10/06/20041 resolution enhancement in mri by: eyal carmi joint work with: siyuan liu, noga alon,...
Post on 22-Dec-2015
218 views
TRANSCRIPT

10/06/2004 1
Resolution Enhancementin MRI
By: Eyal Carmi
Joint work with:
Siyuan Liu, Noga Alon,
Amos Fiat & Daniel Fiat

2
Lecture Outline
Introduction to MRIThe SRR problem (Camera & MRI)Our Resolution Enhancement AlgorithmResultsOpen Problems
3
Introduction to MRI
Magnetic resonance imaging (MRI) is an imaging technique used primarily in medical settings to produce high quality images of the inside of the human body.

4
Introduction to MRI
The nucleus of an atom spins, or precesses, on an axis.
Hydrogen atoms – has a single proton and a large magnetic moment.

5
Magnetic Resonance Imaging
Uniform Static Magnetic Field –
Atoms will line up with the direction of the magnetic field.
0 0
0
0
w B
B MagneticField
GyromagneticRatio
w LarmorFrequency

6
Magnetic Resonance Imaging
Resonance – A state of phase coherence among the spins.
Applying RF pulse at
Larmor frequency When the RF is turned off
the excess energy is released
and picked up.

7
Magnetic Resonance Imaging
Gradient Magnetic Fields –
Time varying magnetic fields
(Used for signal localization)
x
y
z

8
Magnetic Resonance Imaging
Gradient Magnetic Fields: 1-D
X
Y
B0
B1
B2
B3
B4
0 0
0
0
w B
B MagneticField
GyromagneticRatio
w LarmorFrequency

9
Signal Localization slice selection
Gradient Magnetic Fields for slice selection
z
ω
z1 z2 z3
0B
Gz,1
Gz,2
z4
ω1
ω2FT
B1(t)

10
Signal Localizationfrequency encoding
Gradient Magnetic Fields for in-plane encoding
t
x
B0B=B0+Gx(t)x
t
Gx(t)

11
Signal Localizationphase encoding
Gradient Magnetic Fields for in-plane encoding
t
x
B0B=B0+Gx(t)x
t
Gx(t)

12
k-space interpretationy
x
Wx
Wy
1-D path
k-space
Δkx
Sampling Points
DFT
2i kr
Object
S k r e dr

13
Magnetic Resonance Imaging
Collected
Data
(k-space)
2-D DFT

14
The Super Resolution Problem
Definition:
SRR (Super Resolution Reconstruction): The process of combining several low resolution images to create a high-resolution image.

15
SRR – Imagery Model
The imagery process model:
Yk – K-th low resolution input image.
Gk – Geometric trans. operator for the k-th image.
Bk – Blur operator of the k-th image.
Dk – Decimation operator for the k-th image.
Ek – White Additive Noise.
NkEXGBDY kkkkk 1

16
SRR – Main Approaches
Frequency Domain techniques
Tsai & Huang [1984]
Kim [1990]
Frequency Domain

17
SRR – Main Approaches
Iterative Algorithms
Irani & Peleg [1993] : Iterative Back Projection
Current HR Best Guess
Back Projection
Back Projected LR images
Original LR images
Iterative Refinement
18
SRR – Main Approaches
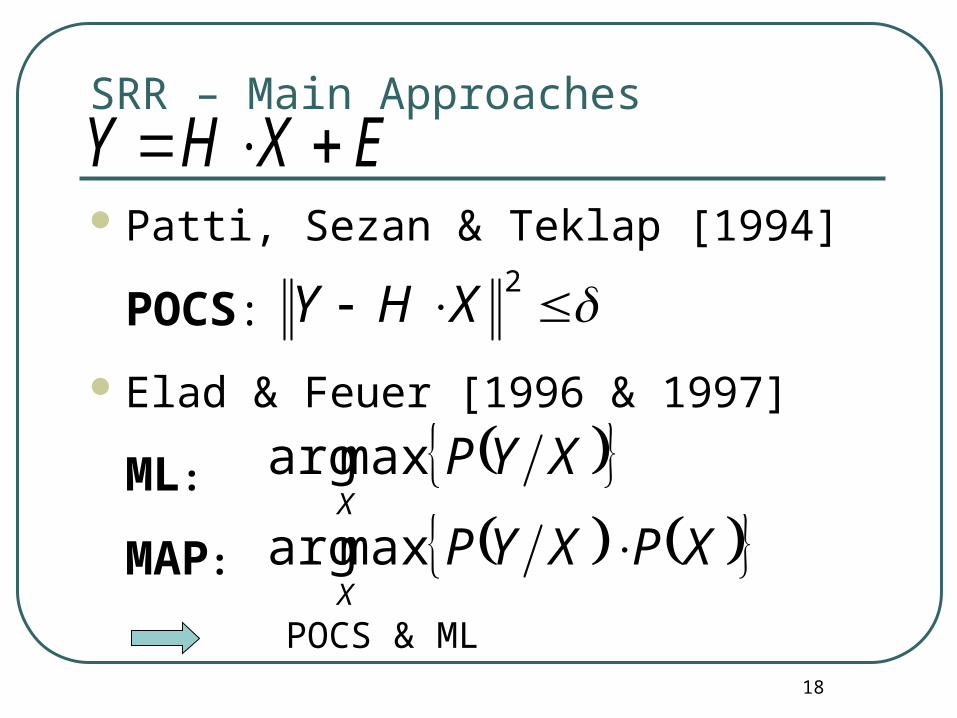
Patti, Sezan & Teklap [1994]
POCS:
Elad & Feuer [1996 & 1997]
ML:
MAP:
POCS & ML
EXHY
2XHY
XYPXmaxarg
XPXYPX
maxarg

19
SRR – In MRI
Peled & Yeshurun [2000]
2-D SRR, IBP, single FOV,
problems with sub-pixel shifts.
Greenspan, Oz, Kiryati and Peled [2002] 3-D SRR (slice-select direction), IBP.

20
Resolution Enhancement Alg.
A Model for the problemReconstruction using boundary values1-D Algorithm2-D Algorithm

21
Modeling The Problem
Subject Area: 1x1 rectilinearly aligned square grid.
(0,0)

22
Modeling The Problem
True Image : A matrix of real values associated with a rectilinearly aligned grid of arbitrary high resolution.
23895
96644
53492
61476
88135(0,0)

23
Modeling The Problem
A Scan of the image:
Pixel resolution –
Offset –
),,(),( yxmFjiS mm
True Image
48
1632
1122
1122
4433
4433),( yx
),( yx
Image Scan, m=2

24
Modeling The Problem
Definitions:
Maximal resolution –
Pixel resolution =
Maximal Offset resolution – We can perform scans at offsets where
with pixel resolution
n1
n mmm ,
n
),( yx
3,2,1 ,, kkyx
Zccm ,1

25
Modeling The Problem
Goal: Compute an image of the subject area with pixel resolution while the maximal measured pixel resolution is
11 δn, nn 1
Errors:
1. Errors ~ Pixel Size & Coefficients
2. Immune to Local Errors =>
localized errors should have localized effect.

26
Multiple offsets of a single resolution scan?
2x2

27
Multiple offsets of a single resolution scan?
3x3

28
Multiple offsets of a single resolution scan?
4x2

29
Using boundary value conditions Assumption: or
Reconstruct using multiple scans with the same pixel resolution. Introduce a variable for each HR pixel of physical dimension . Algorithm: Perform c2 scans at all offsets & Solve linear equations (Gaussian
elimination).
mm
0000
000
CCC
CCC
0 C

30
Using boundary value conditionsExample: 4 Scans, PD=2x2
Second sample

31
Using boundary value conditionsExample: 4 Scans, PD=2x2
000
0

32
Using boundary value conditionsExample: 4 Scans, PD=2x2

33
Problems using boundary valuesExample: 4 Scans, PD=2x2
)0,0(

34
Problems using boundary valuesExample: 4 Scans, PD=2x2
-)1-,1(

35
Problems using boundary valuesExample: 4 Scans, PD=2x2
Add more information
•Solve using LS
•Propagation
problem

36
Demands On the algorithm No assumptions on the values
of the true image.
Over determined set of equations Use LS to reduce errors:
Error propagation will be localized.
????
????
???
???
2min bAx
lkl bklA &, where
A x b

37
The One dimensional algorithm Input: Pixel of dimension Notation:
gcd(x,y) – greatest common divisor of x & y.
(Extended Euclidean Algorithm)
, . gcd( , )a b ax by x y
Nyxyx , 1 & 1
ixiixv offset at pixel 1 theof value- ),,(
,a y b x

38
The One dimensional algorithm
(Extended Euclidean Algorithm)
, . gcd( , )a b ax by x y
Given all ( , ) & ( , )
We can compute all (gcd( , ), )
v x i v y i
v x y i
gcd( , ) 1 (1, )x y v i

39
One dimensional reconstruction

40
One dimensional reconstruction

41
The One dimensional algorithmAlgorithm: Given
w.l.g, let: a>0 & b<0
To compute , compute:
( , ),0
( , ),0
v x j j m x
v y i j m x
(gcd( , ), )v x y i
11
0 0
, ,ba
j j
v x i xj v y i yj

42
The One dimensional algorithmLocalized Reconstruction
1, 0, 0ax by a b
1 ( mod )ax y
Localized ReconstructionEffective Area: x+y high-resolution pixels

43
One dimensional reconstruction

44
Two and More Dimensions Given pixels of size:
Where x,y & z are relatively prime.Reconstruct 1x1 pixels.
Error Propagation is limited to an area of O(xyz) HR pixels.
, & x x y y z z
x x
y y
xy x
xy y
1xy
1-D
AlgorithmStack

45
Two and More Dimensions1
1
xy
xz
1x
1-D
Algorithm
gcd(xy,xz)=x
1
1
xy
zy
1y
gcd(xy,zy)=y
1
1
x
y
1 1

46
Example Two dimensional reconstruction
PD=5x5 PD=3x3 PD=15x1

47
Example Two dimensional reconstruction
PD=4x4 PD=3x3 PD=12x1

48
Example Two dimensional reconstruction
PD=5x5 PD=4x4 PD=20x1

49
Example Two dimensional reconstruction

50
Larger Dimensions
Generalize to Dimension k Using
k+1 relatively prime Low-Resolution pixels

51
Results
Model ResultsExperiment ResultsProblems…

52
Model Design
HR Scene Blur Sampling
LRImage
Noise
LRImage
LRImage
SRR
AlgorithmHR
Image

53
Results

54
Experiment
GE clinical 1.5T MRI
scanner was used. Phantom:
- plastic frames
- filled with water Three FOV: 230.4,
307.2 & 384 mm.

55
Experiment

56
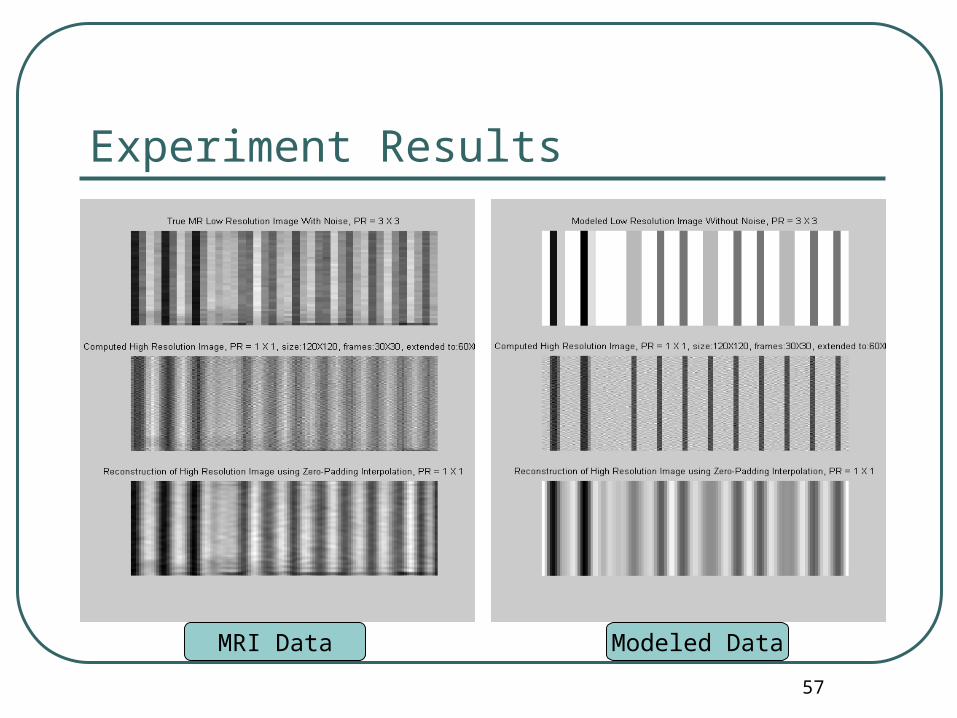
Experiment Results
Modeled DataMRI Data
57
Experiment Results
Modeled DataMRI Data

58
Problems
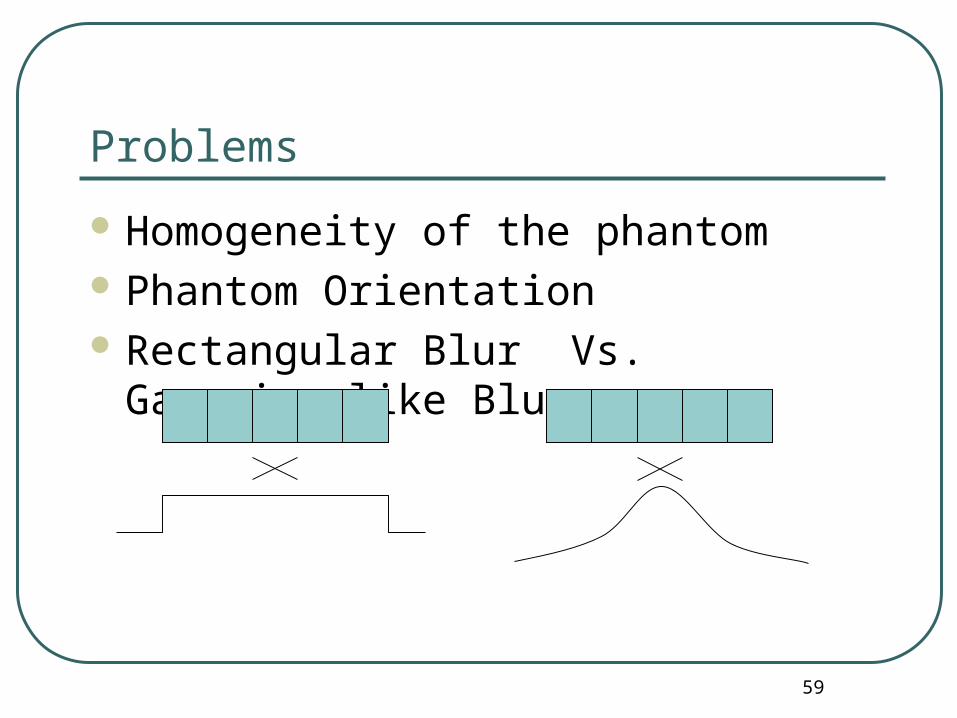
Homogeneity of the phantomPhantom Orientation
59
Problems
Homogeneity of the phantomPhantom OrientationRectangular Blur Vs. Gaussian-like Blur

60
Problems
Homogeneity of the phantomPhantom OrientationRectangular Blur Vs. Gauss-like Blur
Truncated

61
Problems
Homogeneity of the phantomPhantom OrientationRectangular Blur Vs. Gauss-like Blur k-space and Fourier based MRI

62
k-space and Fourier based MRIy
x
Wx
Wy
1-D path
k-space
Δkx
Sampling Points
DFT
2i kr
Object
S k r e dr
Δkx

63
Problems
# SamplesNoiseProblem
InfiniteNoOne scan is enough
InfiniteYesSNR too low
FiniteYesNo perfect reconstruction
Apply manual shifts → Different experiment

64
Open Problems
Optimization problems: “What is the smallest number of scans we can do to reconstruct the high resolution image?“

65
Scan Selection Problem

66
Scan Selection ProblemS5x and…

67
Scan Selection ProblemS3x and…

68
Open Problems
Optimization problems: “What is the smallest number of scans we can do to reconstruct the high resolution image?“
Decision/Optimization problem: Given a set of scans, what can we reconstruct?
Design problem: Plan a set of scans for “good” error localization.

69
Questions