70409330 mehanizacija i tehnologija pretovara
TRANSCRIPT
1
U N I V E R Z I T E T U N O V O M S A D U
FAKULTET TEHNIčKIH NAUKA
Prof. dr ing. Milosav S. GEORGIJEVIĆ
MEHANIZACIJA I TEHNOLOGIJA PRETOVARA
Prvi deo
(deo predavanja prema programu)
Logistika tokova materijala, kapacitet pretovara i izbor pogonsih klasa, sredstva i ureñaji za prenošenje tereta, elementi mašina i ureñaja za pretovar
Novi Sad, 2003.
2
Predgovor Pisanije koje čitaoc ima pred sobom predsavlja veći deo materije predvi|ene nastavnm programom za prvi semestar predmeta Mehanizacija i tehnologija pretovara, koji slučaju studenti Saobraćajnog odseka na Fakultetu tehničkih nauka Univerziteta u Novom Sadu. S obzirom na sveprisutnu globalizaciju sveta, organizovanje tokova roba ili logistika ima presudnu ulogu u racionalizacijama svi vrsta. Pošto su tokovi roba (materijala) nezamislive bez pretovara u lukama i kopnenim terminalima svih vrsta (železničkim, aerodromskim, robno-transportnim centrima itd.), proizilazi da su pretovarne radnje sa robom izuzetno važne, jer pored cene koja se meri vremenom pretovara (brzinom pretovara) mogu uticati i na kvalitet u transpornom lancu, jer oštećena roba koju dobije krajni korisnik je obezvreñena i sav prethodni trud je uzaludan. Prva poglavlja su posvećena logistici tokova materijala − roba i simulacijama tokova u terminalima, u kjima su mašine za pretovar varijable, kao i njene tehničke performanse. Potom se proučava način odreñivanja kapaciteta pretovara i svrstavanje mašina za pretovar u tkzv. pogonske klase na osnovu uslova rada. Pošto je manipulacija robama nezamisliva bez odgovarajućeg alata, ovom problemu je posvećeno naredno poglavlje. Dalje se daju elemnti mašina za pretovar sa njihovim osnovnim karakteristikama i napomenama na koje korisnik pri izboru i eksploataciji mora da vodi računa. Delovi vezani za pretovarnu i transportnu opremu u paletnim skladištima opisani su u knjizi Regalna skladišta, pa se stoga navode poglavlja od značaja za čitaoca. O mašinama za pretovar kontenera još 1991. godine napisana je knjiga Pretovar kontenera, koja nažalost još nije izašla iz štampe, pa se stoga daju na kraju samu neke od slika u prilogu. Osnovni moto pri pisanju bila je mudrost J.Jovanovića Zmaja
Nije znanje, znanje znati, već je znanje, znanje dati.
Takoñe se čitalac podseća i na filosofiju istraživanja i razvoja osnivača Hitačija, Namihei Odaire
3
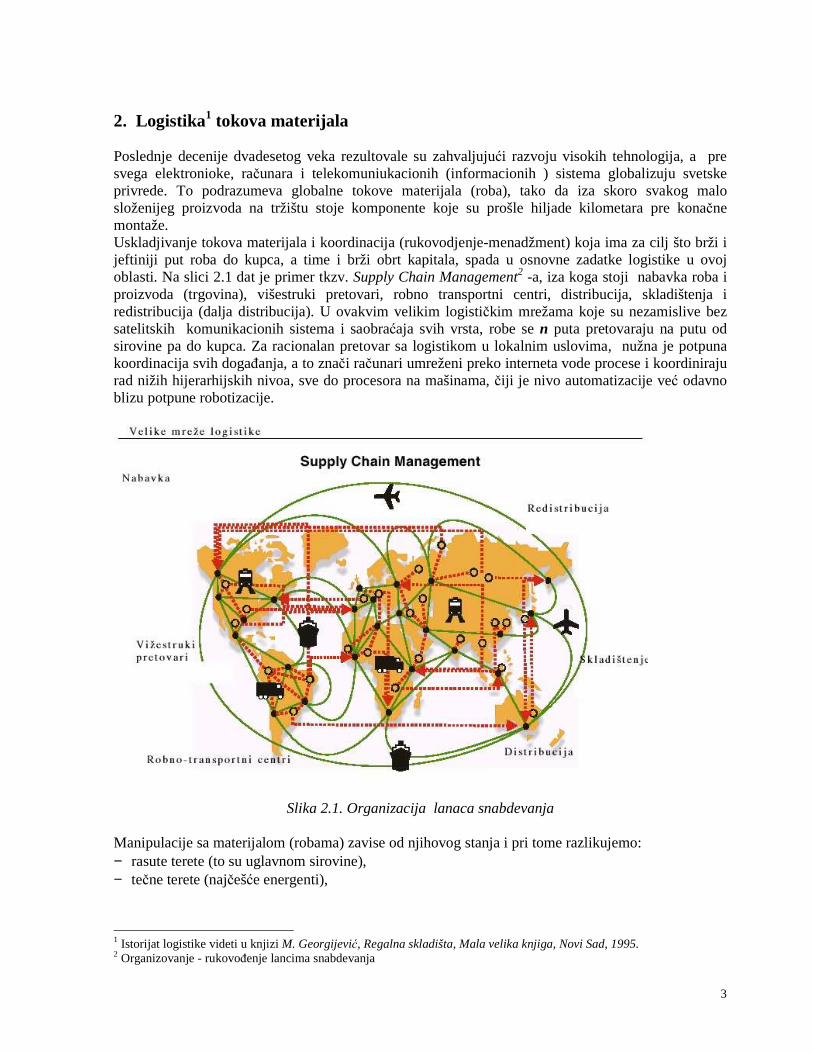
2. Logistika1 tokova materijala Poslednje decenije dvadesetog veka rezultovale su zahvaljujući razvoju visokih tehnologija, a pre svega elektronioke, računara i telekomuniukacionih (informacionih ) sistema globalizuju svetske privrede. To podrazumeva globalne tokove materijala (roba), tako da iza skoro svakog malo složenijeg proizvoda na tržištu stoje komponente koje su prošle hiljade kilometara pre konačne montaže. Uskladjivanje tokova materijala i koordinacija (rukovodjenje-menadžment) koja ima za cilj što brži i jeftiniji put roba do kupca, a time i brži obrt kapitala, spada u osnovne zadatke logistike u ovoj oblasti. Na slici 2.1 dat je primer tkzv. Supply Chain Management2 -a, iza koga stoji nabavka roba i proizvoda (trgovina), višestruki pretovari, robno transportni centri, distribucija, skladištenja i redistribucija (dalja distribucija). U ovakvim velikim logističkim mrežama koje su nezamislive bez satelitskih komunikacionih sistema i saobraćaja svih vrsta, robe se n puta pretovaraju na putu od sirovine pa do kupca. Za racionalan pretovar sa logistikom u lokalnim uslovima, nužna je potpuna koordinacija svih dogañanja, a to znači računari umreženi preko interneta vode procese i koordiniraju rad nižih hijerarhijskih nivoa, sve do procesora na mašinama, čiji je nivo automatizacije već odavno blizu potpune robotizacije.
Slika 2.1. Organizacija lanaca snabdevanja
Manipulacije sa materijalom (robama) zavise od njihovog stanja i pri tome razlikujemo: − rasute terete (to su uglavnom sirovine), − tečne terete (najčešće energenti),
1 Istorijat logistike videti u knjizi M. Georgijević, Regalna skladišta, Mala velika knjiga, Novi Sad, 1995. 2 Organizovanje - rukovoñenje lancima snabdevanja
4
− komadne terete koji su u preko 90% slučajeva paletizovani, tj. za prekomorske transporte kontenerizovani i
− komadne terete preko kontenerskih dimenzija, kao što su delovi konstrukcija i opreme koji se transaportuju i pretovaraju pod posebnim uslovima.
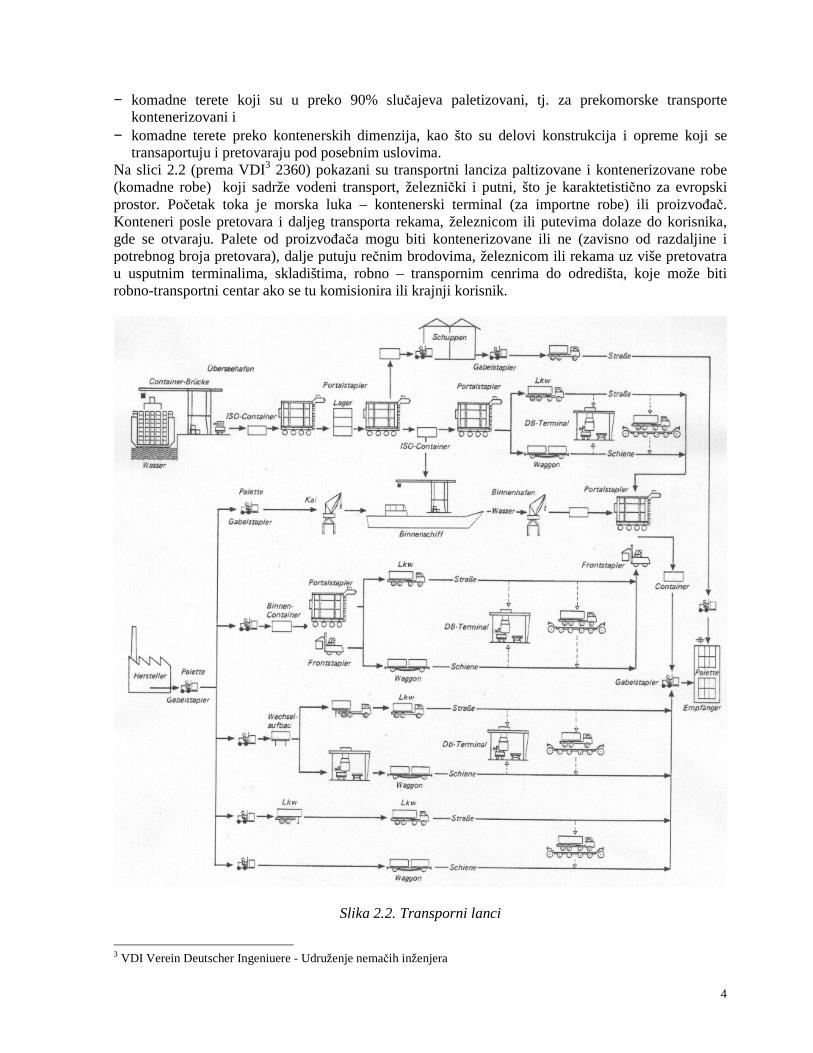
Na slici 2.2 (prema VDI3 2360) pokazani su transportni lanciza paltizovane i kontenerizovane robe (komadne robe) koji sadrže vodeni transport, železnički i putni, što je karaktetistično za evropski prostor. Početak toka je morska luka – kontenerski terminal (za importne robe) ili proizvoñač. Konteneri posle pretovara i daljeg transporta rekama, železnicom ili putevima dolaze do korisnika, gde se otvaraju. Palete od proizvoñača mogu biti kontenerizovane ili ne (zavisno od razdaljine i potrebnog broja pretovara), dalje putuju rečnim brodovima, železnicom ili rekama uz više pretovatra u usputnim terminalima, skladištima, robno – transpornim cenrima do odredišta, koje može biti robno-transportni centar ako se tu komisionira ili krajnji korisnik.
Slika 2.2. Transporni lanci 3 VDI Verein Deutscher Ingeniuere - Udruženje nemačih inženjera
5
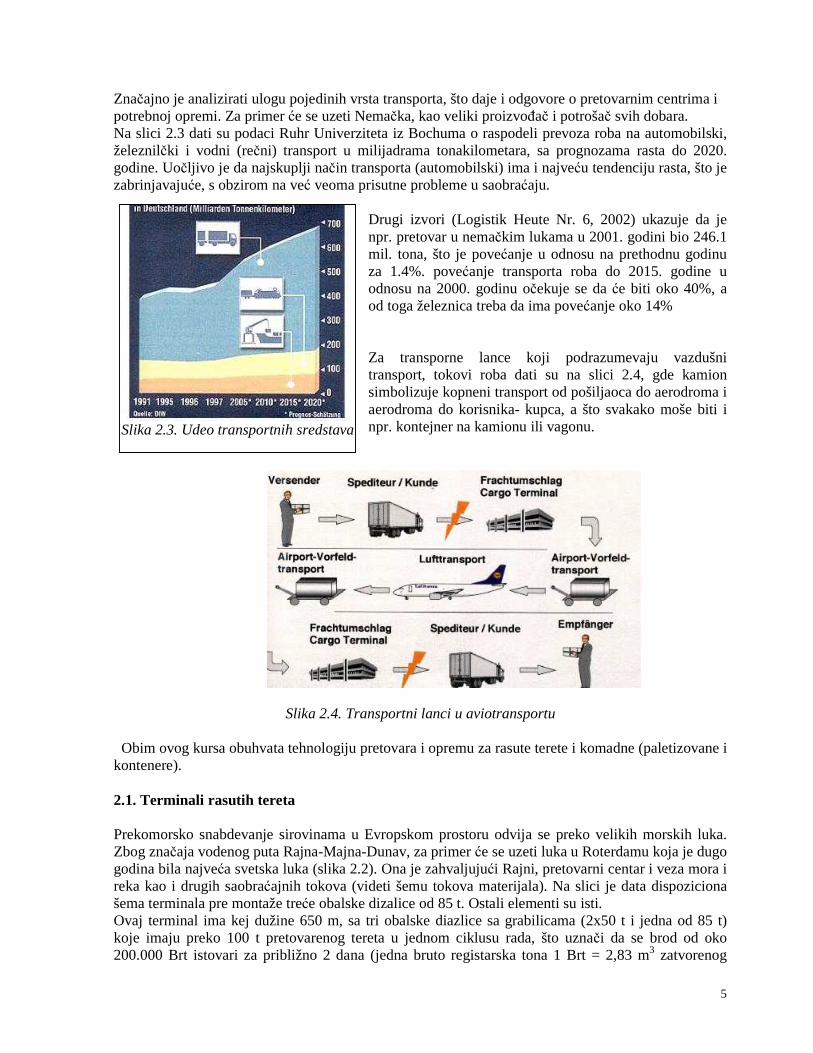
Značajno je analizirati ulogu pojedinih vrsta transporta, što daje i odgovore o pretovarnim centrima i potrebnoj opremi. Za primer će se uzeti Nemačka, kao veliki proizvoñač i potrošač svih dobara. Na slici 2.3 dati su podaci Ruhr Univerziteta iz Bochuma o raspodeli prevoza roba na automobilski, železnilčki i vodni (rečni) transport u milijadrama tonakilometara, sa prognozama rasta do 2020. godine. Uočljivo je da najskuplji način transporta (automobilski) ima i najveću tendenciju rasta, što je zabrinjavajuće, s obzirom na već veoma prisutne probleme u saobraćaju.
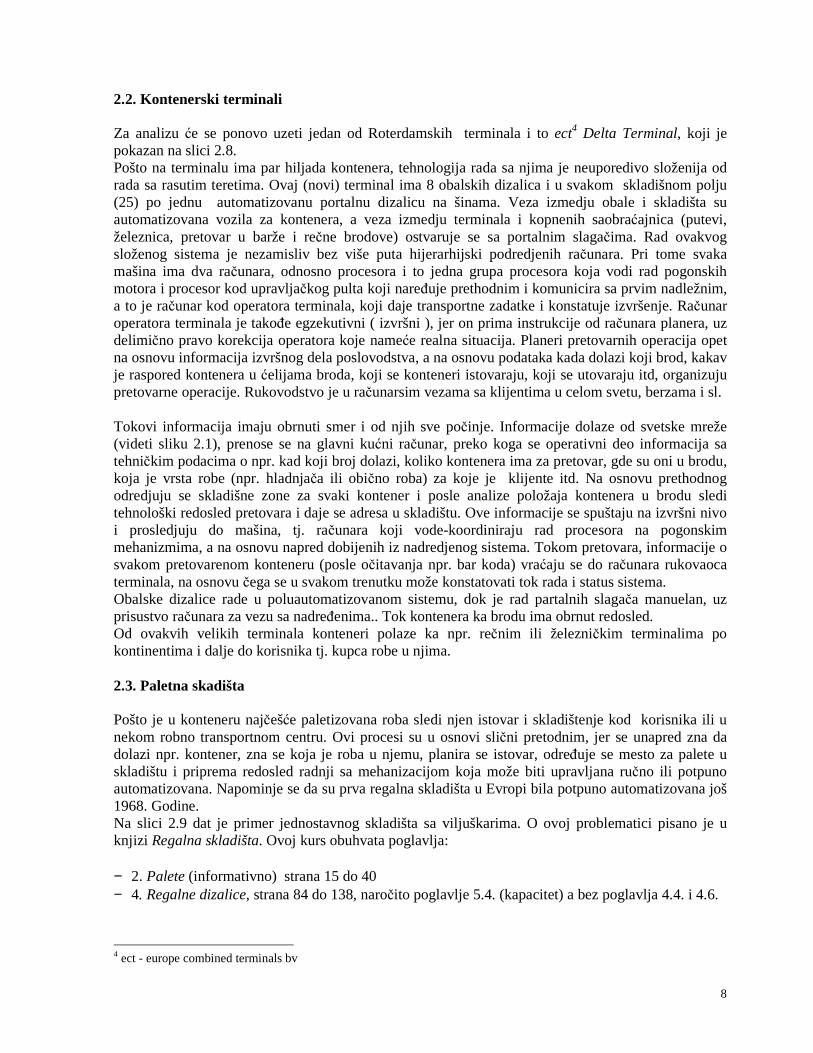
Drugi izvori (Logistik Heute Nr. 6, 2002) ukazuje da je npr. pretovar u nemačkim lukama u 2001. godini bio 246.1 mil. tona, što je povećanje u odnosu na prethodnu godinu za 1.4%. povećanje transporta roba do 2015. godine u odnosu na 2000. godinu očekuje se da će biti oko 40%, a od toga železnica treba da ima povećanje oko 14% Za transporne lance koji podrazumevaju vazdušni transport, tokovi roba dati su na slici 2.4, gde kamion simbolizuje kopneni transport od pošiljaoca do aerodroma i aerodroma do korisnika- kupca, a što svakako moše biti i npr. kontejner na kamionu ili vagonu.
Slika 2.4. Transportni lanci u aviotransportu
Obim ovog kursa obuhvata tehnologiju pretovara i opremu za rasute terete i komadne (paletizovane i kontenere). 2.1. Terminali rasutih tereta Prekomorsko snabdevanje sirovinama u Evropskom prostoru odvija se preko velikih morskih luka. Zbog značaja vodenog puta Rajna-Majna-Dunav, za primer će se uzeti luka u Roterdamu koja je dugo godina bila najveća svetska luka (slika 2.2). Ona je zahvaljujući Rajni, pretovarni centar i veza mora i reka kao i drugih saobraćajnih tokova (videti šemu tokova materijala). Na slici je data dispoziciona šema terminala pre montaže treće obalske dizalice od 85 t. Ostali elementi su isti. Ovaj terminal ima kej dužine 650 m, sa tri obalske diazlice sa grabilicama (2x50 t i jedna od 85 t) koje imaju preko 100 t pretovarenog tereta u jednom ciklusu rada, što uznači da se brod od oko 200.000 Brt istovari za približno 2 dana (jedna bruto registarska tona 1 Brt = 2,83 m3 zatvorenog
Slika 2.3. Udeo transportnih sredstava

6
brodskog tovarnog prostora). Veličina skladišta je 65 ha, a rasuti tereti se pretovaraju trakastim transporterima do odlagača koji oformljuju profil skladišta, a istovremeno su i izuzimači sa rotorom (rotorni bageri) koji uzimaju rasute terete i preko sistema trakastih transportera pune barže na ušću Rajne. Tokovi materijala (ruda, uglja,...) su jednosmerni, kao i u svim industrijski važnim regijama koje su odavno ostale bez sirovine, a koje se transaportuju iz Južne Amerike, Afrike, Australije, itd. Pretovar morskih brodova je sa cikličnim radom obalskih dizalica, čije grabilice u jednom zahvatu prenesu oko 30 t (kod dizalica nosivosti 50 t) jer je i grabilica ima svoju masu, a ciklus rada dizalice je 1-2 min. Svi dalji transporti (ka skladištu i od skladišta ka baržama) su kontinualnog tipa. Tokovi informacija su obrtnog smera u početku pretovara, a potom su tokom pretovara dvosmerni. I pored taga što je mali asortiman roba, na skladištu postoji više skladišnih zona koje sadrže čak i iste robe za različite klijente. Dakle, pre početka pretovara naredbama iz komandnog centra odredjuje se putanja tereta po sistemu trakastih transportera do mesta odlaganja ili eventualno direktno u barže. Tokom rada nadredjeni računar prima informacije o statusu izvršenja preko senzora i mernih mesta (vaga). Takodje se prati rad svih mašina koje pored informacionog sistema veza imaju i procesore za vodjenje rada mašina. Nuzposledica pretovara brodova je i pretovar- istakanje vode iz tankova brodova, jer npr. brod od 200 000 t kada je prazan puni se sa oko 60 000 t vode kao balasta koja se pri utovaru ispušta i remeti mikroklimu okoline. Organizacija ujedinjnih nacija za pomorski transport IMO (International Maritime Organisation) daje podatke da se na ovaj način godišnje 10 do 12 milijardi t vode pretače.
Slika 2.5. Šema tokova rasutih tereta (more, reka, železnica) Rasuti tereti baržama i rečnim brodovima prenose se do mesta potrošnje uz Rajnu, Majnu, Dunav, npr. čak do Luke Novi Sad i dalje. Na istoj slici (2.5) dat je i teleskopski levak pogodan za brze utovare brodova u rečnim lukama, kapaciteta preko 500 t/sat. Konstrukcija (pat. prijava) predviña i hidrauličnu platformu ispred levka, za podizanje kamiona sa rasutim teretima, u vreme visokih vodostaja. Takoñe je dat i ureñaj sa bunkerom (pat. prijava) za pretovar rasurih tereta iz brodova (grabilicama) sa posebnim dozirnim napravama za prljave terete i žitarice koje se pretovaraju u kamione ili otvorene ili zatvorene vagone.

7
Dspozicija terminala sa rasporedom opteme: -Obala mora sa obalskim dizalicama (na slici su samo 2, a ima ih 3 u eksploataciji), -Sistem trakastih transportera do ugaonoh pretovarnih stanica, -Bočni sistem trakastih tarnsportera sa mogućim pretovarima u hodnike skladišta, -Ponovo pretovar na dalji sistem transporta ka rečnim brodovima. Svaki hodnik ima odlagač (koji je istovremeno i izuzimač) rasutih tereta.
Slika 2.6. Dispozicija roterdamske luke
Odlagač i izuzimač rasutih tereta Transportni sistem za utovar u brodove
Slika 2.7. Mosvlakte - terminal rasutih retera, detalji
8
2.2. Kontenerski terminali Za analizu će se ponovo uzeti jedan od Roterdamskih terminala i to ect4 Delta Terminal, koji je pokazan na slici 2.8. Pošto na terminalu ima par hiljada kontenera, tehnologija rada sa njima je neuporedivo složenija od rada sa rasutim teretima. Ovaj (novi) terminal ima 8 obalskih dizalica i u svakom skladišnom polju (25) po jednu automatizovanu portalnu dizalicu na šinama. Veza izmedju obale i skladišta su automatizovana vozila za kontenera, a veza izmedju terminala i kopnenih saobraćajnica (putevi, železnica, pretovar u barže i rečne brodove) ostvaruje se sa portalnim slagačima. Rad ovakvog složenog sistema je nezamisliv bez više puta hijerarhijski podredjenih računara. Pri tome svaka mašina ima dva računara, odnosno procesora i to jedna grupa procesora koja vodi rad pogonskih motora i procesor kod upravljačkog pulta koji nareñuje prethodnim i komunicira sa prvim nadležnim, a to je računar kod operatora terminala, koji daje transportne zadatke i konstatuje izvršenje. Računar operatora terminala je takoñe egzekutivni ( izvršni ), jer on prima instrukcije od računara planera, uz delimično pravo korekcija operatora koje nameće realna situacija. Planeri pretovarnih operacija opet na osnovu informacija izvršnog dela poslovodstva, a na osnovu podataka kada dolazi koji brod, kakav je raspored kontenera u ćelijama broda, koji se konteneri istovaraju, koji se utovaraju itd, organizuju pretovarne operacije. Rukovodstvo je u računarsim vezama sa klijentima u celom svetu, berzama i sl. Tokovi informacija imaju obrnuti smer i od njih sve počinje. Informacije dolaze od svetske mreže (videti sliku 2.1), prenose se na glavni kućni računar, preko koga se operativni deo informacija sa tehničkim podacima o npr. kad koji broj dolazi, koliko kontenera ima za pretovar, gde su oni u brodu, koja je vrsta robe (npr. hladnjača ili obično roba) za koje je klijente itd. Na osnovu prethodnog odredjuju se skladišne zone za svaki kontener i posle analize položaja kontenera u brodu sledi tehnološki redosled pretovara i daje se adresa u skladištu. Ove informacije se spuštaju na izvršni nivo i prosledjuju do mašina, tj. računara koji vode-koordiniraju rad procesora na pogonskim mehanizmima, a na osnovu napred dobijenih iz nadredjenog sistema. Tokom pretovara, informacije o svakom pretovarenom konteneru (posle očitavanja npr. bar koda) vraćaju se do računara rukovaoca terminala, na osnovu čega se u svakom trenutku može konstatovati tok rada i status sistema. Obalske dizalice rade u poluautomatizovanom sistemu, dok je rad partalnih slagača manuelan, uz prisustvo računara za vezu sa nadreñenima.. Tok kontenera ka brodu ima obrnut redosled. Od ovakvih velikih terminala konteneri polaze ka npr. rečnim ili železničkim terminalima po kontinentima i dalje do korisnika tj. kupca robe u njima. 2.3. Paletna skadišta Pošto je u konteneru najčešće paletizovana roba sledi njen istovar i skladištenje kod korisnika ili u nekom robno transportnom centru. Ovi procesi su u osnovi slični pretodnim, jer se unapred zna da dolazi npr. kontener, zna se koja je roba u njemu, planira se istovar, odreñuje se mesto za palete u skladištu i priprema redosled radnji sa mehanizacijom koja može biti upravljana ručno ili potpuno automatizovana. Napominje se da su prva regalna skladišta u Evropi bila potpuno automatizovana još 1968. Godine. Na slici 2.9 dat je primer jednostavnog skladišta sa viljuškarima. O ovoj problematici pisano je u knjizi Regalna skladišta. Ovoj kurs obuhvata poglavlja: − 2. Palete (informativno) strana 15 do 40 − 4. Regalne dizalice, strana 84 do 138, naročito poglavlje 5.4. (kapacitet) a bez poglavlja 4.4. i 4.6.
4 ect - europe combined terminals bv

9
− 5. Transportna sredstva za palete sa hidrauličnim uredjajima za dizanje, strana 138-172, bez poglavlja 5.6.
− 10. Logistika (deo 10. 9 10.1).
Slika 2.8. ECT Delta terminal
Slika 2.9. Paletno skladište
10
2.4. Aerodromski terminali
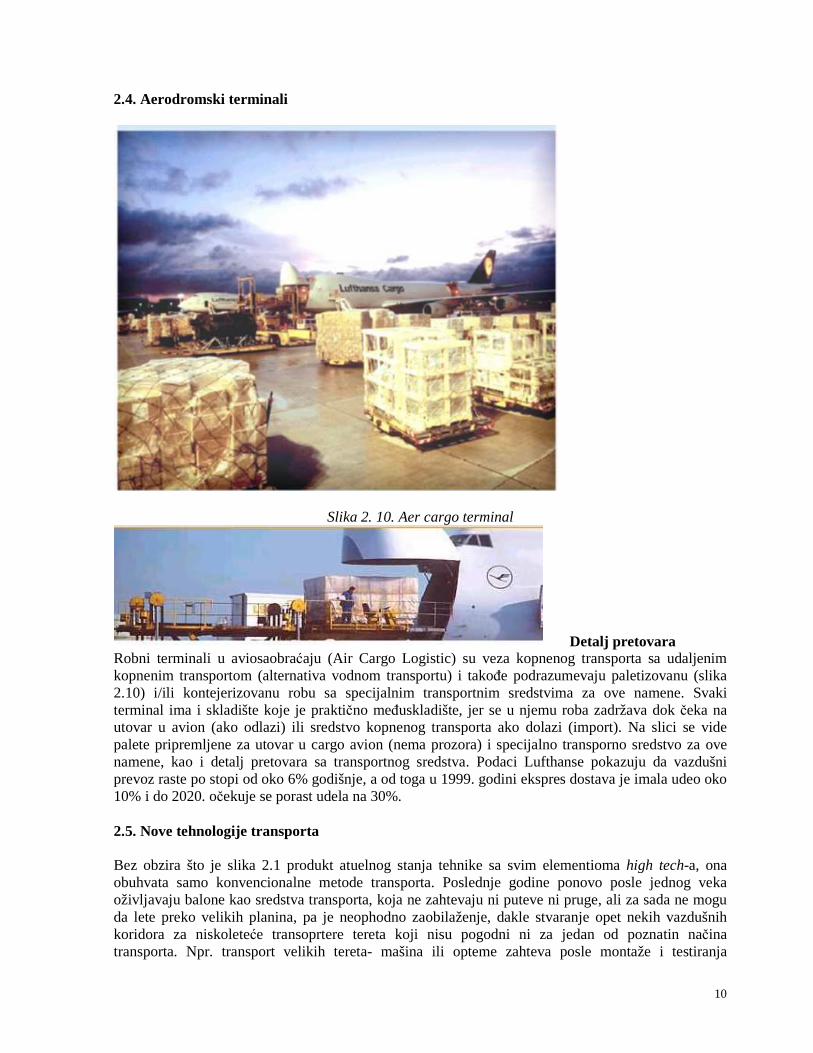
Slika 2. 10. Aer cargo terminal
Detalj pretovara Robni terminali u aviosaobraćaju (Air Cargo Logistic) su veza kopnenog transporta sa udaljenim kopnenim transportom (alternativa vodnom transportu) i takoñe podrazumevaju paletizovanu (slika 2.10) i/ili kontejerizovanu robu sa specijalnim transportnim sredstvima za ove namene. Svaki terminal ima i skladište koje je praktično meñuskladište, jer se u njemu roba zadržava dok čeka na utovar u avion (ako odlazi) ili sredstvo kopnenog transporta ako dolazi (import). Na slici se vide palete pripremljene za utovar u cargo avion (nema prozora) i specijalno transporno sredstvo za ove namene, kao i detalj pretovara sa transportnog sredstva. Podaci Lufthanse pokazuju da vazdušni prevoz raste po stopi od oko 6% godišnje, a od toga u 1999. godini ekspres dostava je imala udeo oko 10% i do 2020. očekuje se porast udela na 30%. 2.5. Nove tehnologije transporta Bez obzira što je slika 2.1 produkt atuelnog stanja tehnike sa svim elementioma high tech-a, ona obuhvata samo konvencionalne metode transporta. Poslednje godine ponovo posle jednog veka oživljavaju balone kao sredstva transporta, koja ne zahtevaju ni puteve ni pruge, ali za sada ne mogu da lete preko velikih planina, pa je neophodno zaobilaženje, dakle stvaranje opet nekih vazdušnih koridora za niskoleteće transoprtere tereta koji nisu pogodni ni za jedan od poznatin načina transporta. Npr. transport velikih tereta- mašina ili opteme zahteva posle montaže i testiranja
11
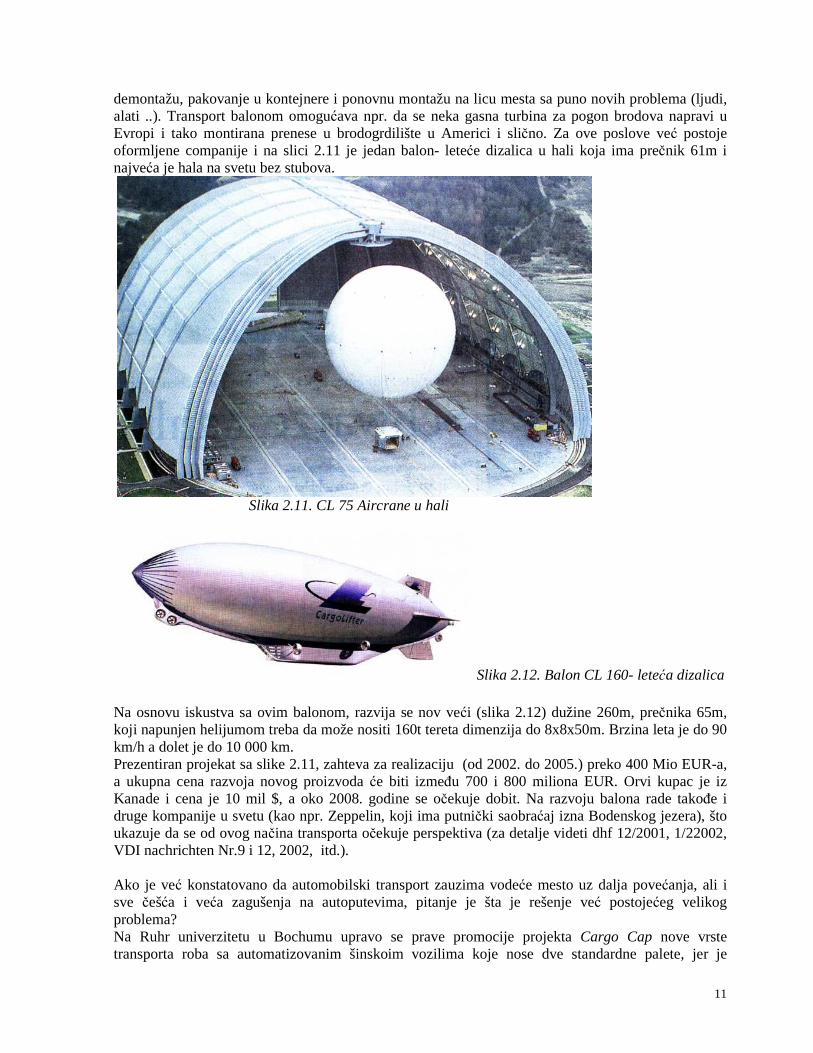
demontažu, pakovanje u kontejnere i ponovnu montažu na licu mesta sa puno novih problema (ljudi, alati ..). Transport balonom omogućava npr. da se neka gasna turbina za pogon brodova napravi u Evropi i tako montirana prenese u brodogrdilište u Americi i slično. Za ove poslove već postoje oformljene companije i na slici 2.11 je jedan balon- leteće dizalica u hali koja ima prečnik 61m i najveća je hala na svetu bez stubova.
Slika 2.11. CL 75 Aircrane u hali
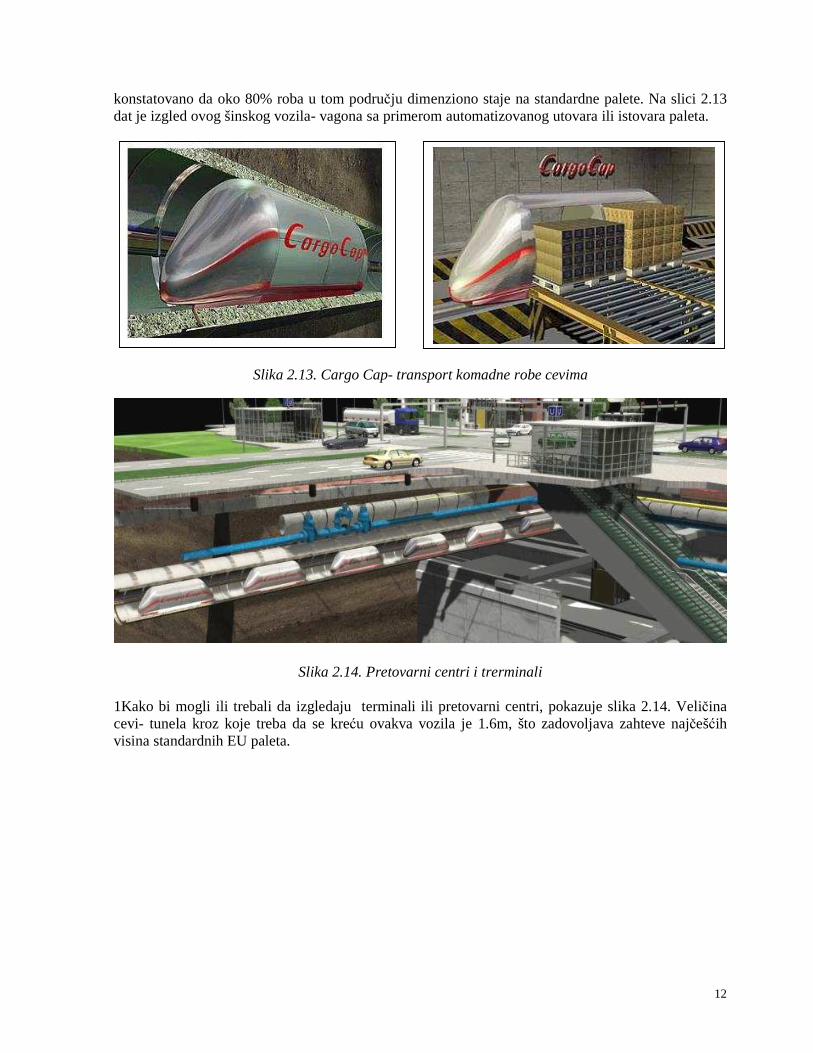
Slika 2.12. Balon CL 160- leteća dizalica Na osnovu iskustva sa ovim balonom, razvija se nov veći (slika 2.12) dužine 260m, prečnika 65m, koji napunjen helijumom treba da može nositi 160t tereta dimenzija do 8x8x50m. Brzina leta je do 90 km/h a dolet je do 10 000 km. Prezentiran projekat sa slike 2.11, zahteva za realizaciju (od 2002. do 2005.) preko 400 Mio EUR-a, a ukupna cena razvoja novog proizvoda će biti izmeñu 700 i 800 miliona EUR. Orvi kupac je iz Kanade i cena je 10 mil $, a oko 2008. godine se očekuje dobit. Na razvoju balona rade takoñe i druge kompanije u svetu (kao npr. Zeppelin, koji ima putnički saobraćaj izna Bodenskog jezera), što ukazuje da se od ovog načina transporta očekuje perspektiva (za detalje videti dhf 12/2001, 1/22002, VDI nachrichten Nr.9 i 12, 2002, itd.). Ako je već konstatovano da automobilski transport zauzima vodeće mesto uz dalja povećanja, ali i sve češća i veća zagušenja na autoputevima, pitanje je šta je rešenje već postojećeg velikog problema? Na Ruhr univerzitetu u Bochumu upravo se prave promocije projekta Cargo Cap nove vrste transporta roba sa automatizovanim šinskoim vozilima koje nose dve standardne palete, jer je
12
konstatovano da oko 80% roba u tom području dimenziono staje na standardne palete. Na slici 2.13 dat je izgled ovog šinskog vozila- vagona sa primerom automatizovanog utovara ili istovara paleta.
Slika 2.13. Cargo Cap- transport komadne robe cevima
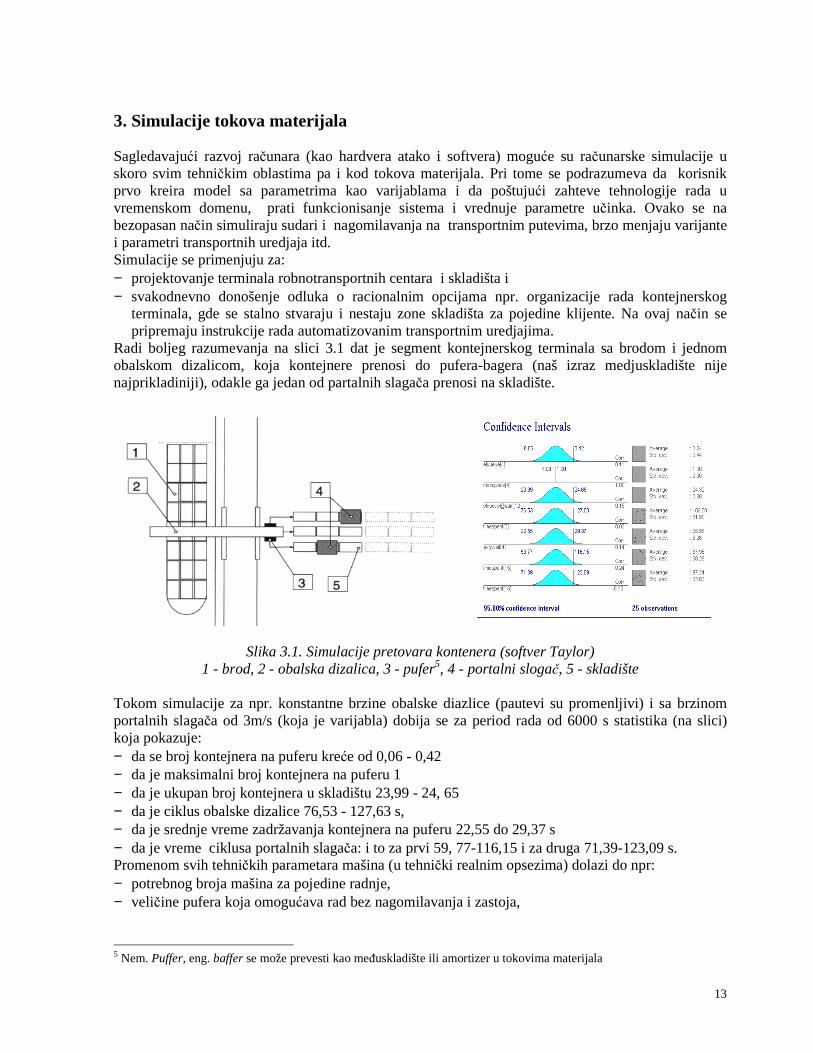
Slika 2.14. Pretovarni centri i trerminali 1Kako bi mogli ili trebali da izgledaju terminali ili pretovarni centri, pokazuje slika 2.14. Veličina cevi- tunela kroz koje treba da se kreću ovakva vozila je 1.6m, što zadovoljava zahteve najčešćih visina standardnih EU paleta.
13
3. Simulacije tokova materijala Sagledavajući razvoj računara (kao hardvera atako i softvera) moguće su računarske simulacije u skoro svim tehničkim oblastima pa i kod tokova materijala. Pri tome se podrazumeva da korisnik prvo kreira model sa parametrima kao varijablama i da poštujući zahteve tehnologije rada u vremenskom domenu, prati funkcionisanje sistema i vrednuje parametre učinka. Ovako se na bezopasan način simuliraju sudari i nagomilavanja na transportnim putevima, brzo menjaju varijante i parametri transportnih uredjaja itd. Simulacije se primenjuju za: − projektovanje terminala robnotransportnih centara i skladišta i − svakodnevno donošenje odluka o racionalnim opcijama npr. organizacije rada kontejnerskog
terminala, gde se stalno stvaraju i nestaju zone skladišta za pojedine klijente. Na ovaj način se pripremaju instrukcije rada automatizovanim transportnim uredjajima.
Radi boljeg razumevanja na slici 3.1 dat je segment kontejnerskog terminala sa brodom i jednom obalskom dizalicom, koja kontejnere prenosi do pufera-bagera (naš izraz medjuskladište nije najprikladiniji), odakle ga jedan od partalnih slagača prenosi na skladište.
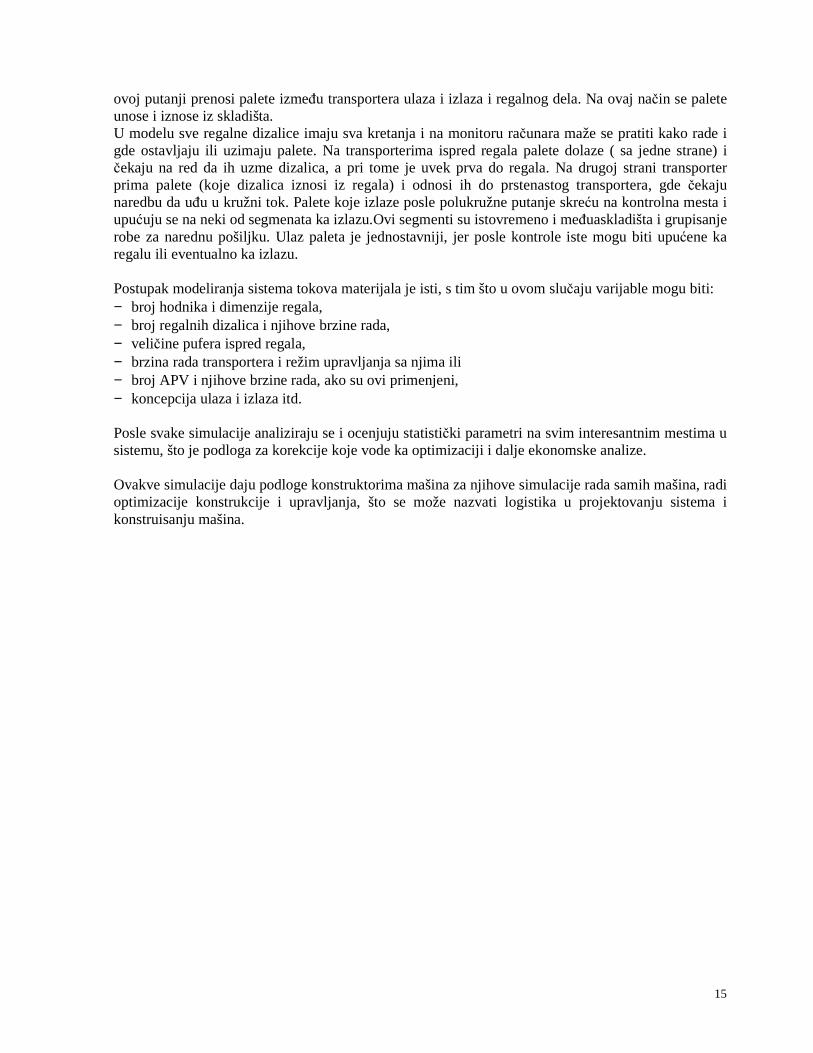
Slika 3.1. Simulacije pretovara kontenera (softver Taylor)
1 - brod, 2 - obalska dizalica, 3 - pufer5, 4 - portalni slogač, 5 - skladište Tokom simulacije za npr. konstantne brzine obalske diazlice (pautevi su promenljivi) i sa brzinom portalnih slagača od 3m/s (koja je varijabla) dobija se za period rada od 6000 s statistika (na slici) koja pokazuje: − da se broj kontejnera na puferu kreće od 0,06 - 0,42 − da je maksimalni broj kontejnera na puferu 1 − da je ukupan broj kontejnera u skladištu 23,99 - 24, 65 − da je ciklus obalske dizalice 76,53 - 127,63 s, − da je srednje vreme zadržavanja kontejnera na puferu 22,55 do 29,37 s − da je vreme ciklusa portalnih slagača: i to za prvi 59, 77-116,15 i za druga 71,39-123,09 s. Promenom svih tehničkih parametara mašina (u tehnički realnim opsezima) dolazi do npr: − potrebnog broja mašina za pojedine radnje, − veličine pufera koja omogućava rad bez nagomilavanja i zastoja,
5 Nem. Puffer, eng. baffer se može prevesti kao meñuskladište ili amortizer u tokovima materijala

14
− zahteva za izmenu koncepcije uz promenu dužina puteva i vrsta mašina za pojedine radnje (npr. umesto portalnih slagača koji opslužuju samo jedan red, mogu se uzeti partalne dizalice koje pokrivaju 2,3 ili npr. 4 kontejnera u redu itd),
Ukoliko se u prethodnim koracima ne dobiju zadovoljavajuća rešenja ili rešenja koja su isplativa, prave se nove koncepcije i ponavljaju se simulacije sa svim elementima za variranje parametara kako je navedeno u prethodnom. Posle simulacija koje vode ka optimizaciji, mora se analizirati i cena investicija koja se unek meri sa milionima npr. DM za više prihvatljivih varijanti, koja može biti razlog za ponovne temljne izmene pristupa problemu i korekcije sa novim ciklusima simulacija. Daljim transaportom kontenera npr. do neke fabrike ili regalnog skladišta dolazi se do pitanja kakvo je skladište potrebno.
Slika 3.2 Simulacija rada regalnog skladišta Na slici 3.2 najpre se daje da npr. kamioni donose i odnose kontener sa paletama neke robe. Utovar kontenera (za dati slučaj 40') može biti npr. viljuškarom i na slici je dat je primer promene broja paleta na meñuskladištu ulaza i izlaza u skladište u koje se unose i iznose palete. Na istoj slici je dat i model regalnog skladišta sa 7 hodnika i isto toliko i regalnih dizalica. Transporteri koji su istovremeno i meñuskadište (pufer) u sistemu, donose i odnose palete od hodnika regala do prstenaste putanje koja je takoñe kao transporter ili može biti sa automatskim paletnim vozilima (APV6) koje po 6 APV automatizovano paletno vozilo, eng. AGV-Automated Guided Vehicle, nem. FTS- Faherlose Transport-Systeme
0 1 2 3 4 5 6 7 8
0 100 200 300 400 500 600 Time (sec)
0 2 4 6 8 10 12 14 16 18 20 22 24 26
0 50 100 150 200 250 300 350 400 450 500 Time (sec)
15
ovoj putanji prenosi palete izmeñu transportera ulaza i izlaza i regalnog dela. Na ovaj način se palete unose i iznose iz skladišta. U modelu sve regalne dizalice imaju sva kretanja i na monitoru računara maže se pratiti kako rade i gde ostavljaju ili uzimaju palete. Na transporterima ispred regala palete dolaze ( sa jedne strane) i čekaju na red da ih uzme dizalica, a pri tome je uvek prva do regala. Na drugoj strani transporter prima palete (koje dizalica iznosi iz regala) i odnosi ih do prstenastog transportera, gde čekaju naredbu da uñu u kružni tok. Palete koje izlaze posle polukružne putanje skreću na kontrolna mesta i upućuju se na neki od segmenata ka izlazu.Ovi segmenti su istovremeno i meñuaskladišta i grupisanje robe za narednu pošiljku. Ulaz paleta je jednostavniji, jer posle kontrole iste mogu biti upućene ka regalu ili eventualno ka izlazu. Postupak modeliranja sistema tokova materijala je isti, s tim što u ovom slučaju varijable mogu biti: − broj hodnika i dimenzije regala, − broj regalnih dizalica i njihove brzine rada, − veličine pufera ispred regala, − brzina rada transportera i režim upravljanja sa njima ili − broj APV i njihove brzine rada, ako su ovi primenjeni, − koncepcija ulaza i izlaza itd. Posle svake simulacije analiziraju se i ocenjuju statistički parametri na svim interesantnim mestima u sistemu, što je podloga za korekcije koje vode ka optimizaciji i dalje ekonomske analize. Ovakve simulacije daju podloge konstruktorima mašina za njihove simulacije rada samih mašina, radi optimizacije konstrukcije i upravljanja, što se može nazvati logistika u projektovanju sistema i konstruisanju mašina.

16
4. Kapacitet pretovara i izbor pogonskih klasa 4.1. Uvod Sa eksploatacionog stanovišta kapacitet transportnih mašina i uredjaja verovatno je najvažniji parametar, jer od njega zavisi učinak odnosno produktivnost koja rezultuje sa dobiti preduzeća. Kao primer može poslužiti podatak da se u lučkim pretovarima naplaćuje nekoliko dolara (npr. 3 do 6 US$) za 1 t, 40 do 70 US$ za TEU kontejner ili da dan čekanja broda košta deset ili više hiljada US$. Analiza operacija rada i operaciona istraživanja podrazumevaju poznavanje mašina za pretovar, njihovih svojstava, prednosti i mana. Kod proširivanja kapaciteta terminala, distributivnih centara i skladišta, a naročito kod projektovanja novih robno-transportnih sistema koji koštaju više miliona US$, najznačajnije je poznavati tehničke mogućnosti savremene opreme za pretovar, navedenim simulacijama tokova materijala uskaditi vrstu, tip i kapacitet opreme i tehnoekonomskom analizom tražiti optimizacije rešenja. Na slici 4.1 dat je primer iz prethodnog poglavlja o simulacije pretovara kontenera koji može biti u npr. nekoj rečnoj luci, gde se konteneri od 20 stopa skladište u tri hodnika. Pretovar od broda do kopna obavlja portalna dizalica, a dalji transport i odlaganje na skladištu obavlja se portalnim slagačima (4). U ovom slučaju analiziraće se samo rad obalske dizalice, da bi se odredio kapacitet pretovara.
Slika 4.1. Simulacija pretovara kontenera
Oznake na slici su: 1 - ulaz brod-barža, 2 - obalska dizalica, 3 - medjuskladište (pufer), 4 - portalni slagači, 5 - skladište kontenera.
Primer odredjivanja kapaciteta pretovara daće se na primeru obalskih dizalica za slučaj rada sa kontenerima i rasutim teretima. Pretovarni procesi sa generalnim teretima biće samo komentarisani. 4.2. Odredjivanje kapaciteta pretovara obalskih dizalica za slučaj rada sa kontejnerima Dimenzije kontenera uzete su prema ISO 668, a b1 je zazor izmedju kontenera na brodu.
Korak redjanja b za širinu kontenera W = 2437 mm b = W +b1 = 2437 + b1 Visina kontenera je H = 2438 ÷2896 mm. Raspon šinske staze obalskih dizalica je c = 10 ÷ 30 m. ν1 , ν2 i ν3 su brzine dizanja, kretanja kolica i kretanja dizalice (respektivno).
17
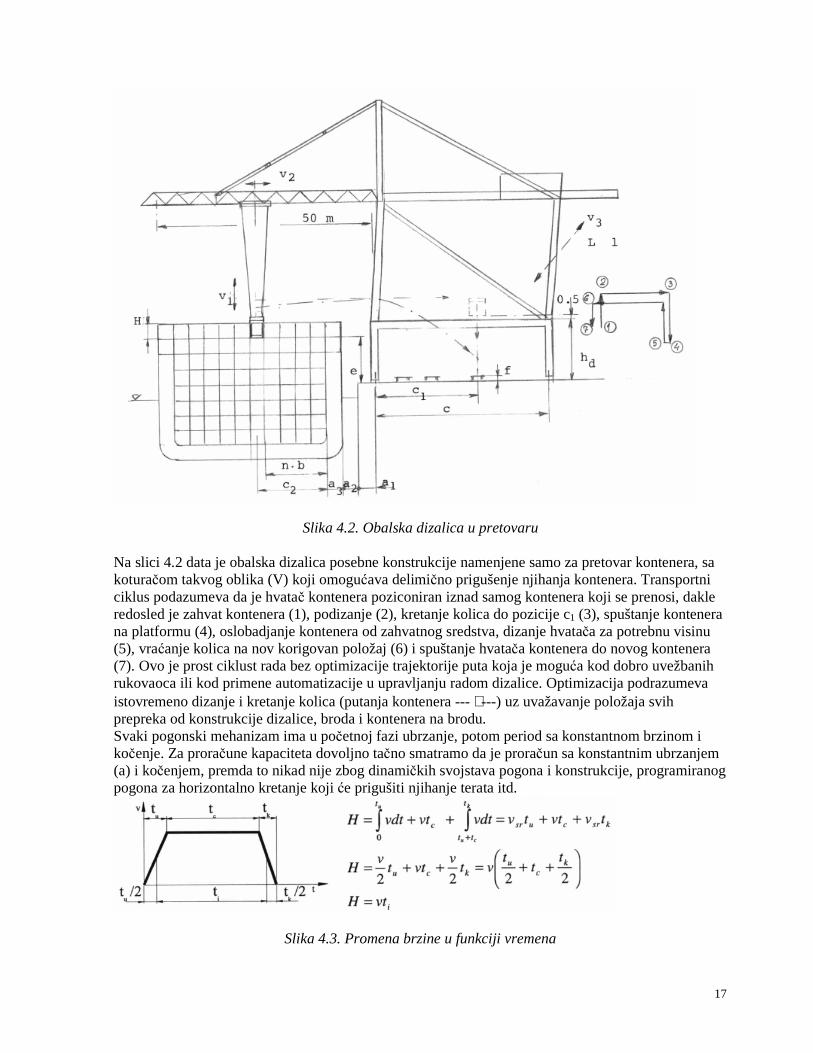
Slika 4.2. Obalska dizalica u pretovaru Na slici 4.2 data je obalska dizalica posebne konstrukcije namenjene samo za pretovar kontenera, sa koturačom takvog oblika (V) koji omogućava delimično prigušenje njihanja kontenera. Transportni ciklus podazumeva da je hvatač kontenera poziconiran iznad samog kontenera koji se prenosi, dakle redosled je zahvat kontenera (1), podizanje (2), kretanje kolica do pozicije c1 (3), spuštanje kontenera na platformu (4), oslobadjanje kontenera od zahvatnog sredstva, dizanje hvatača za potrebnu visinu (5), vraćanje kolica na nov korigovan položaj (6) i spuštanje hvatača kontenera do novog kontenera (7). Ovo je prost ciklust rada bez optimizacije trajektorije puta koja je moguća kod dobro uvežbanih rukovaoca ili kod primene automatizacije u upravljanju radom dizalice. Optimizacija podrazumeva istovremeno dizanje i kretanje kolica (putanja kontenera --- ⋅ ---) uz uvažavanje položaja svih prepreka od konstrukcije dizalice, broda i kontenera na brodu. Svaki pogonski mehanizam ima u početnoj fazi ubrzanje, potom period sa konstantnom brzinom i kočenje. Za proračune kapaciteta dovoljno tačno smatramo da je proračun sa konstantnim ubrzanjem (a) i kočenjem, premda to nikad nije zbog dinamičkih svojstava pogona i konstrukcije, programiranog pogona za horizontalno kretanje koji će prigušiti njihanje terata itd.
Slika 4.3. Promena brzine u funkciji vremena

18
Na slici 4.3. dat je dijagram brzine. Ako je zadati put H, onda zbog a =const, integral puta u fazi ubrzanja i kočenja postaje proizvod polovine srednje vrednosti brzine i vremena. 4.2.1. Vreme ciklusa rada obalske dizalice Prateći tok operacije (ciklusa rada) sa slike 2.2, dobiće se dijagram ciklusa dat na slici 2.3. Na dijagramu su sve brzine date u pozitivnom polju ordinate, premda su brzine pri npr. spuštanju i povratnom kretanju negativnog predznaka. U strogom tehničkom smislu može se crtati dijagram i sa pozitivnim i negativnim predznacima brzina, ali znak brzine je dogovorni i dijagram je namenjen za analizu vremena rada. Vreme ciklusa T dato je izrazom: T = T1 + T2 + T3 + T4 gde je:
1
1
n
ii
T t=
=∑ - suma svih glavnih vremena,
2
1
( )2 2
mu k
i
t tT
== +∑ - suma polovine vremena urzanja i kočenja
3
1
k
mi
T t=
=∑ - suma svih medjuvremena izmedju dva kretanja (vreme za promenu komandi)
T4 = tz + to - vreme za zahvat tereta (kontenera) i odkačinjanje zahvatnog sredstva.
Izračunavanje pojedinih vremena - T1 = t1 + t2 + t3 + t4 + t5 + t6 gde je:
1. Vreme dizanja konterena od broda do visine 0,5 m iznad zone prepreke
1
1
5,0
v
Hneht d ⋅±−+
=
U izrazu ± n H znači duži ili kraći put u zavisanosti od položaja kontenera u brodu u odnosu na referentnu ravan ili palubu broda (n je broj kontenera gore ili dole, H je visina kontenera ). 2. Vreme kratanja kolica (n b je broj kontenera pomnožen sa korakom redjanja u odnosu na trup broda)
2 3 2 1 12
2 2
c a a a c Bt
v v
+ + + += =
3. Spuštanje kontenera (mere u metrima)
31
0.5dh ft
v
+ −=
4. Dizanje hvatača kontenera (bez kontenera visine H)
41
0.5dh f Ht
v
+ − −=

19
5. Vraćanje kolica nazad iznad broda, kojim se u simulacijama rada koriguje (perametar n) položaj kolica na novu poziciju, ili se zadržava ista pozicija za ekvivalentni ciklus rada.
52
B n bt
v
±= ,
52
Bt
v=
6. Spuštanje hvatača do sledećeg kontenera u simulacijama rada, ili na istu poziciju za ekvivalentni ciklus rada.
61
0.5dh e n Ht
v
+ − ±=
- T2 - u datom primeru ima četiri uključenja pogona dizanja i prelaznih procesa ubrzanja (tu
d) i kočenja (tu
k) i dva uključenja pogona kolica, pa je
)22
()22
(2
112
kk
kv
i
dk
du
n
i
ttttT +++= ∑∑
==
- m
n
i
tT ∑=
=1
3 suma četiri medjuvremena
Ako postoji potreba za kretanjem cele dizalice, što je neuobičajeno, jer platforme dolaze ispod dizalice, prethodno izračunati ciklus se produžava na delove ciklusa sa vremenima ti za ovu operaciju. Kretanje dizalice je korekciono u odnosu na redove kontenera u trupu broda i ono svakako utiče na ukupni (prosečni) časovni kapacitet. Brojni primer: Za obalsku dizalicu brzina dizanja punog 20 stopnog kontenera (Q = 24 t) v1 = 1 m/s, brzina kretanja kolica v2 = 2 m/s (brzina kolica bez tereta je najčešće 1,5 puta veća) i dimenzija prema slici 2.1: a1 = 3 m, a2 = 2 m, a3 = 2 m, e = 3 m, c1 = 12 m, hd = 12 m, f = 0,8 m. U radnom ciklusu uzima se npr. peti kontener, tako da je c2 = 3 (w + b1) + w/2 = 3 (2,438 + 0,150) + 2,438/2 = 8,98 m (b1 = 150 mm, npr.) i usvaja se c2 = 9 m. Za n = 4, biće c2 = 4 (2,438 + 0,150) + 2,438/2 i c2 = 11,57 m ( ovaj slučaj je označen na slici). Vremena ubrzanja i kočenja pogonskog mehanizma za dizanje neka su ista i iznose npr. 0,5 ÷ 2 sec, pa se usvaja tu
d = tkd = 1 s, a vremena ubrzanja i kočenja kolica su npr. 3 ÷ 7 s, pa se usvaja tu
k = tkk =
4 s. Vreme za promenu komandi neka je npr. tm = 0,5 s. Vreme hvatanja kontenera može biti nekoliko sekundi ako se radi sa hvatačem (spreader-om) ili čak nekoliko minuta, ako se radi sa priveznicama i neka je tz = to = 10 s.
Pojedinačna vremena ciklusa rada su:
1. Vreme dizanja kontenera (za položaj kao na slici 2.1)
11
0,5 12 0,5 39,5
1dh e
t sv
+ − + −= = =

20
2. Vreme kretanja kolica (za n = 3) 3. Vreme spuštanja kontenera
sv
fht d 7,11
1
8,05,0125,0
13 =−+=−+=
4. Vreme dizanja praznog hvatača (npr. H = 2,438 m)
sv
Hfht d 36,9
1
438,28,05,0125,0
14 =−−+=
−−+=
5. Vreme vraćanja kolica na istu poziciju
sv
caaact 14
2
922312
2
232115 =++++=
++++=
6. Vreme spuštanja hvatača kontenera na isti nivo kao na početku ciklusa (n H = 0) - Suma glavnih vremena (T1) - Suma polovina vremena ubrzanja i kočenja
stttt
Tkk
ku
dk
dv 12)
2
4
2
4(2)
2
1
2
1(4)
22()
22(
2
1
4
12 =+⋅++⋅=+++= ∑∑
- Suma medjuvremena
stT m 25.044
13 =⋅==∑
- Vreme zahvata i skidanja (odkačinjanja) tereta Vreme ciklusa rada
9 2 2 3 122 3 2 1 1 142 22
c a a a ct s
v
+ + + + + + + += = =
61
0,5 12 0,5 3 2,34811,9
1dh e H
t sv
+ − + + − += = =
1 1 2 3 4 5 6 9,5 14 11,7 9,3 14 11,9 70, 4T t t t t t t s= + + + + + = + + + + + =
4 10 10 20z oT t t s= + = + =
1 2 3 4 70,4 12 2 20 104, 4T T T T T s= + + + = + + + =

21
Slika 4.4.Dijagram ciklusa rada Za slučaj optimizacija trajektorije posle inicijalnog dizanja kontenera npr. h1 = 3 m, kada se dno izdigne iznad kontenera pored (koji smeta), može početi horizontalno kretanje. Put od h1 preći će kontener pri dizanju za vreme t1
’ = tu + ti h1 = hu + hi hi = h1 - hu = 3 - 0,5 = 2,5 m Za vreme ubrzanja pri dizanju preći će se visina
mtv
h uu 5,012
1
21 =⋅==
Ostatak visine od hi = 2,5 m preći će se za vreme ti
sv
httvh iii 5,2
1
5,2
111 ===∴=
Dakle posle 3.5 s dizanja, može da počne horizontalno kretanje uz kontrolu da kontener ne zapne za konstrukciju dizalice. U zoni odlaganja kontenera, pod uslovom da nema smetnji od drugih kontenera na nekoj od susednih platformi teorijski bi se moglo uzeti da se istovremeno zakoče kolica i kontener spusti na odgovarajuću platformu. Praktično kontener mora da visi na 1-2 m u trenutku pozicioniranja kolica, jer zaostalo njihanje može stvarati probleme pri pozicioniranju u odlaganju kontenera na šasiju. U realnim uslovima ovo vreme pozicioniranja je 3-5 s kod dizalica sa procesorskim upravljanjem rada ili sa uvežbanim koncentrisanim i odmornim rukovaocem. U ostalim slučajevima ovo vreme može biti i 20-30 s (umirenje tereta i korekcija položaja kolica). U konkretnom slučaju ako nema smetnji u zoni odlaganja, kontener se može početi spuštati posle ulaska u polje izmedju šina dizalice (posle prelaska konstrukcije portala). U odnosu na početak kretanja kolica ovo vreme je
ikv ttt 22 ' +=
Predjeni put tokom ubrzanja kolica je
'1 1 2,5 3,5u it t t s∴ = + = + =

22
pa je ostatak puta od starta do šine Bi = c2 + a3 + a2 + a1 - Bu = 9 + 2 + 2 + 3 - 4 = 12 m
Vreme , dakle
Kod povratnog dela ciklusa dovoljno je inicijalno dizanje hvatača kontenera oko 0,5 m i već može početi kretanje kolica nazad, s tim da hvatač bude podignut pre dolaska kolica iznad konstrukcije dizalice. Pošto je put ubrzanja kolica Bu = 4 m (uz istu brzinu kretanja sa i bez kontenera) preostali put (dužina c1) preći će se u vremenu
s 42
412
2
12 =−=−=
v
Bct uii
Proizilazi da se pre s 8442''2 =+=+= iik
u ttt od završetka vremena t4 = 10,1 s može početi sa
kretanjem kolica.
Ako nema prepreka na brodu može se istovremeno završiti kretanje kolica i spuštanje hvatača kontenera do npr. 0,5 m iznad narednog kontenera. Prednosti koje pruža ciklus rada sa optimizacijom kretanja pokazane su na slici 2.4.
Slika 4.5. Ciklus rada sa optimizacijom trajektorije
Iz dijagrama proizilazi da je
Radi ilustracije znaèaja analize kapaciteta rada obalskih dizalica kod pretovara kontenera, daje se presek jednog broda (slika 4.6) sa označenim vremenima ciklusa pretovara za svaki kontener u matrici poprečnog preseka
2 24 4
2 2u u
vB t m= = =
2
126
2i
i
Bt s
v= = =
'2 4 7,5 10 st = + =
' ' ''1 2 3 4 2 52 2 2 2 2 2
1 1 1 1 4 4 =10+3,5+10+ 11, 7 10 9, 36 8 14
2 2 2 2 2 2
d d kd d kt t tt t tu k u k u kt t t t t t t tz oT = + + + + + + + + + − + + + =
+ + + + + + − + + +
66,6 sT =
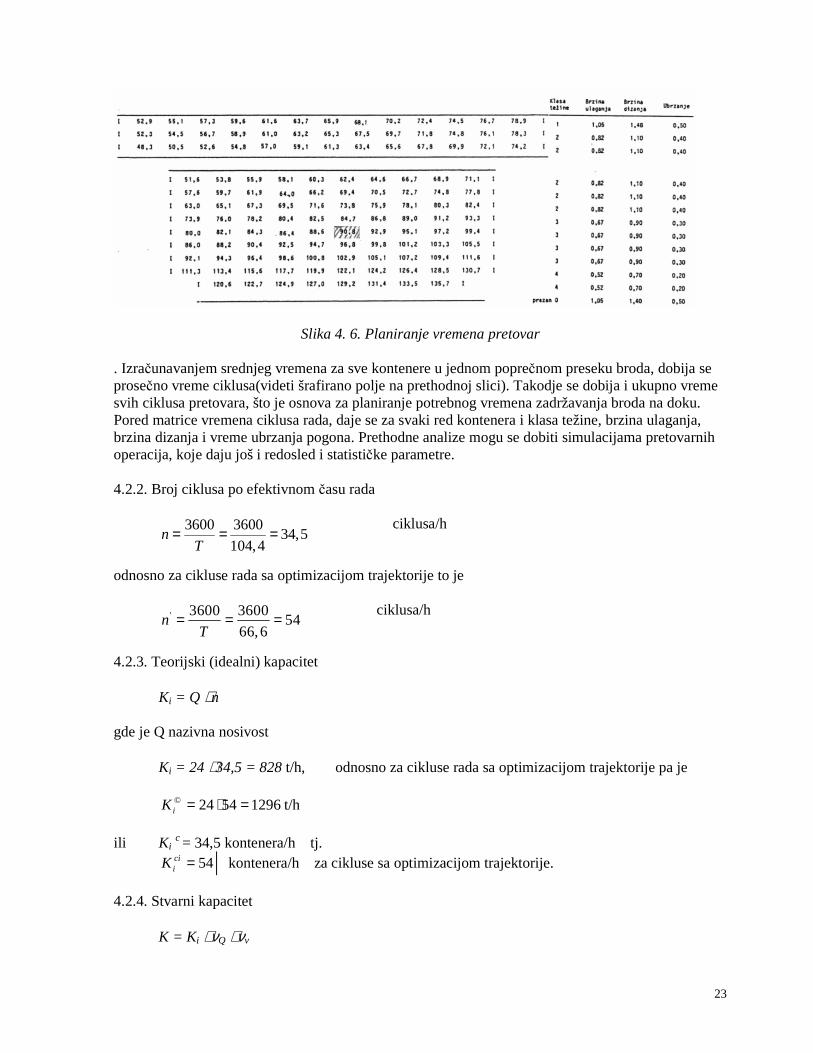
23
Slika 4. 6. Planiranje vremena pretovar . Izračunavanjem srednjeg vremena za sve kontenere u jednom poprečnom preseku broda, dobija se prosečno vreme ciklusa(videti šrafirano polje na prethodnoj slici). Takodje se dobija i ukupno vreme svih ciklusa pretovara, što je osnova za planiranje potrebnog vremena zadržavanja broda na doku. Pored matrice vremena ciklusa rada, daje se za svaki red kontenera i klasa težine, brzina ulaganja, brzina dizanja i vreme ubrzanja pogona. Prethodne analize mogu se dobiti simulacijama pretovarnih operacija, koje daju još i redosled i statističke parametre. 4.2.2. Broj ciklusa po efektivnom času rada
ciklusa/h odnosno za cikluse rada sa optimizacijom trajektorije to je
ciklusa/h 4.2.3. Teorijski (idealni) kapacitet Ki = Q ⋅ n gde je Q nazivna nosivost Ki = 24 ⋅ 34,5 = 828 t/h, odnosno za cikluse rada sa optimizacijom trajektorije pa je t/h12965424© =⋅=iK ili Ki
c = 34,5 kontenera/h tj. 54=ci
iK
kontenera/h za cikluse sa optimizacijom trajektorije. 4.2.4. Stvarni kapacitet K = Ki ⋅ νQ ⋅ νv
3600 360034,5
104,4n
T= = =
' 3600 360054
66,6n
T= = =

24
gde je νQ - stepen nekorišćenja nosivosti (u slučaju kontenera napunjenosti Qkonsred/Qkonmax) i νv stepen iskorišćenja radnog vremena. Ako je νQ ∼ 0,5 ÷ 1 i neka je npr. νQ = 0,7 (npr. statističko vrednovanje većeg broja pretovara) i ako se efektivno radi 6-7 sati po smeni od 8 sati, npr. neka je νv = 0,8 (efektivno dizalica radi 6 sati i 24 min) biće: K = 828 ⋅ 0,7 ⋅ 0,8 = 463,7 t/h tj. K' = 1296 ⋅ 0,7 ⋅ 0,8 = 725,8 t/h za slučaj optimizacije trajektorije pri radu ili KC = Ki ⋅ νv ako se računa br. kontenera, što je primerenije, tada je KC = 34,5 ⋅ 0,8 = 27,6 kontener/h, odnosno KC’ = 54 ⋅ 0,8 = 43,2 kontenera/h, za slučaj rada sa optimizacijom trajektorije. Napomena Broj ciklusa po času je jedan od osnovnih parametara za sagledavanje veka trajanja mašine, jer se može izračunati broj ciklusa po danu, mesecu i godini. Takodje se održavanje mašine i njenih delova može planira posle odredjenog broja časova tj. ciklusa rada. Izračunati kapacitet pretovara može se još povećati, ako se koriste kombinovani ciklusi rada, gde se posle pretovara jednog kontenera iz broda hvatač premešta iznad druge šasije, uzima drugi kontener i prenosi na brod, 4.3. Odredjivanje kapaciteta pretovara obalskih dizalica za slučaj rada sa grabilicom U slučaju rada obalskih dizalica sa grabilicom, prilaz problemu odredjivanja kapaciteta je isti. Razlika je u tome što vreme T4 za zahvat i odlaganje tereta ne postoji kao posebna stavka, već je ono sadržano u kretanjima grabilice (otvaranju i zatvaranju). Dakle u ovim slučajevimaciklus rada počinje sa zatvaranjem grabilice, koje se može obavljati brzinom dizanja v1 ili čak i manjom brzinom zavisno od koncepcije pogona dizanja.
-dužina užadi za zatvaranje grabilice ∆∆∆∆hd je proizvod broja krakova koturače n i razmaka koturača grabilice h. Za sve vreme zatvaranja grabilica je na istoj visini ili se čak malo spušta (uranja) u rasuti teret, pa je vreme zatvaranja grabilice :
1z
ht
v
∆=
Slika 4.7. Potreban broj užadi za zatvaranje grabilice

25
Posle zatvaranja grabilice sledi dizanje, kretanje kolica najčešće do bunkera koji je sastavni deo dizalice i tako postavljen na portal da je podignuta grabilica u horizontalnoj ravni 0,5-1 m iznad bunkera. Pošto nema spuštanja tereta (grabilice) sledi otvaranje grabilice. Vreme otvaranja (pražnjenja) grabilice je:
01
ht
v
∆=
Posle rasterećenja grabilice u otvorenom položaju ista se vraća nazad i spušta na isto mesto za izvesnu visinu dublje u brod ka podu na rasuti teret ili se kolica pomeraju do položaja gde postoji gomila rasutog tereta. Kretanje portala dizalice je najčešće korekciono (vidi sliku 4.8).
Slika 4.8. Ciklus rada dizalice sa grabilicom
Redosled radnji daće se u formi prikaza proračuna ciklusa rada i to:
1. Glavna vremena
1.1. Vreme za zatvaranje grabilice
1
z
ht
v
∆=
1.2. Vreme dizanja (visina H je varijabla od Hmin do Hmax na dnu broda)
11
Ht
v=
1.3. Vreme za promenu dohvata (B je osrednjeni razmak od ose broda do ose bunkera)
22
Bt
v=

26
1.4. Vreme otvaranja grabilice
01
ht
v
∆=
1.5. Vreme vraćanja na istu poziciju za ekvivalentni radni ciklus
3 22
Bt t
v= =
1.6. Vreme spuštanja grabilice na istu poziciju za ekvivalentni radni ciklus ili H’=H+1-2 m, spuštanje do mase rasutog tereta
1
4 v
Ht =
Ako postoji i obrtanje i/ ili kretanje dizalice (ako nema bunkera već se odlaže na skladište) dodaje se i ovo vreme. Pretovar sa kretanjem dizalice nije racionalan i treba ga izbegavati. 1.7. Vreme obratanja dizalice ( α -ugao obrtanja, ω-ugaona brzina)
5tαω
= i povratno kretanje- obrtanje bez tereta
`5t
αω
=
1.8. Vreme kretanja dizalice
63
Lt
v=
i vraćanje na početnu poziciju 6
3
`L
tv
=
Sledi
( ) ( )` `1 2 3 4 5 5 6 6z oT t t t t t t t t t t= + + + + + + + + +
Slika 4.9. Dijagram ciklusa rada
2. Polovine vremena ubrzanja i kočenja (za cikluse bez obrtanja i kretanja dizalice)
21 1
( ) ( )2 2 2 2
d d k kn mu k u k
i i
t t t tT
= =
= + + +∑ ∑
27
Vremena ubrzanja tud i kočenja tk
d pri dizanju su ∼ 0,5-1 s, pri promeni dohvata, obrtanju i eventualno kretanju cele dizalice (tu
k i tkk) su ∼0,3 - 6 s i kod savremenih dizalica proizilaze iz perioda
oscilovanja tereta (za radna kretanja ).
3. Medjuvremena
1
n
mi
T t=
=∑
4. Vreme za zahvat i odlaganje tereta T4 = 0
Proizilazi vreme ciklusa rada
T = T1 + T2 + T3
Dalja analiza je ista kao i u prethodnom slučaju, uz napomenu da se kod izvedenih konstrukcija koriste brzine dizanja v1 = 1-2 m/s, brzine promene dohvata od 1-2 m/s i brzine kretanja dizalice (kao korekcione) oko 0,5 m/s. U analizi kapaciteta sa stepenom iskorišćenja nosivosti νQ može se pored nosivosti računati i volumetrijski kapacitet grabilice. νQ
V ∼0,9-0,95. Maseni stepen iskorištenja nosivosti je νQ
Q ≅0,9 ako je grabilica namenjena za teret koji se .Uz svaku dizalicu najčešće postoje tri grabilice različite zapremine i to za lake, srednje i teške terete, kao npr.ugalj, hemikalije i rude.
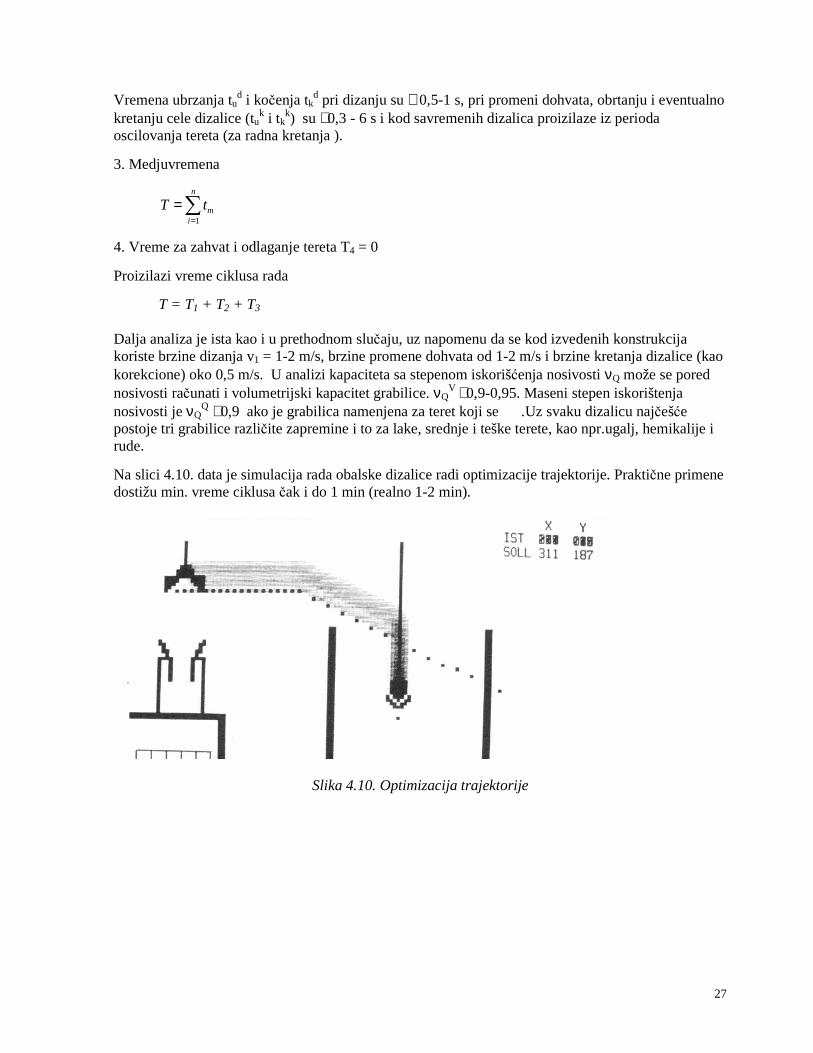
Na slici 4.10. data je simulacija rada obalske dizalice radi optimizacije trajektorije. Praktične primene dostižu min. vreme ciklusa čak i do 1 min (realno 1-2 min).
Slika 4.10. Optimizacija trajektorije

28
4.4. Odredjivanje pogonske klase dizalice i pogonskih grupa pojedinih pogona Ako se poñe od činjenice da npr.dizalice u rečnim lukama nosivosti 20-30 tona imaju masu 200-300 tona i da koštaju 1.5-3 miliona DM, zavisno od primenjenih tehničkih rešenja i nivoa automatizacije,, a obalske dizalice u morskim lukama npr. za pretovar kontenera nosivosti 45 t - 60 t imaju masu čak i preko 1000 t i koštaju i preko 10 miliona DM, proizilazi izuzetno značajno kako odabrati koncepciju i osnovne tehničke parametre kao i tkzv. pogonsku klasu tj. intenzitet i uslove korišćenja, što je u nadležnosti korisnika, jer jedino on zna šta treba da radi dizalica. Projektant dobija prethodne podatke u vidu projektnog zadatka. Raniji propisi i standardi polazili su od broja ciklusa po času, npr. godišnjem broju časova rada, relativnoj opterećenosti itd. i na osnovu toga celu dizalicu svrstavali u istu pogonsku klasu. Posle osamdesetih godina dvadesetog veka došlo je do razvrstavanja pogonskih mehanizama u pogonske grupe, tako da se kroz analizu rada i uslova rada svakog pogonskog mehanizma odredjuje njegova pogonska grupa za očekivani (projektovani) vek trajanja. Tako npr. ISO 4301 iz 1986. ima 5 delova gde deo 1 obuhvata opštu klasifikaciju, deo 2 mobilne dizalice, deo 3 toranjske dizalice, deo 4 portalne, obrtne (i lučke) dizalice i deo 5 mosne i portalne dizalice na skladištima i sl. Prema ISO 4301/1 pogonske grupe proizilaze iz tkzv. klasa korišćenja, koje počivaju na učestanosti opterećenja odnosno broja ciklusa rada i spektra opterećenja. U smislu ovog standarda ciklus rada počinje sa zahvaćenim teretom i završava se sa spremnošću mašine da zahvati novi teret.
Tabela 1. Klase korišćenja
Klasa Max.broj ciklusa rada Napomena U0 1.6 ⋅ 104
Povremena upotreba U1 3.2 ⋅ 104 U2 6.3 ⋅104
U3 1.25 ⋅105
U4 2.25 ⋅ 105 Upotreba u lakom režimu (sa dužim prekidima) U5 5 ⋅ 105 Upotreba u srednjem režimu (sa prekidima) U6 1 ⋅ 106 Upotreba u intenzivnom režimu U7 2 ⋅ 106
Intenzivna upotreba, teški uslovi rada u više smena U8 4 ⋅ 106
U9 Preko 4 ⋅ 106 U tabeli 1. data je podela u 9 klasa korišćenja (vo do v9) u zavisnosti od broja ciklusa sa primedbama za praktične primene. Koliki će biti projektovani vek dizalice proizilazi iz broja časova rada dnevno (jedna, dve ili tri smene), broja radnih dana u godini (u industriji je to npr. 250, u lukama čak do 364 radna dana) i svakako očekivani ili zahtevani radni vek. ^esto korišćeni radni vek od 10 godina je mali, ako se realno sagledaju radni ciklusi koji će dizalica obavljati. Projektovani vek npr. lučkih i skladišnih dizalica bi morao biti oko 30 godina, pri čemu se mora uzeti u obzir da dizalice iako npr. rade u 3 smene i npr. 364 dana godišnje, da je njihovo stvarno radno vreme samo kada ima posla. Spektri opterećenja izražavaju se koeficijentom (Kp) koji uzima u obzir koliko će puta dizalica u radnom veku (ukupnom projektovanom broju ciklusa rada) prenositi terete u opsegu od minimalnog do maksimalnog.

29
gde je: Ci - očekivani broj ciklusa rada sa pojedinim teretima CT - projektovani broj ciklusa rada CT = C1 + C2 + C3 + C4 + ... Cn Pi - veličina tereta za pojedine brojeve ciklusa rada Pi = P1, P2, P3, ... Pn., ... Pmax
sledi
+ ...
Prema veličini koeficijenta Kp, spektri opterećenja se dele u 4 grupe prema tabeli 2.
Tabela 2. Spektri optrećenja
Spektar opterećenja
Koeficijent Kp
Napomena
Q1 - lak 0,125 Mašina vrlo retko radi sa najvećim opterećenjem a često sa malim opterećenjem
Q2 - srednji 0,25 Mašina je povremeno opterećena sa najvećim opterećenjem a često sa srednjim opterećenjem
Q3 - težak 0,50 Mašina je povremeno opterećena sa najvećim opterećenjem a često sa većim opterećenjima
Q4 - vrlo težak 1,00 Mašina stalno radi sa najvećim opterećenjem Na osnovu prethodnog odredjuju se pogonske klase prema tabeli 3.
Tabela 3. Pogonske klase
Spektar Koeficijent Klase korišćenja opterećenja Kp Uo U1 U2 U3 U4 U5 U6 U7 U8 V9
Q1 - lak 0.125 A1 A2 A3 A4 A5 A6 A7 A8 Q2 - srednja 0.25 A1 A2 A3 A4 A5 A6 A7 A8 Q3 - težak 0.5 A1 A2 A3 A4 A5 A6 A7 A8 Q4 - vrlo težak 1.0 A2 A3 A4 A5 A6 A7 A8 4.4.1. Klasifikacija pojedinih mehanizama u pogonske grupe Za potpuno definisanje uslova rada pojedinih pogonskih mehanizama, potrebno je analizom njihovog učešća u ciklusu rada odrediti pripadajuće grupe. Slično kao i u tabeli 1, tabela 4. daje podelu pogonskih mehanizama u klase korišćenja To do T9 koji svakako podrazumevaju manje brojeve vremena aktivnog rada, jer je ovo vreme uvek deo ciklusa rada u kome učestvuje više pogonskih mehanizama. Spektri opterećenja, slično kao i kod analize rada cele mašine, podrazumevaju klasifikaciju opterećenja pogonskih mehanizama, npr. rad bez tereta, rad sa mrtvim teretom (prazna grabilica, hvatač kontenera, traverze...) rad sa teretima različitih nivoa Pi. Pri ovome treba napomenuti da npr. kolica dizalice mogu imati npr. 100 t. i da rade sa grabilicom npr. mase ∼ 15 t i nose koristan teret
3
m ax
( )i ip
T
C PK
C P
=
∑
3 3 3 33 31 1 2 2
m a x m a x m a x m a x
( ) ( ) ( ) ( )n np
T T T T
C P C PC P C PK
C P C P C P C P= + ⋅ + ⋅ + ⋅
30
npr. 17 t (nosivost je 32 t). Ovim se ukazuje da opterećenje pogonskog mehanizma za kretanje kolica i pri korisnom teretu nula (npr. sa kukom) ima teret od mase kolica od 100 t.
Tabela 4. Klase korišćenja pojedinih mehanizama
Klasa Broj sati rada Napomena
T0 200 T1 400 Povremena upotreba T2 800 T3 1 600 T4 3 200 Regularna upotreba u lakom režimu T5 6 300 Regularna upotreba u srednjem režimu T6 12 500 Regularna upotreba u intenzivnom režimu T7 25 000 T8 50 000 Intenzivna upotreba T9 100 000
∑
⋅= 3
max
)(P
P
t
tK i
T
im
ti - su pojedinačna vremena opterećenja mehanizma sa teretom Pi tT = t1 + t2 + t3 + t4 + ... tn = ∑ ti tT je vreme posmatranja reprezentativnih opterećenja Pmax je najveće opterećenje, pa je
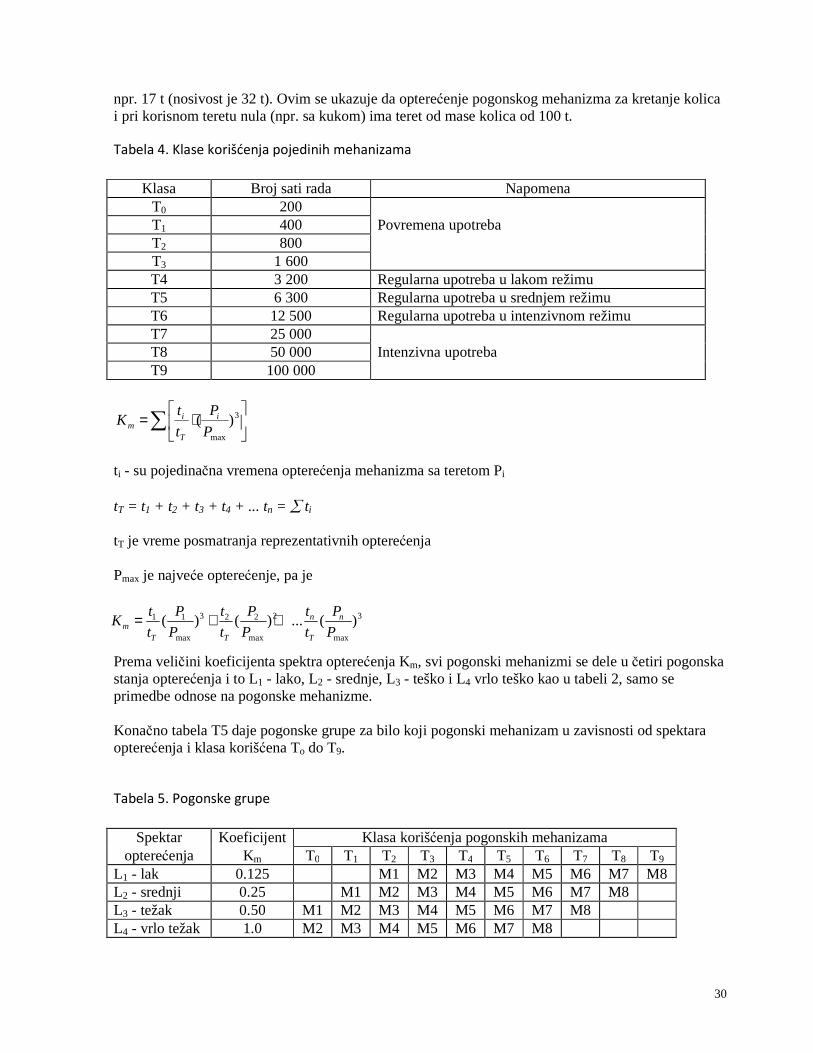
Prema veličini koeficijenta spektra opterećenja Km, svi pogonski mehanizmi se dele u četiri pogonska stanja opterećenja i to L1 - lako, L2 - srednje, L3 - teško i L4 vrlo teško kao u tabeli 2, samo se primedbe odnose na pogonske mehanizme. Konačno tabela T5 daje pogonske grupe za bilo koji pogonski mehanizam u zavisnosti od spektara opterećenja i klasa korišćena To do T9.
Tabela 5. Pogonske grupe
Spektar Koeficijent Klasa korišćenja pogonskih mehanizama
opterećenja Km T0 T1 T2 T3 T4 T5 T6 T7 T8 T9 L1 - lak 0.125 M1 M2 M3 M4 M5 M6 M7 M8 L2 - srednji 0.25 M1 M2 M3 M4 M5 M6 M7 M8 L3 - težak 0.50 M1 M2 M3 M4 M5 M6 M7 M8 L4 - vrlo težak 1.0 M2 M3 M4 M5 M6 M7 M8
3 2 31 1 2 2
max max max
( ) ( ) ... ( )n nm
T T T
t Pt P t PK
t P t P t P= + +

31
Kao primer primene prethodnih klasifikacija daje se tabela 6 prema ISO 4301-4.
Tabela 6. Pogonske grupe portalnih, obrtnih i lučkih dizalica
P o g o n s k a g r u p a m e h a n i z a m a z a Br. Tipovi
dizalica Uslovi rada Pogon.
klasa dizalice
dizanje promenu dohvata (strele)
vožnju kolica
rotaciju u hor. ravni
translat. kret. diz.
1 dizalica sa ruènim komandama
A1 M1 M1 M1 M1 M1
2 radionièke diz. za komadni teret
A2 M2 M1 M1 M2 M2
3a 3b
brod. diz.sa kukom brod. diz. sa grabil. ili elektromagnetom
A4 A6
M3 M5
M3 M3
M3 M3
4 brodogrdjevne diz. A4 M5 M4 M4 M4 M5
5a
dizalice sa kukom u skladištima
A4 M4 M3 M4 M4 M4
5b 5c
dizalice sa grabilicom i el. magnetom u skladištu
stalna upotre- ba sa prekid. intenzivna upo treba
A6
A8
M6
M8
M6
M7
M6
M7
M6
M7
M5
M6
6a 6b
lučke dizalice sa kukom
stalna upotre- ba sa prekid. intenzivna upo treba
A6
A7
M5
M7
M4
M5
M5
M6
M3
M4
6c 6d
lučke dizalice sa grabilicom i el. magnetom
stalna upotre- ba sa prekid. intenzivna upo treba
A7
A8
M7
M8
M6
M7
M6
M7
M4
M4
4.4.2. Klasifikacija prema EN 13001-1 Evropski standard (predlog) EN 13001-1 od 1997. godine takodje predvidja klasifikaciju broja radnih ciklusa u 10 klasa korišćenja U1 - U9 prema (tabela 7) ukupnom broju radnih ciklusa C.
Tabela 7. Klase korišćenja
Klasa Ukupan broj radnih ciklusa: U0 C ≤ 1.60 104 U1 1.60 104 < C ≤ 3.15 104 U2 3.15 104 < C ≤ 6.30 104
U3 6.30 104 < C ≤ 1.25 105 U4 1.25 105 < C ≤ 2.50 105 U5 2.50 105 < C ≤ 5.00 105 U6 5.00 105 < C ≤ 1.00 106 U7 1.00 106 < C ≤ 2.00 106 U8 2.00 106 < C ≤ 4.00 106
U9 4.00 106 < C ≤ 8.00 106

32
Pri tome se napominje da ukupnom broju radnih ciklusa treba dodati i neki ekvivalent opterećenja koja proizilaze iz montaže/demontaže ako je to češći proces kao kod mobilnih dizalica, kretanja lučkih dizalica na nove radne pozicije, podizanje prepusta iznad vode i sl. Navedeni standard klasifikuje predjene puteve kod pravolinijskog ili obrtnog kretanja dizalica u zavisnosti od nivoa opterećenja (veličine opterećenja od min do max) prema slici 4.11. nri
nrj
nri (i = 1 ….m) nrj ( j = 1 ….n) radni prostor 1 radni prostor 2 x xri srx
xrj
Slika 4.11. Srednji predjeni put izmedju dva radna područja Oznake na slici su: nri - broj ciklusa rada na poziciji i = 1 ... m u radnom području 1, nrj - broj ciklusa rada na poziciji j = 1 ... n u radnom području 2, xri - put pojedinih pogonskih mehanizama pri radu u poziciji i, xrj - put pojedinih pogonskih mehanizama u pozicije j. Prosečni predjeni putevi svih radnih ciklusa su dati kao
)( rr cxX ⋅=∑τ
gde je cr - broj ciklusa sa putem xr Iz prethodnog proizilazi tabela 8.
Tabela 8. Klase srednjih predjenih puteva
Klasa Srednji predjeni put
[ ]mX lin
Klasa
Srednje obrtno kretanje
[ ]radX ang Dlin 0 linX ≤ 0.63 Dang 0 16/π≤angX Dlin 1 0,63 < linX ≤ 1.25 Dang 1 16/π < 8/π≤angX Dlin 2 1,25 < linX ≤ 2,5 Dang 2 8/π < 4/π≤angX Dlin 3 2,5 < linX ≤ 5 Dang 3 4/π < 2/π≤angX Dlin 4 5 < linX ≤ 10 Dang 4 2/π < π≤angX Dlin 5 10 < linX ≤ 20 Dang 5 π < π2≤angX
∑
∑
∑
∑
=
=
=
= −=m
ii
m
iriri
n
jj
n
jrjrj
sr
n
xn
n
xn
x
1
1
1
1

33
Dlin 6 20 < linX ≤ 40
Dlin 7 40 < linX ≤ 80
Dlin 8 80 < linX ≤ 160
Dlin 9 160 < linX ≤ 320
Spektri opterećenja u osnovi imaju istu ideju, ali drugačiju definiciju. U ovom standardu se polazi od radnih zadataka (ciklusa) izmedju radnih polja, tako da se definišu najpre spektri opterećenja gde je: Ci - broj radnih ciklusa sa teretom Qi u okviru zadatka r (izmedju dva radna polja) Cr - broj radnih ciklusa na zadatku r (izmedju dva radna polja) Qi - teret u ciklusu Ci Qr - najveći teret u zadatku r Ako se povezuju više različitih radnih polja, tada je ukupni spektar opterećenja
gde je C - ukupan broj radnih ciklusa i Q - najveći teret od prisutnih Qr Iz prethodnog proizilazi tabela 9 sa klasama spektara opterećenja.
Tabela 9. Klase Q spektra opterećenja
Klasa Spektri opterećenja Q0 kQ ≤ 0.0313 Q1 0.0313 < kQ ≤ 0.0625 Q2 0.0625 < kQ ≤ 0.1250 Q3 0.1250< kQ ≤ 0.2500 Q4 0.2500< kQ ≤ 0.5000 Q5 0.5000 < kQ ≤ 1.000
Novina u ovom standardu je klasiranje potrebnog broja dodatnih pokreta i korekcija položaja radi pozicioniranja. Ovaj parametar se povezuje sa pozitivnim uticajem automatizacije rada na brže pozicioniranje, što pored kraćeg ciklusa rada, daje i smanjenje broja trzaja pogona pri korekciji položaja a što utiče na zamor materijala, odnosno vek trajanja delova i konstrukcije. Primer Prema očekivanim uslovima rada i vremenu srednjeg ciklusa rada neke kontejnerske dizalice iz datog primera za npr. 15 godina, sledi broj ciklusa iz klase korišćenja U6 sa CT = 1 106 ciklusa. Ako se podeli opterećenje u npr. 4 klase-grupe i to: P1= do 10t, P2= 10 do 20t, P3= 20 do 30t i P4= 30 do 40t, sa učešćem pojedinih opterećenja od: C1 = 0.15 106 ciklusa, C2 = 0.5 106 ciklusa, C3 = 0.2 106 ciklusa i C4 = 0.15 106 ciklusa, biće koeficijent pogonske klase
3( )i ir
i r r
C QkQ
C Q= ⋅∑
3( )r rr
r
C QkQ kQ
C Q= ⋅ ⋅∑

34
3 3 3 3
3 31 1 2 2 4 4
max. max. max. max.
3 3 3 36 6 6 6
6 6 6 6
0.15 10 10 0.5 10 20 0.2 10 30 0.15 10 40
40 40 40 401 10 1 10 1 10 1 10
pT T T T
C PC P C P C PK
C P C P C P C P
= + + + =
⋅ ⋅ ⋅ ⋅ = + + + ⋅ ⋅ ⋅ ⋅
sledi Kp = 0.298
Iz tabele 3 proizilazi da je klasa korišćenja za teške usove rada Q3 i U6 ⇒ A7 6. ELEMENTI MAŠINA I UREDJAJA (OPREME) ZA PRETOVAR 6.1. Užad U tehničkoj primeni koriste se užad od prirodnih vlakana (npr. kudelja sisal, manila, juta...), sintetičkih vlakana (polipropilen, polietilen, najlon,..) i metala. Zbog cene, kudeljna užad su skoro samo od istorijskog značaja, jer su njihovo mesto u primeni preuzela sintetička užad (npr. za vezivanje manjih plovnih objekata). Za prenošenje tereta i kretanje koriste se čelična užad već više od 150 godina. Užad se dobijaju uplitanjem više čeličnih žica u strukove koji ako se kao takvi koriste zovu i zavojno uže. Više strukova kada se použi oko jezgra (metalnog ili sintetičkog porekla) daje uže, čija se konstrukcija prilagodjava nameni.
a) b) c) d) e) f) Slika 6.1. a) spiralno uže, b) zatvoreno uže, c) obično čelično uže, d) sil čelično uže, e) Vorington-sil
čelično uže, f) savremena konstrukcija užeta (Novkabel) Zavojno i obično čelično uže ima sve žice istog prečnika, Vorington (Warrington) uže u spoljnjem sloju strukova ima tanje i deblje žice, a Vorington-sil (Seale) ima preko Vorington struka još jedan sloj debljih žica, koje povećava krutost užeta (što je mana) ali i vek trajanja jer su ove deblje žice izložene habanju pri radu.. Savremene konstrukcije užadi imaju pljosnate strukove, što proizilazi od presovanja užeta (na kraju oformljenja) izmedju valjaka. Materijal za izradu čeličnih užadi je tkzv. patentirana žica (približnog sastava: C 0,4-0,9%, Si 0,15-0,30%, Mn 0,3-0,9%, Pmax 0,035%, Smax 0,035%) koja se može zaštititi pocinkovanm, što neznatno smanjuje nosivost užeta. Nazivna čvrstoća čeličnih žica je klase 160, 180 i 200 tj. 1570, 1770 i 1960 MPa (N/mm2). Razlog za višestruko veću čvrstoću žice za užad od konstrukcionih čelika (imaju čvrstoću 300-600 MPa) je delom u tehnologiji izrade koja kroz valjanje i vučenje žice daje vlaknastu strukturu, a delom i u definiciji pojma čvrstoće koja se za konstrukcione čelike odnosi na epruvetu φ10 mm (ovo se u teoriji mašinskih elemenata zove faktor apsolutnih dimenzija koji je npr. za deo prečnika φ10 mm ξ = 1, za φ25 mm ξ = 0,8-0,9, za φ100 mm ξ = 0,63-0,7, proizilazi da bi za žice prečnika npr. 0,2-2mm morao biti veći od 1). Sa korisničkog aspekta značajno je znati da je prečnik užeta onaj koji je prečnik opisanog kruga (a ne najmanji koji se može izmeriti).

35
Na slici 6.2 pokazani su načini použavanja. Istosmerno použena užad imaju linijski dodir izmedju žica, što im daje duži vek trajanja (s obzirom na habanje), ali su sklona odvrtanju pri radu (ne smeju se koristiti za priveznice). Unakrsno použena užad imaju kraći vek trajanja jer im je tačkasti dodir izmedju žica, ali su stabilnije forme (neodvrtljiva). Koje će se uže izabrati zavisi od primene, što je pokazano na slici 6.3.
Slika 6.2. Način použavanja (Zs, Sz, Zz i Ss)
Slika 6.3. Izbor smera užeta 6.1.1. Izbor čeličnih užadi Namena čeličnih užadi prvenstveni je kriterijum za izbor vrste i tipa konstrukcije. Ranije je važilo pravilo da se užad sa metalnim jezgrom koriste samo za vruće radne sredine (livnice, železare) jer je vlaknasto jezgro natopljeno sa uljem radi podmazivanja žica pri radu u takvim uslovima sklono zapaljenju užeta. Novije konstrukcije sa presovanjem užadi tokom izrade daju užad sa znatno većim metalnimn presekom i drugačijem ponašanju pri radu. Proizvodjači čeličnih užadi daju preporuke za svaki slučaj namene, koje je pogodno njihovo uže koristiti. Veći broj tanjih žica u užetu daje veću savitljivost, što je povoljno ali se žice brže habaju pa uže ima kraći vek. Užad sa debljim žicama su kruća, što im je mana. Istosmerno použena užad su pogodna samo kod pogona gde nije moguće odvrtanje. U svim katalozima proizvodjača daju se tabele tzv. računske prekidne sile užeta u zavisnosti od konstrukcije, prečnika užeta i klase materijala. Računska prekidna sila je zbir prekidnih sila pojedinih žica u užetu. Prekidna sila užeta kao celine uvek je manja od računske prekidne sile, jer žice nisu paralelno u sklopu i nikad nisu jednako zategnute. Ovaj uticaj je uzet u obzir kroz stepene

36
sigurnosti koji su prema nameni izmedju 4 i 12 (za liftove npr.) odredjeni standardima i tehničkim propisima. Veliki sistemi sigurnosti ne proizilaze od opasnosti da se uže pokida tokom jednog opterećenja, već iz zahteva za razumnim vekom trajanja.
υ =F
Fra
doz
~
Za dizaličke pogone prečnik užeta se može izračunati kao (DIN 15020). d c F≥ gde je F najveća sila u užetu (u N) a koeficijent c (c = 0,063-0,150) bira se iz tabele prema pripadajućoj pogonskoj grupi, klasi materijala užeta i vrsti použavanja (jednosmerno ili unakrsno použena užad). Vek trajanja užeta kao bitan korisnički parametar zavisi od broja savijanja užeta, koji nije samo prost zbir savijanja. Na slici 4 dat je primer gde se jedno savijanje računa na dobošu (w = 1), na prevojnom koturu 1 računa se sa w = 2, a na prevojnom koturu 2 zbog savijanja u suprotnom smislu od prethodnog w = 4.
Slika 6.4. Izračunavanje broja savijanja užeta.
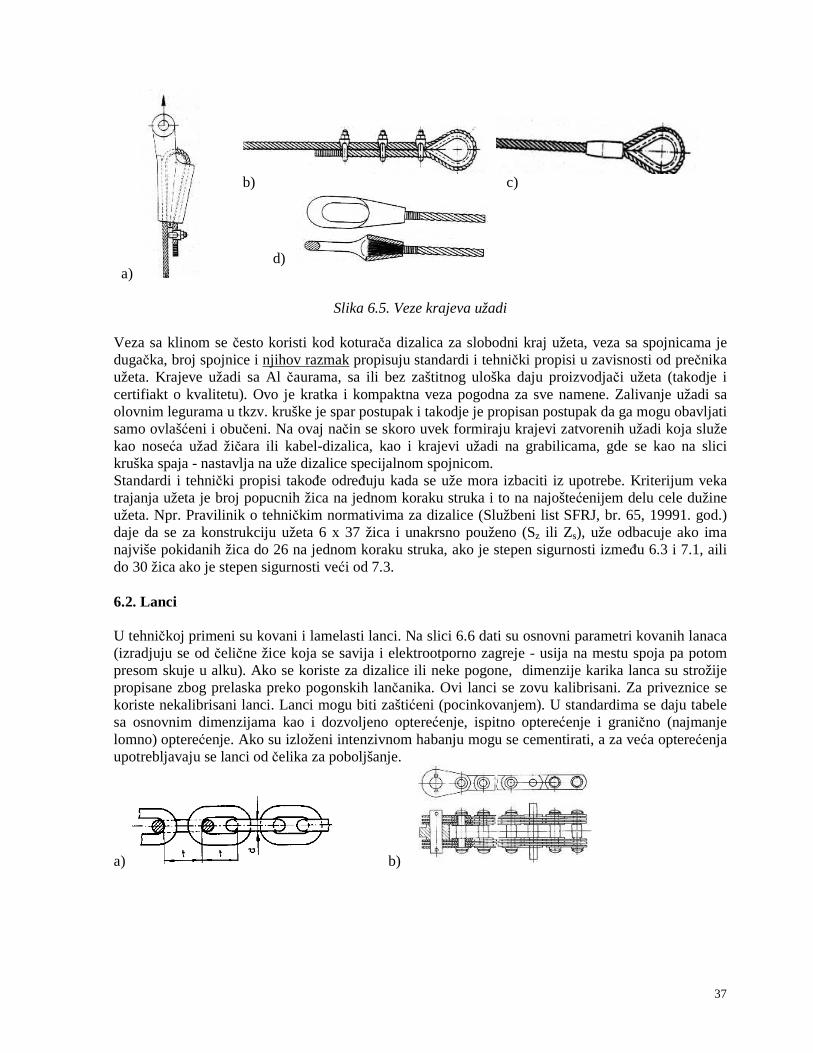
Proizilazi da se za svako podizanje tereta napravi ekvivalent od 7 savijanja užeta. Na ovaj način se može za potrebne uslove rada a na osnovu analize ciklusa rada (i kapaciteta) doći do vremena korišćenja užeta koje je još zavisno i od stepena sigurnosti (opterećenja) i odnosa prečnika užeta i koturova preko kojih se uže savija. Izračunavanje naprezanja u žicama užeta je još uvek (i pored sve računarske tehnike) izuzetno složen problem, jer zavisi od empirijskih veličina kao što je npr. prethodno zatezanje žica tokom proizvodnje. Za svako uže proizvodjači daju deklaraciju o kvalitetu, koju najčešće zahtevaju propisi za ugradnju (npr. na dizalicama). 6.1.2. Veze krajeva užadi Za korisnika je jednako važno da uže bude pravilno vezano za konstrukciju i da ta veza odgovara zahtevima propisa. Na slici 6.5 date su neke moguće izvedbe i to sa klinom (a), spojnicama (b), aluminijumskim čaurama (c) i zalivanjem (d).
w = 1 + 2 + 4 = 7
37
a)
Slika 6.5. Veze krajeva užadi Veza sa klinom se često koristi kod koturača dizalica za slobodni kraj užeta, veza sa spojnicama je dugačka, broj spojnice i njihov razmak propisuju standardi i tehnički propisi u zavisnosti od prečnika užeta. Krajeve užadi sa Al čaurama, sa ili bez zaštitnog uloška daju proizvodjači užeta (takodje i certifiakt o kvalitetu). Ovo je kratka i kompaktna veza pogodna za sve namene. Zalivanje užadi sa olovnim legurama u tkzv. kruške je spar postupak i takodje je propisan postupak da ga mogu obavljati samo ovlašćeni i obučeni. Na ovaj način se skoro uvek formiraju krajevi zatvorenih užadi koja služe kao noseća užad žičara ili kabel-dizalica, kao i krajevi užadi na grabilicama, gde se kao na slici kruška spaja - nastavlja na uže dizalice specijalnom spojnicom. Standardi i tehnički propisi takoñe odreñuju kada se uže mora izbaciti iz upotrebe. Kriterijum veka trajanja užeta je broj popucnih žica na jednom koraku struka i to na najoštećenijem delu cele dužine užeta. Npr. Pravilinik o tehničkim normativima za dizalice (Službeni list SFRJ, br. 65, 19991. god.) daje da se za konstrukciju užeta 6 x 37 žica i unakrsno použeno (Sz ili Z s), uže odbacuje ako ima najviše pokidanih žica do 26 na jednom koraku struka, ako je stepen sigurnosti izmeñu 6.3 i 7.1, aili do 30 žica ako je stepen sigurnosti veći od 7.3. 6.2. Lanci U tehničkoj primeni su kovani i lamelasti lanci. Na slici 6.6 dati su osnovni parametri kovanih lanaca (izradjuju se od čelične žice koja se savija i elektrootporno zagreje - usija na mestu spoja pa potom presom skuje u alku). Ako se koriste za dizalice ili neke pogone, dimenzije karika lanca su strožije propisane zbog prelaska preko pogonskih lančanika. Ovi lanci se zovu kalibrisani. Za priveznice se koriste nekalibrisani lanci. Lanci mogu biti zaštićeni (pocinkovanjem). U standardima se daju tabele sa osnovnim dimenzijama kao i dozvoljeno opterećenje, ispitno opterećenje i granično (najmanje lomno) opterećenje. Ako su izloženi intenzivnom habanju mogu se cementirati, a za veća opterećenja upotrebljavaju se lanci od čelika za poboljšanje.
a) b)
b) c)
d)

38
c) d) Slika 6.6. Kovani lanci (a), Gall-ovi lanci (b), Flyer lanci (c) i lanci sa rolnicama (d).
Lamelasti lanci se retko upotrebljavaju za pretovarne uredjaje, osim Flyer - lanaca koji se primenjuju za dizalice viljuškara. Postoje i posebne izvedbe lanaca za npr. konvejere i sl. 6.3. Koturi i kotura če Verovatno najstariji pribor ili uredjaj za podizanje tereta koji se nije koncepciono menjao još od faraonskih vremena su koturi i koturače. Na slici 6.7 pokazani su osnovni tipovi kotura i koturača.
Slika 6.7. Koturi i koturače
Nepokretni kotur u statičkim uslovima podrazumeva ravnotežu sile F i tereta G. Pri kretanju put sile S, jednak je sa hodom dizanja h. Pokretni kotur omogućava primenu zlatnog pravila mehanike (što se dobije na sili izgubi se na putu), tako da je zbir sila u užadima (Fs1 + Fs2) = G. Pri tome je put slobodnog kraka užeta s, dva puta veći od hoda podizanja tereta h. Diferencijalna koturača čije dejstvo počiva na razlici (diferenciji) poluprečnika r1 i r2 ima npr. ručnu silu Fh a slobodan kraj koji nailazi na deo kotura (u monobloku) sa poluprečnikom r1. Zbog prethodnog, primenljiva je samo sa lancima kao sredstvom za ostvarivanje funkcije koturače, jer bi uže klizalo pošto nema prethodnog zatezanja i teret bi pao. Nema praktičnog značaja. Na slici 6.7.d pokazano je kako se teret G deli na 4 kraka koturače (užadi) pri čemu je prenosni odnos
a) nepokretni kotur, b) pokretni kotur, c) diferencijalna koturača, d) koturača za ručno
podizanje, e) koturača na pogonskom
mehanizmu za dizanje tereta

39
i = s/h = n (za ovaj slučaj n = 4) dakle put ručne sile s je 4 puta veći od puta tereta G (ima 2 pokretna kotura). - O gubicima na koturači Pri prelasku užeta preko kotura dolazi do: − savijanja užeta, tj. pomeranja - klizanja žica u užetu, i − trenja užeta o obod kotura. Takodje se nesme zanemariti i trenje u ležaju kotura, što ukupno odredjuje gubitke u sili npr. Fs2 mora biti veće za gubitke od Fs1 da bi se teret G podizao (kod spuštanja je obrnuto). Veličina gubitaka kotura je: ηk = 0,98 za koture sa kotrljajnim ležajima i ηk = 0,96 za koture sa kliznim ležajevima Za koturaču sa slike 6.7.d, za slučaj ravnomernog dizanja biće red od parametara ηk koji se zamenjuje sumom:
G F Fk k k k kk
k= + + + = −
−( )η η η η η η
η2 3 4 1
1
4
odnosno u opštem slučaju za n krakove koturače
G F kkn
k= −
−η ηη
11
Praktične izvedbe kod dizalica date su na slici 6.7.e, gde je: vh - brzina dizanja, G - masa(težina) tereta ∆G - masa (težina) koturače, z = 2 - broj krakova koturače merodavan za izračunavanje brzina, jer se dva kraka užeta namotavaju na doboš (dužina lr je deo doboša sa zavojnicom za redjanje - namotavanje užeta), a - kotur za izjednačavanje dužine leve i desne strane užeta, vs - je brzina užadi (istovremeno i obimna brzina obrtanja doboša), Dtr - rečnik doboša. Primer izračunavanja stepena korisnosti (gubitka) koturače prema slici 7 e. Sila u užadima bez gubitaka Fo = Fbez.gtb= (G +∆G) / 2z - sila na jednom kraku (užetu)
Sila u užadima sa gubicima 12 (1 )
kn
k k
G GZF η
η η−+∆
−=
Stepen korisnosti η η ηηuk
FF ko k
n
k= = −
−11
pošto ima samo jedan pokretni kotur od kotura za izravnanje (a) koji uslovno miruje, sledi da je n = 1. pa je tada
η η ηηηuk k k
k
k= =−
−11
1
(npr. ηk = 0,98)
Za slučaj spuštanja tereta otpori pomažu zadržavanju tereta, pa za njihovu veličinu sila u užetu manja u odnosu na onu bez gubitaka. 6.3.1. Pogon preko kotura Ako je potrebno preneti obrtni moment trenjem užeta o kotur (liftovi, bitve kod brodova,...) postavlja se pitanje koje prethodno zatezanje mora imati uže da bi se preneo odgovarajući obrtni moment, ili
0
sin ( )sin 02 2
2 sin sin
n x
Iz Y sledi
d ddF F F dF
d ddF F dF Fd
α α
α α α
= ↑
− − + =
= + ≈
∑
dα/2 dα/2
αdαµ

40
ostvarila sila u drugom kraku užeta. Na slici 6.8 data je postavka problema pogonskog kotura (ili pogonske užnice) kao i primer brodske bitve koja može biti na obali kruta ili obtna (pogonska) na brodu.
Slika 6.8. Pogonski kotur Početni uslov je da je (u diferencijalnoj formi) sila trenja proizvod koeficijenta trenja i normalne sile dFµ = µ dFn. Potom prema slici sledi:
dF
Fd
F
Fe
oF
F
= ⇒ =∫∫ µ α µαα
1
2
2
Moment otpora je za Fo= F1-F2 Mo = Fo R = (F1-F2) R Na osnovu diferencijalnog segmenta dα postavljeni su uslovi ravnoteže za tangentu (x osu) i normalu (y osu), uz početni uslov koji podrazumeva da je koeficijent trenja µ = const , µ = 0,12-0,14 za čelično uže i čelični ili liveni kotur, µ = 0,25 za čelično uže i kotur od termoplastičnih materijala i µ = 0,2 za uže od kudelje i čelični ili liveni kotur. U jednačinama ravnoteže uzeto je da proizvod dve diferencijalno male veličine ∼ 0, da je sin malih uglova ∼ sin ugla i da je cos malih uglova ∼ 1. Zamenom podvučenih izraza dobija se logaritamski integral koji daje vezu sile F1 i F2 kao zavisnost prirodnog logaritma e (e =2,71828..). Npr. za µ = 0,2 i zahvatni ugao:
0,21
2
0,21
2
F(180 ) 1,87
F
2 (360 ) 3,51
o
o
e
Fe
F
π
π
α π
α π
= = =
= = =
6.4. Donji sklop koturače Donji sklop koturače je veza izmedju tereta i pogonske mašine, sa zadatkom da veličinu tereta podeli na više užadi, čime se dobijaju tanja užad sa većom brzinom namotavanja doboša. Na ovaj način se smanjuju veličine obimnih sila (na dobošu), tj.: obrtni moment je manji, a brzina obrtanja je veća (rad mora biti isti), što zahteva manju redukciju broja obrtaja od pogonskog motora ka dobošu (manje dimenzije reduktora). Na slici 6.9 je dat donji sklop koturače koji odgovara pogonskom mehanizmu za dizanje sa slike 6.7.e. Na slici se vidi kuka oslonjena preko navrtke i aksijalnog ležaja na traverzu, koja prenosi opterećenje na bočne (deblje) limove, koje na distanci drži cev, kroz koju je provučena (gore)

41
osovina. Sa obe strane na osovini su kotrljajni ležaji sa koturima zavarene izvedbe. Koturi se takodje prave od livenog gvoždja ili čelika kao i od termoplastičnih materijala (npr. SIPAS-a). 6.5. Doboši Za prijem užadi koriste se doboši koji su kod većine dizalica sa navojnom površinom radi pravilnog redjanja užeta (slika 6.10). Shodno slici 6.7.e. doboš ima dva kraka užeta, što obezbedjuje da se teret diže i spušta uvek u osi (kod namotavanja jednog kraka užeta teret se pri podizanju pomera saosno dobošu, jer se uže namotavanjem pomera). Pri tome je jedna zavojnica leva a druga desna.
Slika 6.9. Donji sklop koturače Slika 6.10. Doboš sa zupčastom spojnicom (primer) Na slici je dat primer jedne izvedene konstrukcije gde je pokazano i vezivanje krajeva užeta na početku zavojnica doboša, pri čemu 2-3 zavojka uvek ostaju namotana na dobošu, što uz 2-3 spojnice na razmaku npr. od 60o obezbedjuje sigurnost da se uže neće izvući i spasti sa doboša u donjoj poziciji tereta. Pozicije na slici su: 1 - zupčasta spojnica, 2 - cev za podmazivanje spojnice (mašću), 3,8 - čeoni limovi doboša, 4 - spojnica za vezu kraja užeta (ukupno 3 po luku 180o) 5 - doboš, zavarena cev sa narezanim zavojnim ožljebljenjem za uže, 6,7 - žljebovi za uže, 9 - zarubljena kupa za ojačanje, 10 - rukavac za ležaj. Konstrukcija doboša kao na slici oslanja se slobodnim krajem (rukavcem 10) preko samoudesivog buričastog ležaja, dok se pogonska strana preko glavčine oslanja (i pogoni) na izlazni rukavac reduktora.
a) c)

42
Slika 6.11. Kolica dizalice sa pogonskim mehanizmom za dizanje sa kukom (a) i grabilicom (b) i (c) Na slici 6.11.a data je šema kolica dizalice koja radi sa kukom, gde je: a - pogonski elektromotor, b - spojnica, c - kočnica, d -elektrohidraulični uredjaj za upravljanje radom kočnice, e - reduktor, f - doboš, g - oslonac - ležaj doboša. Kako sa slike sledi izlazno vratilo reduktora (koji ima 3 para zupčanika) ima svoja dva ležaja i doboš je direktno oslonjen (vezan) na izlazni rukavac. Pošto je reduktor jedan sklop, nikad nije moguće napraviti apsolutnu saosnost izlaznog vratila reduktora i ležaja g na slici. Zbog toga se moraju upotrebljavati spojnice koje dozvoljavaju nesaosnosti, kao i samoudesivi ležaji (g) da bi doboš imao svoju osu koja se u prostoru ukršta sa osom izlaznog vratila reduktora. U praktičnim slučajevima bilo kojih pogona treba izbegavati oslanjanje vratila na 3 ležaja, jer to vodi statičkoj neodredjenosti sistema i često lomu, zbog napona koji su proizišli iz krivljenja vratila da bi se oslonilo u tri tačke koje nisu u liniji. Naistoj slici pokazane su i koncepcije pogonskih mehanizama za dizanje grabilica, gde je potrebno dodatno kretanje da se otvori i zatvori grabilica, koja pri tome ne menja položaj po visini. Za ove namene koriste se dva nezavisna pogona (slika 6.11.b), gde je pogon sa dobošem sa više zavojaka namenjen za zatvaranje grabilice, a pogon sa manje zavojaka na dobošu, namenjen je za dizanje. Kada se grabilica podiže ili spušta, rade oba pogona istovremeno, a kada se otvara ili zatvara radi samo jedan pogon (u ovom slučaju levi). Oba pogona imaju sve elemente koji su pokazani na slici 6.11.a, (elektromotor, kočnicu, reduktor,..). Takoñe postoje i varijante sa jednim redukorom (slika 6.11.c), kada se veći elektromotor koristi za dizanje, a manji za zatvaranje grabilice. U ovom slučaju manji elektromotor za zatvaranje grabilice vezan je u reduktoru sa dobošem (za zatvaranje grabilice) preko dodatnog planetnog reduktora, koji omogućava diferencijalno dejstvo, tj da radi samo jedan ili oba doboša. Umesto zupčastih spojnica (slika 6.10), kod novijih konstrukcija često se koriste spojnice gde su izmedju ozubljenih delova prstena i čepa poredjani burići koji se koriste za ležaje (slika 6.12).
Slika 6.12. Spojnica sa burićima
Postoje konstrukcije dizalica za lučke namene gde su instalisane snage više stotina KW, sa dobošima koji su konzolno montirani na rukavac izlaznog vratila reduktora, tako da ne zahtevau nikakve

43
spojnice. U tom slučaju doboš se deli, tako da sa svake strane reduktora ima doboš sa zavojnicom u jednom smeru (za jedan krak užeta). Za pogone sa grabilicom tada ima 4 doboša. 6.6. Kočnice Neophodnost držanja tereta koji visi na užadima kao i savladjivanja inercijalnih sila pri kočenju, (usporenju) zahteva prisustvo kočnica kod svih pogonskih mehanizama za dizanje. Blagodareći savremenim elektromotornim pogonima gde se upravljanjem najčešće kočI (usporava) npr. pri spuštanju tereta uz rekuperaciju energije, uloga kočnice je da uspore(koče), pri brzinama koje su npr. od 5% od nazivne do stanja mirovanja. Kod pogona za horizontalna kretanje, kao i kod svih vozila, kočnice usporavaju kretanje, mase kočlica ili dizalice, i održavaju mirovanje u datoj poziciji (na primer sprečavaju kretanje usled dejstva vetra). Pošto kočnice imaju sigurnosnu ulogu, njima se pri izboru, projektovanju i održavanju, mora posvetiti izuzetna pažnja. Na slici 6.13 data je principijelna šema kočnice sa dobošem, gde se kod dizalice najčešće primenjuje izvodjenje pod a) sa spoljašnjim papučama dok je kod vozila češće izvodjenje pod b) sa unutrašnjim papučama. Kočnice sa spoljašnjim papučama imaju bolje hladjenje, ali zahtevaju zatvoreni prostor, ili oklop kao zaštitu od prljavštine, blata i prašine, što nije moguće osigurati kod vozila.
c)
Slika 6.13. Principijelna šema kočnica sa papučama a)-spolja, b)-iznutra i tehničko izvodjenje kočnica sa spoljašnjim papučama c).
U praktičnim izvodjenjima se koriste dve simetrične papuče, tako da je doboš opterećen samo kočionim momentom (nema savijanja vratila). Papuče su obrtne (podešljive) oko osovinice na polužnom sistemu koji otvara (širi) i zatvara (skuplja-steže) tzv. ELDRO uredjaj koji je prikazan na slici 6.14..
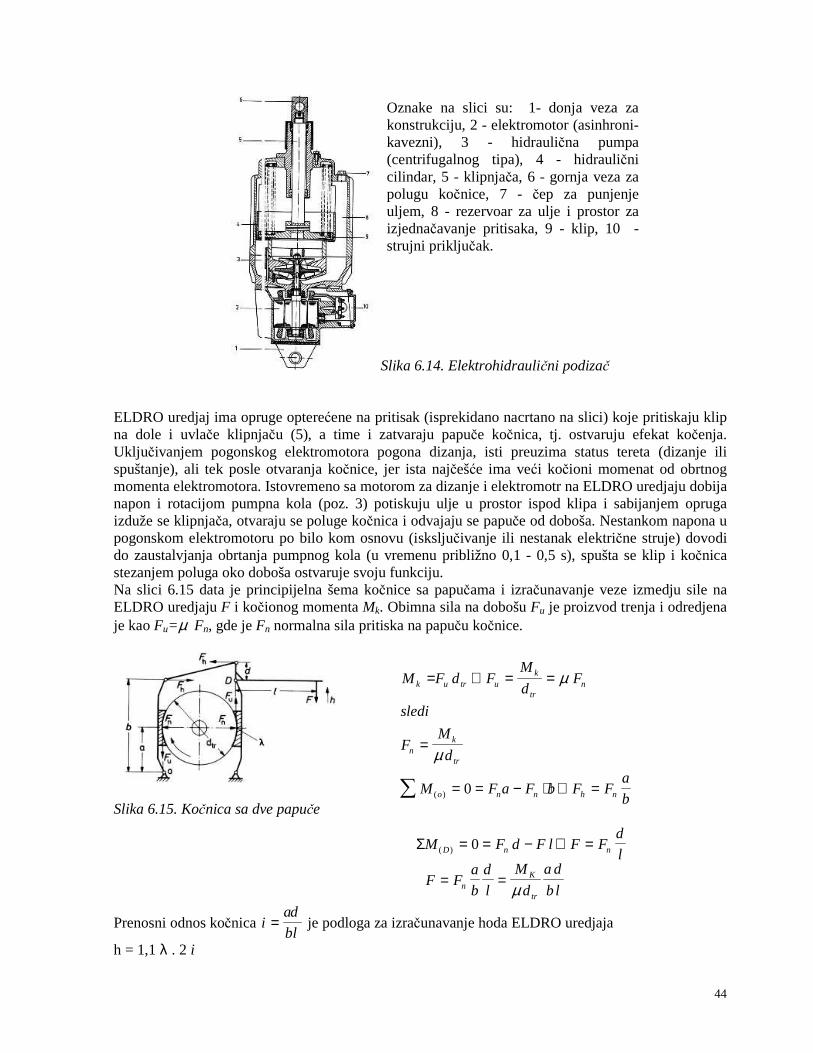
44
Slika 6.14. Elektrohidraulični podizač ELDRO uredjaj ima opruge opterećene na pritisak (isprekidano nacrtano na slici) koje pritiskaju klip na dole i uvlače klipnjaču (5), a time i zatvaraju papuče kočnica, tj. ostvaruju efekat kočenja. Uključivanjem pogonskog elektromotora pogona dizanja, isti preuzima status tereta (dizanje ili spuštanje), ali tek posle otvaranja kočnice, jer ista najčešće ima veći kočioni momenat od obrtnog momenta elektromotora. Istovremeno sa motorom za dizanje i elektromotr na ELDRO uredjaju dobija napon i rotacijom pumpna kola (poz. 3) potiskuju ulje u prostor ispod klipa i sabijanjem opruga izduže se klipnjača, otvaraju se poluge kočnica i odvajaju se papuče od doboša. Nestankom napona u pogonskom elektromotoru po bilo kom osnovu (isksljučivanje ili nestanak električne struje) dovodi do zaustalvjanja obrtanja pumpnog kola (u vremenu približno 0,1 - 0,5 s), spušta se klip i kočnica stezanjem poluga oko doboša ostvaruje svoju funkciju. Na slici 6.15 data je principijelna šema kočnice sa papučama i izračunavanje veze izmedju sile na ELDRO uredjaju F i kočionog momenta Mk. Obimna sila na dobošu Fu je proizvod trenja i odredjena je kao Fu=µ Fn, gde je Fn normalna sila pritiska na papuču kočnice.
Slika 6.15. Kočnica sa dve papuče
Prenosni odnos kočnica iad
bl= je podloga za izračunavanje hoda ELDRO uredjaja
h = 1,1 λ . 2 i
ΣM F d F l F Fd
lD n n( ) = = − ∴ =0
F Fa
b
d
l
M
d
a d
b lnK
tr
= = µ
Oznake na slici su: 1- donja veza za konstrukciju, 2 - elektromotor (asinhroni-kavezni), 3 - hidraulična pumpa (centrifugalnog tipa), 4 - hidraulični cilindar, 5 - klipnjača, 6 - gornja veza za polugu kočnice, 7 - čep za punjenje uljem, 8 - rezervoar za ulje i prostor za izjednačavanje pritisaka, 9 - klip, 10 - strujni priključak.
M F d FM
dF
sledi
FM
d
M F a F b F Fa
b
k u tr uk
trn
nk
tr
o n n h n
= ∴ = =
=
= = − ⋅ ∴ =∑
µ
µ
( ) 0

45
gde je λ = 1 - 2 mm radni zamor izmedju papuča koačnica i doboša. Kod novijih npr. lučkih dizalica sa većim pogonskim jedinicama upotrebljavaju se i disk kočnice, čija je principijelna šema pokazana na slici 6.16.
Slika 6.16. Disk kočnica ( hidraulični agregat) Za razliku od kočnica kod automobila, ovde opruge stežu papuče kočnica i ostvaruju radnu funkciju, a hidraulični sistem otvara kočnicu i omogućava obrtanje diska, tj. rad pogonskog mehanizma. Kočioni moment je (za dve tarne površine) zavisan od sile opruge F = Fo Mk = 2 Fµ rm = 2 µ F rm =2 µ rm Fopr Napomena: Kriterijum za izbor veličine kočnice nije samo kočioni moment, već i tzv. rad kočenja odnosno zagrevanje kočnice i mogućnost hladjenja kočnice. Iz navedenog razloga veličina kočnice je zavisna od pogonske klase koja je primer intenziteta rada ili još direktnije od intermitercije i broja uključivanja kočnice za npr. 1 sat, kao uslova hladjenja. Na osnovu eksperimentalnih ispitivanja poznato je da nema ravnomernog kontakta (dodira) izmedju papuča kočnica i doboša ili diska, već da se intenzivno taru (koče) samo lokalne male površine papuče gde temperatura narasta i preko 400oC. Posle otkidanja-sagorevanja tog lokalnog dela kočione podloge, u intenzivno trenje ulaze drugi lokalni elementi površine kočione papuče. Zaprljanje, naročito ulje, kao i povećanje temperature doboša (diska) smanjuje trenje i kočioni momenat. Obloge za kočnice koje su ranije radjene od azbesta, zbog kancerogenosti istog sada se prave od sintetičkih materijala. 6.7. Elektromotorni pogoni Kod najvećeg broja dizalica koje učestvuju u pretovarima i skladištenju tereta (robe) postoji mogućnost za priključenje na mrežu električne struje, pa se kao pogoni koriste elektromotori (mosne dizalice, portalne dizalice u skladištima, lučke itd.). Razvoj tehnike u poslednjih sto godina uslovio je primenu svih vrsta elektromotora, uz povremenu dominaciju nekih koji su u datom vremenskom trenutku imali najbolja svojstva prema tehničkim parametrima, mogućnosti regulacije rada, ceni, troškovima održavanja itd. Kod serijskih dizalica nosivosti do npr. 12 t. kao i kod vitala raznih vrsta koriste se asinhroni elektromotori sa kaveznim rotorom, čiji je radni dijagram dat na slici 6.17. Pri polasku-startovanju pogona, kada je broj obrtaja n = 0, elektromotor ima tzv. polazni obrtni moment M. Kako slika pokazuje moguće je više opcija, koje su odredjene klasom rotora KR5-KR16, pri čemu je KR 5 obično standardno izvodjenje za elektromotore koji se neopterećeni puštaju u rad. Ako je nazivni
1 - rezervoar za ulje, 2 - filter za ulje, 3 - ručna pumpa, 4 - nepovratni ventil, 5 - zupčasta pumpa, 6 - elektromotor, 7 - ventil za prebacivanje na ručni i elektro-pogon, 8 - sigurnosni ventil, 9 - priključak za manometar, 10 - kočioni cilindar sa oprugom, 11 - kočione obloge,12 - disk.
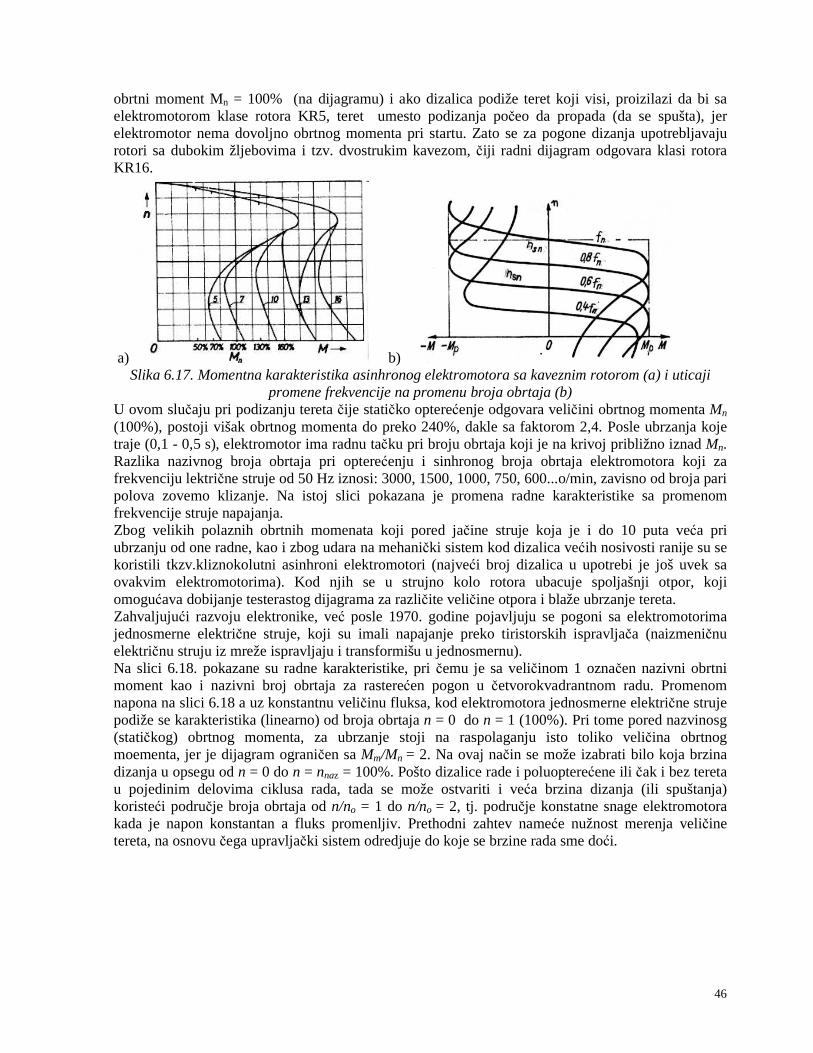
46
obrtni moment Mn = 100% (na dijagramu) i ako dizalica podiže teret koji visi, proizilazi da bi sa elektromotorom klase rotora KR5, teret umesto podizanja počeo da propada (da se spušta), jer elektromotor nema dovoljno obrtnog momenta pri startu. Zato se za pogone dizanja upotrebljavaju rotori sa dubokim žljebovima i tzv. dvostrukim kavezom, čiji radni dijagram odgovara klasi rotora KR16.
a) b) Slika 6.17. Momentna karakteristika asinhronog elektromotora sa kaveznim rotorom (a) i uticaji
promene frekvencije na promenu broja obrtaja (b) U ovom slučaju pri podizanju tereta čije statičko opterećenje odgovara veličini obrtnog momenta Mn
(100%), postoji višak obrtnog momenta do preko 240%, dakle sa faktorom 2,4. Posle ubrzanja koje traje (0,1 - 0,5 s), elektromotor ima radnu tačku pri broju obrtaja koji je na krivoj približno iznad Mn. Razlika nazivnog broja obrtaja pri opterećenju i sinhronog broja obrtaja elektromotora koji za frekvenciju lektrične struje od 50 Hz iznosi: 3000, 1500, 1000, 750, 600...o/min, zavisno od broja pari polova zovemo klizanje. Na istoj slici pokazana je promena radne karakteristike sa promenom frekvencije struje napajanja. Zbog velikih polaznih obrtnih momenata koji pored jačine struje koja je i do 10 puta veća pri ubrzanju od one radne, kao i zbog udara na mehanički sistem kod dizalica većih nosivosti ranije su se koristili tkzv.kliznokolutni asinhroni elektromotori (najveći broj dizalica u upotrebi je još uvek sa ovakvim elektromotorima). Kod njih se u strujno kolo rotora ubacuje spoljašnji otpor, koji omogućava dobijanje testerastog dijagrama za različite veličine otpora i blaže ubrzanje tereta. Zahvaljujući razvoju elektronike, već posle 1970. godine pojavljuju se pogoni sa elektromotorima jednosmerne električne struje, koji su imali napajanje preko tiristorskih ispravljača (naizmeničnu električnu struju iz mreže ispravljaju i transformišu u jednosmernu). Na slici 6.18. pokazane su radne karakteristike, pri čemu je sa veličinom 1 označen nazivni obrtni moment kao i nazivni broj obrtaja za rasterećen pogon u četvorokvadrantnom radu. Promenom napona na slici 6.18 a uz konstantnu veličinu fluksa, kod elektromotora jednosmerne električne struje podiže se karakteristika (linearno) od broja obrtaja n = 0 do n = 1 (100%). Pri tome pored nazvinosg (statičkog) obrtnog momenta, za ubrzanje stoji na raspolaganju isto toliko veličina obrtnog moementa, jer je dijagram ograničen sa Mm/Mn = 2. Na ovaj način se može izabrati bilo koja brzina dizanja u opsegu od n = 0 do n = nnaz = 100%. Pošto dizalice rade i poluopterećene ili čak i bez tereta u pojedinim delovima ciklusa rada, tada se može ostvariti i veća brzina dizanja (ili spuštanja) koristeći područje broja obrtaja od n/no = 1 do n/no = 2, tj. područje konstatne snage elektromotora kada je napon konstantan a fluks promenljiv. Prethodni zahtev nameće nužnost merenja veličine tereta, na osnovu čega upravljački sistem odredjuje do koje se brzine rada sme doći.

47
Slika 6.18. Radne karakteristike upravljanog elektromotora sa jednosmernom strujom (a) i naizmeničnom sa frekventnom regulacijom (b)
Sa aspekta upralvjanja ovim pogonima nema zamerke, ali oni imaju elektromotore sa kolektorima koji su čest uzrok zastoja pri radu. Od 1985. godine svet se ponovo vraća asinhronim kaveznim elektromotorima kao najrobusnijim za primenu, ali se isti najajaju sa naizmeničnom strujom promenljive frekvencije i to tako što su tiristorski ispravljači dobili dodatak za transformaciju jednosmerne električne struje u naizmeničnu električnu struju promenljive frekvencije i time postali tiristorski pretvarači. Na slici 6.18.b, pokazana je radna karatkeristika ovakvih elektromotornih pogona kod kojih se takodje koristi samo područje do obrtnog momenta M/Mn = 2. Promenom napona i frekvencije linearno raste broj obrtaja n/no =1 što odgovara krivoj sa slike 6.17. Za postizanje većih brzina rada (sa manjim teretima) koristi se područje konstantne snage gde je napon konstantan a frekvencija promenljiva. Na slici 6.18 ucrtane su radne karakteristike samo u I i IV kvadrantu jer se oni koriste za dizanje i spuštanje tereta. Kod npr. kočenje pri spuštanju tereta, rukovalac ili upravljački sistem smanjuje broj obrtaja od radne tačke prema n = 0, čime se pogon koči promenom strujnih parametara elektromotora uz rekuperaciju energije. Za pogone horizontalnih kretanja uglavnom se ne koristi područje konstatne snage, jer je često masa tereta znatno manja od horizontalno pokretnih masa, dakle u tim uslovima pogonski motor uvek ima i preko polovine od nazivnog opterećenja. Tada je prisutan četvorokvadrantni rad, pri čemu je I kvadrant za ubrzanje, a II za kočenje. - O intermitenciji (slika 6.19) Pošto se svi motori odabiraju i dimenzionišu na osnovu veličina potrebnih obrtnih momenata, snaga kao energijski parametar služi za kontrolu zagrevanja. Na slici 6.19 pokazan je dijagram koji na osnovu procenjenih uslova rada za period od 600 s definiše za koji deo od tog vremena namot elektromotora sme postići najveću dozvoljenu temperaturu Tdoz. Ako elektromotor radi samo 90s, pa se do 600 s hladi, tada je to intermitenca ED 15% i elektromotor se sme više opteretiti. Po definiciji intermitencija se vezuje za ciklus rada i predstavlja odnos stvarnog vremena rada elektromotora i vremena ciklusa rada ED = (suma tr / T) 100 %. Povećanjem vremena aktivnog rada jednog pogona unutar normiranog ciklusa od 600 s povećava se i njegovo zagrevanje i smanjuje raspoloživo vreme za hladjenje, pa se stoga smanjuje dozvoljena snaga, tako da će i zagrevanje za npr. 360 s kod ED 60% tek dostići Tdoz i imaće dovoljno vremena da
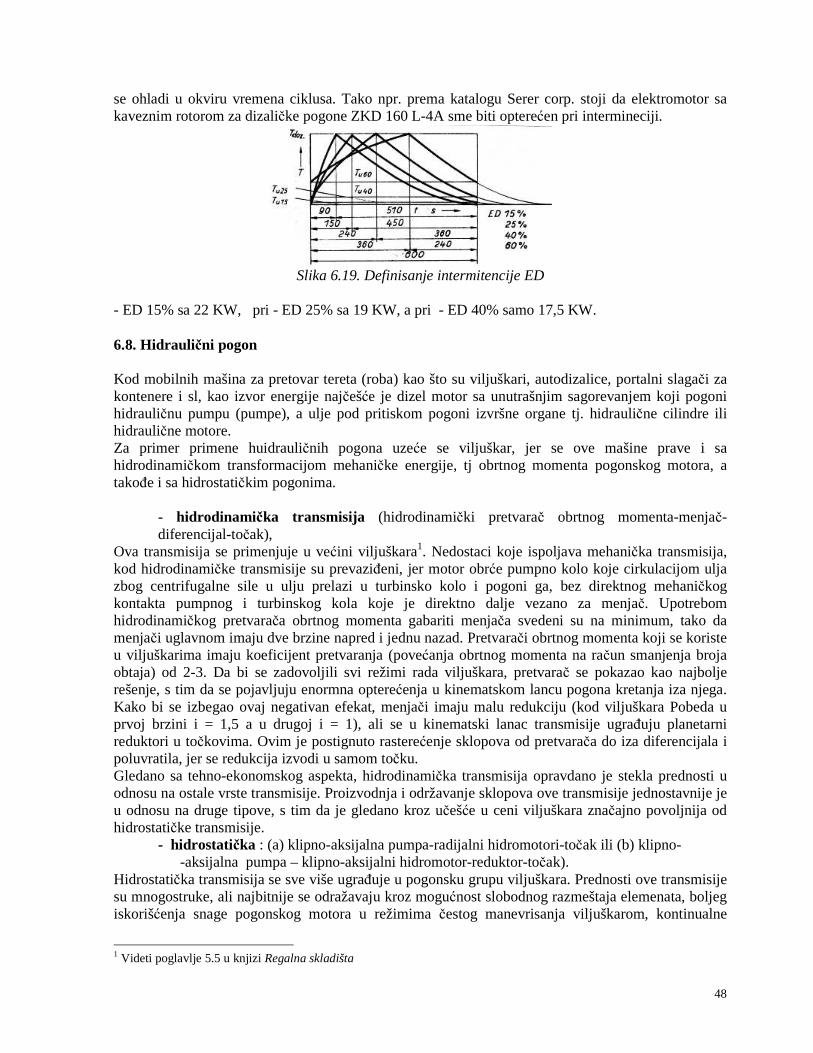
48
se ohladi u okviru vremena ciklusa. Tako npr. prema katalogu Serer corp. stoji da elektromotor sa kaveznim rotorom za dizaličke pogone ZKD 160 L-4A sme biti opterećen pri intermineciji.
Slika 6.19. Definisanje intermitencije ED
- ED 15% sa 22 KW, pri - ED 25% sa 19 KW, a pri - ED 40% samo 17,5 KW. 6.8. Hidraulični pogon Kod mobilnih mašina za pretovar tereta (roba) kao što su viljuškari, autodizalice, portalni slagači za kontenere i sl, kao izvor energije najčešće je dizel motor sa unutrašnjim sagorevanjem koji pogoni hidrauličnu pumpu (pumpe), a ulje pod pritiskom pogoni izvršne organe tj. hidraulične cilindre ili hidraulične motore. Za primer primene huidrauličnih pogona uzeće se viljuškar, jer se ove mašine prave i sa hidrodinamičkom transformacijom mehaničke energije, tj obrtnog momenta pogonskog motora, a takoñe i sa hidrostatičkim pogonima.
- hidrodinami čka transmisija (hidrodinamički pretvarač obrtnog momenta-menjač-diferencijal-točak),
Ova transmisija se primenjuje u većini viljuškara1. Nedostaci koje ispoljava mehanička transmisija, kod hidrodinamičke transmisije su prevaziñeni, jer motor obrće pumpno kolo koje cirkulacijom ulja zbog centrifugalne sile u ulju prelazi u turbinsko kolo i pogoni ga, bez direktnog mehaničkog kontakta pumpnog i turbinskog kola koje je direktno dalje vezano za menjač. Upotrebom hidrodinamičkog pretvarača obrtnog momenta gabariti menjača svedeni su na minimum, tako da menjači uglavnom imaju dve brzine napred i jednu nazad. Pretvarači obrtnog momenta koji se koriste u viljuškarima imaju koeficijent pretvaranja (povećanja obrtnog momenta na račun smanjenja broja obtaja) od 2-3. Da bi se zadovoljili svi režimi rada viljuškara, pretvarač se pokazao kao najbolje rešenje, s tim da se pojavljuju enormna opterećenja u kinematskom lancu pogona kretanja iza njega. Kako bi se izbegao ovaj negativan efekat, menjači imaju malu redukciju (kod viljuškara Pobeda u prvoj brzini i = 1,5 a u drugoj i = 1), ali se u kinematski lanac transmisije ugrañuju planetarni reduktori u točkovima. Ovim je postignuto rasterećenje sklopova od pretvarača do iza diferencijala i poluvratila, jer se redukcija izvodi u samom točku. Gledano sa tehno-ekonomskog aspekta, hidrodinamička transmisija opravdano je stekla prednosti u odnosu na ostale vrste transmisije. Proizvodnja i održavanje sklopova ove transmisije jednostavnije je u odnosu na druge tipove, s tim da je gledano kroz učešće u ceni viljuškara značajno povoljnija od hidrostatičke transmisije.
- hidrostatička : (a) klipno-aksijalna pumpa-radijalni hidromotori-točak ili (b) klipno- -aksijalna pumpa – klipno-aksijalni hidromotor-reduktor-točak).
Hidrostatička transmisija se sve više ugrañuje u pogonsku grupu viljuškara. Prednosti ove transmisije su mnogostruke, ali najbitnije se odražavaju kroz mogućnost slobodnog razmeštaja elemenata, boljeg iskorišćenja snage pogonskog motora u režimima čestog manevrisanja viljuškarom, kontinualne
1 Videti poglavlje 5.5 u knjizi Regalna skladišta
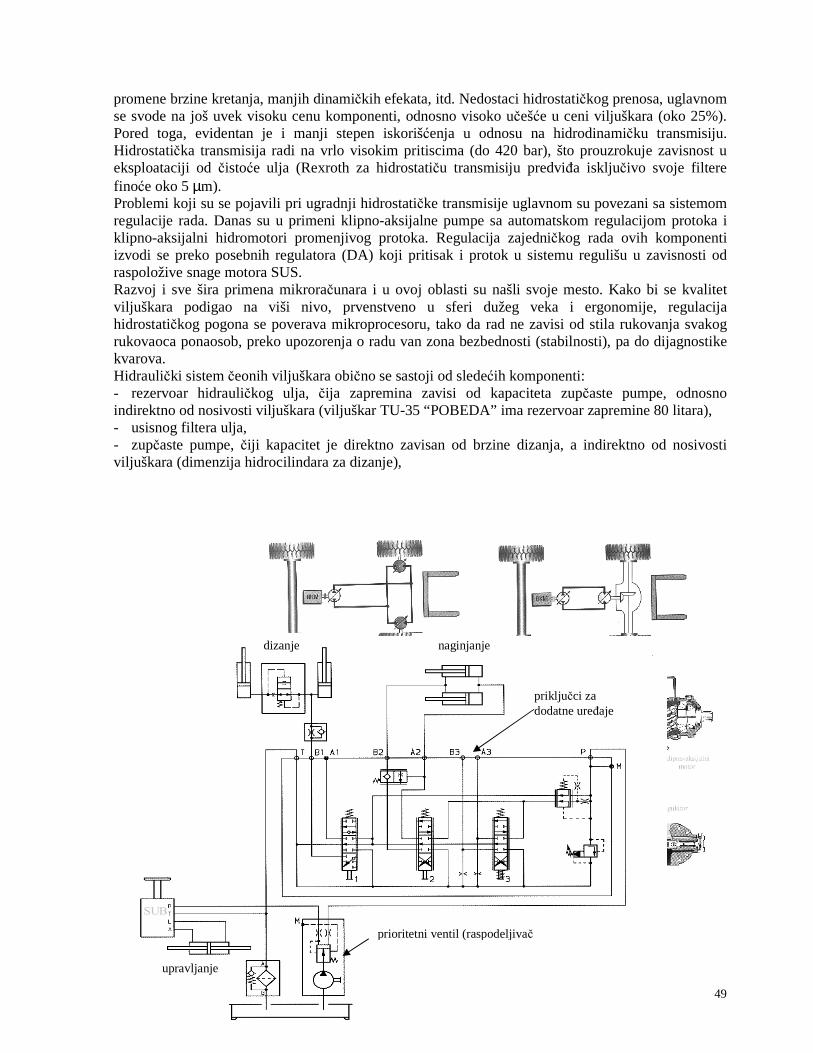
49
promene brzine kretanja, manjih dinamičkih efekata, itd. Nedostaci hidrostatičkog prenosa, uglavnom se svode na još uvek visoku cenu komponenti, odnosno visoko učešće u ceni viljuškara (oko 25%). Pored toga, evidentan je i manji stepen iskorišćenja u odnosu na hidrodinamičku transmisiju. Hidrostatička transmisija radi na vrlo visokim pritiscima (do 420 bar), što prouzrokuje zavisnost u eksploataciji od čistoće ulja (Rexroth za hidrostatiču transmisiju predviña isključivo svoje filtere finoće oko 5 µm). Problemi koji su se pojavili pri ugradnji hidrostatičke transmisije uglavnom su povezani sa sistemom regulacije rada. Danas su u primeni klipno-aksijalne pumpe sa automatskom regulacijom protoka i klipno-aksijalni hidromotori promenjivog protoka. Regulacija zajedničkog rada ovih komponenti izvodi se preko posebnih regulatora (DA) koji pritisak i protok u sistemu regulišu u zavisnosti od raspoložive snage motora SUS. Razvoj i sve šira primena mikroračunara i u ovoj oblasti su našli svoje mesto. Kako bi se kvalitet viljuškara podigao na viši nivo, prvenstveno u sferi dužeg veka i ergonomije, regulacija hidrostatičkog pogona se poverava mikroprocesoru, tako da rad ne zavisi od stila rukovanja svakog rukovaoca ponaosob, preko upozorenja o radu van zona bezbednosti (stabilnosti), pa do dijagnostike kvarova. Hidraulički sistem čeonih viljuškara obično se sastoji od sledećih komponenti: - rezervoar hidrauličkog ulja, čija zapremina zavisi od kapaciteta zupčaste pumpe, odnosno indirektno od nosivosti viljuškara (viljuškar TU-35 “POBEDA” ima rezervoar zapremine 80 litara), - usisnog filtera ulja, - zupčaste pumpe, čiji kapacitet je direktno zavisan od brzine dizanja, a indirektno od nosivosti viljuškara (dimenzija hidrocilindara za dizanje),
Hidrostatička transmisija viljuškara
(b) (a)
priključci za dodatne ureñaje
naginjanje dizanje
prioritetni ventil (raspodeljivač protoka)
upravljanje
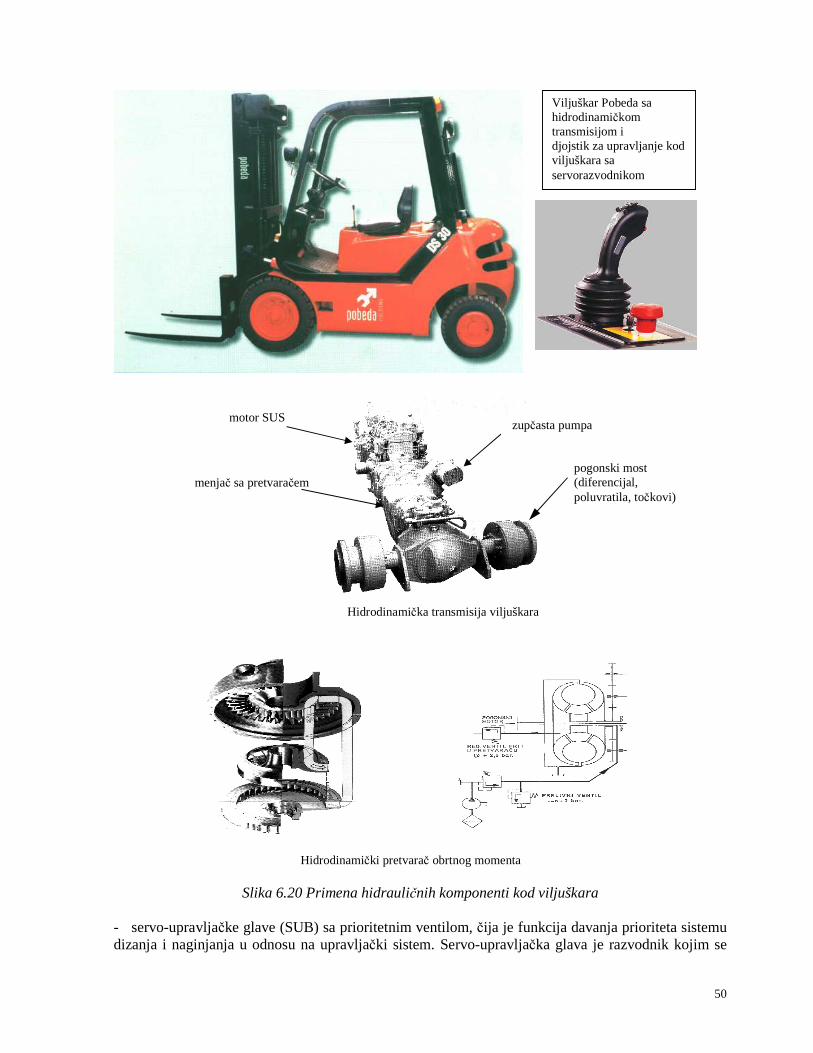
50
Slika 6.20 Primena hidrauličnih komponenti kod viljuškara - servo-upravljačke glave (SUB) sa prioritetnim ventilom, čija je funkcija davanja prioriteta sistemu dizanja i naginjanja u odnosu na upravljački sistem. Servo-upravljačka glava je razvodnik kojim se
Viljuškar Pobeda sa hidrodinamičkom transmisijom i djojstik za upravljanje kod viljuškara sa servorazvodnikom
Hidrodinamička transmisija viljuškara
pogonski most (diferencijal, poluvratila, točkovi)
menjač sa pretvaračem
motor SUS zupčasta pumpa
Hidrodinamički pretvarač obrtnog momenta

51
komanduje ručno, preko točka upravljača (volana), čime se dobija željeno kretanje klipa hidrocilindra za upravljanje, odnosno zakretanje upravljačkih točkova viljuškara, - razvodnika, koji u osnovnoj varijanti viljuškara ima dve sekcije (dizanje i naginjanje), dok se u slučaju opremanja viljuškara dodatnim ureñajima ugrañuju 3, 4, ili 5-to sekcijski razvodnici, u zavisnosti od broja mogućih kretanja dodatnog ureñaja, - hidrocilindara za dizanje (jednosmerni ili plunžeri), - hidrocilindara za naginjanje dizalice (dvosmerni), - hidrocilindra za upravljanje, - diferencijalnog prigušnog ventila za lagano spuštanje tereta u slučaju pucanja creva i regulisanje brzine spuštanja tereta, - crevovoda i cevovoda.
Maksimalni pritisak u hidrauličkom sistemu obično je limitiran na 160 bar, mada se u novije vreme primenjuju sistemi sa max.pritiskom do 220 bar. Primena hidrauličkih sistema sa pritiscima preko 200 bar rezultuje smanjenjem prečnika hidrocilindara, a zatim i smanjenjem kapaciteta zupčaste pumpe. U novije vreme, u hidraulički sistem viljuškara ugrañuju se servo-proporcionalni razvodnici sa džojstikom umesto standardnih razvodnika. Ovakvi ureñaji pružaju lakoću rukovaocu prilikom komandovanja radnim ureñajima viljuškara. Jednom ručicom (džojstikom) razvodnika, moguće je komandovati sa 6 nezavisnih kretanja radnih ureñaja viljuškara, što je za sadašnje potrebe, pri upotrebi dodatnih ureñaja sasvim dovoljno. 6.9. Statika i dinamika pogona
Slika 6.21. Elektromotorno vitlo
Kod svih pogonskih mehanizama jasno se uočava što su to statički otpori kretanju, medjutim za promene stanja sistema (ubrzanje ili kočenje) potrebne su dodatne sile koje najčešće stvaraju nedoumice. Na slici 6.21 dat je kompaktni pogonski mehanizam za dizanje (vitlo) gde je: 1 - kućište reduktora, 2 - unutrašnje ojačanje doboša za ležaj i vezu sa reduktorom, 3 - zupčasti prenosnik (reduktor), 4 - doboš, 5,6 - kućište vitla (za vezu sa konstrukcijom), 7 - redjalica užeta, 8 - spojni nosač, 9 - poklopac, 10 - elektroorman, 11 - prirubnice elektromotora, 12 - stator sa namotima, 13 - konusni rotor sa konusnom kočnicom, 14 - tarna (konusna) površina na kućištu elektromotora, 15 - opruga. Kod ovakvih kompaktnih izvedbi rotor je aksijalno pokretan i ako nema napona u namotu motora, opruga (poz.15) potiskuje rotor desno i konusni deo kočnice sa oblogom od frikcionog materijala (poz.13) pritiskuje na kućište (poz.14) i stvara kočioni moment. Uključivanjem električne energije stvara se magnetno polje koje povlači rotor levo i time oslobadja kočnicu, čime je omogućeno

52
obrtanje rotora. Obrtanje rotora preko dva cilindrična zupčasta para sa spoljašnajim ozubljenjem i jednim zupčastim parom sa unutrašnjim ozubljenjem obrće doboš i diže (ili spušta) teret. Nestankom napona u statoru elektromotora, opruga (poz.15) potiskuje rotor desno i preko konusne kočnice zaustavlja se kretanje. Za analizu statičkih i dinamičkih veličina obrtnih momenata za prethodni slučaj data je šema. Statički obrtni moment za držanje tereta koji visi (ηd =1) ili se ravnomerno diže (ηd = 0,98-0,99).
M FD
sd
ud
d
=2
1
η - obrtni moment na dobošu (ηd su gubici na dobošu)
MM
isEM s
d
R R
=η
- obrtni moment na vratilo eletromotora (iR - prenosni odnos reduktora, ηR-
gubici u reduktoru)
M QD
im g
D
isEM d
R d R
d
R d R
= =2
1 1
2
1 1
η η η η
U procesu ubrzanja potreban je i obrtni moment za savladjivanje inercijalnih sila translatornih masa tereta Q i rotacionih masa i ro: doboša sa momentom inercije Jd, zupčanika Z1 do Z2 sa pripadajućim momentima inercije i rotora elektromotora i kočnice sa momentom inercije JEM +JK. Md = Md
tr + Md
r

53
Inercijalna sila atereta je Fin = m a = m v/tu (v - brzina dizanja, tu - vreme ubrzanja)
M FD
mv
t
Ddtr d
ind
d u
d
d
, = =2
12
1η η
- na vratilu doboša
MM
im
v
t
Ddtr EM d
tr d
R R u
d
d R
,,
= =η η η21
- na vratilu elektromotora
Veza ugaone brzine rotora elektromotora i brzine dizanja - Prenosni odnosi:
i i i iz
z
z
z
z
zRD D
= = = ⋅ ⋅ =1 2 32
1
4
3
6
5
1
2
2
3
3 1ωω
ωω
ωω
ωω
sledi
vD D
id
dd
R
= =2 2
1ωω
M mt
D
idtr EM
u
d
R d R
, =ω
η η1
2
241 1
M J Jtd
r
u
= =ωω
- opšti izraz za inercijalni moment rotacionih masa
J = m R2 za prstenaaste delove,
JmR
=2
2 - za valjak
Svodjenje momenata inercije rotacionih masa na prvo vratilo preko izraza za kinetičku energiju (tzv. redukovani moment inercije) J J J J J J J J J
J J J J J J J
J JJ J
i
J J
i i
J
i
r EM K dd
r I dd
r Id
RL
ωω ω ω ω ω
ωω
ωω
ωω
ωω
12
112 2
3
22 4 3
32 2
1
1
1
22 3
2
1
24 5
3
1
2
1
2
2 3
12
4 5
12
22
2 2 2 2 22=
+ ++
++
++
= + + + +
= ++
++
+
/: (. )
( ) ( )( ) ( )( ) ( )
Ako je prenopsni odnos jednog zupčastog para i ≅ 3 - 5, proizilazi da je uticaj inercije zupčanika z2 i z3 samo 1/9 - 1/25 deo njihovog momenta inercije, a npr. uticaj doboša za npr. iR = 60 samo 1/60 2, što je zanemarljivo, pa se uticaji sporohodih vratila uzimaju u obzir koeficijentom α =1,1-1,2 u odnosu na moltorsko vratilo Jr = α JI
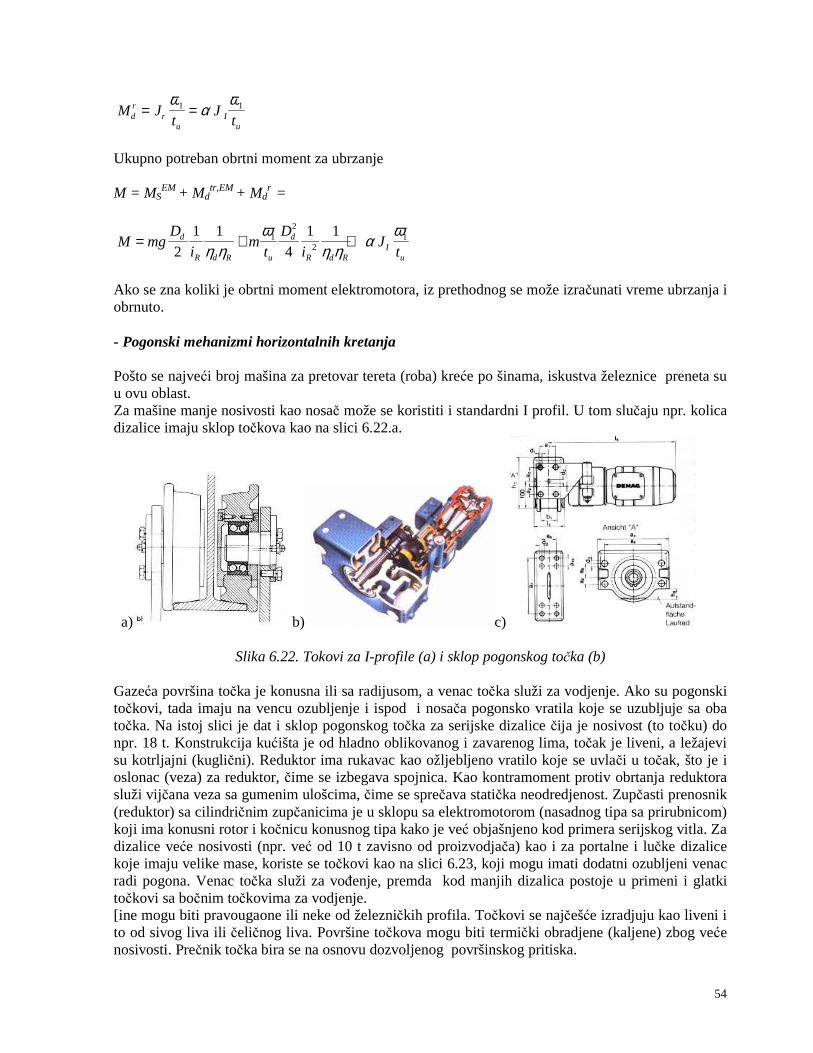
54
M Jt
Jtd
rr
uI
u
= =ω
αω1 1
Ukupno potreban obrtni moment za ubrzanje M = MS
EM + Mdtr,EM + Md
r =
M mgD
im
t
D
iJ
td
R d R u
d
R d RI
u
= + +2
1 14
1 112
21
η ηω
η η αω
Ako se zna koliki je obrtni moment elektromotora, iz prethodnog se može izračunati vreme ubrzanja i obrnuto. - Pogonski mehanizmi horizontalnih kretanja Pošto se najveći broj mašina za pretovar tereta (roba) kreće po šinama, iskustva železnice preneta su u ovu oblast. Za mašine manje nosivosti kao nosač može se koristiti i standardni I profil. U tom slučaju npr. kolica dizalice imaju sklop točkova kao na slici 6.22.a.
a) b) c)
Slika 6.22. Tokovi za I-profile (a) i sklop pogonskog točka (b) Gazeća površina točka je konusna ili sa radijusom, a venac točka služi za vodjenje. Ako su pogonski točkovi, tada imaju na vencu ozubljenje i ispod i nosača pogonsko vratila koje se uzubljuje sa oba točka. Na istoj slici je dat i sklop pogonskog točka za serijske dizalice čija je nosivost (to točku) do npr. 18 t. Konstrukcija kućišta je od hladno oblikovanog i zavarenog lima, točak je liveni, a ležajevi su kotrljajni (kuglični). Reduktor ima rukavac kao ožljebljeno vratilo koje se uvlači u točak, što je i oslonac (veza) za reduktor, čime se izbegava spojnica. Kao kontramoment protiv obrtanja reduktora služi vijčana veza sa gumenim ulošcima, čime se sprečava statička neodredjenost. Zupčasti prenosnik (reduktor) sa cilindričnim zupčanicima je u sklopu sa elektromotorom (nasadnog tipa sa prirubnicom) koji ima konusni rotor i kočnicu konusnog tipa kako je već objašnjeno kod primera serijskog vitla. Za dizalice veće nosivosti (npr. već od 10 t zavisno od proizvodjača) kao i za portalne i lučke dizalice koje imaju velike mase, koriste se točkovi kao na slici 6.23, koji mogu imati dodatni ozubljeni venac radi pogona. Venac točka služi za voñenje, premda kod manjih dizalica postoje u primeni i glatki točkovi sa bočnim točkovima za vodjenje. [ine mogu biti pravougaone ili neke od železničkih profila. Točkovi se najčešće izradjuju kao liveni i to od sivog liva ili čeličnog liva. Površine točkova mogu biti termički obradjene (kaljene) zbog veće nosivosti. Prečnik točka bira se na osnovu dozvoljenog površinskog pritiska.
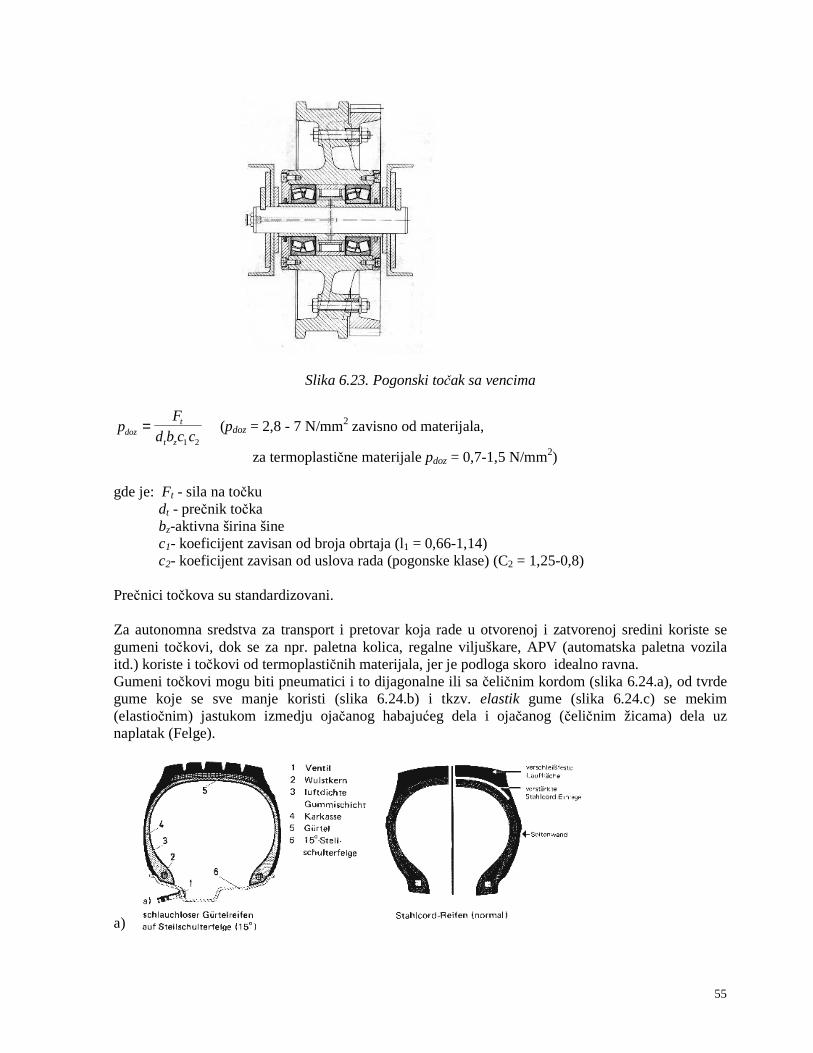
55
Slika 6.23. Pogonski točak sa vencima
pF
d b c cdozt
t z
=1 2
(pdoz = 2,8 - 7 N/mm2 zavisno od materijala,
za termoplastične materijale pdoz = 0,7-1,5 N/mm2) gde je: Ft - sila na točku dt - prečnik točka bz-aktivna širina šine c1- koeficijent zavisan od broja obrtaja (l1 = 0,66-1,14) c2- koeficijent zavisan od uslova rada (pogonske klase) (C2 = 1,25-0,8) Prečnici točkova su standardizovani. Za autonomna sredstva za transport i pretovar koja rade u otvorenoj i zatvorenoj sredini koriste se gumeni točkovi, dok se za npr. paletna kolica, regalne viljuškare, APV (automatska paletna vozila itd.) koriste i točkovi od termoplastičnih materijala, jer je podloga skoro idealno ravna. Gumeni točkovi mogu biti pneumatici i to dijagonalne ili sa čeličnim kordom (slika 6.24.a), od tvrde gume koje se sve manje koristi (slika 6.24.b) i tkzv. elastik gume (slika 6.24.c) se mekim (elastiočnim) jastukom izmedju ojačanog habajućeg dela i ojačanog (čeličnim žicama) dela uz naplatak (Felge). a)

56
b) c)
Slika 6.24. Gumeni točkovi: a-pneumatici (dijagonalni i sa čeličnim kordom), b) sa tvrdom gumom i c) elastik točak
Točkovi sa pneumaticima upotrebljavaju se za otvorene terene gde su prisutne veće neravnine na betonu ili asfaltu (viljuškari, mašine za pretovar kontenera i sl.), dok se npr. elastik točkovi upotrebljavaju za viljuškare u zatvorenim halama npr. robno-transportnih centara. Autodizalice imaju uvek pneumatike. Oznake pneumatika videti u odgovarajućoj literaturi. - Otpori kretanju Na slici 6.25 data je osnovna šema za analizu otpora pri kretanju po ravnoj po dlozi. Otpor W je:
gde je: FT - sila koja opterećuje točak, f - koeficijent otpora kotrljanju (ima dužinsku dimenziju), µ - koeficijent otpora u ležajima (µ ≅ 0,003), MW - obrtni moment od sile otpora W. Ako čelični točkovi imaju vence za vodjenje (što je najčešće), tada se trenje venca točka o šinu procenjuje i uzima parametrom β = 1,5-2. U standardima za proračun dizalica (DIN 15018, EN 13001, 13002 i dr.) se umesto koeficijenta β, ovaj dodatni otpor odredjuje na osnovu mogućeg zakošavanja konstrukcije koje proizilazi iz zazora izmedju točka i šine (do venca), dimenzija konstrukcije i njenih tolerancija. Za grube proračune uzima se ovaj otpor kao faktor težine transportnog sredstva (sila na točkovima) i to: FW = W G gde je W = 0,005 - 0,012 za kotrljajne ležaje i čelične točkove sa vencima, W = 0,012-0,014 kod elastik gumenih točkova i W = 0,014-0,025 kod pneumatika (zavisno od pritiska u gumama) Ako se transportno sredstvo kreće po nagnutoj površini, dodatni otpor je Wnag= G sinα, gde je α - ugao nagiba
WF
Rf
d
M W R
t
T
l
W T
= +
=
( )µ β2
Slika 6.25. Otpor kretanju točka
FT
V
W
f
Rtd
l
Mw

57
Otpori vetra su odredjeni na osnovu pritiska vetra (p), površine izložene vetru (A) i tkzv. koeficijenta sisanja (c). Wvet = p A c Ukupni statički moment od otpora kretanja je MW = (W + Wnag + Wvet) RT U analizi dinamničkih otpora mora se uzeti i inercija pokretnih masa, koje mogu biti od nekoliko tona i do više stotina tona, što se odredjuje slično kao u prethodnom slučaju, s tim što je sila inercije
F m a mv
tinu
= = ⋅.
Obrtni moment na pogonskom motoru je
M F Rid
trin T
R uk
=1 1
η
gde je iR - prenosni odnos reduktora sa ukupnim stepenom korisnosti (gubitaka) ηuk - u pogonskom sklopu) Dinamički obrtni moment koji proizilazi od rotacionih masa je
M J Jtd
rr r
n
= =ωω
kod svodjenja momenata inercije na redukovani Jr kao i malopre, važi da je uticaj npr. inercije točka
na motorskom vratilu umanjen za kvadrat prenosnog odnosa reduktora J
iT
R2 , tj. da se ovaj brojno
najveći moment inercije deli sa iR2.
Snaga kao energijski parametar je P = F . v = M ω Ako je sila težine ili otpora F u N , brzina v u m/s, snaga je u W (M - Nm , a ω - rad/s) - O proklizavanjau točkova Izuzetno važan faktor koji proizilazi od predimenzionisanih jačina pogonskih motora ili (naročito) kočnica. Ako je veličina pogonskog ili kočionog obrtnog momenta veća od granice klizanja, doći će do snažnih habanja točkova (i šina). Ovo je bitno kod analize opterećenja točkova, jer se zbog položaja tereta i inercije pri kretanju, pogonski točkovi dodatno rasterećuju i sila pritiska ne može da proizvede potrebnu athezionu silu Fgr = FT µgr koja je za klizni par točak i šina odredjena sa µgr ≅ 0,2-0,5.

58
- O problemu stabilnosti Najveći broj mašina za pretovar (viljuškari, regalne dizalice tj.) ima visoka težišta zbog zahteva rada, tako da se pri projektovanju mora dokazati stabilnost, na koju se naročito odražava veličina kočionih efekata koje izazivaju velike inercijalne sile uz npr. nepovoljan vetar pri radu. Korisnici moraju poštovati pravila pri radu, jer nesreće sa npr. preturenim (havarisanim) dizalicama uglavnom u pozadini imaju propuste pri radu ili održavanju.
Moment stabilnosti Uslov stabilnosti Ms = Σ G a = Σ m g a Ms > Mp Moment preturanja Mp = Σ m a b
Slika 6.26. Stabilnost transportnih ureñaja
FH
ΣG
aa
mavetar
Gb
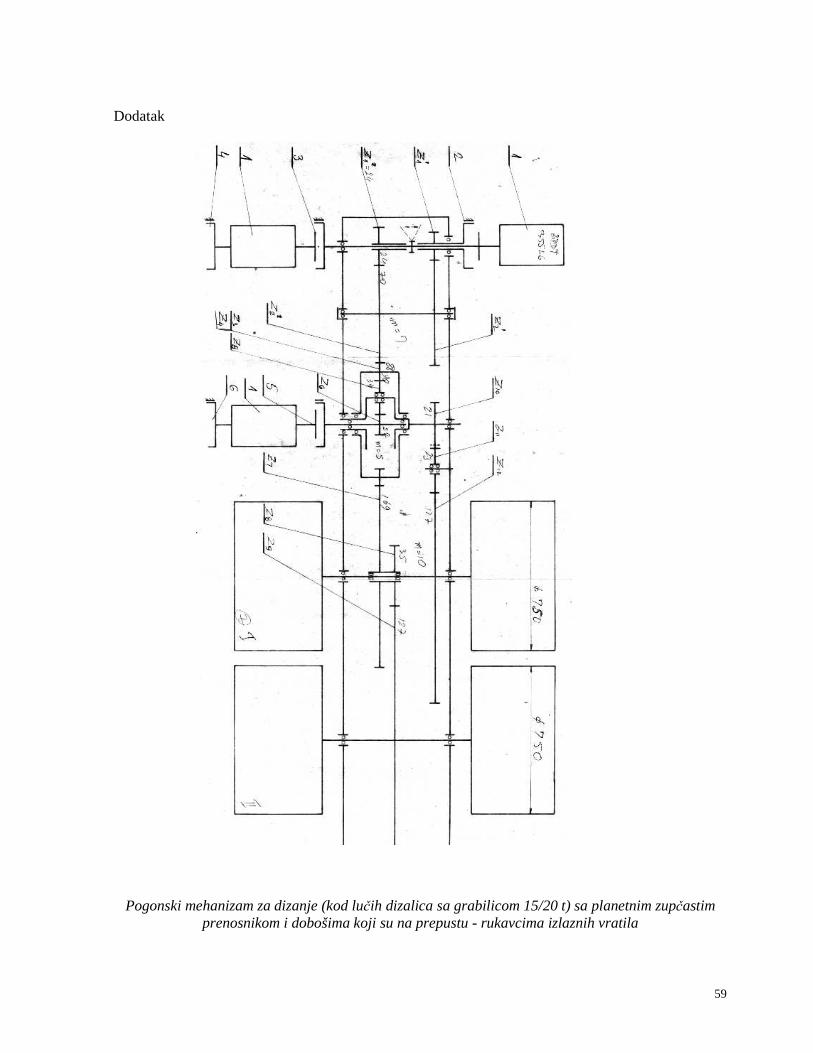
59
Dodatak
Pogonski mehanizam za dizanje (kod lučih dizalica sa grabilicom 15/20 t) sa planetnim zupčastim prenosnikom i dobošima koji su na prepustu - rukavcima izlaznih vratila

60
Portalne obalske dizalice za rad sa rasutim teretima (grabilicom) u EMO Rotterdam (jedna 85 t i dve od 50 t nosivosti)
Semi-submersible vessel crane na naftnoj platformi sa 7 000 t nasivosti na radijusu do 40m, 2 500 t na radijusu od 113 m,
900 t nosivosti na radijusu od 113 m i 120 t na radijusu od 150 m (1990. godine najveća dizalica na svetu)

61
Brodske dizalice (primer sa grabilicama)
Porztalna dizalica sa gumenim točkovima sa automatizovanim vozilom (AGV) i portalni slagač Portalna dizalica sa gumenim točkovima sa automatizovanim vozilom (AGV) i portalni slagač

62
Monitorski sistemi autodizalica
Daljinsko upravljanje (telekomande)

63
Hidraulične teleskopske dizalice koje se montiraju na kamione