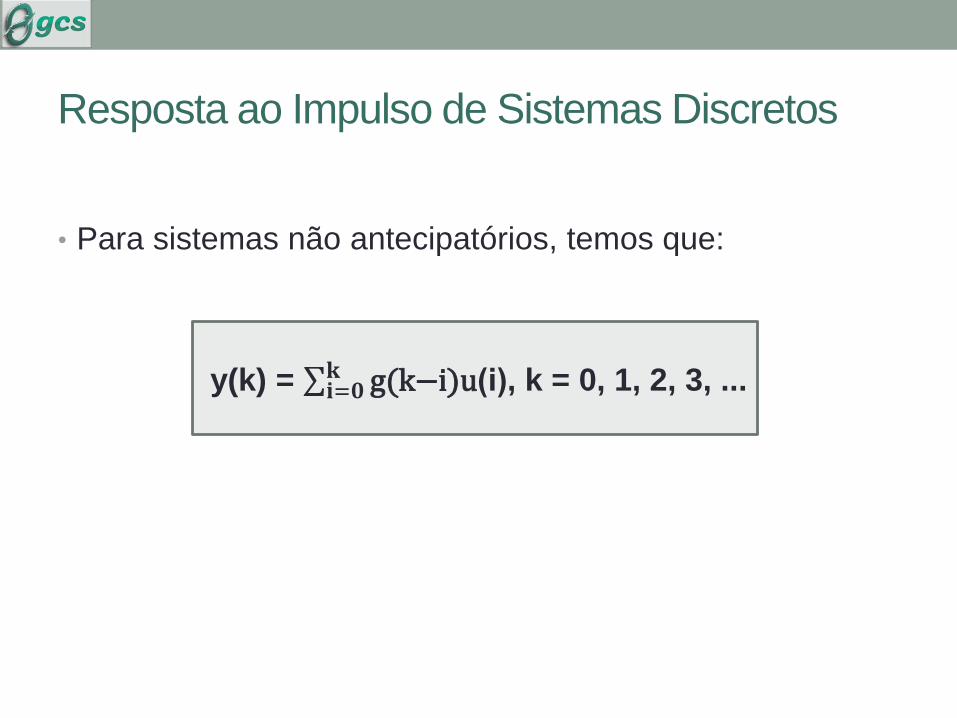
Resposta ao Impulso de Sistemas Discretos
• Para sistemas não antecipatórios, temos que:
y(k) = g(k−i)u(i)𝐤𝐢=𝟎 , k = 0, 1, 2, 3, ...

Sistemas Discretos Lineares Invariantes no Tempo
• Podemos definir que um dado processo, nada mais é
matematicamente do que uma transformação, ou um
operador, que mapeia uma sequência de entradas em
uma sequência de saídas:
• y(k) = T[u(k)]
u(k) y(k)
T

Sistemas Discretos Lineares Invariantes no Tempo
• Neste caso, a resposta ao impulso é dada por:
y(k) = g(k) = T[δ(k)]
• Para um sistema invariante no tempo:
y(k) = T[δ(k-n)] = g(k-n)
• Para um sistema linear:
T[a1u1(k)+a2u2(k)] = a1T[u1(k)] + a2T[u2(k)]
Sistemas Discretos Lineares Invariantes no Tempo
• Finalmente, para um dado sistema discreto linear,
invariante no tempo e inicialmente não-relaxado:
y(k) = g(i)u(k−i)∞𝑖=−∞ = g(k−i)u(k)∞
𝑖=−∞
• Para o caso realizável e inicialmente relaxado:
y(k) = g(i)u(k−i)𝑘𝑖=0 = g(k−i)u(k)𝑘
𝑖=0

Exemplo 1
• Seja a seguinte resposta ao impulso unitário: g(k) = ak. Determine a equação a diferenças (caso inicialmente relaxado).
Solução:
y(k) = g(i)u(k−i)∞𝑖=0 = aiu(k−i)∞
𝑖=0
y(k) = aiu(k−i)∞𝑖=0 = a ai−1u(k−i)∞
𝑖=0
y(k) = a ai−1u(k−i)∞𝑖=0 = a ai−1u(k−i)∞
𝑖=1 + aa0−1u(k−0) = a ai−1u(k−i)∞𝑖=1 + u(k)

Exemplo 1
y(k) = a ai−1u(k−i)∞𝑖=0 = a ai−1u(k−i)∞
𝑖=1 + aa0−1u(k−0) =
a ai−1u(k−i)∞𝑖=1 + u(k)
Para j = i - 1 temos i = j + 1
y(k) = a ai−1u(k−i)∞𝑖=1 + u(k) = a aju(k−j−1)∞
j=0 + u(k)
y(k) = a aju(k−j−1)∞j=0 + u(k)
y(k) = a y(k-1) + u(k)

Exemplo 2
• Determine a resposta ao impulso dada a equação a
diferenças obtida no Exemplo 1.
Solução: Seja u(k) = δ(k),
Para k=0
y(0) = ay(-1) + u(0)
y(0) = 1 = g(0)
Para k=1
y(1) = ay(0) + u(1)
y(1) = a = g(1)

Exemplo 2
Para k=2
y(2) = ay(1) + u(2)
y(2) = a2 = g(2)
Para k=k
y(k) = ay(k) + u(k)
y(k) = ak = g(k)
Logo, g(k) = ak
A Transformada Z
• Trabalho Pioneiro: “The Analysis of
Sampled-Data Systems” - Ragazzini e
Zadeh em 1952;
• Análogo discreto da Transformada de
Laplace;
• Transforma uma sequência de números
em uma função da variável complexa z;
• Sugestão para Leitura: Artigo de
Tonidandel publicado no CBA 2010
intitulado: “Decifrando a Transformada Z”.
Ragazzini (1912-1988)
Zadeh (1921)
Definição
• A Transformada Z de um sinal discreto y(k) representada
por Z[y(k)] = Y(z) é definida como sendo:
Z[y(k)] = y(k)z−k∞k=−∞
Obs. Caso o sinal y(.) tenha sido obtido amostrando um
sinal contínuo com período de amostragem T, temos:
Z[y(k)] = y(kT)z−k∞k=−∞
Exemplos
• Sequência Amostra Unitária
Z[δ(k)] = δ(k)z−k∞k=−∞ = 1
• Sequência Degrau Unitário
Z[u(k)] = 1z−k∞k=−∞ = 1 + z−1 + z−2 + ...
Por progressão Geométrica
U(z) = 1
1−z−1 = 𝑧
𝑧−1

Propriedades da Transformada Z
Considere y(k) gerado por um sistema invariante no tempo
e relaxado (y(k) = 0 para k<0),
a) Linearidade
Z[ay(k) + bw(k)] = (ay(k)+bw(k))z−k∞k=0 = ay(k)z−k∞
k=0
+ bw(k)z−k∞k=0 = a y(k)z−k∞
k=0 + b w(k)z−k∞k=0 =
aZ[y(k)] + bZ[w(k)]

Propriedades da Transformada Z
b) Translação
Z[y(k+m)] = z−mZ[y(k)]
Tente provar! Dica: Livro do Prof. Elder!
c) Escalonamento no Plano z
Z[aky(k)] = aky(k)z−k∞k=0 = y(k)(a−1z)−k∞
k=0 = Y(a−1z)
Propriedades da Transformada Z
d) Multiplicação por k
Z[ky k ] =−zdZ[y k ]
dz
c) Divisão por k
Z[y k /k] = y(k)/kz−k∞
k=0
Tente provar! Dica: Livro do Prof. Elder!

Teorema dos Limites Temporais
• Teorema do Valor Inicial
Se a função y(k) possuir Y(z) como transformada e o limite
limz→∞Y(z) existir então y(0) = lim
z→∞Y(z) .
Prova:
Y(z) = y(k)z−k∞k=0 = y(0) + y(1) z−1 + ...
Logo, limz→∞Y(z) = lim
z→∞(y(0) + y(1) z−1 + ... ) = y(0)

Teorema dos Limites Temporais
• Teorema do Valor Final
Se a transformada z de y(k) for tal que (1- z−1)Y(z) seja
analítica em z ≥ 1, isto é, todos os polos de (1- z−1)Y(z)
estejam dentro do círculo unitário, com possível exceção
de um único polo em z=1, então:
y(∞) = limk→∞y(k) = lim
z→1((1− z−1)Y(z)).
Tente provar! Dica: Livro do Prof. Elder!

Função de Transferência Discreta
• Para sistemas discretos lineares invariantes no tempo
com entrada unilateral à direita, ou seja,
u(k) = 0 para k<0
• Temos:
y(k) = u(n)h(k − n) ∞n=0
onde h(.) é a resposta ao impulso de um dado processo.

Função de Transferência Discreta
• Logo,
Y(z) = y(k)z−k∞k=0 = u(n)h(k − n) ∞
n=0 z−k∞k=0
• Para sistemas causais, pode-se escrever:
Y(z) = h(k − n)z−(k−n) u(n) ∞n=0 z−n∞
k=n
Y(z) = h(j)z−j u(n) ∞n=0 z−n∞
j=0

Função de Transferência Discreta
Y(z) = h(j)z−j u(n) ∞n=0 z−n∞
j=0
Portanto: Y(z) = H z U(z) (convolução)
• H(z), a transformada z da resposta ao impulso é
chamada de função de transferência discreta.
H(z) U(z) Y(z)

Operador Atraso
• Por definição, a função de transferência (contínua e
discreta) considera que as condições iniciais são nulas.
• Em tal situação, é possível se definir o operador atraso,
tal que:
Z[x(k)] = z−nZ[x(k+n)]
• Tal operador será muito útil futuramente.

Resolução de Equações a Diferenças
• Podem ser resolvidas por meio de recursões. Exemplo:
com e
...
Questão: para calcular para k=1000, temos que calcular
todos os x(k) anteriores...
x(k 2) 3x(k 1) 2x(k ) 0 x(0 ) 0 x(1) 1
k 0 x(2) 3x(1) 2x(0) 0 x(2) 3
k 1 x(3) 3x(2) 2x(1) 0 x(3) 7

Resolução de Equações a Diferenças
• A Transformada Z permite obter uma solução não-
recursiva:
[ x(k 2) 3x(k 1) 2x(k ) 0 ]
2 2z X(z) z x(0 ) zx(1) 3zX(z) 3zx(0 ) 2X(z) 0
2 2(z 3z 2) X(z) z x(0 ) zx(1) 3zx(0 )
2(z 3z 2)X(z) z
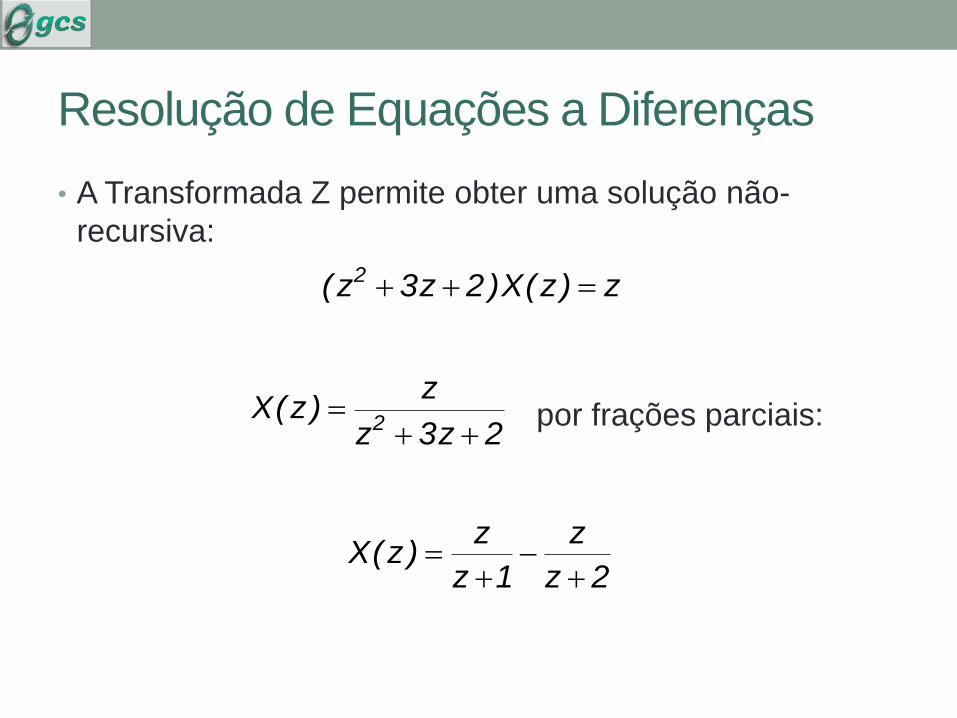
Resolução de Equações a Diferenças
• A Transformada Z permite obter uma solução não-
recursiva:
por frações parciais:
2(z 3z 2)X(z) z
2
zX(z)
z 3z 2
z zX(z)
z 1 z 2

Resolução de Equações a Diferenças
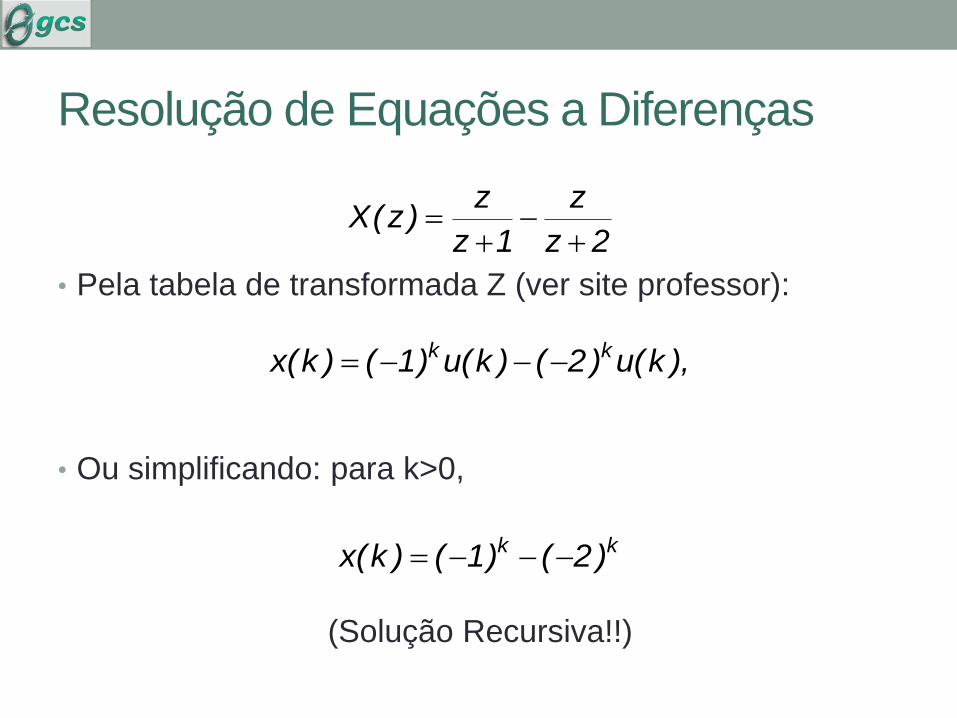
Resolução de Equações a Diferenças
• Pela tabela de transformada Z (ver site professor):
• Ou simplificando: para k>0,
(Solução Recursiva!!)
z zX(z)
z 1 z 2
k kx(k ) ( 1) u(k ) ( 2 ) u(k ),
k kx(k ) ( 1) ( 2 )
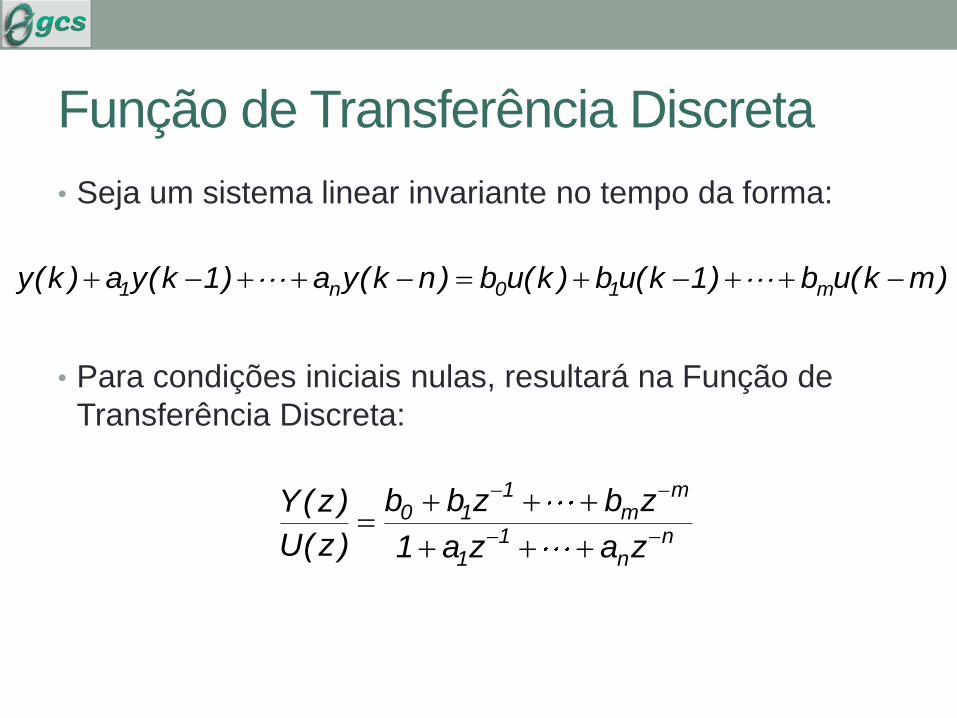
Função de Transferência Discreta
• Seja um sistema linear invariante no tempo da forma:
• Para condições iniciais nulas, resultará na Função de
Transferência Discreta:
1 n 0 1 my(k ) a y(k 1) a y(k n) b u(k ) b u(k 1) b u(k m)
1 m0 1 m
1 n1 n
b b z b zY(z)
U(z) 1 a z a z

Função de Transferência Discreta
• Tal função de transferência pode ser reescrita como:
Ou,
• Nas quais, a ordem do sistema é o grau do denominador;
• Note que o grau do numerador deve ser menor ou igual
ao grau do denominador para sistemas causais.
n m m m 10 1 m
n n 11 n
z (b z b z b )Y(z),n m
U(z) z a z a
m m 10 1 m
m n n n 11 n
b z b z bY(z),n m
U(z) z (z a z a )

A Transformada Z inversa
• Exemplo:
, para
Logo,
Y(z) 10
U(z) z 2
zU(z)
z 1
10zY(z)
(z 1)(z 2 )

A Transformada Z inversa
1) Método de recorrência temporal
1
1
10 zG(z) *
z 2 z
1
1
Y(z) 10zG(z)
X(z) 1 2z
1 1Y(z)(1 2z ) 10 z X(z)
y(k ) 2y(k 1) 10x(k 1) Para FT as
ci são
nulas!

A Transformada Z inversa
2) Método da expansão em frações parciais
Pela tabela de transformada Z:
10z 10zY(z)
z 1 z 2
ky(k ) 10( 1 2 )

A Transformada Z inversa
3) Método da expansão em séries de potência
• Definição de transformada z:
• Expandindo Y(z) em séries de potência , os valores de
y(k) serão dados pelos coeficientes de cada termo:
k 1 2
0 1 2k 0
Y(z) y(k )z y y z y z
1z
1 2 310zY(z) 10z 30z 70z
(z 1)(z 2 )

AULA 2 Bom estudo!!!!
Profa. Mariana Cavalca
1ºSem/2015