altivar 12altivar 12 - schneider-electric.com · 7 문서 구조 다음의 atv12 기술 문서는...
TRANSCRIPT
Altivar 12Altivar 12Altivar 12Altivar 12 Variable speed Variable speed Variable speed Variable speed drivedrivedrivedrives fors fors fors for
asynchronous motorsasynchronous motorsasynchronous motorsasynchronous motors
User manualUser manualUser manualUser manual 한글판한글판한글판한글판 매뉴얼매뉴얼매뉴얼매뉴얼

2
3
목차
목차목차목차목차 .................................................................................................................................................................................................................................................................................................................................................................................................................................................................................................................................... 3333
중요중요중요중요 정보정보정보정보............................................................................................................................................................................................................................................................................................................................................................................................................................................................................................................ 4444
시작시작시작시작 전전전전 설정설정설정설정 ............................................................................................................................................................................................................................................................................................................................................................................................................................................................................................ 5555
문서문서문서문서 구조구조구조구조............................................................................................................................................................................................................................................................................................................................................................................................................................................................................................................ 7777
소프트웨어소프트웨어소프트웨어소프트웨어 강화강화강화강화 ............................................................................................................................................................................................................................................................................................................................................................................................................................................................................ 8888
단계별단계별단계별단계별 설정설정설정설정 ( ( ( (빠른빠른빠른빠른 시작시작시작시작))))........................................................................................................................................................................................................................................................................................................................................................................................................................................ 9999
설정설정설정설정 –––– 예비예비예비예비 권고권고권고권고 사항사항사항사항............................................................................................................................................................................................................................................................................................................................................................................................................................................10101010
인버터인버터인버터인버터 선정선정선정선정 ............................................................................................................................................................................................................................................................................................................................................................................................................................................................................................11111111
치수치수치수치수 및및및및 무게무게무게무게 ........................................................................................................................................................................................................................................................................................................................................................................................................................................................................................12121212
설치설치설치설치 ................................................................................................................................................................................................................................................................................................................................................................................................................................................................................................................................13131313
결선결선결선결선 ................................................................................................................................................................................................................................................................................................................................................................................................................................................................................................................................16161616
전원전원전원전원 단자단자단자단자........................................................................................................................................................................................................................................................................................................................................................................................................................................................................................................20202020
제어제어제어제어 단자단자단자단자........................................................................................................................................................................................................................................................................................................................................................................................................................................................................................................23232323
점점점점검검검검 목록목록목록목록........................................................................................................................................................................................................................................................................................................................................................................................................................................................................................................29292929
공장공장공장공장 설정치설정치설정치설정치 ............................................................................................................................................................................................................................................................................................................................................................................................................................................................................................30303030
기본기본기본기본 기능기능기능기능........................................................................................................................................................................................................................................................................................................................................................................................................................................................................................................31313131
프로그래밍프로그래밍프로그래밍프로그래밍....................................................................................................................................................................................................................................................................................................................................................................................................................................................................................................32323232
파라미터파라미터파라미터파라미터 표의표의표의표의 구조구조구조구조 ........................................................................................................................................................................................................................................................................................................................................................................................................................................................35353535
호환호환호환호환 기능기능기능기능 표표표표 ........................................................................................................................................................................................................................................................................................................................................................................................................................................................................................36363636
rrrrEF EF EF EF 참조참조참조참조 모드모드모드모드....................................................................................................................................................................................................................................................................................................................................................................................................................................................................................37373737
MOn MOn MOn MOn 모니터링모니터링모니터링모니터링 모드모드모드모드 ........................................................................................................................................................................................................................................................................................................................................................................................................................................................38383838
ConF ConF ConF ConF 설정설정설정설정 모드모드모드모드 ........................................................................................................................................................................................................................................................................................................................................................................................................................................................................44444444
MyMenu MyMenu MyMenu MyMenu 설정설정설정설정 모드모드모드모드 ............................................................................................................................................................................................................................................................................................................................................................................................................................................................45454545
FULL FULL FULL FULL 설정설정설정설정 모드모드모드모드 ........................................................................................................................................................................................................................................................................................................................................................................................................................................................................47474747
유지유지유지유지 보수보수보수보수........................................................................................................................................................................................................................................................................................................................................................................................................................................................................................................99999999
ATV11 ATV11 ATV11 ATV11 –––– ATV12 ATV12 ATV12 ATV12 .................................................................................................................................................................................................................................................................................................................................................................................................................................................................... 100100100100
진단진단진단진단 및및및및 문제해결문제해결문제해결문제해결 ............................................................................................................................................................................................................................................................................................................................................................................................................................................................ 107107107107
적용적용적용적용 주의주의주의주의................................................................................................................................................................................................................................................................................................................................................................................................................................................................................................ 113113113113
적용적용적용적용 주의주의주의주의................................................................................................................................................................................................................................................................................................................................................................................................................................................................................................ 116116116116
결선결선결선결선 ........................................................................................................................................................................................................................................................................................................................................................................................................................................................................................................................ 120120120120
구성구성구성구성 표표표표 ........................................................................................................................................................................................................................................................................................................................................................................................................................................................................................................ 121121121121
파라미터파라미터파라미터파라미터 색인색인색인색인............................................................................................................................................................................................................................................................................................................................................................................................................................................................................ 122122122122

4
경고
주의주의주의주의
사용법들을 주의 깊게 읽고, 제품을 설치, 운전, 그리고 유지하기 위해 장비에 익숙해지도록 합니다. 다음에 제
시되는 특별한 메시지가, 이 설명서나 장비에 부착된 위험 가능성의 경고 또는 절차를 명확히 하거나, 단순히 하
는 주의해야 할 정보를 나타낼 수 있습니다.
이 기호는 위험 또는 안전에 대한 경고로서, 전기적인 위험이 존재하여, 사용법을 따르지 않을 경우,
인명 피해를 입을 수 있습니다.
이 기호는 안전 경고 기호입니다. 개인적인 부상 위험의 가능성을 경고하는데 사용됩니다. 이 기호가
첨부된 모든 안전 메시지를 따라야만 부상 또는 사망의 위험성을 피할 수 있습니다.
DANGERDANGERDANGERDANGER DANGER DANGER DANGER DANGER 는 긴급하게 위험한 상황으로 피할 수 없는 경우, 사망 또는 심각한 부상을 입을 수 있습니다.
WARNING WARNING WARNING WARNING WARNINGWARNINGWARNINGWARNING 는 잠재적인 위험한 상황으로 피할 수 없는 경우, 사망, 심각한 부상 또는 기계적 손실이 있을 수
있습니다.
CAUTIONCAUTIONCAUTIONCAUTION CAUTION CAUTION CAUTION CAUTION 은 잠재적인 위험한 상황으로 피할 수 없는 경우, 부상 또는 기계적 손실이 있을 수 있습니다.
CAUTIONCAUTIONCAUTIONCAUTION CAUTIONCAUTIONCAUTIONCAUTION 기호가 없을 때는, 잠재적인 위험한 상황으로 피할 수 없는 경우, 기계적 손실이 있을 수 있습니다.
주석주석주석주석
매뉴얼에서 쓰이는 ‘인버터’ 는 NECNECNECNEC에 의해 정의된 속도 조절이 가능한 제어 부분을 말합니다.
자격을 갖춘 사람에 의해서만, 전기 장비를 설치, 운전, 서비스 및 유지가 되어야 합니다. 제품 사용에서 발생
한 어떠한 결과에 대해서도 Schneider Electric 는 책임을 지지 않습니다.

5
시작 전 설정
인버터인버터인버터인버터 를를를를 실행하기실행하기실행하기실행하기 전에전에전에전에 사용법을사용법을사용법을사용법을 읽고읽고읽고읽고, , , , 이해합니다이해합니다이해합니다이해합니다....
DANGERDANGERDANGERDANGER
감전감전감전감전, , , , 폭발폭발폭발폭발, , , , 그리고그리고그리고그리고 아크아크아크아크 플래시플래시플래시플래시 의의의의 위험위험위험위험
ATV12 인버터를 설치 및 운전하기 전에 읽고, 이해합니다. 설치, 조정, 수리 및 유지는 자격을 갖춘 사람에
게 받도록 합니다.
사용자는 모든 장비의 접지와 관련한 모든 국제 및 국가의 전기적 규약 요구사항을 지켜야 할 의무가 있습니
다.
프린트된 회로 판을 포함한 인버터 의 많은 부분에 전압이 인가되어 있습니다. DO NOT TOUCH. 절연된
도구만을 사용합니다.
전압 인가 시, 차폐되지 않은 구성물 또는, 터미널의 벗겨진 나사 부분을 만지지 마세요.
PA/+ 와 PC/C 또는 DC bus 캐패시터를 가로질러 단락 시키지 마세요.
인버터 를 서비스 하기 전에:
- 외부 전원을 포함한 모든 전원을 차단
- “DO NOT TURN ON” 표식을 모든 전원 부에 부착
- 모든 전원을 오픈 상태로 잠금
- DC bus가 방전될 때까지 15분간 대기. DC 전압이 42V 이하임을 확인하도록, 13 페이지의 “Bus 전
압 측정 절차”를 수행. 인버터 의 사라진 LED 표식은 DC bus 전압의 방전 상태
전원을 인가 하거나, 인버터를 시작 정지 하기 전에, 커버를 설치하고 닫습니다.
이러한이러한이러한이러한 사용법들의사용법들의사용법들의사용법들의 이행이행이행이행 실패는실패는실패는실패는, , , , 사망사망사망사망 또는또는또는또는 심각한심각한심각한심각한 부상을부상을부상을부상을 입을입을입을입을 수수수수 있습니다있습니다있습니다있습니다....
DANGERDANGERDANGERDANGER 의도하지의도하지의도하지의도하지 않은않은않은않은 장비장비장비장비 운전운전운전운전
ATV 12 인버터를 설치 또는 운전하기 전에, 이 매뉴얼을 읽고 이해합니다.
어떠한 파라미터의 설정을 변경하더라도, 자격이 있는 사람이 이행하도록 합니다.
이러한이러한이러한이러한 사용법들의사용법들의사용법들의사용법들의 이행이행이행이행 실패는실패는실패는실패는, , , , 사망사망사망사망 또는또는또는또는 심각한심각한심각한심각한 부상을부상을부상을부상을 입을입을입을입을 수수수수 있습니다있습니다있습니다있습니다....
WARNING WARNING WARNING WARNING 손상된손상된손상된손상된 인버터인버터인버터인버터 장비장비장비장비 손상된 어떠한 인버터 또는 인버터의 부속품은 설치 및 운전을 하지 않습니다.
이러한이러한이러한이러한 사용법들의사용법들의사용법들의사용법들의 이행이행이행이행 실패는실패는실패는실패는, , , , 사망사망사망사망, , , , 심각한심각한심각한심각한 부상부상부상부상 또는또는또는또는 기계적기계적기계적기계적 손실이손실이손실이손실이 있을있을있을있을 수수수수 있습니다있습니다있습니다있습니다....
6
시작 전 설정
WARNING WARNING WARNING WARNING 제어제어제어제어 실패실패실패실패 모든 제어 방식의 설계자는
- 아주 주요한 제어 기능을 위해, 제어 경로의 잠재적 실패도 고려해야 합니다.
- 경로의 실패가 일어나거나, 일어난 후에, 안전한 상태를 취득할 방법을 제공해야 합니다.
중요한 제어 기능의 예는 비상 정지와 과도한 운전 정지입니다.
나뉘어 있거나, 중복된 제어 경로는 아주 주요한 제어 기능을 위해 제공되어야 합니다.
시스템 제어 경로는 통신 연결을 포함할 수도 있습니다. 뜻밖의 전송 지연 또는 연결 실패는 참고 대상이 됩
니다.
이러한이러한이러한이러한 사용법들의사용법들의사용법들의사용법들의 이행이행이행이행 실패는실패는실패는실패는, , , , 사망사망사망사망, , , , 심각한심각한심각한심각한 부상부상부상부상 또는또는또는또는 기계적기계적기계적기계적 손실이손실이손실이손실이 있을있을있을있을 수수수수 있습니다있습니다있습니다있습니다....
CAUTIONCAUTIONCAUTIONCAUTION 호환되지호환되지호환되지호환되지 않는않는않는않는 전압전압전압전압 인버터를 시작하고, 설정하기 전에, 전압은 인버터의 명판에 명시된 인가 전압의 범위와 모순되지 않아야 합니
다.
이러한이러한이러한이러한 사용법들의사용법들의사용법들의사용법들의 이행이행이행이행 실패는실패는실패는실패는, , , , 부상부상부상부상 또는또는또는또는 기계적기계적기계적기계적 손실이손실이손실이손실이 있을있을있을있을 수수수수 있습니다있습니다있습니다있습니다....
사용하는사용하는사용하는사용하는 모터의모터의모터의모터의 병렬병렬병렬병렬 연결연결연결연결
모터 제어 방식 C t t (P.55)를 S t d 로 설정
CAUTIONCAUTIONCAUTIONCAUTION 손상된손상된손상된손상된 모터의모터의모터의모터의 위험성위험성위험성위험성 모터 열 보호 기능은 더 이상 인버터에서 제공되지 않는다. 모든 모터에 열 보호 기능의 다른 대안을 제공한다.
이러한이러한이러한이러한 사용법들의사용법들의사용법들의사용법들의 이행이행이행이행 실패는실패는실패는실패는, , , , 기계적기계적기계적기계적 손실이손실이손실이손실이 있을있을있을있을 수수수수 있습니다있습니다있습니다있습니다....
7
문서 구조
다음의 ATV12 기술 문서는 Schneider Electric 웹사이트에서도 이용 가능합니다.
User manualUser manualUser manualUser manual
이 매뉴얼은 인버터를 어떻게 설치, 주문, 운전 및 프로그램을 하는지 설명되어 있습니다.
Simplified manualSimplified manualSimplified manualSimplified manual
이 매뉴얼은 User manual의 간편한 설명으로 되어 있습니다. 인버터와 같이 운송됩니다.
QuQuQuQuick Startick Startick Startick Start
간편 시작은 단순기계의 모터를 빠르고 간편하게 시작하기 위해서, 어떻게 결선하고 설정해야 하는지 설명되어
있습니다. 인버터와 같이 운송됩니다.
Modbus Communication manualModbus Communication manualModbus Communication manualModbus Communication manual
이 매뉴얼은 bus 또는 네트워크의 조립과 연결, 그리고 7segment LED 창의 신호, 증상과 특별한 파라미터의 통
신을 설정하는 방법이 설명되어 있습니다.
Modbus 프로토콜의 통신 방식 또한 설명되어 있습니다.
이 매뉴얼은 모든 Modbus의 주소를 포함합니다. 이는, 특별한 통신 상태의 운전 상태를 설명합니다.
ATV12P manualATV12P manualATV12P manualATV12P manual
이 매뉴얼은 ATV12P 인버터의 특징이 설명되어 있습니다.
8
소프트웨어 강화
첫 판매 이후, ATV12가 추가 기능을 갖게 되었습니다. 소프트웨어 버전 V1.1은 V1.2로 업데이트되었습니다. 이
문서는 버전 V1.2와 연관되어 있습니다.
소프트웨어 버전은 인버터 옆 부분의 정격 표시에 표기되어 있습니다.
버전버전버전버전 V1.2 V1.2 V1.2 V1.2를를를를 V1.1 V1.1 V1.1 V1.1과과과과 비교비교비교비교 강화된강화된강화된강화된 부부부부분분분분
새로운 파라미터들:
- 정지 임계값 오프셋 SLE (p.75)
- PI 피드백 감독 임계값 LPI (p.76)
- PI 피드백 감독 기능 시간 지연 tPI (p.76)
- 최대 주파수 감지 히스테리시스 APO (p.76)
- PI 피드백 감독 MPI (p.76)
- 대체 속도 LFF (p.76)
- 과부하 오류로 자동 재시작 전 시간 지연 (p.77)
- 부족부하 오류로 자동 재시작 전 시간 지연 (p.78)
- 운전 방식 선택 MdE (p.78)
- 보조 펌프의 시작 주파수 FOn (p.78)
- 보조 펌프 시작 전 시간 지연 tOn (p.78)
- 보조 펌프 정격 속도 도달 램프 rOn (p.78)
- 보조 펌프 정지 주파수 FOF (p.78)
- 보조 펌프 정지 명령 전 시간 지연 tOF (p.79)
- 보조 펌프 정지 램프 rOF (p.79)
- 영전위 흐름 점검 기간 nFd (p.79)
- 영전위 흐름 점검 활성 임계값 FFd (p.79)
- 영전위 흐름 점검 오프셋 LFd (p.79)
새로운 메뉴 펌프 예하-메뉴 PMP- (p.77). 펌프 어플리케이션 적용.
새로운 빠른 리모트/로컬 구조 전환을 설치된 버튼을 사용. (p.34)
9
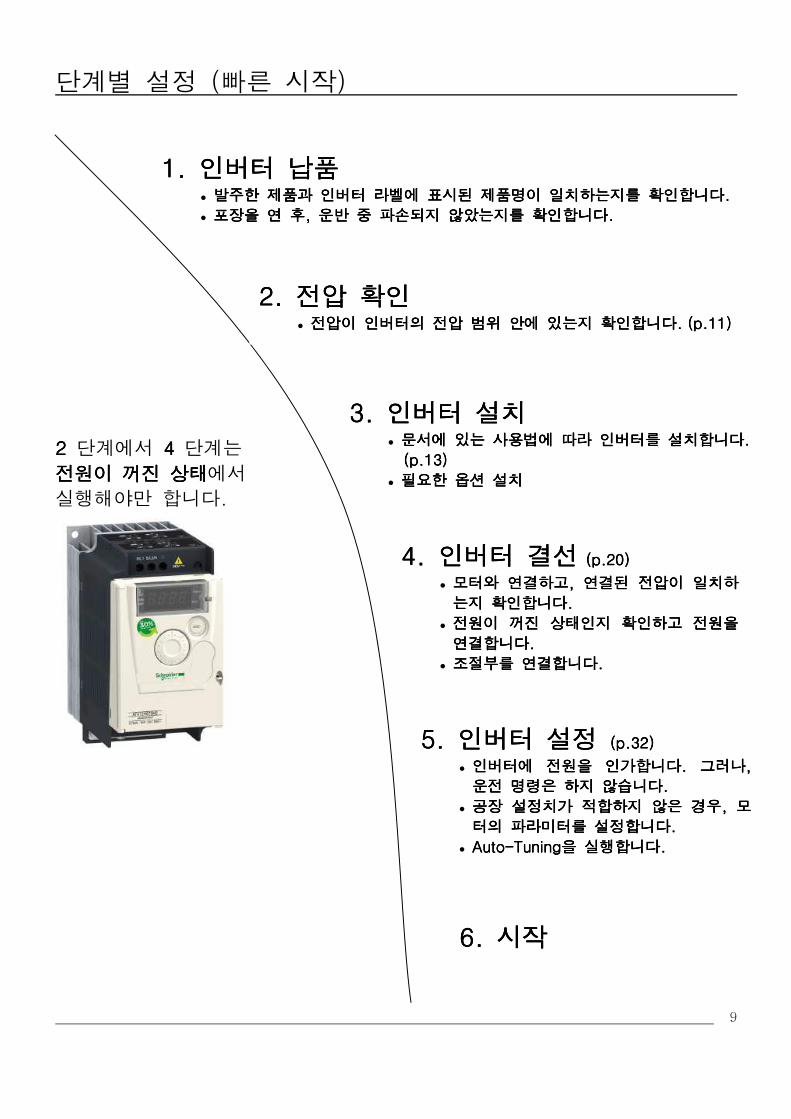
단계별 설정 (빠른 시작)
2222 단계에서 4 4 4 4 단계는
전원이전원이전원이전원이 꺼진꺼진꺼진꺼진 상태상태상태상태에서
실행해야만 합니다.
1. 1. 1. 1. 인버터인버터인버터인버터 납품납품납품납품 발주한발주한발주한발주한 제품과제품과제품과제품과 인버터인버터인버터인버터 라벨에라벨에라벨에라벨에 표시된표시된표시된표시된 제품명이제품명이제품명이제품명이 일치하는지를일치하는지를일치하는지를일치하는지를 확인합니다확인합니다확인합니다확인합니다....
포장을포장을포장을포장을 연연연연 후후후후, , , , 운반운반운반운반 중중중중 파손되지파손되지파손되지파손되지 않았는지를않았는지를않았는지를않았는지를 확인합니다확인합니다확인합니다확인합니다....
2. 2. 2. 2. 전압전압전압전압 확인확인확인확인 전압이전압이전압이전압이 인버터의인버터의인버터의인버터의 전압전압전압전압 범위범위범위범위 안에안에안에안에 있는지있는지있는지있는지 확인합니다확인합니다확인합니다확인합니다.... (p.1 (p.1 (p.1 (p.11)1)1)1)
3. 3. 3. 3. 인버터인버터인버터인버터 설치설치설치설치 문서에문서에문서에문서에 있는있는있는있는 사용법에사용법에사용법에사용법에 따라따라따라따라 인버터를인버터를인버터를인버터를 설치합니다설치합니다설치합니다설치합니다....
(p.13) (p.13) (p.13) (p.13)
필요한필요한필요한필요한 옵션옵션옵션옵션 설치설치설치설치
4. 4. 4. 4. 인버터인버터인버터인버터 결선결선결선결선 (p.20) (p.20) (p.20) (p.20)
모터와모터와모터와모터와 연결하고연결하고연결하고연결하고, , , , 연결된연결된연결된연결된 전압이전압이전압이전압이 일치하일치하일치하일치하
는지는지는지는지 확인합니다확인합니다확인합니다확인합니다....
전원이전원이전원이전원이 꺼진꺼진꺼진꺼진 상태인지상태인지상태인지상태인지 확인하고확인하고확인하고확인하고 전원을전원을전원을전원을
연결합니다연결합니다연결합니다연결합니다....
조절부를조절부를조절부를조절부를 연결합니다연결합니다연결합니다연결합니다....
5. 5. 5. 5. 인버터인버터인버터인버터 설정설정설정설정 (p.32)(p.32)(p.32)(p.32) 인버터에인버터에인버터에인버터에 전원을전원을전원을전원을 인가합니다인가합니다인가합니다인가합니다. . . . 그러나그러나그러나그러나, , , ,
운전운전운전운전 명령은명령은명령은명령은 하지하지하지하지 않습니다않습니다않습니다않습니다....
공장공장공장공장 설정치가설정치가설정치가설정치가 적합하지적합하지적합하지적합하지 않은않은않은않은 경우경우경우경우, , , , 모모모모
터의터의터의터의 파라미터를파라미터를파라미터를파라미터를 설정합니다설정합니다설정합니다설정합니다....
AutoAutoAutoAuto----TuningTuningTuningTuning을을을을 실행합니다실행합니다실행합니다실행합니다....
6. 6. 6. 6. 시작시작시작시작

10
설정 – 예비 권고 사항
인버터인버터인버터인버터 스위치를스위치를스위치를스위치를 켜기켜기켜기켜기 전전전전
DANGERDANGERDANGERDANGER 의도하지의도하지의도하지의도하지 않은않은않은않은 장비장비장비장비 운전운전운전운전
모든 논리 입력을 실수에 의한 시동을 방지하기 위해 운영 중지 상태인지 확인합니다.
이러한이러한이러한이러한 사용법들의사용법들의사용법들의사용법들의 이행이행이행이행 실패는실패는실패는실패는, , , , 사망사망사망사망 또는또는또는또는 심각한심각한심각한심각한 부상을부상을부상을부상을 입을입을입을입을 수수수수 있습니다있습니다있습니다있습니다....
인버터인버터인버터인버터 설정설정설정설정 하기하기하기하기 전전전전
DANGERDANGERDANGERDANGER
의도하지의도하지의도하지의도하지 않은않은않은않은 장비장비장비장비 운전운전운전운전
ATV12를 설치 및 운전하기 전에, 이 매뉴얼을 읽고, 이해합니다.
어떠한 파라미터의 설정을 변경하더라도, 자격이 있는 사람이 이행하도록 합니다.
파라미터를 수정시, 모든 논리 입력을 실수에 의한 시동을 방지하기 위해 운영 중지 상태인지 확인합니다.
이러한이러한이러한이러한 사용법들의사용법들의사용법들의사용법들의 이행이행이행이행 실패는실패는실패는실패는, , , , 사망사망사망사망 또는또는또는또는 심각한심각한심각한심각한 부상을부상을부상을부상을 입을입을입을입을 수수수수 있습니다있습니다있습니다있습니다....
다른다른다른다른 용량의용량의용량의용량의 모터에모터에모터에모터에 인버터인버터인버터인버터 사용하기사용하기사용하기사용하기
모터는 드라이브와는 다른 정격을 가질 수 있습니다. 소용량 모터의 경우, 구체적인 계산이 없습니다. 모터의 전
류는 모터 과부하 허용 전류 Ith 파라미터(p.94)에 설정되어야 합니다. 대용량 모터의 경우, 최대 2단계 높은 용
량(예: 2.2Kw(3HP) 인버터에 4Kw(5.5HP))의 사용이 가능한데, 이러한 경우, 모터의 정격 전류와 전력이 인버터
공식 전력을 넘지 않아야 함을 확실히 해야 합니다.
라인라인라인라인 컨택터컨택터컨택터컨택터
CAUTIONCAUTIONCAUTIONCAUTION 손상된손상된손상된손상된 모터의모터의모터의모터의 위험성위험성위험성위험성 필터 캐패시터의 수명을 위해, 빈번한 컨택터 운전을 피합니다.
운전 주기는 60초 이상을 주기로 해야만 합니다.
이러한이러한이러한이러한 사용법들의사용법들의사용법들의사용법들의 이행이행이행이행 실패는실패는실패는실패는, , , , 기계적기계적기계적기계적 손실이손실이손실이손실이 있을있을있을있을 수수수수 있습니다있습니다있습니다있습니다....
정격보다정격보다정격보다정격보다 작은작은작은작은 용량의용량의용량의용량의 모터이거나모터이거나모터이거나모터이거나, , , , 모터가모터가모터가모터가 없는없는없는없는 상태로상태로상태로상태로 사용사용사용사용 공장설정치의 모터 결상 OPL(p.94)이 동작되도록 되어 있습니다. 인버터와 같은 정격을 갖는 모터가 없이
테스트 또는 정비를 해야 하는 환경에서 인버터를 점거하기 위해서는 (특히 고출력 인버터의 경우에 유용),
모터 결상 감지 OPL(OPL = nO)을 취소해야 합니다.
모터 제어 메뉴 drc – 의 모터 제어 방식 Ctt(p.57)를 Std 로 설정합니다.
CAUTIONCAUTIONCAUTIONCAUTION 손상된손상된손상된손상된 모터의모터의모터의모터의 위험성위험성위험성위험성 모터의 정격 전류가 인버터의 정격 전류의 20%보다 작을 경우, 모터 열 보호 기능은 제공되지 않습니다. 열 보
호 기능의 대안을 제공합니다.
이러한이러한이러한이러한 사용법들의사용법들의사용법들의사용법들의 이행이행이행이행 실패는실패는실패는실패는, , , , 기계적기계적기계적기계적 손실이손실이손실이손실이 있을있을있을있을 수수수수 있습니다있습니다있습니다있습니다....

11
인버터 선정 단상단상단상단상 공급전압공급전압공급전압공급전압: 100...120 V 50/60 Hz: 100...120 V 50/60 Hz: 100...120 V 50/60 Hz: 100...120 V 50/60 Hz 3상 출력 200/240 V 모터
단상단상단상단상 공급전압공급전압공급전압공급전압: 200: 200: 200: 200...240...240...240...240 V 50/60 Hz V 50/60 Hz V 50/60 Hz V 50/60 Hz 3상 출력 200/240 V 모터
3333상상상상 공급전압공급전압공급전압공급전압: 200...240 50/60Hz: 200...240 50/60Hz: 200...240 50/60Hz: 200...240 50/60Hz 3상 출력 200/240 V 모터
(1) 이러한 전력 등급들은 지속적인 기동 중에 스위칭 주파
수를 4kHz로 합니다. 스위칭 주파수는 2에서 16kHz까지
조정 가능합니다. 4kHz 이상에서는, 인버터에 과도한 온
도 상승이 일어나면, 스위칭 주파수는 감소됩니다. 온도
상승은, 전력 모듈의 PTC 소자에 의해서 검출됩니다. 그
럼에도 불구하고, 4kHz 이상에서 지속적으로 기동 중이
면, 등급 감소를 고려해야 합니다.
10% 등급 감소 8kHz
20% 등급 감소 12kHz
30% 등급 감소 16kHz
(2) 참고참고참고참고 설명설명설명설명,,,,
예: ATV12HU15M3
ATV12: ATV12: ATV12: ATV12: Altivar 12
H: H: H: H: product on heatsink
U15: U15: U15: U15: 인버터 전력 등급, nCU(p.41)
M3: M3: M3: M3: 인버터 전압 등급, UCAL(p.41)
(3) 규격규격규격규격 설명설명설명설명

12
치수 및 무게

13
설치
설치설치설치설치 및및및및 온도온도온도온도 조건조건조건조건
수직선 상에서, ± 10° 범위 내로 인버터를 설치합니다. 열 발생 기기 가까이 두면 안됩니다.
인버터의 하단에서 상단으로 공기가 순환되어 충분한 냉각효과를 얻을 수 있도록 공간
을 확보합니다.
인버터의 전면부의 최소 이격 공간은 10mm 입니다.
보호 등급 IP20으로도, 기동에 문제가 없다면, 아래의 그림처럼 인버터 상단의 보호 커
버를 제거하도록 추천합니다.
환기환기환기환기 커버커버커버커버 제거제거제거제거
설치설치설치설치 방법방법방법방법
A A A A 방법방법방법방법
양측에 이격 공간을 ≥ 50 mm(2 in) 이상으로 환기 커버와 함께
둡니다. 방법 A는, 기동 중인 인버터의 주변 온도가 50(122
)보다 적거나 같을 때 적합합니다.
B B B B 방법방법방법방법
인버터를 나란히 설치하면, 환기 커버는 제거되어야만 합니다.
(보호 등급은 IP20가 됩니다.)
C C C C 방법방법방법방법
양측에 이격 공간을 ≥ 50 mm(2 in) 이상으로 둡니다. 기동 중
인 인버터의 주변 온도가 50(122)보다 많아지므로, 환기 커
버는 제거 되어야만 합니다. 보호 등급은 IP20가 됩니다.
이러한 설치 방법들로 인버터를 주변 온도 50(122)와 스위칭 주파수 4kHz로 사용할 수 있습니다. 팬이 없는
인버터는 등급 감소가 필요합니다.
14
설치
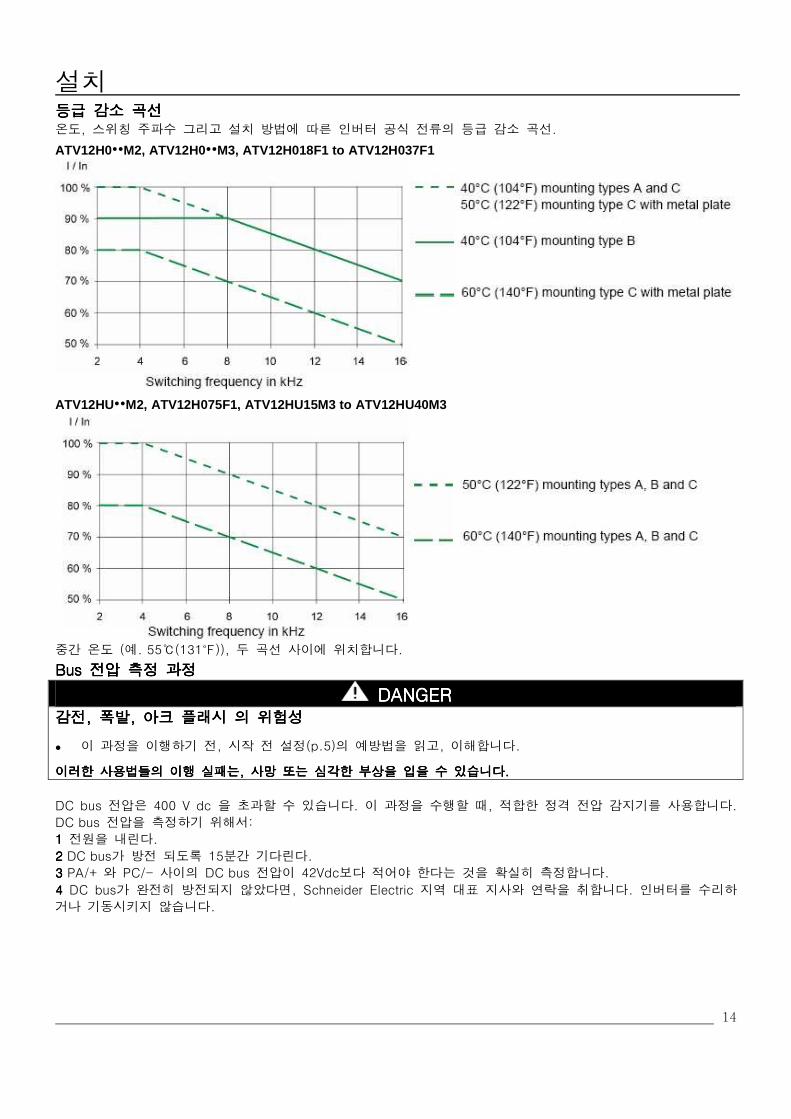
등급등급등급등급 감소감소감소감소 곡선곡선곡선곡선 온도, 스위칭 주파수 그리고 설치 방법에 따른 인버터 공식 전류의 등급 감소 곡선.
ATV12H0••M2, ATV12H0••M3, ATV12H018F1 to ATV12H037F1
ATV12HU••M2, ATV12H075F1, ATV12HU15M3 to ATV12HU40M3
중간 온도 (예. 55(131)), 두 곡선 사이에 위치합니다.
Bus Bus Bus Bus 전압전압전압전압 측정측정측정측정 과정과정과정과정
DANGERDANGERDANGERDANGER 감전감전감전감전, , , , 폭발폭발폭발폭발, , , , 아크아크아크아크 플래시플래시플래시플래시 의의의의 위험성위험성위험성위험성
이 과정을 이행하기 전, 시작 전 설정(p.5)의 예방법을 읽고, 이해합니다.
이러한이러한이러한이러한 사용법들의사용법들의사용법들의사용법들의 이행이행이행이행 실패는실패는실패는실패는, , , , 사망사망사망사망 또는또는또는또는 심각한심각한심각한심각한 부상을부상을부상을부상을 입을입을입을입을 수수수수 있습니다있습니다있습니다있습니다....
DC bus 전압은 400 V dc 을 초과할 수 있습니다. 이 과정을 수행할 때, 적합한 정격 전압 감지기를 사용합니다.
DC bus 전압을 측정하기 위해서:
1 1 1 1 전원을 내린다.
2 2 2 2 DC bus가 방전 되도록 15분간 기다린다.
3 3 3 3 PA/+ 와 PC/- 사이의 DC bus 전압이 42Vdc보다 적어야 한다는 것을 확실히 측정합니다.
4 4 4 4 DC bus가 완전히 방전되지 않았다면, Schneider Electric 지역 대표 지사와 연락을 취합니다. 인버터를 수리하
거나 기동시키지 않습니다.
15
설치
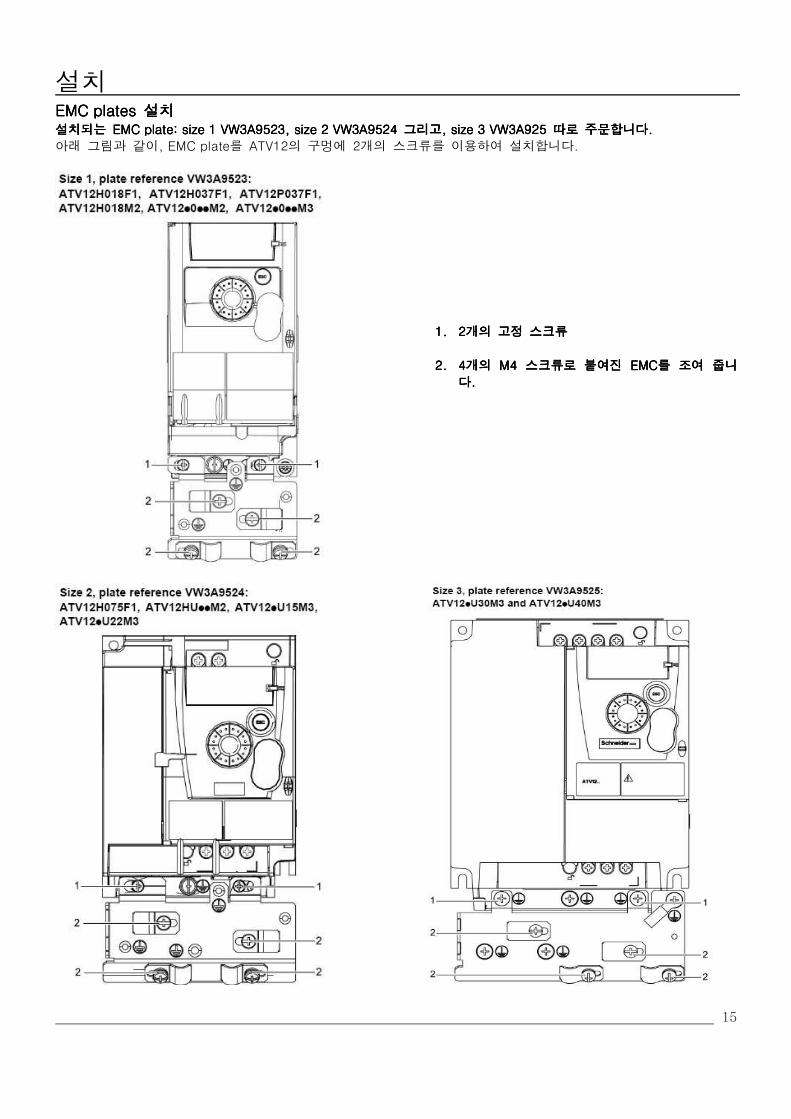
EMC plates EMC plates EMC plates EMC plates 설치설치설치설치 설치설치설치설치되는되는되는되는 EMC plate: size 1 VW3A9523, size 2 VW3A9524 EMC plate: size 1 VW3A9523, size 2 VW3A9524 EMC plate: size 1 VW3A9523, size 2 VW3A9524 EMC plate: size 1 VW3A9523, size 2 VW3A9524 그리고그리고그리고그리고, size 3 VW3A925 , size 3 VW3A925 , size 3 VW3A925 , size 3 VW3A925 따로따로따로따로 주문합니다주문합니다주문합니다주문합니다....
아래 그림과 같이, EMC plate를 ATV12의 구멍에 2개의 스크류를 이용하여 설치합니다.
1.1.1.1. 2222개의개의개의개의 고정고정고정고정 스크류스크류스크류스크류
2.2.2.2. 4444개의개의개의개의 M4 M4 M4 M4 스크류로스크류로스크류로스크류로 붙여붙여붙여붙여진진진진 EMC EMC EMC EMC를를를를 조여조여조여조여 줍니줍니줍니줍니
다다다다....

16
결선
권고사항권고사항권고사항권고사항 저 전위 레벨의 신호를 가지는 제어용 회로(센서류, PLC, 측정장비류, 비디오, 전화)와 전원용 전선은 이격 시켜
야 합니다. 가능하다면, 항상 제어부와 전원부의 전선은 90°의 각으로 교차되어야 합니다.
전원과전원과전원과전원과 회로회로회로회로 보호보호보호보호 지역 코드와 기준에 따라 전선의 크기 권장 사항을 따라야 합니다.
전원부를 결선하기 전에, 출력부 아래 측에 위치한 접지 스크류에 접지부를 접지합니다. (원형 전극을 사용한다면,
모터 전극 접속을 살펴야 합니다. P.21)
인버터는 적용될 안전 기준에 의해 접지되어야만 합니다. ATV12••••M2 인버터는 내부적으로 EMC 필터를 갖
고 있으며, 누설 전류는 3.5mA가 넘습니다.
잔류 전류에 의한 상단부 보호가 설치 기준에 의해 요구될 때, 단상 인버터에는 A형의 차단기, 3상 인버터에는 B
형의 차단기를 사용하도록 합니다. 적절한 제품을 선택:
고주파 전류 필터
시간 지연은 캐패시터의 전력이 흩어지면서 발생하는 트립 현상을 방지합니다. 시간 지연은 30mA 장치에서
는 불가능합니다. 이러한 경우, 사고로 생겨난 트립을 방지할 수 있는 SISISISI형 누설 전류 보호가 있는 RCD 장
치를 선택합니다.
다수의 인버터를 설치할 경우, 각각의 인버터에 ‘잔류 전류 장치’를 제공합니다.
제어제어제어제어 제어 및 속도 기준 회로용으로, 25-50mm(1-2 in.) 사이의 꼬인 차폐 전선을 이용하기를 권합니다. 차폐를 접지
합니다. (P.26)
모터모터모터모터 전선의전선의전선의전선의 길이길이길이길이 50m(164ft) 이상의 차폐 전선과 100m(328ft) 이상의 차폐되지 않는 전선은, 모터 초크를 사용합니다. 부속 부품
넘버로 카탈로그를 참고합니다.
장비장비장비장비 접지접지접지접지 지역과 국가 코드에 따라 인버터를 접지합니다. 최소 전선 크기인 10mm
2(6 AWG)는 누설 전류가 제한적이어야
합니다.
DANGERDANGERDANGERDANGER
감전감전감전감전, , , , 폭발폭발폭발폭발, , , , 그리고그리고그리고그리고 아크아크아크아크 플래시플래시플래시플래시 의의의의 위험위험위험위험
전원이 인가되기 전에, 인버터 판넬이 적절하게 접지되어야 합니다.
아래 그림과 같이, 주어진 접지 부분을 사용합니다.
이러한이러한이러한이러한 사용법들의사용법들의사용법들의사용법들의 이이이이행행행행 실패는실패는실패는실패는, , , , 사망사망사망사망 또는또는또는또는 심각한심각한심각한심각한 부상을부상을부상을부상을 입을입을입을입을 수수수수 있습니다있습니다있습니다있습니다....
DANGERDANGERDANGERDANGER
ATV12H075F1, ATV12H075M2 AND ATV12H075M3 – 접지접지접지접지 지속성지속성지속성지속성 위험위험위험위험 양극산화 처리된 히트싱크는 설치 표면에 절연 표면을 생성할 수 있습니다. 제안된 접지부를 쓰는지 확인합니다.
이러한이러한이러한이러한 사용법들의사용법들의사용법들의사용법들의 이행이행이행이행 실패는실패는실패는실패는, , , , 사망사망사망사망 또는또는또는또는 심각한심각한심각한심각한 부상을부상을부상을부상을 입을입을입을입을 수수수수 있습니다있습니다있습니다있습니다....
전지 저항은 1ohm 또는 그 이하임을 확인합니다.
다수의 인버터는, 좌측 그림과 같이 직접 연결을
합니다.
고리 또는 병렬로 접지선을 연결하지 않습니다.
결선 WARNING WARNING WARNING WARNING
손상된손상된손상된손상된 인버터의인버터의인버터의인버터의 위험위험위험위험 입력 전압이 출력 부(U/T1,V/T2,W/T3)에 적용되면, 인버터는 손상을 입을 것입니다.
인버터에 전원을 인가하기 전에 전원부를 점검합니다.
다른 인버터로 교환시, 인버터로 결선된 모든 전선이 매뉴얼의 결선 방법을 따르는지 검증합니다.
이러한이러한이러한이러한 사용법들의사용법들의사용법들의사용법들의 이행이행이행이행 실패는실패는실패는실패는, , , , 사망사망사망사망, , , , 심각한심각한심각한심각한 부상부상부상부상 또는또는또는또는 기계적기계적기계적기계적 손실이손실이손실이손실이 있을있을있을있을 수수수수 있습니다있습니다있습니다있습니다....
WARNING WARNING WARNING WARNING 부적절한부적절한부적절한부적절한 과전류과전류과전류과전류 보호보호보호보호 과전류 보호 장치는 적절히 설계되어야만 합니다.
캐나다의 전기 코드와 국제 전기 코드의 회로 보호 기능이 필요합니다. 이 매뉴얼(p.131)에서는 퓨즈 사용을
권고합니다.
이 매뉴얼(p.131)의 인버터 단락 전류 용량보다 단락 용량이 큰, 전원 공급부와 직접 연결하지 않습니다.
이러한이러한이러한이러한 사용법들의사용법들의사용법들의사용법들의 이행이행이행이행 실패는실패는실패는실패는, , , , 사망사망사망사망, , , , 심각한심각한심각한심각한 부상부상부상부상 또는또는또는또는 기계적기계적기계적기계적 손실이손실이손실이손실이 있을있을있을있을 수수수수 있습니다있습니다있습니다있습니다....

18
결선
일반일반일반일반 결선결선결선결선 도면도면도면도면
(1) 인버터의 상태를 원격으로 확인할 수 있는 고장표시 릴레이 접점
(2) 인버터 내부 전원+24V. 외부전원(최대 +30V)을 사용한다면, source의 0V를 COM단자에 연결하고, 인버
터의 +24V 단자는 사용하지 않습니다.
(3) 기준 분압기 SZ1RV1202 (2.2kΩ) 또는 비슷한 (최대 10 kΩ).
(4) 선택적 브레이크 모듈 VW3A7005
(5) 선택적 브레이크 저항 VW3A7••• 또는 다른 적용 가능한 저항. 카탈로그의 가능한 저항 값 확인.
NOTENOTENOTENOTE::::
인버터 근처의 모든 유도 회로를 위한 순간 전압 서지 억제기를 사용하거나, 같은 회로(릴레이, 컨택터,
솔레노이드 밸브 등)를 결합합니다.
접지부(녹색 나사)는 ATV11(결선 라벨 참조)의 위치와 비교하여 반대편에 위치합니다.
19
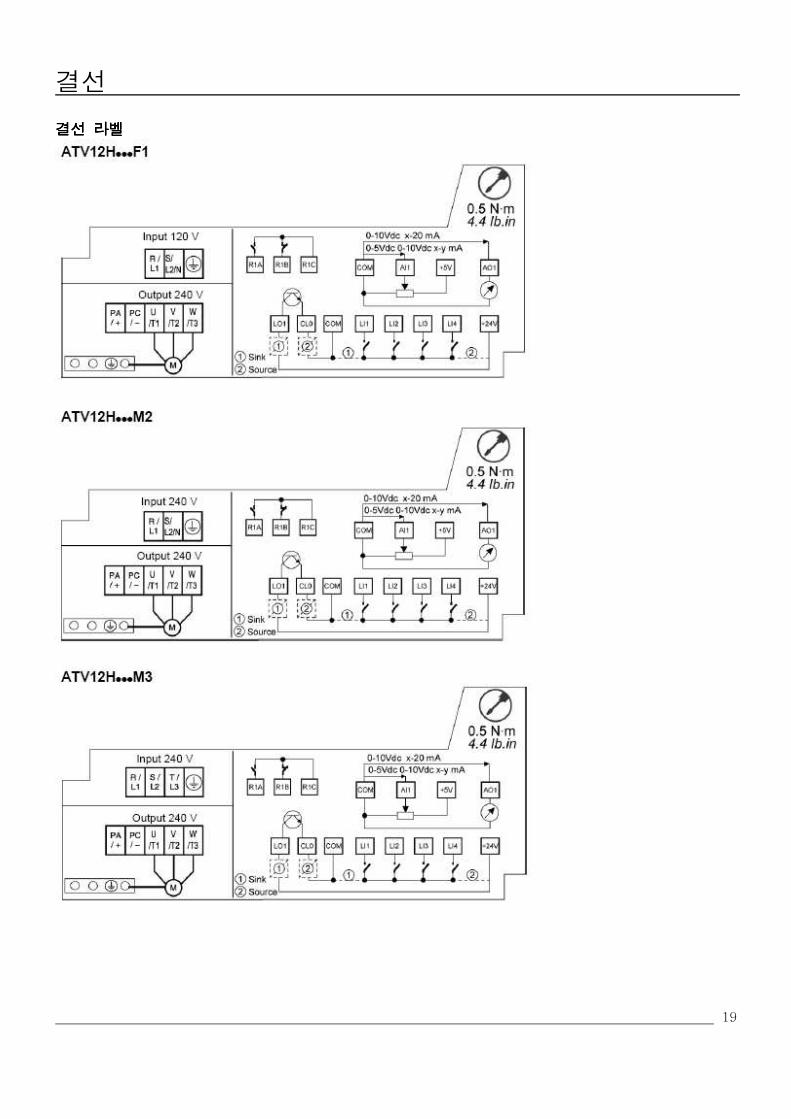
결선
결선결선결선결선 라벨라벨라벨라벨

20
전원 단자
전원은 인버터 상단으로, 모터 전원은 인버터 하단에 있습니다. 벗겨진 전선을 사용한다면, 전원 단자는 결선 트
랩을 열지 않고 연결이 가능합니다.
전원전원전원전원 단자단자단자단자 연결연결연결연결 벗겨진벗겨진벗겨진벗겨진 전선을전선을전선을전선을 사용시사용시사용시사용시, , , , 단자단자단자단자 연결연결연결연결
DANGERDANGERDANGERDANGER
감전감전감전감전, , , , 폭발폭발폭발폭발, , , , 그리고그리고그리고그리고 아크아크아크아크 플래시플래시플래시플래시 의의의의 위험위험위험위험
전원인가 전에 결선 트랩을 되돌려 놓습니다.
이러한이러한이러한이러한 사용법들의사용법들의사용법들의사용법들의 이행이행이행이행 실패는실패는실패는실패는, , , , 사망사망사망사망 또는또는또는또는 심각한심각한심각한심각한 부상을부상을부상을부상을 입을입을입을입을 수수수수 있습니다있습니다있습니다있습니다....
CAUTIONCAUTIONCAUTIONCAUTION 신체신체신체신체 손상손상손상손상 위험위험위험위험 결선 트랩 제거시 펜치를 사용합니다.
이러한이러한이러한이러한 사용법들의사용법들의사용법들의사용법들의 이행이행이행이행 실패는실패는실패는실패는, , , , 부상부상부상부상 또는또는또는또는 기계적기계적기계적기계적 손실이손실이손실이손실이 있을있을있을있을 수수수수 있습니다있습니다있습니다있습니다....
전원전원전원전원 단자와단자와단자와단자와 고리고리고리고리 단자단자단자단자 연결연결연결연결
1) ATV12••••M2 의 IT 점퍼
2) 접지 나사는 출력부의 아래에 위치

21
전원 단자
고리고리고리고리 단자단자단자단자 사용시사용시사용시사용시, , , , 모터모터모터모터 단자단자단자단자 연결연결연결연결
특징과특징과특징과특징과 전원전원전원전원 단자단자단자단자 기능기능기능기능
단자단자단자단자 기능기능기능기능 ATV12ATV12ATV12ATV12
접지접지접지접지 단자단자단자단자 모든모든모든모든 용량용량용량용량
R/L1 R/L1 R/L1 R/L1 –––– S/L2/N S/L2/N S/L2/N S/L2/N 단상단상단상단상 100...120V 100...120V 100...120V 100...120V
R/L1 R/L1 R/L1 R/L1 –––– S/L2/N S/L2/N S/L2/N S/L2/N 단상단상단상단상 200...120V 200...120V 200...120V 200...120V
R/L1 R/L1 R/L1 R/L1 –––– S/L2 S/L2 S/L2 S/L2 –––– T/L3 T/L3 T/L3 T/L3
전원전원전원전원
삼상삼상삼상삼상 200...120V 200...120V 200...120V 200...120V
PA/+PA/+PA/+PA/+ ++++출력출력출력출력(dc) (dc) (dc) (dc) 브레이킹브레이킹브레이킹브레이킹 모듈모듈모듈모듈 DC Bus ( DC Bus ( DC Bus ( DC Bus (결선결선결선결선 트랩과트랩과트랩과트랩과 분리분리분리분리)))) 모든모든모든모든 용량용량용량용량
PC/PC/PC/PC/---- ----출력출력출력출력(dc) (dc) (dc) (dc) 브레이킹브레이킹브레이킹브레이킹 모듈모듈모듈모듈 DC Bus ( DC Bus ( DC Bus ( DC Bus (결선결선결선결선 트랩과트랩과트랩과트랩과 분리분리분리분리)))) 모든모든모든모든 용용용용량량량량
POPOPOPO 사용사용사용사용 안함안함안함안함
U/T1 U/T1 U/T1 U/T1 –––– V/T2 V/T2 V/T2 V/T2 –––– W/T3 W/T3 W/T3 W/T3 모터모터모터모터 방향출력방향출력방향출력방향출력 모든모든모든모든 용량용량용량용량

22
전원 단자
전원전원전원전원 단자단자단자단자 배치배치배치배치
ATV12HATV12HATV12HATV12H 적용적용적용적용 전선전선전선전선 규격규격규격규격
mmmmmmmm2222 (AWG) (AWG) (AWG) (AWG)
제제제제안된안된안된안된 전선전선전선전선 규격규격규격규격
mmmmmmmm2222 (AWG) (AWG) (AWG) (AWG)
토크토크토크토크
NNNN∙∙∙∙m (Ib.in)m (Ib.in)m (Ib.in)m (Ib.in)
018F1018F1018F1018F1
037F1037F1037F1037F1
0000••M2M2M2M2
0000••M3M3M3M3
2 2 2 2 to 3.5
(14 14 14 14 to 12)
2
(14)
0.8 to 1
(7.1 to 8.9)
ATV12HATV12HATV12HATV12H 적용적용적용적용 전선전선전선전선 규격규격규격규격
mmmmmmmm2222 (AWG) (AWG) (AWG) (AWG)
제제제제안된안된안된안된 전선전선전선전선 규격규격규격규격
mmmmmmmm2222 (AWG) (AWG) (AWG) (AWG)
토크토크토크토크
NNNN∙∙∙∙m (Ib.in)m (Ib.in)m (Ib.in)m (Ib.in)
075F1075F1075F1075F1
UUUU••••••••M2M2M2M2
3.5 3.5 3.5 3.5 to 5.5
(12 12 12 12 to 10)
5.5
(10)
U15M3U15M3U15M3U15M3
U22M3U22M3U22M3U22M3
2 2 2 2 to 5.5
(14 14 14 14 to 10)
2(14) for U15M3
3.5(12) for U22M3
1.2 to 1.4
(10.6 to
12.4)
ATV12HATV12HATV12HATV12H 적용적용적용적용 전선전선전선전선 규격규격규격규격
mmmmmmmm2222 (AWG) (AWG) (AWG) (AWG)
제제제제안된안된안된안된 전선전선전선전선 규격규격규격규격
mmmmmmmm2222 (AWG) (AWG) (AWG) (AWG)
토크토크토크토크
NNNN∙∙∙∙m (Ib.in)m (Ib.in)m (Ib.in)m (Ib.in)
U30U30U30U30M3M3M3M3
U40U40U40U40M3M3M3M3
5.5
(10)
5.5
(10)
1.2 to 1.4
(10.6 to
12.4)
1) 볼드(두꺼운)체 값은 안전이 보장된 최소 전선 규격
2) 75(167) 구리 전선(정격 사용 최소 전선 규격)
3) 제안된 최대 값
23
제어 단자
제어 회로를 전원 케이블과 떨어지도록 합니다. 제어와 속도 참조 회로용으로, 차폐된 꼬인 케이블을 25와
50mm(1과 2인치) 규격으로 사용하도록 권고합니다. 차폐 연결하기 p.26.
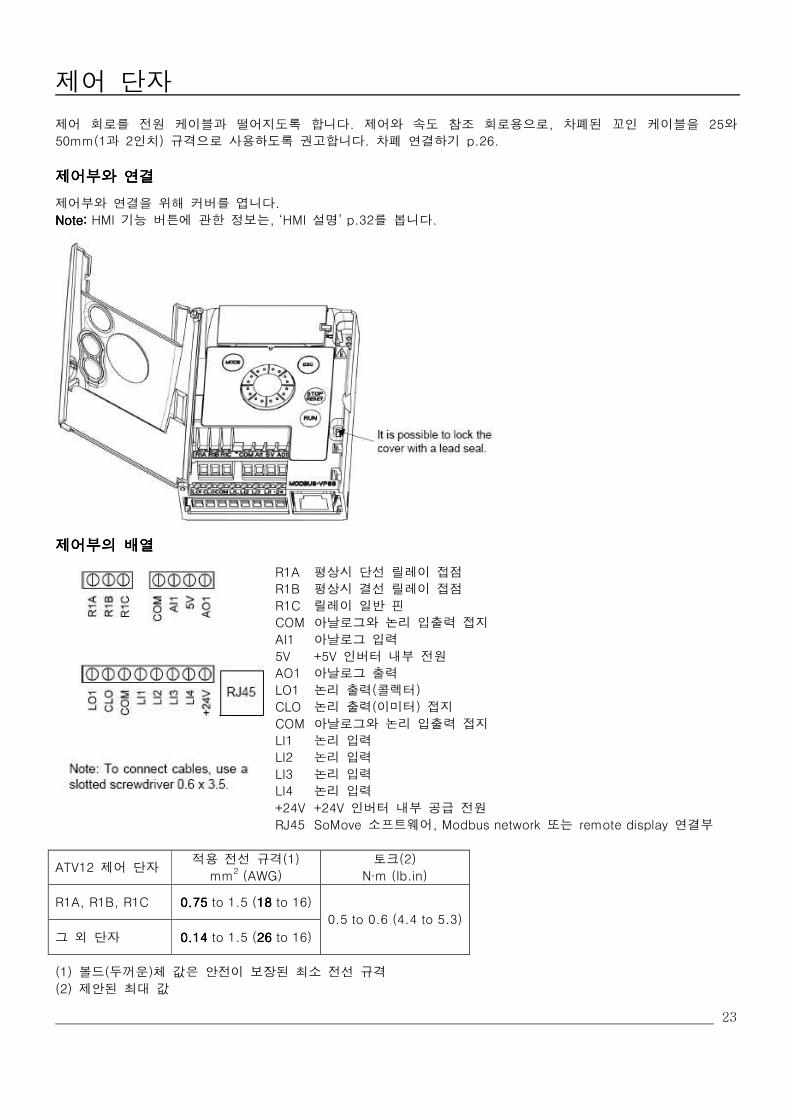
제어부와제어부와제어부와제어부와 연결연결연결연결
제어부와 연결을 위해 커버를 엽니다.
Note: Note: Note: Note: HMI 기능 버튼에 관한 정보는, ‘HMI 설명’ p.32를 봅니다.
제어부의제어부의제어부의제어부의 배열배열배열배열
R1A 평상시 단선 릴레이 접점
R1B 평상시 결선 릴레이 접점
R1C 릴레이 일반 핀
COM 아날로그와 논리 입출력 접지
AI1 아날로그 입력
5V +5V 인버터 내부 전원
AO1 아날로그 출력
LO1 논리 출력(콜렉터)
CLO 논리 출력(이미터) 접지
COM 아날로그와 논리 입출력 접지
LI1 논리 입력
LI2 논리 입력
LI3 논리 입력
LI4 논리 입력
+24V +24V 인버터 내부 공급 전원
RJ45 SoMove 소프트웨어, Modbus network 또는 remote display 연결부
ATV12 제어 단자 적용 전선 규격(1)
mm2 (AWG)
토크(2)
N∙m (Ib.in)
R1A, R1B, R1C 0.750.750.750.75 to 1.5 (18181818 to 16)
그 외 단자 0.140.140.140.14 to 1.5 (26262626 to 16)
0.5 to 0.6 (4.4 to 5.3)
(1) 볼드(두꺼운)체 값은 안전이 보장된 최소 전선 규격
(2) 제안된 최대 값
24
제어 단자
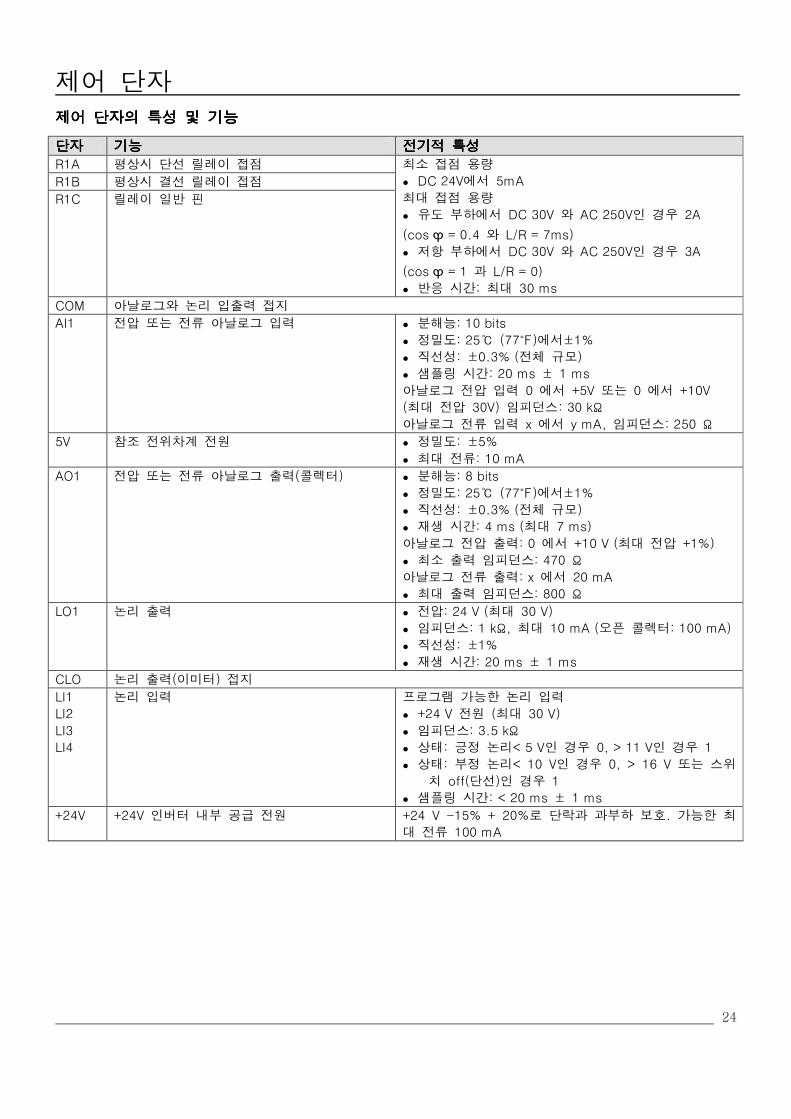
제어제어제어제어 단자의단자의단자의단자의 특성특성특성특성 및및및및 기능기능기능기능
단자단자단자단자 기능기능기능기능 전기적전기적전기적전기적 특성특성특성특성 R1A 평상시 단선 릴레이 접점
R1B 평상시 결선 릴레이 접점
R1C 릴레이 일반 핀
최소 접점 용량
DC 24V에서 5mA
최대 접점 용량
유도 부하에서 DC 30V 와 AC 250V인 경우 2A
(cos ϕ = 0.4 와 L/R = 7ms)
저항 부하에서 DC 30V 와 AC 250V인 경우 3A
(cos ϕ = 1 과 L/R = 0)
반응 시간: 최대 30 ms
COM 아날로그와 논리 입출력 접지
AI1 전압 또는 전류 아날로그 입력 분해능: 10 bits
정밀도: 25 (77)에서±1%
직선성: ±0.3% (전체 규모)
샘플링 시간: 20 ms ± 1 ms
아날로그 전압 입력 0 에서 +5V 또는 0 에서 +10V
(최대 전압 30V) 임피던스: 30 kΩ
아날로그 전류 입력 x 에서 y mA, 임피던스: 250 Ω
5V 참조 전위차계 전원 정밀도: ±5%
최대 전류: 10 mA
AO1 전압 또는 전류 아날로그 출력(콜렉터) 분해능: 8 bits
정밀도: 25 (77)에서±1%
직선성: ±0.3% (전체 규모)
재생 시간: 4 ms (최대 7 ms)
아날로그 전압 출력: 0 에서 +10 V (최대 전압 +1%)
최소 출력 임피던스: 470 Ω
아날로그 전류 출력: x 에서 20 mA
최대 출력 임피던스: 800 Ω
LO1 논리 출력 전압: 24 V (최대 30 V)
임피던스: 1 kΩ, 최대 10 mA (오픈 콜렉터: 100 mA)
직선성: ±1%
재생 시간: 20 ms ± 1 ms
CLO 논리 출력(이미터) 접지
LI1
LI2
LI3
LI4
논리 입력 프로그램 가능한 논리 입력
+24 V 전원 (최대 30 V)
임피던스: 3.5 kΩ
상태: 긍정 논리< 5 V인 경우 0, > 11 V인 경우 1
상태: 부정 논리< 10 V인 경우 0, > 16 V 또는 스위
치 off(단선)인 경우 1
샘플링 시간: < 20 ms ± 1 ms
+24V +24V 인버터 내부 공급 전원 +24 V -15% + 20%로 단락과 과부하 보호. 가능한 최
대 전류 100 mA

25
제어 단자
제어제어제어제어 연결연결연결연결 도면도면도면도면
논리 입력 형식 nPL 파라미터(P.50)는 논리입력의 작업을 프로그램 컨트롤러의 출력의 기술로 적응시키는데 사용
됩니다.
Source 동작을 위한 POS 파라미터 설정
Sink 동작을 위한 nEG 파라미터 설정
Source Source Source Source –––– 외부외부외부외부 전원전원전원전원 사용사용사용사용
Sink Sink Sink Sink –––– 외부외부외부외부 전원전원전원전원 사용사용사용사용
Source Source Source Source –––– 내부내부내부내부 전원전원전원전원 사용사용사용사용
SSSSink ink ink ink –––– 내부내부내부내부 전원전원전원전원 사용사용사용사용
DANGERDANGERDANGERDANGER 의도하지의도하지의도하지의도하지 않은않은않은않은 장비장비장비장비 운전운전운전운전 Sink 논리로 구성된 논리 입력의 잘못된 접지 활성화는 의도하지 않은 드라이브 기능 발생할 수 있습니다.
의도하지 않은 도체 접지로 인한 손상에 대비하여, 도체 신호를 보호합니다. 적절한 회로 접지 제어를 위해 NFPA 79 와 EN 60204 지침을 따릅니다. 이러한이러한이러한이러한 사용법들의사용법들의사용법들의사용법들의 이행이행이행이행 실패는실패는실패는실패는, , , , 사망사망사망사망 또는또는또는또는 심각한심각한심각한심각한 부상을부상을부상을부상을 입을입을입을입을 수수수수 있습니다있습니다있습니다있습니다....
DANGERDANGERDANGERDANGER 의도하지의도하지의도하지의도하지 않은않은않은않은 장비장비장비장비 운전운전운전운전 Sink 모드에서는 드라이브의 논리 입력으로 PLC를 사용하지 않습니다. 이러한 경우가 요구될 경우, 추가적인 정보를 위해 Schneider와 연락을 취합니다. 이러한이러한이러한이러한 사용법들의사용법들의사용법들의사용법들의 이행이행이행이행 실패는실패는실패는실패는, , , , 사망사망사망사망 또는또는또는또는 심각한심각한심각한심각한 부상을부상을부상을부상을 입을입을입을입을 수수수수 있습니다있습니다있습니다있습니다....

26
결선
전자기전자기전자기전자기 호환성호환성호환성호환성 (EMC) (EMC) (EMC) (EMC) 중요중요중요중요: : : : 인버터, 모터 그리고 케이블 차폐 사이의 고주파 등위 접지 연결은 제거하지 않고, 접지(PE) 전도체(녹색-
노랑)를 각각의 장치에 적당한 접점에 연결하는 것이 필요합니다. 결선 권장(p.16)
이이이이론과론과론과론과 예방예방예방예방
인버터, 모터 그리고 케이블 차폐 사이의 고주파 등위 접지 연결은 해야만 합니다.
차폐 케이블을 모터에 사용할 때, 4-전도체 케이블을 사용하여, 1 결선이 모터와 인버터 사이에 접지 연
결합니다. 접지 전도체의 용량은 지역 또는 국제 규격에 적합한 것으로 선택해야만 합니다. 차폐는 접지
양단 끝에도 될 수 있습니다. 금속 배관 또는 도관은 차폐 길이의 전체 또는 부분적으로 사용하고, 연속
성에는 브레이크가 없습니다.
차폐 케이블을 다이나믹 브레이크(DB) 저항에 사용할 때, 3-전도체 케이블을 사용하여, 1 결선이 DB 저
항 조립과 인버터 사이에 접지 연결을 합니다. 전비 전도체의 용량은 지역 또는 국제 규격에 적합한 것
으로 선택해야만 합니다. 차폐는 접지 양단 끝에도 될 수 있습니다. 금속 배관 또는 도관은 차폐 길이의
전체 또는 부분적으로 사용하고, 연속성에는 브레이크가 없습니다.
차폐 케이블을 제어 신호에 사용할 때, 케이블이 가까이 연결된 장비를 연결하고 접지가 같이 접촉하면,
차폐는 접지 양단 끝에도 될 수 있습니다. 케이블이 가까이 연결된 장비가 다른 접지를 갖게 되면, 차폐
로부터 흘러 들어온 큰 전류를 방지하기 위해 한쪽 끝에만 접지 차폐를 합니다. 접지가 되지 않는 차폐
는 캐패시터(예: 10nF, 100 V 또는 높음)로 높은 주파수 소음 경로를 제공하도록 접지합니다. 전원부에서
제어부를 멀리 둡니다. 제어와 속도 회로를 위해, 차폐된 꼬인 케이블 25와 50 mm (0,98과 1.97 in.)를
사용하도록 권고합니다.
전원부 케이블(공급 전원)과 모터 케이블을 사이를 최대한으로 이격되도록 합니다.
모터 케이블은 최소한 0.5m(20 in) 길도록 해야만 합니다.
서지 조정자 또는 역률 보상용 캐패시터를 인버터 출력 측에 사용하지 않습니다.
입력 측에 필터를 추가적으로 사용하면, 인버터에 가능한 한 가깝게 설치를 하고 차폐되지 않은 케이블
로 공급 전원에 직접 연결해야 합니다. 인버터의 링크 1은 출력 측 케이블을 통합니다.
추가 EMC 플레이트 설치와 IEC 61800-3 기준에 의해, “EMC 플레이트 설치”라는 부분을 참고하고,
EMC 플레이트를 제공합니다.
DANGERDANGERDANGERDANGER
감전감전감전감전, , , , 폭발폭발폭발폭발, , , , 그리고그리고그리고그리고 아크아크아크아크 플래시플래시플래시플래시 의의의의 위험위험위험위험
케이블 차폐 접지는 금속 케이블 선과 클램프 접지 하단에 연결하는 곳을 제외하고는 노출시키지 않습니다.
전원이 살아있는 부분에 차폐의 위험성을 없애도록 합니다.
이러한이러한이러한이러한 사용법들의사용법들의사용법들의사용법들의 이행이행이행이행 실패는실패는실패는실패는, , , , 사망사망사망사망 또는또는또는또는 심각한심각한심각한심각한 부상을부상을부상을부상을 입을입을입을입을 수수수수 있습니다있습니다있습니다있습니다....

27
결선
설치설치설치설치 도표도표도표도표 ( ( ( (예제예제예제예제))))
1.1.1.1. 릴레이 상태 출력을 위한 차폐되지 않은 결선 연결
2.2.2.2. 철판이 인버터와 함께 공급되지 않는 경우, 도표에 표시하는 바와 같이 설치
3.3.3.3. PA 와 PC 접점, DC 버스 제어 모듈
4.4.4.4. 제어/신호 결선 연결을 위한 차폐 케이블.
여러 개의 전도체를 연결하는 장치에는 작은 단면(0.5mm2, 20 AWG)를 사용.
차폐는 접지 양단 끝에 해야만 합니다. 차폐는 지속적이고, 중간 접점은 EMC 차폐를 금속관에 있어야 함.
5.5.5.5. 모터 연결을 위해 접지 양단이 차폐된 케이블
차폐는 접지 양단 끝에 해야만 합니다. 차폐는 지속적이고, 중간 접점은 EMC 차폐를 금속관에 있어야 함. 모
터 케이블 PE 접지 전도체 (녹색-노랑) 는 접지 연결을 반드시 해야만 함.
6.6.6.6. 접지 전도체, 단면 10 mm2
(6 AWG) IEC 61800-5-1 기준
7.7.7.7. 전원부 (차폐되지 않은 케이블)
차폐 케이블 4와 5의 접지를 인버터에 가능한 한 가깝게 부착:
차폐 노출
차폐가 노출된 부분에 적절한 용량의 케이블을 사용하고, 케이스에 부착
차폐는 금속 플레이트에 정확한 접촉으로 충분히 단단하게 고정해야만 함.
클램프 타입: 스테인레스 금속(추가 EMC 플레이트에 첨부)

28
결선
ATV 12ATV 12ATV 12ATV 12M2 M2 M2 M2 용용용용 EMC EMC EMC EMC 상태상태상태상태
C1 EMC 종류는 차폐 케이블 길이가 5m(16.4ft)가 최고값이고, 스위칭 주파수 SFr(p.59)이 4.8 또는 12kHz.
C2 EMC 종류는 차폐 케이블 길이가 10m(32.8ft)가 최고 값이고, 스위칭 주파수 SFr이 4.8 또는 12kHz이며, 차
폐 케이블 길이가 5m(16.4ft)가 최고 값으로 스위칭 주파수 SFr의 모든 값.
ATV 12ATV 12ATV 12ATV 12M2M2M2M2의의의의 내부내부내부내부 EMC EMC EMC EMC 필터필터필터필터
모든 ATV12M2 인버터는 내장 EMC 필터가 있습니다. 이로써, 접지로의 누설 전류를 방지합니다. 누설 전
류가 설치(장치 등의 잔류 전류)에 있어서 호환성 문제를 발생한다면, 아래에 명시된 것과 같이, IT 점퍼를 열어
누설 전류를 감소시킬 수 있습니다. 이 구조의 EMC 호환은 보증되지 않습니다.
CAUTIONCAUTIONCAUTIONCAUTION
인버터인버터인버터인버터 수명수명수명수명 단축단축단축단축 ATV12M2 정격에는, 필터가 연결되지 않았다면, 인버터의 스위칭 주파수가 4Khz를 넘지 않아야 합니다. 스
위칭 주파수 SFr(p.59) 조정 참조
이러한이러한이러한이러한 사용법들의사용법들의사용법들의사용법들의 이행이행이행이행 실패는실패는실패는실패는, , , , 기계적기계적기계적기계적 손실이손실이손실이손실이 있을있을있을있을 수수수수 있습니다있습니다있습니다있습니다....

29
점검 목록
유저 매뉴얼과 카탈로그의 정보를 신중하게 읽습니다. 인버터를 운전하기 전에, 다음의 기계적이고, 전기적인 설
치에 대해 점검하시고, 그 다음 인버터를 사용하고 운전합니다.
완전한 문서는, www.schneider-electric.com을 참조.
1.1.1.1. 기계적기계적기계적기계적 설치설치설치설치
인버터 설치 방식과 주변 환경에 따라, 설치와 온도 상태 소개(p.13)를 참고. 특별하게 인버터를 세로 설치하는 경우, 설치와 온도 상태 소개(p.13)를 참고. 인버터 상용은 주변 상태가 60721-3-3 기준에 준하고, 카탈로그에 기재된 수준에 준해야 함. 어플리케이션에 따른 추가 설치는, 카탈로그 참고.
2. 2. 2. 2. 전기적전기적전기적전기적 설치설치설치설치
인버터를 접지하면, 장비 접지(p.16) 입력 전원 전압 이 인버터의 정격 전압과 공급 전원이 일반적인 결선 도표(p.18)에 표기된 것과 일치하는
지 확인 요구된 접점 결선은, 제어 접점(p.23). 전원 케이블과 제어 케이블은 EMC 호환성 규칙(p.26)에 따라 분리. ATV12M2 규격의 내장 EMC 필터. 누설 전류는 ATV12M2 의 내부 EMC 필터(p.28)에 설명된 IT
점퍼를 사용하여 줄일 수 있음. 모터 연결의 전압(스타, 델타)을 확인.
3. 3. 3. 3. 인버터인버터인버터인버터 사용과사용과사용과사용과 운전운전운전운전
인버터를 시작하고, 기준 모터 주파수 bFr(p.45)를 처음 전원 인가 시, 확인합니다. 모터의 주파수에 따른
bFr(공장 설정치 50Hz)에 정의된 주파수를 점검합니다. 첫 번째 전원인가(p.34). 다음의 전원 인가는 HMI
에 rdy를 확인할 수 있습니다. MyMenu(COnF 모드의 상위)는 대부분의 어플리케이션(p.45)에 따라 인버터를 설정할 수 있습니다.
공장/소비자 파라미터 설정 불러오기 FCS(p.46)에서 인버터의 공장 설정치로 초기화할 수 있습니다.

30
공장 설정치
인버터인버터인버터인버터 공장공장공장공장 설정치설정치설정치설정치
Altivar12의 가장 일반적인 운전 상태(모터 정격과 인버터 정격)로 공장 설정치:
표시: 인버터 준비(rdy) 모터 정지 또는 모터 주파수 참조가 운전 상태일 때 정지 시, 과전압 발생에 의하여 자동으로 감속 시간을 적용 감지된 오류가 제거된 후, 자동으로 재시작하지 않음 논리 입력:
- LI1: 정방향 (2 선식 제어) - LI2, LI3, LI4: 할당 없음
논리 출력 LO1: 할당 없음 아날로그 입력 AI1 (0에서 +5V) 속도 참조 릴레이 R1: 오류 감지시(혹은 인버터 꺼짐)에 접촉부 열림 상태 아날로그 출력 AO1: 할당 없음
코드코드코드코드 설명설명설명설명 값값값값 페이지페이지페이지페이지
bFrbFrbFrbFr 모터 기준 주파수 50Hz 45454545
UnSUnSUnSUnS 모터 정격 전압 230V 57575757
ACCACCACCACC 가속 시간 3 초 64646464
dECdECdECdEC 감속 시간 3 초 66664444
LSPLSPLSPLSP 최저 속도 0 Hz 44445555
89898989
HSPHSPHSPHSP 최고 속도 50 Hz 90909090
CttCttCttCtt 모터 제어 방식 기준 U/F 제어 55557777
UFrUFrUFrUFr IR 보상(U/F 제어) 100% 55558888
IthIthIthIth 모터 열 전류 모터 정격 전류(인버터 정격에 준함)와 대등 94949494
SdCISdCISdCISdCI 자동 DC 인가 전류 0.7 x 인버터 정격 전류, 0.5 초 66667777
SFrSFrSFrSFr 스위칭 주파수 4 kHz 55559999
상위의 값이 어플리케이션에 적합하다면, 인버터는 설정 값을 변경하지 않고 사용할 수 있습니다.
인버터인버터인버터인버터 공장치공장치공장치공장치 결선결선결선결선 도표도표도표도표
ATV12M3
(1) R1 릴레이 접촉부, 인버터 상태의 원격 표시.
(2) 내부 +24V . 외부 전원이 (+30V 최대)를 사용한다면, 전원의 0V는 COM 접점에 연결하고, 인버터의
+24V 접점은 사용하지 않음
(3) 참조 전위 차계 SZ1RV1202(2.2 kΩ) 또는 유사(10kΩ 최대).
(4) 정방향

31
기본 기능
상태상태상태상태 릴레이릴레이릴레이릴레이, , , , 잠금잠금잠금잠금 해제해제해제해제 R1 상태가 인버터 전원이 감지된 오류 없이 적용될 때, 활성화됩니다. 이는 오류가 감지되거나, 인버터 전원이
제거될 때, 비활성됩니다.
인버터 오류 감지 후 초기화:
표시 창이 완벽하게 사라질 때까지 스위치를 끄고, 스위치를 다시 켜기 “자동 재시작” 기능, FLt- 메뉴, 자동 재시작 Atr(p.91)을 YES로 설정 논리 입력으로 입력이 “인버터 초기화”, FLt-메뉴, 감지된 오류 초기화 할당 rSF(p.91)을 LH로 설정
인버터인버터인버터인버터 열열열열 감지감지감지감지 열 감지는 전원 모듈에 내장된 PTC 프로브에 의해 제공됩니다.
인버터인버터인버터인버터 환기환기환기환기 정격이 0.75 kW(1HP)이상은 팬을 포함하지 않습니다. 팬은 인버터가 환기가 요구되는 상태일 때만 동작합니다.
모터모터모터모터 열열열열 감지감지감지감지 기능기능기능기능:::: 열 감지는 I
2t로 계산됩니다.
Note: Note: Note: Note: 모터모터모터모터 열상태열상태열상태열상태 저장은저장은저장은저장은 인버터인버터인버터인버터 전원이전원이전원이전원이 모터모터모터모터 열열열열 상태상태상태상태 메모메모메모메모 MtM(p. MtM(p. MtM(p. MtM(p.94949494))))이이이이 YES YES YES YES로로로로 설정되진설정되진설정되진설정되진 않다면않다면않다면않다면, , , , 제로제로제로제로 상태로상태로상태로상태로 되되되되
돌려집니다돌려집니다돌려집니다돌려집니다....
CAUTIONCAUTIONCAUTIONCAUTION
모터모터모터모터 손상손상손상손상 위험위험위험위험 외부 과부하 보호 사용은 다음의 경우에 요구됩니다:
더 이상의 모터 열 상태 메모리가 없을 때, 전원을 제품에 재인가
다수의 모터 운전
인벝 정격 전류의 20%보다 적은 모터를 운전
모터 스위칭 사용
이러한이러한이러한이러한 사용법들의사용법들의사용법들의사용법들의 이행이행이행이행 실패는실패는실패는실패는, , , , 기계적기계적기계적기계적 손실이손실이손실이손실이 있을있을있을있을 수수수수 있습니다있습니다있습니다있습니다....
CAUTIONCAUTIONCAUTIONCAUTION
모터모터모터모터 과열과열과열과열 인버터 모터 열 보호를 직접적으로 제공하지 않습니다.
모터의 열 센서를 사용하면 모든 속도 또는 로딩 상태에서 요구될 수 있습니다.
모터 생산자와 모터의 열 용량에 대해서, 동작 속도 범위가 높을 때 상담합니다.
이러한이러한이러한이러한 사용법들의사용법들의사용법들의사용법들의 이행이행이행이행 실패는실패는실패는실패는, , , , 기계적기계적기계적기계적 손실이손실이손실이손실이 있을있을있을있을 수수수수 있습니다있습니다있습니다있습니다....
32
프로그래밍
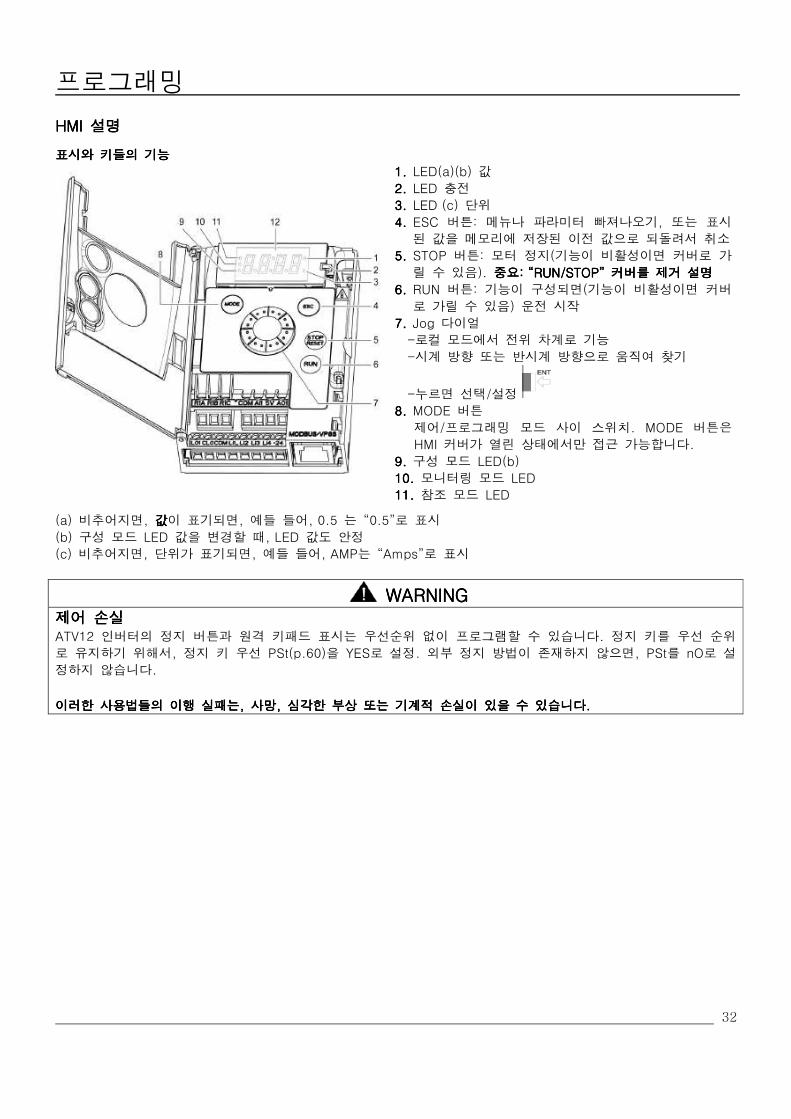
HMI HMI HMI HMI 설명설명설명설명
표시와표시와표시와표시와 키들의키들의키들의키들의 기능기능기능기능
(a) 비추어지면, 값값값값이 표기되면, 예들 들어, 0.5 는 “0.5”로 표시
(b) 구성 모드 LED 값을 변경할 때, LED 값도 안정
(c) 비추어지면, 단위가 표기되면, 예들 들어, AMP는 “Amps”로 표시
WARNING WARNING WARNING WARNING 제제제제어어어어 손실손실손실손실 ATV12 인버터의 정지 버튼과 원격 키패드 표시는 우선순위 없이 프로그램할 수 있습니다. 정지 키를 우선 순위
로 유지하기 위해서, 정지 키 우선 PSt(p.60)을 YES로 설정. 외부 정지 방법이 존재하지 않으면, PSt를 nO로 설
정하지 않습니다.
이러한이러한이러한이러한 사용법들의사용법들의사용법들의사용법들의 이행이행이행이행 실패는실패는실패는실패는, , , , 사망사망사망사망, , , , 심각한심각한심각한심각한 부상부상부상부상 또는또는또는또는 기계적기계적기계적기계적 손실이손실이손실이손실이 있을있을있을있을 수수수수 있습니다있습니다있습니다있습니다....
1.1.1.1. LED(a)(b) 값
2.2.2.2. LED 충전
3.3.3.3. LED (c) 단위
4.4.4.4. ESC 버튼: 메뉴나 파라미터 빠져나오기, 또는 표시
된 값을 메모리에 저장된 이전 값으로 되돌려서 취소
5.5.5.5. STOP 버튼: 모터 정지(기능이 비활성이면 커버로 가
릴 수 있음). 중요중요중요중요: : : : ““““RUN/STOPRUN/STOPRUN/STOPRUN/STOP”””” 커버를커버를커버를커버를 제거제거제거제거 설명설명설명설명
6.6.6.6. RUN 버튼: 기능이 구성되면(기능이 비활성이면 커버
로 가릴 수 있음) 운전 시작
7.7.7.7. Jog 다이얼
-로컬 모드에서 전위 차계로 기능
-시계 방향 또는 반시계 방향으로 움직여 찾기
-누르면 선택/설정
8.8.8.8. MODE 버튼
제어/프로그래밍 모드 사이 스위치. MODE 버튼은
HMI 커버가 열린 상태에서만 접근 가능합니다.
9.9.9.9. 구성 모드 LED(b)
10. 10. 10. 10. 모니터링 모드 LED
11. 11. 11. 11. 참조 모드 LED

33
프로그래밍
원격원격원격원격 제어제어제어제어
원격 운전 또는 HMI 프로그래밍은 추가적인 HMI VW3A1006을 사용하면 가능합니다. 크기는 70 mm(2.76 in) x
50 mm(1.97 in).
중요중요중요중요:::: 연결할 때, 원격 제어가 인버터 표시의 정확한 값을 보여주고, 내장된 키패드와 전체적으로 호환되도록 합
니다.
- 모드버스 비율 = 19.2Kbps, (보기 tbr)
- 모드버스 체재 = 8E1, 8 bit, 짝수 패리티, 1 정지 bit (보기 tFO)
34
프로그래밍
첫첫첫첫 전원전원전원전원 연결연결연결연결
첫 전원 연결에서, 기준 모터 주파수 bFr(p.45)을 설정할 것을 묻습니다. 다음번 전원 연결에서는 rdY가 보여집니
다. 운전 방식 선택은 그 다음 MODE 키를 사용해서 더욱 자세하게 할 수 있습니다.
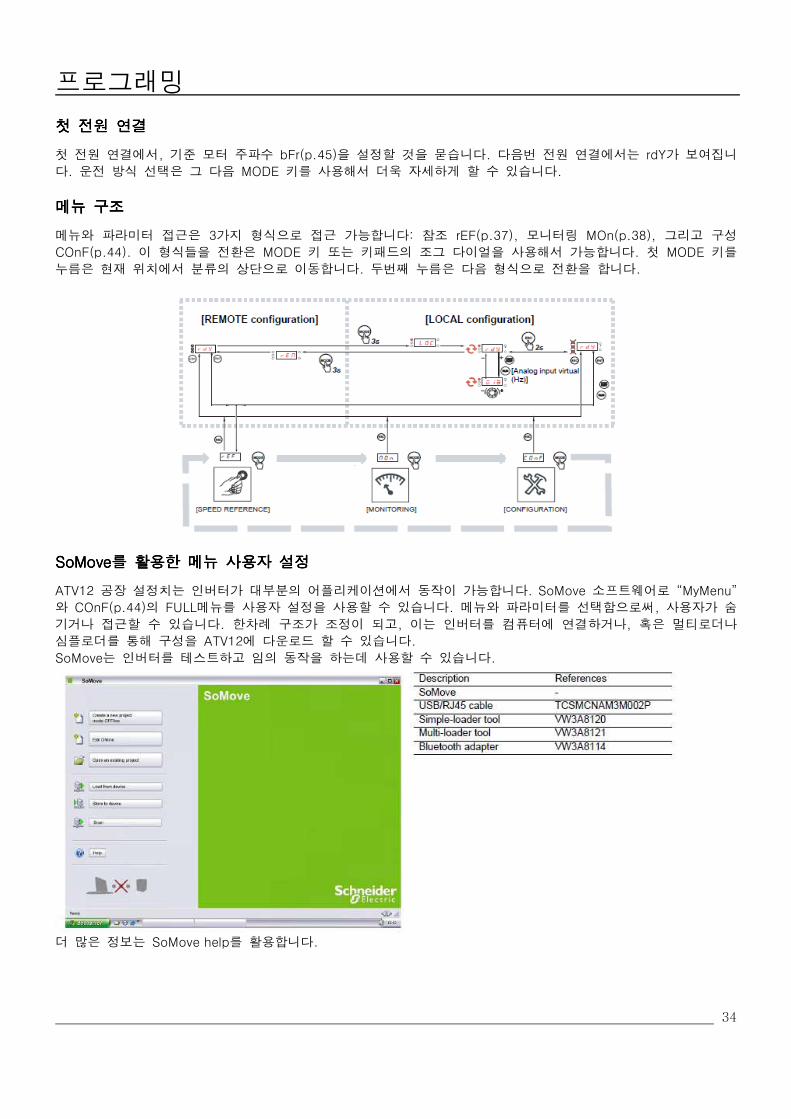
메뉴메뉴메뉴메뉴 구조구조구조구조
메뉴와 파라미터 접근은 3가지 형식으로 접근 가능합니다: 참조 rEF(p.37), 모니터링 MOn(p.38), 그리고 구성
COnF(p.44). 이 형식들을 전환은 MODE 키 또는 키패드의 조그 다이얼을 사용해서 가능합니다. 첫 MODE 키를
누름은 현재 위치에서 분류의 상단으로 이동합니다. 두번째 누름은 다음 형식으로 전환을 합니다.
SoMoveSoMoveSoMoveSoMove를를를를 활용한활용한활용한활용한 메뉴메뉴메뉴메뉴 사용자사용자사용자사용자 설정설정설정설정
ATV12 공장 설정치는 인버터가 대부분의 어플리케이션에서 동작이 가능합니다. SoMove 소프트웨어로 “MyMenu”
와 COnF(p.44)의 FULL메뉴를 사용자 설정을 사용할 수 있습니다. 메뉴와 파라미터를 선택함으로써, 사용자가 숨
기거나 접근할 수 있습니다. 한차례 구조가 조정이 되고, 이는 인버터를 컴퓨터에 연결하거나, 혹은 멀티로더나
심플로더를 통해 구성을 ATV12에 다운로드 할 수 있습니다.
SoMove는 인버터를 테스트하고 임의 동작을 하는데 사용할 수 있습니다.
더 많은 정보는 SoMove help를 활용합니다.
35
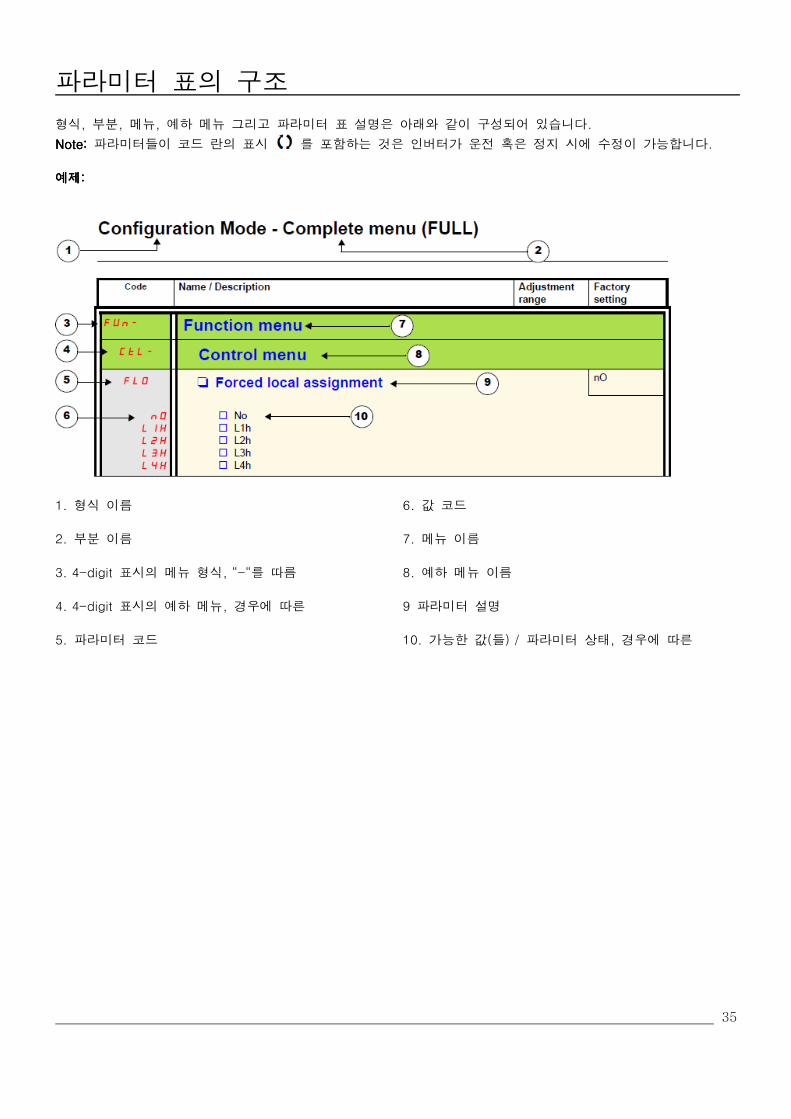
파라미터 표의 구조
형식, 부분, 메뉴, 예하 메뉴 그리고 파라미터 표 설명은 아래와 같이 구성되어 있습니다.
Note:Note:Note:Note: 파라미터들이 코드 란의 표시 를 포함하는 것은 인버터가 운전 혹은 정지 시에 수정이 가능합니다.
예제예제예제예제::::
1. 형식 이름
2. 부분 이름
3. 4-digit 표시의 메뉴 형식, “-“를 따름
4. 4-digit 표시의 예하 메뉴, 경우에 따른
5. 파라미터 코드
6. 값 코드
7. 메뉴 이름
8. 예하 메뉴 이름
9 파라미터 설명
10. 가능한 값(들) / 파라미터 상태, 경우에 따른

36
호환 기능 표
다단
속
도(p
. 70)
PI
조정
(p.7
2)
조그
운
전(p
.68)
자동
D
C 인
가(p
.67)
캐치
온
더
플라
이(p
.92)
빠른
정
지(p
.66)
자유
회
전(p
.66)
다단 속도(p. 70)
PI 조정(p.72)
조그 운전(p.68)
자동 DC 인가(p.67)
캐치 온 더 플라이(p.92)
빠른 정지(p.66)
자유 회전(p.66)
부적합한 기능들 적합한 기능들 적용 안됨
우선 순위 기능 (동시에 활성화가 가능한 기능)
화살 방향으로 다른 것에 대해 우선 순위를 갖는 기능을 표시합니다.
정지 기능은 운전 명령에 우선 순위합니다.
논리 명령에 의한 속도 참조는 아날로그 참조에 우선 순위합니다.
37
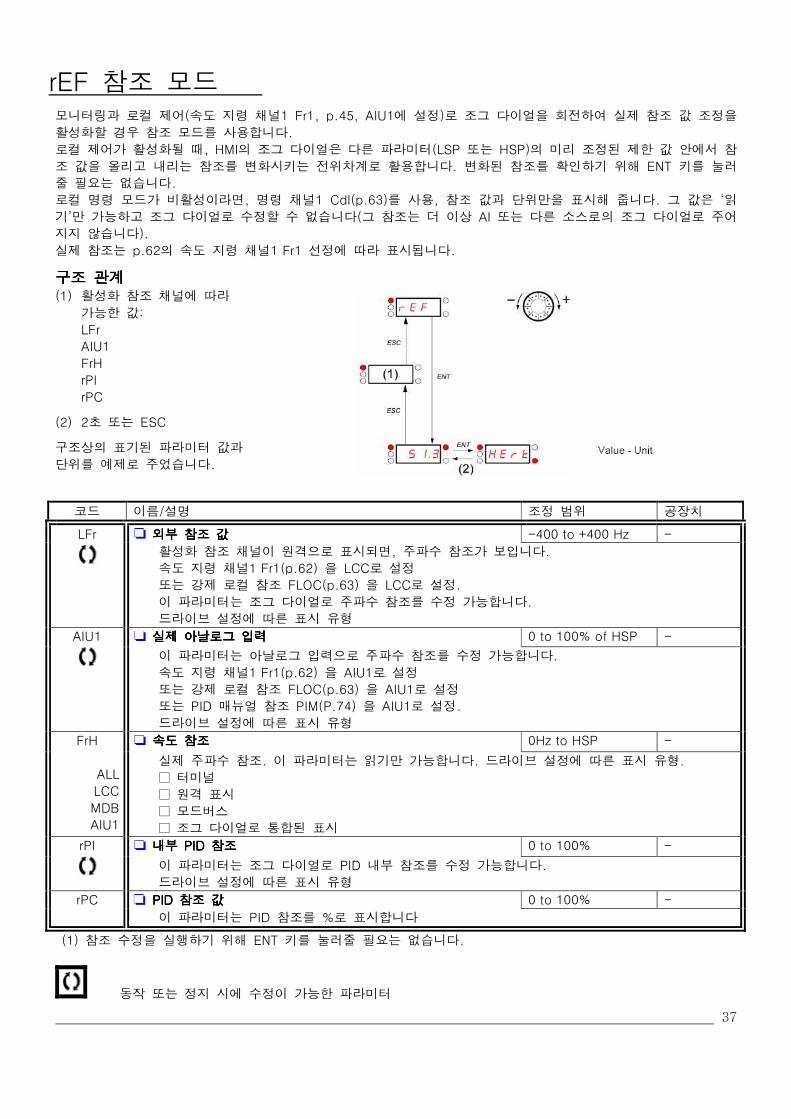
rEF 참조 모드
모니터링과 로컬 제어(속도 지령 채널1 Fr1, p.45, AIU1에 설정)로 조그 다이얼을 회전하여 실제 참조 값 조정을
활성화할 경우 참조 모드를 사용합니다.
로컬 제어가 활성화될 때, HMI의 조그 다이얼은 다른 파라미터(LSP 또는 HSP)의 미리 조정된 제한 값 안에서 참
조 값을 올리고 내리는 참조를 변화시키는 전위차계로 활용합니다. 변화된 참조를 확인하기 위해 ENT 키를 눌러
줄 필요는 없습니다.
로컬 명령 모드가 비활성이라면, 명령 채널1 CdI(p.63)를 사용, 참조 값과 단위만을 표시해 줍니다. 그 값은 ‘읽
기’만 가능하고 조그 다이얼로 수정할 수 없습니다(그 참조는 더 이상 AI 또는 다른 소스로의 조그 다이얼로 주어
지지 않습니다).
실제 참조는 p.62의 속도 지령 채널1 Fr1 선정에 따라 표시됩니다.
구조구조구조구조 관계관계관계관계 (1) 활성화 참조 채널에 따라
가능한 값:
LFr
AIU1
FrH
rPI
rPC
(2) 2초 또는 ESC
구조상의 표기된 파라미터 값과
단위를 예제로 주었습니다.
코드 이름/설명 조정 범위 공장치
외부외부외부외부 참조참조참조참조 값값값값 -400 to +400 Hz - LFr
활성화 참조 채널이 원격으로 표시되면, 주파수 참조가 보입니다.
속도 지령 채널1 Fr1(p.62) 을 LCC로 설정
또는 강제 로컬 참조 FLOC(p.63) 을 LCC로 설정.
이 파라미터는 조그 다이얼로 주파수 참조를 수정 가능합니다.
드라이브 설정에 따른 표시 유형
실제실제실제실제 아날로그아날로그아날로그아날로그 입력입력입력입력 0 to 100% of HSP - AIU1
이 파라미터는 아날로그 입력으로 주파수 참조를 수정 가능합니다.
속도 지령 채널1 Fr1(p.62) 을 AIU1로 설정
또는 강제 로컬 참조 FLOC(p.63) 을 AIU1로 설정
또는 PID 매뉴얼 참조 PIM(P.74) 을 AIU1로 설정.
드라이브 설정에 따른 표시 유형
속도속도속도속도 참조참조참조참조 0Hz to HSP - FrH
ALL
LCC
MDB
AIU1
실제 주파수 참조. 이 파라미터는 읽기만 가능합니다. 드라이브 설정에 따른 표시 유형.
터미널
원격 표시
모드버스
조그 다이얼로 통합된 표시
내부내부내부내부 PID PID PID PID 참조참조참조참조 0 to 100% - rPI
이 파라미터는 조그 다이얼로 PID 내부 참조를 수정 가능합니다.
드라이브 설정에 따른 표시 유형
PID PID PID PID 참조참조참조참조 값값값값 0 to 100% - rPC
이 파라미터는 PID 참조를 %로 표시합니다
(1) 참조 수정을 실행하기 위해 ENT 키를 눌러줄 필요는 없습니다.
동작 또는 정지 시에 수정이 가능한 파라미터
38
Mon 모니터링 모드
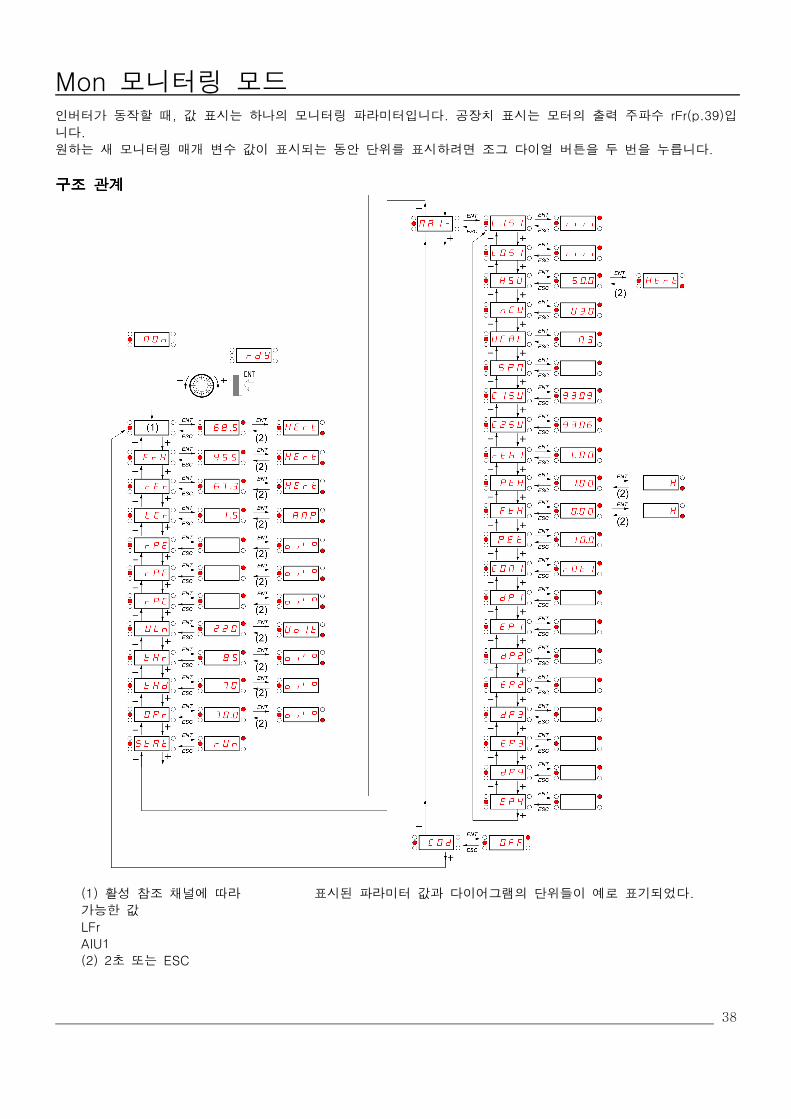
인버터가 동작할 때, 값 표시는 하나의 모니터링 파라미터입니다. 공장치 표시는 모터의 출력 주파수 rFr(p.39)입
니다.
원하는 새 모니터링 매개 변수 값이 표시되는 동안 단위를 표시하려면 조그 다이얼 버튼을 두 번을 누릅니다.
구조구조구조구조 관계관계관계관계
(1) 활성 참조 채널에 따라 표시된 파라미터 값과 다이어그램의 단위들이 예로 표기되었다.
가능한 값
LFr
AIU1
(2) 2초 또는 ESC
39
Mon 모니터링 모드
코드 이름/설명 단위
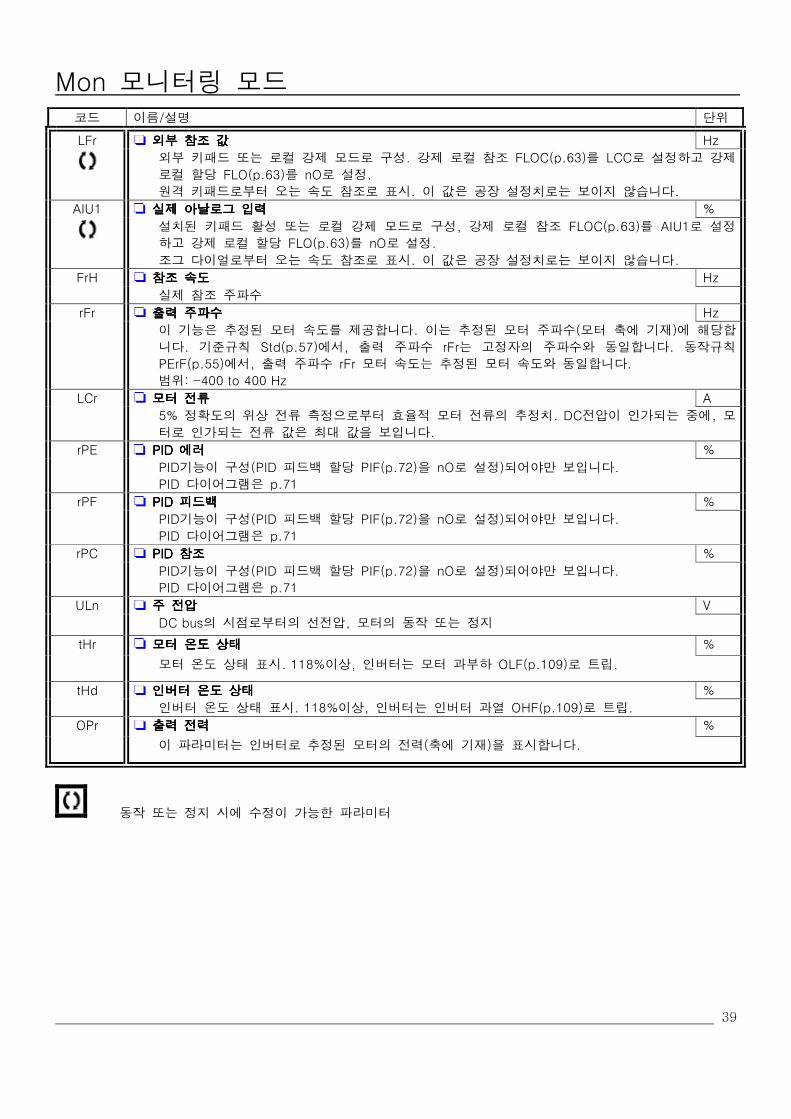
외부외부외부외부 참조참조참조참조 값값값값 Hz LFr
외부 키패드 또는 로컬 강제 모드로 구성. 강제 로컬 참조 FLOC(p.63)를 LCC로 설정하고 강제
로컬 할당 FLO(p.63)를 nO로 설정.
원격 키패드로부터 오는 속도 참조로 표시. 이 값은 공장 설정치로는 보이지 않습니다.
실제실제실제실제 아날로그아날로그아날로그아날로그 입력입력입력입력 % AIU1
설치된 키패드 활성 또는 로컬 강제 모드로 구성, 강제 로컬 참조 FLOC(p.63)를 AIU1로 설정
하고 강제 로컬 할당 FLO(p.63)를 nO로 설정.
조그 다이얼로부터 오는 속도 참조로 표시. 이 값은 공장 설정치로는 보이지 않습니다.
참조참조참조참조 속도속도속도속도 Hz FrH
실제 참조 주파수
출력출력출력출력 주파수주파수주파수주파수 Hz rFr
이 기능은 추정된 모터 속도를 제공합니다. 이는 추정된 모터 주파수(모터 축에 기재)에 해당합
니다. 기준규칙 Std(p.57)에서, 출력 주파수 rFr는 고정자의 주파수와 동일합니다. 동작규칙
PErF(p.55)에서, 출력 주파수 rFr 모터 속도는 추정된 모터 속도와 동일합니다.
범위: -400 to 400 Hz
모터모터모터모터 전류전류전류전류 A LCr
5% 정확도의 위상 전류 측정으로부터 효율적 모터 전류의 추정치. DC전압이 인가되는 중에, 모
터로 인가되는 전류 값은 최대 값을 보입니다.
PID PID PID PID 에러에러에러에러 % rPE
PID기능이 구성(PID 피드백 할당 PIF(p.72)을 nO로 설정)되어야만 보입니다.
PID 다이어그램은 p.71
PID PID PID PID 피드백피드백피드백피드백 % rPF
PID기능이 구성(PID 피드백 할당 PIF(p.72)을 nO로 설정)되어야만 보입니다.
PID 다이어그램은 p.71
PID PID PID PID 참참참참조조조조 % rPC
PID기능이 구성(PID 피드백 할당 PIF(p.72)을 nO로 설정)되어야만 보입니다.
PID 다이어그램은 p.71
주주주주 전압전압전압전압 V ULn
DC bus의 시점로부터의 선전압, 모터의 동작 또는 정지
모터모터모터모터 온도온도온도온도 상태상태상태상태 % tHr
모터 온도 상태 표시. 118%이상, 인버터는 모터 과부하 OLF(p.109)로 트립.
인버터인버터인버터인버터 온도온도온도온도 상태상태상태상태 % tHd
인버터 온도 상태 표시. 118%이상, 인버터는 인버터 과열 OHF(p.109)로 트립.
출력출력출력출력 전력전력전력전력 % OPr
이 파라미터는 인버터로 추정된 모터의 전력(축에 기재)을 표시합니다.
동작 또는 정지 시에 수정이 가능한 파라미터

40
Mon 모니터링 모드 코드 이름/설명 단위
StAt
rdy
rUn
ACC
dEc
dCb
CLI
nSt
Obr
CtL
tUn
FSt
nLP
제품제품제품제품 상태상태상태상태
이 파라미터는 인버터와 모터의 상태를 보여줍니다.
인버터 준비
인버터 동작, 코드 오른쪽에 마지막 여섯 부분에 방향 및 속도를 나타냅니다.
가속, 코드 오른쪽의 마지막 여섯 부분에 방향 및 속도를 나타냅니다.
감속, 코드 오른쪽의 마지막 여섯 부분에 방향 및 속도를 나타냅니다.
DC 인가 브레이크 상태
전류 한계, 표시 오른쪽의 네 부분이 깜빡입니다.
자유 회전 정지
감속 자동 적용
입력측 결상 시에 제어 정지
자동 튜닝 동작
빠른 정지
입력 전원 없음. 제어 부분이 RJ45로 전원을 공급받고, 주 전압에 전원이 없거나 실행
명령이 없을 때.
41
Mon 모니터링 모드
코드 이름/설명 단위
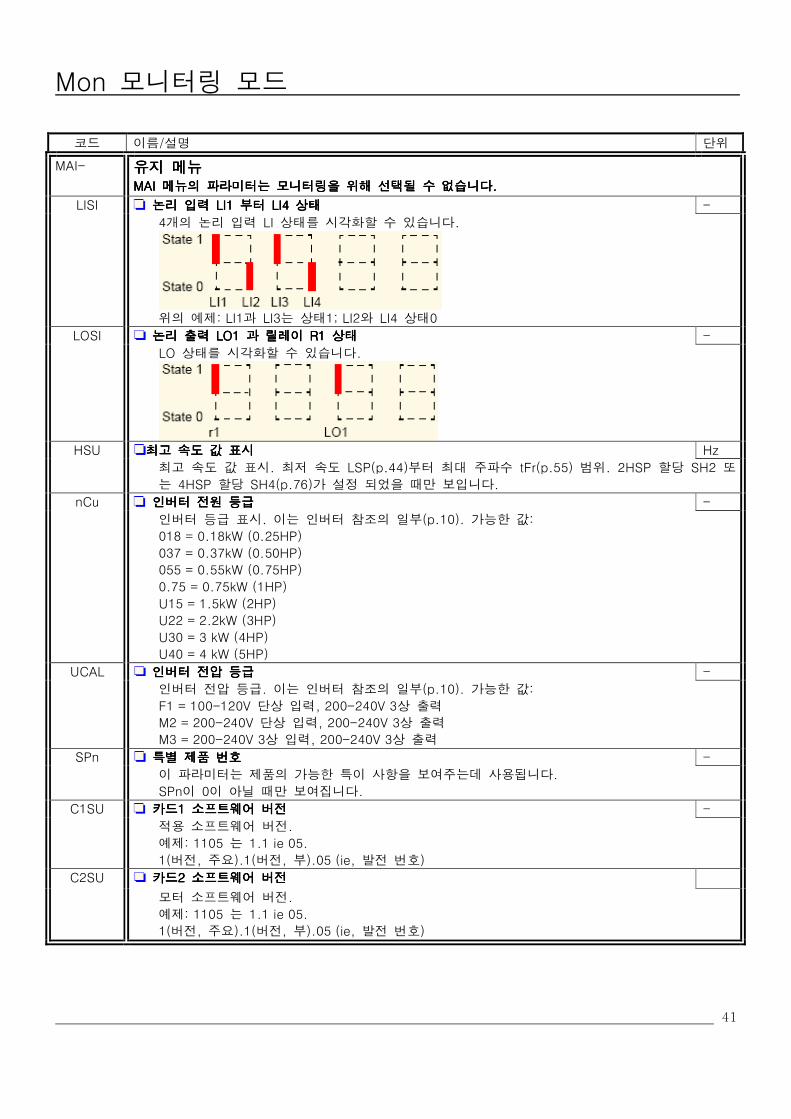
MAI- 유지유지유지유지 메뉴메뉴메뉴메뉴 MAI MAI MAI MAI 메뉴의메뉴의메뉴의메뉴의 파라미터는파라미터는파라미터는파라미터는 모니터링을모니터링을모니터링을모니터링을 위해위해위해위해 선택될선택될선택될선택될 수수수수 없습니다없습니다없습니다없습니다....
논리논리논리논리 입력입력입력입력 LI1 LI1 LI1 LI1 부터부터부터부터 LI4 LI4 LI4 LI4 상태상태상태상태 - LISI
4개의 논리 입력 LI 상태를 시각화할 수 있습니다.
위의 예제: LI1과 LI3는 상태1; LI2와 LI4 상태0
논리논리논리논리 출력출력출력출력 LO1 LO1 LO1 LO1 과과과과 릴레이릴레이릴레이릴레이 R1 R1 R1 R1 상태상태상태상태 - LOSI
LO 상태를 시각화할 수 있습니다.
최고최고최고최고 속도속도속도속도 값값값값 표시표시표시표시 Hz HSU
최고 속도 값 표시. 최저 속도 LSP(p.44)부터 최대 주파수 tFr(p.55) 범위. 2HSP 할당 SH2 또
는 4HSP 할당 SH4(p.76)가 설정 되었을 때만 보입니다.
인버터인버터인버터인버터 전원전원전원전원 등급등급등급등급 - nCu
인버터 등급 표시. 이는 인버터 참조의 일부(p.10). 가능한 값:
018 = 0.18kW (0.25HP)
037 = 0.37kW (0.50HP)
055 = 0.55kW (0.75HP)
0.75 = 0.75kW (1HP)
U15 = 1.5kW (2HP)
U22 = 2.2kW (3HP)
U30 = 3 kW (4HP)
U40 = 4 kW (5HP)
인버터인버터인버터인버터 전압전압전압전압 등급등급등급등급 - UCAL
인버터 전압 등급. 이는 인버터 참조의 일부(p.10). 가능한 값:
F1 = 100-120V 단상 입력, 200-240V 3상 출력
M2 = 200-240V 단상 입력, 200-240V 3상 출력
M3 = 200-240V 3상 입력, 200-240V 3상 출력
특별특별특별특별 제품제품제품제품 번호번호번호번호 - SPn
이 파라미터는 제품의 가능한 특이 사항을 보여주는데 사용됩니다.
SPn이 0이 아닐 때만 보여집니다.
카드카드카드카드1 1 1 1 소프트웨어소프트웨어소프트웨어소프트웨어 버전버전버전버전 - C1SU
적용 소프트웨어 버전.
예제: 1105 는 1.1 ie 05.
1(버전, 주요).1(버전, 부).05 (ie, 발전 번호)
카드카드카드카드2222 소프트웨어소프트웨어소프트웨어소프트웨어 버전버전버전버전 C2SU
모터 소프트웨어 버전.
예제: 1105 는 1.1 ie 05.
1(버전, 주요).1(버전, 부).05 (ie, 발전 번호)
42
Mon 모니터링 모드
코드 이름/설명 단위
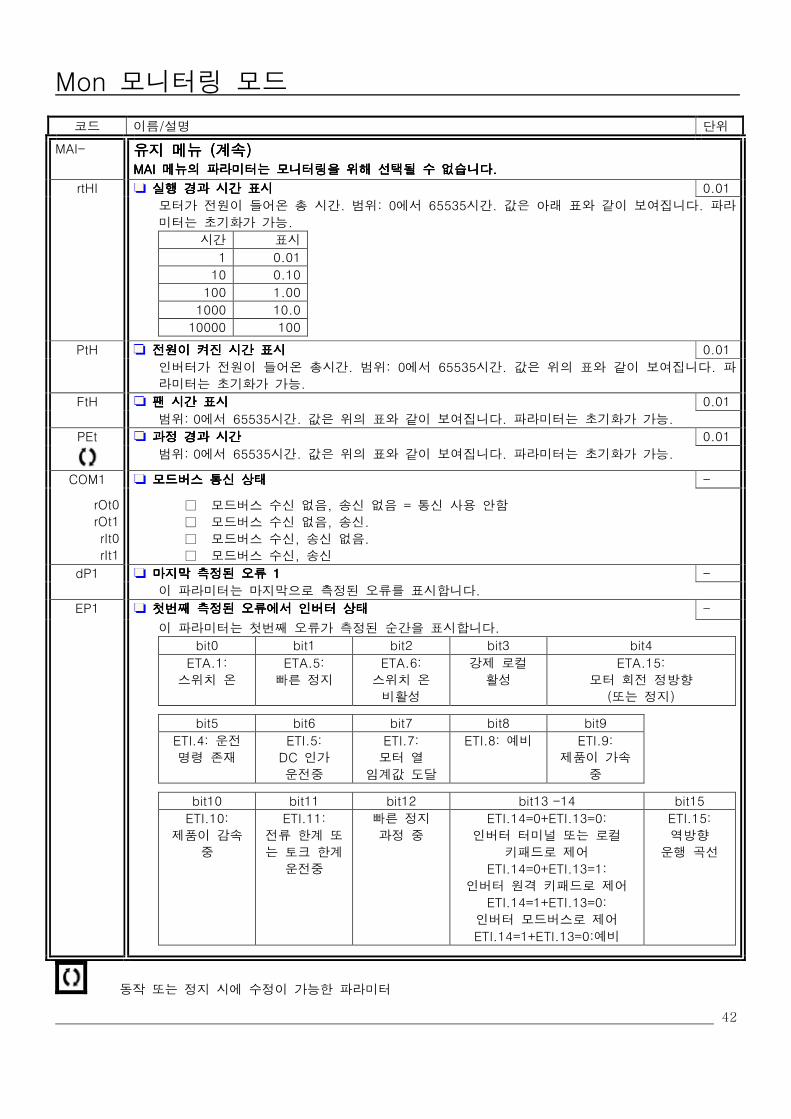
MAI- 유지유지유지유지 메뉴메뉴메뉴메뉴 ( ( ( (계속계속계속계속)))) MAI MAI MAI MAI 메뉴의메뉴의메뉴의메뉴의 파라미터는파라미터는파라미터는파라미터는 모니터링을모니터링을모니터링을모니터링을 위해위해위해위해 선택될선택될선택될선택될 수수수수 없습니다없습니다없습니다없습니다....
실행실행실행실행 경과경과경과경과 시간시간시간시간 표시표시표시표시 0.01 rtHI
모터가 전원이 들어온 총 시간. 범위: 0에서 65535시간. 값은 아래 표와 같이 보여집니다. 파라
미터는 초기화가 가능.
시간 표시
1 0.01
10 0.10
100 1.00
1000 10.0
10000 100
전원이전원이전원이전원이 켜진켜진켜진켜진 시간시간시간시간 표시표시표시표시 0.01 PtH
인버터가 전원이 들어온 총시간. 범위: 0에서 65535시간. 값은 위의 표와 같이 보여집니다. 파
라미터는 초기화가 가능.
팬팬팬팬 시간시간시간시간 표시표시표시표시 0.01 FtH
범위: 0에서 65535시간. 값은 위의 표와 같이 보여집니다. 파라미터는 초기화가 가능.
과정과정과정과정 경과경과경과경과 시간시간시간시간 0.01 PEt
범위: 0에서 65535시간. 값은 위의 표와 같이 보여집니다. 파라미터는 초기화가 가능.
모드버스모드버스모드버스모드버스 통신통신통신통신 상태상태상태상태 - COM1
rOt0
rOt1
rIt0
rIt1
모드버스 수신 없음, 송신 없음 = 통신 사용 안함
모드버스 수신 없음, 송신.
모드버스 수신, 송신 없음.
모드버스 수신, 송신
마지막마지막마지막마지막 측정된측정된측정된측정된 오류오류오류오류 1 1 1 1 - dP1
이 파라미터는 마지막으로 측정된 오류를 표시합니다.
첫번째첫번째첫번째첫번째 측정된측정된측정된측정된 오류에서오류에서오류에서오류에서 인버터인버터인버터인버터 상태상태상태상태 - EP1
이 파라미터는 첫번째 오류가 측정된 순간을 표시합니다.
bit0 bit1 bit2 bit3 bit4
ETA.1:
스위치 온
ETA.5:
빠른 정지
ETA.6:
스위치 온
비활성
강제 로컬
활성
ETA.15:
모터 회전 정방향
(또는 정지)
bit5 bit6 bit7 bit8 bit9
ETI.4: 운전
명령 존재
ETI.5:
DC 인가
운전중
ETI.7:
모터 열
임계값 도달
ETI.8: 예비 ETI.9:
제품이 가속
중
bit10 bit11 bit12 bit13 -14 bit15
ETI.10:
제품이 감속
중
ETI.11:
전류 한계 또
는 토크 한계
운전중
빠른 정지
과정 중
ETI.14=0+ETI.13=0:
인버터 터미널 또는 로컬
키패드로 제어
ETI.14=0+ETI.13=1:
인버터 원격 키패드로 제어
ETI.14=1+ETI.13=0:
인버터 모드버스로 제어
ETI.14=1+ETI.13=0:예비
ETI.15:
역방향
운행 곡선
동작 또는 정지 시에 수정이 가능한 파라미터

43
Mon 모니터링 모드
코드 이름/설명 조정 범위 공장치
MAI- 유지유지유지유지 메뉴메뉴메뉴메뉴 ( ( ( (계속계속계속계속)))) MAI MAI MAI MAI 메뉴의메뉴의메뉴의메뉴의 파라미터는파라미터는파라미터는파라미터는 모니터링을모니터링을모니터링을모니터링을 위해위해위해위해 선택될선택될선택될선택될 수수수수 없습니다없습니다없습니다없습니다....
마지막마지막마지막마지막 측정된측정된측정된측정된 오류오류오류오류 2 2 2 2 - dP2
이 파라미터는 두번째로 측정된 오류를 표시합니다.
두번째두번째두번째두번째 측정된측정된측정된측정된 오류에서오류에서오류에서오류에서 인버터인버터인버터인버터 상태상태상태상태 - EP2
이 파라미터는 두번째 오류가 측정된 순간을 표시합니다.
마지막마지막마지막마지막 측정된측정된측정된측정된 오류오류오류오류 3 3 3 3 - dP3
이 파라미터는 세번째로 측정된 오류를 표시합니다.
세번째세번째세번째세번째 측정된측정된측정된측정된 오류에서오류에서오류에서오류에서 인버터인버터인버터인버터 상태상태상태상태 - EP3
이 파라미터는 세번째 오류가 측정된 순간을 표시합니다.
마지막마지막마지막마지막 측정된측정된측정된측정된 오류오류오류오류 4 4 4 4 - dP4
이 파라미터는 네번째로 측정된 오류를 표시합니다.
네번째네번째네번째네번째 측정된측정된측정된측정된 오류에서오류에서오류에서오류에서 인버터인버터인버터인버터 상태상태상태상태 - EP4
이 파라미터는 네번째 오류가 측정된 순간을 표시합니다.
HMI HMI HMI HMI 패스워드패스워드패스워드패스워드 2 to 9999 OFF Cod
OFF
On
가능한 상태 값:
코드 비활성
코드 활성
범위 2에서 9999
코드를 잃어버린다면, Schneider Electric으로 연락합니다.
이 파라미터는 인버터에 접근을 제한하는 데 사용됩니다.
인버터를 잠그기 위해 HMI 패스워드 Cod 파라미터에서, 위의 범위 내 코드를 입력합니다.
한번 활성화되면, 코드 상태는 On으로 변합니다:
보호기능은 rEF(p.37)에 접근, Mon(p.38)모드에서만 가능하며, SoMove 사용 시를 제외합니다.
공장 설정치로 되돌리거나, FULL 섹션 접근이 비활성이면,
구성을 SoMove로 다운로드 가능하지만,
구성을 SoMove로 업로드는 불가능합니다.
인버터를 해제하기 위해, Cod 파라미터에서, 유효한 코드를 입력하고, ENT를 누릅니다.
코드 보호기능 제거는, 이후 가능하며, 조그 다이얼을 사용, OFF로 입력하고, ENT를 누릅니다.

44
ConF 설정 모드
설정 모드는 3부분을 포함합니다.:
1. 나의 메뉴는 11개의 공장 설정 파라미터들(이 중 9개가 공장치로 시각화)을 포함합니다. 25개의 파라미터
까지 SoMove 소프트웨어를 사용하여 사용자 지정이 가능합니다.
2. 저장/다시 불러오기 파라미터 설정: 이 2개의 기능은 사용자의 설정을 저장하고 다시 불러오기로 씁니다.
3. FULL: 이 메뉴는 모든 다른 파라미터들에 접근이 가능합니다. 6개의 하위 메뉴들을 포함:
- 매크로 구성 CFG – p.47
- 입력 출력 메뉴 I_O- - p.48
- 모터 제어 메뉴 drC – p.58
- 제어 메뉴 CtL – p.62
- 기능 메뉴 Fun – p.64
- 오류 검색 관리 메뉴 FLt – p.91
- 통신 메뉴 COM – p.97.
구조구조구조구조 관계관계관계관계
표시된 파라미터 값은 예시로만 주어진 것입니다.
(1) 참조 채널 활성에 의존.
가능한 값: LFr 또는 AIU1
(2) 2초 또는
ESC.
(3) 14개의 다른 선택 가능한 사용자 정의 파라미터
(FULL 목록) SoMove 사용.
45
ConF 설정 모드 – MyMenu
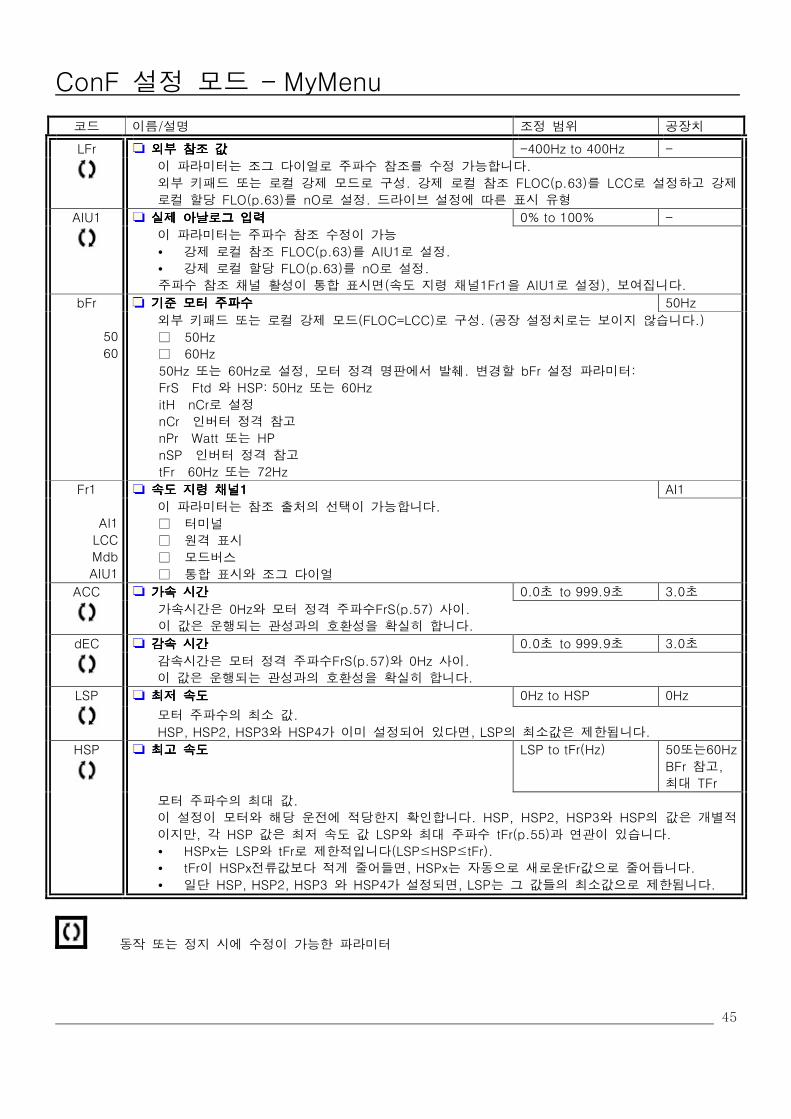
코드 이름/설명 조정 범위 공장치
외부외부외부외부 참조참조참조참조 값값값값 -400Hz to 400Hz - LFr
이 파라미터는 조그 다이얼로 주파수 참조를 수정 가능합니다.
외부 키패드 또는 로컬 강제 모드로 구성. 강제 로컬 참조 FLOC(p.63)를 LCC로 설정하고 강제
로컬 할당 FLO(p.63)를 nO로 설정. 드라이브 설정에 따른 표시 유형
실제실제실제실제 아날로그아날로그아날로그아날로그 입력입력입력입력 0% to 100% - AIU1
이 파라미터는 주파수 참조 수정이 가능
• 강제 로컬 참조 FLOC(p.63)를 AIU1로 설정.
• 강제 로컬 할당 FLO(p.63)를 nO로 설정.
주파수 참조 채널 활성이 통합 표시면(속도 지령 채널1Fr1을 AIU1로 설정), 보여집니다.
기준기준기준기준 모터모터모터모터 주파수주파수주파수주파수 50Hz bFr
50
60
외부 키패드 또는 로컬 강제 모드(FLOC=LCC)로 구성. (공장 설정치로는 보이지 않습니다.)
50Hz
60Hz
50Hz 또는 60Hz로 설정, 모터 정격 명판에서 발췌. 변경할 bFr 설정 파라미터:
FrS Ftd 와 HSP: 50Hz 또는 60Hz
itH nCr로 설정
nCr 인버터 정격 참고
nPr Watt 또는 HP
nSP 인버터 정격 참고
tFr 60Hz 또는 72Hz
속도속도속도속도 지령지령지령지령 채널채널채널채널1111 AI1 Fr1
AI1
LCC
Mdb
AIU1
이 파라미터는 참조 출처의 선택이 가능합니다.
터미널
원격 표시
모드버스
통합 표시와 조그 다이얼
가속가속가속가속 시간시간시간시간 0.0초 to 999.9초 3.0초 ACC
가속시간은 0Hz와 모터 정격 주파수FrS(p.57) 사이.
이 값은 운행되는 관성과의 호환성을 확실히 합니다.
감속감속감속감속 시간시간시간시간 0.0초 to 999.9초 3.0초 dEC
감속시간은 모터 정격 주파수FrS(p.57)와 0Hz 사이.
이 값은 운행되는 관성과의 호환성을 확실히 합니다.
최저최저최저최저 속도속도속도속도 0Hz to HSP 0Hz LSP
모터 주파수의 최소 값.
HSP, HSP2, HSP3와 HSP4가 이미 설정되어 있다면, LSP의 최소값은 제한됩니다.
최고최고최고최고 속도속도속도속도 LSP to tFr(Hz) 50또는60Hz
BFr 참고,
최대 TFr
HSP
모터 주파수의 최대 값.
이 설정이 모터와 해당 운전에 적당한지 확인합니다. HSP, HSP2, HSP3와 HSP의 값은 개별적
이지만, 각 HSP 값은 최저 속도 값 LSP와 최대 주파수 tFr(p.55)과 연관이 있습니다.
• HSPx는 LSP와 tFr로 제한적입니다(LSP≤HSP≤tFr).
• tFr이 HSPx전류값보다 적게 줄어들면, HSPx는 자동으로 새로운tFr값으로 줄어듭니다.
• 일단 HSP, HSP2, HSP3 와 HSP4가 설정되면, LSP는 그 값들의 최소값으로 제한됩니다.
동작 또는 정지 시에 수정이 가능한 파라미터

46
ConF 설정 모드 - MyMenu
코드 이름/설명 조정 범위 공장치
모터모터모터모터 정격정격정격정격 전력전력전력전력 NCV-5 to
NCV+2
인버터 정격
에 따름
nPr
모터 파라미터 선택MPC(p.60)가 nPr로 설정 시에 보입니다. nPr이 이용가능해지면, CoS는 사라
집니다. 모터 정격 전력은 명판에 주어집니다. 모터는 인버터 정격의 5단계 아래부터 2단계 위
까지 가능합니다.성능은 최대 1단계 다른 정격일 때, 적합합니다. 기준 모터 주파수 bFr(p.46)
이 50Hz로 설정되면, 모터 정격 전력 nPr단위는 kW일 것이며, 아니면, HP가 될것입니다.
사용자사용자사용자사용자 파라미터파라미터파라미터파라미터 설정설정설정설정 저장저장저장저장 nO SCS
nO
Str1
이 기능은 현재 설정 복구를 생성합니다.
기능 비활성
인버터 저장장치에 최근 설정을 저장합니다. SCS는 기능이 실행되자마자 nO로 자동적으로
변경됩니다.
인버터가 공장을 떠나면, 최근 설정과 복구 설정 모두 공장 치 설정으로 초기화됩니다.
공장치공장치공장치공장치/ / / / 회복된회복된회복된회복된 사용자사용자사용자사용자 파라미터파라미터파라미터파라미터 설정설정설정설정 nO FCS
nO
rEC1
InI
InI1
이 기능은 설정을 재저장 허용합니다.
기능 비활성.
FCS는 다음 동작 중 한가지라도 실행되자마자, nO로 자동적으로 변경됩니다.
최근 설정은 SCS로 이전에 저장된 복구 설정과 동일화 됩니다.
FCS는 이 동작이 실행되자마자, nO로 자동적으로 변경됩니다. rEC1은 복구가 수행되어야만
보여집니다. 이 값이 나타나면, InI1은 보이지 않습니다.
최근 설정이 공장 설정치와 동일화 됩니다. 이 값이 나타나면, InI1은 보이지 않습니다.
최근 설정이 SoMove로 이전에 정의된 복구 설정과 동일화 됩니다. 이 값이 나타나면, Ini와
rEC1은 보이지 않습니다.
DANGERDANGERDANGERDANGER
의도하지의도하지의도하지의도하지 않은않은않은않은 장비장비장비장비 운전운전운전운전
최근 설정의 수정이 사용된 결선 도표와 적합한지 확인합니다.
이러한이러한이러한이러한 사용법들의사용법들의사용법들의사용법들의 이행이행이행이행 실패는실패는실패는실패는, , , , 사망사망사망사망 또는또는또는또는 심각한심각한심각한심각한 부상을부상을부상을부상을 입을입을입을입을 수수수수 있습니다있습니다있습니다있습니다....
이 파라미터의 할당은 “ENT”키를 2초간 눌러서, 변경합니다.
인버터를인버터를인버터를인버터를 로컬로로컬로로컬로로컬로 제어하는제어하는제어하는제어하는 방법방법방법방법 공장 설정치에서 “RUN”,”STOP”과 조그 다이얼은 비활성화. 인버터를 로컬로 제어하기 위해서 다음 파라미터를
조정:
속도 지령 채널1 Fr1(p.44)를 AIU1로 설정.(조그 다이얼로 통합 표시).
LI LI LI LI 할당할당할당할당 정보정보정보정보 ATV12를 복합 할당 기능이 가능합니다(예: AC2 와 rrS를 같은 LI).
몇몇 기능들 또한 LIH(High) 또는 Lil(low)로 할당가능하며, 이는 할당된 기능이, LI의 high(LIH) 또는 low level(Lil)
로 활성화 됨을 의미합니다.

47
ConF 설정 모드 – 완성 메뉴(FULL)
코드 이름/설명 조정 범위 공장치
매크로매크로매크로매크로----설정설정설정설정 StS CFG
StS
PId
SPd
DANGERDANGERDANGERDANGER
의도하지의도하지의도하지의도하지 않은않은않은않은 장비장비장비장비 운전운전운전운전
선택된 매크로 설정이 사용된 결선 도표와 적합한지 확인합니다.
이러한이러한이러한이러한 사용법들의사용법들의사용법들의사용법들의 이행이행이행이행 실패는실패는실패는실패는, , , , 사망사망사망사망 또는또는또는또는 심각한심각한심각한심각한 부상을부상을부상을부상을 입을입을입을입을 수수수수 있습니다있습니다있습니다있습니다....
매크로 설정은 특별한 현장의 적용 사례에 적합한 파라미터들을 설정할 수 있는 바로가기를 제
공합니다.
3 매크로 설정이 이용 가능합니다:
Start/stop. 정방향만 할당됩니다.
PID 편차. PID 기능 활성화, AI1을 피드백, AIV1을 참조로 설정.
속도. LI를 특별한 현장의 적용 사례에 속도를 높이는 기능 설정을 제공하는 다단 속도
(ATV11과 같은 할당)로 할당합니다.
매크로 설정 선택은 이 매크로 설정 안의 파라미터에서 할당합니다.
각 매크로 설정은 다른 메뉴에서도 수정이 가능합니다.
입력/출력 또는 파라미터 Start / Stop PID 편차 속도
AI1 참조 채널1 PID 피드백 No
AIV1 No 참조 채널1
AO1 No
LO1 No
R1 인버터 오류 검색 없음
L1h (2-wire) 정방향
L2h (2-wire) No 역방향
L3h (2-wire) No 자동/수동 2 다단속도
L4h (2-wire) 4 다단속도
L1h (3-wire) 정지
L2h (3-wire) 정방향
L3h (3-wire) No 역방향
L4h (3-wire) No 자동/수동 2 다단속도
FrI (참조 채널 1) AIU1 AIU1
Ctt (모터 제어 형식) PUMP
rIn (역방향 금지) YES
AI1t (AI1t 형식) OR
LFLI (4-20mA 손실) YES
SP2 (다단 속도 2) 10.0
SP2 (다단 속도 3) 25.0
SP2 (다단 속도 4) 50.0
MPC (모터 파라미터 선택) COS
AdC (자동 DC 인가) YES YES YES
이 파라미터의 할당은 “ENT”키를 2초간 눌러서, 변경합니다.

48
ConF 설정 모드 – 완성 메뉴(FULL)
코드 이름/설명 조정 범위 공장치
I_O- 입력입력입력입력 출력출력출력출력 메뉴메뉴메뉴메뉴
제어제어제어제어 방식방식방식방식 2C tCC
2 선식 제어(p.51)
입력의 개폐 상태로 운전 또는 정지 제어
“source” 결선의 예:
3 선식 제어(p.51)
“정방향” 또는 “역방향” 펄스는 운전 명령으로 충분하고, “정지” 펄스는 정지 명령으로 충분
합니다.
“source” 결선의 예:
DANGERDANGERDANGERDANGER
의도하지의도하지의도하지의도하지 않은않은않은않은 장비장비장비장비 운전운전운전운전 다음 기능은 공장 설정치로 되돌려질 것입니다: 2선식 제어 tCt(p.51)에서 논리 입력으로 할당된
모든 기능.
선택된 매크로 설정 또한 사용자 지정(사용자 설정 손실)이 된다면, 초기화 될 것입니다. 이 변경
이 선택된 결선 도표와 적합한지 확인합니다.
이러한이러한이러한이러한 사용법들의사용법들의사용법들의사용법들의 이행이행이행이행 실패는실패는실패는실패는, , , , 사망사망사망사망 또는또는또는또는 심각한심각한심각한심각한 부상을부상을부상을부상을 입을입을입을입을 수수수수 있습니다있습니다있습니다있습니다....
이 파라미터의 할당은 “ENT”키를 2초간 눌러서, 변경합니다.
LI1: 정방향
LIx: 역방향
LI1: 정지
LI2: 정방향
LIx: 역방향

49
ConF 설정 모드 – 완성 메뉴(FULL)
2222선식선식선식선식 제어제어제어제어 도표도표도표도표(p.51)
인버터 전원 인가와 준비
2선식 일시적 검색
역방향은 공장치 설정이 아닙니다. 역방향 설정rrS(p.66)을 봅니다.
동시에 인가되는 정방향과 역방향은 정방향으로 모터 운전을 제공합니다.
50
ConF 설정 모드 – 완성 메뉴(FULL)
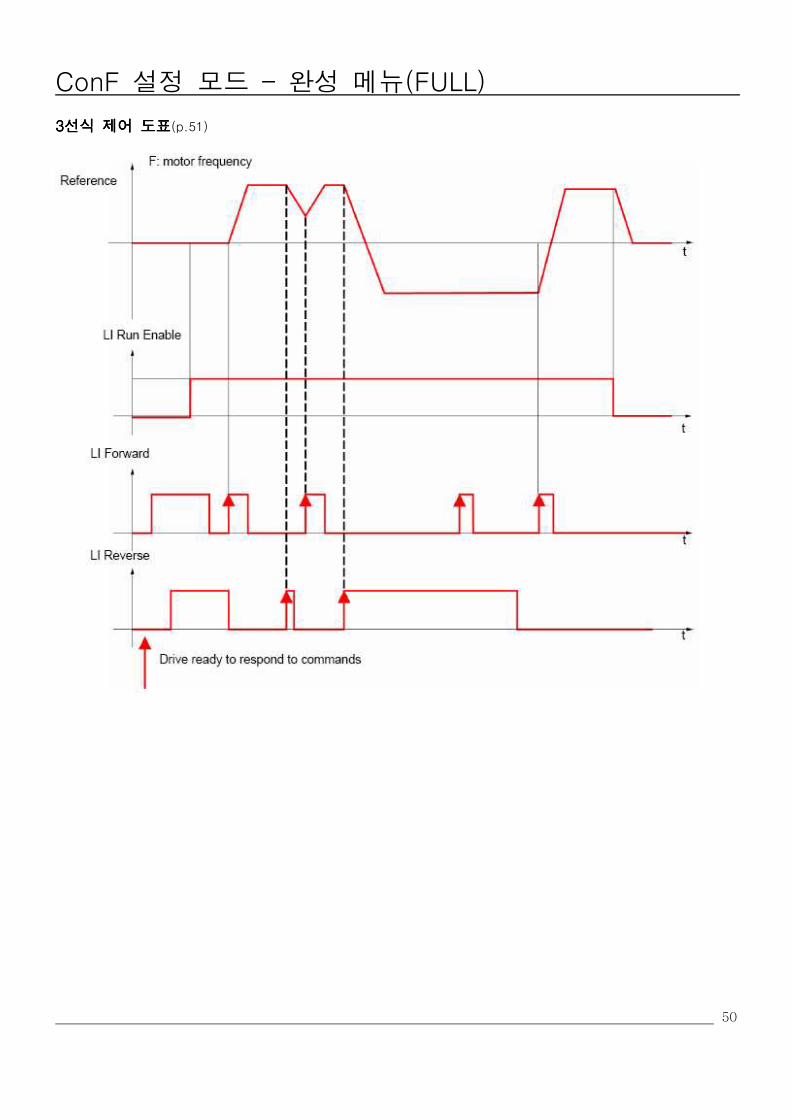
3333선식선식선식선식 제어제어제어제어 도표도표도표도표(p.51)

51
ConF 설정 모드 – 완성 메뉴(FULL)
코드 이름/설명 조정 범위 공장치
I_O- 입력입력입력입력 출력출력출력출력 메뉴메뉴메뉴메뉴 ( ( ( (계속계속계속계속)))) 2 2 2 2 선식선식선식선식 제어제어제어제어 방식방식방식방식 trn tCt
LEL
trn
PFO
DANGERDANGERDANGERDANGER
의도하지의도하지의도하지의도하지 않은않은않은않은 장비장비장비장비 운전운전운전운전
2선식 제어 방식 선택된 결선 도표와 적합한지 확인합니다.
이러한이러한이러한이러한 사용법들의사용법들의사용법들의사용법들의 이행이행이행이행 실패는실패는실패는실패는, , , , 사망사망사망사망 또는또는또는또는 심각한심각한심각한심각한 부상을부상을부상을부상을 입을입을입을입을 수수수수 있습니다있습니다있습니다있습니다....
2선식 제어 방식 파라미터는 제어 방식tCC(p.48)이 2C로 설정 시에만, 접근 가능합니다.
레벨: 0또는 1로 운전이나 정지를 설정.
전환: 전원 차단상태 이후 기동으로 인한 사고를 방지하도록 운전을 시작하기 위한 상태로
변환.
정방향 우선: 0또는 1로 운전이나 정지를 설정하지만, “정방향” 입력은 “역방향” 입력보다
항상 우선
논리논리논리논리 입력입력입력입력 방식방식방식방식 POS nPL
POS
nEG
정: 전압이 11V(예;+24V 터미널)와 같거나 높을 때 입력이 활성화(1상태). 인버터의 연결이
끊겼거나, 전압이 5V보다 낮을 때 입력이 비활성화(0상태).
역: 전압이 10V(예;COM 터미널)보다 낮을 때, 입력이 활성화(1상태). 전압이 16V와 같거나
높을 때 또는 인버터의 연결이 끊겼을 때, 비활성화(0상태).
제어 연결 도표를 봅니다(p.25).
52
ConF 설정 모드 – 완성 메뉴(FULL)
코드 이름/설명 조정 범위 공장치
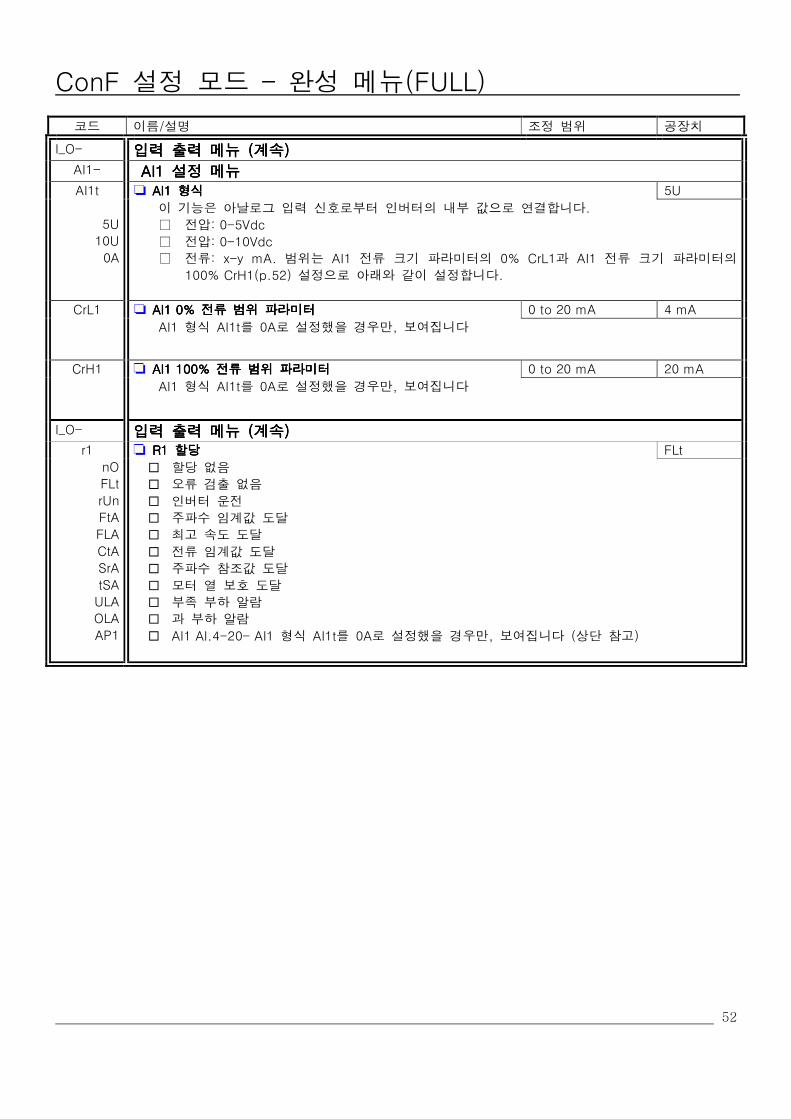
I_O- 입력입력입력입력 출력출력출력출력 메뉴메뉴메뉴메뉴 ( ( ( (계속계속계속계속)))) AI1- AI1 AI1 AI1 AI1 설정설정설정설정 메뉴메뉴메뉴메뉴
AI1 AI1 AI1 AI1 형식형식형식형식 5U AI1t
5U
10U
0A
이 기능은 아날로그 입력 신호로부터 인버터의 내부 값으로 연결합니다.
전압: 0-5Vdc
전압: 0-10Vdc
전류: x-y mA. 범위는 AI1 전류 크기 파라미터의 0% CrL1과 AI1 전류 크기 파라미터의
100% CrH1(p.52) 설정으로 아래와 같이 설정합니다.
AI1 0% AI1 0% AI1 0% AI1 0% 전류전류전류전류 범위범위범위범위 파라미터파라미터파라미터파라미터 0 to 20 mA 4 mA CrL1
AI1 형식 AI1t를 0A로 설정했을 경우만, 보여집니다
AI1 100% AI1 100% AI1 100% AI1 100% 전류전류전류전류 범위범위범위범위 파라미터파라미터파라미터파라미터 0 to 20 mA 20 mA CrH1
AI1 형식 AI1t를 0A로 설정했을 경우만, 보여집니다
I_O- 입력입력입력입력 출력출력출력출력 메뉴메뉴메뉴메뉴 ( ( ( (계속계속계속계속)))) R1 R1 R1 R1 할당할당할당할당 FLt r1
nO
FLt
rUn
FtA
FLA
CtA
SrA
tSA
ULA
OLA
AP1
할당 없음
오류 검출 없음
인버터 운전
주파수 임계값 도달
최고 속도 도달
전류 임계값 도달
주파수 참조값 도달
모터 열 보호 도달
부족 부하 알람
과 부하 알람
AI1 AI.4-20- AI1 형식 AI1t를 0A로 설정했을 경우만, 보여집니다 (상단 참고)
53
ConF 설정 모드 – 완성 메뉴(FULL)
코드 이름/설명 조정 범위 공장치
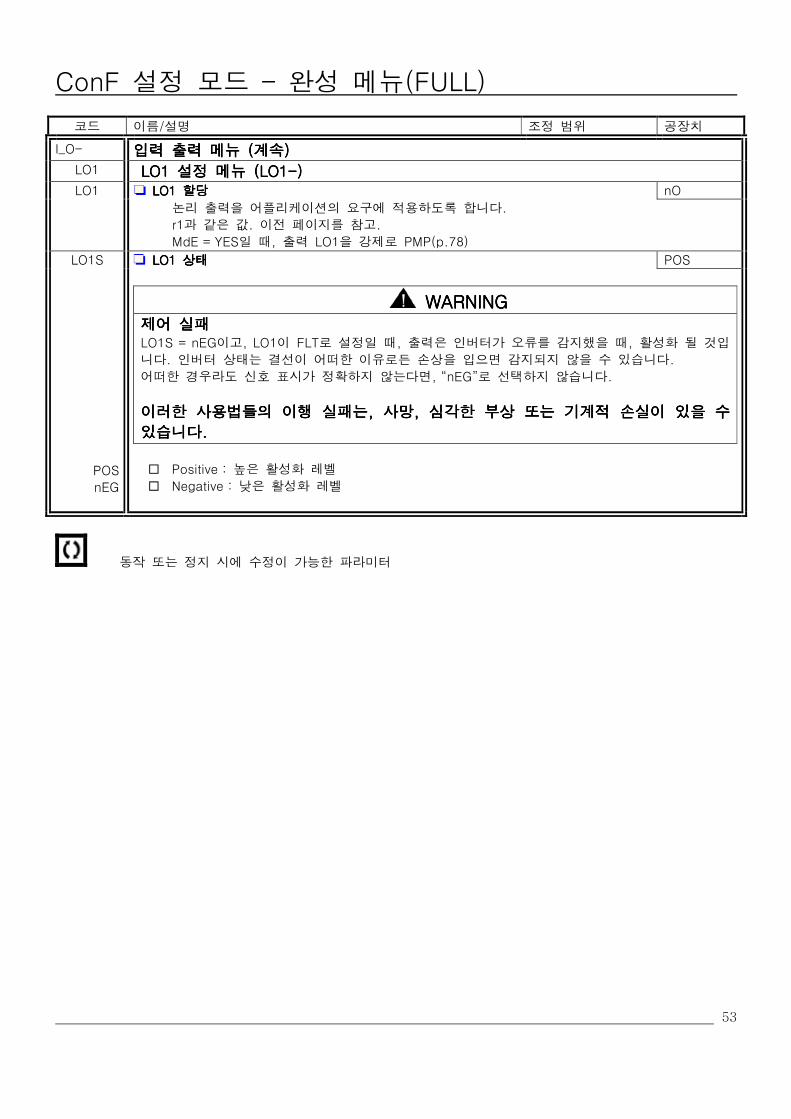
I_O- 입력입력입력입력 출력출력출력출력 메뉴메뉴메뉴메뉴 ( ( ( (계속계속계속계속)))) LO1 LO1 LO1 LO1 LO1 설정설정설정설정 메뉴메뉴메뉴메뉴 (LO1 (LO1 (LO1 (LO1----))))
LO1 LO1 LO1 LO1 할당할당할당할당 nO LO1
논리 출력을 어플리케이션의 요구에 적용하도록 합니다.
r1과 같은 값. 이전 페이지를 참고.
MdE = YES일 때, 출력 LO1을 강제로 PMP(p.78)
LO1 LO1 LO1 LO1 상태상태상태상태 POS LO1S
POS
nEG
WARNING WARNING WARNING WARNING 제어제어제어제어 실패실패실패실패 LO1S = nEG이고, LO1이 FLT로 설정일 때, 출력은 인버터가 오류를 감지했을 때, 활성화 될 것입
니다. 인버터 상태는 결선이 어떠한 이유로든 손상을 입으면 감지되지 않을 수 있습니다.
어떠한 경우라도 신호 표시가 정확하지 않는다면, “nEG”로 선택하지 않습니다.
이러한이러한이러한이러한 사용법들의사용법들의사용법들의사용법들의 이행이행이행이행 실패는실패는실패는실패는, , , , 사망사망사망사망, , , , 심각한심각한심각한심각한 부상부상부상부상 또는또는또는또는 기계적기계적기계적기계적 손실이손실이손실이손실이 있을있을있을있을 수수수수
있습니다있습니다있습니다있습니다....
Positive : 높은 활성화 레벨
Negative : 낮은 활성화 레벨
동작 또는 정지 시에 수정이 가능한 파라미터
54
ConF 설정 모드 – 완성 메뉴(FULL)
코드 이름/설명 조정 범위 공장치
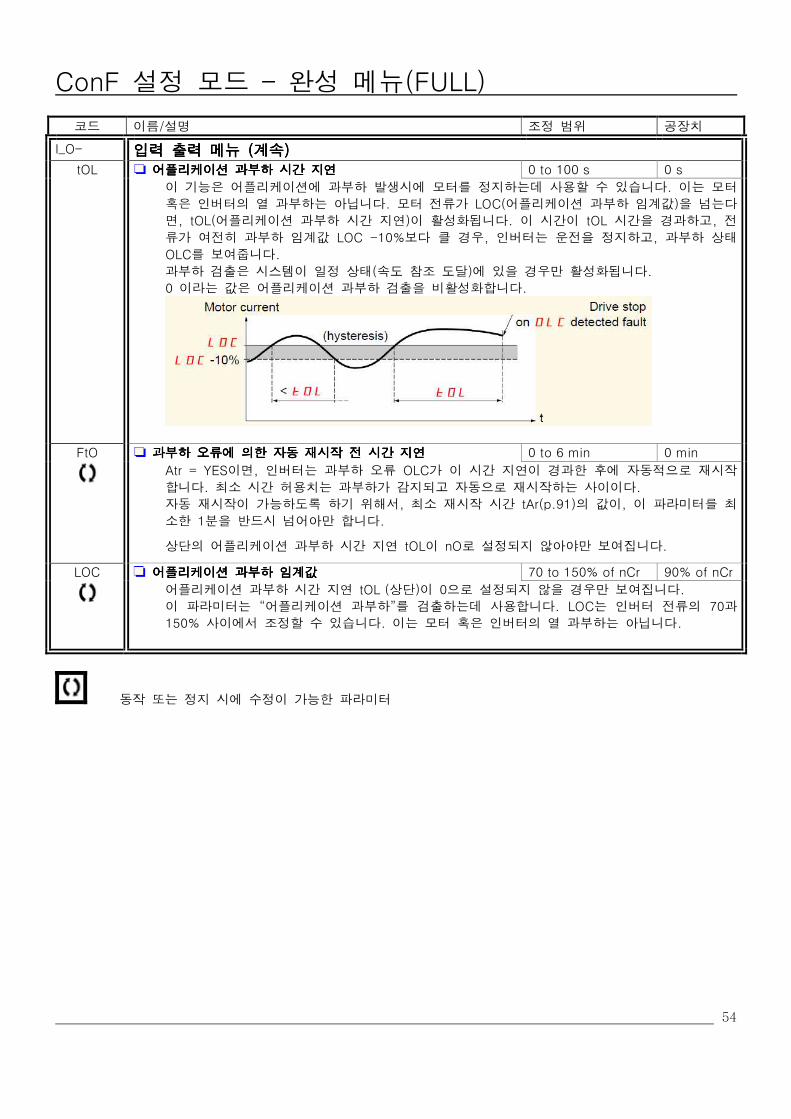
I_O- 입력입력입력입력 출력출력출력출력 메뉴메뉴메뉴메뉴 ( ( ( (계속계속계속계속)))) 어플리케이션어플리케이션어플리케이션어플리케이션 과부하과부하과부하과부하 시간시간시간시간 지연지연지연지연 0 to 100 s 0 s tOL
이 기능은 어플리케이션에 과부하 발생시에 모터를 정지하는데 사용할 수 있습니다. 이는 모터
혹은 인버터의 열 과부하는 아닙니다. 모터 전류가 LOC(어플리케이션 과부하 임계값)을 넘는다
면, tOL(어플리케이션 과부하 시간 지연)이 활성화됩니다. 이 시간이 tOL 시간을 경과하고, 전
류가 여전히 과부하 임계값 LOC -10%보다 클 경우, 인버터는 운전을 정지하고, 과부하 상태
OLC를 보여줍니다.
과부하 검출은 시스템이 일정 상태(속도 참조 도달)에 있을 경우만 활성화됩니다.
0 이라는 값은 어플리케이션 과부하 검출을 비활성화합니다.
과부하과부하과부하과부하 오류에오류에오류에오류에 의한의한의한의한 자동자동자동자동 재시작재시작재시작재시작 전전전전 시간시간시간시간 지연지연지연지연 0 to 6 min 0 min FtO
Atr = YES이면, 인버터는 과부하 오류 OLC가 이 시간 지연이 경과한 후에 자동적으로 재시작
합니다. 최소 시간 허용치는 과부하가 감지되고 자동으로 재시작하는 사이이다.
자동 재시작이 가능하도록 하기 위해서, 최소 재시작 시간 tAr(p.91)의 값이, 이 파라미터를 최
소한 1분을 반드시 넘어아만 합니다.
상단의 어플리케이션 과부하 시간 지연 tOL이 nO로 설정되지 않아야만 보여집니다.
어플리케이션어플리케이션어플리케이션어플리케이션 과부하과부하과부하과부하 임계값임계값임계값임계값 70 to 150% of nCr 90% of nCr LOC
어플리케이션 과부하 시간 지연 tOL (상단)이 0으로 설정되지 않을 경우만 보여집니다.
이 파라미터는 “어플리케이션 과부하”를 검출하는데 사용합니다. LOC는 인버터 전류의 70과
150% 사이에서 조정할 수 있습니다. 이는 모터 혹은 인버터의 열 과부하는 아닙니다.
동작 또는 정지 시에 수정이 가능한 파라미터

55
ConF 설정 모드 – 완성 메뉴(FULL)
코드 이름/설명 조정 범위 공장치
I_O- 입력입력입력입력 출력출력출력출력 메뉴메뉴메뉴메뉴 ( ( ( (계속계속계속계속)))) 어플리케이션어플리케이션어플리케이션어플리케이션 부족부하부족부하부족부하부족부하 시간시간시간시간 지연지연지연지연 0 to 100 s 0 s ULt
ULt 는 0과 100 사이에서 조정이 가능합니다.
모터 전류가 부족부하 임계값 LUL로 도달하지 못하고 조정 가능한 시간 지연보다 긴 경우, 인
버터가 운전 정지하고 ULF(부족부하 오류 상태)를 보여줍니다. (p.96)
부족부하 검출은 시스템이 일정 상태(속도 참조 도달)에 있을 경우만 활성화됩니다.
0 이라는 값은 어플리케이션 과부하 검출을 비활성화합니다.
어플리케이션어플리케이션어플리케이션어플리케이션 부족부하부족부하부족부하부족부하 임계값임계값임계값임계값 20 to 100% of nCr 60% LUL
어플리케이션 부족부하 시간 지연 ULt가 0으로 설정되지 않을 경우만 보여집니다. 이 파라미터
는 모터의 어플리케이션 부족부하 상태를 검출하는데 사용합니다. 어플리케이션 부족부하 임계
값 LUL은 인버터 전류의 20과 100% 사이에서 조정할 수 있습니다.
부족부족부족부족 부하부하부하부하 오오오오류에류에류에류에 의한의한의한의한 자동자동자동자동 재시작재시작재시작재시작 전전전전 시간시간시간시간 지연지연지연지연 0 to 6 min 0 min FtU
Atr = YES이면, 인버터는 부족 부하 오류 ULF가 이 시간 지연이 경과한 후에 자동적으로 재시
작합니다. 최소 시간 허용치는 과부하가 감지되고 자동으로 재시작하는 사이이다.
자동 재시작이 가능하도록 하기 위해서, 최소 재시작 시간 tAr(p.91)의 값이, 이 파라미터를 최
소한 1분을 반드시 넘어아만 합니다.
상단의 어플리케이션 과부하 시간 지연 Ult가 nO로 설정되지 않아야만 보여집니다.
모터모터모터모터 주파수주파수주파수주파수 임계값임계값임계값임계값 0 to 400 Hz 50 or 60 Hz
인터버 정격
에 따름
Ftd
R1 할당 r1(p.51) 또는 LO1 할당 LO1(p.52)가 FtA로 설정된 경우만 보여집니다.
모터모터모터모터 전류전류전류전류 임계값임계값임계값임계값 0 to 1.5 In(1) InV Ctd
R1 할당 r1(p.51) 또는 LO1 할당 LO1(p.52)가 CtA로 설정된 경우만 보여집니다.
모터모터모터모터 열열열열 상태상태상태상태 임계값임계값임계값임계값 0 to 118% of tHr 100% ttd
R1 할당 r1(p.51)가 tSA로 설정된 경우만 보여집니다.
모터 열 알람의 오류 임계값 (논리 출력 또는 릴레이)
(1) In = 인버터 전류
동작 또는 정지 시에 수정이 가능한 파라미터

56
ConF 설정 모드 – 완성 메뉴(FULL)
코드 이름/설명 조정 범위 공장치
I_O- 입력입력입력입력 출력출력출력출력 메뉴메뉴메뉴메뉴 ( ( ( (계속계속계속계속)))) AO1- AAAAO1 O1 O1 O1 설정설정설정설정 메뉴메뉴메뉴메뉴
AO1 AO1 AO1 AO1 할당할당할당할당 nO AO1
nO
OCr
OFr
Orp
OPS
OPF
OPE
OPr
tHr
tHd
이 파라미터는 아날로그 출력 값을 설정하는데 사용합니다.
할당 없음
모터 전류
출력 주파수
램프 출력
PID 참조 – PID 피드백 할당 PIF(p.72) dl nO로 설정되지 않을 경우만 보여집니다.
PID 피드백 - PID 피드백 할당 PIF(p.72) dl nO로 설정되지 않을 경우만 보여집니다.
PID 오류 - PID 피드백 할당 PIF(p.72) dl nO로 설정되지 않을 경우만 보여집니다.
출력 전력
모터 열 상태
인버터 열 상태
AO1 AO1 AO1 AO1 형식형식형식형식 0A AO1t
10U
0A
4A
이 파라미터는 인버터 내부 값과 아날로그 출력 신호 사이를 연결합니다.
전압 : 0-10 Vdc
전류 : 0-20 mA
전류 : 4-20 mA
57
ConF 설정 모드 – 완성 메뉴(FULL)
코드 이름/설명 조정 범위 공장치
drC- 모터모터모터모터 제어제어제어제어 메뉴메뉴메뉴메뉴
기기기기준준준준 모터모터모터모터 주파수주파수주파수주파수 50 Hz bFr
p.44 참고
모터모터모터모터 정격정격정격정격 전력전력전력전력 NCV -5 to
NCV +2
인버터 정격에 따름 nPr
p.45 참고
모터모터모터모터 정격정격정격정격 cos phi cos phi cos phi cos phi 0.5 to 1 인버터 정격에 따름 CoS
모터 파라미터 선택 MPC(p.60)이 CoS로 설정된 경우만 보입니다. 모터 정격 cos phi CoS가
사용 가능하면, 모터 정격 전력 nPr은 사라집니다.
모터 명판 역률 (pf).
NoteNoteNoteNote: 모터 “Service Factor”와 혼동하지 말 것. CoS를 1에 매우 근접하게 설정하면 모터 운전
이 불만족스러운 결과일수 있습니다. 모터 역률이 명판에 표기되지 않은 경우, 이 파라미터를
공장 설정치(대략 0.80)로 둡니다.
모터모터모터모터 정격정격정격정격 전압전압전압전압 100 to 480 V 230 V UnS
모터 정격 전압은 모터 명판에 기재. 선전압이 모터 정격 전압보다 낮은 경우, 모터 정격 전압
UnS는 인버터 접점으로 적용되는 선전압 값으로 설정해야만 합니다.
모터모터모터모터 정격정격정격정격 전류전류전류전류 0.25 In to 1.5
In(1)
인버터 정격에 따름 nCr
모터 정격 전류는 모터 명판에 기재. 모터 정격 전류 nCr은 모터 열 전류 itH(p.94)을 변화시킵
니다.
모터모터모터모터 정격정격정격정격 주파수주파수주파수주파수 10 to 400 Hz 50 Hz FrS
모터 정격 주파수는 모터 명판에 기재.
공장 설정치는 50 Hz, 또는 기준 모터 주파수 bFr(p.46)이 60Hz로 설정될 경우, 사전 설정은
60 Hz.
모터모터모터모터 정격정격정격정격 속도속도속도속도 0 to 24000 rPM 인버터 정격에 따름 nSP
모터 정격 속도는 모터 명판에 기재.
최대최대최대최대 주파수주파수주파수주파수 10 to 400 Hz 60 Hz tFr
최대 주파수 tFr은 최고 속도 HSP(p.76)의 가능한 상한 값으로 주어집니다.
공장 설정치는 60 Hz, 또는 기준 모터 주파수 bFr(p.55)이 60Hz로 설정될 경우, 사전 설정은
72 Hz.
모터모터모터모터 제어제어제어제어 형식형식형식형식 Std Ctt
PErF
Std
PUMP
모터 제어 형식은 어플리케이션과 요구되는 성능에 맞게 선택할 수 있습니다.
성능: SVCU; Sensorless Vector Control과 전압 피드백 계산에 근거한 내부 속도 루프. 시작과
운전 중에 높은 성능이 요구되는 어플리케이션을 위함.
기준: U/F 2 (전압/주파수) 내부 속도 루프 없음
높은 성능이 요구되지 않는 간단한 어플리케이션. 간단 모터 제어 방식은 일정한 전압 주파수
비를 유지, 곡선의 아래쪽에서 조절 가능.
이 방식은 모터가 병렬 연결할 때 일반적입니다. 모터가 병렬로 연결된 몇몇 특별한 어플리케
이션과 높은 성능 레벨은 PErF가 필요할 수 있습니다.
펌프: U2/F; 가변 토크인 펌프와 팬 어플리케이션은 높은 시작 토크가 필요하지 않습니다.
(1) In = 인버터 전류

58
ConF 설정 모드 – 완성 메뉴(FULL)
코드 이름/설명 조정 범위 공장치
drC- 모터모터모터모터 제어제어제어제어 메뉴메뉴메뉴메뉴 ( ( ( (계속계속계속계속)))) IR IR IR IR 보상보상보상보상 (law U/F) (law U/F) (law U/F) (law U/F) 25 to 200% 100% UFr
매우 낮은 속도에서 토크를 최적화하거나, 특별한 경우들(예:병렬 연결 모터, IR 보상 (law U/F)
UFr)을 적용하는데 사용합니다. 저속에서 토크가 부족하면, IR 보상(law U/F) UFr을 높여줍니다.
너무 높은 값은 모터가 시작하지 않거나(잠금) 전류 제한 모드를 변화시키는 요인이 될 수 있습
니다.
슬립슬립슬립슬립 보상보상보상보상 0 to 150% 100% SLP
모터 제어 형식 Ctt (p.55)가 PUMP로 설정되지 않은 경우만 보입니다.
모터 슬립과 비슷한 값으로 슬립 보상을 조정하거나, 특별한 경우들(예:병렬 연결 모터, 슬립 보
상 SLP 감소)을 적용하는데 사용합니다.
슬립 보상이 실제 슬립 보상보다 작게 설정되는 경우, 모터가 참조 값보다 작지 않은 속도로 안
정된 상태에서 정상 속도로 동작하지 않을 수 있습니다.
슬립 보상이 실제 슬립 보상보다 크게 설정되는 경우, 모터 속도가 일정하지 않을 수 있습니다.
주파수주파수주파수주파수 루프루프루프루프 안정성안정성안정성안정성 0 to 100% 20% StA
StA 파라미터는 가속의 끝에서 지나치거나 진동하는 것을 줄여주는데 사용할 수 있습니다. 가속
또는 감속 기간 후에, StA는 동적 기계를 안정된 상태로 되돌리는데 적용합니다;
너무 높은 값은 반응 시간을 연장하는 원인이 됩니다.
너무 낮은 값은 과속 또는 불안정한 원인이 됩니다.
모터 제어 형식 Ctt (p.55)가 PErF로 설정된 경우만 보입니다.
주파수주파수주파수주파수 루프루프루프루프 획득획득획득획득 0 to 100% 20% FLG
FLG 파라미터는 기계가 동작하는 관성에 따라 속도가 증가하는 기울기를 조절합니다.
너무 높은 값은 과속 또는 불안정한 원인이 됩니다.
너무 낮은 값은 너무 높은 값은 반응 시간을 연장하는 원인이 됩니다.
모터 제어 형식 Ctt (p.55)가 PErF로 설정된 경우만 보입니다.
동작 또는 정지 시에 수정이 가능한 파라미터

59
ConF 설정 모드 – 완성 메뉴(FULL)
코드 이름/설명 조정 범위 공장치
drC- 모터모터모터모터 제어제어제어제어 메뉴메뉴메뉴메뉴 ( ( ( (계속계속계속계속)))) 플럭스플럭스플럭스플럭스 프로필프로필프로필프로필 0 to 100% 20% PFL
0 주파수에서 자화 전류를 정격 자화 전류의 %로 정의합니다.
PUMP law 의 조정
모터 제어 형식 Ctt (p.55)가 PUMP로 설정된 경우만 보입니다.
스위칭스위칭스위칭스위칭 주파수주파수주파수주파수 2 to 16 kHz 4 kHz SFr
스위칭 주파수 설정.
과열 상태에서, 인버터는 스위칭 주파수를 자동으로 감소합니다.
온도가 정상 상태로 되돌아 올 때, 최초 값으로 재저장됩니다.
CAUTIONCAUTIONCAUTIONCAUTION
손상된손상된손상된손상된 모터의모터의모터의모터의 위험성위험성위험성위험성 ATV12M2 용량에서, 필터들이 연결되지 않은 경우, 인버터의 스위칭 주파수가 4 kHz를 넘어
서는 안됩니다.
이러한이러한이러한이러한 사용법들의사용법들의사용법들의사용법들의 이행이행이행이행 실패는실패는실패는실패는, , , , 기계적기계적기계적기계적 손실이손실이손실이손실이 있을있을있을있을 수수수수 있습니다있습니다있습니다있습니다....
스위칭스위칭스위칭스위칭 주파수주파수주파수주파수 형식형식형식형식 HF1 SFt
HF1
HF2
모터 스위칭 주파수는 인버터 내부 온도가 너무 높을 때 항상 수정(감소)됩니다.
HF1: 열 최적화
모터 주파수에 따라 스위칭 주파수를 시스템에 적용시킬 수 있습니다.
HF2: 모터 소음 최적화 (높은 스위칭 주파수)
모터 주파수(rFr)가 무엇이든, 스위칭 주파수를 선택하여 일정 상태를 유지할 수 있습니다.
과열 상태에서, 인버터는 스위칭 주파수를 자동으로 감소합니다.
온도가 정상 상태로 되돌아 올 때, 최초 값으로 재저장됩니다.
모터모터모터모터 소음소음소음소음 감소감소감소감소 nO Nrd
nO
YES
소음은 들리는 소음. 환경에 따라 모터 소음은 조정 가능해야만 합니다. 임의의 주파수 변조는
고정 주파수에서 발생할 수 있는 공진 소음을 피할 수 있습니다.
No
Yes
동작 또는 정지 시에 수정이 가능한 파라미터
60
ConF 설정 모드 – 완성 메뉴(FULL)
코드 이름/설명 조정 범위 공장치
drC- 모터모터모터모터 제어제어제어제어 메뉴메뉴메뉴메뉴 ( ( ( (계속계속계속계속)))) 오토오토오토오토 튜닝튜닝튜닝튜닝 nO tUn
nO
YES
dOnE
DANGERDANGERDANGERDANGER
감전감전감전감전, , , , 폭발폭발폭발폭발, , , , 그리고그리고그리고그리고 아크아크아크아크 플플플플래시래시래시래시 의의의의 위험위험위험위험
오토 튜닝 중에, 모터는 정격 전류에서 동작합니다.
오토 튜닝 중에, 모터를 동작하지 않습니다.
이러한이러한이러한이러한 사용법들의사용법들의사용법들의사용법들의 이행이행이행이행 실패는실패는실패는실패는, , , , 사망사망사망사망 또는또는또는또는 심각한심각한심각한심각한 부상을부상을부상을부상을 입을입을입을입을 수수수수 있습니다있습니다있습니다있습니다....
WARNING WARNING WARNING WARNING 제어제어제어제어 실패실패실패실패 다음의 파라미터들은, (p.55)에 묘사, 오토 튜닝을 시작하기 전에 정확하게 설정되어야 합니다:
UnS, FrS, nCr, nSP 와 nPr 또는 CoS.
하나 또는 여럿의 이들 파라미터를 오토 튜닝을 실행한 후, 수정을 한다면, tUn은 nO로 되돌아가
고, 이 과정을 다시 해야만 합니다.
이러한이러한이러한이러한 사용법들의사용법들의사용법들의사용법들의 이행이행이행이행 실패는실패는실패는실패는, , , , 사망사망사망사망, , , , 심각한심각한심각한심각한 부상부상부상부상 또는또는또는또는 기계적기계적기계적기계적 손실이손실이손실이손실이 있을있을있을있을 수수수수
있습니다있습니다있습니다있습니다....
No: 기준 모터의 공장 설정치
Yes: 오토 튜닝 시작
Done: 오토 튜닝이 실행되었음
Attention:Attention:Attention:Attention:
오토 튜닝은 모터가 연결되고 초기화 상태에서 실행되어야만 합니다.
모터 정격 전력 nPr(p.45)과 모터 정격 전류 nCr(p.55) 파라미터들은 일관되어야 합니다.
오토 튜닝은 정지 명령 없음이 활성화되어야만 실행됩니다. 자유 회전 정지 또는 빠른 정지
기능이 논리 입력으로 할당되었을 때, 이 입력은 1(활성 0)로 설정되어야만 합니다.
오토 튜닝은 어떠한 운전 또는 유동같이 오토 튜닝 순서 후에도 영향을 줄 수 있는 명령들
보다 우선 순위를 갖습니다.
오토 튜닝은 1초에서 2초 정도 걸릴 것입니다. 중단하지 않고, 표시가 dOnE 또는 nO로 변
할 때까지 기다립니다.
Note:Note:Note:Note: 오토 튜닝 중에, 모터는 정격 전류에서 동작합니다.
모터모터모터모터 파라미터파라미터파라미터파라미터 선택선택선택선택 nPr MPC
nPr
CoS
이 파라미터는 모터 파라미터(nPr 또는 CoS)가 설정되는 것을 선택할 수 있습니다.
모터 정격 전력 nPr(p.45)
모터 정격 cos phi CoS(p.55)
61
ConF 설정 모드 – 완성 메뉴(FULL)
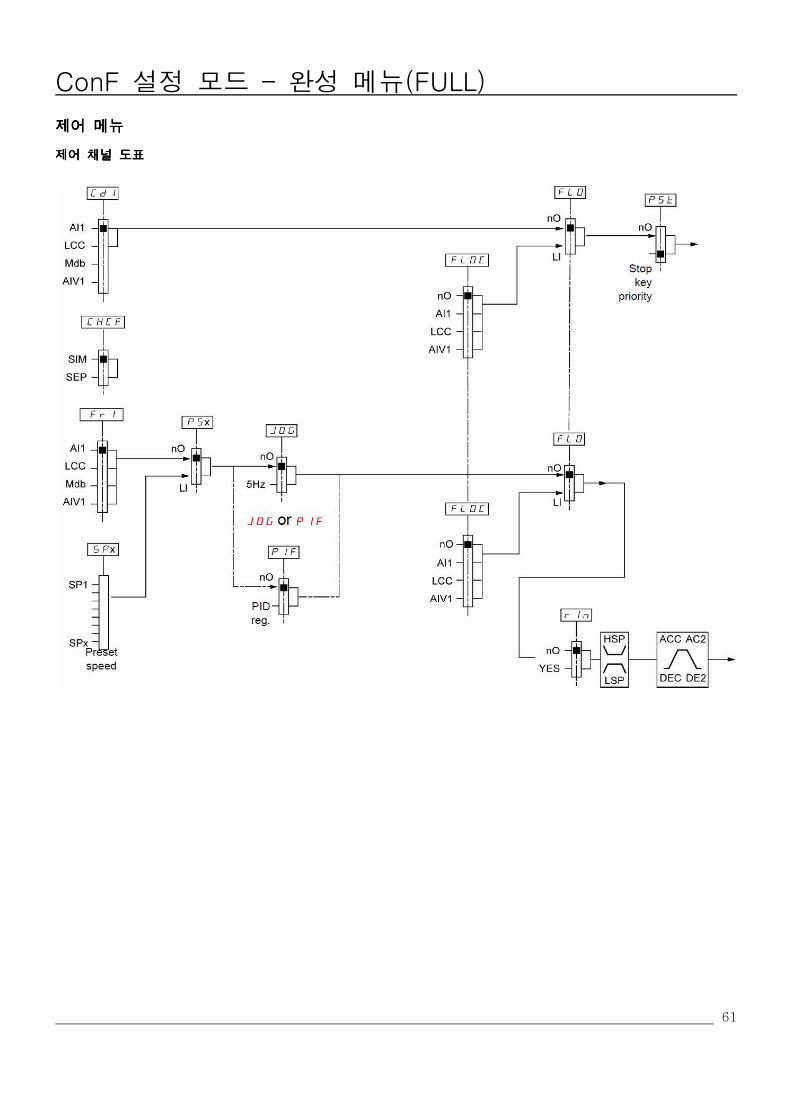
제어제어제어제어 메뉴메뉴메뉴메뉴
제어제어제어제어 채널채널채널채널 도표도표도표도표
62
ConF 설정 모드 – 완성 메뉴(FULL)
코드 이름/설명 조정 범위 공장치
CtL- 제어제어제어제어 메뉴메뉴메뉴메뉴
속도속도속도속도 지령지령지령지령 채널채널채널채널 1 1 1 1 AI1 Fr1
AI1
LCC
Mdb
AIU1
터미널
원격 표시
모드버스
내장 표시와 조그 다이얼
이 파라미터는 이미 “나의 메뉴”(p.44)에 포함되어 있습니다.
외부외부외부외부 참조참조참조참조 값값값값 -400 Hz to 400 Hz - LF
r 이 파라미터는 이미 “나의 메뉴”(p.44)에 포함되어 있습니다.
아날로그아날로그아날로그아날로그 입력입력입력입력 가상가상가상가상 0% to 100% AIU1
이 파라미터는 이미 “나의 메뉴”(p.44)에 포함되어 있습니다.
역방향역방향역방향역방향 금지금지금지금지 nO rIn
nO
YES
역방향으로 동작 금지는 논리 입력으로 요청된 방향에는 적용되지 않습니다.
- 역방향 요청은 논리 입력으로 수행됩니다.
- 역방향 요청은 표시되지 않습니다.
- 역방향 요청은 선으로 되지 않습니다.
- PID, 등으로부터의 어떠한 역방향 속도 참조도 0참조(0Hz)로 표기됩니다.
No
Yes
정지정지정지정지 키키키키 우선우선우선우선 YES PSt
nO
YES
이 파라미터는 인버터와 원격 표시에 있는 정지 버튼을 활성 또는 비활성할 수 있습니다.
정지 버튼 불이행은 실행 명령 채널이 인버터 키패드 또는 원격 표시와 다르면 실행됩니다.
WARNING WARNING WARNING WARNING 제어제어제어제어 실패실패실패실패 외관 정지 방법이 존재하지 않다면, “nO”로 선택하지 않습니다.
이러한이러한이러한이러한 사용법들의사용법들의사용법들의사용법들의 이행이행이행이행 실패는실패는실패는실패는, , , , 사망사망사망사망, , , , 심각한심각한심각한심각한 부상부상부상부상 또는또는또는또는 기계적기계적기계적기계적 손실이손실이손실이손실이 있을있을있을있을 수수수수
있습니다있습니다있습니다있습니다....
No: 정지 비활성
Yes: 정지 활성
이 기능은 앞문 커버나 추가 표시 커버에 “run”과 “stop”키들을 사용하기 위해 YES로 설정하
기를 권합니다.
채널채널채널채널 설정설정설정설정 SIM CHCF
SIM
SEP
채널 설정 CHCF를 선정:
- 비 분리 모드(명령과 참조가 같은 채널)
- 분리 모드(명령과 참조가 다른 채널)
비 분리 모드
분리 모드
이 파라미터의 할당은 “ENT”키를 2초간 눌러서, 변경합니다.
동작 또는 정지 시에 수정이 가능한 파라미터
63
ConF 설정 모드 – 완성 메뉴(FULL)
코드 이름/설명 조정 범위 공장치
CtL- 제어제어제어제어 메뉴메뉴메뉴메뉴 ( ( ( (계속계속계속계속))))
명령명령명령명령 채널채널채널채널 1 1 1 1 tEr Cd1
tEr
LOC
LCC
Mdb
채널 설정 CHCF를 선정:
터미널
로컬
원격 표시
모드버스
이 파라미터는 채널 설정 CHCF(p.60)가 분리로 설정되어야만 가능합니다.
강제강제강제강제 로컬로컬로컬로컬 할당할당할당할당 nO FLO
nO
L1H
-
L4H
기능 비활성
L1h to L4h:강제 로컬 모드가 입력이 1일 때 활성
강제강제강제강제 로컬로컬로컬로컬 참조참조참조참조 nO FLOC
nO
AI1
LCC
AIU1
강제 로컬 할당 FLO가 nO로 설정되지 않아야만 보여집니다.
할당 없음
터미널
원격 표시
내장 표시와 조그 다이얼
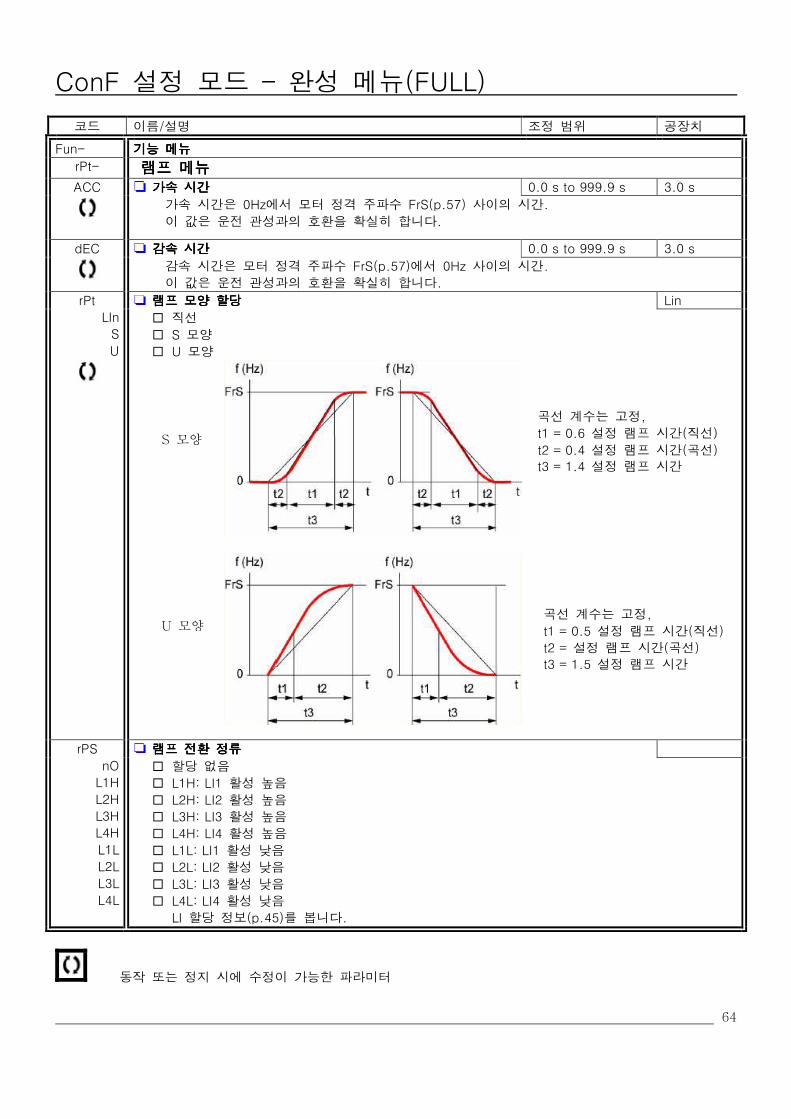
64
ConF 설정 모드 – 완성 메뉴(FULL)
코드 이름/설명 조정 범위 공장치
Fun- 기능기능기능기능 메뉴메뉴메뉴메뉴
rPt- 램프램프램프램프 메뉴메뉴메뉴메뉴 가속가속가속가속 시간시간시간시간 0.0 s to 999.9 s 3.0 s ACC
가속 시간은 0Hz에서 모터 정격 주파수 FrS(p.57) 사이의 시간.
이 값은 운전 관성과의 호환을 확실히 합니다.
감속감속감속감속 시간시간시간시간 0.0 s to 999.9 s 3.0 s dEC
감속 시간은 모터 정격 주파수 FrS(p.57)에서 0Hz 사이의 시간.
이 값은 운전 관성과의 호환을 확실히 합니다.
램프램프램프램프 모양모양모양모양 할당할당할당할당 Lin rPt
LIn
S
U
직선
S 모양
U 모양
램프램프램프램프 전환전환전환전환 정류정류정류정류 rPS
nO
L1H
L2H
L3H
L4H
L1L
L2L
L3L
L4L
할당 없음
L1H: LI1 활성 높음
L2H: LI2 활성 높음
L3H: LI3 활성 높음
L4H: LI4 활성 높음
L1L: LI1 활성 낮음
L2L: LI2 활성 낮음
L3L: LI3 활성 낮음
L4L: LI4 활성 낮음
LI 할당 정보(p.45)를 봅니다.
동작 또는 정지 시에 수정이 가능한 파라미터
S 모양
곡선 계수는 고정,
t1 = 0.6 설정 램프 시간(직선)
t2 = 0.4 설정 램프 시간(곡선)
t3 = 1.4 설정 램프 시간
U 모양 곡선 계수는 고정,
t1 = 0.5 설정 램프 시간(직선)
t2 = 설정 램프 시간(곡선)
t3 = 1.5 설정 램프 시간
65
ConF 설정 모드 – 완성 메뉴(FULL)
코드 이름/설명 조정 범위 공장치
Fun- 기능기능기능기능 메뉴메뉴메뉴메뉴 ( ( ( (계속계속계속계속))))
rPt- 램프램프램프램프 메뉴메뉴메뉴메뉴 ((((계속계속계속계속)))) 가속가속가속가속 시간시간시간시간 2 2 2 2 0.0 s to 999.9 s 5.0 s AC2
램프 전환 정류 rPS(p.62)가 nO로 설정되지 않아야만 보여집니다.
두번째 가속 램프 시간은, 0.0에서 999.9초로 조정 가능.
이 램프는 시작과 시동을 위한 PID가 사용될 때 램프가 활성화 될 것이고, PID 시동 레벨
(p.73)에서 봅니다.
감속감속감속감속 시간시간시간시간 2 2 2 2 0.0 s to 999.9 s 5.0 s dE2
램프 전환 정류 rPS(p.62)가 nO로 설정되지 않아야만 보여집니다.
두번째 감속 램프 시간은, 0.0에서 999.9초로 조정 가능.
감속감속감속감속 램프램프램프램프 할당할당할당할당 적용적용적용적용 YES brA
nO
YES
dYnA
기능 비활성. 인버터가 일반 감속 조정에 의해 감속할 것입니다. 이 설정은 추가 동적 제동을
사용한다면, 호환이 되도록 합니다.
이 기능은 정지하거나 부하의 높은 관성에 의해 속도가 줄어들 때, DC bus의 과전압 또는 과
제동으로부터 보호하는데 도움을 주도록 감속 시간을 자동적으로 증가합니다.
모터 제동: 이 모드는 인버터가 동적 제종 저항을 사용하지 않고도 최대한 빠른 정지가 가능
하도록 합니다. 이는 재생 에너지로부터의 모터 손실을 분산시키는데 사용합니다. 이 기능은
위치에 따라 호환되지 않을 수 있습니다. 이 기능은 추가 제동 저항과 모듈이 사용될 때는 사
용하지 않도록 합니다.
Attention:Attention:Attention:Attention: 제동 저항 사용시 brA는 nO로 설정.
동작 또는 정지 시에 수정이 가능한 파라미터
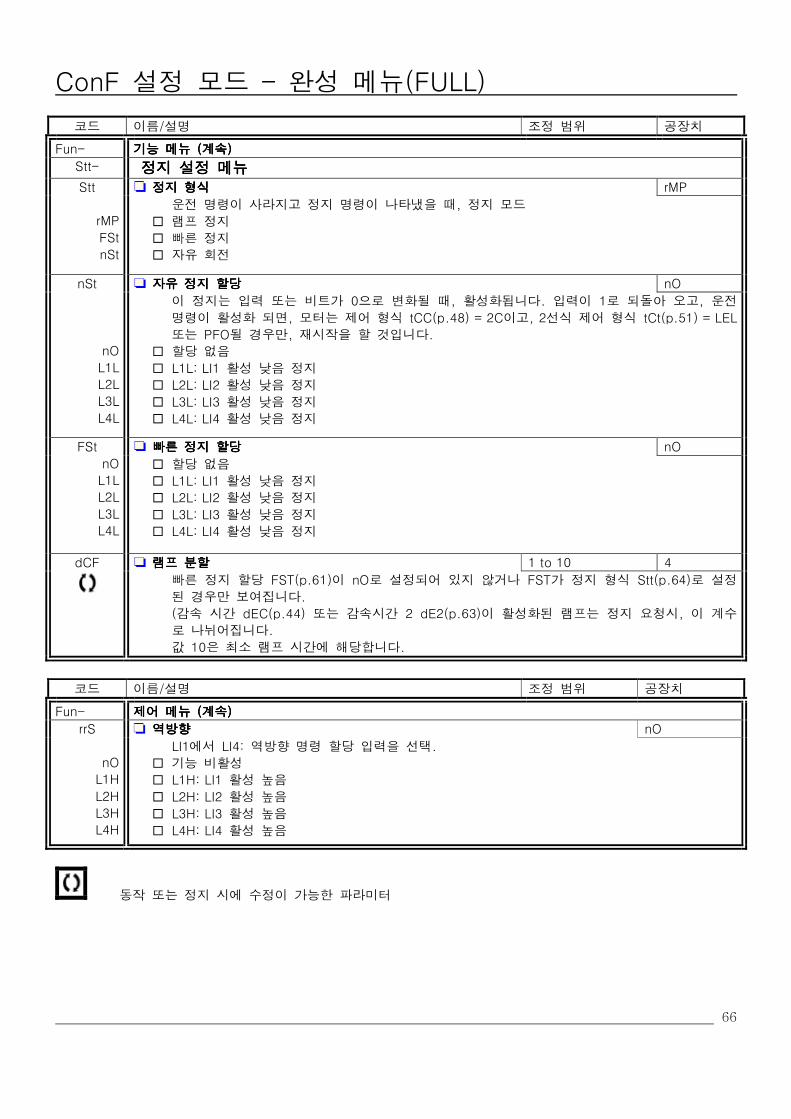
66
ConF 설정 모드 – 완성 메뉴(FULL)
코드 이름/설명 조정 범위 공장치
Fun- 기능기능기능기능 메뉴메뉴메뉴메뉴 ( ( ( (계속계속계속계속))))
Stt- 정지정지정지정지 설정설정설정설정 메뉴메뉴메뉴메뉴 정지정지정지정지 형식형식형식형식 rMP Stt
rMP
FSt
nSt
운전 명령이 사라지고 정지 명령이 나타냈을 때, 정지 모드
램프 정지
빠른 정지
자유 회전
자유자유자유자유 정지정지정지정지 할당할당할당할당 nO nSt
nO
L1L
L2L
L3L
L4L
이 정지는 입력 또는 비트가 0으로 변화될 때, 활성화됩니다. 입력이 1로 되돌아 오고, 운전
명령이 활성화 되면, 모터는 제어 형식 tCC(p.48) = 2C이고, 2선식 제어 형식 tCt(p.51) = LEL
또는 PFO될 경우만, 재시작을 할 것입니다.
할당 없음
L1L: LI1 활성 낮음 정지
L2L: LI2 활성 낮음 정지
L3L: LI3 활성 낮음 정지
L4L: LI4 활성 낮음 정지
빠른빠른빠른빠른 정지정지정지정지 할당할당할당할당 nO FSt
nO
L1L
L2L
L3L
L4L
할당 없음
L1L: LI1 활성 낮음 정지
L2L: LI2 활성 낮음 정지
L3L: LI3 활성 낮음 정지
L4L: LI4 활성 낮음 정지
램프램프램프램프 분할분할분할분할 1 to 10 4 dCF
빠른 정지 할당 FST(p.61)이 nO로 설정되어 있지 않거나 FST가 정지 형식 Stt(p.64)로 설정
된 경우만 보여집니다.
(감속 시간 dEC(p.44) 또는 감속시간 2 dE2(p.63)이 활성화된 램프는 정지 요청시, 이 계수
로 나뉘어집니다.
값 10은 최소 램프 시간에 해당합니다.
코드 이름/설명 조정 범위 공장치
Fun- 제어제어제어제어 메뉴메뉴메뉴메뉴 ( ( ( (계속계속계속계속))))
역방향역방향역방향역방향 nO rrS
nO
L1H
L2H
L3H
L4H
LI1에서 LI4: 역방향 명령 할당 입력을 선택.
기능 비활성
L1H: LI1 활성 높음
L2H: LI2 활성 높음
L3H: LI3 활성 높음
L4H: LI4 활성 높음
동작 또는 정지 시에 수정이 가능한 파라미터

67
ConF 설정 모드 – 완성 메뉴(FULL)
코드 이름/설명 조정 범위 공장치
Fun- 기능기능기능기능 메뉴메뉴메뉴메뉴 ( ( ( (계속계속계속계속))))
AdC- 자동자동자동자동 DC DC DC DC 인가인가인가인가 메뉴메뉴메뉴메뉴 자동자동자동자동 DC DC DC DC 인가인가인가인가 YES AdC
nO
YES
Ct
DANGERDANGERDANGERDANGER
감전감전감전감전, , , , 폭발폭발폭발폭발, , , , 그리고그리고그리고그리고 아크아크아크아크 플래시플래시플래시플래시 의의의의 위험위험위험위험 AdC = Ct일 때, 전류 인가는 운전 명령이 보내지지 않는다해도 실행됩니다.
이 활성은 어떤 방식으로도 사람이나 장비를 위헙하게하지 않는다는 것을 확인합니다.
이러한이러한이러한이러한 사용법들의사용법들의사용법들의사용법들의 이행이행이행이행 실패는실패는실패는실패는, , , , 사망사망사망사망 또는또는또는또는 심각한심각한심각한심각한 부상을부상을부상을부상을 입을입을입을입을 수수수수 있습니다있습니다있습니다있습니다....
WARNING WARNING WARNING WARNING 잠금잠금잠금잠금 토크토크토크토크 없음없음없음없음 DC 인가 브레이크는 영 속도에서 어떠한 잠금 토크도 제공하지 않습니다.
DC 인가 브레이크는 전원을 잃는다거나, 인버터가 오류를 감지했을 때 동작하지 않습니다.
필요한 곳에, 별도의 브레이크를 토크 수준을 유지하기 위해 사용합니다.
이러한이러한이러한이러한 사용법들의사용법들의사용법들의사용법들의 이행이행이행이행 실패는실패는실패는실패는, , , , 사망사망사망사망, , , , 심각한심각한심각한심각한 부상부상부상부상 또는또는또는또는 기계적기계적기계적기계적 손실이손실이손실이손실이 있을있을있을있을 수수수수
있습니다있습니다있습니다있습니다....
기능 비활성, DC 인가 전류 없음
DC 인가 시간 제한
DC 인가 계속
자동자동자동자동 DC DC DC DC 인가인가인가인가 전류전류전류전류 0 to 120% of nCr 70% SdCI
CAUTIONCAUTIONCAUTIONCAUTION 모터모터모터모터 손상손상손상손상 위험위험위험위험 모터가 과열없이 이 전류를 견뎌낼수 있는지 점검합니다.
이러한이러한이러한이러한 사용법들의사용법들의사용법들의사용법들의 이행이행이행이행 실패는실패는실패는실패는, , , , 부상부상부상부상 또는또는또는또는 기계적기계적기계적기계적 손실이손실이손실이손실이 있을있을있을있을 수수수수 있습니다있습니다있습니다있습니다....
자동 DC 인가 AdC가 nO로 설정되어야만 보여집니다.
정지시 인가 전류와 지속적인 DC 인가.
자동자동자동자동 DC DC DC DC 인가인가인가인가 시간시간시간시간 0.1 to 30 s 0.5 s tdCI
CAUTIONCAUTIONCAUTIONCAUTION 모터모터모터모터 손상손상손상손상 위험위험위험위험 장시간 DC 인가 브레이크은 과열과 모터 손상의 원인이 될 수 있습니다.
장시간 DC 인가 브레이크를 피해서 모터를 보호합니다.
이러한이러한이러한이러한 사용법들의사용법들의사용법들의사용법들의 이행이행이행이행 실패는실패는실패는실패는, , , , 부상부상부상부상 또는또는또는또는 기계적기계적기계적기계적 손실이손실이손실이손실이 있을있을있을있을 수수수수 있습니다있습니다있습니다있습니다....
자동 DC 인가 AdC가 nO로 설정되어야만 보여집니다.
정지시 인가 시간.
동작 또는 정지 시에 수정이 가능한 파라미터
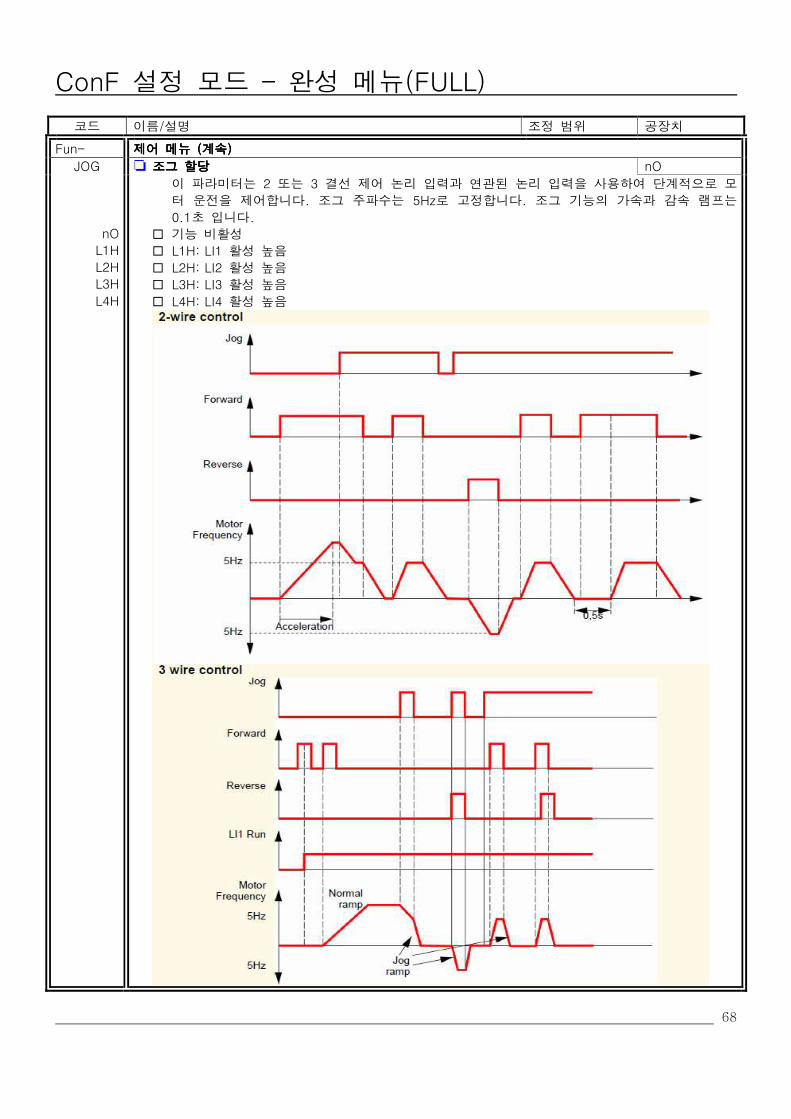
68
ConF 설정 모드 – 완성 메뉴(FULL)
코드 이름/설명 조정 범위 공장치
Fun- 제어제어제어제어 메뉴메뉴메뉴메뉴 ( ( ( (계속계속계속계속))))
조그조그조그조그 할당할당할당할당 nO JOG
nO
L1H
L2H
L3H
L4H
이 파라미터는 2 또는 3 결선 제어 논리 입력과 연관된 논리 입력을 사용하여 단계적으로 모
터 운전을 제어합니다. 조그 주파수는 5Hz로 고정합니다. 조그 기능의 가속과 감속 램프는
0.1초 입니다.
기능 비활성
L1H: LI1 활성 높음
L2H: LI2 활성 높음
L3H: LI3 활성 높음
L4H: LI4 활성 높음

69
ConF 설정 모드 – 완성 메뉴(FULL)
다단다단다단다단 속도속도속도속도 2, 4 또는 8 속도들을 1, 2 또는 3 논리 입력 각각으로 사전 설정할 수 있습니다.
다단다단다단다단 속도속도속도속도 입력입력입력입력 조합표조합표조합표조합표
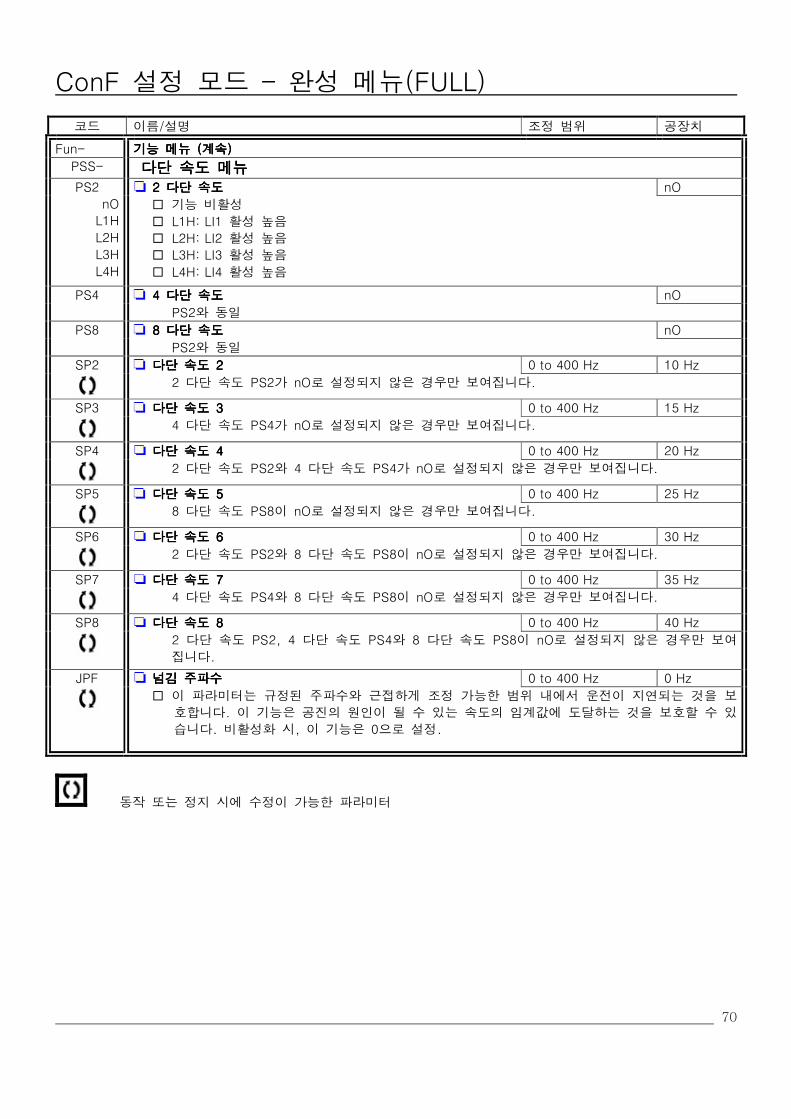
70
ConF 설정 모드 – 완성 메뉴(FULL)
코드 이름/설명 조정 범위 공장치
Fun- 기능기능기능기능 메뉴메뉴메뉴메뉴 ( ( ( (계속계속계속계속))))
PSS- 다단다단다단다단 속도속도속도속도 메뉴메뉴메뉴메뉴 2 2 2 2 다단다단다단다단 속도속도속도속도 nO PS2
nO
L1H
L2H
L3H
L4H
기능 비활성
L1H: LI1 활성 높음
L2H: LI2 활성 높음
L3H: LI3 활성 높음
L4H: LI4 활성 높음
4 4 4 4 다단다단다단다단 속도속도속도속도 nO PS4
PS2와 동일
8 8 8 8 다단다단다단다단 속도속도속도속도 nO PS8
PS2와 동일
다다다다단단단단 속도속도속도속도 2 2 2 2 0 to 400 Hz 10 Hz SP2
2 다단 속도 PS2가 nO로 설정되지 않은 경우만 보여집니다.
다단다단다단다단 속도속도속도속도 3 3 3 3 0 to 400 Hz 15 Hz SP3
4 다단 속도 PS4가 nO로 설정되지 않은 경우만 보여집니다.
다단다단다단다단 속도속도속도속도 4 4 4 4 0 to 400 Hz 20 Hz SP4
2 다단 속도 PS2와 4 다단 속도 PS4가 nO로 설정되지 않은 경우만 보여집니다.
다단다단다단다단 속도속도속도속도 5 5 5 5 0 to 400 Hz 25 Hz SP5
8 다단 속도 PS8이 nO로 설정되지 않은 경우만 보여집니다.
다단다단다단다단 속도속도속도속도 6 6 6 6 0 to 400 Hz 30 Hz SP6
2 다단 속도 PS2와 8 다단 속도 PS8이 nO로 설정되지 않은 경우만 보여집니다.
다단다단다단다단 속도속도속도속도 7 7 7 7 0 to 400 Hz 35 Hz SP7
4 다단 속도 PS4와 8 다단 속도 PS8이 nO로 설정되지 않은 경우만 보여집니다.
다단다단다단다단 속도속도속도속도 8 8 8 8 0 to 400 Hz 40 Hz SP8
2 다단 속도 PS2, 4 다단 속도 PS4와 8 다단 속도 PS8이 nO로 설정되지 않은 경우만 보여
집니다.
넘김넘김넘김넘김 주파수주파수주파수주파수 0 to 400 Hz 0 Hz JPF
이 파라미터는 규정된 주파수와 근접하게 조정 가능한 범위 내에서 운전이 지연되는 것을 보
호합니다. 이 기능은 공진의 원인이 될 수 있는 속도의 임계값에 도달하는 것을 보호할 수 있
습니다. 비활성화 시, 이 기능은 0으로 설정.
동작 또는 정지 시에 수정이 가능한 파라미터
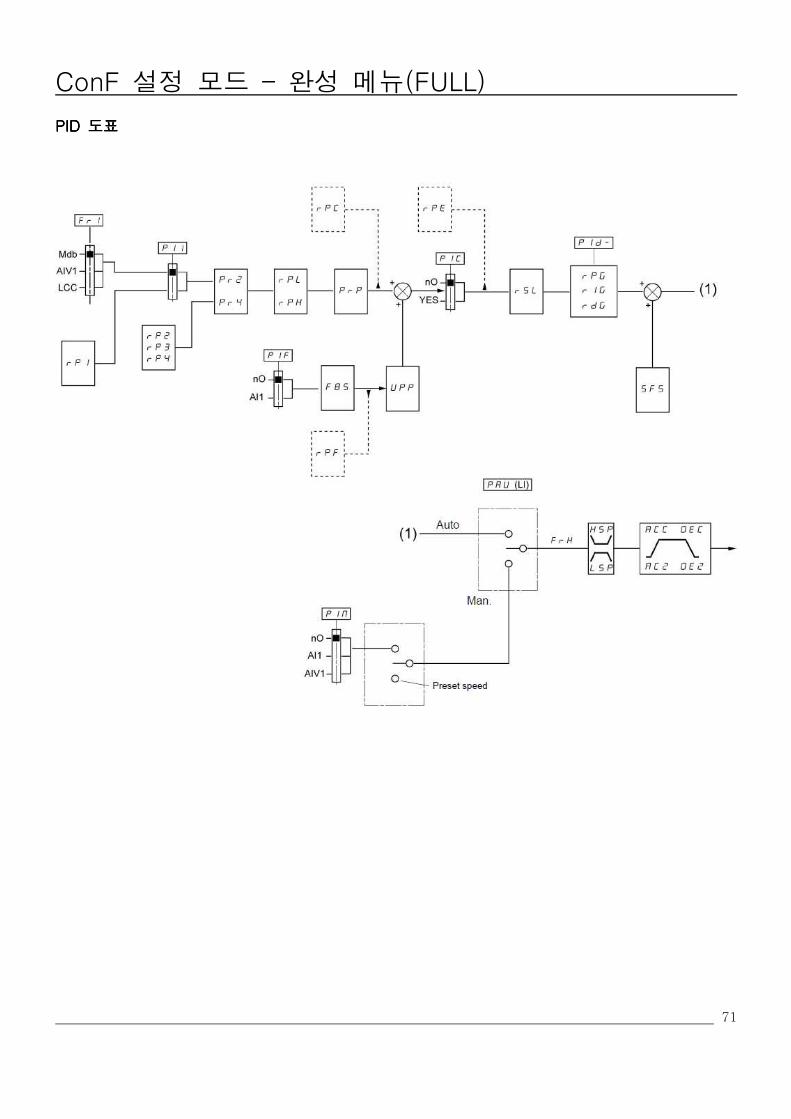
71
ConF 설정 모드 – 완성 메뉴(FULL)
PID PID PID PID 도표도표도표도표

72
ConF 설정 모드 – 완성 메뉴(FULL)
코드 이름/설명 조정 범위 공장치
Fun- 기능기능기능기능 메뉴메뉴메뉴메뉴 ( ( ( (계속계속계속계속))))
PId- PIDPIDPIDPID 메뉴메뉴메뉴메뉴 PID PID PID PID 피드백피드백피드백피드백 할당할당할당할당 nO PIF
nO
AI1 기능 비활성
터미널. Fr1이 AI1으로 설정된 경우, 선택 불가
PID PID PID PID 비례비례비례비례 이득이득이득이득 0.01 to 100 1 rPG
PID 피드백 할당 PIF가 nO로 설정되지 않은 경우만 보여집니다.
PID PID PID PID 적분적분적분적분 이득이득이득이득 0.01 to 100 1 rIG
PID 피드백 할당 PIF가 nO로 설정되지 않은 경우만 보여집니다.
PID PID PID PID 미분미분미분미분 이득이득이득이득 0.01 to 100 0.00 rdG
PID 피드백 할당 PIF가 nO로 설정되지 않은 경우만 보여집니다.
PID PID PID PID 피드백피드백피드백피드백 용량용량용량용량 단위단위단위단위 0.01 to 100 1.0 FbS
이 파라미터는 과정 범위와 피드백 범위 사이의 관계를 제공합니다.
PID 피드백 할당 PIF가 nO로 설정되지 않은 경우만 보여집니다.
내부내부내부내부 PID PID PID PID 참조참조참조참조 활성활성활성활성 nO PII
nO
YES
PID 피드백 할당 PIF가 nO로 설정되지 않은 경우만 보여집니다.
No
Yes
2222단단단단 PID PID PID PID 할당할당할당할당 nO Pr2
nO
L1H
L2H
L3H
L4H
PID 피드백 할당 PIF가 nO로 설정되지 않은 경우만 보여집니다.
No
L1h
L2h
L3h
L4h
동작 또는 정지 시에 수정이 가능한 파라미터

73
ConF 설정 모드 – 완성 메뉴(FULL)
코드 이름/설명 조정 범위 공장치
Fun- 기능기능기능기능 메뉴메뉴메뉴메뉴 ( ( ( (계속계속계속계속))))
PId- PID PID PID PID 메뉴메뉴메뉴메뉴 ( ( ( (계속계속계속계속)))) 4 4 4 4 다단다단다단다단 PID PID PID PID 할당할당할당할당 nO Pr4
nO
L1H
L2H
L3H
L4H
PID 피드백 할당이 PIF(p.72)가 nO로 설정되지 않은 경우만 보여집니다.
No
L1h
L2h
L3h
L4h
2단 PID 할당 Pr2(p.70)은 4단 PID 할당 Pr4가 할당되기 전에 할당되어야만 합니다.
다단다단다단다단 PID PID PID PID 참조참조참조참조 2 2 2 2 0 to 100% 25% rP2
PID 피드백 할당 PIF(p.72)와 2단 PID 할당 Pr2(p.70)이 nO로 설정되지 않은 경우만 보여집
니다.
다단다단다단다단 PID PID PID PID 참조참조참조참조 3 3 3 3 0 to 100% 50% rP3
PID 피드백 할당 PIF(p.72)와 4단 PID 할당 Pr42(p.70)이 nO로 설정되지 않은 경우만 보여집
니다.
다단다단다단다단 PID PID PID PID 참조참조참조참조4444 0 to 100% 75% rP4
PID 피드백 할당 PIF(p.72), 2단 PID 할당 Pr2(p.70) 와 4단 PID 할당 Pr42(p.70)이 nO로 설
정되지 않은 경우만 보여집니다.
내부내부내부내부 PID PID PID PID 참조참조참조참조 0 to 100% 0% rPI
PID 피드백 할당 PIF(p.72)가 nO로 설정되지 않고, 내부 PID 참조 활성 PII(p.70)가 YES로
설정 되어있거나, 참조 채널 1 Fr1(p.44)가 LCC로 설정되어 있는 경우에만 보여집니다.
PID PID PID PID 참조참조참조참조 램프램프램프램프 0 to 100% 0% PrP
PID 피드백 할당 PIF(p.72)가 nO로 설정되지 않은 경우만 보여집니다.
PID PID PID PID 최저최저최저최저 값값값값 참조참조참조참조 0 to 100% 0% rPL
PID 피드백 할당 PIF(p.72)가 nO로 설정되지 않은 경우만 보여집니다.
PID PID PID PID 최최최최대대대대 값값값값 참조참조참조참조 0 to 100% 100% rPH
PID 피드백 할당 PIF(p.72)가 nO로 설정되지 않은 경우만 보여집니다.
PID PID PID PID 예상예상예상예상 속도속도속도속도 0 to 400 Hz nO SFS
이 파라미터는 소도 참조 설정을 직접적으로 할 수 있습니다.
PID 피드백 할당 PIF(p.72)가 nO로 설정되지 않은 경우만 보여집니다.
동작 또는 정지 시에 수정이 가능한 파라미터

74
ConF 설정 모드 – 완성 메뉴(FULL)
코드 이름/설명 조정 범위 공장치
Fun- 기능기능기능기능 메뉴메뉴메뉴메뉴 ( ( ( (계속계속계속계속))))
PId- PID PID PID PID 메뉴메뉴메뉴메뉴 ( ( ( (계속계속계속계속)))) 가속가속가속가속 시간시간시간시간 2 2 2 2 0,0 to 999.9s 5.0s AC2
이 파라미터는 시스템이 시작되었을 때에만 활성화됩니다.
두번째 가속 램프 시간, 0.1에서 999.9초로 설정 가능.
0에서 정격 모터 주파수 FrS(p.57)까지의 가속 시간. 이 값은 관성에 의한 운전에 적합하다는 것
을 확실히 합니다.
PID 피드백 할당 PIF(p.72)와 PID 예상 속도 SFS(p.71)이 nO로 설정되지 않은 경우에만 보여집
니다.
PID PID PID PID 역역역역 수정수정수정수정 nO PIC
nO
YES
이 파라미터는 PID 시스템의 내부 오류 값을 되돌려줄 것입니다.
No
Yes
PID 피드백 할당 PIF(p.72)가 nO로 설정되지 않은 경우만 보여집니다.
PID PID PID PID 자동자동자동자동////수동수동수동수동 할당할당할당할당 nO PRU
nO
L1H
L2H
L3H
L4H
입력 0 상태, PID 활성
입력 1 상태, 수동 운전 활성
기능 비활성
L1H: LI1 활성 높음
L2H: LI2 활성 높음
L3H: LI3 활성 높음
L4H: LI4 활성 높음
PID 피드백 할당 PIF(p.72)가 nO로 설정되지 않은 경우만 보여집니다.
PID PID PID PID 미분미분미분미분 이득이득이득이득 nO PIM
nO
AI1
AIU1
이 파라미터는 PID를 비활성하고, 기준 수동 시스템으로 운전을 시킵니다.
No
터미널
AIVI
PID 피드백 할당 PIF(p.72)와 PID 자동/수동 할당 PAU(p.72)가 nO로 설정되지 않은 경우에만
보여집니다.
저속저속저속저속 운전운전운전운전 시간시간시간시간 0,0 to 999.9s nO tLS
정해진 기간의 저속 LSP(p.75)에서 운전함에 따라, 모터 정지를 자동으로 요구됩니다. 모터는
주파수 참조가 저속 LSP보다 크고, 운전 명령이 지속적이면, 재 시작한다.
중요: nO 값은 무제한 기간과 일치
PID 피드백 할당 PIF(p.72)가 nO로 설정되지 않은 경우만 보여집니다.
동작 또는 정지 시에 수정이 가능한 파라미터
75
ConF 설정 모드 – 완성 메뉴(FULL)
코드 이름/설명 조정 범위 공장치
Fun- 기능기능기능기능 메뉴메뉴메뉴메뉴 ( ( ( (계속계속계속계속))))
PId- PID PID PID PID 메뉴메뉴메뉴메뉴 ( ( ( (계속계속계속계속) ) ) ) PID PID PID PID 웨이크웨이크웨이크웨이크----업업업업 레벨레벨레벨레벨 0 to 100% 0% rSL
DANGERDANGERDANGERDANGER 의도하지의도하지의도하지의도하지 않은않은않은않은 장비장비장비장비 운전운전운전운전 의도하지 않은 재시작이 어떠한 위험에도 발생하지 않을 것인지 점검
이러한이러한이러한이러한 사용법들의사용법들의사용법들의사용법들의 이행이행이행이행 실패는실패는실패는실패는, , , , 사망사망사망사망 또는또는또는또는 심각한심각한심각한심각한 부상을부상을부상을부상을 입을입을입을입을 수수수수 있습니다있습니다있습니다있습니다....
PID 기능들과 저속 운전 시간 tLS가 동시에 설정 된다면, PID 조정기는 속도 설정을 LSP보다
낮게 할 것이고, 결과적으로 불필요한 동작을 시작하거나, LSP로 운전, 정지 등...
파라미터 PID 웨이크-업 레벨 rSL은, PID 오류 임계값을 LSP에서 장시간 정지 후에 재 시작하
기 위해 최소값으로 사용된다.
PID 피드백 할당 PIF(p.72)와 저속 운전 시간 tLS(p.74)가 nO로 설정되지 않은 경우만 보여집
니다.
웨이크웨이크웨이크웨이크----업업업업 임계값임계값임계값임계값 0 to 100% 0% UPP
DANGERDANGERDANGERDANGER 의도하지의도하지의도하지의도하지 않은않은않은않은 장비장비장비장비 운전운전운전운전 의도하지 않은 재시작이 어떠한 경우에도 사람이나 장비에 위험하지 않는다는 것을 점검
이러한이러한이러한이러한 사용법들의사용법들의사용법들의사용법들의 이행이행이행이행 실패는실패는실패는실패는, , , , 사망사망사망사망 또는또는또는또는 심각한심각한심각한심각한 부상을부상을부상을부상을 입을입을입을입을 수수수수 있습니다있습니다있습니다있습니다....
PID 역 수정 PIC(p.72)가 nO로 설정되면, PID 피드백 임계값이 PID 조정기가 재활성(웨이크-
업)을 넘어서는 설정을 활성화하고, 저속으로 tLS 최대 시간을 초과함으로써, 정지한다.
PIC가 YES로 설정되면, PID 피드백 임계값이 PID 조정기가 재활성(웨이크-업) 이상으로 설정을
활성화하고, 저속으로 tLS 최대 시간을 초과함으로써, 정지한다.
PID 피드백 할당 PIF(p.72)와 저속 운전 시간 tLS(p.74)가 nO로 설정되지 않은 경우만 보여집
니다.
정지정지정지정지 임계값임계값임계값임계값 오프셋오프셋오프셋오프셋 0 to HSP 1 Hz SLE
조정 가능한 재시작 임계값(오프셋)은 최저 속도 LSP + 정지 임계값 오프셋 SLE (Hz)에서 장시
간 운전 후에 정지한다. 모터 재시작은 참조값이 (LSP + SLE)보다 높고 운전 명령이 여전히 존
재할 때 올라간다.
저속 운전 시간 tLS(p.74)가 nO로 설정되지 않고, PID 피드백 할당 PIF(p.72)가 nO로 설정되지
않은 경우만 보여집니다.
동작 또는 정지 시에 수정이 가능한 파라미터
76
ConF 설정 모드 – 완성 메뉴(FULL)
코드 이름/설명 조정 범위 공장치
Fun- 기기기기능능능능 메뉴메뉴메뉴메뉴 ( ( ( (계속계속계속계속))))
PId- PID PID PID PID 메뉴메뉴메뉴메뉴 ((((계속계속계속계속)))) PI PI PI PI 피드백피드백피드백피드백 감독감독감독감독 임계값임계값임계값임계값 nO to 100% nO LPI
알람은 릴레이 또는 논리 출력으로 할당할 수 있습니다.
조정 범위:
No: 기능 비활성(다른 기능 파라미터들에 접근하는 것이 불가능 할 것입니다.)
최소와 최대 PID 피드백 사이
PID 피드백 할당 PIF(p.72)가 nO로 설정되지 않은 경우만 보여집니다.
PI PI PI PI 피드백피드백피드백피드백 감독감독감독감독 기능기능기능기능 시간시간시간시간 지연지연지연지연 0 to 600 s 0 s tPI
상단의 PID 피드백 감독 임계값 LPI가 nO로 설정되지 않은 경우만 보여집니다.
최대최대최대최대 주파수주파수주파수주파수 감지감지감지감지 히스테리시스히스테리시스히스테리시스히스테리시스 0 to HSP 0 Hz APO
상단의 PID 피드백 감독 임계값 LPI가 nO로 설정되지 않은 경우만 보여집니다.
PI PI PI PI 피드백피드백피드백피드백 감독감독감독감독 YES MPI
PI 피드백 감독 기능을 위한 대체 형식
YES: 자유 회전 정지
LFF: 대체 속도 LFF를 오류가 존재하고 운전 명령이 비활성되지 않는 동안 전환
상단의 PID 피드백 감독 임계값 LPI가 nO로 설정되지 않은 경우만 보여집니다.
대체대체대체대체 속도속도속도속도 0 to HSP 0 Hz LFF
PID 조정 피드백 감독 오류를 위한 대체 속도
동작 또는 정지 시에 수정이 가능한 파라미터
77
ConF 설정 모드 – 완성 메뉴(FULL)
코드 이름/설명 조정 범위 공장치
Fun- 기능기능기능기능 메뉴메뉴메뉴메뉴 ( ( ( (계속계속계속계속))))
PId- PID PID PID PID 메뉴메뉴메뉴메뉴 ((((계속계속계속계속)))) PMP- 펌프펌프펌프펌프 예하예하예하예하----메뉴메뉴메뉴메뉴
어플리어플리어플리어플리케이션케이션케이션케이션 과부하과부하과부하과부하 시간시간시간시간 지연지연지연지연 0 to 100 s 0 s tOL
보기(p.54)
PID 피드백 할당 PIF(p.72)가 nO로 설정되지 않은 경우만 보여집니다.
어플리케이션어플리케이션어플리케이션어플리케이션 과부하과부하과부하과부하 임계값임계값임계값임계값 정격 전류의 70에서 150% 90% LOC
보기(p.54)
상단의 어플리케이션 과부하 시간 지연 tOL이 nO로 설정되지 않은 경우만 보여집니다.
과부하과부하과부하과부하 오류에오류에오류에오류에 의한의한의한의한 자동자동자동자동 재시작재시작재시작재시작 전전전전 시간시간시간시간 지연지연지연지연 0 to 6 min 0 min FtO
Atr = YES이면, 인버터는 과부하 오류 OLC가 이 시간 지연이 경과한 후에 자동적으로 재시작
합니다. 최소 시간 허용치는 과부하가 감지되고 자동으로 재시작하는 사이이다.
자동 재시작이 가능하도록 하기 위해서, 최소 재시작 시간 tAr(p.91)의 값이, 이 파라미터를 최
소한 1분을 반드시 넘어아만 합니다.
상단의 어플리케이션 과부하 시간 지연 tOL이 nO로 설정되지 않아야만 보여집니다.
어플리케이션어플리케이션어플리케이션어플리케이션 부족부족부족부족 부하부하부하부하 시간시간시간시간 지연지연지연지연 0 to 100 s 0 s ULt
보기(p.55)
PID 피드백 할당 PIF(p.72)가 nO로 설정되지 않은 경우만 보여집니다.
어플리케이션어플리케이션어플리케이션어플리케이션 부부부부족족족족 부하부하부하부하 임계값임계값임계값임계값 정격 전류의 20에서 100% 60% LUL
보기(p.55)
상단의 어플리케이션 부족 부하 시간 지연 ULt가 nO로 설정되지 않은 경우만 보여집니다.
동작 또는 정지 시에 수정이 가능한 파라미터

78
ConF 설정 모드 – 완성 메뉴(FULL)
코드 이름/설명 조정 범위 공장치
Fun- 기능기능기능기능 메뉴메뉴메뉴메뉴 ( ( ( (계속계속계속계속))))
PId- PID PID PID PID 메뉴메뉴메뉴메뉴 ((((계속계속계속계속)))) PMP- 펌프펌프펌프펌프 예하예하예하예하----메뉴메뉴메뉴메뉴
부족부족부족부족 부하부하부하부하 오류에오류에오류에오류에 의한의한의한의한 자동자동자동자동 재시작재시작재시작재시작 전전전전 시간시간시간시간 지연지연지연지연 0 to 6 min 0 min FtU
Atr = YES이면, 인버터는 부족 부하 오류 ULF가 이 시간 지연이 경과한 후에 자동적으로 재시
작합니다. 최소 시간 허용치는 과부하가 감지되고 자동으로 재시작하는 사이이다.
자동 재시작이 가능하도록 하기 위해서, 최소 재시작 시간 tAr(p.91)의 값이, 이 파라미터를 최
소한 1분을 반드시 넘어아만 합니다.
상단의 어플리케이션 과부하 시간 지연 Ult가 nO로 설정되지 않아야만 보여집니다.
운전운전운전운전 방식방식방식방식 선택선택선택선택 nO MdE
No: 단일 변수 방식
YES: 단일 변수 방식과 보조 펌프
MdE = YES일 때, LO1출력은 강제로 PMP(p.53)
PID 피드백 할당 PIF(p.72)가 nO로 설정되지 않은 경우만 보여집니다.
보조보조보조보조 펌프의펌프의펌프의펌프의 시작시작시작시작 주파수주파수주파수주파수 0 to tFr HSP FOn
이 주파수 보다 높고, 펌프 시작 시간 지연 tOn 후에,
보조 펌프 시작.
상단의 운전 방식 선택 MdE가 nO로 설정되지 않은 경우만 보여집니다.
보조보조보조보조 펌프펌프펌프펌프 시작시작시작시작 전전전전 시간시간시간시간 지연지연지연지연 0 to 999.9 s 2 s tOn
이 시간은 일시적인 압력 변화에 의한 영향을 피하고, 진동을 방지하는데 필요합니다.
(펌프 시작/정지)
상단의 운전 방식 선택 MdE가 nO로 설정되지 않은 경우만 보여집니다.
보조보조보조보조 펌프펌프펌프펌프 정격정격정격정격 속도속도속도속도 도달도달도달도달 램프램프램프램프 0 to 999.9 s 2 s rOn
상단의 운전 방식 선택 MdE가 nO로 설정되지 않은 경우만 보여집니다.
보조보조보조보조 펌프펌프펌프펌프 정지정지정지정지 주파수주파수주파수주파수 0 to tFr 0 Hz FOF
이 주파수보다 작거나 보조 펌프 정지 명령 전 시간 지연 tOF 후에, 펌프 정지
상단의 운전 방식 선택 MdE가 nO로 설정되지 않은 경우만 보여집니다.
동작 또는 정지 시에 수정이 가능한 파라미터

79
ConF 설정 모드 – 완성 메뉴(FULL)
코드 이름/설명 조정 범위 공장치
Fun- 기능기능기능기능 메뉴메뉴메뉴메뉴 ( ( ( (계속계속계속계속))))
PId- PID PID PID PID 메뉴메뉴메뉴메뉴 ((((계속계속계속계속)))) PMP- 펌프펌프펌프펌프 예하예하예하예하----메뉴메뉴메뉴메뉴 ((((계속계속계속계속))))
보조보조보조보조 펌프펌프펌프펌프 정지정지정지정지 명령명령명령명령 전전전전 시간시간시간시간 지연지연지연지연 0 to 999.9 s 2 s tOF
이 시간은 일시적인 압력 변화에 의한 영향을 피하고, 진동을 방지하는데 필요합니다.
(펌프 시작/정지)
상단의 운전 방식 선택 MdE가 nO로 설정되지 않은 경우만 보여집니다.
보조보조보조보조 펌프펌프펌프펌프 정지정지정지정지 램프램프램프램프 0 to 999.9 s 2 s rOF
상단의 운전 방식 선택 MdE가 nO로 설정되지 않은 경우만 보여집니다.
영영영영 전위전위전위전위 흐름흐름흐름흐름 점검점검점검점검 기간기간기간기간 nO to 20 min nO nFd
값 0은 영 전위 흐름 점검 비활성화합니다.
PID 피드백 할당 PIF(p.72)가 nO로 설정되지 않은 경우만 보여집니다.
영영영영 전위전위전위전위 흐름흐름흐름흐름 점검점검점검점검 활성활성활성활성 임계값임계값임계값임계값 0 to 400 Hz 0 Hz FFd
이 임계값보다 적고, nFd > 0, 보조 펌프가 정지하면, 영 전위 흐름 점검 활성화 됩니다.
상단의 영 전위 흐름 점검 기간 nFd가 nO로 설정되지 않은 경우만 보여집니다.
영영영영 전위전위전위전위 흐름흐름흐름흐름 점검점검점검점검 오프셋오프셋오프셋오프셋 0 to 400 Hz 0 Hz LFd
상단의 영 전위 흐름 점검 기간 nFd가 nO로 설정되지 않은 경우만 보여집니다.
동작 또는 정지 시에 수정이 가능한 파라미터
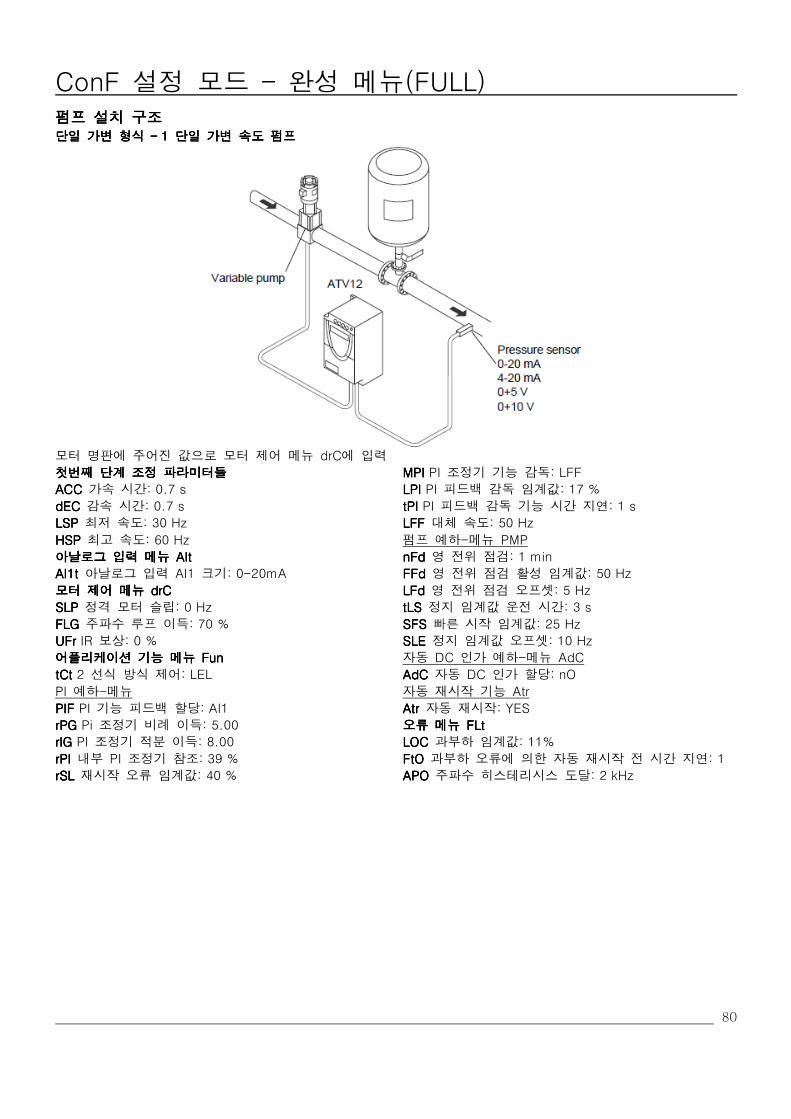
80
ConF 설정 모드 – 완성 메뉴(FULL)
펌프펌프펌프펌프 설치설치설치설치 구조구조구조구조 단일단일단일단일 가변가변가변가변 형식형식형식형식 –––– 1 1 1 1 단일단일단일단일 가변가변가변가변 속도속도속도속도 펌프펌프펌프펌프
모터 명판에 주어진 값으로 모터 제어 메뉴 drC에 입력
첫번째첫번째첫번째첫번째 단계단계단계단계 조정조정조정조정 파라미터들파라미터들파라미터들파라미터들
ACCACCACCACC 가속 시간: 0.7 s
dECdECdECdEC 감속 시간: 0.7 s
LSPLSPLSPLSP 최저 속도: 30 Hz
HSPHSPHSPHSP 최고 속도: 60 Hz
아날로그아날로그아날로그아날로그 입력입력입력입력 메뉴메뉴메뉴메뉴 AIt AIt AIt AIt
AI1tAI1tAI1tAI1t 아날로그 입력 AI1 크기: 0-20mA
모터모터모터모터 제어제어제어제어 메뉴메뉴메뉴메뉴 drC drC drC drC
SLPSLPSLPSLP 정격 모터 슬립: 0 Hz
FLGFLGFLGFLG 주파수 루프 이득: 70 %
UFrUFrUFrUFr IR 보상: 0 %
어플리케이션어플리케이션어플리케이션어플리케이션 기능기능기능기능 메뉴메뉴메뉴메뉴 F F F Fuuuunnnn
tCttCttCttCt 2 선식 방식 제어: LEL
PI 예하-메뉴
PIFPIFPIFPIF PI 기능 피드백 할당: AI1
rPGrPGrPGrPG Pi 조정기 비례 이득: 5.00
rIGrIGrIGrIG PI 조정기 적분 이득: 8.00
rPIrPIrPIrPI 내부 PI 조정기 참조: 39 %
rSLrSLrSLrSL 재시작 오류 임계값: 40 %
MPIMPIMPIMPI PI 조정기 기능 감독: LFF
LPILPILPILPI PI 피드백 감독 임계값: 17 %
tPI tPI tPI tPI PI 피드백 감독 기능 시간 지연: 1 s
LFFLFFLFFLFF 대체 속도: 50 Hz
펌프 예하-메뉴 PMP
nFdnFdnFdnFd 영 전위 점검: 1 min
FFdFFdFFdFFd 영 전위 점검 활성 임계값: 50 Hz
LFdLFdLFdLFd 영 전위 점검 오프셋: 5 Hz
tLStLStLStLS 정지 임계값 운전 시간: 3 s
SFSSFSSFSSFS 빠른 시작 임계값: 25 Hz
SLESLESLESLE 정지 임계값 오프셋: 10 Hz
자동 DC 인가 예하-메뉴 AdC
AdCAdCAdCAdC 자동 DC 인가 할당: nO
자동 재시작 기능 Atr
AtrAtrAtrAtr 자동 재시작: YES
오류오류오류오류 메뉴메뉴메뉴메뉴 FLt FLt FLt FLt
LOCLOCLOCLOC 과부하 임계값: 11%
FtOFtOFtOFtO 과부하 오류에 의한 자동 재시작 전 시간 지연: 1
APOAPOAPOAPO 주파수 히스테리시스 도달: 2 kHz
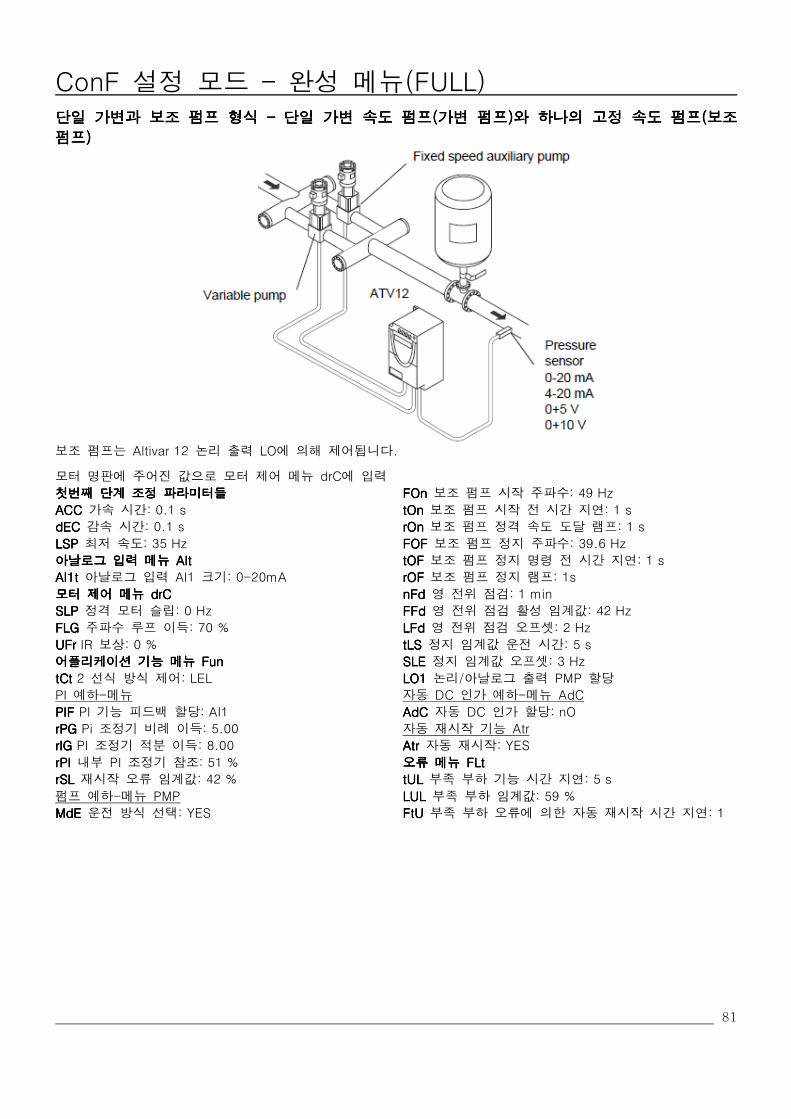
81
ConF 설정 모드 – 완성 메뉴(FULL)
단일단일단일단일 가변과가변과가변과가변과 보조보조보조보조 펌프펌프펌프펌프 형식형식형식형식 –––– 단일단일단일단일 가변가변가변가변 속도속도속도속도 펌프펌프펌프펌프((((가변가변가변가변 펌프펌프펌프펌프))))와와와와 하나의하나의하나의하나의 고정고정고정고정 속도속도속도속도 펌프펌프펌프펌프((((보조보조보조보조
펌프펌프펌프펌프))))
보조 펌프는 Altivar 12 논리 출력 LO에 의해 제어됩니다.
모터 명판에 주어진 값으로 모터 제어 메뉴 drC에 입력
첫번째첫번째첫번째첫번째 단계단계단계단계 조정조정조정조정 파라미터들파라미터들파라미터들파라미터들
ACCACCACCACC 가속 시간: 0.1 s
dECdECdECdEC 감속 시간: 0.1 s
LSPLSPLSPLSP 최저 속도: 35 Hz
아날로그아날로그아날로그아날로그 입력입력입력입력 메뉴메뉴메뉴메뉴 AIt AIt AIt AIt
AI1tAI1tAI1tAI1t 아날로그 입력 AI1 크기: 0-20mA
모터모터모터모터 제어제어제어제어 메뉴메뉴메뉴메뉴 drC drC drC drC
SLPSLPSLPSLP 정격 모터 슬립: 0 Hz
FLGFLGFLGFLG 주파수 루프 이득: 70 %
UFrUFrUFrUFr IR 보상: 0 %
어플리케이션어플리케이션어플리케이션어플리케이션 기능기능기능기능 메뉴메뉴메뉴메뉴 F F F Fuuuunnnn
tCttCttCttCt 2 선식 방식 제어: LEL
PI 예하-메뉴
PIFPIFPIFPIF PI 기능 피드백 할당: AI1
rPGrPGrPGrPG Pi 조정기 비례 이득: 5.00
rIGrIGrIGrIG PI 조정기 적분 이득: 8.00
rPIrPIrPIrPI 내부 PI 조정기 참조: 51 %
rSLrSLrSLrSL 재시작 오류 임계값: 42 %
펌프 예하-메뉴 PMP
MdE MdE MdE MdE 운전 방식 선택: YES
FOn FOn FOn FOn 보조 펌프 시작 주파수: 49 Hz
tOn tOn tOn tOn 보조 펌프 시작 전 시간 지연: 1 s
rOn rOn rOn rOn 보조 펌프 정격 속도 도달 램프: 1 s
FOF FOF FOF FOF 보조 펌프 정지 주파수: 39.6 Hz
tOF tOF tOF tOF 보조 펌프 정지 명령 전 시간 지연: 1 s
rOF rOF rOF rOF 보조 펌프 정지 램프: 1s
nFdnFdnFdnFd 영 전위 점검: 1 min
FFdFFdFFdFFd 영 전위 점검 활성 임계값: 42 Hz
LFLFLFLFdddd 영 전위 점검 오프셋: 2 Hz
tLStLStLStLS 정지 임계값 운전 시간: 5 s
SLESLESLESLE 정지 임계값 오프셋: 3 Hz
LO1 LO1 LO1 LO1 논리/아날로그 출력 PMP 할당
자동 DC 인가 예하-메뉴 AdC
AdCAdCAdCAdC 자동 DC 인가 할당: nO
자동 재시작 기능 Atr
AtrAtrAtrAtr 자동 재시작: YES
오류오류오류오류 메뉴메뉴메뉴메뉴 FLt FLt FLt FLt
tUL tUL tUL tUL 부족 부하 기능 시간 지연: 5 s
LUL LUL LUL LUL 부족 부하 임계값: 59 %
FtU FtU FtU FtU 부족 부하 오류에 의한 자동 재시작 시간 지연: 1

82
ConF 설정 모드 – 완성 메뉴(FULL)
연결연결연결연결 다이어그램다이어그램다이어그램다이어그램
(1) 오류 릴레이 접촉, 인버터 상태의 원격 지시
Note: Note: Note: Note: 인버터 인근 유도성 회로 또는 연결된 같은 회로에 혼선을 억제 (릴레이, 컨택터, 솔레노이드 밸브, 등).
Note: Note: Note: Note: 이 연결의 예제는 내부 전원을 사용합니다.
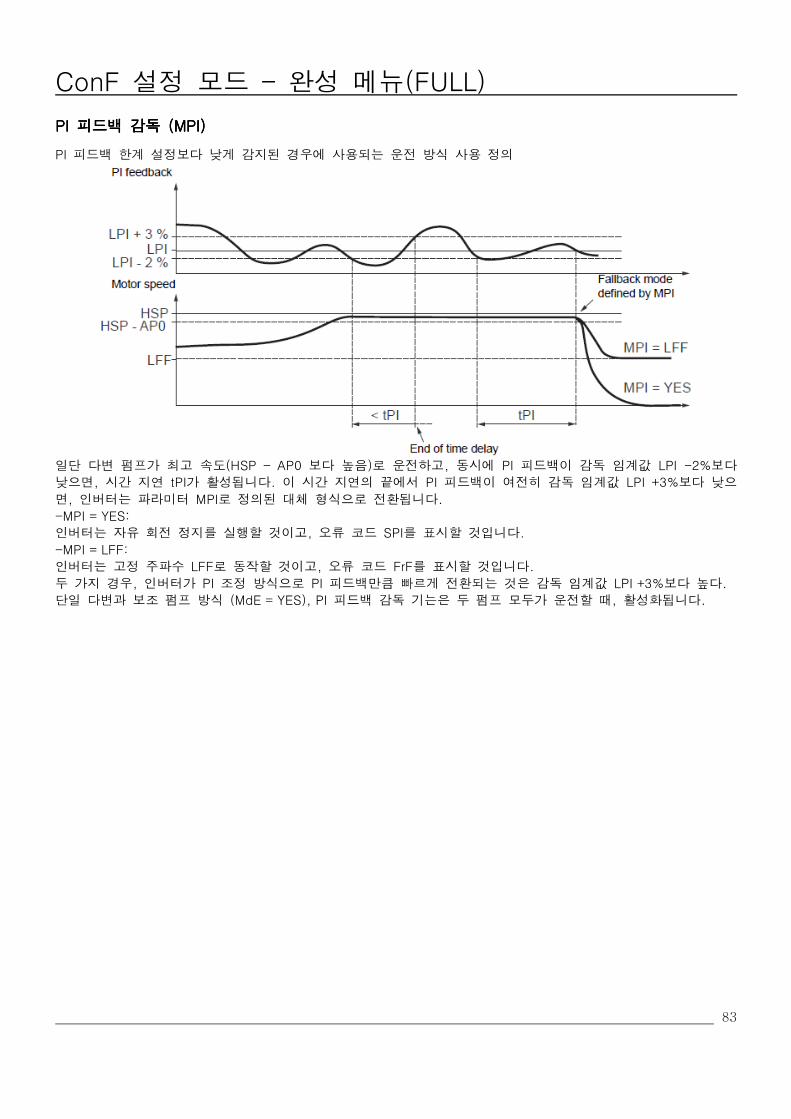
83
ConF 설정 모드 – 완성 메뉴(FULL)
PI PI PI PI 피드백피드백피드백피드백 감독감독감독감독 (MPI) (MPI) (MPI) (MPI)
PI 피드백 한계 설정보다 낮게 감지된 경우에 사용되는 운전 방식 사용 정의
일단 다변 펌프가 최고 속도(HSP – AP0 보다 높음)로 운전하고, 동시에 PI 피드백이 감독 임계값 LPI -2%보다
낮으면, 시간 지연 tPI가 활성됩니다. 이 시간 지연의 끝에서 PI 피드백이 여전히 감독 임계값 LPI +3%보다 낮으
면, 인버터는 파라미터 MPI로 정의된 대체 형식으로 전환됩니다.
-MPI = YES:
인버터는 자유 회전 정지를 실행할 것이고, 오류 코드 SPI를 표시할 것입니다.
-MPI = LFF:
인버터는 고정 주파수 LFF로 동작할 것이고, 오류 코드 FrF를 표시할 것입니다.
두 가지 경우, 인버터가 PI 조정 방식으로 PI 피드백만큼 빠르게 전환되는 것은 감독 임계값 LPI +3%보다 높다.
단일 다변과 보조 펌프 방식 (MdE = YES), PI 피드백 감독 기는은 두 펌프 모두가 운전할 때, 활성화됩니다.

84
ConF 설정 모드 – 완성 메뉴(FULL)
펌프펌프펌프펌프 예하예하예하예하----메뉴메뉴메뉴메뉴 PMP PMP PMP PMP
주요 목표는 단일 ATV12 인버터를 사용하여, 어떠한 흐름에도 변함없는 압력을 제공하는 완벽한 펌프 설치를 제
어하는 것입니다.
시스템은 보조 고정 속도 펌프와 전체 유량을 자체적으로 요구하는 범위를 제공하지 못하는 단일 다변 속도 펌프
를 사용하여 운전합니다. PI 조정기는 인버터 제어에 사용됩니다. 압력 센서는 시스템 피드백을 제공합니다.
다변 속도 펌프는 다변 펌프라고 부릅니다.
고정 속도 펌프는 보조 펌프라고 부릅니다.
운전운전운전운전 방식방식방식방식 선택선택선택선택
ATV12는 두가지 운전 방식을 제공합니다:
단일 다변 방식: 단일 다변 속도 펌프(다변 펌프)
단일 다변과 보조 펌프 방식: 단일 다변 속도 펌프(다변 펌프)와 단일 고정 속도 펌프(보조 펌프)
보조보조보조보조 펌프펌프펌프펌프 제어제어제어제어
PI 조정기 출력(다변 펌프의 주파수 참조)은 아래와 같이, 보조 펌프를 히스테리시스로 보조 펌프를 시작 또는 정
지하는 제어로 사용됩니다:
주파수가 시작 임계값(FOn)을 넘길 때, 시간 지연(tOn)은 일시적인 압력 변화에 의한 영향을 피하기 위해서 활성
화됩니다. 이 시간 지연 후면, 주파수는 시작 임계값보다 높게 남아 있고, 보조 펌프는 시작될 것입니다. 시작 명
령이 보내질 때, 다변 펌프는 전류 속도 참조로부터 보조 펌프 정지 주파수(FOF) 램프를 따라 보조 펌프가 정격
속도에 도달 하기 위해 걸리는 시간과 동일하게 갈 것입니다. 파라미터 rOn은 보조 펌프의 시작에 상승 효과를
최소화하는데 사용됩니다.

85
ConF 설정 모드 – 완성 메뉴(FULL)
주파수가 정지 임계값(FOF)보다 작을 때, 시간 지연(tOF)은 일시적인 압력 변화에 의한 영향을 피하기 위해서 활
성화됩니다. 이 시간 지연 후면, 주파수는 정지 임계값보다 낮게 남아 있고, 보조 펌프는 정지할 것입니다. 정지
명령이 보내질 때, 다변 펌프는 전류 속도 참조로부터 보조 펌프 시작 주파수(FOn) 램프(rOF)를 따라 보조 펌프
의 정지 시간과 동일하게 갈 것입니다. 파라미터 rOF는 보조 펌프의 정지에 상승 효과를 최소화하는데 사용됩니
다.
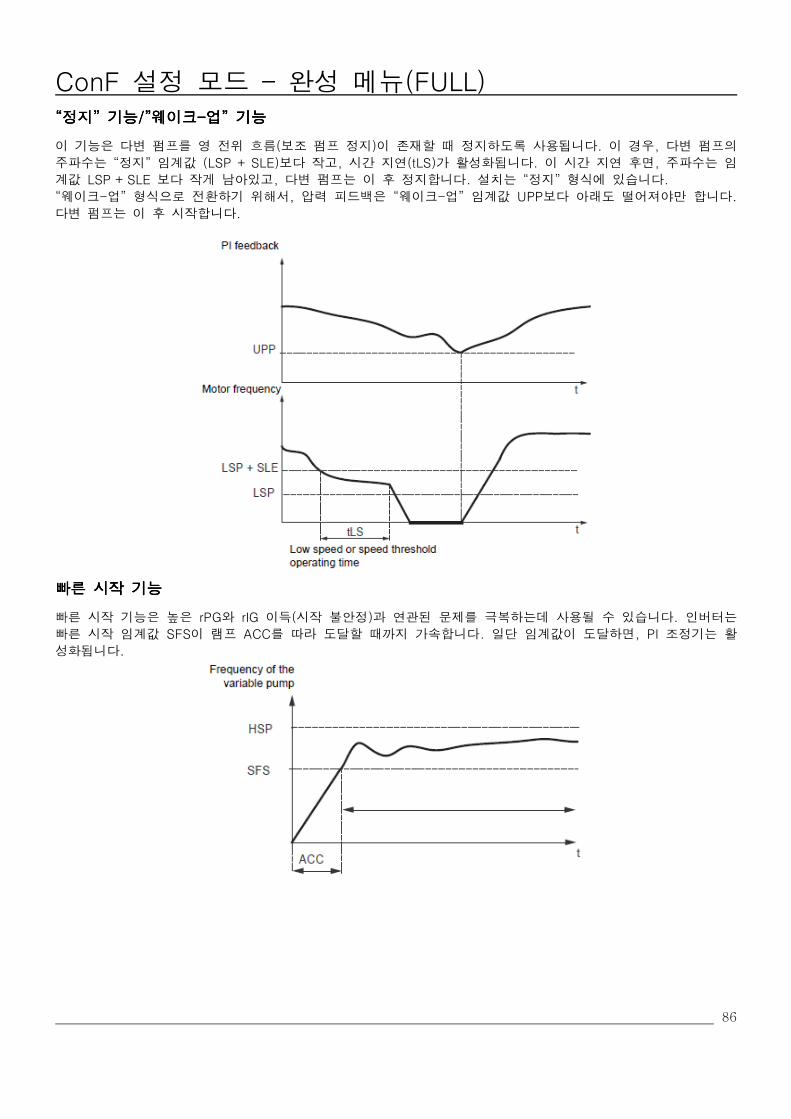
86
ConF 설정 모드 – 완성 메뉴(FULL)
““““정지정지정지정지”””” 기능기능기능기능////””””웨이크웨이크웨이크웨이크----업업업업”””” 기능기능기능기능
이 기능은 다변 펌프를 영 전위 흐름(보조 펌프 정지)이 존재할 때 정지하도록 사용됩니다. 이 경우, 다변 펌프의
주파수는 “정지” 임계값 (LSP + SLE)보다 작고, 시간 지연(tLS)가 활성화됩니다. 이 시간 지연 후면, 주파수는 임
계값 LSP + SLE 보다 작게 남아있고, 다변 펌프는 이 후 정지합니다. 설치는 “정지” 형식에 있습니다.
“웨이크-업” 형식으로 전환하기 위해서, 압력 피드백은 “웨이크-업” 임계값 UPP보다 아래도 떨어져야만 합니다.
다변 펌프는 이 후 시작합니다.
빠른빠른빠른빠른 시작시작시작시작 기능기능기능기능
빠른 시작 기능은 높은 rPG와 rIG 이득(시작 불안정)과 연관된 문제를 극복하는데 사용될 수 있습니다. 인버터는
빠른 시작 임계값 SFS이 램프 ACC를 따라 도달할 때까지 가속합니다. 일단 임계값이 도달하면, PI 조정기는 활
성화됩니다.

87
ConF 설정 모드 – 완성 메뉴(FULL) 영영영영 전위전위전위전위 흐름흐름흐름흐름 감지감지감지감지
이 기능은 보조 펌프가 정지되고, 모터 주파수가 임계값 FFd보다 아래일 때에만, 활성화됩니다.
이 기능은 영 전위 흐름이 정지 기능 단독으로 감지할 수 없는 곳에서 사용됩니다. 이는 인버터 주파수 참조를
LSP + LFd로 정기적으로(nFd 각 시간 간격) 영 전위 흐름을 시험하기 위해서 강제로 적용됩니다.
요구가 여전히 존재하면, PI 오류는 증가하고, 인버터 재시작의 원인이 됩니다.
요구가 더 이상 존재하지 않으면(영 전위), PI 오류는 증가하지 않을 것입니다.
정지 기능을 설정하여, 인버터가 정지 기능으로 영 전위 흐름이 감지(LFd≤SLE)될 때 전환되도록 합니다.

88
ConF 설정 모드 – 완성 메뉴(FULL)
코드 이름/설명 조정 범위 공장치
Fun- 기능기능기능기능 메뉴메뉴메뉴메뉴 ( ( ( (계속계속계속계속))))
CLI- 전류전류전류전류 한계한계한계한계 메뉴메뉴메뉴메뉴 2 2 2 2번째번째번째번째 전류전류전류전류 한계한계한계한계 정류정류정류정류 nO LC2
nO
L1H
L2H
L3H
L4H
L1L
L2L
L3L
L4L
할당
기능 비활성
L1H: LI1 활성 높음
L2H: LI2 활성 높음
L3H: LI3 활성 높음
L4H: LI4 활성 높음
L1L: LI1 활성 낮음
L2L: LI2 활성 낮음
L3L: LI3 활성 낮음
L4L: LI4 활성 낮음
입력이 0이면, 1번째 전류 한계 활성
입력이 1이면, 2번째 전류 한계 활성
LI 할당 정보(p.45)를 볼 것.
전류전류전류전류 한계한계한계한계 0.24 to 1.5 In(1) 1.5 In CLI
1번째 전류 한계
CAUTIONCAUTIONCAUTIONCAUTION 모터모터모터모터 손상손상손상손상 위험위험위험위험 모터가 이 전류에서 견딜 수 있는지 점검하고, 특히, 자기를 잃기 쉬운 영구 자석 동기 모터의 경
우
이러한이러한이러한이러한 사용법들의사용법들의사용법들의사용법들의 이행이행이행이행 실패는실패는실패는실패는, , , , 부상부상부상부상 또는또는또는또는 기계적기계적기계적기계적 손실이손실이손실이손실이 있을있을있을있을 수수수수 있습니다있습니다있습니다있습니다....
전류전류전류전류 한계한계한계한계 2 2 2 2 0.24 to 1.5 In(1) 1.5 In CL2
2번째 전류 한계
이 기능은 인버터 전류 한계를 감소시킵니다.
2번째 전류 한계 정류 LC2가 nO로 설정되지 않은 경우만 보여집니다.
CAUTIONCAUTIONCAUTIONCAUTION 모터모터모터모터 손상손상손상손상 위험위험위험위험 모터가 이 전류에서 견딜 수 있는지 점검하고, 특히, 자기를 잃기 쉬운 영구 자석 동기 모터의 경
우
이러한이러한이러한이러한 사용법들의사용법들의사용법들의사용법들의 이행이행이행이행 실패는실패는실패는실패는, , , , 부상부상부상부상 또는또는또는또는 기계적기계적기계적기계적 손실이손실이손실이손실이 있을있을있을있을 수수수수 있습니다있습니다있습니다있습니다....
(1) In = 인버터 전류
동작 또는 정지 시에 수정이 가능한 파라미터

89
ConF 설정 모드 – 완성 메뉴(FULL)
코드 이름/설명 조정 범위 공장치
Fun- 기능기능기능기능 메뉴메뉴메뉴메뉴 ( ( ( (계속계속계속계속))))
SPL- 속도속도속도속도 한계한계한계한계 메뉴메뉴메뉴메뉴 저속저속저속저속 0 Hz to HSP 0 Hz LSP
최저 참조의 모터 주파수
이 파라미터는 “my menu” (p.44)에 이미 포함되어 있습니다.
저속저속저속저속 운전운전운전운전 시간시간시간시간 0.1 to 999.9s nO tLS
정해진 기간의 저속 LSP에서 운전함에 따라, 모터 정지를 자동으로 요구됩니다. 모터는 주파
수 참조가 저속 LSP보다 크고, 운전 명령이 지속적이면, 재 시작한다.
중요: nO 값은 무제한 기간과 일치
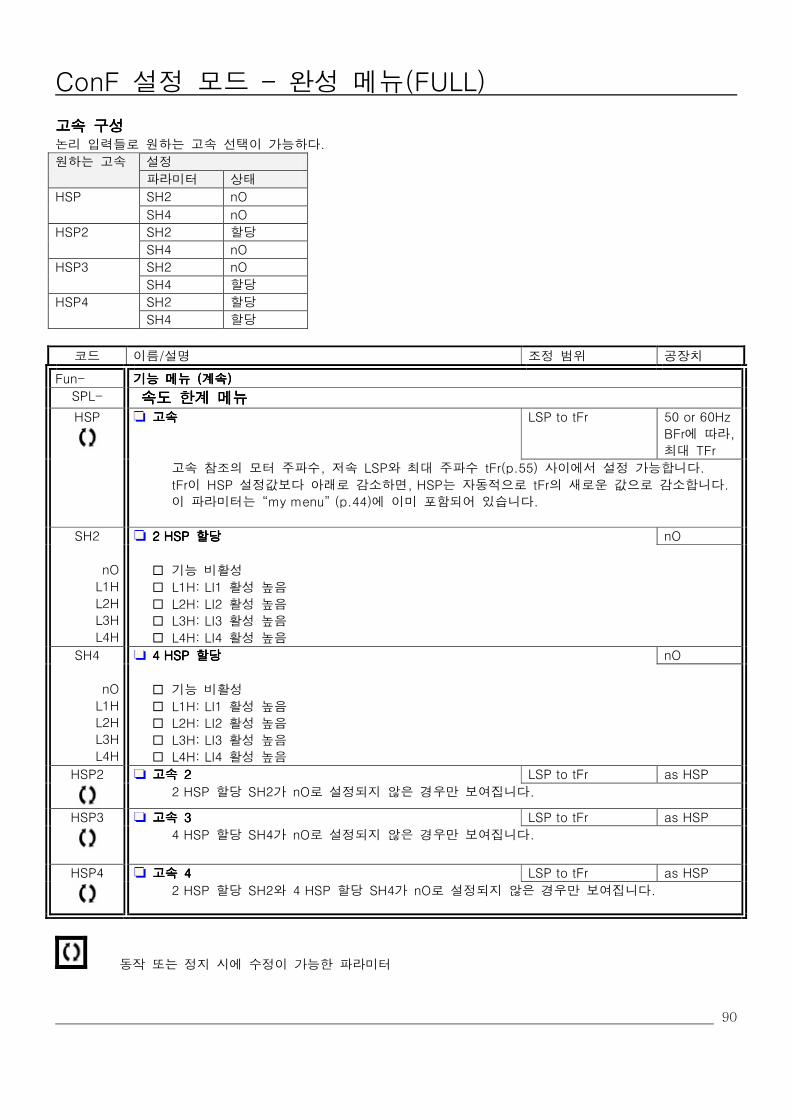
90
ConF 설정 모드 – 완성 메뉴(FULL)
고속고속고속고속 구성구성구성구성 논리 입력들로 원하는 고속 선택이 가능하다.
설정 원하는 고속
파라미터 상태
SH2 nO HSP
SH4 nO
SH2 할당 HSP2
SH4 nO
SH2 nO HSP3
SH4 할당
SH2 할당 HSP4
SH4 할당
코드 이름/설명 조정 범위 공장치
Fun- 기능기능기능기능 메뉴메뉴메뉴메뉴 ( ( ( (계속계속계속계속))))
SPL- 속도속도속도속도 한계한계한계한계 메뉴메뉴메뉴메뉴 고속고속고속고속 LSP to tFr 50 or 60Hz
BFr에 따라,
최대 TFr
HSP
고속 참조의 모터 주파수, 저속 LSP와 최대 주파수 tFr(p.55) 사이에서 설정 가능합니다.
tFr이 HSP 설정값보다 아래로 감소하면, HSP는 자동적으로 tFr의 새로운 값으로 감소합니다.
이 파라미터는 “my menu” (p.44)에 이미 포함되어 있습니다.
2 HSP 2 HSP 2 HSP 2 HSP 할당할당할당할당 nO SH2
nO
L1H
L2H
L3H
L4H
기능 비활성
L1H: LI1 활성 높음
L2H: LI2 활성 높음
L3H: LI3 활성 높음
L4H: LI4 활성 높음
4 HSP 4 HSP 4 HSP 4 HSP 할당할당할당할당 nO SH4
nO
L1H
L2H
L3H
L4H
기능 비활성
L1H: LI1 활성 높음
L2H: LI2 활성 높음
L3H: LI3 활성 높음
L4H: LI4 활성 높음
고속고속고속고속 2 2 2 2 LSP to tFr as HSP HSP2
2 HSP 할당 SH2가 nO로 설정되지 않은 경우만 보여집니다.
고속고속고속고속 3 3 3 3 LSP to tFr as HSP HSP3
4 HSP 할당 SH4가 nO로 설정되지 않은 경우만 보여집니다.
고속고속고속고속 4 4 4 4 LSP to tFr as HSP HSP4
2 HSP 할당 SH2와 4 HSP 할당 SH4가 nO로 설정되지 않은 경우만 보여집니다.
동작 또는 정지 시에 수정이 가능한 파라미터
91
ConF 설정 모드 – 완성 메뉴(FULL)
코드 이름/설명 조정 범위 공장치
FLt- 오오오오류류류류 감지감지감지감지 관리관리관리관리 메뉴메뉴메뉴메뉴 감지감지감지감지된된된된 오류오류오류오류 초기화초기화초기화초기화 할당할당할당할당 nO rSF
nO
L1H
L2H
L3H
L4H
수동 오류 초기화
기능 비활성
L1H: LI1 활성 높음
L2H: LI2 활성 높음
L3H: LI3 활성 높음
L4H: LI4 활성 높음
오류의 원인을 제거했다면, 오류는 할당된 입력 또는 비트가 1로 변경되었을 때, 초기화된다.
그래픽 표시 터미널의 정지/초기화 버튼도 같은 기능을 실행한다.
진단과 문제 해결(p.93)을 봅니다.
Atr- 자동자동자동자동 재시작재시작재시작재시작 메뉴메뉴메뉴메뉴
자동자동자동자동 재시작재시작재시작재시작 nO Atr
nO
YES
DANGERDANGERDANGERDANGER 의도하지의도하지의도하지의도하지 않은않은않은않은 장비장비장비장비 운전운전운전운전
자동 재시작이 사람 또는 장비에 어떠한 방법으로도 위험하지 않은지를 점검합니다.
이러한이러한이러한이러한 사용법들의사용법들의사용법들의사용법들의 이행이행이행이행 실패는실패는실패는실패는, , , , 사망사망사망사망 또는또는또는또는 심각한심각한심각한심각한 부상을부상을부상을부상을 입을입을입을입을 수수수수 있습니다있습니다있습니다있습니다....
이 기능은 오류 후의 인버터 동작에 대해 정의합니다.
설정 시, 이 기능은 오류의 원인이 제거되고, 다른 운전 상태가 재시작이 가능하다면, 자동적
으로 재시작이 가능합니다.
기능 비활성
자동 재시작, 오류의 원인이 제거되고, 다른 운전 상태가 재시작이 가능하다면, 오류 잠금. 재
시작이 증가되는 대기 시간으로 구분되어 자동적으로 시도되도록 실행합니다: 1s, 5s, 10s,
1minute 시도에 따른다.
인버터 오류 릴레이는 그 기능이 활성화 되면, 활성화되도록 남는다. 그 속도 참조와 운전 방
향은 유지되어야만 한다.
2선식 제어를 사용(제어 방식 tCC(p.48)=2C, 2 선식 제어 tCt(p.51)= LEL).
재시작은 최대 자동 재시작 시간을 경과하지 않는다면, 그 과정은 전원이 꺼지고 다시 켜질때
까지 중지되고, 인버터는 잠금 상태로 남습니다.
이 기능을 허용한 오류는 p.95에 목록으로 되어있습니다.
최대최대최대최대 자동자동자동자동 재시작재시작재시작재시작 시간시간시간시간 nO tAr
5
10
30
1H
2H
3H
Ct
5 min
10 min
30 min
1 hour
2 hours
3 hours
무한
자동 재시작 Atr이 nO로 설정되지 않은 경우만 보입니다. 이는 오류가 재발하는데, 연속적으
로 재시작하는 횟수를 제한하는데 사용될 수 있습니다.
92
ConF 설정 모드 – 완성 메뉴(FULL)
코드 이름/설명 조정 범위 공장치
FLt- 오오오오류류류류 감지감지감지감지 관리관리관리관리 메뉴메뉴메뉴메뉴 ((((계속계속계속계속)))) Catch on the fly (Catch on the fly (Catch on the fly (Catch on the fly (즉시즉시즉시즉시 잡기잡기잡기잡기)))) nO FLr
nO
YES
동작 명령이 다음의 경우에도 유지된다면, 부드러운 재시작을 하는데 사용합니다:
선 전원 손실 또는 단절
최근 오류의 초기화 또는 자동 재시작
자유 회전 정지
속도는 재시작 순간의 모터 속도를 계산한 것으로부터 다시 시작하고, 램프를 따라 참조 속도
를 따른다.
이 기능은 2선식 레벨 제어가 요구된다.
기능 비활성
기능 활성
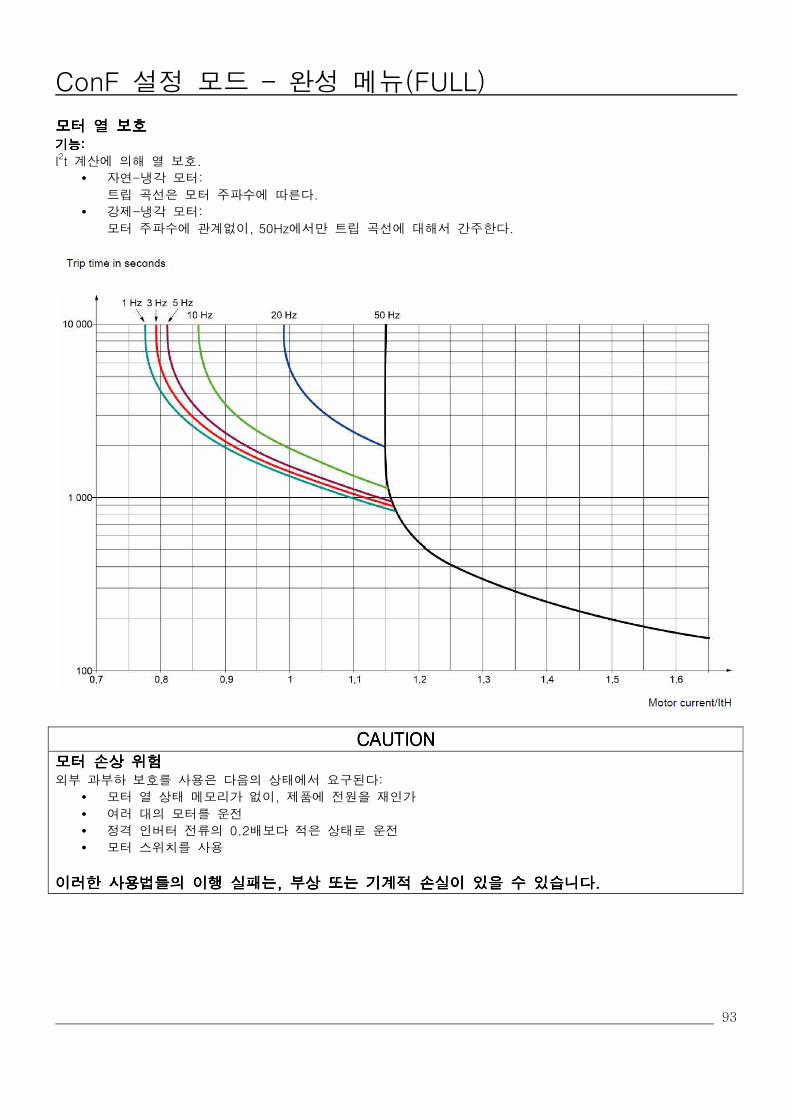
93
ConF 설정 모드 – 완성 메뉴(FULL)
모터모터모터모터 열열열열 보호보호보호보호 기능기능기능기능::::
I2t 계산에 의해 열 보호.
자연-냉각 모터:
트립 곡선은 모터 주파수에 따른다.
강제-냉각 모터:
모터 주파수에 관계없이, 50Hz에서만 트립 곡선에 대해서 간주한다.
CAUTIONCAUTIONCAUTIONCAUTION 모터모터모터모터 손상손상손상손상 위험위험위험위험 외부 과부하 보호를 사용은 다음의 상태에서 요구된다:
모터 열 상태 메모리가 없이, 제품에 전원을 재인가
여러 대의 모터를 운전
정격 인버터 전류의 0.2배보다 적은 상태로 운전
모터 스위치를 사용
이러한이러한이러한이러한 사용법들의사용법들의사용법들의사용법들의 이행이행이행이행 실패는실패는실패는실패는, , , , 부상부상부상부상 또는또는또는또는 기계적기계적기계적기계적 손실이손실이손실이손실이 있을있을있을있을 수수수수 있습니다있습니다있습니다있습니다....
94
ConF 설정 모드 – 완성 메뉴(FULL)
코드 이름/설명 조정 범위 공장치
FLt- 오오오오류류류류 감지감지감지감지 관리관리관리관리 메뉴메뉴메뉴메뉴 ( ( ( (계속계속계속계속)))) tHt- 모터모터모터모터 열열열열 보호보호보호보호 메뉴메뉴메뉴메뉴
모터모터모터모터 열열열열 전류전류전류전류 0.2 to 1.5 In(1) 인버터 정격
에 따라
ItH
모터 열 감지 전류. 모터 명판에 명시된 정격 전류로 ItH를 설정.
모터모터모터모터 보호보호보호보호 방식방식방식방식 ACL tHt
ACL
FCL
자가 환기
모터 환기
과부하과부하과부하과부하 오류오류오류오류 관리관리관리관리 YES OLL
nO
YES
모터 열 오류 발생시, 정지 방식
오류 무시
자유 회전 정지
모터 과부하 OLF(p.109)를 방지하기 위해, 과부하 오류 관리 OLL을 nO로 설정
CAUTIONCAUTIONCAUTIONCAUTION 모터모터모터모터 손상손상손상손상 위험위험위험위험 OLL을 nO로 설정하면, 모터 열 보호는 더 이상 인버터에서 제공되지 않습니다. 열 보호의 대안을
제공합니다.
이러한이러한이러한이러한 사용법들의사용법들의사용법들의사용법들의 이행이행이행이행 실패는실패는실패는실패는, , , , 부상부상부상부상 또는또는또는또는 기계적기계적기계적기계적 손실이손실이손실이손실이 있을있을있을있을 수수수수 있습니다있습니다있습니다있습니다....
모터모터모터모터 열열열열 상태상태상태상태 메모메모메모메모 nO MtM
nO
YES 전원 차단 상태에서 모터 열 상태 저장 안함
전원 차단 상태에서 모터 열 상태 저장
FLt- 오오오오류류류류 감지감지감지감지 관리관리관리관리 메뉴메뉴메뉴메뉴 ( ( ( (계속계속계속계속)))) 출력출력출력출력 결상결상결상결상 YES OPL
nO
YES 기능 비활성
OPF1(단상 결상) 또는 OPF2(3상 결상) 오류에 자유 회전 정지로 트립.
입력입력입력입력 결상결상결상결상 인버터 정격
에 따라
IPL
nO
YES
인버터 정격이 F1이고, 공장 설정치가 nO이면 보이지 않습니다.
인버터 정격이 ATV12F1이고, ATV12M2이면 보이지 않습니다.
공장 설정치가 나타나지 않는 경우
오류 무시. 인버터가 단상 전원 공급일 때, 사용합니다.
오류를 자유 회전 정지
하나의 상이 사라지면 인버터는 오류 상태인 입력 결상 IPL로 전환되지만, 둘 또는 셋의 상이
사라지면, 인버터는 부족 전압 오류로 트립되기까지 운전을 지속합니다.
(1) In = 인버터 전류
동작 또는 정지 시에 수정이 가능한 파라미터
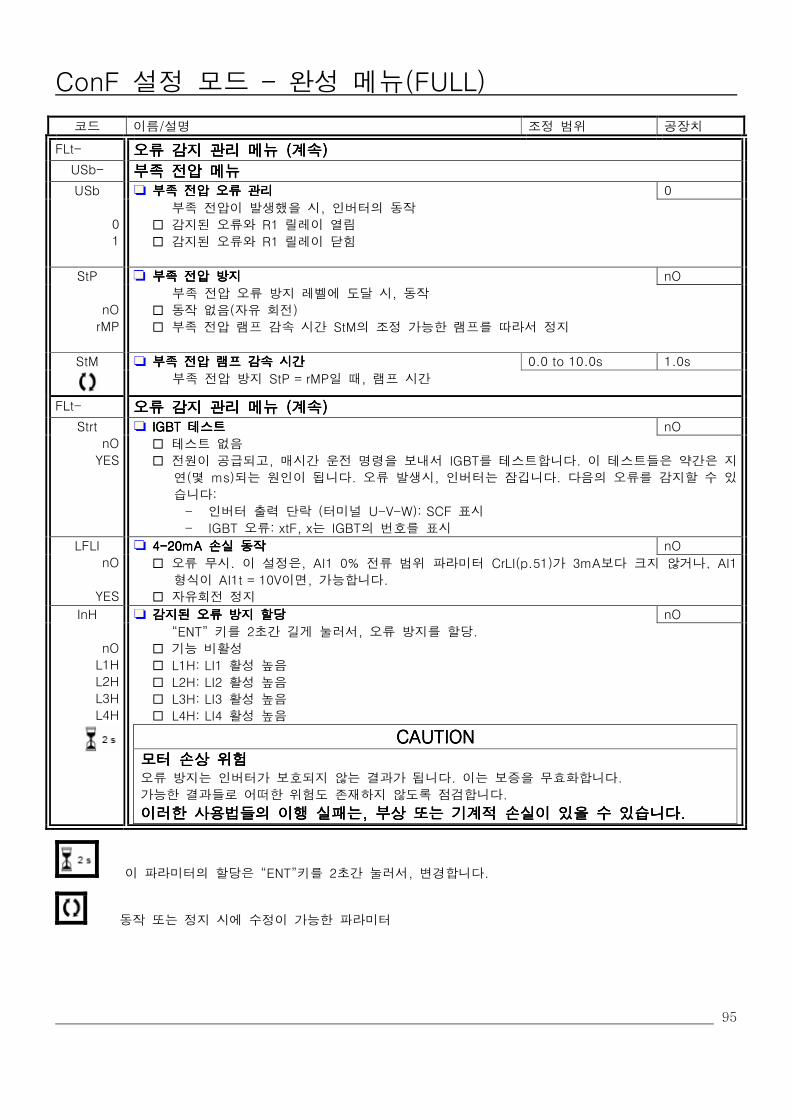
95
ConF 설정 모드 – 완성 메뉴(FULL)
코드 이름/설명 조정 범위 공장치
FLt- 오오오오류류류류 감지감지감지감지 관리관리관리관리 메뉴메뉴메뉴메뉴 ( ( ( (계속계속계속계속)))) USb- 부족부족부족부족 전압전압전압전압 메뉴메뉴메뉴메뉴
부족부족부족부족 전압전압전압전압 오류오류오류오류 관리관리관리관리 0 USb
0
1
부족 전압이 발생했을 시, 인버터의 동작
감지된 오류와 R1 릴레이 열림
감지된 오류와 R1 릴레이 닫힘
부족부족부족부족 전압전압전압전압 방지방지방지방지 nO StP
nO
rMP
부족 전압 오류 방지 레벨에 도달 시, 동작
동작 없음(자유 회전)
부족 전압 램프 감속 시간 StM의 조정 가능한 램프를 따라서 정지
부족부족부족부족 전압전압전압전압 램프램프램프램프 감속감속감속감속 시간시간시간시간 0.0 to 10.0s 1.0s StM
부족 전압 방지 StP = rMP일 때, 램프 시간
FLt- 오오오오류류류류 감지감지감지감지 관리관리관리관리 메뉴메뉴메뉴메뉴 ( ( ( (계속계속계속계속)))) IGBT IGBT IGBT IGBT 테스트테스트테스트테스트 nO Strt
nO
YES
테스트 없음
전원이 공급되고, 매시간 운전 명령을 보내서 IGBT를 테스트합니다. 이 테스트들은 약간은 지
연(몇 ms)되는 원인이 됩니다. 오류 발생시, 인버터는 잠깁니다. 다음의 오류를 감지할 수 있
습니다:
- 인버터 출력 단락 (터미널 U-V-W): SCF 표시
- IGBT 오류: xtF, x는 IGBT의 번호를 표시
4 4 4 4----20mA 20mA 20mA 20mA 손실손실손실손실 동작동작동작동작 nO LFLI
nO
YES
오류 무시. 이 설정은, AI1 0% 전류 범위 파라미터 CrLI(p.51)가 3mA보다 크지 않거나, AI1
형식이 AI1t = 10V이면, 가능합니다.
자유회전 정지
감지된감지된감지된감지된 오류오류오류오류 방지방지방지방지 할당할당할당할당 nO InH
nO
L1H
L2H
L3H
L4H
“ENT” 키를 2초간 길게 눌러서, 오류 방지를 할당.
기능 비활성
L1H: LI1 활성 높음
L2H: LI2 활성 높음
L3H: LI3 활성 높음
L4H: LI4 활성 높음
CAUTIONCAUTIONCAUTIONCAUTION 모터모터모터모터 손상손상손상손상 위험위험위험위험 오류 방지는 인버터가 보호되지 않는 결과가 됩니다. 이는 보증을 무효화합니다.
가능한 결과들로 어떠한 위험도 존재하지 않도록 점검합니다.
이러한이러한이러한이러한 사용법들의사용법들의사용법들의사용법들의 이행이행이행이행 실패는실패는실패는실패는, , , , 부상부상부상부상 또는또는또는또는 기계적기계적기계적기계적 손실이손실이손실이손실이 있을있을있을있을 수수수수 있습니다있습니다있습니다있습니다....
이 파라미터의 할당은 “ENT”키를 2초간 눌러서, 변경합니다.
동작 또는 정지 시에 수정이 가능한 파라미터
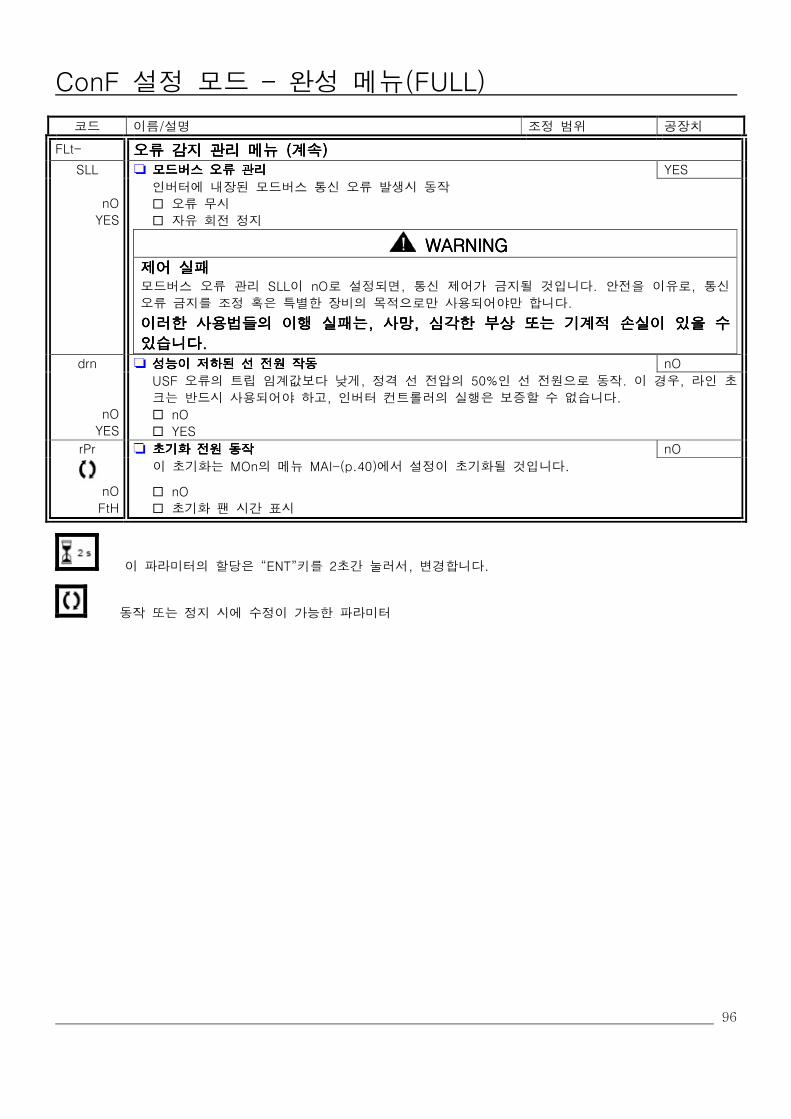
96
ConF 설정 모드 – 완성 메뉴(FULL)
코드 이름/설명 조정 범위 공장치
FLt- 오오오오류류류류 감지감지감지감지 관리관리관리관리 메뉴메뉴메뉴메뉴 ( ( ( (계속계속계속계속)))) 모드버스모드버스모드버스모드버스 오류오류오류오류 관리관리관리관리 YES SLL
nO
YES
인버터에 내장된 모드버스 통신 오류 발생시 동작
오류 무시
자유 회전 정지
WARNIN WARNIN WARNIN WARNINGGGG 제어제어제어제어 실패실패실패실패 모드버스 오류 관리 SLL이 nO로 설정되면, 통신 제어가 금지될 것입니다. 안전을 이유로, 통신
오류 금지를 조정 혹은 특별한 장비의 목적으로만 사용되어야만 합니다.
이러한이러한이러한이러한 사용법들의사용법들의사용법들의사용법들의 이행이행이행이행 실패는실패는실패는실패는, , , , 사망사망사망사망, , , , 심각한심각한심각한심각한 부상부상부상부상 또는또는또는또는 기계적기계적기계적기계적 손실이손실이손실이손실이 있을있을있을있을 수수수수
있습니다있습니다있습니다있습니다.... 성능이성능이성능이성능이 저하된저하된저하된저하된 선선선선 전원전원전원전원 작동작동작동작동 nO drn
nO
YES
USF 오류의 트립 임계값보다 낮게, 정격 선 전압의 50%인 선 전원으로 동작. 이 경우, 라인 초
크는 반드시 사용되어야 하고, 인버터 컨트롤러의 실행은 보증할 수 없습니다.
nO
YES
초기화초기화초기화초기화 전원전원전원전원 동작동작동작동작 nO rPr
nO
FtH
이 초기화는 MOn의 메뉴 MAI-(p.40)에서 설정이 초기화될 것입니다.
nO
초기화 팬 시간 표시
이 파라미터의 할당은 “ENT”키를 2초간 눌러서, 변경합니다.
동작 또는 정지 시에 수정이 가능한 파라미터

97
ConF 설정 모드 – 완성 메뉴(FULL)
코드 이름/설명 조정 범위 공장치
COM- 통신통신통신통신 메뉴메뉴메뉴메뉴 모드버스모드버스모드버스모드버스 주소주소주소주소 OFF to 247 OFF Add
모드버스 주소는 OFF에서 247까지 조정 가능하다. OFF일 때, 통신은 활성화되지 않는다.
모드버스모드버스모드버스모드버스 보드보드보드보드 레이트레이트레이트레이트 19.2 tbr
4.8
9.6
19.2
38.4
4.8 kbps
9.6 kbps
19.2 kbps
38.4 kbps
모드버스모드버스모드버스모드버스 체제체제체제체제 8E1 tfO
8o1
8E1
8N1
8N2
8o1
8E1
8N1
8N2
모드버스모드버스모드버스모드버스 타임타임타임타임 아웃아웃아웃아웃 0.1 to 30s 10s Tto
인버터는 사전에 정의된 시간(타임 아웃) 안에 주어진 주소로 어떠한 모드버스 요청도 받지
못한다면, 모드버스 오류를 감지합니다.
ICS- 입력입력입력입력 스캐너스캐너스캐너스캐너 메뉴메뉴메뉴메뉴 (값은 16진수로 표기) 통신통신통신통신 스캐너스캐너스캐너스캐너 읽기읽기읽기읽기 주소주소주소주소 파라미터파라미터파라미터파라미터 1 1 1 1 0C81 nMA1
1번째 입력 word 주소
통신통신통신통신 스캐너스캐너스캐너스캐너 읽기읽기읽기읽기 주소주소주소주소 파라미터파라미터파라미터파라미터 2 2 2 2 219C nMA2
2번째 입력 word 주소
통신통신통신통신 스캐너스캐너스캐너스캐너 읽기읽기읽기읽기 주소주소주소주소 파라미터파라미터파라미터파라미터 3 3 3 3 0 nMA3
3번째 입력 word 주소
통신통신통신통신 스캐너스캐너스캐너스캐너 읽기읽기읽기읽기 주소주소주소주소 파라미터파라미터파라미터파라미터 4 4 4 4 0 nMA4
4번째 입력 word 주소
OCS- 출력출력출력출력 스캐너스캐너스캐너스캐너 메뉴메뉴메뉴메뉴 (값은 16진수로 표기) 통신통신통신통신 스캐너스캐너스캐너스캐너 쓰기쓰기쓰기쓰기 주소주소주소주소 파라미터파라미터파라미터파라미터 1 1 1 1 2135 nCA1
1번째 출력 word 주소
통신통신통신통신 스캐너스캐너스캐너스캐너 쓰기쓰기쓰기쓰기 주소주소주소주소 파라미터파라미터파라미터파라미터 2 2 2 2 219A nCA2
2번째 출력 word 주소
통신통신통신통신 스캐너스캐너스캐너스캐너 쓰기쓰기쓰기쓰기 주소주소주소주소 파라미터파라미터파라미터파라미터 3 3 3 3 0 nCA3
3번째 출력 word 주소
통신통신통신통신 스캐너스캐너스캐너스캐너 쓰기쓰기쓰기쓰기 주소주소주소주소 파라미터파라미터파라미터파라미터 4 4 4 4 0 nCA4
4번째 출력 word 주소

98
ConF 설정 모드 – 완성 메뉴(FULL)
코드 이름/설명 조정 범위 공장치
COM- 통신통신통신통신 메뉴메뉴메뉴메뉴 ( ( ( (계속계속계속계속))))
ISA- 입력입력입력입력 스캐너스캐너스캐너스캐너 메뉴메뉴메뉴메뉴 (값은 16진수로 표기) 통신통신통신통신 스캐너스캐너스캐너스캐너 읽기읽기읽기읽기 주소주소주소주소 값값값값 1 1 1 1 ETA 값 nM1
1번째 입력 word 값
통신통신통신통신 스캐너스캐너스캐너스캐너 읽기읽기읽기읽기 주소주소주소주소 값값값값 2 2 2 2 RFRD 값 nM2
2번째 입력 word 값
통신통신통신통신 스캐너스캐너스캐너스캐너 읽기읽기읽기읽기 주소주소주소주소 값값값값 3 3 3 3 0 nM3
3번째 입력 word 값
통신통신통신통신 스캐너스캐너스캐너스캐너 읽기읽기읽기읽기 주소주소주소주소 값값값값 4 4 4 4 0 nM4
4번째 입력 word 값
OSA- 출력출력출력출력 스캐너스캐너스캐너스캐너 메뉴메뉴메뉴메뉴 (값은 16진수로 표기) 통신통신통신통신 스캐너스캐너스캐너스캐너 쓰기쓰기쓰기쓰기 주소주소주소주소 값값값값 1 1 1 1 CMD 값 nC1
1번째 출력 word 값
통신통신통신통신 스캐스캐스캐스캐너너너너 쓰기쓰기쓰기쓰기 주소주소주소주소 값값값값 2 2 2 2 LFRD 값 nC2
2번째 출력 word 값
통신통신통신통신 스캐너스캐너스캐너스캐너 쓰기쓰기쓰기쓰기 주소주소주소주소 값값값값 3 3 3 3 0 nC3
3번째 출력 word 값
통신통신통신통신 스캐너스캐너스캐너스캐너 쓰기쓰기쓰기쓰기 주소주소주소주소 값값값값 4 4 4 4 0 nC4
4번째 출력 word 값
동작 또는 정지 시에 수정이 가능한 파라미터

99
유지 보수
서비스서비스서비스서비스 Altivar12는 어떠한 예방 유지 보수가 요구되지 않습니다. 그러나, 다음의 점검을 규칙적으로 실행하는 것을 권고
합니다:
인버터 상태와 결선 상태
허용 가능한 레벨의 제품 주변 온도와 환기가 적합한지 확인합니다. 팬의 평균 서비스 수명: 10년
인버터로부터 어떠한 먼지도 제거합니다.
팬 동작이 적합한지 확인합니다.
커버의 물리적 충격
유지유지유지유지 보수를보수를보수를보수를 위한위한위한위한 도움도움도움도움, , , , 감지된감지된감지된감지된 오류오류오류오류 표시표시표시표시 설치 또는 운전 중에 문제가 생긴다면, 주변, 설치와 결선 상태 준수 여부와 연관 지어 권고상태를 확인합니다.
첫 번째 감지된 오류는 저장, 표시되고, 표시 창에 깜빡입니다: 인버터 잠금과 릴레이 R1 접점 상태 열림
감지된감지된감지된감지된 오류오류오류오류 제거제거제거제거 초기화되지 않는 오류발생시, 인버터 전원 연결을 끊습니다.
표시가 완전히 사라질 때까지 기다립니다.
감지된 오류의 원인을 찾고 수정합니다.
전원을 인버터에 재인가 합니다.
감지된 오류는 그 원인이 수정이 되었다면 더 이상 나타나지 않을 것입니다.
초기화되지 않는 오류의 발생:
인버터로의 전원 제거/절단
DC bus 캐패시터가 방전될 때까지 15151515분간을분간을분간을분간을 기다립니다기다립니다기다립니다기다립니다. 그리고 나서, “Bus 전압 측정 과정”(p.13)을 따
라 DC 전압이 42V 이하인지 확인합니다. 인버터의 LED는 DC bus 전압 부재 시, 나타나지 않습니다.
감지된 오류를 찾고 수정합니다.
인버터에 전원을 재인가하여, 감지된 오류가 수정되도록 합니다.
확실히확실히확실히확실히 감지된감지된감지된감지된 오류는오류는오류는오류는 원인이원인이원인이원인이 사라진사라진사라진사라진 후에후에후에후에 자동으로자동으로자동으로자동으로 재시작할재시작할재시작할재시작할 수수수수 있도록있도록있도록있도록 프로그램할프로그램할프로그램할프로그램할 수수수수 있습니다있습니다있습니다있습니다....
이 감지된 오류들은 인버터로의 순환 전원 또는 논린 입력과 bit 제어방법으로 초기화 또한 할 수 있습니다.
표시표시표시표시 메뉴메뉴메뉴메뉴 표시 메뉴를 사용하여 인버터 상태와 감지된 오류의 원인을 찾아 처리한 것과 같은 최근 값을 보여줍니다.
스페어와스페어와스페어와스페어와 수리수리수리수리 서비스 가능한 제품: 카탈로그의 스페어 부분 대체물을 참고합니다.
오랜오랜오랜오랜 시간시간시간시간 보관보관보관보관 후후후후 과정과정과정과정
WARNING WARNING WARNING WARNING 전원전원전원전원 인가인가인가인가 시시시시, , , , 폭발폭발폭발폭발 위험성위험성위험성위험성 오랜 시간 보관 후 캐패시터에 문제가 생길 수 있습니다. 2년과 3년 사이의 보관 시간을 따라:
하나의 AC 전원 변수를 사용 L1,L2와 L3사이에 연결
AC 선 전압을 증가:
- 정격 전압의 25%를 30분 동안
- 정격 전압의 50%를 30분 동안
- 정격 전압의 75%를 30분 동안
- 정격 전압의 100%를 30분 동안
이러한이러한이러한이러한 사용법들의사용법들의사용법들의사용법들의 이행이행이행이행 실패는실패는실패는실패는, , , , 사망사망사망사망, , , , 심각한심각한심각한심각한 부상부상부상부상 또는또는또는또는 기계적기계적기계적기계적 손실이손실이손실이손실이 있을있을있을있을 수수수수 있습니다있습니다있습니다있습니다....
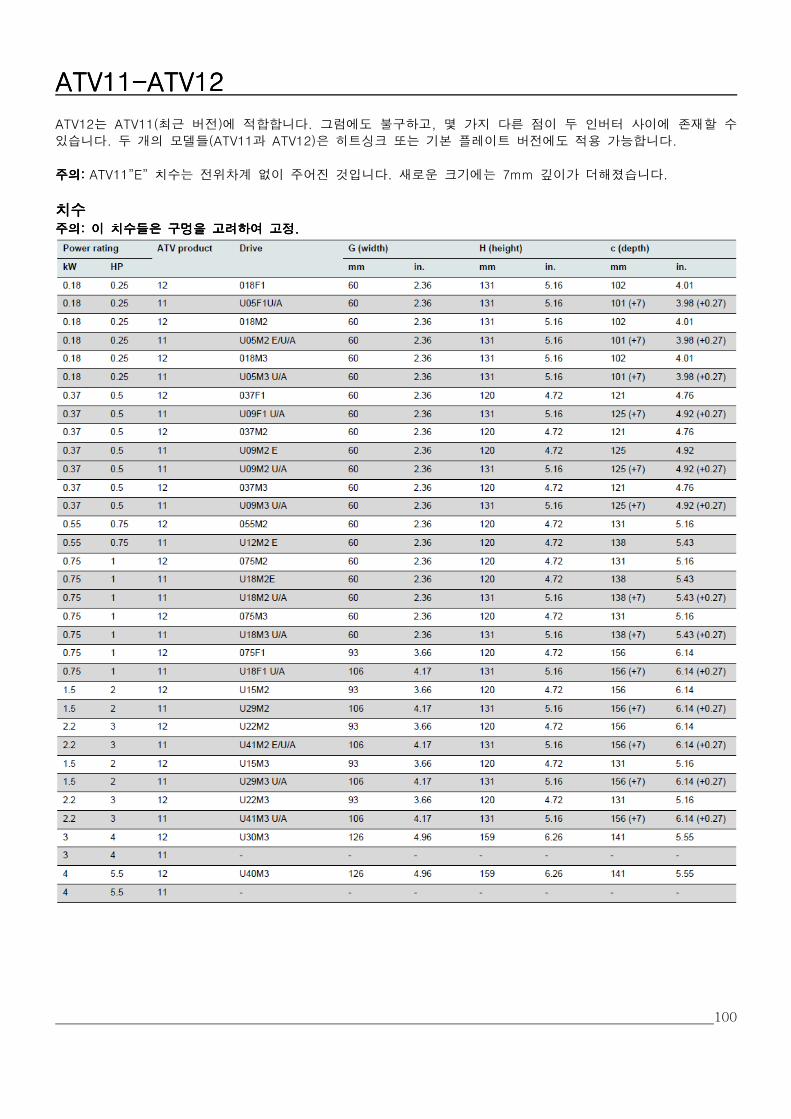
100
ATV11ATV11ATV11ATV11----ATV12ATV12ATV12ATV12
ATV12는 ATV11(최근 버전)에 적합합니다. 그럼에도 불구하고, 몇 가지 다른 점이 두 인버터 사이에 존재할 수
있습니다. 두 개의 모델들(ATV11과 ATV12)은 히트싱크 또는 기본 플레이트 버전에도 적용 가능합니다.
주의주의주의주의:::: ATV11”E” 치수는 전위차계 없이 주어진 것입니다. 새로운 크기에는 7mm 깊이가 더해졌습니다.
치수치수치수치수 주의주의주의주의: : : : 이이이이 치수들은치수들은치수들은치수들은 구멍을구멍을구멍을구멍을 고려하여고려하여고려하여고려하여 고정고정고정고정....
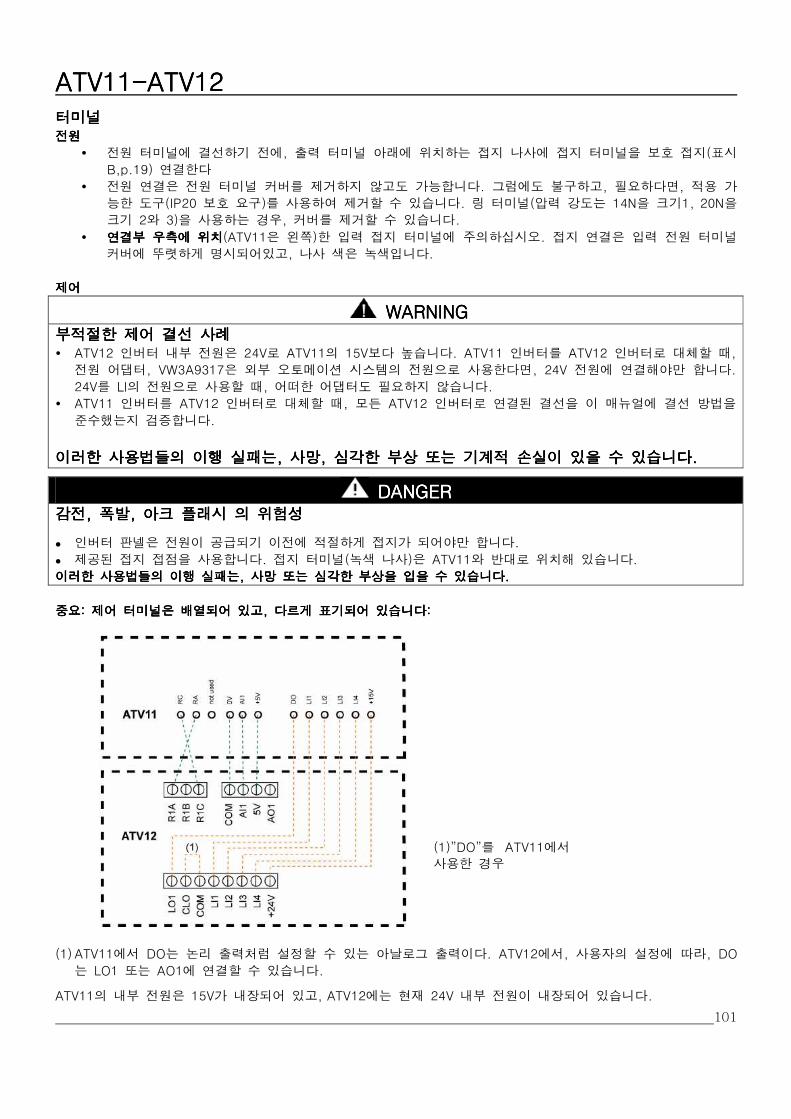
101
ATV11ATV11ATV11ATV11----ATV12ATV12ATV12ATV12
터미널터미널터미널터미널 전원전원전원전원
전원 터미널에 결선하기 전에, 출력 터미널 아래에 위치하는 접지 나사에 접지 터미널을 보호 접지(표시
B,p.19) 연결한다
전원 연결은 전원 터미널 커버를 제거하지 않고도 가능합니다. 그럼에도 불구하고, 필요하다면, 적용 가
능한 도구(IP20 보호 요구)를 사용하여 제거할 수 있습니다. 링 터미널(압력 강도는 14N을 크기1, 20N을
크기 2와 3)을 사용하는 경우, 커버를 제거할 수 있습니다.
연결부연결부연결부연결부 우측에우측에우측에우측에 위치위치위치위치(ATV11은 왼쪽)한 입력 접지 터미널에 주의하십시오. 접지 연결은 입력 전원 터미널
커버에 뚜렷하게 명시되어있고, 나사 색은 녹색입니다.
제어제어제어제어
WARNING WARNING WARNING WARNING 부적절한부적절한부적절한부적절한 제어제어제어제어 결선결선결선결선 사례사례사례사례 ATV12 인버터 내부 전원은 24V로 ATV11의 15V보다 높습니다. ATV11 인버터를 ATV12 인버터로 대체할 때,
전원 어댑터, VW3A9317은 외부 오토메이션 시스템의 전원으로 사용한다면, 24V 전원에 연결해야만 합니다.
24V를 LI의 전원으로 사용할 때, 어떠한 어댑터도 필요하지 않습니다.
ATV11 인버터를 ATV12 인버터로 대체할 때, 모든 ATV12 인버터로 연결된 결선을 이 매뉴얼에 결선 방법을
준수했는지 검증합니다.
이러한이러한이러한이러한 사용법들의사용법들의사용법들의사용법들의 이행이행이행이행 실패는실패는실패는실패는, , , , 사망사망사망사망, , , , 심각한심각한심각한심각한 부상부상부상부상 또는또는또는또는 기기기기계적계적계적계적 손실이손실이손실이손실이 있을있을있을있을 수수수수 있습니다있습니다있습니다있습니다....
DANGERDANGERDANGERDANGER 감전감전감전감전, , , , 폭발폭발폭발폭발, , , , 아크아크아크아크 플래시플래시플래시플래시 의의의의 위험성위험성위험성위험성
인버터 판넬은 전원이 공급되기 이전에 적절하게 접지가 되어야만 합니다. 제공된 접지 접점을 사용합니다. 접지 터미널(녹색 나사)은 ATV11와 반대로 위치해 있습니다. 이러한이러한이러한이러한 사용법들의사용법들의사용법들의사용법들의 이행이행이행이행 실패는실패는실패는실패는, , , , 사망사망사망사망 또는또는또는또는 심각한심각한심각한심각한 부상을부상을부상을부상을 입을입을입을입을 수수수수 있습니다있습니다있습니다있습니다....
중요중요중요중요: : : : 제어제어제어제어 터미널은터미널은터미널은터미널은 배열되어배열되어배열되어배열되어 있고있고있고있고, , , , 다르게다르게다르게다르게 표기되어표기되어표기되어표기되어 있습니다있습니다있습니다있습니다::::
(1) ATV11에서 DO는 논리 출력처럼 설정할 수 있는 아날로그 출력이다. ATV12에서, 사용자의 설정에 따라, DO
는 LO1 또는 AO1에 연결할 수 있습니다.
ATV11의 내부 전원은 15V가 내장되어 있고, ATV12에는 현재 24V 내부 전원이 내장되어 있습니다.
(1)”DO”를 ATV11에서
사용한 경우
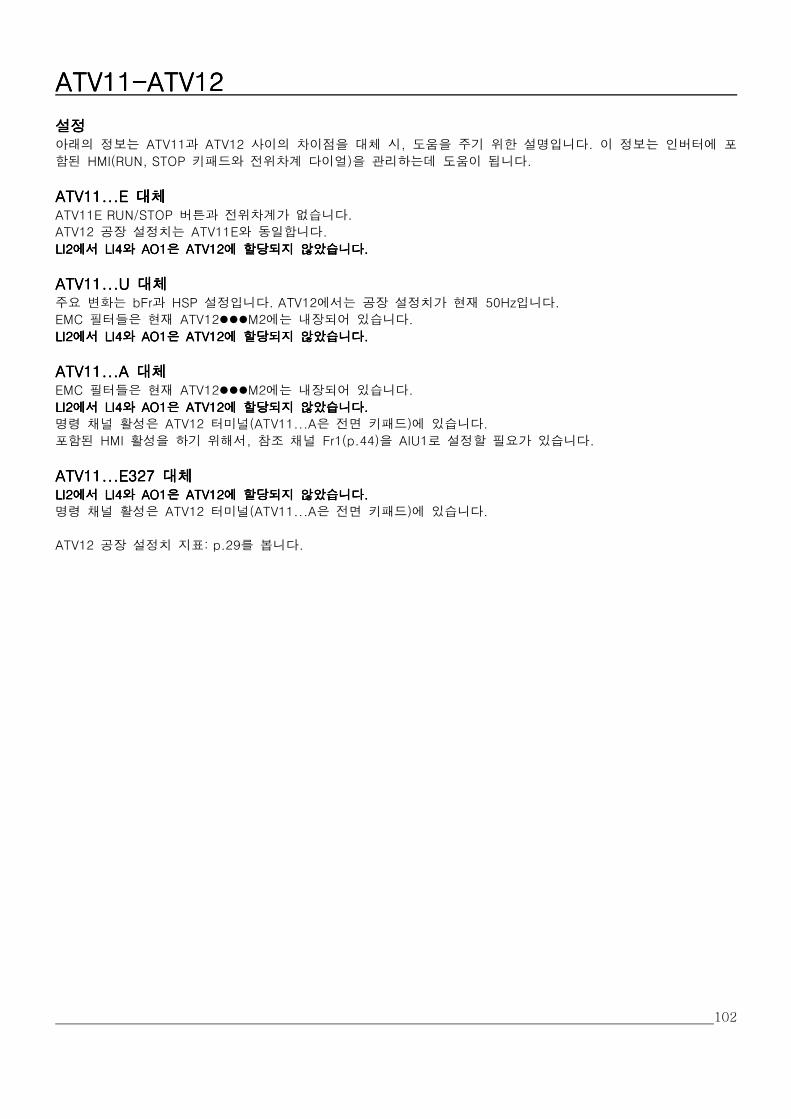
102
ATV11ATV11ATV11ATV11----ATV12ATV12ATV12ATV12
설정설정설정설정 아래의 정보는 ATV11과 ATV12 사이의 차이점을 대체 시, 도움을 주기 위한 설명입니다. 이 정보는 인버터에 포
함된 HMI(RUN, STOP 키패드와 전위차계 다이얼)을 관리하는데 도움이 됩니다.
ATV11...E ATV11...E ATV11...E ATV11...E 대체대체대체대체 ATV11E RUN/STOP 버튼과 전위차계가 없습니다.
ATV12 공장 설정치는 ATV11E와 동일합니다.
LI2LI2LI2LI2에서에서에서에서 LI4 LI4 LI4 LI4와와와와 AO1 AO1 AO1 AO1은은은은 ATV12 ATV12 ATV12 ATV12에에에에 할당되지할당되지할당되지할당되지 않았습니다않았습니다않았습니다않았습니다....
ATV11...U ATV11...U ATV11...U ATV11...U 대체대체대체대체 주요 변화는 bFr과 HSP 설정입니다. ATV12에서는 공장 설정치가 현재 50Hz입니다.
EMC 필터들은 현재 ATV12M2에는 내장되어 있습니다.
LI2LI2LI2LI2에서에서에서에서 LI4 LI4 LI4 LI4와와와와 AO1 AO1 AO1 AO1은은은은 ATV12 ATV12 ATV12 ATV12에에에에 할당되지할당되지할당되지할당되지 않았습니다않았습니다않았습니다않았습니다....
ATV11ATV11ATV11ATV11...A ...A ...A ...A 대체대체대체대체 EMC 필터들은 현재 ATV12M2에는 내장되어 있습니다.
LI2LI2LI2LI2에서에서에서에서 LI4 LI4 LI4 LI4와와와와 AO1 AO1 AO1 AO1은은은은 ATV12 ATV12 ATV12 ATV12에에에에 할당되지할당되지할당되지할당되지 않았습니다않았습니다않았습니다않았습니다....
명령 채널 활성은 ATV12 터미널(ATV11...A은 전면 키패드)에 있습니다.
포함된 HMI 활성을 하기 위해서, 참조 채널 Fr1(p.44)을 AIU1로 설정할 필요가 있습니다.
ATV11...E327 ATV11...E327 ATV11...E327 ATV11...E327 대체대체대체대체 LI2LI2LI2LI2에서에서에서에서 LI4 LI4 LI4 LI4와와와와 AO1 AO1 AO1 AO1은은은은 ATV12 ATV12 ATV12 ATV12에에에에 할당되지할당되지할당되지할당되지 않았습니다않았습니다않았습니다않았습니다....
명령 채널 활성은 ATV12 터미널(ATV11...A은 전면 키패드)에 있습니다.
ATV12 공장 설정치 지표: p.29를 봅니다.
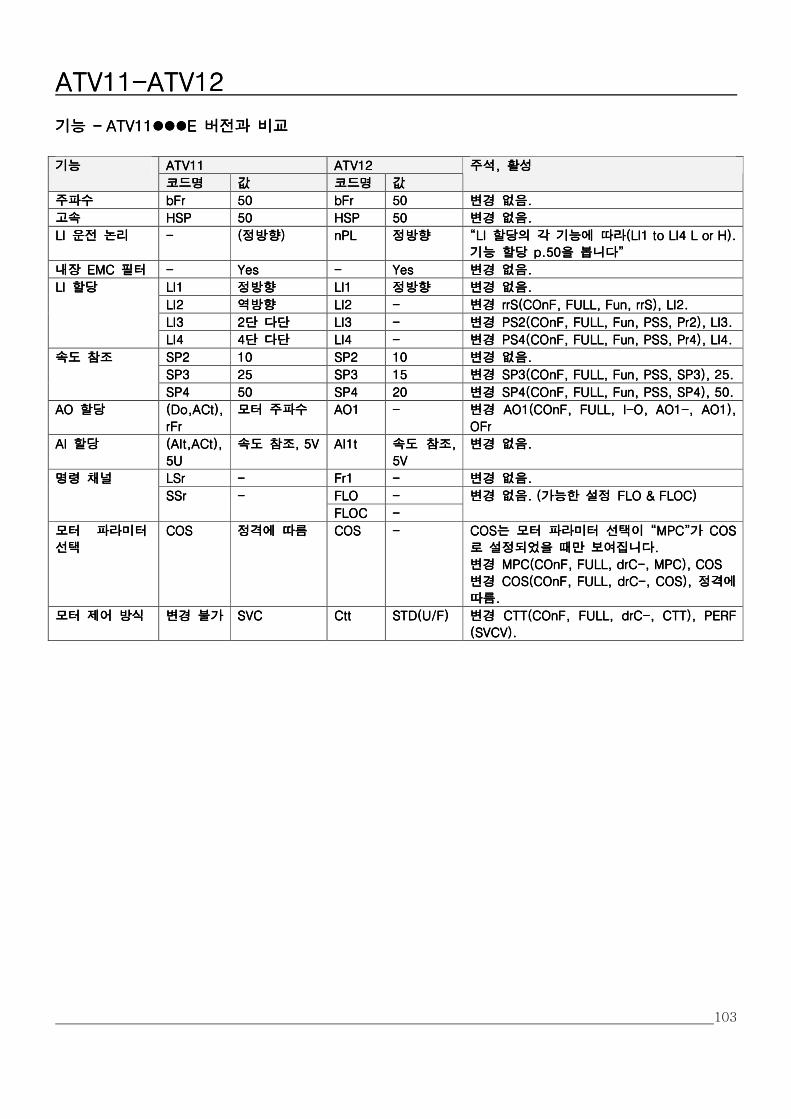
103
ATV11ATV11ATV11ATV11----ATV12ATV12ATV12ATV12
기능기능기능기능 –––– ATV11 ATV11 ATV11 ATV11E E E E 버전과버전과버전과버전과 비교비교비교비교
ATV11ATV11ATV11ATV11 ATV12ATV12ATV12ATV12 기능기능기능기능
코드명코드명코드명코드명 값값값값 코드명코드명코드명코드명 값값값값
주석주석주석주석, , , , 활성활성활성활성
주파수주파수주파수주파수 bFrbFrbFrbFr 50505050 bFrbFrbFrbFr 50505050 변경변경변경변경 없음없음없음없음....
고속고속고속고속 HSPHSPHSPHSP 50505050 HSPHSPHSPHSP 50505050 변경변경변경변경 없음없음없음없음....
LI LI LI LI 운전운전운전운전 논리논리논리논리 ---- ((((정방향정방향정방향정방향)))) nPLnPLnPLnPL 정방향정방향정방향정방향 ““““LI LI LI LI 할당할당할당할당의의의의 각각각각 기능에기능에기능에기능에 따라따라따라따라(LI1 to LI4 L or H). (LI1 to LI4 L or H). (LI1 to LI4 L or H). (LI1 to LI4 L or H).
기능기능기능기능 할당할당할당할당 p.50 p.50 p.50 p.50을을을을 봅니다봅니다봅니다봅니다””””
내장내장내장내장 EMC EMC EMC EMC 필터필터필터필터 ---- YesYesYesYes ---- YesYesYesYes 변경변경변경변경 없음없음없음없음....
LI1LI1LI1LI1 정방향정방향정방향정방향 LI1LI1LI1LI1 정방향정방향정방향정방향 변경변경변경변경 없음없음없음없음....
LI2LI2LI2LI2 역방향역방향역방향역방향 LI2LI2LI2LI2 ---- 변변변변경경경경 rrS(COnF, FULL, Fun, rrS), LI2. rrS(COnF, FULL, Fun, rrS), LI2. rrS(COnF, FULL, Fun, rrS), LI2. rrS(COnF, FULL, Fun, rrS), LI2.
LI3LI3LI3LI3 2222단단단단 다단다단다단다단 LI3LI3LI3LI3 ---- 변경변경변경변경 PS2(COnF, FULL, Fun, PSS, Pr2), LI3. PS2(COnF, FULL, Fun, PSS, Pr2), LI3. PS2(COnF, FULL, Fun, PSS, Pr2), LI3. PS2(COnF, FULL, Fun, PSS, Pr2), LI3.
LI LI LI LI 할당할당할당할당
LI4LI4LI4LI4 4444단단단단 다단다단다단다단 LI4LI4LI4LI4 ---- 변경변경변경변경 PS4(COnF, FULL, Fun, PSS, Pr4), LI4. PS4(COnF, FULL, Fun, PSS, Pr4), LI4. PS4(COnF, FULL, Fun, PSS, Pr4), LI4. PS4(COnF, FULL, Fun, PSS, Pr4), LI4.
SP2SP2SP2SP2 10101010 SP2SP2SP2SP2 10101010 변경변경변경변경 없음없음없음없음....
SP3SP3SP3SP3 25252525 SP3SP3SP3SP3 11115555 변경변경변경변경 SP3(COnF, FULL, Fun, PSS, SP3), 25. SP3(COnF, FULL, Fun, PSS, SP3), 25. SP3(COnF, FULL, Fun, PSS, SP3), 25. SP3(COnF, FULL, Fun, PSS, SP3), 25.
속도속도속도속도 참조참조참조참조
SP4SP4SP4SP4 50505050 SP4SP4SP4SP4 20202020 변경변경변경변경 SP4(COnF, FULL, Fun, PSS, SP4), 50. SP4(COnF, FULL, Fun, PSS, SP4), 50. SP4(COnF, FULL, Fun, PSS, SP4), 50. SP4(COnF, FULL, Fun, PSS, SP4), 50.
AO AO AO AO 할당할당할당할당 ((((DoDoDoDo,ACt), ,ACt), ,ACt), ,ACt),
rFrrFrrFrrFr
모터모터모터모터 주파수주파수주파수주파수 AO1AO1AO1AO1 ---- 변경변경변경변경 AO1(COnF, FULL, I AO1(COnF, FULL, I AO1(COnF, FULL, I AO1(COnF, FULL, I----O, AO1O, AO1O, AO1O, AO1----, AO1), , AO1), , AO1), , AO1),
OFrOFrOFrOFr
AI AI AI AI 할당할당할당할당 (AIt,ACt), (AIt,ACt), (AIt,ACt), (AIt,ACt),
5U5U5U5U
속도속도속도속도 참조참조참조참조, 5V, 5V, 5V, 5V AI1tAI1tAI1tAI1t 속도속도속도속도 참조참조참조참조, , , ,
5V5V5V5V
변경변경변경변경 없음없음없음없음....
LSrLSrLSrLSr ---- FrFrFrFr1111 ---- 변경변경변경변경 없음없음없음없음....
FLOFLOFLOFLO ----
명령명령명령명령 채널채널채널채널
SSrSSrSSrSSr ----
FLOCFLOCFLOCFLOC ----
변경변경변경변경 없음없음없음없음. (. (. (. (가능한가능한가능한가능한 설정설정설정설정 FLO & FLOC) FLO & FLOC) FLO & FLOC) FLO & FLOC)
모터모터모터모터 파라미터파라미터파라미터파라미터
선택선택선택선택
COSCOSCOSCOS 정격에정격에정격에정격에 따름따름따름따름 COSCOSCOSCOS ---- COSCOSCOSCOS는는는는 모터모터모터모터 파라미터파라미터파라미터파라미터 선택이선택이선택이선택이 ““““MPCMPCMPCMPC””””가가가가 COS COS COS COS
로로로로 설정되었을설정되었을설정되었을설정되었을 때만때만때만때만 보여집니다보여집니다보여집니다보여집니다....
변경변경변경변경 MPC(COnF, FULL, drC MPC(COnF, FULL, drC MPC(COnF, FULL, drC MPC(COnF, FULL, drC----, MPC), COS, MPC), COS, MPC), COS, MPC), COS
변경변경변경변경 COS(COnF, FULL, drC COS(COnF, FULL, drC COS(COnF, FULL, drC COS(COnF, FULL, drC----, COS), , COS), , COS), , COS), 정격에정격에정격에정격에
따름따름따름따름....
모터모터모터모터 제어제어제어제어 방식방식방식방식 변경변경변경변경 불가불가불가불가 SVCSVCSVCSVC CttCttCttCtt STD(U/F)STD(U/F)STD(U/F)STD(U/F) 변경변경변경변경 CTT(COnF CTT(COnF CTT(COnF CTT(COnF, FULL, drC, FULL, drC, FULL, drC, FULL, drC----, CTT), PERF , CTT), PERF , CTT), PERF , CTT), PERF
(SVCV).(SVCV).(SVCV).(SVCV).
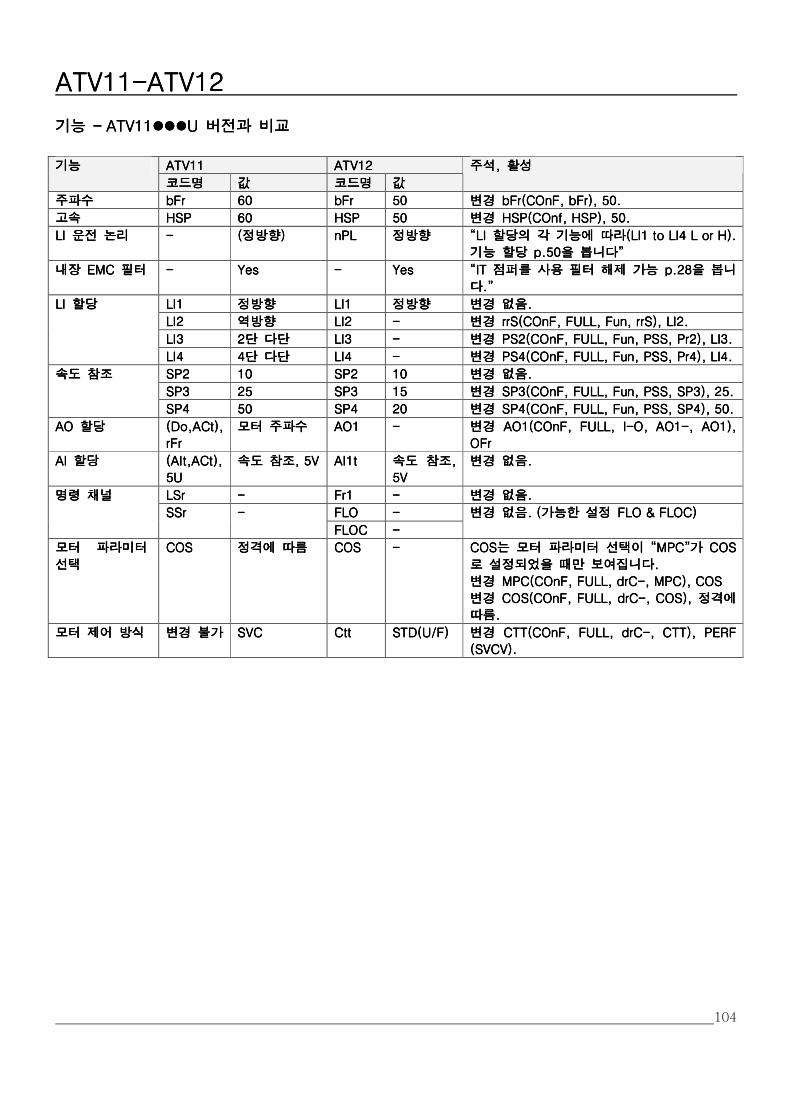
104
ATV11ATV11ATV11ATV11----ATV12ATV12ATV12ATV12
기능기능기능기능 –––– ATV11 ATV11 ATV11 ATV11UUUU 버전과버전과버전과버전과 비교비교비교비교
ATV11ATV11ATV11ATV11 ATV12ATV12ATV12ATV12 기능기능기능기능
코드명코드명코드명코드명 값값값값 코드명코드명코드명코드명 값값값값
주석주석주석주석, , , , 활성활성활성활성
주파수주파수주파수주파수 bFrbFrbFrbFr 60606060 bFrbFrbFrbFr 50505050 변경변경변경변경 bFr(COnF, bFr), 50. bFr(COnF, bFr), 50. bFr(COnF, bFr), 50. bFr(COnF, bFr), 50.
고속고속고속고속 HSPHSPHSPHSP 60606060 HSPHSPHSPHSP 50505050 변경변경변경변경 HSP(C HSP(C HSP(C HSP(COnfOnfOnfOnf, HSP), 50., HSP), 50., HSP), 50., HSP), 50.
LI LI LI LI 운전운전운전운전 논리논리논리논리 ---- ((((정방향정방향정방향정방향)))) nPLnPLnPLnPL 정방향정방향정방향정방향 ““““LI LI LI LI 할당할당할당할당의의의의 각각각각 기능에기능에기능에기능에 따라따라따라따라(LI1 to LI4 L or H)(LI1 to LI4 L or H)(LI1 to LI4 L or H)(LI1 to LI4 L or H). . . .
기능기능기능기능 할당할당할당할당 p.50 p.50 p.50 p.50을을을을 봅니다봅니다봅니다봅니다””””
내장내장내장내장 EMC EMC EMC EMC 필터필터필터필터 ---- YesYesYesYes ---- YesYesYesYes ““““IT IT IT IT 점퍼를점퍼를점퍼를점퍼를 사용사용사용사용 필터필터필터필터 해제해제해제해제 가가가가능능능능 p.28p.28p.28p.28을을을을 봅니봅니봅니봅니
다다다다....””””
LI1LI1LI1LI1 정방향정방향정방향정방향 LI1LI1LI1LI1 정방향정방향정방향정방향 변경변경변경변경 없음없음없음없음....
LI2LI2LI2LI2 역방향역방향역방향역방향 LI2LI2LI2LI2 ---- 변변변변경경경경 rrS(COnF, FULL, Fun, rrS), LI2. rrS(COnF, FULL, Fun, rrS), LI2. rrS(COnF, FULL, Fun, rrS), LI2. rrS(COnF, FULL, Fun, rrS), LI2.
LI3LI3LI3LI3 2222단단단단 다단다단다단다단 LI3LI3LI3LI3 ---- 변경변경변경변경 PS2(COnF, FULL, Fun, PSS, Pr2), LI3. PS2(COnF, FULL, Fun, PSS, Pr2), LI3. PS2(COnF, FULL, Fun, PSS, Pr2), LI3. PS2(COnF, FULL, Fun, PSS, Pr2), LI3.
LI LI LI LI 할당할당할당할당
LI4LI4LI4LI4 4444단단단단 다단다단다단다단 LI4LI4LI4LI4 ---- 변경변경변경변경 PS4(COnF, FULL, Fun, P PS4(COnF, FULL, Fun, P PS4(COnF, FULL, Fun, P PS4(COnF, FULL, Fun, PSS, Pr4), LI4.SS, Pr4), LI4.SS, Pr4), LI4.SS, Pr4), LI4.
SP2SP2SP2SP2 10101010 SP2SP2SP2SP2 10101010 변경변경변경변경 없음없음없음없음....
SP3SP3SP3SP3 25252525 SP3SP3SP3SP3 15151515 변경변경변경변경 SP3(COnF, FULL, Fun, PSS, SP3), 25. SP3(COnF, FULL, Fun, PSS, SP3), 25. SP3(COnF, FULL, Fun, PSS, SP3), 25. SP3(COnF, FULL, Fun, PSS, SP3), 25.
속도속도속도속도 참조참조참조참조
SP4SP4SP4SP4 50505050 SP4SP4SP4SP4 20202020 변경변경변경변경 SP4(COnF, FULL, Fun, PSS, SP4), 50. SP4(COnF, FULL, Fun, PSS, SP4), 50. SP4(COnF, FULL, Fun, PSS, SP4), 50. SP4(COnF, FULL, Fun, PSS, SP4), 50.
AO AO AO AO 할당할당할당할당 ((((DoDoDoDo,ACt), ,ACt), ,ACt), ,ACt),
rFrrFrrFrrFr
모터모터모터모터 주파수주파수주파수주파수 AO1AO1AO1AO1 ---- 변경변경변경변경 AO1(COnF, FULL, I AO1(COnF, FULL, I AO1(COnF, FULL, I AO1(COnF, FULL, I----O, AO1O, AO1O, AO1O, AO1----, AO1), , AO1), , AO1), , AO1),
OFrOFrOFrOFr
AI AI AI AI 할당할당할당할당 (AIt,ACt), (AIt,ACt), (AIt,ACt), (AIt,ACt),
5U5U5U5U
속도속도속도속도 참조참조참조참조, 5, 5, 5, 5VVVV AI1tAI1tAI1tAI1t 속도속도속도속도 참조참조참조참조, , , ,
5V5V5V5V
변경변경변경변경 없음없음없음없음....
LSrLSrLSrLSr ---- Fr1Fr1Fr1Fr1 ---- 변경변경변경변경 없음없음없음없음....
FLOFLOFLOFLO ----
명령명령명령명령 채널채널채널채널
SSrSSrSSrSSr ----
FLOCFLOCFLOCFLOC ----
변경변경변경변경 없음없음없음없음. (. (. (. (가능한가능한가능한가능한 설정설정설정설정 FLO & FLOC) FLO & FLOC) FLO & FLOC) FLO & FLOC)
모터모터모터모터 파라미터파라미터파라미터파라미터
선택선택선택선택
COSCOSCOSCOS 정격에정격에정격에정격에 따름따름따름따름 COSCOSCOSCOS ---- COSCOSCOSCOS는는는는 모터모터모터모터 파라미터파라미터파라미터파라미터 선택이선택이선택이선택이 ““““MPCMPCMPCMPC””””가가가가 COS COS COS COS
로로로로 설정되었을설정되었을설정되었을설정되었을 때만때만때만때만 보여집니다보여집니다보여집니다보여집니다....
변경변경변경변경 MPC(COnF, FULL, drC MPC(COnF, FULL, drC MPC(COnF, FULL, drC MPC(COnF, FULL, drC----, MPC), COS, MPC), COS, MPC), COS, MPC), COS
변경변경변경변경 COS(COnF, FULL, drC COS(COnF, FULL, drC COS(COnF, FULL, drC COS(COnF, FULL, drC----, COS), , COS), , COS), , COS), 정격에정격에정격에정격에
따름따름따름따름....
모터모터모터모터 제제제제어어어어 방식방식방식방식 변경변경변경변경 불가불가불가불가 SVCSVCSVCSVC CttCttCttCtt STD(U/F)STD(U/F)STD(U/F)STD(U/F) 변경변경변경변경 CTT(COnF, FULL, drC CTT(COnF, FULL, drC CTT(COnF, FULL, drC CTT(COnF, FULL, drC----, CTT), PERF , CTT), PERF , CTT), PERF , CTT), PERF
(SVCV).(SVCV).(SVCV).(SVCV).

105
ATV11ATV11ATV11ATV11----ATV12ATV12ATV12ATV12
기능기능기능기능 –––– ATV11 ATV11 ATV11 ATV11AAAA 버전과버전과버전과버전과 비교비교비교비교
ATV11ATV11ATV11ATV11 ATV12ATV12ATV12ATV12 기능기능기능기능
코드명코드명코드명코드명 값값값값 코드명코드명코드명코드명 값값값값
주석주석주석주석, , , , 활성활성활성활성
주파수주파수주파수주파수 bFrbFrbFrbFr 50505050 bFrbFrbFrbFr 50505050 변경변경변경변경 없음없음없음없음....
고속고속고속고속 HSPHSPHSPHSP 50505050 HSPHSPHSPHSP 50505050 변경변경변경변경 없음없음없음없음....
LI LI LI LI 운전운전운전운전 논리논리논리논리 ---- ((((정방향정방향정방향정방향)))) nPLnPLnPLnPL 정방향정방향정방향정방향 ““““LI LI LI LI 할당할당할당할당의의의의 각각각각 기능에기능에기능에기능에 따라따라따라따라(LI1 to LI4 (LI1 to LI4 (LI1 to LI4 (LI1 to LI4 L or H). L or H). L or H). L or H).
기능기능기능기능 할당할당할당할당 p.50 p.50 p.50 p.50을을을을 봅니다봅니다봅니다봅니다””””
내장내장내장내장 EMC EMC EMC EMC 필터필터필터필터 ---- NoNoNoNo ---- YesYesYesYes ““““IT IT IT IT 점퍼를점퍼를점퍼를점퍼를 사용사용사용사용 필터필터필터필터 해제해제해제해제 가가가가능능능능 p.28p.28p.28p.28을을을을 봅니봅니봅니봅니
다다다다....””””
LI1LI1LI1LI1 정방향정방향정방향정방향 LI1LI1LI1LI1 정방향정방향정방향정방향 변경변경변경변경 없음없음없음없음....
LI2LI2LI2LI2 역방향역방향역방향역방향 LI2LI2LI2LI2 ---- 변변변변경경경경 rrS(COnF, FULL, Fun, rrS), LI2. rrS(COnF, FULL, Fun, rrS), LI2. rrS(COnF, FULL, Fun, rrS), LI2. rrS(COnF, FULL, Fun, rrS), LI2.
LI3LI3LI3LI3 2222단단단단 다단다단다단다단 LI3LI3LI3LI3 ---- 변경변경변경변경 PS2(COnF, FULL, Fun, PSS, Pr2), LI3. PS2(COnF, FULL, Fun, PSS, Pr2), LI3. PS2(COnF, FULL, Fun, PSS, Pr2), LI3. PS2(COnF, FULL, Fun, PSS, Pr2), LI3.
LI LI LI LI 할당할당할당할당
LI4LI4LI4LI4 4444단단단단 다단다단다단다단 LI4LI4LI4LI4 ---- 변경변경변경변경 PS4(COnF, FULL, PS4(COnF, FULL, PS4(COnF, FULL, PS4(COnF, FULL, Fun, PSS, Pr4), LI4.Fun, PSS, Pr4), LI4.Fun, PSS, Pr4), LI4.Fun, PSS, Pr4), LI4.
SP2SP2SP2SP2 10101010 SP2SP2SP2SP2 10101010 변경변경변경변경 없음없음없음없음....
SP3SP3SP3SP3 25252525 SP3SP3SP3SP3 15151515 변경변경변경변경 SP3(COnF, FULL, Fun, PSS, SP3), 25. SP3(COnF, FULL, Fun, PSS, SP3), 25. SP3(COnF, FULL, Fun, PSS, SP3), 25. SP3(COnF, FULL, Fun, PSS, SP3), 25.
속도속도속도속도 참조참조참조참조
SP4SP4SP4SP4 50505050 SP4SP4SP4SP4 20202020 변경변경변경변경 SP4(COnF, FULL, Fun, PSS, SP4), 50. SP4(COnF, FULL, Fun, PSS, SP4), 50. SP4(COnF, FULL, Fun, PSS, SP4), 50. SP4(COnF, FULL, Fun, PSS, SP4), 50.
AO AO AO AO 할당할당할당할당 ((((DoDoDoDo,ACt), ,ACt), ,ACt), ,ACt),
rFrrFrrFrrFr
모터모터모터모터 주파수주파수주파수주파수 AO1AO1AO1AO1 ---- 변경변경변경변경 AO1(COnF, FULL, I AO1(COnF, FULL, I AO1(COnF, FULL, I AO1(COnF, FULL, I----O, AO1O, AO1O, AO1O, AO1----, AO1), , AO1), , AO1), , AO1),
OFrOFrOFrOFr
AI AI AI AI 할당할당할당할당 (AIt,ACt), (AIt,ACt), (AIt,ACt), (AIt,ACt),
5U5U5U5U
속도속도속도속도 참조참조참조참조, 5V, 5V, 5V, 5V AI1tAI1tAI1tAI1t 속도속도속도속도 참조참조참조참조, , , ,
5V5V5V5V
변경변경변경변경 없음없음없음없음....
LSrLSrLSrLSr LOCLOCLOCLOC Fr1Fr1Fr1Fr1 AI1AI1AI1AI1 변경변경변경변경 FR1(COnf, FULL, CtLFR1(COnf, FULL, CtLFR1(COnf, FULL, CtLFR1(COnf, FULL, CtL----, FR1), AIU1, FR1), AIU1, FR1), AIU1, FR1), AIU1....
FLOFLOFLOFLO SIMSIMSIMSIM
명령명령명령명령 채널채널채널채널
SSrSSrSSrSSr 로컬로컬로컬로컬 제어제어제어제어
(RUN/STOP)(RUN/STOP)(RUN/STOP)(RUN/STOP) FLOCFLOCFLOCFLOC ----
변경변경변경변경 없음없음없음없음....
모터모터모터모터 파라미터파라미터파라미터파라미터
선택선택선택선택
COSCOSCOSCOS 정격에정격에정격에정격에 따름따름따름따름 COSCOSCOSCOS ---- COSCOSCOSCOS는는는는 모터모터모터모터 파라미터파라미터파라미터파라미터 선택이선택이선택이선택이 ““““MPCMPCMPCMPC””””가가가가 COS COS COS COS
로로로로 설정되었을설정되었을설정되었을설정되었을 때만때만때만때만 보여집니다보여집니다보여집니다보여집니다....
변경변경변경변경 MPC(COnF, FULL, drC MPC(COnF, FULL, drC MPC(COnF, FULL, drC MPC(COnF, FULL, drC----, MPC), COS, MPC), COS, MPC), COS, MPC), COS
변경변경변경변경 COS( COS( COS( COS(COnF, FULL, drCCOnF, FULL, drCCOnF, FULL, drCCOnF, FULL, drC----, COS), , COS), , COS), , COS), 정격에정격에정격에정격에
따름따름따름따름....
모터모터모터모터 제어제어제어제어 방식방식방식방식 변경변경변경변경 불가불가불가불가 SVCSVCSVCSVC CttCttCttCtt STD(U/F)STD(U/F)STD(U/F)STD(U/F) 변경변경변경변경 CTT(COnF, FULL, drC CTT(COnF, FULL, drC CTT(COnF, FULL, drC CTT(COnF, FULL, drC----, CTT), PERF , CTT), PERF , CTT), PERF , CTT), PERF
(SVCV).(SVCV).(SVCV).(SVCV).

106
ATV11ATV11ATV11ATV11----ATV12ATV12ATV12ATV12
기능기능기능기능 –––– ATV11 ATV11 ATV11 ATV11E327E327E327E327 버전과버전과버전과버전과 비교비교비교비교
ATV11ATV11ATV11ATV11 ATV12ATV12ATV12ATV12 기능기능기능기능
코드명코드명코드명코드명 값값값값 코드명코드명코드명코드명 값값값값
주석주석주석주석, , , , 활성활성활성활성
주파수주파수주파수주파수 bFrbFrbFrbFr 50505050 bFrbFrbFrbFr 50505050 변경변경변경변경 없음없음없음없음....
고속고속고속고속 HSPHSPHSPHSP 50505050 HSPHSPHSPHSP 50505050 변경변경변경변경 없음없음없음없음....
LI LI LI LI 운전운전운전운전 논리논리논리논리 ---- ((((정정정정방향방향방향방향)))) nPLnPLnPLnPL 정방향정방향정방향정방향 ““““LI LI LI LI 할당할당할당할당의의의의 각각각각 기능에기능에기능에기능에 따라따라따라따라(LI1 to LI4 L or H). (LI1 to LI4 L or H). (LI1 to LI4 L or H). (LI1 to LI4 L or H).
기능기능기능기능 할당할당할당할당 p.50 p.50 p.50 p.50을을을을 봅니다봅니다봅니다봅니다””””
내장내장내장내장 EMC EMC EMC EMC 필터필터필터필터 ---- YesYesYesYes ---- YesYesYesYes ““““IT IT IT IT 점퍼를점퍼를점퍼를점퍼를 사용사용사용사용 필터필터필터필터 해제해제해제해제 가가가가능능능능 p.28p.28p.28p.28을을을을 봅니봅니봅니봅니
다다다다....””””
LI1LI1LI1LI1 정방향정방향정방향정방향 LI1LI1LI1LI1 정방향정방향정방향정방향 변경변경변경변경 없음없음없음없음....
LI2LI2LI2LI2 역방향역방향역방향역방향 LI2LI2LI2LI2 ---- 변변변변경경경경 rrS(COnF, FULL, Fun, rrS), LI2. rrS(COnF, FULL, Fun, rrS), LI2. rrS(COnF, FULL, Fun, rrS), LI2. rrS(COnF, FULL, Fun, rrS), LI2.
LI3LI3LI3LI3 2222단단단단 다단다단다단다단 LI3LI3LI3LI3 ---- 변경변경변경변경 PS2(COnF, FULL, Fun, PSS, Pr2), L PS2(COnF, FULL, Fun, PSS, Pr2), L PS2(COnF, FULL, Fun, PSS, Pr2), L PS2(COnF, FULL, Fun, PSS, Pr2), LI3.I3.I3.I3.
LI LI LI LI 할당할당할당할당
LI4LI4LI4LI4 4444단단단단 다단다단다단다단 LI4LI4LI4LI4 ---- 변경변경변경변경 PS4(COnF, FULL, Fun, PSS, Pr4), LI4. PS4(COnF, FULL, Fun, PSS, Pr4), LI4. PS4(COnF, FULL, Fun, PSS, Pr4), LI4. PS4(COnF, FULL, Fun, PSS, Pr4), LI4.
SP2SP2SP2SP2 10101010 SP2SP2SP2SP2 10101010 변경변경변경변경 없음없음없음없음....
SP3SP3SP3SP3 25252525 SP3SP3SP3SP3 15151515 변경변경변경변경 SP3(COnF, FULL, Fun, PSS, SP3), 25. SP3(COnF, FULL, Fun, PSS, SP3), 25. SP3(COnF, FULL, Fun, PSS, SP3), 25. SP3(COnF, FULL, Fun, PSS, SP3), 25.
속도속도속도속도 참조참조참조참조
SP4SP4SP4SP4 50505050 SP4SP4SP4SP4 20202020 변경변경변경변경 SP4(COnF, FULL, Fun, PSS, SP4), 50. SP4(COnF, FULL, Fun, PSS, SP4), 50. SP4(COnF, FULL, Fun, PSS, SP4), 50. SP4(COnF, FULL, Fun, PSS, SP4), 50.
AO AO AO AO 할당할당할당할당 ((((DoDoDoDo,ACt), ,ACt), ,ACt), ,ACt),
rFrrFrrFrrFr
모터모터모터모터 주파수주파수주파수주파수 AO1AO1AO1AO1 ---- 변경변경변경변경 AO1(COnF, FULL, I AO1(COnF, FULL, I AO1(COnF, FULL, I AO1(COnF, FULL, I----OOOO, AO1, AO1, AO1, AO1----, AO1), , AO1), , AO1), , AO1),
OFrOFrOFrOFr
AI AI AI AI 할당할당할당할당 (AIt,ACt), (AIt,ACt), (AIt,ACt), (AIt,ACt),
5U5U5U5U
속도속도속도속도 참조참조참조참조, 5V, 5V, 5V, 5V AI1tAI1tAI1tAI1t 속도속도속도속도 참조참조참조참조, , , ,
5V5V5V5V
변경변경변경변경 없음없음없음없음....
LSrLSrLSrLSr LOCLOCLOCLOC Fr1Fr1Fr1Fr1 AI1AI1AI1AI1 변경변경변경변경 FR1(COnf, FULL, CtL FR1(COnf, FULL, CtL FR1(COnf, FULL, CtL FR1(COnf, FULL, CtL----, FR1), AIU1., FR1), AIU1., FR1), AIU1., FR1), AIU1.
FLOFLOFLOFLO SIMSIMSIMSIM
명령명령명령명령 채널채널채널채널
SSrSSrSSrSSr 로컬로컬로컬로컬 제어제어제어제어
(RUN/STOP)(RUN/STOP)(RUN/STOP)(RUN/STOP) FLOCFLOCFLOCFLOC ----
변경변경변경변경 없음없음없음없음....
모터모터모터모터 파라미터파라미터파라미터파라미터
선택선택선택선택
COSCOSCOSCOS 정격에정격에정격에정격에 따름따름따름따름 COSCOSCOSCOS ---- COSCOSCOSCOS는는는는 모터모터모터모터 파라미터파라미터파라미터파라미터 선택이선택이선택이선택이 ““““MPCMPCMPCMPC””””가가가가 COS COS COS COS
로로로로 설정되었을설정되었을설정되었을설정되었을 때만때만때만때만 보여집니다보여집니다보여집니다보여집니다....
변변변변경경경경 MPC(COnF, FULL, drC MPC(COnF, FULL, drC MPC(COnF, FULL, drC MPC(COnF, FULL, drC----, MPC), COS, MPC), COS, MPC), COS, MPC), COS
변경변경변경변경 COS(COnF, FULL, drC COS(COnF, FULL, drC COS(COnF, FULL, drC COS(COnF, FULL, drC----, COS), , COS), , COS), , COS), 정격에정격에정격에정격에
따름따름따름따름....
모터모터모터모터 제어제어제어제어 방식방식방식방식 변경변경변경변경 불가불가불가불가 SVCSVCSVCSVC CttCttCttCtt STD(U/F)STD(U/F)STD(U/F)STD(U/F) 변경변경변경변경 CTT(COnF, FULL, drC CTT(COnF, FULL, drC CTT(COnF, FULL, drC CTT(COnF, FULL, drC----, CTT), PERF , CTT), PERF , CTT), PERF , CTT), PERF
(SVCV).(SVCV).(SVCV).(SVCV).

107
진단진단진단진단 및및및및 문제문제문제문제 해결해결해결해결
인버터가인버터가인버터가인버터가 시작되지시작되지시작되지시작되지 않고않고않고않고, , , , 오류오류오류오류 코드가코드가코드가코드가 표시되지표시되지표시되지표시되지 않는다않는다않는다않는다.... 표시창에 불빛이 들어오지 않으면, 인버터로의 전원은 점검합니다. (접지와 입력 상 연결, p.19)
“빠른 정지”나 “자유 회전” 기능을 할당하면 연관된 논리 입력에 전원이 들어오지 않은 경우, 인버터의 기동을
방해할 것입니다. ATV12는 자유 회전 정지에 nSt와 빠른 정지에 FSt를 표기하고, 이는 자유회전 정지에 rdy를
표시할 것입니다. 이는 기능이 제로 상태에서 활성화되는 일반적인 것이기 때문에, 인버터는 결선 브레이크가
있더라도 안전하게 정지될 것입니다. LI의 할당은 COnf/FULL/Fun-/Stt- 메뉴에서 점검합니다.
운전 명령 입력이 선택된 제어 모드(제어 형식 tCC(p.48)와 2선식 제어 tCt(p.51) 파라미터, COnf/FULL/I_O-
메뉴)를 따라서 실행되고 있는지 확인합니다.
참조 채널 혹은 명령 채널이 모드버스에 할당되었다면, 전원이 인가될 때, 인버터는 “nSt” 자유회전으로 표시
되어 있고, 통신 버스가 명령을 보낼 때까지 정지 상태로 남아 있습니다.
공장설정치에서 “RUN”버튼은 비활성화입니다. 참조 채널 1 Fr1(p.62)을 조정하고, 명령 채널 1 Cd1(p.61)롤
인버터를 자체적으로(COnf/FULL/CtL- 메뉴) 제어합니다. 인버터를 자체적으로 어떻게 제어하는지 p.45를 봅니
다.
자동으로자동으로자동으로자동으로 초기화되지초기화되지초기화되지초기화되지 않는않는않는않는 오류오류오류오류 감지감지감지감지 코드코드코드코드 전원을 끄고, 다시 켜서 초기화되기 전에 오류의 원인을 반드시 제거해야만 합니다.
SOF 와 tnF 오류는 논리 입력(감지된 오류 초기화 할당 rSF(p.77), COnf/FULL/FLT- 메뉴) 방법을 원격적으로
초기화 또한 가능합니다.
InFb, SOF 와 tnF 오류는 방지될 수 있고, 논리 입력(감지된 오류 방지 InH(p.81)) 방법을 원격적으로 제거할 수
있습니다.
코드코드코드코드 이름이름이름이름 가능한가능한가능한가능한 원인원인원인원인 조치조치조치조치
CrF1CrF1CrF1CrF1 선선선선 충전충전충전충전 충전충전충전충전 Relay Relay Relay Relay 제어제어제어제어 폴트나폴트나폴트나폴트나 충전충전충전충전
저항저항저항저항 손상손상손상손상
인버터를인버터를인버터를인버터를 Off Off Off Off하고하고하고하고, , , , 다시다시다시다시 On On On On
연결연결연결연결 상태상태상태상태 확인확인확인확인
전원전원전원전원 안정안정안정안정 확인확인확인확인
드라이브드라이브드라이브드라이브 점검점검점검점검////수리수리수리수리
InF1InF1InF1InF1 알려지지알려지지알려지지알려지지 않은않은않은않은 인버터인버터인버터인버터 용량용량용량용량 전원전원전원전원 카드가카드가카드가카드가 저장된저장된저장된저장된 카드와카드와카드와카드와
불일치불일치불일치불일치
드라이브드라이브드라이브드라이브 점검점검점검점검////수리수리수리수리
InF2InF2InF2InF2 알려지지알려지지알려지지알려지지 않거나않거나않거나않거나, , , , 적합하지적합하지적합하지적합하지
않은않은않은않은 전원전원전원전원 부부부부
전원전원전원전원 카드가카드가카드가카드가 제어제어제어제어 카드와카드와카드와카드와 부부부부
적합적합적합적합
드라이브드라이브드라이브드라이브 점검점검점검점검////수리수리수리수리
InF3InF3InF3InF3 내부내부내부내부 시리얼시리얼시리얼시리얼 링크링크링크링크 내부내부내부내부 카드간의카드간의카드간의카드간의 통신통신통신통신 오류오류오류오류 드라이브드라이브드라이브드라이브 점검점검점검점검////수리수리수리수리
InF4InF4InF4InF4 잘못된잘못된잘못된잘못된 산업화산업화산업화산업화 영역영역영역영역 내부내부내부내부 데이터데이터데이터데이터 불일치불일치불일치불일치 드라이브드라이브드라이브드라이브 점검점검점검점검////수리수리수리수리
InF9InF9InF9InF9 최근최근최근최근 측정측정측정측정 회로회로회로회로 실패실패실패실패 최근최근최근최근 측측측측정이정이정이정이 하드웨어하드웨어하드웨어하드웨어 회로와회로와회로와회로와
불일치불일치불일치불일치
드라이브드라이브드라이브드라이브 점검점검점검점검////수리수리수리수리
---------------- 장비장비장비장비 펌웨어펌웨어펌웨어펌웨어 문제문제문제문제 잘못된잘못된잘못된잘못된 장비장비장비장비 펌웨어펌웨어펌웨어펌웨어 업데이트업데이트업데이트업데이트
를를를를 멀티로더와멀티로더와멀티로더와멀티로더와 사용사용사용사용
제품의제품의제품의제품의 장비장비장비장비 펌웨어펌웨어펌웨어펌웨어 다시다시다시다시 확인확인확인확인
InFbInFbInFbInFb 내부내부내부내부 온도온도온도온도 센서센서센서센서 실패실패실패실패 인버터인버터인버터인버터 온도온도온도온도 센서가센서가센서가센서가 올바르게올바르게올바르게올바르게
작동하지작동하지작동하지작동하지 않음않음않음않음
인버터가인버터가인버터가인버터가 단단단단락이거나락이거나락이거나락이거나 열림열림열림열림
드라이브드라이브드라이브드라이브 점검점검점검점검////수리수리수리수리
InFEInFEInFEInFE 내부내부내부내부 CPU CPU CPU CPU 내부내부내부내부 마이크로프로세서마이크로프로세서마이크로프로세서마이크로프로세서 오류오류오류오류 인버터를인버터를인버터를인버터를 Off Off Off Off하고하고하고하고, , , , 다시다시다시다시 On On On On
드라이브드라이브드라이브드라이브 점검점검점검점검////수리수리수리수리
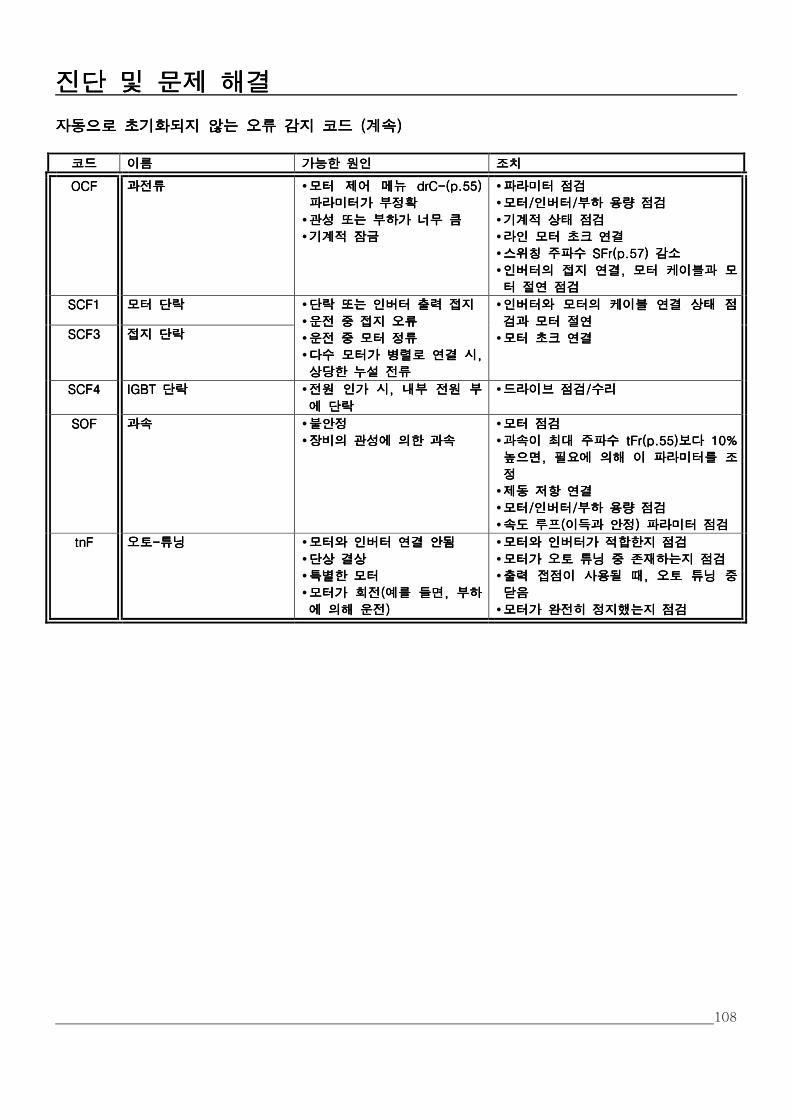
108
진단진단진단진단 및및및및 문제문제문제문제 해결해결해결해결
자동으로자동으로자동으로자동으로 초기화되지초기화되지초기화되지초기화되지 않는않는않는않는 오류오류오류오류 감지감지감지감지 코드코드코드코드 ( ( ( (계속계속계속계속))))
코드코드코드코드 이름이름이름이름 가능한가능한가능한가능한 원인원인원인원인 조치조치조치조치
OCFOCFOCFOCF 과전류과전류과전류과전류 모터모터모터모터 제어제어제어제어 메뉴메뉴메뉴메뉴 drC drC drC drC----(p.55) (p.55) (p.55) (p.55)
파라미터가파라미터가파라미터가파라미터가 부정확부정확부정확부정확
관성관성관성관성 또는또는또는또는 부하가부하가부하가부하가 너무너무너무너무 큼큼큼큼
기계적기계적기계적기계적 잠금잠금잠금잠금
파라미터파라미터파라미터파라미터 점검점검점검점검
모터모터모터모터////인버터인버터인버터인버터////부하부하부하부하 용량용량용량용량 점검점검점검점검
기계적기계적기계적기계적 상태상태상태상태 점검점검점검점검
라인라인라인라인 모터모터모터모터 초크초크초크초크 연결연결연결연결
스위칭스위칭스위칭스위칭 주파수주파수주파수주파수 SFr SFr SFr SFr(p.57) (p.57) (p.57) (p.57) 감소감소감소감소
인버터의인버터의인버터의인버터의 접지접지접지접지 연결연결연결연결, , , , 모터모터모터모터 케이블과케이블과케이블과케이블과 모모모모
터터터터 절연절연절연절연 점검점검점검점검
SCF1SCF1SCF1SCF1 모터모터모터모터 단락단락단락단락
SCF3SCF3SCF3SCF3 접지접지접지접지 단락단락단락단락
단락단락단락단락 또는또는또는또는 인버터인버터인버터인버터 출력출력출력출력 접지접지접지접지
운전운전운전운전 중중중중 접지접지접지접지 오류오류오류오류
운전운전운전운전 중중중중 모터모터모터모터 정류정류정류정류
다수다수다수다수 모터가모터가모터가모터가 병렬로병렬로병렬로병렬로 연결연결연결연결 시시시시, , , ,
상당한상당한상당한상당한 누설누설누설누설 전류전류전류전류
인버터와인버터와인버터와인버터와 모터의모터의모터의모터의 케이블케이블케이블케이블 연결연결연결연결 상태상태상태상태 점점점점
검과검과검과검과 모터모터모터모터 절연절연절연절연
모터모터모터모터 초크초크초크초크 연결연결연결연결
SCF4SCF4SCF4SCF4 IGBT IGBT IGBT IGBT 단락단락단락단락 전원전원전원전원 인가인가인가인가 시시시시, , , , 내부내부내부내부 전원전원전원전원 부부부부
에에에에 단락단락단락단락
드라이브드라이브드라이브드라이브 점검점검점검점검////수리수리수리수리
SOFSOFSOFSOF 과속과속과속과속 불안정불안정불안정불안정
장비의장비의장비의장비의 관성에관성에관성에관성에 의한의한의한의한 과속과속과속과속
모터모터모터모터 점검점검점검점검
과속이과속이과속이과속이 최대최대최대최대 주파수주파수주파수주파수 tFr(p.55) tFr(p.55) tFr(p.55) tFr(p.55)보다보다보다보다 10% 10% 10% 10%
높으면높으면높으면높으면, , , , 필요에필요에필요에필요에 의해의해의해의해 이이이이 파라미터를파라미터를파라미터를파라미터를 조조조조
정정정정
제동제동제동제동 저항저항저항저항 연결연결연결연결
모터모터모터모터////인버터인버터인버터인버터////부하부하부하부하 용량용량용량용량 점검점검점검점검
속도속도속도속도 루프루프루프루프((((이득과이득과이득과이득과 안정안정안정안정) ) ) ) 파라미터파라미터파라미터파라미터 점검점검점검점검
tnFtnFtnFtnF 오토오토오토오토----튜닝튜닝튜닝튜닝 모터와모터와모터와모터와 인버터인버터인버터인버터 연결연결연결연결 안됨안됨안됨안됨
단상단상단상단상 결상결상결상결상
특별한특별한특별한특별한 모터모터모터모터
모터가모터가모터가모터가 회전회전회전회전((((예를예를예를예를 들면들면들면들면, , , , 부하부하부하부하
에에에에 의해의해의해의해 운전운전운전운전))))
모터와모터와모터와모터와 인버터가인버터가인버터가인버터가 적합한지적합한지적합한지적합한지 점검점검점검점검
모터가모터가모터가모터가 오토오토오토오토 튜닝튜닝튜닝튜닝 중중중중 존재하는지존재하는지존재하는지존재하는지 점검점검점검점검
출력출력출력출력 접점이접점이접점이접점이 사용될사용될사용될사용될 때때때때, , , , 오토오토오토오토 튜닝튜닝튜닝튜닝 중중중중
닫음닫음닫음닫음
모터가모터가모터가모터가 완전히완전히완전히완전히 정지했는지정지했는지정지했는지정지했는지 점검점검점검점검

109
진단진단진단진단 및및및및 문제문제문제문제 해결해결해결해결
원인이원인이원인이원인이 제거된제거된제거된제거된 후후후후, , , , 자동자동자동자동 재시작재시작재시작재시작 기능으로기능으로기능으로기능으로 초기화가초기화가초기화가초기화가 가능한가능한가능한가능한 감지된감지된감지된감지된 오류오류오류오류 코드코드코드코드
이 오류들은 또한 논리 입력(파라미터 감지된 오류 초기화 할당 rSF, p.77)으로 전원을 켜고, 끄는 것으로 초기화
할 수 있습니다. OHF, OLF, OPF1, OPF2, OSF, SLF1, SLF2, SLF3와 tJF 오류들은 논리 입력(파라미터 감지된 오
류 방지 할당 InH, p.81)으로 금지하고, 원격적으로 복구시킬 수 있습니다.
코드코드코드코드 이름이름이름이름 가능한가능한가능한가능한 원인원인원인원인 조치조치조치조치
LFF1LFF1LFF1LFF1 아날로그아날로그아날로그아날로그 입입입입력력력력 전류전류전류전류 손실손실손실손실
오류오류오류오류
감지감지감지감지::::
아날로그아날로그아날로그아날로그 입력입력입력입력 AI1 AI1 AI1 AI1이이이이 전류로전류로전류로전류로
구성구성구성구성
AI1 0% AI1 0% AI1 0% AI1 0% 전류전류전류전류 범위범위범위범위 파라미터파라미터파라미터파라미터
CrLI(p.51)CrLI(p.51)CrLI(p.51)CrLI(p.51)가가가가 3mA 3mA 3mA 3mA보다보다보다보다 큼큼큼큼
아날로그아날로그아날로그아날로그 입력입력입력입력 전류가전류가전류가전류가 2mA 2mA 2mA 2mA
보다보다보다보다 작음작음작음작음....
접점접점접점접점 연결연결연결연결 확인확인확인확인
ObFObFObFObF 과도한과도한과도한과도한 제동제동제동제동 부하부하부하부하 너무너무너무너무 갑작스런갑작스런갑작스런갑작스런 제동제동제동제동 혹은혹은혹은혹은 구구구구
동동동동 부하가부하가부하가부하가 너무너무너무너무 높음높음높음높음
감속감속감속감속 시간을시간을시간을시간을 증가증가증가증가
필요필요필요필요 시시시시, , , , 제동제동제동제동 저항을저항을저항을저항을 설치설치설치설치
인가인가인가인가 전압을전압을전압을전압을 점검점검점검점검, , , , 최대최대최대최대 허용허용허용허용((((운전시운전시운전시운전시, , , ,
최대최대최대최대 인가인가인가인가 전압의전압의전압의전압의 20% 20% 20% 20%를를를를 초과초과초과초과) ) ) ) 아래로아래로아래로아래로
확인확인확인확인
OHFOHFOHFOHF 인버터인버터인버터인버터 과열과열과열과열 인버터인버터인버터인버터 온도가온도가온도가온도가 너무너무너무너무 높음높음높음높음 모터모터모터모터 부하부하부하부하, , , , 인버터인버터인버터인버터 환기와환기와환기와환기와 주변주변주변주변 온도온도온도온도 점점점점
검검검검. . . . 인버터를인버터를인버터를인버터를 재시작재시작재시작재시작 전에전에전에전에 온도를온도를온도를온도를 떨어떨어떨어떨어
지도록지도록지도록지도록 대기대기대기대기. . . . 설치와설치와설치와설치와 온도온도온도온도 상태상태상태상태((((p.13p.13p.13p.13) ) ) )
확인확인확인확인
OLCOLCOLCOLC 과정과정과정과정 과부하과부하과부하과부하 과정에서과정에서과정에서과정에서 과부하과부하과부하과부하 과정과과정과과정과과정과 상에상에상에상에 있는있는있는있는 인버터의인버터의인버터의인버터의 파라미터파라미터파라미터파라미터
점검점검점검점검
OLFOLFOLFOLF 모터모터모터모터 과부하과부하과부하과부하 과도한과도한과도한과도한 모터모터모터모터 전류로전류로전류로전류로 기동기동기동기동 모터모터모터모터 과열과열과열과열 보호보호보호보호 설정설정설정설정 점검점검점검점검, , , , 모터모터모터모터 부하부하부하부하
점검점검점검점검....
OPF1OPF1OPF1OPF1 1 1 1 1 출력출력출력출력 결상결상결상결상 인버터인버터인버터인버터 출력출력출력출력 상에서상에서상에서상에서 한한한한 상을상을상을상을
손실손실손실손실
인버터로부터인버터로부터인버터로부터인버터로부터 모터로의모터로의모터로의모터로의 연결연결연결연결 점검점검점검점검
하단에하단에하단에하단에 컨택터를컨택터를컨택터를컨택터를 사용하는사용하는사용하는사용하는 경우경우경우경우, , , , 연결연결연결연결
상태상태상태상태, , , , 케이블과케이블과케이블과케이블과 컨택터컨택터컨택터컨택터 점검점검점검점검
OPF2OPF2OPF2OPF2 3 3 3 3 출력출력출력출력 결결결결상상상상 모터가모터가모터가모터가 연결연결연결연결 안됨안됨안됨안됨
모터모터모터모터 전력이전력이전력이전력이 너무너무너무너무 낮음낮음낮음낮음, , , , 인인인인버버버버
터터터터 정격정격정격정격 전류의전류의전류의전류의 6% 6% 6% 6%보다보다보다보다 낮음낮음낮음낮음
출력출력출력출력 컨택터컨택터컨택터컨택터 개방개방개방개방
모터모터모터모터 전류의전류의전류의전류의 순간적인순간적인순간적인순간적인 불안정불안정불안정불안정
인버터로부터인버터로부터인버터로부터인버터로부터 모터로의모터로의모터로의모터로의 연결연결연결연결 점검점검점검점검
전력이전력이전력이전력이 낮은낮은낮은낮은 모터나모터나모터나모터나 모터모터모터모터 없이없이없이없이 실험실험실험실험: : : : 공공공공
장장장장 설정치설정치설정치설정치 상태는상태는상태는상태는, , , , 모터모터모터모터 결상결상결상결상 감지가감지가감지가감지가 활활활활
성성성성 출력출력출력출력 결상결상결상결상 감지감지감지감지 OPL(p.80)=YES. OPL(p.80)=YES. OPL(p.80)=YES. OPL(p.80)=YES. 테테테테
스트나스트나스트나스트나 유지유지유지유지 환경에서환경에서환경에서환경에서 인버터인버터인버터인버터 점검점검점검점검, , , , 인인인인
버터버터버터버터 정격과정격과정격과정격과 같은같은같은같은 모터를모터를모터를모터를 사용하지사용하지사용하지사용하지 않않않않
음음음음, , , , 모터모터모터모터 결상결상결상결상 감지감지감지감지 비활성비활성비활성비활성 출력출력출력출력 결상결상결상결상
감지감지감지감지 OPL=nO OPL=nO OPL=nO OPL=nO
다음의다음의다음의다음의 파라미터를파라미터를파라미터를파라미터를 점검점검점검점검 최적화최적화최적화최적화: : : : IR IR IR IR 보보보보
상상상상 (U/F) UFr(p.56), (U/F) UFr(p.56), (U/F) UFr(p.56), (U/F) UFr(p.56), 모터모터모터모터 정격정격정격정격 전압전압전압전압
UnS(p.55), UnS(p.55), UnS(p.55), UnS(p.55), 모터모터모터모터 정격정격정격정격 전류전류전류전류 nCr(p.55) nCr(p.55) nCr(p.55) nCr(p.55)
와와와와 오토오토오토오토 튜닝튜닝튜닝튜닝 tUn(p.58) tUn(p.58) tUn(p.58) tUn(p.58) 실행실행실행실행....
OSFOSFOSFOSF 과전압과전압과전압과전압 인가인가인가인가 전압이전압이전압이전압이 너무너무너무너무 높음높음높음높음::::
---- 인버터에인버터에인버터에인버터에 전원만전원만전원만전원만 인가시인가시인가시인가시, , , ,
공급이공급이공급이공급이 최대최대최대최대 허용허용허용허용 전압전압전압전압 레레레레
벨을벨을벨을벨을 10% 10% 10% 10% 초과초과초과초과
---- 전원에전원에전원에전원에 운전운전운전운전 명령명령명령명령 없이없이없이없이, , , , 최최최최
대대대대 인가인가인가인가 전원이전원이전원이전원이 20% 20% 20% 20% 초과초과초과초과
인가인가인가인가 전압전압전압전압 방해방해방해방해
인가인가인가인가 전압전압전압전압 점검점검점검점검

110
진단진단진단진단 및및및및 문제문제문제문제 해결해결해결해결
원인이원인이원인이원인이 제거된제거된제거된제거된 후후후후, , , , 자동자동자동자동 재시작재시작재시작재시작 기능으로기능으로기능으로기능으로 초기화가초기화가초기화가초기화가 가능한가능한가능한가능한 감지된감지된감지된감지된 오류오류오류오류 코드코드코드코드((((계속계속계속계속))))
코드코드코드코드 이름이름이름이름 가능한가능한가능한가능한 원인원인원인원인 조치조치조치조치
PHFPHFPHFPHF 입력입력입력입력 결상결상결상결상 인버터에인버터에인버터에인버터에 부정확한부정확한부정확한부정확한 공급공급공급공급 또는또는또는또는
퓨즈퓨즈퓨즈퓨즈 손상손상손상손상
1 1 1 1 상상상상 결상결상결상결상
3333상상상상 ATV12 ATV12 ATV12 ATV12을을을을 단상단상단상단상 전원에전원에전원에전원에 연연연연
결해서결해서결해서결해서 사용사용사용사용
부하부하부하부하 불균형불균형불균형불균형
인버터가인버터가인버터가인버터가 부하와부하와부하와부하와 연결시에만연결시에만연결시에만연결시에만
보호보호보호보호
전원전원전원전원 연결과연결과연결과연결과 퓨즈퓨즈퓨즈퓨즈 확인확인확인확인
3333상상상상 전원전원전원전원 사용사용사용사용
입력입력입력입력 결상결상결상결상 IPL(p.80)=nO IPL(p.80)=nO IPL(p.80)=nO IPL(p.80)=nO로로로로 설정하여설정하여설정하여설정하여, , , ,
오류오류오류오류 기능을기능을기능을기능을 비활성비활성비활성비활성
SCFSSCFSSCFSSCFS 부하부하부하부하 단락단락단락단락 인버터인버터인버터인버터 출력출력출력출력 단락단락단락단락
파라미터파라미터파라미터파라미터 IGBT IGBT IGBT IGBT 테스트테스트테스트테스트
Strt(p.81)= YESStrt(p.81)= YESStrt(p.81)= YESStrt(p.81)= YES에서에서에서에서, , , , 운전운전운전운전
명령명령명령명령 또는또는또는또는 DC DC DC DC 인가인가인가인가 명령에서명령에서명령에서명령에서
단락단락단락단락 감지감지감지감지
인버터로부터인버터로부터인버터로부터인버터로부터 모터모터모터모터로의로의로의로의 케이블과케이블과케이블과케이블과 모터모터모터모터
의의의의 절연절연절연절연 상태상태상태상태 점검점검점검점검
SLF1SLF1SLF1SLF1 모드버스모드버스모드버스모드버스 통신통신통신통신 모드버스모드버스모드버스모드버스 네트워크에서네트워크에서네트워크에서네트워크에서 통신통신통신통신
방해방해방해방해
통신통신통신통신 버스버스버스버스 연결연결연결연결 점검점검점검점검
시간시간시간시간 초과초과초과초과((((모드버스모드버스모드버스모드버스 시간시간시간시간 초과초과초과초과 ttO ttO ttO ttO 파라파라파라파라
미터미터미터미터 p.83) p.83) p.83) p.83) 점검점검점검점검
모드버스모드버스모드버스모드버스 유저유저유저유저 매뉴얼매뉴얼매뉴얼매뉴얼 참고참고참고참고
SLF2SLF2SLF2SLF2 SoMove SoMove SoMove SoMove 통신통신통신통신 SoMoveSoMoveSoMoveSoMove와와와와 통신통신통신통신 오류오류오류오류 SoMove SoMove SoMove SoMove 연결연결연결연결 케이블케이블케이블케이블 점검점검점검점검
시간시간시간시간 초과초과초과초과 점검점검점검점검
SLF3SLF3SLF3SLF3 HMI HMI HMI HMI 통신통신통신통신 외부외부외부외부 표시표시표시표시 터미널과터미널과터미널과터미널과 통신통신통신통신 오오오오
류류류류
터미널터미널터미널터미널 연결연결연결연결 점검점검점검점검
ULFULFULFULF 부족부족부족부족 부하부하부하부하 오류오류오류오류 과정에서과정에서과정에서과정에서 부족부하부족부하부족부하부족부하
모터모터모터모터 전류가전류가전류가전류가 어플리케이션어플리케이션어플리케이션어플리케이션 부부부부
족부하족부하족부하족부하 시간시간시간시간 지연지연지연지연 ULt(p.53) ULt(p.53) ULt(p.53) ULt(p.53)
으로으로으로으로 설정된설정된설정된설정된 시간시간시간시간 중에중에중에중에 어플어플어플어플
리케이션리케이션리케이션리케이션 부족부하부족부하부족부하부족부하 임계값임계값임계값임계값
LUL(p.53)LUL(p.53)LUL(p.53)LUL(p.53)보다보다보다보다 적을적을적을적을 때때때때, , , , 어플어플어플어플
리케이션을리케이션을리케이션을리케이션을 보호보호보호보호
과정과과정과과정과과정과 인버터인버터인버터인버터 상의상의상의상의 파라미터파라미터파라미터파라미터 점검점검점검점검
tJFtJFtJFtJF IGBT IGBT IGBT IGBT 과열과열과열과열 인버터인버터인버터인버터 과열과열과열과열
IGBT IGBT IGBT IGBT 외부외부외부외부 온도가온도가온도가온도가 환경온도환경온도환경온도환경온도
와와와와 부하보다부하보다부하보다부하보다 너무너무너무너무 높음높음높음높음
부하부하부하부하////모터모터모터모터////인버터인버터인버터인버터 용량용량용량용량 확인확인확인확인
스위칭스위칭스위칭스위칭 주파수주파수주파수주파수 SFr(p.57) SFr(p.57) SFr(p.57) SFr(p.57) 감소감소감소감소
재시작재시작재시작재시작 전전전전 인버터가인버터가인버터가인버터가 식을식을식을식을 때까지때까지때까지때까지 대기대기대기대기

111
진단진단진단진단 및및및및 문제문제문제문제 해결해결해결해결
원인이원인이원인이원인이 사라지면사라지면사라지면사라지면, , , , 초기화가초기화가초기화가초기화가 되는되는되는되는 오류오류오류오류 코드코드코드코드
USF 오류는 논리 입력(파라미터 감지된 오류 방지 할당 InH, p.81)으로 금지하고, 원격적으로 복구시킬 수 있습
니다.
코드코드코드코드 이름이름이름이름 가능한가능한가능한가능한 원인원인원인원인 조치조치조치조치
CFFCFFCFFCFF 부적절한부적절한부적절한부적절한 구성구성구성구성 HMI HMI HMI HMI 블록을블록을블록을블록을 다른다른다른다른 용량의용량의용량의용량의 인인인인
버터에버터에버터에버터에 있는있는있는있는 HMI HMI HMI HMI 블록블록블록블록 구성구성구성구성
으로으로으로으로 대체대체대체대체
소비자의소비자의소비자의소비자의 파라미터파라미터파라미터파라미터 전류전류전류전류 구성구성구성구성
이이이이 일관되지일관되지일관되지일관되지 않음않음않음않음
공장공장공장공장 설정치로설정치로설정치로설정치로 되돌리거나되돌리거나되돌리거나되돌리거나 백업백업백업백업 구성을구성을구성을구성을
재검색재검색재검색재검색
공장공장공장공장 설정치로설정치로설정치로설정치로 되돌린되돌린되돌린되돌린 후에도후에도후에도후에도 오류가오류가오류가오류가
남아있다면남아있다면남아있다면남아있다면, , , , 슈나이더슈나이더슈나이더슈나이더 직원을직원을직원을직원을 접선접선접선접선
CFICFICFICFI
(1)
잘못된잘못된잘못된잘못된 구성구성구성구성 잘못된잘못된잘못된잘못된 구성구성구성구성. . . . 버스나버스나버스나버스나 통신통신통신통신 네네네네
크워크를크워크를크워크를크워크를 통한통한통한통한 인버터인버터인버터인버터 구성구성구성구성
로딩이로딩이로딩이로딩이 일관되지일관되지일관되지일관되지 않음않음않음않음. . . . 업로업로업로업로
드드드드 구성이구성이구성이구성이 방해받거나방해받거나방해받거나방해받거나 완전히완전히완전히완전히
끝나지끝나지끝나지끝나지 않음않음않음않음
이전에이전에이전에이전에 로딩한로딩한로딩한로딩한 구성구성구성구성 점검점검점검점검
적절한적절한적절한적절한 구성구성구성구성 로딩로딩로딩로딩
CFI2CFI2CFI2CFI2 잘못된잘못된잘못된잘못된 구성구성구성구성 다운로드다운로드다운로드다운로드 로더나로더나로더나로더나 SoMove SoMove SoMove SoMove를를를를 통한통한통한통한 다운다운다운다운
로드로드로드로드 운전운전운전운전 방해방해방해방해
로더나로더나로더나로더나 SoMove SoMove SoMove SoMove 연결연결연결연결 점검점검점검점검
다운로드다운로드다운로드다운로드 운전을운전을운전을운전을 기본기본기본기본 재시작으로재시작으로재시작으로재시작으로 초기초기초기초기
화화화화 하거나하거나하거나하거나 공장공장공장공장 설정치를설정치를설정치를설정치를 재저장재저장재저장재저장
USFUSFUSFUSF 부족부족부족부족 전압전압전압전압 공급공급공급공급 전압전압전압전압 너무너무너무너무 낮음낮음낮음낮음
순간순간순간순간 전압전압전압전압 하강하강하강하강
전압과전압과전압과전압과 파라미터파라미터파라미터파라미터 부족부족부족부족 전압전압전압전압 오류오류오류오류 관리관리관리관리
USb(p.81) USb(p.81) USb(p.81) USb(p.81) 점검점검점검점검
(1) CFI가 과거 오류 메뉴에 있다면, 이는 구성이 방해되었거나 완전히 끝나지 않은 상태라는 뜻이다.
HMI HMI HMI HMI 블록블록블록블록 변경변경변경변경 HMI 블록을 다른 용량의 인버터에 있는 HMI 블록 구성으로 대체하면, 인버터는 부적정확 구성 CFF 오류 상태로
전원 인가시, 잠깁니다. 카드가 고의적으로 변경된 거라면, 오류는 ENT키를 두 번 눌러서 복구시킬 수 있으며,
모든모든모든모든 공장공장공장공장 설정치로설정치로설정치로설정치로 재저장재저장재저장재저장합니다.
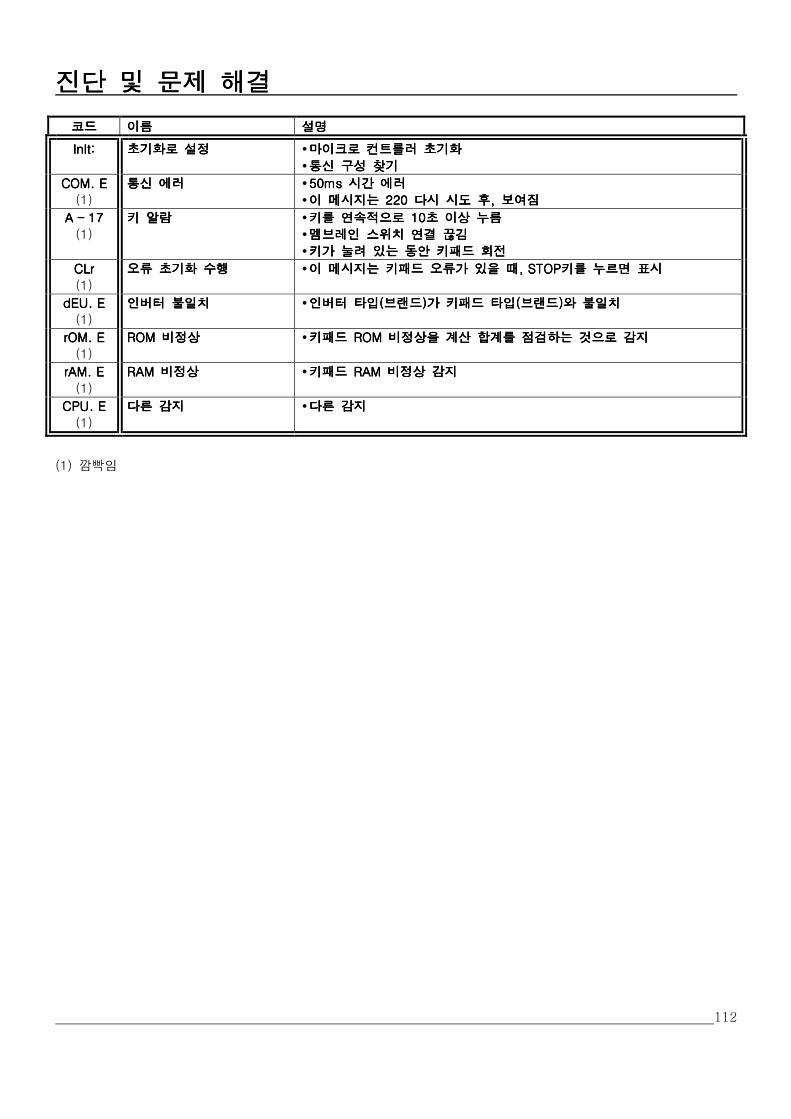
112
진단진단진단진단 및및및및 문제문제문제문제 해결해결해결해결
코드코드코드코드 이름이름이름이름 설명설명설명설명
InIt:InIt:InIt:InIt: 초기화로초기화로초기화로초기화로 설정설정설정설정 마이크로마이크로마이크로마이크로 컨트롤러컨트롤러컨트롤러컨트롤러 초기화초기화초기화초기화
통신통신통신통신 구성구성구성구성 찾기찾기찾기찾기
CCCCOM. EOM. EOM. EOM. E
(1)
통신통신통신통신 에러에러에러에러 50ms 50ms 50ms 50ms 시간시간시간시간 에러에러에러에러
이이이이 메시지는메시지는메시지는메시지는 220 220 220 220 다시다시다시다시 시도시도시도시도 후후후후, , , , 보여짐보여짐보여짐보여짐
A A A A –––– 17 17 17 17
(1)
키키키키 알람알람알람알람 키를키를키를키를 연속적으로연속적으로연속적으로연속적으로 10 10 10 10초초초초 이상이상이상이상 누름누름누름누름
멤브레인멤브레인멤브레인멤브레인 스위치스위치스위치스위치 연결연결연결연결 끊김끊김끊김끊김
키가키가키가키가 눌려눌려눌려눌려 있는있는있는있는 동안동안동안동안 키패드키패드키패드키패드 회전회전회전회전
CCCCLrLrLrLr
(1)
오류오류오류오류 초기화초기화초기화초기화 수행수행수행수행 이이이이 메시지는메시지는메시지는메시지는 키패드키패드키패드키패드 오류가오류가오류가오류가 있을있을있을있을 때때때때, STOP, STOP, STOP, STOP키를키를키를키를 누르면누르면누르면누르면 표시표시표시표시
dEU. EdEU. EdEU. EdEU. E
(1)
인버터인버터인버터인버터 불일치불일치불일치불일치 인버터인버터인버터인버터 타입타입타입타입((((브랜드브랜드브랜드브랜드))))가가가가 키패드키패드키패드키패드 타입타입타입타입((((브랜드브랜드브랜드브랜드))))와와와와 불일치불일치불일치불일치
rOM. ErOM. ErOM. ErOM. E
(1)
ROM ROM ROM ROM 비정상비정상비정상비정상 키패드키패드키패드키패드 ROM ROM ROM ROM 비정비정비정비정상을상을상을상을 계산계산계산계산 합계를합계를합계를합계를 점검하는점검하는점검하는점검하는 것으로것으로것으로것으로 감지감지감지감지
rAM. ErAM. ErAM. ErAM. E
(1)
RAM RAM RAM RAM 비정상비정상비정상비정상 키패드키패드키패드키패드 RAM RAM RAM RAM 비정상비정상비정상비정상 감지감지감지감지
CPU. ECPU. ECPU. ECPU. E
(1)
다른다른다른다른 감지감지감지감지 다른다른다른다른 감지감지감지감지
(1) 깜빡임

113
적용적용적용적용 주의주의주의주의
2 2 2 2 선식선식선식선식 제어제어제어제어((((ssssource)ource)ource)ource)
(a) 정방향 운전 (b) 역방향 운전
3 3 3 3 결선결선결선결선 제어제어제어제어((((ssssink)ink)ink)ink)
(a) 정방향 운전
1.1.1.1. 접지 터미널을 출력 터미널 아래에 위치한 접지 나사에 연결.
2.2.2.2. 전원 터미널 연결.
3.3.3.3. 논리 입력 연결.
4.4.4.4. 운전 명령을 주지 않고 인버터 전원 켜기.
5.5.5.5. 인버터에 공장 설정치 지정, 공장 설정치/사용자 파라미터 설정
FCS(p.45)를 InI로 설정.
6.6.6.6. 모터 파라미터들(COnF 모드)을 인버터의 공장 설정치가 적합하지
않는다면 설정.
7.7.7.7. 오토 튜닝 실행
8.8.8.8. 역방향 rrS(p.64)를 LI2H로 설정
9.9.9.9. Start
1.1.1.1. 접지 터미널을 출력 터미널 아래에 위치한 접지 나사에 연결.
2.2.2.2. 전원 터미널 연결.
3.3.3.3. 논리 입력 연결.
4.4.4.4. 운전 명령을 주지 않고 인버터 전원 켜기.
5.5.5.5. 인버터에 공장 설정치 지정, 공장 설정치/사용자 파라미터 설정
FCS(p.45)를 InI로 설정.
6.6.6.6. tCC를 3C로 설정(p.47).
7.7.7.7. 모터 파라미터들(COnF 모드)을 인버터의 공장 설정치가 적합하지
않는다면 설정.
8.8.8.8. 오토 튜닝 실행.
9.9.9.9. 논리 입력 방식 nPL(p.50)을 nEG로 설정.
10.10.10.10. Start
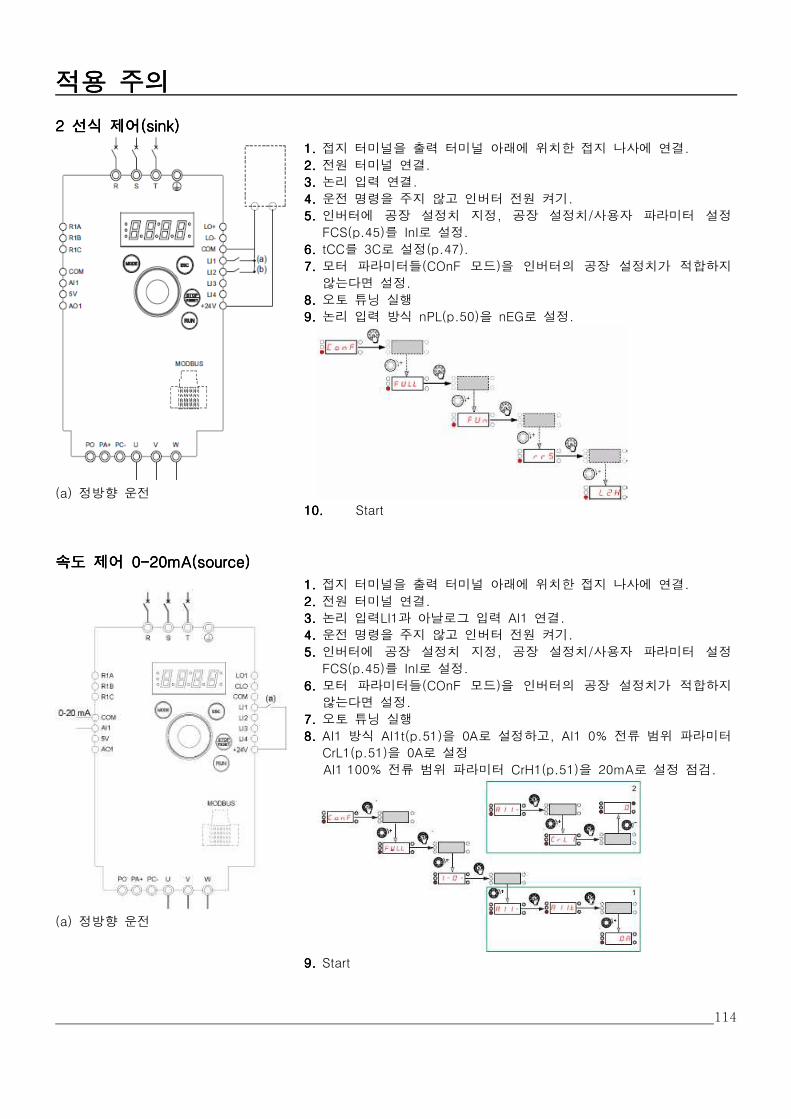
114
적용적용적용적용 주의주의주의주의
2 2 2 2 선식선식선식선식 제어제어제어제어((((ssssinkinkinkink))))
(a) 정방향 운전
속도속도속도속도 제어제어제어제어 0 0 0 0----20mA(source)20mA(source)20mA(source)20mA(source)
(a) 정방향 운전
1.1.1.1. 접지 터미널을 출력 터미널 아래에 위치한 접지 나사에 연결.
2.2.2.2. 전원 터미널 연결.
3.3.3.3. 논리 입력 연결.
4.4.4.4. 운전 명령을 주지 않고 인버터 전원 켜기.
5.5.5.5. 인버터에 공장 설정치 지정, 공장 설정치/사용자 파라미터 설정
FCS(p.45)를 InI로 설정.
6.6.6.6. tCC를 3C로 설정(p.47).
7.7.7.7. 모터 파라미터들(COnF 모드)을 인버터의 공장 설정치가 적합하지
않는다면 설정.
8.8.8.8. 오토 튜닝 실행
9.9.9.9. 논리 입력 방식 nPL(p.50)을 nEG로 설정.
10.10.10.10. Start
1.1.1.1. 접지 터미널을 출력 터미널 아래에 위치한 접지 나사에 연결.
2.2.2.2. 전원 터미널 연결.
3.3.3.3. 논리 입력LI1과 아날로그 입력 AI1 연결.
4.4.4.4. 운전 명령을 주지 않고 인버터 전원 켜기.
5.5.5.5. 인버터에 공장 설정치 지정, 공장 설정치/사용자 파라미터 설정
FCS(p.45)를 InI로 설정.
6.6.6.6. 모터 파라미터들(COnF 모드)을 인버터의 공장 설정치가 적합하지
않는다면 설정.
7.7.7.7. 오토 튜닝 실행
8.8.8.8. AI1 방식 AI1t(p.51)을 0A로 설정하고, AI1 0% 전류 범위 파라미터
CrL1(p.51)을 0A로 설정
AI1 100% 전류 범위 파라미터 CrH1(p.51)을 20mA로 설정 점검.
9.9.9.9. Start

115
적용적용적용적용 주의주의주의주의
4444단단단단 다단다단다단다단 속도속도속도속도(source)(source)(source)(source)
중요중요중요중요: : : : 기능 호환성 표(p.35)를 참고해 주세요.
1.1.1.1. 접지 터미널을 출력 터미널 아래에 위치한 접지 나사에 연결.
2.2.2.2. 전원 터미널 연결.
3.3.3.3. 논리 입력 연결.
4.4.4.4. 운전 명령을 주지 않고 인버터 전원 켜기.
5.5.5.5. 인버터에 공장 설정치 지정, 공장 설정치/사용자 파라미터 설정
FCS(p.45)를 InI로 설정.
6.6.6.6. 모터 파라미터들(COnF 모드)을 인버터의 공장 설정치가 적합하지 않는
다면 설정.
7.7.7.7. 오토 튜닝 실행.
8.8.8.8. 2 다단 속도 PS2(p.68)을 L2H로 설정.
다단 속도 2 SP2(p.68)를 20Hz로 설정.
4 다단 속도 PS4(p.68)를 L3H로 설정.
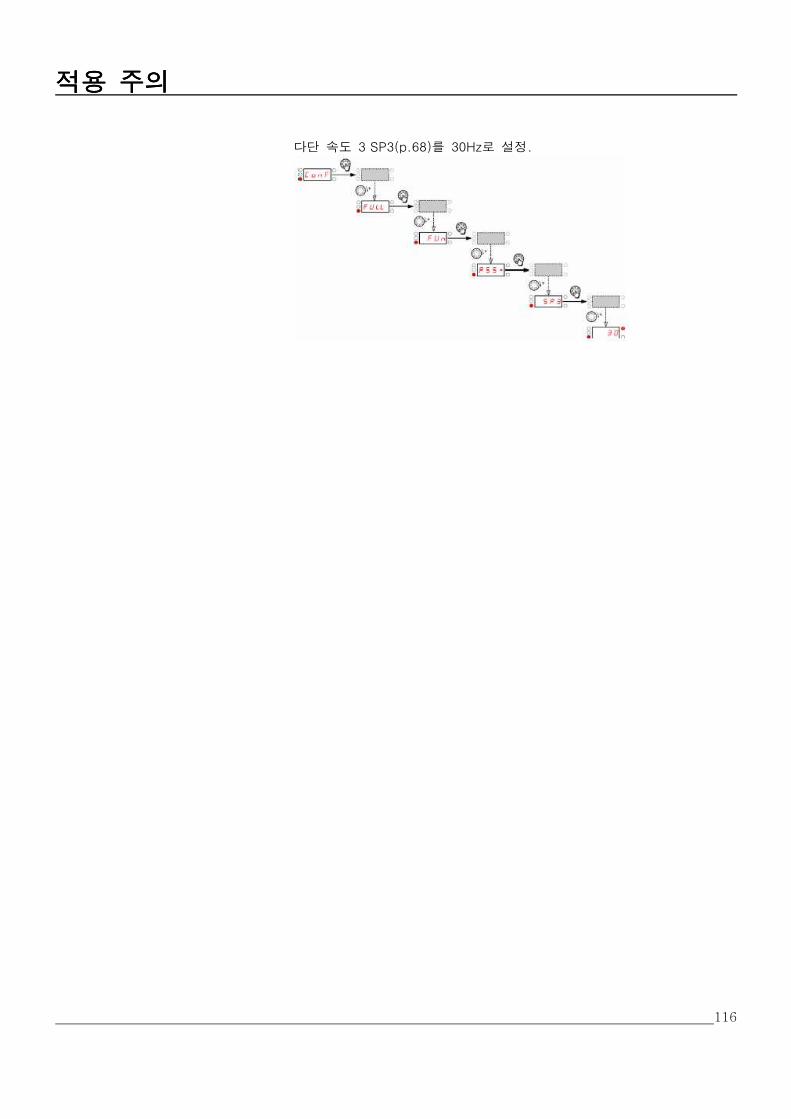
116
적용적용적용적용 주의주의주의주의
다단 속도 3 SP3(p.68)를 30Hz로 설정.

117
적용적용적용적용 주의주의주의주의
4444단단단단 다단다단다단다단 속도속도속도속도(source)(source)(source)(source) 계속
다단 속도 4 SP4(p.68)를 40Hz로 설정.
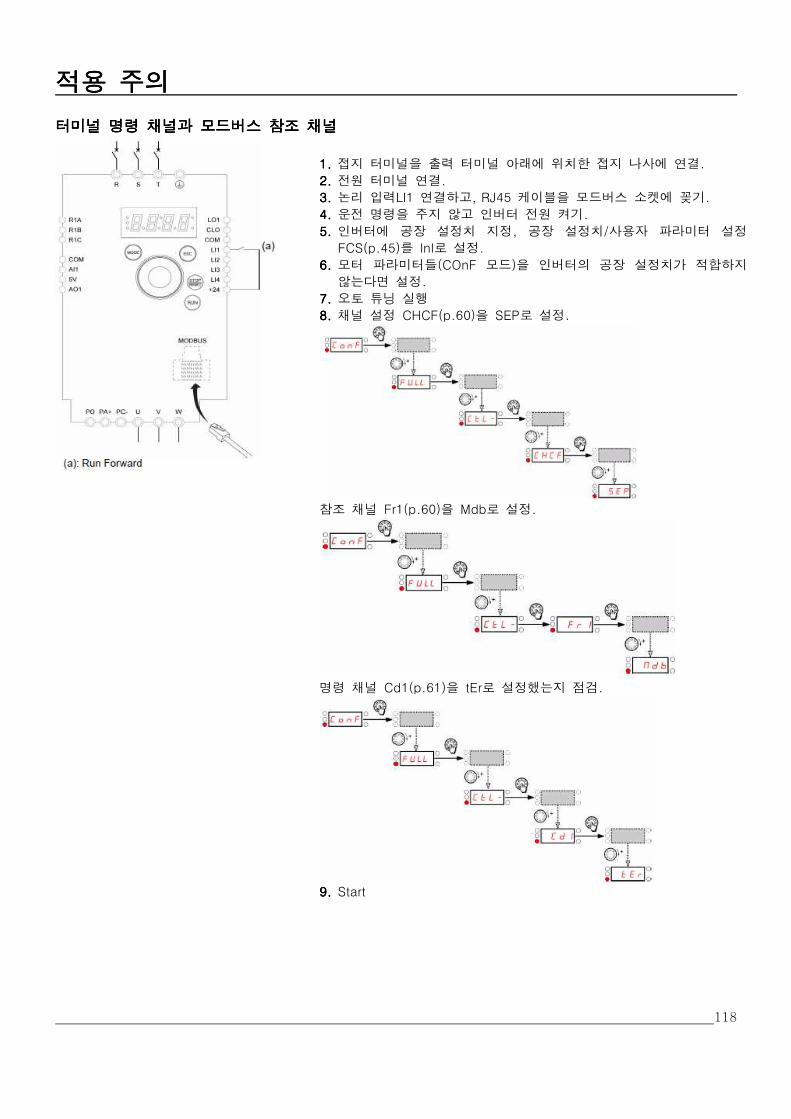
118
적용적용적용적용 주의주의주의주의
터미널터미널터미널터미널 명령명령명령명령 채널과채널과채널과채널과 모드버스모드버스모드버스모드버스 참조참조참조참조 채널채널채널채널
1.1.1.1. 접지 터미널을 출력 터미널 아래에 위치한 접지 나사에 연결.
2.2.2.2. 전원 터미널 연결.
3.3.3.3. 논리 입력LI1 연결하고, RJ45 케이블을 모드버스 소켓에 꽂기.
4.4.4.4. 운전 명령을 주지 않고 인버터 전원 켜기.
5.5.5.5. 인버터에 공장 설정치 지정, 공장 설정치/사용자 파라미터 설정
FCS(p.45)를 InI로 설정.
6.6.6.6. 모터 파라미터들(COnF 모드)을 인버터의 공장 설정치가 적합하지
않는다면 설정.
7.7.7.7. 오토 튜닝 실행
8.8.8.8. 채널 설정 CHCF(p.60)을 SEP로 설정.
참조 채널 Fr1(p.60)을 Mdb로 설정.
명령 채널 Cd1(p.61)을 tEr로 설정했는지 점검.
9.9.9.9. Start
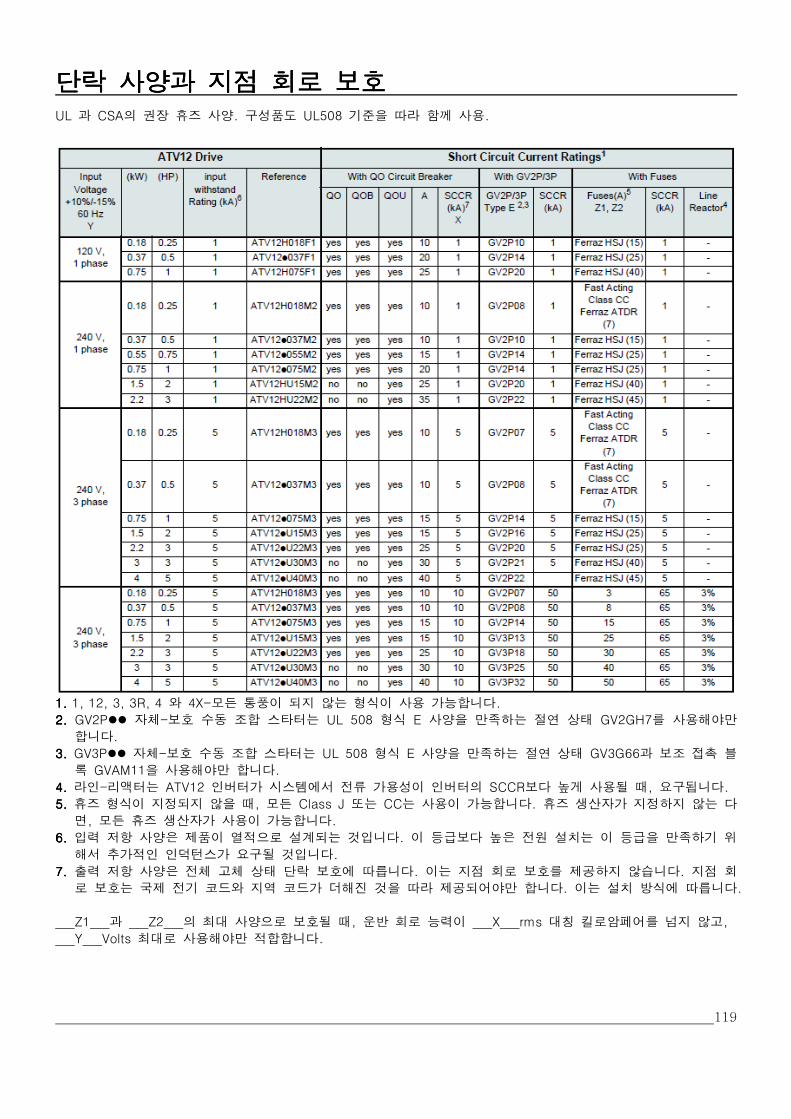
119
단락단락단락단락 사양과사양과사양과사양과 지점지점지점지점 회로회로회로회로 보호보호보호보호
UL 과 CSA의 권장 휴즈 사양. 구성품도 UL508 기준을 따라 함께 사용.
1.1.1.1. 1, 12, 3, 3R, 4 와 4X-모든 통풍이 되지 않는 형식이 사용 가능합니다.
2.2.2.2. GV2P 자체-보호 수동 조합 스타터는 UL 508 형식 E 사양을 만족하는 절연 상태 GV2GH7를 사용해야만
합니다.
3.3.3.3. GV3P 자체-보호 수동 조합 스타터는 UL 508 형식 E 사양을 만족하는 절연 상태 GV3G66과 보조 접촉 블
록 GVAM11을 사용해야만 합니다.
4.4.4.4. 라인-리액터는 ATV12 인버터가 시스템에서 전류 가용성이 인버터의 SCCR보다 높게 사용될 때, 요구됩니다.
5.5.5.5. 휴즈 형식이 지정되지 않을 때, 모든 Class J 또는 CC는 사용이 가능합니다. 휴즈 생산자가 지정하지 않는 다
면, 모든 휴즈 생산자가 사용이 가능합니다.
6.6.6.6. 입력 저항 사양은 제품이 열적으로 설계되는 것입니다. 이 등급보다 높은 전원 설치는 이 등급을 만족하기 위
해서 추가적인 인덕턴스가 요구될 것입니다.
7.7.7.7. 출력 저항 사양은 전체 고체 상태 단락 보호에 따릅니다. 이는 지점 회로 보호를 제공하지 않습니다. 지점 회
로 보호는 국제 전기 코드와 지역 코드가 더해진 것을 따라 제공되어야만 합니다. 이는 설치 방식에 따릅니다.
Z1 과 Z2 의 최대 사양으로 보호될 때, 운반 회로 능력이 X rms 대칭 킬로암페어를 넘지 않고,
Y Volts 최대로 사용해야만 적합합니다.

120
결선결선결선결선
단상 전원으로, 단상 입력 어플리케이션을 위한 GV2P와 GV3P를 수동 자체-보호 조합 스타터를 사용할 때, 스타
터로의 결선은 다음 그림과 같이:

121
구성구성구성구성 표표표표
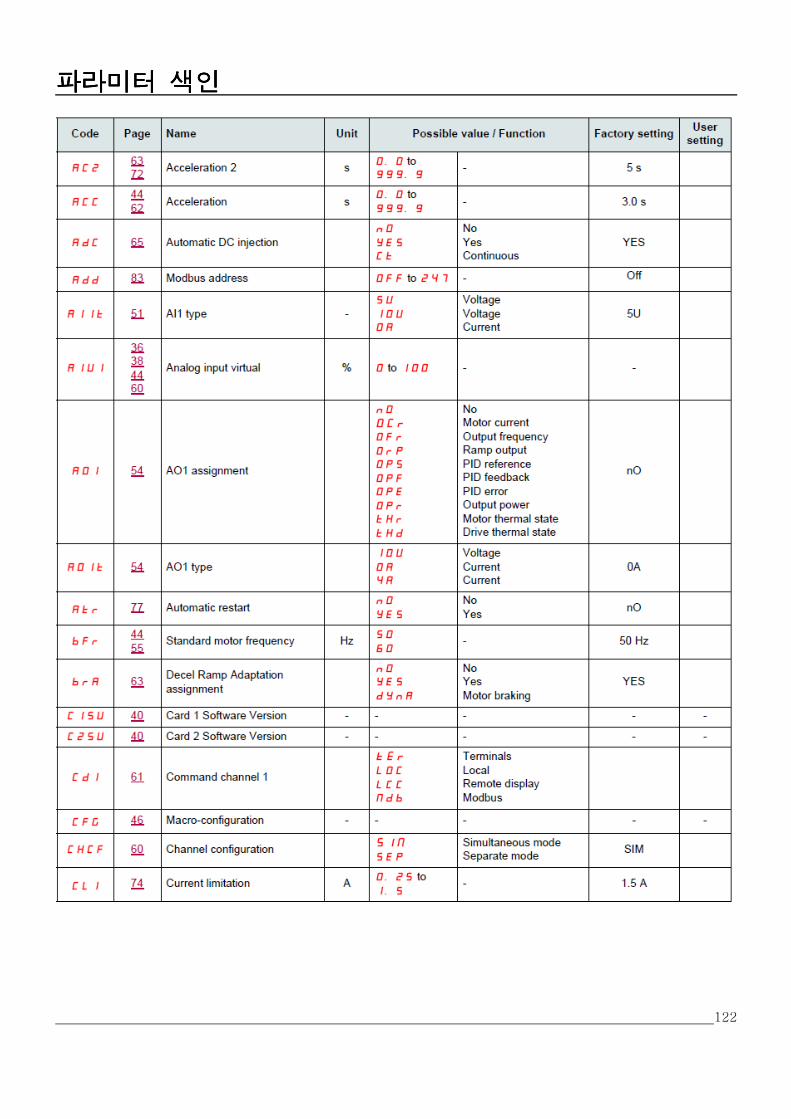
122
파라미터파라미터파라미터파라미터 색인색인색인색인

123
파라미터파라미터파라미터파라미터 색인색인색인색인
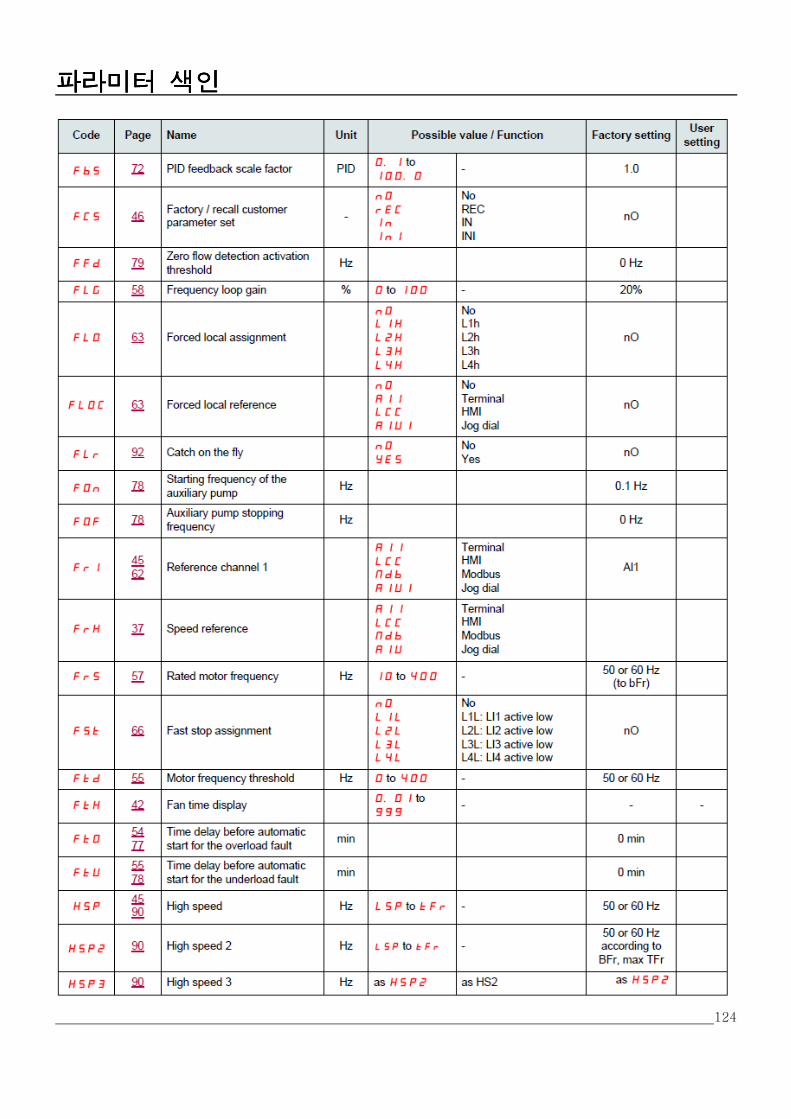
124
파라미터파라미터파라미터파라미터 색인색인색인색인

125
파라미터파라미터파라미터파라미터 색인색인색인색인

126
파라미터파라미터파라미터파라미터 색인색인색인색인

127
파라미터파라미터파라미터파라미터 색인색인색인색인
(1) In = 인버터 정격 전류

128
파라미터파라미터파라미터파라미터 색인색인색인색인

129
파라미터파라미터파라미터파라미터 색인색인색인색인
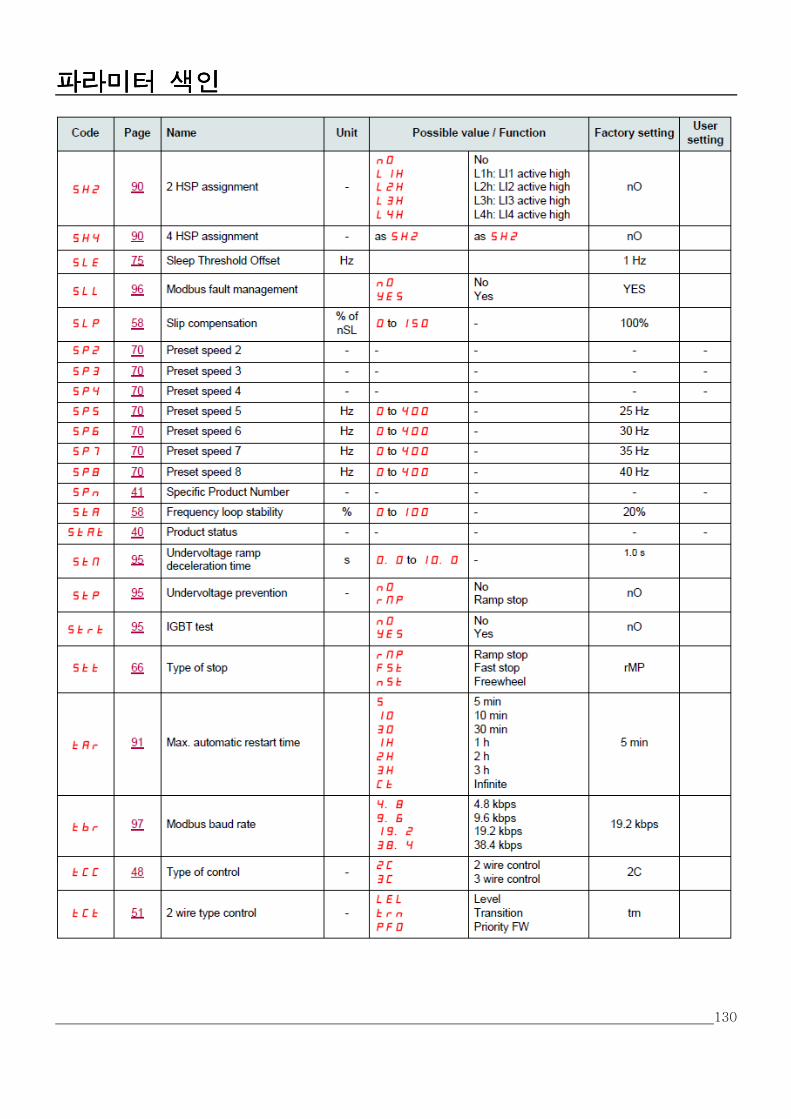
130
파라미터파라미터파라미터파라미터 색인색인색인색인

131
파라미터파라미터파라미터파라미터 색인색인색인색인

132

133