3d motion tracking by inertial and magnetic sensors with ... · ba 0250 0150, 9996 0,0049 0,9999...
TRANSCRIPT
Junping CaiM.Sc. E. E, PhD
Centre for Product Development (CPD) Mads Clausen Institute (MCI)
University of Southern Denmark(SDU) 2011
3D Motion Trackingby Inertial and Magnetic sensors
with or without GPS

Outline Short introduction of Junping Cai Coordinate Systems Inertial Motion Tracking Working Principle On-site Calibration Extended Kalman Filter without GPS Extended Kalman Filter with GPS Experiment results Application examples Discussions

Short introduction of Junping
Come from China
1988-1992, B.Sc., Automatic Control, Department of Automatic Control, Nanjing University of Aeronautics and Astronautics, China
1992-1996, Production Engineer, Canon (Tianjin) Ltd., China 1996-2002, Purchasing Engineer, Danfoss (Tianjin) Ltd., China 2002-2004, M.Sc., Mechatronics Engineering, Mads Clausen Institute
(MCI),University of Southern Denmark (SDU), Denmark 2004-2007, PhD Student, Automation & Control, Department of Electronic
Systems,Aalborg University, Denmark, Supervisors: Professor Jakob Stoustrup 2008 – 2009, Lead Development Engineer, Automatic Controls Laboratories,
Danfoss A/S, Denmark 2009—now, R & D Engineer, Centre for Product Development
(CPD),MCI,SDU

Coordinate systems
Relations between ECEF-frame (e), local geodetic-frame (t) and inertial-frame (i) .
Earth-Centered Earth-Fixed Frame (ECEF, e-frame)
Inertial Frame (i-frame)
Local Geodetic Frame (t-frame) Local Tangent Plane (LTP)(N-frame, global) North- East- Down (NED) East- North- Up (ENU)
Body Frame (b-frame,local)ForwardRightDown
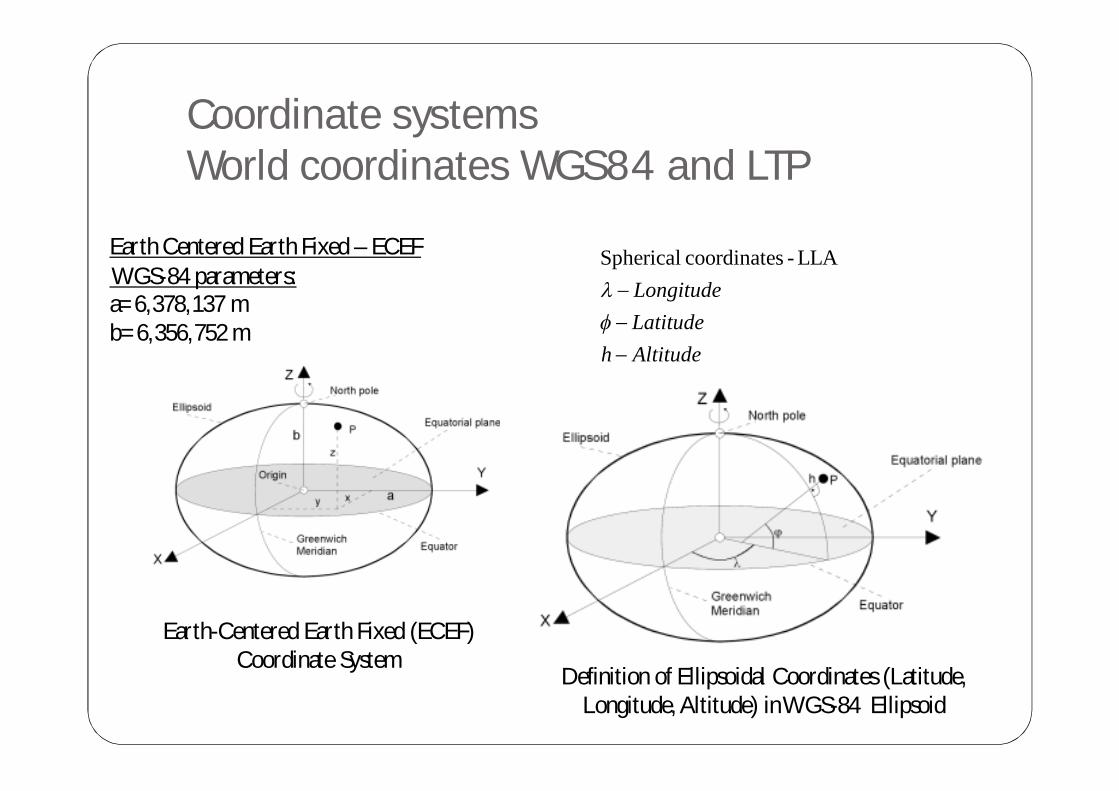
Coordinate systemsWorld coordinates WGS84 and LTP
Earth-Centered Earth Fixed (ECEF) Coordinate System
Earth Centered Earth Fixed – ECEFWGS‐84 parameters: a=6,378,137 mb=6,356,752 m
Definition of Ellipsoidal Coordinates (Latitude, Longitude, Altitude) in WGS-84 Ellipsoid
AltitudehLatitudeLongitude
LLA -scoordinate Spherical

Inertial motion tracking working principle
Integral
Projection to global IntegralIntegralCorrect
gravity
3-axis GyroAngular Rate
3 -axis AccelerometerAcceleration
Orientation
Velocity Position
Initial Velocity
Initial Position
zyx aaaterAccelerome
zyx ωωωGyroscope North
East
Up
Global system
nOrientatio
Position
Velocity
ZYX
ZYX
PPP
VVVEuler AnglesQuaternion
Rotation vector
Coordinate Transformation
local system
‘The Devil is in the details’
Linear Acceleration

Quaternion attitude representation-for example
00
00
)(
)())(()(),()(
)(21
021)(
update Quaternion
22)12()(Local) to(Globalmatrix tion Transforma
Quaternion
24411
)()()(
43324
4321
zyx
zxy
yxz
xyz
kL
Gt
kL
GkkkL
G
tLG
tLG
tLG
TLG
tqtqtttq
qqtq
qqqqIqqC
qkqjqiqq
C(1,1))C(1,2),(atan Yaw
C(1,3))asin(- Pitch
C(3,3))C(2,3),(atan Rollgravity-g
position
velocity
aon acceleratilinear
)(
LG
LG2
LG
LG
LG2
00
00
linear
1
tf
t
tf
t linear
ENU
z
y
xL
G
U
N
E
VdtPP
dtaVV
ga
aaa
qCaaa
Transformation

Calibration Why:
Low cost Suffer from the time drift Sensitivity to the environmental parameters
Purpose is to in-field determine : The Bias The Scale factor (Gain) The Orientation (misalignment)
Requirement Time Complexity Instruments ...
3-axis Acc
3-axis Gyro
Support base
Sensors case
3-axis Mag

Orientation -Misalignment Misalignment: Nominal sensitivity axis vs. Actual sensitivity axis
r
r
r
r
rr
sinsincossin
cos
1rUnit vecto
,r ,raxisy sensitivit Actual
222
rrrrrr
rrr
r

Accelerometer calibration example
5342,15288,14985,1
Ba
9996,0015,00250,00098,09999,00049,00251,00050,09997,0
Ra
0 2 4 6 8 10 12 14
x 104
-2
-1.5
-1
-0.5
0
0.5
1
1.5
2
axa
yaza
tot
330] 300 [270max] [min typ
ionspecificatsheet Data1,29300
08,2980006,291
Ka
0 2 4 6 8 10 12 14
x 104
0
200
400
600
800
1000
1200
a
xayazax,fay,fa
z,f
Raw and filtered data
Calibrated data

On-field fast calibration-Magnetometers
Method I: Using Earth Magnetic Field as Known Input, Publication ION 2010
Method II: 3D Ellipsoid Curve Fitting Method III: 2D Mapping (boat & car)
Alsion 2 for example (WMM 2010)Latitude = 54.91; % Degree NLongitude = 9.78; % Degree EAltitude = 0.00; % KmDate = 2011.2;F = 49826.4e-5; % nT 2 GaussH = 17513.6e-5; % nT 2 GaussX = 17506.3e-5; % nT 2 GaussY = 505.1e-5; % nT 2 GaussZ = 46647.0e-5; % nT 2 GaussDecl = 1 + 39/60; % (Degree East)Incl = 69+ 25/60; % (Down) (Dip)
Alsion 2 for example (WMM 2010)Latitude = 54.91; % Degree NLongitude = 9.78; % Degree EAltitude = 0.00; % KmDate = 2011.2;F = 49826.4e-5; % nT 2 GaussH = 17513.6e-5; % nT 2 GaussX = 17506.3e-5; % nT 2 GaussY = 505.1e-5; % nT 2 GaussZ = 46647.0e-5; % nT 2 GaussDecl = 1 + 39/60; % (Degree East)Incl = 69+ 25/60; % (Down) (Dip)
Magnetic declination is the angle between magnetic north (the direction the north end of a compass needle points) and true north(north pole). The declination is positive when the magnetic north is east of true north.

On-field fast calibration-Magnetometers
Requirement: Many different orientations
as possible. e.g. keep the object still for a few seconds in at least 12 significantly different orientations, preferably more
At least 3 meters from large ferromagnetic objects such as radiators and iron desks
mapping 3D :III Method
555560
565525
530
440
445
450
455
Magnetic field raw data
-0.4 -0.2 0 0.2 0.4 -0.4-0.2
00.2
0.4-0.4
-0.2
0
0.2
0.4
Magnetic field calibrated data
222
z
zz
y
yy
x
xx
kbh
kbh
kbhF

On-field fast calibration-Magnetometers 2D mapping example
0 10 20 30 40 50 60-0.5
0
0.5
1Magnetic Field Raw Data
Mag
netic
[Gau
ss]
0 10 20 30 40 50 60-0.5
0
0.5
1
Time [s]
Mag
netic
[Gau
ss]
Magnetic Field Calibrated Data
BR
BP
BYBtot
Btot,t
-0.6 -0.4 -0.2 0 0.2 0.4 0.6
-0.2
-0.1
0
0.1
0.2Horizontal Projection
[Gau
ss]
[Gauss]
beforeaftertrue
0 10 20 30 40 50 600.4
0.5
0.6
0.7
0.8Vertical Projection
[Gau
ss]
time [s]

On-field calibration No special instrument is needed No special training is needed No strict sensor alignment (when mounting) is need First we do the factory calibration Then user do the on-site (on-use) calibration
1. User need to stand still (if mounted) or hold the sensor set still for a few seconds
2. User turns around 360 degree (if mounted) or rotate the sensor set in space
Automatic and fast!

Extended Kalman Filter without GPSEvent detection and Constraints
Error Estimates
IMU Navigation Processor
Kalman FilterKalman Filter
Position Velocity Attitude
Error estimates
Closed loop
MagnetometerN-Navigation coordinate (NED)b- sensor body coordinate
Constraints
Event detector
Event detector

Extended Kalman Filter with GPS Loosely coupled integration strategy
Error Estimates
IMU Navigation Processor
Kalman FilterKalman Filter
Position Velocity Attitude
Error estimates
Closed loop
GPS
MagnetometerN-Navigation coordinate (NED)b- sensor body coordinate
Constraints

Experiments (indoor)
Walking a straight line
-1 -0.5 0 0.5 10
0.2
0.4
0.6
0.8
1
1.2
1.4
1.6
1.8
2
Position
Right[m]
Forw
ard
[m]
0 5 10 15 20 25 30-20
0
20Acceleration measurement in RPY
time [sec]Acc
eler
atio
n [m
/s2 ]
AR
APAY
Atot
0 5 10 15 20 25 30-10
0
10Linear Acceleration in NED
time [sec]Acc
eler
atio
n [m
/s2 ]
AN
AE
AD
0 5 10 15 20 25 30-5
0
5Velocity
time [sec]
Vel
ocity
[m/s
]
VN
VE
VD

Indoor pedestrian tracking

Experiment (outdoor)Landyacht with GPS
Alsion parking lot

Experiment Results
0 50 100 150 200-5
0
5Roll angle [degree]
0 50 100 150 200-20
-15
-10Pitch angle [degree]
0 50 100 150 200
-1000
100
Yaw angle [degree]

Experiment Results
0 50 100 150 200-3
-2
-1
0
1
2
3
time [s]
Vel
ocity
[m/s
]
Velocity in NED
VN
VEVD
0 50 100 150 200-1
-0.5
0
0.5
1
1.5
2
time [s]
Acc
eler
atio
n [m
/s2 ]
Linear Acceleration

Experiment Results
0 20 40 60 80 100 120 140 160 180 200-150
-100
-50
0
50
100Position in NED
time [sec]
Pos
ition
[m]
PN
PEPD
INS: Fs=100 Hz GPS: Fs=1 HzBlack line -INS. Colored line-GPS 24 25 26 27 28 29
-16
-15
-14
-13
-12
-11
-10
-9
time [sec]
Pos
ition
[m]
Position in NED
Zoomed in

Experiment results
-20 0 20 40 60 80 100 120-140
-120
-100
-80
-60
-40
-20
0
20
Nor
th [m
]
East [m]
Position and Velocity direction
PEN
VcalVGPS

What during GPS signal blockage (outage) periods
The consequence of GPS outage Bridging algorithm Optimal Backward Smoothing (OBS) DBM algorithm1
Positioning errors in INS/GPS navigation applications
Positioning (North) errors between INS/GPS with GPS outage at 40s-50s and 130s-150s
0 50 100 150 200-10
0
10
20
30
40
50
60
70
80
time [sec]
Pos
ition
[m]
Position NED error between INS and GPS

Optimal backward smoothing (OBS)algorithm
Three classes of OBS algorithms fixed-interval smoother
[0 N]
fixed-point (single-point ) smoother
fixed-lag smoother
Application dependent: Post-mission: the fixed-interval Near real-time: the fixed-lag Initial condition: the fixed- point
Categories of OBS algorithms adapted from Nassar 2003
Nmkk
] 1[ Nkjkj

beginingb ende
)(21
outage theduringerror position expected The)(
)(2outage GPS duringparameter error on Accelerati
,,,,,
,,,,,
2
2,,
bGPSibINSibi
eGPSieINSiei
beii
be
bieii
rrrrrr
ttaDBM
ttrr
a
0 50 100 150 200-140
-120
-100
-80
-60
-40
-20
0
20
40
time [sec]
Pos
ition
[m]
Position in NED
DBM algorithm
Scenario shows the effect of backward smoothing (Simulated data with manipulated GPS signal)
red solid line-when GPS outage. red dotted line- GPS true position, black line -smoothed data

Uniqueness of the product
• Compact design: 27.9 x 19.5 x 4.8 mm3, 2 gram + battery • Battery (rechargeable) driven, battery time: 4 - 200 hour• SIM card data storage + USB data transfer/battery charging• 25 sensors hardware and software• 3D gyro, 3D accelerometer, 3D magnetometer, temperature and internal
voltages.• Heading, roll and pitch, velocity, position, angular velocity, acceleration.• Time stamping• RF data transmission /receiving • Advanced batch and data processing and filtering
Applications
Medical /Biomechanical study
Rehabilitation
Sport training
….

Application example: medicalRemote Monitoring of Patients With Parkinson’s Disease (PD)
3D Acceleration
3D Angular velocity
3D (Magnetic)
Normal
Hyper-kinesias
Dystonia
Slow
Freezing
Kalman Filter+Translation+ Pattern recognition
X
Y
Movement pattern of PD patients• normal movements • slowing of movements • hyperkinesias (exaggerated abnormal movements) • dystonia (abnormal tone in a limb) • freezing (no movements)
Time (sec)
Freq
uenc
y (H
z)
Spectrogram of test signal
0 50 100 1500246
0 50 100 1500
2
Time (sec)
Am
plitu
de (g
)
Original test signal
0 50 100 150
204060
Time (sec)
Pow
er ra
tio (%
)
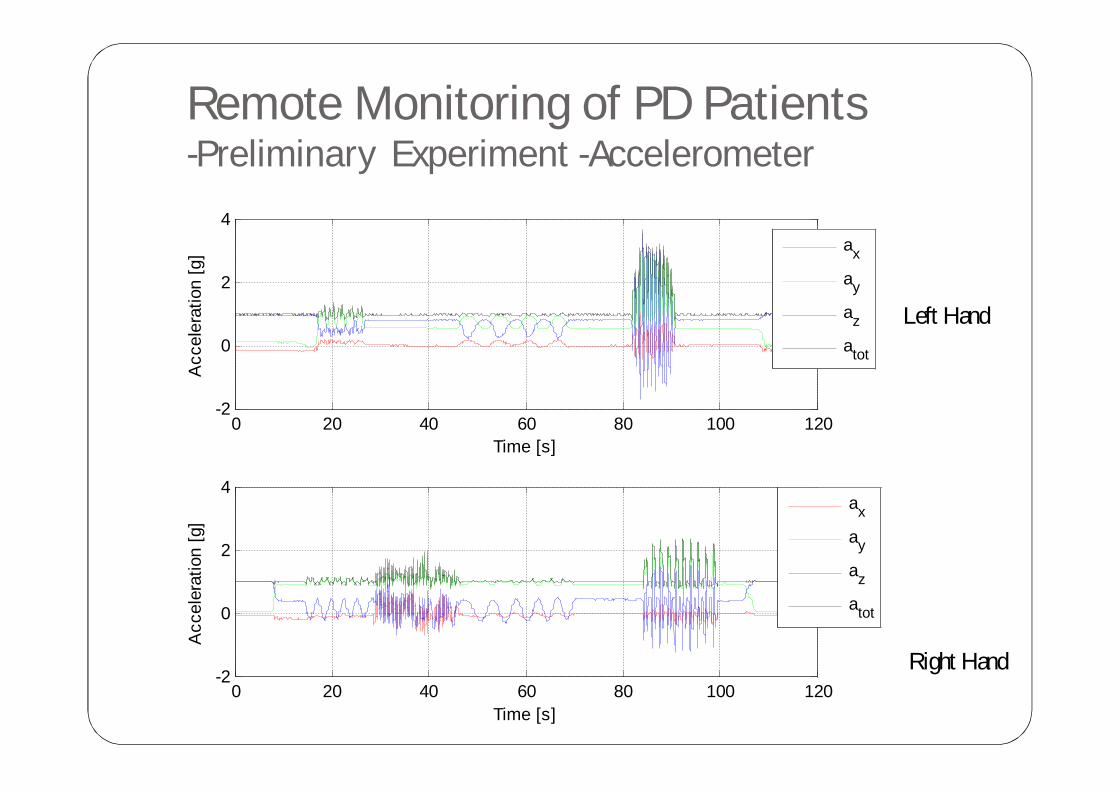
Remote Monitoring of PD Patients-Preliminary Experiment -Accelerometer
0 20 40 60 80 100 120-2
0
2
4
Time [s]
Acc
eler
atio
n [g
]
ax
ay
az
atot
0 20 40 60 80 100 120-2
0
2
4
Time [s]
Acc
eler
atio
n [g
]
ax
ay
az
atot
Left Hand
Right Hand
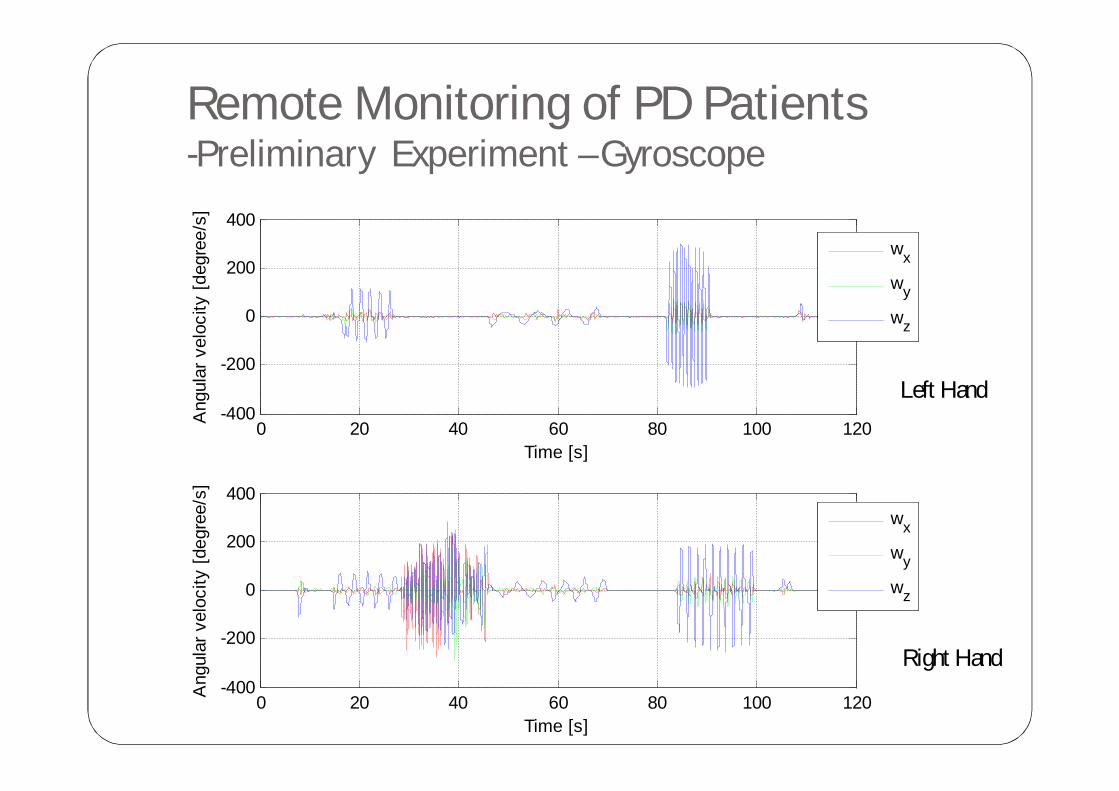
Remote Monitoring of PD Patients-Preliminary Experiment –Gyroscope
0 20 40 60 80 100 120-400
-200
0
200
400
Time [s]
Ang
ular
vel
ocity
[deg
ree/
s]
wx
wy
wz
0 20 40 60 80 100 120-400
-200
0
200
400
Time [s]
Ang
ular
vel
ocity
[deg
ree/
s]
wx
wy
wz
Right Hand
Left Hand

Application example: Medical/ biomechanical study
Life/KU (Copenhagen University)Detection and quantification of lameness in horses Symmetric /Asymmetric
Structure and Motion Laboratory,The Royal Veterinary College, UK Royal National Orthopaedic Hospital, UKStudy of locomotion
Displacement data for x (craniocaudal), y (lateral) and z (dorsoventral) movement m, and orientation data , for optical motion capture (blue) and inertialsensor (red) for a series of strides at canter (9m/s)Structure and Motion laboratory, UK

Application example: Sport training
Application example: Rehabilitation/welfare

Application example: Rehabilitation/welfare

Applications: Sports/rehabilitation
Physical segment model and the definition of its orthogonal frame
Depiction of the 15 segments comprising stick figure for human body

Applications: sports/rehabilitation
Relation between the measurements in segment (i) and segment (i+1)
Transpose-Tfield magnetic-H
gravity-ganglejoint theis
1iisegment fromector rotation v theis
),(
),(
1
1111
1111
ii
Tiz
iy
ix
ii
Tiz
iy
ix
Tiz
iy
ix
ii
Tiz
iy
ix
Kwhere
HHHKRotHHH
gggKRotggg
The whole body movement can be calculated by a series of Translation & Rotation.
There is no need for strict sensor alignment.
Discussions
Do we need so many sensors?
What are the cost of sensors
What is the accuracy of the measurement?

Discussion 1–Do we need so many sensors?
Sensor dependent
roll pitch yaw
Gyroscope Optical (Sagnac Effect )
Ring Laser Gyroscope (RLG) Fiber Optic Gyroscope (FOG)
Mechanical MEMS (Micro-Electro-Mechanical Systems) Gyroscope
Accelerometer
Gyroscope
Magnetometer

Discussion 1 –cont.Do we need so many sensors
When the time frequency matter – accelerometer only is enough
• Application dependent
Time (sec)
Freq
uenc
y (H
z)
Spectrogram of test signal
0 50 100 1500246
0 50 100 1500
2
Time (sec)
Am
plitu
de (g
)
Original test signal
0 50 100 150
204060
Time (sec)
Pow
er ra
tio (%
)

Discussion 1 –cont.Do we need so many sensors
When the angle and linear acceleration matter: gyroscope+ accelerometer + magnetometer
• Application dependent

Discussion 2 What are the cost of sensors
Accelerometers
Magnetometers

Discussion 3What is the accuracy of the measurement? Periodic (cyclic) movement Walking (on one plane / on multi-plane ) Running Hurdles Pole jumping (vaulting)
No cyclic / Random movement (outdoors with GPS )…
No cyclic / Random movement (indoors, e g upper limb movement)- biomechanical model is need

Summary
We can fuse gyroscopes, accelerometers, magnetometers (and GPS data ) to deliver accurate and reliable motion information, and output:• Quaternion/
Transformation matrix /Rotation vector
• Heading, pitch, and roll• Linear acceleration• Velocity • Position
Hardware Software
Mathematic On-site calibration
Data fusion
Mathematic On-site calibration
Data fusion
Biomechanical models
Application knowledge

Some inspirations:
Click and play the videohttp://www.xsens.com/en/mvn-biomech