analysis of lane change crash avoidance
TRANSCRIPT
SAE TECHNICALPAPER SERIES 951895
Analysis of Lane Change Crash Avoidance
Jose L. BascunanaNational Highway Traffic Safety Administration
Reprinted from: Systems and Issues in ITS(SP-1106)
The Engineering SocietyFor Advancing Mobility
Land Sea Air and Space,
Future Transportation TechnologyConference and Exposition
Costa Mesa, CaliforniaAugust 7-10,1995
400 Commonwealth Drive, Warrendale, PA 15096-0001 U.S.A. Tel: (412) 776-4841

The appearance of the ISSN code at the bottom of this page indicates SAE’s consentthat copies of the paper may be made for personal or internal use of specific clients.This consent is given on the condition, however, that the copier pay a $7.00 perarticlecopy fee through the Copyright Clearance Center, Inc. Operations Center, 322Rosewood Drive, Danvers, MA 01923 for copying beyond that permitted by Sections107 or 108 of the U.S. Copyright Law. This consent does not extend to other kindsof copying such as copying for general distribution, for advertising or promotionalpurposes, for creating new collective works, or for resale.
SAE routinely stocks printed papers for a period of three years following date ofpublication. Direct your orders to SAE Customer Sales and SatisfactionDepartment.
Quantity reprint rates can be obtained from the Customer Sales and SatisfactionDepartment.
To request permission to reprint a technical paper or permission to use copyrightedSAE publications in other works, contact the SAE Publications Group.
All SAE papers, standards, and selectedbooks are abstracted and indexed in theGlobal Mobility Database.
No part of this publication may by reproduced in any form, in an electronic retrievalsystem or otherwise, without the prior written permission of the publisher.
ISSN 0148-7191. Copyright 1995 Society of Automotive Engineers, Inc.
Positions and opinions advanced in this paper are those of the author(s) and notnecessarily those of SAE. The author is solely responsible for the content of thepaper. A process is available by which discussions will be printed with the paper ifit is published in SAE transactions. For permission to publish this paper in full or inpart, contact the SAE Publications Group.
Persons wishing to submit papers to be considered for presentation or publicationthrough SAE should send the manuscript or a 300 word abstract of a proposedmanuscript to: Secretary, Engineering Activity Board, SAE.
Printed in USA 90-1203D/FG
951895
Analysis of Lane Change Crash Avoidance
ABSTRACT
For designing crash avoidance systemsit is necessary to know the dynamicconditions that characterize the accidents.This paper examines the dynamic conditionsthat set apart safe from unsafe lanechanges. They are determined on the basisof the relative distances and velocitiesbetween the vehicles at the time the lanechange is initiated, and upon considerationof the geometry of the lane change path.The analysis provides means to quantify thesignificance of the errors of themeasurements and estimations that thecountermeasure system must carry out toachieve its goal. The discussion includesconsideration of system's latency andreaction times of driver and vehicle, tocompare them with the time between lanechange initiation and the moment when thecrash would occur. The paper considerspossible different levels of capability forlane change countermeasure systems, and howthey could be verified by tests withoutcrash risk.
INTRODUCTION
Among the multiple matters relevantto the establishment of the so-called"Intelligent Vehicle-Highway Systems,"recently renamed "IntelligentTransportation Systems,'* the introductionof automotive crash avoidance systems isparticularly important. Consequently,there is currently a great interest inthose countermeasure systems. But todesign them properly it is necessary toknow the dynamic conditions thatcharacterize the accidents, and how theycould be changed to avoid or mitigate theiroccurrence. These dynamic conditionsdiffer for the various types of automotive
Jose L. BascunanaNational Highway Traffic Safety Administration
accidents.This paper is concerned with the
analysis of the dynamic conditions that setapart safe from unsafe automotive lanechanges, and with the discussion of relatedmatters. Using the pertinent variables,the paper first determines the conditionsthat identify safe and unsafe lane changes.The analysis continues with thedetermination of means to quantify the'importance of the different variables, aswell as the significance of the errors ofthe measurements and estimations that the
countermeasure system must carry out toachieve its function. Then, the paperdiscusses the impact of the reaction timesof the countermeasure system, driver, andvehicle. Comparing these times with-thetime between the initiation of the lanechange and the moment when the potentialcrash would occur is important to judge theeffectiveness of the countermeasure systemfor unsafe lane changes. Finally, thepaper deliberates on possible capabilitylevels of the lane change countermeasuresystems and how they could be verified bytests without collision risk.
BOUNDARIES FOR SAFE LANE CHANGE
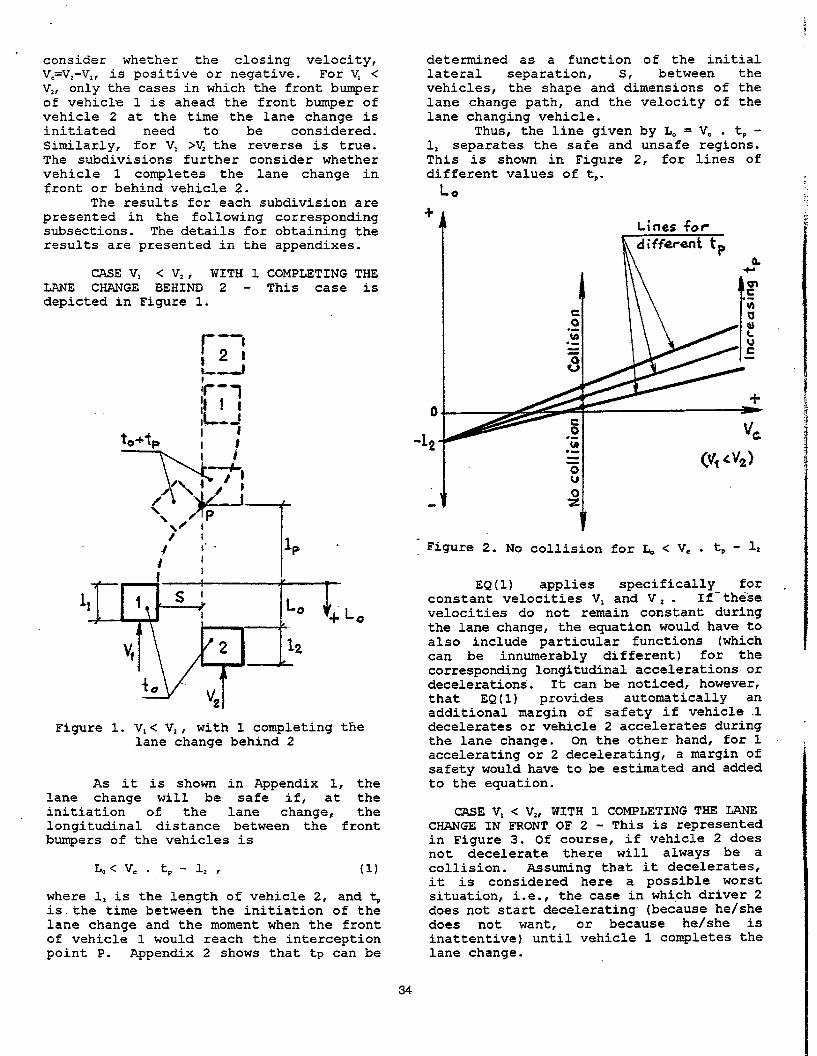
To determine the dynamic conditionsthat set apart safe from unsafe lane changes, it is convenient to subdivide theanalysis according to pertinentconsiderations and values of certainvariables. Naming 1 and 2 the two vehiclesinvolved, we designate 1 as the vehiclethat makes the lane change. The analysisis carried out for lane change to theright; the analysis for lane change-to theleft is just symmetric.
The analysis subdivisions considerwhich vehicle is faster, i.e., whether V,= v2. In other words, the subdivisions
33
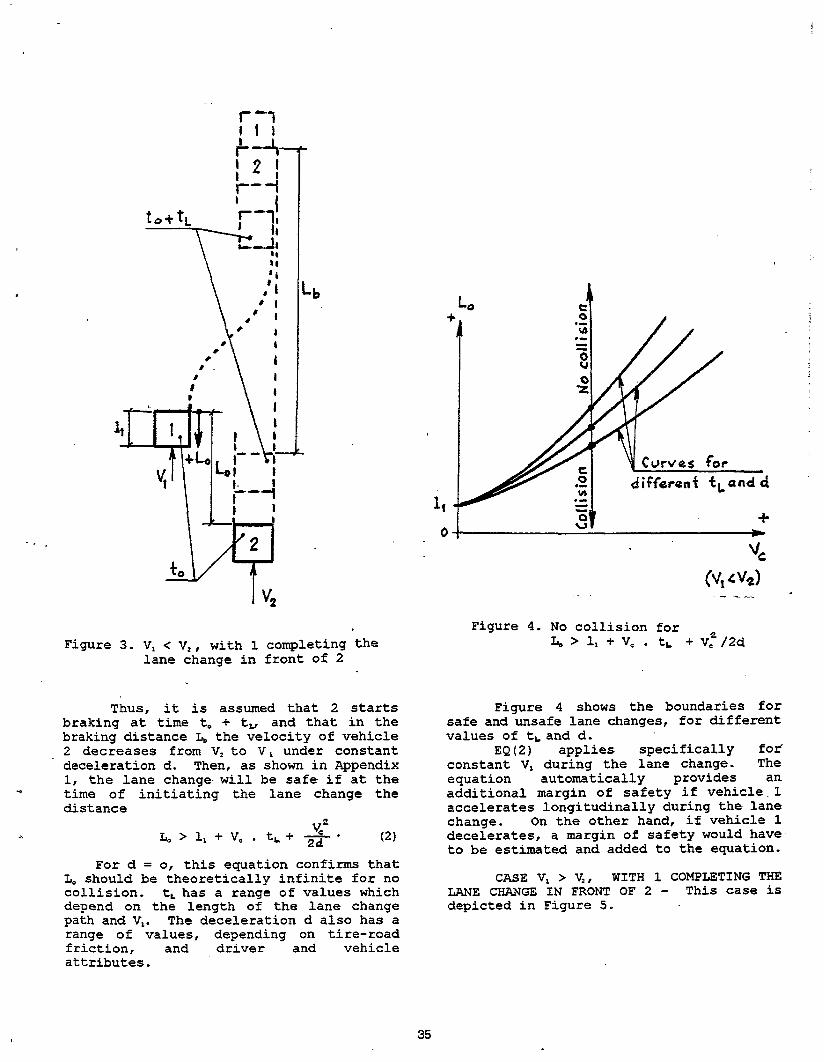

Lo should be theoretically infinite to avoidthe collision.
Figure 8 shows the boundaries forsafe and unsafe lane changes, for differentvalues of tL and d.
. . Figure 8. NO collision forLo < - 12 + vc .tL - vc
2 /2d
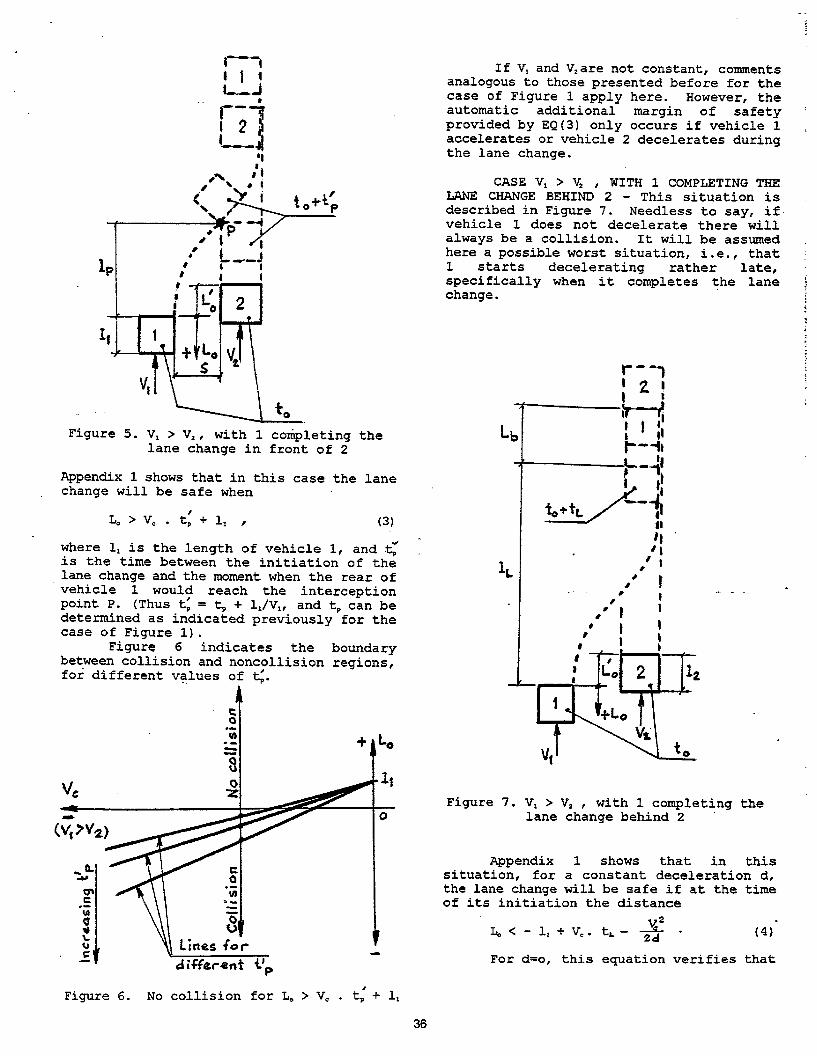
EQ(4) applies specifically forconstant V1 and V2 during the lane change.The equation automatically provides anadditional safety margin if during the lanechange vehicle 1 decelerates or vehicle 2accelerates. On the other hand, for 1accelerating or 2 decelerating during thelane change, a margin of safety would haveto be estimated and added to the equation.
COMPILATION OF SAFE AND UNSAFE REGIONS FORLANE CHANGE
The results for the various cases considered above are compiled in Figure 9.
The hatched areas cover the conditions forwhich collisions would always occur. Theother areas are safe as long as the lanechanges are conducted according to theasumptions indicated in the derivation ofthe equations that determine the safeareas.
37
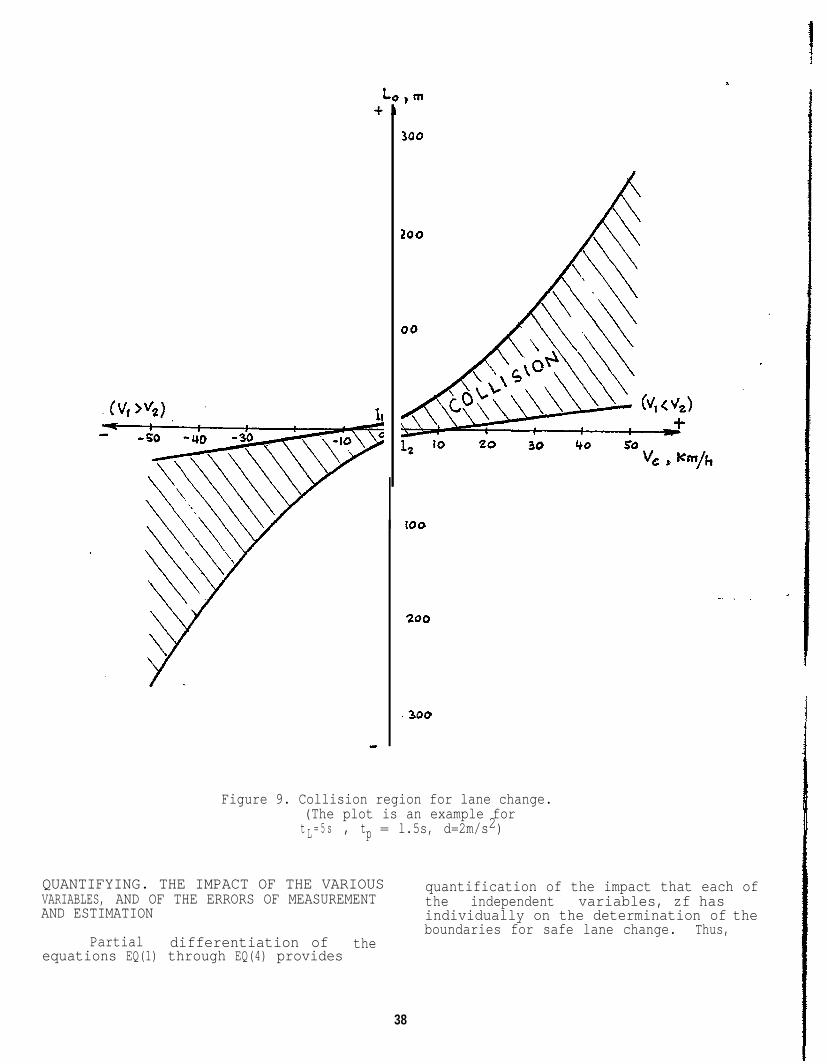
Figure 9. Collision region for lane change.(The plot is an example fort L = 5 s , tp, = l.5s, d=2m/s2)
QUANTIFYING. THE IMPACT OF THE VARIOUSVARIABLES, AND OF THE ERRORS OF MEASUREMENTAND ESTIMATION
Partial differentiation of theequations EQ(1) through EQ(4) provides
quantification of the impact that each ofthe independent variables, zf hasindividually on the determination of theboundaries for safe lane change. Thus,
38
not use the turning signals.The countermeasure systems described
under c) in the previous section wouldeliminate the risk of unsafe lane changesif their capability for automaticcorrective maneuvers works properly. Butuntil their automatic capability isconfirmed, preliminary tests without actuallane changes should be conducted, in thesame manner that it has just been indicatedfor the b) countermeasure systems.
SUMMARY
The paper describes a methodology fordetermining the dynamic conditions thatdifferentiate safe from unsafe automotivelane changes.
The differences between safe andunsafe lane changes are quantified in termsof the pertinent variables. Thesevariables include the longitudinal andlateral distances between the vehicles atthe initiation of the lane change, theirabsolute and relative velocities, and theshape and dimensions of the lane changepath.
The analysis is made for changinglanes on straight roads. It could beextended in an analogous fashion foranomalous lane changes, such as for lane
changes on curves.The analysis includes the
determination of the significance of theerrors of the measurements and estimations.that the countermeasure systems must carryout during its operation to achieve itsgoal.
A discussion is included regardingthe impact that the countermeasure system'slatency, and the reaction times of thedriver and the vehicle have on crashavoidance effectiveness.
. A discussion is also included on,possible levels -of capability of thecountermeasure systems and how thecapabilities can be verified by testswithout crash risk.
The scope of the paper is limited tothe outcome for potential individual lanechange accidents. To determine the outcomeof introducing lane change crash avoidancesystems in a population of vehicles, theanalysis should be complemented withpertinent statistical procedures which willtake into account the variabilities withinthe given population. This, of course,will require knowledge of (or estimatesof) the distributions of the variablequantities, i.e., the distributions for:absolute and relative velocities of thevehicles, longitudinal and lateraldistances between the vehicles, drivers'reaction times and other pertinent human
factors, systems' latencies, lateralaccelerations for recovery, etc.
REFERENCES
-"Department of Transportation'sIntelligent Transportation Systems (ITS)Projects," U.S. Department ofTransportation, Federal HighwayAdministration, publication No. FHWA-JPO-95-001, January 1995.
-Chovan, J.D., et al., ‘Examination of LaneChange Crashes and Potential IVHSCountermeasures," report No. DOT HS 808071,U.S. Department of Transportation, March1994.
-Wright, P-H., and Paquette, R.J., HighwayEngineering, 5th ed., John Wiley & Sons,N.Y., 1987.
(These references are for generalinformation related to the subject of thepaper; they are not referred to in the textof the paper.)
The contents of this paper expressthe views of the author on the subject, anddo not necessarily- represent the views orpositions of the National Highway TrafficSafety Administration.
41