1. sistemas físicos 1 - materias.fi.uba.armaterias.fi.uba.ar/7609/material/clase 02/02 01...
TRANSCRIPT

1
1. Sistemas Físicos 1. Sistemas Físicos _______________________________________________ 1
1.1. Introducción _________________________________________________________________ 2
1.2. Sistemas Mecánicos ___________________________________________________________ 3
1.3. Sistemas Eléctricos ____________________________________________________________ 5
1.4. Sistemas Hidráulicos __________________________________________________________ 7
1.5. Sistemas Múltiples ___________________________________________________________ 11

2
1.1. Introducción Sistemas lineales y no lineales. No existen sistemas lineales Pero, .... en este curso simplificaremos todos los sistemas a sistemas lineales.

3
1.2. Sistemas Mecánicos Ejemplo 1. Traslación Mecánica
Ley de Newton
ma F=∑ [1.1]
( ) ( ) ( ) ( )ma t bv t kx t p t= − − + [1.2]
( ) ( ) ( ) ( )2
2
d x t dx tm b kx t p t
dt dt= − − + [1.3]
( ) ( ) ( ) ( )2
2
d x t dx tm f kx t p t
dt dt+ + = [1.4]
[ ] [ ] [ ]2Nsegm m Ng m Nm seg mseg
+ + = [1.5]

4
Ejemplo 2. Rotación Mecánica
Ley de Newton
J Pα =∑ [1.6]
Ahora quiero ver cómo varía la velocidad
( ) ( ) ( )J t b t P tω ω= − +& [1.7]
[ ] [ ]22
rad radNmseg Nmseg Nmsegseg = +
[1.8]

5
1.3. Sistemas Eléctricos Ejemplo 3. Circuito Eléctrico
Ley de Kirchhoff 1diL Ri idt e
dt C+ + =∫ [1.9]
tensión en el condensador 1
ce idtC
= ∫ [1.10]
[ ] [ ][ ] [ ] [ ]1AH A Aseg Vseg F + Ω + =
[1.11]
En términos de carga eléctrica,
21 1 1dqddi dq d q dqdtL Ri idt L R q L R q
dt C dt dt C dt dt C+ + = + + = + +∫ [1.12]
2 1d q dqL R q edt dt C
+ + = [1.13]

6
comparar esta ecuación con la de traslación mecánica. Ejemplo 4. Sismógrafo
( ) ( )0 0 0 0i imx b x x k x x+ − + − =&& & &
( )0 iy x x= −
0my by ky+ + =&& &

7
1.4. Sistemas Hidráulicos Ejemplo 5. Nivel de Líquidos
oQ K H=
linealizando
0oq R h=
la constante
i odv q qdt
= −
i odhA q R hdt
= −

8
Ejemplo 6. Sistema de Dos Tanques
1 21
1
h hqR−
=
11 1dhA q qdt
= −
22
2
h qR
=
22 1 2dhA q qdt
= −

9
Ejemplo 7. Sistema Neumático
Se define
2 variaciòn de diferencia de presión de gasvariaciòn de caudal
Kgd P mR
Kgdqseg
∆ = = =
33
2
variaciòn de la masa de gas acumuladovariaciòn de presión de gas
Kgdm d mC V m
Kgdp dpm
ρ = = = =

10
en una aproximación, se puede considerar 1
gas
ddp nR Tρ=
para una misma temperatura, esta variación es constante En la figura, se intenta controlar la presión interior, variando la presión de entrada
0i op pd PR
dq q−∆
= ≈−
o o o
dm qdt dC Vdp dp dp
ρ= = =
oCdp qdt=
o i odp p pCdt R
−=
oo i
dpRC p pdt
+ =

11
1.5. Sistemas Múltiples Ejemplo 8. Sistemas múltiples
( )( )
1 1 1 1 2 1 1 1
2 2 1 2 1 2 2 2
m x b x x k x u
m x b x x k x u
+ − + =
+ − + =
&& & &
&& & &

12
Ejemplo 9. Acelerómetro la caja está unida a la estructura del avión
( ) ( ) ( )0 0 0 0i imx b x x k x x mgsen θ+ − + − − =&& & &
0 iy x x= −
( )senimy by ky mx mg θ+ + = − +&& & &&
nuevas variables
( )senmgz yk
θ= +
iw x= &&
mz bz kz mw+ + = −&& & b kz z z wm m
+ + = −&& &

13
Ejemplo 10. Tren de Engranajes
1 1 1 1 1 mJ f T Tθ θ+ + =&& &
2 2 2 2 3 2J f T Tθ θ+ + =&& &
igualdad de trabajos
1 1 2 2T Tθ θ=
22 1
1
NT TN
=
3 3 3 3 4lJ f T Tθ θ+ + =&& &
44 3
3
NT TN
=
3 313 2 1
4 2 4
N NNN N N
θ θ θ= =

14
( ) ( )31 11 1 1 1 2 2 2 2 3 3 3 3
2 2 4l m
NN NJ f J f J f T TN N N
θ θ θ θ θ θ+ + + + + + =&& & && & && &
2 2 22 2 2 2 23 3 31 1 1 1 1
1 2 3 1 1 2 3 12 2 2 2 2 2 2 22 2 4 2 2 4 2 4
l mN N NN N N N NJ J J f f f T T
N N N N N N N Nθ θ
+ + + + + + =
&& &
1 1 1 1 1eq eq eql mJ f T Tθ θ+ + =&& &

15
Ejemplo 11. Tanque Agitado
,i iF T
,F T
stF
h
QT
Masa total de líquido en el tanque
V Ahρ ρ= donde,
ρ : densidad del líquido (se supone independiente de la temperatura)
V : volumen del líquido ,A h : área del recipiente y altura del líquido

16
( ) ( ) ( )intE U K cin P pot= + +
como el tanque no se mueve
0dK dPdt dt
= = , 0dE dUdt dt
= =
para líquidos dU dHdt dt
siendo H la entalpía total del líquido en el tanque y es,
( ) ( )p ref p refH Vc T T Ahc T Tρ ρ= − = −
donde
pc : capacidad calórica del líquido en el tanque
refT : la temperatura a la cual la entalpía específica es cero.

17
Se definen las siguientes variables de estado: [ ]Tx h T=
parámetros constantes: , , ,p refA c Tρ
Balance de masa:
( )i
d AhF F
dtρ
ρ ρ= − ,iF F : caudales de entrada y salida
iAh F F= −&
Balance de energía:
.Acum de energía energía de entrada energía de salida energía del vaportiempo tiempo tiempo tiempo
= − +
( ) ( ) ( )p refi p ref i p ref
d Ahc T TdH Fc T T Fc T T Qdt dt
ρρ ρ
− = = − − − +
siendo Q la energía calórica por unidad de tiempo del vapor

18
suponiendo 0refT =
i ip
dhT QA FT FTdt cρ
= − +
( )i i ip
dhT dT dh dT QA Ah AT Ah T F F FT FTdt dt dt dt cρ
= + = + − = − +
( )i ip
dT QAh F T Tdt cρ
= − +
Las ecuaciones de estado son:
( )i
i ip
Ah F FQAhT F T Tcρ
= − = − +
&
&
variables de estado: [ ]Tx h T=
variables de salida (medidas): [ ]Ty h T=
variables de entrada (manipuladas): [ ]Tu Q F=

19
perturbaciones (no controladas): [ ]Ti id T F=
parámetros constantes: , , ,p refA c Tρ
Analizar: - equilibrio - una reducción de iT
- una reducción de iF
Linealización en un punto de trabajo. Equilibrio
( )
0
0
i
i ip
Ah F FQAhT F T Tcρ
= − = = − + =
&
& ( )0
00 0 0
i
ip
F F FQF T Tcρ
= =
− = −

20
desarrollo en serie entorno al punto de equilibrio
( ) ( ) ( ) ( ) ( )0 0 0 00
1 1 1ii i i
i
F F dh dhh F F F F F F F F F FA A dF dF A A A
= − + − + − = − − − = −
& &&
( ) ( )
( ) ( ) ( )
( ) ( ) ( )
0
0 0 00 0 0
0 02
0 0
1 1
i ii i
p p
i i ii i i i
ii
p p
F FQ QT T T T TAh c Ah Ah c Ah
T T F FF F T T T TAh Ah Ah
F QQ Q T T h hc Ah A c A h
ρ ρ
ρ ρ
= − + = − + +
−
+ − + − − − +
+ − − − + −
&
( ) ( )0 0 0 0 0 00 0 2
0 0 0 0 0
1 1i i i ii i i
p p
T T F F F QT F T T Q T T hAh Ah Ah c Ah A c A hρ ρ
−= + − + − − +
&
21
1212
21 2221 22 21
00 0 00
1 00 1
d i
d d i
b Tbh Qhb b Fa a bT FT
h hT T
= + +
=
&
&

22
Ejercicios

23

24
Ejemplo 12. Servomotores Dos tensiones desfadas 90 grados. Fase fija: 60, 400, 1000 Hz. El signo de Ec da el sentido de giro y el par
generado es proporcional a la amplitud de Ec. Relación torque-velocidad. Para cierto entorno
se puede considerar lineal. 2
2
m c
m c
J J n J
b b n b
= +
= +
n c cT K K E J bθ θ θ= − + = +& && &
( )n c cJ b K K Eθ θ+ − =&& &

25
26
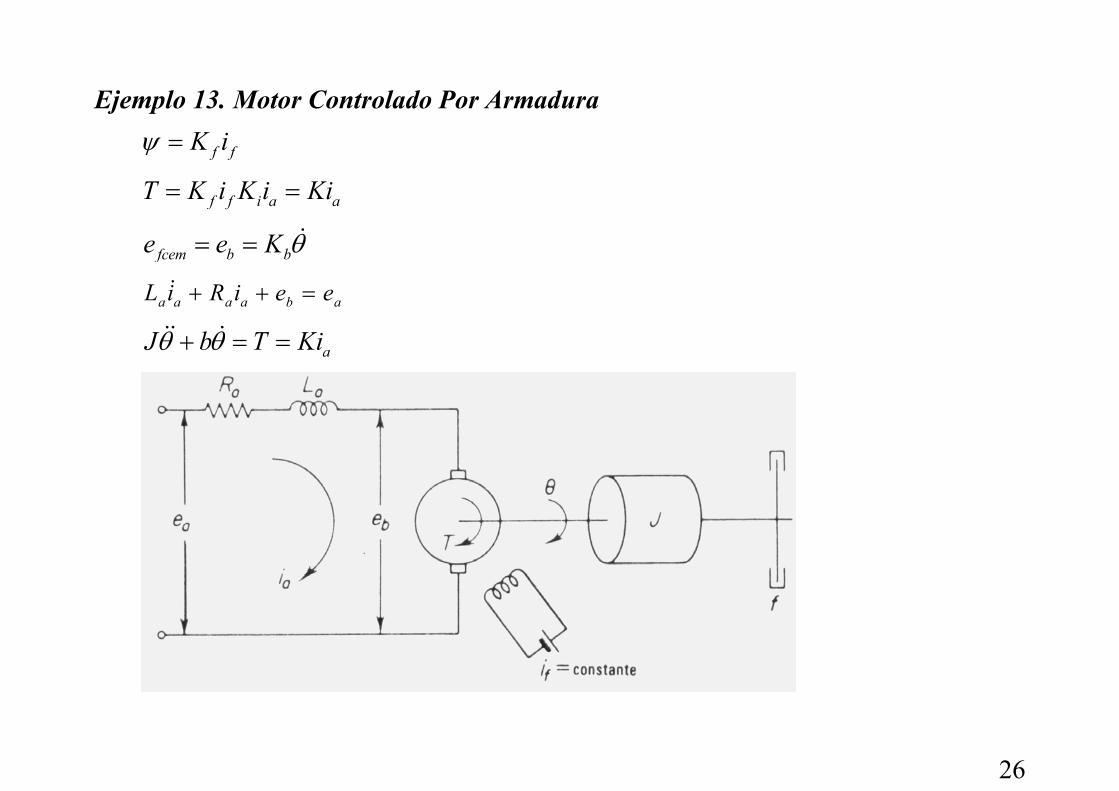
Ejemplo 13. Motor Controlado Por Armadura
f fK iψ =
f f i a aT K i K i Ki= =
fcem b be e K θ= = &
a a a a b aL i R i e e+ + =&
aJ b T Kiθ θ+ = =&& &
27
28
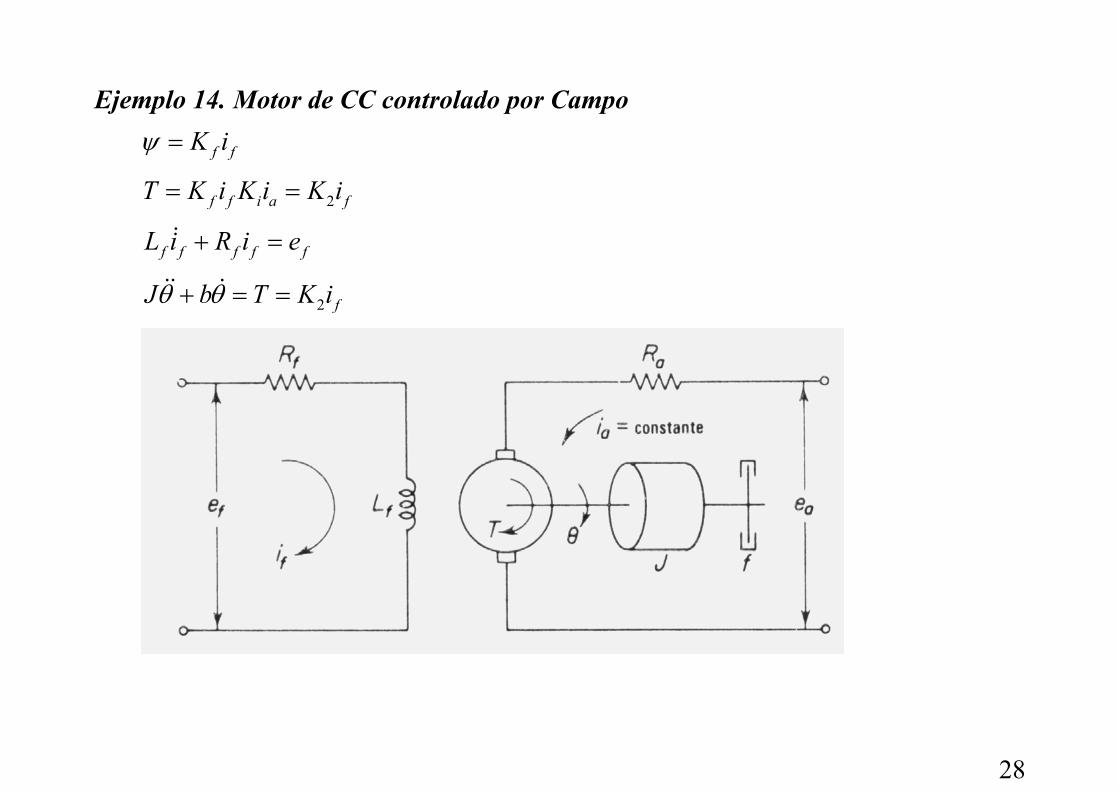
Ejemplo 14. Motor de CC controlado por Campo
f fK iψ =
2f f i a fT K i K i K i= =
f f f f fL i R i e+ =&
2 fJ b T K iθ θ+ = =&& &
29
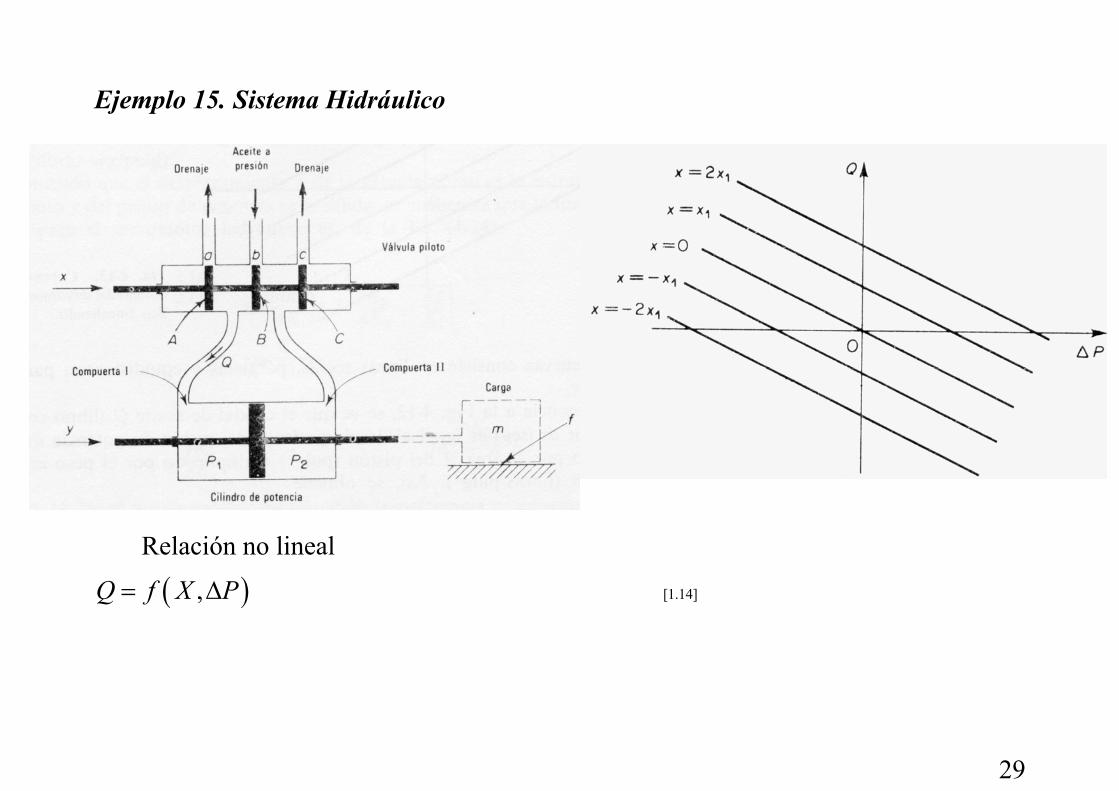
Ejemplo 15. Sistema Hidráulico
Relación no lineal
( ),Q f X P= ∆ [1.14]

30
Linealización sobre un punto de operación
( ) ( ) ( ),X X X XP P P P
Q QQ f X P Q Q X X P PX P= =
∆ =∆ ∆ =∆
∂ ∂− ∆ = − = − + ∆ − ∆ +
∂ ∂∆L [1.15]
Se podrían tomar incrementos
Q Q qX X xP P p
− =
− =
∆ − ∆ = ∆
[1.16]
1 2q k x k p= − ∆ [1.17]
Volúmenes A dy q dtρ = [1.18]
velocidad de salida dy qdt Aρ
= [1.19]
1 2dyA k x k pdt
ρ = − ∆ [1.20]

31
La fuerza desarrollada por el pistón es
12
A dyF A p k x Ak dt
ρ = ∆ = −
[1.21]
La ecuación de la carga
( )12
Amy by F k x A yk
ρ+ = = −&& & & [1.22]
21
2 2
AkAmy b y xk k
ρ
+ + =
&& & [1.23]

32
Cuádruple Tanque
( )( )( )
( )( )( )
21
1 1
2 21 2
3,7 13,762 1 23 1 62 1
4,7 1 4,730 1 90 1 90 1
s s sy uy u
s s s
γγ
γ γ
− + + + = −
+ + +