analysis and interpretation of acoustic array data ... · background state-space model simulation...
TRANSCRIPT

Background State-space model Simulation study Future work
Analysis and interpretation of acoustic array data:estimating horizontal movement
Martin W. Pedersen, Kevin Weng26 November 2012PFRP PI meeting
University of Hawaii at Manoa

Background State-space model Simulation study Future work
Equipment for acoustic data collection
Photo credit: Vemco.

Background State-space model Simulation study Future work
Example: Palmyra rubble pile array
●
● ●
●
●
●
●
●
●
●
●
●
●
●
−162.126 −162.124 −162.122 −162.120 −162.118
5.87
25.
873
5.87
45.
875
5.87
65.
877
5.87
8
Palmyra rubble pile array
Longitude
Latit
ude
A
AA B
BB
C
CC
D
DD
EE
FF
GG
HH
II
JJ
S1
S2 S3
S4S5
S6
S7
S8S9S10
●
● ●
●
●
●
●
●
●
●
●
●
●
●
● Receivers100 m radiusRef tags

Background State-space model Simulation study Future work
Acoustic array data
Mar Apr May Jun Jul
Tag ID: 46894, # data: 32173
AA
AB
BB
CC
CD
DD
EE
FF
GG
IIJJ

Background State-space model Simulation study Future work
Sources of transmission error
I Time of day.
I Water movement (swells,currents).
I Water column stratification(thermocline etc.).
I Time since deployment(biofouling).
I Bottom topography (signalblocking).

Background State-space model Simulation study Future work
Horizontal movements
Current approaches
I Kernel estimation.
I Local polynomial regression.
Advantages: Quick way to get an overview of data.
Drawbacks: No biological interpretation, no account for errors oruncertainties in data.
Background State-space model Simulation study Future work
State-space model (SSM)
A model with two components:
I Process model (describing movement).
I Observation model (describing data collection).
Appealing model because it describes the mechanisms underlyingthe data.
Patterson et al. 2008 TREE, Schick et al. 2008 Ecol. Lett.

Background State-space model Simulation study Future work
Movement model
Simple random walk
xt = xt−1 + et , et ∼ N(0, 2Dt).
The parameter D is related to the movement rate of the fish.
●
●
●
●
●
●
Simulated RW Espinoza et al. 2011

Background State-space model Simulation study Future work
Observation model
What do we observe and how does it relate to location?
P = f (d)
0 100 200 300 400 500
0.0
0.2
0.4
0.6
0.8
1.0
Distance from receiver, meters
Det
ectio
n pr
obab
ility
0.0
0.2
0.4
0.6
0.8
−400 −200 0 200 400
−400
−200
0
200
400
Detection probability
x
y

Background State-space model Simulation study Future work
Observation model
What do we observe and how does it relate to location?
P = f (d)
0 100 200 300 400 500
0.0
0.2
0.4
0.6
0.8
1.0
Distance from receiver, meters
Det
ectio
n pr
obab
ility
0.0
0.2
0.4
0.6
0.8
−400 −200 0 200 400
−400
−200
0
200
400
Detection probability
x
y

Background State-space model Simulation study Future work
Observation model - presence information
Likelihood of location given detection.
L ∝ f (d)
0 100 200 300 400 500
0.0
0.2
0.4
0.6
0.8
1.0
Distance from receiver, meters
Like
lihoo
d of
loca
tion
0.0
0.2
0.4
0.6
0.8
−400 −200 0 200 400
−400
−200
0
200
400
Likelihood of location (detection)
x
y

Background State-space model Simulation study Future work
Observation model - absence information
Ping rate is known from manufacturer.
L ∝ 1− f (d)
0 100 200 300 400 500
0.0
0.2
0.4
0.6
0.8
1.0
Distance from receiver, meters
Like
lihoo
d of
loca
tion
DetectionNo detection
0.2
0.4
0.6
0.8
1.0
−400 −200 0 200 400
−400
−200
0
200
400
Likelihood of location (no detection)
x
y

Background State-space model Simulation study Future work
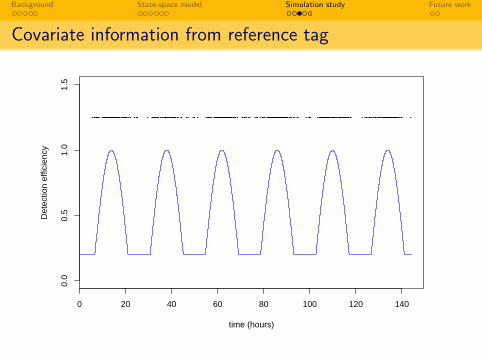
Noise conditions
Use reference tag detection efficiency, zt , as a proxy for noiseconditions.
Lt ∝ f (d , zt)

Background State-space model Simulation study Future work
Simulation study
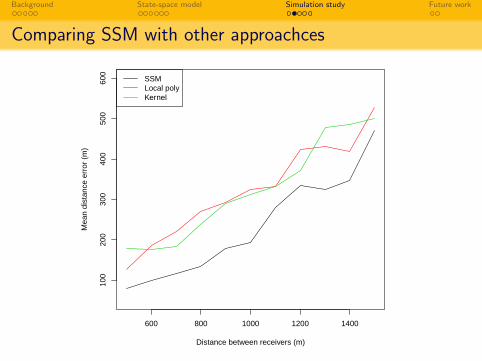
Scenario 1 - constant noise conditions
I Check consistency of parameter estimates.
I Compare state-space model performance with otherapproaches.
Scenario 2 - varying noise conditions
I Compare results with and without using reference taginformation.
Background State-space model Simulation study Future work
Comparing SSM with other approachces
600 800 1000 1200 1400
100
200
300
400
500
600
Distance between receivers (m)
Mea
n di
stan
ce e
rror
(m
)SSMLocal polyKernel
Background State-space model Simulation study Future work
Covariate information from reference tag
0 20 40 60 80 100 120 140
0.0
0.5
1.0
1.5
time (hours)
Det
ectio
n ef
ficie
ncy

Background State-space model Simulation study Future work
Movement estimation (500 m btw receivers)
True SSM no cov. SSM w cov. (dashed is 95% CI)
0 20 40 60 80 100 120 140
1000
3000
5000
time, hours
x, m
eter
s
0 20 40 60 80 100 120 140
1000
3000
5000
time, hours
y, m
eter
s
0 20 40 60 80 100 120 140
1000
3000
5000
time, hours
x, m
eter
s
0 20 40 60 80 100 120 140
1000
3000
5000
time, hours
y, m
eter
s

Background State-space model Simulation study Future work
Movement estimation (500 m btw receivers)
True SSM no cov. SSM w cov. (dashed is 95% CI)
0 20 40 60 80 100 120 140
1000
3000
5000
time, hours
y, m
eter
s
90 95 100 105
2200
2800
3400
time, hours
y, m
eter
s
0 20 40 60 80 100 120 140
1000
3000
5000
time, hours
y, m
eter
s
90 95 100 105
2200
2800
3400
time, hours
y, m
eter
s

Background State-space model Simulation study Future work
Future work
I Apply to real data.I Develop guidelines for acoustic array design.I Applications to other types of presence/absence data.

Background State-space model Simulation study Future work
Future work
I Apply to real data.I Develop guidelines for acoustic array design.I Applications to other types of presence/absence data.

Thank you for listening!