4. gli stumenti di misura automatizzati e le macchine di misura
DESCRIPTION
tecnologie industrialiTRANSCRIPT

Ing. L. Romoli
STRUMENTI DI MISURA STRUMENTI DI MISURA AUTOMATIZZATI AUTOMATIZZATI
E E
LE MACCHINE DILE MACCHINE DIMISURAMISURA
A CONTROLLO NUMERICOA CONTROLLO NUMERICO
Ing. L. Romoli
Cenni storiciCenni storici
• Il primo CN è nato per scopi metrologici (1960) • La prima CMM fu costruita in Inghilterra 1960,
in USA nel 1962 e nel 1963 in Italia.• Tappe significative:
– 1965 primo tastatore elettronico– 1968 calcolatore di processo e assi controllati– 1970 minicalcolatore di processo– 1970 guide con pattini pneumostatici– 1973 ciclo di collaudo automatico ripetitivo– 1974 cambio automatico dei tastatori

Ing. L. Romoli
Il controllo del pezzo lavorato può Il controllo del pezzo lavorato può essere condotto tramite lessere condotto tramite l’’uso delle uso delle seguenti tipologie di strumenti:seguenti tipologie di strumenti:
•• strumenti manualistrumenti manuali
•• strumenti automatizzati (rigidi)strumenti automatizzati (rigidi)
•• macchine di misura a CNmacchine di misura a CN
Strumenti di controllo dimensionaleStrumenti di controllo dimensionale

Ing. L. Romoli
Misura automatizzataMisura automatizzata

Ing. L. Romoli
Il controllo del pezzo lavorato può Il controllo del pezzo lavorato può essere condotto tramite lessere condotto tramite l’’uso delle uso delle seguenti tipologie di strumenti:seguenti tipologie di strumenti:
•• strumenti manualistrumenti manuali
•• strumenti automatizzati (rigidi)strumenti automatizzati (rigidi)
•• macchine di misura a CNmacchine di misura a CN
Strumenti di controllo dimensionaleStrumenti di controllo dimensionale
Ing. L. Romoli
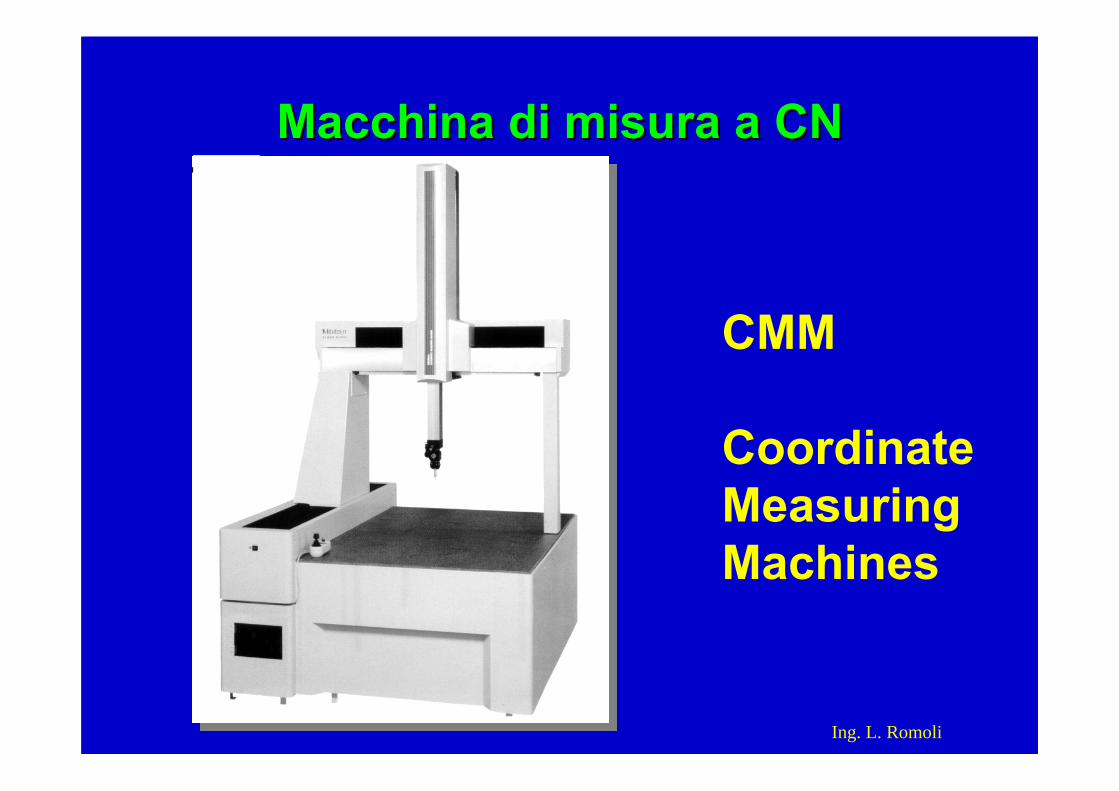
Macchina di misura a CNMacchina di misura a CN
CMM
Coordinate MeasuringMachines

Ing. L. Romoli
• Sostituire strumenti automatici più rigidi (comparatori pneumatici ed elettronici) perchésono più versatili, flessibili ed integrabili a fianco delle linee di lavorazione
• Sono molto usate nel Reverse Engineeringovvero nel rilevamento di superfici non note per la trasformazione in un modello CAD
Macchina di misura a CN Macchina di misura a CN campi di impiegocampi di impiego

Ing. L. Romoli
Concetto generaleConcetto generaledi macchina di misura a CNdi macchina di misura a CN
ControllocaratteristichedimensionaliTastatoreTastatore
Pezzo da Pezzo da controllarecontrollare
ContattoContatto
Memorizza-zione quotedi contatto

Ing. L. Romoli
Concetto generaleConcetto generaledi macchina di misura a CNdi macchina di misura a CN

Ing. L. Romoli
•• Con asse z verticale a sbalzoCon asse z verticale a sbalzo
•• Con asse z orizzontale a sbalzoCon asse z orizzontale a sbalzo
•• A portaleA portale
SullSull’’asse z si monta il asse z si monta il tastatore (o tastatore (o ““probeprobe””))pipiùù adatto ad effettuare un certo tipo di adatto ad effettuare un certo tipo di misura.misura.
Strutture delle macchine di misura (1)Strutture delle macchine di misura (1)

Ing. L. Romoli
•• Struttura a portaleStruttura a portale
•• Struttura a collo di cigno (Struttura a collo di cigno (cantilevercantilever))
•• Struttura a truschino (robot di misura)Struttura a truschino (robot di misura)
•• Strutture specialiStrutture speciali
Strutture delle macchine di misuraStrutture delle macchine di misura
•• Struttura a portaleStruttura a portale
Ing. L. Romoli
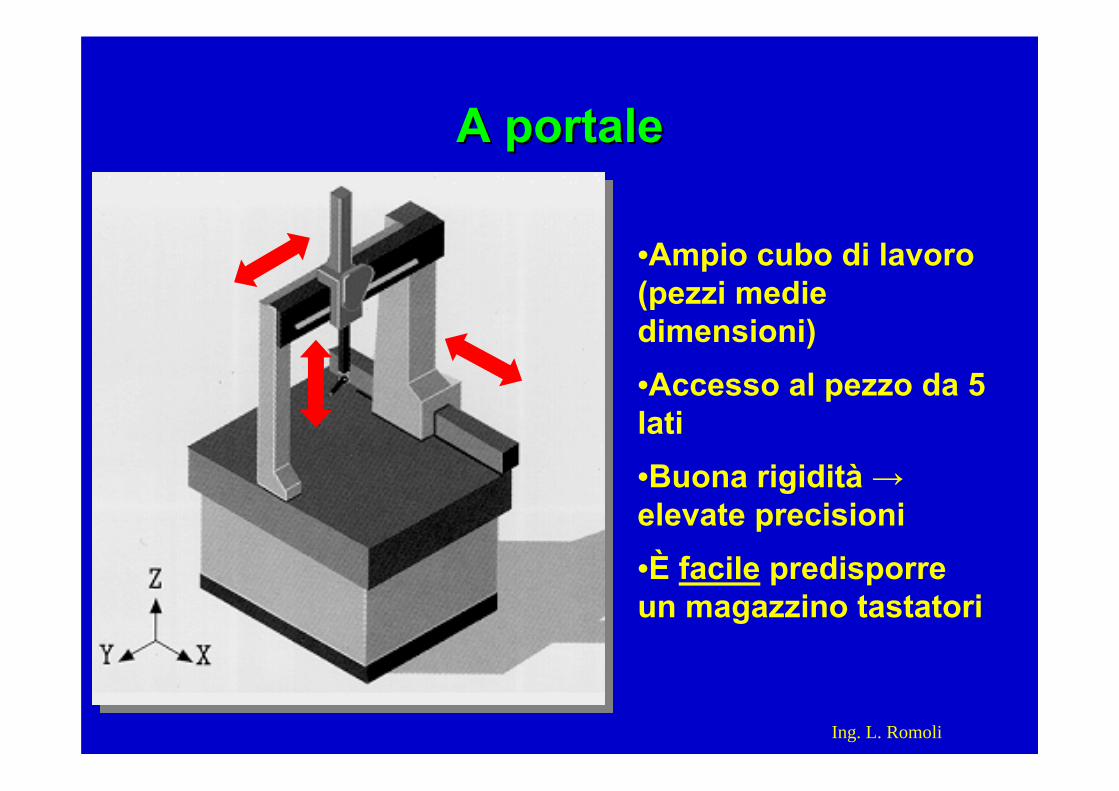
A portaleA portale
•Ampio cubo di lavoro (pezzi medie dimensioni)•Accesso al pezzo da 5 lati•Buona rigidità →elevate precisioni•È facile predisporre un magazzino tastatori

Ing. L. Romoli
•• Struttura a portaleStruttura a portale
•• Struttura a collo di cigno (Struttura a collo di cigno (cantilevercantilever))
•• Struttura a truschino (robot di misura)Struttura a truschino (robot di misura)
•• Strutture specialiStrutture speciali
Strutture delle macchine di misuraStrutture delle macchine di misura

Ing. L. Romoli
A collo di cigno (A collo di cigno (cantilevercantilever))
•Occorre limitare la parte a sbalzo (cantilever) → pezzi piùpiccoli•Accesso al pezzo da 5 lati•Difficile predisporre un magazzino tastatori

Ing. L. Romoli
•• Struttura a portaleStruttura a portale
•• Struttura a collo di cigno (Struttura a collo di cigno (cantilevercantilever))
•• Struttura a truschino (robot di misura)Struttura a truschino (robot di misura)
•• Strutture specialiStrutture speciali
Strutture delle macchine di misuraStrutture delle macchine di misura

Ing. L. Romoli
A truschino (robot di misura)A truschino (robot di misura)
•Limitate masse in movimento → altevelocità di misura•Accesso al pezzo da solo 4 lati (a meno di non utilizzare una tavola portapezzogirevole)•È facile integrarla in un sistema FMS dove il pezzo arriva montato dalla linea su un pallet

Ing. L. Romoli
•• Struttura a portaleStruttura a portale
•• Struttura a collo di cigno (Struttura a collo di cigno (cantilevercantilever))
•• Struttura a truschino (robot di misura)Struttura a truschino (robot di misura)
•• Strutture specialiStrutture speciali
Strutture delle macchine di misuraStrutture delle macchine di misura
Ing. L. Romoli
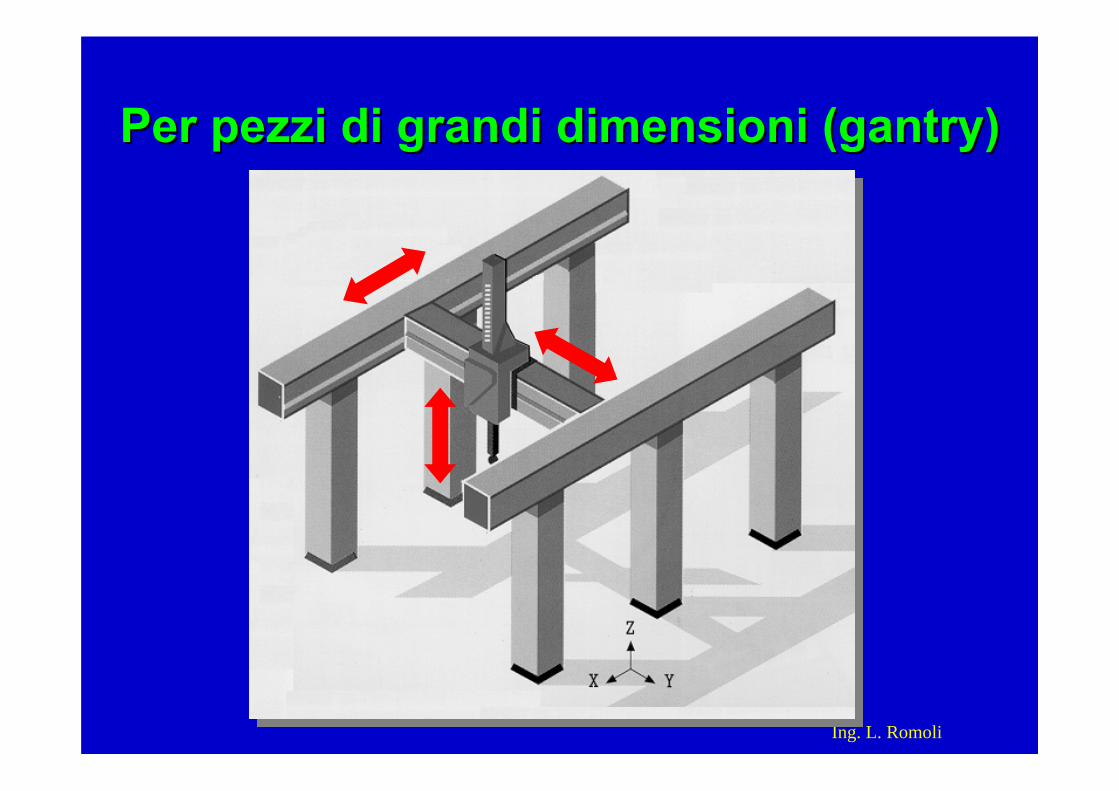
Per pezzi di grandi dimensioni (Per pezzi di grandi dimensioni (gantrygantry))
Ing. L. Romoli
•• Materiali specialiMateriali speciali
•• Guide a sostentamento Guide a sostentamento fluidostaticofluidostatico
•• Trasmissione del moto con nastroTrasmissione del moto con nastro
•• Trasduttori di posizione di alta Trasduttori di posizione di alta precisioneprecisione
Particolari costruttiviParticolari costruttivi
•• Materiali specialiMateriali speciali

Ing. L. Romoli
Parti in granito (1)Parti in granito (1)in una macchina di misura a CNin una macchina di misura a CN
Portale
Braccio
Tavola
Parti in acciaio e ghisa come nelle macchine utensili tradizionali e a CN
Leghe di alluminio
Granito
Ceramica
Ing. L. Romoli
Guide in diabase (o granito nero) perché sono:• Basso coefficiente di dilatazione termica• Non ossidabili• Elevata durezza• Elevata stabilità nel tempo
Parti in granito (2)Parti in granito (2)
Parti in calcestruzzo armatoParti in calcestruzzo armatoBasi di appoggio della macchina sono in calcestruzzo
armato:• Grande massa per smorzare le vibrazioni esterne

Ing. L. Romoli
•• Materiali specialiMateriali speciali
•• Guide a sostentamento Guide a sostentamento fluidostaticofluidostatico
•• Trasmissione del moto con nastroTrasmissione del moto con nastro
•• Trasduttori di posizione di alta Trasduttori di posizione di alta precisioneprecisione
Particolari costruttiviParticolari costruttivi

Ing. L. Romoli
Guida a sostentamento Guida a sostentamento fluidostaticofluidostatico o o pneumostaticopneumostatico (1)(1)
BasamentoBasamento
Struttura mobileStruttura mobileIngresso fluido in Ingresso fluido in pressionepressione
Movimenti •dolci•veloci
ottenuti con •basse forze e•assenza di
•usura•vibrazioni

Ing. L. Romoli
Nelle CMM di piccole e medie dimensioni il sostentamento penumostatico risolve i problemi di:
ATTRITO: l’attrito arriva a valori di 10-6 rispetto al 10-3
delle viti a ricircolazione di sfere.STICK-SLIP: non si hanno transizioni fra condizioni di attrito statico (STICK) e condizioni di attrito dinamico (SLIP).LOST MOTION: si riesce ad ottenere la totale assenza di giochi ed eliminare gli errori di determinazione della posizione conseguenti.
Guida a sostentamento Guida a sostentamento fluidostaticofluidostatico o o pneumostaticopneumostatico (2)(2)

Ing. L. Romoli
•• Materiali specialiMateriali speciali
•• Guide a sostentamento Guide a sostentamento fluidostaticofluidostatico
•• Trasmissione del moto con nastroTrasmissione del moto con nastro
•• Trasduttori di posizione di alta Trasduttori di posizione di alta precisioneprecisione
Particolari costruttiviParticolari costruttivi

Ing. L. Romoli
Trasmissione a nastro
• Trasmissione mediante nastri metallici o cinghie con pulegge servono a smorzare le vibrazioni e a ottenere alte velocità ed accelerazioni. Servono anche ad evitare stick slip e impiego di sistemi di recupero dei giochi.

Ing. L. Romoli
•• Materiali specialiMateriali speciali
•• Guide a sostentamento Guide a sostentamento fluidostaticofluidostatico
•• Trasmissione del moto con nastroTrasmissione del moto con nastro
•• Trasduttori di posizione di alta Trasduttori di posizione di alta precisione (0.5 precisione (0.5 m)m)
Particolari costruttiviParticolari costruttivi

Ing. L. Romoli
•• Tastatore on/offTastatore on/off
•• Tastatore continuoTastatore continuo
•• Tastatore otticoTastatore ottico
TastatoriTastatori

Ing. L. Romoli
Uso dei tastatoriUso dei tastatori

Ing. L. Romoli
•• Tastatore on/offTastatore on/off
•• Tastatore continuoTastatore continuo
•• Tastatore otticoTastatore ottico
TastatoriTastatori
•• Tastatore on/offTastatore on/off
Ing. L. Romoli
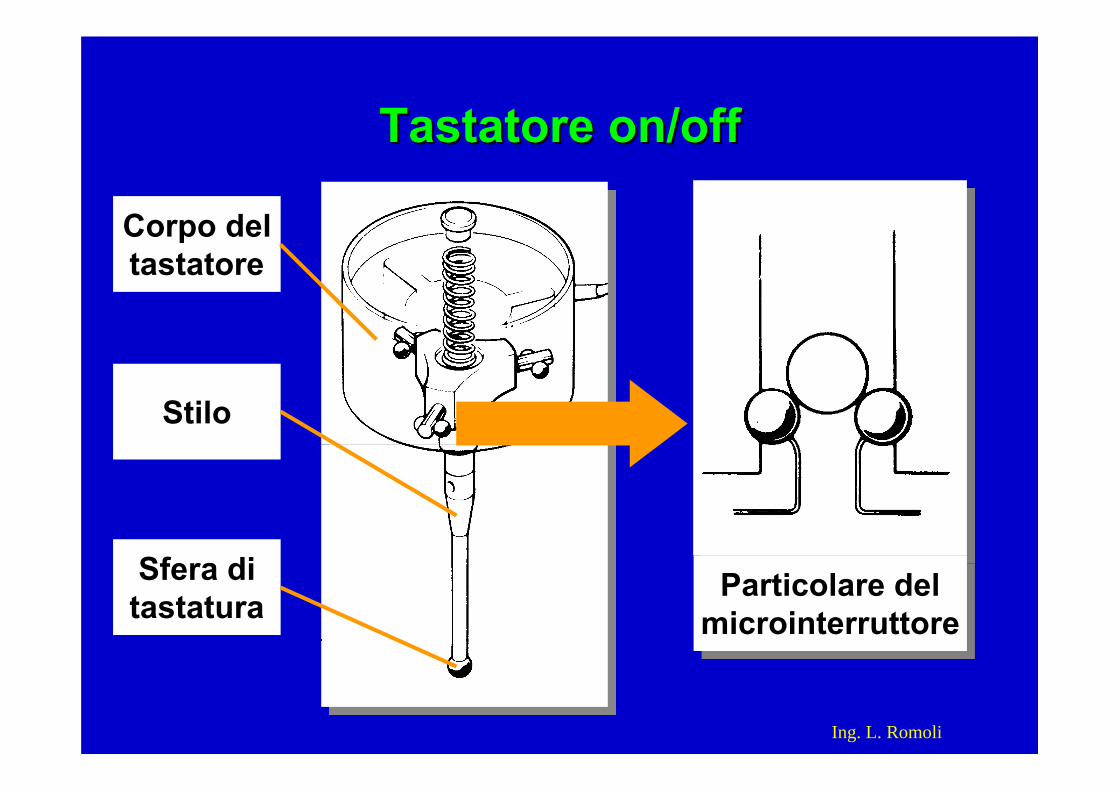
Tastatore on/offTastatore on/off
Corpo deltastatore
Stilo
Sfera ditastatura Particolare del
microinterruttoreParticolare del
microinterruttore

Ing. L. Romoli
Tastatore on-offv v
acquisizionemisura
contatto
t
apertura interruttore
decellerazionefino a v=0
v
a
allontanamento
v
Soluzione: PZT!

Ing. L. Romoli
•• Tastatore on/offTastatore on/off
•• Tastatore continuoTastatore continuo
•• Tastatore otticoTastatore ottico
TastatoriTastatori

Ing. L. Romoli
Tastatore continuoTastatore continuo
Ing. L. Romoli
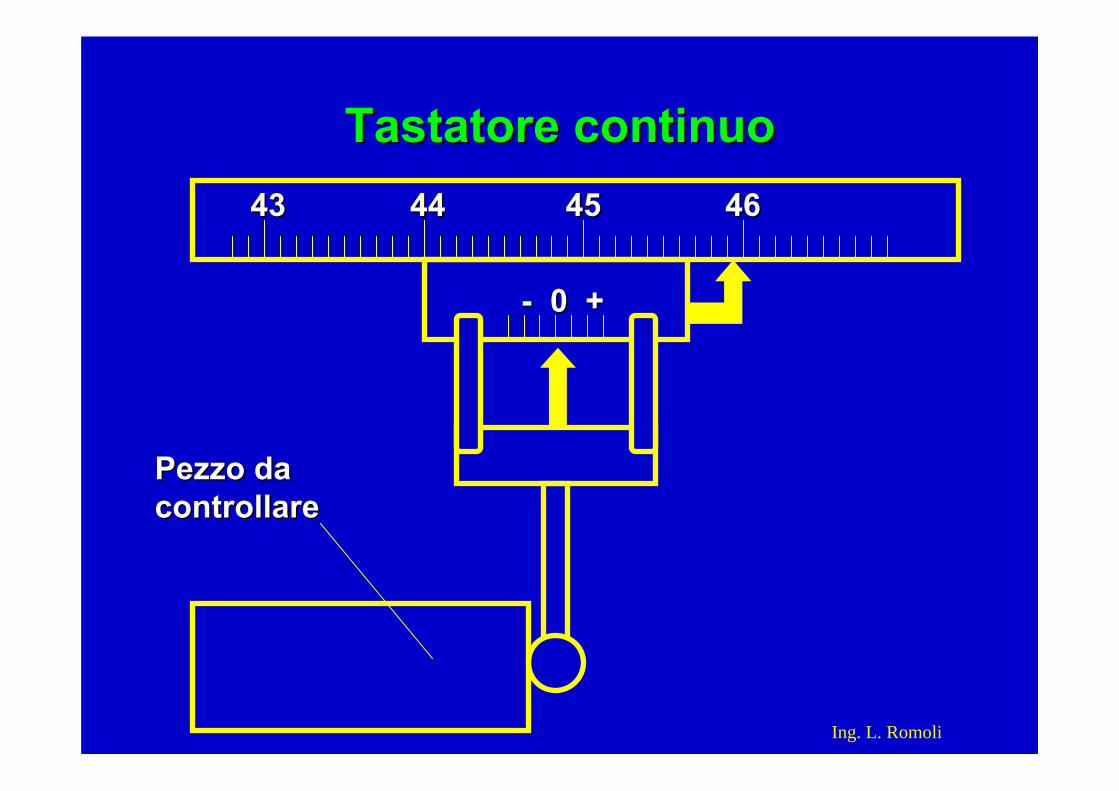
Tastatore continuoTastatore continuo
-- 0 +0 +
4343 4444 4545 4646
Pezzo da Pezzo da controllarecontrollare

Ing. L. Romoli
Tastatore continuoTastatore continuo
-- 0 +0 +
4343 4444 4545 4646
Pezzo da Pezzo da controllarecontrollare

Ing. L. Romoli
Tastatore continuoTastatore continuo
-- 0 +0 +
4343 4444 4545 4646
Pezzo da Pezzo da controllarecontrollare

Ing. L. Romoli
Varie tipologie di stili di Varie tipologie di stili di tastaturatastaturaDiametro foro su lamiera sottile
Diametro grande su piastra spessa
Diametro piccolo su piastra spessa
Diametro filettato su barra
a b
c dDiametro filettato su barra
Profondità centrino su piastra

Ing. L. Romoli
Varie tipologie di stili di Varie tipologie di stili di tastaturatastatura

Ing. L. Romoli
Stilo a stella e suo impiegoStilo a stella e suo impiego

Ing. L. Romoli
•• Tastatore on/offTastatore on/off
•• Tastatore continuoTastatore continuo
•• Tastatore otticoTastatore ottico
TastatoriTastatori

Ing. L. Romoli
Tastatore laserTastatore laser
Pezzo da Pezzo da controllarecontrollare
Sorgente Sorgente laserlaser
Sensore Sensore otticoottico
AmplificatoreAmplificatore
UnitUnitàà di di governogoverno

Ing. L. Romoli
Tastatore laserTastatore laser

Ing. L. Romoli
Corpo di tastatore motorizzatoCorpo di tastatore motorizzato
Tastatore motorizzato

Ing. L. Romoli
Sistemi multi-sensore

Ing. L. Romoli
Volume di lavoro : 400 x 200 x 200 mmRisoluzione fino a 0.1µmE1=(1,4+L/300) µmE2=(1,8+L/250) µmE3=(2,5+L/150) µm (L in mm)
CMM MultisensoreWERTH V-Check-IP 400
Sensori:- Video- Laser a olografia conoscopica- Tastatore meccanico
Sistemi multi-sensore

Ing. L. Romoli
60 µm
200 µm
Esempio di misura:foro di piccolo diametro
Sensore opto-tattilemontato su una CMM ottica
Sensore opto-tattile
Fonte: Werth Messtechnik

Ing. L. Romoli
Magazzino tastatoriMagazzino tastatori

Ing. L. Romoli
Qualifica del tastatoreQualifica del tastatore
00
Asse XAsse X
Raggio sferaRaggio sfera
X trasduttoreX trasduttore
X effettivoX effettivo

Ing. L. Romoli
Sfera di qualificaSfera di qualifica

Ing. L. Romoli
Qualifica dinamica del tastatoreQualifica dinamica del tastatore
00
Asse XAsse X
Raggio sferaRaggio sfera
X trasduttoreX trasduttore
X effettivoX effettivo
VVmisuramisura
Qualifica tastatore

Ing. L. Romoli
•• Per autoapprendimentoPer autoapprendimento
•• Tramite linguaggio di programmazioneTramite linguaggio di programmazione
•• Tramite sistemi di simulazioneTramite sistemi di simulazione
ProgrammazioneProgrammazionedelle macchine di misuradelle macchine di misura
•• Per autoapprendimentoPer autoapprendimento

Ing. L. Romoli
Programmazione per autoapprendimentoProgrammazione per autoapprendimento
Consolle
Joy-stick
autoapprendimento

Ing. L. Romoli
•• Per autoapprendimentoPer autoapprendimento
•• Tramite linguaggio di programmazioneTramite linguaggio di programmazione
•• Tramite sistemi di simulazioneTramite sistemi di simulazione
ProgrammazioneProgrammazionedelle macchine di misuradelle macchine di misura

Ing. L. Romoli
Esempio di part program
MOVE (MOVE (--101,101,--110,12)110,12) Movimento in rapidoMovimento in rapido
MOVE (MOVE (--95,95,--111,111,--209)209) Movimento in rapidoMovimento in rapido
MIS (MIS (--80,80,--11,11,--209)209) TastaturaTastatura
CIL1 = CIL(8)CIL1 = CIL(8) Creazione del cilindro CIL1Creazione del cilindro CIL1
ottenuto con la ottenuto con la tastaturatastatura di 8 puntidi 8 punti
MOVE (MOVE (--150,150,--110,10)110,10) Movimento in rapidoMovimento in rapido
PRINT (CIL1 [PRINT (CIL1 [])]) Stampa del diametro del cilindroStampa del diametro del cilindro
CIL1 sul certificato di collaudoCIL1 sul certificato di collaudo

Ing. L. Romoli
•• Per autoapprendimentoPer autoapprendimento
•• Tramite linguaggio di programmazioneTramite linguaggio di programmazione
•• Tramite sistemi di simulazioneTramite sistemi di simulazione
ProgrammazioneProgrammazionedelle macchine di misuradelle macchine di misura

Ing. L. Romoli
ProgrammazioneProgrammazionecon sistemi di simulazionecon sistemi di simulazione
Ing. L. Romoli
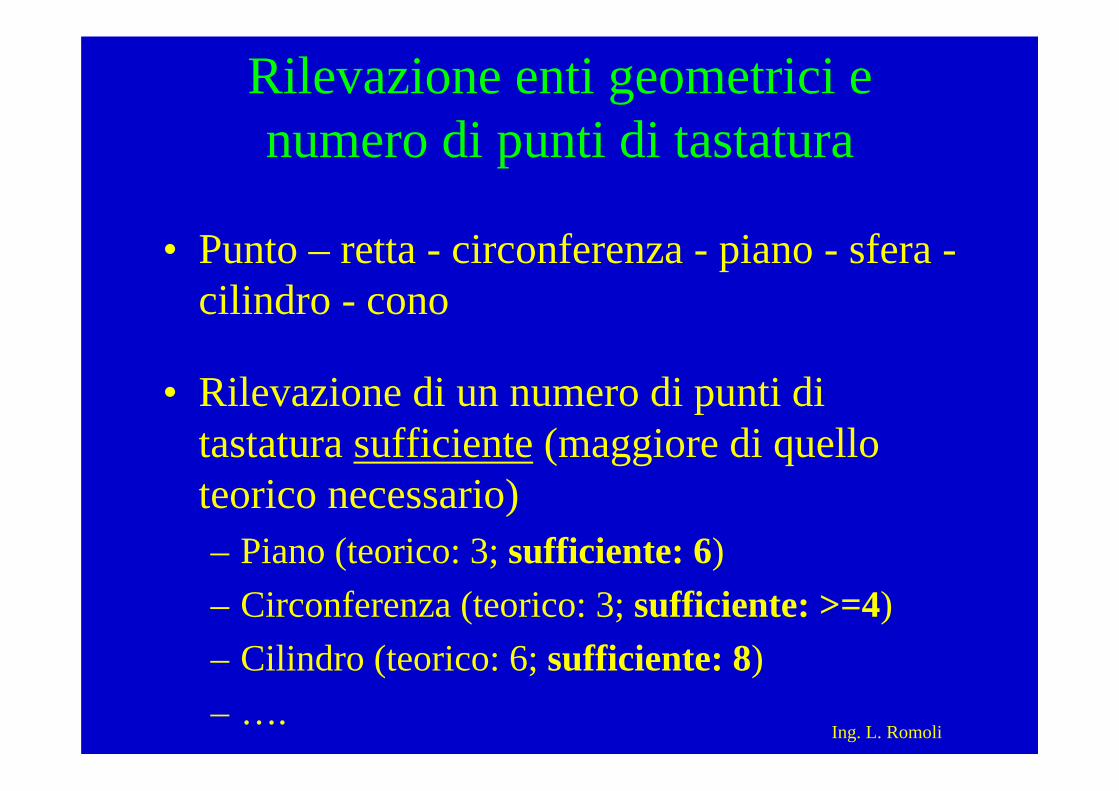
Rilevazione enti geometrici e numero di punti di tastatura
• Punto – retta - circonferenza - piano - sfera -cilindro - cono
• Rilevazione di un numero di punti di tastatura sufficiente (maggiore di quello teorico necessario)– Piano (teorico: 3; sufficiente: 6)– Circonferenza (teorico: 3; sufficiente: >=4)– Cilindro (teorico: 6; sufficiente: 8)– ….

Ing. L. Romoli
Esempio di Esempio di tastaturatastatura
5050
50507070
0 .
010 .
01
3030
H7H7
5555

Ing. L. Romoli
Disposizione del pezzo sulla macchinaDisposizione del pezzo sulla macchina

Ing. L. Romoli
Scelta dei punti di Scelta dei punti di tastaturatastatura

Ing. L. Romoli
Scelta del tipo di stiloScelta del tipo di stilo

Ing. L. Romoli
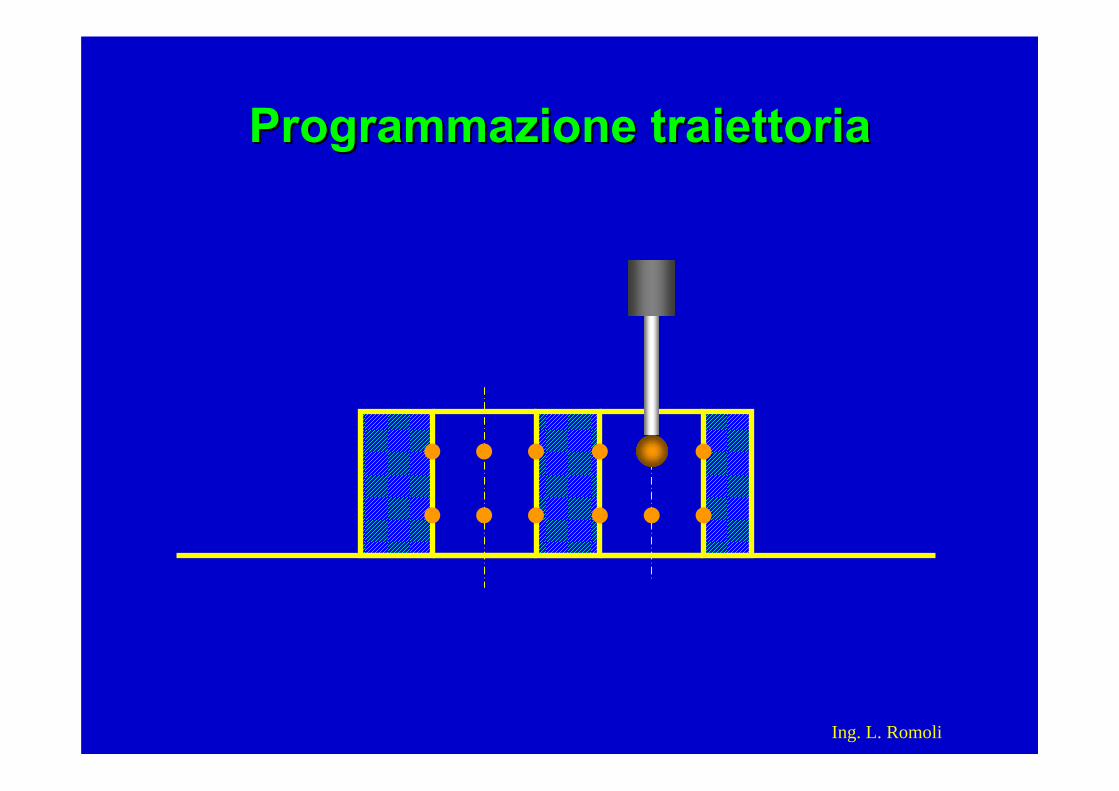
Programmazione traiettoriaProgrammazione traiettoria

Ing. L. Romoli
Programmazione traiettoriaProgrammazione traiettoria

Ing. L. Romoli
Programmazione traiettoriaProgrammazione traiettoria

Ing. L. Romoli
Programmazione traiettoriaProgrammazione traiettoria
Ing. L. Romoli
Programmazione traiettoriaProgrammazione traiettoria

Ing. L. Romoli
Programmazione traiettoriaProgrammazione traiettoria

Ing. L. Romoli
Programmazione traiettoriaProgrammazione traiettoria

Ing. L. Romoli
Programmazione traiettoriaProgrammazione traiettoria

Ing. L. Romoli
Programmazione traiettoriaProgrammazione traiettoria
X 6 punti sul piano

Ing. L. Romoli
Certificato di collaudo
Particolare esaminato: Particolare esaminato: Piastra forataPiastra forata
Numero disegno: Numero disegno: 193/A193/A
Data: Data: 10 / 2 / 0210 / 2 / 02
ElementoElemento Valore realeValore reale Valore nom.Valore nom. ErroreErrore TollToll..
CIL1CIL1 30.01630.016 3030 +0.016+0.016 SSìì
CIL2CIL2 30.00530.005 3030 +0.005+0.005 SSìì
DIST1DIST1 69.98869.988 7070 -- 0.0120.012 NoNo

Ing. L. Romoli
Esempio di Esempio di tastaturatastatura
5050
5050
3030
H7H7
2020
4040
H7H7
5555

Ing. L. Romoli
L
L
D
d
r

Ing. L. Romoli
Esempio di Esempio di tastaturatastatura
100100
100
100
3535
4040
5050
H7H7
2002004040

Ing. L. Romoli

Ing. L. Romoli
Esempio di Esempio di tastaturatastatura
100100
100
100
3535
4040
5050
2002004040
6060
H7H7
2020

Ing. L. Romoli

Ing. L. Romoli
MitutoyoMitutoyo Euro C 9106Euro C 9106

Ing. L. Romoli
MitutoyoMitutoyo Euro C 9106Euro C 9106
• Corsa degli assi: asse X 900 mmasse Y 1000 mmasse Z 600 mm
• Risoluzione: 0,0005 mm• Trasduttori di posizione: encoder lineari• Velocità in modalità CNC: spostamento da 8 a 250 mm/sec
misura da 1 a 3 mm/sec• Velocità in modalità joystick: spostam. da 0 a 90 mm/sec
misura da 0 a 3 mm/sec• Precisione: 3 + 4 L /1000 m• Tavola: in granito 1040 x 1720 mm• Pezzo: altezza massima 740 mm, peso massimo 800 kg