1 software fault tolerance (swft) software testing dependable embedded systems & sw group prof....
TRANSCRIPT

1
Software Fault Tolerance (SWFT)Software Testing
Dependable Embedded Systems & SW Group www.deeds.informatik.tu-darmstadt.de
Prof. Neeraj Suri
Constantin Sârbu
Dept. of Computer ScienceTU Darmstadt, Germany
2
Fault Removal: Software Testing So far: checkpointing, recovery blocks, NVP, NCP, microreboots …
Verification & Validation Testing Techniques Static vs. Dynamic Black-box vs. White-box
Today: Testing of dependable systems Modeling Fault-injection (FI / SWIFI) Some existing tools for fault injection
Next 2 lectures: Testing of operating systems Fault injection aspects in OSs (WHEN / WHAT to inject) Profiling the OS extensions (state change @ runtime)

3
Why is PERFECT testing impossible? HW/OS/SW/Protocols our fault/error models are speculative failure modes and associated failure distributions are
probabilistic sequences (# of data cascades, # temporal links) do
not follow any meaningful distributions state space: fault classes only condense equivalent
behavior states – nothing more lack of details available! [processor level, gate,
device, transistor, VHDL?] fixing bugs often causes more bugs (bug re-injections) cause of bugs is more important: complex spec?
complex dependency?
How good are our system models?
4
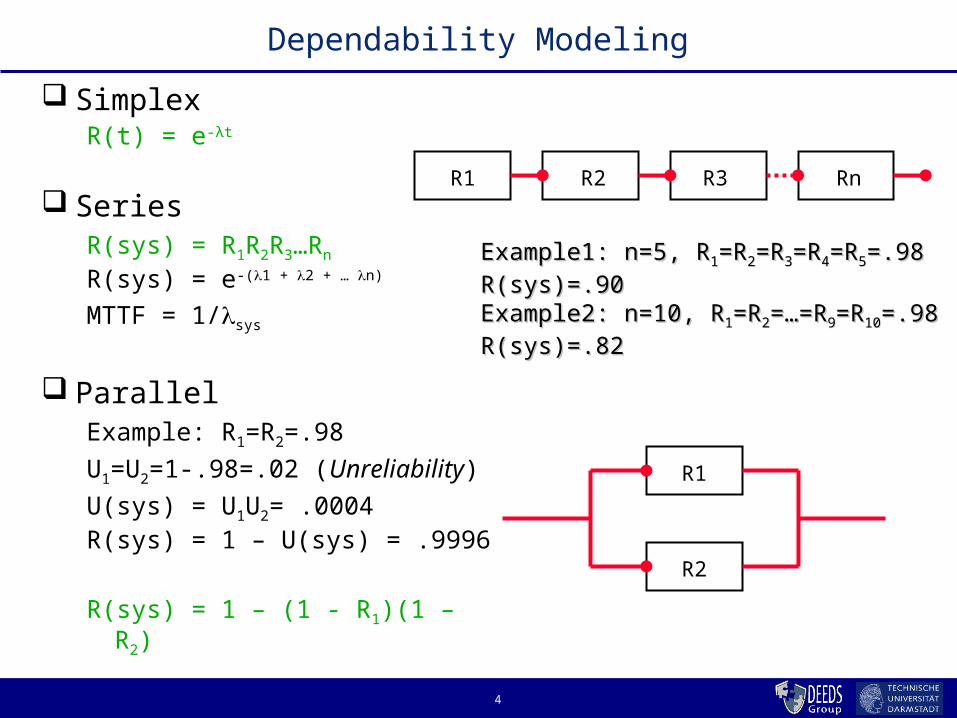
Dependability Modeling
SimplexR(t) = e-λt
Series R(sys) = R1R2R3…Rn R(sys) = e-(1 + 2 + … n)
MTTF = 1/sys
ParallelExample: R1=R2=.98
U1=U2=1-.98=.02 (Unreliability)
U(sys) = U1U2= .0004R(sys) = 1 – U(sys) = .9996
R(sys) = 1 – (1 - R1)(1 – R2)
R1 R2 R3 Rn
R1
R2
Example1: n=5, RExample1: n=5, R11=R=R22=R=R33=R=R44=R=R55=.98=.98R(sys)=.90R(sys)=.90Example2: n=10, RExample2: n=10, R11=R=R22=…=R=…=R99=R=R1010=.98=.98R(sys)=.82R(sys)=.82

5
Dependability Modeling
TMR: is this a parallel system? Works as long as two units
are fault-free Assumes independent faults Perfect voter No repair!
Reliability:
Where did this come from?
P1
P2
P3
= o/p tt eetR 32 23)(
6
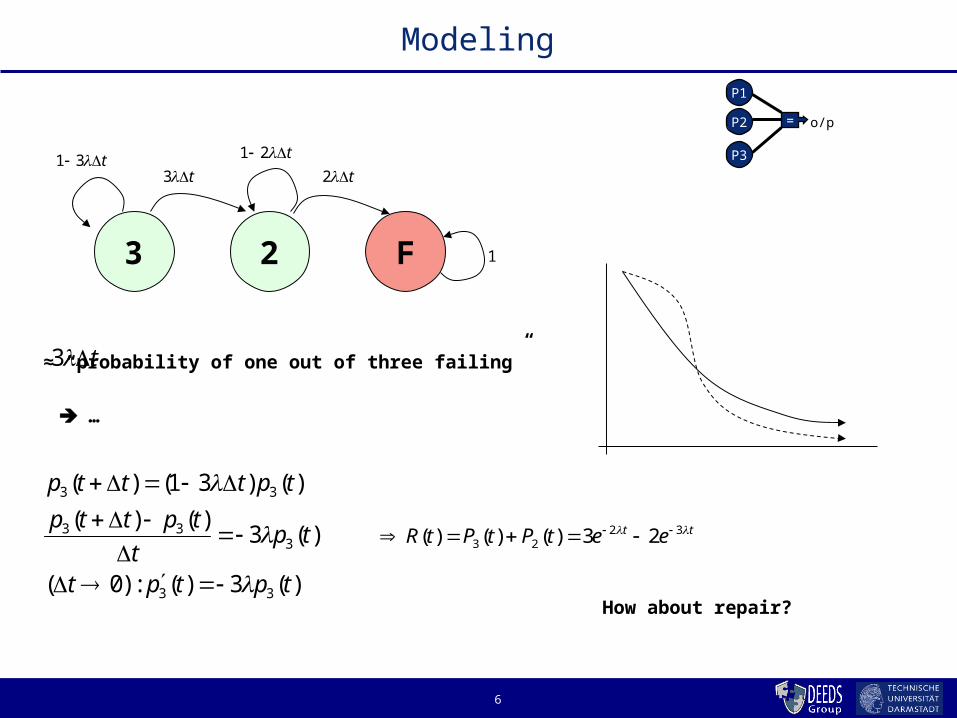
Modeling
P1
P2
P3
= o/p
2 F3
t3
t 21
t2
1
t3 ≈ “probability of one out of three failing”
…
)(3)(:)0(
)(3)()(
)()31()(
33
333
33
tptpt
tpt
tpttp
tptttp
tt eetPtPtR 3223 23)()()(
t 31
How about repair?

7
Modeling (Markov)
2 F3
t3
t 21
t2
1
t 31
t
Solving this system gives:
P1
P2
P3
= o/p
λ1
MTTF ntnonredunda =Do we always have perfect detection?
Can the system go directly from 3 to F?
2repair/w λ6μ
λ65
MTTF +=
but
λ65
MTTFrepairo/w
=
= 1000 h
= 833 h
= 17500 h
for λ = 0.001; µ =0.1
8
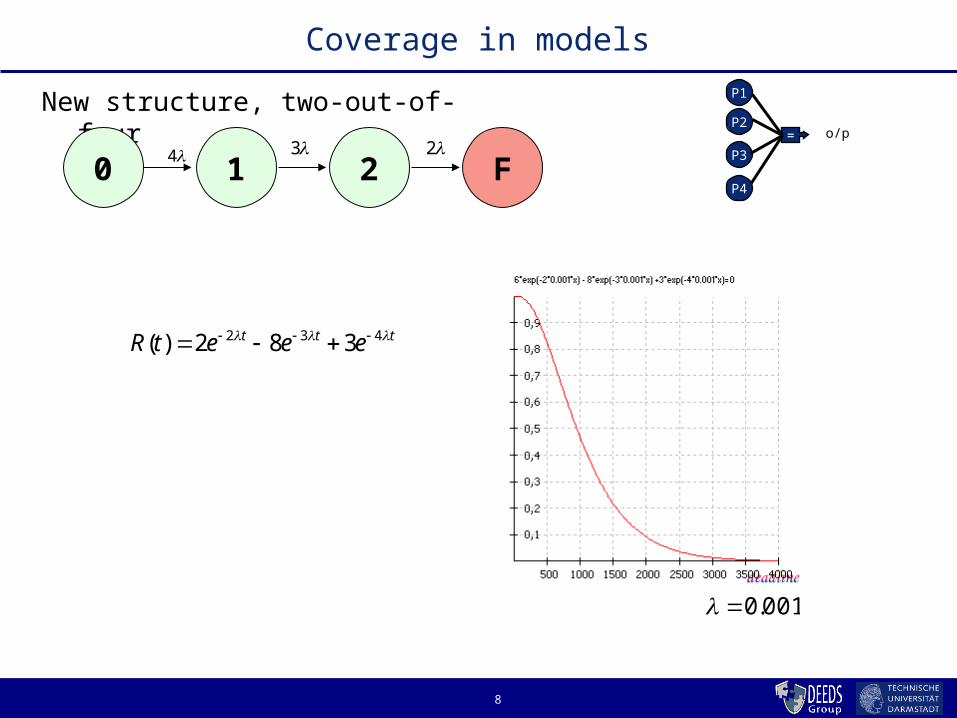
Coverage in models
New structure, two-out-of-four
2 F104 3 2
P1
P2
P3
= o/p
P4
ttt eeetR 432 382)(
001.0

9
Coverage in models
New structure, two-out-of-four P1
P2
P3
= o/p
P4
2234 )1(6)1(4)( ttttt eCeeeetR
5.0,001.0 C
2 F104 C3 2
)1(3 C
We add the coverage factor C
001.0

10
Fault Injection in One Sentence
Experimental evaluation using fault injection is the process of analyzing a system’s response to exceptional conditions by intentionally (& artificially) inserting abnormal states during normal operation and monitoring the reaction(s)
The Brute-Force Approach for Evaluating and Validating the Provisioning of Dependability
11
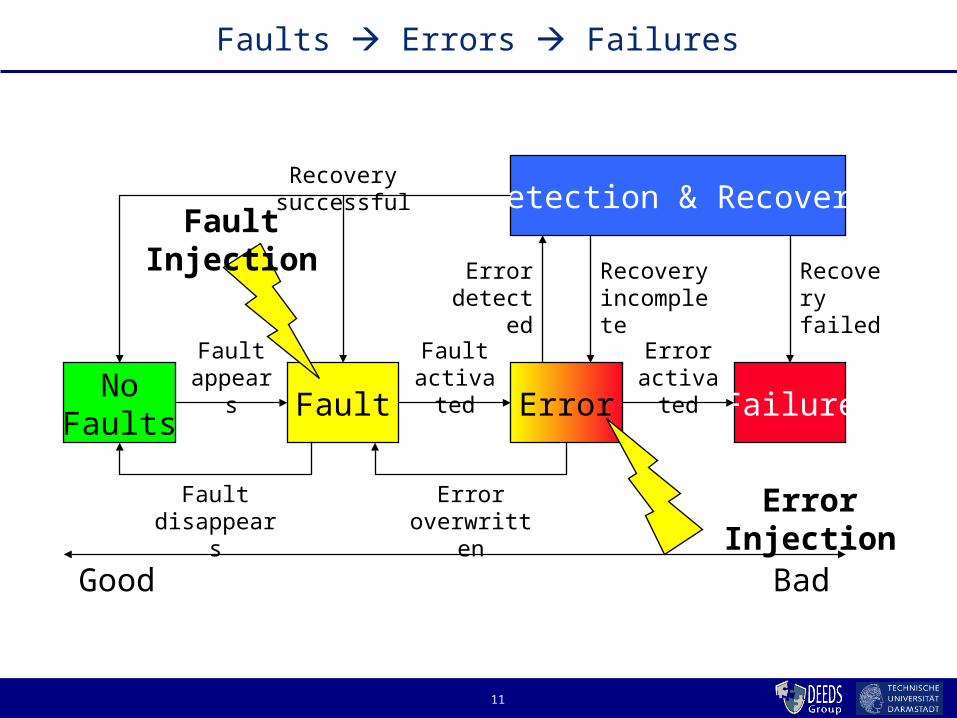
Faults Errors Failures
Fault Error Failure
Good Bad
Detection & Recovery
NoFaults
Fault appears
Fault activated
Error activated
Recovery failed
Fault disappears
Error overwritten
Recovery incomplete
Error detected
Recovery successful
Fault Injection
Error Injection

12
Basics of Fault Injection
Where: to apply change (location, abstraction/system level)
What: to inject (what should be injected/corrupted?) Which: trigger to use (event, instruction, timeout,
exception, code mutation?) When: to inject (corresponding to type of fault) How: often to inject (corresponding to type of fault) … What to record & interpret? To what purpose? How is the system loaded at the time of the
injection Applications running and their load (workload) System resources Real realistic synthetic workload

13
Various FI Approaches
Physical fault injection EMI, radiation, …
Simulated fault injection Injections into VHDL-model
Hardware fault-injection Pin-level injection Scan chains
Software implemented fault injection (SWIFI) Bit-flips, mutations Code and Data segments API’s, …

14
Coverage and Latency
Aim is to find characteristics of Event X Event X may be detection, recovery, etc.
Coverage of Event X Conditional probability of Event X occurring E.g. probability of error detection given that an error exists
in the system
Latency of Event X Time from the earliest (theoretically) possible occurrence
of Event X to the actual monitored occurrence E.g. time from error occurrence to error detection

15
Estimating Metrics in FI
Detection coverage = #detections/#injections Detection latency = mean (detection times) Recovery coverage = #recoveries/#detections Recovery latency = mean (recovery times)

16
Physical Fault Injection
Reproduce extreme environmental conditions EMI Radiation Heat Shock Voltage drops/spikes etc
Advantages “Real” faults Tangible Simple “test cases”
Disadvantages Difficult to control/repeat Needs at least a prototype
17
Simulation-based Fault Injection
Using a model of the system VHDL MatLab SystemC Spice
Advantages Usable during design Controllable
Disadvantages Requires a model Model accuracy? Slow

18
Simulated Fault Injection
Fault injection
Electrical level Logical level Functional level
Change currentChange voltage
Stuck at 0 or 1Inverted fault
Change CPU RegisterFlip memory bits, etc.
Electricalcircuits
Logic gatesFunctional
unitsPhysicalprocess
Logicoperation

19
Hardware-based Fault Injection
Inject faults using hardware (similar to physical) Pin-level injection Scan chains
Advantages Controllable Close to “real” faults
Disadvantages Requires special equipment Reachability?

20
SoftWare Implemented Fault Injection: SWIFI
Manipulate bits in memory locations and registers Emulation of HW faults Change text segment of processes
• Emulation of SW faults (bugs, defects) Dynamic: E.g., Op-code switch during operation Static: Change source code and recompile (a.k.a.
mutation)

21
SWIFI
PROS: No special hardware instrumentation Inexpensive and easy to control High observability (down to variables)
CONS: Only into locations accessible to software Instrumentation may disturb workload Difficult to observe short latency faults
Open questions: Is the injected fault representative of a “real” fault? Is the emulated/simulated environment (ops., load, tests)
representative of the real system?
22
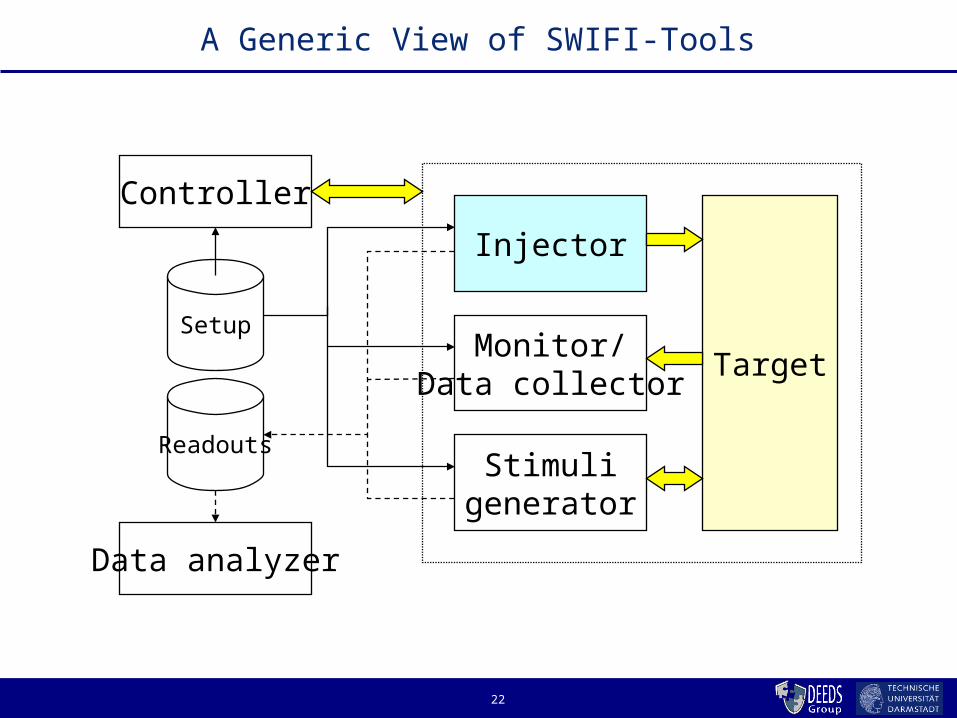
A Generic View of SWIFI-Tools
Controller
Data analyzer
Target
Injector
Stimuligenerator
Monitor/Data collector
Readouts
Setup
23
Many Tools Available
DEPEND, MEFISTO Evaluating HW/SW architectures using simulations
FERRARI, DOCTOR, RIFLE, Xception Evaluate tolerance against HW faults
DEFINE, FIAT, FTAPE Evaluate tolerance against HW and SW faults
MAFALDA, NFTAPE, PROPANE Evaluate effects of HW & SW faults and analyze error
propagation
Ballista OS Robustness testing

24
DEPEND and MEFISTO
Evaluation of system architectures E.g. validate TMR recovery protocols, synchronization
protocols etc.
Simulate system and components using SW DEPEND
uses object-oriented design for flexibility Models a system and it’s interactions and FTM’s
MEFISTO uses VHDL Testing of FTM’s Support for HW-based FI (validating Fault models)

25
FERRARI, DOCTOR and Xception
Evaluate system level effects of HW faults using SWIFI E.g. bit-errors in registers, address bus errors, etc.
FERRARI (Fault and ERRor Automatic Real-time Injector) Inject errors while applications are running Compare with golden run Registers, PC, Instruction type, branch and CC are targets
DOCTOR Injects CPU , memory and network faults Uses timeouts, traps and code mutations Used on distributed real-time systems
Xception (example on next slides) Uses debugging facilities in CPU’s

26
Xception
Goal: SWIFI using HW debugging support Minimizing intrusion using debugging interfaces Many fault triggers Detailed performance monitoring can be used Can affect any SW process (including kernel)
• No source code needed
Injector
Target App
Fault SetupExperiment
Manager
Module
Outputs
Faults
LogsResults
Fault Archive
Userspace
Kernelspace

27
Xception’s Fault Model
Duration Transient
Location Components inside processor
• Integer Unit, FPU, MMU, Buses, Registers, Branch processing
Trigger Temporal Opcode fetch, Operand load/store
Types Bit-flips Masks based on register/bus/memory sizes (e.g. 32 bits)

28
Xception
Data to collect Fault information System state information
• Instruction pointer etc Kernel and Application deviations
• Kernel error codes• Output of applications (workload)
Error detection status Performance monitoring information

29
Xception
Results for 4 node parallel computer running a Linda π calculation benchmark:
© J. Carreira et al, TOSE 24(2) 1998
Results for 4 node parallel computer running a Linda matrix multiplication benchmark (with FT algorithm):
© J. Carreira et al, TOSE 24(2) 1998
30
DEFINE, FIAT and FTAPE
Evaluate system level effects of HW and SW faults E.g. bit-errors in data and code defects
Define HW and SW faults for distributed systems Memory, CPU, buses and communication channels Synthetic WL Studied the impact of missing/corrupted messages and
client failures
FIAT (Fault Injection Automated Testing) Measures impact on WL applications Bit-level errors in target workload Limited fault manifestations

31
MAFALDA, NFTAPE and PROPANE
Evaluate effects of HW and SW faults, and analyze error propagation From system level down to variable level
Need instrumentation, but no HW-support MAFALDA focused on micro-kernels
Bit-flips in memory/data and API’s
NFTAPE tries to do everything in one tool! PROPANE purely software

32
Instrumentation Example (PROPANE)
int spherical_volume( double radius ){ double volume;
volume = 4.0 * (PI * pow(radius, 3.0)) / 3.0;
return volume;}
int spherical_volume( double radius ){ double volume;
/* Injection location for radius */ propane_inject( IL_SPHERE_VOL, &radius, PROPANE_DOUBLE );
/* Probe the value of radius */ propane_log_var( P_RADIUS, &radius );
volume = 4.0 * (PI * pow(radius, 3.0)) / 3.0;
/* Probe the value of volume */ propane_log_var( P_VOLUME, &volume );
return volume;}
Original codeOriginal code Instrumented codeInstrumented code

33
PROPANE
PROPANE = PROPagation ANalysis Environment
Highest Error RateHighest Error Rate
Lowest Error RateLowest Error Rate
ms_slot_nbr i
mscntpulscnt
slow_speed
stopped
IsValue
OutValue TOC2ADC
TCNTTIC1
PACNT
SetValue
CLOCK
PRES_S V_REG PRES_A
CALC
DIST_S

34
Code Mutations
Idea: Try to simulate real faults in binary code
1. Search real SW for faults2. Identify the fault patterns in the binaries3. Inject the patterns to your SW
35
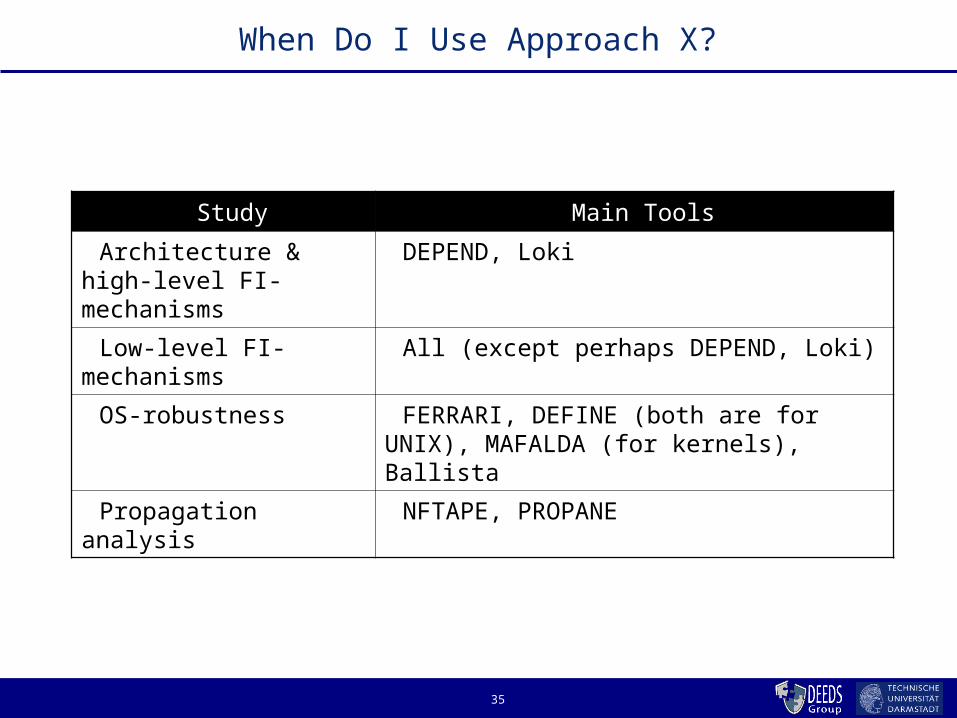
When Do I Use Approach X?
Study Main Tools
Architecture & high-level FI-mechanisms
DEPEND, Loki
Low-level FI-mechanisms
All (except perhaps DEPEND, Loki)
OS-robustness FERRARI, DEFINE (both are for UNIX), MAFALDA (for kernels), Ballista
Propagation analysis NFTAPE, PROPANE

36
Fault Injection
This is experimental and a statistical basis for establish a desired level of confidence in the system.
Keep in mind that:a) the statistical basis does not always apply to real systems esp.
SWb) statistically significant injections has little meaning if (a) appliesc) the injected fault is NOT the real fault

37
More Information
Iyer R., Tang D., ”Experimental Analysis of Computer System Dependability”, Chapter 5 in Pradhan’s book Fault-Tolerant Computer System Design, 1996
www.deeds.informatik.tu-darmstadt.de [Check papers on EPIC, Propane, M. Hiller’s PhD thesis]