· camc-g-s3 2 festo – gdcp-camc-g-s3-es – 1406nh – español traducción del manual original...
TRANSCRIPT
CAMC-G-S3
Descripción
Funciones de
seguridad
– STO,
– SS1,
– SS2, – SOS,
– SBC,
– SLS,
– SSR,
– SSM
de conformidad conEN 61800-5-2
para controlador
del motor
CMMP-AS-...-M3
759297
1406NH
Módulo de seguridad
CAMC-G-S3
2 Festo – GDCP-CAMC-G-S3-ES – 1406NH – Español
Traducción del manual original
GDCP-CAMC-G-S3-ES
Heidenhain®, EnDat®, PHOENIX® son marcas registradas de los propietarios correspondientes de las
marcas en determinados países.
Identificación de peligros e indicaciones para evitarlos:
AdvertenciaPeligros que pueden ocasionar lesiones graves e incluso la muerte.
AtenciónPeligros que pueden ocasionar lesiones leves o daños materiales graves.
Otros símbolos:
NotaDaños materiales o pérdida de funcionalidad.
Recomendaciones, sugerencias y referencias a otras fuentes de documentación.
Accesorios indispensables o convenientes.
Información sobre el uso de los productos respetuoso con el medio ambiente.
Identificadores de texto:
� Actividades que se pueden realizar en cualquier orden.
1. Actividades que se tienen que realizar en el orden indicado.
– Enumeraciones generales.
CAMC-G-S3
Festo – GDCP-CAMC-G-S3-ES – 1406NH – Español 3
Contenido – CAMC-G-S3
1 Seguridad y requerimientos para el uso del producto 13. . . . . . . . . . . . . . . . . . . . . . . . . . . .
1.1 Seguridad 13. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
1.1.1 Medidas generales de seguridad 13. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
1.1.2 Uso previsto 13. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
1.1.3 Usos incorrectos previsibles 14. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
1.1.4 Nivel de seguridad alcanzable,
función de seguridad conforme a EN ISO 13849-1/EN 61800-5-2 15. . . . . . . . . . .
1.2 Requerimientos para el uso del producto 16. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
1.2.1 Requerimientos técnicos 16. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
1.2.2 Cualificaciones del personal técnico (requerimientos que debe cumplir el
personal) 16. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
1.2.3 Cobertura de diagnosis (DC) 16. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
1.2.4 Aplicaciones y certificaciones 17. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
2 Descripción del producto Módulo de seguridad CAMC-G-S3 18. . . . . . . . . . . . . . . . . . . . . . .
2.1 Guía de productos 18. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
2.1.1 Aplicación 18. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
2.1.2 Características 18. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
2.1.3 Equipos compatibles 19. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
2.1.4 Elementos de mando y conexiones 20. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
2.1.5 Dotación del suministro 20. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
2.2 Funcionamiento y aplicación 21. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
2.2.1 Cuadro general del sistema 21. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
2.2.2 Distribución de contactos del módulo de seguridad [X40] 23. . . . . . . . . . . . . . . . .
2.2.3 Cuadro general de las funciones de seguridad compatibles 25. . . . . . . . . . . . . . . .
2.2.4 Diagrama de funciones del módulo de seguridad 26. . . . . . . . . . . . . . . . . . . . . . . .
2.2.5 Resumen de sensores de posición compatibles 30. . . . . . . . . . . . . . . . . . . . . . . . .
2.2.6 Intercambio de datos y control del controlador de motor 33. . . . . . . . . . . . . . . . . .
2.2.7 Configurar las funciones de seguridad con el SafetyTool 36. . . . . . . . . . . . . . . . . .
2.3 Adquisición de datos desde el controlador de motor 37. . . . . . . . . . . . . . . . . . . . . . . . . . . . .
2.3.1 Informaciones básicas 38. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
2.3.2 Configuración de los transmisores 40. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
2.3.3 Parámetros para los sensores de posición 41. . . . . . . . . . . . . . . . . . . . . . . . . . . . .
2.3.4 Parámetros para la supervisión de transmisores y detección de las
revoluciones 43. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
2.3.5 Lista de todos los parámetros para la configuración de transmisores 46. . . . . . . .
2.4 Entradas digitales 48. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
2.4.1 Resumen 48. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
2.4.2 Entradas seguras de dos canales DIN40 … DIN43 [X40] 53. . . . . . . . . . . . . . . . . . .
2.4.3 Entradas digitales (limitadamente seguras) de un canal DIN44 … DIN49 [X40] 59.
CAMC-G-S3
4 Festo – GDCP-CAMC-G-S3-ES – 1406NH – Español
2.5 Funciones de seguridad 63. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
2.5.1 STO – Desconexión segura del par (Safe Torque Off ) 66. . . . . . . . . . . . . . . . . . . . .
2.5.2 SBC – Control seguro de freno (Safe Brake Control) 69. . . . . . . . . . . . . . . . . . . . . .
2.5.3 SS1 – Parada segura 1 (Safe Stop 1) 77. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
2.5.4 SS2 – Parada segura 2 (Safe Stop 2) 84. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
2.5.5 SOS – Parada de servicio segura (Safe Operating Stop) 91. . . . . . . . . . . . . . . . . . .
2.5.6 Funciones de seguridad universales USF 95. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
2.5.7 Funciones seguras de velocidad SSF 95. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
2.5.8 SLS – Velocidad con limitación segura (Safely-Limited Speed) 103. . . . . . . . . . . . .
2.5.9 SSR – Margen de velocidad seguro (Safe Speed Range) 104. . . . . . . . . . . . . . . . . .
2.5.10 SSM – Control de velocidad seguro (Safe Speed Monitor) 105. . . . . . . . . . . . . . . . .
2.6 Funciones lógicas 106. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
2.6.1 Selector del modo de funcionamiento 106. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
2.6.2 Terminal de mando de dos manos 108. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
2.6.3 Advanced Logic Functions – ALF 110. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
2.7 Rearranque 111. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
2.7.1 Volumen de funciones 111. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
2.7.2 Ejemplos y notas especiales para la implementación 112. . . . . . . . . . . . . . . . . . . . .
2.8 Gestión de errores y acuse de recibo de errores 114. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
2.8.1 Generación de errores y clases de errores 114. . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
2.8.2 Parametrización de la reacción ante errores del módulo de seguridad 117. . . . . . .
2.8.3 Lógica para acuse de recibo de error 118. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
2.9 Salidas digitales 120. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
2.9.1 Salidas seguras de dos canales DOUT40 … DOUT42 [X40] 120. . . . . . . . . . . . . . . . .
2.9.2 Control interno de freno del controlador de motor [X6] 124. . . . . . . . . . . . . . . . . . . .
2.9.3 Contacto de aviso C1, C2 [X40] 127. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
2.9.4 Alimentación auxiliar +24 V [X40] 129. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
2.10 Estado operativo e indicaciones de estado 130. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
2.10.1 Estados del sistema / Máquina de estado 130. . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
2.10.2 Indicador del estado en el módulo de seguridad 134. . . . . . . . . . . . . . . . . . . . . . . .
2.10.3 Visualizador digital de 7 segmentos del controlador de motor 135. . . . . . . . . . . . . .
2.11 Memoria de diagnosis permanente y temporal en el controlador de motor 135. . . . . . . . . . . .
2.12 Respuesta en función del tiempo 137. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
2.12.1 Tiempos de detección 137. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
2.12.2 Tiempo de respuesta al solicitar una función de seguridad 137. . . . . . . . . . . . . . . .
2.12.3 Tiempo de respuesta en caso de vulnerar una función de seguridad 139. . . . . . . . .
2.12.4 Otros tiempos para la detección de errores y comunicación 141. . . . . . . . . . . . . . .
2.13 Interruptores DIL 141. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
CAMC-G-S3
Festo – GDCP-CAMC-G-S3-ES – 1406NH – Español 5
3 Montaje e instalación 142. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
3.1 Montaje y desmontaje 142. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
3.2 Instalación eléctrica 144. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
3.2.1 Instrucciones de seguridad 144. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
3.2.2 Tierra funcional 145. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
3.2.3 Conexión [X40] 145. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
3.2.4 Circuito de protección mínimo para la primera puesta a punto [X40] 147. . . . . . . . .
3.3 Ejemplos de circuitos 148. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
3.3.1 Requisitos de seguridad a través de aparatos con contactos de conmutación 149.
3.3.2 Requisitos de seguridad a través de aparatos con salidas de semiconductores 150
3.3.3 Requisito de seguridad a través de un dispositivo de desconexión de seguridad 151
3.3.4 Encadenamiento de varios CMMP-AS-…-M3 con CAMC-G-S3 153. . . . . . . . . . . . . . .
3.3.5 Control de una unidad de bloqueo 155. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
3.3.6 Control de una unidad de bloqueo de 2 canales 156. . . . . . . . . . . . . . . . . . . . . . . . .
3.3.7 Conexión de encoders para funciones de seguridad dinámicas 157. . . . . . . . . . . . .
3.3.8 Activación de un bloque de válvulas de 2 canales con funciones de seguridad 158.
4 Puesta a punto 161. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
4.1 Antes de la puesta a punto 162. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
4.2 Ajuste de los interruptores DIL 162. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
4.3 Notas sobre la parametrización con el plugin de FCT CMMP-AS 163. . . . . . . . . . . . . . . . . . . . .
4.3.1 Ajuste de la configuración 163. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
4.3.2 Ajuste de la configuración de transmisores 163. . . . . . . . . . . . . . . . . . . . . . . . . . . . .
4.3.3 Determinar las unidades de medida (opcional) 164. . . . . . . . . . . . . . . . . . . . . . . . . .
4.3.4 Aceptación del módulo de seguridad 164. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
4.3.5 Indicación del estado 165. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
4.3.6 Visualizar memoria de diagnosis permanente del controlador de motor 165. . . . . .
4.4 Principios básicos de la parametrización del módulo de seguridad 168. . . . . . . . . . . . . . . . . .
4.4.1 Ajustes de fábrica 168. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
4.4.2 Estado de entrega 170. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
4.4.3 Plugin de FCT para CMMP-AS y SafetyTool 170. . . . . . . . . . . . . . . . . . . . . . . . . . . . .
4.5 Parametrización segura con el SafetyTool 171. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
4.5.1 Inicio del programa 171. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
4.5.2 Selección de los tipos de sesión: Asistente de configuración 171. . . . . . . . . . . . . . .
4.5.3 Parametrización Online 172. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
4.5.4 Parametrización Offline 174. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
4.5.5 Reglas básicas para la parametrización con el SafetyTool 175. . . . . . . . . . . . . . . . .
4.5.6 Comportamiento en caso de parametrización incorrecta 178. . . . . . . . . . . . . . . . . .
4.5.7 Versión del conjunto de parámetros 178. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
CAMC-G-S3
6 Festo – GDCP-CAMC-G-S3-ES – 1406NH – Español
4.6 Secuencia de la parametrización con el SafetyTool (ejemplo) 179. . . . . . . . . . . . . . . . . . . . . . .
4.6.1 Selección la variante de sesión en el asistente 180. . . . . . . . . . . . . . . . . . . . . . . . . .
4.6.2 Adquisición de datos y ajuste 181. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
4.6.3 Inicio de la parametrización 183. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
4.6.4 Verificación de la adquisición de datos 184. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
4.6.5 Informaciones básicas 184. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
4.6.6 Configuración de transmisores 184. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
4.6.7 Configurar entradas digitales 185. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
4.6.8 Selección y parametrización de las funciones de seguridad 186. . . . . . . . . . . . . . . .
4.6.9 Funciones lógicas 190. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
4.6.10 Lógica de acuse de recibo de error 191. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
4.6.11 Salidas digitales 191. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
4.6.12 Gestión de errores 191. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
4.6.13 Concluir la parametrización 191. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
4.7 Funciones especiales del SafetyTool 193. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
4.7.1 Modificar contraseña 193. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
4.7.2 Activar ajustes de fábrica 193. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
4.7.3 Verificación de plausibilidad 193. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
4.7.4 Resumen de parámetros 194. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
4.7.5 Ventana de diagnosis 195. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
4.8 Comprobación del funcionamiento, validación 197. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
5 Manejo y funcionamiento 200. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
5.1 Obligaciones de la empresa explotadora 200. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
5.2 Cuidados y mantenimiento 200. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
5.3 Funciones de protección 200. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
5.3.1 Alimentación, protección contra sobretensión e inversión de polaridad,
supervisión de tensión 200. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
5.3.2 Alimentación para la electrónica interna 200. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
5.3.3 Alimentación Failsafe 201. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
5.3.4 Funciones de protección para las salidas digitales 201. . . . . . . . . . . . . . . . . . . . . . .
5.3.5 Funciones de protección para las entradas digitales 201. . . . . . . . . . . . . . . . . . . . .
5.3.6 Funciones de protección para el control de freno 201. . . . . . . . . . . . . . . . . . . . . . . .
5.3.7 Funciones de protección de la alimentación para el accionamiento del
controlador 202. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
5.3.8 Funciones de protección para los sensores de posición conectados 202. . . . . . . . .
5.3.9 Funciones internas de protección de la electrónica en el módulo de seguridad 202
5.3.10 Supervisión del cumplimiento las funciones de seguridad solicitadas 203. . . . . . . .
5.4 Diagnosis y eliminación de fallos 204. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
5.4.1 Indicadores LED en el módulo de seguridad 204. . . . . . . . . . . . . . . . . . . . . . . . . . . .
5.4.2 Visualizador digital de 7 segmentos del controlador de motor 205. . . . . . . . . . . . . .
CAMC-G-S3
Festo – GDCP-CAMC-G-S3-ES – 1406NH – Español 7
5.5 Mensajes de error y tratamiento de errores 207. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
5.5.1 Números de error 207. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
5.5.2 Acuse de recibo de error 207. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
5.5.3 Mensajes de diagnosis 208. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
5.6 Mensajes de diagnosis con notas sobre la eliminación de fallos 209. . . . . . . . . . . . . . . . . . . . .
6 Mantenimiento, reparación, sustitución, eliminación 226. . . . . . . . . . . . . . . . . . . . . . . . . . . .
6.1 Mantenimiento 226. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
6.2 Reparación 226. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
6.3 Sustitución del módulo de seguridad 226. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
6.3.1 Desmontaje y montaje 227. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
6.3.2 Aceptación del módulo de seguridad 227. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
6.3.3 Nueva puesta a punto con el SafetyTool 227. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
6.4 Puesta fuera de servicio y eliminación 228. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
A Apéndice técnico 229. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
A.1 Especificaciones técnicas 229. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
A.1.1 Ingeniería de seguridad 229. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
A.1.2 Informaciones generales 230. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
A.1.3 Condiciones de operación y del entorno 231. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
A.1.4 Entradas digitales DIN40A/B hasta DIN43A/B y DIN44 hasta DIN49 [X40] 233. . . .
A.1.5 Salidas digitales DOUT40A/B hasta DOUT42A/B [X40] 234. . . . . . . . . . . . . . . . . . .
A.1.6 Contacto de aviso C1/C2 [X40] 235. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
A.1.7 Alimentación auxiliar de 24 V [X40] 235. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
A.1.8 Ejecución de los cables de conexión [X40] 236. . . . . . . . . . . . . . . . . . . . . . . . . . . . .
A.1.9 Salida digital para un freno de sostenimiento en la unidad básica [X6] 236. . . . . . .
A.2 Índices de seguridad 238. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
A.2.1 Funciones de seguridad 238. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
A.2.2 Entradas digitales 239. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
A.2.3 Sistemas de transmisores 241. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
A.2.4 Salidas digitales 258. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
A.3 Precisión del sistema y tiempo de respuesta 260. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
A.3.1 Precisión y supervisión de la posición (SOS) desde el punto de vista de la
aplicación 261. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
A.3.2 Precisión de la supervisión de la velocidad (SLS, SSR)
desde el punto de vista de la aplicación 262. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
A.3.3 Determinación de los parámetros relevantes para Safe Speed Stop (función de
velocidad segura) (con SLS, SSR) 263. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
A.3.4 Requerimientos para errores de transmisores desde el punto de vista de la
aplicación 264. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
A.3.5 Supervisión de longitud de vectores de señales analógicas de transmisor
(resolvedor, transmisor SEN/COS) 267. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
CAMC-G-S3
8 Festo – GDCP-CAMC-G-S3-ES – 1406NH – Español
A.3.6 Efecto de un error angular dentro de los límites de error de la supervisión de longitud
de vectores sobre la señal de velocidad 271. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
A.3.7 Base para la observación de la precisión del sistema 273. . . . . . . . . . . . . . . . . . . . .
A.4 Mensajes de estado, diagnosis a través de bus de campo 275. . . . . . . . . . . . . . . . . . . . . . . . .
A.4.1 Emisión de mensajes de estado a través de las salidas digitales de la unidad
básica 275. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
A.4.2 Mensajes de estado a través de bus de campo – Protocolo CiA 402 276. . . . . . . . .
A.4.3 Mensajes de estado a través de bus de campo – Protocolo FHPP 280. . . . . . . . . . .
A.5 Grabar datos de medición – “Trace” 283. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
A.5.1 Resumen 283. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
A.5.2 Configurar 283. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
A.5.3 Iniciar “Trace” 285. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
A.5.4 Ejemplo 285. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
B Lista de referencia de señales de mando y parámetros 287. . . . . . . . . . . . . . . . . . . . . . . . . . .
B.1 Lista de todas las señales lógicas 287. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
B.1.1 Entradas lógicas LIN 287. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
B.1.2 Entradas virtuales VIN 290. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
B.1.3 Salidas virturales VOUT 291. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
B.1.4 Salidas lógicas LOUT 293. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
B.1.5 Palabras de estado para el intercambio de datos / diagnosis a través de buses
de campo 294. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
B.2 Lista de parámetros adicionales 296. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
B.3 Lista de los objetos de comunicación más importantes de la unidad básica 303. . . . . . . . . . .
C Glosario 306. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
C.1 Términos de ingeniería de seguridad y abreviaciones 306. . . . . . . . . . . . . . . . . . . . . . . . . . . . .
C.2 Términos relativos al SafetyTool y a la parametrización segura 308. . . . . . . . . . . . . . . . . . . . .
CAMC-G-S3
Festo – GDCP-CAMC-G-S3-ES – 1406NH – Español 9
Notas sobre la presente documentaciónEsta documentación tiene como finalidad garantizar un trabajo seguro con las funciones de seguridad
– STO – Desconexión segura del par (Safe Torque Off )
– SS1 – Parada segura 1 (Safe Stop 1)
– SS2 – Parada segura 2 (Safe Stop 2)
– SOS – Parada de servicio segura (Safe Operating Stop)
– SLS – Velocidad con limitación segura (Safely-Limited Speed)
– SSR – Margen de velocidad seguro (Safe Speed Range)
– SSM – Control de velocidad seguro (Safe Speed Monitor)
– SBC – Control seguro de freno (Safe Brake Control)
de conformidad con EN 61800-5-2 al utilizar el módulo de seguridad CAMC-G-S3 para los controladores
de motor CMMP-AS-...-M3.
� Debe observar además necesariamente los reglamentos generales de seguridad del
CMMP-AS-…-M3.
Los reglamentos generales de seguridad para el CMMP-AS-...-M3 se encuentran en la
descripción “Montaje e instalación”, GDCP-CMMP-M3-HW-... � Tab. 3.
Observe las informaciones de seguridad y las condiciones previas para el uso del
producto en la sección 1.2.
Identificación del producto
La presente documentación se refiere a las siguientes versiones:
– Módulo de seguridad CAMC-G-S3, a partir de la revisión 01 (revisión total 1.1).
– Controlador de motor CMMP-AS-...-M3 con firmware a partir de la versión 4.0.1501.2.1 y
hardware a partir de la versión 6.0 (CMMP-AS-C2-3A-M3, CMMP-AS-C5-3A-M3) o a partir
de 4.1 (CMMP-AS-C5-11A-P3-M3, CMMP-AS-C10-11A-P3-M3).
– Plugin de FCT para CMMP-AS a partir de la versión 2.4.x.x con SafetyTool a partir de la
versión 1.0.x.x.
Estas son las primeras versiones disponibles o compatibles. Para versiones más recientes
o en caso de sustituir el módulo de seguridad, compruebe si las versiones son
compatibles � Documentación de la versión utilizada respectivamente.
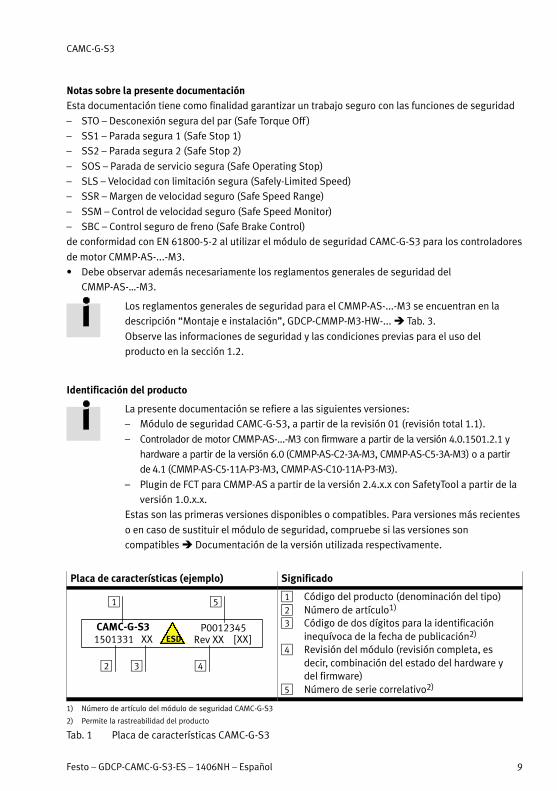
Placa de características (ejemplo) Significado
CAMC-G-S31501331 XX
P0012345Rev XXESD
1
2 3 4
5
[XX]
1 Código del producto (denominación del tipo)2 Número de artículo1)
3 Código de dos dígitos para la identificacióninequívoca de la fecha de publicación2)
4 Revisión del módulo (revisión completa, esdecir, combinación del estado del hardware ydel firmware)
5 Número de serie correlativo2)
1) Número de artículo del módulo de seguridad CAMC-G-S3
2) Permite la rastreabilidad del producto
Tab. 1 Placa de características CAMC-G-S3
CAMC-G-S3
10 Festo – GDCP-CAMC-G-S3-ES – 1406NH – Español
Servicio de postventaPara cualquier consulta técnica, diríjase a su representante regional de Festo.
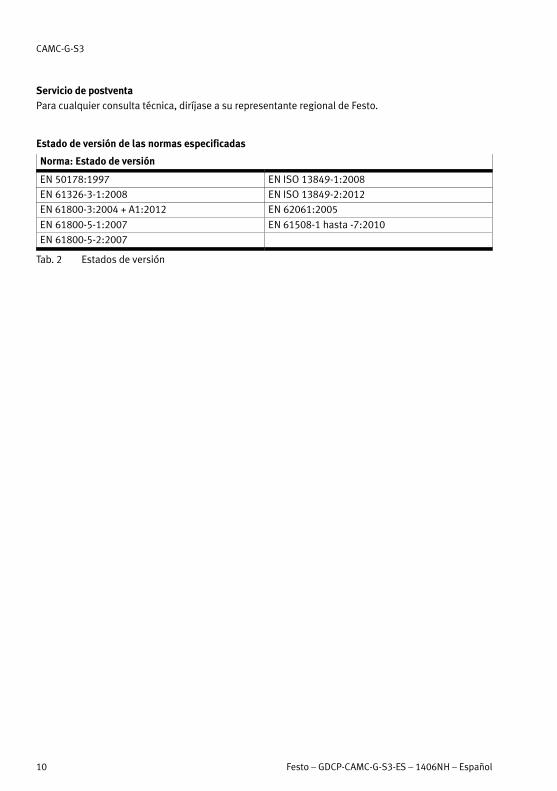
Estado de versión de las normas especificadas
Norma: Estado de versión
EN 50178:1997 EN ISO 13849-1:2008
EN 61326-3-1:2008 EN ISO 13849-2:2012
EN 61800-3:2004 + A1:2012 EN 62061:2005
EN 61800-5-1:2007 EN 61508-1 hasta -7:2010
EN 61800-5-2:2007
Tab. 2 Estados de versión
CAMC-G-S3
Festo – GDCP-CAMC-G-S3-ES – 1406NH – Español 11
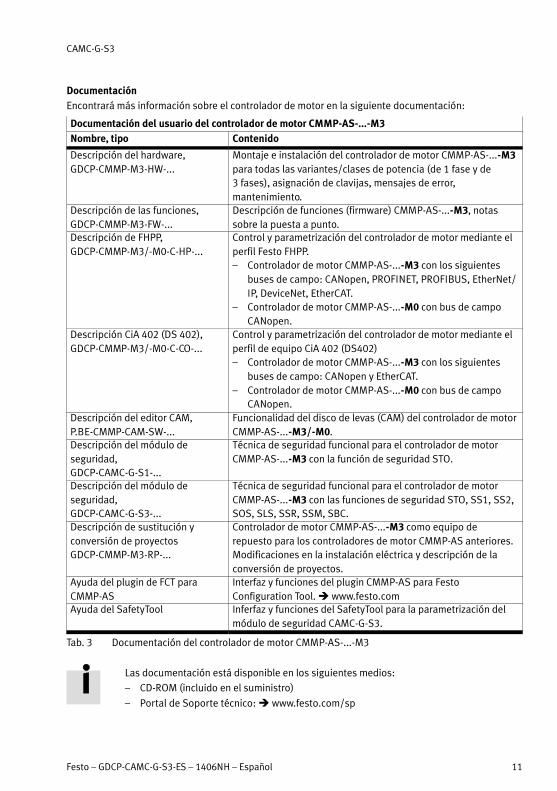
DocumentaciónEncontrará más información sobre el controlador de motor en la siguiente documentación:
Documentación del usuario del controlador de motor CMMP-AS-...-M3Nombre, tipo Contenido
Descripción del hardware, GDCP-CMMP-M3-HW-...
Montaje e instalación del controlador de motor CMMP-AS-...-M3para todas las variantes/clases de potencia (de 1 fase y de3 fases), asignación de clavijas, mensajes de error,mantenimiento.
Descripción de las funciones, GDCP-CMMP-M3-FW-...
Descripción de funciones (firmware) CMMP-AS-...-M3, notassobre la puesta a punto.
Descripción de FHPP, GDCP-CMMP-M3/-M0-C-HP-...
Control y parametrización del controlador de motor mediante elperfil Festo FHPP.– Controlador de motor CMMP-AS-...-M3 con los siguientes
buses de campo: CANopen, PROFINET, PROFIBUS, EtherNet/IP, DeviceNet, EtherCAT.
– Controlador de motor CMMP-AS-...-M0 con bus de campoCANopen.
Descripción CiA 402 (DS 402),GDCP-CMMP-M3/-M0-C-CO-...
Control y parametrización del controlador de motor mediante elperfil de equipo CiA 402 (DS402)– Controlador de motor CMMP-AS-...-M3 con los siguientes
buses de campo: CANopen y EtherCAT.– Controlador de motor CMMP-AS-...-M0 con bus de campo
CANopen.Descripción del editor CAM, P.BE-CMMP-CAM-SW-...
Funcionalidad del disco de levas (CAM) del controlador de motorCMMP-AS-...-M3/-M0.
Descripción del módulo deseguridad, GDCP-CAMC-G-S1-...
Técnica de seguridad funcional para el controlador de motorCMMP-AS-...-M3 con la función de seguridad STO.
Descripción del módulo deseguridad, GDCP-CAMC-G-S3-...
Técnica de seguridad funcional para el controlador de motorCMMP-AS-...-M3 con las funciones de seguridad STO, SS1, SS2,SOS, SLS, SSR, SSM, SBC.
Descripción de sustitución yconversión de proyectos GDCP-CMMP-M3-RP-...
Controlador de motor CMMP-AS-...-M3 como equipo derepuesto para los controladores de motor CMMP-AS anteriores.Modificaciones en la instalación eléctrica y descripción de laconversión de proyectos.
Ayuda del plugin de FCT paraCMMP-AS
Interfaz y funciones del plugin CMMP-AS para FestoConfiguration Tool. � www.festo.com
Ayuda del SafetyTool Inferfaz y funciones del SafetyTool para la parametrización delmódulo de seguridad CAMC-G-S3.
Tab. 3 Documentación del controlador de motor CMMP-AS-...-M3
Las documentación está disponible en los siguientes medios:
– CD-ROM (incluido en el suministro)
– Portal de Soporte técnico: � www.festo.com/sp
CAMC-G-S3
12 Festo – GDCP-CAMC-G-S3-ES – 1406NH – Español
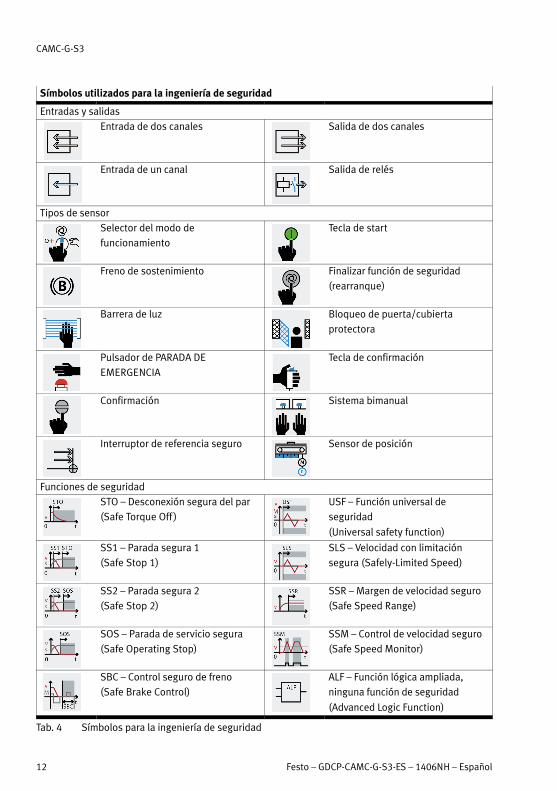
Símbolos utilizados para la ingeniería de seguridad
Entradas y salidas
Entrada de dos canales Salida de dos canales
Entrada de un canal Salida de relés
Tipos de sensor
Selector del modo de
funcionamiento
Tecla de start
Freno de sostenimiento Finalizar función de seguridad
(rearranque)
Barrera de luz Bloqueo de puerta/cubierta
protectora
Pulsador de PARADA DE
EMERGENCIA
Tecla de confirmación
Confirmación Sistema bimanual
Interruptor de referencia seguro Sensor de posición
Funciones de seguridad
STO – Desconexión segura del par
(Safe Torque Off )
USF – Función universal de
seguridad
(Universal safety function)
SS1 – Parada segura 1
(Safe Stop 1)
SLS – Velocidad con limitación
segura (Safely-Limited Speed)
SS2 – Parada segura 2
(Safe Stop 2)
SSR – Margen de velocidad seguro
(Safe Speed Range)
SOS – Parada de servicio segura
(Safe Operating Stop)
SSM – Control de velocidad seguro
(Safe Speed Monitor)
SBC – Control seguro de freno
(Safe Brake Control)
ALF – Función lógica ampliada,
ninguna función de seguridad
(Advanced Logic Function)
Tab. 4 Símbolos para la ingeniería de seguridad
1 Seguridad y requerimientos para el uso del producto
Festo – GDCP-CAMC-G-S3-ES – 1406NH – Español 13
1 Seguridad y requerimientos para el uso del producto
1.1 Seguridad
1.1.1 Medidas generales de seguridad
� Debe observar además necesariamente los reglamentos generales de seguridad del CMMP-AS-…-M3.
Las normas generales de seguridad relativas al CMMP-AS-...-M3 se encuentran en la
descripción del hardware, GDCP-CMMP-M3-HW-... � Tab. 3, página 11.
NotaMerma de la función de seguridad.
Si no se observan las condiciones del entorno y de conexión puede verse mermada la
función de seguridad.
� Observe las condiciones del entorno y de conexión especificadas, en especial las
tolerancias de la tensión de entrada � Especificaciones técnicas, Apéndice A.1.
NotaDaños en el módulo de seguridad o en el controlador de motor por una manipulación
inadecuada.� Desconecte las tensiones de alimentación antes de los trabajos de montaje e
instalación. Vuelva a conectar las tensiones de alimentación solo cuando los
trabajos de montaje e instalación hayan finalizado por completo.
� ¡Nunca desenchufe ni enchufe el módulo de seguridad del controlador de motor
mientras esté bajo tensión!
� Observe las especificaciones sobre manipulación de componentes sensibles a las
descargas electrostáticas.
1.1.2 Uso previsto
El módulo de seguridad CAMC-G-S3 sirve como ampliación del controlador de motor CMMP-AS-...-M3
para obtener la función de seguridad:
– STO – Desconexión segura del par (Safe Torque Off )
– SS1 – Parada segura 1 (Safe Stop 1)
– SS2 – Parada segura 2 (Safe Stop 2)
– SOS – Parada de servicio segura (Safe Operating Stop)
– SLS – Velocidad con limitación segura (Safely-Limited Speed)
– SSR – Margen de velocidad seguro (Safe Speed Range)
– SSM – Control de velocidad seguro (Safe Speed Monitor)
– SBC – Control seguro de freno (Safe Brake Control)
1 Seguridad y requerimientos para el uso del producto
14 Festo – GDCP-CAMC-G-S3-ES – 1406NH – Español
Si se utilizan sensores de posición adecuados y se acciona el módulo de seguridad adecuadamente, se
cumplen los requerimientos conforme a EN 61800-5-2 hasta SIL3 incluido o conforme a
EN ISO 13849-1 hasta categoría 4 / PL e incluida.
Dependiendo de los transmisores utilizados para la detección de posición se obtiene, dado el caso,
únicamente SIL2 � Sección 1.1.4.
El controlador de motor CMMP-AS-...-M3 con módulo de seguridad CAMC-G-S3 es un producto con
funciones relevantes para la seguridad previsto para ser instalado en máquinas o sistemas
automatizados y utilizado exclusivamente de la siguiente manera:
– en perfecto estado técnico,
– en su estado original, sin modificaciones no autorizadas,
– dentro de los límites del producto definidos en las especificaciones técnicas � Apéndice A.1,
– en el sector industrial.
El módulo de seguridad CAMC-G-S3 se puede utilizar en todos los controladores de motor
CMMP-AS-...-M3 que dispongan de la posición de enchufe Ext3 para la ingeniería de seguridad. No se
puede introducir en las posiciones de enchufe Ext1 ni Ext2 para interfaces.
NotaEn caso de daños surgidos por manipulaciones no autorizadas o usos no previstos
expirarán los derechos de garantía y de responsabilidad por parte del fabricante.
1.1.3 Usos incorrectos previsibles
Entre los usos no previstos, se cuentan los siguientes usos incorrectos previsibles:
– utilización en otro equipo que no sea el CMMP-AS-…-M3,
– utilización en exteriores,
– utilización en zonas no industriales (residenciales),
– utilización fuera de los límites definidos por las especificaciones técnicas del producto,
– modificaciones por parte del usuario.
Nota– La función STO no es suficiente como única función de seguridad en accionamientos
en los que actúa un par permanente (p. ej. cargas en suspensión). Tenga esto en
cuenta y tome las medidas adecuadas correspondientes, como p. ej. una unidad de
bloqueo.
– No está permitido puentear dispositivos de seguridad.
– No está permitido realizar reparaciones en el módulo de seguridad. Está permitida
la sustitución profesional del módulo de seguridad.
¡La función STO (Safe Torque Off ) no protege frente a descargas eléctricas, sino
exclusivamente frente a movimientos peligrosos! No tiene lugar ninguna separación del
actuador de la alimentación de energía en el sentido de la protección contra descargas
eléctricas � Descripción del hardware, GDCP-CMMP-M3-HW-...
1 Seguridad y requerimientos para el uso del producto
Festo – GDCP-CAMC-G-S3-ES – 1406NH – Español 15
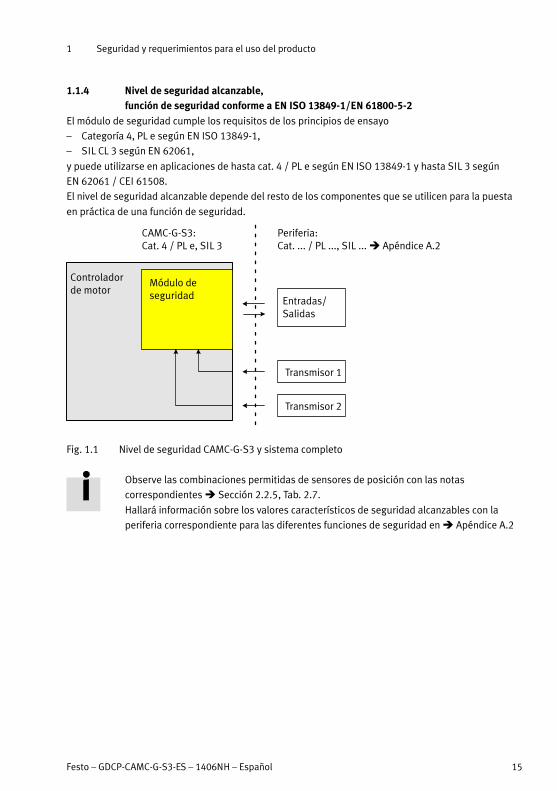
1.1.4 Nivel de seguridad alcanzable, función de seguridad conforme a EN ISO 13849-1/EN 61800-5-2
El módulo de seguridad cumple los requisitos de los principios de ensayo
– Categoría 4, PL e según EN ISO 13849-1,
– SIL CL 3 según EN 62061,
y puede utilizarse en aplicaciones de hasta cat. 4 / PL e según EN ISO 13849-1 y hasta SIL 3 según
EN 62061 / CEI 61508.
El nivel de seguridad alcanzable depende del resto de los componentes que se utilicen para la puesta
en práctica de una función de seguridad.
Controladorde motor
Módulo deseguridad Entradas/
Salidas
Transmisor 1
Transmisor 2
CAMC-G-S3: Cat. 4 / PL e, SIL 3
Periferia: Cat. ... / PL ..., SIL ... � Apéndice A.2
Fig. 1.1 Nivel de seguridad CAMC-G-S3 y sistema completo
Observe las combinaciones permitidas de sensores de posición con las notas
correspondientes � Sección 2.2.5, Tab. 2.7.
Hallará información sobre los valores característicos de seguridad alcanzables con la
periferia correspondiente para las diferentes funciones de seguridad en � Apéndice A.2
1 Seguridad y requerimientos para el uso del producto
16 Festo – GDCP-CAMC-G-S3-ES – 1406NH – Español
1.2 Requerimientos para el uso del producto
� Ponga esta documentación a disposición del ingeniero diseñador, del personal de montaje y del
personal encargado de la puesta a punto de la máquina o instalación en la que se utiliza este
producto.
� Deben observarse en todo momento las indicaciones de esta documentación. Tenga en cuenta
asimismo la documentación de los demás componentes y módulos (p. ej. controladores de motor,
cables etc.).
� Observe las reglamentaciones legales específicas del lugar de destino así como:
– las directivas y normas,
– las reglamentaciones de las organizaciones de inspección y empresas aseguradoras,
– las disposiciones nacionales.
� El módulo de seguridad cumple los requerimientos de la norma EN 61800-5-2. Para los demás
componentes de seguridad utilizados en la máquina así como para su aplicación son válidas en
general las directivas, reglamentos y normativas adicionales que también deben ser observadas.
� Para aplicaciones de parada de emergencia se debe prever una protección contra el rearranque
automático según la categoría exigida. Esto se puede realizar, por ejemplo, a través de un
dispositivo de DESCONEXIÓN de seguridad o de una parametrización adecuada del módulo de
seguridad CAMC-G-S3 � Sección 2.7.
1.2.1 Requerimientos técnicosIndicaciones generales a tener en cuenta siempre para garantizar un uso del producto seguro y
conforme a lo previsto:
� Observe las condiciones de conexión y ambientales determinadas en las especificaciones técnicas
del módulo de seguridad (� Apéndice A.1), del controlador de motor, así como de todos los
componentes conectados.
Este producto solo puede hacerse funcionar siguiendo las directrices correspondientes de
seguridad si se observan los límites máximos de cargas.
� Observe las advertencias y notas de esta documentación.
1.2.2 Cualificaciones del personal técnico (requerimientos que debe cumplir el personal)El aparato solo debe ser puesto a punto por una persona con formación electrotécnica que esté
familiarizada con:
– la instalación y el funcionamiento de sistemas de mando eléctricos,
– las directivas vigentes para la operación de instalaciones de seguridad,
– las directivas vigentes para la prevención de accidentes y seguridad laboral y
– la documentación del producto.
1.2.3 Cobertura de diagnosis (DC)La cobertura de diagnosis depende de la integración del controlador de motor en la cadena de mando,
de los motores/sensores de posición utilizados y de las medidas aplicadas para la diagnosis.
1 Seguridad y requerimientos para el uso del producto
Festo – GDCP-CAMC-G-S3-ES – 1406NH – Español 17
Si durante la diagnosis se detecta un fallo potencialmente peligroso, deberán tomarse las medidas
adecuadas para mantener el nivel de seguridad.
NotaLa reacción del módulo de seguridad a fallos detectados se puede parametrizar
correspondientemente, p. ej. activación de las funciones de seguridad SS1 y SBC en
caso de un circuito cruzado de señales de entrada seguras.
NotaCompruebe si en su aplicación se requiere una detección de circuitos cruzados del
circuito de entrada y del cableado de conexiones.
Si es necesario, utilice un dispositivo de desconexión de seguridad con detección de
circuitos cruzados para controlar el módulo de seguridad o bien las salidas seguras del
módulo de seguridad para la alimentación de aparatos de conexión pasivos en
combinación con las funciones de supervisión correspondientes para las entradas
seguras.
1.2.4 Aplicaciones y certificacionesEl controlador de motor con módulo de seguridad incorporado es un componente de seguridad
conforme a la Directiva de Máquinas 2006/42/CE; el controlador de motor está dotado de la marca CE.
Las normas y valores de prueba relativos a la seguridad que el producto respeta y cumple figuran en la
sección “Especificaciones técnicas” � Apéndice A.1. Consulte las normas y directivas EU
correspondientes al producto en la declaración de conformidad.
Los certificados y la declaración de conformidad de este producto se encuentran en
� www.festo.com/sp.
2 Descripción del producto Módulo de seguridad CAMC-G-S3
18 Festo – GDCP-CAMC-G-S3-ES – 1406NH – Español
2 Descripción del producto Módulo de seguridad CAMC-G-S3
2.1 Guía de productos
2.1.1 Aplicación
Con el aumento de la automatización, la protección de personas contra movimientos peligrosos tiene
un papel cada vez más importante. La seguridad funcional describe medidas necesarias mediante
dispositivos eléctricos o electrónicos para evitar o eliminar peligros causados por fallos de
funcionamiento. En funcionamiento normal, los dispositivos de protección impiden que las personas
tengan acceso a áreas de peligro. En determinados modos de funcionamiento, p. ej. durante la puesta a
punto, las personas tienen que permanecer en zonas de peligro. En estas situaciones, el operador de la
máquina debe estar protegido mediante medidas de accionamiento e internas del control.
La ingeniería de seguridad funcional integrada en el controlador de motor CMMP-AS-...-M3 con el
módulo de seguridad CAMC-G-S3 ofrece las condiciones de mando y accionamiento para la ejecución
óptima de funciones de seguridad. Los costes de planificación e instalación se reducen. Mediante el
uso de la ingeniería de seguridad funcional integrada se amplía la funcionalidad de las máquinas y
mejora su disponibilidad, en comparación con el uso de la ingeniería de seguridad convencional.
Los controladores de motor de la serie CMMP-AS-...-M3 se pueden equipar con módulos enchufables
para la ingeniería de seguridad funcional integrada. Están disponibles los módulos siguientes:
Type (Tipo) Descripción
CAMC-DS-M1 Módulo con interruptores DIL sin función de seguridad.
CAMC-G-S1 Módulo de seguridad con interruptores DIL y función STO.
CAMC-G-S3 Módulo de seguridad con las funciones STO, SS1, SS2, SOS, SBC, SLS, SSR,
SSM e interruptores DIL.
Tab. 2.1 Cuadro general de módulos de seguridad y módulos de microinterruptores para el
CMMP-AS-...-M3
2.1.2 Características
El módulo de seguridad CAMC-G-S3 posee las siguientes características:
– Obtener una o varias funciones de seguridad:
– STO – Desconexión segura del par (Safe Torque Off )
– SS1 – Parada segura 1 (Safe Stop 1)
– SS2 – Parada segura 2 (Safe Stop 2)
– SOS – Parada de servicio segura (Safe Operating Stop)
– SLS – Velocidad con limitación segura (Safely-Limited Speed)
– SSR – Margen de velocidad seguro (Safe Speed Range)
– SSM – Control de velocidad seguro (Safe Speed Monitor)
– SBC – Control seguro de freno (Safe Brake Control)
– Entradas de uno o de dos canales para solicitar las funciones de seguridad.
2 Descripción del producto Módulo de seguridad CAMC-G-S3
Festo – GDCP-CAMC-G-S3-ES – 1406NH – Español 19
– Salidas seguras para controlar otros elementos y funciones de seguridad.
– Contacto de recibo sin potencial para el estado operacional.
– Ejecución como módulo enchufable desde el exterior, que hace posible un equipamiento posterior.
Esta ingeniería de seguridad funcional integrada en el controlador de motor permite:
– Tiempos de respuesta más cortos gracias a una detección más rápida de los estados peligrosos.
– Una extensa detección de peligros mediante el acceso rápido y directo a numerosas señales y
magnitudes medidas en el controlador de motor.
– La evaluación de numerosos transmisores de posiciones, como p. ej. resolvedores, transmisores
SEN/COS, transmisores Hiperface, pero también la evaluación de sensores de posición con
protocolos en serie (ENDAT 2.2, BISS, ...)
– En caso necesario, el acceso rápido y directo a los valores nominales / control del regulador de
accionamiento. Un eje también puede detenerse de modo seguro y controlado sin intervención del
control / PLC funcional, o bien frenarse hasta una velocidad limitada.
– Una interacción directa entre el control secuencial en el controlador de motor y el módulo de
seguridad. De este modo, p. ej. la unidad de bloqueo o el freno de sostenimiento, tras solicitar la
función de seguridad SBC y el posterior rearranque, se abren solo después de que el controlador de
motor haya regulado activamente la posición. Se evita un “descenso brusco” de los ejes verticales,
se suprime la programación de una secuencia en el control funcional.
2.1.3 Equipos compatiblesEl módulo de seguridad CAMC-G-S3 se puede utilizar exclusivamente en controladores de motor como
se indica en la sección 1.1.2. Los controladores de motor CMMP-AS-...-M3 se suministran sin módulo
de seguridad ni módulo de microinterruptores en la posición de enchufe Ext3 para módulos de
seguridad.
Con el empleo del módulo de seguridad CAMC-G-S3 es posible la ampliación con las funciones de
seguridad funcional integrada para la supervisión y el control de movimientos orientados a la seguridad
descritos en esta documentación.
Si no es necesaria una función de seguridad, se debe pedir el módulo de
microinterruptores CAMC-DS-M1 y montarlo en la posición de enchufe Ext3.
2 Descripción del producto Módulo de seguridad CAMC-G-S3
20 Festo – GDCP-CAMC-G-S3-ES – 1406NH – Español
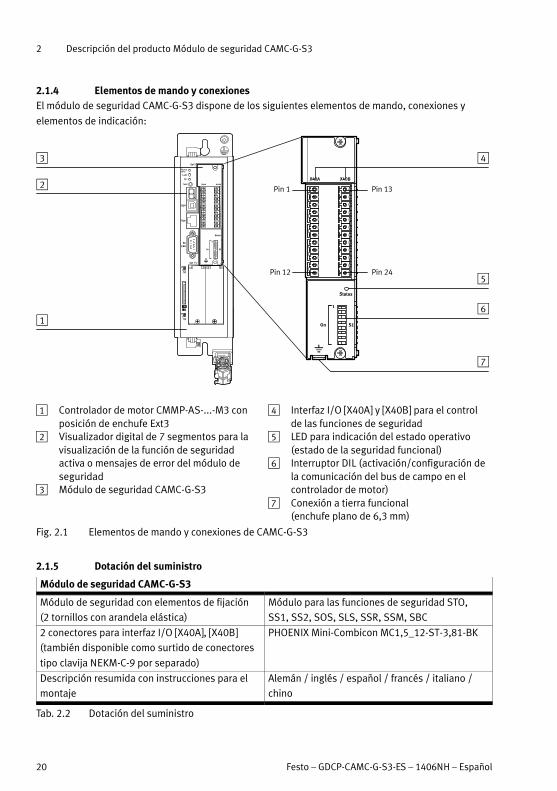
2.1.4 Elementos de mando y conexionesEl módulo de seguridad CAMC-G-S3 dispone de los siguientes elementos de mando, conexiones y
elementos de indicación:
5
6
2
3 4
1
Pin 13
7
Pin 24
Pin 1
Pin 12
1 Controlador de motor CMMP-AS-...-M3 conposición de enchufe Ext3
2 Visualizador digital de 7 segmentos para lavisualización de la función de seguridadactiva o mensajes de error del módulo deseguridad
3 Módulo de seguridad CAMC-G-S3
4 Interfaz I/O [X40A] y [X40B] para el controlde las funciones de seguridad
5 LED para indicación del estado operativo(estado de la seguridad funcional)
6 Interruptor DIL (activación/configuración dela comunicación del bus de campo en elcontrolador de motor)
7 Conexión a tierra funcional (enchufe plano de 6,3 mm)
Fig. 2.1 Elementos de mando y conexiones de CAMC-G-S3
2.1.5 Dotación del suministro
Módulo de seguridad CAMC-G-S3
Módulo de seguridad con elementos de fijación
(2 tornillos con arandela elástica)
Módulo para las funciones de seguridad STO,
SS1, SS2, SOS, SLS, SSR, SSM, SBC
2 conectores para interfaz I/O [X40A], [X40B]
(también disponible como surtido de conectores
tipo clavija NEKM-C-9 por separado)
PHOENIX MiniCombicon MC1,5_12ST-3,81-BK
Descripción resumida con instrucciones para el
montaje
Alemán / inglés / español / francés / italiano /
chino
Tab. 2.2 Dotación del suministro
2 Descripción del producto Módulo de seguridad CAMC-G-S3
Festo – GDCP-CAMC-G-S3-ES – 1406NH – Español 21
2.2 Funcionamiento y aplicación
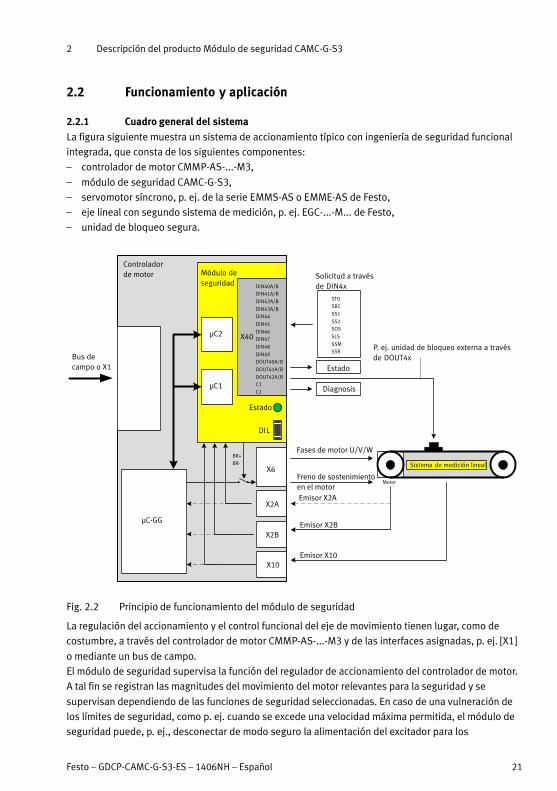
2.2.1 Cuadro general del sistema
La figura siguiente muestra un sistema de accionamiento típico con ingeniería de seguridad funcional
integrada, que consta de los siguientes componentes:
– controlador de motor CMMP-AS-...-M3,
– módulo de seguridad CAMC-G-S3,
– servomotor síncrono, p. ej. de la serie EMMS-AS o EMME-AS de Festo,
– eje lineal con segundo sistema de medición, p. ej. EGC-...-M... de Festo,
– unidad de bloqueo segura.
Motor
Bus decampo o X1
μC-GG
μC1
μC2
DIN40A/BDIN41A/B
DIN42A/B
DIN43A/BDIN44
DIN45
DIN46DIN47
DIN48
DIN49DOUT40A/B
DOUT41A/B
DOUT42A/BC1
C2
BR+BR-
STOSBC
SS1
SS2SOS
SLS
SSMSSR
Controladorde motor Módulo de
seguridadSolicitud a travésde DIN4x
P. ej. unidad de bloqueo externa a travésde DOUT4x
X40
Estado
DIL
Fases de motor U/V/W
Sistema de medición linealX6
X2A
X2B
X10
Freno de sostenimientoen el motor
Estado
Diagnosis
Emisor X2A
Emisor X2B
Emisor X10
Fig. 2.2 Principio de funcionamiento del módulo de seguridad
La regulación del accionamiento y el control funcional del eje de movimiento tienen lugar, como de
costumbre, a través del controlador de motor CMMP-AS-...-M3 y de las interfaces asignadas, p. ej. [X1]
o mediante un bus de campo.
El módulo de seguridad supervisa la función del regulador de accionamiento del controlador de motor.
A tal fin se registran las magnitudes del movimiento del motor relevantes para la seguridad y se
supervisan dependiendo de las funciones de seguridad seleccionadas. En caso de una vulneración de
los límites de seguridad, como p. ej. cuando se excede una velocidad máxima permitida, el módulo de
seguridad puede, p. ej., desconectar de modo seguro la alimentación del excitador para los
2 Descripción del producto Módulo de seguridad CAMC-G-S3
22 Festo – GDCP-CAMC-G-S3-ES – 1406NH – Español
semiconductores de potencia y con ello evitar que el paso de salida de potencia suministre la energía
requerida por el motor.
NotaUn fallo técnico o una avería de la fuente de alimentación conduce a una desconexión
del paso de salida de potencia del controlador de motor. Dependiendo de la aplicación,
las consecuencias pueden ser limitaciones en la seguridad.
La supervisión del eje orientada a la seguridad se realiza en el módulo de seguridad de la siguiente
manera:
– En el CAMC-G-S3 trabajan dos microcontroladores en una estructura redundante. Estos comparan
continuamente, durante el funcionamiento, todas las señales relevantes de entrada y salida así
como los datos del sensor de posición.
– Las funciones de seguridad en el CAMC-G-S3 se solicitan o activan a través de las entradas digitales
seguras en el módulo de seguridad, mediante otras funciones de seguridad o como reacción ante
errores. A través de conexiones lógicas es posible ajustar qué entradas digitales en qué
combinaciones de señales solicitan una función de seguridad.
– En cuanto una función de seguridad está activada tiene lugar la supervisión segura del estado de la
unidad básica y del eje.
– Para ello, el módulo de seguridad registra el movimiento del eje (posición, velocidad) a través del
sensor de posición en el motor y, dependiendo de la estructura del sistema, también a través de un
segundo sistema de medición.
– A tal fin, los sensores de posición se conectan, como es habitual, a [X2A], [X2B] y [X10] en la unidad
básica. Las señales se transmiten al módulo de seguridad internamente en el aparato.
Importante: Dependiendo de la clasificación de seguridad requerida y de la configuración
del eje, puede ser obligatoriamente necesario el segundo sistema de medición en el eje.
– Cuando el eje se encuentra en estado seguro, la función de seguridad comunica el estado SSR
“Safe State Reached”; en caso de vulneración de las condiciones de seguridad, la función de
seguridad comunica el estado SCV “Safety Condition Violated”.
– El módulo de seguridad dispone de salidas digitales seguras para comunicar el estado de seguridad
hacia fuera, p. ej. a un control de seguridad externo o a otro CAMC-G-S3 o hacia la alimentación de
entradas digitales con pulsos de prueba.
– El módulo de seguridad controla la salida de control de freno a través de una ruta interna del
aparato en la conexión de motor [X6] y permite de este modo la función de seguridad SBC en
combinación con una unidad de bloqueo debidamente certificada.
– Una unidad de bloqueo externa también se puede activar a través de una salida digital segura y un
aparato de conexión externo seguro.
Importante: Para utilizar la función de seguridad SBC debe utilizarse una unidad de
bloqueo con la clasificación de seguridad correspondiente. En principio, para todos los
tipos de frenos de sostenimiento o unidades de bloqueo sin certificación debe realizarse
siempre una evaluación de riesgos y determinar la idoneidad para la aplicación orientada
a la seguridad en cuestión. De no ser así, estos no se deben utilizar.
El freno de sostenimiento en motores en general no es apto y por lo tanto no es adecuado.
2 Descripción del producto Módulo de seguridad CAMC-G-S3
Festo – GDCP-CAMC-G-S3-ES – 1406NH – Español 23
– Para fines de diagnosis está disponible un contacto de señal libre de potencial
– Mediante un LED de estado y el visualizador digital de 7 segmentos de la unidad básica se visualiza
el estado de funcionamiento del módulo de seguridad
A través de una interfaz interna de comunicación se intercambian datos entre el módulo de seguridad y
la unidad básica.
– Esto permite a la unidad básica conocer siempre el estado de funcionamiento actual del módulo de
seguridad, p. ej., si se solicita y ejecuta una función de seguridad o si se detecta una vulneración de
una condición de seguridad.
– De este modo, el estado de funcionamiento de la ingeniería de seguridad también se puede
comunicar al control funcional a través de las distintas interfaces del bus de campo.
– El módulo de seguridad puede acceder activamente al control de la unidad básica sin desviarse a
través del control funcional. P. ej., en caso de solicitar la función de seguridad SS2, el actuador se
puede retardar activamente hasta la velocidad cero
Importante: Esta función es especialmente ventajosa cuando se desplazan ejes individuales.
No obstante, si el eje se desplaza en un modo de funcionamiento de interpolación (p. ej. CAN
interpolated position mode), esta función no tiene mucho sentido.
Otras funciones del firmware en el módulo de seguridad:
– Desconexión segura del controlador de motor en caso de error, reacción variable a distintos errores.
– Evaluación de las señales de las entradas seguras, supervisión del funcionamiento correcto del
hardware (pulsos de prueba).
– Control de las salidas seguras, supervisión del funcionamiento correcto del hardware.
– Supervisión segura del correcto funcionamiento del microcontrolador: prueba cíclica de la memoria
(RAM, Flash) y de la CPU.
– Supervisión de las tensiones de alimentación.
– Supervisión cruzada de los dos microcontroladores implicados.
– Gestión de los conjuntos de parámetros, realización de una parametrización segura y asegurada
mediante sumas de prueba y contraseña.
2.2.2 Distribución de contactos del módulo de seguridad [X40]
Para la distribución de contactos de las funciones de seguridad, el módulo de seguridad dispone de
una interfaz de 24 contactos [X40A/B] con las siguientes conexiones:
– 4 entradas de sensor digitales de dos canales con asignación configurable (entradas SIL3),
– 6 entradas de sensor digitales de un canal con asignación configurable (máx. entradas SIL2), p. ej., como
– 1 selector del modo de funcionamiento digital de 3 contactos
– 1 entrada para el acuse de recibo del error
– 1 entrada para el control del rearranque después de solicitar una función de seguridad
– 1 entrada para una señal de acuse de recibo de una unidad de bloqueo externa
– 3 entradas de sensor digitales de dos canales(SIL3) con asignación configurable, opcionalmente
utilizable como salida de ciclo,
– 1 contacto de recibo (contacto por relé) para fines de diagnosis,
– Potencial de referencia para todas las entradas y salidas,
– una alimentación de corriente de 24 V para sensores conectados.
2 Descripción del producto Módulo de seguridad CAMC-G-S3
24 Festo – GDCP-CAMC-G-S3-ES – 1406NH – Español
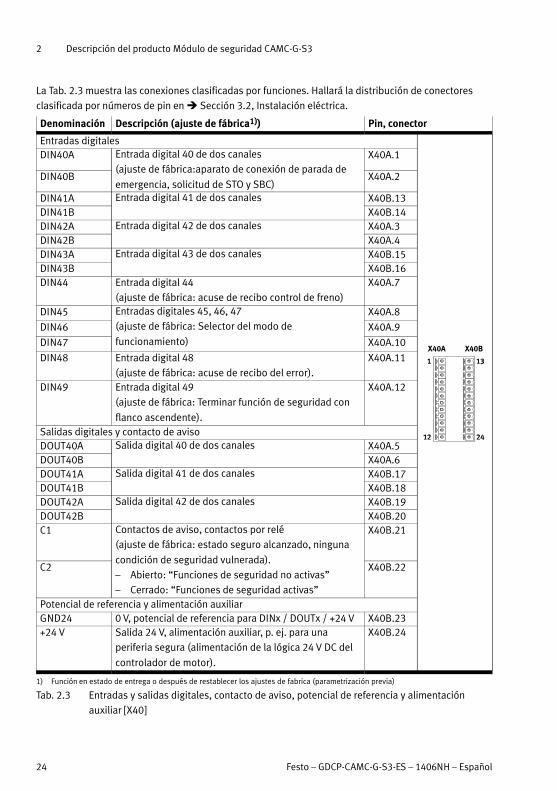
La Tab. 2.3 muestra las conexiones clasificadas por funciones. Hallará la distribución de conectores
clasificada por números de pin en � Sección 3.2, Instalación eléctrica.
Denominación Descripción (ajuste de fábrica1)) Pin, conector
Entradas digitales
X40A X40B
DIN40A Entrada digital 40 de dos canales
(ajuste de fábrica:aparato de conexión de parada de
emergencia, solicitud de STO y SBC)
X40A.1
DIN40B X40A.2
DIN41A Entrada digital 41 de dos canales X40B.13DIN41B X40B.14DIN42A Entrada digital 42 de dos canales X40A.3DIN42B X40A.4DIN43A Entrada digital 43 de dos canales X40B.15DIN43B X40B.16DIN44 Entrada digital 44
(ajuste de fábrica: acuse de recibo control de freno)
X40A.7
DIN45 Entradas digitales 45, 46, 47
(ajuste de fábrica: Selector del modo de
funcionamiento)
X40A.8
DIN46 X40A.9
DIN47 X40A.10
DIN48 Entrada digital 48
(ajuste de fábrica: acuse de recibo del error).
X40A.11
DIN49 Entrada digital 49
(ajuste de fábrica: Terminar función de seguridad con
flanco ascendente).
X40A.12
Salidas digitales y contacto de avisoDOUT40A Salida digital 40 de dos canales X40A.5DOUT40B X40A.6DOUT41A Salida digital 41 de dos canales X40B.17DOUT41B X40B.18DOUT42A Salida digital 42 de dos canales X40B.19DOUT42B X40B.20C1 Contactos de aviso, contactos por relé
(ajuste de fábrica: estado seguro alcanzado, ninguna
condición de seguridad vulnerada).
– Abierto: “Funciones de seguridad no activas”
– Cerrado: “Funciones de seguridad activas”
X40B.21
C2 X40B.22
Potencial de referencia y alimentación auxiliarGND24 0 V, potencial de referencia para DINx / DOUTx / +24 V X40B.23+24 V Salida 24 V, alimentación auxiliar, p. ej. para una
periferia segura (alimentación de la lógica 24 V DC del
controlador de motor).
X40B.24
1) Función en estado de entrega o después de restablecer los ajustes de fabrica (parametrización previa)
Tab. 2.3 Entradas y salidas digitales, contacto de aviso, potencial de referencia y alimentación
auxiliar [X40]
2 Descripción del producto Módulo de seguridad CAMC-G-S3
Festo – GDCP-CAMC-G-S3-ES – 1406NH – Español 25
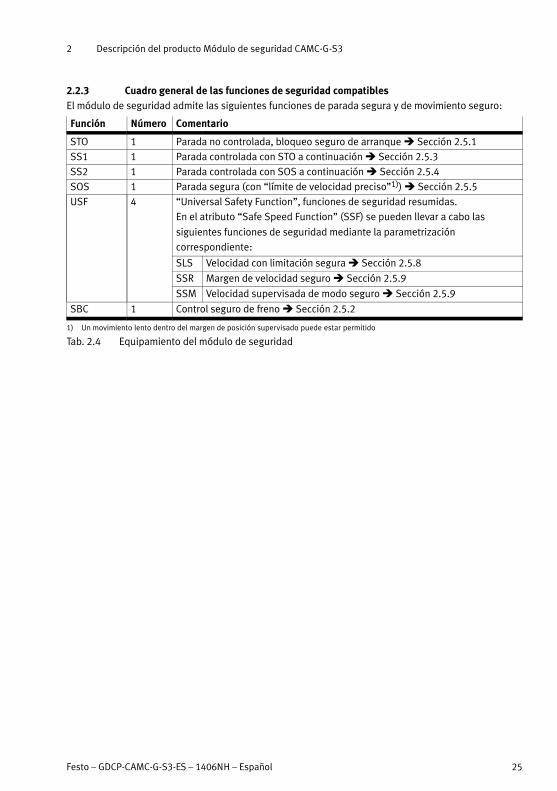
2.2.3 Cuadro general de las funciones de seguridad compatiblesEl módulo de seguridad admite las siguientes funciones de parada segura y de movimiento seguro:
Función Número Comentario
STO 1 Parada no controlada, bloqueo seguro de arranque � Sección 2.5.1
SS1 1 Parada controlada con STO a continuación � Sección 2.5.3
SS2 1 Parada controlada con SOS a continuación � Sección 2.5.4
SOS 1 Parada segura (con “límite de velocidad preciso”1)) � Sección 2.5.5
USF 4 “Universal Safety Function”, funciones de seguridad resumidas.
En el atributo “Safe Speed Function” (SSF) se pueden llevar a cabo las
siguientes funciones de seguridad mediante la parametrización
correspondiente:
SLS Velocidad con limitación segura � Sección 2.5.8
SSR Margen de velocidad seguro � Sección 2.5.9
SSM Velocidad supervisada de modo seguro � Sección 2.5.9
SBC 1 Control seguro de freno � Sección 2.5.2
1) Un movimiento lento dentro del margen de posición supervisado puede estar permitido
Tab. 2.4 Equipamiento del módulo de seguridad
2 Descripción del producto Módulo de seguridad CAMC-G-S3
26 Festo – GDCP-CAMC-G-S3-ES – 1406NH – Español
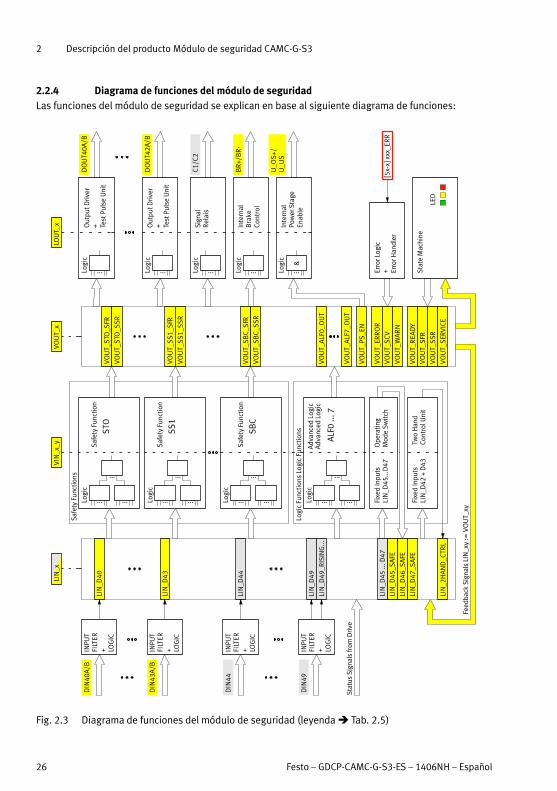
2.2.4 Diagrama de funciones del módulo de seguridadLas funciones del módulo de seguridad se explican en base al siguiente diagrama de funciones:
DO
UT4
0A/B
DO
UT4
2A/B
BR
+/B
R-
C1/C
2
U_O
S+/
U_U
S
[5x-
x] x
xx_E
RR
INPU
T FI
LTER
+ LOG
IC
Safe
ty F
unct
ions
Safe
ty F
unct
ion
STO
Logi
c
... ...
...
Safe
ty F
unct
ion
SS
1
Logi
c
... ...
...
Safe
ty F
unct
ion
SB
C
Logi
c
... ...
...
Logi
c Fu
nctio
ns L
ogic
Fun
ctio
ns
Adv
ance
d Lo
gic
Adv
ance
d Lo
gic
ALF
0 ...
7
Logi
c
... ...
...
Ope
ratin
g M
ode
Switc
hFi
xed
Inpu
tsLI
N_D
45...
D47
Two
Han
d Co
ntro
l Uni
tFi
xed
Inpu
tsLI
N_D
42 +
D43
LIN
_D47
_SA
FE
LIN
_2H
AN
D_C
TRL
LIN
_D46
_SA
FE
LIN
_D45
_SA
FELI
N_D
45 ..
. D47
LIN
_D49
LIN
_D44
LIN
_D43
LIN
_D40
VIN
_x_y
LIN
_x
VO
UT_
STO
_SFR
VO
UT_
x
VO
UT_
STO
_SS
R
VO
UT_
SS
1_S
FR
VO
UT_
SS
1_S
SR
VO
UT_
SB
C_S
FR
VO
UT_
SB
C_S
SR
VO
UT_
ALF
0_O
UT
VO
UT_
PS_E
N
VO
UT_
REA
DY
VO
UT_
SFR
VO
UT_
SS
R
VO
UT_
SER
VIC
E
VO
UT_
ERR
OR
VO
UT_
SCV
VO
UT_
WA
RN
VO
UT_
ALF
7_O
UT
DIN
40A
/B
DIN
43A
/B
DIN
44
DIN
49
Stat
us S
igna
ls fr
om D
rive
Feed
back
Sig
nals
LIN
_xy
:= V
OU
T_xy
Out
put D
rive
r + Te
st P
ulse
Uni
t
Logi
c
LOU
T_x
...
Out
put D
rive
r + Te
st P
ulse
Uni
t
Logi
c
...
Inte
rnal
B
rake
Cont
rol
Logi
c
...
Sign
al
Rel
ais
Logi
c
...
Inte
rnal
Po
wer
Sta
geEn
able
Stat
e M
achi
ne
Erro
r Log
ic
+ Erro
r Han
dler
LED
LIN
_D49
_RIS
ING
...
Logi
c...
INPU
T FI
LTER
+ LOG
IC
INPU
T FI
LTER
+ LOG
IC
INPU
T FI
LTER
+ LOG
IC
Fig. 2.3 Diagrama de funciones del módulo de seguridad (leyenda � Tab. 2.5)
2 Descripción del producto Módulo de seguridad CAMC-G-S3
Festo – GDCP-CAMC-G-S3-ES – 1406NH – Español 27
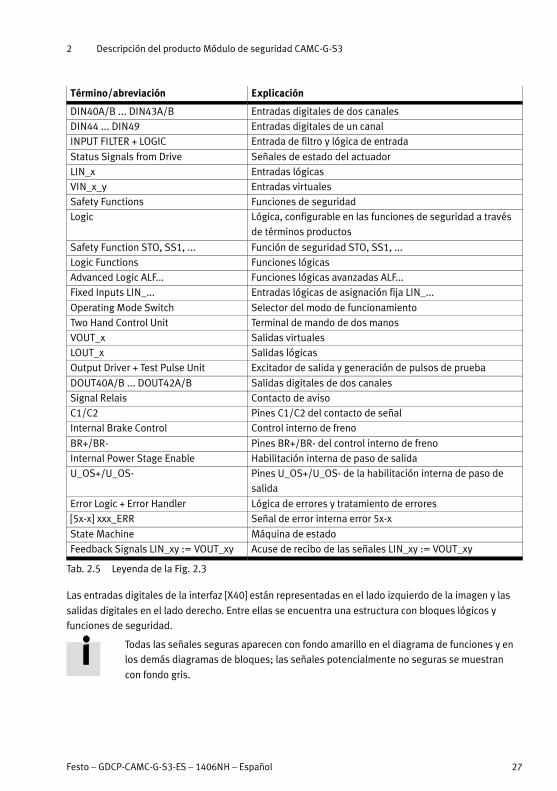
Término/abreviación Explicación
DIN40A/B ... DIN43A/B Entradas digitales de dos canales
DIN44 ... DIN49 Entradas digitales de un canal
INPUT FILTER + LOGIC Entrada de filtro y lógica de entrada
Status Signals from Drive Señales de estado del actuador
LIN_x Entradas lógicas
VIN_x_y Entradas virtuales
Safety Functions Funciones de seguridad
Logic Lógica, configurable en las funciones de seguridad a través
de términos productos
Safety Function STO, SS1, ... Función de seguridad STO, SS1, ...
Logic Functions Funciones lógicas
Advanced Logic ALF... Funciones lógicas avanzadas ALF...
Fixed Inputs LIN_... Entradas lógicas de asignación fija LIN_...
Operating Mode Switch Selector del modo de funcionamiento
Two Hand Control Unit Terminal de mando de dos manos
VOUT_x Salidas virtuales
LOUT_x Salidas lógicas
Output Driver + Test Pulse Unit Excitador de salida y generación de pulsos de prueba
DOUT40A/B ... DOUT42A/B Salidas digitales de dos canales
Signal Relais Contacto de aviso
C1/C2 Pines C1/C2 del contacto de señal
Internal Brake Control Control interno de freno
BR+/BR- Pines BR+/BR- del control interno de freno
Internal Power Stage Enable Habilitación interna de paso de salida
U_OS+/U_OS- Pines U_OS+/U_OS- de la habilitación interna de paso de
salida
Error Logic + Error Handler Lógica de errores y tratamiento de errores
[5x-x] xxx_ERR Señal de error interna error 5x-x
State Machine Máquina de estado
Feedback Signals LIN_xy := VOUT_xy Acuse de recibo de las señales LIN_xy := VOUT_xy
Tab. 2.5 Leyenda de la Fig. 2.3
Las entradas digitales de la interfaz [X40] están representadas en el lado izquierdo de la imagen y las
salidas digitales en el lado derecho. Entre ellas se encuentra una estructura con bloques lógicos y
funciones de seguridad.
Todas las señales seguras aparecen con fondo amarillo en el diagrama de funciones y en
los demás diagramas de bloques; las señales potencialmente no seguras se muestran
con fondo gris.
2 Descripción del producto Módulo de seguridad CAMC-G-S3
28 Festo – GDCP-CAMC-G-S3-ES – 1406NH – Español
Filtro de entrada y entradas lógicas:Las señales digitales de entrada en [X40] se filtran primero en el bloque funcional “Input Filter + Logic”.
Además, el bloque comprueba si hay pulsos de prueba en las señales de entrada y si estos son
plausibles. En las entradas de dos canales se comprueba si el nivel de entrada corresponde al tipo de
entrada (de conmutación equivalente / antivalente) y si las señales conmutan simultáneamente.
Como resultado de dichas comprobaciones se representan los estados lógicos de las señales de
entrada, marcadas en el diagrama de bloques con LIN_x “Logic Inputs”. P. ej., la señal LIN_D40
representa el estado lógico de conmutación de la entrada de dos canales DIN40.
Lista de las entradas lógicas � Sección B.1.1, Tab. B.2.
Funciones de seguridad:Las funciones de seguridad poseen algunas características unificadas:
A través de una función lógica configurable se define qué señales lógicas de entrada, LINs, se
conmutan a la función de seguridad para
– la demanda de la función de seguridad,
– la finalización de la demanda,
– la selección de señales de mando adicionales, siempre que sea necesario.
Estas señales de mando internas para las funciones de seguridad se denominan VIN_x_y “Virtual
Inputs”, p. ej., VIN_SS1_RSF designa la entrada para requerir (Request Safety Function) la función de
seguridad SS1. El estado de conmutación de dichas señales se puede leer y visualizar. Lista de las
salidas virtuales � Sección B.1.2, Tab. B.5.
Para la configuración de las condiciones de conmutación están disponibles en total 32
términos productos, comparables con un módulo lógico programable (PLD). Los términos
productos se pueden distribuir de modo flexible entre las distintas funciones.
Para cada señal de mando VIN_x_y para funciones lógicas o de seguridad, pero también
para la configuración de las salidas VOUT_x se pueden utilizar como máximo 4 términos
productos “O” vinculados con, como máximo, 7 entradas con o sin inversión.
Las entradas virtuales, que no tienen ningún término producto asignado, poseen el
estado lógico “0”.
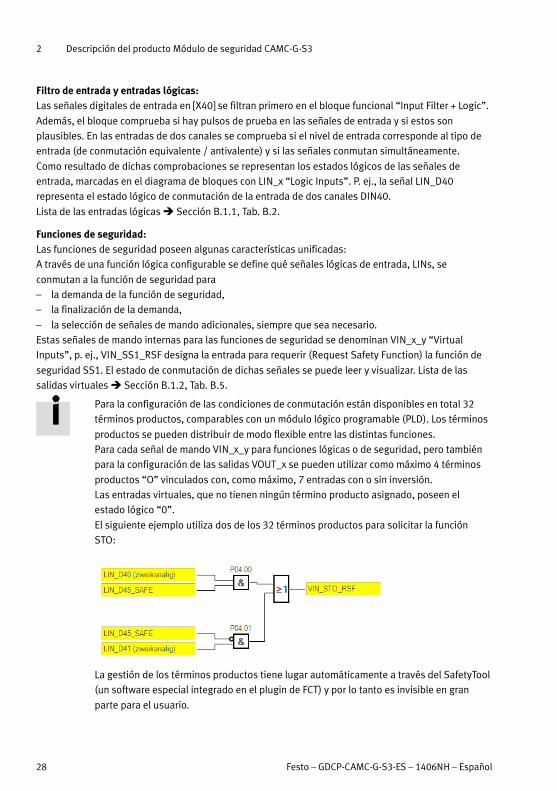
El siguiente ejemplo utiliza dos de los 32 términos productos para solicitar la función
STO:
La gestión de los términos productos tiene lugar automáticamente a través del SafetyTool
(un software especial integrado en el plugin de FCT) y por lo tanto es invisible en gran
parte para el usuario.
2 Descripción del producto Módulo de seguridad CAMC-G-S3
Festo – GDCP-CAMC-G-S3-ES – 1406NH – Español 29
La función de seguridad propiamente dicha contiene funciones lógicas y secuenciales. Tiene en cuenta
el estado actual del actuador (posición, velocidad) y ejecuta la supervisión del mismo. Cada función de
seguridad pone a disposición las siguientes señales de salida:
– el mensaje de estado que indica función de seguridad solicitada,
– el mensaje de estado que indica que se ha alcanzado el estado seguro,
– un mensaje de error en caso de vulnerar la condición de seguridad.
Algunas funciones de seguridad proporcionan, además, otras señales de mando para el accionamiento
directo de funciones en el regulador de accionamiento. Estos mensajes de estado están representados
en el diagrama de bloques en conjunto y se identifican con “Virtual Output Signals”.
Lista de las salidas virtuales � Sección B.1.2, Tab. B.5.
Funciones lógicas para las entradas:Para algunas aplicaciones son necesarias señales de mando lógicas especiales que se componen de
una combinación de varias señales de entrada. El módulo de seguridad admite dichas aplicaciones,
para ello proporciona funciones lógicas predefinidas para:
– el selector de modos de funcionamiento,
– el terminal de mando de dos manos
Las señales de salida de estos bloques lógicos se representan directamente en LIN_x, puesto que
también sirven para el control de funciones de seguridad.
No obstante, también es posible configurar bloques lógicos adicionales propios. A tal fin están
disponibles las denominadas ALF “Advanced Logic Functions” (funciones lógicas avanzadas) ALF0
hasta ALF7, cuyas señales de salida están a disposición como VOUT_x “Virtual Output Signals”
(señales de salidas virtuales). Lista de las salidas virtuales � Sección B.1.2, Tab. B.5.
Salidas lógicas y excitadores de salidas:
El módulo de seguridad dispone de bloques configurables con excitadores de potencia para:
– la activación de las salidas digitales con la generación de pulsos de prueba,
– la activación de la salida de relé,
– la activación de la unidad básica, p. ej. de la salidas para el control de freno y para la desconexión
de la alimentación de excitador para STO.
Por medio de una función lógica configurable se define qué señales VOUT se conmutan al excitador de
salida correspondiente como LOUT “Logic Output Signal” (señal de salida lógica).
La función lógica se compone de un término producto con siete entradas como máximo así como
inversión de entrada y salida. Lista de las salidas virtuales � Sección B.1.4, Tab. B.7.
El estado de la salida lógica (un bit) es convertido a las señales físicas de salida (a menudo dos
señales, configurables como antivalente / equivalente/ pulsos de prueba) por el excitaor de salida.
Acoplamiento regenerativo:Puesto que en algunas aplicaciones se desea ejecutar funciones de seguridad dependiendo del estado
de otra función lógica o de seguridad, el módulo de seguridad dispone de una ruta regenerativa
interna:
Por ello las señales VOUT más importantes son reconducidas a señales lógcas LIN y están disponibles
para operaciones lógicas.
Lista de las entradas lógicas � Sección B.1.1, Tab. B.2.
2 Descripción del producto Módulo de seguridad CAMC-G-S3
30 Festo – GDCP-CAMC-G-S3-ES – 1406NH – Español
Máquina de estado (State Machine):El estado operativo del módulo de seguridad se controla a través de una máquina de estado. El estado
operativo se visualiza por medio de un LED multicolor y además se representa en VOUT.
En � Sección 2.10 figura una descripción precisa de los estados operativos.
Gestión de errores:La gestión de errores controla cómo reacciona el módulo de seguridad cuando se producen errores.
La reacción ante errores más importante es la desconexión inmediata del paso de salida de potencia en
la unidad básica (Safe Torque Off, STO), así como la desconexión de todas las salidas seguras. Las
reacciones ante errores se pueden configurar � Sección 2.8.
2.2.5 Resumen de sensores de posición compatiblesLa supervisión segura de la velocidad (p. ej. para SLS) y de la posición (p. ej. para SOS) requiere los
sensores correspondientes para la detección de posición.
El controlador de motor CMMPAS...M3 es compatible con numerosos transmisores giratorios de
pulsos para la detección de posición y velocidad a través de las interfaces del dispositivo X2A, X2B y
X10. Las señales de los sensores de posición se transmiten desde el CMMP-AS-...-M3 al módulo de
seguridad, internamente en el aparato (� Fig. 2.2). La mayoría de transmisores giratorios también
pueden ser evaluados por el módulo de seguridad, puesto que las señales están disponibles para el
mismo. A través del transmisor giratorio se registran la posición y la velocidad.
El módulo de seguridad admite los siguientes transmisores giratorios de pulsos:
– resolvedores a través de X2A
– encoders incrementales SEN/COS a través de X2B
– transmisores giratorios de pulsos Hiperface SICK a través de X2B (solo canal de datos de proceso)
– transmisores Heidenhain ENDAT a través de X2B
– encoders incrementales con señales digitales A/B a través de X2B
– sensores de posición BISS para motores lineales a través de X2B
– encoders incrementales con señales digitales A/B a través de X10
A través del transmisor giratorio se registran la posición y la velocidad.
Las funciones de seguridad compatibles con el módulo de seguridad no requieren
conocimiento de la posición absoluta. Por ello no está prevista una evaluación segura de
la posición absoluta del transmisor ni un recorrido de referencia seguro.
Cada microcontrolador del módulo de seguridad puede evaluar hasta dos sensores de posición:
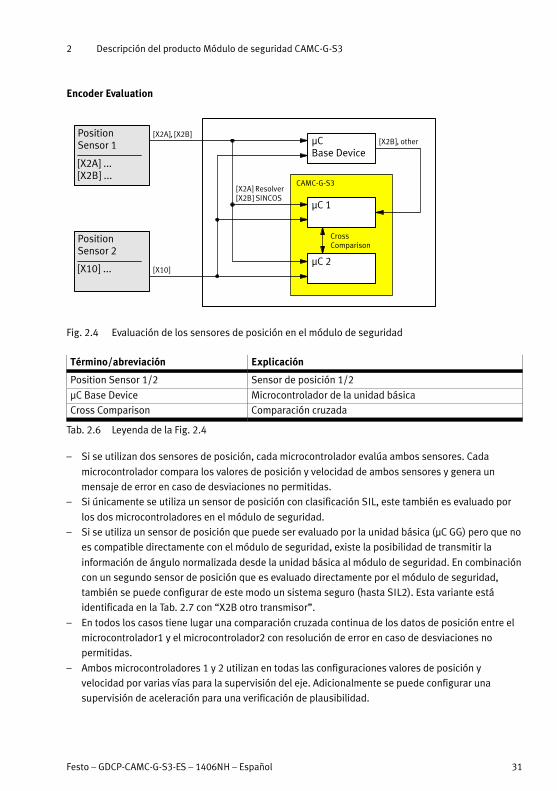
2 Descripción del producto Módulo de seguridad CAMC-G-S3
Festo – GDCP-CAMC-G-S3-ES – 1406NH – Español 31
Encoder Evaluation
μCBase Device
Position Sensor 1
[X2A] ...[X2B] ...
Position Sensor 2
[X10] ...
μC 1
μC 2
Cross Comparison
CAMC-G-S3
[X2A], [X2B][X2B], other
[X10]
[X2A] Resolver[X2B] SINCOS
Fig. 2.4 Evaluación de los sensores de posición en el módulo de seguridad
Término/abreviación Explicación
Position Sensor 1/2 Sensor de posición 1/2
μC Base Device Microcontrolador de la unidad básica
Cross Comparison Comparación cruzada
Tab. 2.6 Leyenda de la Fig. 2.4
– Si se utilizan dos sensores de posición, cada microcontrolador evalúa ambos sensores. Cada
microcontrolador compara los valores de posición y velocidad de ambos sensores y genera un
mensaje de error en caso de desviaciones no permitidas.
– Si únicamente se utiliza un sensor de posición con clasificación SIL, este también es evaluado por
los dos microcontroladores en el módulo de seguridad.
– Si se utiliza un sensor de posición que puede ser evaluado por la unidad básica (μC GG) pero que no
es compatible directamente con el módulo de seguridad, existe la posibilidad de transmitir la
información de ángulo normalizada desde la unidad básica al módulo de seguridad. En combinación
con un segundo sensor de posición que es evaluado directamente por el módulo de seguridad,
también se puede configurar de este modo un sistema seguro (hasta SIL2). Esta variante está
identificada en la Tab. 2.7 con “X2B otro transmisor”.
– En todos los casos tiene lugar una comparación cruzada continua de los datos de posición entre el
microcontrolador1 y el microcontrolador2 con resolución de error en caso de desviaciones no
permitidas.
– Ambos microcontroladores 1 y 2 utilizan en todas las configuraciones valores de posición y
velocidad por varias vías para la supervisión del eje. Adicionalmente se puede configurar una
supervisión de aceleración para una verificación de plausibilidad.
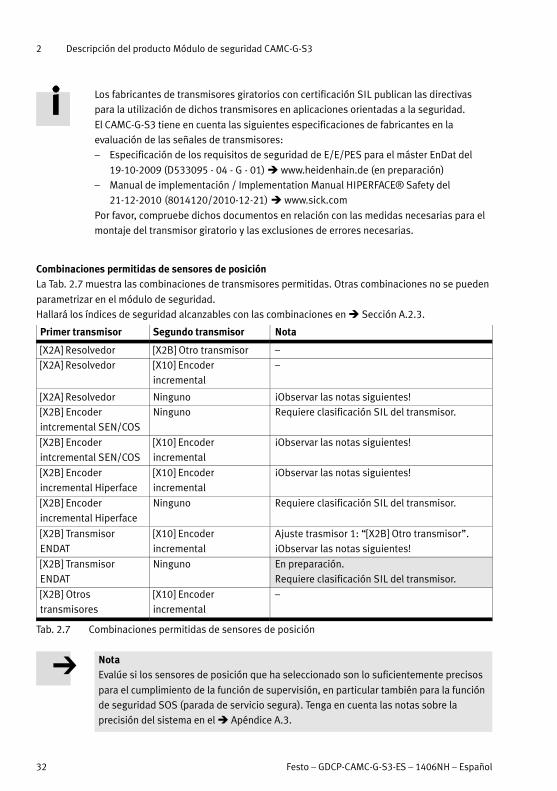
2 Descripción del producto Módulo de seguridad CAMC-G-S3
32 Festo – GDCP-CAMC-G-S3-ES – 1406NH – Español
Los fabricantes de transmisores giratorios con certificación SIL publican las directivas
para la utilización de dichos transmisores en aplicaciones orientadas a la seguridad.
El CAMC-G-S3 tiene en cuenta las siguientes especificaciones de fabricantes en la
evaluación de las señales de transmisores:
– Especificación de los requisitos de seguridad de E/E/PES para el máster EnDat del
19-10-2009 (D533095 - 04 - G - 01) � www.heidenhain.de (en preparación)
– Manual de implementación / Implementation Manual HIPERFACE® Safety del
21-12-2010 (8014120/2010-12-21) � www.sick.com
Por favor, compruebe dichos documentos en relación con las medidas necesarias para el
montaje del transmisor giratorio y las exclusiones de errores necesarias.
Combinaciones permitidas de sensores de posiciónLa Tab. 2.7 muestra las combinaciones de transmisores permitidas. Otras combinaciones no se pueden
parametrizar en el módulo de seguridad.
Hallará los índices de seguridad alcanzables con las combinaciones en � Sección A.2.3.
Primer transmisor Segundo transmisor Nota
[X2A] Resolvedor [X2B] Otro transmisor –
[X2A] Resolvedor [X10] Encoder
incremental
–
[X2A] Resolvedor Ninguno ¡Observar las notas siguientes!
[X2B] Encoder
intcremental SEN/COS
Ninguno Requiere clasificación SIL del transmisor.
[X2B] Encoder
intcremental SEN/COS
[X10] Encoder
incremental
¡Observar las notas siguientes!
[X2B] Encoder
incremental Hiperface
[X10] Encoder
incremental
¡Observar las notas siguientes!
[X2B] Encoder
incremental Hiperface
Ninguno Requiere clasificación SIL del transmisor.
[X2B] Transmisor
ENDAT
[X10] Encoder
incremental
Ajuste trasmisor 1: “[X2B] Otro transmisor”.
¡Observar las notas siguientes!
[X2B] Transmisor
ENDAT
Ninguno En preparación.
Requiere clasificación SIL del transmisor.
[X2B] Otros
transmisores
[X10] Encoder
incremental
–
Tab. 2.7 Combinaciones permitidas de sensores de posición
NotaEvalúe si los sensores de posición que ha seleccionado son lo suficientemente precisos
para el cumplimiento de la función de supervisión, en particular también para la función
de seguridad SOS (parada de servicio segura). Tenga en cuenta las notas sobre la
precisión del sistema en el � Apéndice A.3.
2 Descripción del producto Módulo de seguridad CAMC-G-S3
Festo – GDCP-CAMC-G-S3-ES – 1406NH – Español 33
NotaEn aplicaciones con un único transmisor giratorio / sensor de posición, este debe
poseer la clasificación SIL necesaria conforme a la evaluación de riesgos. En la mayoría
de los casos, la clasificación exige requerimientos adicionales o exclusiones de errores
en la mecánica. ¡Compruebe minuciosamente que la aplicación cumple dichos
requerimientos y que está permitido realizar las exclusiones de errores
correspondientes! En este contexto tenga en cuenta siempre las indicaciones de
implementación y las exclusiones de errores necesarias que requiere el fabricante del
sensor de posición.
NotaEn aplicaciones con un único transmisor giratorio / sensor de posición con interfaz
analógica de señales (resolvedor, SEN/COS, Hiperface,…) deben tenerse en cuenta las
restricciones relativas a la cobertura de diagnosis así como la limitación de la precisión
alcanzable de la supervisión de parada y de velocidad � Apéndice A.3.5 y A.3.6.
NotaSi se utilizan dos transmisores funcionales sin clasificación SIL, debe demostrarse por
separado la idoneidad de la combinación de transmisores para el empleo en sistemas
seguros hasta SIL3 (son necesarias, p. ej. diversidad de los sistemas de transmisores
en relación con CCF, MTTFd, etc., idoneidad de los transmisores para las condiciones
ambientales y de funcionamiento, compatibilidad electromagnética, etc.).
Recomendación: Dado el caso, utilice los ejemplos de soluciones creados por el
fabricante con combinaciones definidas de ejes, motores y transmisores.
2.2.6 Intercambio de datos y control del controlador de motor
El módulo de seguridad puede acceder al paso final de potencia del controlador de motor a través de
señales de mando digitales. El controlador de motor señaliza su estado de funcionamiento por medio
de otras señales digitales. Además, a través de una interfaz interna de comunicación está conectado
con el microcontrolador de la unidad básica (� Sección 2.2.1, Fig. 2.2 Principio de funcionamiento del
módulo de seguridad).
El módulo de seguridad puede controlar al controlador de motor (“control de nivel
superior”). Controla lo siguiente:
– la desconexión del paso de salida de potencia,
– el acceso al control de freno,
– los valores nominales para la regulación,
– el acuse de recibo del error.
Las señales de mando digitales se utilizan como se indica a continuación:
a) Desconexión de la alimentación del excitador en el controlador de motor:
El paso de salida de potencia del controlador de motor se puede desconectar a través de dos
canales independientes.
2 Descripción del producto Módulo de seguridad CAMC-G-S3
34 Festo – GDCP-CAMC-G-S3-ES – 1406NH – Español
Uno de los canales controla la alimentación del conmutador superior y el otro controla la
alimentación del conmutador inferior. Los canales son controlados por el módulo de seguridad por
varias vías y se supervisan continuamente durante el funcionamiento mediante pulsos de prueba.
El control se realiza exclusivamente a través de la función de seguridad STO � Sección 2.5.1.
b) Acceso al control de freno (conexión [X6] ):
La desconexión del control de freno se realiza de manera redundante en el módulo de seguridad
mediante las correspondientes señales de mando a la unidad básica. El control de freno se supervisa
continuamente durante el funcionamiento mediante pulsos de prueba. Por tanto, la salida de freno
segura de la unidad básica se puede utilizar también para el control de unidades de bloqueo. El control
se realiza exclusivamente a través de la función de seguridad SBC � Sección 2.5.2.
Como contrapartida, un freno de sostenimiento se suelta solamente cuando la unidad básica
señaliza al módulo de seguridad, por medio de otra línea de mando, que habilitará el freno de
sostenimiento también de modo funcional. Este enlace permite el rearranque sencillo del eje
conforme a SBC.
En caso de errores del sistema en el módulo de seguridad, las conexiones de hardware
accionadas dinámicamente se encargan de desconectar las líneas de mando para la
alimentación del excitador y para el control de freno de modo rápido y seguro.
c) Activación de una parada rápida en la unidad básica:
A través de una línea de mando interna el módulo de seguridad puede activar una parada rápida en
la unidad básica. El tiempo de respuesta de la unidad básica es especialmente breve (< 2 ms).
Cuando se activa la señal, en los modos de funcionamiento de regulación de la velocidad y de
posicionamiento la unidad básica frena en la rampa Quick Stop hasta la velocidad cero, a
continuación la velocidad de giro se regula hasta 0 rpm o la posición se regula a la posición actual
dependiendo del modo de funcionamiento.
Esta función se utiliza para poner en práctica la función de seguridad SS1 o SS2 tipo b)
� Secciones 2.5.3 y 2.5.4.
La interfaz interna de comunicación entre el módulo de seguridad y la unidad básica se utiliza para las
siguientes tareas:
– Establecer la conexión de comunicación hacia fuera entre el módulo de seguridad y el PC para
parametrización y diagnosis.
– Otras intervenciones activas del módulo de seguridad en el control del controlador de motor.
– Cambio de mensajes de estado y estados de funcionamiento.
– Suministro de informaciones de depuración para la búsquda de errores / análisis.
– Transmisión bidireccional de telegramas de datos seguros a controles de seguridad externos (en
preparación).
d) Interfaz para la parametrización:
La parametrización del módulo de seguridad se realiza mediante el SafetyTool (� Secciones 2.2.7 y 4.5).
Se accede al SafetyTool a través del Festo Configuration Tool (FCT). La comunicación segura entre el
Safety Tool y el módulo de seguridad tiene lugar por medio de una de las interfaces del controlador
de motor (Ethernet [X18] o USB [X19]). El controlador de motor transmite los telegramas de datos
desde y hacia el módulo de seguridad sin modificarlos.
2 Descripción del producto Módulo de seguridad CAMC-G-S3
Festo – GDCP-CAMC-G-S3-ES – 1406NH – Español 35
e) Limitación activa de las revoluciones / velocidad en la unidad básica:
El módulo de seguridad puede acceder directamente a la regulación del accionamiento a través de
la conexión interna de comunicación; para ello limita el valor nominal de velocidad activamente en
la unidad básica. La unidad básica se frena en la rampa parametrizada en el módulo de seguridad.
La limitación es efectiva en los siguientes modos de funcionamiento de la unidad básica:
– revoluciones / regulación de la velocidad
– posicionamiento (funcionamiento directo o de registro)
Esta función se utiliza para poner en práctica la función de seguridad SS1 o SS2 tipo a)
� Secciones 2.5.3 y 2.5.4. También es conveniente utilizarla en combinación con
funciones seguras de velocidad, como p. ej. SLS (velocidad con limitación segura), puesto
que el eje puede frenar de modo autónomo, incluso sin intervención del control.
Si en el módulo de seguridad hay varias funciones de seguridad activas simultáneamente que
prescriben distintas limitaciones de velocidad, se obtiene el mínimo de los valores límites de todas
las funciones de seguridad y se envía a la unidad básica.
En todos los modos de funcionamiento de interpolación en los que la unidad básica es guiada
directamente por medio del control, la limitación activa de las revoluciones no tiene sentido.
f ) Mensajes de estado:
El estado de funcionamiento del módulo de seguridad y el estado de las funciones de seguridad
(p. ej. Safety Function Requested (SFR), Safe State Reached (SSR)) se transmiten cíclicamente a la
unidad básica a través de la interfaz interna de comunicación.
La unidad básica puede
– emitir y visualizar dicho estado a través de las salidas digitales,
– enviar dicho estado a la unidad de control de nivel superior a través de la interfaz del bus de
campo activa respectivamente,
– emitir dicho estado mediante el visualizador digital de 7 segmentos.
Hallará la descripción de los mensajes de estado disponibles en � Sección 2.10.
Las informaciones de estado que están disponibles a través de los protocolos de
comunicación FHPP y CiA 402 figuran en � Sección A.4.
g) Análisis de errores / Depuración (Debugging):
A través de la interfaz de comunicación, la unidad básica recibe también el estado de error del
módulo de seguridad y tiene acceso a magnitudes de estado internas, tales como la velocidad
segura medida o los límites de supervisión para la velocidad.
La unidad básica utiliza estos datos:
– para la indicación, en el visualizador digital de 7 segmentos, del estado de funcionamiento y de
los mensajes de error que pueda haber,
– para el registro de todos los mensajes en una memoria de diagnosis no volátil para la posterior
diagnosis,
– para el análisis de las magnitudes de estado del módulo de seguridad a través de la función de
osciloscopio (Trace). Por ejemplo, mediante el registro del límite de velocidad supervisado y de
la velocidad actual se puede comprobar porqué el módulo de seguridad detecta la vulneración
de una condición de seguridad.
2 Descripción del producto Módulo de seguridad CAMC-G-S3
36 Festo – GDCP-CAMC-G-S3-ES – 1406NH – Español
2.2.7 Configurar las funciones de seguridad con el SafetyToolEn oposición a un mando de seguridad, el módulo de seguridad no se puede programar libremente.
Posee un volumen de funciones definido que puede ser activado y parametrizado por el usuario. No
obstante, para adaptar las funciones en el módulo de seguridad de modo flexible a las distintas
aplicaciones, las funciones de seguridad y las salidas disponen de una parte lógica configurable para
determinar las condiciones de conmutación.
La selección de las funciones de seguridad, la ocupación de las I/Os y la demanda de las funciones de
seguridad a través de entradas y otras condiciones se configuran mediante el SafetyTool.
El SafetyTool es un módulo de software para la puesta a punto segura del módulo de seguridad, que se
arranca desde el plugin de FCT CMMP-AS.
Por medio de la parametrización se establecen, entre otros, los siguientes ajustes:
– Las entradas se activan al asignarles una función, como p. ej. un tipo de sensor � Ejemplo en
sección 4.6.7.
– Las funciones de seguridad individuales se activan y parametrizan, p. ej., mediante la especificación
de velocidades límite, etc.
– La demanda de una función de seguridad se parametriza como operación lógica, p. ej., por medio
de la demanda a través de una entrada � Ejemplo en sección 4.6.8.
– Para el aviso de una función de seguridad activa se puede enlazar el estado interno, p. ej., con una
salida.
– El comportamiento en caso de error (la reacción ante un error) se puede configurar
La descripción del procedimiento para la parametrización del módulo de seguridad con el
SafetyTool figura en � Sección 4.5.
Importante:
El SafetyTool admite la adquisición automática de datos desde la unidad básica. Los
encoders, reductores, constantes de avance, etc. se configuran una única vez en el marco
de la puesta a punto de la unidad básica. Después de la puesta a punto de la unidad
básica, dichos datos son leídos por SafetyTool y transmitidos al módulo de seguridad
mediante diálogos.
– Parametrice en el primer paso la unidad básica por completo y optimice la aplicación
de modo funcional.
– En el segundo paso parametrice la ingeniería de seguridad.
NotaFunciones de seguridad en la fase de puesta a punto.
Puesto que ya en la fase de puesta a punto de una instalación se requieren medidas
para garantizar la seguridad funcional necesaria, se debe tener en cuenta lo siguiente:
� El módulo de seguridad debe estar configurado completamente y la aplicación debe
validarse por completo antes de que ofrezca una protección
2 Descripción del producto Módulo de seguridad CAMC-G-S3
Festo – GDCP-CAMC-G-S3-ES – 1406NH – Español 37
El módulo de seguridad se suministra “preconfigurado” de fábrica � Sección 4.4.1.
– A través de DIN40 se solicitan las funciones de seguridad STO y SBC.
– Por medio de DIN49 tiene lugar el rearranque.
– Mediante DIN48 se realiza el acuse de recibo del error.
El estado de entrega también se puede detectar sin FCT / SafetyTool en el LED
intermitente verde-rojo del módulo de seguridad (cuando DIN40 ha sido conectado y no
se ha solicitado ninguna función de seguridad � Sección 2.10).
2.3 Adquisición de datos desde el controlador de motor
Para la monitorización segura de movimientos, el módulo de seguridad debe saber qué sensores están
conectados para la detección de posición, qué resolución poseen y qué tipo de mecánica, avance,
reductor, etc. se utiliza y en qué unidades parametrizará el usuario la aplicación. El SafetyTool le asiste
mediante la adquisición guiada por menús de todos estos datos desde la unidad básica, de modo que
se simplifica la parametrización y se evitan entradas incorrectas.
Para la creación de proyectos nuevos, lo mejor es proceder de la siguiente manera:
Utilice un módulo de seguridad que se encuentre en el estado de entrega o restablézcalo
con los ajustes de fábrica � Sección 4.4.2 o 4.4.1.
Parametrice primero la unidad básica por completo mediante FCT y a continuación (si es
posible) póngala en funcionamiento.
Solo después, debe iniciar la parametrización por medio de SafetyTool y transferir
automáticamente los datos ajustados desde la unidad básica al SafetyTool mediante los
botones “Copy” � Secciones 4.5.1 y 4.6.2.
NotaUna adquisición de datos desde la unidad básica también es necesaria cuando se desea
utilizar un módulo de seguridad que ya se estaba utilizando en otra aplicación con otra
mecánica, o cuando se ha restablecido un módulo de seguridad manualmente a los
ajustes de fábrica.
En este caso, la configuración de la unidad básica también es la “guía”; los datos
correspondientes para las unidades de visualización, la mecánica y la configuración de
transmisores se tienen que tomar desde la unidad básica.
Si en el módulo de seguridad ya existen funciones de movimiento seguras
parametrizadas, los valores límite ajustados en el módulo de seguridad se transmiten al
SafetyTool como valores nominales. Estos se deben transmitir de nuevo al módulo de
seguridad para que los valores límite permanezcan sin modificar.
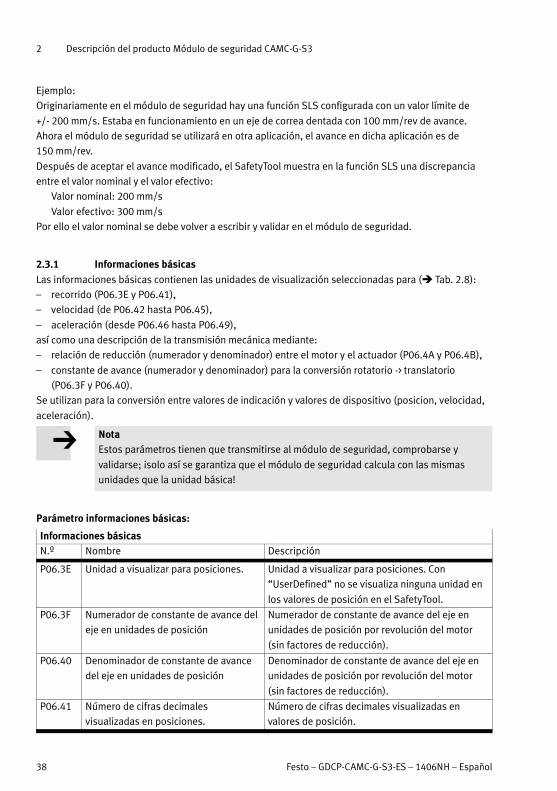
2 Descripción del producto Módulo de seguridad CAMC-G-S3
38 Festo – GDCP-CAMC-G-S3-ES – 1406NH – Español
Ejemplo:
Originariamente en el módulo de seguridad hay una función SLS configurada con un valor límite de
+/- 200 mm/s. Estaba en funcionamiento en un eje de correa dentada con 100 mm/rev de avance.
Ahora el módulo de seguridad se utilizará en otra aplicación, el avance en dicha aplicación es de
150 mm/rev.
Después de aceptar el avance modificado, el SafetyTool muestra en la función SLS una discrepancia
entre el valor nominal y el valor efectivo:
Valor nominal: 200 mm/s
Valor efectivo: 300 mm/s
Por ello el valor nominal se debe volver a escribir y validar en el módulo de seguridad.
2.3.1 Informaciones básicas
Las informaciones básicas contienen las unidades de visualización seleccionadas para (� Tab. 2.8):
– recorrido (P06.3E y P06.41),
– velocidad (de P06.42 hasta P06.45),
– aceleración (desde P06.46 hasta P06.49),
así como una descripción de la transmisión mecánica mediante:
– relación de reducción (numerador y denominador) entre el motor y el actuador (P06.4A y P06.4B),
– constante de avance (numerador y denominador) para la conversión rotatorio -> translatorio
(P06.3F y P06.40).
Se utilizan para la conversión entre valores de indicación y valores de dispositivo (posicion, velocidad,
aceleración).
NotaEstos parámetros tienen que transmitirse al módulo de seguridad, comprobarse y
validarse; ¡solo así se garantiza que el módulo de seguridad calcula con las mismas
unidades que la unidad básica!
Parámetro informaciones básicas:
Informaciones básicasN.º Nombre Descripción
P06.3E Unidad a visualizar para posiciones. Unidad a visualizar para posiciones. Con
“UserDefined” no se visualiza ninguna unidad en
los valores de posición en el SafetyTool.
P06.3F Numerador de constante de avance del
eje en unidades de posición
Numerador de constante de avance del eje en
unidades de posición por revolución del motor
(sin factores de reducción).
P06.40 Denominador de constante de avance
del eje en unidades de posición
Denominador de constante de avance del eje en
unidades de posición por revolución del motor
(sin factores de reducción).
P06.41 Número de cifras decimales
visualizadas en posiciones.
Número de cifras decimales visualizadas en
valores de posición.
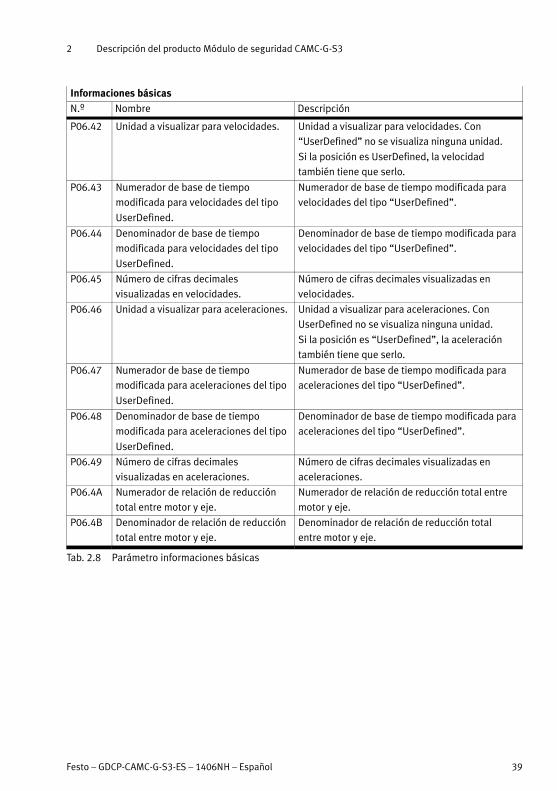
2 Descripción del producto Módulo de seguridad CAMC-G-S3
Festo – GDCP-CAMC-G-S3-ES – 1406NH – Español 39
Informaciones básicas
N.º DescripciónNombre
P06.42 Unidad a visualizar para velocidades. Unidad a visualizar para velocidades. Con
“UserDefined” no se visualiza ninguna unidad.
Si la posición es UserDefined, la velocidad
también tiene que serlo.
P06.43 Numerador de base de tiempo
modificada para velocidades del tipo
UserDefined.
Numerador de base de tiempo modificada para
velocidades del tipo “UserDefined”.
P06.44 Denominador de base de tiempo
modificada para velocidades del tipo
UserDefined.
Denominador de base de tiempo modificada para
velocidades del tipo “UserDefined”.
P06.45 Número de cifras decimales
visualizadas en velocidades.
Número de cifras decimales visualizadas en
velocidades.
P06.46 Unidad a visualizar para aceleraciones. Unidad a visualizar para aceleraciones. Con
UserDefined no se visualiza ninguna unidad.
Si la posición es “UserDefined”, la aceleración
también tiene que serlo.
P06.47 Numerador de base de tiempo
modificada para aceleraciones del tipo
UserDefined.
Numerador de base de tiempo modificada para
aceleraciones del tipo “UserDefined”.
P06.48 Denominador de base de tiempo
modificada para aceleraciones del tipo
UserDefined.
Denominador de base de tiempo modificada para
aceleraciones del tipo “UserDefined”.
P06.49 Número de cifras decimales
visualizadas en aceleraciones.
Número de cifras decimales visualizadas en
aceleraciones.
P06.4A Numerador de relación de reducción
total entre motor y eje.
Numerador de relación de reducción total entre
motor y eje.
P06.4B Denominador de relación de reducción
total entre motor y eje.
Denominador de relación de reducción total
entre motor y eje.
Tab. 2.8 Parámetro informaciones básicas
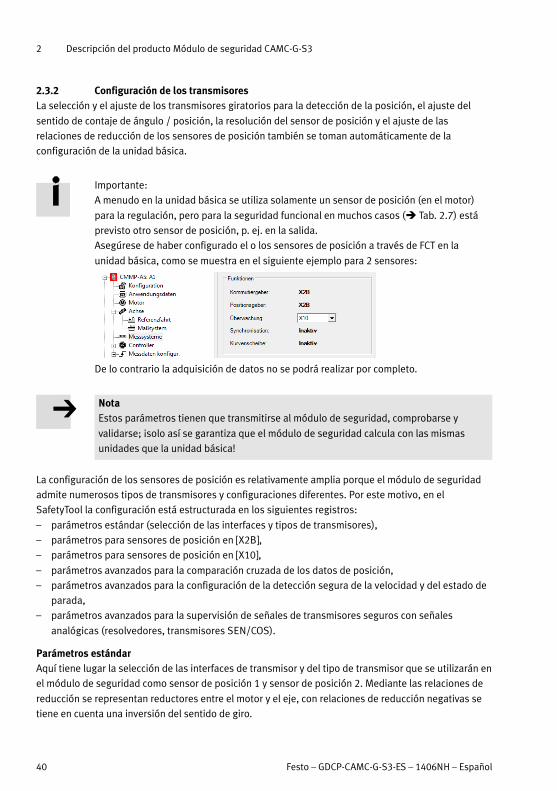
2 Descripción del producto Módulo de seguridad CAMC-G-S3
40 Festo – GDCP-CAMC-G-S3-ES – 1406NH – Español
2.3.2 Configuración de los transmisoresLa selección y el ajuste de los transmisores giratorios para la detección de la posición, el ajuste del
sentido de contaje de ángulo / posición, la resolución del sensor de posición y el ajuste de las
relaciones de reducción de los sensores de posición también se toman automáticamente de la
configuración de la unidad básica.
Importante:
A menudo en la unidad básica se utiliza solamente un sensor de posición (en el motor)
para la regulación, pero para la seguridad funcional en muchos casos (� Tab. 2.7) está
previsto otro sensor de posición, p. ej. en la salida.
Asegúrese de haber configurado el o los sensores de posición a través de FCT en la
unidad básica, como se muestra en el siguiente ejemplo para 2 sensores:
De lo contrario la adquisición de datos no se podrá realizar por completo.
NotaEstos parámetros tienen que transmitirse al módulo de seguridad, comprobarse y
validarse; ¡solo así se garantiza que el módulo de seguridad calcula con las mismas
unidades que la unidad básica!
La configuración de los sensores de posición es relativamente amplia porque el módulo de seguridad
admite numerosos tipos de transmisores y configuraciones diferentes. Por este motivo, en el
SafetyTool la configuración está estructurada en los siguientes registros:
– parámetros estándar (selección de las interfaces y tipos de transmisores),
– parámetros para sensores de posición en [X2B],
– parámetros para sensores de posición en [X10],
– parámetros avanzados para la comparación cruzada de los datos de posición,
– parámetros avanzados para la configuración de la detección segura de la velocidad y del estado de
parada,
– parámetros avanzados para la supervisión de señales de transmisores seguros con señales
analógicas (resolvedores, transmisores SEN/COS).
Parámetros estándarAquí tiene lugar la selección de las interfaces de transmisor y del tipo de transmisor que se utilizarán en
el módulo de seguridad como sensor de posición 1 y sensor de posición 2. Mediante las relaciones de
reducción se representan reductores entre el motor y el eje, con relaciones de reducción negativas se
tiene en cuenta una inversión del sentido de giro.
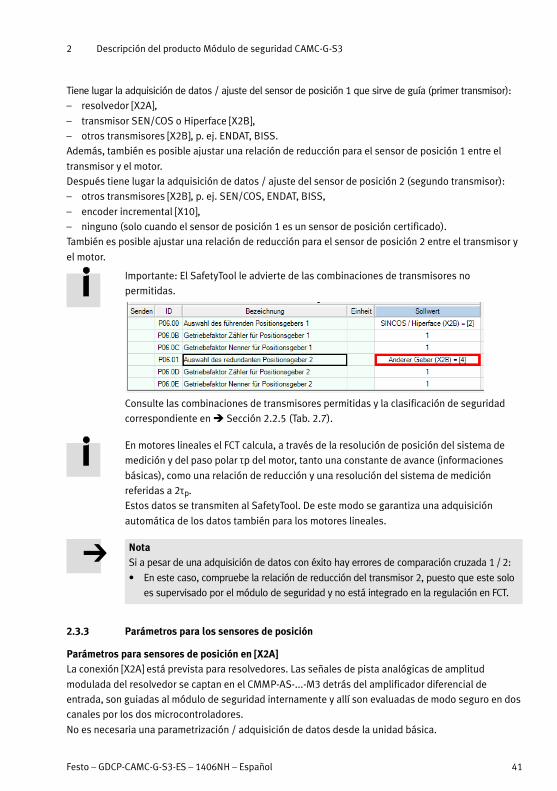
2 Descripción del producto Módulo de seguridad CAMC-G-S3
Festo – GDCP-CAMC-G-S3-ES – 1406NH – Español 41
Tiene lugar la adquisición de datos / ajuste del sensor de posición 1 que sirve de guía (primer transmisor):
– resolvedor [X2A],
– transmisor SEN/COS o Hiperface [X2B],
– otros transmisores [X2B], p. ej. ENDAT, BISS.
Además, también es posible ajustar una relación de reducción para el sensor de posición 1 entre el
transmisor y el motor.
Después tiene lugar la adquisición de datos / ajuste del sensor de posición 2 (segundo transmisor):
– otros transmisores [X2B], p. ej. SEN/COS, ENDAT, BISS,
– encoder incremental [X10],
– ninguno (solo cuando el sensor de posición 1 es un sensor de posición certificado).
También es posible ajustar una relación de reducción para el sensor de posición 2 entre el transmisor y
el motor.
Importante: El SafetyTool le advierte de las combinaciones de transmisores no
permitidas.
Consulte las combinaciones de transmisores permitidas y la clasificación de seguridad
correspondiente en � Sección 2.2.5 (Tab. 2.7).
En motores lineales el FCT calcula, a través de la resolución de posición del sistema de
medición y del paso polar ôp del motor, tanto una constante de avance (informaciones
básicas), como una relación de reducción y una resolución del sistema de medición
referidas a 2ôp.
Estos datos se transmiten al SafetyTool. De este modo se garantiza una adquisición
automática de los datos también para los motores lineales.
NotaSi a pesar de una adquisición de datos con éxito hay errores de comparación cruzada 1 / 2:
� En este caso, compruebe la relación de reducción del transmisor 2, puesto que este solo
es supervisado por el módulo de seguridad y no está integrado en la regulación en FCT.
2.3.3 Parámetros para los sensores de posición
Parámetros para sensores de posición en [X2A]La conexión [X2A] está prevista para resolvedores. Las señales de pista analógicas de amplitud
modulada del resolvedor se captan en el CMMPAS...M3 detrás del amplificador diferencial de
entrada, son guiadas al módulo de seguridad internamente y allí son evaluadas de modo seguro en dos
canales por los dos microcontroladores.
No es necesaria una parametrización / adquisición de datos desde la unidad básica.
2 Descripción del producto Módulo de seguridad CAMC-G-S3
42 Festo – GDCP-CAMC-G-S3-ES – 1406NH – Español
Parámetros para sensores de posición en [X2B]La conexión [X2B] está prevista para transmisores con señales de pista analógicas, tales como:– transmisores incrementales con señales de pista SEN/CON,– Transmisores Hiperface con señales de pista SEN/COS.Las señales de pista de transmisores SEN/COS y de transmisores Hiperface se captan en elCMMPAS...M3 detrás del amplificador diferencial de entrada, son guiadas al módulo de seguridadinternamente y allí son evaluadas de modo seguro y a través de dos canales por los dosmicrocontroladores. Este es el caso siempre que en la pestaña de parámetros estándar se haseleccionado “Transmisor SIN/COS / Hiperface (X2B) = [2]”.Durante la adquisición de datos / parametrización se ajusta el número de pasos angulares de contajedigitales (equivale a 4 x número de pulsos por cada revolución del motor o en caso de motores linealespor cada 2ôp).
NotaEn caso de un eje en parada, los transmisores SEN/COS suministran señales estáticas. Si no
se utiliza un segundo transductor angular no se pueden detectar los fallos “stuck-at”
(“Bloqueo del valor debido a modificación mínima o inexistente de la señal de salida”). Por
ello, el eje debe moverse regularmente al solicitar funciones de seguridad.
Si se utiliza un transmisor SIN/COS o Hiperface como único transmisor, tras 24 h de
parada con función de seguridad solicitada se genera el error 55-2.
Si se solicita la función de seguridad SS2 / SOS continuamente durante más de
24 horas, se genera el error 54-7.
NotaEn aplicaciones con un único transmisor giratorio / sensor de posición con interfaz
analógica de señales (resolvedor, SEN/COS, Hiperface,…) deben tenerse en cuenta las
restricciones relativas a la cobertura de diagnosis así como la limitación de la precisión
alcanzable de la supervisión de parada y de velocidad � Apéndice A.3.5 y A.3.6.
La conexión [X2B] también está prevista para transmisores con interfaz digital, tales como– encoders incrementales con señales de onda rectangular A/B/N,– transmisores ENDAT-2.1 y 2.2 con interfaz digital,– transmisores seriales con interfaz digital, p. ej. BISS.Dichos transmisores no se evalúan en la unidad básica CMMP-AS-...-M3 de modo orientado a la seguridad.A través de la interfaz interna de datos el módulo de seguridad interroga cíclicamente una informaciónangular digital normalizada de la unidad básica. Este es el caso siempre que en la pestaña deparámetros estándar se ha seleccionado “Otro transmisor (X2B) = [4]”.La información angular de cualquier transmisor conectado en X2B al controlador de motor se puedeutilizar como canal de la detección angular segura de dos canales.Es posible parametrizar un tiempo tolerado de error cuando el módulo de seguridad detecta telegramas dedatos con perturbaciones. El valor predeterminado de 1 ms no debería modificarse sin motivo fundado,puesto que el valor actúa como un filtro adicional al tiempo de respuesta del módulo de seguridad.
NotaEl uso de transmisores con transmisión de datos puramente digital en sistemas seguros
solo está permitido en combinación con un segundo transmisor, p. ej. en [X10].
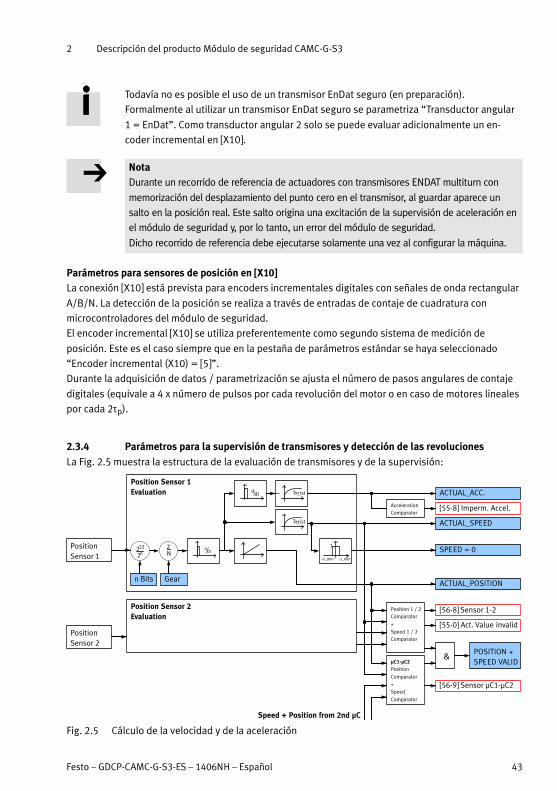
2 Descripción del producto Módulo de seguridad CAMC-G-S3
Festo – GDCP-CAMC-G-S3-ES – 1406NH – Español 43
Todavía no es posible el uso de un transmisor EnDat seguro (en preparación).
Formalmente al utilizar un transmisor EnDat seguro se parametriza “Transductor angular
1 = EnDat”. Como transductor angular 2 solo se puede evaluar adicionalmente un en
coder incremental en [X10].
NotaDurante un recorrido de referencia de actuadores con transmisores ENDAT multiturn con
memorización del desplazamiento del punto cero en el transmisor, al guardar aparece un
salto en la posición real. Este salto origina una excitación de la supervisión de aceleración en
el módulo de seguridad y, por lo tanto, un error del módulo de seguridad.
Dicho recorrido de referencia debe ejecutarse solamente una vez al configurar la máquina.
Parámetros para sensores de posición en [X10]La conexión [X10] está prevista para encoders incrementales digitales con señales de onda rectangular
A/B/N. La detección de la posición se realiza a través de entradas de contaje de cuadratura con
microcontroladores del módulo de seguridad.
El encoder incremental [X10] se utiliza preferentemente como segundo sistema de medición de
posición. Este es el caso siempre que en la pestaña de parámetros estándar se haya seleccionado
“Encoder incremental (X10) = [5]”.
Durante la adquisición de datos / parametrización se ajusta el número de pasos angulares de contaje
digitales (equivale a 4 x número de pulsos por cada revolución del motor o en caso de motores lineales
por cada 2ôp).
2.3.4 Parámetros para la supervisión de transmisores y detección de las revoluciones
La Fig. 2.5 muestra la estructura de la evaluación de transmisores y de la supervisión:
μC1-μC2Position
Comparator
+ Speed
Comparator
[56-8] Sensor 1-2
[55-0] Act. Value invalid
ACTUAL_ACC.
[55-8] Imperm. Accel.
ACTUAL_SPEED
SPEED = 0
ACTUAL_POSITION
POSITION +SPEED VALID
&
[56-9] Sensor μC1-μC2
Position 1 / 2Comparator
+
Speed 1 / 2Comparator
Acceleration Comparator
PositionSensor 1
PositionSensor 2
d/dt
T +n_ist
d/dt T +n_ist
ZN
232
2n
1
n_min-n_min
Position Sensor 1Evaluation
Position Sensor 2Evaluation
Gearn Bits
Speed + Position from 2nd μC
Fig. 2.5 Cálculo de la velocidad y de la aceleración
2 Descripción del producto Módulo de seguridad CAMC-G-S3
44 Festo – GDCP-CAMC-G-S3-ES – 1406NH – Español
Término/abreviación Explicación
Position Sensor 1/2 Evaluación de sensor de posición 1/2
Evaluation Evaluación
Gear Engranaje
Acceleration Comparator Comparación de aceleración 1/2
Position 1/2 Comparator +
Speed 1/2 Comparator
Compararción de posición 1/2 y
comparación de velocidad 1/2
ACTUAL_ACC. Señal interna: Aceleración real
ACTUAL_SPEED Señal interna: Velocidad real
SPEED = 0 Señal interna: Velocidad = 0
ACTUAL_POSITION Señal interna: Posición real
POSITION + SPEED VALID Señal interna: Posición y velocidad válidas
[5x-x] xxx_ERR Señal de error interna error 5x-x
Tab. 2.9 Leyenda de la Fig. 2.5
Descripción:– El bloque “Position Sensor Evaluation” (evaluación de sensor de posición) existe dos veces en cada
microcontrolador, separado para sensor de posición 1 y sensor de posición 2.
– La información de posición de transmisor 1 y transmisor 2 se normaliza en primer lugar a 2³².
Entonces se tiene en cuenta también una relación de reducción, a través de la cual se puede
representar una inversión del sentido de contaje.
– Así, el bloque suministra una posición normalizada y calcula a partir de ella la velocidad actual, así
como la aceleración.
– Para la supervisión de las magnitudes de estado se recurre a los datos del sensor de posición 1.
– La aceleración se supervisa y se comprueba la plausibilidad; parametrizables.
– Cada microcontrolador ejecuta una comparación continua de los valores de posición y los valores
de velocidad del sensor 1 con los del sensor 2.
– Las tolerancias para dicha comparación de sensores son parametrizables.
– Adicionalmente cada microcontrolador compara, en una comparación cruzada, los datos propios de
posición y velocidad con los del otro microcontrolador; los valores límites para ello también son
parametrizables.
– El microcontrolador genera diferentes mensajes de error cuando se determinan desviaciones o
vulneraciones de los valores límite.
NotaLos ajustes de fábrica de los parámetros para la evaluación de transmisores está
adaptado a la resolución del sensor de posición y a la electrónica de evaluación del
módulo de seguridad.
Solo deberían modificarse en casos fundados, porque influyen en el tiempo de
respuesta del módulo de seguridad durante la detección de movimientos peligrosos o
en la detección de errores. Son los denominados “parámetros avanzados”.
2 Descripción del producto Módulo de seguridad CAMC-G-S3
Festo – GDCP-CAMC-G-S3-ES – 1406NH – Español 45
Parámetros avanzados para la configuración de la detección segura de la velocidad y del estado deparada
Los dos microcontroladores calculan la velocidad y la aceleración seguras a partir de los datos de
posición captados. Están disponibles los siguientes parámetros para la detección de las revoluciones y
para la detección del estado de parada:
– La supervisión de la aceleración sirve para el control de plausibilidad de la detección de posición.
Se parametriza una aceleración que, con seguridad, el motor no alcanzará a causa de su forma
constructiva. Si la rampa de revoluciones sobrepasa un límite definido por la aceleración máxima,
entonces se produce un error 55-8 � Sección 5.6.
– El filtro para la detección de revoluciones/velocidad reduce el ruido en la señal de velocidad, en
particular cuando se utilizan transmisores con señales analógicas o con resolución gruesa.
– El valor umbral y el tiempo de filtrado para la detección del estado de parada. La detección de
parada se utiliza, p. ej., para la función de seguridad SOS.
Parámetros avanzados para la comparación cruzada de los datos de posiciónEste registro contiene parámetros para la verificación de plausibilidad de los datos de posición y de
velocidad.
– El margen de tolerancia y el tiempo tolerado para la comparación de los datos de posición del
sensor 1 / sensor 2 por el microcontrolador correspondiente en el módulo de seguridad.
– El margen de tolerancia y el tiempo tolerado para la comparación de los datos de velocidad del
sensor 1 / sensor 2 por el microcontrolador correspondiente en el módulo de seguridad.
– El margen de tolerancia y el tiempo tolerado para la comparación cruzada de los datos de posición
entre el microcontrolador 1 y el microcontrolador 2 en el módulo de seguridad.
– El margen de tolerancia para la comparación cruzada de los datos de velocidad entre el
microcontrolador 1 y el microcontrolador 2 en el módulo de seguridad.
Si el módulo de seguridad detecta una desviación de los datos de posición o de velocidad, cuyo valor
excede el tiempo parametrizable, entonces se genera un error y los valores efectivos no son válidos.
Parámetros avanzados para la supervisión de señales de transmisores seguros con señalesanalógicasEste registro contiene parámetros para la supervisión de las señales de transmisor analógicas de
transmisores SEN/COS y resolvedores.
– La supervisión de amplitud y de longitud de vectores para las señales de resolvedor así como un
tiempo tolerado para la supervisión.
– Filtro observador parametrizable para la evaluación de resolvedor.
– La supervisión de amplitud y de longitud de vectores para la evaluación de transmisores Hiperface y
SEN/COS así como un tiempo tolerado para la supervisión.
Influencia de los parámetros para la configuración de transmisores en la respuesta en función del
tiempoAlgunos parámetros para la configuración de la detección segura de revoluciones influyen en el tiempo
de respuesta con el que se detectan modificaciones en el movimiento.
Tienen influencia los siguientes parámetros:
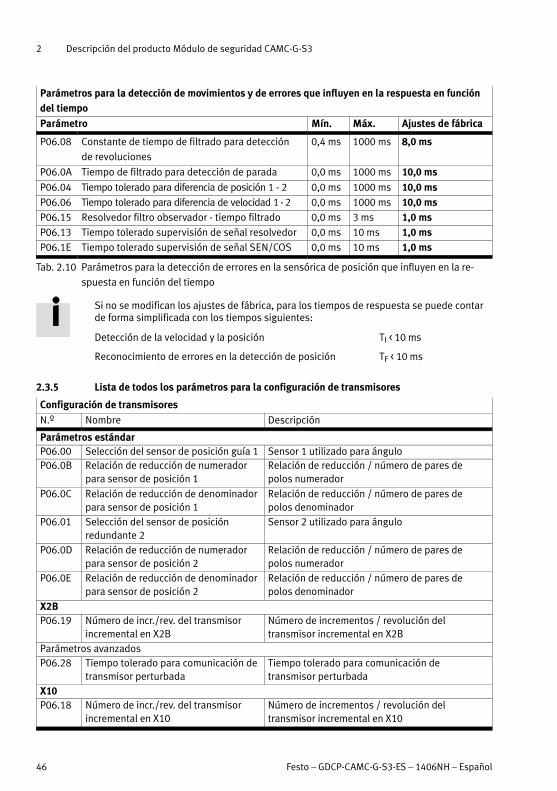
2 Descripción del producto Módulo de seguridad CAMC-G-S3
46 Festo – GDCP-CAMC-G-S3-ES – 1406NH – Español
Parámetros para la detección de movimientos y de errores que influyen en la respuesta en funcióndel tiempo
Parámetro Mín. Máx. Ajustes de fábrica
P06.08 Constante de tiempo de filtrado para detección
de revoluciones
0,4 ms 1000 ms 8,0 ms
P06.0A Tiempo de filtrado para detección de parada 0,0 ms 1000 ms 10,0 ms
P06.04 Tiempo tolerado para diferencia de posición 1 - 2 0,0 ms 1000 ms 10,0 msP06.06 Tiempo tolerado para diferencia de velocidad 1 - 2 0,0 ms 1000 ms 10,0 msP06.15 Resolvedor filtro observador - tiempo filtrado 0,0 ms 3 ms 1,0 msP06.13 Tiempo tolerado supervisión de señal resolvedor 0,0 ms 10 ms 1,0 msP06.1E Tiempo tolerado supervisión de señal SEN/COS 0,0 ms 10 ms 1,0 ms
Tab. 2.10 Parámetros para la detección de errores en la sensórica de posición que influyen en la re
spuesta en función del tiempo
Si no se modifican los ajustes de fábrica, para los tiempos de respuesta se puede contarde forma simplificada con los tiempos siguientes:
Detección de la velocidad y la posición TI < 10 ms
Reconocimiento de errores en la detección de posición TF < 10 ms
2.3.5 Lista de todos los parámetros para la configuración de transmisores
Configuración de transmisores
N.º Nombre Descripción
Parámetros estándarP06.00 Selección del sensor de posición guía 1 Sensor 1 utilizado para ánguloP06.0B Relación de reducción de numerador
para sensor de posición 1Relación de reducción / número de pares depolos numerador
P06.0C Relación de reducción de denominadorpara sensor de posición 1
Relación de reducción / número de pares depolos denominador
P06.01 Selección del sensor de posiciónredundante 2
Sensor 2 utilizado para ángulo
P06.0D Relación de reducción de numeradorpara sensor de posición 2
Relación de reducción / número de pares depolos numerador
P06.0E Relación de reducción de denominadorpara sensor de posición 2
Relación de reducción / número de pares depolos denominador
X2BP06.19 Número de incr./rev. del transmisor
incremental en X2BNúmero de incrementos / revolución deltransmisor incremental en X2B
Parámetros avanzadosP06.28 Tiempo tolerado para comunicación de
transmisor perturbadaTiempo tolerado para comunicación detransmisor perturbada
X10P06.18 Número de incr./rev. del transmisor
incremental en X10Número de incrementos / revolución deltransmisor incremental en X10
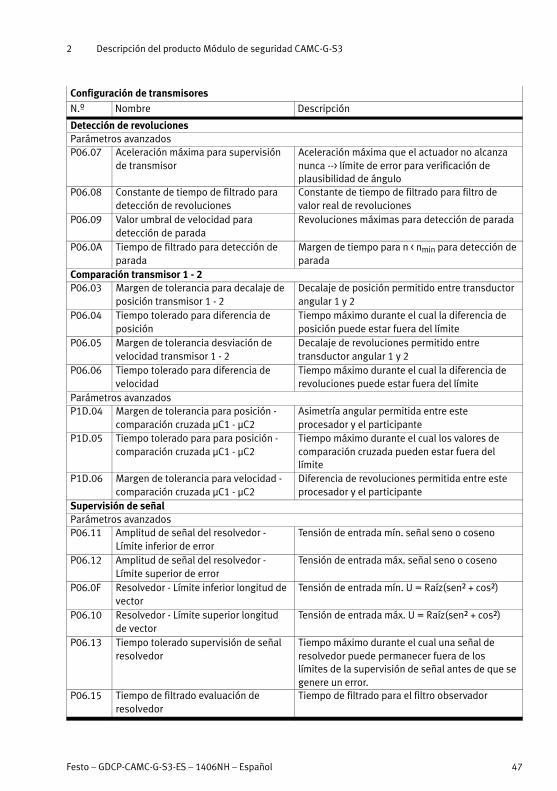
2 Descripción del producto Módulo de seguridad CAMC-G-S3
Festo – GDCP-CAMC-G-S3-ES – 1406NH – Español 47
Configuración de transmisores
N.º DescripciónNombre
Detección de revolucionesParámetros avanzadosP06.07 Aceleración máxima para supervisión
de transmisorAceleración máxima que el actuador no alcanzanunca --> límite de error para verificación deplausibilidad de ángulo
P06.08 Constante de tiempo de filtrado paradetección de revoluciones
Constante de tiempo de filtrado para filtro devalor real de revoluciones
P06.09 Valor umbral de velocidad paradetección de parada
Revoluciones máximas para detección de parada
P06.0A Tiempo de filtrado para detección deparada
Margen de tiempo para n < nmin para detección deparada
Comparación transmisor 1 - 2P06.03 Margen de tolerancia para decalaje de
posición transmisor 1 - 2Decalaje de posición permitido entre transductorangular 1 y 2
P06.04 Tiempo tolerado para diferencia deposición
Tiempo máximo durante el cual la diferencia deposición puede estar fuera del límite
P06.05 Margen de tolerancia desviación develocidad transmisor 1 - 2
Decalaje de revoluciones permitido entretransductor angular 1 y 2
P06.06 Tiempo tolerado para diferencia develocidad
Tiempo máximo durante el cual la diferencia derevoluciones puede estar fuera del límite
Parámetros avanzadosP1D.04 Margen de tolerancia para posición -
comparación cruzada μC1 - μC2Asimetría angular permitida entre esteprocesador y el participante
P1D.05 Tiempo tolerado para para posición -comparación cruzada μC1 - μC2
Tiempo máximo durante el cual los valores decomparación cruzada pueden estar fuera dellímite
P1D.06 Margen de tolerancia para velocidad -comparación cruzada μC1 - μC2
Diferencia de revoluciones permitida entre esteprocesador y el participante
Supervisión de señalParámetros avanzadosP06.11 Amplitud de señal del resolvedor -
Límite inferior de errorTensión de entrada mín. señal seno o coseno
P06.12 Amplitud de señal del resolvedor -Límite superior de error
Tensión de entrada máx. señal seno o coseno
P06.0F Resolvedor - Límite inferior longitud devector
Tensión de entrada mín. U = Raíz(sen² + cos²)
P06.10 Resolvedor - Límite superior longitudde vector
Tensión de entrada máx. U = Raíz(sen² + cos²)
P06.13 Tiempo tolerado supervisión de señalresolvedor
Tiempo máximo durante el cual una señal deresolvedor puede permanecer fuera de loslímites de la supervisión de señal antes de que segenere un error.
P06.15 Tiempo de filtrado evaluación deresolvedor
Tiempo de filtrado para el filtro observador
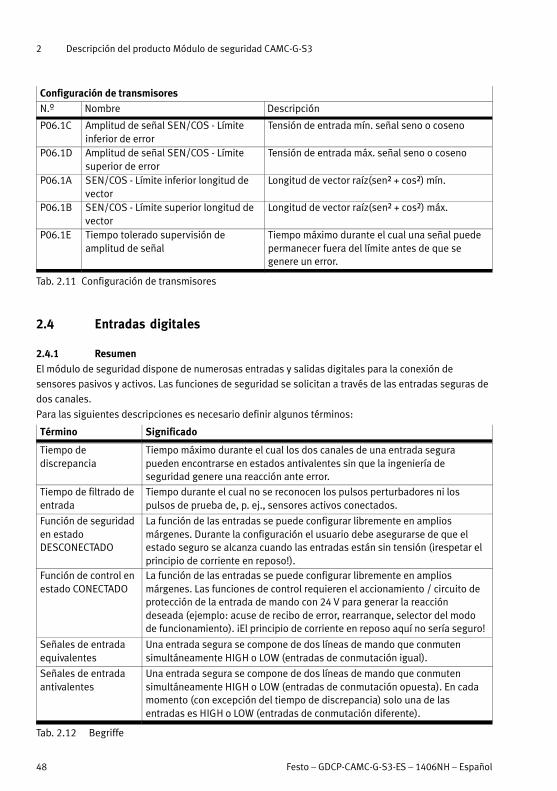
2 Descripción del producto Módulo de seguridad CAMC-G-S3
48 Festo – GDCP-CAMC-G-S3-ES – 1406NH – Español
Configuración de transmisores
N.º DescripciónNombre
P06.1C Amplitud de señal SEN/COS - Límiteinferior de error
Tensión de entrada mín. señal seno o coseno
P06.1D Amplitud de señal SEN/COS - Límitesuperior de error
Tensión de entrada máx. señal seno o coseno
P06.1A SEN/COS - Límite inferior longitud devector
Longitud de vector raíz(sen² + cos²) mín.
P06.1B SEN/COS - Límite superior longitud devector
Longitud de vector raíz(sen² + cos²) máx.
P06.1E Tiempo tolerado supervisión deamplitud de señal
Tiempo máximo durante el cual una señal puedepermanecer fuera del límite antes de que segenere un error.
Tab. 2.11 Configuración de transmisores
2.4 Entradas digitales
2.4.1 Resumen
El módulo de seguridad dispone de numerosas entradas y salidas digitales para la conexión de
sensores pasivos y activos. Las funciones de seguridad se solicitan a través de las entradas seguras de
dos canales.
Para las siguientes descripciones es necesario definir algunos términos:
Término Significado
Tiempo dediscrepancia
Tiempo máximo durante el cual los dos canales de una entrada segurapueden encontrarse en estados antivalentes sin que la ingeniería deseguridad genere una reacción ante error.
Tiempo de filtrado deentrada
Tiempo durante el cual no se reconocen los pulsos perturbadores ni lospulsos de prueba de, p. ej., sensores activos conectados.
Función de seguridaden estadoDESCONECTADO
La función de las entradas se puede configurar libremente en ampliosmárgenes. Durante la configuración el usuario debe asegurarse de que elestado seguro se alcanza cuando las entradas están sin tensión (¡respetar elprincipio de corriente en reposo!).
Función de control enestado CONECTADO
La función de las entradas se puede configurar libremente en ampliosmárgenes. Las funciones de control requieren el accionamiento / circuito deprotección de la entrada de mando con 24 V para generar la reaccióndeseada (ejemplo: acuse de recibo de error, rearranque, selector del modode funcionamiento). ¡El principio de corriente en reposo aquí no sería seguro!
Señales de entradaequivalentes
Una entrada segura se compone de dos líneas de mando que conmutensimultáneamente HIGH o LOW (entradas de conmutación igual).
Señales de entradaantivalentes
Una entrada segura se compone de dos líneas de mando que conmutensimultáneamente HIGH o LOW (entradas de conmutación opuesta). En cadamomento (con excepción del tiempo de discrepancia) solo una de lasentradas es HIGH o LOW (entradas de conmutación diferente).
Tab. 2.12 Begriffe
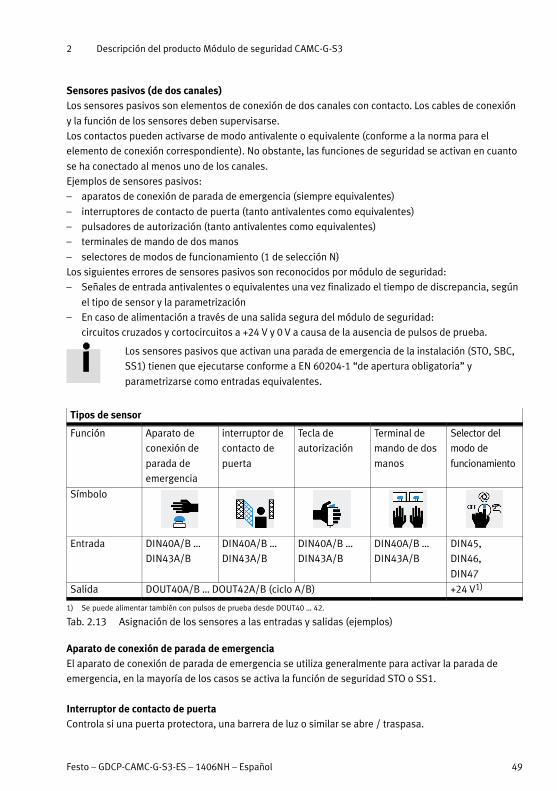
2 Descripción del producto Módulo de seguridad CAMC-G-S3
Festo – GDCP-CAMC-G-S3-ES – 1406NH – Español 49
Sensores pasivos (de dos canales)Los sensores pasivos son elementos de conexión de dos canales con contacto. Los cables de conexión
y la función de los sensores deben supervisarse.
Los contactos pueden activarse de modo antivalente o equivalente (conforme a la norma para el
elemento de conexión correspondiente). No obstante, las funciones de seguridad se activan en cuanto
se ha conectado al menos uno de los canales.
Ejemplos de sensores pasivos:
– aparatos de conexión de parada de emergencia (siempre equivalentes)
– interruptores de contacto de puerta (tanto antivalentes como equivalentes)
– pulsadores de autorización (tanto antivalentes como equivalentes)
– terminales de mando de dos manos
– selectores de modos de funcionamiento (1 de selección N)
Los siguientes errores de sensores pasivos son reconocidos por módulo de seguridad:
– Señales de entrada antivalentes o equivalentes una vez finalizado el tiempo de discrepancia, según
el tipo de sensor y la parametrización
– En caso de alimentación a través de una salida segura del módulo de seguridad:
circuitos cruzados y cortocircuitos a +24 V y 0 V a causa de la ausencia de pulsos de prueba.
Los sensores pasivos que activan una parada de emergencia de la instalación (STO, SBC,
SS1) tienen que ejecutarse conforme a EN 60204-1 “de apertura obligatoria” y
parametrizarse como entradas equivalentes.
Tipos de sensor
Función Aparato de
conexión de
parada de
emergencia
interruptor de
contacto de
puerta
Tecla de
autorización
Terminal de
mando de dos
manos
Selector del
modo de
funcionamiento
Símbolo
Entrada DIN40A/B …
DIN43A/B
DIN40A/B …
DIN43A/B
DIN40A/B …
DIN43A/B
DIN40A/B …
DIN43A/B
DIN45,
DIN46,
DIN47
Salida DOUT40A/B … DOUT42A/B (ciclo A/B) +24 V1)
1) Se puede alimentar también con pulsos de prueba desde DOUT40 … 42.
Tab. 2.13 Asignación de los sensores a las entradas y salidas (ejemplos)
Aparato de conexión de parada de emergenciaEl aparato de conexión de parada de emergencia se utiliza generalmente para activar la parada de
emergencia, en la mayoría de los casos se activa la función de seguridad STO o SS1.
Interruptor de contacto de puertaControla si una puerta protectora, una barrera de luz o similar se abre / traspasa.
2 Descripción del producto Módulo de seguridad CAMC-G-S3
50 Festo – GDCP-CAMC-G-S3-ES – 1406NH – Español
Pulsador de autorizaciónEl pulsador de autorización se utiliza en general durante la operación de ajuste.
Ejemplo: En el modo operativo de ajuste se permite la operación de la máquina con la puerta
protectora abierta con la función SLS tan pronto como se acciona el pulsador de autorización.
El pulsador de autorización anula provisionalmente una función de seguridad que es sustituida
temporalmente por otra función de seguridad. La función del pulsador de autorización se obtiene
mediante una parametrización correspondiente de la lógica (demanda, terminar demanda) de las
funciones de seguridad.
Las siguientes funciones lógicas están asignadas de forma fija a determinadas entradas:
Terminal de mando de dos manos (DIN42A/B y DIN43A/B)El terminal de mando de dos manos se utiliza en aplicaciones en las que el operador debe habilitar el
movimiento con ambas manos en cuanto ha abandonado la zona de peligro. El terminal de mando de
dos manos ocupa dos pares de entradas seguras. Aquí también se puede sobrescribir una función de
seguridad, p. ej. SS1, con otra función, p. ej. SLS. La función del terminal de mando de dos manos
(supervisión de las dos entradas) está implementada en el módulo de seguridad como función lógica
fija; la conmutación de las funciones de seguridad se obtiene mediante una parametrización
correspondiente de la lógica (demanda, terminar demanda) de las funciones de seguridad.
Selector del modo de funcionamiento (DIN45, DIN46, DIN47)Sirve para seleccionar el modo de funcionamiento y admite los siguientes modos:
– servicio normal / modo de funcionamiento 1
– operación de ajuste / modo de funcionamiento 2
– modo especial / modo de funcionamiento 3
Nota: La denominación de los modos de funcionamiento se rige por las normas C para las máquinas
correspondientes. La función del selector del modo de funcionamiento (supervisión de las dos
entradas) está implementada en el módulo de seguridad como función lógica fija; la conmutación de
las funciones de seguridad se obtiene mediante una parametrización correspondiente de la lógica
(demanda, terminar demanda) de las funciones de seguridad.
RearranqueA través de la entrada de rearranque se pueden restablecer las funciones de seguridad que ya no se
solicitan en el momento del accionamiento de la entrada. Para el rearranque está previsto DIN49, sin
embargo también se puede parametrizar cualquier otra entrada como entrada de rearranque.
Ejemplo:
– Se ha solicitado SS1 a través de parada de emergencia y SS2 por medio del interruptor de contacto
de puerta.
– Ahora se desactiva la parada de emergencia, la puerta permanece abierta.
=> Al accionar la tecla de rearranque la instalación permanece parada con la función de seguridad SS2
activa y se puede volver a arrancar inmediatamente al cerrar la puerta protectora.
2 Descripción del producto Módulo de seguridad CAMC-G-S3
Festo – GDCP-CAMC-G-S3-ES – 1406NH – Español 51
Sensores activos (de dos canales)Los sensores activos son unidades con salidas de semiconductores de dos canales (salidas OSSD).
El módulo de seguridad admite sensores activos con señales de salida equivalentes/antivalentes, así
como con/sin salidas de pulsos de prueba. Con la ingeniería de seguridad integrada de la serie de
equipos CMMP-AS-...-M3 están permitidos los pulsos de prueba para la supervisión de las salidas y los
cables. Los sensores de conmutación positiva/negativa conmutan cables positivos y negativos o cables
de señal y de masa de una señal de sensor.
Las salidas tienen que conmutar simultáneamente. No obstante, las funciones de seguridad se activan
en cuanto se ha conectado al menos uno de los canales.
Ejemplos de sensores activos:
– barreras fotoeléctricas
– escáner de rayos láser
– controles
En sensores activos se detectan los siguientes errores:
– Señales de entrada antivalentes o equivalentes una vez finalizado el tiempo de discrepancia, según
el tipo de sensor y la parametrización
Sensores pasivos y activos (de un canal)Los sensores de un canal se utilizan para el control secuencial así como para retroseñales y diagnosis.
Ejemplos de sensores pasivos:
– contacto de recibo de una unidad de bloqueo externa,
– pulsadores para validar errores presentes,
– teclas para el rearranque.
Las combinaciones de sensores de un canal también se pueden utilizar para el control de funciones de
seguridad, por ejemplo:
– selectores de modos de funcionamiento (1 de selección N).
En errores pasivos de un canal se detectan los siguientes errores:
– En caso de alimentación a través de una salida segura del módulo de seguridad:
circuitos cruzados y cortocircuitos a +24 V y 0 V a causa de la ausencia de pulsos de prueba
Tipos de sensores permitidosLa Tab. 2.14 muestra un cuadro general de los tipos de sensores permitidos en las entradas digitales.
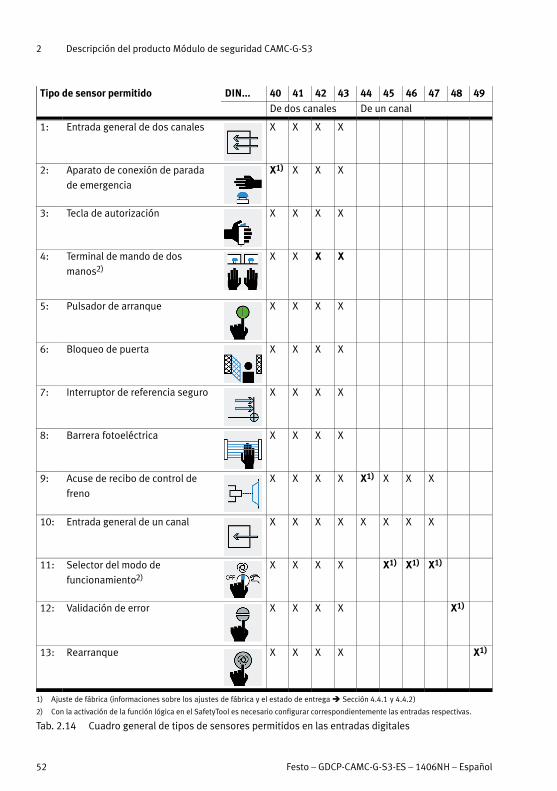
2 Descripción del producto Módulo de seguridad CAMC-G-S3
52 Festo – GDCP-CAMC-G-S3-ES – 1406NH – Español
Tipo de sensor permitido DIN... 40 41 42 43 44 45 46 47 48 49
De dos canales De un canal
1: Entrada general de dos canales X X X X
2: Aparato de conexión de parada
de emergencia
X1) X X X
3: Tecla de autorización X X X X
4: Terminal de mando de dos
manos2)X X X X
5: Pulsador de arranque X X X X
6: Bloqueo de puerta X X X X
7: Interruptor de referencia seguro X X X X
8: Barrera fotoeléctrica X X X X
9: Acuse de recibo de control de
freno
X X X X X1) X X X
10: Entrada general de un canal X X X X X X X X
11: Selector del modo de
funcionamiento2)X X X X X1) X1) X1)
12: Validación de error X X X X X1)
13: Rearranque X X X X X1)
1) Ajuste de fábrica (informaciones sobre los ajustes de fábrica y el estado de entrega � Sección 4.4.1 y 4.4.2)
2) Con la activación de la función lógica en el SafetyTool es necesario configurar correspondientemente las entradas respectivas.
Tab. 2.14 Cuadro general de tipos de sensores permitidos en las entradas digitales
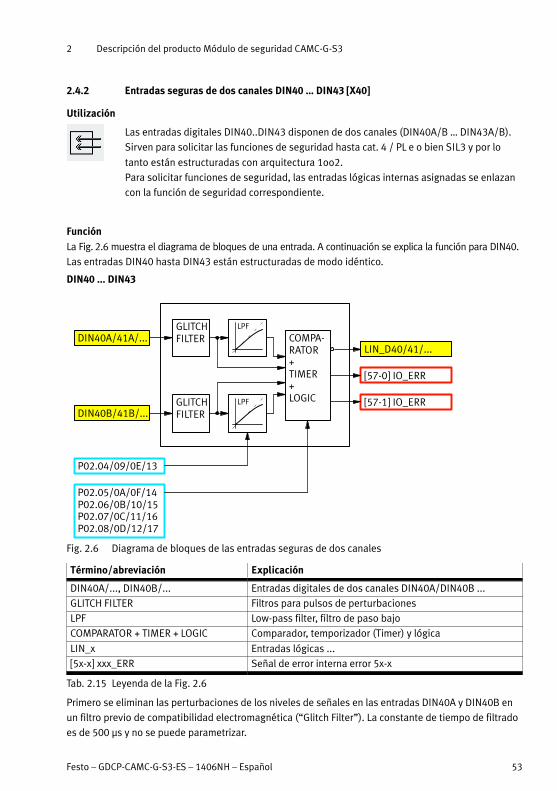
2 Descripción del producto Módulo de seguridad CAMC-G-S3
Festo – GDCP-CAMC-G-S3-ES – 1406NH – Español 53
2.4.2 Entradas seguras de dos canales DIN40 … DIN43 [X40]
Utilización
Las entradas digitales DIN40..DIN43 disponen de dos canales (DIN40A/B … DIN43A/B).
Sirven para solicitar las funciones de seguridad hasta cat. 4 / PL e o bien SIL3 y por lo
tanto están estructuradas con arquitectura 1oo2.
Para solicitar funciones de seguridad, las entradas lógicas internas asignadas se enlazan
con la función de seguridad correspondiente.
Función
La Fig. 2.6 muestra el diagrama de bloques de una entrada. A continuación se explica la función para DIN40.
Las entradas DIN40 hasta DIN43 están estructuradas de modo idéntico.
LIN_D40/41/...
[57-0] IO_ERR
DIN40A/41A/...
P02.04/09/0E/13
DIN40 ... DIN43
COMPA-RATOR+ TIMER+ LOGIC
GLITCHFILTER
LPF
[57-1] IO_ERRDIN40B/41B/...
GLITCHFILTER
LPF
P02.05/0A/0F/14P02.06/0B/10/15P02.07/0C/11/16P02.08/0D/12/17
Fig. 2.6 Diagrama de bloques de las entradas seguras de dos canales
Término/abreviación Explicación
DIN40A/..., DIN40B/... Entradas digitales de dos canales DIN40A/DIN40B ...
GLITCH FILTER Filtros para pulsos de perturbaciones
LPF Low-pass filter, filtro de paso bajo
COMPARATOR + TIMER + LOGIC Comparador, temporizador (Timer) y lógica
LIN_x Entradas lógicas ...
[5x-x] xxx_ERR Señal de error interna error 5x-x
Tab. 2.15 Leyenda de la Fig. 2.6
Primero se eliminan las perturbaciones de los niveles de señales en las entradas DIN40A y DIN40B en
un filtro previo de compatibilidad electromagnética (“Glitch Filter”). La constante de tiempo de filtrado
es de 500 μs y no se puede parametrizar.
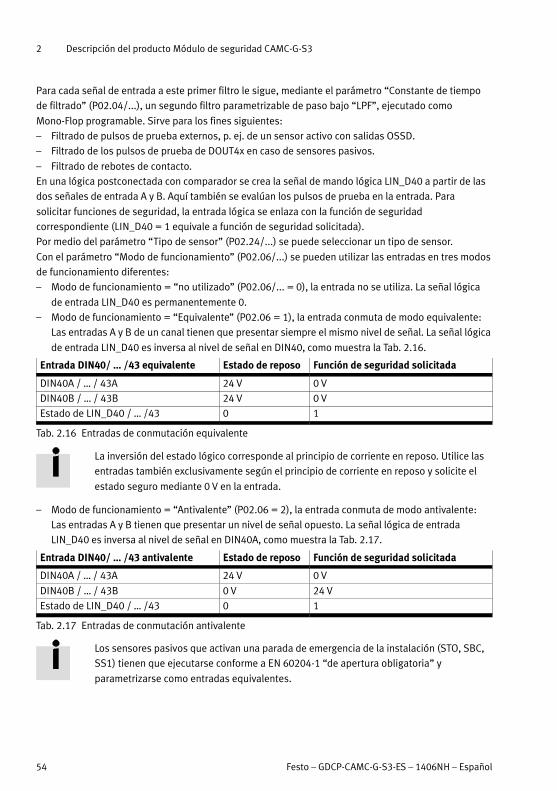
2 Descripción del producto Módulo de seguridad CAMC-G-S3
54 Festo – GDCP-CAMC-G-S3-ES – 1406NH – Español
Para cada señal de entrada a este primer filtro le sigue, mediante el parámetro “Constante de tiempo
de filtrado” (P02.04/...), un segundo filtro parametrizable de paso bajo “LPF”, ejecutado como
Mono-Flop programable. Sirve para los fines siguientes:
– Filtrado de pulsos de prueba externos, p. ej. de un sensor activo con salidas OSSD.
– Filtrado de los pulsos de prueba de DOUT4x en caso de sensores pasivos.
– Filtrado de rebotes de contacto.
En una lógica postconectada con comparador se crea la señal de mando lógica LIN_D40 a partir de las
dos señales de entrada A y B. Aquí también se evalúan los pulsos de prueba en la entrada. Para
solicitar funciones de seguridad, la entrada lógica se enlaza con la función de seguridad
correspondiente (LIN_D40 = 1 equivale a función de seguridad solicitada).
Por medio del parámetro “Tipo de sensor” (P02.24/...) se puede seleccionar un tipo de sensor.
Con el parámetro “Modo de funcionamiento” (P02.06/...) se pueden utilizar las entradas en tres modos
de funcionamiento diferentes:
– Modo de funcionamiento = “no utilizado” (P02.06/... = 0), la entrada no se utiliza. La señal lógica
de entrada LIN_D40 es permanentemente 0.
– Modo de funcionamiento = “Equivalente” (P02.06 = 1), la entrada conmuta de modo equivalente:
Las entradas A y B de un canal tienen que presentar siempre el mismo nivel de señal. La señal lógica
de entrada LIN_D40 es inversa al nivel de señal en DIN40, como muestra la Tab. 2.16.
Entrada DIN40/ … /43 equivalente Estado de reposo Función de seguridad solicitada
DIN40A / … / 43A 24 V 0 V
DIN40B / … / 43B 24 V 0 V
Estado de LIN_D40 / … /43 0 1
Tab. 2.16 Entradas de conmutación equivalente
La inversión del estado lógico corresponde al principio de corriente en reposo. Utilice las
entradas también exclusivamente según el principio de corriente en reposo y solicite el
estado seguro mediante 0 V en la entrada.
– Modo de funcionamiento = “Antivalente” (P02.06 = 2), la entrada conmuta de modo antivalente:
Las entradas A y B tienen que presentar un nivel de señal opuesto. La señal lógica de entrada
LIN_D40 es inversa al nivel de señal en DIN40A, como muestra la Tab. 2.17.
Entrada DIN40/ … /43 antivalente Estado de reposo Función de seguridad solicitada
DIN40A / … / 43A 24 V 0 V
DIN40B / … / 43B 0 V 24 V
Estado de LIN_D40 / … /43 0 1
Tab. 2.17 Entradas de conmutación antivalente
Los sensores pasivos que activan una parada de emergencia de la instalación (STO, SBC,
SS1) tienen que ejecutarse conforme a EN 60204-1 “de apertura obligatoria” y
parametrizarse como entradas equivalentes.
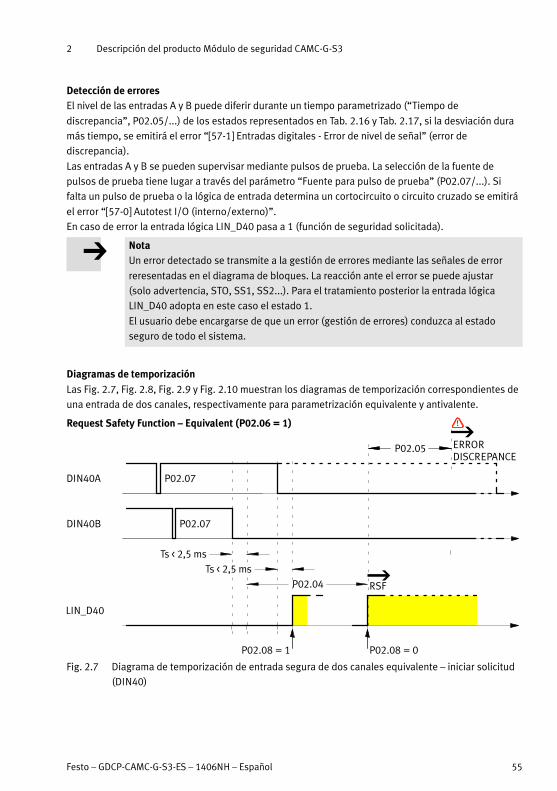
2 Descripción del producto Módulo de seguridad CAMC-G-S3
Festo – GDCP-CAMC-G-S3-ES – 1406NH – Español 55
Detección de erroresEl nivel de las entradas A y B puede diferir durante un tiempo parametrizado (“Tiempo de
discrepancia”, P02.05/...) de los estados representados en Tab. 2.16 y Tab. 2.17, si la desviación dura
más tiempo, se emitirá el error “[57-1] Entradas digitales - Error de nivel de señal” (error de
discrepancia).
Las entradas A y B se pueden supervisar mediante pulsos de prueba. La selección de la fuente de
pulsos de prueba tiene lugar a través del parámetro “Fuente para pulso de prueba” (P02.07/...). Si
falta un pulso de prueba o la lógica de entrada determina un cortocircuito o circuito cruzado se emitirá
el error “[57-0] Autotest I/O (interno/externo)”.
En caso de error la entrada lógica LIN_D40 pasa a 1 (función de seguridad solicitada).
NotaUn error detectado se transmite a la gestión de errores mediante las señales de error
reresentadas en el diagrama de bloques. La reacción ante el error se puede ajustar
(solo advertencia, STO, SS1, SS2...). Para el tratamiento posterior la entrada lógica
LIN_D40 adopta en este caso el estado 1.
El usuario debe encargarse de que un error (gestión de errores) conduzca al estado
seguro de todo el sistema.
Diagramas de temporización
Las Fig. 2.7, Fig. 2.8, Fig. 2.9 y Fig. 2.10 muestran los diagramas de temporización correspondientes de
una entrada de dos canales, respectivamente para parametrización equivalente y antivalente.
DIN40A
P02.05
DIN40B
LIN_D40
RSFP02.04
Ts < 2,5 ms
P02.08 = 1 P02.08 = 0
P02.07
P02.07
Request Safety Function – Equivalent (P02.06 = 1)
Ts < 2,5 ms
ERRORDISCREPANCE
Fig. 2.7 Diagrama de temporización de entrada segura de dos canales equivalente – iniciar solicitud
(DIN40)
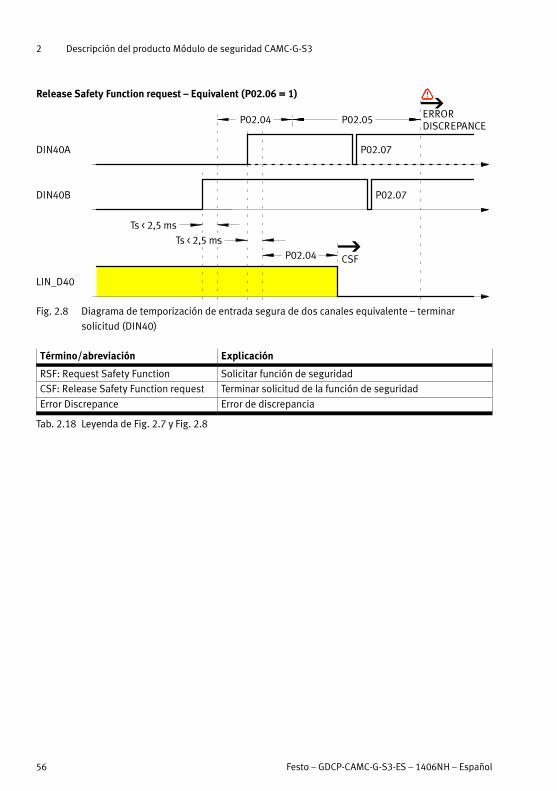
2 Descripción del producto Módulo de seguridad CAMC-G-S3
56 Festo – GDCP-CAMC-G-S3-ES – 1406NH – Español
DIN40A
DIN40B
ERRORDISCREPANCE
LIN_D40
CSF
P02.07
P02.07
P02.04
Ts < 2,5 ms
Ts < 2,5 ms
P02.04 P02.05
Release Safety Function request – Equivalent (P02.06 = 1)
Fig. 2.8 Diagrama de temporización de entrada segura de dos canales equivalente – terminar
solicitud (DIN40)
Término/abreviación Explicación
RSF: Request Safety Function Solicitar función de seguridad
CSF: Release Safety Function request Terminar solicitud de la función de seguridad
Error Discrepance Error de discrepancia
Tab. 2.18 Leyenda de Fig. 2.7 y Fig. 2.8
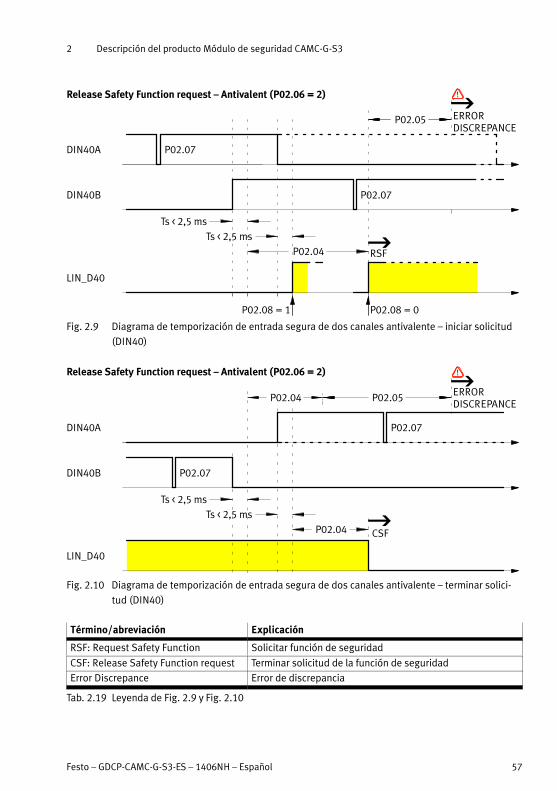
2 Descripción del producto Módulo de seguridad CAMC-G-S3
Festo – GDCP-CAMC-G-S3-ES – 1406NH – Español 57
P02.05
DIN40A
DIN40B
LIN_D40
RSFP02.04
Ts < 2,5 ms
P02.08 = 1 P02.08 = 0
P02.07
P02.07
Release Safety Function request – Antivalent (P02.06 = 2)
Ts < 2,5 ms
ERRORDISCREPANCE
Fig. 2.9 Diagrama de temporización de entrada segura de dos canales antivalente – iniciar solicitud
(DIN40)
ERRORDISCREPANCE
DIN40A
DIN40B
LIN_D40
CSF
P02.07
P02.07
P02.04
Ts < 2,5 ms
Ts < 2,5 ms
P02.04 P02.05
Release Safety Function request – Antivalent (P02.06 = 2)
Fig. 2.10 Diagrama de temporización de entrada segura de dos canales antivalente – terminar solici
tud (DIN40)
Término/abreviación Explicación
RSF: Request Safety Function Solicitar función de seguridad
CSF: Release Safety Function request Terminar solicitud de la función de seguridad
Error Discrepance Error de discrepancia
Tab. 2.19 Leyenda de Fig. 2.9 y Fig. 2.10
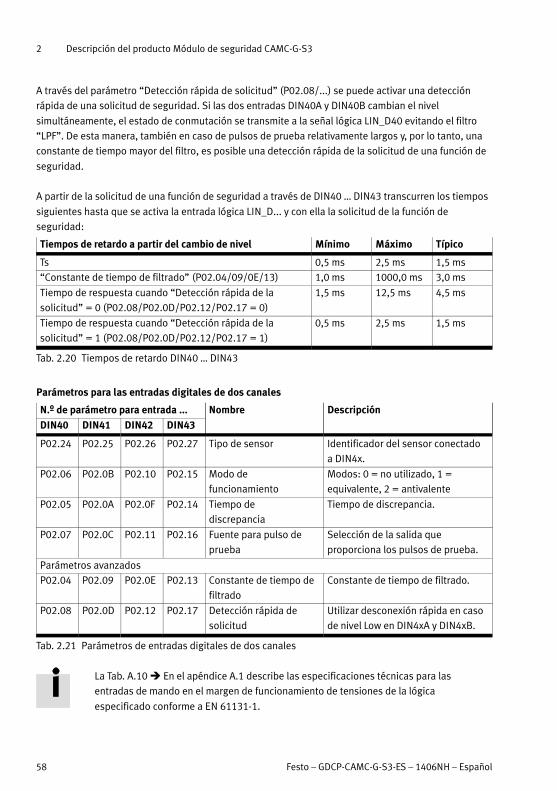
2 Descripción del producto Módulo de seguridad CAMC-G-S3
58 Festo – GDCP-CAMC-G-S3-ES – 1406NH – Español
A través del parámetro “Detección rápida de solicitud” (P02.08/...) se puede activar una detección
rápida de una solicitud de seguridad. Si las dos entradas DIN40A y DIN40B cambian el nivel
simultáneamente, el estado de conmutación se transmite a la señal lógica LIN_D40 evitando el filtro
“LPF”. De esta manera, también en caso de pulsos de prueba relativamente largos y, por lo tanto, una
constante de tiempo mayor del filtro, es posible una detección rápida de la solicitud de una función de
seguridad.
A partir de la solicitud de una función de seguridad a través de DIN40 … DIN43 transcurren los tiempos
siguientes hasta que se activa la entrada lógica LIN_D... y con ella la solicitud de la función de
seguridad:
Tiempos de retardo a partir del cambio de nivel Mínimo Máximo Típico
Ts 0,5 ms 2,5 ms 1,5 ms
“Constante de tiempo de filtrado” (P02.04/09/0E/13) 1,0 ms 1000,0 ms 3,0 ms
Tiempo de respuesta cuando “Detección rápida de la
solicitud” = 0 (P02.08/P02.0D/P02.12/P02.17 = 0)
1,5 ms 12,5 ms 4,5 ms
Tiempo de respuesta cuando “Detección rápida de la
solicitud” = 1 (P02.08/P02.0D/P02.12/P02.17 = 1)
0,5 ms 2,5 ms 1,5 ms
Tab. 2.20 Tiempos de retardo DIN40 … DIN43
Parámetros para las entradas digitales de dos canales
N.º de parámetro para entrada ... Nombre Descripción
DIN40 DIN41 DIN42 DIN43
P02.24 P02.25 P02.26 P02.27 Tipo de sensor Identificador del sensor conectado
a DIN4x.
P02.06 P02.0B P02.10 P02.15 Modo de
funcionamiento
Modos: 0 = no utilizado, 1 =
equivalente, 2 = antivalente
P02.05 P02.0A P02.0F P02.14 Tiempo de
discrepancia
Tiempo de discrepancia.
P02.07 P02.0C P02.11 P02.16 Fuente para pulso de
prueba
Selección de la salida que
proporciona los pulsos de prueba.
Parámetros avanzados
P02.04 P02.09 P02.0E P02.13 Constante de tiempo de
filtrado
Constante de tiempo de filtrado.
P02.08 P02.0D P02.12 P02.17 Detección rápida de
solicitud
Utilizar desconexión rápida en caso
de nivel Low en DIN4xA y DIN4xB.
Tab. 2.21 Parámetros de entradas digitales de dos canales
La Tab. A.10 � En el apéndice A.1 describe las especificaciones técnicas para las
entradas de mando en el margen de funcionamiento de tensiones de la lógica
especificado conforme a EN 61131-1.
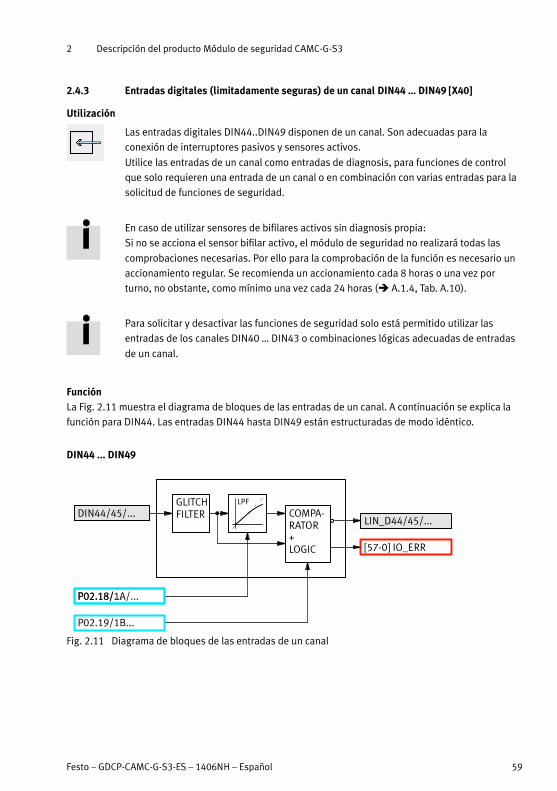
2 Descripción del producto Módulo de seguridad CAMC-G-S3
Festo – GDCP-CAMC-G-S3-ES – 1406NH – Español 59
2.4.3 Entradas digitales (limitadamente seguras) de un canal DIN44 … DIN49 [X40]
Utilización
Las entradas digitales DIN44..DIN49 disponen de un canal. Son adecuadas para la
conexión de interruptores pasivos y sensores activos.
Utilice las entradas de un canal como entradas de diagnosis, para funciones de control
que solo requieren una entrada de un canal o en combinación con varias entradas para la
solicitud de funciones de seguridad.
En caso de utilizar sensores de bifilares activos sin diagnosis propia:
Si no se acciona el sensor bifilar activo, el módulo de seguridad no realizará todas las
comprobaciones necesarias. Por ello para la comprobación de la función es necesario un
accionamiento regular. Se recomienda un accionamiento cada 8 horas o una vez por
turno, no obstante, como mínimo una vez cada 24 horas (� A.1.4, Tab. A.10).
Para solicitar y desactivar las funciones de seguridad solo está permitido utilizar las
entradas de los canales DIN40 … DIN43 o combinaciones lógicas adecuadas de entradas
de un canal.
FunciónLa Fig. 2.11 muestra el diagrama de bloques de las entradas de un canal. A continuación se explica la
función para DIN44. Las entradas DIN44 hasta DIN49 están estructuradas de modo idéntico.
LIN_D44/45/...
[57-0] IO_ERR
DIN44/45/...
P02.18/...
DIN44 ... DIN49
COMPA-RATOR+ LOGIC
GLITCHFILTER
LPF
P02.18/1A/...
P02.19/1B...
Fig. 2.11 Diagrama de bloques de las entradas de un canal
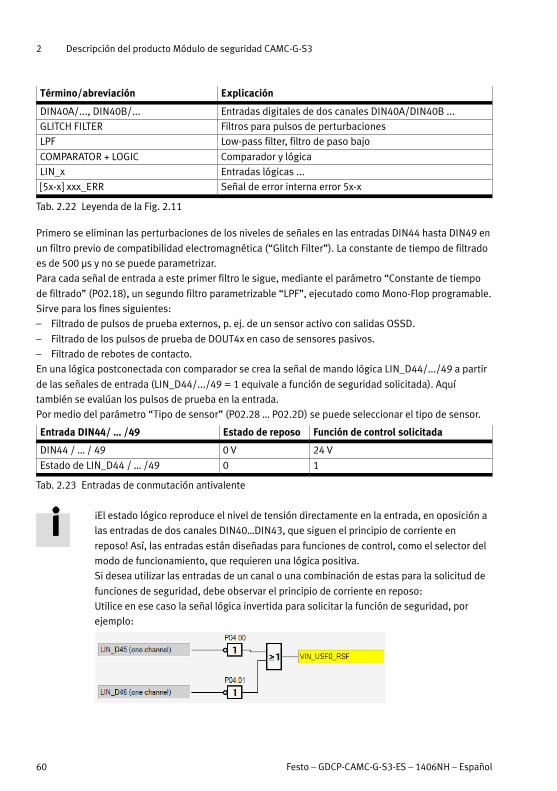
2 Descripción del producto Módulo de seguridad CAMC-G-S3
60 Festo – GDCP-CAMC-G-S3-ES – 1406NH – Español
Término/abreviación Explicación
DIN40A/..., DIN40B/... Entradas digitales de dos canales DIN40A/DIN40B ...
GLITCH FILTER Filtros para pulsos de perturbaciones
LPF Low-pass filter, filtro de paso bajo
COMPARATOR + LOGIC Comparador y lógica
LIN_x Entradas lógicas ...
[5x-x] xxx_ERR Señal de error interna error 5x-x
Tab. 2.22 Leyenda de la Fig. 2.11
Primero se eliminan las perturbaciones de los niveles de señales en las entradas DIN44 hasta DIN49 en
un filtro previo de compatibilidad electromagnética (“Glitch Filter”). La constante de tiempo de filtrado
es de 500 μs y no se puede parametrizar.
Para cada señal de entrada a este primer filtro le sigue, mediante el parámetro “Constante de tiempo
de filtrado” (P02.18), un segundo filtro parametrizable “LPF”, ejecutado como Mono-Flop programable.
Sirve para los fines siguientes:
– Filtrado de pulsos de prueba externos, p. ej. de un sensor activo con salidas OSSD.
– Filtrado de los pulsos de prueba de DOUT4x en caso de sensores pasivos.
– Filtrado de rebotes de contacto.
En una lógica postconectada con comparador se crea la señal de mando lógica LIN_D44/.../49 a partir
de las señales de entrada (LIN_D44/.../49 = 1 equivale a función de seguridad solicitada). Aquí
también se evalúan los pulsos de prueba en la entrada.
Por medio del parámetro “Tipo de sensor” (P02.28 … P02.2D) se puede seleccionar el tipo de sensor.
Entrada DIN44/ … /49 Estado de reposo Función de control solicitada
DIN44 / … / 49 0 V 24 V
Estado de LIN_D44 / … /49 0 1
Tab. 2.23 Entradas de conmutación antivalente
¡El estado lógico reproduce el nivel de tensión directamente en la entrada, en oposición a
las entradas de dos canales DIN40…DIN43, que siguen el principio de corriente en
reposo! Así, las entradas están diseñadas para funciones de control, como el selector del
modo de funcionamiento, que requieren una lógica positiva.
Si desea utilizar las entradas de un canal o una combinación de estas para la solicitud de
funciones de seguridad, debe observar el principio de corriente en reposo:
Utilice en ese caso la señal lógica invertida para solicitar la función de seguridad, por
ejemplo:
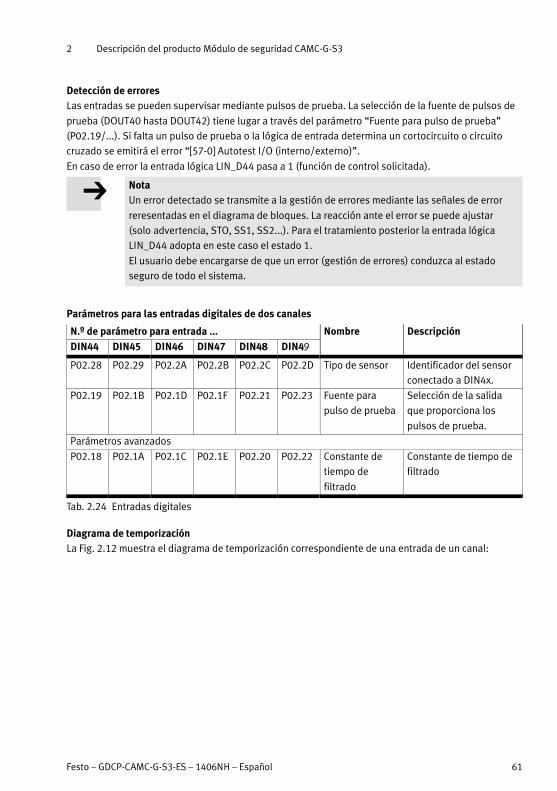
2 Descripción del producto Módulo de seguridad CAMC-G-S3
Festo – GDCP-CAMC-G-S3-ES – 1406NH – Español 61
Detección de erroresLas entradas se pueden supervisar mediante pulsos de prueba. La selección de la fuente de pulsos de
prueba (DOUT40 hasta DOUT42) tiene lugar a través del parámetro “Fuente para pulso de prueba”
(P02.19/...). Si falta un pulso de prueba o la lógica de entrada determina un cortocircuito o circuito
cruzado se emitirá el error “[57-0] Autotest I/O (interno/externo)”.
En caso de error la entrada lógica LIN_D44 pasa a 1 (función de control solicitada).
NotaUn error detectado se transmite a la gestión de errores mediante las señales de error
reresentadas en el diagrama de bloques. La reacción ante el error se puede ajustar
(solo advertencia, STO, SS1, SS2...). Para el tratamiento posterior la entrada lógica
LIN_D44 adopta en este caso el estado 1.
El usuario debe encargarse de que un error (gestión de errores) conduzca al estado
seguro de todo el sistema.
Parámetros para las entradas digitales de dos canales
N.º de parámetro para entrada ... Nombre Descripción
DIN44 DIN45 DIN46 DIN47 DIN48 DIN49
P02.28 P02.29 P02.2A P02.2B P02.2C P02.2D Tipo de sensor Identificador del sensor
conectado a DIN4x.
P02.19 P02.1B P02.1D P02.1F P02.21 P02.23 Fuente para
pulso de prueba
Selección de la salida
que proporciona los
pulsos de prueba.
Parámetros avanzados
P02.18 P02.1A P02.1C P02.1E P02.20 P02.22 Constante de
tiempo de
filtrado
Constante de tiempo de
filtrado
Tab. 2.24 Entradas digitales
Diagrama de temporizaciónLa Fig. 2.12 muestra el diagrama de temporización correspondiente de una entrada de un canal:
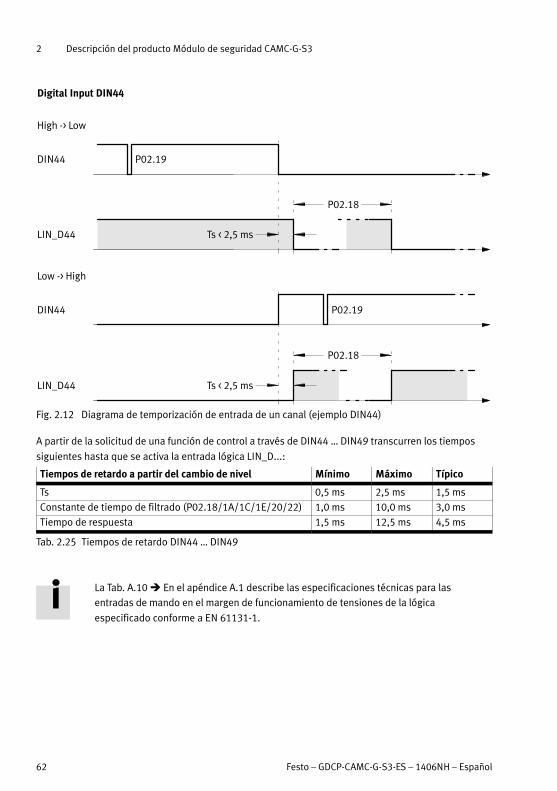
2 Descripción del producto Módulo de seguridad CAMC-G-S3
62 Festo – GDCP-CAMC-G-S3-ES – 1406NH – Español
DIN44
Digital Input DIN44
LIN_D44
P02.18
Ts < 2,5 ms
P02.19
DIN44
LIN_D44
P02.18
Ts < 2,5 ms
P02.19
High -> Low
Low -> High
Fig. 2.12 Diagrama de temporización de entrada de un canal (ejemplo DIN44)
A partir de la solicitud de una función de control a través de DIN44 … DIN49 transcurren los tiempos
siguientes hasta que se activa la entrada lógica LIN_D...:
Tiempos de retardo a partir del cambio de nivel Mínimo Máximo Típico
Ts 0,5 ms 2,5 ms 1,5 ms
Constante de tiempo de filtrado (P02.18/1A/1C/1E/20/22) 1,0 ms 10,0 ms 3,0 ms
Tiempo de respuesta 1,5 ms 12,5 ms 4,5 ms
Tab. 2.25 Tiempos de retardo DIN44 … DIN49
La Tab. A.10 � En el apéndice A.1 describe las especificaciones técnicas para las
entradas de mando en el margen de funcionamiento de tensiones de la lógica
especificado conforme a EN 61131-1.
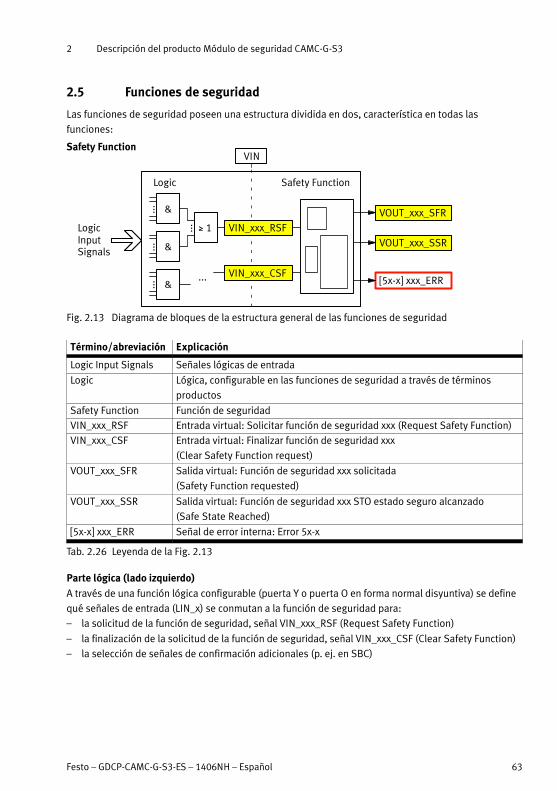
2 Descripción del producto Módulo de seguridad CAMC-G-S3
Festo – GDCP-CAMC-G-S3-ES – 1406NH – Español 63
2.5 Funciones de seguridad
Las funciones de seguridad poseen una estructura dividida en dos, característica en todas las
funciones:
VOUT_xxx_SFR
[5x-x] xxx_ERR
Safety Function
1
VOUT_xxx_SSR
Logic Input Signals
&
&
&
...
...
......
...
VIN
VIN_xxx_RSF
VIN_xxx_CSF
Logic Safety Function
Fig. 2.13 Diagrama de bloques de la estructura general de las funciones de seguridad
Término/abreviación Explicación
Logic Input Signals Señales lógicas de entrada
Logic Lógica, configurable en las funciones de seguridad a través de términos
productos
Safety Function Función de seguridad
VIN_xxx_RSF Entrada virtual: Solicitar función de seguridad xxx (Request Safety Function)
VIN_xxx_CSF Entrada virtual: Finalizar función de seguridad xxx
(Clear Safety Function request)
VOUT_xxx_SFR Salida virtual: Función de seguridad xxx solicitada
(Safety Function requested)
VOUT_xxx_SSR Salida virtual: Función de seguridad xxx STO estado seguro alcanzado
(Safe State Reached)
[5x-x] xxx_ERR Señal de error interna: Error 5x-x
Tab. 2.26 Leyenda de la Fig. 2.13
Parte lógica (lado izquierdo)
A través de una función lógica configurable (puerta Y o puerta O en forma normal disyuntiva) se define
qué señales de entrada (LIN_x) se conmutan a la función de seguridad para:
– la solicitud de la función de seguridad, señal VIN_xxx_RSF (Request Safety Function)
– la finalización de la solicitud de la función de seguridad, señal VIN_xxx_CSF (Clear Safety Function)
– la selección de señales de confirmación adicionales (p. ej. en SBC)
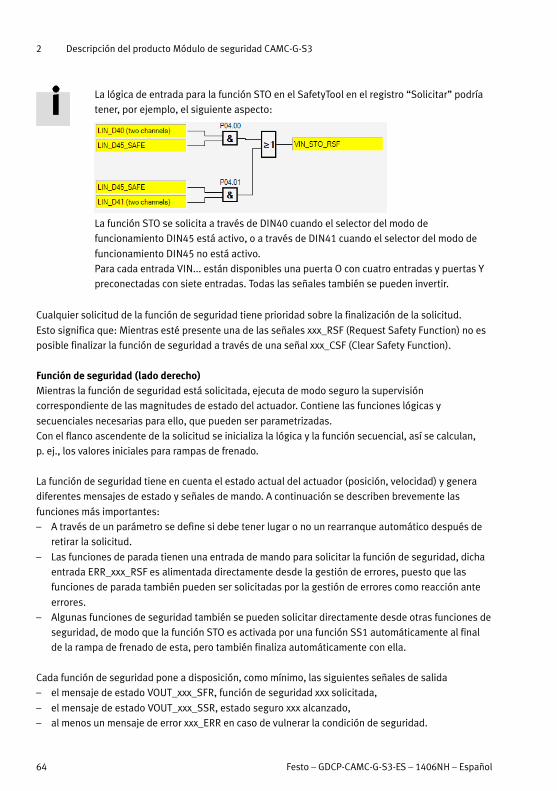
2 Descripción del producto Módulo de seguridad CAMC-G-S3
64 Festo – GDCP-CAMC-G-S3-ES – 1406NH – Español
La lógica de entrada para la función STO en el SafetyTool en el registro “Solicitar” podría
tener, por ejemplo, el siguiente aspecto:
La función STO se solicita a través de DIN40 cuando el selector del modo de
funcionamiento DIN45 está activo, o a través de DIN41 cuando el selector del modo de
funcionamiento DIN45 no está activo.
Para cada entrada VIN... están disponibles una puerta O con cuatro entradas y puertas Y
preconectadas con siete entradas. Todas las señales también se pueden invertir.
Cualquier solicitud de la función de seguridad tiene prioridad sobre la finalización de la solicitud.
Esto significa que: Mientras esté presente una de las señales xxx_RSF (Request Safety Function) no es
posible finalizar la función de seguridad a través de una señal xxx_CSF (Clear Safety Function).
Función de seguridad (lado derecho)Mientras la función de seguridad está solicitada, ejecuta de modo seguro la supervisión
correspondiente de las magnitudes de estado del actuador. Contiene las funciones lógicas y
secuenciales necesarias para ello, que pueden ser parametrizadas.
Con el flanco ascendente de la solicitud se inicializa la lógica y la función secuencial, así se calculan,
p. ej., los valores iniciales para rampas de frenado.
La función de seguridad tiene en cuenta el estado actual del actuador (posición, velocidad) y genera
diferentes mensajes de estado y señales de mando. A continuación se describen brevemente las
funciones más importantes:
– A través de un parámetro se define si debe tener lugar o no un rearranque automático después de
retirar la solicitud.
– Las funciones de parada tienen una entrada de mando para solicitar la función de seguridad, dicha
entrada ERR_xxx_RSF es alimentada directamente desde la gestión de errores, puesto que las
funciones de parada también pueden ser solicitadas por la gestión de errores como reacción ante
errores.
– Algunas funciones de seguridad también se pueden solicitar directamente desde otras funciones de
seguridad, de modo que la función STO es activada por una función SS1 automáticamente al final
de la rampa de frenado de esta, pero también finaliza automáticamente con ella.
Cada función de seguridad pone a disposición, como mínimo, las siguientes señales de salida
– el mensaje de estado VOUT_xxx_SFR, función de seguridad xxx solicitada,
– el mensaje de estado VOUT_xxx_SSR, estado seguro xxx alcanzado,
– al menos un mensaje de error xxx_ERR en caso de vulnerar la condición de seguridad.
2 Descripción del producto Módulo de seguridad CAMC-G-S3
Festo – GDCP-CAMC-G-S3-ES – 1406NH – Español 65
Algunas funciones de seguridad proporcionan, además, otras señales de mando, p. ej.
– para el control directo del hardware, p. ej. la alimentación del excitador o la salida del freno de
sostenimiento para el control seguro de freno,
– para la solicitud de funciones de seguridad postconectadas, p. ej. STO_SBC_RSF.
Estas señales de salida se pueden transmitir al control funcional como mensajes de
estado; se pueden utilizar a través de salidas seguras para el control de dispositivos de
desconexión de seguridad externos, con ello se puede controlar, por ejemplo, una unidad
de bloqueo externa.
Las funciones de seguridad para la supervisión de movimiento utilizan adicionalmente la velocidad
registrada de modo seguro (ACTUAL_SPEED) o la posición registrada de modo seguro
(ACTUAL_POSITION) para la supervisión. Controlan la velocidad permitida en la parte funcional del
controlador de motor a través de una limitación de la velocidad (SPEED_LIMIT).
Las funciones de seguridad se configuran por medio de una serie de parámetros; se pueden ajustar:
– rampas de velocidad,
– valore límite de supervisión para velocidad y posición,
– tiempos de retardo.
Otras opciones ajustables son:
– El comportamiento para el rearranque.
– El modo en que el módulo de seguridad interviene en el funcionamiento de la unidad básica:
– No interviene activamente y solo supervisa.
– Controla la parada rápida en la unidad básica y causa una parada rápida en esta mientras
supervisa el proceso de frenado.
– Reduce activamente la velocidad en la unidad básica y comprueba al mismo tiempo que se
observen los valores límite.
La norma EN 61800-5-2 define las distintas funciones de seguridad para reguladores de
accionamiento. Define también tres métodos para la supervisión del proceso de frenado.
Por medio de la configuración descrita arriba, el módulo de seguridad admite todos los
métodos que figuran en la norma.
El módulo de seguridad admite las siguientes funciones de parada segura y de movimiento
seguro descritas en las siguientes secciones conforme a � Sección 2.2.3, Tab. 2.4.
2 Descripción del producto Módulo de seguridad CAMC-G-S3
66 Festo – GDCP-CAMC-G-S3-ES – 1406NH – Español
2.5.1 STO – Desconexión segura del par (Safe Torque Off )
Aplicación
La función descrita aquí pone en práctica la función de seguridad STO conforme a EN
61800-5-2 (categoría de parada 0 de EN 60204-1).
Utilice la función de desconexión segura del par (“Safe Torque Off ”, STO), si en su
aplicación tiene que desconectar de forma segura la alimentación de energía al motor,
pero no existen más solicitudes de una parada expresa del actuador.
La función STO está activada a través del ajuste de fábrica (parametrización previa).
Puesto que esta función es utilizada por otras funciones (solicitud mediante SS1 o
reacción ante errores en caso de vulneración de otras funciones de seguridad
solicitadas), nunca se puede anular su selección.
FunciónLa función “Desconexión segura del par” desconecta la alimentación del excitador para el
semiconductor de potencia e impide así que el paso de salida de potencia suministre la energía
requerida por el motor.
Con la función de seguridad STO “Safe Torque Off ” se interrumpe de forma segura la alimentación de
energía del actuador. El accionamiento no puede generar ningún par de giro ni, por tanto, ningún
movimiento peligroso. En caso de que haya cargas en suspensión u otras fuerzas externas hay que
prever medidas adicionales para evitar de modo seguro un posible desplome (p. ej. unidades de
bloqueo mecánicas). En estado STO “Safe Torque Off ” (desconexión segura del par) no se efectúa
ninguna supervisión de la posición de parada.
La parada de la máquina debe ser provocada y asegurada a través de un sistema de seguridad. Esto es
válido especialmente para ejes verticales sin sistema mecánico autobloqueante, unidad de bloqueo ni
contrapeso.
NotaExiste peligro de sacudidas del accionamiento si ocurren fallos múltiples en el
CMMP-AS-...-M3.
Si durante el estado STO falla el paso de salida del controlador de motor (cortocircuito
simultáneo de 2 semiconductores de potencia en diferentes pasos), puede generarse
un movimiento de retención limitado del rotor. El ángulo de giro / paso equivale a un
paso polar. Ejemplos:
– Eje rotativo, máquina sincrónica, de 8 contactos � Movimiento 45° en el árbol de
motor.
– Motor lineal, paso polar 20 mm � Movimiento 20 mm en la pieza móvil.
¡La función STO (Safe Torque Off ) no protege frente a descargas eléctricas, sino
exclusivamente frente a movimientos peligrosos! No tiene lugar ninguna separación del
actuador de la alimentación de energía en el sentido de la protección contra descargas
eléctricas � Descripción del hardware, GDCP-CMMP-M3-HW-...
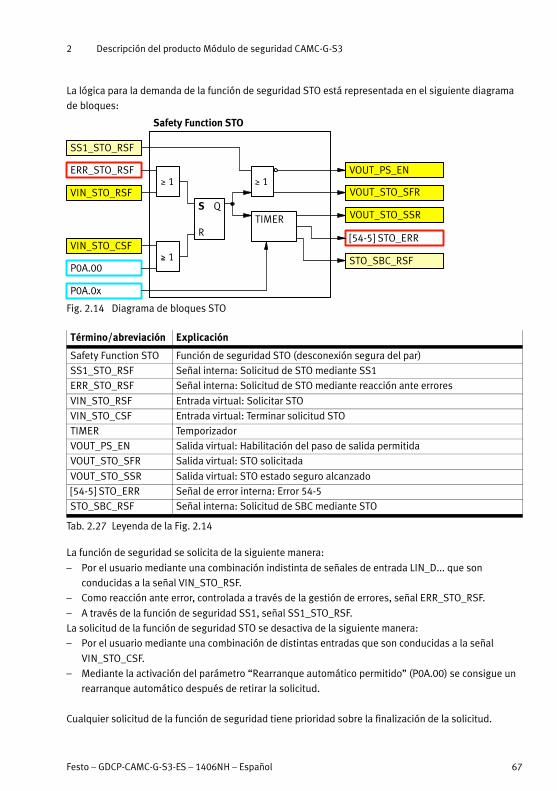
2 Descripción del producto Módulo de seguridad CAMC-G-S3
Festo – GDCP-CAMC-G-S3-ES – 1406NH – Español 67
La lógica para la demanda de la función de seguridad STO está representada en el siguiente diagrama
de bloques:
VOUT_PS_EN
[54-5] STO_ERR
SS1_STO_RSF
VIN_STO_RSF
ERR_STO_RSF
VIN_STO_CSF
P0A.00
Safety Function STO
TIMERS
R
Q
STO_SBC_RSF1
1 1
P0A.0x
VOUT_STO_SFR
VOUT_STO_SSR
Fig. 2.14 Diagrama de bloques STO
Término/abreviación Explicación
Safety Function STO Función de seguridad STO (desconexión segura del par)
SS1_STO_RSF Señal interna: Solicitud de STO mediante SS1
ERR_STO_RSF Señal interna: Solicitud de STO mediante reacción ante errores
VIN_STO_RSF Entrada virtual: Solicitar STO
VIN_STO_CSF Entrada virtual: Terminar solicitud STO
TIMER Temporizador
VOUT_PS_EN Salida virtual: Habilitación del paso de salida permitida
VOUT_STO_SFR Salida virtual: STO solicitada
VOUT_STO_SSR Salida virtual: STO estado seguro alcanzado
[54-5] STO_ERR Señal de error interna: Error 54-5
STO_SBC_RSF Señal interna: Solicitud de SBC mediante STO
Tab. 2.27 Leyenda de la Fig. 2.14
La función de seguridad se solicita de la siguiente manera:
– Por el usuario mediante una combinación indistinta de señales de entrada LIN_D... que son
conducidas a la señal VIN_STO_RSF.
– Como reacción ante error, controlada a través de la gestión de errores, señal ERR_STO_RSF.
– A través de la función de seguridad SS1, señal SS1_STO_RSF.
La solicitud de la función de seguridad STO se desactiva de la siguiente manera:
– Por el usuario mediante una combinación de distintas entradas que son conducidas a la señal
VIN_STO_CSF.
– Mediante la activación del parámetro “Rearranque automático permitido” (P0A.00) se consigue un
rearranque automático después de retirar la solicitud.
Cualquier solicitud de la función de seguridad tiene prioridad sobre la finalización de la solicitud.
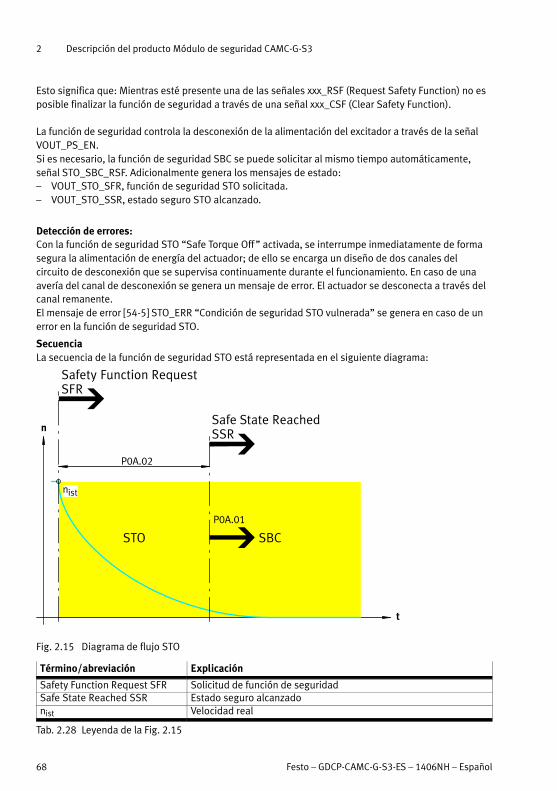
2 Descripción del producto Módulo de seguridad CAMC-G-S3
68 Festo – GDCP-CAMC-G-S3-ES – 1406NH – Español
Esto significa que: Mientras esté presente una de las señales xxx_RSF (Request Safety Function) no esposible finalizar la función de seguridad a través de una señal xxx_CSF (Clear Safety Function).
La función de seguridad controla la desconexión de la alimentación del excitador a través de la señalVOUT_PS_EN.Si es necesario, la función de seguridad SBC se puede solicitar al mismo tiempo automáticamente,señal STO_SBC_RSF. Adicionalmente genera los mensajes de estado:– VOUT_STO_SFR, función de seguridad STO solicitada.– VOUT_STO_SSR, estado seguro STO alcanzado.
Detección de errores:Con la función de seguridad STO “Safe Torque Off ” activada, se interrumpe inmediatamente de formasegura la alimentación de energía del actuador; de ello se encarga un diseño de dos canales delcircuito de desconexión que se supervisa continuamente durante el funcionamiento. En caso de unaavería del canal de desconexión se genera un mensaje de error. El actuador se desconecta a través delcanal remanente.El mensaje de error [54-5] STO_ERR “Condición de seguridad STO vulnerada” se genera en caso de unerror en la función de seguridad STO.
SecuenciaLa secuencia de la función de seguridad STO está representada en el siguiente diagrama:
Safety Function RequestSFR
P0A.02
n
t
Safe State ReachedSSR
nist
SBC
P0A.01
STO
Fig. 2.15 Diagrama de flujo STO
Término/abreviación Explicación
Safety Function Request SFR Solicitud de función de seguridadSafe State Reached SSR Estado seguro alcanzadonist Velocidad real
Tab. 2.28 Leyenda de la Fig. 2.15
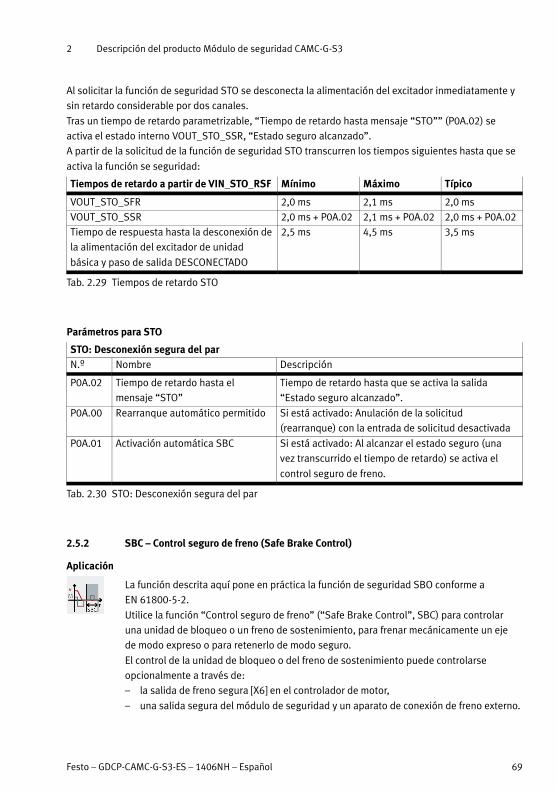
2 Descripción del producto Módulo de seguridad CAMC-G-S3
Festo – GDCP-CAMC-G-S3-ES – 1406NH – Español 69
Al solicitar la función de seguridad STO se desconecta la alimentación del excitador inmediatamente y
sin retardo considerable por dos canales.
Tras un tiempo de retardo parametrizable, “Tiempo de retardo hasta mensaje “STO”” (P0A.02) se
activa el estado interno VOUT_STO_SSR, “Estado seguro alcanzado”.
A partir de la solicitud de la función de seguridad STO transcurren los tiempos siguientes hasta que se
activa la función se seguridad:
Tiempos de retardo a partir de VIN_STO_RSF Mínimo Máximo Típico
VOUT_STO_SFR 2,0 ms 2,1 ms 2,0 ms
VOUT_STO_SSR 2,0 ms + P0A.02 2,1 ms + P0A.02 2,0 ms + P0A.02
Tiempo de respuesta hasta la desconexión de
la alimentación del excitador de unidad
básica y paso de salida DESCONECTADO
2,5 ms 4,5 ms 3,5 ms
Tab. 2.29 Tiempos de retardo STO
Parámetros para STO
STO: Desconexión segura del parN.º Nombre Descripción
P0A.02 Tiempo de retardo hasta el
mensaje “STO”
Tiempo de retardo hasta que se activa la salida
“Estado seguro alcanzado”.
P0A.00 Rearranque automático permitido Si está activado: Anulación de la solicitud
(rearranque) con la entrada de solicitud desactivada
P0A.01 Activación automática SBC Si está activado: Al alcanzar el estado seguro (una
vez transcurrido el tiempo de retardo) se activa el
control seguro de freno.
Tab. 2.30 STO: Desconexión segura del par
2.5.2 SBC – Control seguro de freno (Safe Brake Control)
Aplicación
La función descrita aquí pone en práctica la función de seguridad SBO conforme a
EN 61800-5-2.
Utilice la función “Control seguro de freno” (“Safe Brake Control”, SBC) para controlar
una unidad de bloqueo o un freno de sostenimiento, para frenar mecánicamente un eje
de modo expreso o para retenerlo de modo seguro.
El control de la unidad de bloqueo o del freno de sostenimiento puede controlarse
opcionalmente a través de:
– la salida de freno segura [X6] en el controlador de motor,
– una salida segura del módulo de seguridad y un aparato de conexión de freno externo.
2 Descripción del producto Módulo de seguridad CAMC-G-S3
70 Festo – GDCP-CAMC-G-S3-ES – 1406NH – Español
Importante: Para utilizar la función de seguridad SBC debe utilizarse una unidad de
bloqueo o un freno de sostenimiento con la clasificación de seguridad correspondiente.
En principio, para todos los tipos de unidades de bloqueo sin certificación debe realizarse
siempre una evaluación de riesgos y determinar la idoneidad para la aplicación orientada
a la seguridad en cuestión. De no ser así, estos no se deben utilizar.
noEl freno de sostenimiento en motores en general no cuenta con la debida cualificación.
La función SBC está activada a través del ajuste de fábrica (parametrización previa).
Mientras esta función sea utilizada por otras funciones (solicitud mediante STO, por
medio de otras parametrizaciones o por reacción ante errores en caso de vulneración de
otras funciones de seguridad solicitadas), nunca se puede anular su selección.
Función
La función “Safe Brake Control” desconecta la tensión para una unidad de bloqueo o un freno de
sostenimiento inmediatamente. La unidad de bloqueo o el freno de sostenimiento actúa y frena el
motor o el eje. De este modo se frenan mecánicamente los movimientos peligrosos. El tiempo de
frenado depende de la velocidad con que interviene el freno y de la magnitud de la energía en el
sistema.
NotaEn caso de cargas en suspensión, en general tiene lugar una caída repentina cuando se
solicitan simultáneamente las funciones SBC y STO. Esto se debe a la inercia mecánica
de la unidad de bloqueo o del freno de sostenimiento, y por lo tanto es inevitable.
El módulo de seguridad también pone a disposición la función de seguridad SS1 en
combinación con SBC o la función de seguridad SS2. Compruebe si dichas funciones de
seguridad se pueden o deben utilizar en su aplicación con SBC en lugar de con STO.
El control seguro de freno se puede utilizar exclusivamente en unidades de bloqueo o frenos de
sostenimiento que intervienen en estado sin corriente. La apertura de la unidad de bloqueo o del freno
de sostenimiento tiene lugar entonces a través del suministro de energía.
Si se utiliza la salida de freno de la unidad básica, asegúrese de que los cables están tendidos con
protección. Si la capacidad de carga de las salidas seguras del módulo de seguridad es suficiente, es
posible una detección de circuito cruzado con pulsos de prueba.
La lógica para la demanda de la función de seguridad SBC está representada en el siguiente diagrama
de bloques:
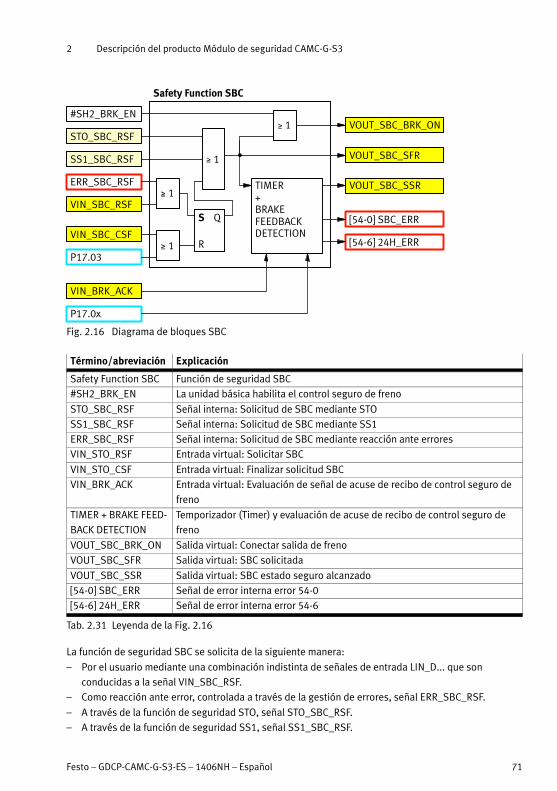
2 Descripción del producto Módulo de seguridad CAMC-G-S3
Festo – GDCP-CAMC-G-S3-ES – 1406NH – Español 71
Safety Function SBC
TIMER+ BRAKE FEEDBACKDETECTION
1
1
1
S
R
Q
VIN_BRK_ACK
STO_SBC_RSF
SS1_SBC_RSF
ERR_SBC_RSF
VIN_SBC_RSF
VIN_SBC_CSF
P17.03
P17.0x
VOUT_SBC_SFR
VOUT_SBC_SSR
[54-0] SBC_ERR
VOUT_SBC_BRK_ON
[54-6] 24H_ERR
#SH2_BRK_EN1
Fig. 2.16 Diagrama de bloques SBC
Término/abreviación Explicación
Safety Function SBC Función de seguridad SBC
#SH2_BRK_EN La unidad básica habilita el control seguro de freno
STO_SBC_RSF Señal interna: Solicitud de SBC mediante STO
SS1_SBC_RSF Señal interna: Solicitud de SBC mediante SS1
ERR_SBC_RSF Señal interna: Solicitud de SBC mediante reacción ante errores
VIN_STO_RSF Entrada virtual: Solicitar SBC
VIN_STO_CSF Entrada virtual: Finalizar solicitud SBC
VIN_BRK_ACK Entrada virtual: Evaluación de señal de acuse de recibo de control seguro de
freno
TIMER + BRAKE FEED
BACK DETECTION
Temporizador (Timer) y evaluación de acuse de recibo de control seguro de
freno
VOUT_SBC_BRK_ON Salida virtual: Conectar salida de freno
VOUT_SBC_SFR Salida virtual: SBC solicitada
VOUT_SBC_SSR Salida virtual: SBC estado seguro alcanzado
[54-0] SBC_ERR Señal de error interna error 54-0
[54-6] 24H_ERR Señal de error interna error 54-6
Tab. 2.31 Leyenda de la Fig. 2.16
La función de seguridad SBC se solicita de la siguiente manera:
– Por el usuario mediante una combinación indistinta de señales de entrada LIN_D... que son
conducidas a la señal VIN_SBC_RSF.
– Como reacción ante error, controlada a través de la gestión de errores, señal ERR_SBC_RSF.
– A través de la función de seguridad STO, señal STO_SBC_RSF.
– A través de la función de seguridad SS1, señal SS1_SBC_RSF.
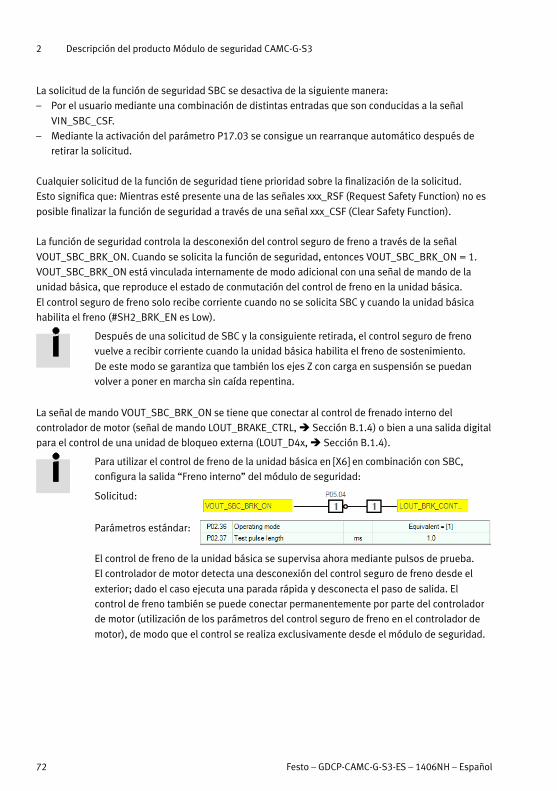
2 Descripción del producto Módulo de seguridad CAMC-G-S3
72 Festo – GDCP-CAMC-G-S3-ES – 1406NH – Español
La solicitud de la función de seguridad SBC se desactiva de la siguiente manera:
– Por el usuario mediante una combinación de distintas entradas que son conducidas a la señal
VIN_SBC_CSF.
– Mediante la activación del parámetro P17.03 se consigue un rearranque automático después de
retirar la solicitud.
Cualquier solicitud de la función de seguridad tiene prioridad sobre la finalización de la solicitud.
Esto significa que: Mientras esté presente una de las señales xxx_RSF (Request Safety Function) no es
posible finalizar la función de seguridad a través de una señal xxx_CSF (Clear Safety Function).
La función de seguridad controla la desconexión del control seguro de freno a través de la señal
VOUT_SBC_BRK_ON. Cuando se solicita la función de seguridad, entonces VOUT_SBC_BRK_ON = 1.
VOUT_SBC_BRK_ON está vinculada internamente de modo adicional con una señal de mando de la
unidad básica, que reproduce el estado de conmutación del control de freno en la unidad básica.
El control seguro de freno solo recibe corriente cuando no se solicita SBC y cuando la unidad básica
habilita el freno (#SH2_BRK_EN es Low).
Después de una solicitud de SBC y la consiguiente retirada, el control seguro de freno
vuelve a recibir corriente cuando la unidad básica habilita el freno de sostenimiento.
De este modo se garantiza que también los ejes Z con carga en suspensión se puedan
volver a poner en marcha sin caída repentina.
La señal de mando VOUT_SBC_BRK_ON se tiene que conectar al control de frenado interno del
controlador de motor (señal de mando LOUT_BRAKE_CTRL, � Sección B.1.4) o bien a una salida digital
para el control de una unidad de bloqueo externa (LOUT_D4x, � Sección B.1.4).
Para utilizar el control de freno de la unidad básica en [X6] en combinación con SBC,
configura la salida “Freno interno” del módulo de seguridad:
Solicitud:
Parámetros estándar:
El control de freno de la unidad básica se supervisa ahora mediante pulsos de prueba.
El controlador de motor detecta una desconexión del control seguro de freno desde el
exterior; dado el caso ejecuta una parada rápida y desconecta el paso de salida. El
control de freno también se puede conectar permanentemente por parte del controlador
de motor (utilización de los parámetros del control seguro de freno en el controlador de
motor), de modo que el control se realiza exclusivamente desde el módulo de seguridad.
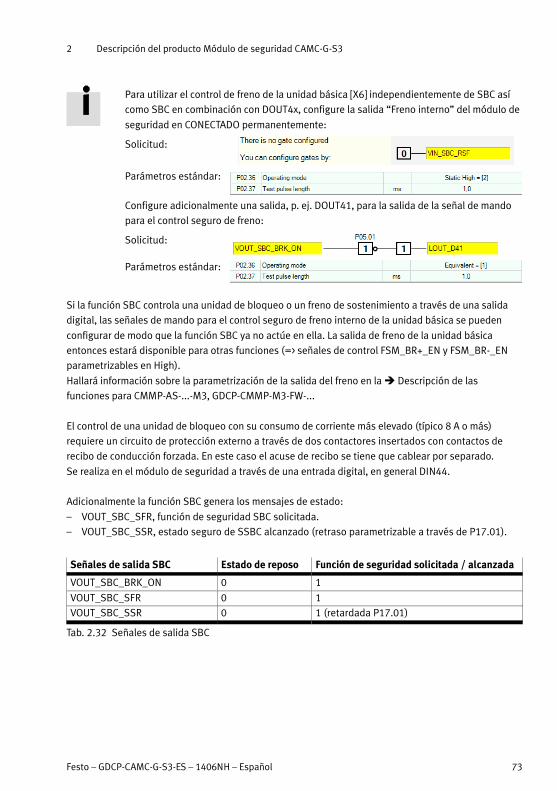
2 Descripción del producto Módulo de seguridad CAMC-G-S3
Festo – GDCP-CAMC-G-S3-ES – 1406NH – Español 73
Para utilizar el control de freno de la unidad básica [X6] independientemente de SBC así
como SBC en combinación con DOUT4x, configure la salida “Freno interno” del módulo de
seguridad en CONECTADO permanentemente:
Solicitud:
Parámetros estándar:
Configure adicionalmente una salida, p. ej. DOUT41, para la salida de la señal de mando
para el control seguro de freno:
Solicitud:
Parámetros estándar:
Si la función SBC controla una unidad de bloqueo o un freno de sostenimiento a través de una salida
digital, las señales de mando para el control seguro de freno interno de la unidad básica se pueden
configurar de modo que la función SBC ya no actúe en ella. La salida de freno de la unidad básica
entonces estará disponible para otras funciones (=> señales de control FSM_BR+_EN y FSM_BR-_EN
parametrizables en High).
Hallará información sobre la parametrización de la salida del freno en la � Descripción de las
funciones para CMMP-AS-...-M3, GDCP-CMMP-M3-FW-...
El control de una unidad de bloqueo con su consumo de corriente más elevado (típico 8 A o más)
requiere un circuito de protección externo a través de dos contactores insertados con contactos de
recibo de conducción forzada. En este caso el acuse de recibo se tiene que cablear por separado.
Se realiza en el módulo de seguridad a través de una entrada digital, en general DIN44.
Adicionalmente la función SBC genera los mensajes de estado:
– VOUT_SBC_SFR, función de seguridad SBC solicitada.
– VOUT_SBC_SSR, estado seguro de SSBC alcanzado (retraso parametrizable a través de P17.01).
Señales de salida SBC Estado de reposo Función de seguridad solicitada / alcanzada
VOUT_SBC_BRK_ON 0 1
VOUT_SBC_SFR 0 1
VOUT_SBC_SSR 0 1 (retardada P17.01)
Tab. 2.32 Señales de salida SBC
2 Descripción del producto Módulo de seguridad CAMC-G-S3
74 Festo – GDCP-CAMC-G-S3-ES – 1406NH – Español
Detección de errores:La función de seguridad puede evaluar una señal de acuse de recibo externa y así controlar que la unidad de
bloqueo o el freno de sostenimiento realmente se hayan aplicado. La evaluación se lleva a cabo a través de
la entrada VIN_BRK_ACK, cuando esta función se activa a través del parámetro P17.02.
A través del parámetro P17.00 se puede parametrizar un tiempo de retardo para el acuse de recibo.
La señal de acuse de recibo se evalúa una vez finalizado el retardo. Si no hay ningún acuse de recibo se
genera el mensaje de error [54-0] SBC_ERR.
NotaLa entrada de acuse de recibo VIN_BRK_ACK, si se utiliza la salida de freno en [X6], se
puede conectar a la entrada de acuse de recibo de la unidad básica (señal
LIN_BRAKE_X6_FB). Esta señal representa el estado de conmutación de la salida
segura de freno en la unidad básica.
Si en la salida de freno [X6] hay un cable de motor conectado, pero ninguna unidad de
bloqueo ni freno de sostenimiento, pueden darse perturbaciones por acoplamiento en
el cable de freno abierto y, por lo tanto, un acuse de recibo incorrecto (error [54-0]).
� En este caso se tiene que desactivar la entrada de acuse de recibo.
NotaLa entrada de acuse de recibo VIN_BRK_ACK tiene que asignarse (mapping) a una
entrada digital segura en caso de utilizar una unidad de bloqueo externa.
Solo se supervisa el estado “Freno aplicado” (supervisión de nivel de VIN_BRK_ACK).
En caso de “freno alimentado” no tiene lugar una supervisión del acuse de recibo.
Además, la función SBC posee una supervisión de tiempo integrada:
La función SBC se puede solicitar como máximo para 24 h. Por ello, la unidad de bloqueo o el freno de
sostenimiento tienen que conectarse (presurizarse) al menos una vez dentro de 24 h, puesto que los
disyuntores solo se pueden comprobar mediante pulsos de prueba cuando están conectados.
Si se sobrepasa el límite de tiempo se genera el error [54-6] 24H_ERR.
La limitación de tiempo se suprime cuando se utiliza la función SBC en combinación con una salida
segura (DOUT40 … DOUT42) o si el freno de sostenimiento no se utiliza orientado a la seguridad. La
supervisión de 24 h se puede desactivar entonces mediante el parámetro avanzado P17.04.
NotaEn el estado de entrega del módulo de seguridad, la función SBC en combinación con la
salida [X6] siempre está configurada, incluso si no se desea utilizar la función SBC. En
aplicaciones en las que los cables de control de freno se conducen en el cable del
motor, si no hay ningún freno de sostenimiento conectado en el lado de motor puede
haber perturbaciones de acoplamiento en los cables abiertos de frenos, de manera que
el módulo de seguridad comunica el error 57-0.
� En tales casos se deben fijar los cables de control de freno a X6 y conectarlas a PE.
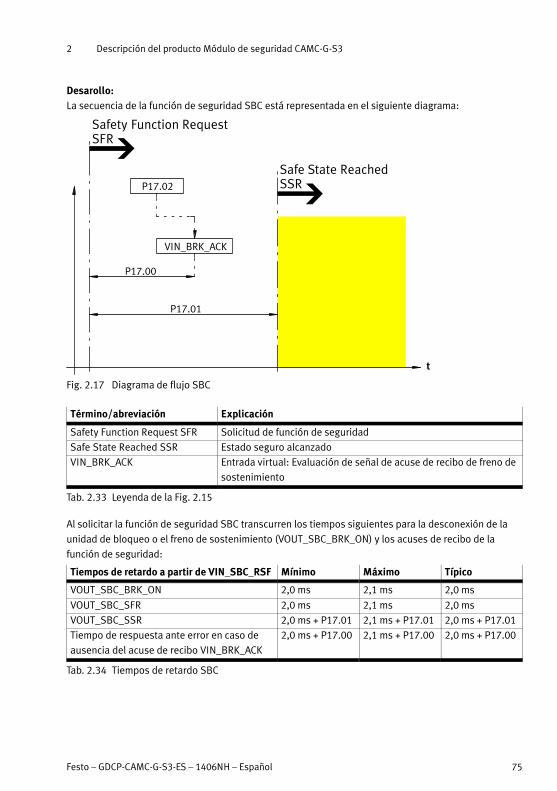
2 Descripción del producto Módulo de seguridad CAMC-G-S3
Festo – GDCP-CAMC-G-S3-ES – 1406NH – Español 75
Desarollo:La secuencia de la función de seguridad SBC está representada en el siguiente diagrama:
Safety Function RequestSFR
P17.00
t
Safe State ReachedSSR
P17.01
P17.02
VIN_BRK_ACK
Fig. 2.17 Diagrama de flujo SBC
Término/abreviación Explicación
Safety Function Request SFR Solicitud de función de seguridad
Safe State Reached SSR Estado seguro alcanzado
VIN_BRK_ACK Entrada virtual: Evaluación de señal de acuse de recibo de freno de
sostenimiento
Tab. 2.33 Leyenda de la Fig. 2.15
Al solicitar la función de seguridad SBC transcurren los tiempos siguientes para la desconexión de la
unidad de bloqueo o el freno de sostenimiento (VOUT_SBC_BRK_ON) y los acuses de recibo de la
función de seguridad:
Tiempos de retardo a partir de VIN_SBC_RSF Mínimo Máximo Típico
VOUT_SBC_BRK_ON 2,0 ms 2,1 ms 2,0 ms
VOUT_SBC_SFR 2,0 ms 2,1 ms 2,0 ms
VOUT_SBC_SSR 2,0 ms + P17.01 2,1 ms + P17.01 2,0 ms + P17.01
Tiempo de respuesta ante error en caso de
ausencia del acuse de recibo VIN_BRK_ACK
2,0 ms + P17.00 2,1 ms + P17.00 2,0 ms + P17.00
Tab. 2.34 Tiempos de retardo SBC
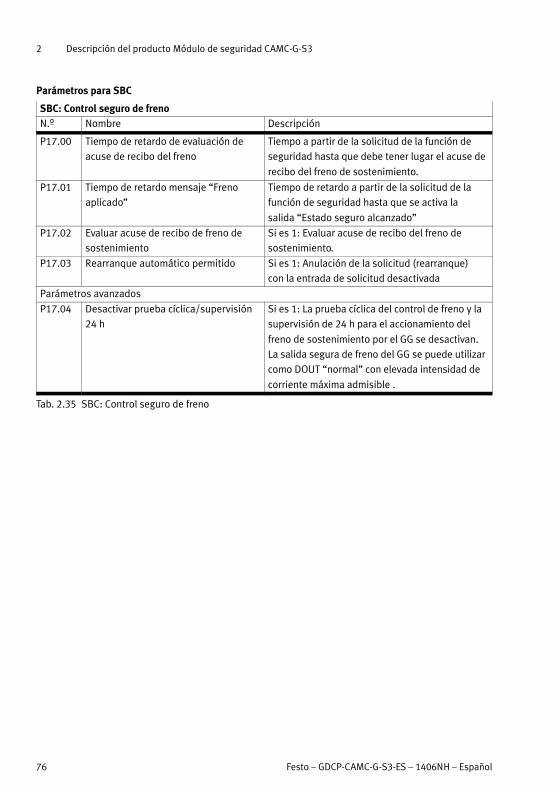
2 Descripción del producto Módulo de seguridad CAMC-G-S3
76 Festo – GDCP-CAMC-G-S3-ES – 1406NH – Español
Parámetros para SBC
SBC: Control seguro de frenoN.º Nombre Descripción
P17.00 Tiempo de retardo de evaluación de
acuse de recibo del freno
Tiempo a partir de la solicitud de la función de
seguridad hasta que debe tener lugar el acuse de
recibo del freno de sostenimiento.
P17.01 Tiempo de retardo mensaje “Freno
aplicado”
Tiempo de retardo a partir de la solicitud de la
función de seguridad hasta que se activa la
salida “Estado seguro alcanzado”
P17.02 Evaluar acuse de recibo de freno de
sostenimiento
Si es 1: Evaluar acuse de recibo del freno de
sostenimiento.
P17.03 Rearranque automático permitido Si es 1: Anulación de la solicitud (rearranque)
con la entrada de solicitud desactivada
Parámetros avanzados
P17.04 Desactivar prueba cíclica/supervisión
24 h
Si es 1: La prueba cíclica del control de freno y la
supervisión de 24 h para el accionamiento del
freno de sostenimiento por el GG se desactivan.
La salida segura de freno del GG se puede utilizar
como DOUT “normal” con elevada intensidad de
corriente máxima admisible .
Tab. 2.35 SBC: Control seguro de freno
2 Descripción del producto Módulo de seguridad CAMC-G-S3
Festo – GDCP-CAMC-G-S3-ES – 1406NH – Español 77
2.5.3 SS1 – Parada segura 1 (Safe Stop 1)
Aplicación
La función descrita aquí pone en práctica la función de seguridad SS1 conforme a
EN 61800-5-2.
Utilice la función de parada segura 1 (“Safe Stop 1”, SS1), si en su aplicación tiene que
frenar el motor y después desconectar de forma segura la alimentación de energía al
mismo, pero no existen más solicitudes de una parada expresa del actuador (comp.
categoría de parada 1 de EN 60204-1).
Se admiten los tres atributos descritos en la norma:
a) Generar y bloquear la magnitud de la deceleración del motor dentro de límites fijados
y activar la función STO cuando las revoluciones del motor descienden por debajo de
un valor límite predeterminado.
� El actuador es guiado en una rampa de frenado hasta la detección del estado de
reposo (P06.09) y después se desconecta el paso de salida.
b) Generar y supervisar la magnitud de la deceleración del motor dentro de límites
fijados y activar la función STO cuando las revoluciones del motor descienden por
debajo de un valor límite predeterminado.
� El módulo de seguridad activa una parada rápida en la unidad básica, se supervisa
la rampa de frenado y después se desconecta el paso de salida.
c) Activación de la deceleración del motor y, después de un retardo de tiempo específico
del usuario, activación de la función STO.
� El módulo de seguridad suministra un mensaje de estado, el control funcional tiene
que frenar la unidad básica y, tras un tiempo de espera, se desconecta el paso de
salida.
La función SS1 está activada a través del ajuste de fábrica (parametrización previa).
Mientras esta función sea utilizada por otras funciones (reacción ante errores en caso de
vulneración de otras funciones de seguridad solicitadas), nunca se puede anular su selección.
FunciónAl solicitar la función de seguridad SS1, esta controla que el actuador sea frenado hasta el estado de
reposo dentro de un tiempo definido en base a una rampa de frenado definida. Una vez transcurrido el
tiempo definido, se activa la función STO y el paso de salida de potencia se desconecta de modo
seguro.
NotaEn caso de cargas en suspensión, en general tiene lugar una caída repentina cuando se
solicita la función STO inmediatamente después de la ejecución de la rampa de frenado.
Por ello la función SS1 también puede activar la función SBC, de modo que se aplica
una unidad de bloqueo o freno de sostenimiento y se evita una caída repentina del eje.
SBC activa a su vez la función STO (encadenamiento de las funciones de seguridad
SS1 } SBC } STO).
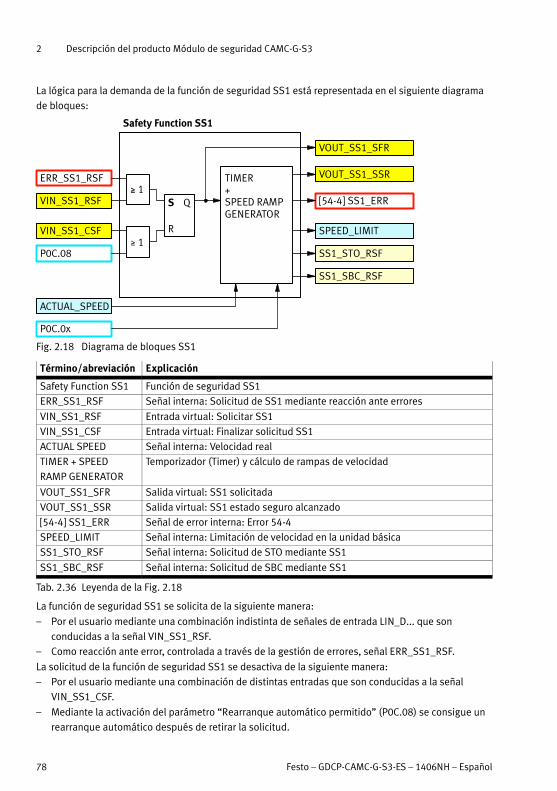
2 Descripción del producto Módulo de seguridad CAMC-G-S3
78 Festo – GDCP-CAMC-G-S3-ES – 1406NH – Español
La lógica para la demanda de la función de seguridad SS1 está representada en el siguiente diagrama
de bloques:
Safety Function SS1
TIMER+ SPEED RAMPGENERATOR
1
1S
R
Q
VOUT_SS1_SFR
VOUT_SS1_SSR
[54-4] SS1_ERR
SPEED_LIMIT
SS1_STO_RSF
SS1_SBC_RSF
ERR_SS1_RSF
VIN_SS1_RSF
VIN_SS1_CSF
P0C.08
P0C.0x
ACTUAL_SPEED
Fig. 2.18 Diagrama de bloques SS1
Término/abreviación Explicación
Safety Function SS1 Función de seguridad SS1
ERR_SS1_RSF Señal interna: Solicitud de SS1 mediante reacción ante errores
VIN_SS1_RSF Entrada virtual: Solicitar SS1
VIN_SS1_CSF Entrada virtual: Finalizar solicitud SS1
ACTUAL SPEED Señal interna: Velocidad real
TIMER + SPEED
RAMP GENERATOR
Temporizador (Timer) y cálculo de rampas de velocidad
VOUT_SS1_SFR Salida virtual: SS1 solicitada
VOUT_SS1_SSR Salida virtual: SS1 estado seguro alcanzado
[54-4] SS1_ERR Señal de error interna: Error 54-4
SPEED_LIMIT Señal interna: Limitación de velocidad en la unidad básica
SS1_STO_RSF Señal interna: Solicitud de STO mediante SS1
SS1_SBC_RSF Señal interna: Solicitud de SBC mediante SS1
Tab. 2.36 Leyenda de la Fig. 2.18
La función de seguridad SS1 se solicita de la siguiente manera:
– Por el usuario mediante una combinación indistinta de señales de entrada LIN_D... que son
conducidas a la señal VIN_SS1_RSF.
– Como reacción ante error, controlada a través de la gestión de errores, señal ERR_SS1_RSF.
La solicitud de la función de seguridad SS1 se desactiva de la siguiente manera:
– Por el usuario mediante una combinación de distintas entradas que son conducidas a la señal
VIN_SS1_CSF.
– Mediante la activación del parámetro “Rearranque automático permitido” (P0C.08) se consigue un
rearranque automático después de retirar la solicitud.
2 Descripción del producto Módulo de seguridad CAMC-G-S3
Festo – GDCP-CAMC-G-S3-ES – 1406NH – Español 79
Cualquier solicitud de la función de seguridad tiene prioridad sobre la finalización de la solicitud.
Esto significa que: Mientras esté presente una de las señales xxx_RSF (Request Safety Function) no es
posible finalizar la función de seguridad a través de una señal xxx_CSF (Clear Safety Function).
La función de seguridad controla directamente las siguientes funciones de seguridad:
– STO a través de la señal SS1_STO_SFR.
– STO a través de la señal SS1_SBC_SFR.
Al finalizar la solicitud de la función SS1 finalizan también directa y automáticamente las siguientes
funciones de seguridad.
Además, la función SS1 también suministra algunas señales de mando para el control de la unidad
básica:
– Limitaciones para la velocidad en la unidad básica, SPEED_LIMIT.
– Una señal de mando para activar la rampa de parada rápida en la unidad básica (no representada
en el diagrama de bloques).
Adicionalmente la función SS1 genera los mensajes de estado:
– VOUT_SS1_SFR, función de seguridad SS1 solicitada.
– VOUT_SS1_SSR, estado seguro SS1 alcanzado
Señales de salida SS1 Estado de reposo Función de seguridad solicitada / alcanzada
VOUT_SS1_SFR 0 1
VOUT_SS1_SSR 0 1 (retardo mediante P0C.01 + P0C.0C + P0C.0B)
Tab. 2.37 Señales de salida SS1
Detección de errores
La función de seguridad compara cíclicamente la velocidad real (ACTUAL_SPEED) con la rampa de
velocidad calculada. Si la velocidad real para un tiempo parametrizado “Tiempo tolerado en caso de
sobrepasar el valor límite” (P0C.02) se encuentra fuera del margen de velocidad permitido, se genera el
error [54-4] SS1_ERR.
El estado “Condición de seguridad vulnerada” no se retira en SS1 si el actuador se encuentra de nuevo
en el margen permitido después de una vulneración temporal.
En caso de vulneración de la condición de seguridad, la norma EN 61800-5-2 requiere
“STO” como reacción ante error. No obstante, en algunas aplicaciones también pueden
ser convenientes otras reacciones ante error, p. ej. “STO + SBC” � Sección 2.8.2.
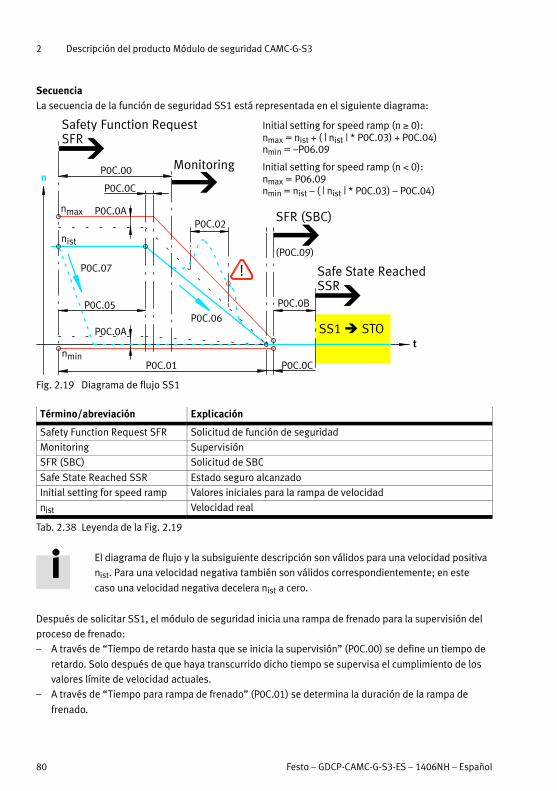
2 Descripción del producto Módulo de seguridad CAMC-G-S3
80 Festo – GDCP-CAMC-G-S3-ES – 1406NH – Español
SecuenciaLa secuencia de la función de seguridad SS1 está representada en el siguiente diagrama:
Safety Function RequestSFR
P0C.05
P0C.00
P0C.01
n
t
nmax
nmin
nist
P0C.07 Safe State ReachedSSR
P0C.02
Monitoring
P0C.0A
P0C.0A
SS1 � STO
SFR (SBC)
P0C.0B
(P0C.09)
P0C.06
Initial setting for speed ramp (n 0):nmax = nist + ( | nist | * P0C.03) + P0C.04)nmin = –P06.09
P0C.0C
P0C.0C
Initial setting for speed ramp (n 0):nmax = P06.09nmin = nist – ( | nist | * P0C.03) – P0C.04)
Fig. 2.19 Diagrama de flujo SS1
Término/abreviación Explicación
Safety Function Request SFR Solicitud de función de seguridad
Monitoring Supervisión
SFR (SBC) Solicitud de SBC
Safe State Reached SSR Estado seguro alcanzado
Initial setting for speed ramp Valores iniciales para la rampa de velocidad
nist Velocidad real
Tab. 2.38 Leyenda de la Fig. 2.19
El diagrama de flujo y la subsiguiente descripción son válidos para una velocidad positiva
nist. Para una velocidad negativa también son válidos correspondientemente; en este
caso una velocidad negativa decelera nist a cero.
Después de solicitar SS1, el módulo de seguridad inicia una rampa de frenado para la supervisión del
proceso de frenado:
– A través de “Tiempo de retardo hasta que se inicia la supervisión” (P0C.00) se define un tiempo de
retardo. Solo después de que haya transcurrido dicho tiempo se supervisa el cumplimiento de los
valores límite de velocidad actuales.
– A través de “Tiempo para rampa de frenado” (P0C.01) se determina la duración de la rampa de
frenado.
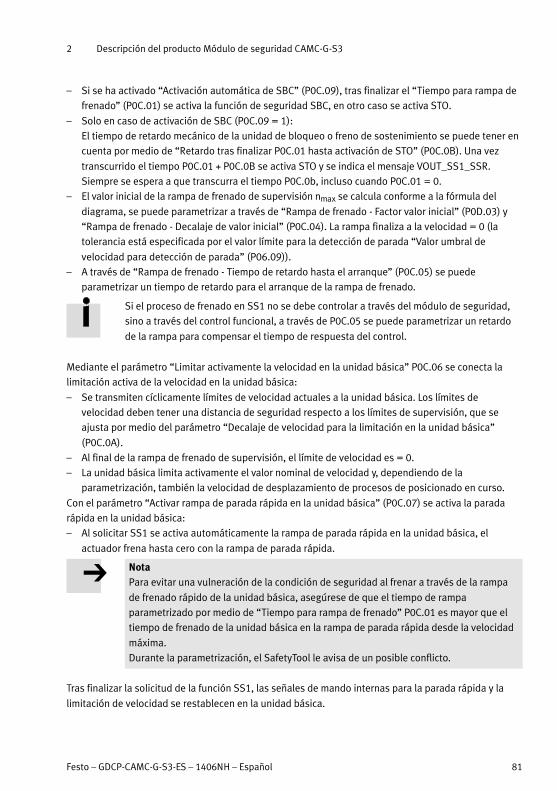
2 Descripción del producto Módulo de seguridad CAMC-G-S3
Festo – GDCP-CAMC-G-S3-ES – 1406NH – Español 81
– Si se ha activado “Activación automática de SBC” (P0C.09), tras finalizar el “Tiempo para rampa de
frenado” (P0C.01) se activa la función de seguridad SBC, en otro caso se activa STO.
– Solo en caso de activación de SBC (P0C.09 = 1):
El tiempo de retardo mecánico de la unidad de bloqueo o freno de sostenimiento se puede tener en
cuenta por medio de “Retardo tras finalizar P0C.01 hasta activación de STO” (P0C.0B). Una vez
transcurrido el tiempo P0C.01 + P0C.0B se activa STO y se indica el mensaje VOUT_SS1_SSR.
Siempre se espera a que transcurra el tiempo P0C.0b, incluso cuando P0C.01 = 0.
– El valor inicial de la rampa de frenado de supervisión nmax se calcula conforme a la fórmula del
diagrama, se puede parametrizar a través de “Rampa de frenado - Factor valor inicial” (P0D.03) y
“Rampa de frenado - Decalaje de valor inicial” (P0C.04). La rampa finaliza a la velocidad = 0 (la
tolerancia está especificada por el valor límite para la detección de parada “Valor umbral de
velocidad para detección de parada” (P06.09)).
– A través de “Rampa de frenado - Tiempo de retardo hasta el arranque” (P0C.05) se puede
parametrizar un tiempo de retardo para el arranque de la rampa de frenado.
Si el proceso de frenado en SS1 no se debe controlar a través del módulo de seguridad,
sino a través del control funcional, a través de P0C.05 se puede parametrizar un retardo
de la rampa para compensar el tiempo de respuesta del control.
Mediante el parámetro “Limitar activamente la velocidad en la unidad básica” P0C.06 se conecta la
limitación activa de la velocidad en la unidad básica:
– Se transmiten cíclicamente límites de velocidad actuales a la unidad básica. Los límites de
velocidad deben tener una distancia de seguridad respecto a los límites de supervisión, que se
ajusta por medio del parámetro “Decalaje de velocidad para la limitación en la unidad básica”
(P0C.0A).
– Al final de la rampa de frenado de supervisión, el límite de velocidad es = 0.
– La unidad básica limita activamente el valor nominal de velocidad y, dependiendo de la
parametrización, también la velocidad de desplazamiento de procesos de posicionado en curso.
Con el parámetro “Activar rampa de parada rápida en la unidad básica” (P0C.07) se activa la parada
rápida en la unidad básica:
– Al solicitar SS1 se activa automáticamente la rampa de parada rápida en la unidad básica, el
actuador frena hasta cero con la rampa de parada rápida.
NotaPara evitar una vulneración de la condición de seguridad al frenar a través de la rampa
de frenado rápido de la unidad básica, asegúrese de que el tiempo de rampa
parametrizado por medio de “Tiempo para rampa de frenado” P0C.01 es mayor que el
tiempo de frenado de la unidad básica en la rampa de parada rápida desde la velocidad
máxima.
Durante la parametrización, el SafetyTool le avisa de un posible conflicto.
Tras finalizar la solicitud de la función SS1, las señales de mando internas para la parada rápida y la
limitación de velocidad se restablecen en la unidad básica.
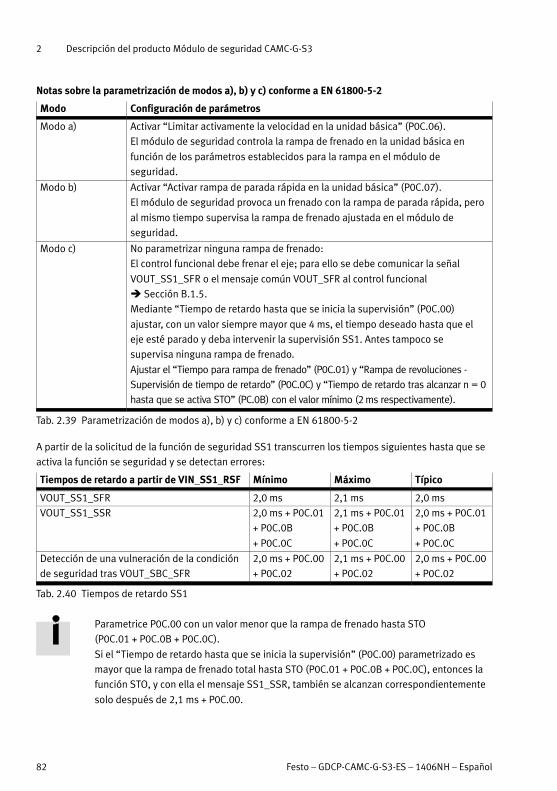
2 Descripción del producto Módulo de seguridad CAMC-G-S3
82 Festo – GDCP-CAMC-G-S3-ES – 1406NH – Español
Notas sobre la parametrización de modos a), b) y c) conforme a EN 61800-5-2
Modo Configuración de parámetros
Modo a) Activar “Limitar activamente la velocidad en la unidad básica” (P0C.06).
El módulo de seguridad controla la rampa de frenado en la unidad básica en
función de los parámetros establecidos para la rampa en el módulo de
seguridad.
Modo b) Activar “Activar rampa de parada rápida en la unidad básica” (P0C.07).
El módulo de seguridad provoca un frenado con la rampa de parada rápida, pero
al mismo tiempo supervisa la rampa de frenado ajustada en el módulo de
seguridad.
Modo c) No parametrizar ninguna rampa de frenado:
El control funcional debe frenar el eje; para ello se debe comunicar la señal
VOUT_SS1_SFR o el mensaje común VOUT_SFR al control funcional
� Sección B.1.5.
Mediante “Tiempo de retardo hasta que se inicia la supervisión” (P0C.00)
ajustar, con un valor siempre mayor que 4 ms, el tiempo deseado hasta que el
eje esté parado y deba intervenir la supervisión SS1. Antes tampoco se
supervisa ninguna rampa de frenado.
Ajustar el “Tiempo para rampa de frenado” (P0C.01) y “Rampa de revoluciones -
Supervisión de tiempo de retardo” (P0C.0C) y “Tiempo de retardo tras alcanzar n = 0
hasta que se activa STO” (PC.0B) con el valor mínimo (2 ms respectivamente).
Tab. 2.39 Parametrización de modos a), b) y c) conforme a EN 61800-5-2
A partir de la solicitud de la función de seguridad SS1 transcurren los tiempos siguientes hasta que se
activa la función se seguridad y se detectan errores:
Tiempos de retardo a partir de VIN_SS1_RSF Mínimo Máximo Típico
VOUT_SS1_SFR 2,0 ms 2,1 ms 2,0 ms
VOUT_SS1_SSR 2,0 ms + P0C.01
+ P0C.0B
+ P0C.0C
2,1 ms + P0C.01
+ P0C.0B
+ P0C.0C
2,0 ms + P0C.01
+ P0C.0B
+ P0C.0C
Detección de una vulneración de la condición
de seguridad tras VOUT_SBC_SFR
2,0 ms + P0C.00
+ P0C.02
2,1 ms + P0C.00
+ P0C.02
2,0 ms + P0C.00
+ P0C.02
Tab. 2.40 Tiempos de retardo SS1
Parametrice P0C.00 con un valor menor que la rampa de frenado hasta STO
(P0C.01 + P0C.0B + P0C.0C).
Si el “Tiempo de retardo hasta que se inicia la supervisión” (P0C.00) parametrizado es
mayor que la rampa de frenado total hasta STO (P0C.01 + P0C.0B + P0C.0C), entonces la
función STO, y con ella el mensaje SS1_SSR, también se alcanzan correspondientemente
solo después de 2,1 ms + P0C.00.
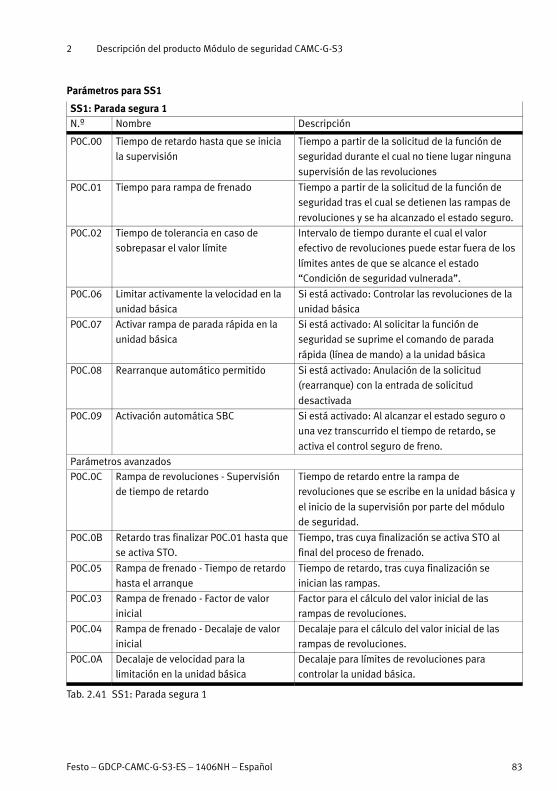
2 Descripción del producto Módulo de seguridad CAMC-G-S3
Festo – GDCP-CAMC-G-S3-ES – 1406NH – Español 83
Parámetros para SS1
SS1: Parada segura 1N.º Nombre Descripción
P0C.00 Tiempo de retardo hasta que se inicia
la supervisión
Tiempo a partir de la solicitud de la función de
seguridad durante el cual no tiene lugar ninguna
supervisión de las revoluciones
P0C.01 Tiempo para rampa de frenado Tiempo a partir de la solicitud de la función de
seguridad tras el cual se detienen las rampas de
revoluciones y se ha alcanzado el estado seguro.
P0C.02 Tiempo de tolerancia en caso de
sobrepasar el valor límite
Intervalo de tiempo durante el cual el valor
efectivo de revoluciones puede estar fuera de los
límites antes de que se alcance el estado
“Condición de seguridad vulnerada”.
P0C.06 Limitar activamente la velocidad en la
unidad básica
Si está activado: Controlar las revoluciones de la
unidad básica
P0C.07 Activar rampa de parada rápida en la
unidad básica
Si está activado: Al solicitar la función de
seguridad se suprime el comando de parada
rápida (línea de mando) a la unidad básica
P0C.08 Rearranque automático permitido Si está activado: Anulación de la solicitud
(rearranque) con la entrada de solicitud
desactivada
P0C.09 Activación automática SBC Si está activado: Al alcanzar el estado seguro o
una vez transcurrido el tiempo de retardo, se
activa el control seguro de freno.
Parámetros avanzados
P0C.0C Rampa de revoluciones - Supervisión
de tiempo de retardo
Tiempo de retardo entre la rampa de
revoluciones que se escribe en la unidad básica y
el inicio de la supervisión por parte del módulo
de seguridad.
P0C.0B Retardo tras finalizar P0C.01 hasta que
se activa STO.
Tiempo, tras cuya finalización se activa STO al
final del proceso de frenado.
P0C.05 Rampa de frenado - Tiempo de retardo
hasta el arranque
Tiempo de retardo, tras cuya finalización se
inician las rampas.
P0C.03 Rampa de frenado - Factor de valor
inicial
Factor para el cálculo del valor inicial de las
rampas de revoluciones.
P0C.04 Rampa de frenado - Decalaje de valor
inicial
Decalaje para el cálculo del valor inicial de las
rampas de revoluciones.
P0C.0A Decalaje de velocidad para la
limitación en la unidad básica
Decalaje para límites de revoluciones para
controlar la unidad básica.
Tab. 2.41 SS1: Parada segura 1
2 Descripción del producto Módulo de seguridad CAMC-G-S3
84 Festo – GDCP-CAMC-G-S3-ES – 1406NH – Español
2.5.4 SS2 – Parada segura 2 (Safe Stop 2)
Aplicación
La función descrita aquí pone en práctica la función de seguridad SS2 conforme a
EN 61800-5-2.
Utilice la función de �parada segura 2” (“Safe Stop 2”, SS2) si en su aplicación se debe
frenar el motor y, después, evitar que este difiera de la posición de parada en más de un
valor determinado (comp. categoría de parada 2 de EN 60204-1).
Se admiten los tres atributos descritos en la norma:
a) Generar y bloquear la magnitud de la deceleración del motor dentro de límites fijados
y activar la función SOS cuando las revoluciones del motor descienden por debajo de
un valor límite predeterminado.
� El actuador es guiado en una rampa de frenado hasta la detección del estado de
reposo (P06.09) y después se ejecuta una parada de funcionamiento segura.
b) Generar y supervisar la magnitud de la deceleración del motor dentro de límites
fijados y activar la función SOS cuando las revoluciones del motor descienden por
debajo de un valor límite predeterminado.
� El módulo de seguridad activa una parada rápida en la unidad básica, se supervisa
la rampa de frenado y después se ejecuta una parada de funcionamiento segura.
c) Activación de la deceleración del motor y, después de un retardo de tiempo específico
del usuario, activación de la función SOS.
� El módulo de seguridad suministra un mensaje de estado, el control funcional tiene
que frenar la unidad básica y, tras un tiempo de espera, se activa la función de
seguridad SOS.
La función SS2 también se puede utilizar como reacción ante errores (en caso de
vulneración de otras funciones de seguridad solicitadas). Para ello tiene que ser activada
y parametrizada.
FunciónAl solicitar la función de seguridad SS2, esta controla que el actuador sea frenado hasta el estado de
reposo dentro de un tiempo definido en base a una rampa de frenado definida. Una vez transcurrido el
tiempo definido, se activa la función SOS y con ella se ejecuta una parada de funcionamiento segura.
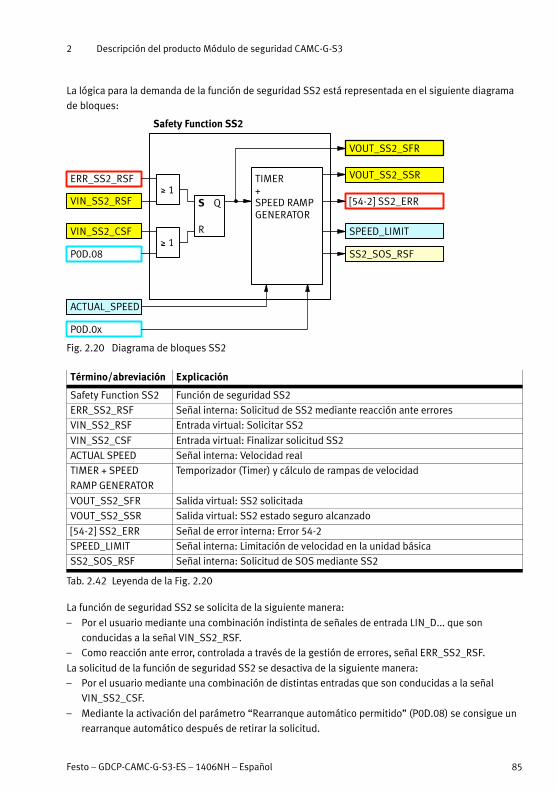
2 Descripción del producto Módulo de seguridad CAMC-G-S3
Festo – GDCP-CAMC-G-S3-ES – 1406NH – Español 85
La lógica para la demanda de la función de seguridad SS2 está representada en el siguiente diagrama
de bloques:
ACTUAL_SPEED
ERR_SS2_RSF
VIN_SS2_RSF
VIN_SS2_CSF
P0D.08
P0D.0x
Safety Function SS2
TIMER+ SPEED RAMPGENERATOR
VOUT_SS2_SFR
VOUT_SS2_SSR
[54-2] SS2_ERR
SPEED_LIMIT
SS2_SOS_RSF1
1S
R
Q
Fig. 2.20 Diagrama de bloques SS2
Término/abreviación Explicación
Safety Function SS2 Función de seguridad SS2
ERR_SS2_RSF Señal interna: Solicitud de SS2 mediante reacción ante errores
VIN_SS2_RSF Entrada virtual: Solicitar SS2
VIN_SS2_CSF Entrada virtual: Finalizar solicitud SS2
ACTUAL SPEED Señal interna: Velocidad real
TIMER + SPEED
RAMP GENERATOR
Temporizador (Timer) y cálculo de rampas de velocidad
VOUT_SS2_SFR Salida virtual: SS2 solicitada
VOUT_SS2_SSR Salida virtual: SS2 estado seguro alcanzado
[54-2] SS2_ERR Señal de error interna: Error 54-2
SPEED_LIMIT Señal interna: Limitación de velocidad en la unidad básica
SS2_SOS_RSF Señal interna: Solicitud de SOS mediante SS2
Tab. 2.42 Leyenda de la Fig. 2.20
La función de seguridad SS2 se solicita de la siguiente manera:
– Por el usuario mediante una combinación indistinta de señales de entrada LIN_D... que son
conducidas a la señal VIN_SS2_RSF.
– Como reacción ante error, controlada a través de la gestión de errores, señal ERR_SS2_RSF.
La solicitud de la función de seguridad SS2 se desactiva de la siguiente manera:
– Por el usuario mediante una combinación de distintas entradas que son conducidas a la señal
VIN_SS2_CSF.
– Mediante la activación del parámetro “Rearranque automático permitido” (P0D.08) se consigue un
rearranque automático después de retirar la solicitud.
2 Descripción del producto Módulo de seguridad CAMC-G-S3
86 Festo – GDCP-CAMC-G-S3-ES – 1406NH – Español
Cualquier solicitud de la función de seguridad tiene prioridad sobre la finalización de la solicitud.
Esto significa que: Mientras esté presente una de las señales xxx_RSF (Request Safety Function) no es
posible finalizar la función de seguridad a través de una señal xxx_CSF (Clear Safety Function).
La función de seguridad controla directamente las siguientes funciones de seguridad:
– SOS a través de la señal SS2_SOS_RSF.
Al finalizar la solicitud de la función SS2 finalizan también directa y automáticamente las siguientes
funciones de seguridad.
Además, la función SS2 también suministra algunas señales de mando para el control de la unidad
básica:
– Limitaciones para la velocidad en la unidad básica, SPEED_LIMIT.
– Una señal de mando para activar la rampa de parada rápida en la unidad básica (no representada
en el diagrama de bloques).
Adicionalmente la función SS2 genera los mensajes de estado:
– VOUT_SS2_SFR, función de seguridad SS2 solicitada.
– VOUT_SS2_SSR, estado seguro SS2 alcanzado
Señales de salida SS2 Estado de reposo Función de seguridad solicitada / alcanzada
VOUT_SS2_SFR 0 1
VOUT_SS2_SSR 0 1 (retardo mediante P0D.01 + P0D.0A)
Tab. 2.43 Señales de salida SS2
Detección de erroresLa función de seguridad compara cíclicamente la velocidad real (ACTUAL_SPEED) con la rampa de
velocidad calculada. Si la velocidad real para un tiempo parametrizado “Tiempo tolerado en caso de
sobrepasar el valor límite” (P0D.02) se encuentra fuera del margen de velocidad permitido, se genera
el error [54-2] SS2_ERR.
El estado “Condición de seguridad vulnerada” no se retira en SS2 si el actuador se encuentra de nuevo
en el margen permitido después de una vulneración temporal.
En cuanto el actuador ha frenado hasta el estado de reposo se solicita la función de seguridad SOS,
que dispone de una detección de errores propia (supervisión de posición).
En caso de vulneración de la condición de seguridad, la norma EN 61800-5-2 requiere
“STO” como reacción ante error. No obstante, en algunas aplicaciones también pueden
ser convenientes otras reacciones ante error, p. ej. “STO + SBC” � Sección 2.8.2.
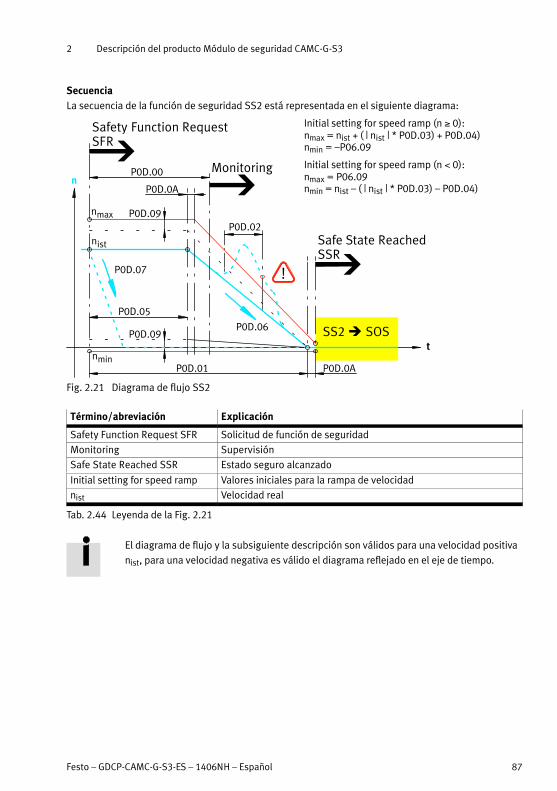
2 Descripción del producto Módulo de seguridad CAMC-G-S3
Festo – GDCP-CAMC-G-S3-ES – 1406NH – Español 87
SecuenciaLa secuencia de la función de seguridad SS2 está representada en el siguiente diagrama:
Safety Function RequestSFR
P0D.05
P0D.00
P0D.01
n
t
nmax
nmin
nist
P0D.07
Safe State ReachedSSR
P0D.02
Monitoring
P0D.09
P0D.09
SS2 � SOSP0D.06
P0D.0A
P0D.0A
Initial setting for speed ramp (n 0):nmax = nist + ( | nist | * P0D.03) + P0D.04)nmin = –P06.09
Initial setting for speed ramp (n 0):nmax = P06.09nmin = nist – ( | nist | * P0D.03) – P0D.04)
Fig. 2.21 Diagrama de flujo SS2
Término/abreviación Explicación
Safety Function Request SFR Solicitud de función de seguridad
Monitoring Supervisión
Safe State Reached SSR Estado seguro alcanzado
Initial setting for speed ramp Valores iniciales para la rampa de velocidad
nist Velocidad real
Tab. 2.44 Leyenda de la Fig. 2.21
El diagrama de flujo y la subsiguiente descripción son válidos para una velocidad positiva
nist, para una velocidad negativa es válido el diagrama reflejado en el eje de tiempo.
2 Descripción del producto Módulo de seguridad CAMC-G-S3
88 Festo – GDCP-CAMC-G-S3-ES – 1406NH – Español
Después de solicitar SS2 el módulo de seguridad inicia una rampa de frenado:
– A través de “Tiempo de retardo hasta que se inicia la supervisión” (P0D.00) se define un tiempo de
retardo. Solo después de que haya transcurrido dicho tiempo se supervisa el cumplimiento de los
valores límite de velocidad actuales.
– A través de “Tiempo para rampa de frenado” (P0D.01) se determina la duración de la rampa de
frenado.
– El valor inicial de la rampa de frenado de supervisión nmax se calcula conforme a la fórmula del
diagrama, se puede parametrizar a través de “Rampa de frenado - Factor valor inicial” (P0D.03)
y “Rampa de frenado - Decalaje de valor inicial” (P0D.04). La rampa finaliza a la velocidad = 0
(la tolerancia está especificada por el valor límite para la detección de parada “Valor umbral de
velocidad para detección de parada” (P06.09)).
– A través de “Rampa de frenado - Tiempo de retardo hasta el arranque” (P0D.05) se puede
parametrizar un tiempo de retardo para el arranque de la rampa de frenado.
Si el proceso de frenado en SS2 no se debe controlar a través del módulo de seguridad,
sino a través del control funcional, a través de P0D.05 se puede parametrizar un retardo
de la rampa para compensar el tiempo de respuesta del control.
Mediante el parámetro “Limitar activamente la velocidad en la unidad básica” P0D.06 se conecta la
limitación activa de la velocidad en la unidad básica:
– Se transmiten cíclicamente límites de velocidad actuales a la unidad básica. Los límites de
velocidad deben tener una distancia de seguridad respecto a los límites de supervisión, que se
ajusta por medio del parámetro “Decalaje de velocidad para la limitación en la unidad básica”
(P0D.09).
– Al final de la rampa de frenado de supervisión, el límite de velocidad es = 0.
– La unidad básica limita activamente el valor nominal de velocidad y, dependiendo de la
parametrización, también la velocidad de desplazamiento de procesos de posicionado en curso.
Con el parámetro “Activar rampa de parada rápida en la unidad básica” (P0D.07) se activa la parada
rápida en la unidad básica:
– Al solicitar SS2 se activa automáticamente la rampa de parada rápida en la unidad básica, el
actuador frena hasta cero con la rampa de parada rápida.
NotaPara evitar una vulneración de la condición de seguridad al frenar a través de la rampa
de frenado rápido de la unidad básica, asegúrese de que el tiempo de rampa
parametrizado con P0D.01 es mayor que el tiempo de frenado de la unidad básica en la
rampa de parada rápida desde la velocidad máxima.
Durante la parametrización, el SafetyTool le avisa de un posible conflicto.
Tras finalizar la solicitud de la función SS2, las señales de mando internas para la parada rápida y la
limitación de velocidad se restablecen en la unidad básica.
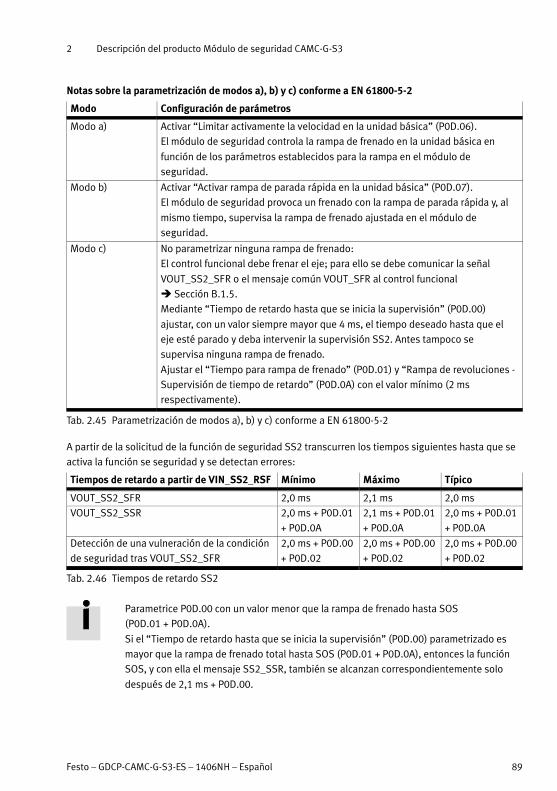
2 Descripción del producto Módulo de seguridad CAMC-G-S3
Festo – GDCP-CAMC-G-S3-ES – 1406NH – Español 89
Notas sobre la parametrización de modos a), b) y c) conforme a EN 61800-5-2
Modo Configuración de parámetros
Modo a) Activar “Limitar activamente la velocidad en la unidad básica” (P0D.06).
El módulo de seguridad controla la rampa de frenado en la unidad básica en
función de los parámetros establecidos para la rampa en el módulo de
seguridad.
Modo b) Activar “Activar rampa de parada rápida en la unidad básica” (P0D.07).
El módulo de seguridad provoca un frenado con la rampa de parada rápida y, al
mismo tiempo, supervisa la rampa de frenado ajustada en el módulo de
seguridad.
Modo c) No parametrizar ninguna rampa de frenado:
El control funcional debe frenar el eje; para ello se debe comunicar la señal
VOUT_SS2_SFR o el mensaje común VOUT_SFR al control funcional
� Sección B.1.5.
Mediante “Tiempo de retardo hasta que se inicia la supervisión” (P0D.00)
ajustar, con un valor siempre mayor que 4 ms, el tiempo deseado hasta que el
eje esté parado y deba intervenir la supervisión SS2. Antes tampoco se
supervisa ninguna rampa de frenado.
Ajustar el “Tiempo para rampa de frenado” (P0D.01) y “Rampa de revoluciones -
Supervisión de tiempo de retardo” (P0D.0A) con el valor mínimo (2 ms
respectivamente).
Tab. 2.45 Parametrización de modos a), b) y c) conforme a EN 61800-5-2
A partir de la solicitud de la función de seguridad SS2 transcurren los tiempos siguientes hasta que se
activa la función se seguridad y se detectan errores:
Tiempos de retardo a partir de VIN_SS2_RSF Mínimo Máximo Típico
VOUT_SS2_SFR 2,0 ms 2,1 ms 2,0 ms
VOUT_SS2_SSR 2,0 ms + P0D.01
+ P0D.0A
2,1 ms + P0D.01
+ P0D.0A
2,0 ms + P0D.01
+ P0D.0A
Detección de una vulneración de la condición
de seguridad tras VOUT_SS2_SFR
2,0 ms + P0D.00
+ P0D.02
2,0 ms + P0D.00
+ P0D.02
2,0 ms + P0D.00
+ P0D.02
Tab. 2.46 Tiempos de retardo SS2
Parametrice P0D.00 con un valor menor que la rampa de frenado hasta SOS
(P0D.01 + P0D.0A).
Si el “Tiempo de retardo hasta que se inicia la supervisión” (P0D.00) parametrizado es
mayor que la rampa de frenado total hasta SOS (P0D.01 + P0D.0A), entonces la función
SOS, y con ella el mensaje SS2_SSR, también se alcanzan correspondientemente solo
después de 2,1 ms + P0D.00.
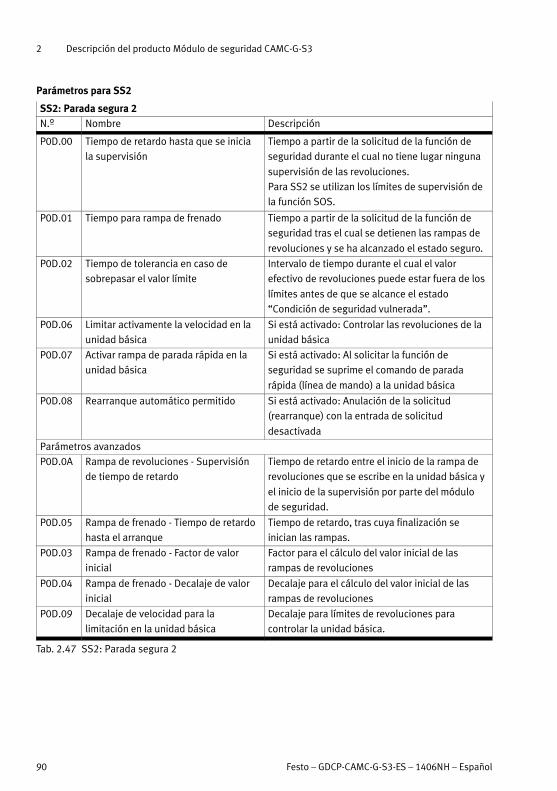
2 Descripción del producto Módulo de seguridad CAMC-G-S3
90 Festo – GDCP-CAMC-G-S3-ES – 1406NH – Español
Parámetros para SS2
SS2: Parada segura 2N.º Nombre Descripción
P0D.00 Tiempo de retardo hasta que se inicia
la supervisión
Tiempo a partir de la solicitud de la función de
seguridad durante el cual no tiene lugar ninguna
supervisión de las revoluciones.
Para SS2 se utilizan los límites de supervisión de
la función SOS.
P0D.01 Tiempo para rampa de frenado Tiempo a partir de la solicitud de la función de
seguridad tras el cual se detienen las rampas de
revoluciones y se ha alcanzado el estado seguro.
P0D.02 Tiempo de tolerancia en caso de
sobrepasar el valor límite
Intervalo de tiempo durante el cual el valor
efectivo de revoluciones puede estar fuera de los
límites antes de que se alcance el estado
“Condición de seguridad vulnerada”.
P0D.06 Limitar activamente la velocidad en la
unidad básica
Si está activado: Controlar las revoluciones de la
unidad básica
P0D.07 Activar rampa de parada rápida en la
unidad básica
Si está activado: Al solicitar la función de
seguridad se suprime el comando de parada
rápida (línea de mando) a la unidad básica
P0D.08 Rearranque automático permitido Si está activado: Anulación de la solicitud
(rearranque) con la entrada de solicitud
desactivada
Parámetros avanzados
P0D.0A Rampa de revoluciones - Supervisión
de tiempo de retardo
Tiempo de retardo entre el inicio de la rampa de
revoluciones que se escribe en la unidad básica y
el inicio de la supervisión por parte del módulo
de seguridad.
P0D.05 Rampa de frenado - Tiempo de retardo
hasta el arranque
Tiempo de retardo, tras cuya finalización se
inician las rampas.
P0D.03 Rampa de frenado - Factor de valor
inicial
Factor para el cálculo del valor inicial de las
rampas de revoluciones
P0D.04 Rampa de frenado - Decalaje de valor
inicial
Decalaje para el cálculo del valor inicial de las
rampas de revoluciones
P0D.09 Decalaje de velocidad para la
limitación en la unidad básica
Decalaje para límites de revoluciones para
controlar la unidad básica.
Tab. 2.47 SS2: Parada segura 2
2 Descripción del producto Módulo de seguridad CAMC-G-S3
Festo – GDCP-CAMC-G-S3-ES – 1406NH – Español 91
2.5.5 SOS – Parada de servicio segura (Safe Operating Stop)
Aplicación
La función descrita aquí pone en práctica la función de seguridad SOS conforme a
EN 61800-5-2.
Utilice la función de parada de servicio segura (“Safe Operating Stop”, SOS) cuando en
su aplicación tenga que garantizar que la posición del motor o del eje se detiene
activamente y a la vez se controla de modo seguro.
La función SOS también es activada por la función SS2 y se puede utilizar como reacción
ante errores (en caso de vulneración de otras funciones de seguridad solicitadas). En este
caso se activa a través de los ajustes de fábrica y en principio no se puede anular su
selección.
FunciónAl solicitar la función de seguridad SOS, esta controla que, tras un tiempo definido, el actuador sea
regulado dentro de una tolerancia de posición predeterminada. Si es necesario, se puede solicitar con
anterioridad una parada rápida en la unidad básica, con la que el actuador frena hasta el estado de
parada. Incluso con la función de seguridad SOS solicitada el motor sigue recibiendo energía, de modo
que puede soportar la aplicación de fuerzas externas. La velocidad se regula a cero en la unidad
básica.
NotaPuesto que las señales del sensor de posición en estado de parada pueden ser
estáticas, p. ej. en caso de señales de pista SEN/COS, la función SOS no se puede
solicitar reiteradamente de forma ilimitada, mientras es necesario que el eje se mueva.
Si se ha solicitado SOS para >24 h se generará el error 54-7.
El tiempo máximo de parada en la función SOS está limitado por tanto a 24 h.

2 Descripción del producto Módulo de seguridad CAMC-G-S3
92 Festo – GDCP-CAMC-G-S3-ES – 1406NH – Español
La lógica para la demanda de la función de seguridad SOS está representada en el siguiente diagrama
de bloques:
Safety Function SOS
TIMER+ POSITIONCOMPARATOR1
1
S
R
Q
SS2_SOS_RSF
VIN_SOS_RSF
VIN_SOS_CSF
P0B.03
P0B.0x
ACTUAL_POSITION
[54-3] SOS_ERR
VOUT_SOS_SFR
VOUT_SOS_SSR
Fig. 2.22 Diagrama de bloques SOS
Término/abreviación Explicación
Safety Function SOS Función de seguridad SOS
VIN_SOS_RSF Entrada virtual: Solicitar SOS
VIN_SOS_CSF Entrada virtual: Finalizar solicitud SOS
ACTUAL POSITION Señal interna: Posición real
TIMER + POSITION
COMPARATOR
Temporizador (Timer) y comparador de posición
VOUT_SOS_SFR Salida virtual: SOS solicitada
VOUT_SOS_SSR Salida virtual: SOS estado seguro alcanzado
[54-3] SOS_ERR Señal de error interna: Error 54-3
Tab. 2.48 Leyenda de la Fig. 2.22
La función de seguridad SOS se solicita de la siguiente manera:
– Por el usuario mediante una combinación indistinta de señales de entrada LIN_D... que son
conducidas a la señal VIN_SOS_RSF.
– A través de la función de seguridad SS2, señal SS2_SOS_RSF.
La solicitud de la función de seguridad SOS se desactiva de la siguiente manera:
– Por el usuario mediante una combinación de distintas entradas que son conducidas a la señal
VIN_SOS_CSF.
– Mediante la activación del parámetro “Rearranque automático permitido” (P0B.03) se consigue un
rearranque automático después de retirar la solicitud.
Cualquier solicitud de la función de seguridad tiene prioridad sobre la finalización de la solicitud.
Esto significa que: Mientras esté presente una de las señales xxx_RSF no es posible finalizar la función
de seguridad a través de una señal xxx_CSF.
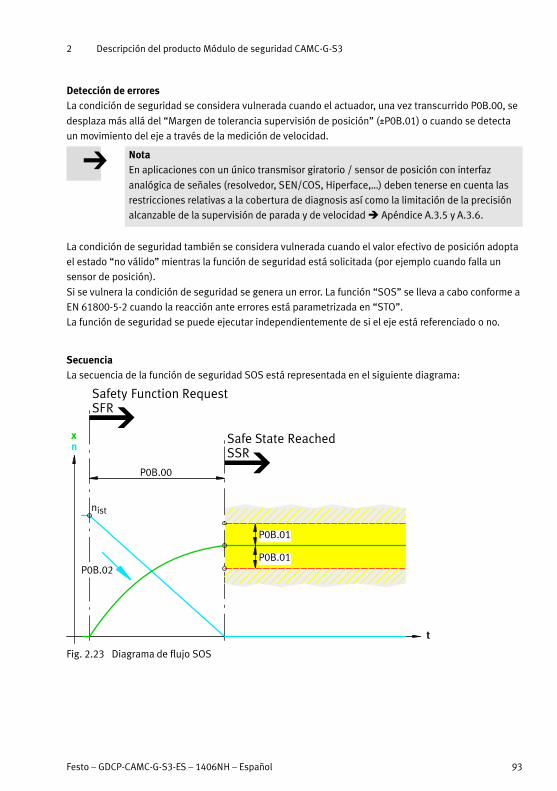
2 Descripción del producto Módulo de seguridad CAMC-G-S3
Festo – GDCP-CAMC-G-S3-ES – 1406NH – Español 93
Detección de erroresLa condición de seguridad se considera vulnerada cuando el actuador, una vez transcurrido P0B.00, se
desplaza más allá del “Margen de tolerancia supervisión de posición” (±P0B.01) o cuando se detecta
un movimiento del eje a través de la medición de velocidad.
NotaEn aplicaciones con un único transmisor giratorio / sensor de posición con interfaz
analógica de señales (resolvedor, SEN/COS, Hiperface,…) deben tenerse en cuenta las
restricciones relativas a la cobertura de diagnosis así como la limitación de la precisión
alcanzable de la supervisión de parada y de velocidad � Apéndice A.3.5 y A.3.6.
La condición de seguridad también se considera vulnerada cuando el valor efectivo de posición adopta
el estado “no válido” mientras la función de seguridad está solicitada (por ejemplo cuando falla un
sensor de posición).
Si se vulnera la condición de seguridad se genera un error. La función “SOS” se lleva a cabo conforme a
EN 61800-5-2 cuando la reacción ante errores está parametrizada en “STO”.
La función de seguridad se puede ejecutar independientemente de si el eje está referenciado o no.
SecuenciaLa secuencia de la función de seguridad SOS está representada en el siguiente diagrama:
Safety Function RequestSFR
P0B.00
n
t
nist
Safe State ReachedSSR
x
P0B.01
P0B.01
P0B.02
Fig. 2.23 Diagrama de flujo SOS
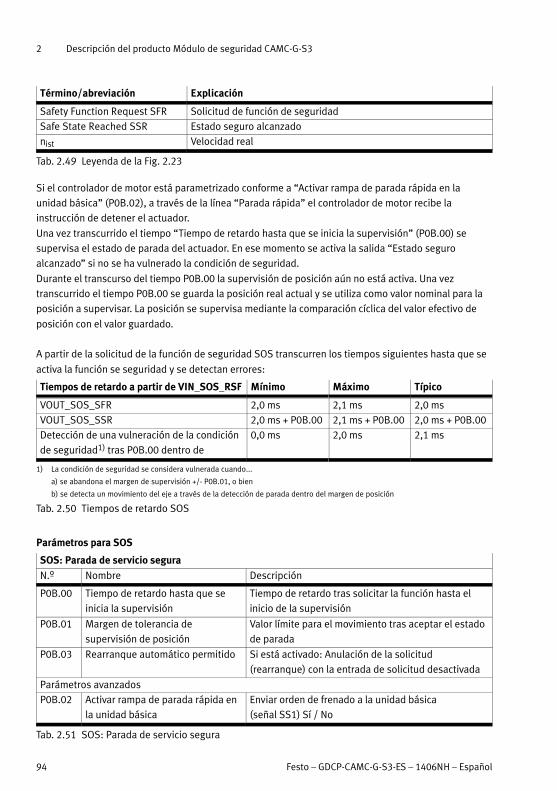
2 Descripción del producto Módulo de seguridad CAMC-G-S3
94 Festo – GDCP-CAMC-G-S3-ES – 1406NH – Español
Término/abreviación Explicación
Safety Function Request SFR Solicitud de función de seguridad
Safe State Reached SSR Estado seguro alcanzado
nist Velocidad real
Tab. 2.49 Leyenda de la Fig. 2.23
Si el controlador de motor está parametrizado conforme a “Activar rampa de parada rápida en la
unidad básica” (P0B.02), a través de la línea “Parada rápida” el controlador de motor recibe la
instrucción de detener el actuador.
Una vez transcurrido el tiempo “Tiempo de retardo hasta que se inicia la supervisión” (P0B.00) se
supervisa el estado de parada del actuador. En ese momento se activa la salida “Estado seguro
alcanzado” si no se ha vulnerado la condición de seguridad.
Durante el transcurso del tiempo P0B.00 la supervisión de posición aún no está activa. Una vez
transcurrido el tiempo P0B.00 se guarda la posición real actual y se utiliza como valor nominal para la
posición a supervisar. La posición se supervisa mediante la comparación cíclica del valor efectivo de
posición con el valor guardado.
A partir de la solicitud de la función de seguridad SOS transcurren los tiempos siguientes hasta que se
activa la función se seguridad y se detectan errores:
Tiempos de retardo a partir de VIN_SOS_RSF Mínimo Máximo Típico
VOUT_SOS_SFR 2,0 ms 2,1 ms 2,0 ms
VOUT_SOS_SSR 2,0 ms + P0B.00 2,1 ms + P0B.00 2,0 ms + P0B.00
Detección de una vulneración de la condición
de seguridad1) tras P0B.00 dentro de
0,0 ms 2,0 ms 2,1 ms
1) La condición de seguridad se considera vulnerada cuando...
a) se abandona el margen de supervisión +/- P0B.01, o bien
b) se detecta un movimiento del eje a través de la detección de parada dentro del margen de posición
Tab. 2.50 Tiempos de retardo SOS
Parámetros para SOS
SOS: Parada de servicio segura
N.º Nombre Descripción
P0B.00 Tiempo de retardo hasta que se
inicia la supervisión
Tiempo de retardo tras solicitar la función hasta el
inicio de la supervisión
P0B.01 Margen de tolerancia de
supervisión de posición
Valor límite para el movimiento tras aceptar el estado
de parada
P0B.03 Rearranque automático permitido Si está activado: Anulación de la solicitud
(rearranque) con la entrada de solicitud desactivada
Parámetros avanzados
P0B.02 Activar rampa de parada rápida en
la unidad básica
Enviar orden de frenado a la unidad básica
(señal SS1) Sí / No
Tab. 2.51 SOS: Parada de servicio segura
2 Descripción del producto Módulo de seguridad CAMC-G-S3
Festo – GDCP-CAMC-G-S3-ES – 1406NH – Español 95
2.5.6 Funciones de seguridad universales USF
Las “Funciones de seguridad universales” (Universal Safety Function, USF) ) sirven para la
supervisión de las magnitudes de estado (carrera, velocidad y fuerza / par de giro) del
motor / eje.
Actualmente está disponible:
– La “Función segura de velocidad” (“Save Speed Function”, SSF)
La función USF agrupa también los términos productos para “Solicitar”, “Finalizar
solicitud”, las entradas y salidas lógicas y virtuales (LIN_USFx..., VOUT_USFx...) y los
parámetros de la gestión de errores.
Están disponibles 4 funciones USF (USF0 … USF3).
2.5.7 Funciones seguras de velocidad SSF
AplicaciónMediante la parametrización es posible atribuir a la “Función segura de velocidad” (“Save Speed
Function”, SSF) una de las siguientes funciones de seguridad:
– SLS – Velocidad con limitación segura (Safely-Limited Speed) � Sección 2.5.8,
– SSR – Margen de velocidad seguro (Safe Speed Range) � Sección 2.5.9,
– SSM – Control de velocidad seguro (Safe Speed Monitoring) � Sección 2.5.10.
La función específica se determina entonces a través de una parametrización específica del SSF, véanse
las secciones siguientes.
Cada una de las 4 funciones USF contiene a tal fin una función SSF (SSF0 … SSF3). De este modo es
posible poner en práctica hasta 4 funciones de seguridad y ejecutarlas paralelamente.
FunciónLas SSF con los atributos SLS / SSR / SSM controlan la velocidad del actuador en base a límites
mínimos y máximos. Si la velocidad del motor sobrepasa el valor límite, se genera el mensaje
“Vulneración de condición de seguridad”.
Los límites de velocidad para la supervisión están predeterminados de manera no estática. La SSF
puede calcular dinámicamente rampas de velocidad y también supervisarlas, de modo que el actuador
es conducido desde cualquier velocidad al margen de velocidad seguro deseado.
Además, la limitación de la velocidad del controlador de motor se puede controlar de manera que no se
vulnere la condición de seguridad.
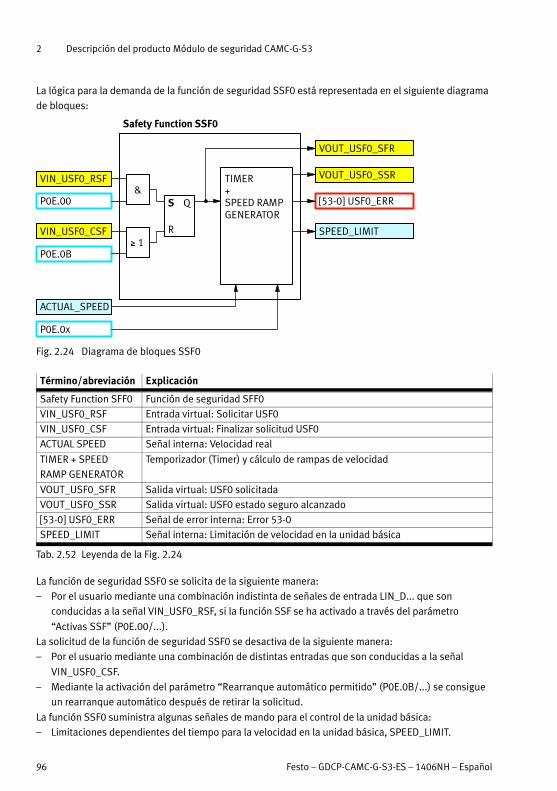
2 Descripción del producto Módulo de seguridad CAMC-G-S3
96 Festo – GDCP-CAMC-G-S3-ES – 1406NH – Español
La lógica para la demanda de la función de seguridad SSF0 está representada en el siguiente diagrama
de bloques:
Safety Function SSF0
TIMER+ SPEED RAMPGENERATOR
&
1
S
R
Q
VOUT_USF0_SFR
VOUT_USF0_SSR
[53-0] USF0_ERRP0E.00
VIN_USF0_CSF
P0E.0B
P0E.0x
SPEED_LIMIT
VIN_USF0_RSF
ACTUAL_SPEED
Fig. 2.24 Diagrama de bloques SSF0
Término/abreviación Explicación
Safety Function SFF0 Función de seguridad SFF0
VIN_USF0_RSF Entrada virtual: Solicitar USF0
VIN_USF0_CSF Entrada virtual: Finalizar solicitud USF0
ACTUAL SPEED Señal interna: Velocidad real
TIMER + SPEED
RAMP GENERATOR
Temporizador (Timer) y cálculo de rampas de velocidad
VOUT_USF0_SFR Salida virtual: USF0 solicitada
VOUT_USF0_SSR Salida virtual: USF0 estado seguro alcanzado
[53-0] USF0_ERR Señal de error interna: Error 53-0
SPEED_LIMIT Señal interna: Limitación de velocidad en la unidad básica
Tab. 2.52 Leyenda de la Fig. 2.24
La función de seguridad SSF0 se solicita de la siguiente manera:
– Por el usuario mediante una combinación indistinta de señales de entrada LIN_D... que son
conducidas a la señal VIN_USF0_RSF, si la función SSF se ha activado a través del parámetro
“Activas SSF” (P0E.00/...).
La solicitud de la función de seguridad SSF0 se desactiva de la siguiente manera:
– Por el usuario mediante una combinación de distintas entradas que son conducidas a la señal
VIN_USF0_CSF.
– Mediante la activación del parámetro “Rearranque automático permitido” (P0E.0B/...) se consigue
un rearranque automático después de retirar la solicitud.
La función SSF0 suministra algunas señales de mando para el control de la unidad básica:
– Limitaciones dependientes del tiempo para la velocidad en la unidad básica, SPEED_LIMIT.
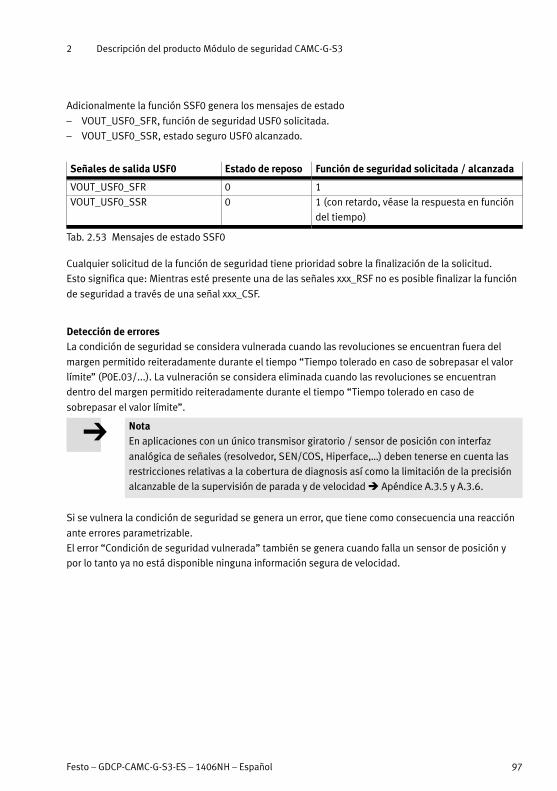
2 Descripción del producto Módulo de seguridad CAMC-G-S3
Festo – GDCP-CAMC-G-S3-ES – 1406NH – Español 97
Adicionalmente la función SSF0 genera los mensajes de estado
– VOUT_USF0_SFR, función de seguridad USF0 solicitada.
– VOUT_USF0_SSR, estado seguro USF0 alcanzado.
Señales de salida USF0 Estado de reposo Función de seguridad solicitada / alcanzada
VOUT_USF0_SFR 0 1
VOUT_USF0_SSR 0 1 (con retardo, véase la respuesta en función
del tiempo)
Tab. 2.53 Mensajes de estado SSF0
Cualquier solicitud de la función de seguridad tiene prioridad sobre la finalización de la solicitud.
Esto significa que: Mientras esté presente una de las señales xxx_RSF no es posible finalizar la función
de seguridad a través de una señal xxx_CSF.
Detección de erroresLa condición de seguridad se considera vulnerada cuando las revoluciones se encuentran fuera del
margen permitido reiteradamente durante el tiempo “Tiempo tolerado en caso de sobrepasar el valor
límite” (P0E.03/...). La vulneración se considera eliminada cuando las revoluciones se encuentran
dentro del margen permitido reiteradamente durante el tiempo “Tiempo tolerado en caso de
sobrepasar el valor límite”.
NotaEn aplicaciones con un único transmisor giratorio / sensor de posición con interfaz
analógica de señales (resolvedor, SEN/COS, Hiperface,…) deben tenerse en cuenta las
restricciones relativas a la cobertura de diagnosis así como la limitación de la precisión
alcanzable de la supervisión de parada y de velocidad � Apéndice A.3.5 y A.3.6.
Si se vulnera la condición de seguridad se genera un error, que tiene como consecuencia una reacción
ante errores parametrizable.
El error “Condición de seguridad vulnerada” también se genera cuando falla un sensor de posición y
por lo tanto ya no está disponible ninguna información segura de velocidad.
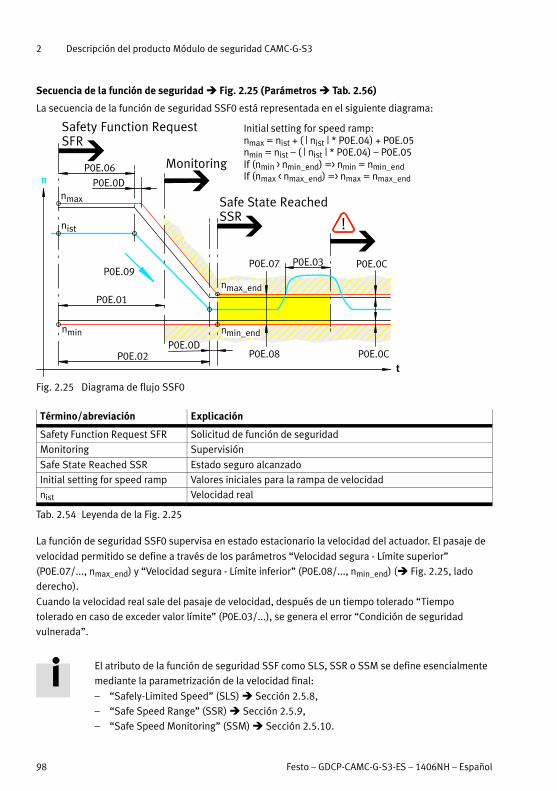
2 Descripción del producto Módulo de seguridad CAMC-G-S3
98 Festo – GDCP-CAMC-G-S3-ES – 1406NH – Español
Secuencia de la función de seguridad � Fig. 2.25 (Parámetros � Tab. 2.56)
La secuencia de la función de seguridad SSF0 está representada en el siguiente diagrama:
Safety Function RequestSFR
P0E.06
P0E.01
P0E.02 P0E.08 P0E.0C
n
t
nmax
nmin
nist
P0E.09
Safe State ReachedSSR
P0E.03P0E.07 P0E.0C
Initial setting for speed ramp:nmax = nist + ( | nist | * P0E.04) + P0E.05nmin = nist � ( | nist | * P0E.04) � P0E.05If (nmin > nmin_end) => nmin = nmin_endIf (nmax < nmax_end) => nmax = nmax_end
Monitoring
P0E.0D
nmax_end
nmin_endP0E.0D
Fig. 2.25 Diagrama de flujo SSF0
Término/abreviación Explicación
Safety Function Request SFR Solicitud de función de seguridad
Monitoring Supervisión
Safe State Reached SSR Estado seguro alcanzado
Initial setting for speed ramp Valores iniciales para la rampa de velocidad
nist Velocidad real
Tab. 2.54 Leyenda de la Fig. 2.25
La función de seguridad SSF0 supervisa en estado estacionario la velocidad del actuador. El pasaje de
velocidad permitido se define a través de los parámetros “Velocidad segura - Límite superior”
(P0E.07/..., nmax_end) y “Velocidad segura - Límite inferior” (P0E.08/..., nmin_end) (� Fig. 2.25, lado
derecho).
Cuando la velocidad real sale del pasaje de velocidad, después de un tiempo tolerado “Tiempo
tolerado en caso de exceder valor límite” (P0E.03/...), se genera el error “Condición de seguridad
vulnerada”.
El atributo de la función de seguridad SSF como SLS, SSR o SSM se define esencialmente
mediante la parametrización de la velocidad final:
– “Safely-Limited Speed” (SLS) � Sección 2.5.8,
– “Safe Speed Range” (SSR) � Sección 2.5.9,
– “Safe Speed Monitoring” (SSM) � Sección 2.5.10.
2 Descripción del producto Módulo de seguridad CAMC-G-S3
Festo – GDCP-CAMC-G-S3-ES – 1406NH – Español 99
Al solicitar la función de seguridad SSF0 (VOUT_USF0_SFR) se ejecuta un cálculo de una rampa de
velocidad para conducir al actuador, partiendo de la velocidad actual, al pasaje de velocidad permitido:
– El cálculo de los valores iniciales nmax y nmin se basa en la velocidad real actual nist como valor
inicial. En base a un parámetro Gain “Rampa de frenado - Factor de valor inicial” (P0E.04/...) y un
parámetro de decalaje “Rampa de frenado - Decalaje de valor inicial” (P0E.05/...) se calcula primero
una ventana inicial con la velocidad real actual.
– La posición de la ventana inicial se establece en relación con el pasaje de velocidad deseado; los
valores iniciales se adaptan, si es necesario, de modo que se obtenga un pasaje de velocidad
trapezoidal que se estrecha (comp. Fig. 2.25).
– El instante de arranque de la rampa se puede determinar mediante “Rampa de frenado - Tiempo de
retardo hasta arranque” (P0E.06/..., valor mínimo: 6 ms) y el instante de fin de la rampa a través de
“Tiempo para rampa de frenado” (P0E.02). Una vez transcurrido el tiempo P0E.02 se ha alcanzado
el pasaje de velocidad estacionario y la función SSF0 indica VOUT_USF0_SSR (¡si la velocidad real
se encuentra en el margen permitido!).
– Mediante “Tiempo de retardo hasta inicio de supervisión” (P0E.01/...) se puede determinar a partir
de qué momento la función SSF0 supervisará la velocidad.
Un retardo de la rampa mediante “Rampa de frenado - Tiempo de retardo hasta inicio”
(P0E.06/...) resulta conveniente siempre que el eje frene a través del control funcional y
sea conducido al pasaje de velocidad supervisado. Con P0E.06 se puede compensar el
tiempo de respuesta del control funcional.
El módulo de seguridad puede acceder activamente a la regulación de la unidad básica y limitar así la
velocidad del eje. Los valores límite se transmiten cíclicamente a la unidad básica:
– Esta función se activa al establecer el parámetro “Limitar activamente la velocidad en la unidad
básica” (P0E.09/...).
– En caso de limitación activa de la velocidad en la unidad básica, para garantizar que se respetan de
modo seguro los valores límite supervisados están previstos otros parámetros:
– Por medio del valor mínimo de “Rampa de frenado - Tiempo de retardo hasta el arranque”
(P0E.06, 6 ms) se compensan los tiempos de ejecución internos del aparato para la transmisión
de señales de los nuevos valores límite de la unidad básica hasta la intervención de la regulación
en la unidad básica.
– Mediante “Rampa de revoluciones - Tiempo de retardo supervisión” (P0E.0D/...) se puede
retardar el límite de velocidad utilizado para la supervisión en el módulo de seguridad
expresamente en otros cuando milisegundos. Esto concede a la unidad básica un tiempo
adicional, p. ej. cuando en ella se ha seleccionado un perfil de desplazamiento con sacudida
limitada y solo se puede frenar con limitación de sacudida.
– Mediante “Decalaje de limitación de velocidad” (P0E.0C/...) se puede parametrizar finalmente
un decalaje de la velocidad. Los límites de velocidad para la unidad básica están desplazados
entonces en P0E.0C/... dentro del pasaje de velocidad para la supervisión, de modo que las
fluctuaciones mínimas de la velocidad real aún no originan una reacción de la supervisión.
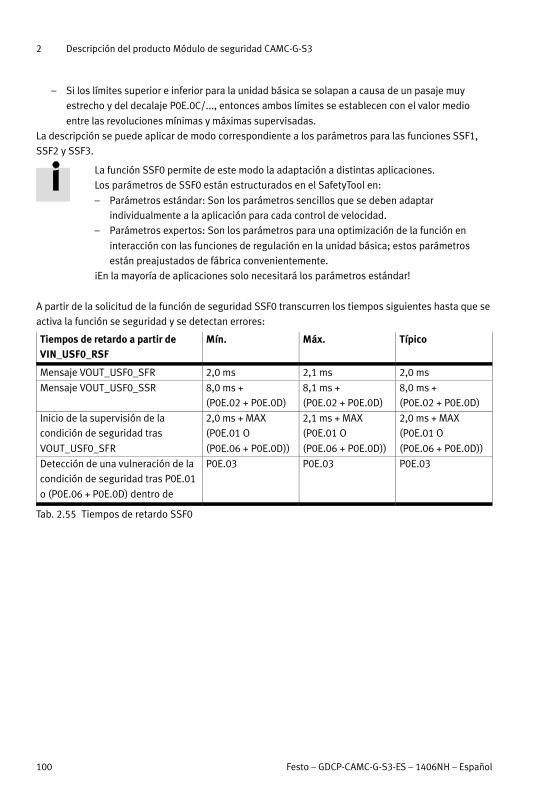
2 Descripción del producto Módulo de seguridad CAMC-G-S3
100 Festo – GDCP-CAMC-G-S3-ES – 1406NH – Español
– Si los límites superior e inferior para la unidad básica se solapan a causa de un pasaje muy
estrecho y del decalaje P0E.0C/..., entonces ambos límites se establecen con el valor medio
entre las revoluciones mínimas y máximas supervisadas.
La descripción se puede aplicar de modo correspondiente a los parámetros para las funciones SSF1,
SSF2 y SSF3.
La función SSF0 permite de este modo la adaptación a distintas aplicaciones.
Los parámetros de SSF0 están estructurados en el SafetyTool en:
– Parámetros estándar: Son los parámetros sencillos que se deben adaptar
individualmente a la aplicación para cada control de velocidad.
– Parámetros expertos: Son los parámetros para una optimización de la función en
interacción con las funciones de regulación en la unidad básica; estos parámetros
están preajustados de fábrica convenientemente.
¡En la mayoría de aplicaciones solo necesitará los parámetros estándar!
A partir de la solicitud de la función de seguridad SSF0 transcurren los tiempos siguientes hasta que se
activa la función se seguridad y se detectan errores:
Tiempos de retardo a partir deVIN_USF0_RSF
Mín. Máx. Típico
Mensaje VOUT_USF0_SFR 2,0 ms 2,1 ms 2,0 ms
Mensaje VOUT_USF0_SSR 8,0 ms +
(P0E.02 + P0E.0D)
8,1 ms +
(P0E.02 + P0E.0D)
8,0 ms +
(P0E.02 + P0E.0D)
Inicio de la supervisión de la
condición de seguridad tras
VOUT_USF0_SFR
2,0 ms + MAX
(P0E.01 O
(P0E.06 + P0E.0D))
2,1 ms + MAX
(P0E.01 O
(P0E.06 + P0E.0D))
2,0 ms + MAX
(P0E.01 O
(P0E.06 + P0E.0D))
Detección de una vulneración de la
condición de seguridad tras P0E.01
o (P0E.06 + P0E.0D) dentro de
P0E.03 P0E.03 P0E.03
Tab. 2.55 Tiempos de retardo SSF0
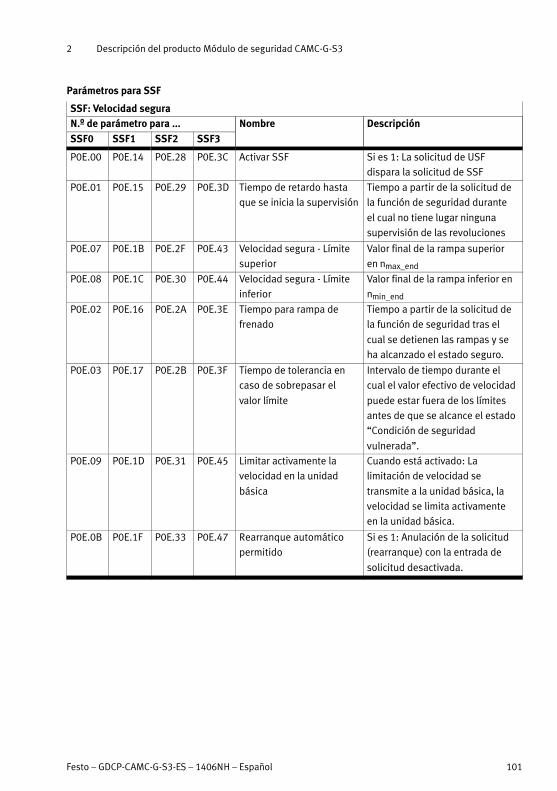
2 Descripción del producto Módulo de seguridad CAMC-G-S3
Festo – GDCP-CAMC-G-S3-ES – 1406NH – Español 101
Parámetros para SSF
SSF: Velocidad seguraN.º de parámetro para ... Nombre Descripción
SSF0 SSF1 SSF2 SSF3
P0E.00 P0E.14 P0E.28 P0E.3C Activar SSF Si es 1: La solicitud de USF
dispara la solicitud de SSF
P0E.01 P0E.15 P0E.29 P0E.3D Tiempo de retardo hasta
que se inicia la supervisión
Tiempo a partir de la solicitud de
la función de seguridad durante
el cual no tiene lugar ninguna
supervisión de las revoluciones
P0E.07 P0E.1B P0E.2F P0E.43 Velocidad segura - Límite
superior
Valor final de la rampa superior
en nmax_end
P0E.08 P0E.1C P0E.30 P0E.44 Velocidad segura - Límite
inferior
Valor final de la rampa inferior en
nmin_end
P0E.02 P0E.16 P0E.2A P0E.3E Tiempo para rampa de
frenado
Tiempo a partir de la solicitud de
la función de seguridad tras el
cual se detienen las rampas y se
ha alcanzado el estado seguro.
P0E.03 P0E.17 P0E.2B P0E.3F Tiempo de tolerancia en
caso de sobrepasar el
valor límite
Intervalo de tiempo durante el
cual el valor efectivo de velocidad
puede estar fuera de los límites
antes de que se alcance el estado
“Condición de seguridad
vulnerada”.
P0E.09 P0E.1D P0E.31 P0E.45 Limitar activamente la
velocidad en la unidad
básica
Cuando está activado: La
limitación de velocidad se
transmite a la unidad básica, la
velocidad se limita activamente
en la unidad básica.
P0E.0B P0E.1F P0E.33 P0E.47 Rearranque automático
permitido
Si es 1: Anulación de la solicitud
(rearranque) con la entrada de
solicitud desactivada.
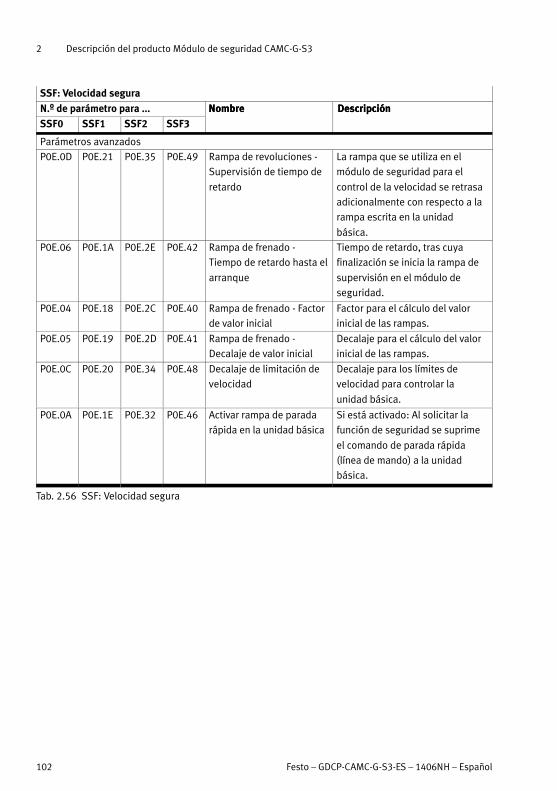
2 Descripción del producto Módulo de seguridad CAMC-G-S3
102 Festo – GDCP-CAMC-G-S3-ES – 1406NH – Español
SSF: Velocidad segura
N.º de parámetro para ... DescripciónNombre
SSF0
DescripciónNombre
SSF3SSF2SSF1
Parámetros avanzados
P0E.0D P0E.21 P0E.35 P0E.49 Rampa de revoluciones -
Supervisión de tiempo de
retardo
La rampa que se utiliza en el
módulo de seguridad para el
control de la velocidad se retrasa
adicionalmente con respecto a la
rampa escrita en la unidad
básica.
P0E.06 P0E.1A P0E.2E P0E.42 Rampa de frenado -
Tiempo de retardo hasta el
arranque
Tiempo de retardo, tras cuya
finalización se inicia la rampa de
supervisión en el módulo de
seguridad.
P0E.04 P0E.18 P0E.2C P0E.40 Rampa de frenado - Factor
de valor inicial
Factor para el cálculo del valor
inicial de las rampas.
P0E.05 P0E.19 P0E.2D P0E.41 Rampa de frenado -
Decalaje de valor inicial
Decalaje para el cálculo del valor
inicial de las rampas.
P0E.0C P0E.20 P0E.34 P0E.48 Decalaje de limitación de
velocidad
Decalaje para los límites de
velocidad para controlar la
unidad básica.
P0E.0A P0E.1E P0E.32 P0E.46 Activar rampa de parada
rápida en la unidad básica
Si está activado: Al solicitar la
función de seguridad se suprime
el comando de parada rápida
(línea de mando) a la unidad
básica.
Tab. 2.56 SSF: Velocidad segura
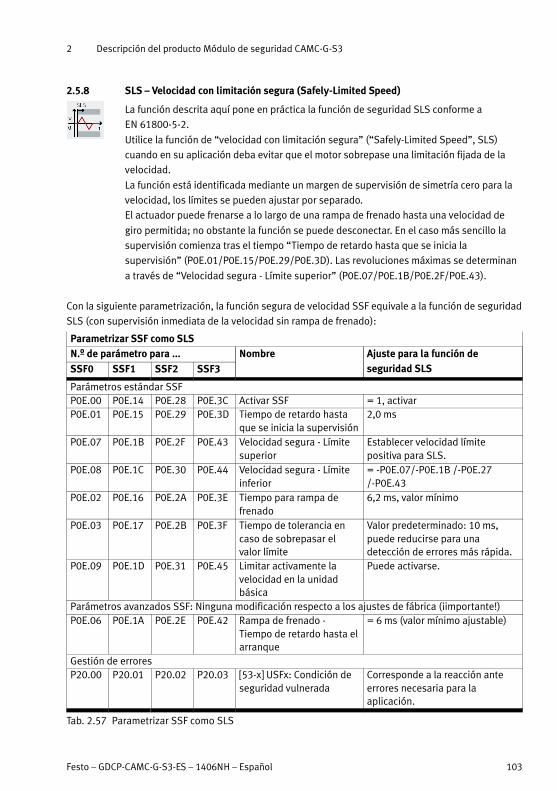
2 Descripción del producto Módulo de seguridad CAMC-G-S3
Festo – GDCP-CAMC-G-S3-ES – 1406NH – Español 103
2.5.8 SLS – Velocidad con limitación segura (Safely-Limited Speed)
La función descrita aquí pone en práctica la función de seguridad SLS conforme a
EN 61800-5-2.
Utilice la función de “velocidad con limitación segura” (“Safely-Limited Speed”, SLS)
cuando en su aplicación deba evitar que el motor sobrepase una limitación fijada de la
velocidad.
La función está identificada mediante un margen de supervisión de simetría cero para la
velocidad, los límites se pueden ajustar por separado.
El actuador puede frenarse a lo largo de una rampa de frenado hasta una velocidad de
giro permitida; no obstante la función se puede desconectar. En el caso más sencillo la
supervisión comienza tras el tiempo “Tiempo de retardo hasta que se inicia la
supervisión” (P0E.01/P0E.15/P0E.29/P0E.3D). Las revoluciones máximas se determinan
a través de “Velocidad segura - Límite superior” (P0E.07/P0E.1B/P0E.2F/P0E.43).
Con la siguiente parametrización, la función segura de velocidad SSF equivale a la función de seguridad
SLS (con supervisión inmediata de la velocidad sin rampa de frenado):
Parametrizar SSF como SLSN.º de parámetro para ... Nombre Ajuste para la función de
seguridad SLSSSF0 SSF1 SSF2 SSF3
Parámetros estándar SSFP0E.00 P0E.14 P0E.28 P0E.3C Activar SSF = 1, activarP0E.01 P0E.15 P0E.29 P0E.3D Tiempo de retardo hasta
que se inicia la supervisión2,0 ms
P0E.07 P0E.1B P0E.2F P0E.43 Velocidad segura - Límitesuperior
Establecer velocidad límitepositiva para SLS.
P0E.08 P0E.1C P0E.30 P0E.44 Velocidad segura - Límiteinferior
= -P0E.07/-P0E.1B /-P0E.27/-P0E.43
P0E.02 P0E.16 P0E.2A P0E.3E Tiempo para rampa defrenado
6,2 ms, valor mínimo
P0E.03 P0E.17 P0E.2B P0E.3F Tiempo de tolerancia encaso de sobrepasar elvalor límite
Valor predeterminado: 10 ms,puede reducirse para unadetección de errores más rápida.
P0E.09 P0E.1D P0E.31 P0E.45 Limitar activamente lavelocidad en la unidadbásica
Puede activarse.
Parámetros avanzados SSF: Ninguna modificación respecto a los ajustes de fábrica (¡importante!)P0E.06 P0E.1A P0E.2E P0E.42 Rampa de frenado -
Tiempo de retardo hasta elarranque
= 6 ms (valor mínimo ajustable)
Gestión de erroresP20.00 P20.01 P20.02 P20.03 [53-x] USFx: Condición de
seguridad vulneradaCorresponde a la reacción anteerrores necesaria para laaplicación.
Tab. 2.57 Parametrizar SSF como SLS
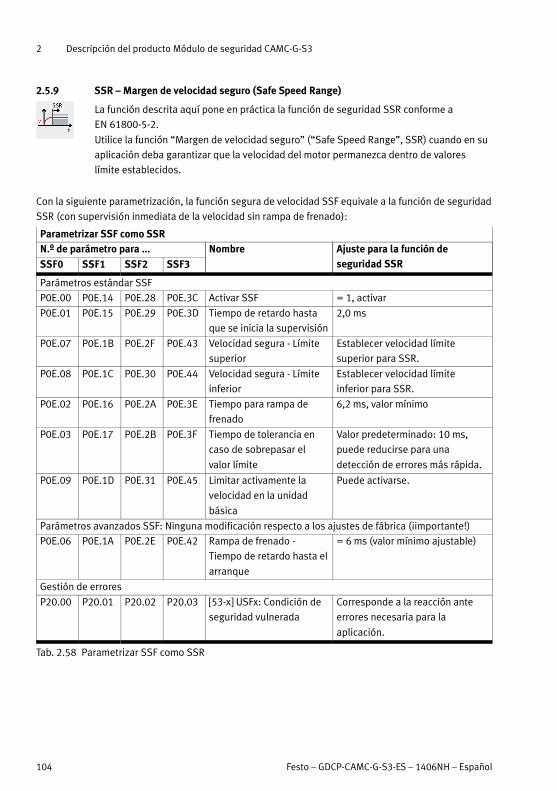
2 Descripción del producto Módulo de seguridad CAMC-G-S3
104 Festo – GDCP-CAMC-G-S3-ES – 1406NH – Español
2.5.9 SSR – Margen de velocidad seguro (Safe Speed Range)
La función descrita aquí pone en práctica la función de seguridad SSR conforme a
EN 61800-5-2.
Utilice la función “Margen de velocidad seguro” (“Safe Speed Range”, SSR) cuando en su
aplicación deba garantizar que la velocidad del motor permanezca dentro de valores
límite establecidos.
Con la siguiente parametrización, la función segura de velocidad SSF equivale a la función de seguridad
SSR (con supervisión inmediata de la velocidad sin rampa de frenado):
Parametrizar SSF como SSRN.º de parámetro para ... Nombre Ajuste para la función de
seguridad SSRSSF0 SSF1 SSF2 SSF3
Parámetros estándar SSF
P0E.00 P0E.14 P0E.28 P0E.3C Activar SSF = 1, activar
P0E.01 P0E.15 P0E.29 P0E.3D Tiempo de retardo hasta
que se inicia la supervisión
2,0 ms
P0E.07 P0E.1B P0E.2F P0E.43 Velocidad segura - Límite
superior
Establecer velocidad límite
superior para SSR.
P0E.08 P0E.1C P0E.30 P0E.44 Velocidad segura - Límite
inferior
Establecer velocidad límite
inferior para SSR.
P0E.02 P0E.16 P0E.2A P0E.3E Tiempo para rampa de
frenado
6,2 ms, valor mínimo
P0E.03 P0E.17 P0E.2B P0E.3F Tiempo de tolerancia en
caso de sobrepasar el
valor límite
Valor predeterminado: 10 ms,
puede reducirse para una
detección de errores más rápida.
P0E.09 P0E.1D P0E.31 P0E.45 Limitar activamente la
velocidad en la unidad
básica
Puede activarse.
Parámetros avanzados SSF: Ninguna modificación respecto a los ajustes de fábrica (¡importante!)
P0E.06 P0E.1A P0E.2E P0E.42 Rampa de frenado -
Tiempo de retardo hasta el
arranque
= 6 ms (valor mínimo ajustable)
Gestión de errores
P20.00 P20.01 P20.02 P20.03 [53-x] USFx: Condición de
seguridad vulnerada
Corresponde a la reacción ante
errores necesaria para la
aplicación.
Tab. 2.58 Parametrizar SSF como SSR
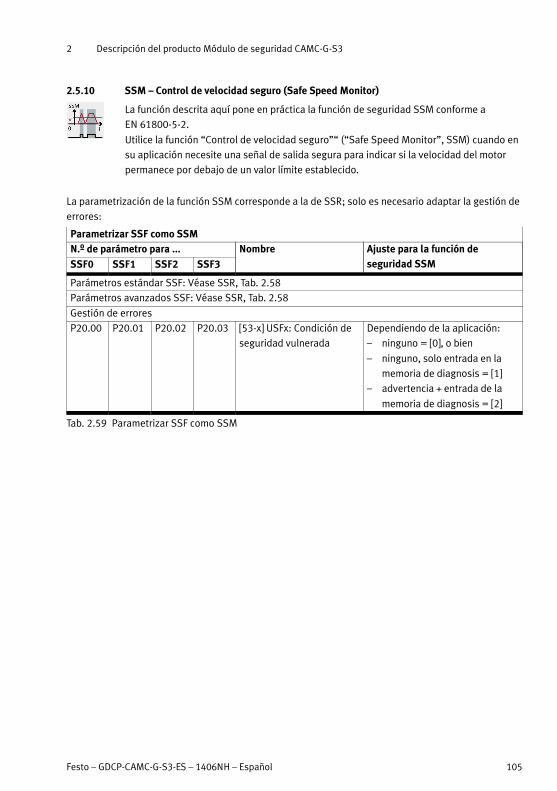
2 Descripción del producto Módulo de seguridad CAMC-G-S3
Festo – GDCP-CAMC-G-S3-ES – 1406NH – Español 105
2.5.10 SSM – Control de velocidad seguro (Safe Speed Monitor)
La función descrita aquí pone en práctica la función de seguridad SSM conforme a
EN 61800-5-2.
Utilice la función “Control de velocidad seguro”� (“Safe Speed Monitor”, SSM) cuando en
su aplicación necesite una señal de salida segura para indicar si la velocidad del motor
permanece por debajo de un valor límite establecido.
La parametrización de la función SSM corresponde a la de SSR; solo es necesario adaptar la gestión de
errores:
Parametrizar SSF como SSMN.º de parámetro para ... Nombre Ajuste para la función de
seguridad SSMSSF0 SSF1 SSF2 SSF3
Parámetros estándar SSF: Véase SSR, Tab. 2.58
Parámetros avanzados SSF: Véase SSR, Tab. 2.58
Gestión de errores
P20.00 P20.01 P20.02 P20.03 [53-x] USFx: Condición de
seguridad vulnerada
Dependiendo de la aplicación:
– ninguno = [0], o bien
– ninguno, solo entrada en la
memoria de diagnosis = [1]
– advertencia + entrada de la
memoria de diagnosis = [2]
Tab. 2.59 Parametrizar SSF como SSM
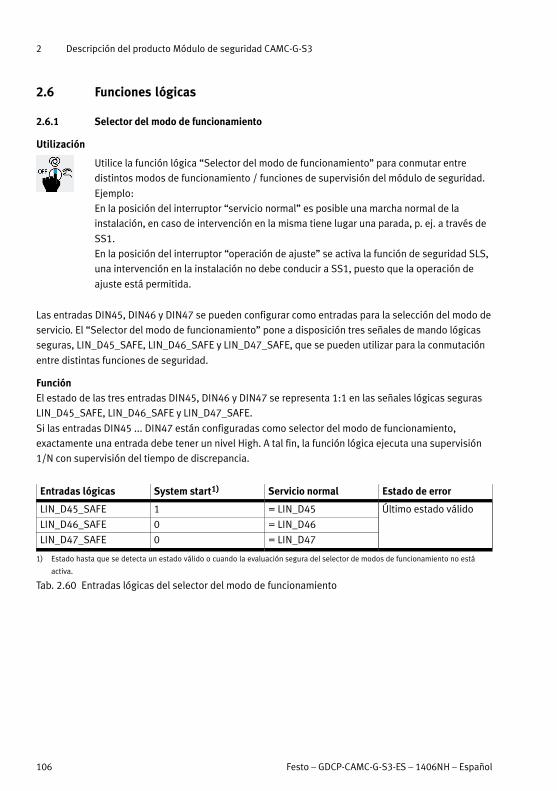
2 Descripción del producto Módulo de seguridad CAMC-G-S3
106 Festo – GDCP-CAMC-G-S3-ES – 1406NH – Español
2.6 Funciones lógicas
2.6.1 Selector del modo de funcionamiento
Utilización
Utilice la función lógica “Selector del modo de funcionamiento” para conmutar entre
distintos modos de funcionamiento / funciones de supervisión del módulo de seguridad.
Ejemplo:
En la posición del interruptor “servicio normal” es posible una marcha normal de la
instalación, en caso de intervención en la misma tiene lugar una parada, p. ej. a través de
SS1.
En la posición del interruptor “operación de ajuste” se activa la función de seguridad SLS,
una intervención en la instalación no debe conducir a SS1, puesto que la operación de
ajuste está permitida.
Las entradas DIN45, DIN46 y DIN47 se pueden configurar como entradas para la selección del modo de
servicio. El “Selector del modo de funcionamiento” pone a disposición tres señales de mando lógicas
seguras, LIN_D45_SAFE, LIN_D46_SAFE y LIN_D47_SAFE, que se pueden utilizar para la conmutación
entre distintas funciones de seguridad.
FunciónEl estado de las tres entradas DIN45, DIN46 y DIN47 se representa 1:1 en las señales lógicas seguras
LIN_D45_SAFE, LIN_D46_SAFE y LIN_D47_SAFE.
Si las entradas DIN45 ... DIN47 están configuradas como selector del modo de funcionamiento,
exactamente una entrada debe tener un nivel High. A tal fin, la función lógica ejecuta una supervisión
1/N con supervisión del tiempo de discrepancia.
Entradas lógicas System start1) Servicio normal Estado de error
LIN_D45_SAFE 1 = LIN_D45 Último estado válido
LIN_D46_SAFE 0 = LIN_D46
LIN_D47_SAFE 0 = LIN_D47
1) Estado hasta que se detecta un estado válido o cuando la evaluación segura del selector de modos de funcionamiento no está
activa.
Tab. 2.60 Entradas lógicas del selector del modo de funcionamiento
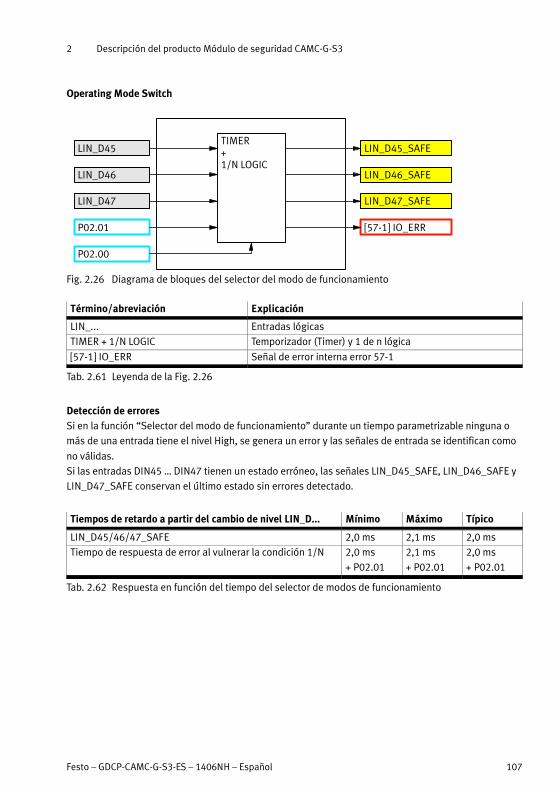
2 Descripción del producto Módulo de seguridad CAMC-G-S3
Festo – GDCP-CAMC-G-S3-ES – 1406NH – Español 107
LIN_D45_SAFE
[57-1] IO_ERR
LIN_D45
P02.00
Operating Mode Switch
TIMER+1/N LOGIC
LIN_D46
LIN_D47
P02.01
LIN_D46_SAFE
LIN_D47_SAFE
Fig. 2.26 Diagrama de bloques del selector del modo de funcionamiento
Término/abreviación Explicación
LIN_... Entradas lógicas
TIMER + 1/N LOGIC Temporizador (Timer) y 1 de n lógica
[57-1] IO_ERR Señal de error interna error 57-1
Tab. 2.61 Leyenda de la Fig. 2.26
Detección de erroresSi en la función “Selector del modo de funcionamiento” durante un tiempo parametrizable ninguna o
más de una entrada tiene el nivel High, se genera un error y las señales de entrada se identifican como
no válidas.
Si las entradas DIN45 … DIN47 tienen un estado erróneo, las señales LIN_D45_SAFE, LIN_D46_SAFE y
LIN_D47_SAFE conservan el último estado sin errores detectado.
Tiempos de retardo a partir del cambio de nivel LIN_D... Mínimo Máximo Típico
LIN_D45/46/47_SAFE 2,0 ms 2,1 ms 2,0 ms
Tiempo de respuesta de error al vulnerar la condición 1/N 2,0 ms
+ P02.01
2,1 ms
+ P02.01
2,0 ms
+ P02.01
Tab. 2.62 Respuesta en función del tiempo del selector de modos de funcionamiento
2 Descripción del producto Módulo de seguridad CAMC-G-S3
108 Festo – GDCP-CAMC-G-S3-ES – 1406NH – Español
Parámetros del selector de modos de funcionamiento
Selector del modo de funcionamientoN.º Nombre Descripción
P02.00 Activación DIN45..DIN47 se utilizan como selector del modo
de funcionamiento (1 de 3).
P02.01 Tiempo de discrepancia Tiempo durante el cual más de una entrada a la
vez o ninguna entrada pueden tener nivel High.
Tab. 2.63 Selector del modo de funcionamiento
2.6.2 Terminal de mando de dos manos
Utilización
La función lógica “Terminal de mando de dos manos” se utiliza en aplicaciones en las que
el operador debe habilitar el movimiento con ambas manos en cuanto ha abandonado la
zona de peligro (p. ej., aplicaciones de prensado)
UtilizaciónEl terminal de mando de dos manos suministra la señal de mando LIN_2HAND_CTRL = LIN_DIN42 OR
LIN_DIN43, con la cual se pueden conmutar funciones de seguridad a través de operaciones lógicas.
Adicionalmente supervisa la conmutación simultánea de las entradas (supervisión de tiempo de
discrepancia).
El terminal de mando de dos manos ocupa las dos entradas DIN42 y DIN43 (de dos canales A y B
respectivamente) y se puede activar solo después de seleccionar como tipo de sensor conectado
“Terminal de mando de dos manos” para las entradas de mando DIN42 y DIN43.
En el modo de funcionamiento “Terminal de mando de dos manos” las entradas individuales DIN42 y
DIN43 siguen teniendo todas las funciones “normales” (equivalencia/antivalencia, señales de prueba,
comparación cruzada con 2º procesador ...).
Función
El resultado del enlace de ambas entradas se transmite a la entrada lógica separada LIN_2HAND_CTRL.
LIN_2HAND_CTRL representa un enlace O entre LIN_D42 y LIN_D43, esto significa que solo tiene el
estado “0” cuando ambas entradas lógicas tienen el estado “0”.
LIN_2HAND_CTRL = LIN_DIN42 OR LIN_DIN43
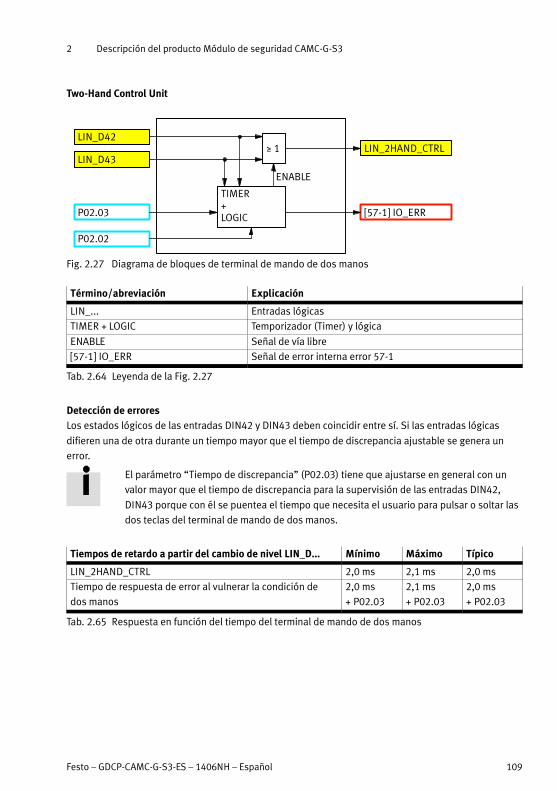
2 Descripción del producto Módulo de seguridad CAMC-G-S3
Festo – GDCP-CAMC-G-S3-ES – 1406NH – Español 109
LIN_2HAND_CTRL
[57-1] IO_ERR
LIN_D42
P02.02
Two-Hand Control Unit
TIMER+LOGIC
LIN_D43
P02.03
1
ENABLE
Fig. 2.27 Diagrama de bloques de terminal de mando de dos manos
Término/abreviación Explicación
LIN_... Entradas lógicas
TIMER + LOGIC Temporizador (Timer) y lógica
ENABLE Señal de vía libre
[57-1] IO_ERR Señal de error interna error 57-1
Tab. 2.64 Leyenda de la Fig. 2.27
Detección de erroresLos estados lógicos de las entradas DIN42 y DIN43 deben coincidir entre sí. Si las entradas lógicas
difieren una de otra durante un tiempo mayor que el tiempo de discrepancia ajustable se genera un
error.
El parámetro “Tiempo de discrepancia” (P02.03) tiene que ajustarse en general con un
valor mayor que el tiempo de discrepancia para la supervisión de las entradas DIN42,
DIN43 porque con él se puentea el tiempo que necesita el usuario para pulsar o soltar las
dos teclas del terminal de mando de dos manos.
Tiempos de retardo a partir del cambio de nivel LIN_D... Mínimo Máximo Típico
LIN_2HAND_CTRL 2,0 ms 2,1 ms 2,0 ms
Tiempo de respuesta de error al vulnerar la condición de
dos manos
2,0 ms
+ P02.03
2,1 ms
+ P02.03
2,0 ms
+ P02.03
Tab. 2.65 Respuesta en función del tiempo del terminal de mando de dos manos
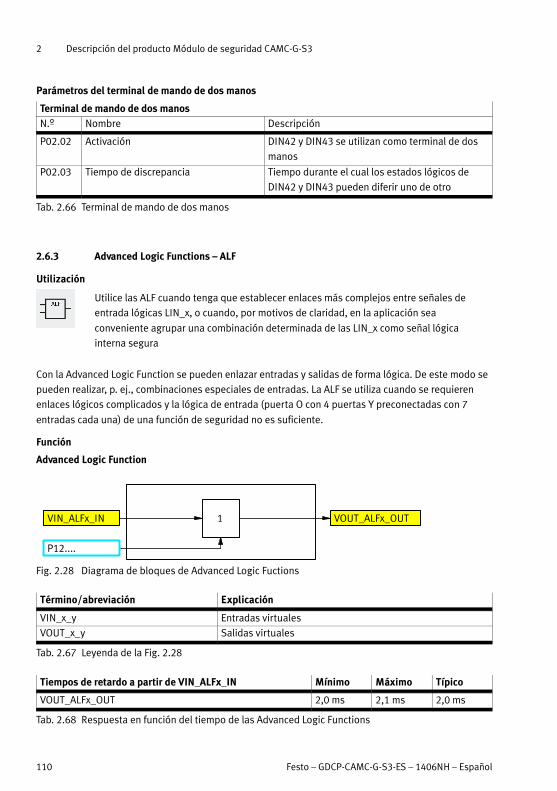
2 Descripción del producto Módulo de seguridad CAMC-G-S3
110 Festo – GDCP-CAMC-G-S3-ES – 1406NH – Español
Parámetros del terminal de mando de dos manos
Terminal de mando de dos manosN.º Nombre Descripción
P02.02 Activación DIN42 y DIN43 se utilizan como terminal de dos
manos
P02.03 Tiempo de discrepancia Tiempo durante el cual los estados lógicos de
DIN42 y DIN43 pueden diferir uno de otro
Tab. 2.66 Terminal de mando de dos manos
2.6.3 Advanced Logic Functions – ALF
Utilización
Utilice las ALF cuando tenga que establecer enlaces más complejos entre señales de
entrada lógicas LIN_x, o cuando, por motivos de claridad, en la aplicación sea
conveniente agrupar una combinación determinada de las LIN_x como señal lógica
interna segura
Con la Advanced Logic Function se pueden enlazar entradas y salidas de forma lógica. De este modo se
pueden realizar, p. ej., combinaciones especiales de entradas. La ALF se utiliza cuando se requieren
enlaces lógicos complicados y la lógica de entrada (puerta O con 4 puertas Y preconectadas con 7
entradas cada una) de una función de seguridad no es suficiente.
Función
VOUT_ALFx_OUTVIN_ALFx_IN
Advanced Logic Function
1
P12....
Fig. 2.28 Diagrama de bloques de Advanced Logic Fuctions
Término/abreviación Explicación
VIN_x_y Entradas virtuales
VOUT_x_y Salidas virtuales
Tab. 2.67 Leyenda de la Fig. 2.28
Tiempos de retardo a partir de VIN_ALFx_IN Mínimo Máximo Típico
VOUT_ALFx_OUT 2,0 ms 2,1 ms 2,0 ms
Tab. 2.68 Respuesta en función del tiempo de las Advanced Logic Functions
2 Descripción del producto Módulo de seguridad CAMC-G-S3
Festo – GDCP-CAMC-G-S3-ES – 1406NH – Español 111
Parámetros de Advanced Logic-Functions
Advanced Logic FunctionsALF... N.º Nombre Descripción
ALF0 P12.00 Función de transmisión Selección de la funcionalidad (fix):
Identidad (OUT = IN) = [2]
Con la función “Identidad” la salida siempre
tiene el estado lógico de la entrada.
ALF1 P12.03 Función de transmisión
ALF2 P12.06 Función de transmisión
ALF3 P12.09 Función de transmisión
ALF4 P12.0C Función de transmisión
ALF5 P12.0F Función de transmisión
ALF6 P12.12 Función de transmisión
ALF7 P12.15 Función de transmisión
Tab. 2.69 Advanced Logic Functions
2.7 Rearranque
2.7.1 Volumen de funciones
Mediante la función “Rearranque” descrita aquí finalizan una o varias funciones de
seguridad, de modo que el actuador puede “volver a arrancar”.
En combinación con funciones seguras de movimiento, como p. ej. SLS, “Rearranque”
significa que el actuador deja de ser supervisado y se puede volver a desplazar a la
velocidad máxima.
Para cada función de seguridad, el usuario puede determinar por separado qué señal de mando debe
permitir el rearranque. A tal fin, las funciones de seguridad disponen de la entrada virtual VIN_xxx_CSF
(Clear Safety Function).
Es necesario definir un rearranque para cada función de seguridad, excepto cuando la función de
seguridad se ha parametrizado con “rearranque automático”. En este caso el rearranque tiene lugar
automáticamente en cuanto se retira la solicitud de la función de seguridad.
Un rearranque solo es posible cuando se ha retirado previamente la solicitud de la función de
seguridad. Una solicitud de una función de seguridad tiene siempre prioridad sobre el rearranque.
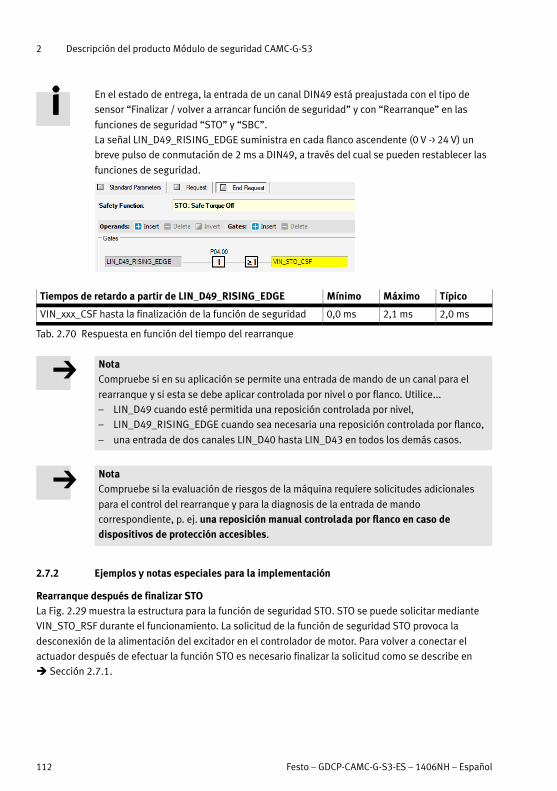
2 Descripción del producto Módulo de seguridad CAMC-G-S3
112 Festo – GDCP-CAMC-G-S3-ES – 1406NH – Español
En el estado de entrega, la entrada de un canal DIN49 está preajustada con el tipo de
sensor “Finalizar / volver a arrancar función de seguridad” y con “Rearranque” en las
funciones de seguridad “STO” y “SBC”.
La señal LIN_D49_RISING_EDGE suministra en cada flanco ascendente (0 V -> 24 V) un
breve pulso de conmutación de 2 ms a DIN49, a través del cual se pueden restablecer las
funciones de seguridad.
Tiempos de retardo a partir de LIN_D49_RISING_EDGE Mínimo Máximo Típico
VIN_xxx_CSF hasta la finalización de la función de seguridad 0,0 ms 2,1 ms 2,0 ms
Tab. 2.70 Respuesta en función del tiempo del rearranque
NotaCompruebe si en su aplicación se permite una entrada de mando de un canal para el
rearranque y si esta se debe aplicar controlada por nivel o por flanco. Utilice...
– LIN_D49 cuando esté permitida una reposición controlada por nivel,
– LIN_D49_RISING_EDGE cuando sea necesaria una reposición controlada por flanco,
– una entrada de dos canales LIN_D40 hasta LIN_D43 en todos los demás casos.
NotaCompruebe si la evaluación de riesgos de la máquina requiere solicitudes adicionales
para el control del rearranque y para la diagnosis de la entrada de mando
correspondiente, p. ej. una reposición manual controlada por flanco en caso dedispositivos de protección accesibles.
2.7.2 Ejemplos y notas especiales para la implementación
Rearranque después de finalizar STOLa Fig. 2.29 muestra la estructura para la función de seguridad STO. STO se puede solicitar mediante
VIN_STO_RSF durante el funcionamiento. La solicitud de la función de seguridad STO provoca la
desconexión de la alimentación del excitador en el controlador de motor. Para volver a conectar el
actuador después de efectuar la función STO es necesario finalizar la solicitud como se describe en
� Sección 2.7.1.
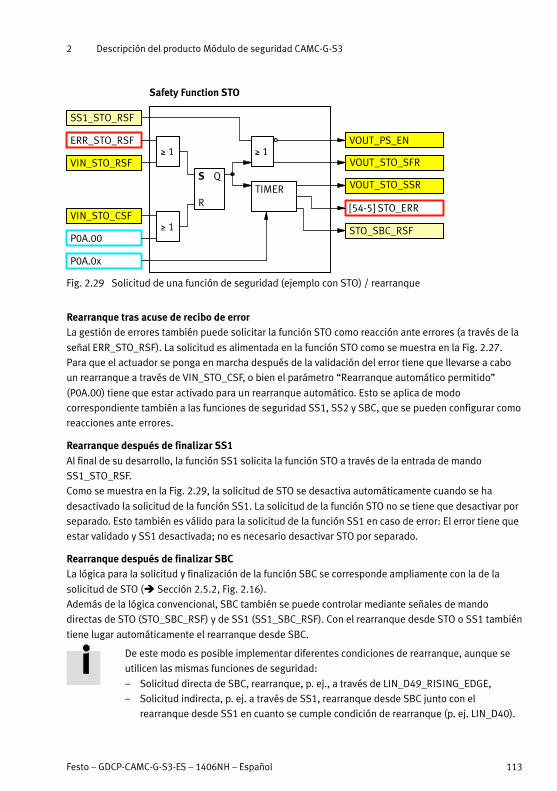
2 Descripción del producto Módulo de seguridad CAMC-G-S3
Festo – GDCP-CAMC-G-S3-ES – 1406NH – Español 113
VOUT_PS_EN
[54-5] STO_ERR
SS1_STO_RSF
VIN_STO_RSF
ERR_STO_RSF
VIN_STO_CSF
P0A.00
Safety Function STO
TIMERS
R
Q
STO_SBC_RSF1
1 1
P0A.0x
VOUT_STO_SFR
VOUT_STO_SSR
Fig. 2.29 Solicitud de una función de seguridad (ejemplo con STO) / rearranque
Rearranque tras acuse de recibo de errorLa gestión de errores también puede solicitar la función STO como reacción ante errores (a través de la
señal ERR_STO_RSF). La solicitud es alimentada en la función STO como se muestra en la Fig. 2.27.
Para que el actuador se ponga en marcha después de la validación del error tiene que llevarse a cabo
un rearranque a través de VIN_STO_CSF, o bien el parámetro “Rearranque automático permitido”
(P0A.00) tiene que estar activado para un rearranque automático. Esto se aplica de modo
correspondiente también a las funciones de seguridad SS1, SS2 y SBC, que se pueden configurar como
reacciones ante errores.
Rearranque después de finalizar SS1
Al final de su desarrollo, la función SS1 solicita la función STO a través de la entrada de mando
SS1_STO_RSF.
Como se muestra en la Fig. 2.29, la solicitud de STO se desactiva automáticamente cuando se ha
desactivado la solicitud de la función SS1. La solicitud de la función STO no se tiene que desactivar por
separado. Esto también es válido para la solicitud de la función SS1 en caso de error: El error tiene que
estar validado y SS1 desactivada; no es necesario desactivar STO por separado.
Rearranque después de finalizar SBCLa lógica para la solicitud y finalización de la función SBC se corresponde ampliamente con la de la
solicitud de STO (� Sección 2.5.2, Fig. 2.16).
Además de la lógica convencional, SBC también se puede controlar mediante señales de mando
directas de STO (STO_SBC_RSF) y de SS1 (SS1_SBC_RSF). Con el rearranque desde STO o SS1 también
tiene lugar automáticamente el rearranque desde SBC.
De este modo es posible implementar diferentes condiciones de rearranque, aunque se
utilicen las mismas funciones de seguridad:
– Solicitud directa de SBC, rearranque, p. ej., a través de LIN_D49_RISING_EDGE,
– Solicitud indirecta, p. ej. a través de SS1, rearranque desde SBC junto con el
rearranque desde SS1 en cuanto se cumple condición de rearranque (p. ej. LIN_D40).
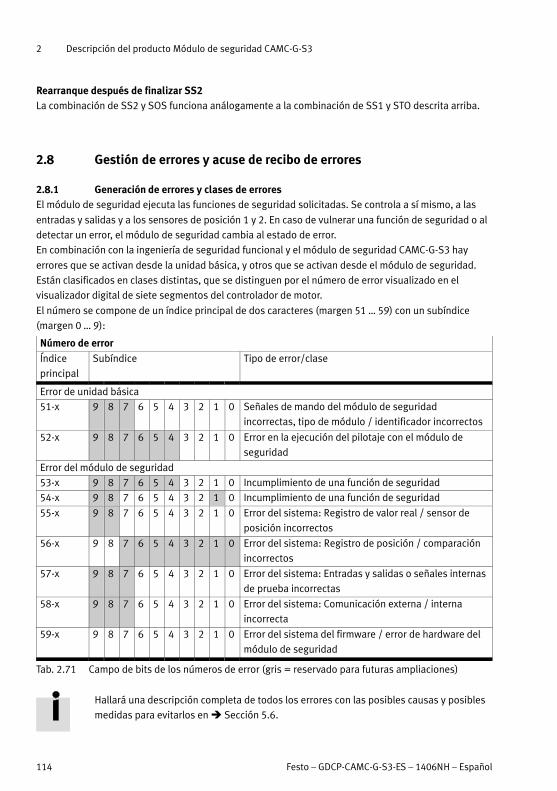
2 Descripción del producto Módulo de seguridad CAMC-G-S3
114 Festo – GDCP-CAMC-G-S3-ES – 1406NH – Español
Rearranque después de finalizar SS2La combinación de SS2 y SOS funciona análogamente a la combinación de SS1 y STO descrita arriba.
2.8 Gestión de errores y acuse de recibo de errores
2.8.1 Generación de errores y clases de erroresEl módulo de seguridad ejecuta las funciones de seguridad solicitadas. Se controla a sí mismo, a las
entradas y salidas y a los sensores de posición 1 y 2. En caso de vulnerar una función de seguridad o al
detectar un error, el módulo de seguridad cambia al estado de error.
En combinación con la ingeniería de seguridad funcional y el módulo de seguridad CAMC-G-S3 hay
errores que se activan desde la unidad básica, y otros que se activan desde el módulo de seguridad.
Están clasificados en clases distintas, que se distinguen por el número de error visualizado en el
visualizador digital de siete segmentos del controlador de motor.
El número se compone de un índice principal de dos caracteres (margen 51 … 59) con un subíndice
(margen 0 … 9):
Número de error
Índice
principal
Subíndice Tipo de error/clase
Error de unidad básica
51-x 9 8 7 6 5 4 3 2 1 0 Señales de mando del módulo de seguridad
incorrectas, tipo de módulo / identificador incorrectos
52-x 9 8 7 6 5 4 3 2 1 0 Error en la ejecución del pilotaje con el módulo de
seguridad
Error del módulo de seguridad
53-x 9 8 7 6 5 4 3 2 1 0 Incumplimiento de una función de seguridad
54-x 9 8 7 6 5 4 3 2 1 0 Incumplimiento de una función de seguridad
55-x 9 8 7 6 5 4 3 2 1 0 Error del sistema: Registro de valor real / sensor de
posición incorrectos
56-x 9 8 7 6 5 4 3 2 1 0 Error del sistema: Registro de posición / comparación
incorrectos
57-x 9 8 7 6 5 4 3 2 1 0 Error del sistema: Entradas y salidas o señales internas
de prueba incorrectas
58-x 9 8 7 6 5 4 3 2 1 0 Error del sistema: Comunicación externa / interna
incorrecta
59-x 9 8 7 6 5 4 3 2 1 0 Error del sistema del firmware / error de hardware del
módulo de seguridad
Tab. 2.71 Campo de bits de los números de error (gris = reservado para futuras ampliaciones)
Hallará una descripción completa de todos los errores con las posibles causas y posibles
medidas para evitarlos en � Sección 5.6.
2 Descripción del producto Módulo de seguridad CAMC-G-S3
Festo – GDCP-CAMC-G-S3-ES – 1406NH – Español 115
Errores de la unidad básica:La unidad básica supervisa durante el funcionamiento la comunicación con el módulo de seguridad y la
plausibilidad de las señales de mando del módulo de seguridad. Después de la puesta en marcha, la
unidad básica comprueba que se haya montado el tipo correcto del módulo de seguridad y si ha tenido
lugar un cambio de módulo. En caso de errores, genera el correspondiente mensaje de error con
reacción ante errores parametrizable (� Descripción de funciones para CMMP-AS-...-M3,
GDCP-CMMP-M3-FW-...).
Errores del módulo de seguridadEl módulo de seguridad ejecuta las funciones de seguridad solicitadas. Se controla a sí mismo, a las
entradas y salidas y a los sensores de posición 1 y 2. En caso de vulnerar una función de seguridad o al
detectar un error, el módulo de seguridad cambia al estado de error. Por ello en el módulo de seguridad
se distingue entre
– errores en caso de vulneración de una condición de seguridad (53-x y 54-x) – el LED está encendido
permanentemente en rojo
y
– errores del sistema (55-x hasta 59-x) – el LED está intermitente en rojo (indicación LED
� Sección 2.10.2)
Los errores son generados por los distintos bloques funcionales en el módulo de seguridad:
Por ejemplo, la función de seguridad SSF genera una señal de error cuando el actuador se mueve fuera
del margen de velocidad supervisado. La señal de error también puede ser muy corta cuando el
actuador abandona el margen permitido solo brevemente.
Por ello, tanto la unidad básica como el módulo de seguridad disponen internamente de una memoria
de diagnosis. Cada error que aparece durante el funcionamiento se registra primero en dicha memoria
de diagnosis y después se guarda temporalmente.
– La memoria de diagnosis de la unidad básica puede recibir más de 200 entradas; al alcanzar este
límite se sobrescriben las entradas más antiguas.
– La memoria de diagnosis del módulo de seguridad abarca 32 entradas.
Sirve como memoria intermedia antes de que el error sea comunicado a la unidad básica y
registrado en la memoria de diagnosis permanente de esta.
La memoria de diagnosis permanente de la unidad básica se conserva también en caso de
un fallo de tensión, de modo que el historial de errores sigue estando disponible. En la
memoria permanente de diagnosis se registran otros eventos además de los errores.
Hallará una descripción detallada en � Sección 2.11.
Adicionalmente, en el visualizador digital de 7 segmentos del controlador de motor se visualiza el
número de error, que se compone de un índice principal y un subíndice. Se visualiza respectivamente el
último error generado con la prioridad más alta (número de error). Los errores posteriores con
prioridad más baja se registran también en la memoria de diagnosis, pero no se emiten en el
visualizador digital de 7 segmentos.
Un estado de error permanece hasta que es validado.
2 Descripción del producto Módulo de seguridad CAMC-G-S3
116 Festo – GDCP-CAMC-G-S3-ES – 1406NH – Español
Vulneración de condiciones de seguridadLas señales “Condición de seguridad vulnerada” de las funciones de seguridad individuales se
agrupan, según la reacción ante errores parametrizada, en un mensaje común de error o en un mensaje
común de advertencia. Con ello es posible, p. ej., controlar el relé de mensajes. Los mensajes comunes
no provocan una reacción ante errores.
La reacción ante errores se determina individualmente para cada función de seguridad
� Secciones 4.6.12 y B.2.
Un error se genera una vez al vulnerar por primera vez la condición de seguridad después de la solicitud
de la función de seguridad. Una vulneración repetida de la condición de seguridad provoca de nuevo un
mensaje de error solo después del acuse de recibo del error.
La salida “Condición de seguridad vulnerada” reproduce el estado actual. Ejemplo:
1. Se solicita SLS.
2. Velocidad fuera del margen permitido } mensaje de error, salida activa.
3. Velocidad de nuevo en el margen permitido } la salida se desactiva.
4. Velocidad nuevamente fuera del margen permitido } salida activa, no hay nuevo mensaje de error.
Reacción ante magnitudes de estado erróneasMientras no se haya solicitado una función de seguridad, la validez de las magnitudes de estado (p. ej.
señal de velocidad, señal de la detección del estado de parada,...) no se supervisa ni se verifica.
Mientras se solicita o alcanza una función de seguridad se supervisala validez de las magnitudes de
estado. Cuando se detecta un error se origina el correspondiente mensaje de error “Condición de
seguridad vulnerada”.
Existe un parámetro avanzado oculto P09.00 con el que se puede activar una máscara
para excluir funciones de seguridad individuales de la generación de estados VOUT_SSR
y VOUT_SCV.
Esto puede resultar conveniente cuando se desea utilizar funciones de seguridad para
observar, p. ej. “Safe Speed Monitor, SSM”, y estas se deben ocultar en los mensajes de
estado de funcionamiento.
En caso necesario diríjase a su representante regional de Festo.
2 Descripción del producto Módulo de seguridad CAMC-G-S3
Festo – GDCP-CAMC-G-S3-ES – 1406NH – Español 117
2.8.2 Parametrización de la reacción ante errores del módulo de seguridadPara muchos errores de los grupos 53-x hasta 57-x se puede configurar la reacción ante errores en un
amplio margen. Para algunos errores críticos la selección está limitada o no permitida. Cada error
genera la reacción que le ha sido asignada, independientemente del orden temporal de su aparición. Si
hay varios errores al mismo tiempo, tendrán lugar también varias reacciones ante errores
simultáneamente.
En caso de vulneración de una condición de seguridad, el módulo de seguridad tienen que iniciar una
parada definida del eje, dependiendo de la categoría de parada requerida (STO, SS1, SS2 o SBC).
En errores del sistema, el volumen de la reacción ante errores necesaria depende de si la función
segura del módulo de seguridad todavía se puede garantizar o no.
Están disponibles las siguientes reacciones ante errores (empezando por las de prioridad más alta):
[8] Solicitud de STO + SBC + poner todas las salidas digitales en “0”
[7] Solicitud de STO + SBC
[6] Solicitud de STO
[5] Solicitud de SS1 + SBC
[4] Solicitud de SS1
[3] Solicitud de SS2
[2] Generación de una advertencia (pantalla del controlador de motor), no hay más reacciones
[1] Ninguna reacción, solo entrada en la memoria de diagnosis
[0] Ninguna reacción, ninguna entrada en la memoria de diagnosis
NotaCuando hay un error, en caso de duda debe desconectarse el actuador y dejarlo sin
energía lo más rápido posible (STO), la unidad de bloqueo o el freno de sostenimiento
se deben aplicar (SBC) y se deben desconectar todas las salidas seguras; esto
corresponde a la reacción ante errores [8].
Este estado en el “Estado básico seguro” del módulo de seguridad.
– Ya no es posible suministrar energía al motor.
– Un movimiento se detiene a través de una unidad de bloqueo externa con
propiedades de freno de emergencia.
– La electrónica subsiguiente se desconecta / pasa al estado seguro.
Compruebe qué reacción ante errores es necesaria para su aplicación de seguridad; en
caso de duda seleccione la de mayor prioridad [8].
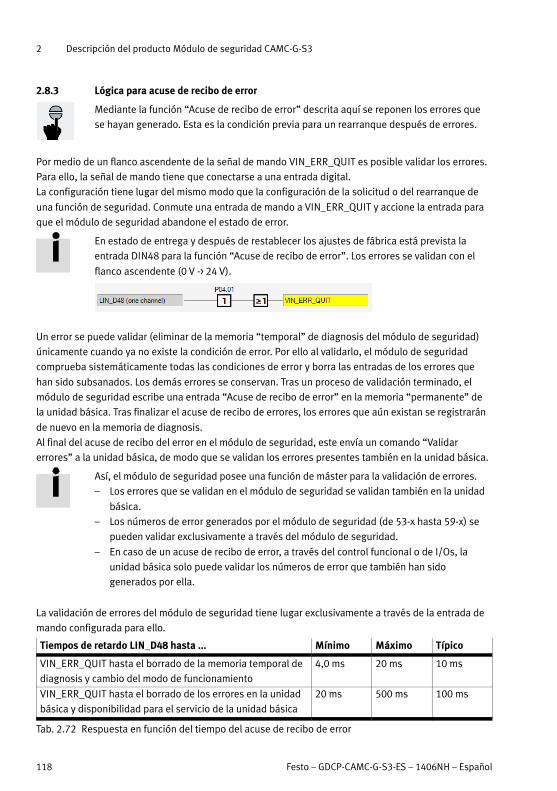
2 Descripción del producto Módulo de seguridad CAMC-G-S3
118 Festo – GDCP-CAMC-G-S3-ES – 1406NH – Español
2.8.3 Lógica para acuse de recibo de error
Mediante la función “Acuse de recibo de error” descrita aquí se reponen los errores que
se hayan generado. Esta es la condición previa para un rearranque después de errores.
Por medio de un flanco ascendente de la señal de mando VIN_ERR_QUIT es posible validar los errores.
Para ello, la señal de mando tiene que conectarse a una entrada digital.
La configuración tiene lugar del mismo modo que la configuración de la solicitud o del rearranque de
una función de seguridad. Conmute una entrada de mando a VIN_ERR_QUIT y accione la entrada para
que el módulo de seguridad abandone el estado de error.
En estado de entrega y después de restablecer los ajustes de fábrica está prevista la
entrada DIN48 para la función “Acuse de recibo de error”. Los errores se validan con el
flanco ascendente (0 V -> 24 V).
Un error se puede validar (eliminar de la memoria “temporal” de diagnosis del módulo de seguridad)
únicamente cuando ya no existe la condición de error. Por ello al validarlo, el módulo de seguridad
comprueba sistemáticamente todas las condiciones de error y borra las entradas de los errores que
han sido subsanados. Los demás errores se conservan. Tras un proceso de validación terminado, el
módulo de seguridad escribe una entrada “Acuse de recibo de error” en la memoria “permanente” de
la unidad básica. Tras finalizar el acuse de recibo de errores, los errores que aún existan se registrarán
de nuevo en la memoria de diagnosis.
Al final del acuse de recibo del error en el módulo de seguridad, este envía un comando “Validar
errores” a la unidad básica, de modo que se validan los errores presentes también en la unidad básica.
Así, el módulo de seguridad posee una función de máster para la validación de errores.
– Los errores que se validan en el módulo de seguridad se validan también en la unidad
básica.
– Los números de error generados por el módulo de seguridad (de 53-x hasta 59-x) se
pueden validar exclusivamente a través del módulo de seguridad.
– En caso de un acuse de recibo de error, a través del control funcional o de I/Os, la
unidad básica solo puede validar los números de error que también han sido
generados por ella.
La validación de errores del módulo de seguridad tiene lugar exclusivamente a través de la entrada de
mando configurada para ello.
Tiempos de retardo LIN_D48 hasta ... Mínimo Máximo Típico
VIN_ERR_QUIT hasta el borrado de la memoria temporal de
diagnosis y cambio del modo de funcionamiento
4,0 ms 20 ms 10 ms
VIN_ERR_QUIT hasta el borrado de los errores en la unidad
básica y disponibilidad para el servicio de la unidad básica
20 ms 500 ms 100 ms
Tab. 2.72 Respuesta en función del tiempo del acuse de recibo de error
2 Descripción del producto Módulo de seguridad CAMC-G-S3
Festo – GDCP-CAMC-G-S3-ES – 1406NH – Español 119
NotaEn caso de vulneración una condición de seguridad, el error se puede validar solo
cuando las magnitudes de estado del actuador se encuentran de nuevo en el margen
permitido.
Ejemplo - Vulneración de SOS:
Después de haber solicitado SOS, el eje se ha desplazado más allá del margen de tolerancia –>
Se genera el error [54-3] Vulneración de SOS. El error se puede validad solo después de:
– que el eje se haya desplazado de nuevo al margen permitido o (alternativamente)
– que haya finalizado la solicitud de la función de seguridad SOS (rearranque).
Como consecuencia de la vulneración de SOS se ejecuta otra función de seguridad, en este ejemplo
SS1, como reacción ante errores.
Para un rearranque después de una “Vulneración de SOS” es necesaria la siguiente secuencia:
1. Accionamiento de rearranque
–> Finaliza la función SOS, SS1 (como reacción ante errores) se sigue ejecutando
2. Acuse de recido de error
–> Borra el error “Vulneración SOS”
3. Rearranque
–> Finaliza la función de seguridad SS1 –> El eje/motor puede volver a arrancar
Los errores de las siguientes funciones de seguridad también se pueden validar con la
función de seguridad solicitada:
STO, SS1, SBC, USF/SSF con los tres atributos SLS, SSR, SSM.
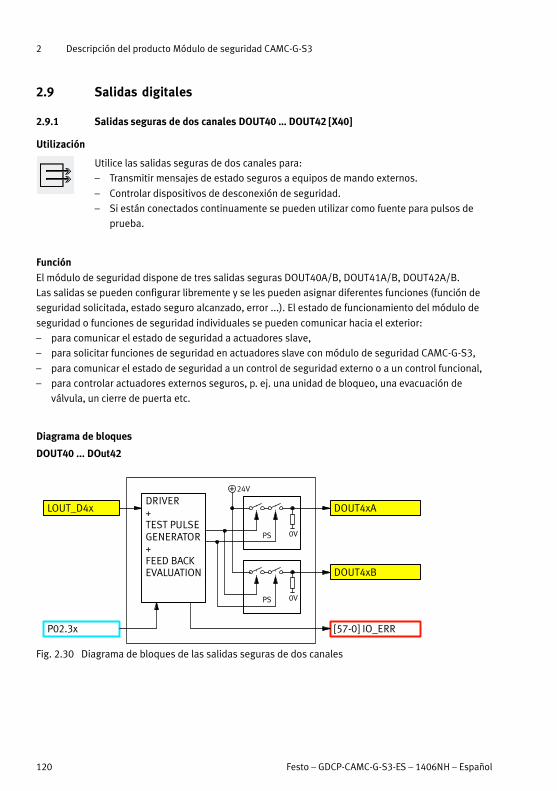
2 Descripción del producto Módulo de seguridad CAMC-G-S3
120 Festo – GDCP-CAMC-G-S3-ES – 1406NH – Español
2.9 Salidas digitales
2.9.1 Salidas seguras de dos canales DOUT40 … DOUT42 [X40]
Utilización
Utilice las salidas seguras de dos canales para:
– Transmitir mensajes de estado seguros a equipos de mando externos.
– Controlar dispositivos de desconexión de seguridad.
– Si están conectados continuamente se pueden utilizar como fuente para pulsos de
prueba.
Función
El módulo de seguridad dispone de tres salidas seguras DOUT40A/B, DOUT41A/B, DOUT42A/B.
Las salidas se pueden configurar libremente y se les pueden asignar diferentes funciones (función de
seguridad solicitada, estado seguro alcanzado, error ...). El estado de funcionamiento del módulo de
seguridad o funciones de seguridad individuales se pueden comunicar hacia el exterior:
– para comunicar el estado de seguridad a actuadores slave,
– para solicitar funciones de seguridad en actuadores slave con módulo de seguridad CAMC-G-S3,
– para comunicar el estado de seguridad a un control de seguridad externo o a un control funcional,
– para controlar actuadores externos seguros, p. ej. una unidad de bloqueo, una evacuación de
válvula, un cierre de puerta etc.
Diagrama de bloques
DOUT4xA
[57-0] IO_ERR
LOUT_D4x
P02.3x
DOUT40 ... DOut42
DRIVER+ TEST PULSE GENERATOR+ FEED BACK EVALUATION DOUT4xB
0VPS
+ 24V
0VPS
Fig. 2.30 Diagrama de bloques de las salidas seguras de dos canales
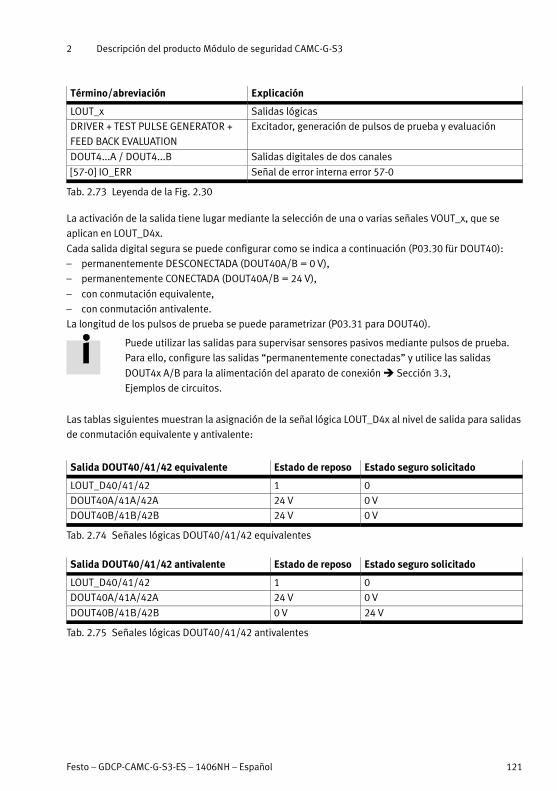
2 Descripción del producto Módulo de seguridad CAMC-G-S3
Festo – GDCP-CAMC-G-S3-ES – 1406NH – Español 121
Término/abreviación Explicación
LOUT_x Salidas lógicas
DRIVER + TEST PULSE GENERATOR +
FEED BACK EVALUATION
Excitador, generación de pulsos de prueba y evaluación
DOUT4...A / DOUT4...B Salidas digitales de dos canales
[57-0] IO_ERR Señal de error interna error 57-0
Tab. 2.73 Leyenda de la Fig. 2.30
La activación de la salida tiene lugar mediante la selección de una o varias señales VOUT_x, que se
aplican en LOUT_D4x.
Cada salida digital segura se puede configurar como se indica a continuación (P03.30 für DOUT40):
– permanentemente DESCONECTADA (DOUT40A/B = 0 V),
– permanentemente CONECTADA (DOUT40A/B = 24 V),
– con conmutación equivalente,
– con conmutación antivalente.
La longitud de los pulsos de prueba se puede parametrizar (P03.31 para DOUT40).
Puede utilizar las salidas para supervisar sensores pasivos mediante pulsos de prueba.
Para ello, configure las salidas “permanentemente conectadas” y utilice las salidas
DOUT4x A/B para la alimentación del aparato de conexión � Sección 3.3,
Ejemplos de circuitos.
Las tablas siguientes muestran la asignación de la señal lógica LOUT_D4x al nivel de salida para salidas
de conmutación equivalente y antivalente:
Salida DOUT40/41/42 equivalente Estado de reposo Estado seguro solicitado
LOUT_D40/41/42 1 0
DOUT40A/41A/42A 24 V 0 V
DOUT40B/41B/42B 24 V 0 V
Tab. 2.74 Señales lógicas DOUT40/41/42 equivalentes
Salida DOUT40/41/42 antivalente Estado de reposo Estado seguro solicitado
LOUT_D40/41/42 1 0
DOUT40A/41A/42A 24 V 0 V
DOUT40B/41B/42B 0 V 24 V
Tab. 2.75 Señales lógicas DOUT40/41/42 antivalentes
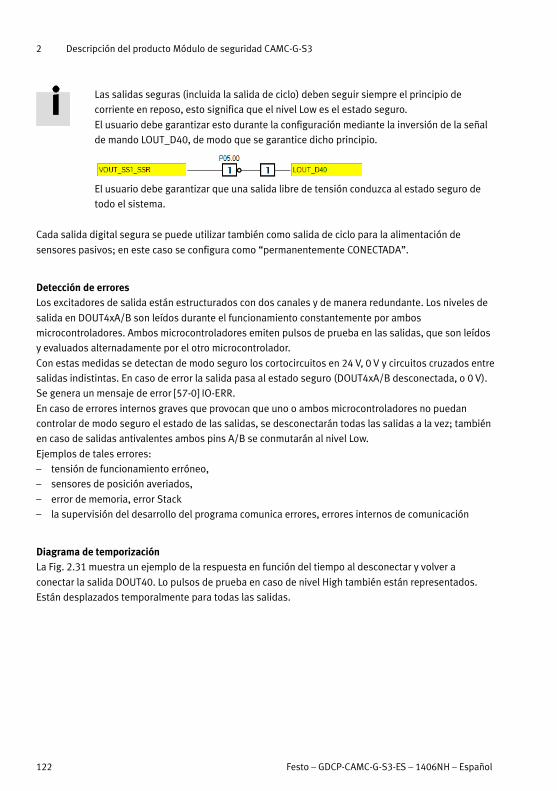
2 Descripción del producto Módulo de seguridad CAMC-G-S3
122 Festo – GDCP-CAMC-G-S3-ES – 1406NH – Español
Las salidas seguras (incluida la salida de ciclo) deben seguir siempre el principio de
corriente en reposo, esto significa que el nivel Low es el estado seguro.
El usuario debe garantizar esto durante la configuración mediante la inversión de la señal
de mando LOUT_D40, de modo que se garantice dicho principio.
El usuario debe garantizar que una salida libre de tensión conduzca al estado seguro de
todo el sistema.
Cada salida digital segura se puede utilizar también como salida de ciclo para la alimentación de
sensores pasivos; en este caso se configura como “permanentemente CONECTADA”.
Detección de erroresLos excitadores de salida están estructurados con dos canales y de manera redundante. Los niveles de
salida en DOUT4xA/B son leídos durante el funcionamiento constantemente por ambos
microcontroladores. Ambos microcontroladores emiten pulsos de prueba en las salidas, que son leídos
y evaluados alternadamente por el otro microcontrolador.
Con estas medidas se detectan de modo seguro los cortocircuitos en 24 V, 0 V y circuitos cruzados entre
salidas indistintas. En caso de error la salida pasa al estado seguro (DOUT4xA/B desconectada, o 0 V).
Se genera un mensaje de error [57-0] IO-ERR.
En caso de errores internos graves que provocan que uno o ambos microcontroladores no puedan
controlar de modo seguro el estado de las salidas, se desconectarán todas las salidas a la vez; también
en caso de salidas antivalentes ambos pins A/B se conmutarán al nivel Low.
Ejemplos de tales errores:
– tensión de funcionamiento erróneo,
– sensores de posición averiados,
– error de memoria, error Stack
– la supervisión del desarrollo del programa comunica errores, errores internos de comunicación
Diagrama de temporizaciónLa Fig. 2.31 muestra un ejemplo de la respuesta en función del tiempo al desconectar y volver a
conectar la salida DOUT40. Lo pulsos de prueba en caso de nivel High también están representados.
Están desplazados temporalmente para todas las salidas.
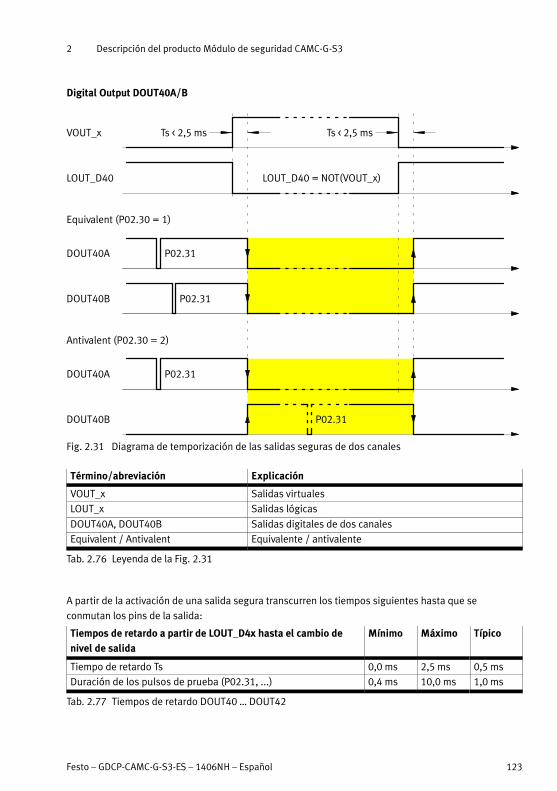
2 Descripción del producto Módulo de seguridad CAMC-G-S3
Festo – GDCP-CAMC-G-S3-ES – 1406NH – Español 123
DOUT40A
DOUT40B
DOUT40A
DOUT40B
VOUT_x Ts < 2,5 ms
P02.31
P02.31
P02.31
P02.31
Digital Output DOUT40A/B
Equivalent (P02.30 = 1)
Antivalent (P02.30 = 2)
Ts < 2,5 ms
LOUT_D40 LOUT_D40 = NOT(VOUT_x)
Fig. 2.31 Diagrama de temporización de las salidas seguras de dos canales
Término/abreviación Explicación
VOUT_x Salidas virtuales
LOUT_x Salidas lógicas
DOUT40A, DOUT40B Salidas digitales de dos canales
Equivalent / Antivalent Equivalente / antivalente
Tab. 2.76 Leyenda de la Fig. 2.31
A partir de la activación de una salida segura transcurren los tiempos siguientes hasta que se
conmutan los pins de la salida:
Tiempos de retardo a partir de LOUT_D4x hasta el cambio denivel de salida
Mínimo Máximo Típico
Tiempo de retardo Ts 0,0 ms 2,5 ms 0,5 ms
Duración de los pulsos de prueba (P02.31, ...) 0,4 ms 10,0 ms 1,0 ms
Tab. 2.77 Tiempos de retardo DOUT40 … DOUT42
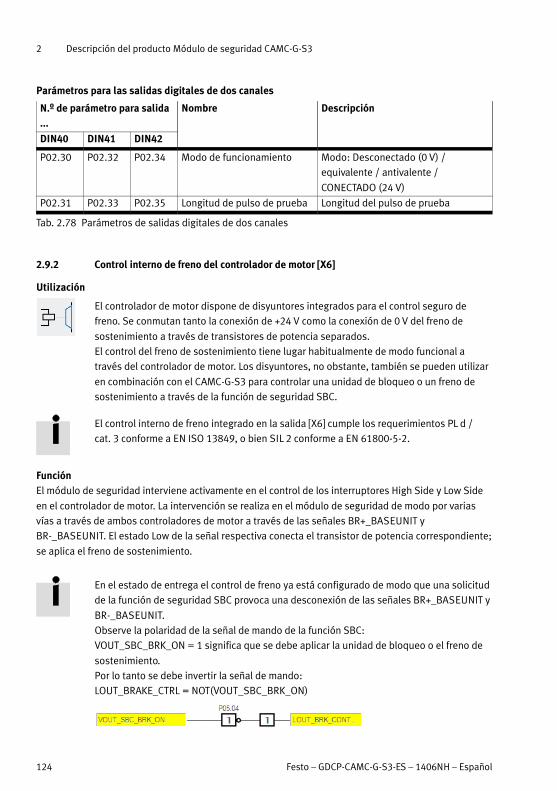
2 Descripción del producto Módulo de seguridad CAMC-G-S3
124 Festo – GDCP-CAMC-G-S3-ES – 1406NH – Español
Parámetros para las salidas digitales de dos canales
N.º de parámetro para salida...
Nombre Descripción
DIN40 DIN41 DIN42
P02.30 P02.32 P02.34 Modo de funcionamiento Modo: Desconectado (0 V) /
equivalente / antivalente /
CONECTADO (24 V)
P02.31 P02.33 P02.35 Longitud de pulso de prueba Longitud del pulso de prueba
Tab. 2.78 Parámetros de salidas digitales de dos canales
2.9.2 Control interno de freno del controlador de motor [X6]
Utilización
El controlador de motor dispone de disyuntores integrados para el control seguro de
freno. Se conmutan tanto la conexión de +24 V como la conexión de 0 V del freno de
sostenimiento a través de transistores de potencia separados.
El control del freno de sostenimiento tiene lugar habitualmente de modo funcional a
través del controlador de motor. Los disyuntores, no obstante, también se pueden utilizar
en combinación con el CAMCGS3 para controlar una unidad de bloqueo o un freno de
sostenimiento a través de la función de seguridad SBC.
El control interno de freno integrado en la salida [X6] cumple los requerimientos PL d /
cat. 3 conforme a EN ISO 13849, o bien SIL 2 conforme a EN 61800-5-2.
FunciónEl módulo de seguridad interviene activamente en el control de los interruptores High Side y Low Side
en el controlador de motor. La intervención se realiza en el módulo de seguridad de modo por varias
vías a través de ambos controladores de motor a través de las señales BR+_BASEUNIT y
BR-_BASEUNIT. El estado Low de la señal respectiva conecta el transistor de potencia correspondiente;
se aplica el freno de sostenimiento.
En el estado de entrega el control de freno ya está configurado de modo que una solicitud
de la función de seguridad SBC provoca una desconexión de las señales BR+_BASEUNIT y
BR-_BASEUNIT.
Observe la polaridad de la señal de mando de la función SBC:
VOUT_SBC_BRK_ON = 1 significa que se debe aplicar la unidad de bloqueo o el freno de
sostenimiento.
Por lo tanto se debe invertir la señal de mando:
LOUT_BRAKE_CTRL = NOT(VOUT_SBC_BRK_ON)
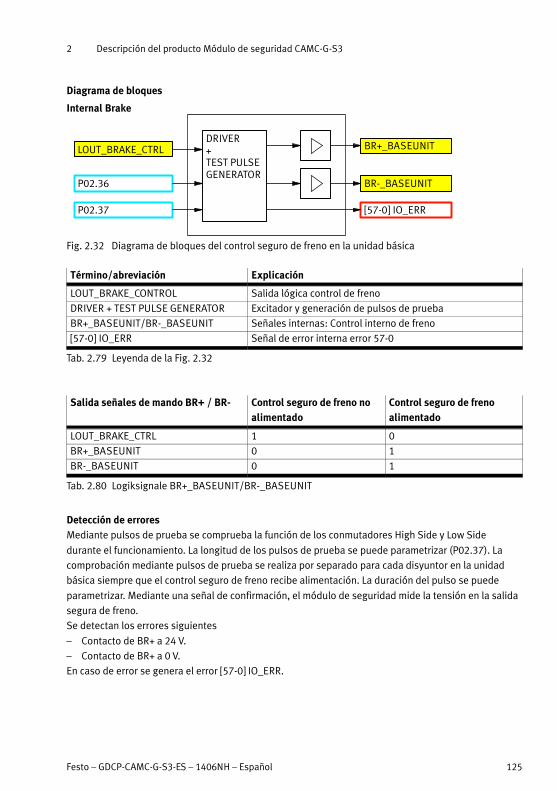
2 Descripción del producto Módulo de seguridad CAMC-G-S3
Festo – GDCP-CAMC-G-S3-ES – 1406NH – Español 125
Diagrama de bloques
BR+_BASEUNITLOUT_BRAKE_CTRL
P02.37
Internal Brake
DRIVER+ TEST PULSE GENERATOR
BR-_BASEUNIT
[57-0] IO_ERR
P02.36
Fig. 2.32 Diagrama de bloques del control seguro de freno en la unidad básica
Término/abreviación Explicación
LOUT_BRAKE_CONTROL Salida lógica control de freno
DRIVER + TEST PULSE GENERATOR Excitador y generación de pulsos de prueba
BR+_BASEUNIT/BR-_BASEUNIT Señales internas: Control interno de freno
[57-0] IO_ERR Señal de error interna error 57-0
Tab. 2.79 Leyenda de la Fig. 2.32
Salida señales de mando BR+ / BR- Control seguro de freno noalimentado
Control seguro de frenoalimentado
LOUT_BRAKE_CTRL 1 0
BR+_BASEUNIT 0 1
BR-_BASEUNIT 0 1
Tab. 2.80 Logiksignale BR+_BASEUNIT/BR-_BASEUNIT
Detección de erroresMediante pulsos de prueba se comprueba la función de los conmutadores High Side y Low Side
durante el funcionamiento. La longitud de los pulsos de prueba se puede parametrizar (P02.37). La
comprobación mediante pulsos de prueba se realiza por separado para cada disyuntor en la unidad
básica siempre que el control seguro de freno recibe alimentación. La duración del pulso se puede
parametrizar. Mediante una señal de confirmación, el módulo de seguridad mide la tensión en la salida
segura de freno.
Se detectan los errores siguientes
– Contacto de BR+ a 24 V.
– Contacto de BR+ a 0 V.
En caso de error se genera el error [57-0] IO_ERR.
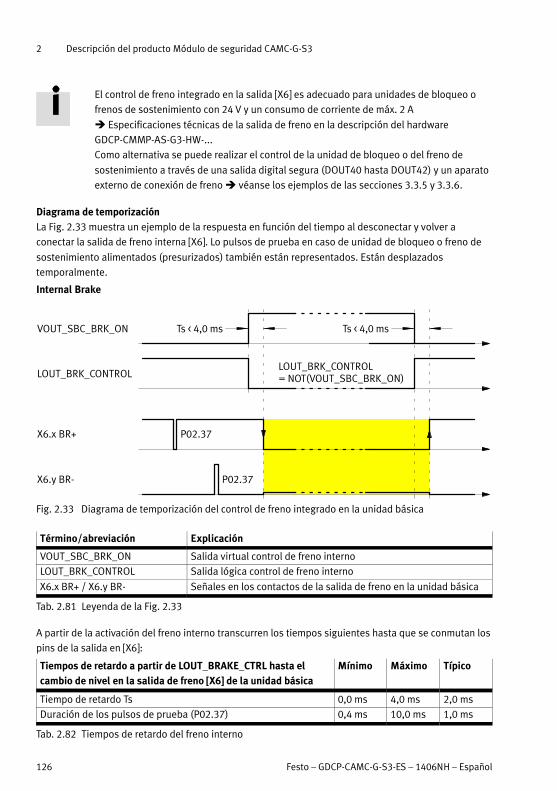
2 Descripción del producto Módulo de seguridad CAMC-G-S3
126 Festo – GDCP-CAMC-G-S3-ES – 1406NH – Español
El control de freno integrado en la salida [X6] es adecuado para unidades de bloqueo o
frenos de sostenimiento con 24 V y un consumo de corriente de máx. 2 A
� Especificaciones técnicas de la salida de freno en la descripción del hardware
GDCP-CMMP-AS-G3-HW-...
Como alternativa se puede realizar el control de la unidad de bloqueo o del freno de
sostenimiento a través de una salida digital segura (DOUT40 hasta DOUT42) y un aparato
externo de conexión de freno � véanse los ejemplos de las secciones 3.3.5 y 3.3.6.
Diagrama de temporizaciónLa Fig. 2.33 muestra un ejemplo de la respuesta en función del tiempo al desconectar y volver a
conectar la salida de freno interna [X6]. Lo pulsos de prueba en caso de unidad de bloqueo o freno de
sostenimiento alimentados (presurizados) también están representados. Están desplazados
temporalmente.
X6.x BR+
X6.y BR-
VOUT_SBC_BRK_ON Ts < 4,0 ms
P02.37
Ts < 4,0 ms
LOUT_BRK_CONTROLLOUT_BRK_CONTROL = NOT(VOUT_SBC_BRK_ON)
P02.37
Internal Brake
Fig. 2.33 Diagrama de temporización del control de freno integrado en la unidad básica
Término/abreviación Explicación
VOUT_SBC_BRK_ON Salida virtual control de freno interno
LOUT_BRK_CONTROL Salida lógica control de freno interno
X6.x BR+ / X6.y BR- Señales en los contactos de la salida de freno en la unidad básica
Tab. 2.81 Leyenda de la Fig. 2.33
A partir de la activación del freno interno transcurren los tiempos siguientes hasta que se conmutan los
pins de la salida en [X6]:
Tiempos de retardo a partir de LOUT_BRAKE_CTRL hasta elcambio de nivel en la salida de freno [X6] de la unidad básica
Mínimo Máximo Típico
Tiempo de retardo Ts 0,0 ms 4,0 ms 2,0 ms
Duración de los pulsos de prueba (P02.37) 0,4 ms 10,0 ms 1,0 ms
Tab. 2.82 Tiempos de retardo del freno interno
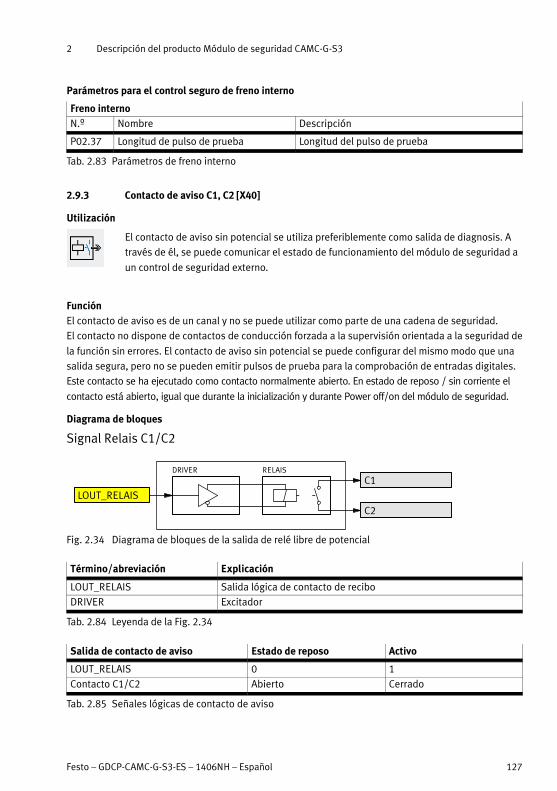
2 Descripción del producto Módulo de seguridad CAMC-G-S3
Festo – GDCP-CAMC-G-S3-ES – 1406NH – Español 127
Parámetros para el control seguro de freno interno
Freno internoN.º Nombre Descripción
P02.37 Longitud de pulso de prueba Longitud del pulso de prueba
Tab. 2.83 Parámetros de freno interno
2.9.3 Contacto de aviso C1, C2 [X40]
Utilización
El contacto de aviso sin potencial se utiliza preferiblemente como salida de diagnosis. A
través de él, se puede comunicar el estado de funcionamiento del módulo de seguridad a
un control de seguridad externo.
FunciónEl contacto de aviso es de un canal y no se puede utilizar como parte de una cadena de seguridad.
El contacto no dispone de contactos de conducción forzada a la supervisión orientada a la seguridad de
la función sin errores. El contacto de aviso sin potencial se puede configurar del mismo modo que una
salida segura, pero no se pueden emitir pulsos de prueba para la comprobación de entradas digitales.
Este contacto se ha ejecutado como contacto normalmente abierto. En estado de reposo / sin corriente el
contacto está abierto, igual que durante la inicialización y durante Power off/on del módulo de seguridad.
Diagrama de bloques
C1
LOUT_RELAIS
Signal Relais C1/C2
DRIVER
C2
RELAIS
Fig. 2.34 Diagrama de bloques de la salida de relé libre de potencial
Término/abreviación Explicación
LOUT_RELAIS Salida lógica de contacto de recibo
DRIVER Excitador
Tab. 2.84 Leyenda de la Fig. 2.34
Salida de contacto de aviso Estado de reposo Activo
LOUT_RELAIS 0 1
Contacto C1/C2 Abierto Cerrado
Tab. 2.85 Señales lógicas de contacto de aviso
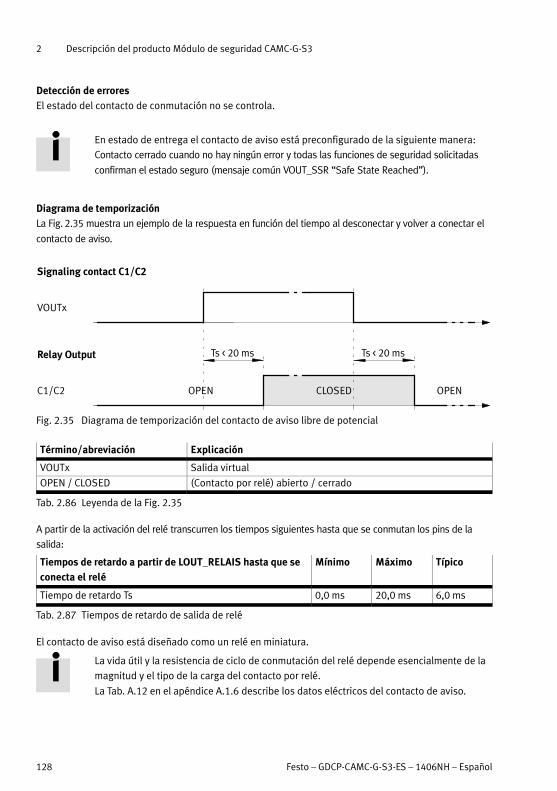
2 Descripción del producto Módulo de seguridad CAMC-G-S3
128 Festo – GDCP-CAMC-G-S3-ES – 1406NH – Español
Detección de erroresEl estado del contacto de conmutación no se controla.
En estado de entrega el contacto de aviso está preconfigurado de la siguiente manera:
Contacto cerrado cuando no hay ningún error y todas las funciones de seguridad solicitadas
confirman el estado seguro (mensaje común VOUT_SSR “Safe State Reached”).
Diagrama de temporizaciónLa Fig. 2.35 muestra un ejemplo de la respuesta en función del tiempo al desconectar y volver a conectar el
contacto de aviso.
VOUTx
Signaling contact C1/C2
C1/C2
Ts < 20 msRelay Output
OPEN
Ts < 20 ms
CLOSED OPEN
Fig. 2.35 Diagrama de temporización del contacto de aviso libre de potencial
Término/abreviación Explicación
VOUTx Salida virtual
OPEN / CLOSED (Contacto por relé) abierto / cerrado
Tab. 2.86 Leyenda de la Fig. 2.35
A partir de la activación del relé transcurren los tiempos siguientes hasta que se conmutan los pins de la
salida:
Tiempos de retardo a partir de LOUT_RELAIS hasta que seconecta el relé
Mínimo Máximo Típico
Tiempo de retardo Ts 0,0 ms 20,0 ms 6,0 ms
Tab. 2.87 Tiempos de retardo de salida de relé
El contacto de aviso está diseñado como un relé en miniatura.
La vida útil y la resistencia de ciclo de conmutación del relé depende esencialmente de la
magnitud y el tipo de la carga del contacto por relé.
La Tab. A.12 en el apéndice A.1.6 describe los datos eléctricos del contacto de aviso.
2 Descripción del producto Módulo de seguridad CAMC-G-S3
Festo – GDCP-CAMC-G-S3-ES – 1406NH – Español 129
2.9.4 Alimentación auxiliar +24 V [X40]La alimentación auxiliar se puede utilizar durante el uso del contacto de recibo C1/C2 o para la
alimentación de sensores activos externos.
El módulo de seguridad pone a disposición una tensión continua de 24 V en la interfaz X40 con una
capacidad de carga de 100 mA como máximo.
La salida para 24 V está protegida contra inversión de polaridad y cortocircuito mediante un PTC.
La Tab. A.13 en el apéndice A.1.7 describe los datos eléctricos de la alimentación auxiliar.
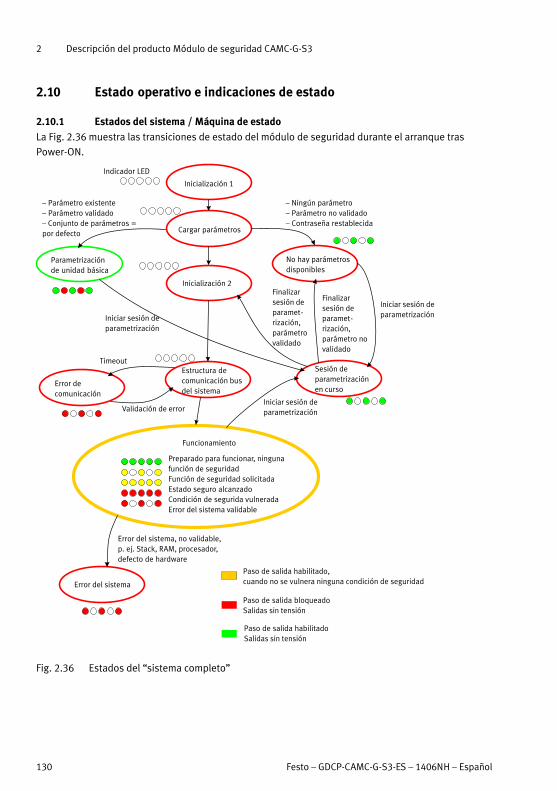
2 Descripción del producto Módulo de seguridad CAMC-G-S3
130 Festo – GDCP-CAMC-G-S3-ES – 1406NH – Español
2.10 Estado operativo e indicaciones de estado
2.10.1 Estados del sistema / Máquina de estado
La Fig. 2.36 muestra las transiciones de estado del módulo de seguridad durante el arranque tras
Power-ON.
Paso de salida habilitadoSalidas sin tensión
Paso de salida bloqueadoSalidas sin tensión
Paso de salida habilitado, cuando no se vulnera ninguna condición de seguridadError del sistema
Error del sistema, no validable,p. ej. Stack, RAM, procesador,defecto de hardware
Preparado para funcionar, ningunafunción de seguridadFunción de seguridad solicitadaEstado seguro alcanzadoCondición de segurida vulneradaError del sistema validable
Funcionamiento
Iniciar sesión deparametrizaciónValidación de error
Error decomunicación
Timeout
Iniciar sesión deparametrización
Estructura decomunicación busdel sistema
Sesión deparametrizaciónen curso
Finalizarsesión deparametrización,parámetrovalidado
Finalizarsesión deparametrización,parámetro novalidado
Iniciar sesión deparametrización
Parametrizaciónde unidad básica
Cargar parámetros
No hay parámetrosdisponibles
Inicialización 2
Inicialización 1
Indicador LED
– Parámetro existente– Parámetro validado– Conjunto de parámetros =por defecto
– Ningún parámetro – Parámetro no validado– Contraseña restablecida
Fig. 2.36 Estados del “sistema completo”
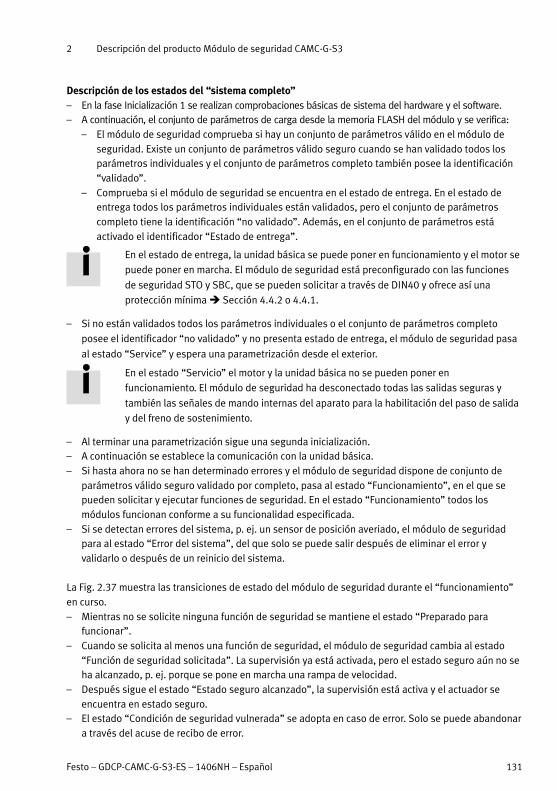
2 Descripción del producto Módulo de seguridad CAMC-G-S3
Festo – GDCP-CAMC-G-S3-ES – 1406NH – Español 131
Descripción de los estados del “sistema completo”– En la fase Inicialización 1 se realizan comprobaciones básicas de sistema del hardware y el software.– A continuación, el conjunto de parámetros de carga desde la memoria FLASH del módulo y se verifica:
– El módulo de seguridad comprueba si hay un conjunto de parámetros válido en el módulo deseguridad. Existe un conjunto de parámetros válido seguro cuando se han validado todos losparámetros individuales y el conjunto de parámetros completo también posee la identificación“validado”.
– Comprueba si el módulo de seguridad se encuentra en el estado de entrega. En el estado deentrega todos los parámetros individuales están validados, pero el conjunto de parámetroscompleto tiene la identificación “no validado”. Además, en el conjunto de parámetros estáactivado el identificador “Estado de entrega”.
En el estado de entrega, la unidad básica se puede poner en funcionamiento y el motor se
puede poner en marcha. El módulo de seguridad está preconfigurado con las funciones
de seguridad STO y SBC, que se pueden solicitar a través de DIN40 y ofrece así una
protección mínima � Sección 4.4.2 o 4.4.1.
– Si no están validados todos los parámetros individuales o el conjunto de parámetros completo
posee el identificador “no validado” y no presenta estado de entrega, el módulo de seguridad pasa
al estado “Service” y espera una parametrización desde el exterior.
En el estado “Servicio” el motor y la unidad básica no se pueden poner en
funcionamiento. El módulo de seguridad ha desconectado todas las salidas seguras y
también las señales de mando internas del aparato para la habilitación del paso de salida
y del freno de sostenimiento.
– Al terminar una parametrización sigue una segunda inicialización.– A continuación se establece la comunicación con la unidad básica.– Si hasta ahora no se han determinado errores y el módulo de seguridad dispone de conjunto de
parámetros válido seguro validado por completo, pasa al estado “Funcionamiento”, en el que sepueden solicitar y ejecutar funciones de seguridad. En el estado “Funcionamiento” todos losmódulos funcionan conforme a su funcionalidad especificada.
– Si se detectan errores del sistema, p. ej. un sensor de posición averiado, el módulo de seguridadpara al estado “Error del sistema”, del que solo se puede salir después de eliminar el error yvalidarlo o después de un reinicio del sistema.
La Fig. 2.37 muestra las transiciones de estado del módulo de seguridad durante el “funcionamiento”en curso.– Mientras no se solicite ninguna función de seguridad se mantiene el estado “Preparado para
funcionar”.– Cuando se solicita al menos una función de seguridad, el módulo de seguridad cambia al estado
“Función de seguridad solicitada”. La supervisión ya está activada, pero el estado seguro aún no seha alcanzado, p. ej. porque se pone en marcha una rampa de velocidad.
– Después sigue el estado “Estado seguro alcanzado”, la supervisión está activa y el actuador seencuentra en estado seguro.
– El estado “Condición de seguridad vulnerada” se adopta en caso de error. Solo se puede abandonara través del acuse de recibo de error.
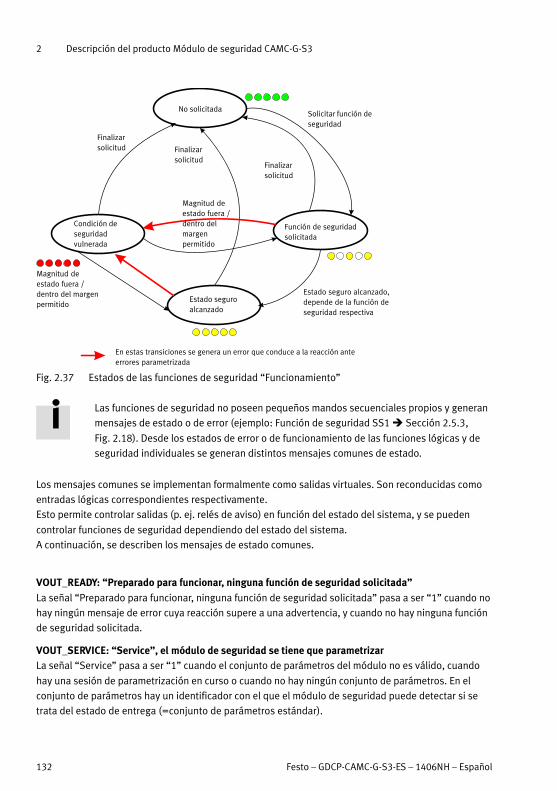
2 Descripción del producto Módulo de seguridad CAMC-G-S3
132 Festo – GDCP-CAMC-G-S3-ES – 1406NH – Español
Solicitar función deseguridad
No solicitada
En estas transiciones se genera un error que conduce a la reacción anteerrores parametrizada
Función de seguridadsolicitada
Finalizarsolicitud
Finalizarsolicitud
Finalizarsolicitud
Condición deseguridadvulnerada
Estado seguroalcanzado
Estado seguro alcanzado,depende de la función deseguridad respectiva
Magnitud deestado fuera /dentro del margenpermitido
Magnitud deestado fuera /dentro delmargenpermitido
Fig. 2.37 Estados de las funciones de seguridad “Funcionamiento”
Las funciones de seguridad no poseen pequeños mandos secuenciales propios y generan
mensajes de estado o de error (ejemplo: Función de seguridad SS1 � Sección 2.5.3,
Fig. 2.18). Desde los estados de error o de funcionamiento de las funciones lógicas y de
seguridad individuales se generan distintos mensajes comunes de estado.
Los mensajes comunes se implementan formalmente como salidas virtuales. Son reconducidas como
entradas lógicas correspondientes respectivamente.
Esto permite controlar salidas (p. ej. relés de aviso) en función del estado del sistema, y se pueden
controlar funciones de seguridad dependiendo del estado del sistema.
A continuación, se describen los mensajes de estado comunes.
VOUT_READY: “Preparado para funcionar, ninguna función de seguridad solicitada”
La señal “Preparado para funcionar, ninguna función de seguridad solicitada” pasa a ser “1” cuando no
hay ningún mensaje de error cuya reacción supere a una advertencia, y cuando no hay ninguna función
de seguridad solicitada.
VOUT_SERVICE: “Service”, el módulo de seguridad se tiene que parametrizarLa señal “Service” pasa a ser “1” cuando el conjunto de parámetros del módulo no es válido, cuando
hay una sesión de parametrización en curso o cuando no hay ningún conjunto de parámetros. En el
conjunto de parámetros hay un identificador con el que el módulo de seguridad puede detectar si se
trata del estado de entrega (=conjunto de parámetros estándar).
2 Descripción del producto Módulo de seguridad CAMC-G-S3
Festo – GDCP-CAMC-G-S3-ES – 1406NH – Español 133
NotaSi la suma de comprobación del conjunto de parámetros es errónea, entonces se trata
de un error interno grave que conduce al estado “Error del sistema”.
VOUT_SFR: “Safety Function Requested” / “Función de seguridad solicitada”La señal “Función de seguridad solicitada” pasa a ser “1” cuando se ha solicitado al menos una función
de seguridad. Permanece activa hasta que se han restablecido todas las solicitudes.
VOUT_SSR: “Safe State Reached” / Estado seguro alcanzado”La señal “Estado seguro alcanzado” pasa a ser “1” cuando en todas las funciones de seguridad la
salida “Estado seguro alcanzado” está activa y al menos se ha solicitado una función de seguridad.
VOUT_ERROR: “System Error” / “Error interno del sistema”
La señal “Error del sistema” pasa a ser “1” cuando hay al menos un error cuya reacción está
parametrizada como superior a “Advertencia”. Están excluidos los errores de la categoría “Condición
de seguridad vulnerada” que disponen de un mensaje de error común propio.
Observación: Este es el caso cuando hay un error validable de un módulo o cuando el sistema completo
se encuentra en el estado “Error del sistema” o “Error de comunicación”.
VOUT_SCV: “Safety Condition Violated” / “Condición de seguridad vulnerada”La señal “Condición de seguridad vulnerada” pasa a ser “1” cuando hay al menos un error de la
categoría “Condición de seguridad vulnerada” en la gestión de errores y cuando la reacción ante
errores de dicho error tiene una prioridad superior a “Advertencia”.
VOUT_WARN: “Advertencia”La señal “Advertencia” pasa a ser “1” cuando hay al menos un error cuya reacción está parametrizada
como “Advertencia”. Están excluidos los errores de la categoría “Condición de seguridad vulnerada”.
VOUT_PS_EN: “Power Stage Enable” / “Preparado para conectar el paso de salida”
La señal “Preparado para conectar el paso de salida” representa directamente el estado del bloqueo
seguro de pulsos (función de seguridad STO). Es “1” cuando el módulo de seguridad ha habilitado la
alimentación del excitador, y es “0” cuando la alimentación del excitador ha sido desconectada
mediante la función de seguridad STO.
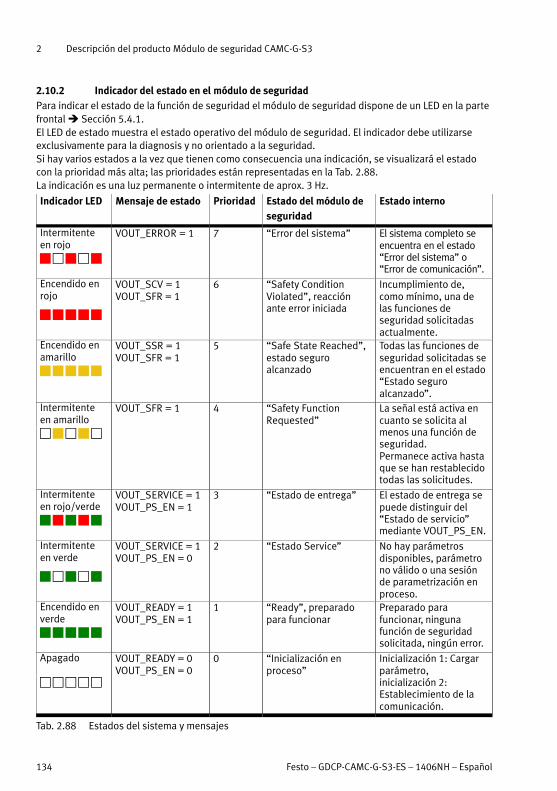
2 Descripción del producto Módulo de seguridad CAMC-G-S3
134 Festo – GDCP-CAMC-G-S3-ES – 1406NH – Español
2.10.2 Indicador del estado en el módulo de seguridadPara indicar el estado de la función de seguridad el módulo de seguridad dispone de un LED en la partefrontal � Sección 5.4.1.El LED de estado muestra el estado operativo del módulo de seguridad. El indicador debe utilizarseexclusivamente para la diagnosis y no orientado a la seguridad.Si hay varios estados a la vez que tienen como consecuencia una indicación, se visualizará el estadocon la prioridad más alta; las prioridades están representadas en la Tab. 2.88.La indicación es una luz permanente o intermitente de aprox. 3 Hz.
Indicador LED Mensaje de estado Prioridad Estado del módulo deseguridad
Estado interno
Intermitenteen rojo
VOUT_ERROR = 1 7 “Error del sistema” El sistema completo seencuentra en el estado“Error del sistema” o“Error de comunicación”.
� � � � �
Encendido enrojo
VOUT_SCV = 1VOUT_SFR = 1
6 “Safety ConditionViolated”, reacciónante error iniciada
Incumplimiento de,como mínimo, una delas funciones deseguridad solicitadasactualmente.
� � � � �
Encendido enamarillo
VOUT_SSR = 1VOUT_SFR = 1
5 “Safe State Reached”,estado seguroalcanzado
Todas las funciones deseguridad solicitadas seencuentran en el estado“Estado seguroalcanzado”.
� � � � �
Intermitenteen amarillo
VOUT_SFR = 1 4 “Safety FunctionRequested”
La señal está activa encuanto se solicita almenos una función deseguridad.Permanece activa hastaque se han restablecidotodas las solicitudes.
� � � � �
Intermitenteen rojo/verde
VOUT_SERVICE = 1VOUT_PS_EN = 1
3 “Estado de entrega” El estado de entrega sepuede distinguir del“Estado de servicio”mediante VOUT_PS_EN.
� � � � �
Intermitenteen verde
VOUT_SERVICE = 1VOUT_PS_EN = 0
2 “Estado Service” No hay parámetrosdisponibles, parámetrono válido o una sesiónde parametrización enproceso.
� � � � �
Encendido enverde
VOUT_READY = 1VOUT_PS_EN = 1
1 “Ready”, preparadopara funcionar
Preparado parafuncionar, ningunafunción de seguridadsolicitada, ningún error.
� � � � �
Apagado VOUT_READY = 0VOUT_PS_EN = 0
0 “Inicialización enproceso”
Inicialización 1: Cargarparámetro,inicialización 2:Establecimiento de lacomunicación.
� � � � �
Tab. 2.88 Estados del sistema y mensajes
2 Descripción del producto Módulo de seguridad CAMC-G-S3
Festo – GDCP-CAMC-G-S3-ES – 1406NH – Español 135
2.10.3 Visualizador digital de 7 segmentos del controlador de motorEl visualizador digital de 7 segmentos del controlador de motor muestra informaciones adicionales
� Sección 5.4.2, p. ej.:
– Indicación de la función de seguridad activa.
– Indicación de mensajes de error del módulo de seguridad con números de error inequívocos. Las
funciones de parada ya solicitadas (STO, SS1, SS2, SOS) tienen una prioridad de visualización
superior que las demás funciones de seguridad � Sección 5.6.
– Visualización de una sesión de parametrización activa.
2.11 Memoria de diagnosis permanente y temporal en el controlador demotor
En la memoria permanente del controlador de motor se guardan los mensajes de diagnosis
permanentemente. Esta memoria se compone de 2 segmentos que se llenan uno tras otro. Cuando
ambos segmentos están llenos, se borra automáticamente el segmento más antiguo. De este modo se
dispone de una memoria casi circular para los mensajes guardados permanentemente.
El controlador de motor gestiona una memoria de diagnosis permanente que está depositada en la
memoria no volátil del equipo y por lo tanto se conserva también en caso de fallo de tensión / Power
Off. La memoria permanente de diagnosis sirve para a memorización no volátil de errores y otros
eventos.
La memoria permanente de diagnosis se compone de dos bloques en los que se escribe de forma
alterna. Cuando un bloque está lleno se borra el otro bloque. La arquitectura de la memoria exige que
en caso de un borrado se pierda la mitad de las entradas guardadas.
La memoria permanente de diagnosis es utilizada tanto por el módulo de seguridad como por el
controlador de motor. Las entradas del controlador de motor cargan el espacio de memoria disponible
en total. No hay ninguna reserva de espacio de memoria para el módulo de seguridad.
Los mensajes de estado y de error se introducen cronológicamente; las entradas más antiguas se
borran cuando un bloque está lleno.
En relación con el módulo de seguridad se protocolan los siguientes eventos en la memoria
permanente de diagnosis:
– Apertura de una sesión de parametrización (también intento de apertura)
– Cierre de la sesión de parametrización
– Modificación / restablecimiento de la contraseña
– Memorización del conjunto de parámetros en el módulo de seguridad
– Errores y advertencias
– Acuse de recibo de errores
– Solicitud de una función de seguridad (activable)
La creación de un protocolo de la solicitud de una función de seguridad está desactivada
de fábrica; en caso necesario se puede activar mediante el parámetro P20.4A.
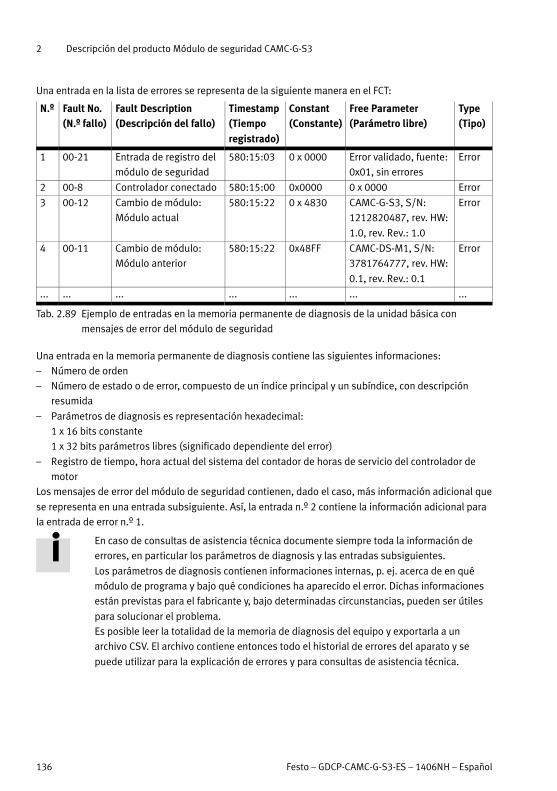
2 Descripción del producto Módulo de seguridad CAMC-G-S3
136 Festo – GDCP-CAMC-G-S3-ES – 1406NH – Español
Una entrada en la lista de errores se representa de la siguiente manera en el FCT:
N.º Fault No.(N.º fallo)
Fault Description(Descripción del fallo)
Timestamp(Tiempo
registrado)
Constant(Constante)
Free Parameter(Parámetro libre)
Type(Tipo)
1 00-21 Entrada de registro del
módulo de seguridad
580:15:03 0 x 0000 Error validado, fuente:
0x01, sin errores
Error
2 00-8 Controlador conectado 580:15:00 0x0000 0 x 0000 Error
3 00-12 Cambio de módulo:
Módulo actual
580:15:22 0 x 4830 CAMC-G-S3, S/N:
1212820487, rev. HW:
1.0, rev. Rev.: 1.0
Error
4 00-11 Cambio de módulo:
Módulo anterior
580:15:22 0x48FF CAMC-DS-M1, S/N:
3781764777, rev. HW:
0.1, rev. Rev.: 0.1
Error
... ... ... ... ... ... ...
Tab. 2.89 Ejemplo de entradas en la memoria permanente de diagnosis de la unidad básica con
mensajes de error del módulo de seguridad
Una entrada en la memoria permanente de diagnosis contiene las siguientes informaciones:
– Número de orden
– Número de estado o de error, compuesto de un índice principal y un subíndice, con descripción
resumida
– Parámetros de diagnosis es representación hexadecimal:
1 x 16 bits constante
1 x 32 bits parámetros libres (significado dependiente del error)
– Registro de tiempo, hora actual del sistema del contador de horas de servicio del controlador de
motor
Los mensajes de error del módulo de seguridad contienen, dado el caso, más información adicional que
se representa en una entrada subsiguiente. Así, la entrada n.º 2 contiene la información adicional para
la entrada de error n.º 1.
En caso de consultas de asistencia técnica documente siempre toda la información de
errores, en particular los parámetros de diagnosis y las entradas subsiguientes.
Los parámetros de diagnosis contienen informaciones internas, p. ej. acerca de en qué
módulo de programa y bajo qué condiciones ha aparecido el error. Dichas informaciones
están previstas para el fabricante y, bajo determinadas circunstancias, pueden ser útiles
para solucionar el problema.
Es posible leer la totalidad de la memoria de diagnosis del equipo y exportarla a un
archivo CSV. El archivo contiene entonces todo el historial de errores del aparato y se
puede utilizar para la explicación de errores y para consultas de asistencia técnica.
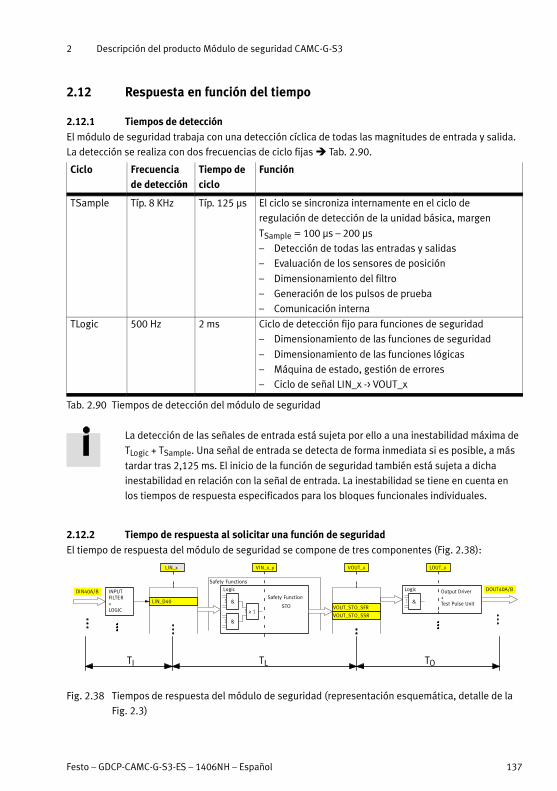
2 Descripción del producto Módulo de seguridad CAMC-G-S3
Festo – GDCP-CAMC-G-S3-ES – 1406NH – Español 137
2.12 Respuesta en función del tiempo
2.12.1 Tiempos de detección
El módulo de seguridad trabaja con una detección cíclica de todas las magnitudes de entrada y salida.
La detección se realiza con dos frecuencias de ciclo fijas � Tab. 2.90.
Ciclo Frecuenciade detección
Tiempo deciclo
Función
TSample Típ. 8 KHz Típ. 125 μs El ciclo se sincroniza internamente en el ciclo de
regulación de detección de la unidad básica, margen
TSample = 100 μs – 200 μs
– Detección de todas las entradas y salidas
– Evaluación de los sensores de posición
– Dimensionamiento del filtro
– Generación de los pulsos de prueba
– Comunicación interna
TLogic 500 Hz 2 ms Ciclo de detección fijo para funciones de seguridad
– Dimensionamiento de las funciones de seguridad
– Dimensionamiento de las funciones lógicas
– Máquina de estado, gestión de errores
– Ciclo de señal LIN_x -> VOUT_x
Tab. 2.90 Tiempos de detección del módulo de seguridad
La detección de las señales de entrada está sujeta por ello a una inestabilidad máxima de
TLogic + TSample. Una señal de entrada se detecta de forma inmediata si es posible, a más
tardar tras 2,125 ms. El inicio de la función de seguridad también está sujeta a dicha
inestabilidad en relación con la señal de entrada. La inestabilidad se tiene en cuenta en
los tiempos de respuesta especificados para los bloques funcionales individuales.
2.12.2 Tiempo de respuesta al solicitar una función de seguridad
El tiempo de respuesta del módulo de seguridad se compone de tres componentes (Fig. 2.38):
DOUT40A/BINPUT FILTER+LOGIC
Safety Functions
Safety Function
STO
Logic
......
...
LIN_D40
VIN_x_yLIN_x
VOUT_STO_SFR
VOUT_x
VOUT_STO_SSR
DIN40A/B Output Driver +Test Pulse Unit
Logic
LOUT_x
...
TI TL TO
Fig. 2.38 Tiempos de respuesta del módulo de seguridad (representación esquemática, detalle de la
Fig. 2.3)
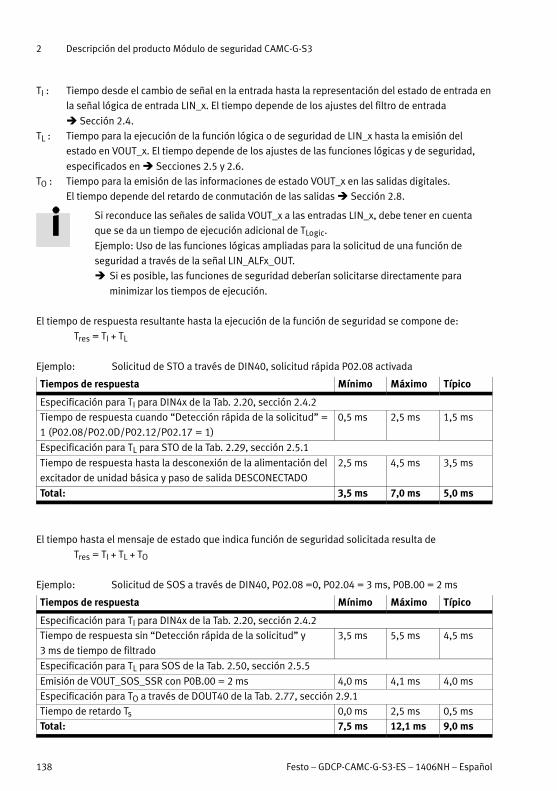
2 Descripción del producto Módulo de seguridad CAMC-G-S3
138 Festo – GDCP-CAMC-G-S3-ES – 1406NH – Español
TI : Tiempo desde el cambio de señal en la entrada hasta la representación del estado de entrada en
la señal lógica de entrada LIN_x. El tiempo depende de los ajustes del filtro de entrada
� Sección 2.4.
TL : Tiempo para la ejecución de la función lógica o de seguridad de LIN_x hasta la emisión del
estado en VOUT_x. El tiempo depende de los ajustes de las funciones lógicas y de seguridad,
especificados en � Secciones 2.5 y 2.6.
TO : Tiempo para la emisión de las informaciones de estado VOUT_x en las salidas digitales.
El tiempo depende del retardo de conmutación de las salidas � Sección 2.8.
Si reconduce las señales de salida VOUT_x a las entradas LIN_x, debe tener en cuenta
que se da un tiempo de ejecución adicional de TLogic.
Ejemplo: Uso de las funciones lógicas ampliadas para la solicitud de una función de
seguridad a través de la señal LIN_ALFx_OUT.
� Si es posible, las funciones de seguridad deberían solicitarse directamente para
minimizar los tiempos de ejecución.
El tiempo de respuesta resultante hasta la ejecución de la función de seguridad se compone de:
Tres = TI + TL
Ejemplo: Solicitud de STO a través de DIN40, solicitud rápida P02.08 activada
Tiempos de respuesta Mínimo Máximo Típico
Especificación para TI para DIN4x de la Tab. 2.20, sección 2.4.2
Tiempo de respuesta cuando “Detección rápida de la solicitud” =
1 (P02.08/P02.0D/P02.12/P02.17 = 1)
0,5 ms 2,5 ms 1,5 ms
Especificación para TL para STO de la Tab. 2.29, sección 2.5.1
Tiempo de respuesta hasta la desconexión de la alimentación del
excitador de unidad básica y paso de salida DESCONECTADO
2,5 ms 4,5 ms 3,5 ms
Total: 3,5 ms 7,0 ms 5,0 ms
El tiempo hasta el mensaje de estado que indica función de seguridad solicitada resulta de
Tres = TI + TL + TO
Ejemplo: Solicitud de SOS a través de DIN40, P02.08 =0, P02.04 = 3 ms, P0B.00 = 2 ms
Tiempos de respuesta Mínimo Máximo Típico
Especificación para TI para DIN4x de la Tab. 2.20, sección 2.4.2
Tiempo de respuesta sin “Detección rápida de la solicitud” y
3 ms de tiempo de filtrado
3,5 ms 5,5 ms 4,5 ms
Especificación para TL para SOS de la Tab. 2.50, sección 2.5.5
Emisión de VOUT_SOS_SSR con P0B.00 = 2 ms 4,0 ms 4,1 ms 4,0 ms
Especificación para TO a través de DOUT40 de la Tab. 2.77, sección 2.9.1
Tiempo de retardo Ts 0,0 ms 2,5 ms 0,5 ms
Total: 7,5 ms 12,1 ms 9,0 ms
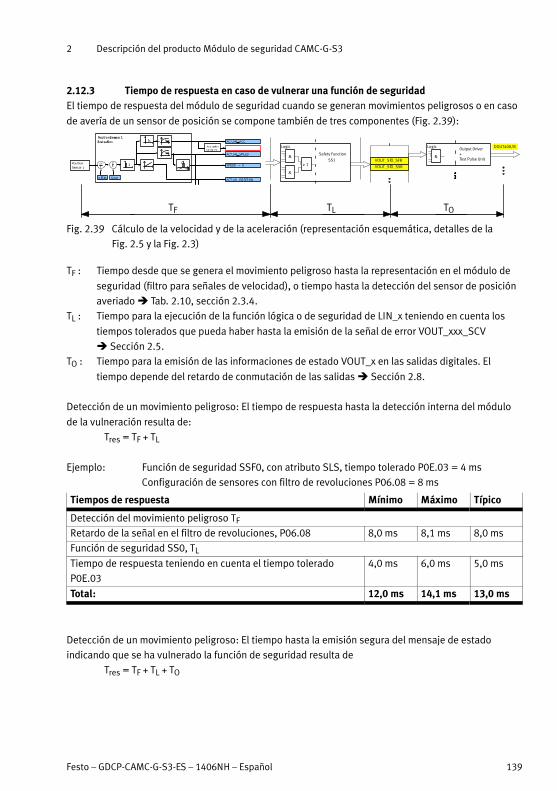
2 Descripción del producto Módulo de seguridad CAMC-G-S3
Festo – GDCP-CAMC-G-S3-ES – 1406NH – Español 139
2.12.3 Tiempo de respuesta en caso de vulnerar una función de seguridadEl tiempo de respuesta del módulo de seguridad cuando se generan movimientos peligrosos o en caso
de avería de un sensor de posición se compone también de tres componentes (Fig. 2.39):
DOUT40A/B
Safety Function
SS1
Logic
......
... VOUT_STO_SFR
VOUT_STO_SSR
Output Driver +Test Pulse Unit
Logic
...
TF TL TO
Fig. 2.39 Cálculo de la velocidad y de la aceleración (representación esquemática, detalles de la
Fig. 2.5 y la Fig. 2.3)
TF : Tiempo desde que se genera el movimiento peligroso hasta la representación en el módulo de
seguridad (filtro para señales de velocidad), o tiempo hasta la detección del sensor de posición
averiado � Tab. 2.10, sección 2.3.4.
TL : Tiempo para la ejecución de la función lógica o de seguridad de LIN_x teniendo en cuenta los
tiempos tolerados que pueda haber hasta la emisión de la señal de error VOUT_xxx_SCV
� Sección 2.5.
TO : Tiempo para la emisión de las informaciones de estado VOUT_x en las salidas digitales. El
tiempo depende del retardo de conmutación de las salidas � Sección 2.8.
Detección de un movimiento peligroso: El tiempo de respuesta hasta la detección interna del módulo
de la vulneración resulta de:
Tres = TF + TL
Ejemplo: Función de seguridad SSF0, con atributo SLS, tiempo tolerado P0E.03 = 4 ms
Configuración de sensores con filtro de revoluciones P06.08 = 8 ms
Tiempos de respuesta Mínimo Máximo Típico
Detección del movimiento peligroso TF
Retardo de la señal en el filtro de revoluciones, P06.08 8,0 ms 8,1 ms 8,0 ms
Función de seguridad SS0, TL
Tiempo de respuesta teniendo en cuenta el tiempo tolerado
P0E.03
4,0 ms 6,0 ms 5,0 ms
Total: 12,0 ms 14,1 ms 13,0 ms
Detección de un movimiento peligroso: El tiempo hasta la emisión segura del mensaje de estado
indicando que se ha vulnerado la función de seguridad resulta de
Tres = TF + TL + TO
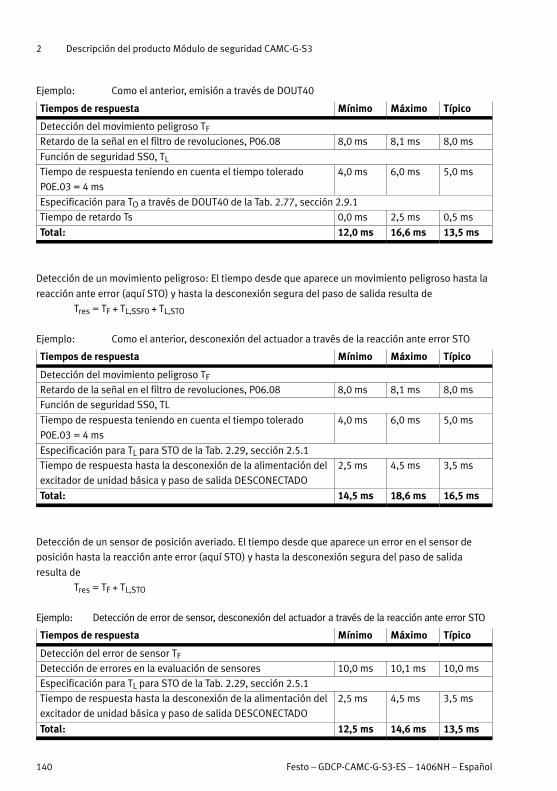
2 Descripción del producto Módulo de seguridad CAMC-G-S3
140 Festo – GDCP-CAMC-G-S3-ES – 1406NH – Español
Ejemplo: Como el anterior, emisión a través de DOUT40
Tiempos de respuesta Mínimo Máximo Típico
Detección del movimiento peligroso TF
Retardo de la señal en el filtro de revoluciones, P06.08 8,0 ms 8,1 ms 8,0 ms
Función de seguridad SS0, TL
Tiempo de respuesta teniendo en cuenta el tiempo tolerado
P0E.03 = 4 ms
4,0 ms 6,0 ms 5,0 ms
Especificación para TO a través de DOUT40 de la Tab. 2.77, sección 2.9.1
Tiempo de retardo Ts 0,0 ms 2,5 ms 0,5 ms
Total: 12,0 ms 16,6 ms 13,5 ms
Detección de un movimiento peligroso: El tiempo desde que aparece un movimiento peligroso hasta la
reacción ante error (aquí STO) y hasta la desconexión segura del paso de salida resulta de
Tres = TF + TL,SSF0 + TL,STO
Ejemplo: Como el anterior, desconexión del actuador a través de la reacción ante error STO
Tiempos de respuesta Mínimo Máximo Típico
Detección del movimiento peligroso TF
Retardo de la señal en el filtro de revoluciones, P06.08 8,0 ms 8,1 ms 8,0 ms
Función de seguridad SS0, TL
Tiempo de respuesta teniendo en cuenta el tiempo tolerado
P0E.03 = 4 ms
4,0 ms 6,0 ms 5,0 ms
Especificación para TL para STO de la Tab. 2.29, sección 2.5.1
Tiempo de respuesta hasta la desconexión de la alimentación del
excitador de unidad básica y paso de salida DESCONECTADO
2,5 ms 4,5 ms 3,5 ms
Total: 14,5 ms 18,6 ms 16,5 ms
Detección de un sensor de posición averiado. El tiempo desde que aparece un error en el sensor de
posición hasta la reacción ante error (aquí STO) y hasta la desconexión segura del paso de salida
resulta de
Tres = TF + TL,STO
Ejemplo: Detección de error de sensor, desconexión del actuador a través de la reacción ante error STO
Tiempos de respuesta Mínimo Máximo Típico
Detección del error de sensor TF
Detección de errores en la evaluación de sensores 10,0 ms 10,1 ms 10,0 ms
Especificación para TL para STO de la Tab. 2.29, sección 2.5.1
Tiempo de respuesta hasta la desconexión de la alimentación del
excitador de unidad básica y paso de salida DESCONECTADO
2,5 ms 4,5 ms 3,5 ms
Total: 12,5 ms 14,6 ms 13,5 ms
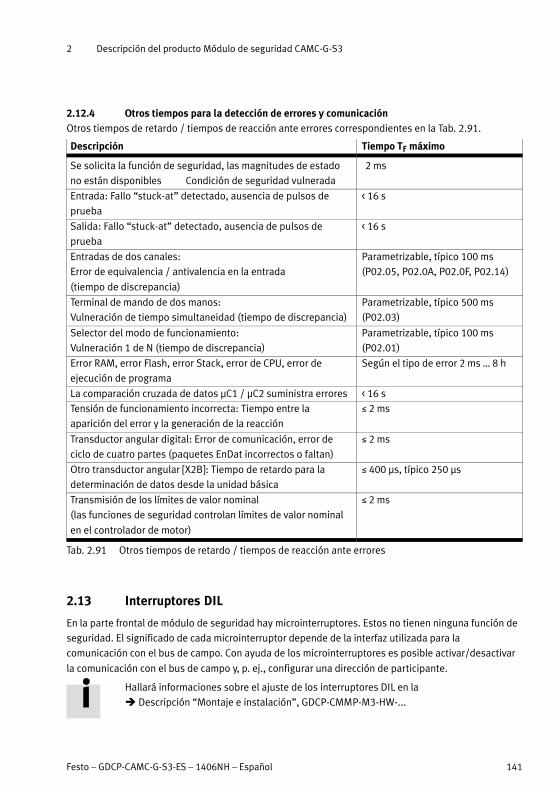
2 Descripción del producto Módulo de seguridad CAMC-G-S3
Festo – GDCP-CAMC-G-S3-ES – 1406NH – Español 141
2.12.4 Otros tiempos para la detección de errores y comunicaciónOtros tiempos de retardo / tiempos de reacción ante errores correspondientes en la Tab. 2.91.
Descripción Tiempo TF máximo
Se solicita la función de seguridad, las magnitudes de estado
no están disponibles Condición de seguridad vulnerada
2 ms
Entrada: Fallo “stuck-at” detectado, ausencia de pulsos de
prueba
< 16 s
Salida: Fallo “stuck-at” detectado, ausencia de pulsos de
prueba
< 16 s
Entradas de dos canales:
Error de equivalencia / antivalencia en la entrada
(tiempo de discrepancia)
Parametrizable, típico 100 ms
(P02.05, P02.0A, P02.0F, P02.14)
Terminal de mando de dos manos:
Vulneración de tiempo simultaneidad (tiempo de discrepancia)
Parametrizable, típico 500 ms
(P02.03)
Selector del modo de funcionamiento:
Vulneración 1 de N (tiempo de discrepancia)
Parametrizable, típico 100 ms
(P02.01)
Error RAM, error Flash, error Stack, error de CPU, error de
ejecución de programa
Según el tipo de error 2 ms … 8 h
La comparación cruzada de datos μC1 / μC2 suministra errores < 16 s
Tensión de funcionamiento incorrecta: Tiempo entre la
aparición del error y la generación de la reacción
≤ 2 ms
Transductor angular digital: Error de comunicación, error de
ciclo de cuatro partes (paquetes EnDat incorrectos o faltan)
≤ 2 ms
Otro transductor angular [X2B]: Tiempo de retardo para la
determinación de datos desde la unidad básica
≤ 400 μs, típico 250 μs
Transmisión de los límites de valor nominal
(las funciones de seguridad controlan límites de valor nominal
en el controlador de motor)
≤ 2 ms
Tab. 2.91 Otros tiempos de retardo / tiempos de reacción ante errores
2.13 Interruptores DIL
En la parte frontal de módulo de seguridad hay microinterruptores. Estos no tienen ninguna función de
seguridad. El significado de cada microinterruptor depende de la interfaz utilizada para la
comunicación con el bus de campo. Con ayuda de los microinterruptores es posible activar/desactivar
la comunicación con el bus de campo y, p. ej., configurar una dirección de participante.
Hallará informaciones sobre el ajuste de los interruptores DIL en la
� Descripción “Montaje e instalación”, GDCP-CMMP-M3-HW-...
3 Montaje e instalación
142 Festo – GDCP-CAMC-G-S3-ES – 1406NH – Español
3 Montaje e instalación
3.1 Montaje y desmontaje
El módulo de seguridad CAMC-G-S3 es adecuado exclusivamente para la integración en el controlador
de motor CMMP-AS-…-M3. No se puede hacer funcionar fuera del controlador de motor.
AdvertenciaPeligro de descarga eléctrica en el módulo de seguridad no montado.
El contacto con piezas bajo tensión causa lesiones graves y puede provocar la muerte.
Antes de tocar piezas bajo tensión durante trabajos de mantenimiento, reparación y
limpieza, así como durante interrupciones prolongadas de la operación:
1. Dejar sin tensión el equipo eléctrico mediante el interruptor principal y asegurarlo
contra reconexiones.
2. Tras la desconexión se debe esperar 5 minutos de tiempo de descarga y comprobar
que no hay tensión antes de acceder al controlador.
NotaDaños en el módulo de seguridad o en el controlador de motor por una manipulación
inadecuada.� Desconecte las tensiones de alimentación antes de los trabajos de montaje e
instalación. Vuelva a conectar las tensiones de alimentación solo cuando los
trabajos de montaje e instalación hayan finalizado por completo.
� ¡Nunca desenchufe ni enchufe el módulo de seguridad del controlador de motor
mientras esté bajo tensión!
� Observe las especificaciones sobre manipulación de componentes sensibles a las
descargas electrostáticas. No toque los componentes ni las pistas conductoras del
circuito impreso ni los pines de la regleta de terminales del controlador de motor.
Agarre el módulo de seguridad únicamente por la placa frontal o el borde del
circuito impreso.
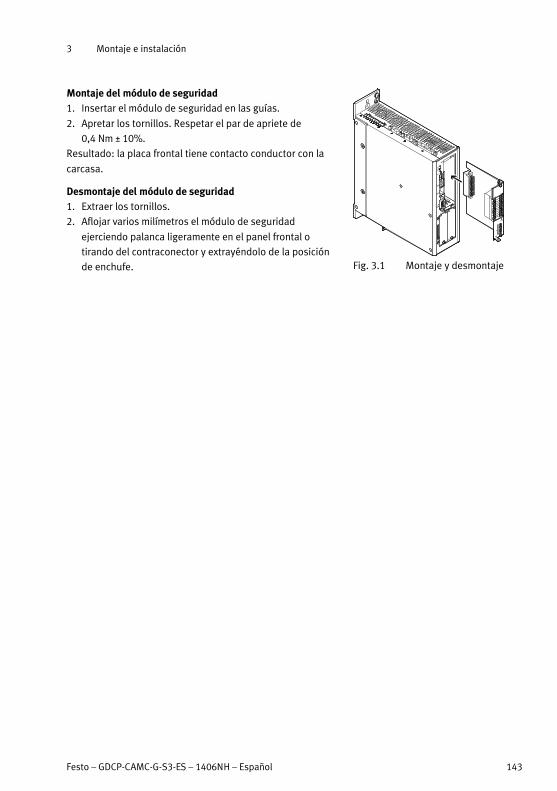
3 Montaje e instalación
Festo – GDCP-CAMC-G-S3-ES – 1406NH – Español 143
Montaje del módulo de seguridad1. Insertar el módulo de seguridad en las guías.
2. Apretar los tornillos. Respetar el par de apriete de
0,4 Nm ± 10%.
Resultado: la placa frontal tiene contacto conductor con la
carcasa.
Desmontaje del módulo de seguridad1. Extraer los tornillos.
2. Aflojar varios milímetros el módulo de seguridad
ejerciendo palanca ligeramente en el panel frontal o
tirando del contraconector y extrayéndolo de la posición
de enchufe. Fig. 3.1 Montaje y desmontaje
3 Montaje e instalación
144 Festo – GDCP-CAMC-G-S3-ES – 1406NH – Español
3.2 Instalación eléctrica
3.2.1 Instrucciones de seguridad
Advertencia¡Peligro debido a merma de la función de seguridad!
En instalaciones de maquinaria sin actuación de fuerzas externas en principio se
presupone que la pérdida de energía conduce al estado seguro (principio de corriente
en reposo). Esto se debe mostrar/confirmar mediante el análisis de riesgos y peligros
de la aplicación.
La ausencia de función de seguridad puede causar daños graves irreversibles, p. ej.
debido a movimientos inesperados de la técnica de los actuadores conectados.
� Asegúrese de que, conforme a su aplicación haya una fuente de alimentación segura
o disponga las medidas correspondientes.
Para la instalación se deben cumplir los requerimientos de la norma EN 60204-1. Si esto no fuera
posible puede realizarse, p. ej., una exclusión de errores por medido de un dispositivo de desconexión
de seguridad con detección de circuitos cruzados.
AdvertenciaPeligro de descargas eléctricas en fuentes de tensión sin medidas de seguridad.
� Para la alimentación eléctrica de la lógica, utilice exclusivamente circuitos PELV
conforme a EN 60204-1 (PELV = Protective Extra-Low Voltage).
� Preste atención a las exigencias generales para circuitos PELV de conformidad con
EN 60204-1.
� Utilice exclusivamente fuentes de alimentación que garanticen una desconexión
electrónica segura de la tensión de funcionamiento de otros circuitos activos
conforme a la EN 60204-1.
Utilizando fuentes de alimentación PELV se garantiza la protección contra posibles descargas eléctricas
(protección contra contacto directo e indirecto) según la norma EN 60204-1. La unidad de red de 24 V
utilizada en el sistema debe dominar la interrupción de tensión definida en la norma EN 60204-1.
La conexión de los cables se realiza con conectores. Esto permite, p. ej., que los cables permanezcan
en los conectores durante la sustitución del módulo de seguridad.
Asegúrese de que no se puedan utilizar puentes o similares paralelamente al cableado de
seguridad, p. ej. mediante el uso de la sección de los hilos máxima de 1,5 mm² o de
fundas terminales de cable con collar aislante adecuadas.
Para el enlazado de cables entre aparatos vecinos utilice fundas terminales de cable
gemelas.
Protección ESD
En los conectores enchufables sin asignar hay riesgo de que se produzcan daños en el aparato o en
otras partes de la instalación, como resultado de la ESD (descarga electrostática). Antes de la
instalación, ponga a tierra todas las partes del sistema y use equipamiento ESD apropiado (p. ej.
bandas de toma a tierra, etc.).
3 Montaje e instalación
Festo – GDCP-CAMC-G-S3-ES – 1406NH – Español 145
3.2.2 Tierra funcionalSi utiliza un cable de conexión apantallado para [X40]:
La parte no apantallada del cable debe ser lo más corta posible ( 50 mm), para la conexión pantallada
utilice una cinta de puesta a tierra corta con conector plano de 6,3 mm.
Enchufe el conector plano de la conexión apantallada en la conexión prevista para ello para la tierra
funcional (� Fig. 2.1 en la sección 2.1.4, conexión 7 ).
3.2.3 Conexión [X40]El módulo de seguridad CAMC-G-S3 dispone de una interfaz combinada para control y acuse de recibo
a través del conector enchufable [X40].
– Ejecución en el aparato: PHOENIX MINICOMBICON MC 1,5/8-GF-3,81 BK
– Conector (incluido en el suministro): PHOENIX MINICOMBICON MC 1,5/8-STF-3,81 BK
El juego de contraconectores, compuesto de contraconectores para X40A y X40B también
se puede pedir por separado: Surtido de conectores tipo clavija NEKM-C-9.
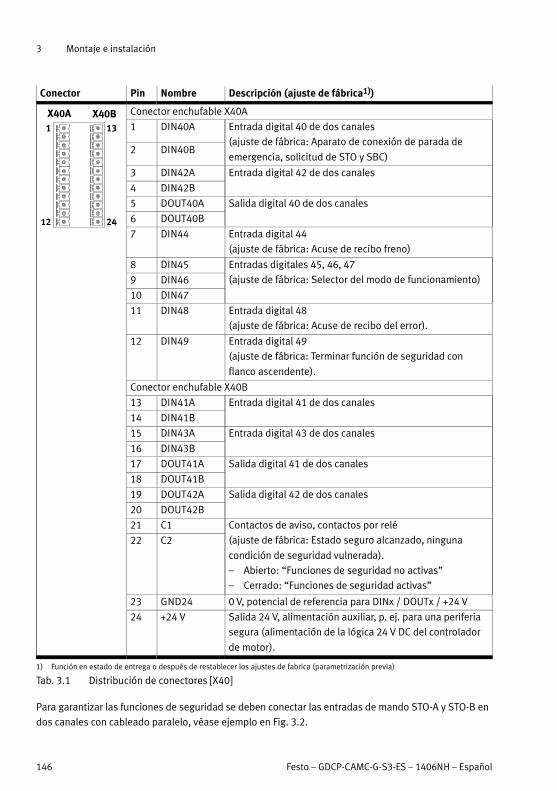
3 Montaje e instalación
146 Festo – GDCP-CAMC-G-S3-ES – 1406NH – Español
Conector Pin Nombre Descripción (ajuste de fábrica1))
X40A X40B Conector enchufable X40A
1 DIN40A Entrada digital 40 de dos canales
(ajuste de fábrica: Aparato de conexión de parada de
emergencia, solicitud de STO y SBC)2 DIN40B
3 DIN42A Entrada digital 42 de dos canales
4 DIN42B
5 DOUT40A Salida digital 40 de dos canales
6 DOUT40B
7 DIN44 Entrada digital 44
(ajuste de fábrica: Acuse de recibo freno)
8 DIN45 Entradas digitales 45, 46, 47
(ajuste de fábrica: Selector del modo de funcionamiento)9 DIN46
10 DIN47
11 DIN48 Entrada digital 48
(ajuste de fábrica: Acuse de recibo del error).
12 DIN49 Entrada digital 49
(ajuste de fábrica: Terminar función de seguridad con
flanco ascendente).
Conector enchufable X40B
13 DIN41A Entrada digital 41 de dos canales
14 DIN41B
15 DIN43A Entrada digital 43 de dos canales
16 DIN43B
17 DOUT41A Salida digital 41 de dos canales
18 DOUT41B
19 DOUT42A Salida digital 42 de dos canales
20 DOUT42B
21 C1 Contactos de aviso, contactos por relé
(ajuste de fábrica: Estado seguro alcanzado, ninguna
condición de seguridad vulnerada).
– Abierto: “Funciones de seguridad no activas”
– Cerrado: “Funciones de seguridad activas”
22 C2
23 GND24 0 V, potencial de referencia para DINx / DOUTx / +24 V
24 +24 V Salida 24 V, alimentación auxiliar, p. ej. para una periferia
segura (alimentación de la lógica 24 V DC del controlador
de motor).
1) Función en estado de entrega o después de restablecer los ajustes de fabrica (parametrización previa)
Tab. 3.1 Distribución de conectores [X40]
Para garantizar las funciones de seguridad se deben conectar las entradas de mando STO-A y STO-B en
dos canales con cableado paralelo, véase ejemplo en Fig. 3.2.
3 Montaje e instalación
Festo – GDCP-CAMC-G-S3-ES – 1406NH – Español 147
3.2.4 Circuito de protección mínimo para la primera puesta a punto [X40]
Nota¡Merma de la función de seguridad!
La ausencia de función de seguridad puede causar daños graves irreversibles, p. ej.
debido a movimientos inesperados de la técnica de los actuadores conectados.
� Antes de la primera puesta a punto, determine qué funciones de seguridad son
necesarias durante la fase de puesta punto para garantizar la seguridad del sistema
también en esta fase antes de la entrega.
¡En general, se necesita, como mínimo, una función de parada de emergencia
segura!
La puesta a punto según la Directiva de Máquinas es el primer uso conforme a lo previsto
de la máquina por el usuario final. En este caso, se trata de la puesta a punto por el
fabricante de la máquina durante el montaje de la misma.
Si en la fase de puesta a punto (todavía) no se requiere un circuito de protección orientado a la
seguridad, se puede utilizar el módulo de microinterruptores CAMC-DS-M1. El CAMC-G-S3 se puede
integrar entonces en el controlador de motor solo después de la puesta a punto funcional de los ejes.
Si en la fase de puesta a punto solo se necesitan las funciones de seguridad STO y SBC (parada de
emergencia), la primera puesta a punto del controlador de motor CMMP-AS-...-M3 con el módulo de
seguridad CAMC-G-S3 debería realizarse con un circuito de protección mínimo conforme a Fig. 3.2
(� Sección 3.3.1) con un interruptor de parada de emergencia ( 2 ). Utilice para ello un módulo de
seguridad que se encuentre en el “estado de entrega” (intermitencia rojo/verde � � � � � ),
� Sección 2.10.2, Tab. 2.88). En el estado de entrega las funciones de seguridad STO y SBC ya están
preparadas.
NotaLas funciones de seguridad nunca se deben puentear.
Ejecute los circuitos de protección mínimos para la primera puesta a punto de modo que se tengan que
retirar obligatoriamente cuando se establezca un circuito de seguridad definitivo.
Hallará más ejemplos de conexiones eléctricas con descripciones detalladas en las
secciones siguientes.
3 Montaje e instalación
148 Festo – GDCP-CAMC-G-S3-ES – 1406NH – Español
3.3 Ejemplos de circuitos
En los siguientes ejemplos de circuitos se representa respectivamente un controlador de
motor CMMP-AS-C...-3A-M3 de una fase. Para controladores de motor trifásicos es
necesario adaptar el circuito de protección de [X9] de forma correspondiente.
Se representa en cada caso solo una unidad de entrada / aparato de conexión. ¡Sin
embargo se pueden utilizar las cuatro entradas de dos canales para la solicitud de
funciones de seguridad!
NotaLos siguientes ejemplos de circuitos utilizan, en parte, sensores pasivos, como p. ej.
interruptores de parada de emergencia, que se supervisan mediante señales de ciclo
externas. Las salidas digitales del módulo de seguridad deberían utilizarse como fuente
para dichas señales de ciclo. Con ello es posible la detección de los errores siguientes:
– Los cortocircuitos entre las entradas A y B, en el circuito de salida (DOUT4x) y en el
circuito de entrada (DIN4x).
– Cortocircuitos de un circuito contra 0 V o +24 V.
Los cortocircuitos entre entrada y salida del sensor pasivo no se detectan o se detectan
solo en caso de accionamiento (a través de la supervisión de discrepancia). Por este
motivo al realizar el cableado del sistema deben tomarse medidas para evitar este error
(exclusión de errores).
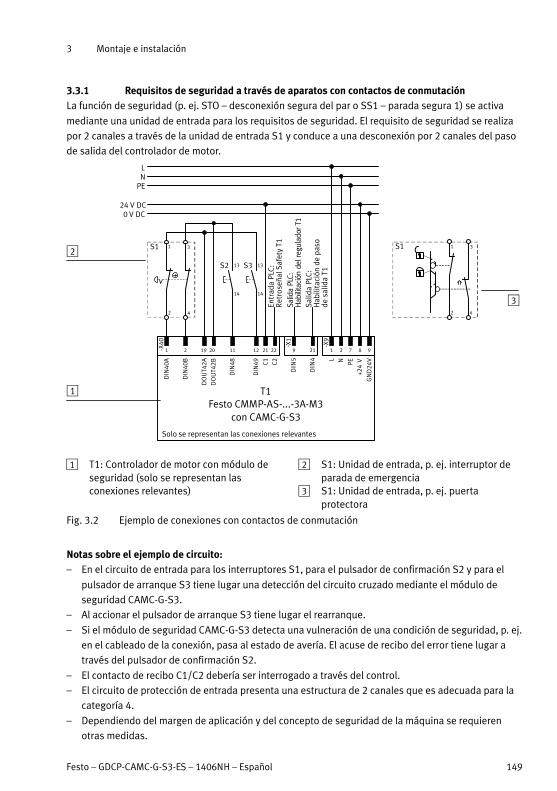
3 Montaje e instalación
Festo – GDCP-CAMC-G-S3-ES – 1406NH – Español 149
3.3.1 Requisitos de seguridad a través de aparatos con contactos de conmutaciónLa función de seguridad (p. ej. STO – desconexión segura del par o SS1 – parada segura 1) se activa
mediante una unidad de entrada para los requisitos de seguridad. El requisito de seguridad se realiza
por 2 canales a través de la unidad de entrada S1 y conduce a una desconexión por 2 canales del paso
de salida del controlador de motor.
N
T1Festo CMMP-AS-...-3A-M3
con CAMC-G-S3
1 2 7 8 9
L
PE
+24
V
GN
D24
VN
-X9
219
DIN
4
DIN
5-X
1
-X40
21 22
C1 C2
S1S1 1
2
1
42
1 2
DIN
40A
DIN
40B
19 20
DO
UT4
2A
DO
UT4
2B
13
14
12
DIN
49
S3
11
DIN
48
S2
L
PE
24 V DC0 V DC
13
14
33
4
Solo se representan las conexiones relevantes
Entr
ada
PLC:
R
etro
seña
l Saf
ety
T1
Salid
a PL
C:
Hab
ilita
ción
del
regu
lado
r T1
Sal
ida
PLC:
H
abili
taci
ón d
e pa
so
de s
alid
a T1
1
2
3
1 T1: Controlador de motor con módulo deseguridad (solo se representan lasconexiones relevantes)
2 S1: Unidad de entrada, p. ej. interruptor deparada de emergencia
3 S1: Unidad de entrada, p. ej. puertaprotectora
Fig. 3.2 Ejemplo de conexiones con contactos de conmutación
Notas sobre el ejemplo de circuito:– En el circuito de entrada para los interruptores S1, para el pulsador de confirmación S2 y para el
pulsador de arranque S3 tiene lugar una detección del circuito cruzado mediante el módulo de
seguridad CAMC-G-S3.
– Al accionar el pulsador de arranque S3 tiene lugar el rearranque.
– Si el módulo de seguridad CAMC-G-S3 detecta una vulneración de una condición de seguridad, p. ej.
en el cableado de la conexión, pasa al estado de avería. El acuse de recibo del error tiene lugar a
través del pulsador de confirmación S2.
– El contacto de recibo C1/C2 debería ser interrogado a través del control.
– El circuito de protección de entrada presenta una estructura de 2 canales que es adecuada para la
categoría 4.
– Dependiendo del margen de aplicación y del concepto de seguridad de la máquina se requieren
otras medidas.
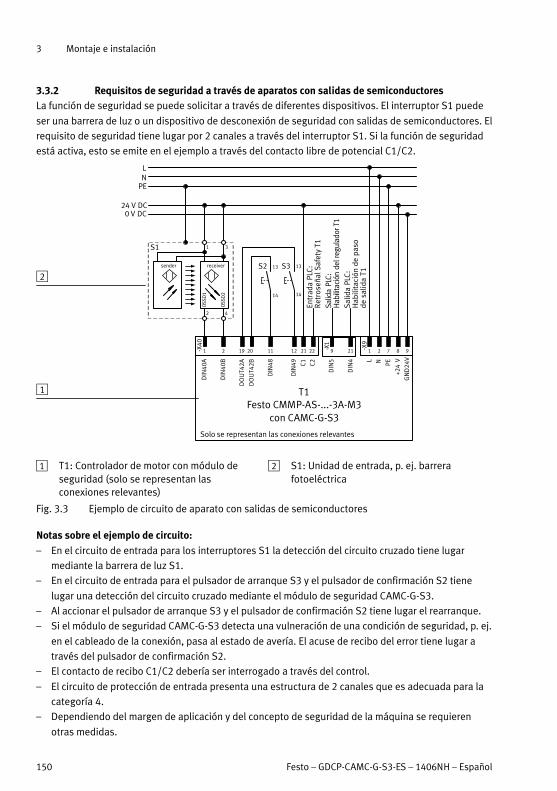
3 Montaje e instalación
150 Festo – GDCP-CAMC-G-S3-ES – 1406NH – Español
3.3.2 Requisitos de seguridad a través de aparatos con salidas de semiconductoresLa función de seguridad se puede solicitar a través de diferentes dispositivos. El interruptor S1 puede
ser una barrera de luz o un dispositivo de desconexión de seguridad con salidas de semiconductores. El
requisito de seguridad tiene lugar por 2 canales a través del interruptor S1. Si la función de seguridad
está activa, esto se emite en el ejemplo a través del contacto libre de potencial C1/C2.
1 2 7 8 9
L
PE
+24
V
GN
D24
VN
-X9
219D
IN4
DIN
5-X
1
-X40
21 22
C1 C2
1 2
DIN
40A
DIN
40B
19 20
DO
UT4
2A
DO
UT4
2B
sender receiver
OSS
D1
OSS
D2
S1 1
42
13
14
12
S3
DIN
49
11
S2D
IN48
N
T1Festo CMMP-AS-...-3A-M3
con CAMC-G-S3
L
PE
24 V DC0 V DC
Solo se representan las conexiones relevantes
Entr
ada
PLC:
R
etro
seña
l Saf
ety
T1Sa
lida
PLC:
H
abili
taci
ón d
el re
gula
dor T
1S
alid
a PL
C:
Hab
ilita
ción
de
paso
de
sal
ida
T1
13
14
3
1
2
1 T1: Controlador de motor con módulo deseguridad (solo se representan lasconexiones relevantes)
2 S1: Unidad de entrada, p. ej. barrerafotoeléctrica
Fig. 3.3 Ejemplo de circuito de aparato con salidas de semiconductores
Notas sobre el ejemplo de circuito:
– En el circuito de entrada para los interruptores S1 la detección del circuito cruzado tiene lugar
mediante la barrera de luz S1.
– En el circuito de entrada para el pulsador de arranque S3 y el pulsador de confirmación S2 tiene
lugar una detección del circuito cruzado mediante el módulo de seguridad CAMC-G-S3.
– Al accionar el pulsador de arranque S3 y el pulsador de confirmación S2 tiene lugar el rearranque.
– Si el módulo de seguridad CAMC-G-S3 detecta una vulneración de una condición de seguridad, p. ej.
en el cableado de la conexión, pasa al estado de avería. El acuse de recibo del error tiene lugar a
través del pulsador de confirmación S2.
– El contacto de recibo C1/C2 debería ser interrogado a través del control.
– El circuito de protección de entrada presenta una estructura de 2 canales que es adecuada para la
categoría 4.
– Dependiendo del margen de aplicación y del concepto de seguridad de la máquina se requieren
otras medidas.
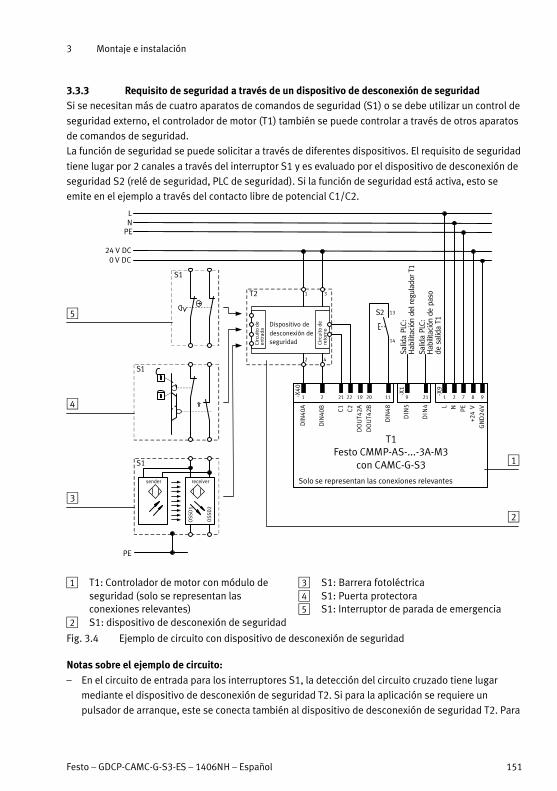
3 Montaje e instalación
Festo – GDCP-CAMC-G-S3-ES – 1406NH – Español 151
3.3.3 Requisito de seguridad a través de un dispositivo de desconexión de seguridadSi se necesitan más de cuatro aparatos de comandos de seguridad (S1) o se debe utilizar un control de
seguridad externo, el controlador de motor (T1) también se puede controlar a través de otros aparatos
de comandos de seguridad.
La función de seguridad se puede solicitar a través de diferentes dispositivos. El requisito de seguridad
tiene lugar por 2 canales a través del interruptor S1 y es evaluado por el dispositivo de desconexión de
seguridad S2 (relé de seguridad, PLC de seguridad). Si la función de seguridad está activa, esto se
emite en el ejemplo a través del contacto libre de potencial C1/C2.
1 2 7 8 9
L
PE
+24
V
GN
D24
VN
-X9
219
DIN
4
DIN
5-X
1
-X40
21 22
C1 C2
1 2
DIN
40A
DIN
40B
19
DO
UT4
2A
T2 1
42
S1
sender receiver
OS
SD
1
OS
SD
2
S1
S1
20
DO
UT4
2B
13
14
11
S2
DIN
48
3
N
T1Festo CMMP-AS-...-3A-M3
con CAMC-G-S3
L
PE
24 V DC0 V DC
Solo se representan las conexiones relevantes
Salid
a PL
C:
Hab
ilita
ción
del
regu
lado
r T1
Salid
a PL
C:
Hab
ilita
ción
de
paso
de
sal
ida
T1Dispositivo dedesconexión deseguridadCi
rcui
to d
e en
trad
a
Circ
uito
de
reto
rno
1
2
3
4
5
PE
1 T1: Controlador de motor con módulo deseguridad (solo se representan lasconexiones relevantes)
2 S1: dispositivo de desconexión de seguridad
3 S1: Barrera fotoléctrica4 S1: Puerta protectora5 S1: Interruptor de parada de emergencia
Fig. 3.4 Ejemplo de circuito con dispositivo de desconexión de seguridad
Notas sobre el ejemplo de circuito:
– En el circuito de entrada para los interruptores S1, la detección del circuito cruzado tiene lugar
mediante el dispositivo de desconexión de seguridad T2. Si para la aplicación se requiere un
pulsador de arranque, este se conecta también al dispositivo de desconexión de seguridad T2. Para
3 Montaje e instalación
152 Festo – GDCP-CAMC-G-S3-ES – 1406NH – Español
el pulsador de confirmación S2 tiene lugar una detección del circuito cruzado mediante el módulo
de seguridad CAMC-G-S3.
– Cuando se utiliza un dispositivo de desconexión de seguridad, las funciones de seguridad en el
CAMC-G-S3 se parametrizan con “rearranque automático tras retirar la solicitud”.
– Si el módulo de seguridad CAMC-G-S3 detecta una vulneración de una condición de seguridad, p. ej.
en el cableado de la conexión, pasa al estado de avería. El acuse de recibo del error tiene lugar a
través del pulsador de confirmación S2.
– El contacto de recibo C1/C2 se integra en el circuito de retorno del dispositivo de desconexión de
seguridad.
– El circuito de protección de entrada presenta una estructura de 2 canales que es adecuada para la
categoría 4.
– Dependiendo del margen de aplicación y del concepto de seguridad de la máquina se requieren
otras medidas.
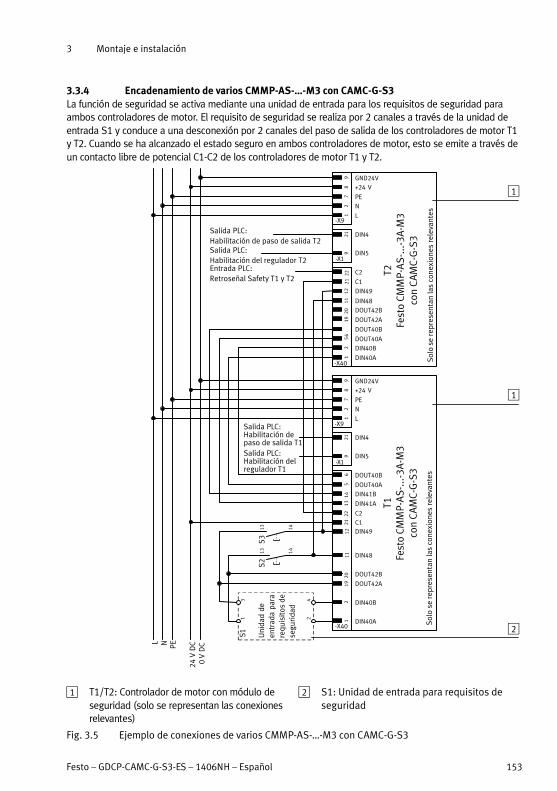
3 Montaje e instalación
Festo – GDCP-CAMC-G-S3-ES – 1406NH – Español 153
3.3.4 Encadenamiento de varios CMMP-AS-…-M3 con CAMC-G-S3La función de seguridad se activa mediante una unidad de entrada para los requisitos de seguridad paraambos controladores de motor. El requisito de seguridad se realiza por 2 canales a través de la unidad deentrada S1 y conduce a una desconexión por 2 canales del paso de salida de los controladores de motor T1y T2. Cuando se ha alcanzado el estado seguro en ambos controladores de motor, esto se emite a través deun contacto libre de potencial C1-C2 de los controladores de motor T1 y T2.
12
78
9
L
PE
+24 V
GND24V
N
-X9
219
DIN4
DIN5-X1
-X40
21 2
2
C1
C2
S11 2 1
2
DIN40A
DIN40B
19 2
0
DOUT42A
DOUT42B
13
12
78
9
L
PE
+24 V
GND24V
N
-X9
219
DIN4
DIN5-X1
-X40
C1
C2
12
DIN40A
DIN40B19
20
DOUT42A
DOUT42B
12 DIN49
5 DOUT40A
DOUT40B
14
12
S3
DIN49
13 14
11
S2
DIN48
11 DIN48
21 2
25
6DOUT40A
DOUT40B
13 1
4
DIN41A
DIN41B
3 4
N
T2Fe
sto
CMM
P-A
S-.
..-3A
-M3
con
CA
MC-
G-S
3
L PE
24 V
DC
0 V
DC
Sol
o se
rep
rese
ntan
las
cone
xion
es r
elev
ante
s
Salida PLC: Habilitación del regulador T2
Salida PLC: Habilitación de paso de salida T2
Uni
dad
deen
trad
a pa
rare
quis
itos
de
segu
rida
d
Entrada PLC: Retroseñal Safety T1 y T2
Salida PLC: Habilitación delregulador T1
Salida PLC: Habilitación depaso de salida T1
T1Fe
sto
CMM
P-A
S-.
..-3A
-M3
con
CA
MC-
G-S
3
Sol
o se
rep
rese
ntan
las
cone
xion
es r
elev
ante
s6
1
2
1
1 T1/T2: Controlador de motor con módulo deseguridad (solo se representan las conexionesrelevantes)
2 S1: Unidad de entrada para requisitos deseguridad
Fig. 3.5 Ejemplo de conexiones de varios CMMP-AS-…-M3 con CAMC-G-S3
3 Montaje e instalación
154 Festo – GDCP-CAMC-G-S3-ES – 1406NH – Español
Notas sobre el ejemplo de circuito:– En el circuito de entrada de las unidades de entrada para el requisito de seguridad S1, para el
pulsador de confirmación S2 y para el pulsador de arranque S3 tiene lugar una detección del
circuito cruzado mediante el CAMC-G-S3 en T1.
– Al accionar el pulsador de arranque S3 tiene lugar el rearranque.
– El controlador de motor T1 tiene que transferir los requisitos de seguridad a través de DOUT40A/B
al controlador de motor T2, que también reacciona a los requisitos de seguridad.
– El controlador de motor T2 tiene que volver a comunicar al controlador de motor T1 los requisitos
de seguridad.
– Los contactos de recibo C1, C2 de T1 y T2 están conectados en serie; la señal se debe interrogar a
través del control. Si ha tenido lugar un requisito de seguridad, el control debería reaccionar
adecuadamente (p. ej., en caso de SLS deberían reducirse los valores nominales, en SS1 debería
retirarse la habilitación del regulador).
– Si el módulo de seguridad CAMC-G-S3 detecta una vulneración de una condición de seguridad, p. ej.
en el cableado de la conexión, pasa al estado de avería. El acuse de recibo del error tiene lugar a
través del pulsador de confirmación S2.
– El circuito de protección de entrada presenta una estructura de 2 canales que es adecuada para la
categoría 4.
– Dependiendo del margen de aplicación y del concepto de seguridad de la máquina se requieren
otras medidas.
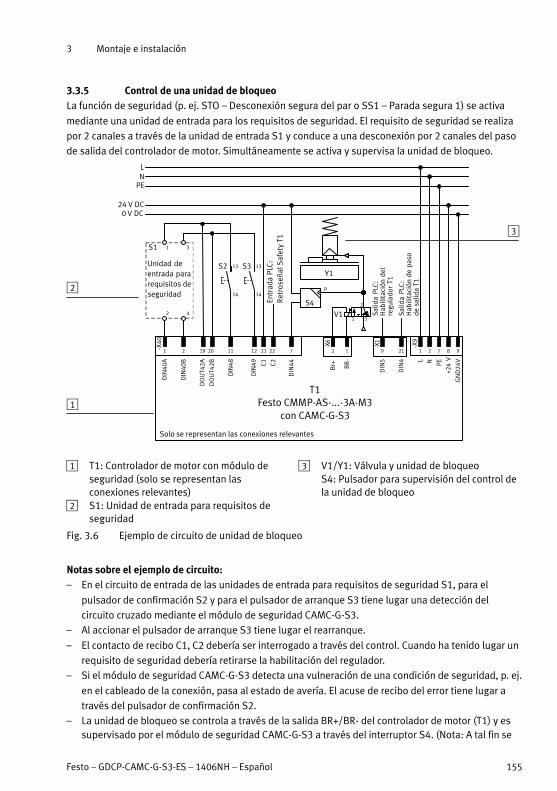
3 Montaje e instalación
Festo – GDCP-CAMC-G-S3-ES – 1406NH – Español 155
3.3.5 Control de una unidad de bloqueoLa función de seguridad (p. ej. STO – Desconexión segura del par o SS1 – Parada segura 1) se activa
mediante una unidad de entrada para los requisitos de seguridad. El requisito de seguridad se realiza
por 2 canales a través de la unidad de entrada S1 y conduce a una desconexión por 2 canales del paso
de salida del controlador de motor. Simultáneamente se activa y supervisa la unidad de bloqueo.
1 2 7 8 9
L
PE
+24
V
GN
D24
VN
-X9
219
DIN
4
DIN
5-X
1
-X40
21 22
C1 C2
S1 1
2
1 2
DIN
40A
DIN
40B
7
DIN
44
12B
R-
Br+
-X6
19 20
DO
UT4
2A
DO
UT4
2B
13
14
12
S3
DIN
49
11
S2
DIN
48
N
T1Festo CMMP-AS-...-3A-M3
con CAMC-G-S3
L
PE
24 V DC0 V DC
Solo se representan las conexiones relevantes
Entr
ada
PLC:
R
etro
seña
l Saf
ety
T1
Sal
ida
PLC
: H
abili
taci
ón d
el
regu
lado
r T1
Sal
ida
PLC:
H
abili
taci
ón d
e pa
so
de s
alid
a T1
Unidad deentrada pararequisitos deseguridad
3
4
13
14
1
2
3
Y1
1
2
V1
p
S4
3
1 T1: Controlador de motor con módulo deseguridad (solo se representan lasconexiones relevantes)
2 S1: Unidad de entrada para requisitos deseguridad
3 V1/Y1: Válvula y unidad de bloqueoS4: Pulsador para supervisión del control dela unidad de bloqueo
Fig. 3.6 Ejemplo de circuito de unidad de bloqueo
Notas sobre el ejemplo de circuito:– En el circuito de entrada de las unidades de entrada para requisitos de seguridad S1, para el
pulsador de confirmación S2 y para el pulsador de arranque S3 tiene lugar una detección del
circuito cruzado mediante el módulo de seguridad CAMC-G-S3.
– Al accionar el pulsador de arranque S3 tiene lugar el rearranque.
– El contacto de recibo C1, C2 debería ser interrogado a través del control. Cuando ha tenido lugar un
requisito de seguridad debería retirarse la habilitación del regulador.
– Si el módulo de seguridad CAMC-G-S3 detecta una vulneración de una condición de seguridad, p. ej.
en el cableado de la conexión, pasa al estado de avería. El acuse de recibo del error tiene lugar a
través del pulsador de confirmación S2.
– La unidad de bloqueo se controla a través de la salida BR+/BR- del controlador de motor (T1) y essupervisado por el módulo de seguridad CAMC-G-S3 a través del interruptor S4. (Nota: A tal fin se
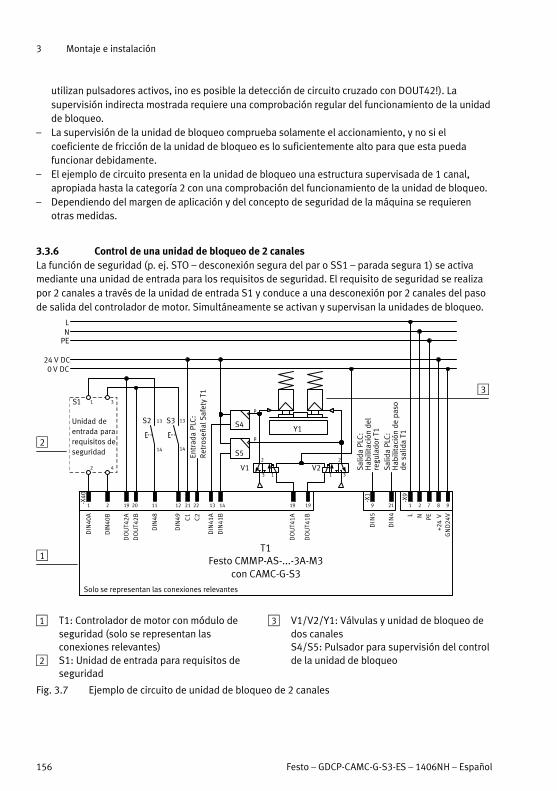
3 Montaje e instalación
156 Festo – GDCP-CAMC-G-S3-ES – 1406NH – Español
utilizan pulsadores activos, ¡no es posible la detección de circuito cruzado con DOUT42!). Lasupervisión indirecta mostrada requiere una comprobación regular del funcionamiento de la unidadde bloqueo.
– La supervisión de la unidad de bloqueo comprueba solamente el accionamiento, y no si elcoeficiente de fricción de la unidad de bloqueo es lo suficientemente alto para que esta puedafuncionar debidamente.
– El ejemplo de circuito presenta en la unidad de bloqueo una estructura supervisada de 1 canal,apropiada hasta la categoría 2 con una comprobación del funcionamiento de la unidad de bloqueo.
– Dependiendo del margen de aplicación y del concepto de seguridad de la máquina se requierenotras medidas.
3.3.6 Control de una unidad de bloqueo de 2 canalesLa función de seguridad (p. ej. STO – desconexión segura del par o SS1 – parada segura 1) se activamediante una unidad de entrada para los requisitos de seguridad. El requisito de seguridad se realizapor 2 canales a través de la unidad de entrada S1 y conduce a una desconexión por 2 canales del pasode salida del controlador de motor. Simultáneamente se activan y supervisan la unidades de bloqueo.
1 2 7 8 9
L
PE
+24
VG
ND
24VN
-X9
219
DIN
4
DIN
5-X
1
-X40
21 22
C1 C2
S1 1
2
1 2
DIN
40A
DIN
40B
14
DIN
41B
19 20
DO
UT4
2A
DO
UT4
2B
13
14
12
S3
DIN
49
11
S2
DIN
48
19
DO
UT4
1A
DO
UT4
1B
N
T1Festo CMMP-AS-...-3A-M3
con CAMC-G-S3
L
PE
24 V DC0 V DC
Solo se representan las conexiones relevantes
Entr
ada
PLC:
R
etro
seña
l Saf
ety
T1
Sal
ida
PLC:
H
abili
taci
ón d
el
regu
lado
r T1
Sal
ida
PLC:
H
abili
taci
ón d
e pa
so
de s
alid
a T1
Unidad deentrada pararequisitos deseguridad
13
14
3
4
1
2
3
V2
p
1
2
13
2
Y1S4
p
S5
V1
13
DIN
41A
19
3
1 T1: Controlador de motor con módulo deseguridad (solo se representan lasconexiones relevantes)
2 S1: Unidad de entrada para requisitos deseguridad
3 V1/V2/Y1: Válvulas y unidad de bloqueo dedos canalesS4/S5: Pulsador para supervisión del controlde la unidad de bloqueo
Fig. 3.7 Ejemplo de circuito de unidad de bloqueo de 2 canales
3 Montaje e instalación
Festo – GDCP-CAMC-G-S3-ES – 1406NH – Español 157
Notas sobre el ejemplo de circuito:– En el circuito de entrada para las unidades de entrada para requisitos de seguridad S1, para el
pulsador de confirmación S2 y para el pulsador de arranque S3 tiene lugar una detección del
circuito cruzado mediante el módulo de seguridad CAMC-G-S3.
– Al accionar el pulsador de arranque S3 tiene lugar el rearranque.
– Si el módulo de seguridad CAMC-G-S3 detecta una vulneración de una condición de seguridad, p. ej.
en el cableado de la conexión, pasa al estado de avería. El acuse de recibo del error tiene lugar a
través del pulsador de confirmación S2.
– Las unidades de bloqueo se controlan a través de la salida de dos canales DOUT41A/DOUT41B del
módulo de seguridad.
– Si las válvulas para las unidades de bloqueo necesitan más corriente de la que puede suministrar
DOUR41, debe interconectarse un relé adecuado (con contactos de conducción forzada y
retroseñal). Alternativamente se debe controlar si se puede utilizar la salida BR+/BR- del
controlador de motor T1.
– El módulo de seguridad supervisa la función de las unidades de bloqueo a través de los pulsadores
S4 y S5 (nota: A tal fin se utilizan pulsadores activos, ¡no es posible la detección de circuito cruzado
con DOUT41!). La supervisión indirecta mostrada requiere una comprobación regular del
funcionamiento de la unidad de bloqueo.
– La supervisión de la unidad de bloqueo comprueba solamente el accionamiento, y no si el
coeficiente de fricción de la unidad de bloqueo es lo suficientemente alto para que esta pueda
funcionar debidamente.
– El ejemplo de circuito presenta en la unidad de bloqueo una estructura de 2 canales, apropiada
hasta la categoría 3 con una comprobación del funcionamiento de la unidad de bloqueo.
– Dependiendo del margen de aplicación y del concepto de seguridad de la máquina se requieren
otras medidas.
3.3.7 Conexión de encoders para funciones de seguridad dinámicasLa supervisión de los encoders se realiza a través de los racores rápidos [X2A], [X2B] y [X10].
Dependiendo de los valores medidos incrementales o absolutos se pueden ejecutar controles de
velocidad y de parada.
En el modo de funcionamiento “Automático”, la función de seguridad (p. ej. STO – Desconexión segura
del par o SS1 – Parada segura 1) se activa mediante una unidad de entrada para los requisitos de
seguridad.
La función de seguridad “Velocidad con limitación segura (SLS)” se solicita a través del selector del
modo de funcionamiento S6 en la posición “Manual”.
El requisito de seguridad se realiza por 2 canales a través de la unidad de entrada S1 y conduce a una
desconexión por 2 canales del paso de salida del controlador de motor. Si se ha llevado a cabo la
desconexión del paso de salida, esto se emite a través del contacto libre de potencial C1/C2 del
controlador de motor.
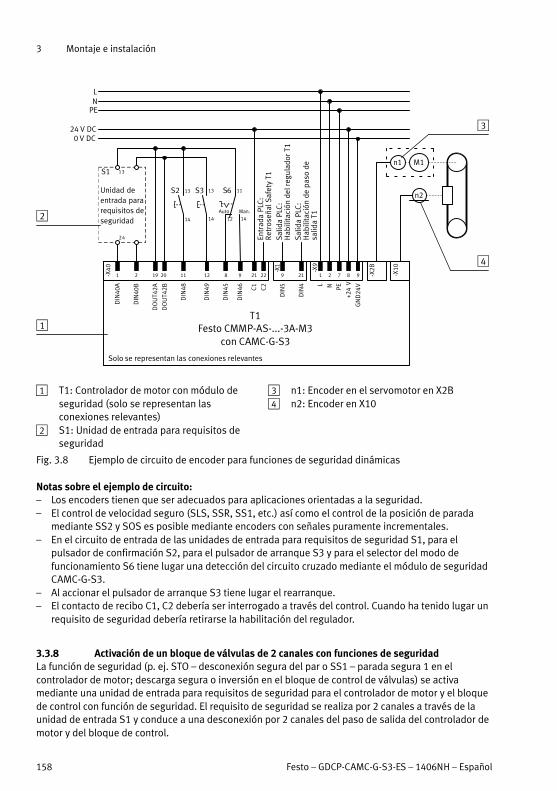
3 Montaje e instalación
158 Festo – GDCP-CAMC-G-S3-ES – 1406NH – Español
1 2 7 8 9
L
PE
+24
V
GN
D24
VN
-X9
219
DIN
4
DIN
5-X
122
C2
-X2B
-X10
n1 M1
n2
8 9
DIN
46
DIN
45
S6
Man.Auto
11
12 14
21
C1
-X40
S1 13
24
1 2
DIN
40A
DIN
40B
19 20
DO
UT4
2A
DO
UT4
2B
13
14
12
S3
DIN
49
11
S2D
IN48
13
14
N
T1Festo CMMP-AS-...-3A-M3
con CAMC-G-S3
L
PE
24 V DC0 V DC
Solo se representan las conexiones relevantes
Entr
ada
PLC:
R
etro
seña
l Saf
ety
T1S
alid
a PL
C:
Hab
ilita
ción
del
reg
ulad
or T
1S
alid
a PL
C:
Hab
ilita
ción
de
paso
de
salid
a T1
Unidad deentrada pararequisitos deseguridad
1
2
3
4
1 T1: Controlador de motor con módulo deseguridad (solo se representan lasconexiones relevantes)
2 S1: Unidad de entrada para requisitos deseguridad
3 n1: Encoder en el servomotor en X2B4 n2: Encoder en X10
Fig. 3.8 Ejemplo de circuito de encoder para funciones de seguridad dinámicas
Notas sobre el ejemplo de circuito:– Los encoders tienen que ser adecuados para aplicaciones orientadas a la seguridad.– El control de velocidad seguro (SLS, SSR, SS1, etc.) así como el control de la posición de parada
mediante SS2 y SOS es posible mediante encoders con señales puramente incrementales.– En el circuito de entrada de las unidades de entrada para requisitos de seguridad S1, para el
pulsador de confirmación S2, para el pulsador de arranque S3 y para el selector del modo defuncionamiento S6 tiene lugar una detección del circuito cruzado mediante el módulo de seguridadCAMC-G-S3.
– Al accionar el pulsador de arranque S3 tiene lugar el rearranque.– El contacto de recibo C1, C2 debería ser interrogado a través del control. Cuando ha tenido lugar un
requisito de seguridad debería retirarse la habilitación del regulador.
3.3.8 Activación de un bloque de válvulas de 2 canales con funciones de seguridadLa función de seguridad (p. ej. STO – desconexión segura del par o SS1 – parada segura 1 en elcontrolador de motor; descarga segura o inversión en el bloque de control de válvulas) se activamediante una unidad de entrada para requisitos de seguridad para el controlador de motor y el bloquede control con función de seguridad. El requisito de seguridad se realiza por 2 canales a través de launidad de entrada S1 y conduce a una desconexión por 2 canales del paso de salida del controlador demotor y del bloque de control.
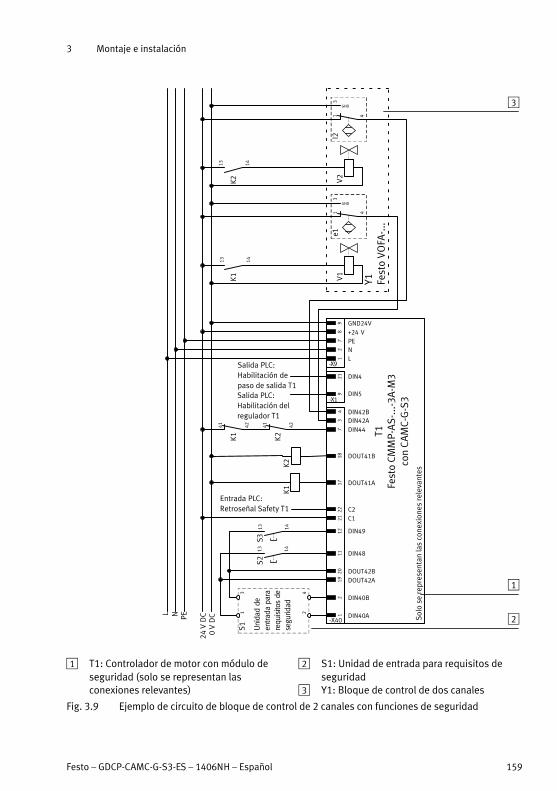
3 Montaje e instalación
Festo – GDCP-CAMC-G-S3-ES – 1406NH – Español 159
12
78
9
L
PE+24 VGND24V
N
-X40
219
DIN4
DIN5
21 2
2
C1C2
17
18
DOUT41A
DOUT41B
7 DIN44
K1
K1K2
K2
41 4241 42
K1K2
V1
1 4
GND
3V
2I2
e1
GND
33
4
DIN42ADIN42B
-X9
S1
1 2 12
DIN40A
DIN40B
19 2
0
DOUT42ADOUT42B
13 14
12
S3
DIN49
11
S2
DIN48
3 4
13 14
-X1
13 14
13 14
N
Y1 Fest
o V
OFA
-...
L PE
24 V
DC
0 V
DC
Salida PLC: Habilitación delregulador T1
Salida PLC: Habilitación depaso de salida T1
Uni
dad
deen
trad
a pa
rare
quis
itos
dese
gurid
ad
Entrada PLC: Retroseñal Safety T1
T1Fe
sto
CMM
P-A
S-.
..-3A
-M3
con
CA
MC-
G-S
3S
olo
se r
epre
sent
an la
s co
nexi
ones
rel
evan
tes
1 4
1
2
3
1 T1: Controlador de motor con módulo deseguridad (solo se representan lasconexiones relevantes)
2 S1: Unidad de entrada para requisitos deseguridad
3 Y1: Bloque de control de dos canales
Fig. 3.9 Ejemplo de circuito de bloque de control de 2 canales con funciones de seguridad
3 Montaje e instalación
160 Festo – GDCP-CAMC-G-S3-ES – 1406NH – Español
Notas sobre el ejemplo de circuito:– En el circuito de entrada para los interruptores S1, para el pulsador de confirmación S2 y para el
pulsador de arranque S3 tiene lugar una detección del circuito cruzado mediante el módulo de
seguridad CAMC-G-S3.
– Al accionar el pulsador de arranque S3 tiene lugar el rearranque.
– Si el módulo de seguridad CAMC-G-S3 detecta una vulneración de una condición de seguridad, p. ej.
en el cableado de la conexión, pasa al estado de avería. El acuse de recibo del error tiene lugar a
través del pulsador de confirmación S2.
– Las entradas DIN42A/B tienen que configurarse de modo que supervisen la conexión y la
desconexión del bloque de control V1. No es posible una conexión en serie de los contactos
contactores 41/42 de los contactores K1 y K2, puesto que los sensores de proximidad inductivos
utilizados no lo permiten.
– El contacto de recibo C1, C2 debería ser interrogado a través del control. Si ha tenido lugar un
requisito de seguridad debería retirarse la habilitación del regulador.
– El circuito de protección de entrada presenta una estructura de 2 canales que es adecuada para la
categoría 4.
– Dependiendo del margen de aplicación y del concepto de seguridad de la máquina se requieren
otras medidas.
4 Puesta a punto
Festo – GDCP-CAMC-G-S3-ES – 1406NH – Español 161
4 Puesta a punto
Este capítulo describe la puesta a punto del módulo de seguridad. Hallará información
sobre la puesta a punto del controlador de motor en:
� Descripción del hardware “Montaje e instalación” GDCP-CMMP-M3-HW-...
� Ayuda del plugin de FCT para CMMP-AS.
NotaEn este documento, la puesta a punto no se refiere al primer uso previsto por el cliente
final, sino a la puesta a punto por el fabricante de la máquina durante el montaje de la
máquina.
Nota¡Merma de la función de seguridad!
La ausencia de funciones de seguridad puede causar daños graves irreversibles, p. ej.
debido a movimientos inesperados del sistema de actuadores conectado.
� Operar el módulo de seguridad únicamente:
– cuando esté montado,
– después de que el módulo de seguridad se haya parametrizado por completo,
– cuando se hayan instalado todas las medidas de seguridad, incluida la función
de seguridad, y se haya comprobado su capacidad de funcionamiento.
� Validar la función de seguridad para completar la puesta a punto � Sección 4.8.
Un cableado incorrecto, el uso de un módulo de seguridad equivocado o componentes
externos escogidos sin tener en cuenta la categoría causan la merma de la función de
seguridad.
� Lleve a cabo una evaluación de riesgos para su aplicación y diseñe el modo de conexión y los
componentes según los resultados de la misma.
� Tenga en cuenta los ejemplos � Sección 3.3.
4 Puesta a punto
162 Festo – GDCP-CAMC-G-S3-ES – 1406NH – Español
4.1 Antes de la puesta a punto
Realice los pasos siguientes para preparar la puesta a punto:
1. Asegúrese de que el módulo de seguridad se ha montado correctamente (�Sección 3.1).
2. Compruebe la instalación eléctrica (cables de conexión, asignación de contactos � Sección 3.2).
¿Están conectados todos los conductores protectores PE?
4.2 Ajuste de los interruptores DIL
En el módulo de seguridad hay interruptores DIL para activar y controlar la configuración del bus. La
funcionalidad de los interruptores DIL es idéntica para todos los módulos de la ranura Ext3 y depende
de la interfaz de bus utilizada.
Ajuste los interruptores DIL como se indica en la descripción del hardware “Montaje e
instalación” GDCP-CMMP-M3-HW-... o en la correspondiente documentación específica
del bus, � Tab. 3, página 11.
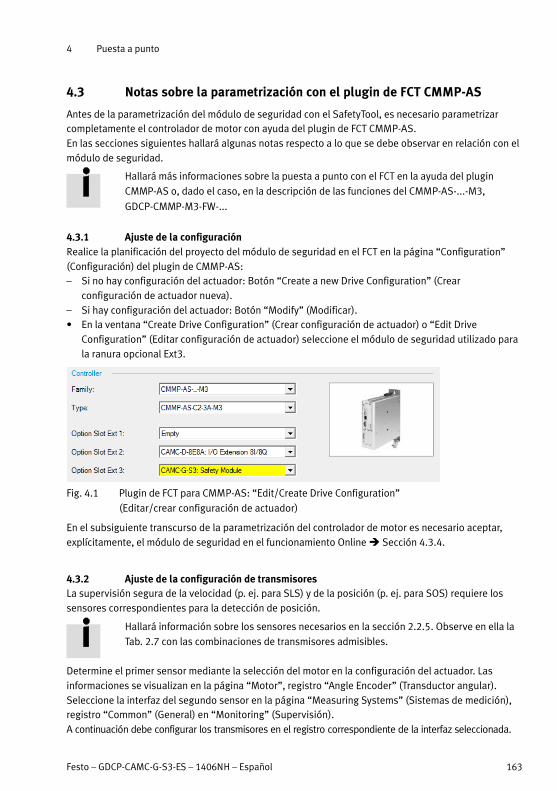
4 Puesta a punto
Festo – GDCP-CAMC-G-S3-ES – 1406NH – Español 163
4.3 Notas sobre la parametrización con el plugin de FCT CMMP-AS
Antes de la parametrización del módulo de seguridad con el SafetyTool, es necesario parametrizarcompletamente el controlador de motor con ayuda del plugin de FCT CMMP-AS.En las secciones siguientes hallará algunas notas respecto a lo que se debe observar en relación con elmódulo de seguridad.
Hallará más informaciones sobre la puesta a punto con el FCT en la ayuda del plugin
CMMP-AS o, dado el caso, en la descripción de las funciones del CMMP-AS-...-M3,
GDCP-CMMP-M3-FW-...
4.3.1 Ajuste de la configuraciónRealice la planificación del proyecto del módulo de seguridad en el FCT en la página “Configuration”(Configuración) del plugin de CMMP-AS:– Si no hay configuración del actuador: Botón “Create a new Drive Configuration” (Crear
configuración de actuador nueva).– Si hay configuración del actuador: Botón “Modify” (Modificar).� En la ventana “Create Drive Configuration” (Crear configuración de actuador) o “Edit Drive
Configuration” (Editar configuración de actuador) seleccione el módulo de seguridad utilizado parala ranura opcional Ext3.
Fig. 4.1 Plugin de FCT para CMMP-AS: “Edit/Create Drive Configuration”
(Editar/crear configuración de actuador)
En el subsiguiente transcurso de la parametrización del controlador de motor es necesario aceptar,explícitamente, el módulo de seguridad en el funcionamiento Online � Sección 4.3.4.
4.3.2 Ajuste de la configuración de transmisoresLa supervisión segura de la velocidad (p. ej. para SLS) y de la posición (p. ej. para SOS) requiere lossensores correspondientes para la detección de posición.
Hallará información sobre los sensores necesarios en la sección 2.2.5. Observe en ella la
Tab. 2.7 con las combinaciones de transmisores admisibles.
Determine el primer sensor mediante la selección del motor en la configuración del actuador. Lasinformaciones se visualizan en la página “Motor”, registro “Angle Encoder” (Transductor angular).Seleccione la interfaz del segundo sensor en la página “Measuring Systems” (Sistemas de medición),registro “Common” (General) en “Monitoring” (Supervisión).A continuación debe configurar los transmisores en el registro correspondiente de la interfaz seleccionada.
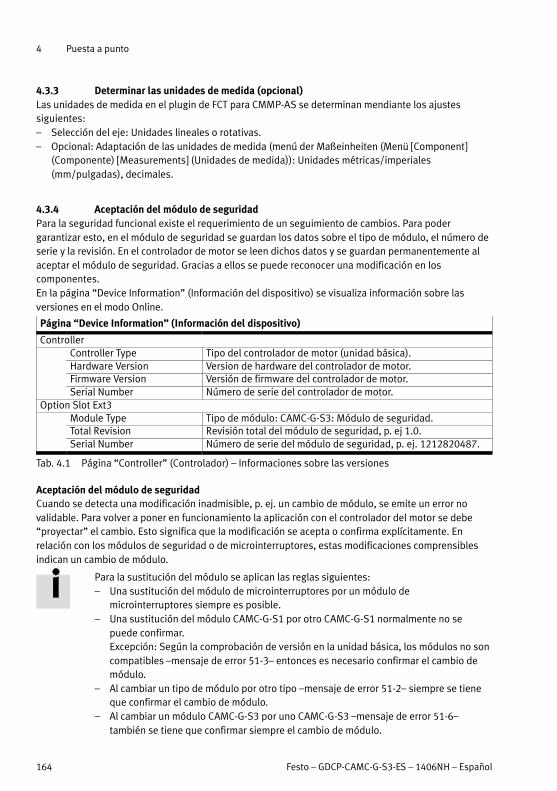
4 Puesta a punto
164 Festo – GDCP-CAMC-G-S3-ES – 1406NH – Español
4.3.3 Determinar las unidades de medida (opcional)Las unidades de medida en el plugin de FCT para CMMP-AS se determinan mendiante los ajustessiguientes:– Selección del eje: Unidades lineales o rotativas.– Opcional: Adaptación de las unidades de medida (menú der Maßeinheiten (Menü [Component]
(Componente) [Measurements] (Unidades de medida)): Unidades métricas/imperiales(mm/pulgadas), decimales.
4.3.4 Aceptación del módulo de seguridadPara la seguridad funcional existe el requerimiento de un seguimiento de cambios. Para podergarantizar esto, en el módulo de seguridad se guardan los datos sobre el tipo de módulo, el número deserie y la revisión. En el controlador de motor se leen dichos datos y se guardan permanentemente alaceptar el módulo de seguridad. Gracias a ellos se puede reconocer una modificación en loscomponentes.En la página “Device Information” (Información del dispositivo) se visualiza información sobre lasversiones en el modo Online.
Página “Device Information” (Información del dispositivo)
ControllerController Type Tipo del controlador de motor (unidad básica).Hardware Version Version de hardware del controlador de motor.Firmware Version Versión de firmware del controlador de motor.Serial Number Número de serie del controlador de motor.
Option Slot Ext3Module Type Tipo de módulo: CAMC-G-S3: Módulo de seguridad.Total Revision Revisión total del módulo de seguridad, p. ej 1.0.Serial Number Número de serie del módulo de seguridad, p. ej. 1212820487.
Tab. 4.1 Página “Controller” (Controlador) – Informaciones sobre las versiones
Aceptación del módulo de seguridadCuando se detecta una modificación inadmisible, p. ej. un cambio de módulo, se emite un error novalidable. Para volver a poner en funcionamiento la aplicación con el controlador del motor se debe“proyectar” el cambio. Esto significa que la modificación se acepta o confirma explícitamente. Enrelación con los módulos de seguridad o de microinterruptores, estas modificaciones comprensiblesindican un cambio de módulo.
Para la sustitución del módulo se aplican las reglas siguientes:– Una sustitución del módulo de microinterruptores por un módulo de
microinterruptores siempre es posible.– Una sustitución del módulo CAMC-G-S1 por otro CAMC-G-S1 normalmente no se
puede confirmar. Excepción: Según la comprobación de versión en la unidad básica, los módulos no soncompatibles –mensaje de error 51-3– entonces es necesario confirmar el cambio demódulo.
– Al cambiar un tipo de módulo por otro tipo –mensaje de error 51-2– siempre se tieneque confirmar el cambio de módulo.
– Al cambiar un módulo CAMC-G-S3 por uno CAMC-G-S3 –mensaje de error 51-6–también se tiene que confirmar siempre el cambio de módulo.
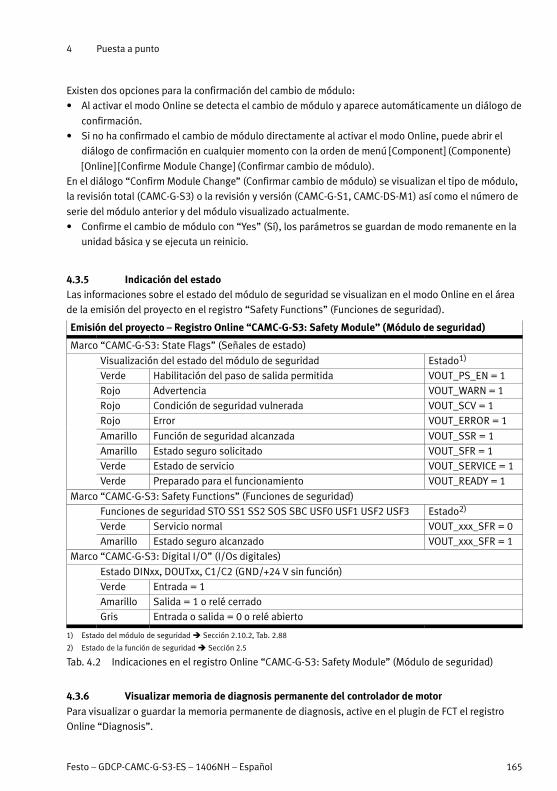
4 Puesta a punto
Festo – GDCP-CAMC-G-S3-ES – 1406NH – Español 165
Existen dos opciones para la confirmación del cambio de módulo:
� Al activar el modo Online se detecta el cambio de módulo y aparece automáticamente un diálogo de
confirmación.
� Si no ha confirmado el cambio de módulo directamente al activar el modo Online, puede abrir el
diálogo de confirmación en cualquier momento con la orden de menú [Component] (Componente)
[Online] [Confirme Module Change] (Confirmar cambio de módulo).
En el diálogo “Confirm Module Change” (Confirmar cambio de módulo) se visualizan el tipo de módulo,
la revisión total (CAMC-G-S3) o la revisión y versión (CAMC-G-S1, CAMC-DS-M1) así como el número de
serie del módulo anterior y del módulo visualizado actualmente.
� Confirme el cambio de módulo con “Yes” (Sí), los parámetros se guardan de modo remanente en la
unidad básica y se ejecuta un reinicio.
4.3.5 Indicación del estadoLas informaciones sobre el estado del módulo de seguridad se visualizan en el modo Online en el área
de la emisión del proyecto en el registro “Safety Functions” (Funciones de seguridad).
Emisión del proyecto – Registro Online “CAMC-G-S3: Safety Module” (Módulo de seguridad)
Marco “CAMC-G-S3: State Flags” (Señales de estado)
Visualización del estado del módulo de seguridad Estado1)
Verde Habilitación del paso de salida permitida VOUT_PS_EN = 1
Rojo Advertencia VOUT_WARN = 1
Rojo Condición de seguridad vulnerada VOUT_SCV = 1
Rojo Error VOUT_ERROR = 1
Amarillo Función de seguridad alcanzada VOUT_SSR = 1
Amarillo Estado seguro solicitado VOUT_SFR = 1
Verde Estado de servicio VOUT_SERVICE = 1
Verde Preparado para el funcionamiento VOUT_READY = 1
Marco “CAMC-G-S3: Safety Functions” (Funciones de seguridad)
Funciones de seguridad STO SS1 SS2 SOS SBC USF0 USF1 USF2 USF3 Estado2)
Verde Servicio normal VOUT_xxx_SFR = 0
Amarillo Estado seguro alcanzado VOUT_xxx_SFR = 1
Marco “CAMC-G-S3: Digital I/O” (I/Os digitales)
Estado DINxx, DOUTxx, C1/C2 (GND/+24 V sin función)
Verde Entrada = 1
Amarillo Salida = 1 o relé cerrado
Gris Entrada o salida = 0 o relé abierto
1) Estado del módulo de seguridad � Sección 2.10.2, Tab. 2.88
2) Estado de la función de seguridad � Sección 2.5
Tab. 4.2 Indicaciones en el registro Online “CAMC-G-S3: Safety Module” (Módulo de seguridad)
4.3.6 Visualizar memoria de diagnosis permanente del controlador de motor
Para visualizar o guardar la memoria permanente de diagnosis, active en el plugin de FCT el registro
Online “Diagnosis”.
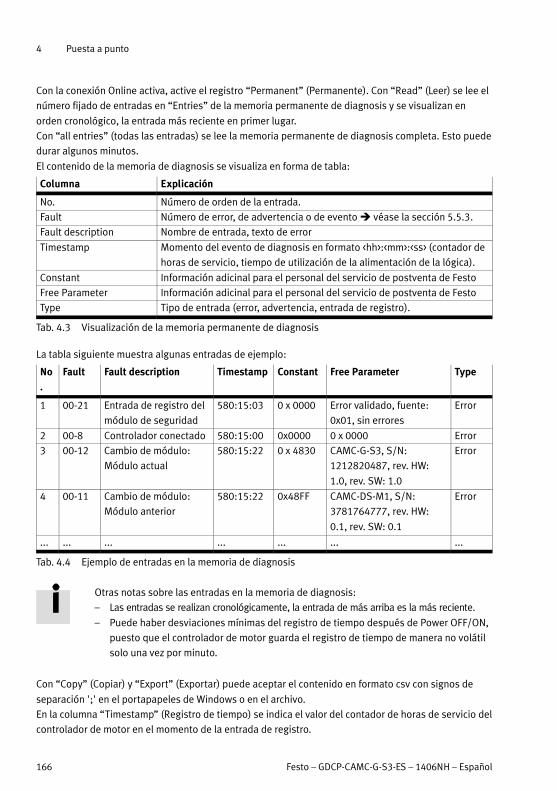
4 Puesta a punto
166 Festo – GDCP-CAMC-G-S3-ES – 1406NH – Español
Con la conexión Online activa, active el registro “Permanent” (Permanente). Con “Read” (Leer) se lee el
número fijado de entradas en “Entries” de la memoria permanente de diagnosis y se visualizan en
orden cronológico, la entrada más reciente en primer lugar.
Con “all entries” (todas las entradas) se lee la memoria permanente de diagnosis completa. Esto puede
durar algunos minutos.
El contenido de la memoria de diagnosis se visualiza en forma de tabla:
Columna Explicación
No. Número de orden de la entrada.
Fault Número de error, de advertencia o de evento � véase la sección 5.5.3.
Fault description Nombre de entrada, texto de error
Timestamp Momento del evento de diagnosis en formato <hh>:<mm>:<ss> (contador de
horas de servicio, tiempo de utilización de la alimentación de la lógica).
Constant Información adicinal para el personal del servicio de postventa de Festo
Free Parameter Información adicinal para el personal del servicio de postventa de Festo
Type Tipo de entrada (error, advertencia, entrada de registro).
Tab. 4.3 Visualización de la memoria permanente de diagnosis
La tabla siguiente muestra algunas entradas de ejemplo:
No.
Fault Fault description Timestamp Constant Free Parameter Type
1 00-21 Entrada de registro del
módulo de seguridad
580:15:03 0 x 0000 Error validado, fuente:
0x01, sin errores
Error
2 00-8 Controlador conectado 580:15:00 0x0000 0 x 0000 Error
3 00-12 Cambio de módulo:
Módulo actual
580:15:22 0 x 4830 CAMC-G-S3, S/N:
1212820487, rev. HW:
1.0, rev. SW: 1.0
Error
4 00-11 Cambio de módulo:
Módulo anterior
580:15:22 0x48FF CAMC-DS-M1, S/N:
3781764777, rev. HW:
0.1, rev. SW: 0.1
Error
... ... ... ... ... ... ...
Tab. 4.4 Ejemplo de entradas en la memoria de diagnosis
Otras notas sobre las entradas en la memoria de diagnosis:
– Las entradas se realizan cronológicamente, la entrada de más arriba es la más reciente.
– Puede haber desviaciones mínimas del registro de tiempo después de Power OFF/ON,
puesto que el controlador de motor guarda el registro de tiempo de manera no volátil
solo una vez por minuto.
Con “Copy” (Copiar) y “Export” (Exportar) puede aceptar el contenido en formato csv con signos de
separación ';' en el portapapeles de Windows o en el archivo.
En la columna “Timestamp” (Registro de tiempo) se indica el valor del contador de horas de servicio del
controlador de motor en el momento de la entrada de registro.

4 Puesta a punto
Festo – GDCP-CAMC-G-S3-ES – 1406NH – Español 167
Por encima de la lista se visualiza como “Current System Time” (Hora actual del sistema)
el valor momentáneo del contador de horas de servicio del controlador de motor
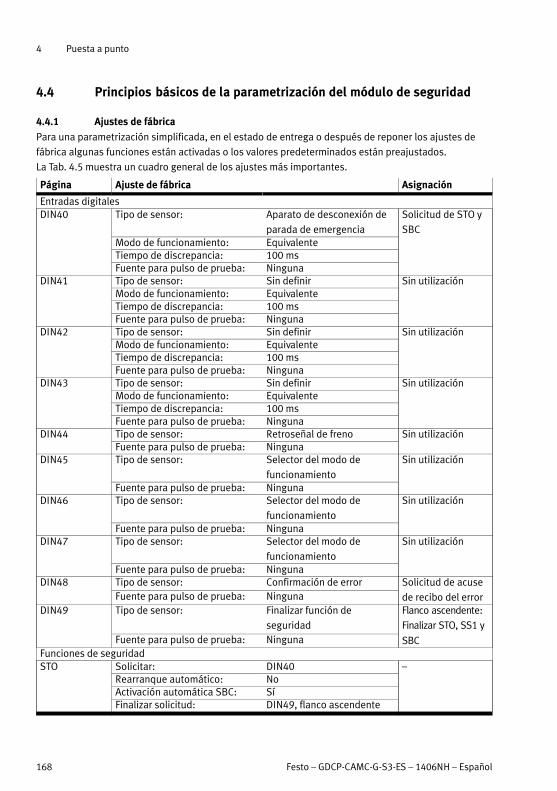
4 Puesta a punto
168 Festo – GDCP-CAMC-G-S3-ES – 1406NH – Español
4.4 Principios básicos de la parametrización del módulo de seguridad
4.4.1 Ajustes de fábrica
Para una parametrización simplificada, en el estado de entrega o después de reponer los ajustes de
fábrica algunas funciones están activadas o los valores predeterminados están preajustados.
La Tab. 4.5 muestra un cuadro general de los ajustes más importantes.
Página Ajuste de fábrica Asignación
Entradas digitalesDIN40 Tipo de sensor: Aparato de desconexión de
parada de emergencia
Solicitud de STO y
SBCModo de funcionamiento: EquivalenteTiempo de discrepancia: 100 msFuente para pulso de prueba: Ninguna
DIN41 Tipo de sensor: Sin definir Sin utilizaciónModo de funcionamiento: EquivalenteTiempo de discrepancia: 100 msFuente para pulso de prueba: Ninguna
DIN42 Tipo de sensor: Sin definir Sin utilizaciónModo de funcionamiento: EquivalenteTiempo de discrepancia: 100 msFuente para pulso de prueba: Ninguna
DIN43 Tipo de sensor: Sin definir Sin utilizaciónModo de funcionamiento: EquivalenteTiempo de discrepancia: 100 msFuente para pulso de prueba: Ninguna
DIN44 Tipo de sensor: Retroseñal de freno Sin utilizaciónFuente para pulso de prueba: Ninguna
DIN45 Tipo de sensor: Selector del modo de
funcionamiento
Sin utilización
Fuente para pulso de prueba: NingunaDIN46 Tipo de sensor: Selector del modo de
funcionamiento
Sin utilización
Fuente para pulso de prueba: NingunaDIN47 Tipo de sensor: Selector del modo de
funcionamiento
Sin utilización
Fuente para pulso de prueba: NingunaDIN48 Tipo de sensor: Confirmación de error Solicitud de acuse
de recibo del errorFuente para pulso de prueba: NingunaDIN49 Tipo de sensor: Finalizar función de
seguridad
Flanco ascendente:
Finalizar STO, SS1 y
SBCFuente para pulso de prueba: NingunaFunciones de seguridadSTO Solicitar: DIN40 –
Rearranque automático: NoActivación automática SBC: SíFinalizar solicitud: DIN49, flanco ascendente
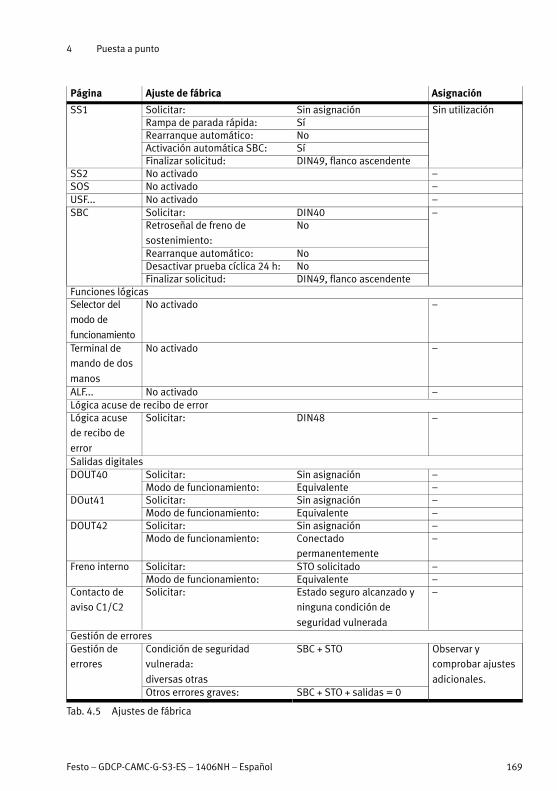
4 Puesta a punto
Festo – GDCP-CAMC-G-S3-ES – 1406NH – Español 169
Página AsignaciónAjuste de fábrica
SS1 Solicitar: Sin asignación Sin utilizaciónRampa de parada rápida: SíRearranque automático: NoActivación automática SBC: SíFinalizar solicitud: DIN49, flanco ascendente
SS2 No activado –SOS No activado –USF... No activado –SBC Solicitar: DIN40 –
Retroseñal de freno de
sostenimiento:
No
Rearranque automático: NoDesactivar prueba cíclica 24 h: NoFinalizar solicitud: DIN49, flanco ascendente
Funciones lógicasSelector del
modo de
funcionamiento
No activado –
Terminal de
mando de dos
manos
No activado –
ALF... No activado –Lógica acuse de recibo de errorLógica acuse
de recibo de
error
Solicitar: DIN48 –
Salidas digitalesDOUT40 Solicitar: Sin asignación –
Modo de funcionamiento: Equivalente –DOut41 Solicitar: Sin asignación –
Modo de funcionamiento: Equivalente –DOUT42 Solicitar: Sin asignación –
Modo de funcionamiento: Conectado
permanentemente
–
Freno interno Solicitar: STO solicitado –Modo de funcionamiento: Equivalente –
Contacto de
aviso C1/C2
Solicitar: Estado seguro alcanzado y
ninguna condición de
seguridad vulnerada
–
Gestión de erroresGestión de
errores
Condición de seguridad
vulnerada:
diversas otras
SBC + STO Observar y
comprobar ajustes
adicionales.Otros errores graves: SBC + STO + salidas = 0
Tab. 4.5 Ajustes de fábrica
4 Puesta a punto
170 Festo – GDCP-CAMC-G-S3-ES – 1406NH – Español
4.4.2 Estado de entregaEl módulo de seguridad se suministra de fábrica en el denominado “estado de entrega”.
Este se indica mediante el LED verde/rojo intermitente así como mediante los correspondientes
mensajes de estado (� Sección 2.10.2, Tab. 2.88).
Características diferentes del estado de entrega respecto a los ajustes de fábrica:
– El módulo de seguridad está “validado por completo” con la parametrización del ajuste de fábrica y,
por lo tanto, listo para el funcionamiento. El controlador de motor se puede poner en
funcionamiento, se pueden activar la habilitación de paso de salida y del regulador.
– Se suprimen todos los mensajes de error debidos a una parametrización diferente de la únidad
básica y del módulo de seguridad.
Con ello, la puesta a punto básica del controlador de motor es posible independientemente de la
periferia costosa de técnica de seguridad. Por ejemplo, el módulo de seguridad está parametrizado
como “Resolvedor” en el estado de entrega. Si se utilizan otros transmisores, el controlador de
motor podría no ponerse en marcha si no se suprime el mensaje de error del módulo de seguridad.
El estado de entrega no puede ser restablecido por el usuario. Solo es posible restablecer
los ajustes de fábrica.
4.4.3 Plugin de FCT para CMMP-AS y SafetyToolLa puesta a punto básica del controlador de motor se realiza con el plugin correspondiente de
CMMP-AS para el Festo Configuration Tool (FCT).
Este contiene la determinación de la configuración de hardware, como p. ej. el motor conectado, los
sistemas de medición, el eje y los módulos e interfaces montados en las ranuras opcionales.
La parametrización del módulo de seguridad se realiza con un software especial, el SafetyTool.
El SafetyTool se abre desde el plugin de FCT para CMMP-AS.
NotaAntes de iniciar el SafetyTool es obligatoriamente necesario cargar y guardar la
configuración del hardware así como, dado el caso, las unidades de medida fijadas en
el controlador de motor � Sección 4.3.
Esto es necesario para la adquisición de datos en el SafetyTool.
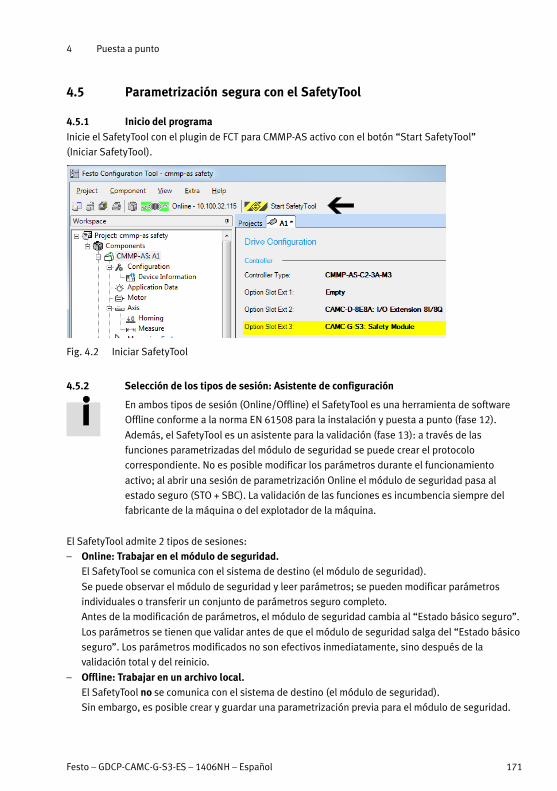
4 Puesta a punto
Festo – GDCP-CAMC-G-S3-ES – 1406NH – Español 171
4.5 Parametrización segura con el SafetyTool
4.5.1 Inicio del programa
Inicie el SafetyTool con el plugin de FCT para CMMP-AS activo con el botón “Start SafetyTool”
(Iniciar SafetyTool).
Fig. 4.2 Iniciar SafetyTool
4.5.2 Selección de los tipos de sesión: Asistente de configuración
En ambos tipos de sesión (Online/Offline) el SafetyTool es una herramienta de software
Offline conforme a la norma EN 61508 para la instalación y puesta a punto (fase 12).
Además, el SafetyTool es un asistente para la validación (fase 13): a través de las
funciones parametrizadas del módulo de seguridad se puede crear el protocolo
correspondiente. No es posible modificar los parámetros durante el funcionamiento
activo; al abrir una sesión de parametrización Online el módulo de seguridad pasa al
estado seguro (STO + SBC). La validación de las funciones es incumbencia siempre del
fabricante de la máquina o del explotador de la máquina.
El SafetyTool admite 2 tipos de sesiones:
– Online: Trabajar en el módulo de seguridad.El SafetyTool se comunica con el sistema de destino (el módulo de seguridad).
Se puede observar el módulo de seguridad y leer parámetros; se pueden modificar parámetros
individuales o transferir un conjunto de parámetros seguro completo.
Antes de la modificación de parámetros, el módulo de seguridad cambia al “Estado básico seguro”.
Los parámetros se tienen que validar antes de que el módulo de seguridad salga del “Estado básico
seguro”. Los parámetros modificados no son efectivos inmediatamente, sino después de la
validación total y del reinicio.
– Offline: Trabajar en un archivo local.El SafetyTool no se comunica con el sistema de destino (el módulo de seguridad).
Sin embargo, es posible crear y guardar una parametrización previa para el módulo de seguridad.
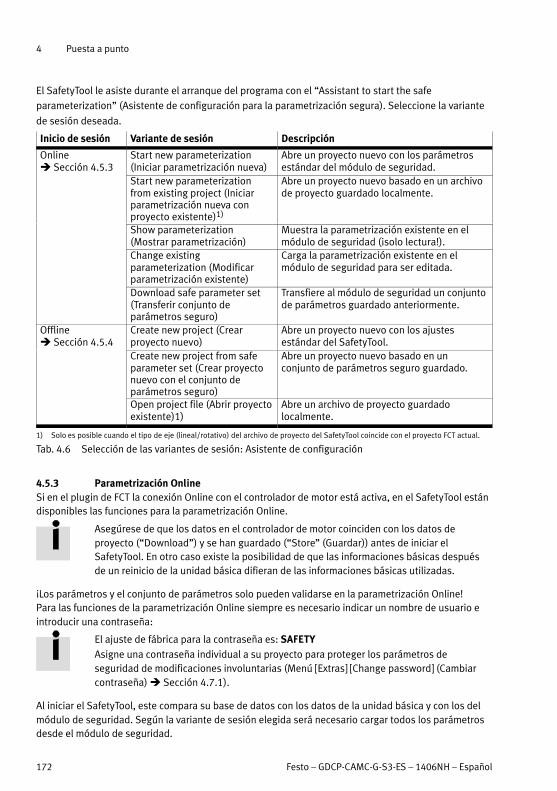
4 Puesta a punto
172 Festo – GDCP-CAMC-G-S3-ES – 1406NH – Español
El SafetyTool le asiste durante el arranque del programa con el “Assistant to start the safe
parameterization” (Asistente de configuración para la parametrización segura). Seleccione la variante
de sesión deseada.
Inicio de sesión Variante de sesión Descripción
Online� Sección 4.5.3
Start new parameterization(Iniciar parametrización nueva)
Abre un proyecto nuevo con los parámetrosestándar del módulo de seguridad.
Start new parameterizationfrom existing project (Iniciarparametrización nueva conproyecto existente)1)
Abre un proyecto nuevo basado en un archivode proyecto guardado localmente.
Show parameterization(Mostrar parametrización)
Muestra la parametrización existente en elmódulo de seguridad (¡solo lectura!).
Change existingparameterization (Modificarparametrización existente)
Carga la parametrización existente en elmódulo de seguridad para ser editada.
Download safe parameter set(Transferir conjunto deparámetros seguro)
Transfiere al módulo de seguridad un conjuntode parámetros guardado anteriormente.
Offline� Sección 4.5.4
Create new project (Crearproyecto nuevo)
Abre un proyecto nuevo con los ajustesestándar del SafetyTool.
Create new project from safeparameter set (Crear proyectonuevo con el conjunto deparámetros seguro)
Abre un proyecto nuevo basado en unconjunto de parámetros seguro guardado.
Open project file (Abrir proyectoexistente)1)
Abre un archivo de proyecto guardadolocalmente.
1) Solo es posible cuando el tipo de eje (lineal/rotativo) del archivo de proyecto del SafetyTool coincide con el proyecto FCT actual.
Tab. 4.6 Selección de las variantes de sesión: Asistente de configuración
4.5.3 Parametrización OnlineSi en el plugin de FCT la conexión Online con el controlador de motor está activa, en el SafetyTool estándisponibles las funciones para la parametrización Online.
Asegúrese de que los datos en el controlador de motor coinciden con los datos deproyecto (“Download”) y se han guardado (“Store” (Guardar)) antes de iniciar elSafetyTool. En otro caso existe la posibilidad de que las informaciones básicas despuésde un reinicio de la unidad básica difieran de las informaciones básicas utilizadas.
¡Los parámetros y el conjunto de parámetros solo pueden validarse en la parametrización Online!Para las funciones de la parametrización Online siempre es necesario indicar un nombre de usuario eintroducir una contraseña:
El ajuste de fábrica para la contraseña es: SAFETYAsigne una contraseña individual a su proyecto para proteger los parámetros deseguridad de modificaciones involuntarias (Menú [Extras] [Change password] (Cambiarcontraseña) � Sección 4.7.1).
Al iniciar el SafetyTool, este compara su base de datos con los datos de la unidad básica y con los delmódulo de seguridad. Según la variante de sesión elegida será necesario cargar todos los parámetrosdesde el módulo de seguridad.
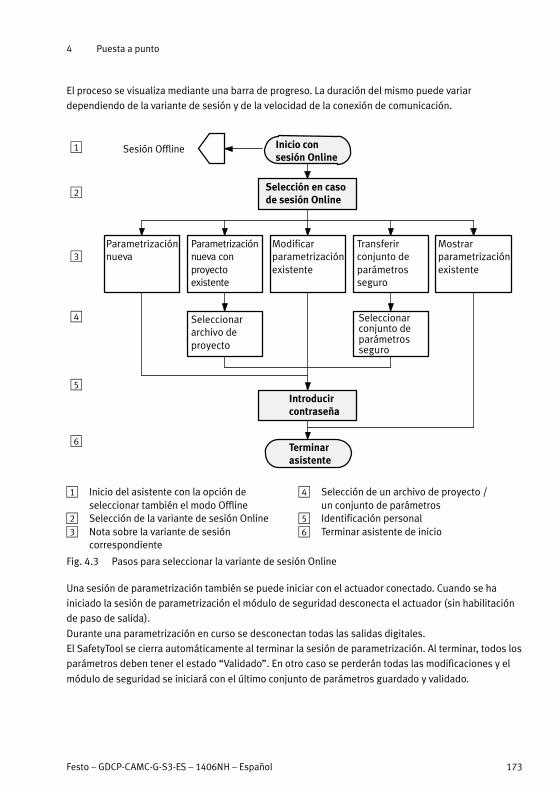
4 Puesta a punto
Festo – GDCP-CAMC-G-S3-ES – 1406NH – Español 173
El proceso se visualiza mediante una barra de progreso. La duración del mismo puede variar
dependiendo de la variante de sesión y de la velocidad de la conexión de comunicación.
1
2
3
4
5
6
Inicio con sesión Online
Sesión Offline
Selección en casode sesión Online
Introducircontraseña
Terminarasistente
Parametrizaciónnueva
Parametrizaciónnueva conproyectoexistente
Modificarparametrizaciónexistente
Transferirconjunto deparámetrosseguro
Mostrarparametrizaciónexistente
Seleccionar conjunto de parámetrosseguro
Seleccionararchivo deproyecto
1 Inicio del asistente con la opción deseleccionar también el modo Offline
2 Selección de la variante de sesión Online3 Nota sobre la variante de sesión
correspondiente
4 Selección de un archivo de proyecto /un conjunto de parámetros
5 Identificación personal6 Terminar asistente de inicio
Fig. 4.3 Pasos para seleccionar la variante de sesión Online
Una sesión de parametrización también se puede iniciar con el actuador conectado. Cuando se ha
iniciado la sesión de parametrización el módulo de seguridad desconecta el actuador (sin habilitación
de paso de salida).
Durante una parametrización en curso se desconectan todas las salidas digitales.
El SafetyTool se cierra automáticamente al terminar la sesión de parametrización. Al terminar, todos los
parámetros deben tener el estado “Validado”. En otro caso se perderán todas las modificaciones y el
módulo de seguridad se iniciará con el último conjunto de parámetros guardado y validado.
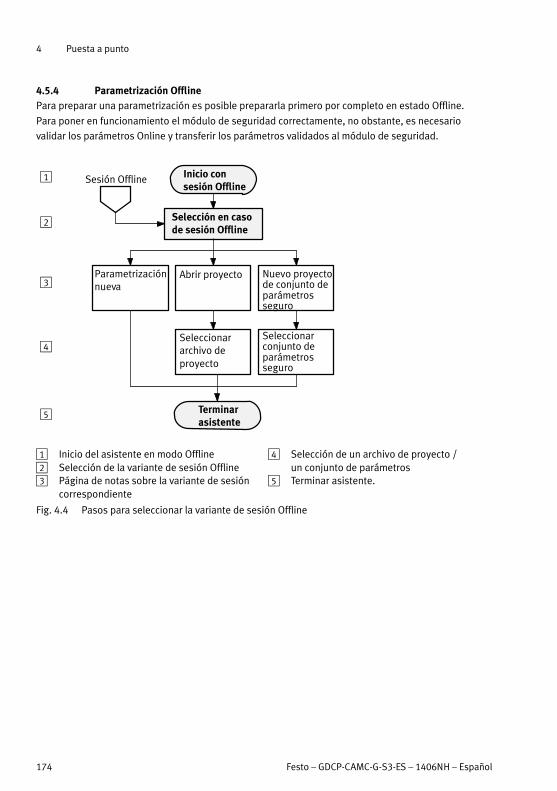
4 Puesta a punto
174 Festo – GDCP-CAMC-G-S3-ES – 1406NH – Español
4.5.4 Parametrización OfflinePara preparar una parametrización es posible prepararla primero por completo en estado Offline.
Para poner en funcionamiento el módulo de seguridad correctamente, no obstante, es necesario
validar los parámetros Online y transferir los parámetros validados al módulo de seguridad.
1
2
3
4
5
Inicio con sesión Offline
Sesión Offline
Selección en casode sesión Offline
Terminarasistente
Parametrizaciónnueva
Abrir proyecto Nuevo proyectode conjunto deparámetrosseguro
Seleccionararchivo deproyecto
Seleccionarconjunto deparámetrosseguro
1 Inicio del asistente en modo Offline2 Selección de la variante de sesión Offline3 Página de notas sobre la variante de sesión
correspondiente
4 Selección de un archivo de proyecto /un conjunto de parámetros
5 Terminar asistente.
Fig. 4.4 Pasos para seleccionar la variante de sesión Offline
4 Puesta a punto
Festo – GDCP-CAMC-G-S3-ES – 1406NH – Español 175
4.5.5 Reglas básicas para la parametrización con el SafetyTool
Propiedades comunes de los procesos de parametrizaciónUna parametrización se compone siempre de los pasos siguientes:
1. Abrir una sesión de parametrización.
2. Modificar parámetros individuales.
3. Validar parámetros individualmente o el conjunto de parámetros completo (generación de un
código de validación).
4. Guardar permanentemente el conjunto de parámetros en el módulo de seguridad; el conjunto de
parámetros completo se considera validado.
Tras realizar otras modificaciones en los parámetros es necesario volver a ejecutar los pasos 3. y 4..
5. Cerrar la sesión de parametrización, “Activación” del conjunto de parámetros.
6. Reinicio del módulo de seguridad.
Abrir una sesión de parametrización
Al abrir una sesión de parametrización el módulo de seguridad pasa al estado básico seguro, el
actuador se desconecta (paso de salida desconectado, control seguro de freno no alimentado, DOUT4x
desconectado en el módulo de seguridad).
Durante una sesión de parametrización el estado VOUT_SERVICE es activo.
Es posible volver a conectar / arrancar el actuador solo después de cerrar la sesión de parametrización,
y únicamente si el conjunto de parámetros está validado.
La apertura de una sesión de parametrización se guarda en la memoria permanente de diagnosis.
Durante la sesión de parametrización activa se emite el mensaje “FSPArA” en el visualizador digital de
7 segmentos del controlador de motor (siempre que no haya ningún error), véase � Sección 5.4.2.
Con el botón “Start Identificación” (Iniciar identificación) en el asistente de inicio se puede emitir el
mensaje “HELLO...”. El mensaje sirve para idenfiticar el controlador de motor cuando hay varios
controladores de motor conectados con el PC de parametrización.
En cada momento es posible abrir únicamente una sesión de parametrización por cada módulo de
seguridad.
Si ya hay una sesión de parametrización abierta, el módulo de seguridad rechaza otras demandas
hasta que se cierre la sesión de parametrización actual.
De este modo se evita que un módulo de seguridad se pueda parametrizar simultáneamente con el
SafetyTool a través de varios PCs. El SafetyTool permite una modificación de parámetros solo después
de haber iniciado una sesión de parametrización.
Identificación de usuario y contraseña
Al abrir una sesión de parametrización es necesario introducir una identificación de usuario (nombre de
usuario) y una contraseña.
La identificación de usuario y la contraseña se componen de caracteres ASCII (letras, números y
vocales modificadas, sin caracteres especiales) y tienen una longitud máxima de 8 caracteres.
En estado de entrega y después de reponer los ajustes de fábrica la contraseña es “SAFETY”.
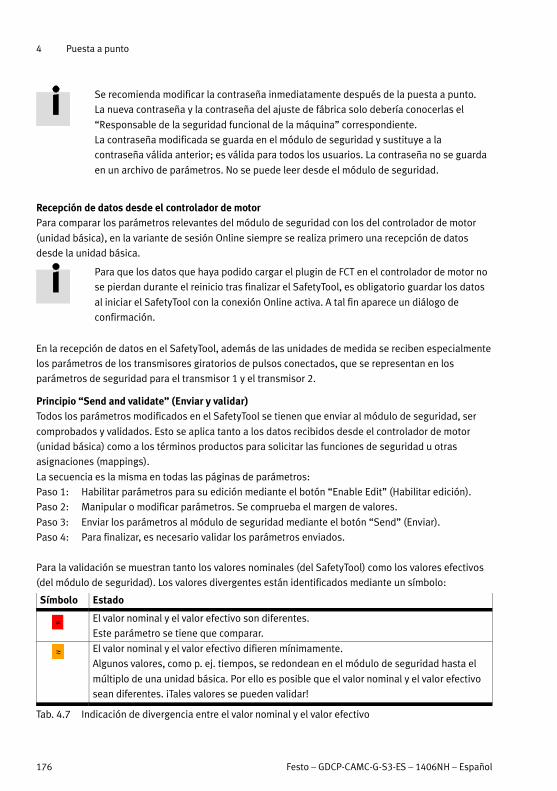
4 Puesta a punto
176 Festo – GDCP-CAMC-G-S3-ES – 1406NH – Español
Se recomienda modificar la contraseña inmediatamente después de la puesta a punto.
La nueva contraseña y la contraseña del ajuste de fábrica solo debería conocerlas el
“Responsable de la seguridad funcional de la máquina” correspondiente.
La contraseña modificada se guarda en el módulo de seguridad y sustituye a la
contraseña válida anterior; es válida para todos los usuarios. La contraseña no se guarda
en un archivo de parámetros. No se puede leer desde el módulo de seguridad.
Recepción de datos desde el controlador de motorPara comparar los parámetros relevantes del módulo de seguridad con los del controlador de motor
(unidad básica), en la variante de sesión Online siempre se realiza primero una recepción de datos
desde la unidad básica.
Para que los datos que haya podido cargar el plugin de FCT en el controlador de motor no
se pierdan durante el reinicio tras finalizar el SafetyTool, es obligatorio guardar los datos
al iniciar el SafetyTool con la conexión Online activa. A tal fin aparece un diálogo de
confirmación.
En la recepción de datos en el SafetyTool, además de las unidades de medida se reciben especialmente
los parámetros de los transmisores giratorios de pulsos conectados, que se representan en los
parámetros de seguridad para el transmisor 1 y el transmisor 2.
Principio “Send and validate” (Enviar y validar)Todos los parámetros modificados en el SafetyTool se tienen que enviar al módulo de seguridad, ser
comprobados y validados. Esto se aplica tanto a los datos recibidos desde el controlador de motor
(unidad básica) como a los términos productos para solicitar las funciones de seguridad u otras
asignaciones (mappings).
La secuencia es la misma en todas las páginas de parámetros:
Paso 1: Habilitar parámetros para su edición mediante el botón “Enable Edit” (Habilitar edición).
Paso 2: Manipular o modificar parámetros. Se comprueba el margen de valores.
Paso 3: Enviar los parámetros al módulo de seguridad mediante el botón “Send” (Enviar).
Paso 4: Para finalizar, es necesario validar los parámetros enviados.
Para la validación se muestran tanto los valores nominales (del SafetyTool) como los valores efectivos
(del módulo de seguridad). Los valores divergentes están identificados mediante un símbolo:
Símbolo Estado
El valor nominal y el valor efectivo son diferentes.
Este parámetro se tiene que comparar.
El valor nominal y el valor efectivo difieren mínimamente.
Algunos valores, como p. ej. tiempos, se redondean en el módulo de seguridad hasta el
múltiplo de una unidad básica. Por ello es posible que el valor nominal y el valor efectivo
sean diferentes. ¡Tales valores se pueden validar!
Tab. 4.7 Indicación de divergencia entre el valor nominal y el valor efectivo
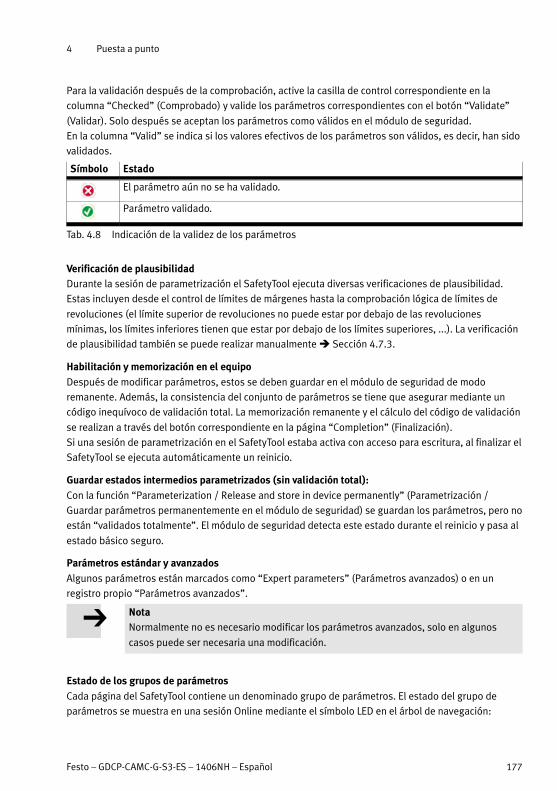
4 Puesta a punto
Festo – GDCP-CAMC-G-S3-ES – 1406NH – Español 177
Para la validación después de la comprobación, active la casilla de control correspondiente en la
columna “Checked” (Comprobado) y valide los parámetros correspondientes con el botón “Validate”
(Validar). Solo después se aceptan los parámetros como válidos en el módulo de seguridad.
En la columna “Valid” se indica si los valores efectivos de los parámetros son válidos, es decir, han sido
validados.
Símbolo Estado
El parámetro aún no se ha validado.
Parámetro validado.
Tab. 4.8 Indicación de la validez de los parámetros
Verificación de plausibilidadDurante la sesión de parametrización el SafetyTool ejecuta diversas verificaciones de plausibilidad.
Estas incluyen desde el control de límites de márgenes hasta la comprobación lógica de límites de
revoluciones (el límite superior de revoluciones no puede estar por debajo de las revoluciones
mínimas, los límites inferiores tienen que estar por debajo de los límites superiores, ...). La verificación
de plausibilidad también se puede realizar manualmente � Sección 4.7.3.
Habilitación y memorización en el equipo
Después de modificar parámetros, estos se deben guardar en el módulo de seguridad de modo
remanente. Además, la consistencia del conjunto de parámetros se tiene que asegurar mediante un
código inequívoco de validación total. La memorización remanente y el cálculo del código de validación
se realizan a través del botón correspondiente en la página “Completion” (Finalización).
Si una sesión de parametrización en el SafetyTool estaba activa con acceso para escritura, al finalizar el
SafetyTool se ejecuta automáticamente un reinicio.
Guardar estados intermedios parametrizados (sin validación total):
Con la función “Parameterization / Release and store in device permanently” (Parametrización /
Guardar parámetros permanentemente en el módulo de seguridad) se guardan los parámetros, pero no
están “validados totalmente”. El módulo de seguridad detecta este estado durante el reinicio y pasa al
estado básico seguro.
Parámetros estándar y avanzados
Algunos parámetros están marcados como “Expert parameters” (Parámetros avanzados) o en un
registro propio “Parámetros avanzados”.
NotaNormalmente no es necesario modificar los parámetros avanzados, solo en algunos
casos puede ser necesaria una modificación.
Estado de los grupos de parámetros
Cada página del SafetyTool contiene un denominado grupo de parámetros. El estado del grupo de
parámetros se muestra en una sesión Online mediante el símbolo LED en el árbol de navegación:
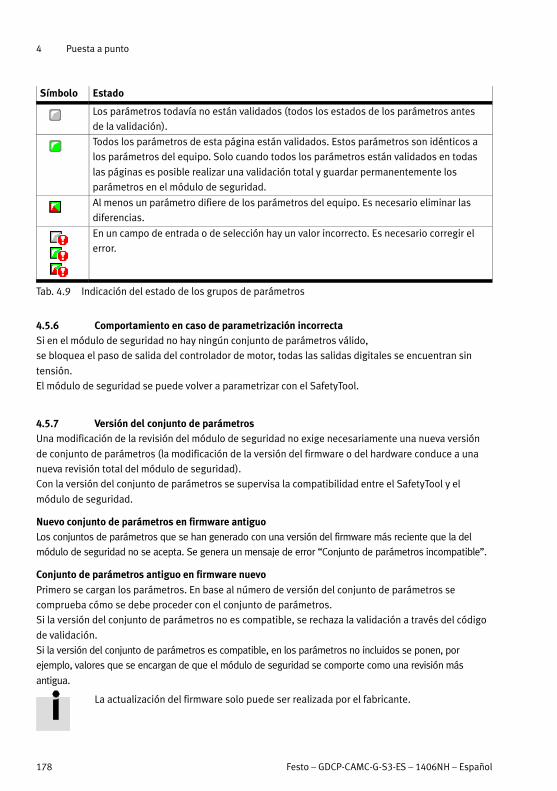
4 Puesta a punto
178 Festo – GDCP-CAMC-G-S3-ES – 1406NH – Español
Símbolo Estado
Los parámetros todavía no están validados (todos los estados de los parámetros antes
de la validación).
Todos los parámetros de esta página están validados. Estos parámetros son idénticos a
los parámetros del equipo. Solo cuando todos los parámetros están validados en todas
las páginas es posible realizar una validación total y guardar permanentemente los
parámetros en el módulo de seguridad.
Al menos un parámetro difiere de los parámetros del equipo. Es necesario eliminar las
diferencias.
En un campo de entrada o de selección hay un valor incorrecto. Es necesario corregir el
error.
Tab. 4.9 Indicación del estado de los grupos de parámetros
4.5.6 Comportamiento en caso de parametrización incorrectaSi en el módulo de seguridad no hay ningún conjunto de parámetros válido,
se bloquea el paso de salida del controlador de motor, todas las salidas digitales se encuentran sin
tensión.
El módulo de seguridad se puede volver a parametrizar con el SafetyTool.
4.5.7 Versión del conjunto de parámetrosUna modificación de la revisión del módulo de seguridad no exige necesariamente una nueva versión
de conjunto de parámetros (la modificación de la versión del firmware o del hardware conduce a una
nueva revisión total del módulo de seguridad).
Con la versión del conjunto de parámetros se supervisa la compatibilidad entre el SafetyTool y el
módulo de seguridad.
Nuevo conjunto de parámetros en firmware antiguoLos conjuntos de parámetros que se han generado con una versión del firmware más reciente que la del
módulo de seguridad no se acepta. Se genera un mensaje de error “Conjunto de parámetros incompatible”.
Conjunto de parámetros antiguo en firmware nuevo
Primero se cargan los parámetros. En base al número de versión del conjunto de parámetros se
comprueba cómo se debe proceder con el conjunto de parámetros.
Si la versión del conjunto de parámetros no es compatible, se rechaza la validación a través del código
de validación.
Si la versión del conjunto de parámetros es compatible, en los parámetros no incluidos se ponen, por
ejemplo, valores que se encargan de que el módulo de seguridad se comporte como una revisión más
antigua.
La actualización del firmware solo puede ser realizada por el fabricante.
4 Puesta a punto
Festo – GDCP-CAMC-G-S3-ES – 1406NH – Español 179
4.6 Secuencia de la parametrización con el SafetyTool (ejemplo)
En esta sección se describe una secuencia completa de parametrización en base a un ejemplo. Lospasos fundamentales son aplicables a cualquier otro caso de aplicación.Para esta secuencia se presupone lo siguiente:– La puesta a punto básica del controlador de motor se ha realizado con el plugin de FCT y existe una
conexión Online activa con el FCT.– El módulo de seguridad se encuentra en estado de entrega o con los ajustes de fábrica (� Sección 4.7.2).
Hallará una descripción completa de la interfaz y las funciones del SafetyTool en la ayuda
del SafetyTool.
Hallará información sobre algunas funciones especiales en � Sección 4.7.
Ejemplo de aplicación:Máquina con1. Interruptor de parada de emergencia (DIN40), que al ser accionado siempre debe disparar la
función SS1 tipo b) y, a continuación, SBC.2. Barrera fotoeléctrica (DIN41) para protección contra manipulaciones de la máquina, en servicio
normal se dispara también SS1, en modo de funcionamiento de ajuste se solicita SS2.3. Tecla de autorización (DIN42) para poder hacer funcionar el eje con SLS en el modo de
funcionamiento de ajuste.4. Selector del modo de funcionamiento para servicio normal y modo de ajuste (DIN45, DIN46).5. Supervisión de los interruptores mediante pulsos de prueba a través de DOUT42.6. Validación de errores (DIN48).7. Flanco ascendente de rearranque (DIN49), el rearranque tras SS1 tiene lugar a través de la señal
externa “Rearranque”.8. La conmutación entre SS2 y SLS tiene lugar con rearranque automático.En el ejemplo se lleva a cabo la siguiente parametrización:– Tras la puesta en marcha:
STO solicitada con activación automática de SBC.– Servicio normal:
Al accionar la parada de emergencia o la entrada en la barrera fotoeléctrica debe activarse SS1 conSBC a continuación, rearranque solamente a través de DIN49.
– Modo de funcionamiento de ajuste:– Al seleccionar el modo de funcionamiento de ajuste se solicita siempre SLS.– Solo se puede finalizar SLS cuando,
a) el selector del modo de funcionamiento vuelve a estar en posición de servicio normal yb) la barrera fotoeléctrica deja de estar interrumpida yc) se acciona el rearranque.
– En caso de entrada en la barrera fotoeléctrica se vuelve a activar adicionalmente SS2.– Rearranque desde SS2 solo a través de DIN49 y cuando se ha salido de la barrera fotoeléctrica,
o mediante la tecla de autorización DIN42.– Al accionar la tecla de autorización debe conmutarse de SS2 a SLS.
El circuito de protección y la parametrización necesarios para su aplicación debe
determinarlos individualmente en el marco de su evaluación de riesgos.
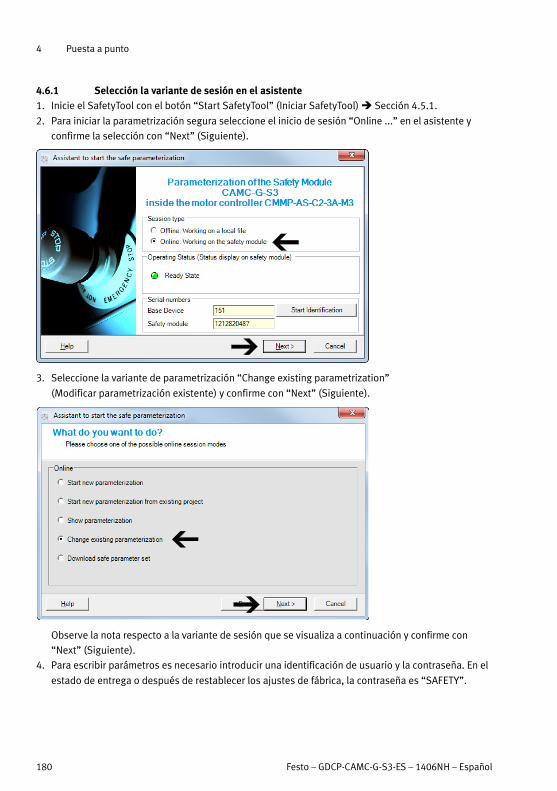
4 Puesta a punto
180 Festo – GDCP-CAMC-G-S3-ES – 1406NH – Español
4.6.1 Selección la variante de sesión en el asistente1. Inicie el SafetyTool con el botón “Start SafetyTool” (Iniciar SafetyTool) � Sección 4.5.1.
2. Para iniciar la parametrización segura seleccione el inicio de sesión “Online ...” en el asistente y
confirme la selección con “Next” (Siguiente).
3. Seleccione la variante de parametrización “Change existing parametrization”
(Modificar parametrización existente) y confirme con “Next” (Siguiente).
Observe la nota respecto a la variante de sesión que se visualiza a continuación y confirme con
“Next” (Siguiente).
4. Para escribir parámetros es necesario introducir una identificación de usuario y la contraseña. En el
estado de entrega o después de restablecer los ajustes de fábrica, la contraseña es “SAFETY”.
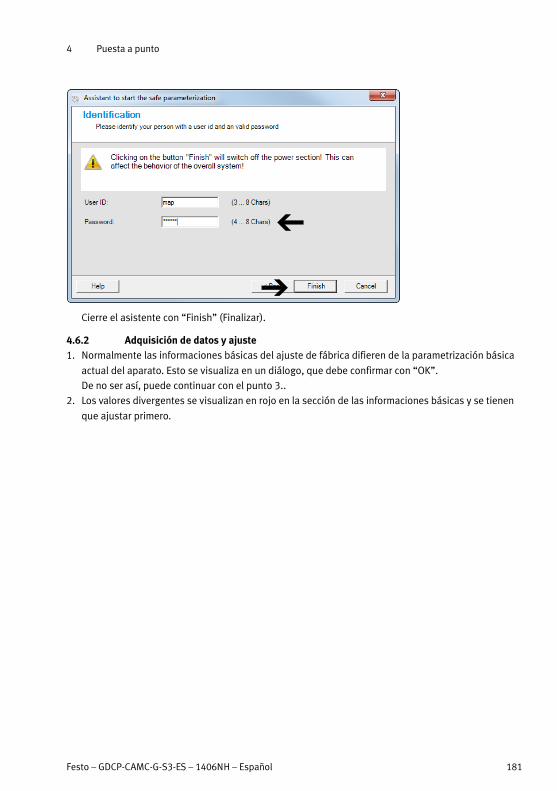
4 Puesta a punto
Festo – GDCP-CAMC-G-S3-ES – 1406NH – Español 181
Cierre el asistente con “Finish” (Finalizar).
4.6.2 Adquisición de datos y ajuste1. Normalmente las informaciones básicas del ajuste de fábrica difieren de la parametrización básica
actual del aparato. Esto se visualiza en un diálogo, que debe confirmar con “OK”.
De no ser así, puede continuar con el punto 3..
2. Los valores divergentes se visualizan en rojo en la sección de las informaciones básicas y se tienen
que ajustar primero.
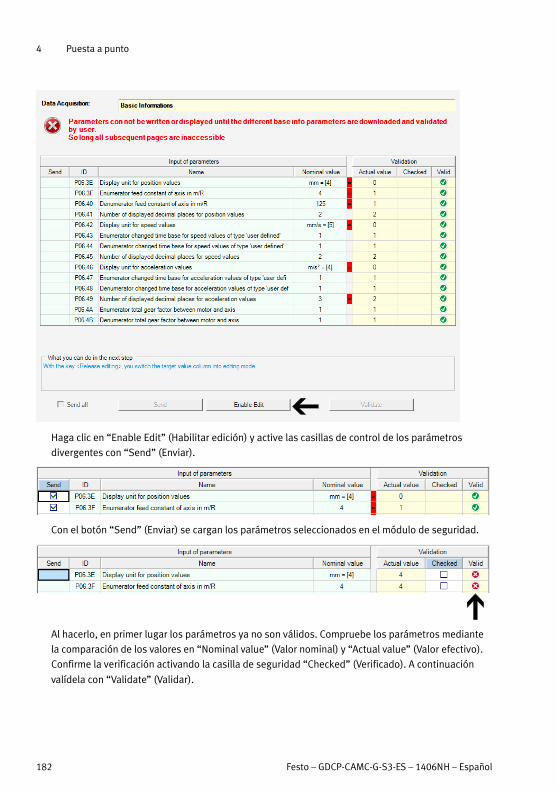
4 Puesta a punto
182 Festo – GDCP-CAMC-G-S3-ES – 1406NH – Español
Haga clic en “Enable Edit” (Habilitar edición) y active las casillas de control de los parámetros
divergentes con “Send” (Enviar).
Con el botón “Send” (Enviar) se cargan los parámetros seleccionados en el módulo de seguridad.
Al hacerlo, en primer lugar los parámetros ya no son válidos. Compruebe los parámetros mediante
la comparación de los valores en “Nominal value” (Valor nominal) y “Actual value” (Valor efectivo).
Confirme la verificación activando la casilla de seguridad “Checked” (Verificado). A continuación
valídela con “Validate” (Validar).
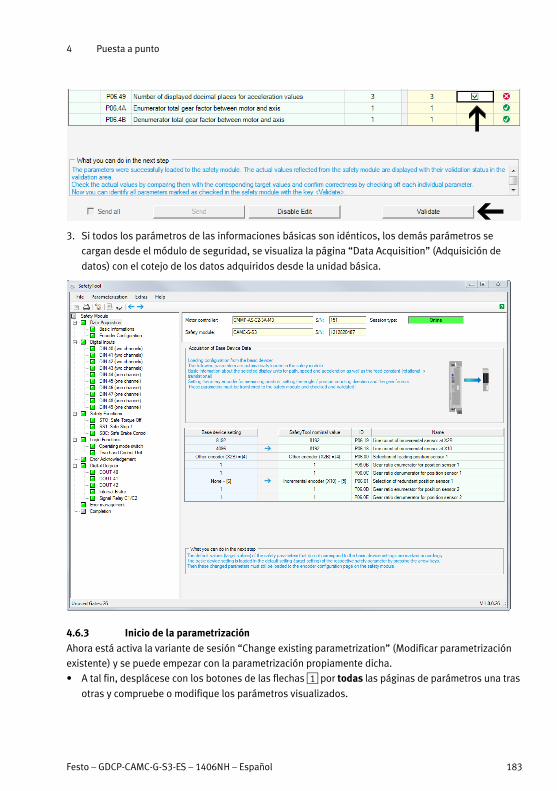
4 Puesta a punto
Festo – GDCP-CAMC-G-S3-ES – 1406NH – Español 183
3. Si todos los parámetros de las informaciones básicas son idénticos, los demás parámetros se
cargan desde el módulo de seguridad, se visualiza la página “Data Acquisition” (Adquisición de
datos) con el cotejo de los datos adquiridos desde la unidad básica.
4.6.3 Inicio de la parametrización
Ahora está activa la variante de sesión “Change existing parametrization” (Modificar parametrización
existente) y se puede empezar con la parametrización propiamente dicha.
� A tal fin, desplácese con los botones de las flechas 1 por todas las páginas de parámetros una tras
otras y compruebe o modifique los parámetros visualizados.
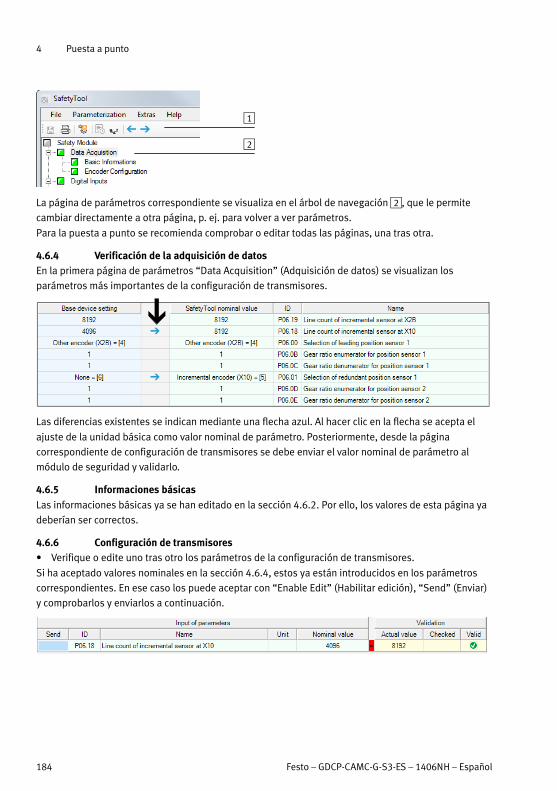
4 Puesta a punto
184 Festo – GDCP-CAMC-G-S3-ES – 1406NH – Español
1
2
La página de parámetros correspondiente se visualiza en el árbol de navegación 2, que le permite
cambiar directamente a otra página, p. ej. para volver a ver parámetros.
Para la puesta a punto se recomienda comprobar o editar todas las páginas, una tras otra.
4.6.4 Verificación de la adquisición de datosEn la primera página de parámetros “Data Acquisition” (Adquisición de datos) se visualizan los
parámetros más importantes de la configuración de transmisores.
Las diferencias existentes se indican mediante una flecha azul. Al hacer clic en la flecha se acepta el
ajuste de la unidad básica como valor nominal de parámetro. Posteriormente, desde la página
correspondiente de configuración de transmisores se debe enviar el valor nominal de parámetro al
módulo de seguridad y validarlo.
4.6.5 Informaciones básicas
Las informaciones básicas ya se han editado en la sección 4.6.2. Por ello, los valores de esta página ya
deberían ser correctos.
4.6.6 Configuración de transmisores� Verifique o edite uno tras otro los parámetros de la configuración de transmisores.
Si ha aceptado valores nominales en la sección 4.6.4, estos ya están introducidos en los parámetros
correspondientes. En ese caso los puede aceptar con “Enable Edit” (Habilitar edición), “Send” (Enviar)
y comprobarlos y enviarlos a continuación.
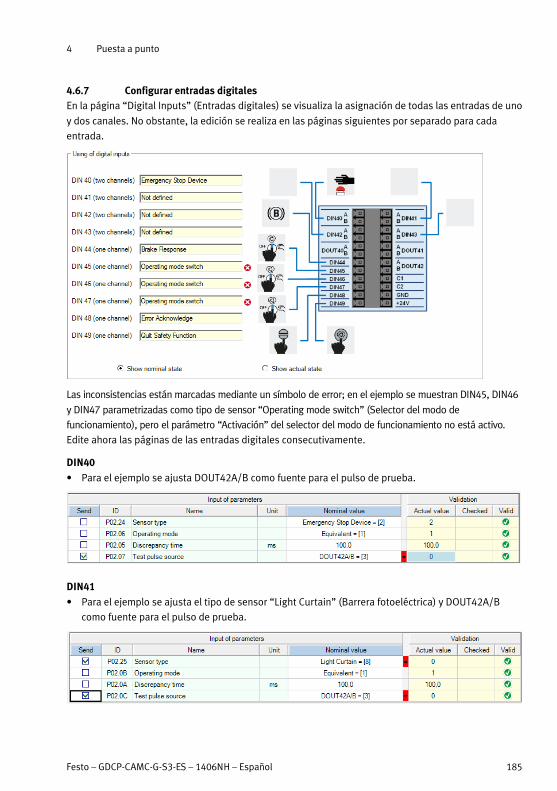
4 Puesta a punto
Festo – GDCP-CAMC-G-S3-ES – 1406NH – Español 185
4.6.7 Configurar entradas digitalesEn la página “Digital Inputs” (Entradas digitales) se visualiza la asignación de todas las entradas de uno
y dos canales. No obstante, la edición se realiza en las páginas siguientes por separado para cada
entrada.
Las inconsistencias están marcadas mediante un símbolo de error; en el ejemplo se muestran DIN45, DIN46
y DIN47 parametrizadas como tipo de sensor “Operating mode switch” (Selector del modo de
funcionamiento), pero el parámetro “Activación” del selector del modo de funcionamiento no está activo.
Edite ahora las páginas de las entradas digitales consecutivamente.
DIN40
� Para el ejemplo se ajusta DOUT42A/B como fuente para el pulso de prueba.
DIN41
� Para el ejemplo se ajusta el tipo de sensor “Light Curtain” (Barrera fotoeléctrica) y DOUT42A/B
como fuente para el pulso de prueba.
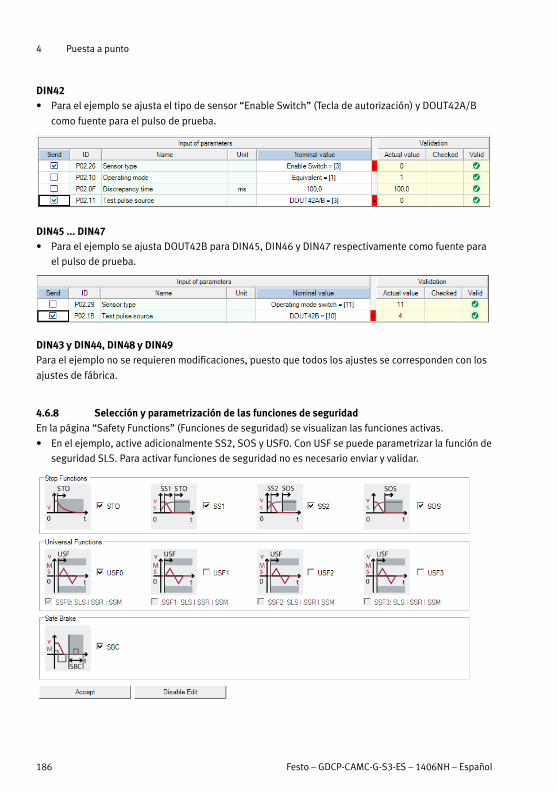
4 Puesta a punto
186 Festo – GDCP-CAMC-G-S3-ES – 1406NH – Español
DIN42� Para el ejemplo se ajusta el tipo de sensor “Enable Switch” (Tecla de autorización) y DOUT42A/B
como fuente para el pulso de prueba.
DIN45 ... DIN47� Para el ejemplo se ajusta DOUT42B para DIN45, DIN46 y DIN47 respectivamente como fuente para
el pulso de prueba.
DIN43 y DIN44, DIN48 y DIN49Para el ejemplo no se requieren modificaciones, puesto que todos los ajustes se corresponden con los
ajustes de fábrica.
4.6.8 Selección y parametrización de las funciones de seguridadEn la página “Safety Functions” (Funciones de seguridad) se visualizan las funciones activas.
� En el ejemplo, active adicionalmente SS2, SOS y USF0. Con USF se puede parametrizar la función de
seguridad SLS. Para activar funciones de seguridad no es necesario enviar y validar.
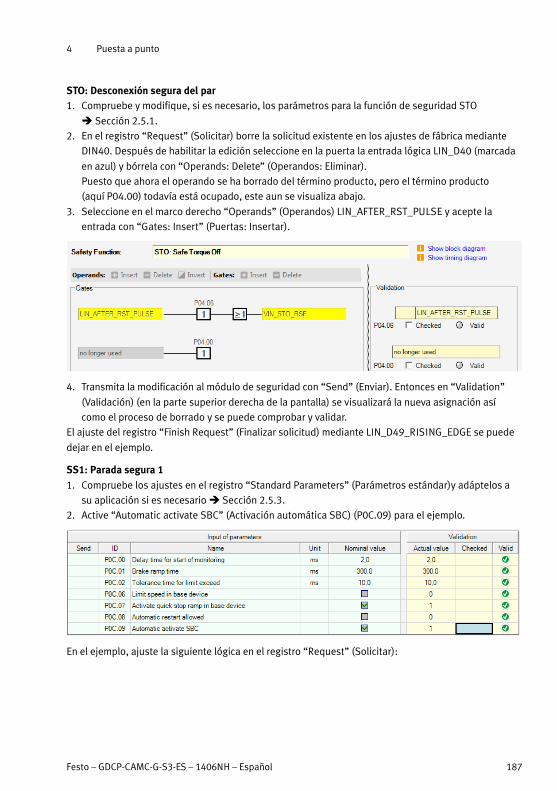
4 Puesta a punto
Festo – GDCP-CAMC-G-S3-ES – 1406NH – Español 187
STO: Desconexión segura del par1. Compruebe y modifique, si es necesario, los parámetros para la función de seguridad STO
� Sección 2.5.1.
2. En el registro “Request” (Solicitar) borre la solicitud existente en los ajustes de fábrica mediante
DIN40. Después de habilitar la edición seleccione en la puerta la entrada lógica LIN_D40 (marcada
en azul) y bórrela con “Operands: Delete” (Operandos: Eliminar).
Puesto que ahora el operando se ha borrado del término producto, pero el término producto
(aquí P04.00) todavía está ocupado, este aun se visualiza abajo.
3. Seleccione en el marco derecho “Operands” (Operandos) LIN_AFTER_RST_PULSE y acepte la
entrada con “Gates: Insert” (Puertas: Insertar).
4. Transmita la modificación al módulo de seguridad con “Send” (Enviar). Entonces en “Validation”
(Validación) (en la parte superior derecha de la pantalla) se visualizará la nueva asignación así
como el proceso de borrado y se puede comprobar y validar.
El ajuste del registro “Finish Request” (Finalizar solicitud) mediante LIN_D49_RISING_EDGE se puede
dejar en el ejemplo.
SS1: Parada segura 1
1. Compruebe los ajustes en el registro “Standard Parameters” (Parámetros estándar)y adáptelos a
su aplicación si es necesario � Sección 2.5.3.
2. Active “Automatic activate SBC” (Activación automática SBC) (P0C.09) para el ejemplo.
En el ejemplo, ajuste la siguiente lógica en el registro “Request” (Solicitar):
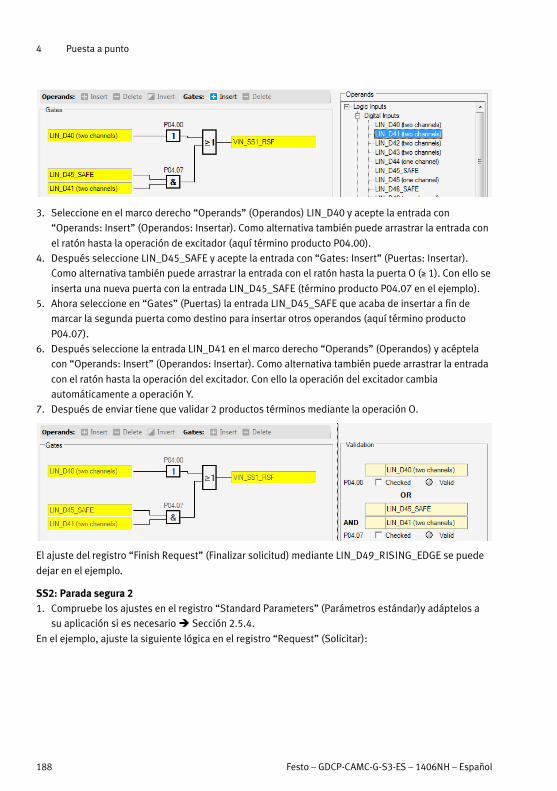
4 Puesta a punto
188 Festo – GDCP-CAMC-G-S3-ES – 1406NH – Español
3. Seleccione en el marco derecho “Operands” (Operandos) LIN_D40 y acepte la entrada con
“Operands: Insert” (Operandos: Insertar). Como alternativa también puede arrastrar la entrada con
el ratón hasta la operación de excitador (aquí término producto P04.00).
4. Después seleccione LIN_D45_SAFE y acepte la entrada con “Gates: Insert” (Puertas: Insertar).
Como alternativa también puede arrastrar la entrada con el ratón hasta la puerta O (≥ 1). Con ello se
inserta una nueva puerta con la entrada LIN_D45_SAFE (término producto P04.07 en el ejemplo).
5. Ahora seleccione en “Gates” (Puertas) la entrada LIN_D45_SAFE que acaba de insertar a fin de
marcar la segunda puerta como destino para insertar otros operandos (aquí término producto
P04.07).
6. Después seleccione la entrada LIN_D41 en el marco derecho “Operands” (Operandos) y acéptela
con “Operands: Insert” (Operandos: Insertar). Como alternativa también puede arrastrar la entrada
con el ratón hasta la operación del excitador. Con ello la operación del excitador cambia
automáticamente a operación Y.
7. Después de enviar tiene que validar 2 productos términos mediante la operación O.
El ajuste del registro “Finish Request” (Finalizar solicitud) mediante LIN_D49_RISING_EDGE se puede
dejar en el ejemplo.
SS2: Parada segura 21. Compruebe los ajustes en el registro “Standard Parameters” (Parámetros estándar)y adáptelos a
su aplicación si es necesario � Sección 2.5.4.
En el ejemplo, ajuste la siguiente lógica en el registro “Request” (Solicitar):
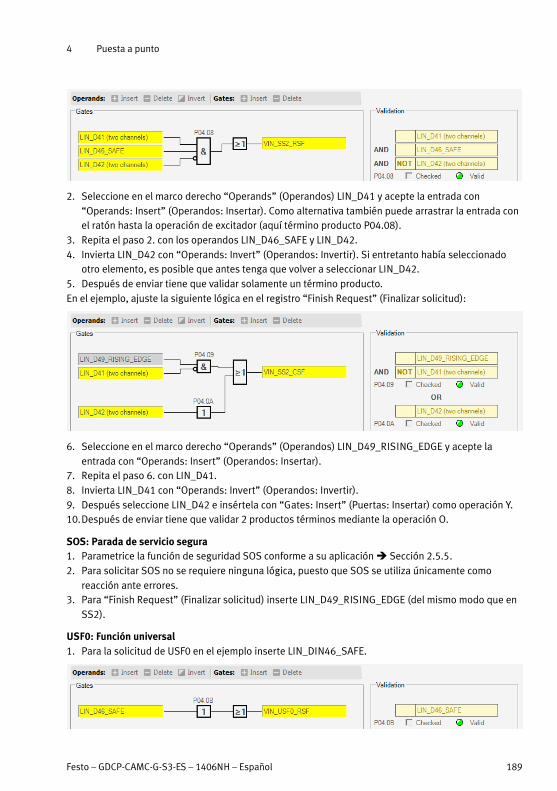
4 Puesta a punto
Festo – GDCP-CAMC-G-S3-ES – 1406NH – Español 189
2. Seleccione en el marco derecho “Operands” (Operandos) LIN_D41 y acepte la entrada con“Operands: Insert” (Operandos: Insertar). Como alternativa también puede arrastrar la entrada conel ratón hasta la operación de excitador (aquí término producto P04.08).
3. Repita el paso 2. con los operandos LIN_D46_SAFE y LIN_D42.4. Invierta LIN_D42 con “Operands: Invert” (Operandos: Invertir). Si entretanto había seleccionado
otro elemento, es posible que antes tenga que volver a seleccionar LIN_D42.5. Después de enviar tiene que validar solamente un término producto.En el ejemplo, ajuste la siguiente lógica en el registro “Finish Request” (Finalizar solicitud):
6. Seleccione en el marco derecho “Operands” (Operandos) LIN_D49_RISING_EDGE y acepte laentrada con “Operands: Insert” (Operandos: Insertar).
7. Repita el paso 6. con LIN_D41.8. Invierta LIN_D41 con “Operands: Invert” (Operandos: Invertir).9. Después seleccione LIN_D42 e insértela con “Gates: Insert” (Puertas: Insertar) como operación Y.10.Después de enviar tiene que validar 2 productos términos mediante la operación O.
SOS: Parada de servicio segura1. Parametrice la función de seguridad SOS conforme a su aplicación � Sección 2.5.5.2. Para solicitar SOS no se requiere ninguna lógica, puesto que SOS se utiliza únicamente como
reacción ante errores.3. Para “Finish Request” (Finalizar solicitud) inserte LIN_D49_RISING_EDGE (del mismo modo que en
SS2).
USF0: Función universal1. Para la solicitud de USF0 en el ejemplo inserte LIN_DIN46_SAFE.
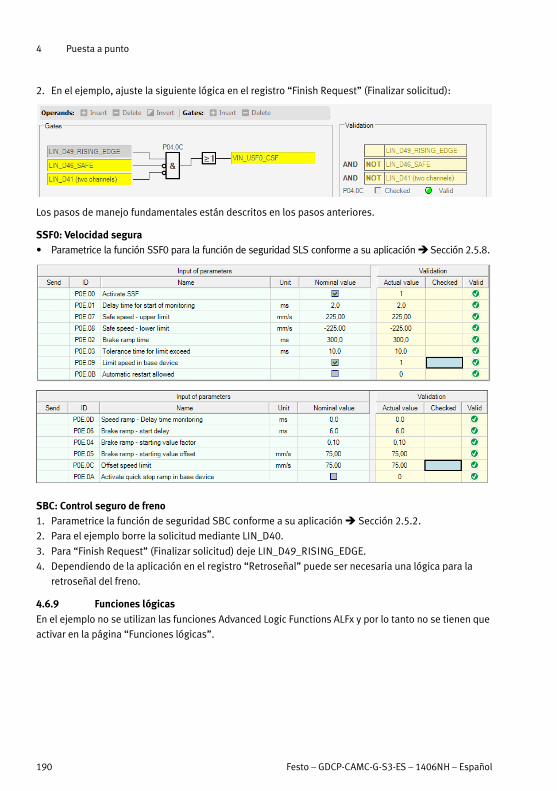
4 Puesta a punto
190 Festo – GDCP-CAMC-G-S3-ES – 1406NH – Español
2. En el ejemplo, ajuste la siguiente lógica en el registro “Finish Request” (Finalizar solicitud):
Los pasos de manejo fundamentales están descritos en los pasos anteriores.
SSF0: Velocidad segura� Parametrice la función SSF0 para la función de seguridad SLS conforme a su aplicación � Sección 2.5.8.
SBC: Control seguro de freno1. Parametrice la función de seguridad SBC conforme a su aplicación � Sección 2.5.2.
2. Para el ejemplo borre la solicitud mediante LIN_D40.
3. Para “Finish Request” (Finalizar solicitud) deje LIN_D49_RISING_EDGE.
4. Dependiendo de la aplicación en el registro “Retroseñal” puede ser necesaria una lógica para la
retroseñal del freno.
4.6.9 Funciones lógicas
En el ejemplo no se utilizan las funciones Advanced Logic Functions ALFx y por lo tanto no se tienen que
activar en la página “Funciones lógicas”.
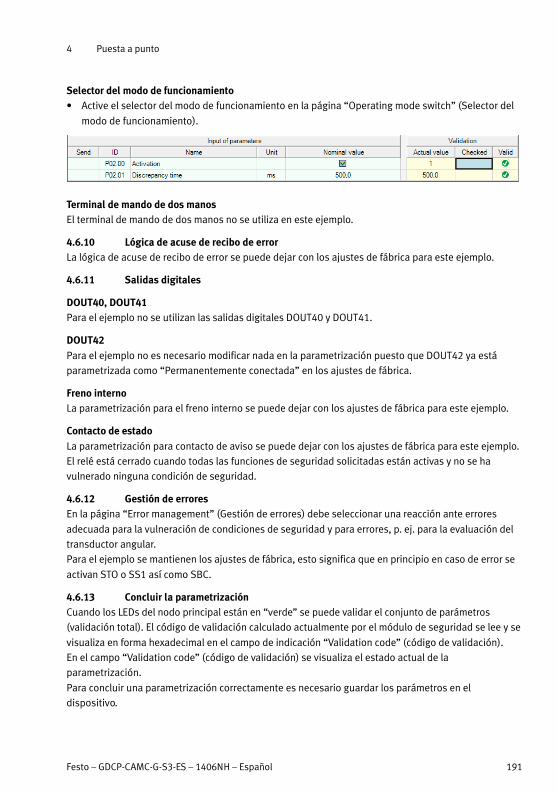
4 Puesta a punto
Festo – GDCP-CAMC-G-S3-ES – 1406NH – Español 191
Selector del modo de funcionamiento� Active el selector del modo de funcionamiento en la página “Operating mode switch” (Selector del
modo de funcionamiento).
Terminal de mando de dos manosEl terminal de mando de dos manos no se utiliza en este ejemplo.
4.6.10 Lógica de acuse de recibo de errorLa lógica de acuse de recibo de error se puede dejar con los ajustes de fábrica para este ejemplo.
4.6.11 Salidas digitales
DOUT40, DOUT41Para el ejemplo no se utilizan las salidas digitales DOUT40 y DOUT41.
DOUT42
Para el ejemplo no es necesario modificar nada en la parametrización puesto que DOUT42 ya está
parametrizada como “Permanentemente conectada” en los ajustes de fábrica.
Freno internoLa parametrización para el freno interno se puede dejar con los ajustes de fábrica para este ejemplo.
Contacto de estado
La parametrización para contacto de aviso se puede dejar con los ajustes de fábrica para este ejemplo.
El relé está cerrado cuando todas las funciones de seguridad solicitadas están activas y no se ha
vulnerado ninguna condición de seguridad.
4.6.12 Gestión de erroresEn la página “Error management” (Gestión de errores) debe seleccionar una reacción ante errores
adecuada para la vulneración de condiciones de seguridad y para errores, p. ej. para la evaluación del
transductor angular.
Para el ejemplo se mantienen los ajustes de fábrica, esto significa que en principio en caso de error se
activan STO o SS1 así como SBC.
4.6.13 Concluir la parametrizaciónCuando los LEDs del nodo principal están en “verde” se puede validar el conjunto de parámetros
(validación total). El código de validación calculado actualmente por el módulo de seguridad se lee y se
visualiza en forma hexadecimal en el campo de indicación “Validation code” (código de validación).
En el campo “Validation code” (código de validación) se visualiza el estado actual de la
parametrización.
Para concluir una parametrización correctamente es necesario guardar los parámetros en el
dispositivo.
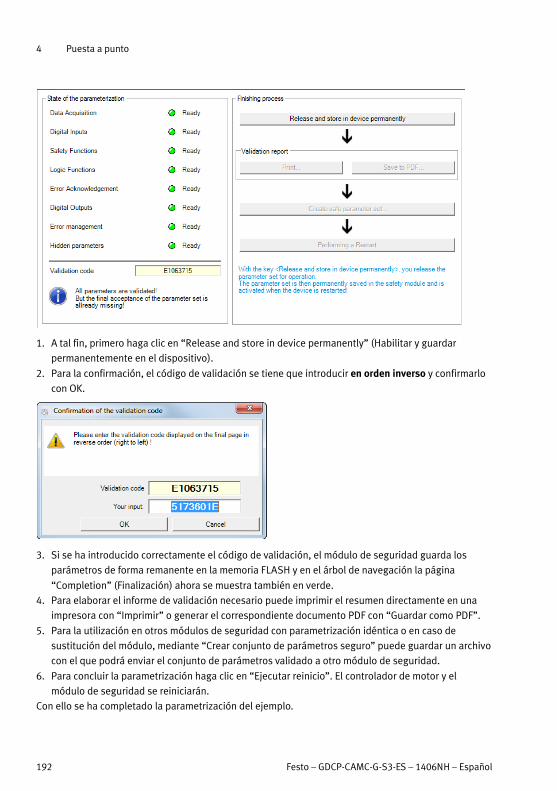
4 Puesta a punto
192 Festo – GDCP-CAMC-G-S3-ES – 1406NH – Español
1. A tal fin, primero haga clic en “Release and store in device permanently” (Habilitar y guardar
permanentemente en el dispositivo).
2. Para la confirmación, el código de validación se tiene que introducir en orden inverso y confirmarlo
con OK.
3. Si se ha introducido correctamente el código de validación, el módulo de seguridad guarda los
parámetros de forma remanente en la memoria FLASH y en el árbol de navegación la página
“Completion” (Finalización) ahora se muestra también en verde.
4. Para elaborar el informe de validación necesario puede imprimir el resumen directamente en una
impresora con “Imprimir” o generar el correspondiente documento PDF con “Guardar como PDF”.
5. Para la utilización en otros módulos de seguridad con parametrización idéntica o en caso de
sustitución del módulo, mediante “Crear conjunto de parámetros seguro” puede guardar un archivo
con el que podrá enviar el conjunto de parámetros validado a otro módulo de seguridad.
6. Para concluir la parametrización haga clic en “Ejecutar reinicio”. El controlador de motor y el
módulo de seguridad se reiniciarán.
Con ello se ha completado la parametrización del ejemplo.
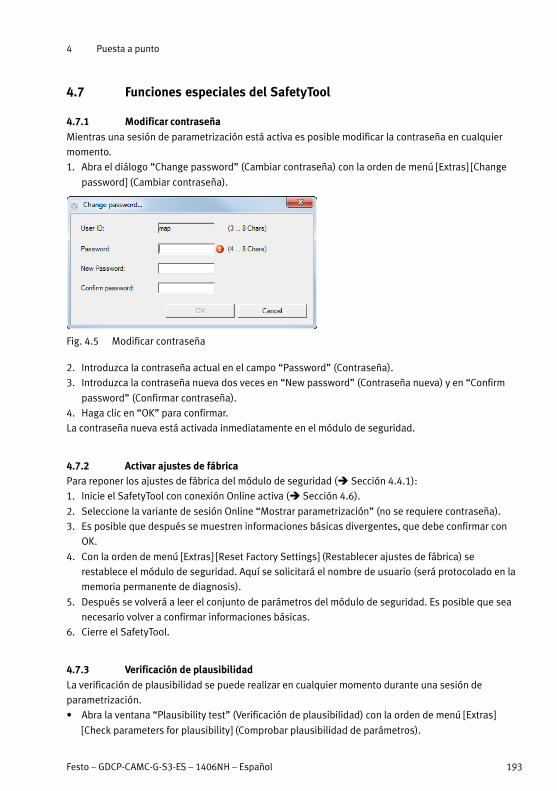
4 Puesta a punto
Festo – GDCP-CAMC-G-S3-ES – 1406NH – Español 193
4.7 Funciones especiales del SafetyTool
4.7.1 Modificar contraseña
Mientras una sesión de parametrización está activa es posible modificar la contraseña en cualquier
momento.
1. Abra el diálogo “Change password” (Cambiar contraseña) con la orden de menú [Extras] [Change
password] (Cambiar contraseña).
Fig. 4.5 Modificar contraseña
2. Introduzca la contraseña actual en el campo “Password” (Contraseña).
3. Introduzca la contraseña nueva dos veces en “New password” (Contraseña nueva) y en “Confirm
password” (Confirmar contraseña).
4. Haga clic en “OK” para confirmar.
La contraseña nueva está activada inmediatamente en el módulo de seguridad.
4.7.2 Activar ajustes de fábricaPara reponer los ajustes de fábrica del módulo de seguridad (� Sección 4.4.1):
1. Inicie el SafetyTool con conexión Online activa (� Sección 4.6).
2. Seleccione la variante de sesión Online “Mostrar parametrización” (no se requiere contraseña).
3. Es posible que después se muestren informaciones básicas divergentes, que debe confirmar con
OK.
4. Con la orden de menú [Extras] [Reset Factory Settings] (Restablecer ajustes de fábrica) se
restablece el módulo de seguridad. Aquí se solicitará el nombre de usuario (será protocolado en la
memoria permanente de diagnosis).
5. Después se volverá a leer el conjunto de parámetros del módulo de seguridad. Es posible que sea
necesario volver a confirmar informaciones básicas.
6. Cierre el SafetyTool.
4.7.3 Verificación de plausibilidad
La verificación de plausibilidad se puede realizar en cualquier momento durante una sesión de
parametrización.
� Abra la ventana “Plausibility test” (Verificación de plausibilidad) con la orden de menú [Extras]
[Check parameters for plausibility] (Comprobar plausibilidad de parámetros).
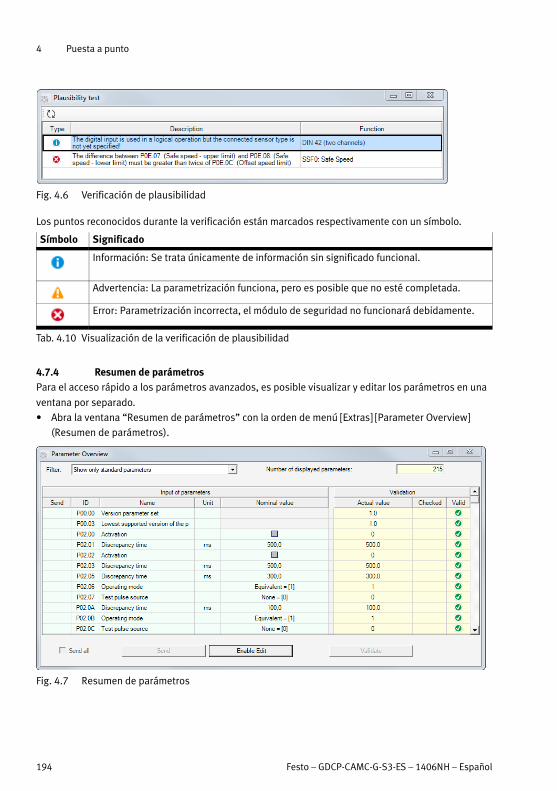
4 Puesta a punto
194 Festo – GDCP-CAMC-G-S3-ES – 1406NH – Español
Fig. 4.6 Verificación de plausibilidad
Los puntos reconocidos durante la verificación están marcados respectivamente con un símbolo.
Símbolo Significado
Información: Se trata únicamente de información sin significado funcional.
Advertencia: La parametrización funciona, pero es posible que no esté completada.
Error: Parametrización incorrecta, el módulo de seguridad no funcionará debidamente.
Tab. 4.10 Visualización de la verificación de plausibilidad
4.7.4 Resumen de parámetrosPara el acceso rápido a los parámetros avanzados, es posible visualizar y editar los parámetros en una
ventana por separado.
� Abra la ventana “Resumen de parámetros” con la orden de menú [Extras] [Parameter Overview]
(Resumen de parámetros).
Fig. 4.7 Resumen de parámetros
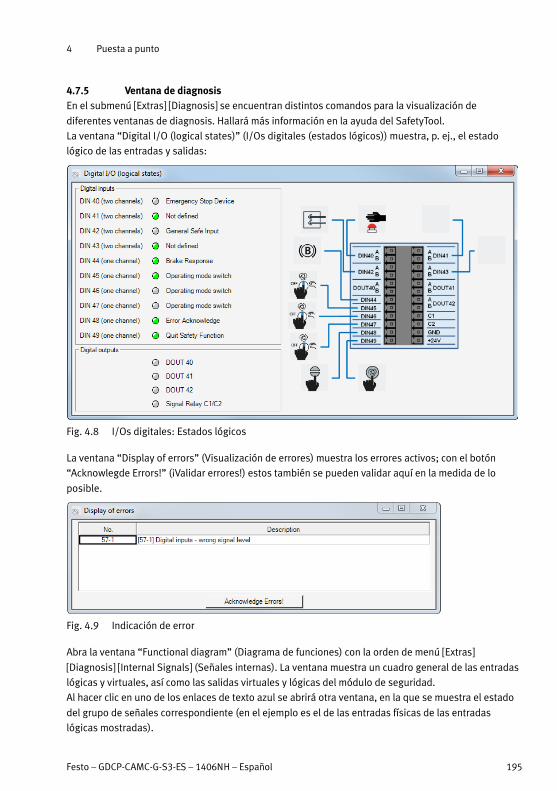
4 Puesta a punto
Festo – GDCP-CAMC-G-S3-ES – 1406NH – Español 195
4.7.5 Ventana de diagnosisEn el submenú [Extras] [Diagnosis] se encuentran distintos comandos para la visualización de
diferentes ventanas de diagnosis. Hallará más información en la ayuda del SafetyTool.
La ventana “Digital I/O (logical states)” (I/Os digitales (estados lógicos)) muestra, p. ej., el estado
lógico de las entradas y salidas:
Fig. 4.8 I/Os digitales: Estados lógicos
La ventana “Display of errors” (Visualización de errores) muestra los errores activos; con el botón
“Acknowlegde Errors!” (¡Validar errores!) estos también se pueden validar aquí en la medida de lo
posible.
Fig. 4.9 Indicación de error
Abra la ventana “Functional diagram” (Diagrama de funciones) con la orden de menú [Extras]
[Diagnosis] [Internal Signals] (Señales internas). La ventana muestra un cuadro general de las entradas
lógicas y virtuales, así como las salidas virtuales y lógicas del módulo de seguridad.
Al hacer clic en uno de los enlaces de texto azul se abrirá otra ventana, en la que se muestra el estado
del grupo de señales correspondiente (en el ejemplo es el de las entradas físicas de las entradas
lógicas mostradas).
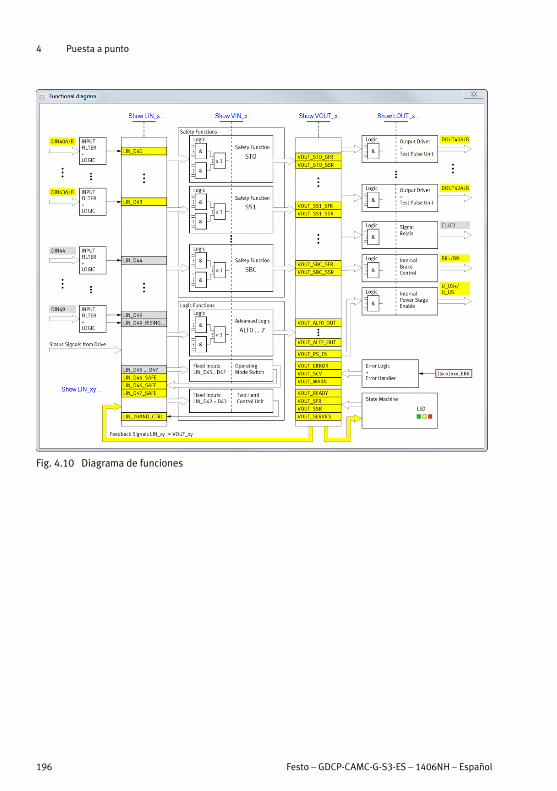
4 Puesta a punto
196 Festo – GDCP-CAMC-G-S3-ES – 1406NH – Español
Fig. 4.10 Diagrama de funciones
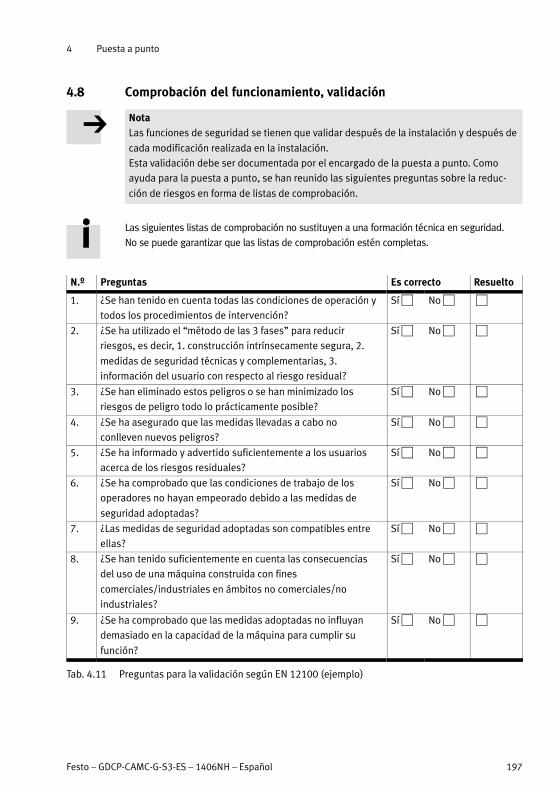
4 Puesta a punto
Festo – GDCP-CAMC-G-S3-ES – 1406NH – Español 197
4.8 Comprobación del funcionamiento, validación
NotaLas funciones de seguridad se tienen que validar después de la instalación y después de
cada modificación realizada en la instalación.
Esta validación debe ser documentada por el encargado de la puesta a punto. Como
ayuda para la puesta a punto, se han reunido las siguientes preguntas sobre la reduc
ción de riesgos en forma de listas de comprobación.
Las siguientes listas de comprobación no sustituyen a una formación técnica en seguridad.
No se puede garantizar que las listas de comprobación estén completas.
N.º Preguntas Es correcto Resuelto
1. ¿Se han tenido en cuenta todas las condiciones de operación y
todos los procedimientos de intervención?
Sí 0 No 0 0
2. ¿Se ha utilizado el “método de las 3 fases” para reducir
riesgos, es decir, 1. construcción intrínsecamente segura, 2.
medidas de seguridad técnicas y complementarias, 3.
información del usuario con respecto al riesgo residual?
Sí 0 No 0 0
3. ¿Se han eliminado estos peligros o se han minimizado los
riesgos de peligro todo lo prácticamente posible?
Sí 0 No 0 0
4. ¿Se ha asegurado que las medidas llevadas a cabo no
conlleven nuevos peligros?
Sí 0 No 0 0
5. ¿Se ha informado y advertido suficientemente a los usuarios
acerca de los riesgos residuales?
Sí 0 No 0 0
6. ¿Se ha comprobado que las condiciones de trabajo de los
operadores no hayan empeorado debido a las medidas de
seguridad adoptadas?
Sí 0 No 0 0
7. ¿Las medidas de seguridad adoptadas son compatibles entre
ellas?
Sí 0 No 0 0
8. ¿Se han tenido suficientemente en cuenta las consecuencias
del uso de una máquina construida con fines
comerciales/industriales en ámbitos no comerciales/no
industriales?
Sí 0 No 0 0
9. ¿Se ha comprobado que las medidas adoptadas no influyan
demasiado en la capacidad de la máquina para cumplir su
función?
Sí 0 No 0 0
Tab. 4.11 Preguntas para la validación según EN 12100 (ejemplo)
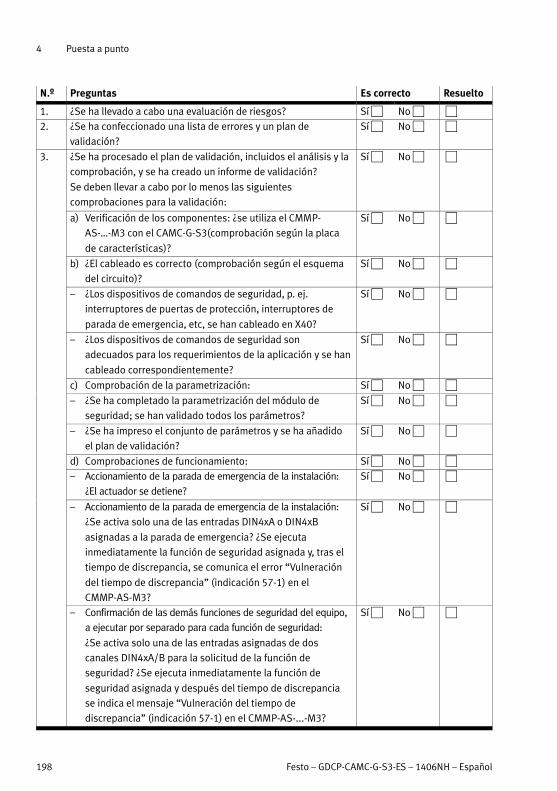
4 Puesta a punto
198 Festo – GDCP-CAMC-G-S3-ES – 1406NH – Español
N.º Preguntas Es correcto Resuelto
1. ¿Se ha llevado a cabo una evaluación de riesgos? Sí 0 No 0 0
2. ¿Se ha confeccionado una lista de errores y un plan de
validación?
Sí 0 No 0 0
3. ¿Se ha procesado el plan de validación, incluidos el análisis y la
comprobación, y se ha creado un informe de validación?
Se deben llevar a cabo por lo menos las siguientes
comprobaciones para la validación:
Sí 0 No 0 0
a) Verificación de los componentes: ¿se utiliza el CMMP-
AS-…-M3 con el CAMC-G-S3(comprobación según la placa
de características)?
Sí 0 No 0 0
b) ¿El cableado es correcto (comprobación según el esquema
del circuito)?
Sí 0 No 0 0
– ¿Los dispositivos de comandos de seguridad, p. ej.
interruptores de puertas de protección, interruptores de
parada de emergencia, etc, se han cableado en X40?
Sí 0 No 0 0
– ¿Los dispositivos de comandos de seguridad son
adecuados para los requerimientos de la aplicación y se han
cableado correspondientemente?
Sí 0 No 0 0
c) Comprobación de la parametrización: Sí 0 No 0 0
– ¿Se ha completado la parametrización del módulo de
seguridad; se han validado todos los parámetros?
Sí 0 No 0 0
– ¿Se ha impreso el conjunto de parámetros y se ha añadido
el plan de validación?
Sí 0 No 0 0
d) Comprobaciones de funcionamiento: Sí 0 No 0 0
– Accionamiento de la parada de emergencia de la instalación:
¿El actuador se detiene?
Sí 0 No 0 0
– Accionamiento de la parada de emergencia de la instalación:
¿Se activa solo una de las entradas DIN4xA o DIN4xB
asignadas a la parada de emergencia? ¿Se ejecuta
inmediatamente la función de seguridad asignada y, tras el
tiempo de discrepancia, se comunica el error “Vulneración
del tiempo de discrepancia” (indicación 57-1) en el
CMMP-AS-M3?
Sí 0 No 0 0
– Confirmación de las demás funciones de seguridad del equipo,
a ejecutar por separado para cada función de seguridad:
¿Se activa solo una de las entradas asignadas de dos
canales DIN4xA/B para la solicitud de la función de
seguridad? ¿Se ejecuta inmediatamente la función de
seguridad asignada y después del tiempo de discrepancia
se indica el mensaje “Vulneración del tiempo de
discrepancia” (indicación 57-1) en el CMMP-AS-...-M3?
Sí 0 No 0 0
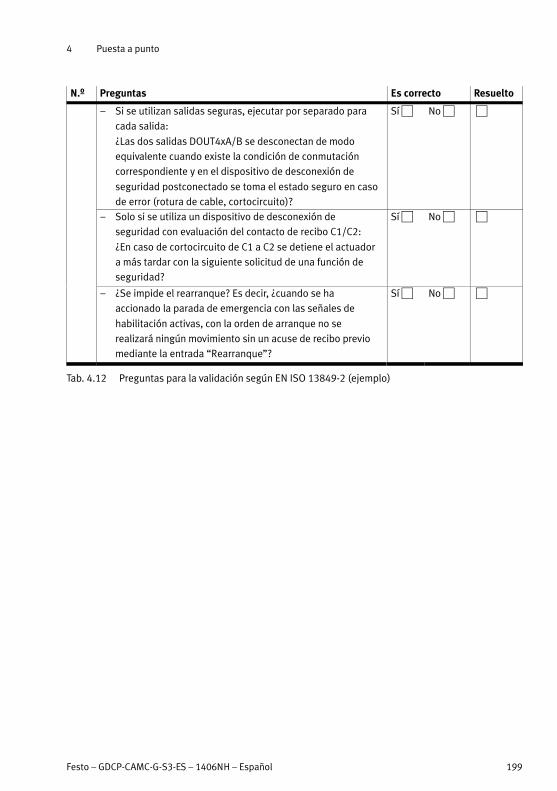
4 Puesta a punto
Festo – GDCP-CAMC-G-S3-ES – 1406NH – Español 199
N.º ResueltoEs correctoPreguntas
– Si se utilizan salidas seguras, ejecutar por separado para
cada salida:
¿Las dos salidas DOUT4xA/B se desconectan de modo
equivalente cuando existe la condición de conmutación
correspondiente y en el dispositivo de desconexión de
seguridad postconectado se toma el estado seguro en caso
de error (rotura de cable, cortocircuito)?
Sí 0 No 0 0
– Solo si se utiliza un dispositivo de desconexión de
seguridad con evaluación del contacto de recibo C1/C2:
¿En caso de cortocircuito de C1 a C2 se detiene el actuador
a más tardar con la siguiente solicitud de una función de
seguridad?
Sí 0 No 0 0
– ¿Se impide el rearranque? Es decir, ¿cuando se ha
accionado la parada de emergencia con las señales de
habilitación activas, con la orden de arranque no se
realizará ningún movimiento sin un acuse de recibo previo
mediante la entrada “Rearranque”?
Sí 0 No 0 0
Tab. 4.12 Preguntas para la validación según EN ISO 13849-2 (ejemplo)
5 Manejo y funcionamiento
200 Festo – GDCP-CAMC-G-S3-ES – 1406NH – Español
5 Manejo y funcionamiento
5.1 Obligaciones de la empresa explotadora
Se debe comprobar la fiabilidad funcional del módulo de seguridad CAMC-G-S3en intervalos apropiados.
Es responsabilidad de la empresa explotadora elegir el tipo de comprobación y los intervalos en el periodo
de tiempo mencionado. La comprobación se debe realizar de manera que se acredite el funcionamiento
correcto del dispositivo de seguridad combinado con el resto de los componentes.
Intervalo de verificación (Proof Test Interval) � Apéndice A, Tab. A.1.
Advertencia¡Peligro debido a merma de la función de seguridad!
Las funciones de seguridad no están garantizadas en caso de un fallo de tensión
(excepción: Desconexión segura del par, STO, control seguro de freno, SBC).
La ausencia de función de seguridad puede causar daños graves irreversibles, p. ej.
debido a movimientos inesperados del sistema de actuadores conectado.
� Asegúrese de que, conforme a su aplicación, haya una fuente de alimentación
segura o disponga las medidas correspondientes.
5.2 Cuidados y mantenimiento
El módulo de seguridad no requiere mantenimiento.
5.3 Funciones de protección
5.3.1 Alimentación, protección contra sobretensión e inversión de polaridad, supervisión detensión
La alimentación de 24 V tiene lugar a través de la unidad básica. El módulo de seguridad supervisa el
margen permitido de la tensión de funcionamiento.
La alimentación del módulo de seguridad está protegida además especialmente contra
– Sobrecarga conforme a EN 61326-3-1.
– Aumento de la alimentación de 24 V en caso de error hasta a 60 V (especificación de alimentación PELV).
La unidad básica proporciona protección contra inversión de polaridad.
5.3.2 Alimentación para la electrónica internaLas tensiones de funcionamiento internas se generan desde la alimentación de 24 V.
Las tensiones internas de alimentación de la electrónica están ejecutadas de manera redundante.
Los dos microcontroladores del módulo de seguridad son alimentados por lo tanto de forma
independiente.
Estos supervisan todas las tensiones de funcionamiento internas de forma alterna.
5 Manejo y funcionamiento
Festo – GDCP-CAMC-G-S3-ES – 1406NH – Español 201
5.3.3 Alimentación FailsafeEl elemento principal del control de las salidas es la denominada “alimentación Failsafe”. Cada
microcontrolador genera, a través de una señal dinámica, una alimentación auxiliar propia (interna)
(U_FS1, U_FS2) para el accionamiento de las distintas salidas (seguras) para
– la alimentación para el accionamiento del controlador, separada para conmutador superior y
conmutador inferior,
– el control de freno, separado para disyuntores BR+ y BR-,
– las salidas digitales DOUT40 – DOUT42, por separado para Pin A y Pin B.
La U_FS1 actúa sobre las salidas que son controladas por el microcontrolador2; U_FS2 actúa sobre las
salidas del microcontrolador1. De este modo se garantiza que en caso de error cada microcontrolador
pueda desconectar las salidas del otro microcontrolador respectivamente.
En caso de avería de un microcontrolador (independientemente de la causa: fallo del hardware, caída
del programa, etc.) la alimentación “Failsafe” correspondiente falla totalmente y se desconectan las
salidas.
5.3.4 Funciones de protección para las salidas digitalesLas salidas digitales están protegidas contra:
– cortocircuito hacia 0 V y 24 V y PE
– circuitos cruzados indistintos con otras salidas
– aumento de tensión hasta 60 V
Las salidas activas se supervisan durante el funcionamiento mediante pulsos de prueba.
En caso de fallo se desconectan las salidas, también todas a la vez.
5.3.5 Funciones de protección para las entradas digitalesLas entradas digitales están protegidas contra:
– cortocircuito hacia 0 V y 24 V y PE
– circuitos cruzados indistintos con otras salidas
– fallos de sobrecarga
– aumento de tensión hasta 60 V
Las entradas se supervisan durante el funcionamiento mediante pulsos de prueba internos.
La supervisión de los sensores pasivos conectados tiene lugar a través de pulsos de prueba externos a
través de DOUT4x.
En entradas de varios canales se realiza una verificación de plausibilidad de conexión simultánea con
supervisión de tiempo de discrepancia.
5.3.6 Funciones de protección para el control de freno
Las salidas para el control de freno están protegidas contra:
– cortocircuito hacia 0 V y 24 V y PE
– circuitos cruzados indistintos con otras salidas
– aumento de tensión hasta 60 V
Las salidas se supervisan durante el funcionamiento mediante pulsos de prueba.
En caso de fallo se desconectan las salidas.
5 Manejo y funcionamiento
202 Festo – GDCP-CAMC-G-S3-ES – 1406NH – Español
5.3.7 Funciones de protección de la alimentación para el accionamiento del controladorLas salidas para el accionamiento del controlador están protegidas contra:
– cortocircuito hacia 0 V y 5 V así como tensión ajena hasta 60 V
– circuitos cruzados entre las dos alimentaciones
– aumento de tensión hasta 60 V
Las salidas se supervisan durante el funcionamiento mediante pulsos de prueba.
En caso de fallo se desconectan las salidas.
5.3.8 Funciones de protección para los sensores de posición conectados
La función de los sensores de posición se supervisa continuamente durante el funcionamiento.
La extensión de la supervisión depende del tipo de transmisor utilizado, p. ej.:
– Supervisión las señales de pista analógicas, amplitudes y supervisión de longitud de vectores en
transmisores SEN/COS e Hiperface así como resolvedores
– Supervisión de la comunicación en transmisores puramente seriales
– Adicionalmente verificación de plausibilidad de los datos de posición mediante supervisión de
aceleración
– Comparación de los datos de posición y velocidad del sensor de posición 1 con los del sensor de
posición 2 en comparación cruzada entre los microcontroladores
– Supervisión de tiempo en caso de parada y función de seguridad solicitada para sensores de
posición sin dinamización forzada (supervisión de 24 h).
5.3.9 Funciones internas de protección de la electrónica en el módulo de seguridadEl módulo de seguridad dispone de otras numerosas funciones internas de control que son ejecutadas
por los microcontroladores internos recíprocamente:
– Dinamización de muchas señales internas analógicas mediante pulsos de prueba
– Control propio de los microcontroladores durante el funcionamiento mediante pruebas de
memorización, pruebas de codificación OP, supervisión de Stack y de ejecución del programa
– Comparación cruzada de la ejecución correcta del programa y del procesamiento del programa
entre el microcontrolador1 y el microcontrolador2
– Comparación cruzada de todos los estados operativos importantes y de las magnitudes de estado
importantes entre el microcontrolador1 y el microcontrolador2
– Supervisión de las condiciones ambientales (temperatura)
– Supervisión de las interfaces de comunicación internas
– Supervisión de la comunicación hacia el exterior
– Supervisión de la integridad de datos de los conjuntos de parámetros seguros
– Supervisión de los estados operativos y cambios
– Supervisión de la sesión de parametrización (sesión, contraseña, control de nivel superior, ...)
– Supervisión del estado de error
5 Manejo y funcionamiento
Festo – GDCP-CAMC-G-S3-ES – 1406NH – Español 203
5.3.10 Supervisión del cumplimiento las funciones de seguridad solicitadasTodas las funciones de seguridad y funciones lógicas solicitadas se supervisan permanentemente en el
módulo de seguridad. En caso de vulneración del límite de seguridad se genera el error
correspondiente. La supervisión abarca fundamentalmente:
– cumplimiento de los límites de velocidad establecidos
– cumplimiento de los límites de posición establecidos
– supervisión de parada
– cumplimiento de las condiciones de tiempo requeridas
– Supervisión de las señales de confirmación (existencia, respuesta en función del tiempo)
– supervisión de 24 h (en caso de parada de servicio segura SOS y control seguro de freno SBC)
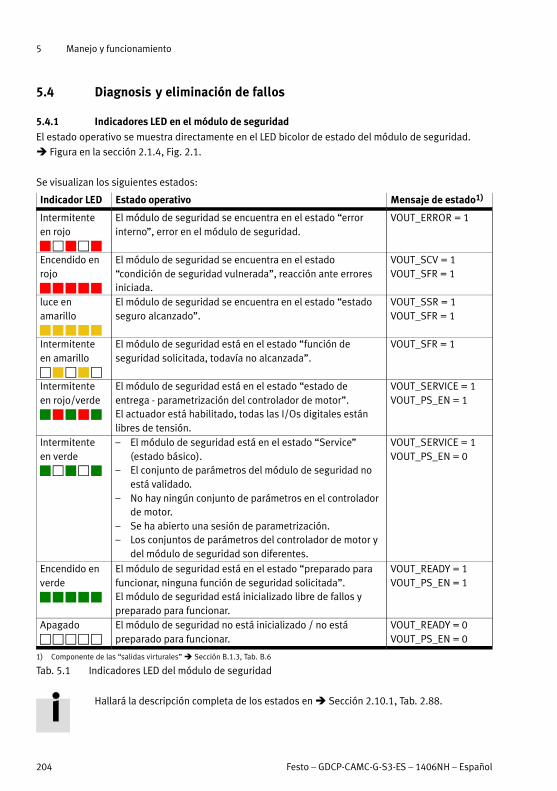
5 Manejo y funcionamiento
204 Festo – GDCP-CAMC-G-S3-ES – 1406NH – Español
5.4 Diagnosis y eliminación de fallos
5.4.1 Indicadores LED en el módulo de seguridad
El estado operativo se muestra directamente en el LED bicolor de estado del módulo de seguridad.
� Figura en la sección 2.1.4, Fig. 2.1.
Se visualizan los siguientes estados:
Indicador LED Estado operativo Mensaje de estado1)
Intermitenteen rojo
El módulo de seguridad se encuentra en el estado “errorinterno”, error en el módulo de seguridad.
VOUT_ERROR = 1
� � � � �Encendido enrojo
El módulo de seguridad se encuentra en el estado“condición de seguridad vulnerada”, reacción ante erroresiniciada.
VOUT_SCV = 1VOUT_SFR = 1
� � � � �luce enamarillo
El módulo de seguridad se encuentra en el estado “estadoseguro alcanzado”.
VOUT_SSR = 1VOUT_SFR = 1
� � � � �Intermitenteen amarillo
El módulo de seguridad está en el estado “función deseguridad solicitada, todavía no alcanzada”.
VOUT_SFR = 1
� � � � �Intermitenteen rojo/verde
El módulo de seguridad está en el estado “estado deentrega - parametrización del controlador de motor”.El actuador está habilitado, todas las I/Os digitales estánlibres de tensión.
VOUT_SERVICE = 1VOUT_PS_EN = 1
� � � � �
Intermitenteen verde
– El módulo de seguridad está en el estado “Service”(estado básico).
– El conjunto de parámetros del módulo de seguridad noestá validado.
– No hay ningún conjunto de parámetros en el controladorde motor.
– Se ha abierto una sesión de parametrización.– Los conjuntos de parámetros del controlador de motor y
del módulo de seguridad son diferentes.
VOUT_SERVICE = 1VOUT_PS_EN = 0
� � � � �
Encendido enverde
El módulo de seguridad está en el estado “preparado parafuncionar, ninguna función de seguridad solicitada”.El módulo de seguridad está inicializado libre de fallos ypreparado para funcionar.
VOUT_READY = 1VOUT_PS_EN = 1
� � � � �
Apagado El módulo de seguridad no está inicializado / no estápreparado para funcionar.
VOUT_READY = 0VOUT_PS_EN = 0� � � � �
1) Componente de las “salidas virturales” � Sección B.1.3, Tab. B.6
Tab. 5.1 Indicadores LED del módulo de seguridad
Hallará la descripción completa de los estados en � Sección 2.10.1, Tab. 2.88.
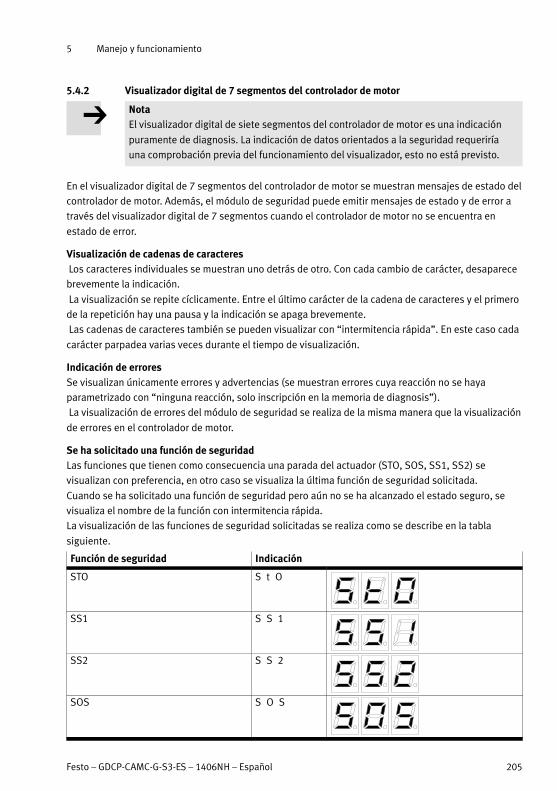
5 Manejo y funcionamiento
Festo – GDCP-CAMC-G-S3-ES – 1406NH – Español 205
5.4.2 Visualizador digital de 7 segmentos del controlador de motor
NotaEl visualizador digital de siete segmentos del controlador de motor es una indicación
puramente de diagnosis. La indicación de datos orientados a la seguridad requeriría
una comprobación previa del funcionamiento del visualizador, esto no está previsto.
En el visualizador digital de 7 segmentos del controlador de motor se muestran mensajes de estado del
controlador de motor. Además, el módulo de seguridad puede emitir mensajes de estado y de error a
través del visualizador digital de 7 segmentos cuando el controlador de motor no se encuentra en
estado de error.
Visualización de cadenas de caracteres Los caracteres individuales se muestran uno detrás de otro. Con cada cambio de carácter, desaparece
brevemente la indicación.
La visualización se repite cíclicamente. Entre el último carácter de la cadena de caracteres y el primero
de la repetición hay una pausa y la indicación se apaga brevemente.
Las cadenas de caracteres también se pueden visualizar con “intermitencia rápida”. En este caso cada
carácter parpadea varias veces durante el tiempo de visualización.
Indicación de erroresSe visualizan únicamente errores y advertencias (se muestran errores cuya reacción no se haya
parametrizado con “ninguna reacción, solo inscripción en la memoria de diagnosis”).
La visualización de errores del módulo de seguridad se realiza de la misma manera que la visualización
de errores en el controlador de motor.
Se ha solicitado una función de seguridadLas funciones que tienen como consecuencia una parada del actuador (STO, SOS, SS1, SS2) se
visualizan con preferencia, en otro caso se visualiza la última función de seguridad solicitada.
Cuando se ha solicitado una función de seguridad pero aún no se ha alcanzado el estado seguro, se
visualiza el nombre de la función con intermitencia rápida.
La visualización de las funciones de seguridad solicitadas se realiza como se describe en la tabla
siguiente.
Función de seguridad Indicación
STO S t O
SS1 S S 1
SS2 S S 2
SOS S O S
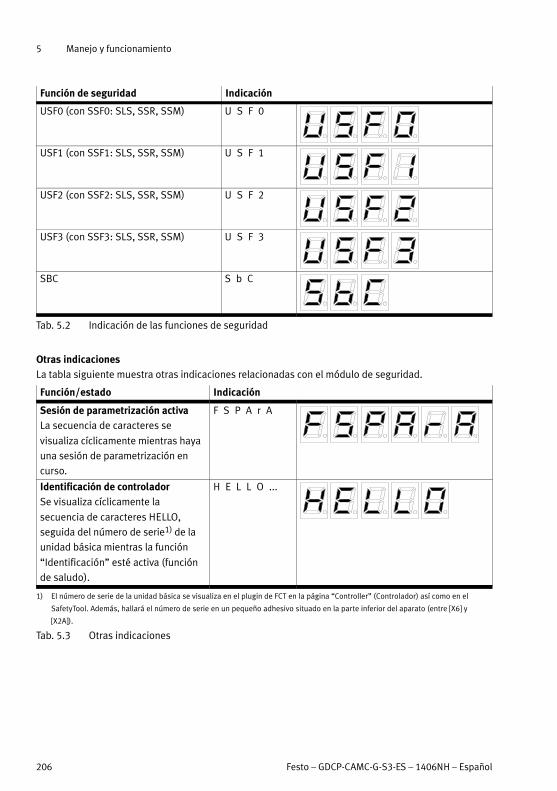
5 Manejo y funcionamiento
206 Festo – GDCP-CAMC-G-S3-ES – 1406NH – Español
Función de seguridad Indicación
USF0 (con SSF0: SLS, SSR, SSM) U S F 0
USF1 (con SSF1: SLS, SSR, SSM) U S F 1
USF2 (con SSF2: SLS, SSR, SSM) U S F 2
USF3 (con SSF3: SLS, SSR, SSM) U S F 3
SBC S b C
Tab. 5.2 Indicación de las funciones de seguridad
Otras indicacionesLa tabla siguiente muestra otras indicaciones relacionadas con el módulo de seguridad.
Función/estado Indicación
Sesión de parametrización activaLa secuencia de caracteres se
visualiza cíclicamente mientras haya
una sesión de parametrización en
curso.
F S P A r A
Identificación de controladorSe visualiza cíclicamente la
secuencia de caracteres HELLO,
seguida del número de serie1) de la
unidad básica mientras la función
“Identificación” esté activa (función
de saludo).
H E L L O ...
1) El número de serie de la unidad básica se visualiza en el plugin de FCT en la página “Controller” (Controlador) así como en el
SafetyTool. Además, hallará el número de serie en un pequeño adhesivo situado en la parte inferior del aparato (entre [X6] y
[X2A]).
Tab. 5.3 Otras indicaciones
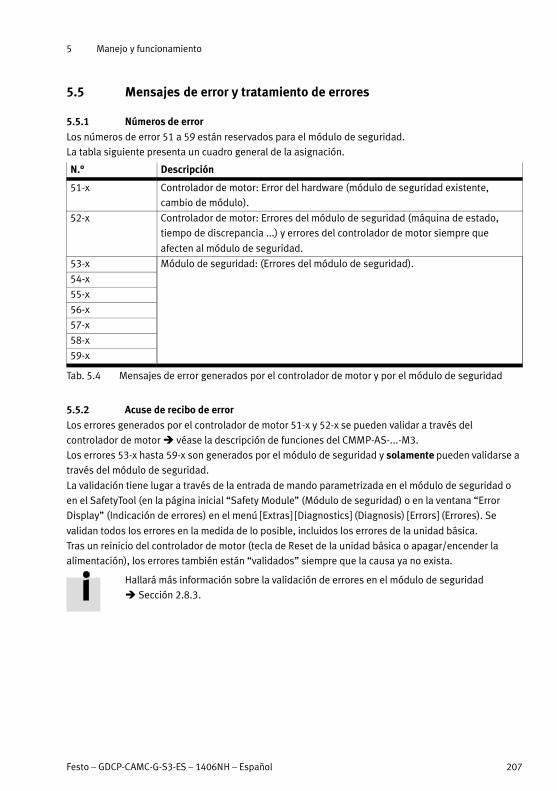
5 Manejo y funcionamiento
Festo – GDCP-CAMC-G-S3-ES – 1406NH – Español 207
5.5 Mensajes de error y tratamiento de errores
5.5.1 Números de error
Los números de error 51 a 59 están reservados para el módulo de seguridad.
La tabla siguiente presenta un cuadro general de la asignación.
N.° Descripción
51-x Controlador de motor: Error del hardware (módulo de seguridad existente,
cambio de módulo).
52-x Controlador de motor: Errores del módulo de seguridad (máquina de estado,
tiempo de discrepancia ...) y errores del controlador de motor siempre que
afecten al módulo de seguridad.
53-x Módulo de seguridad: (Errores del módulo de seguridad).
54-x
55-x
56-x
57-x
58-x
59-x
Tab. 5.4 Mensajes de error generados por el controlador de motor y por el módulo de seguridad
5.5.2 Acuse de recibo de error
Los errores generados por el controlador de motor 51-x y 52-x se pueden validar a través del
controlador de motor � véase la descripción de funciones del CMMP-AS-...-M3.
Los errores 53-x hasta 59-x son generados por el módulo de seguridad y solamente pueden validarse a
través del módulo de seguridad.
La validación tiene lugar a través de la entrada de mando parametrizada en el módulo de seguridad o
en el SafetyTool (en la página inicial “Safety Module” (Módulo de seguridad) o en la ventana “Error
Display” (Indicación de errores) en el menú [Extras] [Diagnostics] (Diagnosis) [Errors] (Errores). Se
validan todos los errores en la medida de lo posible, incluidos los errores de la unidad básica.
Tras un reinicio del controlador de motor (tecla de Reset de la unidad básica o apagar/encender la
alimentación), los errores también están “validados” siempre que la causa ya no exista.
Hallará más información sobre la validación de errores en el módulo de seguridad
� Sección 2.8.3.
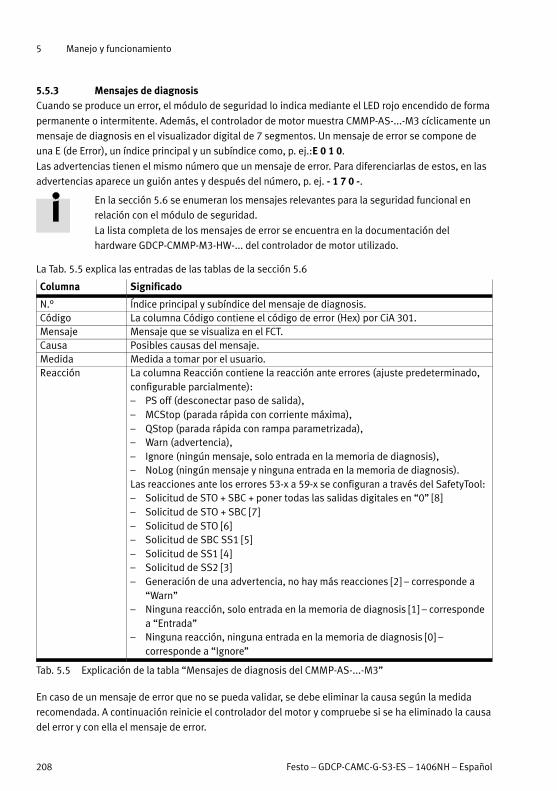
5 Manejo y funcionamiento
208 Festo – GDCP-CAMC-G-S3-ES – 1406NH – Español
5.5.3 Mensajes de diagnosisCuando se produce un error, el módulo de seguridad lo indica mediante el LED rojo encendido de forma
permanente o intermitente. Además, el controlador de motor muestra CMMP-AS-...-M3 cíclicamente un
mensaje de diagnosis en el visualizador digital de 7 segmentos. Un mensaje de error se compone de
una E (de Error), un índice principal y un subíndice como, p. ej.:E 0 1 0.
Las advertencias tienen el mismo número que un mensaje de error. Para diferenciarlas de estos, en las
advertencias aparece un guión antes y después del número, p. ej. - 1 7 0 -.
En la sección 5.6 se enumeran los mensajes relevantes para la seguridad funcional en
relación con el módulo de seguridad.
La lista completa de los mensajes de error se encuentra en la documentación del
hardware GDCP-CMMP-M3-HW-... del controlador de motor utilizado.
La Tab. 5.5 explica las entradas de las tablas de la sección 5.6
Columna Significado
N.° Índice principal y subíndice del mensaje de diagnosis.Código La columna Código contiene el código de error (Hex) por CiA 301.Mensaje Mensaje que se visualiza en el FCT.Causa Posibles causas del mensaje.Medida Medida a tomar por el usuario.Reacción La columna Reacción contiene la reacción ante errores (ajuste predeterminado,
configurable parcialmente):– PS off (desconectar paso de salida),– MCStop (parada rápida con corriente máxima),– QStop (parada rápida con rampa parametrizada),– Warn (advertencia),– Ignore (ningún mensaje, solo entrada en la memoria de diagnosis),– NoLog (ningún mensaje y ninguna entrada en la memoria de diagnosis).Las reacciones ante los errores 53-x a 59-x se configuran a través del SafetyTool:– Solicitud de STO + SBC + poner todas las salidas digitales en “0” [8]– Solicitud de STO + SBC [7]– Solicitud de STO [6]– Solicitud de SBC SS1 [5]– Solicitud de SS1 [4]– Solicitud de SS2 [3]– Generación de una advertencia, no hay más reacciones [2] – corresponde a
“Warn”– Ninguna reacción, solo entrada en la memoria de diagnosis [1] – corresponde
a “Entrada”– Ninguna reacción, ninguna entrada en la memoria de diagnosis [0] –
corresponde a “Ignore”
Tab. 5.5 Explicación de la tabla “Mensajes de diagnosis del CMMP-AS-...-M3”
En caso de un mensaje de error que no se pueda validar, se debe eliminar la causa según la medida
recomendada. A continuación reinicie el controlador del motor y compruebe si se ha eliminado la causa
del error y con ella el mensaje de error.
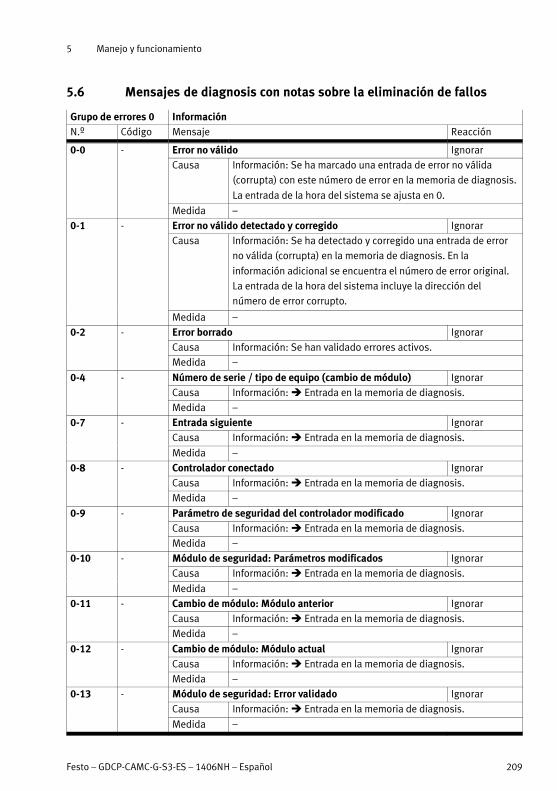
5 Manejo y funcionamiento
Festo – GDCP-CAMC-G-S3-ES – 1406NH – Español 209
5.6 Mensajes de diagnosis con notas sobre la eliminación de fallos
Grupo de errores 0 InformaciónN.º Código Mensaje Reacción
0-0 - Error no válido Ignorar
Causa Información: Se ha marcado una entrada de error no válida
(corrupta) con este número de error en la memoria de diagnosis.
La entrada de la hora del sistema se ajusta en 0.
Medida –
0-1 - Error no válido detectado y corregido Ignorar
Causa Información: Se ha detectado y corregido una entrada de error
no válida (corrupta) en la memoria de diagnosis. En la
información adicional se encuentra el número de error original.
La entrada de la hora del sistema incluye la dirección del
número de error corrupto.
Medida –
0-2 - Error borrado Ignorar
Causa Información: Se han validado errores activos.
Medida –
0-4 - Número de serie / tipo de equipo (cambio de módulo) Ignorar
Causa Información: � Entrada en la memoria de diagnosis.
Medida –
0-7 - Entrada siguiente Ignorar
Causa Información: � Entrada en la memoria de diagnosis.
Medida –
0-8 - Controlador conectado Ignorar
Causa Información: � Entrada en la memoria de diagnosis.
Medida –
0-9 - Parámetro de seguridad del controlador modificado Ignorar
Causa Información: � Entrada en la memoria de diagnosis.
Medida –
0-10 - Módulo de seguridad: Parámetros modificados Ignorar
Causa Información: � Entrada en la memoria de diagnosis.
Medida –
0-11 - Cambio de módulo: Módulo anterior Ignorar
Causa Información: � Entrada en la memoria de diagnosis.
Medida –
0-12 - Cambio de módulo: Módulo actual Ignorar
Causa Información: � Entrada en la memoria de diagnosis.
Medida –
0-13 - Módulo de seguridad: Error validado Ignorar
Causa Información: � Entrada en la memoria de diagnosis.
Medida –
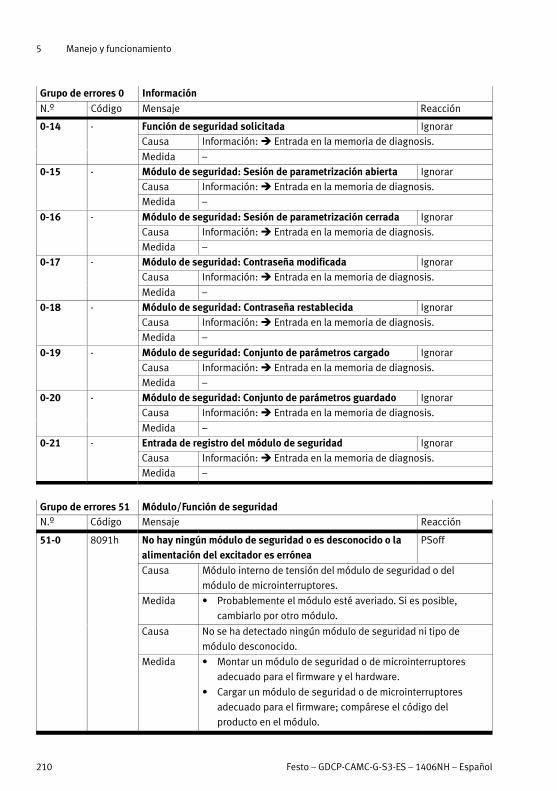
5 Manejo y funcionamiento
210 Festo – GDCP-CAMC-G-S3-ES – 1406NH – Español
Grupo de errores 0 Información
N.º ReacciónMensajeCódigo
0-14 - Función de seguridad solicitada Ignorar
Causa Información: � Entrada en la memoria de diagnosis.
Medida –
0-15 - Módulo de seguridad: Sesión de parametrización abierta Ignorar
Causa Información: � Entrada en la memoria de diagnosis.
Medida –
0-16 - Módulo de seguridad: Sesión de parametrización cerrada Ignorar
Causa Información: � Entrada en la memoria de diagnosis.
Medida –
0-17 - Módulo de seguridad: Contraseña modificada Ignorar
Causa Información: � Entrada en la memoria de diagnosis.
Medida –
0-18 - Módulo de seguridad: Contraseña restablecida Ignorar
Causa Información: � Entrada en la memoria de diagnosis.
Medida –
0-19 - Módulo de seguridad: Conjunto de parámetros cargado Ignorar
Causa Información: � Entrada en la memoria de diagnosis.
Medida –
0-20 - Módulo de seguridad: Conjunto de parámetros guardado Ignorar
Causa Información: � Entrada en la memoria de diagnosis.
Medida –
0-21 - Entrada de registro del módulo de seguridad Ignorar
Causa Información: � Entrada en la memoria de diagnosis.
Medida –
Grupo de errores 51 Módulo/Función de seguridadN.º Código Mensaje Reacción
51-0 8091h No hay ningún módulo de seguridad o es desconocido o laalimentación del excitador es errónea
PSoff
Causa Módulo interno de tensión del módulo de seguridad o del
módulo de microinterruptores.
Medida � Probablemente el módulo esté averiado. Si es posible,
cambiarlo por otro módulo.
Causa No se ha detectado ningún módulo de seguridad ni tipo de
módulo desconocido.
Medida � Montar un módulo de seguridad o de microinterruptores
adecuado para el firmware y el hardware.
� Cargar un módulo de seguridad o de microinterruptores
adecuado para el firmware; compárese el código del
producto en el módulo.
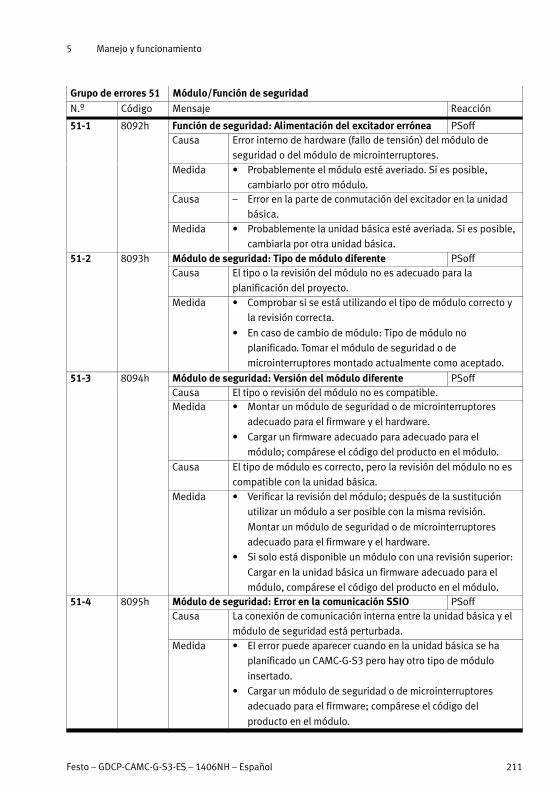
5 Manejo y funcionamiento
Festo – GDCP-CAMC-G-S3-ES – 1406NH – Español 211
Grupo de errores 51 Módulo/Función de seguridad
N.º ReacciónMensajeCódigo
51-1 8092h Función de seguridad: Alimentación del excitador errónea PSoffCausa Error interno de hardware (fallo de tensión) del módulo de
seguridad o del módulo de microinterruptores.Medida � Probablemente el módulo esté averiado. Si es posible,
cambiarlo por otro módulo.Causa – Error en la parte de conmutación del excitador en la unidad
básica.Medida � Probablemente la unidad básica esté averiada. Si es posible,
cambiarla por otra unidad básica.51-2 8093h Módulo de seguridad: Tipo de módulo diferente PSoff
Causa El tipo o la revisión del módulo no es adecuado para la
planificación del proyecto.Medida � Comprobar si se está utilizando el tipo de módulo correcto y
la revisión correcta.
� En caso de cambio de módulo: Tipo de módulo no
planificado. Tomar el módulo de seguridad o de
microinterruptores montado actualmente como aceptado.
51-3 8094h Módulo de seguridad: Versión del módulo diferente PSoffCausa El tipo o revisión del módulo no es compatible.Medida � Montar un módulo de seguridad o de microinterruptores
adecuado para el firmware y el hardware.
� Cargar un firmware adecuado para adecuado para el
módulo; compárese el código del producto en el módulo.
Causa El tipo de módulo es correcto, pero la revisión del módulo no es
compatible con la unidad básica.Medida � Verificar la revisión del módulo; después de la sustitución
utilizar un módulo a ser posible con la misma revisión.
Montar un módulo de seguridad o de microinterruptores
adecuado para el firmware y el hardware.
� Si solo está disponible un módulo con una revisión superior:
Cargar en la unidad básica un firmware adecuado para el
módulo, compárese el código del producto en el módulo.51-4 8095h Módulo de seguridad: Error en la comunicación SSIO PSoff
Causa La conexión de comunicación interna entre la unidad básica y el
módulo de seguridad está perturbada.Medida � El error puede aparecer cuando en la unidad básica se ha
planificado un CAMC-G-S3 pero hay otro tipo de módulo
insertado.
� Cargar un módulo de seguridad o de microinterruptores
adecuado para el firmware; compárese el código del
producto en el módulo.
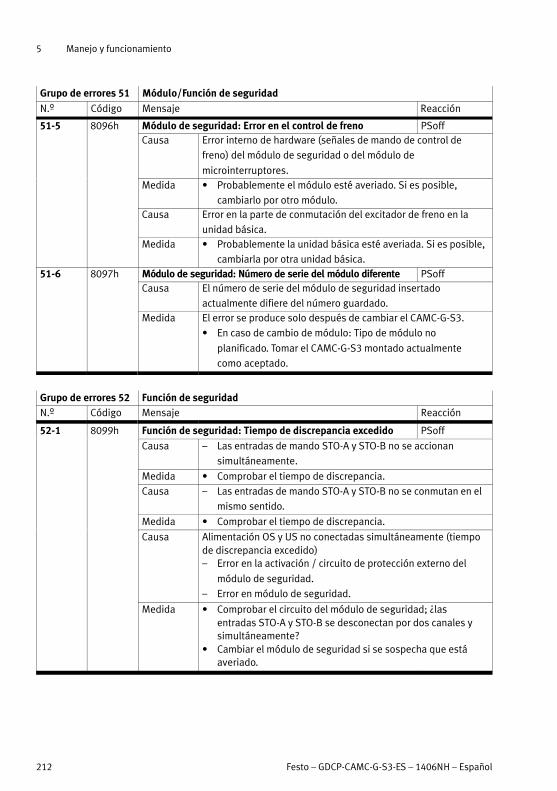
5 Manejo y funcionamiento
212 Festo – GDCP-CAMC-G-S3-ES – 1406NH – Español
Grupo de errores 51 Módulo/Función de seguridad
N.º ReacciónMensajeCódigo
51-5 8096h Módulo de seguridad: Error en el control de freno PSoffCausa Error interno de hardware (señales de mando de control de
freno) del módulo de seguridad o del módulo de
microinterruptores.Medida � Probablemente el módulo esté averiado. Si es posible,
cambiarlo por otro módulo.Causa Error en la parte de conmutación del excitador de freno en la
unidad básica.Medida � Probablemente la unidad básica esté averiada. Si es posible,
cambiarla por otra unidad básica.51-6 8097h Módulo de seguridad: Número de serie del módulo diferente PSoff
Causa El número de serie del módulo de seguridad insertado
actualmente difiere del número guardado.Medida El error se produce solo después de cambiar el CAMC-G-S3.
� En caso de cambio de módulo: Tipo de módulo no
planificado. Tomar el CAMC-G-S3 montado actualmente
como aceptado.
Grupo de errores 52 Función de seguridadN.º Código Mensaje Reacción
52-1 8099h Función de seguridad: Tiempo de discrepancia excedido PSoff
Causa – Las entradas de mando STO-A y STO-B no se accionan
simultáneamente.
Medida � Comprobar el tiempo de discrepancia.
Causa – Las entradas de mando STO-A y STO-B no se conmutan en el
mismo sentido.
Medida � Comprobar el tiempo de discrepancia.
Causa Alimentación OS y US no conectadas simultáneamente (tiempode discrepancia excedido)– Error en la activación / circuito de protección externo del
módulo de seguridad.
– Error en módulo de seguridad.
Medida � Comprobar el circuito del módulo de seguridad; ¿lasentradas STO-A y STO-B se desconectan por dos canales ysimultáneamente?
� Cambiar el módulo de seguridad si se sospecha que estáaveriado.
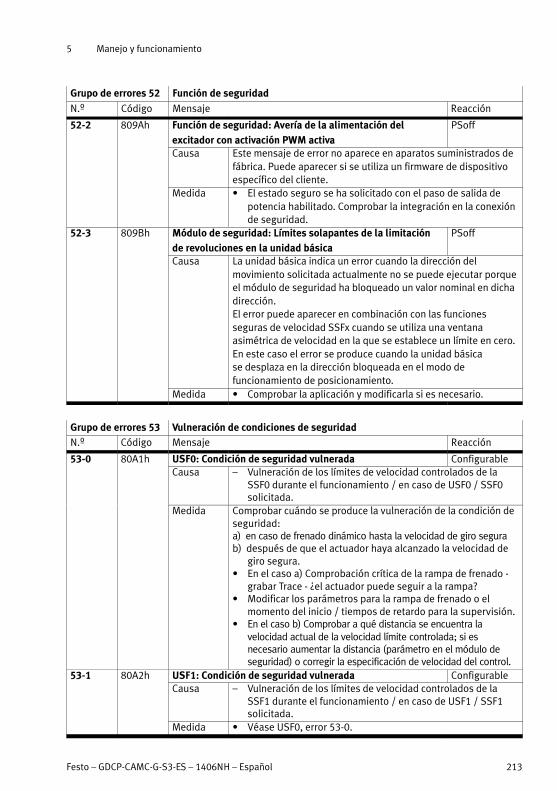
5 Manejo y funcionamiento
Festo – GDCP-CAMC-G-S3-ES – 1406NH – Español 213
Grupo de errores 52 Función de seguridad
N.º ReacciónMensajeCódigo
52-2 809Ah Función de seguridad: Avería de la alimentación delexcitador con activación PWM activa
PSoff
Causa Este mensaje de error no aparece en aparatos suministrados defábrica. Puede aparecer si se utiliza un firmware de dispositivoespecífico del cliente.
Medida � El estado seguro se ha solicitado con el paso de salida depotencia habilitado. Comprobar la integración en la conexiónde seguridad.
52-3 809Bh Módulo de seguridad: Límites solapantes de la limitaciónde revoluciones en la unidad básica
PSoff
Causa La unidad básica indica un error cuando la dirección delmovimiento solicitada actualmente no se puede ejecutar porqueel módulo de seguridad ha bloqueado un valor nominal en dichadirección.El error puede aparecer en combinación con las funcionesseguras de velocidad SSFx cuando se utiliza una ventanaasimétrica de velocidad en la que se establece un límite en cero.En este caso el error se produce cuando la unidad básicase desplaza en la dirección bloqueada en el modo defuncionamiento de posicionamiento.
Medida � Comprobar la aplicación y modificarla si es necesario.
Grupo de errores 53 Vulneración de condiciones de seguridadN.º Código Mensaje Reacción
53-0 80A1h USF0: Condición de seguridad vulnerada ConfigurableCausa – Vulneración de los límites de velocidad controlados de la
SSF0 durante el funcionamiento / en caso de USF0 / SSF0solicitada.
Medida Comprobar cuándo se produce la vulneración de la condición deseguridad:a) en caso de frenado dinámico hasta la velocidad de giro segurab) después de que el actuador haya alcanzado la velocidad de
giro segura.� En el caso a) Comprobación crítica de la rampa de frenado -
grabar Trace - ¿el actuador puede seguir a la rampa?� Modificar los parámetros para la rampa de frenado o el
momento del inicio / tiempos de retardo para la supervisión.� En el caso b) Comprobar a qué distancia se encuentra la
velocidad actual de la velocidad límite controlada; si esnecesario aumentar la distancia (parámetro en el módulo deseguridad) o corregir la especificación de velocidad del control.
53-1 80A2h USF1: Condición de seguridad vulnerada ConfigurableCausa – Vulneración de los límites de velocidad controlados de la
SSF1 durante el funcionamiento / en caso de USF1 / SSF1solicitada.
Medida � Véase USF0, error 53-0.
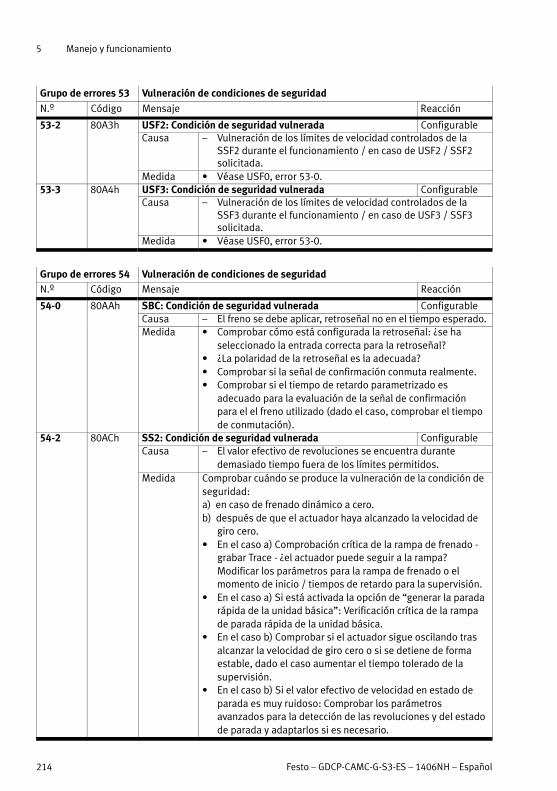
5 Manejo y funcionamiento
214 Festo – GDCP-CAMC-G-S3-ES – 1406NH – Español
Grupo de errores 53 Vulneración de condiciones de seguridad
N.º ReacciónMensajeCódigo
53-2 80A3h USF2: Condición de seguridad vulnerada ConfigurableCausa – Vulneración de los límites de velocidad controlados de la
SSF2 durante el funcionamiento / en caso de USF2 / SSF2solicitada.
Medida � Véase USF0, error 53-0.53-3 80A4h USF3: Condición de seguridad vulnerada Configurable
Causa – Vulneración de los límites de velocidad controlados de laSSF3 durante el funcionamiento / en caso de USF3 / SSF3solicitada.
Medida � Véase USF0, error 53-0.
Grupo de errores 54 Vulneración de condiciones de seguridadN.º Código Mensaje Reacción
54-0 80AAh SBC: Condición de seguridad vulnerada ConfigurableCausa – El freno se debe aplicar, retroseñal no en el tiempo esperado.Medida � Comprobar cómo está configurada la retroseñal: ¿se ha
seleccionado la entrada correcta para la retroseñal?� ¿La polaridad de la retroseñal es la adecuada?� Comprobar si la señal de confirmación conmuta realmente.� Comprobar si el tiempo de retardo parametrizado es
adecuado para la evaluación de la señal de confirmaciónpara el el freno utilizado (dado el caso, comprobar el tiempode conmutación).
54-2 80ACh SS2: Condición de seguridad vulnerada ConfigurableCausa – El valor efectivo de revoluciones se encuentra durante
demasiado tiempo fuera de los límites permitidos.Medida Comprobar cuándo se produce la vulneración de la condición de
seguridad:a) en caso de frenado dinámico a cero.b) después de que el actuador haya alcanzado la velocidad de
giro cero.� En el caso a) Comprobación crítica de la rampa de frenado -
grabar Trace - ¿el actuador puede seguir a la rampa?Modificar los parámetros para la rampa de frenado o elmomento de inicio / tiempos de retardo para la supervisión.
� En el caso a) Si está activada la opción de “generar la paradarápida de la unidad básica”: Verificación crítica de la rampade parada rápida de la unidad básica.
� En el caso b) Comprobar si el actuador sigue oscilando trasalcanzar la velocidad de giro cero o si se detiene de formaestable, dado el caso aumentar el tiempo tolerado de lasupervisión.
� En el caso b) Si el valor efectivo de velocidad en estado deparada es muy ruidoso: Comprobar los parámetrosavanzados para la detección de las revoluciones y del estadode parada y adaptarlos si es necesario.
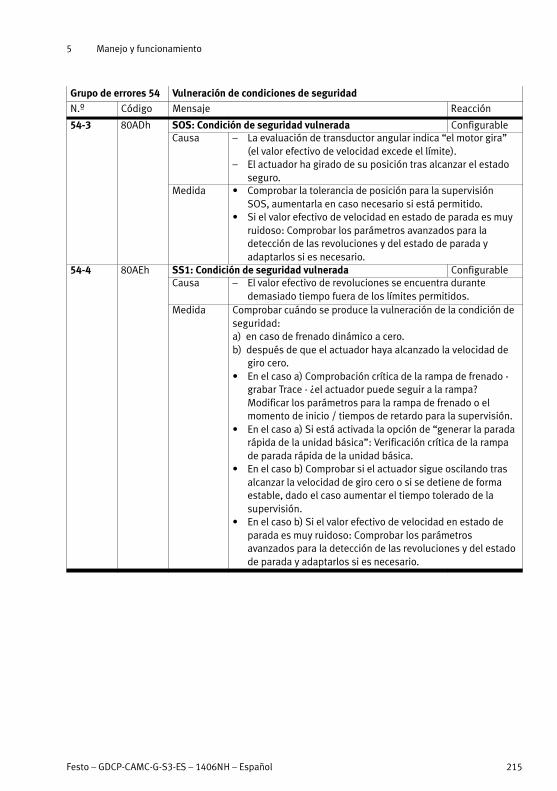
5 Manejo y funcionamiento
Festo – GDCP-CAMC-G-S3-ES – 1406NH – Español 215
Grupo de errores 54 Vulneración de condiciones de seguridad
N.º ReacciónMensajeCódigo
54-3 80ADh SOS: Condición de seguridad vulnerada ConfigurableCausa – La evaluación de transductor angular indica “el motor gira”
(el valor efectivo de velocidad excede el límite).– El actuador ha girado de su posición tras alcanzar el estado
seguro.Medida � Comprobar la tolerancia de posición para la supervisión
SOS, aumentarla en caso necesario si está permitido.� Si el valor efectivo de velocidad en estado de parada es muy
ruidoso: Comprobar los parámetros avanzados para ladetección de las revoluciones y del estado de parada yadaptarlos si es necesario.
54-4 80AEh SS1: Condición de seguridad vulnerada ConfigurableCausa – El valor efectivo de revoluciones se encuentra durante
demasiado tiempo fuera de los límites permitidos.Medida Comprobar cuándo se produce la vulneración de la condición de
seguridad:a) en caso de frenado dinámico a cero.b) después de que el actuador haya alcanzado la velocidad de
giro cero.� En el caso a) Comprobación crítica de la rampa de frenado -
grabar Trace - ¿el actuador puede seguir a la rampa?Modificar los parámetros para la rampa de frenado o elmomento de inicio / tiempos de retardo para la supervisión.
� En el caso a) Si está activada la opción de “generar la paradarápida de la unidad básica”: Verificación crítica de la rampade parada rápida de la unidad básica.
� En el caso b) Comprobar si el actuador sigue oscilando trasalcanzar la velocidad de giro cero o si se detiene de formaestable, dado el caso aumentar el tiempo tolerado de lasupervisión.
� En el caso b) Si el valor efectivo de velocidad en estado deparada es muy ruidoso: Comprobar los parámetrosavanzados para la detección de las revoluciones y del estadode parada y adaptarlos si es necesario.
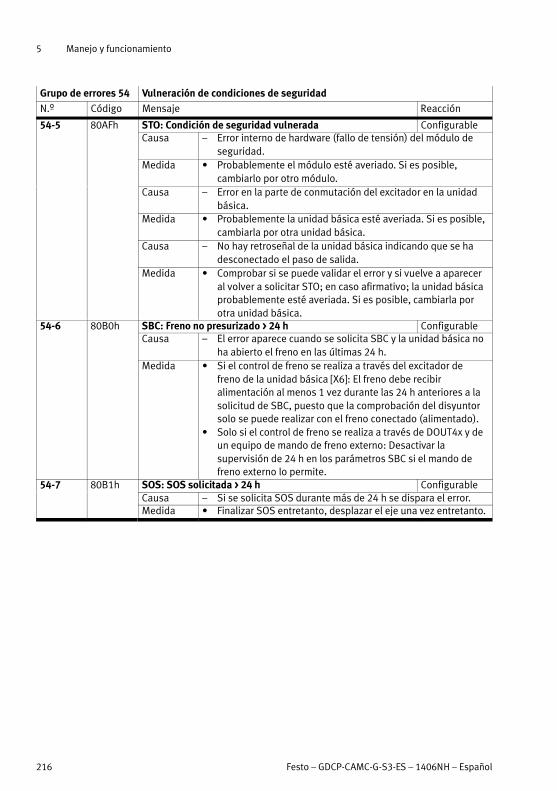
5 Manejo y funcionamiento
216 Festo – GDCP-CAMC-G-S3-ES – 1406NH – Español
Grupo de errores 54 Vulneración de condiciones de seguridad
N.º ReacciónMensajeCódigo
54-5 80AFh STO: Condición de seguridad vulnerada ConfigurableCausa – Error interno de hardware (fallo de tensión) del módulo de
seguridad.Medida � Probablemente el módulo esté averiado. Si es posible,
cambiarlo por otro módulo.Causa – Error en la parte de conmutación del excitador en la unidad
básica.Medida � Probablemente la unidad básica esté averiada. Si es posible,
cambiarla por otra unidad básica.Causa – No hay retroseñal de la unidad básica indicando que se ha
desconectado el paso de salida.Medida � Comprobar si se puede validar el error y si vuelve a aparecer
al volver a solicitar STO; en caso afirmativo; la unidad básicaprobablemente esté averiada. Si es posible, cambiarla porotra unidad básica.
54-6 80B0h SBC: Freno no presurizado > 24 h ConfigurableCausa – El error aparece cuando se solicita SBC y la unidad básica no
ha abierto el freno en las últimas 24 h.Medida � Si el control de freno se realiza a través del excitador de
freno de la unidad básica [X6]: El freno debe recibiralimentación al menos 1 vez durante las 24 h anteriores a lasolicitud de SBC, puesto que la comprobación del disyuntorsolo se puede realizar con el freno conectado (alimentado).
� Solo si el control de freno se realiza a través de DOUT4x y deun equipo de mando de freno externo: Desactivar lasupervisión de 24 h en los parámetros SBC si el mando defreno externo lo permite.
54-7 80B1h SOS: SOS solicitada > 24 h ConfigurableCausa – Si se solicita SOS durante más de 24 h se dispara el error.Medida � Finalizar SOS entretanto, desplazar el eje una vez entretanto.
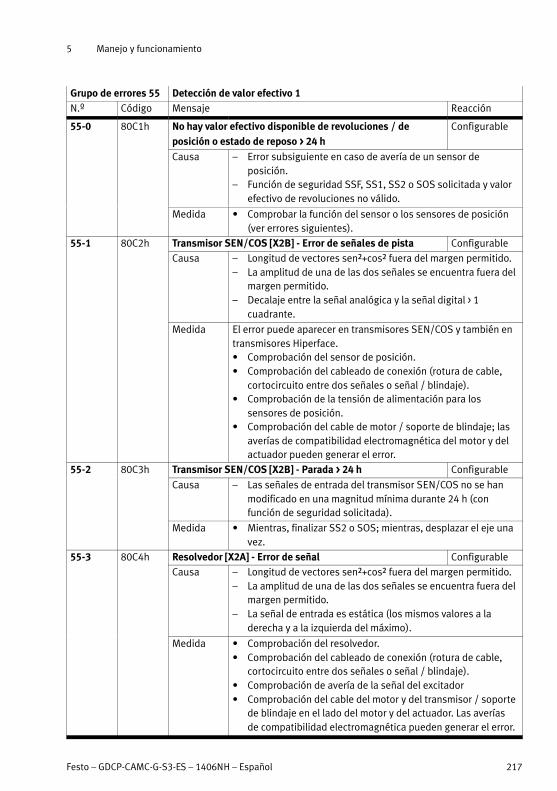
5 Manejo y funcionamiento
Festo – GDCP-CAMC-G-S3-ES – 1406NH – Español 217
Grupo de errores 55 Detección de valor efectivo 1N.º Código Mensaje Reacción
55-0 80C1h No hay valor efectivo disponible de revoluciones / deposición o estado de reposo > 24 h
Configurable
Causa – Error subsiguiente en caso de avería de un sensor deposición.
– Función de seguridad SSF, SS1, SS2 o SOS solicitada y valorefectivo de revoluciones no válido.
Medida � Comprobar la función del sensor o los sensores de posición(ver errores siguientes).
55-1 80C2h Transmisor SEN/COS [X2B] - Error de señales de pista Configurable
Causa – Longitud de vectores sen²+cos² fuera del margen permitido.– La amplitud de una de las dos señales se encuentra fuera del
margen permitido.– Decalaje entre la señal analógica y la señal digital > 1
cuadrante.
Medida El error puede aparecer en transmisores SEN/COS y también entransmisores Hiperface.� Comprobación del sensor de posición.� Comprobación del cableado de conexión (rotura de cable,
cortocircuito entre dos señales o señal / blindaje).� Comprobación de la tensión de alimentación para los
sensores de posición.� Comprobación del cable de motor / soporte de blindaje; las
averías de compatibilidad electromagnética del motor y delactuador pueden generar el error.
55-2 80C3h Transmisor SEN/COS [X2B] - Parada > 24 h Configurable
Causa – Las señales de entrada del transmisor SEN/COS no se hanmodificado en una magnitud mínima durante 24 h (confunción de seguridad solicitada).
Medida � Mientras, finalizar SS2 o SOS; mientras, desplazar el eje unavez.
55-3 80C4h Resolvedor [X2A] - Error de señal Configurable
Causa – Longitud de vectores sen²+cos² fuera del margen permitido.– La amplitud de una de las dos señales se encuentra fuera del
margen permitido.– La señal de entrada es estática (los mismos valores a la
derecha y a la izquierda del máximo).
Medida � Comprobación del resolvedor.� Comprobación del cableado de conexión (rotura de cable,
cortocircuito entre dos señales o señal / blindaje).� Comprobación de avería de la señal del excitador� Comprobación del cable del motor y del transmisor / soporte
de blindaje en el lado del motor y del actuador. Las averíasde compatibilidad electromagnética pueden generar el error.
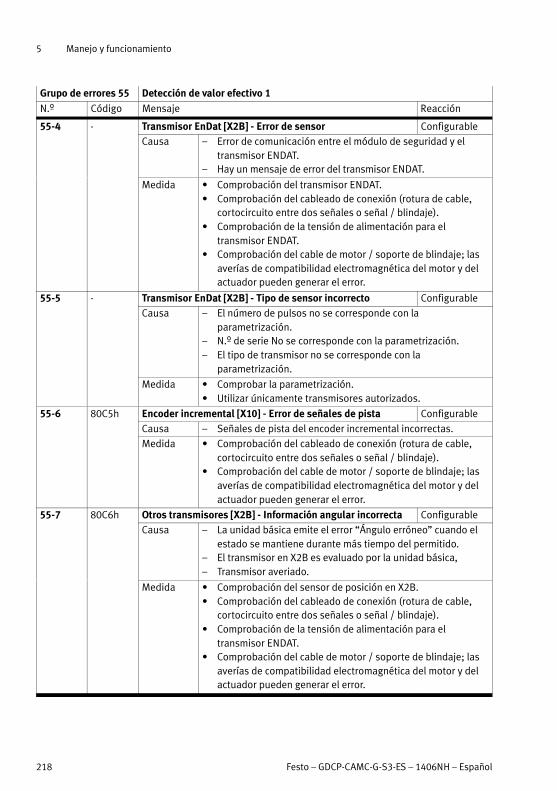
5 Manejo y funcionamiento
218 Festo – GDCP-CAMC-G-S3-ES – 1406NH – Español
Grupo de errores 55 Detección de valor efectivo 1
N.º ReacciónMensajeCódigo
55-4 - Transmisor EnDat [X2B] - Error de sensor Configurable
Causa – Error de comunicación entre el módulo de seguridad y eltransmisor ENDAT.
– Hay un mensaje de error del transmisor ENDAT.
Medida � Comprobación del transmisor ENDAT.� Comprobación del cableado de conexión (rotura de cable,
cortocircuito entre dos señales o señal / blindaje).� Comprobación de la tensión de alimentación para el
transmisor ENDAT.� Comprobación del cable de motor / soporte de blindaje; las
averías de compatibilidad electromagnética del motor y delactuador pueden generar el error.
55-5 - Transmisor EnDat [X2B] - Tipo de sensor incorrecto Configurable
Causa – El número de pulsos no se corresponde con laparametrización.
– N.º de serie No se corresponde con la parametrización.– El tipo de transmisor no se corresponde con la
parametrización.
Medida � Comprobar la parametrización.� Utilizar únicamente transmisores autorizados.
55-6 80C5h Encoder incremental [X10] - Error de señales de pista Configurable
Causa – Señales de pista del encoder incremental incorrectas.
Medida � Comprobación del cableado de conexión (rotura de cable,cortocircuito entre dos señales o señal / blindaje).
� Comprobación del cable de motor / soporte de blindaje; lasaverías de compatibilidad electromagnética del motor y delactuador pueden generar el error.
55-7 80C6h Otros transmisores [X2B] - Información angular incorrecta Configurable
Causa – La unidad básica emite el error “Ángulo erróneo” cuando elestado se mantiene durante más tiempo del permitido.
– El transmisor en X2B es evaluado por la unidad básica,– Transmisor averiado.
Medida � Comprobación del sensor de posición en X2B.� Comprobación del cableado de conexión (rotura de cable,
cortocircuito entre dos señales o señal / blindaje).� Comprobación de la tensión de alimentación para el
transmisor ENDAT.� Comprobación del cable de motor / soporte de blindaje; las
averías de compatibilidad electromagnética del motor y delactuador pueden generar el error.
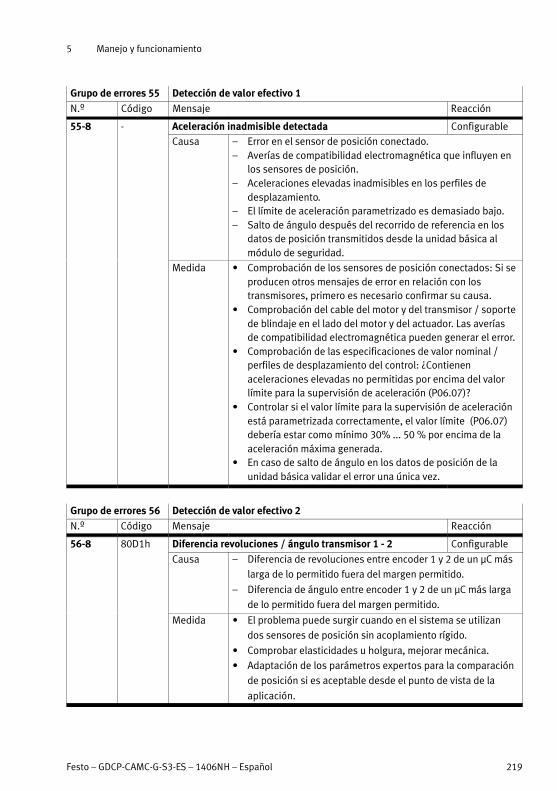
5 Manejo y funcionamiento
Festo – GDCP-CAMC-G-S3-ES – 1406NH – Español 219
Grupo de errores 55 Detección de valor efectivo 1
N.º ReacciónMensajeCódigo
55-8 - Aceleración inadmisible detectada Configurable
Causa – Error en el sensor de posición conectado.– Averías de compatibilidad electromagnética que influyen en
los sensores de posición.– Aceleraciones elevadas inadmisibles en los perfiles de
desplazamiento.– El límite de aceleración parametrizado es demasiado bajo.– Salto de ángulo después del recorrido de referencia en los
datos de posición transmitidos desde la unidad básica almódulo de seguridad.
Medida � Comprobación de los sensores de posición conectados: Si seproducen otros mensajes de error en relación con lostransmisores, primero es necesario confirmar su causa.
� Comprobación del cable del motor y del transmisor / soportede blindaje en el lado del motor y del actuador. Las averíasde compatibilidad electromagnética pueden generar el error.
� Comprobación de las especificaciones de valor nominal /perfiles de desplazamiento del control: ¿Contienenaceleraciones elevadas no permitidas por encima del valorlímite para la supervisión de aceleración (P06.07)?
� Controlar si el valor límite para la supervisión de aceleraciónestá parametrizada correctamente, el valor límite (P06.07)debería estar como mínimo 30% ... 50 % por encima de laaceleración máxima generada.
� En caso de salto de ángulo en los datos de posición de launidad básica validar el error una única vez.
Grupo de errores 56 Detección de valor efectivo 2
N.º Código Mensaje Reacción
56-8 80D1h Diferencia revoluciones / ángulo transmisor 1 - 2 Configurable
Causa – Diferencia de revoluciones entre encoder 1 y 2 de un μC más
larga de lo permitido fuera del margen permitido.
– Diferencia de ángulo entre encoder 1 y 2 de un μC más larga
de lo permitido fuera del margen permitido.
Medida � El problema puede surgir cuando en el sistema se utilizan
dos sensores de posición sin acoplamiento rígido.
� Comprobar elasticidades u holgura, mejorar mecánica.
� Adaptación de los parámetros expertos para la comparación
de posición si es aceptable desde el punto de vista de la
aplicación.
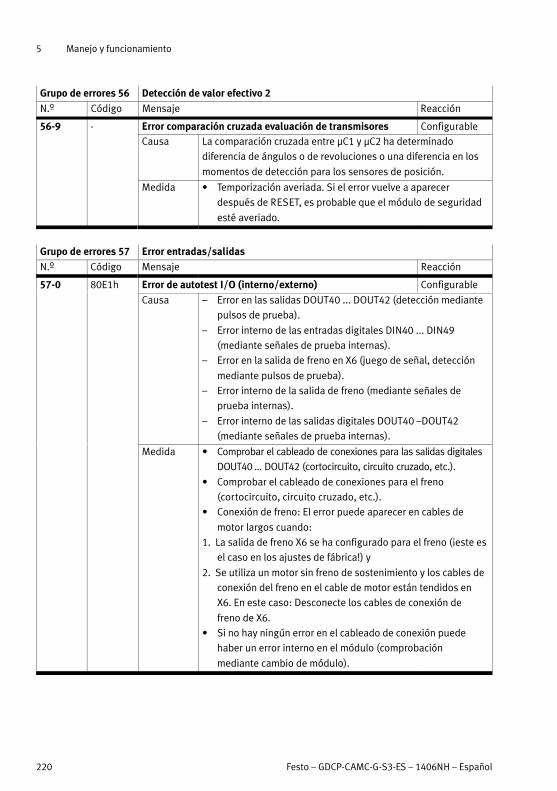
5 Manejo y funcionamiento
220 Festo – GDCP-CAMC-G-S3-ES – 1406NH – Español
Grupo de errores 56 Detección de valor efectivo 2
N.º ReacciónMensajeCódigo
56-9 - Error comparación cruzada evaluación de transmisores Configurable
Causa La comparación cruzada entre μC1 y μC2 ha determinado
diferencia de ángulos o de revoluciones o una diferencia en los
momentos de detección para los sensores de posición.
Medida � Temporización averiada. Si el error vuelve a aparecer
después de RESET, es probable que el módulo de seguridad
esté averiado.
Grupo de errores 57 Error entradas/salidas
N.º Código Mensaje Reacción
57-0 80E1h Error de autotest I/O (interno/externo) Configurable
Causa – Error en las salidas DOUT40 ... DOUT42 (detección mediante
pulsos de prueba).
– Error interno de las entradas digitales DIN40 ... DIN49
(mediante señales de prueba internas).
– Error en la salida de freno en X6 (juego de señal, detección
mediante pulsos de prueba).
– Error interno de la salida de freno (mediante señales de
prueba internas).
– Error interno de las salidas digitales DOUT40 �DOUT42
(mediante señales de prueba internas).
Medida � Comprobar el cableado de conexiones para las salidas digitales
DOUT40 ... DOUT42 (cortocircuito, circuito cruzado, etc.).
� Comprobar el cableado de conexiones para el freno
(cortocircuito, circuito cruzado, etc.).
� Conexión de freno: El error puede aparecer en cables de
motor largos cuando:
1. La salida de freno X6 se ha configurado para el freno (¡este es
el caso en los ajustes de fábrica!) y
2. Se utiliza un motor sin freno de sostenimiento y los cables de
conexión del freno en el cable de motor están tendidos en
X6. En este caso: Desconecte los cables de conexión de
freno de X6.
� Si no hay ningún error en el cableado de conexión puede
haber un error interno en el módulo (comprobación
mediante cambio de módulo).
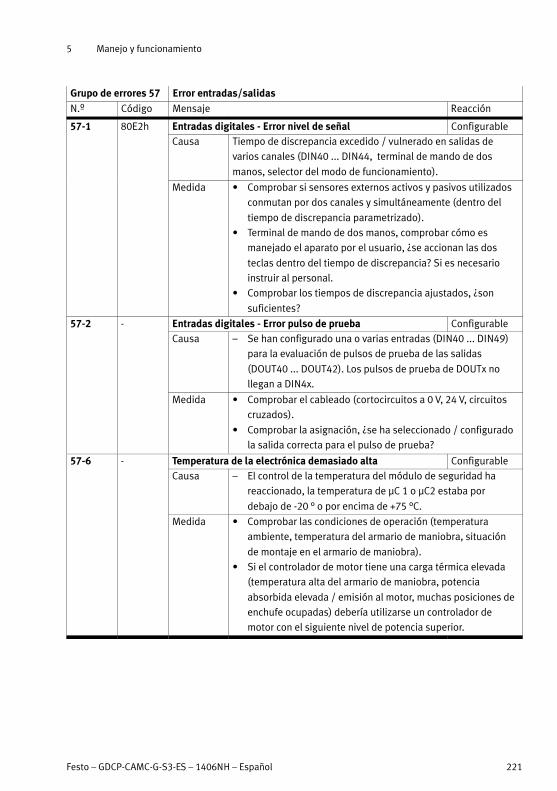
5 Manejo y funcionamiento
Festo – GDCP-CAMC-G-S3-ES – 1406NH – Español 221
Grupo de errores 57 Error entradas/salidas
N.º ReacciónMensajeCódigo
57-1 80E2h Entradas digitales - Error nivel de señal Configurable
Causa Tiempo de discrepancia excedido / vulnerado en salidas de
varios canales (DIN40 ... DIN44, terminal de mando de dos
manos, selector del modo de funcionamiento).
Medida � Comprobar si sensores externos activos y pasivos utilizados
conmutan por dos canales y simultáneamente (dentro del
tiempo de discrepancia parametrizado).
� Terminal de mando de dos manos, comprobar cómo es
manejado el aparato por el usuario, ¿se accionan las dos
teclas dentro del tiempo de discrepancia? Si es necesario
instruir al personal.
� Comprobar los tiempos de discrepancia ajustados, ¿son
suficientes?
57-2 - Entradas digitales - Error pulso de prueba Configurable
Causa – Se han configurado una o varias entradas (DIN40 ... DIN49)
para la evaluación de pulsos de prueba de las salidas
(DOUT40 ... DOUT42). Los pulsos de prueba de DOUTx no
llegan a DIN4x.
Medida � Comprobar el cableado (cortocircuitos a 0 V, 24 V, circuitos
cruzados).
� Comprobar la asignación, ¿se ha seleccionado / configurado
la salida correcta para el pulso de prueba?
57-6 - Temperatura de la electrónica demasiado alta Configurable
Causa – El control de la temperatura del módulo de seguridad ha
reaccionado, la temperatura de μC 1 o μC2 estaba por
debajo de -20 ° o por encima de +75 °C.
Medida � Comprobar las condiciones de operación (temperatura
ambiente, temperatura del armario de maniobra, situación
de montaje en el armario de maniobra).
� Si el controlador de motor tiene una carga térmica elevada
(temperatura alta del armario de maniobra, potencia
absorbida elevada / emisión al motor, muchas posiciones de
enchufe ocupadas) debería utilizarse un controlador de
motor con el siguiente nivel de potencia superior.
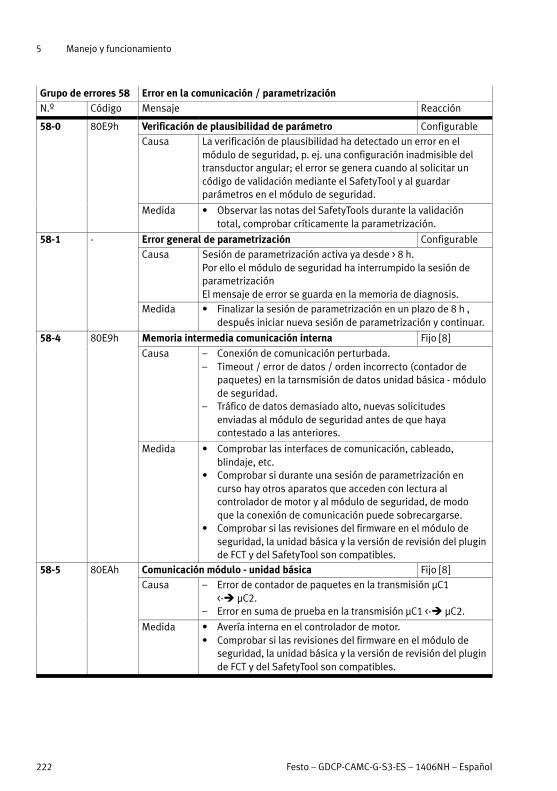
5 Manejo y funcionamiento
222 Festo – GDCP-CAMC-G-S3-ES – 1406NH – Español
Grupo de errores 58 Error en la comunicación / parametrizaciónN.º Código Mensaje Reacción
58-0 80E9h Verificación de plausibilidad de parámetro Configurable
Causa La verificación de plausibilidad ha detectado un error en elmódulo de seguridad, p. ej. una configuración inadmisible deltransductor angular; el error se genera cuando al solicitar uncódigo de validación mediante el SafetyTool y al guardarparámetros en el módulo de seguridad.
Medida � Observar las notas del SafetyTools durante la validacióntotal, comprobar críticamente la parametrización.
58-1 - Error general de parametrización Configurable
Causa Sesión de parametrización activa ya desde > 8 h.Por ello el módulo de seguridad ha interrumpido la sesión deparametrizaciónEl mensaje de error se guarda en la memoria de diagnosis.
Medida � Finalizar la sesión de parametrización en un plazo de 8 h ,después iniciar nueva sesión de parametrización y continuar.
58-4 80E9h Memoria intermedia comunicación interna Fijo [8]
Causa – Conexión de comunicación perturbada.– Timeout / error de datos / orden incorrecto (contador de
paquetes) en la tarnsmisión de datos unidad básica - módulode seguridad.
– Tráfico de datos demasiado alto, nuevas solicitudesenviadas al módulo de seguridad antes de que hayacontestado a las anteriores.
Medida � Comprobar las interfaces de comunicación, cableado,blindaje, etc.
� Comprobar si durante una sesión de parametrización encurso hay otros aparatos que acceden con lectura alcontrolador de motor y al módulo de seguridad, de modoque la conexión de comunicación puede sobrecargarse.
� Comprobar si las revisiones del firmware en el módulo deseguridad, la unidad básica y la versión de revisión del pluginde FCT y del SafetyTool son compatibles.
58-5 80EAh Comunicación módulo - unidad básica Fijo [8]
Causa – Error de contador de paquetes en la transmisión μC1<-� μC2.
– Error en suma de prueba en la transmisión μC1 <-� μC2.
Medida � Avería interna en el controlador de motor.� Comprobar si las revisiones del firmware en el módulo de
seguridad, la unidad básica y la versión de revisión del pluginde FCT y del SafetyTool son compatibles.
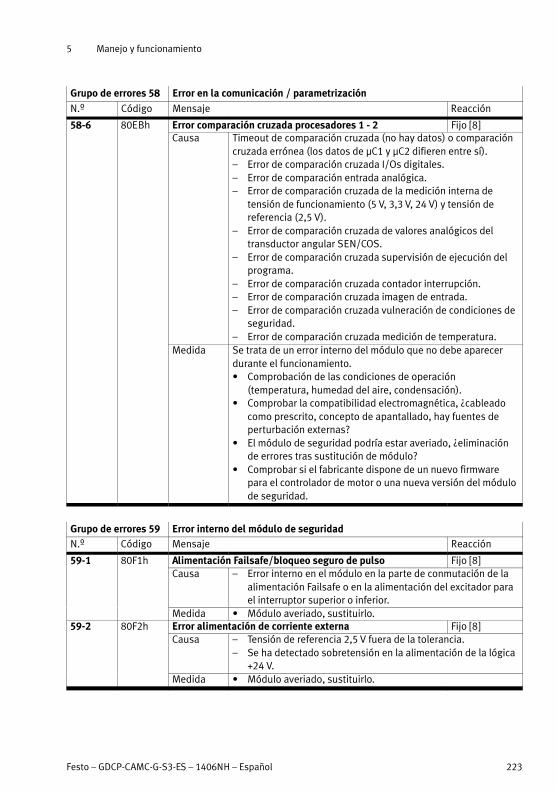
5 Manejo y funcionamiento
Festo – GDCP-CAMC-G-S3-ES – 1406NH – Español 223
Grupo de errores 58 Error en la comunicación / parametrización
N.º ReacciónMensajeCódigo
58-6 80EBh Error comparación cruzada procesadores 1 - 2 Fijo [8]Causa Timeout de comparación cruzada (no hay datos) o comparación
cruzada errónea (los datos de μC1 y μC2 difieren entre sí).– Error de comparación cruzada I/Os digitales.– Error de comparación entrada analógica.– Error de comparación cruzada de la medición interna de
tensión de funcionamiento (5 V, 3,3 V, 24 V) y tensión dereferencia (2,5 V).
– Error de comparación cruzada de valores analógicos deltransductor angular SEN/COS.
– Error de comparación cruzada supervisión de ejecución delprograma.
– Error de comparación cruzada contador interrupción.– Error de comparación cruzada imagen de entrada.– Error de comparación cruzada vulneración de condiciones de
seguridad.– Error de comparación cruzada medición de temperatura.
Medida Se trata de un error interno del módulo que no debe aparecerdurante el funcionamiento.� Comprobación de las condiciones de operación
(temperatura, humedad del aire, condensación).� Comprobar la compatibilidad electromagnética, ¿cableado
como prescrito, concepto de apantallado, hay fuentes deperturbación externas?
� El módulo de seguridad podría estar averiado, ¿eliminaciónde errores tras sustitución de módulo?
� Comprobar si el fabricante dispone de un nuevo firmwarepara el controlador de motor o una nueva versión del módulode seguridad.
Grupo de errores 59 Error interno del módulo de seguridadN.º Código Mensaje Reacción
59-1 80F1h Alimentación Failsafe/bloqueo seguro de pulso Fijo [8]Causa – Error interno en el módulo en la parte de conmutación de la
alimentación Failsafe o en la alimentación del excitador parael interruptor superior o inferior.
Medida � Módulo averiado, sustituirlo.59-2 80F2h Error alimentación de corriente externa Fijo [8]
Causa – Tensión de referencia 2,5 V fuera de la tolerancia.– Se ha detectado sobretensión en la alimentación de la lógica
+24 V.Medida � Módulo averiado, sustituirlo.
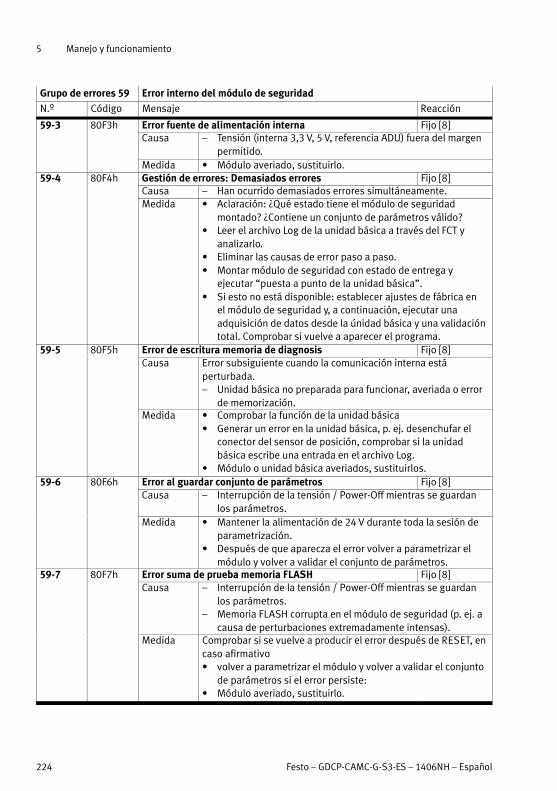
5 Manejo y funcionamiento
224 Festo – GDCP-CAMC-G-S3-ES – 1406NH – Español
Grupo de errores 59 Error interno del módulo de seguridad
N.º ReacciónMensajeCódigo
59-3 80F3h Error fuente de alimentación interna Fijo [8]Causa – Tensión (interna 3,3 V, 5 V, referencia ADU) fuera del margen
permitido.Medida � Módulo averiado, sustituirlo.
59-4 80F4h Gestión de errores: Demasiados errores Fijo [8]Causa – Han ocurrido demasiados errores simultáneamente.Medida � Aclaración: ¿Qué estado tiene el módulo de seguridad
montado? ¿Contiene un conjunto de parámetros válido?� Leer el archivo Log de la unidad básica a través del FCT y
analizarlo.� Eliminar las causas de error paso a paso.� Montar módulo de seguridad con estado de entrega y
ejecutar “puesta a punto de la unidad básica”.� Si esto no está disponible: establecer ajustes de fábrica en
el módulo de seguridad y, a continuación, ejecutar unaadquisición de datos desde la únidad básica y una validacióntotal. Comprobar si vuelve a aparecer el programa.
59-5 80F5h Error de escritura memoria de diagnosis Fijo [8]Causa Error subsiguiente cuando la comunicación interna está
perturbada.– Unidad básica no preparada para funcionar, averiada o error
de memorización.Medida � Comprobar la función de la unidad básica
� Generar un error en la unidad básica, p. ej. desenchufar elconector del sensor de posición, comprobar si la unidadbásica escribe una entrada en el archivo Log.
� Módulo o unidad básica averiados, sustituirlos.59-6 80F6h Error al guardar conjunto de parámetros Fijo [8]
Causa – Interrupción de la tensión / Power-Off mientras se guardanlos parámetros.
Medida � Mantener la alimentación de 24 V durante toda la sesión deparametrización.
� Después de que aparecza el error volver a parametrizar elmódulo y volver a validar el conjunto de parámetros.
59-7 80F7h Error suma de prueba memoria FLASH Fijo [8]Causa – Interrupción de la tensión / Power-Off mientras se guardan
los parámetros.– Memoria FLASH corrupta en el módulo de seguridad (p. ej. a
causa de perturbaciones extremadamente intensas).Medida Comprobar si se vuelve a producir el error después de RESET, en
caso afirmativo� volver a parametrizar el módulo y volver a validar el conjunto
de parámetros si el error persiste:� Módulo averiado, sustituirlo.
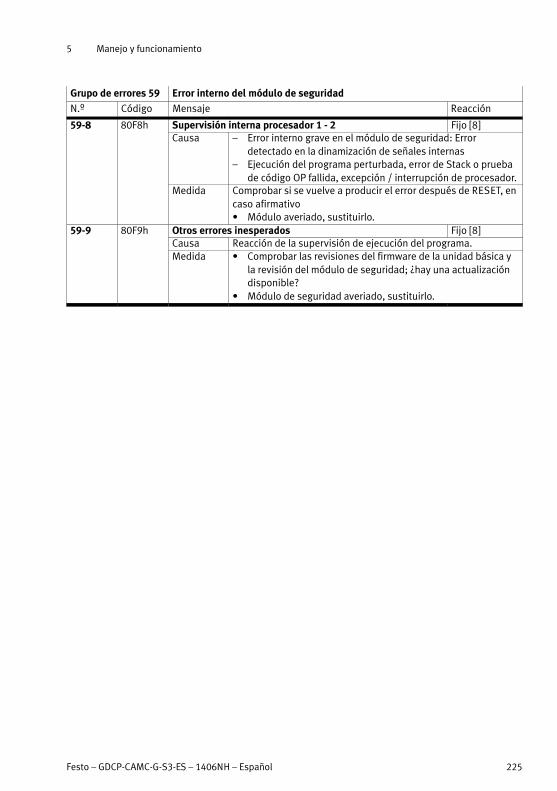
5 Manejo y funcionamiento
Festo – GDCP-CAMC-G-S3-ES – 1406NH – Español 225
Grupo de errores 59 Error interno del módulo de seguridad
N.º ReacciónMensajeCódigo
59-8 80F8h Supervisión interna procesador 1 - 2 Fijo [8]Causa – Error interno grave en el módulo de seguridad: Error
detectado en la dinamización de señales internas– Ejecución del programa perturbada, error de Stack o prueba
de código OP fallida, excepción / interrupción de procesador.Medida Comprobar si se vuelve a producir el error después de RESET, en
caso afirmativo� Módulo averiado, sustituirlo.
59-9 80F9h Otros errores inesperados Fijo [8]Causa Reacción de la supervisión de ejecución del programa.Medida � Comprobar las revisiones del firmware de la unidad básica y
la revisión del módulo de seguridad; ¿hay una actualizacióndisponible?
� Módulo de seguridad averiado, sustituirlo.
6 Mantenimiento, reparación, sustitución, eliminación
226 Festo – GDCP-CAMC-G-S3-ES – 1406NH – Español
6 Mantenimiento, reparación, sustitución, eliminación
6.1 Mantenimiento
El módulo de seguridad no contiene piezas que requieran mantenimiento.
6.2 Reparación
No está permitido realizar reparaciones en el módulo de seguridad. Si es necesario, cam
bie el módulo de seguridad completo.
� En caso de avería interna es necesario cambiar el módulo de seguridad.
� Envíe a Festo el módulo de seguridad averiado no modificado, incluyendo una descripción del fallo y
del caso de aplicación para realizar un análisis.
� Póngase en contacto con su comercial técnico para averiguar las modalidades de envío posibles.
6.3 Sustitución del módulo de seguridad
En caso de que un módulo de seguridad falle y deba ser sustituido, es necesario tomar medidas
organizativas para garantizar la seguridad. Esto requiere:
– que el módulo de seguridad no sea sustituido por otro tipo de módulo sin funcionalidad de
seguridad (módulo de microinterruptores).
– que el módulo de seguridad no sea sustituido por otro tipo de módulo con un volumen de funciones
menor (CAMC-G-S3 por CAMC-G-S1).
– que el estado de revisión del módulo de seguridad nuevo coincida o sea compatible con el del
módulo de seguridad antiguo.
– que la parametrización del módulo de seguridad nuevo coincida con la parametrización del módulo
de seguridad averiado.
El código del producto del módulo de seguridad y la versión de revisión figuran en la
placa de características � Tab. 1, página 9.
Observe las medidas organizativas necesarias para evitar fallos en relación con la sustitución del
módulo.
Por ejemplo, dado que el número de serie del módulo de seguridad es distinto y el código de validación
es nuevo, en cualquier caso deberá elaborar un nuevo informe de validación.
6 Mantenimiento, reparación, sustitución, eliminación
Festo – GDCP-CAMC-G-S3-ES – 1406NH – Español 227
6.3.1 Desmontaje y montajeAntes de la sustitución del módulo es necesario comprobar la compatibilidad entre el módulo de
seguridad y la unidad básica, véase también � Sección “Versiones” en este documento.
Hallará información sobre el desmontaje y el montaje del módulo de seguridad en
Montaje y desmontaje del módulo de seguridad � Sección 3.1.
Consejo: Si el módulo de seguridad a sustituir se puede activar desde el SafetyTool, se recomienda
guardar un conjunto seguro de parámetros desde el estado real validado (iniciar SafetyTool en modo
Online, visualizar parametrización, después crear conjunto seguro de parámetros).
6.3.2 Aceptación del módulo de seguridad
Después de sustituir el módulo, es necesario volver a aceptar el nuevo módulo de seguridad en el
plugin de FCT para CMMP-AS.
Aceptar el número de serie del módulo de seguridad cambiado � Sección 4.3.4.
6.3.3 Nueva puesta a punto con el SafetyToolDespués de la aceptación del módulo de seguridad cambiado, debe transferir la parametrización
deseada al módulo de seguridad y validarla a continuación.
Hallará informaciones básicas en las siguientes secciones:
– SafetyTool � Sección 4.5
– Parametrización � Sección 4.4
– Comprobación del funcionamiento y validación � Sección4.8
Para ello, es necesario iniciar primero el SafetyTool en el modo Online.
Dependiendo de los datos disponibles del módulo de seguridad que se debe sustituir, existen las
siguientes opciones:
a) Está disponible un conjunto de parámetros seguro del módulo de seguridad que se debe sustituir:
� Abra el conjunto de parámetros en el SafetyTool y cárguelo en el módulo de seguridad. Para ello,
la información básica de la unidad básica debe coincidir con la contenida en el conjunto de
parámetros.
b) Existe un proyecto de SafetyTool guardado que corresponde a la parametrización:
� En caso necesario, restablezca los ajustes de fábrica del módulo de seguridad si este no se
encuentra en el estado de entrega.
� A continuación, abra el proyecto de SafetyTool.
� La información básica de la unidad básica tiene que coincidir. De lo contrario, es necesario
ajustarla.
� Después podrá validar las páginas de parámetros individuales y cargarlas en el módulo de
seguridad.
6 Mantenimiento, reparación, sustitución, eliminación
228 Festo – GDCP-CAMC-G-S3-ES – 1406NH – Español
c) No hay datos guardados disponibles del módulo de seguridad que se debe sustituir:
� En caso necesario, restablezca los ajustes de fábrica del módulo de seguridad si este no se
encuentra en el estado de entrega.
� A continuación proceda del mismo modo que en la primera puesta a punto.
Independientemente de la variante a), b) o c), es necesario volver a crear un informe de validación con
un nuevo código de validación y el nuevo número de serie del módulo de seguridad.
6.4 Puesta fuera de servicio y eliminación
Observe las indicaciones generales sobre el desmontaje del módulo de seguridad en la sección 3.1.
Eliminación
Observe las directivas locales relativas a la eliminación ecológica de módulos
electrónicos. El módulo de seguridad presenta conformidad con la directiva 2002/95/CE
(RoHS).
Los embalajes están diseñados para ser reciclados separándolos en función del material.
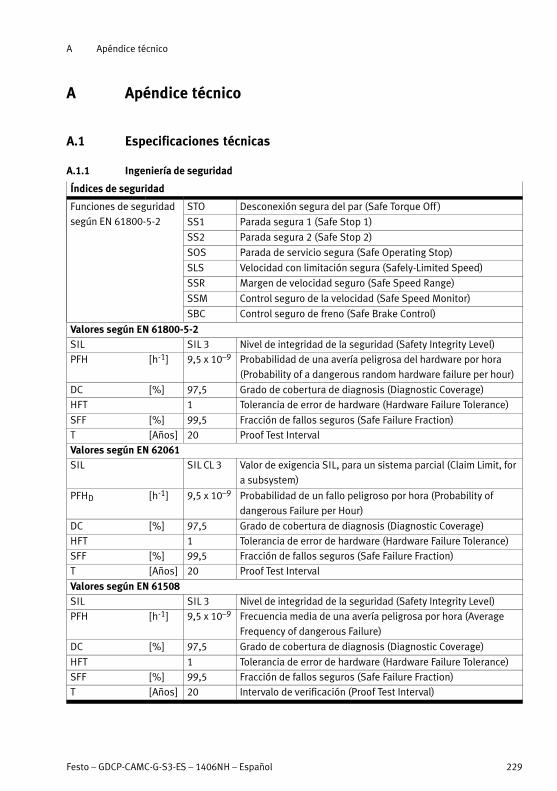
A Apéndice técnico
Festo – GDCP-CAMC-G-S3-ES – 1406NH – Español 229
A Apéndice técnico
A.1 Especificaciones técnicas
A.1.1 Ingeniería de seguridad
Índices de seguridad
Funciones de seguridad
según EN 61800-5-2
STO Desconexión segura del par (Safe Torque Off )
SS1 Parada segura 1 (Safe Stop 1)
SS2 Parada segura 2 (Safe Stop 2)
SOS Parada de servicio segura (Safe Operating Stop)
SLS Velocidad con limitación segura (Safely-Limited Speed)
SSR Margen de velocidad seguro (Safe Speed Range)
SSM Control seguro de la velocidad (Safe Speed Monitor)
SBC Control seguro de freno (Safe Brake Control)
Valores según EN 61800-5-2SIL SIL 3 Nivel de integridad de la seguridad (Safety Integrity Level)
PFH [h-1] 9,5 x 10–9 Probabilidad de una avería peligrosa del hardware por hora
(Probability of a dangerous random hardware failure per hour)
DC [%] 97,5 Grado de cobertura de diagnosis (Diagnostic Coverage)
HFT 1 Tolerancia de error de hardware (Hardware Failure Tolerance)
SFF [%] 99,5 Fracción de fallos seguros (Safe Failure Fraction)
T [Años] 20 Proof Test Interval
Valores según EN 62061SIL SIL CL 3 Valor de exigencia SIL, para un sistema parcial (Claim Limit, for
a subsystem)
PFHD [h-1] 9,5 x 10–9 Probabilidad de un fallo peligroso por hora (Probability of
dangerous Failure per Hour)
DC [%] 97,5 Grado de cobertura de diagnosis (Diagnostic Coverage)
HFT 1 Tolerancia de error de hardware (Hardware Failure Tolerance)
SFF [%] 99,5 Fracción de fallos seguros (Safe Failure Fraction)
T [Años] 20 Proof Test Interval
Valores según EN 61508SIL SIL 3 Nivel de integridad de la seguridad (Safety Integrity Level)
PFH [h-1] 9,5 x 10–9 Frecuencia media de una avería peligrosa por hora (Average
Frequency of dangerous Failure)
DC [%] 97,5 Grado de cobertura de diagnosis (Diagnostic Coverage)
HFT 1 Tolerancia de error de hardware (Hardware Failure Tolerance)
SFF [%] 99,5 Fracción de fallos seguros (Safe Failure Fraction)
T [Años] 20 Intervalo de verificación (Proof Test Interval)
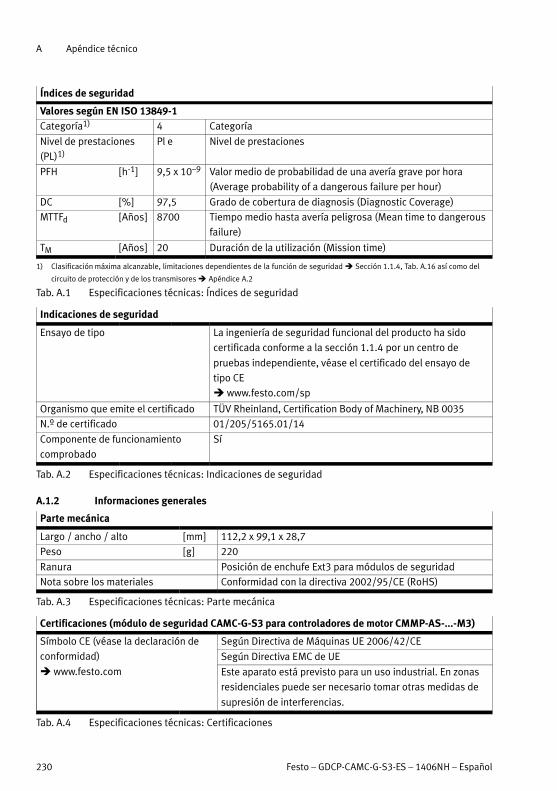
A Apéndice técnico
230 Festo – GDCP-CAMC-G-S3-ES – 1406NH – Español
Índices de seguridad
Valores según EN ISO 13849-1Categoría1) 4 Categoría
Nivel de prestaciones
(PL)1)Pl e Nivel de prestaciones
PFH [h-1] 9,5 x 10–9 Valor medio de probabilidad de una avería grave por hora
(Average probability of a dangerous failure per hour)
DC [%] 97,5 Grado de cobertura de diagnosis (Diagnostic Coverage)
MTTFd [Años] 8700 Tiempo medio hasta avería peligrosa (Mean time to dangerous
failure)
TM [Años] 20 Duración de la utilización (Mission time)
1) Clasificación máxima alcanzable, limitaciones dependientes de la función de seguridad � Sección 1.1.4, Tab. A.16 así como del
circuito de protección y de los transmisores � Apéndice A.2
Tab. A.1 Especificaciones técnicas: Índices de seguridad
Indicaciones de seguridad
Ensayo de tipo La ingeniería de seguridad funcional del producto ha sido
certificada conforme a la sección 1.1.4 por un centro de
pruebas independiente, véase el certificado del ensayo de
tipo CE
� www.festo.com/sp
Organismo que emite el certificado TÜV Rheinland, Certification Body of Machinery, NB 0035
N.º de certificado 01/205/5165.01/14
Componente de funcionamiento
comprobado
Sí
Tab. A.2 Especificaciones técnicas: Indicaciones de seguridad
A.1.2 Informaciones generales
Parte mecánica
Largo / ancho / alto [mm] 112,2 x 99,1 x 28,7
Peso [g] 220
Ranura Posición de enchufe Ext3 para módulos de seguridad
Nota sobre los materiales Conformidad con la directiva 2002/95/CE (RoHS)
Tab. A.3 Especificaciones técnicas: Parte mecánica
Certificaciones (módulo de seguridad CAMC-G-S3 para controladores de motor CMMP-AS-...-M3)
Símbolo CE (véase la declaración de
conformidad)
� www.festo.com
Según Directiva de Máquinas UE 2006/42/CE
Según Directiva EMC de UE
Este aparato está previsto para un uso industrial. En zonas
residenciales puede ser necesario tomar otras medidas de
supresión de interferencias.
Tab. A.4 Especificaciones técnicas: Certificaciones
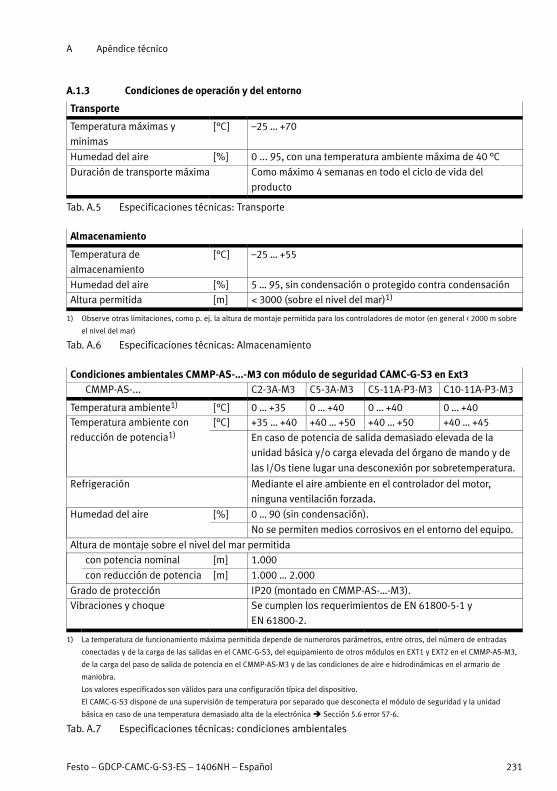
A Apéndice técnico
Festo – GDCP-CAMC-G-S3-ES – 1406NH – Español 231
A.1.3 Condiciones de operación y del entorno
Transporte
Temperatura máximas y
minimas
[°C] �25 … +70
Humedad del aire [%] 0 ... 95, con una temperatura ambiente máxima de 40 °C
Duración de transporte máxima Como máximo 4 semanas en todo el ciclo de vida del
producto
Tab. A.5 Especificaciones técnicas: Transporte
Almacenamiento
Temperatura de
almacenamiento
[°C] –25 … +55
Humedad del aire [%] 5 … 95, sin condensación o protegido contra condensación
Altura permitida [m] 3000 (sobre el nivel del mar)1)
1) Observe otras limitaciones, como p. ej. la altura de montaje permitida para los controladores de motor (en general < 2000 m sobre
el nivel del mar)
Tab. A.6 Especificaciones técnicas: Almacenamiento
Condiciones ambientales CMMP-AS-...-M3 con módulo de seguridad CAMCGS3 en Ext3 CMMP-AS-... C2-3A-M3 C5-3A-M3 C5-11A-P3-M3 C10-11A-P3-M3
Temperatura ambiente1) [°C] 0 … +35 0 … +40 0 … +40 0 … +40Temperatura ambiente con
reducción de potencia1)[°C] +35 … +40 +40 … +50 +40 … +50 +40 … +45
En caso de potencia de salida demasiado elevada de la
unidad básica y/o carga elevada del órgano de mando y de
las I/Os tiene lugar una desconexión por sobretemperatura.
Refrigeración Mediante el aire ambiente en el controlador del motor,
ninguna ventilación forzada.
Humedad del aire [%] 0 … 90 (sin condensación).
No se permiten medios corrosivos en el entorno del equipo.
Altura de montaje sobre el nivel del mar permitida
con potencia nominal [m] 1.000
con reducción de potencia [m] 1.000 … 2.000
Grado de protección IP20 (montado en CMMP-AS-…-M3).
Vibraciones y choque Se cumplen los requerimientos de EN 61800-5-1 y
EN 61800-2.
1) La temperatura de funcionamiento máxima permitida depende de numeroros parámetros, entre otros, del número de entradas
conectadas y de la carga de las salidas en el CAMC-G-S3, del equipamiento de otros módulos en EXT1 y EXT2 en el CMMP-AS-M3,
de la carga del paso de salida de potencia en el CMMP-AS-M3 y de las condiciones de aire e hidrodinámicas en el armario de
maniobra.
Los valores especificados son válidos para una configuración típica del dispositivo.
El CAMC-G-S3 dispone de una supervisión de temperatura por separado que desconecta el módulo de seguridad y la unidad
básica en caso de una temperatura demasiado alta de la electrónica � Sección 5.6 error 57-6.
Tab. A.7 Especificaciones técnicas: condiciones ambientales
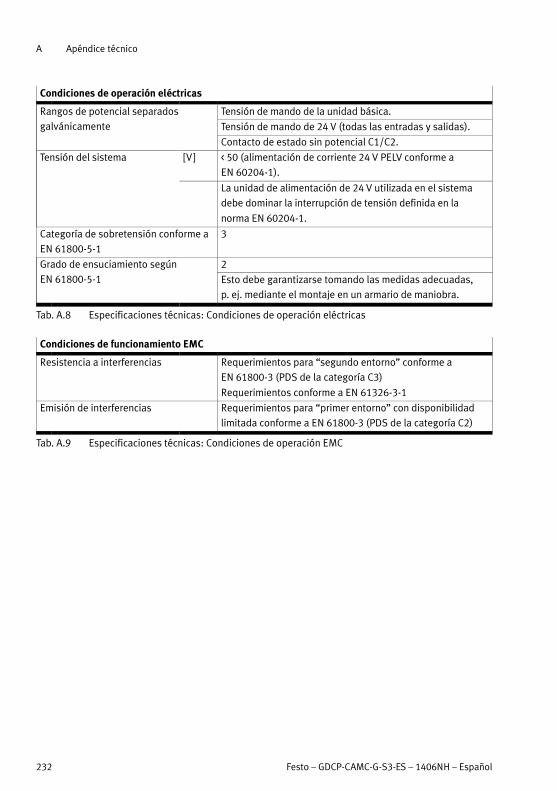
A Apéndice técnico
232 Festo – GDCP-CAMC-G-S3-ES – 1406NH – Español
Condiciones de operación eléctricas
Rangos de potencial separados
galvánicamente
Tensión de mando de la unidad básica.
Tensión de mando de 24 V (todas las entradas y salidas).
Contacto de estado sin potencial C1/C2.
Tensión del sistema [V] < 50 (alimentación de corriente 24 V PELV conforme a
EN 60204-1).
La unidad de alimentación de 24 V utilizada en el sistema
debe dominar la interrupción de tensión definida en la
norma EN 60204-1.
Categoría de sobretensión conforme a
EN 6180051
3
Grado de ensuciamiento según
EN 61800-5-1
2
Esto debe garantizarse tomando las medidas adecuadas,
p. ej. mediante el montaje en un armario de maniobra.
Tab. A.8 Especificaciones técnicas: Condiciones de operación eléctricas
Condiciones de funcionamiento EMC
Resistencia a interferencias Requerimientos para “segundo entorno” conforme a
EN 61800-3 (PDS de la categoría C3)
Requerimientos conforme a EN 61326-3-1
Emisión de interferencias Requerimientos para “primer entorno” con disponibilidad
limitada conforme a EN 61800-3 (PDS de la categoría C2)
Tab. A.9 Especificaciones técnicas: Condiciones de operación EMC
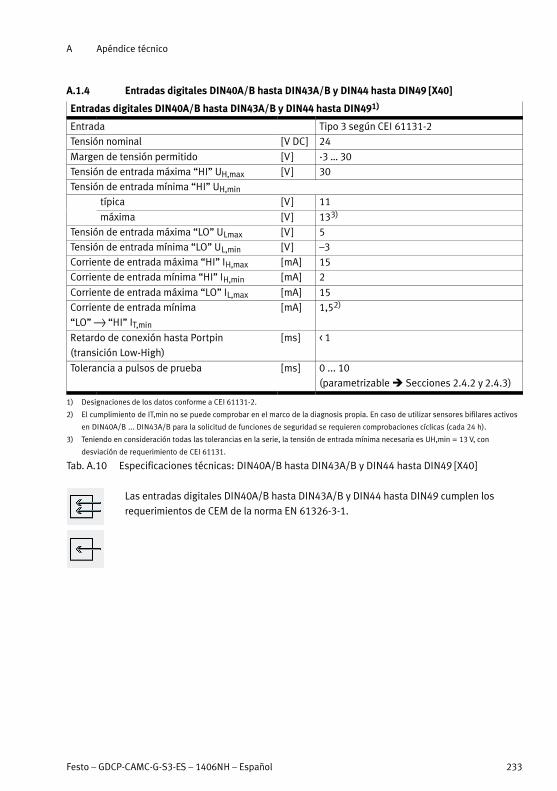
A Apéndice técnico
Festo – GDCP-CAMC-G-S3-ES – 1406NH – Español 233
A.1.4 Entradas digitales DIN40A/B hasta DIN43A/B y DIN44 hasta DIN49 [X40]
Entradas digitales DIN40A/B hasta DIN43A/B y DIN44 hasta DIN491)
Entrada Tipo 3 según CEI 61131-2
Tensión nominal [V DC] 24
Margen de tensión permitido [V] -3 … 30
Tensión de entrada máxima “HI” UH,max [V] 30
Tensión de entrada mínima “HI” UH,min
típica [V] 11
máxima [V] 133)
Tensión de entrada máxima “LO” ULmax [V] 5
Tensión de entrada mínima “LO” UL,min [V] –3
Corriente de entrada máxima “HI” IH,max [mA] 15
Corriente de entrada mínima “HI” IH,min [mA] 2
Corriente de entrada máxima “LO” IL,max [mA] 15
Corriente de entrada mínima
“LO” } “HI” IT,min
[mA] 1,52)
Retardo de conexión hasta Portpin
(transición LowHigh)
[ms] < 1
Tolerancia a pulsos de prueba [ms] 0 ... 10
(parametrizable � Secciones 2.4.2 y 2.4.3)
1) Designaciones de los datos conforme a CEI 61131-2.
2) El cumplimiento de IT,min no se puede comprobar en el marco de la diagnosis propia. En caso de utilizar sensores bifilares activos
en DIN40A/B ... DIN43A/B para la solicitud de funciones de seguridad se requieren comprobaciones cíclicas (cada 24 h).
3) Teniendo en consideración todas las tolerancias en la serie, la tensión de entrada mínima necesaria es UH,min = 13 V, con
desviación de requerimiento de CEI 61131.
Tab. A.10 Especificaciones técnicas: DIN40A/B hasta DIN43A/B y DIN44 hasta DIN49 [X40]
Las entradas digitales DIN40A/B hasta DIN43A/B y DIN44 hasta DIN49 cumplen los
requerimientos de CEM de la norma EN 6132631.
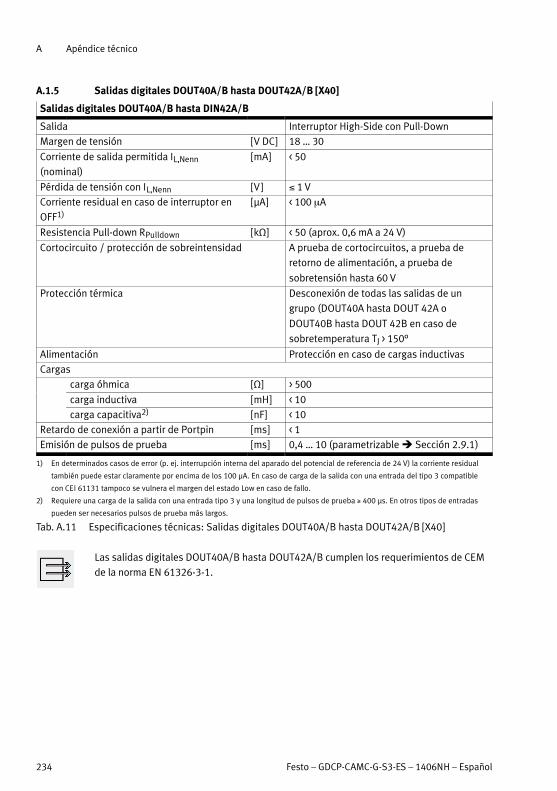
A Apéndice técnico
234 Festo – GDCP-CAMC-G-S3-ES – 1406NH – Español
A.1.5 Salidas digitales DOUT40A/B hasta DOUT42A/B [X40]
Salidas digitales DOUT40A/B hasta DIN42A/B
Salida Interruptor High-Side con Pull-Down
Margen de tensión [V DC] 18 … 30
Corriente de salida permitida IL,Nenn
(nominal)
[mA] < 50
Pérdida de tensión con IL,Nenn [V] 1 V
Corriente residual en caso de interruptor en
OFF1)[μA] < 100 A
Resistencia Pulldown RPulldown [kΩ] < 50 (aprox. 0,6 mA a 24 V)
Cortocircuito / protección de sobreintensidad A prueba de cortocircuitos, a prueba de
retorno de alimentación, a prueba de
sobretensión hasta 60 V
Protección térmica Desconexión de todas las salidas de un
grupo (DOUT40A hasta DOUT 42A o
DOUT40B hasta DOUT 42B en caso de
sobretemperatura TJ > 150°
Alimentación Protección en caso de cargas inductivas
Cargas
carga óhmica [Ω] > 500
carga inductiva [mH] < 10
carga capacitiva2) [nF] < 10
Retardo de conexión a partir de Portpin [ms] < 1
Emisión de pulsos de prueba [ms] 0,4 … 10 (parametrizable � Sección 2.9.1)
1) En determinados casos de error (p. ej. interrupción interna del aparado del potencial de referencia de 24 V) la corriente residual
también puede estar claramente por encima de los 100 μA. En caso de carga de la salida con una entrada del tipo 3 compatible
con CEI 61131 tampoco se vulnera el margen del estado Low en caso de fallo.
2) Requiere una carga de la salida con una entrada tipo 3 y una longitud de pulsos de prueba ≥ 400 μs. En otros tipos de entradas
pueden ser necesarios pulsos de prueba más largos.
Tab. A.11 Especificaciones técnicas: Salidas digitales DOUT40A/B hasta DOUT42A/B [X40]
Las salidas digitales DOUT40A/B hasta DOUT42A/B cumplen los requerimientos de CEM
de la norma EN 6132631.
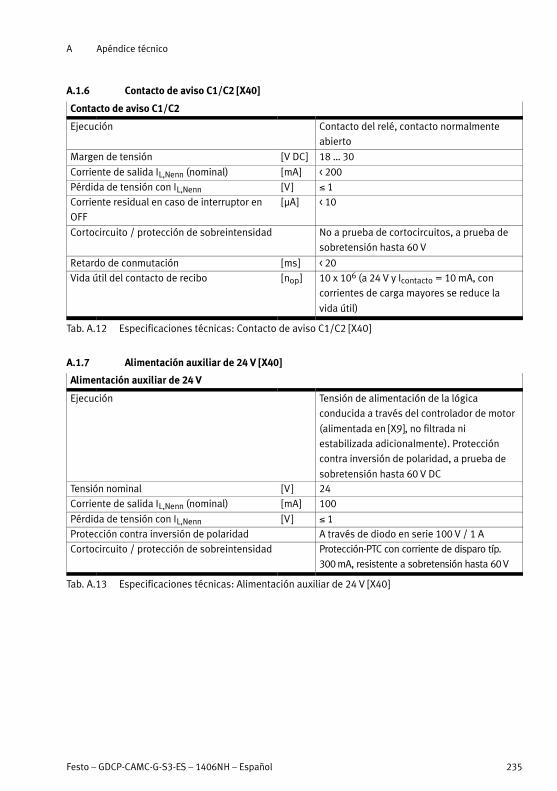
A Apéndice técnico
Festo – GDCP-CAMC-G-S3-ES – 1406NH – Español 235
A.1.6 Contacto de aviso C1/C2 [X40]
Contacto de aviso C1/C2
Ejecución Contacto del relé, contacto normalmente
abierto
Margen de tensión [V DC] 18 … 30
Corriente de salida IL,Nenn (nominal) [mA] < 200
Pérdida de tensión con IL,Nenn [V] 1
Corriente residual en caso de interruptor en
OFF
[μA] < 10
Cortocircuito / protección de sobreintensidad No a prueba de cortocircuitos, a prueba de
sobretensión hasta 60 V
Retardo de conmutación [ms] < 20
Vida útil del contacto de recibo [nop] 10 x 106 (a 24 V y Icontacto = 10 mA, con
corrientes de carga mayores se reduce la
vida útil)
Tab. A.12 Especificaciones técnicas: Contacto de aviso C1/C2 [X40]
A.1.7 Alimentación auxiliar de 24 V [X40]
Alimentación auxiliar de 24 V
Ejecución Tensión de alimentación de la lógica
conducida a través del controlador de motor
(alimentada en [X9], no filtrada ni
estabilizada adicionalmente). Protección
contra inversión de polaridad, a prueba de
sobretensión hasta 60 V DCTensión nominal [V] 24
Corriente de salida IL,Nenn (nominal) [mA] 100
Pérdida de tensión con IL,Nenn [V] 1
Protección contra inversión de polaridad A través de diodo en serie 100 V / 1 A
Cortocircuito / protección de sobreintensidad ProtecciónPTC con corriente de disparo típ.
300 mA, resistente a sobretensión hasta 60 V
Tab. A.13 Especificaciones técnicas: Alimentación auxiliar de 24 V [X40]
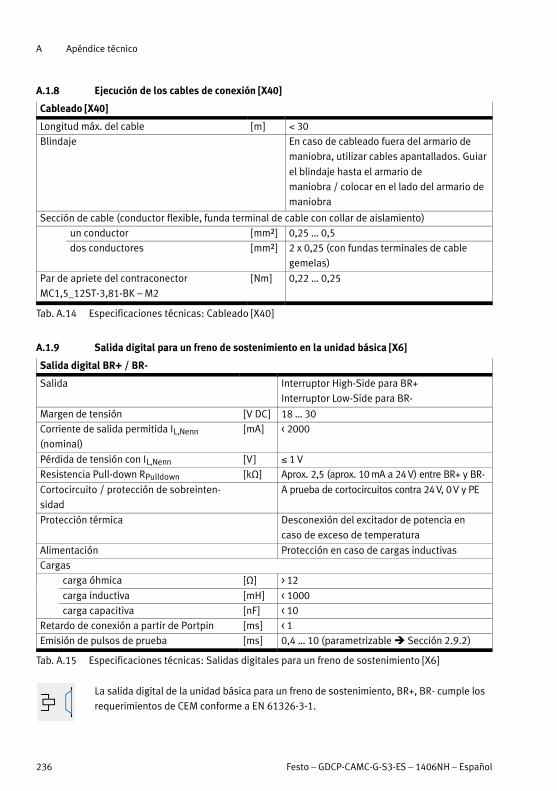
A Apéndice técnico
236 Festo – GDCP-CAMC-G-S3-ES – 1406NH – Español
A.1.8 Ejecución de los cables de conexión [X40]
Cableado [X40]
Longitud máx. del cable [m] 30
Blindaje En caso de cableado fuera del armario de
maniobra, utilizar cables apantallados. Guiar
el blindaje hasta el armario de
maniobra / colocar en el lado del armario de
maniobra
Sección de cable (conductor flexible, funda terminal de cable con collar de aislamiento)
un conductor [mm²] 0,25 … 0,5
dos conductores [mm²] 2 x 0,25 (con fundas terminales de cable
gemelas)
Par de apriete del contraconector
MC1,5_12ST3,81BK – M2
[Nm] 0,22 … 0,25
Tab. A.14 Especificaciones técnicas: Cableado [X40]
A.1.9 Salida digital para un freno de sostenimiento en la unidad básica [X6]
Salida digital BR+ / BR-
Salida Interruptor High-Side para BR+
Interruptor LowSide para BR-
Margen de tensión [V DC] 18 … 30
Corriente de salida permitida IL,Nenn
(nominal)
[mA] < 2000
Pérdida de tensión con IL,Nenn [V] 1 V
Resistencia Pulldown RPulldown [kΩ] Aprox. 2,5 (aprox. 10 mA a 24 V) entre BR+ y BR-
Cortocircuito / protección de sobreinten
sidad
A prueba de cortocircuitos contra 24 V, 0 V y PE
Protección térmica Desconexión del excitador de potencia en
caso de exceso de temperatura
Alimentación Protección en caso de cargas inductivas
Cargas
carga óhmica [Ω] > 12
carga inductiva [mH] < 1000
carga capacitiva [nF] < 10
Retardo de conexión a partir de Portpin [ms] < 1
Emisión de pulsos de prueba [ms] 0,4 … 10 (parametrizable � Sección 2.9.2)
Tab. A.15 Especificaciones técnicas: Salidas digitales para un freno de sostenimiento [X6]
La salida digital de la unidad básica para un freno de sostenimiento, BR+, BR- cumple los
requerimientos de CEM conforme a EN 6132631.
A Apéndice técnico
Festo – GDCP-CAMC-G-S3-ES – 1406NH – Español 237
NotaEn el estado de entrega del módulo de seguridad, la función SBC en combinación con la
salida [X6] siempre está configurada, incluso si no se desea utilizar la función SBC.
En aplicaciones en las que los cables de control de freno se conducen en el cable del
motor, si no hay ningún freno de sostenimiento conectado en el lado de motor puede
haber perturbaciones de acoplamiento en los cables abiertos de frenos, de manera que
el módulo de seguridad comunica el error 57-0.
� En tales casos se deben fijar los cables de control de freno a X6 y conectarlos a PE.
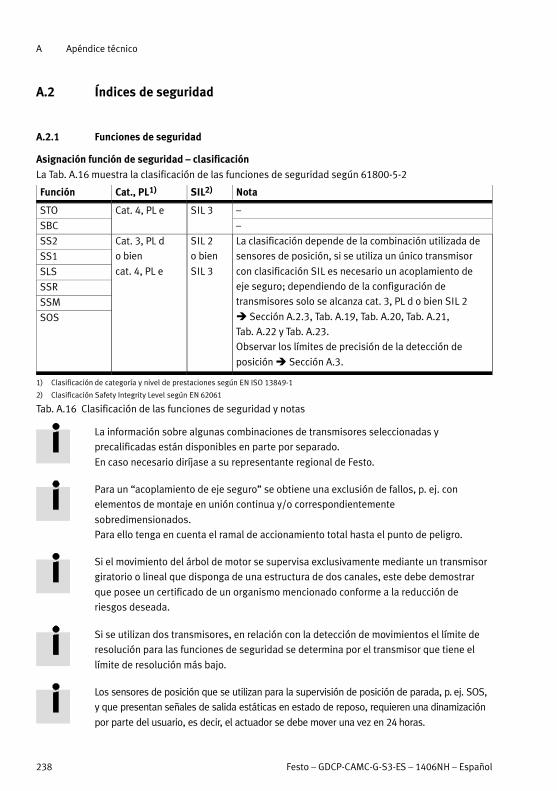
A Apéndice técnico
238 Festo – GDCP-CAMC-G-S3-ES – 1406NH – Español
A.2 Índices de seguridad
A.2.1 Funciones de seguridad
Asignación función de seguridad – clasificación
La Tab. A.16 muestra la clasificación de las funciones de seguridad según 61800-5-2
Función Cat., PL1) SIL2) Nota
STO Cat. 4, PL e SIL 3 –
SBC –
SS2 Cat. 3, PL d
o bien
cat. 4, PL e
SIL 2
o bien
SIL 3
La clasificación depende de la combinación utilizada de
sensores de posición, si se utiliza un único transmisor
con clasificación SIL es necesario un acoplamiento de
eje seguro; dependiendo de la configuración de
transmisores solo se alcanza cat. 3, PL d o bien SIL 2
� Sección A.2.3, Tab. A.19, Tab. A.20, Tab. A.21,
Tab. A.22 y Tab. A.23.
Observar los límites de precisión de la detección de
posición � Sección A.3.
SS1
SLS
SSR
SSM
SOS
1) Clasificación de categoría y nivel de prestaciones según EN ISO 13849-1
2) Clasificación Safety Integrity Level según EN 62061
Tab. A.16 Clasificación de las funciones de seguridad y notas
La información sobre algunas combinaciones de transmisores seleccionadas y
precalificadas están disponibles en parte por separado.
En caso necesario diríjase a su representante regional de Festo.
Para un “acoplamiento de eje seguro” se obtiene una exclusión de fallos, p. ej. con
elementos de montaje en unión continua y/o correspondientemente
sobredimensionados.
Para ello tenga en cuenta el ramal de accionamiento total hasta el punto de peligro.
Si el movimiento del árbol de motor se supervisa exclusivamente mediante un transmisor
giratorio o lineal que disponga de una estructura de dos canales, este debe demostrar
que posee un certificado de un organismo mencionado conforme a la reducción de
riesgos deseada.
Si se utilizan dos transmisores, en relación con la detección de movimientos el límite de
resolución para las funciones de seguridad se determina por el transmisor que tiene el
límite de resolución más bajo.
Los sensores de posición que se utilizan para la supervisión de posición de parada, p. ej. SOS,
y que presentan señales de salida estáticas en estado de reposo, requieren una dinamización
por parte del usuario, es decir, el actuador se debe mover una vez en 24 horas.
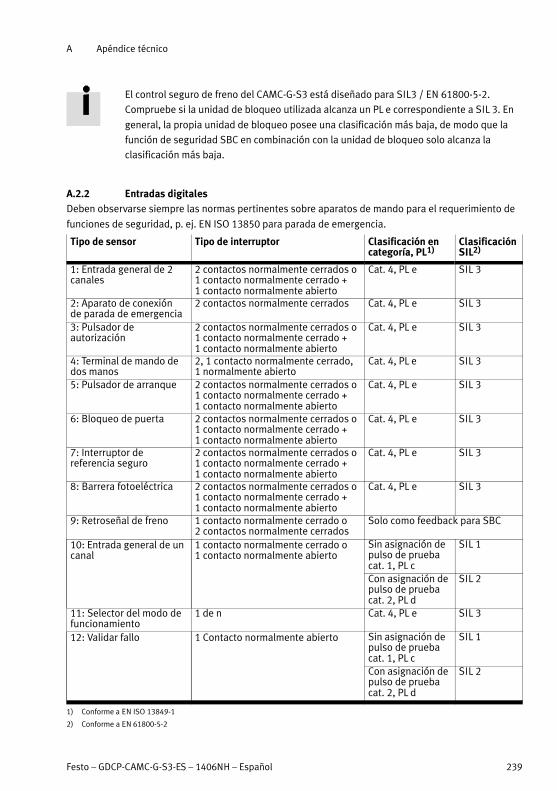
A Apéndice técnico
Festo – GDCP-CAMC-G-S3-ES – 1406NH – Español 239
El control seguro de freno del CAMC-G-S3 está diseñado para SIL3 / EN 61800-5-2.
Compruebe si la unidad de bloqueo utilizada alcanza un PL e correspondiente a SIL 3. En
general, la propia unidad de bloqueo posee una clasificación más baja, de modo que la
función de seguridad SBC en combinación con la unidad de bloqueo solo alcanza la
clasificación más baja.
A.2.2 Entradas digitalesDeben observarse siempre las normas pertinentes sobre aparatos de mando para el requerimiento de
funciones de seguridad, p. ej. EN ISO 13850 para parada de emergencia.
Tipo de sensor Tipo de interruptor Clasificación encategoría, PL1)
ClasificaciónSIL2)
1: Entrada general de 2canales
2 contactos normalmente cerrados o1 contacto normalmente cerrado +1 contacto normalmente abierto
Cat. 4, PL e SIL 3
2: Aparato de conexiónde parada de emergencia
2 contactos normalmente cerrados Cat. 4, PL e SIL 3
3: Pulsador deautorización
2 contactos normalmente cerrados o1 contacto normalmente cerrado +1 contacto normalmente abierto
Cat. 4, PL e SIL 3
4: Terminal de mando dedos manos
2, 1 contacto normalmente cerrado,1 normalmente abierto
Cat. 4, PL e SIL 3
5: Pulsador de arranque 2 contactos normalmente cerrados o1 contacto normalmente cerrado +1 contacto normalmente abierto
Cat. 4, PL e SIL 3
6: Bloqueo de puerta 2 contactos normalmente cerrados o1 contacto normalmente cerrado +1 contacto normalmente abierto
Cat. 4, PL e SIL 3
7: Interruptor dereferencia seguro
2 contactos normalmente cerrados o1 contacto normalmente cerrado +1 contacto normalmente abierto
Cat. 4, PL e SIL 3
8: Barrera fotoeléctrica 2 contactos normalmente cerrados o1 contacto normalmente cerrado +1 contacto normalmente abierto
Cat. 4, PL e SIL 3
9: Retroseñal de freno 1 contacto normalmente cerrado o 2 contactos normalmente cerrados
Solo como feedback para SBC
10: Entrada general de uncanal
1 contacto normalmente cerrado o1 contacto normalmente abierto
Sin asignación depulso de pruebacat. 1, PL c
SIL 1
Con asignación depulso de pruebacat. 2, PL d
SIL 2
11: Selector del modo defuncionamiento
1 de n Cat. 4, PL e SIL 3
12: Validar fallo 1 Contacto normalmente abierto Sin asignación depulso de pruebacat. 1, PL c
SIL 1
Con asignación depulso de pruebacat. 2, PL d
SIL 2
1) Conforme a EN ISO 13849-1
2) Conforme a EN 61800-5-2
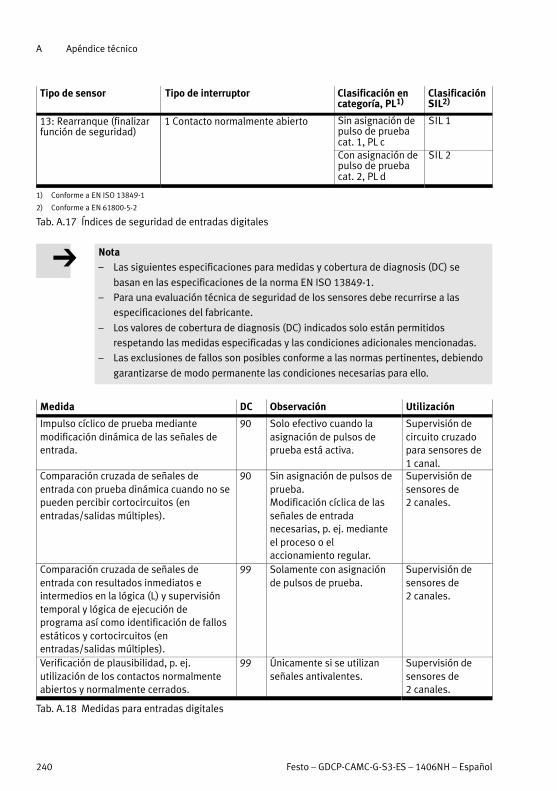
A Apéndice técnico
240 Festo – GDCP-CAMC-G-S3-ES – 1406NH – Español
Tipo de sensor ClasificaciónSIL2)
Clasificación encategoría, PL1)
Tipo de interruptor
13: Rearranque (finalizarfunción de seguridad)
1 Contacto normalmente abierto Sin asignación depulso de pruebacat. 1, PL c
SIL 1
Con asignación depulso de pruebacat. 2, PL d
SIL 2
1) Conforme a EN ISO 13849-1
2) Conforme a EN 61800-5-2
Tab. A.17 Índices de seguridad de entradas digitales
Nota– Las siguientes especificaciones para medidas y cobertura de diagnosis (DC) se
basan en las especificaciones de la norma EN ISO 13849-1.
– Para una evaluación técnica de seguridad de los sensores debe recurrirse a las
especificaciones del fabricante.
– Los valores de cobertura de diagnosis (DC) indicados solo están permitidos
respetando las medidas especificadas y las condiciones adicionales mencionadas.
– Las exclusiones de fallos son posibles conforme a las normas pertinentes, debiendo
garantizarse de modo permanente las condiciones necesarias para ello.
Medida DC Observación Utilización
Impulso cíclico de prueba mediantemodificación dinámica de las señales deentrada.
90 Solo efectivo cuando laasignación de pulsos deprueba está activa.
Supervisión decircuito cruzadopara sensores de1 canal.
Comparación cruzada de señales deentrada con prueba dinámica cuando no sepueden percibir cortocircuitos (enentradas/salidas múltiples).
90 Sin asignación de pulsos deprueba.Modificación cíclica de lasseñales de entradanecesarias, p. ej. medianteel proceso o elaccionamiento regular.
Supervisión desensores de2 canales.
Comparación cruzada de señales deentrada con resultados inmediatos eintermedios en la lógica (L) y supervisióntemporal y lógica de ejecución deprograma así como identificación de fallosestáticos y cortocircuitos (enentradas/salidas múltiples).
99 Solamente con asignaciónde pulsos de prueba.
Supervisión desensores de2 canales.
Verificación de plausibilidad, p. ej.utilización de los contactos normalmenteabiertos y normalmente cerrados.
99 Únicamente si se utilizanseñales antivalentes.
Supervisión desensores de2 canales.
Tab. A.18 Medidas para entradas digitales
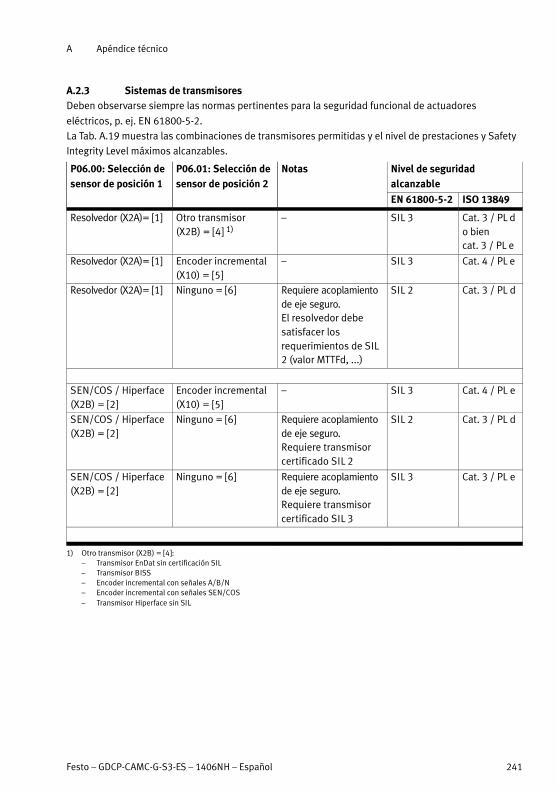
A Apéndice técnico
Festo – GDCP-CAMC-G-S3-ES – 1406NH – Español 241
A.2.3 Sistemas de transmisoresDeben observarse siempre las normas pertinentes para la seguridad funcional de actuadores
eléctricos, p. ej. EN 61800-5-2.
La Tab. A.19 muestra las combinaciones de transmisores permitidas y el nivel de prestaciones y Safety
Integrity Level máximos alcanzables.
P06.00: Selección desensor de posición 1
P06.01: Selección desensor de posición 2
Notas Nivel de seguridadalcanzable
EN 61800-5-2 ISO 13849
Resolvedor (X2A)= [1] Otro transmisor(X2B) = [4] 1)
– SIL 3 Cat. 3 / PL do bien cat. 3 / PL e
Resolvedor (X2A)= [1] Encoder incremental(X10) = [5]
– SIL 3 Cat. 4 / PL e
Resolvedor (X2A)= [1] Ninguno = [6] Requiere acoplamientode eje seguro.El resolvedor debesatisfacer losrequerimientos de SIL2 (valor MTTFd, ...)
SIL 2 Cat. 3 / PL d
SEN/COS / Hiperface(X2B) = [2]
Encoder incremental(X10) = [5]
– SIL 3 Cat. 4 / PL e
SEN/COS / Hiperface(X2B) = [2]
Ninguno = [6] Requiere acoplamientode eje seguro.Requiere transmisorcertificado SIL 2
SIL 2 Cat. 3 / PL d
SEN/COS / Hiperface(X2B) = [2]
Ninguno = [6] Requiere acoplamientode eje seguro.Requiere transmisorcertificado SIL 3
SIL 3 Cat. 3 / PL e
1) Otro transmisor (X2B) = [4]: – Transmisor EnDat sin certificación SIL– Transmisor BISS– Encoder incremental con señales A/B/N– Encoder incremental con señales SEN/COS– Transmisor Hiperface sin SIL
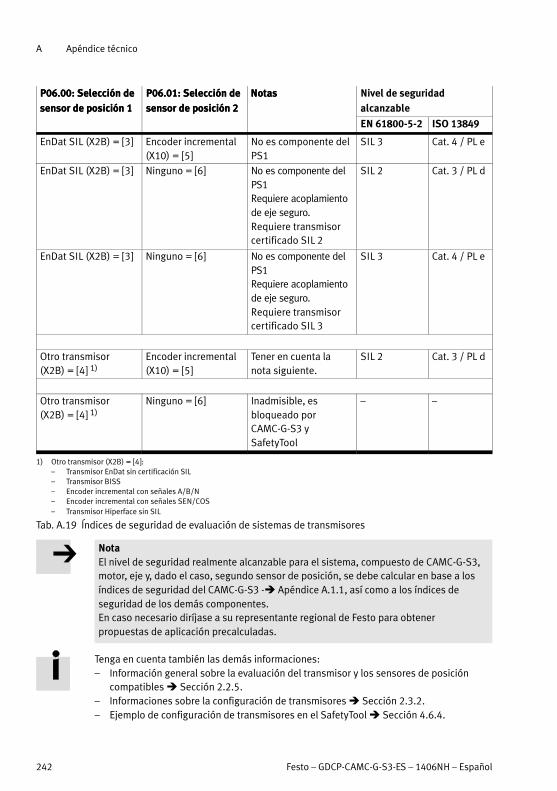
A Apéndice técnico
242 Festo – GDCP-CAMC-G-S3-ES – 1406NH – Español
P06.00: Selección desensor de posición 1
Nivel de seguridadalcanzable
NotasP06.01: Selección desensor de posición 2
P06.00: Selección desensor de posición 1
ISO 13849EN 61800-5-2
NotasP06.01: Selección desensor de posición 2
EnDat SIL (X2B) = [3] Encoder incremental(X10) = [5]
No es componente delPS1
SIL 3 Cat. 4 / PL e
EnDat SIL (X2B) = [3] Ninguno = [6] No es componente delPS1Requiere acoplamientode eje seguro.Requiere transmisorcertificado SIL 2
SIL 2 Cat. 3 / PL d
EnDat SIL (X2B) = [3] Ninguno = [6] No es componente delPS1Requiere acoplamientode eje seguro.Requiere transmisorcertificado SIL 3
SIL 3 Cat. 4 / PL e
Otro transmisor(X2B) = [4] 1)
Encoder incremental(X10) = [5]
Tener en cuenta lanota siguiente.
SIL 2 Cat. 3 / PL d
Otro transmisor(X2B) = [4] 1)
Ninguno = [6] Inadmisible, esbloqueado porCAMC-G-S3 ySafetyTool
– –
1) Otro transmisor (X2B) = [4]: – Transmisor EnDat sin certificación SIL– Transmisor BISS– Encoder incremental con señales A/B/N– Encoder incremental con señales SEN/COS– Transmisor Hiperface sin SIL
Tab. A.19 Índices de seguridad de evaluación de sistemas de transmisores
NotaEl nivel de seguridad realmente alcanzable para el sistema, compuesto de CAMCGS3,motor, eje y, dado el caso, segundo sensor de posición, se debe calcular en base a losíndices de seguridad del CAMCGS3 � Apéndice A.1.1, así como a los índices deseguridad de los demás componentes. En caso necesario diríjase a su representante regional de Festo para obtenerpropuestas de aplicación precalculadas.
Tenga en cuenta también las demás informaciones:– Información general sobre la evaluación del transmisor y los sensores de posición
compatibles � Sección 2.2.5.– Informaciones sobre la configuración de transmisores � Sección 2.3.2.– Ejemplo de configuración de transmisores en el SafetyTool � Sección 4.6.4.
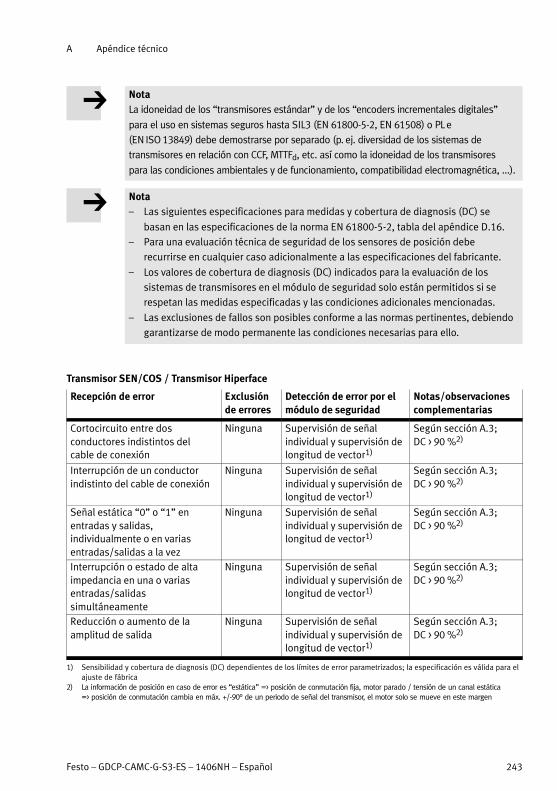
A Apéndice técnico
Festo – GDCP-CAMC-G-S3-ES – 1406NH – Español 243
NotaLa idoneidad de los “transmisores estándar” y de los “encoders incrementales digitales”
para el uso en sistemas seguros hasta SIL3 (EN 61800-5-2, EN 61508) o PL e
(EN ISO 13849) debe demostrarse por separado (p. ej. diversidad de los sistemas de
transmisores en relación con CCF, MTTFd, etc. así como la idoneidad de los transmisores
para las condiciones ambientales y de funcionamiento, compatibilidad electromagnética, ...).
Nota– Las siguientes especificaciones para medidas y cobertura de diagnosis (DC) se
basan en las especificaciones de la norma EN 61800-5-2, tabla del apéndice D.16.
– Para una evaluación técnica de seguridad de los sensores de posición debe
recurrirse en cualquier caso adicionalmente a las especificaciones del fabricante.
– Los valores de cobertura de diagnosis (DC) indicados para la evaluación de los
sistemas de transmisores en el módulo de seguridad solo están permitidos si se
respetan las medidas especificadas y las condiciones adicionales mencionadas.
– Las exclusiones de fallos son posibles conforme a las normas pertinentes, debiendo
garantizarse de modo permanente las condiciones necesarias para ello.
Transmisor SEN/COS / Transmisor Hiperface
Recepción de error Exclusiónde errores
Detección de error por elmódulo de seguridad
Notas/observacionescomplementarias
Cortocircuito entre dosconductores indistintos delcable de conexión
Ninguna Supervisión de señalindividual y supervisión delongitud de vector1)
Según sección A.3; DC > 90 %2)
Interrupción de un conductorindistinto del cable de conexión
Ninguna Supervisión de señalindividual y supervisión delongitud de vector1)
Según sección A.3; DC > 90 %2)
Señal estática “0” o “1” enentradas y salidas,individualmente o en variasentradas/salidas a la vez
Ninguna Supervisión de señalindividual y supervisión delongitud de vector1)
Según sección A.3; DC > 90 %2)
Interrupción o estado de altaimpedancia en una o variasentradas/salidassimultáneamente
Ninguna Supervisión de señalindividual y supervisión delongitud de vector1)
Según sección A.3; DC > 90 %2)
Reducción o aumento de laamplitud de salida
Ninguna Supervisión de señalindividual y supervisión delongitud de vector1)
Según sección A.3; DC > 90 %2)
1) Sensibilidad y cobertura de diagnosis (DC) dependientes de los límites de error parametrizados; la especificación es válida para elajuste de fábrica
2) La información de posición en caso de error es “estática” => posición de conmutación fija, motor parado / tensión de un canal estática => posición de conmutación cambia en máx. +/-90° de un periodo de señal del transmisor, el motor solo se mueve en este margen
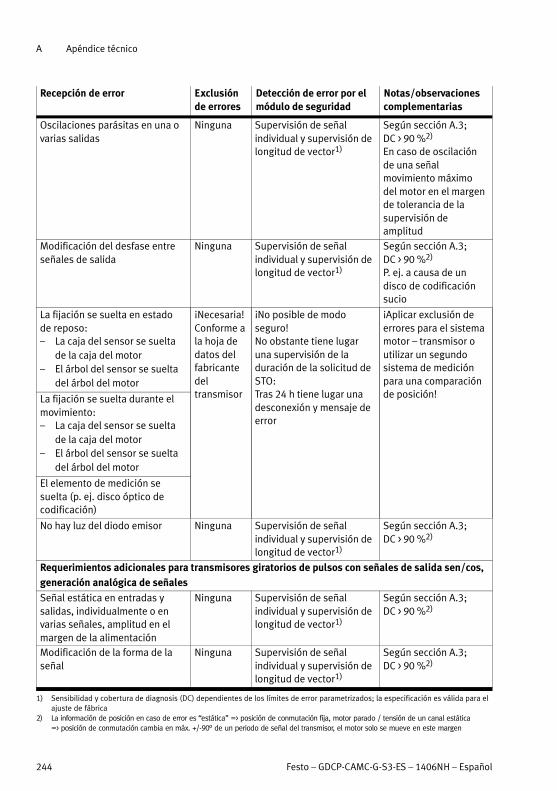
A Apéndice técnico
244 Festo – GDCP-CAMC-G-S3-ES – 1406NH – Español
Recepción de error Notas/observacionescomplementarias
Detección de error por elmódulo de seguridad
Exclusiónde errores
Oscilaciones parásitas en una ovarias salidas
Ninguna Supervisión de señalindividual y supervisión delongitud de vector1)
Según sección A.3; DC > 90 %2)
En caso de oscilaciónde una señalmovimiento máximodel motor en el margende tolerancia de lasupervisión deamplitud
Modificación del desfase entreseñales de salida
Ninguna Supervisión de señalindividual y supervisión delongitud de vector1)
Según sección A.3; DC > 90 %2)
P. ej. a causa de undisco de codificaciónsucio
La fijación se suelta en estadode reposo:– La caja del sensor se suelta
de la caja del motor– El árbol del sensor se suelta
del árbol del motor
¡Necesaria!Conforme ala hoja dedatos delfabricantedeltransmisor
¡No posible de modoseguro!No obstante tiene lugaruna supervisión de laduración de la solicitud deSTO:Tras 24 h tiene lugar unadesconexión y mensaje deerror
¡Aplicar exclusión deerrores para el sistemamotor – transmisor outilizar un segundosistema de mediciónpara una comparaciónde posición!La fijación se suelta durante el
movimiento:– La caja del sensor se suelta
de la caja del motor– El árbol del sensor se suelta
del árbol del motor
El elemento de medición sesuelta (p. ej. disco óptico decodificación)
No hay luz del diodo emisor Ninguna Supervisión de señalindividual y supervisión delongitud de vector1)
Según sección A.3; DC > 90 %2)
Requerimientos adicionales para transmisores giratorios de pulsos con señales de salida sen/cos,generación analógica de señales
Señal estática en entradas ysalidas, individualmente o envarias señales, amplitud en elmargen de la alimentación
Ninguna Supervisión de señalindividual y supervisión delongitud de vector1)
Según sección A.3; DC > 90 %2)
Modificación de la forma de laseñal
Ninguna Supervisión de señalindividual y supervisión delongitud de vector1)
Según sección A.3; DC > 90 %2)
1) Sensibilidad y cobertura de diagnosis (DC) dependientes de los límites de error parametrizados; la especificación es válida para elajuste de fábrica
2) La información de posición en caso de error es “estática” => posición de conmutación fija, motor parado / tensión de un canal estática => posición de conmutación cambia en máx. +/-90° de un periodo de señal del transmisor, el motor solo se mueve en este margen
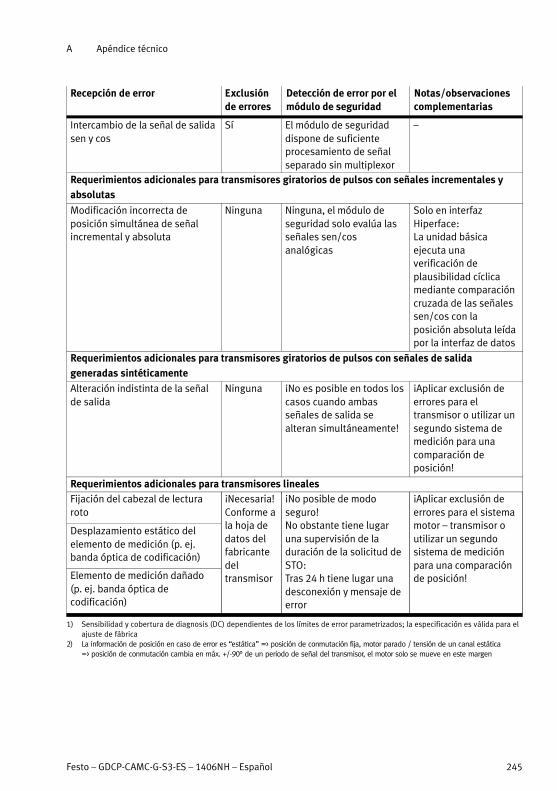
A Apéndice técnico
Festo – GDCP-CAMC-G-S3-ES – 1406NH – Español 245
Recepción de error Notas/observacionescomplementarias
Detección de error por elmódulo de seguridad
Exclusiónde errores
Intercambio de la señal de salidasen y cos
Sí El módulo de seguridaddispone de suficienteprocesamiento de señalseparado sin multiplexor
–
Requerimientos adicionales para transmisores giratorios de pulsos con señales incrementales yabsolutas
Modificación incorrecta deposición simultánea de señalincremental y absoluta
Ninguna Ninguna, el módulo deseguridad solo evalúa lasseñales sen/cosanalógicas
Solo en interfazHiperface:La unidad básicaejecuta unaverificación deplausibilidad cíclicamediante comparacióncruzada de las señalessen/cos con laposición absoluta leídapor la interfaz de datos
Requerimientos adicionales para transmisores giratorios de pulsos con señales de salidageneradas sintéticamente
Alteración indistinta de la señalde salida
Ninguna ¡No es posible en todos loscasos cuando ambasseñales de salida sealteran simultáneamente!
¡Aplicar exclusión deerrores para eltransmisor o utilizar unsegundo sistema demedición para unacomparación deposición!
Requerimientos adicionales para transmisores linealesFijación del cabezal de lecturaroto
¡Necesaria!Conforme ala hoja dedatos delfabricantedeltransmisor
¡No posible de modoseguro!No obstante tiene lugaruna supervisión de laduración de la solicitud deSTO:Tras 24 h tiene lugar unadesconexión y mensaje deerror
¡Aplicar exclusión deerrores para el sistemamotor – transmisor outilizar un segundosistema de mediciónpara una comparaciónde posición!
Desplazamiento estático delelemento de medición (p. ej.banda óptica de codificación)
Elemento de medición dañado(p. ej. banda óptica decodificación)
1) Sensibilidad y cobertura de diagnosis (DC) dependientes de los límites de error parametrizados; la especificación es válida para elajuste de fábrica
2) La información de posición en caso de error es “estática” => posición de conmutación fija, motor parado / tensión de un canal estática => posición de conmutación cambia en máx. +/-90° de un periodo de señal del transmisor, el motor solo se mueve en este margen
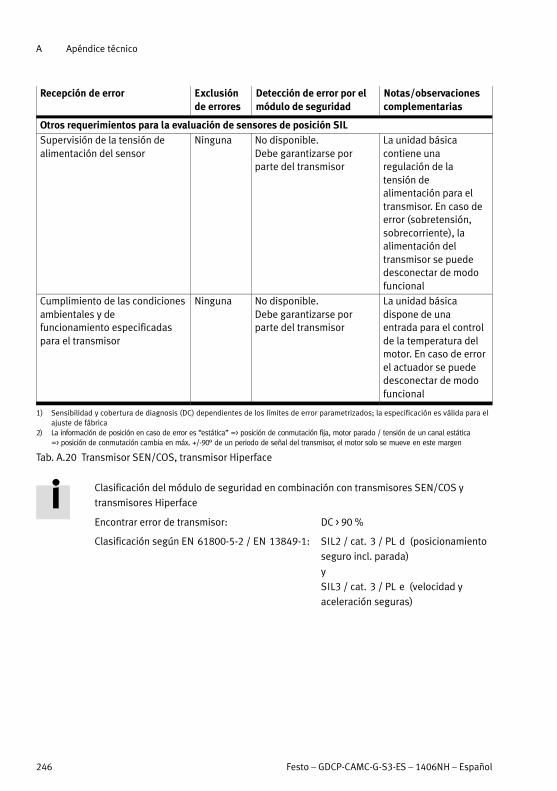
A Apéndice técnico
246 Festo – GDCP-CAMC-G-S3-ES – 1406NH – Español
Recepción de error Notas/observacionescomplementarias
Detección de error por elmódulo de seguridad
Exclusiónde errores
Otros requerimientos para la evaluación de sensores de posición SILSupervisión de la tensión dealimentación del sensor
Ninguna No disponible.Debe garantizarse porparte del transmisor
La unidad básicacontiene unaregulación de latensión dealimentación para eltransmisor. En caso deerror (sobretensión,sobrecorriente), laalimentación deltransmisor se puededesconectar de modofuncional
Cumplimiento de las condicionesambientales y defuncionamiento especificadaspara el transmisor
Ninguna No disponible.Debe garantizarse porparte del transmisor
La unidad básicadispone de unaentrada para el controlde la temperatura delmotor. En caso de errorel actuador se puededesconectar de modofuncional
1) Sensibilidad y cobertura de diagnosis (DC) dependientes de los límites de error parametrizados; la especificación es válida para elajuste de fábrica
2) La información de posición en caso de error es “estática” => posición de conmutación fija, motor parado / tensión de un canal estática => posición de conmutación cambia en máx. +/-90° de un periodo de señal del transmisor, el motor solo se mueve en este margen
Tab. A.20 Transmisor SEN/COS, transmisor Hiperface
Clasificación del módulo de seguridad en combinación con transmisores SEN/COS y
transmisores Hiperface
Encontrar error de transmisor: DC > 90 %
Clasificación según EN 61800-5-2 / EN 13849-1: SIL2 / cat. 3 / PL d (posicionamiento
seguro incl. parada)
y
SIL3 / cat. 3 / PL e (velocidad y
aceleración seguras)
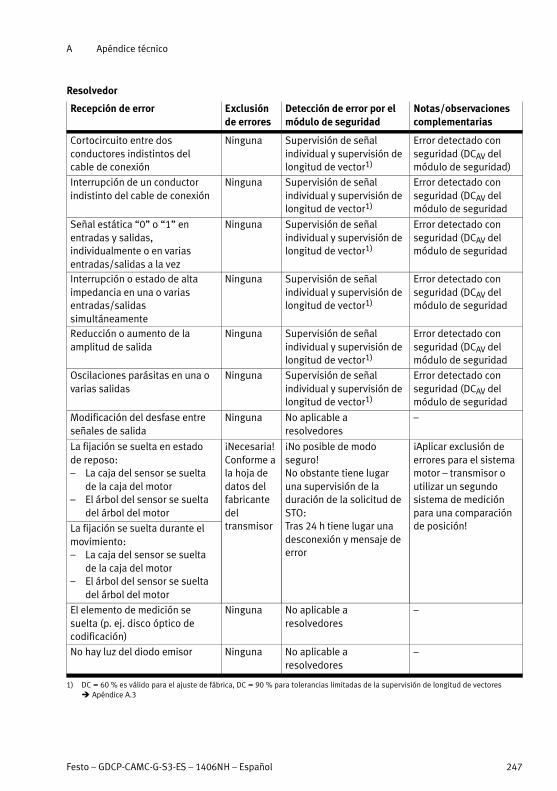
A Apéndice técnico
Festo – GDCP-CAMC-G-S3-ES – 1406NH – Español 247
Resolvedor
Recepción de error Exclusiónde errores
Detección de error por elmódulo de seguridad
Notas/observacionescomplementarias
Cortocircuito entre dosconductores indistintos delcable de conexión
Ninguna Supervisión de señalindividual y supervisión delongitud de vector1)
Error detectado conseguridad (DCAV delmódulo de seguridad)
Interrupción de un conductorindistinto del cable de conexión
Ninguna Supervisión de señalindividual y supervisión delongitud de vector1)
Error detectado conseguridad (DCAV delmódulo de seguridad
Señal estática “0” o “1” enentradas y salidas,individualmente o en variasentradas/salidas a la vez
Ninguna Supervisión de señalindividual y supervisión delongitud de vector1)
Error detectado conseguridad (DCAV delmódulo de seguridad
Interrupción o estado de altaimpedancia en una o variasentradas/salidassimultáneamente
Ninguna Supervisión de señalindividual y supervisión delongitud de vector1)
Error detectado conseguridad (DCAV delmódulo de seguridad
Reducción o aumento de laamplitud de salida
Ninguna Supervisión de señalindividual y supervisión delongitud de vector1)
Error detectado conseguridad (DCAV delmódulo de seguridad
Oscilaciones parásitas en una ovarias salidas
Ninguna Supervisión de señalindividual y supervisión delongitud de vector1)
Error detectado conseguridad (DCAV delmódulo de seguridad
Modificación del desfase entreseñales de salida
Ninguna No aplicable aresolvedores
–
La fijación se suelta en estadode reposo:– La caja del sensor se suelta
de la caja del motor– El árbol del sensor se suelta
del árbol del motor
¡Necesaria!Conforme ala hoja dedatos delfabricantedeltransmisor
¡No posible de modoseguro!No obstante tiene lugaruna supervisión de laduración de la solicitud deSTO:Tras 24 h tiene lugar unadesconexión y mensaje deerror
¡Aplicar exclusión deerrores para el sistemamotor – transmisor outilizar un segundosistema de mediciónpara una comparaciónde posición!La fijación se suelta durante el
movimiento:– La caja del sensor se suelta
de la caja del motor– El árbol del sensor se suelta
del árbol del motor
El elemento de medición sesuelta (p. ej. disco óptico decodificación)
Ninguna No aplicable aresolvedores
–
No hay luz del diodo emisor Ninguna No aplicable aresolvedores
–
1) DC = 60 % es válido para el ajuste de fábrica, DC = 90 % para tolerancias limitadas de la supervisión de longitud de vectores� Apéndice A.3
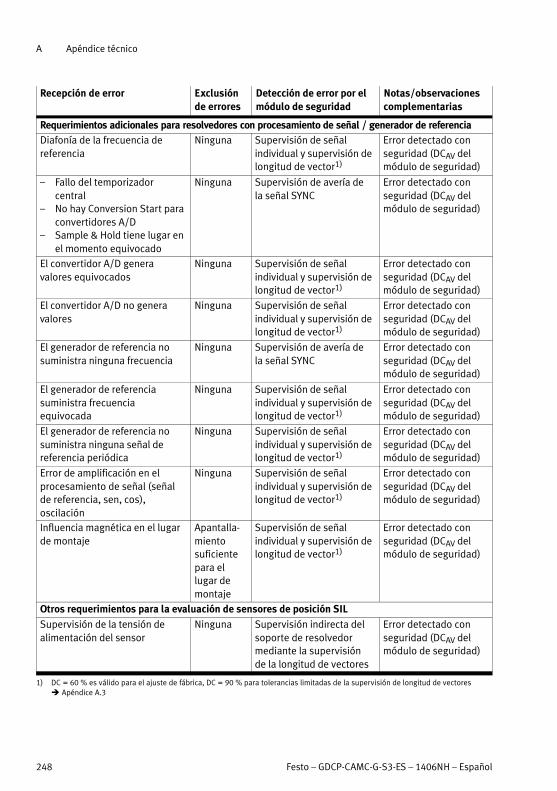
A Apéndice técnico
248 Festo – GDCP-CAMC-G-S3-ES – 1406NH – Español
Recepción de error Notas/observacionescomplementarias
Detección de error por elmódulo de seguridad
Exclusiónde errores
Requerimientos adicionales para resolvedores con procesamiento de señal / generador de referenciaDiafonía de la frecuencia dereferencia
Ninguna Supervisión de señalindividual y supervisión delongitud de vector1)
Error detectado conseguridad (DCAV delmódulo de seguridad)
– Fallo del temporizadorcentral
– No hay Conversion Start paraconvertidores A/D
– Sample & Hold tiene lugar enel momento equivocado
Ninguna Supervisión de avería dela señal SYNC
Error detectado conseguridad (DCAV delmódulo de seguridad)
El convertidor A/D generavalores equivocados
Ninguna Supervisión de señalindividual y supervisión delongitud de vector1)
Error detectado conseguridad (DCAV delmódulo de seguridad)
El convertidor A/D no generavalores
Ninguna Supervisión de señalindividual y supervisión delongitud de vector1)
Error detectado conseguridad (DCAV delmódulo de seguridad)
El generador de referencia nosuministra ninguna frecuencia
Ninguna Supervisión de avería dela señal SYNC
Error detectado conseguridad (DCAV delmódulo de seguridad)
El generador de referenciasuministra frecuenciaequivocada
Ninguna Supervisión de señalindividual y supervisión delongitud de vector1)
Error detectado conseguridad (DCAV delmódulo de seguridad)
El generador de referencia nosuministra ninguna señal dereferencia periódica
Ninguna Supervisión de señalindividual y supervisión delongitud de vector1)
Error detectado conseguridad (DCAV delmódulo de seguridad)
Error de amplificación en elprocesamiento de señal (señalde referencia, sen, cos),oscilación
Ninguna Supervisión de señalindividual y supervisión delongitud de vector1)
Error detectado conseguridad (DCAV delmódulo de seguridad)
Influencia magnética en el lugarde montaje
Apantallamientosuficientepara ellugar demontaje
Supervisión de señalindividual y supervisión delongitud de vector1)
Error detectado conseguridad (DCAV delmódulo de seguridad)
Otros requerimientos para la evaluación de sensores de posición SIL
Supervisión de la tensión dealimentación del sensor
Ninguna Supervisión indirecta delsoporte de resolvedormediante la supervisiónde la longitud de vectores
Error detectado conseguridad (DCAV delmódulo de seguridad)
1) DC = 60 % es válido para el ajuste de fábrica, DC = 90 % para tolerancias limitadas de la supervisión de longitud de vectores� Apéndice A.3
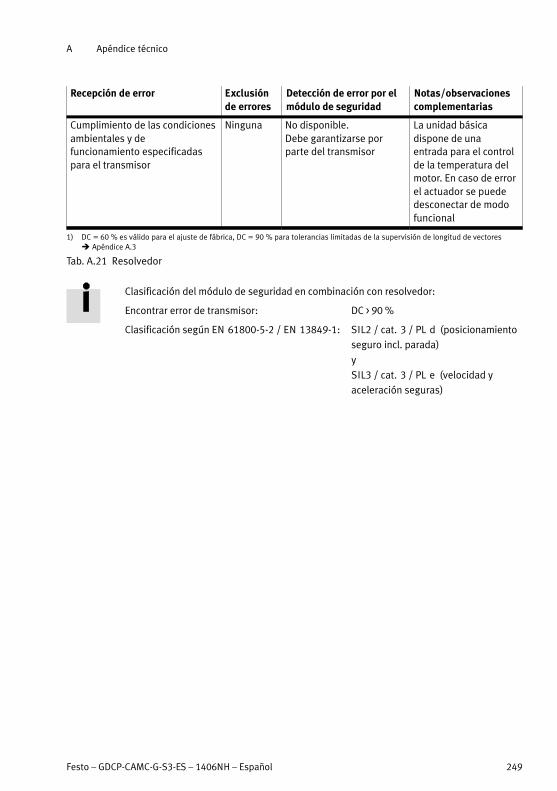
A Apéndice técnico
Festo – GDCP-CAMC-G-S3-ES – 1406NH – Español 249
Recepción de error Notas/observacionescomplementarias
Detección de error por elmódulo de seguridad
Exclusiónde errores
Cumplimiento de las condicionesambientales y defuncionamiento especificadaspara el transmisor
Ninguna No disponible. Debe garantizarse porparte del transmisor
La unidad básicadispone de unaentrada para el controlde la temperatura delmotor. En caso de errorel actuador se puededesconectar de modofuncional
1) DC = 60 % es válido para el ajuste de fábrica, DC = 90 % para tolerancias limitadas de la supervisión de longitud de vectores� Apéndice A.3
Tab. A.21 Resolvedor
Clasificación del módulo de seguridad en combinación con resolvedor:
Encontrar error de transmisor: DC > 90 %
Clasificación según EN 61800-5-2 / EN 13849-1: SIL2 / cat. 3 / PL d (posicionamiento
seguro incl. parada)
y
SIL3 / cat. 3 / PL e (velocidad y
aceleración seguras)
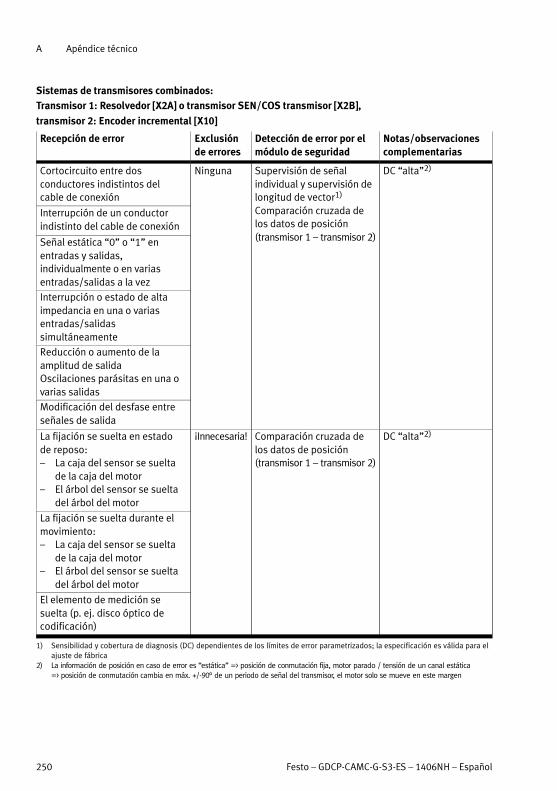
A Apéndice técnico
250 Festo – GDCP-CAMC-G-S3-ES – 1406NH – Español
Sistemas de transmisores combinados: Transmisor 1: Resolvedor [X2A] o transmisor SEN/COS transmisor [X2B],
transmisor 2: Encoder incremental [X10]
Recepción de error Exclusiónde errores
Detección de error por elmódulo de seguridad
Notas/observacionescomplementarias
Cortocircuito entre dosconductores indistintos delcable de conexión
Ninguna Supervisión de señalindividual y supervisión delongitud de vector1)
Comparación cruzada delos datos de posición (transmisor 1 – transmisor 2)
DC “alta”2)
Interrupción de un conductorindistinto del cable de conexión
Señal estática “0” o “1” enentradas y salidas,individualmente o en variasentradas/salidas a la vez
Interrupción o estado de altaimpedancia en una o variasentradas/salidassimultáneamente
Reducción o aumento de laamplitud de salidaOscilaciones parásitas en una ovarias salidas
Modificación del desfase entreseñales de salida
La fijación se suelta en estadode reposo:– La caja del sensor se suelta
de la caja del motor– El árbol del sensor se suelta
del árbol del motor
¡Innecesaria! Comparación cruzada delos datos de posición (transmisor 1 – transmisor 2)
DC “alta”2)
La fijación se suelta durante elmovimiento:– La caja del sensor se suelta
de la caja del motor– El árbol del sensor se suelta
del árbol del motor
El elemento de medición sesuelta (p. ej. disco óptico decodificación)
1) Sensibilidad y cobertura de diagnosis (DC) dependientes de los límites de error parametrizados; la especificación es válida para elajuste de fábrica
2) La información de posición en caso de error es “estática” => posición de conmutación fija, motor parado / tensión de un canal estática => posición de conmutación cambia en máx. +/-90° de un periodo de señal del transmisor, el motor solo se mueve en este margen
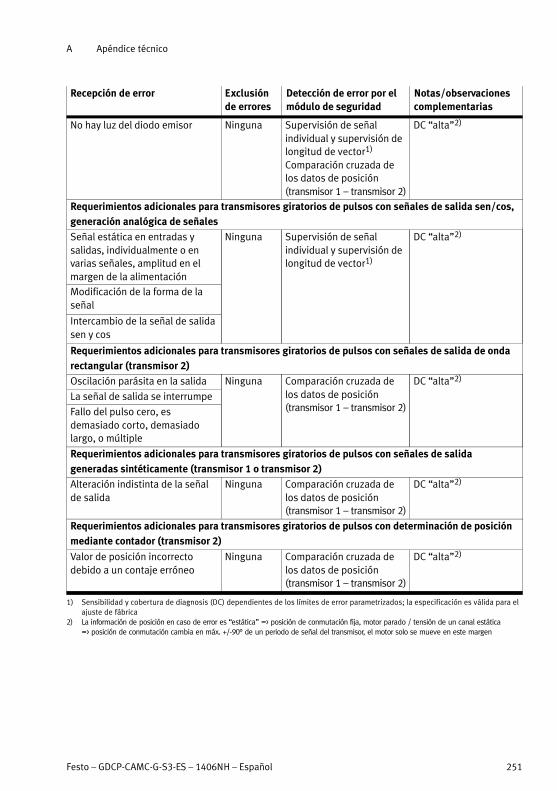
A Apéndice técnico
Festo – GDCP-CAMC-G-S3-ES – 1406NH – Español 251
Recepción de error Notas/observacionescomplementarias
Detección de error por elmódulo de seguridad
Exclusiónde errores
No hay luz del diodo emisor Ninguna Supervisión de señalindividual y supervisión delongitud de vector1)
Comparación cruzada delos datos de posición (transmisor 1 – transmisor 2)
DC “alta”2)
Requerimientos adicionales para transmisores giratorios de pulsos con señales de salida sen/cos,generación analógica de señales
Señal estática en entradas ysalidas, individualmente o envarias señales, amplitud en elmargen de la alimentación
Ninguna Supervisión de señalindividual y supervisión delongitud de vector1)
DC “alta”2)
Modificación de la forma de laseñal
Intercambio de la señal de salidasen y cos
Requerimientos adicionales para transmisores giratorios de pulsos con señales de salida de ondarectangular (transmisor 2)
Oscilación parásita en la salida Ninguna Comparación cruzada delos datos de posición (transmisor 1 – transmisor 2)
DC “alta”2)
La señal de salida se interrumpe
Fallo del pulso cero, esdemasiado corto, demasiadolargo, o múltiple
Requerimientos adicionales para transmisores giratorios de pulsos con señales de salidageneradas sintéticamente (transmisor 1 o transmisor 2)
Alteración indistinta de la señalde salida
Ninguna Comparación cruzada delos datos de posición (transmisor 1 – transmisor 2)
DC “alta”2)
Requerimientos adicionales para transmisores giratorios de pulsos con determinación de posiciónmediante contador (transmisor 2)
Valor de posición incorrectodebido a un contaje erróneo
Ninguna Comparación cruzada delos datos de posición (transmisor 1 – transmisor 2)
DC “alta”2)
1) Sensibilidad y cobertura de diagnosis (DC) dependientes de los límites de error parametrizados; la especificación es válida para elajuste de fábrica
2) La información de posición en caso de error es “estática” => posición de conmutación fija, motor parado / tensión de un canal estática => posición de conmutación cambia en máx. +/-90° de un periodo de señal del transmisor, el motor solo se mueve en este margen
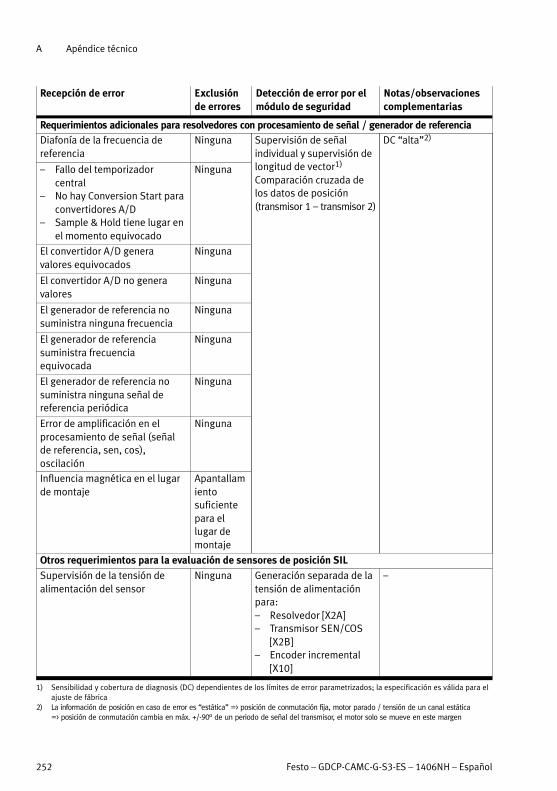
A Apéndice técnico
252 Festo – GDCP-CAMC-G-S3-ES – 1406NH – Español
Recepción de error Notas/observacionescomplementarias
Detección de error por elmódulo de seguridad
Exclusiónde errores
Requerimientos adicionales para resolvedores con procesamiento de señal / generador de referenciaDiafonía de la frecuencia dereferencia
Ninguna Supervisión de señalindividual y supervisión delongitud de vector1)
Comparación cruzada delos datos de posición (transmisor 1 – transmisor 2)
DC “alta”2)
– Fallo del temporizadorcentral
– No hay Conversion Start paraconvertidores A/D
– Sample & Hold tiene lugar enel momento equivocado
Ninguna
El convertidor A/D generavalores equivocados
Ninguna
El convertidor A/D no generavalores
Ninguna
El generador de referencia nosuministra ninguna frecuencia
Ninguna
El generador de referenciasuministra frecuenciaequivocada
Ninguna
El generador de referencia nosuministra ninguna señal dereferencia periódica
Ninguna
Error de amplificación en elprocesamiento de señal (señalde referencia, sen, cos),oscilación
Ninguna
Influencia magnética en el lugarde montaje
Apantallamientosuficientepara ellugar demontaje
Otros requerimientos para la evaluación de sensores de posición SIL
Supervisión de la tensión dealimentación del sensor
Ninguna Generación separada de latensión de alimentaciónpara:– Resolvedor [X2A]– Transmisor SEN/COS
[X2B]– Encoder incremental
[X10]
–
1) Sensibilidad y cobertura de diagnosis (DC) dependientes de los límites de error parametrizados; la especificación es válida para elajuste de fábrica
2) La información de posición en caso de error es “estática” => posición de conmutación fija, motor parado / tensión de un canal estática => posición de conmutación cambia en máx. +/-90° de un periodo de señal del transmisor, el motor solo se mueve en este margen
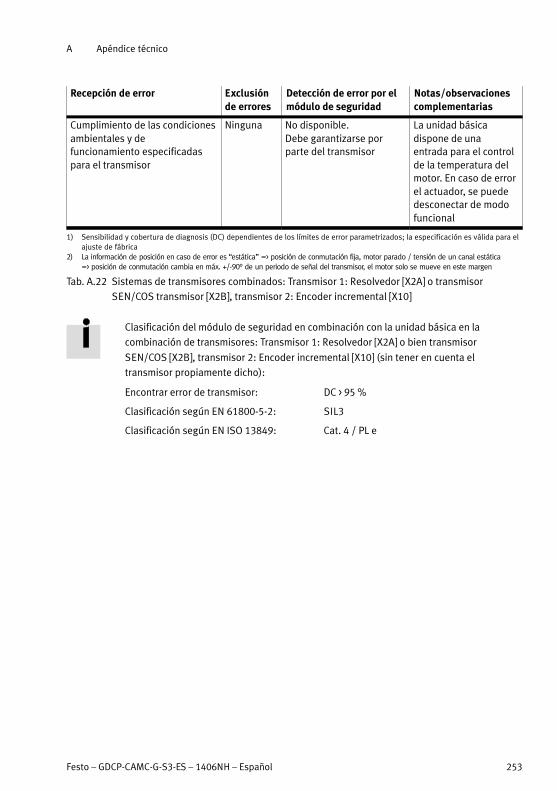
A Apéndice técnico
Festo – GDCP-CAMC-G-S3-ES – 1406NH – Español 253
Recepción de error Notas/observacionescomplementarias
Detección de error por elmódulo de seguridad
Exclusiónde errores
Cumplimiento de las condicionesambientales y defuncionamiento especificadaspara el transmisor
Ninguna No disponible.Debe garantizarse porparte del transmisor
La unidad básicadispone de unaentrada para el controlde la temperatura delmotor. En caso de errorel actuador, se puededesconectar de modofuncional
1) Sensibilidad y cobertura de diagnosis (DC) dependientes de los límites de error parametrizados; la especificación es válida para elajuste de fábrica
2) La información de posición en caso de error es “estática” => posición de conmutación fija, motor parado / tensión de un canal estática => posición de conmutación cambia en máx. +/-90° de un periodo de señal del transmisor, el motor solo se mueve en este margen
Tab. A.22 Sistemas de transmisores combinados: Transmisor 1: Resolvedor [X2A] o transmisor
SEN/COS transmisor [X2B], transmisor 2: Encoder incremental [X10]
Clasificación del módulo de seguridad en combinación con la unidad básica en la
combinación de transmisores: Transmisor 1: Resolvedor [X2A] o bien transmisor
SEN/COS [X2B], transmisor 2: Encoder incremental [X10] (sin tener en cuenta el
transmisor propiamente dicho):
Encontrar error de transmisor: DC > 95 %
Clasificación según EN 61800-5-2: SIL3
Clasificación según EN ISO 13849: Cat. 4 / PL e
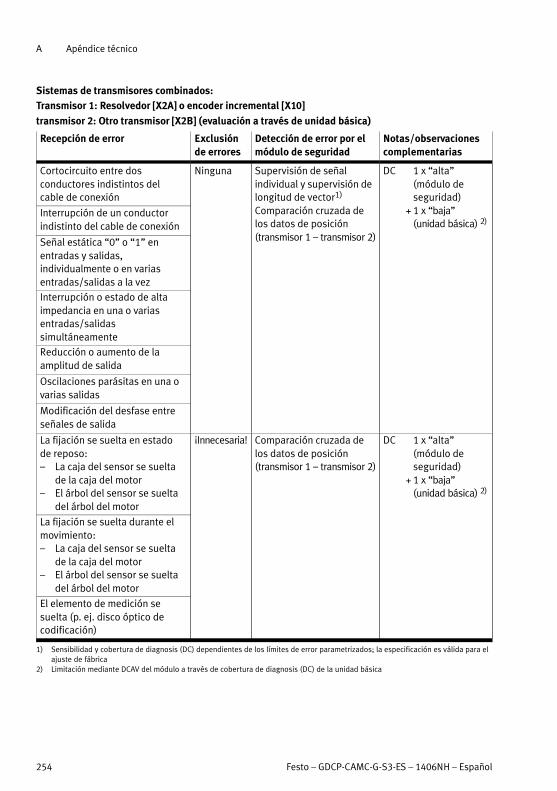
A Apéndice técnico
254 Festo – GDCP-CAMC-G-S3-ES – 1406NH – Español
Sistemas de transmisores combinados: Transmisor 1: Resolvedor [X2A] o encoder incremental [X10]
transmisor 2: Otro transmisor [X2B] (evaluación a través de unidad básica)
Recepción de error Exclusiónde errores
Detección de error por elmódulo de seguridad
Notas/observacionescomplementarias
Cortocircuito entre dosconductores indistintos delcable de conexión
Ninguna Supervisión de señalindividual y supervisión delongitud de vector1)
Comparación cruzada delos datos de posición (transmisor 1 – transmisor 2)
DC 1 x “alta”(módulo deseguridad)
+ 1 x “baja”(unidad básica) 2)
Interrupción de un conductorindistinto del cable de conexión
Señal estática “0” o “1” enentradas y salidas,individualmente o en variasentradas/salidas a la vez
Interrupción o estado de altaimpedancia en una o variasentradas/salidassimultáneamente
Reducción o aumento de laamplitud de salida
Oscilaciones parásitas en una ovarias salidas
Modificación del desfase entreseñales de salida
La fijación se suelta en estadode reposo:– La caja del sensor se suelta
de la caja del motor– El árbol del sensor se suelta
del árbol del motor
¡Innecesaria! Comparación cruzada delos datos de posición (transmisor 1 – transmisor 2)
DC 1 x “alta”(módulo deseguridad)
+ 1 x “baja”(unidad básica) 2)
La fijación se suelta durante elmovimiento:– La caja del sensor se suelta
de la caja del motor– El árbol del sensor se suelta
del árbol del motor
El elemento de medición sesuelta (p. ej. disco óptico decodificación)
1) Sensibilidad y cobertura de diagnosis (DC) dependientes de los límites de error parametrizados; la especificación es válida para elajuste de fábrica
2) Limitación mediante DCAV del módulo a través de cobertura de diagnosis (DC) de la unidad básica
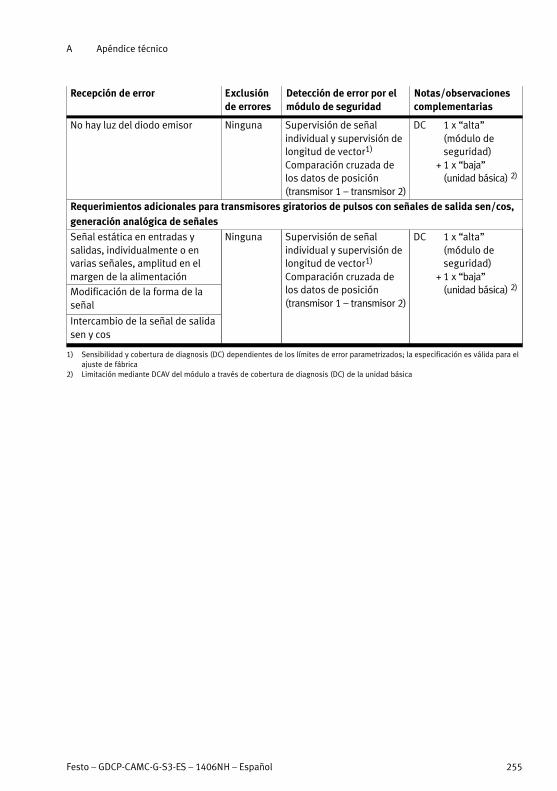
A Apéndice técnico
Festo – GDCP-CAMC-G-S3-ES – 1406NH – Español 255
Recepción de error Notas/observacionescomplementarias
Detección de error por elmódulo de seguridad
Exclusiónde errores
No hay luz del diodo emisor Ninguna Supervisión de señalindividual y supervisión delongitud de vector1)
Comparación cruzada delos datos de posición (transmisor 1 – transmisor 2)
DC 1 x “alta”(módulo deseguridad)
+ 1 x “baja”(unidad básica) 2)
Requerimientos adicionales para transmisores giratorios de pulsos con señales de salida sen/cos,generación analógica de señales
Señal estática en entradas ysalidas, individualmente o envarias señales, amplitud en elmargen de la alimentación
Ninguna Supervisión de señalindividual y supervisión delongitud de vector1)
Comparación cruzada delos datos de posición (transmisor 1 – transmisor 2)
DC 1 x “alta”(módulo deseguridad)
+ 1 x “baja”(unidad básica) 2)Modificación de la forma de la
señal
Intercambio de la señal de salidasen y cos
1) Sensibilidad y cobertura de diagnosis (DC) dependientes de los límites de error parametrizados; la especificación es válida para elajuste de fábrica
2) Limitación mediante DCAV del módulo a través de cobertura de diagnosis (DC) de la unidad básica
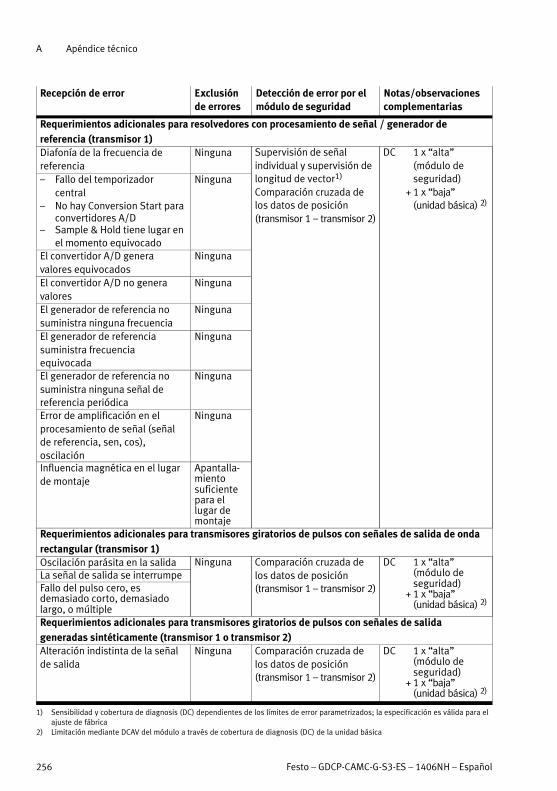
A Apéndice técnico
256 Festo – GDCP-CAMC-G-S3-ES – 1406NH – Español
Recepción de error Notas/observacionescomplementarias
Detección de error por elmódulo de seguridad
Exclusiónde errores
Requerimientos adicionales para resolvedores con procesamiento de señal / generador dereferencia (transmisor 1)Diafonía de la frecuencia dereferencia
Ninguna Supervisión de señalindividual y supervisión delongitud de vector1)
Comparación cruzada delos datos de posición (transmisor 1 – transmisor 2)
DC 1 x “alta”(módulo deseguridad)
+ 1 x “baja”(unidad básica) 2)
– Fallo del temporizadorcentral
– No hay Conversion Start paraconvertidores A/D
– Sample & Hold tiene lugar enel momento equivocado
Ninguna
El convertidor A/D generavalores equivocados
Ninguna
El convertidor A/D no generavalores
Ninguna
El generador de referencia nosuministra ninguna frecuencia
Ninguna
El generador de referenciasuministra frecuenciaequivocada
Ninguna
El generador de referencia nosuministra ninguna señal dereferencia periódica
Ninguna
Error de amplificación en elprocesamiento de señal (señalde referencia, sen, cos),oscilación
Ninguna
Influencia magnética en el lugarde montaje
Apantallamientosuficientepara ellugar demontaje
Requerimientos adicionales para transmisores giratorios de pulsos con señales de salida de ondarectangular (transmisor 1)Oscilación parásita en la salida Ninguna Comparación cruzada de
los datos de posición (transmisor 1 – transmisor 2)
DC 1 x “alta”(módulo deseguridad)
+ 1 x “baja”(unidad básica) 2)
La señal de salida se interrumpeFallo del pulso cero, esdemasiado corto, demasiadolargo, o múltipleRequerimientos adicionales para transmisores giratorios de pulsos con señales de salidageneradas sintéticamente (transmisor 1 o transmisor 2)Alteración indistinta de la señalde salida
Ninguna Comparación cruzada delos datos de posición (transmisor 1 – transmisor 2)
DC 1 x “alta”(módulo deseguridad)
+ 1 x “baja”(unidad básica) 2)
1) Sensibilidad y cobertura de diagnosis (DC) dependientes de los límites de error parametrizados; la especificación es válida para elajuste de fábrica
2) Limitación mediante DCAV del módulo a través de cobertura de diagnosis (DC) de la unidad básica
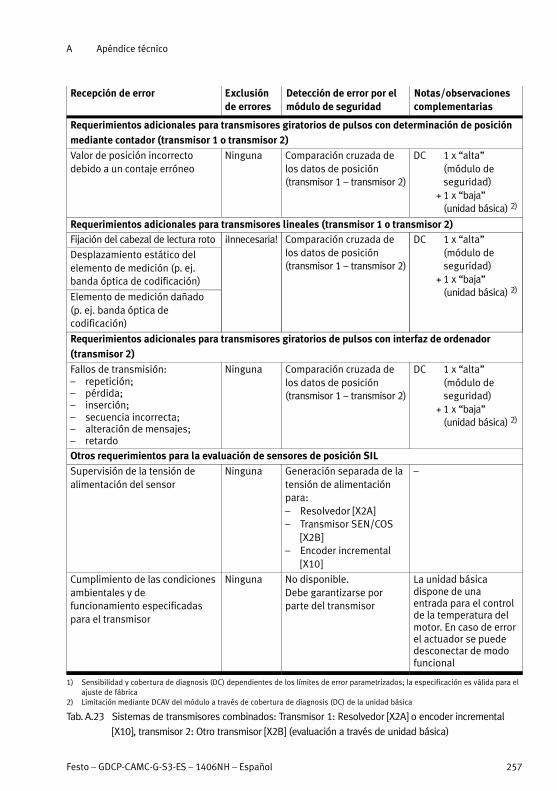
A Apéndice técnico
Festo – GDCP-CAMC-G-S3-ES – 1406NH – Español 257
Recepción de error Notas/observacionescomplementarias
Detección de error por elmódulo de seguridad
Exclusiónde errores
Requerimientos adicionales para transmisores giratorios de pulsos con determinación de posiciónmediante contador (transmisor 1 o transmisor 2)
Valor de posición incorrectodebido a un contaje erróneo
Ninguna Comparación cruzada delos datos de posición (transmisor 1 – transmisor 2)
DC 1 x “alta”(módulo deseguridad)
+ 1 x “baja”(unidad básica) 2)
Requerimientos adicionales para transmisores lineales (transmisor 1 o transmisor 2)Fijación del cabezal de lectura roto ¡Innecesaria! Comparación cruzada de
los datos de posición (transmisor 1 – transmisor 2)
DC 1 x “alta”(módulo deseguridad)
+ 1 x “baja”(unidad básica) 2)
Desplazamiento estático delelemento de medición (p. ej.banda óptica de codificación)
Elemento de medición dañado(p. ej. banda óptica decodificación)
Requerimientos adicionales para transmisores giratorios de pulsos con interfaz de ordenador(transmisor 2)
Fallos de transmisión:– repetición;– pérdida;– inserción;– secuencia incorrecta;– alteración de mensajes;– retardo
Ninguna Comparación cruzada delos datos de posición (transmisor 1 – transmisor 2)
DC 1 x “alta”(módulo deseguridad)
+ 1 x “baja”(unidad básica) 2)
Otros requerimientos para la evaluación de sensores de posición SIL
Supervisión de la tensión dealimentación del sensor
Ninguna Generación separada de latensión de alimentaciónpara:– Resolvedor [X2A]– Transmisor SEN/COS
[X2B]– Encoder incremental
[X10]
–
Cumplimiento de las condicionesambientales y defuncionamiento especificadaspara el transmisor
Ninguna No disponible.Debe garantizarse porparte del transmisor
La unidad básicadispone de unaentrada para el controlde la temperatura delmotor. En caso de errorel actuador se puededesconectar de modofuncional
1) Sensibilidad y cobertura de diagnosis (DC) dependientes de los límites de error parametrizados; la especificación es válida para elajuste de fábrica
2) Limitación mediante DCAV del módulo a través de cobertura de diagnosis (DC) de la unidad básica
Tab. A.23 Sistemas de transmisores combinados: Transmisor 1: Resolvedor [X2A] o encoder incremental
[X10], transmisor 2: Otro transmisor [X2B] (evaluación a través de unidad básica)
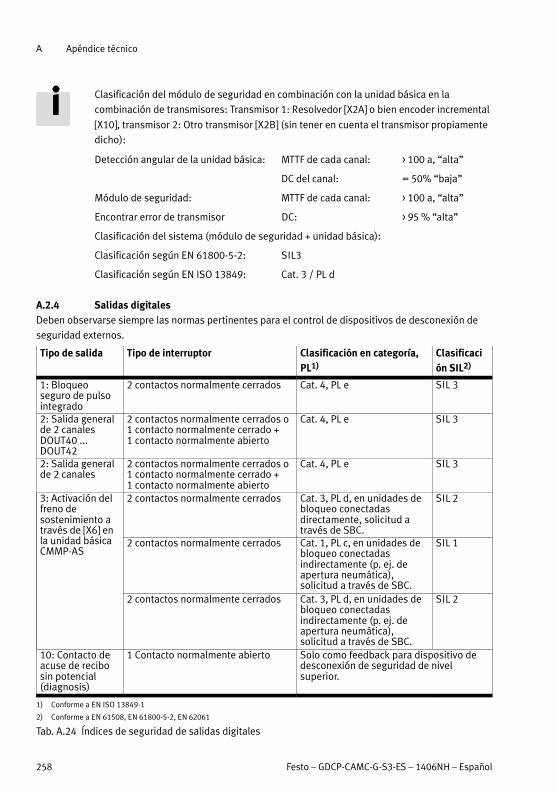
A Apéndice técnico
258 Festo – GDCP-CAMC-G-S3-ES – 1406NH – Español
Clasificación del módulo de seguridad en combinación con la unidad básica en la
combinación de transmisores: Transmisor 1: Resolvedor [X2A] o bien encoder incremental
[X10], transmisor 2: Otro transmisor [X2B] (sin tener en cuenta el transmisor propiamente
dicho):
Detección angular de la unidad básica: MTTF de cada canal: > 100 a, “alta”
DC del canal: = 50% “baja”
Módulo de seguridad: MTTF de cada canal: > 100 a, “alta”
Encontrar error de transmisor DC: > 95 % “alta”
Clasificación del sistema (módulo de seguridad + unidad básica):
Clasificación según EN 61800-5-2: SIL3
Clasificación según EN ISO 13849: Cat. 3 / PL d
A.2.4 Salidas digitalesDeben observarse siempre las normas pertinentes para el control de dispositivos de desconexión de
seguridad externos.
Tipo de salida Tipo de interruptor Clasificación en categoría,PL1)
Clasificación SIL2)
1: Bloqueoseguro de pulsointegrado
2 contactos normalmente cerrados Cat. 4, PL e SIL 3
2: Salida generalde 2 canalesDOUT40 ...DOUT42
2 contactos normalmente cerrados o1 contacto normalmente cerrado +1 contacto normalmente abierto
Cat. 4, PL e SIL 3
2: Salida generalde 2 canales
2 contactos normalmente cerrados o1 contacto normalmente cerrado +1 contacto normalmente abierto
Cat. 4, PL e SIL 3
3: Activación delfreno desostenimiento através de [X6] enla unidad básicaCMMP-AS
2 contactos normalmente cerrados Cat. 3, PL d, en unidades debloqueo conectadasdirectamente, solicitud através de SBC.
SIL 2
2 contactos normalmente cerrados Cat. 1, PL c, en unidades debloqueo conectadasindirectamente (p. ej. deapertura neumática),solicitud a través de SBC.
SIL 1
2 contactos normalmente cerrados Cat. 3, PL d, en unidades debloqueo conectadasindirectamente (p. ej. deapertura neumática),solicitud a través de SBC.
SIL 2
10: Contacto deacuse de recibosin potencial(diagnosis)
1 Contacto normalmente abierto Solo como feedback para dispositivo dedesconexión de seguridad de nivelsuperior.
1) Conforme a EN ISO 13849-1
2) Conforme a EN 61508, EN 61800-5-2, EN 62061
Tab. A.24 Índices de seguridad de salidas digitales
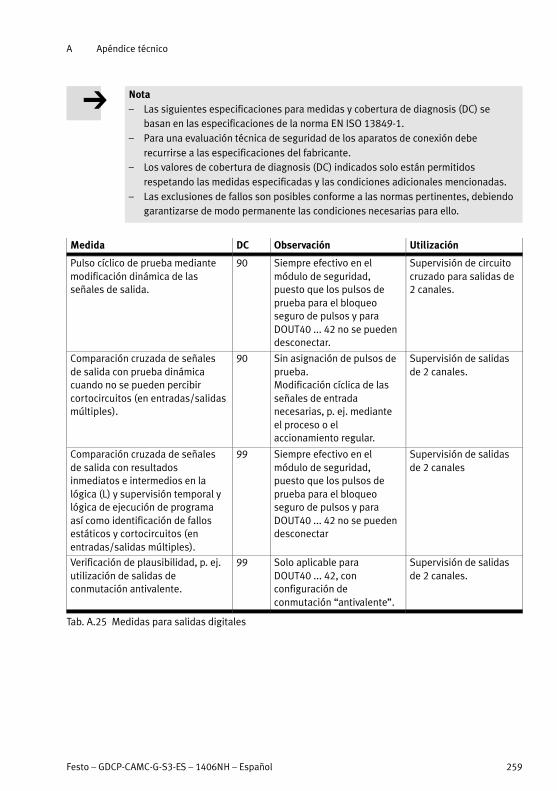
A Apéndice técnico
Festo – GDCP-CAMC-G-S3-ES – 1406NH – Español 259
Nota– Las siguientes especificaciones para medidas y cobertura de diagnosis (DC) se
basan en las especificaciones de la norma EN ISO 13849-1.– Para una evaluación técnica de seguridad de los aparatos de conexión debe
recurrirse a las especificaciones del fabricante.– Los valores de cobertura de diagnosis (DC) indicados solo están permitidos
respetando las medidas especificadas y las condiciones adicionales mencionadas.– Las exclusiones de fallos son posibles conforme a las normas pertinentes, debiendo
garantizarse de modo permanente las condiciones necesarias para ello.
Medida DC Observación Utilización
Pulso cíclico de prueba mediantemodificación dinámica de lasseñales de salida.
90 Siempre efectivo en elmódulo de seguridad,puesto que los pulsos deprueba para el bloqueoseguro de pulsos y paraDOUT40 ... 42 no se puedendesconectar.
Supervisión de circuitocruzado para salidas de2 canales.
Comparación cruzada de señalesde salida con prueba dinámicacuando no se pueden percibircortocircuitos (en entradas/salidasmúltiples).
90 Sin asignación de pulsos deprueba.Modificación cíclica de lasseñales de entradanecesarias, p. ej. medianteel proceso o elaccionamiento regular.
Supervisión de salidasde 2 canales.
Comparación cruzada de señalesde salida con resultadosinmediatos e intermedios en lalógica (L) y supervisión temporal ylógica de ejecución de programaasí como identificación de fallosestáticos y cortocircuitos (enentradas/salidas múltiples).
99 Siempre efectivo en elmódulo de seguridad,puesto que los pulsos deprueba para el bloqueoseguro de pulsos y paraDOUT40 ... 42 no se puedendesconectar
Supervisión de salidasde 2 canales
Verificación de plausibilidad, p. ej.utilización de salidas deconmutación antivalente.
99 Solo aplicable paraDOUT40 ... 42, conconfiguración deconmutación “antivalente”.
Supervisión de salidasde 2 canales.
Tab. A.25 Medidas para salidas digitales
A Apéndice técnico
260 Festo – GDCP-CAMC-G-S3-ES – 1406NH – Español
A.3 Precisión del sistema y tiempo de respuesta
Las secciones siguientes contemplan los requerimientos de precisión del sistema de la ingeniería de
seguridad funcional respecto a las funciones de movimiento controladas de modo seguro para la
posición y la velocidad.
La precisión del sistema que se puede lograr depende en primer lugar de la estructura
del sistema, compuesta de: Motor – Reductor – Eje
Puede aumentar especialmente mediante el uso de un reductor o la elección de un eje
con avance mínimo (� Sección A.3.7, Tab. A.35).
Las precisiones y tiempos de respuesta especificados para el módulo de seguridad representan
siempre un compromiso entre:
– la resolución y la precisión de los sensores de posición conectados y de la electrónica de
evaluación asignada en el módulo de seguridad,
– la elevada precisión deseada para el control de los valores límite para posición y velocidad,
– el tiempo de respuesta hasta que se detecta una vulneración de una condición,
– la disponibilidad del equipo durante el funcionamiento en el entorno industrial (perturbaciones,
compatibilidad electromagnética, etc.).
Por ello las precisiones y tiempos de respuesta deberían seleccionarse con valores tan altos como
sean necesarios para la seguridad, pero no mayores.
NotaLos ajustes de fábrica del módulo de seguridad para la evaluación de transmisores, la
detección de la velocidad y para la supervisión de posición son adecuados para la
mayoría de las aplicaciones. Están adaptados a la resolución de los sensores de
posición y a la electrónica de evaluación del módulo de seguridad.
Solo deberían modificarse en casos problemáticos fundados, porque influyen en el
tiempo de respuesta del módulo de seguridad durante la detección de movimientos
peligrosos o en la detección de errores. Son los denominados “parámetros
avanzados”.
Compruebe si, como alternativa, se puede modificar la mecánica (p. ej., eje con avance
reducido).
Antes de parametrizar las funciones de seguridad asegúrese, a través de la adquisición
de datos (� Sección 2.3), de que el módulo de seguridad dispone de los parámetros
correctos para la constante de avance y de las relaciones de reducción correctas.
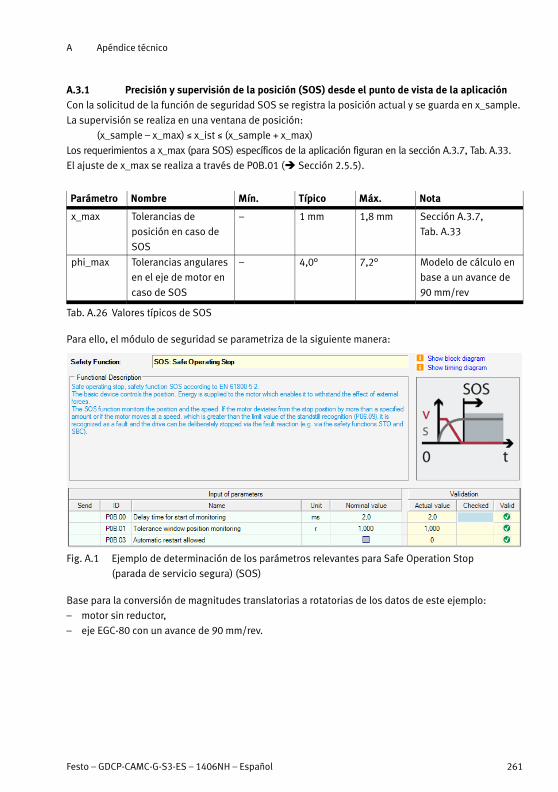
A Apéndice técnico
Festo – GDCP-CAMC-G-S3-ES – 1406NH – Español 261
A.3.1 Precisión y supervisión de la posición (SOS) desde el punto de vista de la aplicaciónCon la solicitud de la función de seguridad SOS se registra la posición actual y se guarda en x_sample.
La supervisión se realiza en una ventana de posición:
(x_sample – x_max) ≤ x_ist ≤ (x_sample + x_max)
Los requerimientos a x_max (para SOS) específicos de la aplicación figuran en la sección A.3.7, Tab. A.33.
El ajuste de x_max se realiza a través de P0B.01 (� Sección 2.5.5).
Parámetro Nombre Mín. Típico Máx. Nota
x_max Tolerancias de
posición en caso de
SOS
– 1 mm 1,8 mm Sección A.3.7,
Tab. A.33
phi_max Tolerancias angulares
en el eje de motor en
caso de SOS
– 4,0° 7,2° Modelo de cálculo en
base a un avance de
90 mm/rev
Tab. A.26 Valores típicos de SOS
Para ello, el módulo de seguridad se parametriza de la siguiente manera:
Fig. A.1 Ejemplo de determinación de los parámetros relevantes para Safe Operation Stop
(parada de servicio segura) (SOS)
Base para la conversión de magnitudes translatorias a rotatorias de los datos de este ejemplo:
– motor sin reductor,
– eje EGC-80 con un avance de 90 mm/rev.
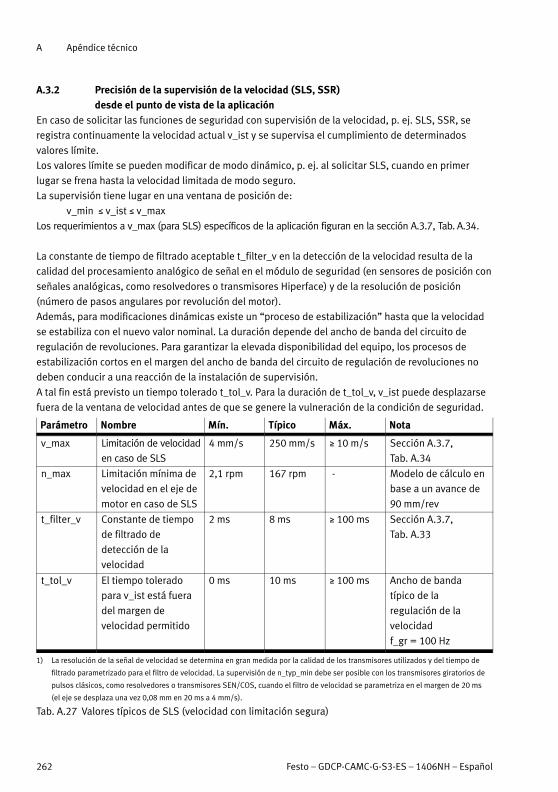
A Apéndice técnico
262 Festo – GDCP-CAMC-G-S3-ES – 1406NH – Español
A.3.2 Precisión de la supervisión de la velocidad (SLS, SSR) desde el punto de vista de la aplicación
En caso de solicitar las funciones de seguridad con supervisión de la velocidad, p. ej. SLS, SSR, se
registra continuamente la velocidad actual v_ist y se supervisa el cumplimiento de determinados
valores límite.
Los valores límite se pueden modificar de modo dinámico, p. ej. al solicitar SLS, cuando en primer
lugar se frena hasta la velocidad limitada de modo seguro.
La supervisión tiene lugar en una ventana de posición de:
v_min ≤ v_ist ≤ v_max
Los requerimientos a v_max (para SLS) específicos de la aplicación figuran en la sección A.3.7, Tab. A.34.
La constante de tiempo de filtrado aceptable t_filter_v en la detección de la velocidad resulta de la
calidad del procesamiento analógico de señal en el módulo de seguridad (en sensores de posición con
señales analógicas, como resolvedores o transmisores Hiperface) y de la resolución de posición
(número de pasos angulares por revolución del motor).
Además, para modificaciones dinámicas existe un “proceso de estabilización” hasta que la velocidad
se estabiliza con el nuevo valor nominal. La duración depende del ancho de banda del circuito de
regulación de revoluciones. Para garantizar la elevada disponibilidad del equipo, los procesos de
estabilización cortos en el margen del ancho de banda del circuito de regulación de revoluciones no
deben conducir a una reacción de la instalación de supervisión.
A tal fin está previsto un tiempo tolerado t_tol_v. Para la duración de t_tol_v, v_ist puede desplazarse
fuera de la ventana de velocidad antes de que se genere la vulneración de la condición de seguridad.
Parámetro Nombre Mín. Típico Máx. Nota
v_max Limitación de velocidad
en caso de SLS
4 mm/s 250 mm/s ≥ 10 m/s Sección A.3.7,
Tab. A.34
n_max Limitación mínima de
velocidad en el eje de
motor en caso de SLS
2,1 rpm 167 rpm Modelo de cálculo en
base a un avance de
90 mm/rev
t_filter_v Constante de tiempo
de filtrado de
detección de la
velocidad
2 ms 8 ms ≥ 100 ms Sección A.3.7,
Tab. A.33
t_tol_v El tiempo tolerado
para v_ist está fuera
del margen de
velocidad permitido
0 ms 10 ms ≥ 100 ms Ancho de banda
típico de la
regulación de la
velocidad
f_gr = 100 Hz
1) La resolución de la señal de velocidad se determina en gran medida por la calidad de los transmisores utilizados y del tiempo de
filtrado parametrizado para el filtro de velocidad. La supervisión de n_typ_min debe ser posible con los transmisores giratorios de
pulsos clásicos, como resolvedores o transmisores SEN/COS, cuando el filtro de velocidad se parametriza en el margen de 20 ms
(el eje se desplaza una vez 0,08 mm en 20 ms a 4 mm/s).
Tab. A.27 Valores típicos de SLS (velocidad con limitación segura)
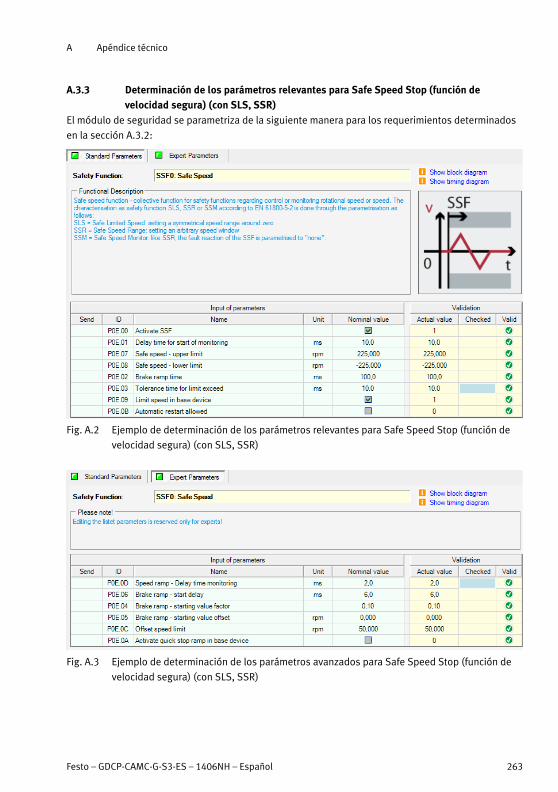
A Apéndice técnico
Festo – GDCP-CAMC-G-S3-ES – 1406NH – Español 263
A.3.3 Determinación de los parámetros relevantes para Safe Speed Stop (función develocidad segura) (con SLS, SSR)
El módulo de seguridad se parametriza de la siguiente manera para los requerimientos determinados
en la sección A.3.2:
Fig. A.2 Ejemplo de determinación de los parámetros relevantes para Safe Speed Stop (función de
velocidad segura) (con SLS, SSR)
Fig. A.3 Ejemplo de determinación de los parámetros avanzados para Safe Speed Stop (función de
velocidad segura) (con SLS, SSR)
A Apéndice técnico
264 Festo – GDCP-CAMC-G-S3-ES – 1406NH – Español
A.3.4 Requerimientos para errores de transmisores desde el punto de vista de la aplicaciónLa evaluación de los sensores de posición en el módulo de seguridad se basa en uno de los dos
principios básicos siguientes:
a) Están disponibles dos informaciones de posición redundantes, que también son evaluadas por dos
microcontroladores de modo redundante y por separado, es decir, también dos señales de
velocidad independientes.
Ejemplo: Motor con transmisor ENDAT + segundo sensor incremental de posición en el eje.
b) Solo está disponible una información de posición “segura”; la información se transmite a través de
los mismos cables y, en parte, a través de componentes de circuito idénticos (p. ej. amplificador
diferencial para las señales de entrada) y es evaluada de forma redundante por dos
microcontroladores.
Ejemplo: Resolvedor (SIL2) o transmisor SEN/COS con SIL 2/SIL 3.
Caso a) La detección de errores de transmisión y desviaciones de posición entre los sensores de
posición 1 y 2 no es de “tiempo crícito”, puesto que la supervisión a través del otro transmisor
respectivo siempre está garantizada, incluso cuando falla uno de los transmisores.
Caso b) La detección de desviaciones de posición entre el microcontrolador1 y el microcontrolador2
no es de “tiempo crítico”, puesto que la supervisión siempre está garantizada por el otro
microcontrolador.
La detección de errores en el canal de transmisión (p. ej. cable) y en los componentes de
circuitos utilizados en común para la evaluación de transmisores debe realizarse lo más
rápidamente posible dentro de un tiempo de respuesta ante errores a especificar.
La detección de errores de transmisores se basa principalmente en una supervisión de señales
analógicas. Los límites de la supervisión de señales influyen en la precisión resultante de la
supervisión y en el grado de cobertura de diagnosis � véase la sección A.2.3.
La supervisión de la diferencia de posición no debe ser más precisa que en otros casos de error.
El “Worst Case” para un movimiento incontrolado del eje es una fusión parcial de dos
semiconductores de potencia en el paso de salida del CMMPASM3. Este fallo origina en el peor de
los casos una sacudida del eje de hasta 180° eléctricos (== 45° en el eje con un motor de 8 polos).
Observación: Obviamente, el sistema debe diseñarse de manera que este error no provoque una
diferencia de posición inadmisile, p. ej. mediante la elección de un avance o reductor reducido
adecuado.
NotaExiste peligro de sacudidas del accionamiento si ocurren fallos múltiples en el
CMMP-AS-...-M3.
Si durante el estado STO falla el paso de salida del controlador de motor (cortocircuito
simultáneo de 2 semiconductores de potencia en diferentes pasos), puede generarse
un movimiento de retención limitado del rotor. El ángulo de giro / paso equivale a un
paso polar. Ejemplos:
– Eje rotativo, máquina sincrónica, de 8 contactos � Movimiento 45° en el árbol de
motor.
– Motor lineal, paso polar 20 mm � Movimiento 20 mm en la pieza móvil.
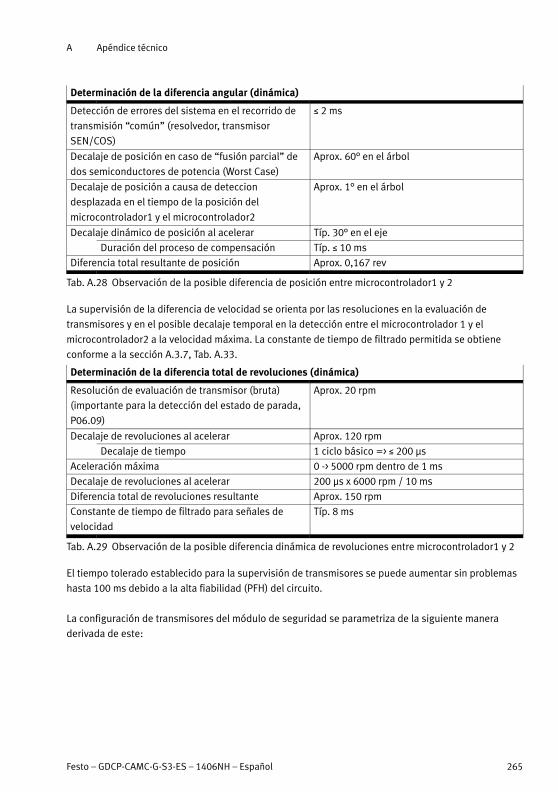
A Apéndice técnico
Festo – GDCP-CAMC-G-S3-ES – 1406NH – Español 265
Determinación de la diferencia angular (dinámica)
Detección de errores del sistema en el recorrido de
transmisión “común” (resolvedor, transmisor
SEN/COS)
≤ 2 ms
Decalaje de posición en caso de “fusión parcial” de
dos semiconductores de potencia (Worst Case)
Aprox. 60° en el árbol
Decalaje de posición a causa de deteccion
desplazada en el tiempo de la posición del
microcontrolador1 y el microcontrolador2
Aprox. 1° en el árbol
Decalaje dinámico de posición al acelerar Típ. 30° en el eje
Duración del proceso de compensación Típ. ≤ 10 ms
Diferencia total resultante de posición Aprox. 0,167 rev
Tab. A.28 Observación de la posible diferencia de posición entre microcontrolador1 y 2
La supervisión de la diferencia de velocidad se orienta por las resoluciones en la evaluación de
transmisores y en el posible decalaje temporal en la detección entre el microcontrolador 1 y el
microcontrolador2 a la velocidad máxima. La constante de tiempo de filtrado permitida se obtiene
conforme a la sección A.3.7, Tab. A.33.
Determinación de la diferencia total de revoluciones (dinámica)
Resolución de evaluación de transmisor (bruta)
(importante para la detección del estado de parada,
P06.09)
Aprox. 20 rpm
Decalaje de revoluciones al acelerar Aprox. 120 rpm
Decalaje de tiempo 1 ciclo básico => ≤ 200 μs
Aceleración máxima 0 > 5000 rpm dentro de 1 ms
Decalaje de revoluciones al acelerar 200 μs x 6000 rpm / 10 ms
Diferencia total de revoluciones resultante Aprox. 150 rpm
Constante de tiempo de filtrado para señales de
velocidad
Típ. 8 ms
Tab. A.29 Observación de la posible diferencia dinámica de revoluciones entre microcontrolador1 y 2
El tiempo tolerado establecido para la supervisión de transmisores se puede aumentar sin problemas
hasta 100 ms debido a la alta fiabilidad (PFH) del circuito.
La configuración de transmisores del módulo de seguridad se parametriza de la siguiente manera
derivada de este:
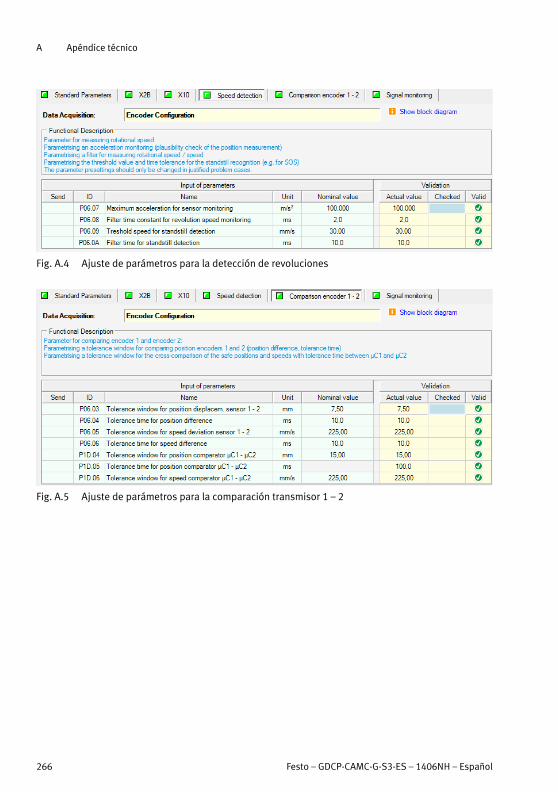
A Apéndice técnico
266 Festo – GDCP-CAMC-G-S3-ES – 1406NH – Español
Fig. A.4 Ajuste de parámetros para la detección de revoluciones
Fig. A.5 Ajuste de parámetros para la comparación transmisor 1 – 2
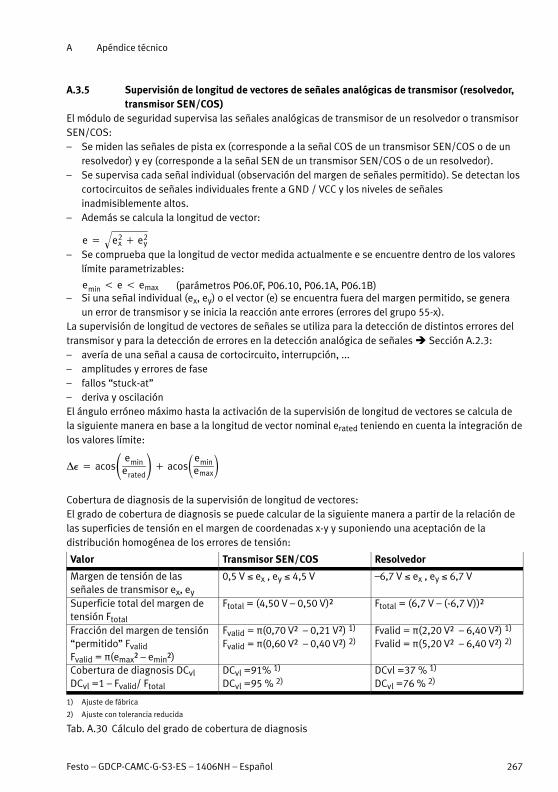
A Apéndice técnico
Festo – GDCP-CAMC-G-S3-ES – 1406NH – Español 267
A.3.5 Supervisión de longitud de vectores de señales analógicas de transmisor (resolvedor,transmisor SEN/COS)
El módulo de seguridad supervisa las señales analógicas de transmisor de un resolvedor o transmisorSEN/COS:– Se miden las señales de pista ex (corresponde a la señal COS de un transmisor SEN/COS o de un
resolvedor) y ey (corresponde a la señal SEN de un transmisor SEN/COS o de un resolvedor).– Se supervisa cada señal individual (observación del margen de señales permitido). Se detectan los
cortocircuitos de señales individuales frente a GND / VCC y los niveles de señalesinadmisiblemente altos.
– Además se calcula la longitud de vector:
e � e2x � e2
y�
– Se comprueba que la longitud de vector medida actualmente e se encuentre dentro de los valoreslímite parametrizables:
emin � e � emax (parámetros P06.0F, P06.10, P06.1A, P06.1B)– Si una señal individual (ex, ey) o el vector (e) se encuentra fuera del margen permitido, se genera
un error de transmisor y se inicia la reacción ante errores (errores del grupo 55-x).La supervisión de longitud de vectores de señales se utiliza para la detección de distintos errores deltransmisor y para la detección de errores en la detección analógica de señales � Sección A.2.3:– avería de una señal a causa de cortocircuito, interrupción, ...– amplitudes y errores de fase– fallos “stuck-at”– deriva y oscilaciónEl ángulo erróneo máximo hasta la activación de la supervisión de longitud de vectores se calcula dela siguiente manera en base a la longitud de vector nominal erated teniendo en cuenta la integración delos valores límite:
�� � acos� eminerated�� acos�emin
emax�
Cobertura de diagnosis de la supervisión de longitud de vectores:El grado de cobertura de diagnosis se puede calcular de la siguiente manera a partir de la relación delas superficies de tensión en el margen de coordenadas x-y y suponiendo una aceptación de ladistribución homogénea de los errores de tensión:
Valor Transmisor SEN/COS Resolvedor
Margen de tensión de lasseñales de transmisor ex, ey
0,5 V ex , ey 4,5 V –6,7 V ex , ey 6,7 V
Superficie total del margen detensión Ftotal
Ftotal = (4,50 V – 0,50 V)² Ftotal = (6,7 V – (-6,7 V))²
Fracción del margen de tensión“permitido” FvalidFvalid = ð(emax² – emin²)
Fvalid = ð(0,70 V² – 0,21 V²) 1)
Fvalid = ð(0,60 V² – 0,40 V²) 2)Fvalid = ð(2,20 V² – 6,40 V²) 1)
Fvalid = ð(5,20 V² – 6,40 V²) 2)
Cobertura de diagnosis DCvlDCvl =1 – Fvalid/ Ftotal
DCvl =91% 1)
DCvl =95 % 2)DCvl =37 % 1)
DCvl =76 % 2)
1) Ajuste de fábrica
2) Ajuste con tolerancia reducida
Tab. A.30 Cálculo del grado de cobertura de diagnosis
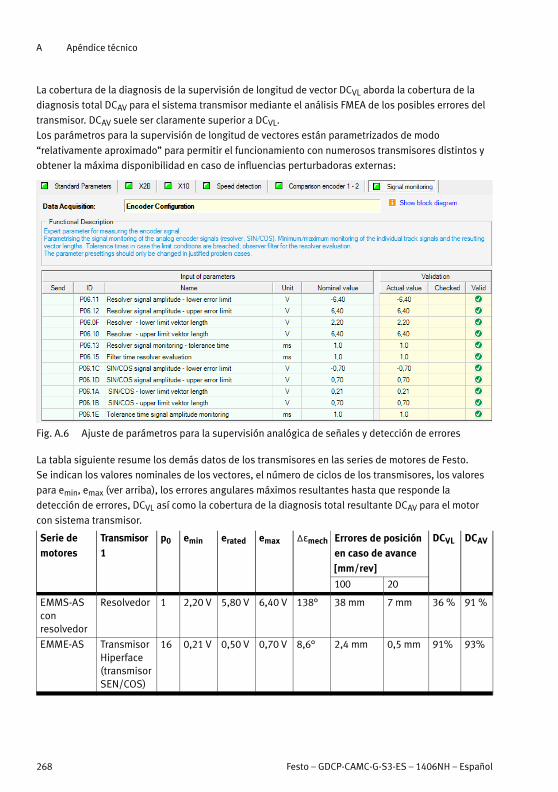
A Apéndice técnico
268 Festo – GDCP-CAMC-G-S3-ES – 1406NH – Español
La cobertura de la diagnosis de la supervisión de longitud de vector DCVL aborda la cobertura de la
diagnosis total DCAV para el sistema transmisor mediante el análisis FMEA de los posibles errores del
transmisor. DCAV suele ser claramente superior a DCVL.
Los parámetros para la supervisión de longitud de vectores están parametrizados de modo
“relativamente aproximado” para permitir el funcionamiento con numerosos transmisores distintos y
obtener la máxima disponibilidad en caso de influencias perturbadoras externas:
Fig. A.6 Ajuste de parámetros para la supervisión analógica de señales y detección de errores
La tabla siguiente resume los demás datos de los transmisores en las series de motores de Festo.
Se indican los valores nominales de los vectores, el número de ciclos de los transmisores, los valores
para emin, emax (ver arriba), los errores angulares máximos resultantes hasta que responde la
detección de errores, DCVL así como la cobertura de la diagnosis total resultante DCAV para el motor
con sistema transmisor.
Serie demotores
Transmisor1
p0 emin erated emax Δåmech Errores de posiciónen caso de avance[mm/rev]
DCVL DCAV
100 20
EMMS-AS conresolvedor
Resolvedor 1 2,20 V 5,80 V 6,40 V 138° 38 mm 7 mm 36 % 91 %
EMME-AS TransmisorHiperface(transmisorSEN/COS)
16 0,21 V 0,50 V 0,70 V 8,6° 2,4 mm 0,5 mm 91% 93%
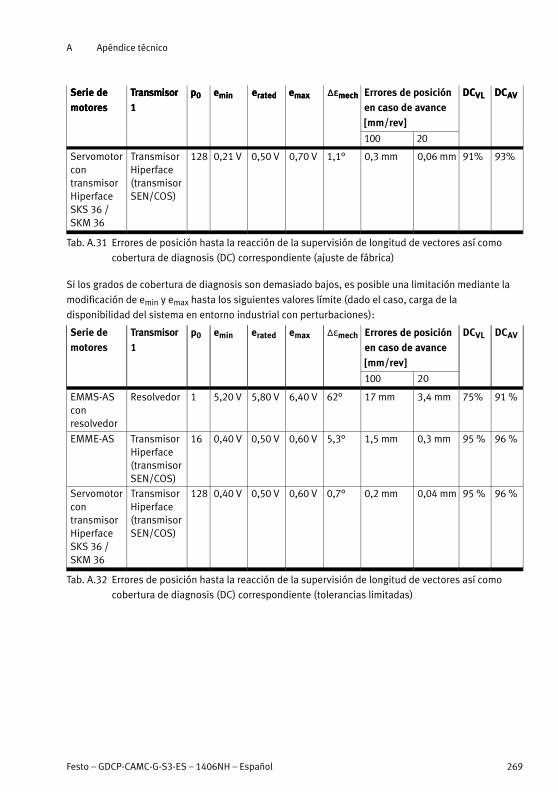
A Apéndice técnico
Festo – GDCP-CAMC-G-S3-ES – 1406NH – Español 269
Serie demotores
DCAVDCVLErrores de posiciónen caso de avance[mm/rev]
Δåmechemaxeratedeminp0Transmisor1
Serie demotores
DCAVDCVL
20 100
Δåmechemaxeratedeminp0Transmisor1
ServomotorcontransmisorHiperfaceSKS 36 /SKM 36
TransmisorHiperface(transmisorSEN/COS)
128 0,21 V 0,50 V 0,70 V 1,1° 0,3 mm 0,06 mm 91% 93%
Tab. A.31 Errores de posición hasta la reacción de la supervisión de longitud de vectores así como
cobertura de diagnosis (DC) correspondiente (ajuste de fábrica)
Si los grados de cobertura de diagnosis son demasiado bajos, es posible una limitación mediante la
modificación de emin y emax hasta los siguientes valores límite (dado el caso, carga de la
disponibilidad del sistema en entorno industrial con perturbaciones):
Serie demotores
Transmisor1
p0 emin erated emax Δåmech Errores de posiciónen caso de avance[mm/rev]
DCVL DCAV
100 20
EMMS-ASconresolvedor
Resolvedor 1 5,20 V 5,80 V 6,40 V 62° 17 mm 3,4 mm 75% 91 %
EMME-AS TransmisorHiperface(transmisorSEN/COS)
16 0,40 V 0,50 V 0,60 V 5,3° 1,5 mm 0,3 mm 95 % 96 %
ServomotorcontransmisorHiperfaceSKS 36 /SKM 36
TransmisorHiperface(transmisorSEN/COS)
128 0,40 V 0,50 V 0,60 V 0,7° 0,2 mm 0,04 mm 95 % 96 %
Tab. A.32 Errores de posición hasta la reacción de la supervisión de longitud de vectores así como
cobertura de diagnosis (DC) correspondiente (tolerancias limitadas)
A Apéndice técnico
270 Festo – GDCP-CAMC-G-S3-ES – 1406NH – Español
El grado de cobertura de diagnosis de la supervisión de longitud de vectores DCVL
acepta el grado total de cobertura de diagnosis para el funcionamiento del CAMC-G-S3
con el sistema de transmisores correspondiente.
No obstante, muchos errores también se detectan con seguridad incluso si la
supervisión de longitud de vector se ha ajustado de modo aproximado o se detectan
mediante otros mecanismos de detección de errores. Por ello, el DCAV total es superior al
DCVL.
Ejemplo: Resolvedor con ajuste de fábrica para la supervisión } DCVL = 37 %, pero en el
sistema se alcanza DCAV = 91 %.
NotaCompruebe su aplicación críticamente:
� ¿Qué requisitos se exigen a la precisión de la supervisión de posición y de parada?
En la elección de su sistema, tenga en cuenta las limitaciones que figuran en este
capítulo
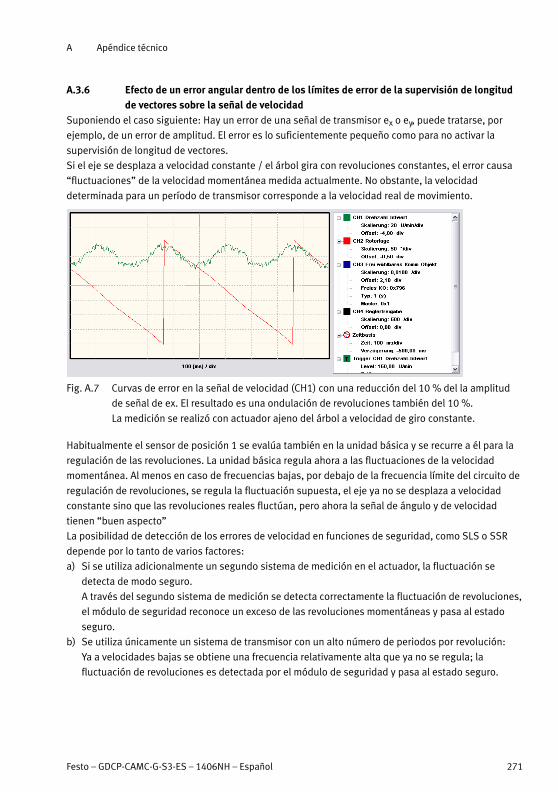
A Apéndice técnico
Festo – GDCP-CAMC-G-S3-ES – 1406NH – Español 271
A.3.6 Efecto de un error angular dentro de los límites de error de la supervisión de longitudde vectores sobre la señal de velocidad
Suponiendo el caso siguiente: Hay un error de una señal de transmisor ex o ey, puede tratarse, por
ejemplo, de un error de amplitud. El error es lo suficientemente pequeño como para no activar la
supervisión de longitud de vectores.
Si el eje se desplaza a velocidad constante / el árbol gira con revoluciones constantes, el error causa
“fluctuaciones” de la velocidad momentánea medida actualmente. No obstante, la velocidad
determinada para un período de transmisor corresponde a la velocidad real de movimiento.
Fig. A.7 Curvas de error en la señal de velocidad (CH1) con una reducción del 10 % del la amplitud
de señal de ex. El resultado es una ondulación de revoluciones también del 10 %.
La medición se realizó con actuador ajeno del árbol a velocidad de giro constante.
Habitualmente el sensor de posición 1 se evalúa también en la unidad básica y se recurre a él para la
regulación de las revoluciones. La unidad básica regula ahora a las fluctuaciones de la velocidad
momentánea. Al menos en caso de frecuencias bajas, por debajo de la frecuencia límite del circuito de
regulación de revoluciones, se regula la fluctuación supuesta, el eje ya no se desplaza a velocidad
constante sino que las revoluciones reales fluctúan, pero ahora la señal de ángulo y de velocidad
tienen “buen aspecto”
La posibilidad de detección de los errores de velocidad en funciones de seguridad, como SLS o SSR
depende por lo tanto de varios factores:
a) Si se utiliza adicionalmente un segundo sistema de medición en el actuador, la fluctuación se
detecta de modo seguro.
A través del segundo sistema de medición se detecta correctamente la fluctuación de revoluciones,
el módulo de seguridad reconoce un exceso de las revoluciones momentáneas y pasa al estado
seguro.
b) Se utiliza únicamente un sistema de transmisor con un alto número de periodos por revolución:
Ya a velocidades bajas se obtiene una frecuencia relativamente alta que ya no se regula; la
fluctuación de revoluciones es detectada por el módulo de seguridad y pasa al estado seguro.
A Apéndice técnico
272 Festo – GDCP-CAMC-G-S3-ES – 1406NH – Español
c) Se utiliza únicamente un sistema de transmisor con un número bajo de periodos por revolución:
A velocidades bajas se obtiene una frecuencia baja de la fluctuación de revoluciones, que se regula
ampliamente.
c1) El módulo de seguridad podrá detectar de modo seguro un exceso de la velocidad media
durante un periodo de transmisor.
c2) Para garantizar que las revoluciones momentáneas también sean supervisadas, es necesario
reducir el límite de supervisión.
Ejemplo para c2): Supervisión de la longitud de vectores del resolvedor con +/- 20 % => Las
revoluciones a supervisar deben reducirse con el valor de la fluctuación de revoluciones, es decir,
también en un 20 %
=> En caso de una supervisión solicitada de v = 200 mm/s se ajustará la supervisión a v = 160 mm/s.
NotaCompruebe su aplicación críticamente:
� ¿qué requerimientos se exigen a la supervisión de velocidad?
� ¿es suficiente una supervisión de la velocidad media durante una revolución de
motor?
En la elección de su sistema, tenga en cuenta las limitaciones que figuran en este
capítulo.
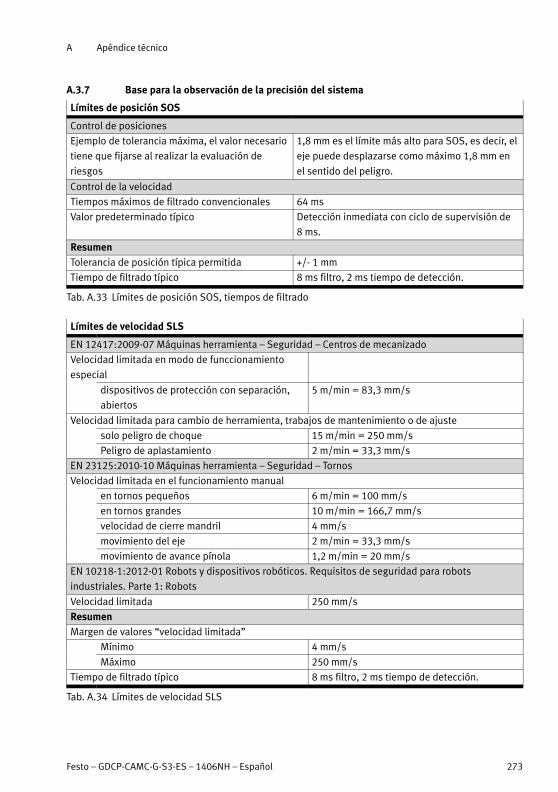
A Apéndice técnico
Festo – GDCP-CAMC-G-S3-ES – 1406NH – Español 273
A.3.7 Base para la observación de la precisión del sistema
Límites de posición SOS
Control de posiciones
Ejemplo de tolerancia máxima, el valor necesario
tiene que fijarse al realizar la evaluación de
riesgos
1,8 mm es el límite más alto para SOS, es decir, el
eje puede desplazarse como máximo 1,8 mm en
el sentido del peligro.
Control de la velocidad
Tiempos máximos de filtrado convencionales 64 ms
Valor predeterminado típico Detección inmediata con ciclo de supervisión de
8 ms.
ResumenTolerancia de posición típica permitida +/ 1 mm
Tiempo de filtrado típico 8 ms filtro, 2 ms tiempo de detección.
Tab. A.33 Límites de posición SOS, tiempos de filtrado
Límites de velocidad SLS
EN 12417:200907 Máquinas herramienta – Seguridad – Centros de mecanizado
Velocidad limitada en modo de funccionamiento
especial
dispositivos de protección con separación,
abiertos
5 m/min = 83,3 mm/s
Velocidad limitada para cambio de herramienta, trabajos de mantenimiento o de ajuste
solo peligro de choque 15 m/min = 250 mm/s
Peligro de aplastamiento 2 m/min = 33,3 mm/s
EN 23125:201010 Máquinas herramienta – Seguridad – Tornos
Velocidad limitada en el funcionamiento manual
en tornos pequeños 6 m/min = 100 mm/s
en tornos grandes 10 m/min = 166,7 mm/s
velocidad de cierre mandril 4 mm/s
movimiento del eje 2 m/min = 33,3 mm/s
movimiento de avance pínola 1,2 m/min = 20 mm/s
EN 102181:201201 Robots y dispositivos robóticos. Requisitos de seguridad para robots
industriales. Parte 1: Robots
Velocidad limitada 250 mm/s
ResumenMargen de valores “velocidad limitada”
Mínimo 4 mm/s
Máximo 250 mm/s
Tiempo de filtrado típico 8 ms filtro, 2 ms tiempo de detección.
Tab. A.34 Límites de velocidad SLS
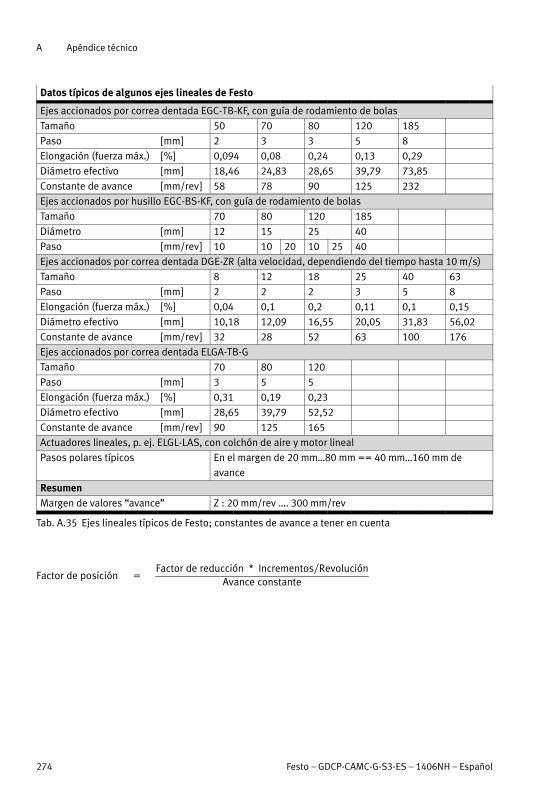
A Apéndice técnico
274 Festo – GDCP-CAMC-G-S3-ES – 1406NH – Español
Datos típicos de algunos ejes lineales de Festo
Ejes accionados por correa dentada EGC-TB-KF, con guía de rodamiento de bolas
Tamaño 50 70 80 120 185
Paso [mm] 2 3 3 5 8
Elongación (fuerza máx.) [%] 0,094 0,08 0,24 0,13 0,29
Diámetro efectivo [mm] 18,46 24,83 28,65 39,79 73,85
Constante de avance [mm/rev] 58 78 90 125 232
Ejes accionados por husillo EGC-BS-KF, con guía de rodamiento de bolas
Tamaño 70 80 120 185
Diámetro [mm] 12 15 25 40
Paso [mm/rev] 10 10 20 10 25 40
Ejes accionados por correa dentada DGEZR (alta velocidad, dependiendo del tiempo hasta 10 m/s)
Tamaño 8 12 18 25 40 63
Paso [mm] 2 2 2 3 5 8
Elongación (fuerza máx.) [%] 0,04 0,1 0,2 0,11 0,1 0,15
Diámetro efectivo [mm] 10,18 12,09 16,55 20,05 31,83 56,02
Constante de avance [mm/rev] 32 28 52 63 100 176
Ejes accionados por correa dentada ELGA-TB-G
Tamaño 70 80 120
Paso [mm] 3 5 5
Elongación (fuerza máx.) [%] 0,31 0,19 0,23
Diámetro efectivo [mm] 28,65 39,79 52,52
Constante de avance [mm/rev] 90 125 165
Actuadores lineales, p. ej. ELGL-LAS, con colchón de aire y motor lineal
Pasos polares típicos En el margen de 20 mm…80 mm == 40 mm…160 mm de
avance
ResumenMargen de valores “avance” Z : 20 mm/rev …. 300 mm/rev
Tab. A.35 Ejes lineales típicos de Festo; constantes de avance a tener en cuenta
Factor de posición �Factor de reducción * Incrementos�Revolución
Avance constante
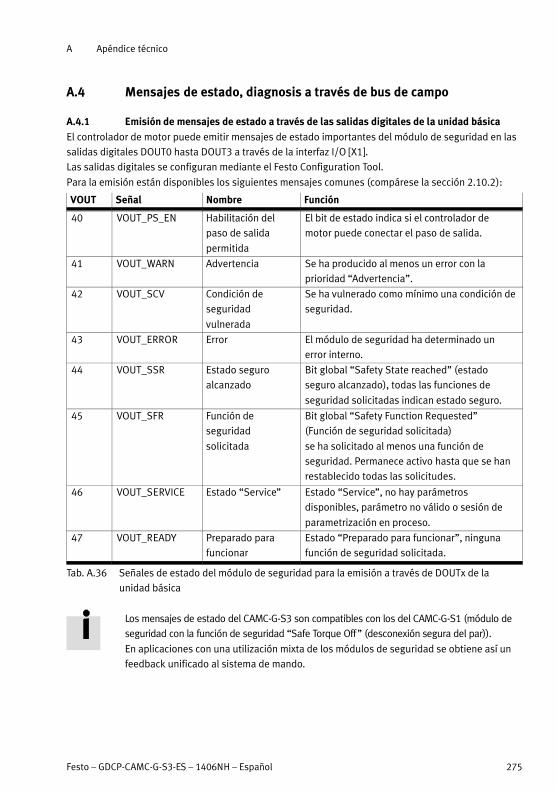
A Apéndice técnico
Festo – GDCP-CAMC-G-S3-ES – 1406NH – Español 275
A.4 Mensajes de estado, diagnosis a través de bus de campo
A.4.1 Emisión de mensajes de estado a través de las salidas digitales de la unidad básica
El controlador de motor puede emitir mensajes de estado importantes del módulo de seguridad en las
salidas digitales DOUT0 hasta DOUT3 a través de la interfaz I/O [X1].
Las salidas digitales se configuran mediante el Festo Configuration Tool.
Para la emisión están disponibles los siguientes mensajes comunes (compárese la sección 2.10.2):
VOUT Señal Nombre Función
40 VOUT_PS_EN Habilitación del
paso de salida
permitida
El bit de estado indica si el controlador de
motor puede conectar el paso de salida.
41 VOUT_WARN Advertencia Se ha producido al menos un error con la
prioridad “Advertencia”.
42 VOUT_SCV Condición de
seguridad
vulnerada
Se ha vulnerado como mínimo una condición de
seguridad.
43 VOUT_ERROR Error El módulo de seguridad ha determinado un
error interno.
44 VOUT_SSR Estado seguro
alcanzado
Bit global “Safety State reached” (estado
seguro alcanzado), todas las funciones de
seguridad solicitadas indican estado seguro.
45 VOUT_SFR Función de
seguridad
solicitada
Bit global “Safety Function Requested”
(Función de seguridad solicitada)
se ha solicitado al menos una función de
seguridad. Permanece activo hasta que se han
restablecido todas las solicitudes.
46 VOUT_SERVICE Estado “Service” Estado “Service”, no hay parámetros
disponibles, parámetro no válido o sesión de
parametrización en proceso.
47 VOUT_READY Preparado para
funcionar
Estado “Preparado para funcionar”, ninguna
función de seguridad solicitada.
Tab. A.36 Señales de estado del módulo de seguridad para la emisión a través de DOUTx de la
unidad básica
Los mensajes de estado del CAMC-G-S3 son compatibles con los del CAMC-G-S1 (módulo de
seguridad con la función de seguridad “Safe Torque Off” (desconexión segura del par)).
En aplicaciones con una utilización mixta de los módulos de seguridad se obtiene así un
feedback unificado al sistema de mando.
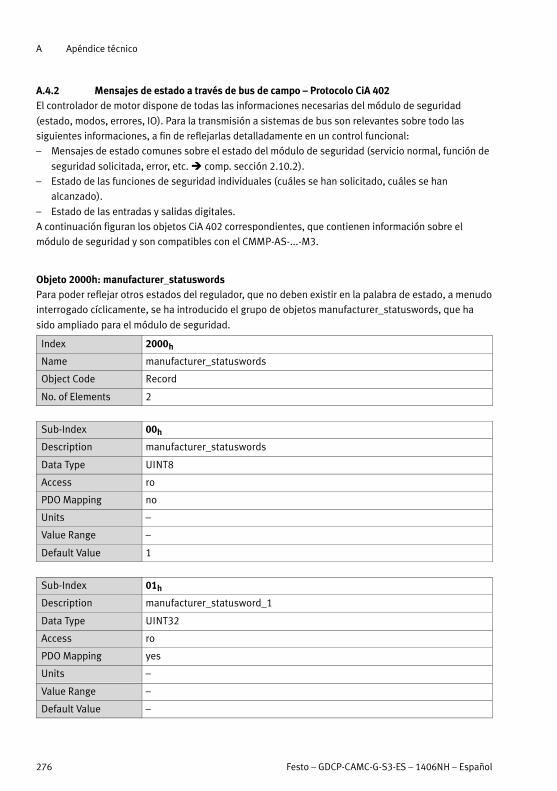
A Apéndice técnico
276 Festo – GDCP-CAMC-G-S3-ES – 1406NH – Español
A.4.2 Mensajes de estado a través de bus de campo – Protocolo CiA 402El controlador de motor dispone de todas las informaciones necesarias del módulo de seguridad
(estado, modos, errores, IO). Para la transmisión a sistemas de bus son relevantes sobre todo las
siguientes informaciones, a fin de reflejarlas detalladamente en un control funcional:
– Mensajes de estado comunes sobre el estado del módulo de seguridad (servicio normal, función de
seguridad solicitada, error, etc. � comp. sección 2.10.2).
– Estado de las funciones de seguridad individuales (cuáles se han solicitado, cuáles se han
alcanzado).
– Estado de las entradas y salidas digitales.
A continuación figuran los objetos CiA 402 correspondientes, que contienen información sobre el
módulo de seguridad y son compatibles con el CMMPAS...-M3.
Objeto 2000h: manufacturer_statuswordsPara poder reflejar otros estados del regulador, que no deben existir en la palabra de estado, a menudo
interrogado cíclicamente, se ha introducido el grupo de objetos manufacturer_statuswords, que ha
sido ampliado para el módulo de seguridad.
Index 2000h
Name manufacturer_statuswords
Object Code Record
No. of Elements 2
Sub-Index 00h
Description manufacturer_statuswords
Data Type UINT8
Access ro
PDO Mapping no
Units –
Value Range –
Default Value 1
Sub-Index 01h
Description manufacturer_statusword_1
Data Type UINT32
Access ro
PDO Mapping yes
Units –
Value Range –
Default Value –
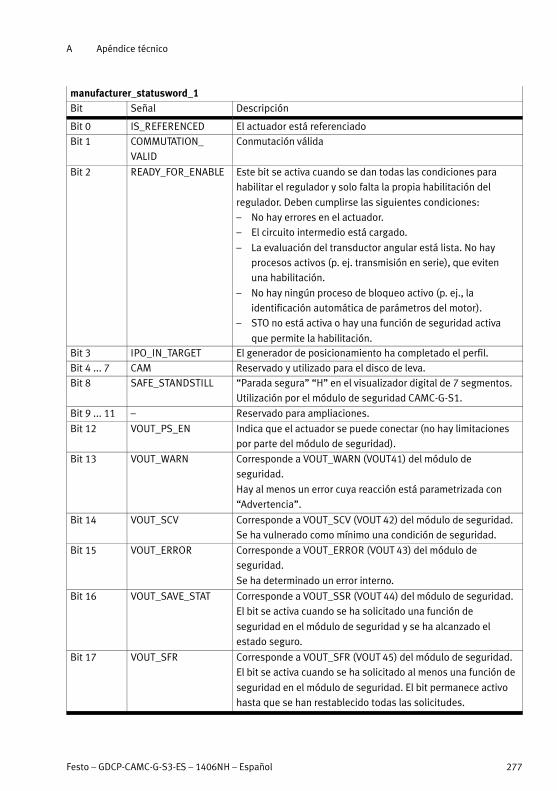
A Apéndice técnico
Festo – GDCP-CAMC-G-S3-ES – 1406NH – Español 277
manufacturer_statusword_1Bit Señal Descripción
Bit 0 IS_REFERENCED El actuador está referenciado
Bit 1 COMMUTATION_
VALID
Conmutación válida
Bit 2 READY_FOR_ENABLE Este bit se activa cuando se dan todas las condiciones para
habilitar el regulador y solo falta la propia habilitación del
regulador. Deben cumplirse las siguientes condiciones:
– No hay errores en el actuador.
– El circuito intermedio está cargado.
– La evaluación del transductor angular está lista. No hay
procesos activos (p. ej. transmisión en serie), que eviten
una habilitación.
– No hay ningún proceso de bloqueo activo (p. ej., la
identificación automática de parámetros del motor).
– STO no está activa o hay una función de seguridad activa
que permite la habilitación.Bit 3 IPO_IN_TARGET El generador de posicionamiento ha completado el perfil.
Bit 4 ... 7 CAM Reservado y utilizado para el disco de leva.
Bit 8 SAFE_STANDSTILL “Parada segura” “H” en el visualizador digital de 7 segmentos.
Utilización por el módulo de seguridad CAMC-G-S1.
Bit 9 ... 11 – Reservado para ampliaciones.
Bit 12 VOUT_PS_EN Indica que el actuador se puede conectar (no hay limitaciones
por parte del módulo de seguridad).
Bit 13 VOUT_WARN Corresponde a VOUT_WARN (VOUT41) del módulo de
seguridad.
Hay al menos un error cuya reacción está parametrizada con
“Advertencia”.
Bit 14 VOUT_SCV Corresponde a VOUT_SCV (VOUT 42) del módulo de seguridad.
Se ha vulnerado como mínimo una condición de seguridad.
Bit 15 VOUT_ERROR Corresponde a VOUT_ERROR (VOUT 43) del módulo de
seguridad.
Se ha determinado un error interno.
Bit 16 VOUT_SAVE_STAT Corresponde a VOUT_SSR (VOUT 44) del módulo de seguridad.
El bit se activa cuando se ha solicitado una función de
seguridad en el módulo de seguridad y se ha alcanzado el
estado seguro.
Bit 17 VOUT_SFR Corresponde a VOUT_SFR (VOUT 45) del módulo de seguridad.
El bit se activa cuando se ha solicitado al menos una función de
seguridad en el módulo de seguridad. El bit permanece activo
hasta que se han restablecido todas las solicitudes.
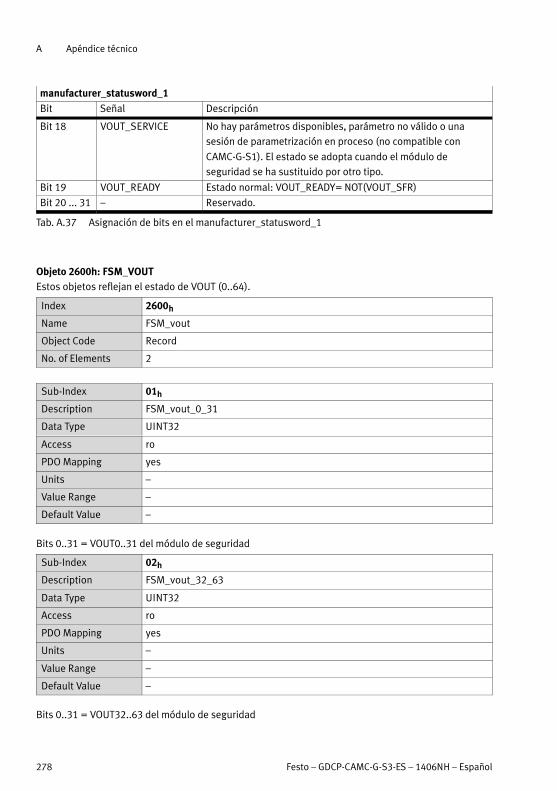
A Apéndice técnico
278 Festo – GDCP-CAMC-G-S3-ES – 1406NH – Español
manufacturer_statusword_1
Bit DescripciónSeñal
Bit 18 VOUT_SERVICE No hay parámetros disponibles, parámetro no válido o una
sesión de parametrización en proceso (no compatible con
CAMC-G-S1). El estado se adopta cuando el módulo de
seguridad se ha sustituido por otro tipo.
Bit 19 VOUT_READY Estado normal: VOUT_READY= NOT(VOUT_SFR)
Bit 20 ... 31 – Reservado.
Tab. A.37 Asignación de bits en el manufacturer_statusword_1
Objeto 2600h: FSM_VOUTEstos objetos reflejan el estado de VOUT (0..64).
Index 2600h
Name FSM_vout
Object Code Record
No. of Elements 2
Sub-Index 01h
Description FSM_vout_0_31
Data Type UINT32
Access ro
PDO Mapping yes
Units –
Value Range –
Default Value –
Bits 0..31 = VOUT0..31 del módulo de seguridad
Sub-Index 02h
Description FSM_vout_32_63
Data Type UINT32
Access ro
PDO Mapping yes
Units –
Value Range –
Default Value –
Bits 0..31 = VOUT32..63 del módulo de seguridad
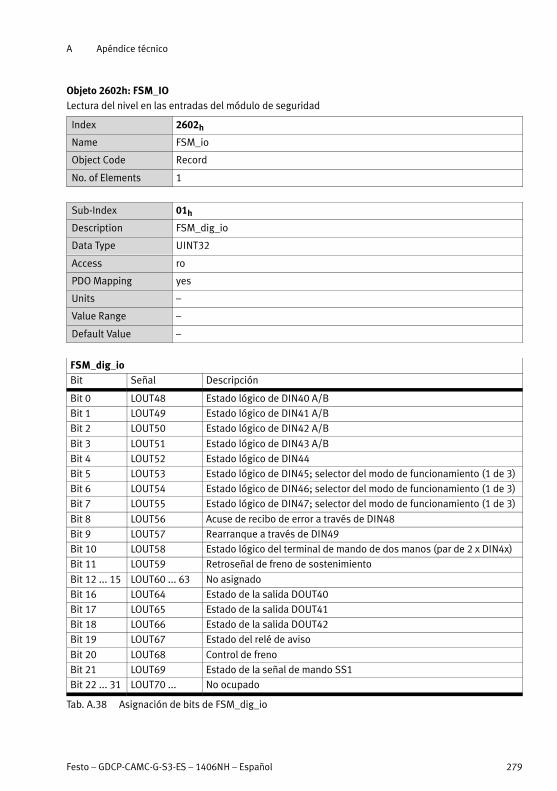
A Apéndice técnico
Festo – GDCP-CAMC-G-S3-ES – 1406NH – Español 279
Objeto 2602h: FSM_IOLectura del nivel en las entradas del módulo de seguridad
Index 2602h
Name FSM_io
Object Code Record
No. of Elements 1
Sub-Index 01h
Description FSM_dig_io
Data Type UINT32
Access ro
PDO Mapping yes
Units –
Value Range –
Default Value –
FSM_dig_ioBit Señal Descripción
Bit 0 LOUT48 Estado lógico de DIN40 A/B
Bit 1 LOUT49 Estado lógico de DIN41 A/B
Bit 2 LOUT50 Estado lógico de DIN42 A/B
Bit 3 LOUT51 Estado lógico de DIN43 A/B
Bit 4 LOUT52 Estado lógico de DIN44
Bit 5 LOUT53 Estado lógico de DIN45; selector del modo de funcionamiento (1 de 3)
Bit 6 LOUT54 Estado lógico de DIN46; selector del modo de funcionamiento (1 de 3)
Bit 7 LOUT55 Estado lógico de DIN47; selector del modo de funcionamiento (1 de 3)
Bit 8 LOUT56 Acuse de recibo de error a través de DIN48
Bit 9 LOUT57 Rearranque a través de DIN49
Bit 10 LOUT58 Estado lógico del terminal de mando de dos manos (par de 2 x DIN4x)
Bit 11 LOUT59 Retroseñal de freno de sostenimiento
Bit 12 ... 15 LOUT60 ... 63 No asignado
Bit 16 LOUT64 Estado de la salida DOUT40
Bit 17 LOUT65 Estado de la salida DOUT41
Bit 18 LOUT66 Estado de la salida DOUT42
Bit 19 LOUT67 Estado del relé de aviso
Bit 20 LOUT68 Control de freno
Bit 21 LOUT69 Estado de la señal de mando SS1
Bit 22 ... 31 LOUT70 ... No ocupado
Tab. A.38 Asignación de bits de FSM_dig_io
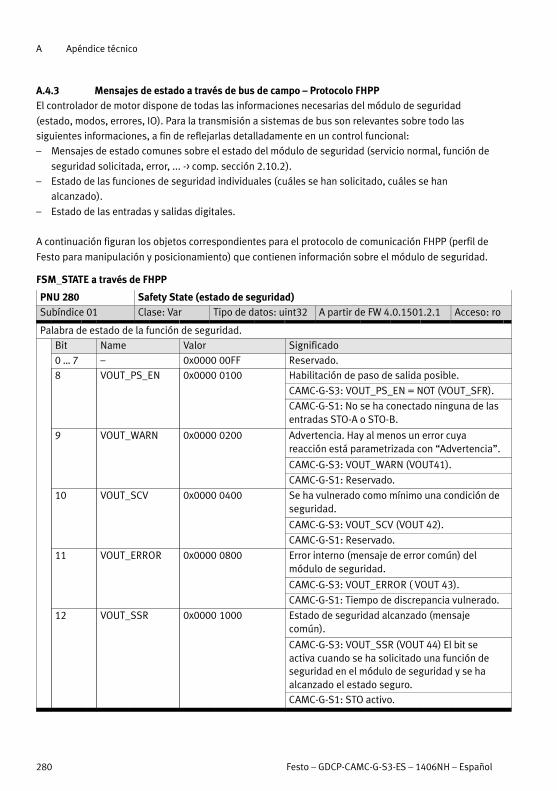
A Apéndice técnico
280 Festo – GDCP-CAMC-G-S3-ES – 1406NH – Español
A.4.3 Mensajes de estado a través de bus de campo – Protocolo FHPPEl controlador de motor dispone de todas las informaciones necesarias del módulo de seguridad
(estado, modos, errores, IO). Para la transmisión a sistemas de bus son relevantes sobre todo las
siguientes informaciones, a fin de reflejarlas detalladamente en un control funcional:
– Mensajes de estado comunes sobre el estado del módulo de seguridad (servicio normal, función de
seguridad solicitada, error, ... -> comp. sección 2.10.2).
– Estado de las funciones de seguridad individuales (cuáles se han solicitado, cuáles se han
alcanzado).
– Estado de las entradas y salidas digitales.
A continuación figuran los objetos correspondientes para el protocolo de comunicación FHPP (perfil de
Festo para manipulación y posicionamiento) que contienen información sobre el módulo de seguridad.
FSM_STATE a través de FHPP
PNU 280 Safety State (estado de seguridad)Subíndice 01 Clase: Var Tipo de datos: uint32 A partir de FW 4.0.1501.2.1 Acceso: ro
Palabra de estado de la función de seguridad.
Bit Name Valor Significado
0 … 7 – 0x0000 00FF Reservado.
8 VOUT_PS_EN 0x0000 0100 Habilitación de paso de salida posible.
CAMC-G-S3: VOUT_PS_EN = NOT (VOUT_SFR).
CAMC-G-S1: No se ha conectado ninguna de lasentradas STO-A o STO-B.
9 VOUT_WARN 0x0000 0200 Advertencia. Hay al menos un error cuyareacción está parametrizada con “Advertencia”.
CAMC-G-S3: VOUT_WARN (VOUT41).
CAMC-G-S1: Reservado.
10 VOUT_SCV 0x0000 0400 Se ha vulnerado como mínimo una condición deseguridad.
CAMC-G-S3: VOUT_SCV (VOUT 42).
CAMC-G-S1: Reservado.
11 VOUT_ERROR 0x0000 0800 Error interno (mensaje de error común) delmódulo de seguridad.
CAMC-G-S3: VOUT_ERROR ( VOUT 43).
CAMC-G-S1: Tiempo de discrepancia vulnerado.
12 VOUT_SSR 0x0000 1000 Estado de seguridad alcanzado (mensajecomún).
CAMC-G-S3: VOUT_SSR (VOUT 44) El bit seactiva cuando se ha solicitado una función deseguridad en el módulo de seguridad y se haalcanzado el estado seguro.
CAMC-G-S1: STO activo.
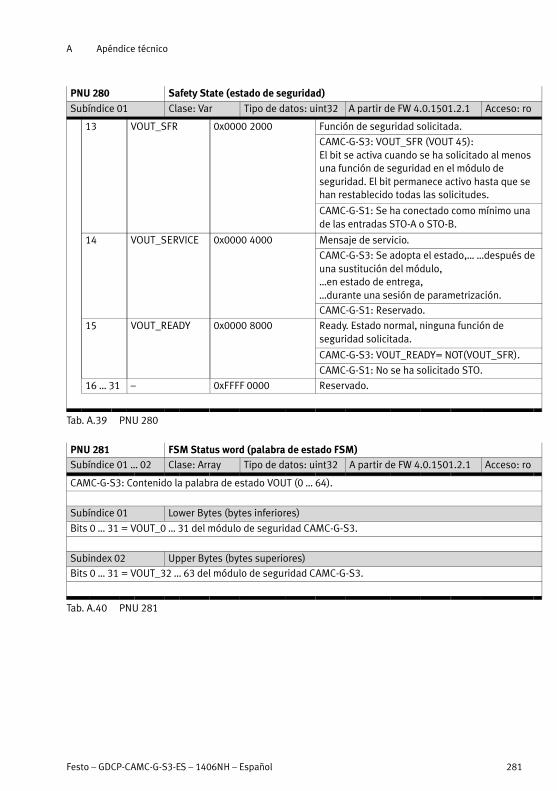
A Apéndice técnico
Festo – GDCP-CAMC-G-S3-ES – 1406NH – Español 281
PNU 280 Safety State (estado de seguridad)
Acceso: roA partir de FW 4.0.1501.2.1Tipo de datos: uint32Clase: VarSubíndice 01
13 VOUT_SFR 0x0000 2000 Función de seguridad solicitada.
CAMC-G-S3: VOUT_SFR (VOUT 45): El bit se activa cuando se ha solicitado al menosuna función de seguridad en el módulo deseguridad. El bit permanece activo hasta que sehan restablecido todas las solicitudes.
CAMC-G-S1: Se ha conectado como mínimo unade las entradas STO-A o STO-B.
14 VOUT_SERVICE 0x0000 4000 Mensaje de servicio.
CAMC-G-S3: Se adopta el estado,… …después deuna sustitución del módulo,…en estado de entrega,…durante una sesión de parametrización.
CAMC-G-S1: Reservado.
15 VOUT_READY 0x0000 8000 Ready. Estado normal, ninguna función deseguridad solicitada.
CAMC-G-S3: VOUT_READY= NOT(VOUT_SFR).
CAMC-G-S1: No se ha solicitado STO.
16 … 31 – 0xFFFF 0000 Reservado.
Tab. A.39 PNU 280
PNU 281 FSM Status word (palabra de estado FSM)Subíndice 01 … 02 Clase: Array Tipo de datos: uint32 A partir de FW 4.0.1501.2.1 Acceso: ro
CAMC-G-S3: Contenido la palabra de estado VOUT (0 … 64).
Subíndice 01 Lower Bytes (bytes inferiores)
Bits 0 … 31 = VOUT_0 … 31 del módulo de seguridad CAMC-G-S3.
Subindex 02 Upper Bytes (bytes superiores)
Bits 0 … 31 = VOUT_32 … 63 del módulo de seguridad CAMC-G-S3.
Tab. A.40 PNU 281
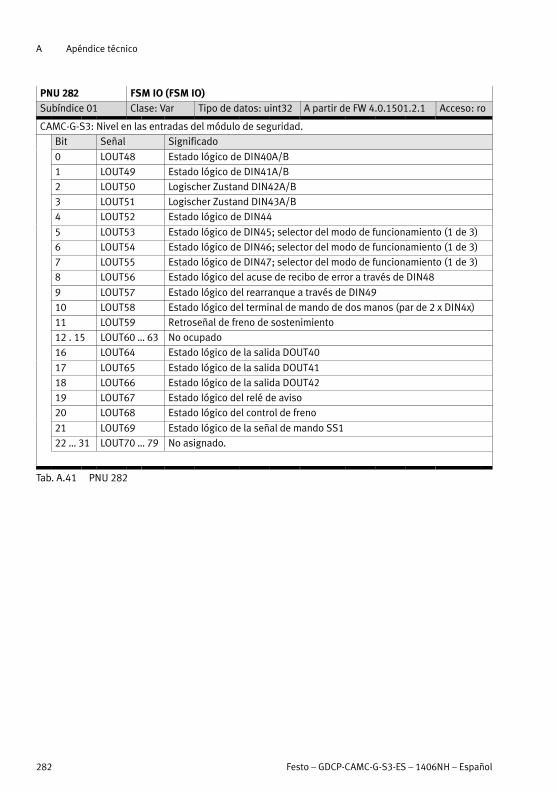
A Apéndice técnico
282 Festo – GDCP-CAMC-G-S3-ES – 1406NH – Español
PNU 282 FSM IO (FSM IO)Subíndice 01 Clase: Var Tipo de datos: uint32 A partir de FW 4.0.1501.2.1 Acceso: ro
CAMC-G-S3: Nivel en las entradas del módulo de seguridad.
Bit Señal Significado
0 LOUT48 Estado lógico de DIN40A/B
1 LOUT49 Estado lógico de DIN41A/B
2 LOUT50 Logischer Zustand DIN42A/B
3 LOUT51 Logischer Zustand DIN43A/B
4 LOUT52 Estado lógico de DIN44
5 LOUT53 Estado lógico de DIN45; selector del modo de funcionamiento (1 de 3)
6 LOUT54 Estado lógico de DIN46; selector del modo de funcionamiento (1 de 3)
7 LOUT55 Estado lógico de DIN47; selector del modo de funcionamiento (1 de 3)
8 LOUT56 Estado lógico del acuse de recibo de error a través de DIN48
9 LOUT57 Estado lógico del rearranque a través de DIN49
10 LOUT58 Estado lógico del terminal de mando de dos manos (par de 2 x DIN4x)
11 LOUT59 Retroseñal de freno de sostenimiento
12 . 15 LOUT60 … 63 No ocupado
16 LOUT64 Estado lógico de la salida DOUT40
17 LOUT65 Estado lógico de la salida DOUT41
18 LOUT66 Estado lógico de la salida DOUT42
19 LOUT67 Estado lógico del relé de aviso
20 LOUT68 Estado lógico del control de freno
21 LOUT69 Estado lógico de la señal de mando SS1
22 … 31 LOUT70 … 79 No asignado.
Tab. A.41 PNU 282
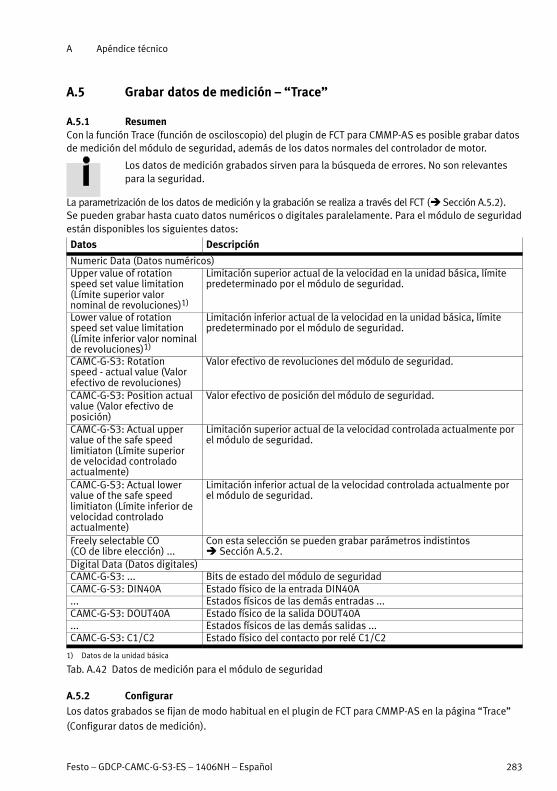
A Apéndice técnico
Festo – GDCP-CAMC-G-S3-ES – 1406NH – Español 283
A.5 Grabar datos de medición – “Trace”
A.5.1 ResumenCon la función Trace (función de osciloscopio) del plugin de FCT para CMMP-AS es posible grabar datosde medición del módulo de seguridad, además de los datos normales del controlador de motor.
Los datos de medición grabados sirven para la búsqueda de errores. No son relevantespara la seguridad.
La parametrización de los datos de medición y la grabación se realiza a través del FCT (� Sección A.5.2).Se pueden grabar hasta cuato datos numéricos o digitales paralelamente. Para el módulo de seguridadestán disponibles los siguientes datos:
Datos Descripción
Numeric Data (Datos numéricos)Upper value of rotationspeed set value limitation(Límite superior valornominal de revoluciones)1)
Limitación superior actual de la velocidad en la unidad básica, límitepredeterminado por el módulo de seguridad.
Lower value of rotationspeed set value limitation(Límite inferior valor nominalde revoluciones)1)
Limitación inferior actual de la velocidad en la unidad básica, límitepredeterminado por el módulo de seguridad.
CAMC-G-S3: Rotationspeed - actual value (Valorefectivo de revoluciones)
Valor efectivo de revoluciones del módulo de seguridad.
CAMC-G-S3: Position actualvalue (Valor efectivo deposición)
Valor efectivo de posición del módulo de seguridad.
CAMC-G-S3: Actual uppervalue of the safe speedlimitiaton (Límite superiorde velocidad controladoactualmente)
Limitación superior actual de la velocidad controlada actualmente porel módulo de seguridad.
CAMC-G-S3: Actual lowervalue of the safe speedlimitiaton (Límite inferior develocidad controladoactualmente)
Limitación inferior actual de la velocidad controlada actualmente porel módulo de seguridad.
Freely selectable CO (CO de libre elección) ...
Con esta selección se pueden grabar parámetros indistintos� Sección A.5.2.
Digital Data (Datos digitales)CAMC-G-S3: ... Bits de estado del módulo de seguridadCAMC-G-S3: DIN40A Estado físico de la entrada DIN40A... Estados físicos de las demás entradas ...CAMC-G-S3: DOUT40A Estado físico de la salida DOUT40A... Estados físicos de las demás salidas ...CAMC-G-S3: C1/C2 Estado físico del contacto por relé C1/C2
1) Datos de la unidad básica
Tab. A.42 Datos de medición para el módulo de seguridad
A.5.2 Configurar
Los datos grabados se fijan de modo habitual en el plugin de FCT para CMMP-AS en la página “Trace”
(Configurar datos de medición).
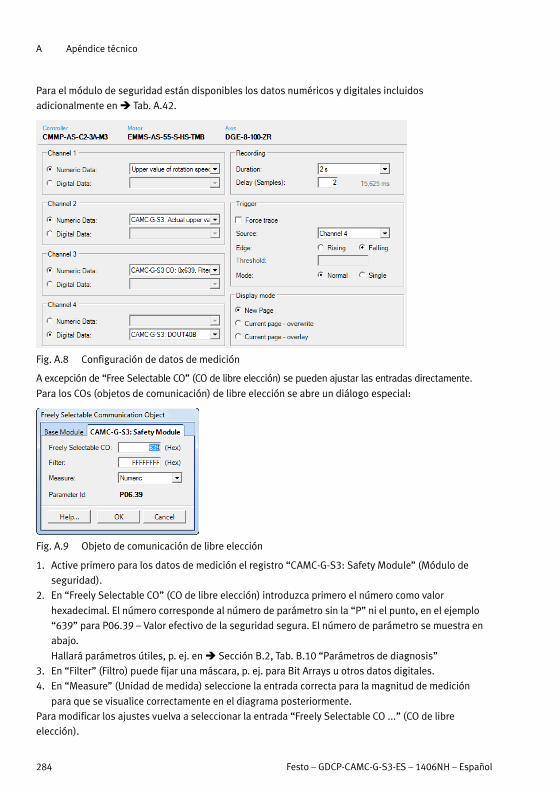
A Apéndice técnico
284 Festo – GDCP-CAMC-G-S3-ES – 1406NH – Español
Para el módulo de seguridad están disponibles los datos numéricos y digitales incluidos
adicionalmente en � Tab. A.42.
Fig. A.8 Configuración de datos de medición
A excepción de “Free Selectable CO” (CO de libre elección) se pueden ajustar las entradas directamente.
Para los COs (objetos de comunicación) de libre elección se abre un diálogo especial:
Fig. A.9 Objeto de comunicación de libre elección
1. Active primero para los datos de medición el registro “CAMC-G-S3: Safety Module” (Módulo de
seguridad).
2. En “Freely Selectable CO” (CO de libre elección) introduzca primero el número como valor
hexadecimal. El número corresponde al número de parámetro sin la “P” ni el punto, en el ejemplo
“639” para P06.39 – Valor efectivo de la seguridad segura. El número de parámetro se muestra en
abajo.
Hallará parámetros útiles, p. ej. en � Sección B.2, Tab. B.10 “Parámetros de diagnosis”
3. En “Filter” (Filtro) puede fijar una máscara, p. ej. para Bit Arrays u otros datos digitales.
4. En “Measure” (Unidad de medida) seleccione la entrada correcta para la magnitud de medición
para que se visualice correctamente en el diagrama posteriormente.
Para modificar los ajustes vuelva a seleccionar la entrada “Freely Selectable CO ...” (CO de libre
elección).
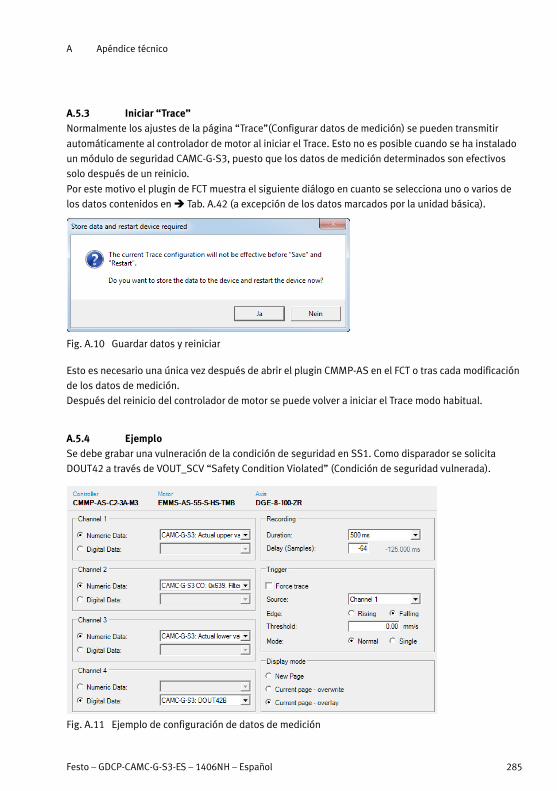
A Apéndice técnico
Festo – GDCP-CAMC-G-S3-ES – 1406NH – Español 285
A.5.3 Iniciar “Trace”Normalmente los ajustes de la página “Trace”(Configurar datos de medición) se pueden transmitir
automáticamente al controlador de motor al iniciar el Trace. Esto no es posible cuando se ha instalado
un módulo de seguridad CAMC-G-S3, puesto que los datos de medición determinados son efectivos
solo después de un reinicio.
Por este motivo el plugin de FCT muestra el siguiente diálogo en cuanto se selecciona uno o varios de
los datos contenidos en � Tab. A.42 (a excepción de los datos marcados por la unidad básica).
Fig. A.10 Guardar datos y reiniciar
Esto es necesario una única vez después de abrir el plugin CMMP-AS en el FCT o tras cada modificación
de los datos de medición.
Después del reinicio del controlador de motor se puede volver a iniciar el Trace modo habitual.
A.5.4 EjemploSe debe grabar una vulneración de la condición de seguridad en SS1. Como disparador se solicita
DOUT42 a través de VOUT_SCV “Safety Condition Violated” (Condición de seguridad vulnerada).
Fig. A.11 Ejemplo de configuración de datos de medición
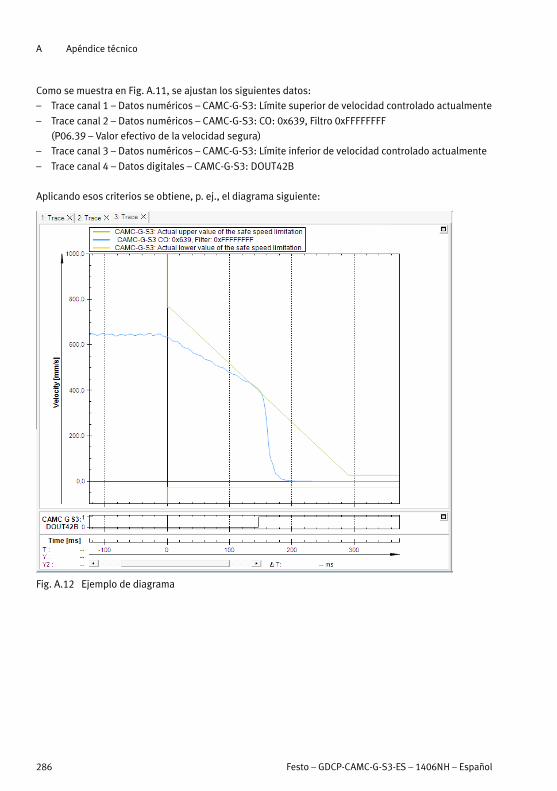
A Apéndice técnico
286 Festo – GDCP-CAMC-G-S3-ES – 1406NH – Español
Como se muestra en Fig. A.11, se ajustan los siguientes datos:
– Trace canal 1 – Datos numéricos – CAMC-G-S3: Límite superior de velocidad controlado actualmente
– Trace canal 2 – Datos numéricos – CAMC-G-S3: CO: 0x639, Filtro 0xFFFFFFFF
(P06.39 – Valor efectivo de la velocidad segura)
– Trace canal 3 – Datos numéricos – CAMC-G-S3: Límite inferior de velocidad controlado actualmente
– Trace canal 4 – Datos digitales – CAMC-G-S3: DOUT42B
Aplicando esos criterios se obtiene, p. ej., el diagrama siguiente:
Fig. A.12 Ejemplo de diagrama
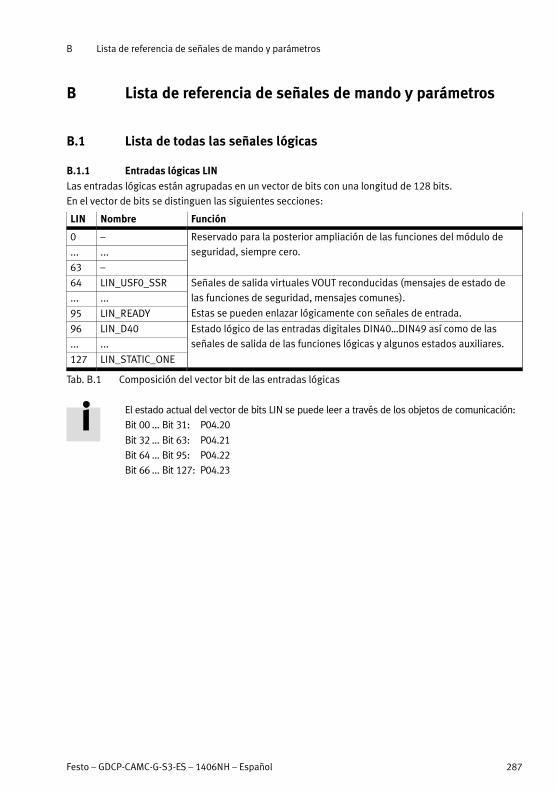
B Lista de referencia de señales de mando y parámetros
Festo – GDCP-CAMC-G-S3-ES – 1406NH – Español 287
B Lista de referencia de señales de mando y parámetros
B.1 Lista de todas las señales lógicas
B.1.1 Entradas lógicas LIN
Las entradas lógicas están agrupadas en un vector de bits con una longitud de 128 bits.
En el vector de bits se distinguen las siguientes secciones:
LIN Nombre Función
0 – Reservado para la posterior ampliación de las funciones del módulo de
seguridad, siempre cero.... ...
63 –
64 LIN_USF0_SSR Señales de salida virtuales VOUT reconducidas (mensajes de estado de
las funciones de seguridad, mensajes comunes).
Estas se pueden enlazar lógicamente con señales de entrada.
... ...
95 LIN_READY
96 LIN_D40 Estado lógico de las entradas digitales DIN40…DIN49 así como de las
señales de salida de las funciones lógicas y algunos estados auxiliares.... ...
127 LIN_STATIC_ONE
Tab. B.1 Composición del vector bit de las entradas lógicas
El estado actual del vector de bits LIN se puede leer a través de los objetos de comunicación:
Bit 00 ... Bit 31: P04.20
Bit 32 ... Bit 63: P04.21
Bit 64 ... Bit 95: P04.22
Bit 66 ... Bit 127: P04.23
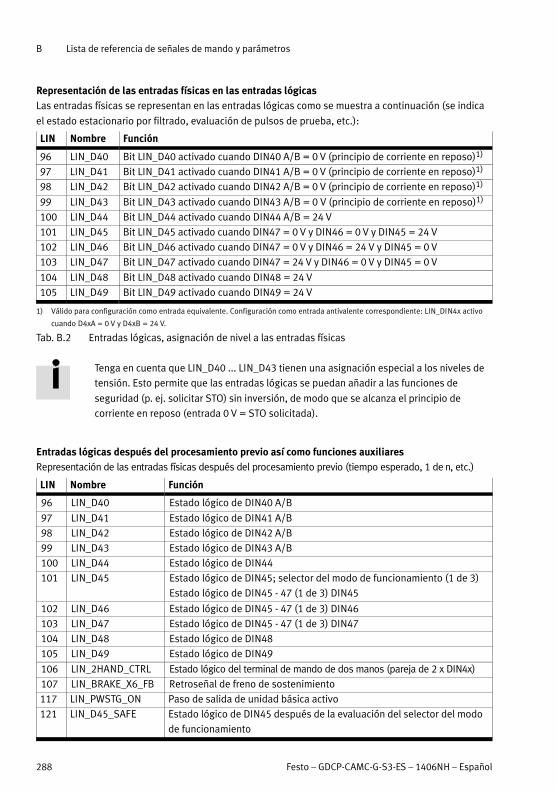
B Lista de referencia de señales de mando y parámetros
288 Festo – GDCP-CAMC-G-S3-ES – 1406NH – Español
Representación de las entradas físicas en las entradas lógicasLas entradas físicas se representan en las entradas lógicas como se muestra a continuación (se indica
el estado estacionario por filtrado, evaluación de pulsos de prueba, etc.):
LIN Nombre Función
96 LIN_D40 Bit LIN_D40 activado cuando DIN40 A/B = 0 V (principio de corriente en reposo)1)
97 LIN_D41 Bit LIN_D41 activado cuando DIN41 A/B = 0 V (principio de corriente en reposo)1)
98 LIN_D42 Bit LIN_D42 activado cuando DIN42 A/B = 0 V (principio de corriente en reposo)1)
99 LIN_D43 Bit LIN_D43 activado cuando DIN43 A/B = 0 V (principio de corriente en reposo)1)
100 LIN_D44 Bit LIN_D44 activado cuando DIN44 A/B = 24 V
101 LIN_D45 Bit LIN_D45 activado cuando DIN47 = 0 V y DIN46 = 0 V y DIN45 = 24 V
102 LIN_D46 Bit LIN_D46 activado cuando DIN47 = 0 V y DIN46 = 24 V y DIN45 = 0 V
103 LIN_D47 Bit LIN_D47 activado cuando DIN47 = 24 V y DIN46 = 0 V y DIN45 = 0 V
104 LIN_D48 Bit LIN_D48 activado cuando DIN48 = 24 V
105 LIN_D49 Bit LIN_D49 activado cuando DIN49 = 24 V
1) Válido para configuración como entrada equivalente. Configuración como entrada antivalente correspondiente: LIN_DIN4x activo
cuando D4xA = 0 V y D4xB = 24 V.
Tab. B.2 Entradas lógicas, asignación de nivel a las entradas físicas
Tenga en cuenta que LIN_D40 ... LIN_D43 tienen una asignación especial a los niveles de
tensión. Esto permite que las entradas lógicas se puedan añadir a las funciones de
seguridad (p. ej. solicitar STO) sin inversión, de modo que se alcanza el principio de
corriente en reposo (entrada 0 V = STO solicitada).
Entradas lógicas después del procesamiento previo así como funciones auxiliaresRepresentación de las entradas físicas después del procesamiento previo (tiempo esperado, 1 de n, etc.)
LIN Nombre Función
96 LIN_D40 Estado lógico de DIN40 A/B
97 LIN_D41 Estado lógico de DIN41 A/B
98 LIN_D42 Estado lógico de DIN42 A/B
99 LIN_D43 Estado lógico de DIN43 A/B
100 LIN_D44 Estado lógico de DIN44
101 LIN_D45 Estado lógico de DIN45; selector del modo de funcionamiento (1 de 3)
Estado lógico de DIN45 47 (1 de 3) DIN45
102 LIN_D46 Estado lógico de DIN45 47 (1 de 3) DIN46
103 LIN_D47 Estado lógico de DIN45 47 (1 de 3) DIN47
104 LIN_D48 Estado lógico de DIN48
105 LIN_D49 Estado lógico de DIN49
106 LIN_2HAND_CTRL Estado lógico del terminal de mando de dos manos (pareja de 2 x DIN4x)
107 LIN_BRAKE_X6_FB Retroseñal de freno de sostenimiento
117 LIN_PWSTG_ON Paso de salida de unidad básica activo
121 LIN_D45_SAFE Estado lógico de DIN45 después de la evaluación del selector del modo
de funcionamiento
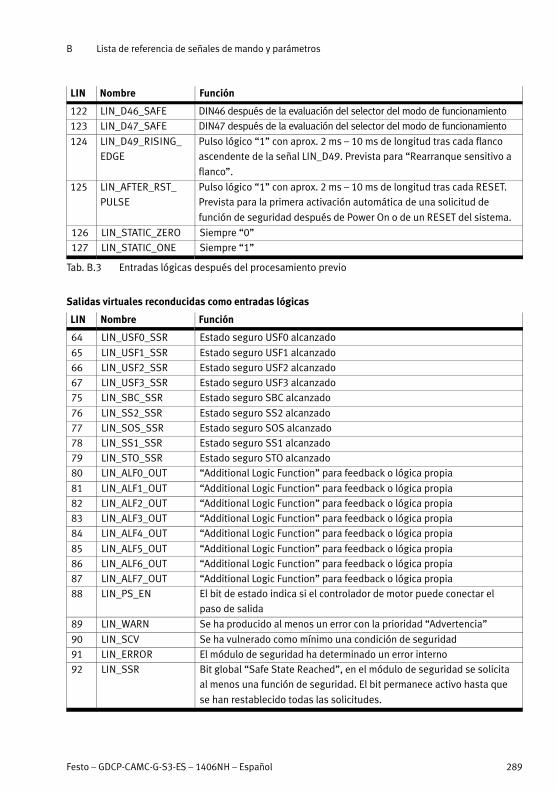
B Lista de referencia de señales de mando y parámetros
Festo – GDCP-CAMC-G-S3-ES – 1406NH – Español 289
LIN FunciónNombre
122 LIN_D46_SAFE DIN46 después de la evaluación del selector del modo de funcionamiento
123 LIN_D47_SAFE DIN47 después de la evaluación del selector del modo de funcionamiento
124 LIN_D49_RISING_
EDGE
Pulso lógico “1” con aprox. 2 ms – 10 ms de longitud tras cada flanco
ascendente de la señal LIN_D49. Prevista para “Rearranque sensitivo a
flanco”.
125 LIN_AFTER_RST_
PULSE
Pulso lógico “1” con aprox. 2 ms – 10 ms de longitud tras cada RESET.
Prevista para la primera activación automática de una solicitud de
función de seguridad después de Power On o de un RESET del sistema.
126 LIN_STATIC_ZERO Siempre “0”
127 LIN_STATIC_ONE Siempre “1”
Tab. B.3 Entradas lógicas después del procesamiento previo
Salidas virtuales reconducidas como entradas lógicas
LIN Nombre Función
64 LIN_USF0_SSR Estado seguro USF0 alcanzado
65 LIN_USF1_SSR Estado seguro USF1 alcanzado
66 LIN_USF2_SSR Estado seguro USF2 alcanzado
67 LIN_USF3_SSR Estado seguro USF3 alcanzado
75 LIN_SBC_SSR Estado seguro SBC alcanzado
76 LIN_SS2_SSR Estado seguro SS2 alcanzado
77 LIN_SOS_SSR Estado seguro SOS alcanzado
78 LIN_SS1_SSR Estado seguro SS1 alcanzado
79 LIN_STO_SSR Estado seguro STO alcanzado
80 LIN_ALF0_OUT “Additional Logic Function” para feedback o lógica propia
81 LIN_ALF1_OUT “Additional Logic Function” para feedback o lógica propia
82 LIN_ALF2_OUT “Additional Logic Function” para feedback o lógica propia
83 LIN_ALF3_OUT “Additional Logic Function” para feedback o lógica propia
84 LIN_ALF4_OUT “Additional Logic Function” para feedback o lógica propia
85 LIN_ALF5_OUT “Additional Logic Function” para feedback o lógica propia
86 LIN_ALF6_OUT “Additional Logic Function” para feedback o lógica propia
87 LIN_ALF7_OUT “Additional Logic Function” para feedback o lógica propia
88 LIN_PS_EN El bit de estado indica si el controlador de motor puede conectar el
paso de salida
89 LIN_WARN Se ha producido al menos un error con la prioridad “Advertencia”
90 LIN_SCV Se ha vulnerado como mínimo una condición de seguridad
91 LIN_ERROR El módulo de seguridad ha determinado un error interno
92 LIN_SSR Bit global “Safe State Reached”, en el módulo de seguridad se solicita
al menos una función de seguridad. El bit permanece activo hasta que
se han restablecido todas las solicitudes.
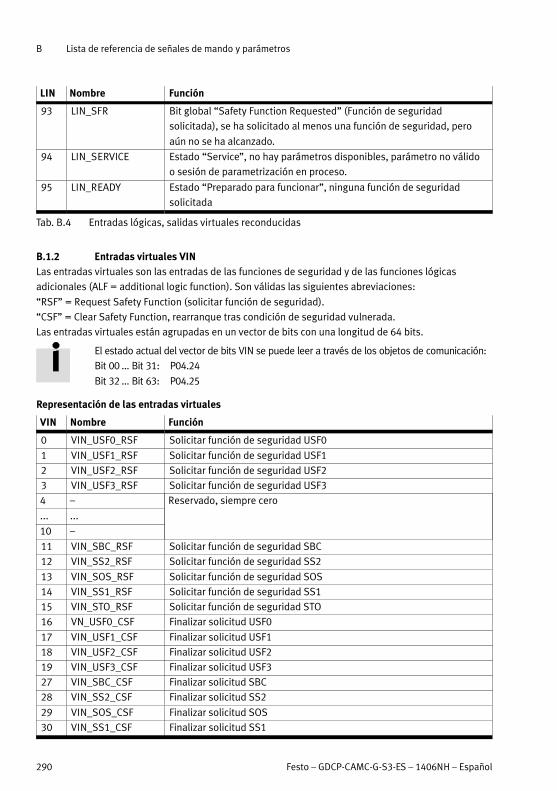
B Lista de referencia de señales de mando y parámetros
290 Festo – GDCP-CAMC-G-S3-ES – 1406NH – Español
LIN FunciónNombre
93 LIN_SFR Bit global “Safety Function Requested” (Función de seguridad
solicitada), se ha solicitado al menos una función de seguridad, pero
aún no se ha alcanzado.
94 LIN_SERVICE Estado “Service”, no hay parámetros disponibles, parámetro no válido
o sesión de parametrización en proceso.
95 LIN_READY Estado “Preparado para funcionar”, ninguna función de seguridad
solicitada
Tab. B.4 Entradas lógicas, salidas virtuales reconducidas
B.1.2 Entradas virtuales VINLas entradas virtuales son las entradas de las funciones de seguridad y de las funciones lógicas
adicionales (ALF = additional logic function). Son válidas las siguientes abreviaciones:
“RSF” = Request Safety Function (solicitar función de seguridad).
“CSF” = Clear Safety Function, rearranque tras condición de seguridad vulnerada.
Las entradas virtuales están agrupadas en un vector de bits con una longitud de 64 bits.
El estado actual del vector de bits VIN se puede leer a través de los objetos de comunicación:
Bit 00 ... Bit 31: P04.24
Bit 32 ... Bit 63: P04.25
Representación de las entradas virtuales
VIN Nombre Función
0 VIN_USF0_RSF Solicitar función de seguridad USF0
1 VIN_USF1_RSF Solicitar función de seguridad USF1
2 VIN_USF2_RSF Solicitar función de seguridad USF2
3 VIN_USF3_RSF Solicitar función de seguridad USF3
4 – Reservado, siempre cero
... ...
10 –
11 VIN_SBC_RSF Solicitar función de seguridad SBC
12 VIN_SS2_RSF Solicitar función de seguridad SS2
13 VIN_SOS_RSF Solicitar función de seguridad SOS
14 VIN_SS1_RSF Solicitar función de seguridad SS1
15 VIN_STO_RSF Solicitar función de seguridad STO
16 VN_USF0_CSF Finalizar solicitud USF0
17 VIN_USF1_CSF Finalizar solicitud USF1
18 VIN_USF2_CSF Finalizar solicitud USF2
19 VIN_USF3_CSF Finalizar solicitud USF3
27 VIN_SBC_CSF Finalizar solicitud SBC
28 VIN_SS2_CSF Finalizar solicitud SS2
29 VIN_SOS_CSF Finalizar solicitud SOS
30 VIN_SS1_CSF Finalizar solicitud SS1
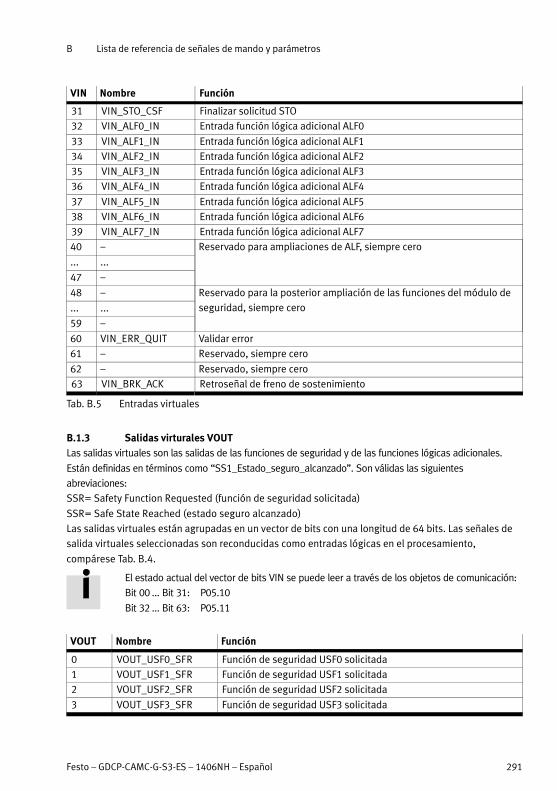
B Lista de referencia de señales de mando y parámetros
Festo – GDCP-CAMC-G-S3-ES – 1406NH – Español 291
VIN FunciónNombre
31 VIN_STO_CSF Finalizar solicitud STO
32 VIN_ALF0_IN Entrada función lógica adicional ALF0
33 VIN_ALF1_IN Entrada función lógica adicional ALF1
34 VIN_ALF2_IN Entrada función lógica adicional ALF2
35 VIN_ALF3_IN Entrada función lógica adicional ALF3
36 VIN_ALF4_IN Entrada función lógica adicional ALF4
37 VIN_ALF5_IN Entrada función lógica adicional ALF5
38 VIN_ALF6_IN Entrada función lógica adicional ALF6
39 VIN_ALF7_IN Entrada función lógica adicional ALF7
40 – Reservado para ampliaciones de ALF, siempre cero
... ...
47 –
48 – Reservado para la posterior ampliación de las funciones del módulo de
seguridad, siempre cero... ...
59 –
60 VIN_ERR_QUIT Validar error
61 – Reservado, siempre cero
62 – Reservado, siempre cero
63 VIN_BRK_ACK Retroseñal de freno de sostenimiento
Tab. B.5 Entradas virtuales
B.1.3 Salidas virturales VOUTLas salidas virtuales son las salidas de las funciones de seguridad y de las funciones lógicas adicionales.
Están definidas en términos como “SS1_Estado_seguro_alcanzado”. Son válidas las siguientes
abreviaciones:
SSR= Safety Function Requested (función de seguridad solicitada)
SSR= Safe State Reached (estado seguro alcanzado)
Las salidas virtuales están agrupadas en un vector de bits con una longitud de 64 bits. Las señales de
salida virtuales seleccionadas son reconducidas como entradas lógicas en el procesamiento,
compárese Tab. B.4.
El estado actual del vector de bits VIN se puede leer a través de los objetos de comunicación:
Bit 00 ... Bit 31: P05.10
Bit 32 ... Bit 63: P05.11
VOUT Nombre Función
0 VOUT_USF0_SFR Función de seguridad USF0 solicitada
1 VOUT_USF1_SFR Función de seguridad USF1 solicitada
2 VOUT_USF2_SFR Función de seguridad USF2 solicitada
3 VOUT_USF3_SFR Función de seguridad USF3 solicitada
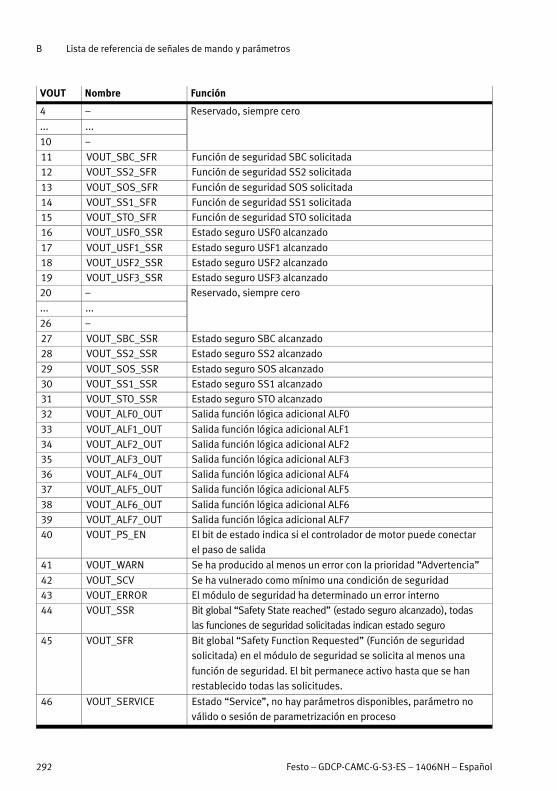
B Lista de referencia de señales de mando y parámetros
292 Festo – GDCP-CAMC-G-S3-ES – 1406NH – Español
VOUT FunciónNombre
4 – Reservado, siempre cero
... ...
10 –
11 VOUT_SBC_SFR Función de seguridad SBC solicitada
12 VOUT_SS2_SFR Función de seguridad SS2 solicitada
13 VOUT_SOS_SFR Función de seguridad SOS solicitada
14 VOUT_SS1_SFR Función de seguridad SS1 solicitada
15 VOUT_STO_SFR Función de seguridad STO solicitada
16 VOUT_USF0_SSR Estado seguro USF0 alcanzado
17 VOUT_USF1_SSR Estado seguro USF1 alcanzado
18 VOUT_USF2_SSR Estado seguro USF2 alcanzado
19 VOUT_USF3_SSR Estado seguro USF3 alcanzado
20 – Reservado, siempre cero
... ...
26 –
27 VOUT_SBC_SSR Estado seguro SBC alcanzado
28 VOUT_SS2_SSR Estado seguro SS2 alcanzado
29 VOUT_SOS_SSR Estado seguro SOS alcanzado
30 VOUT_SS1_SSR Estado seguro SS1 alcanzado
31 VOUT_STO_SSR Estado seguro STO alcanzado
32 VOUT_ALF0_OUT Salida función lógica adicional ALF0
33 VOUT_ALF1_OUT Salida función lógica adicional ALF1
34 VOUT_ALF2_OUT Salida función lógica adicional ALF2
35 VOUT_ALF3_OUT Salida función lógica adicional ALF3
36 VOUT_ALF4_OUT Salida función lógica adicional ALF4
37 VOUT_ALF5_OUT Salida función lógica adicional ALF5
38 VOUT_ALF6_OUT Salida función lógica adicional ALF6
39 VOUT_ALF7_OUT Salida función lógica adicional ALF7
40 VOUT_PS_EN El bit de estado indica si el controlador de motor puede conectar
el paso de salida
41 VOUT_WARN Se ha producido al menos un error con la prioridad “Advertencia”
42 VOUT_SCV Se ha vulnerado como mínimo una condición de seguridad
43 VOUT_ERROR El módulo de seguridad ha determinado un error interno
44 VOUT_SSR Bit global “Safety State reached” (estado seguro alcanzado), todas
las funciones de seguridad solicitadas indican estado seguro
45 VOUT_SFR Bit global “Safety Function Requested” (Función de seguridad
solicitada) en el módulo de seguridad se solicita al menos una
función de seguridad. El bit permanece activo hasta que se han
restablecido todas las solicitudes.
46 VOUT_SERVICE Estado “Service”, no hay parámetros disponibles, parámetro no
válido o sesión de parametrización en proceso
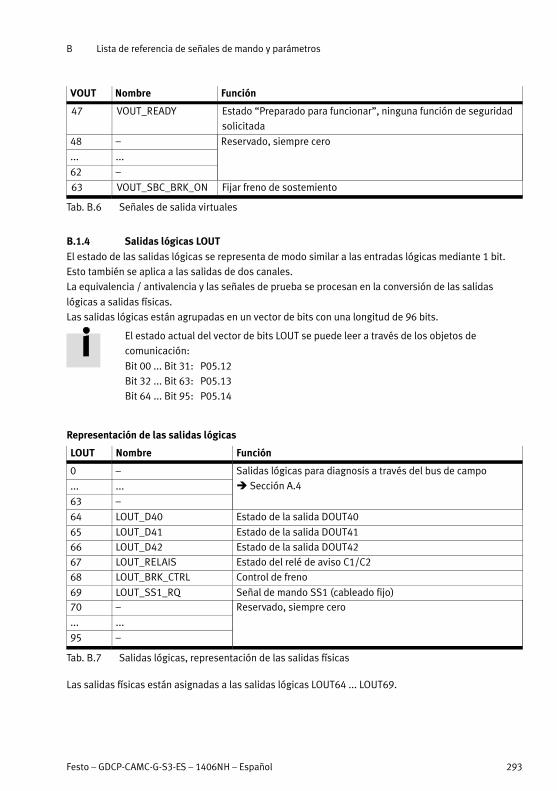
B Lista de referencia de señales de mando y parámetros
Festo – GDCP-CAMC-G-S3-ES – 1406NH – Español 293
VOUT FunciónNombre
47 VOUT_READY Estado “Preparado para funcionar”, ninguna función de seguridad
solicitada
48 – Reservado, siempre cero
... ...
62 –
63 VOUT_SBC_BRK_ON Fijar freno de sostemiento
Tab. B.6 Señales de salida virtuales
B.1.4 Salidas lógicas LOUT
El estado de las salidas lógicas se representa de modo similar a las entradas lógicas mediante 1 bit.
Esto también se aplica a las salidas de dos canales.
La equivalencia / antivalencia y las señales de prueba se procesan en la conversión de las salidas
lógicas a salidas físicas.
Las salidas lógicas están agrupadas en un vector de bits con una longitud de 96 bits.
El estado actual del vector de bits LOUT se puede leer a través de los objetos de
comunicación:
Bit 00 ... Bit 31: P05.12
Bit 32 ... Bit 63: P05.13
Bit 64 ... Bit 95: P05.14
Representación de las salidas lógicas
LOUT Nombre Función
0 – Salidas lógicas para diagnosis a través del bus de campo
� Sección A.4... ...
63 –
64 LOUT_D40 Estado de la salida DOUT40
65 LOUT_D41 Estado de la salida DOUT41
66 LOUT_D42 Estado de la salida DOUT42
67 LOUT_RELAIS Estado del relé de aviso C1/C2
68 LOUT_BRK_CTRL Control de freno
69 LOUT_SS1_RQ Señal de mando SS1 (cableado fijo)70 – Reservado, siempre cero
... ...
95 –
Tab. B.7 Salidas lógicas, representación de las salidas físicas
Las salidas físicas están asignadas a las salidas lógicas LOUT64 ... LOUT69.
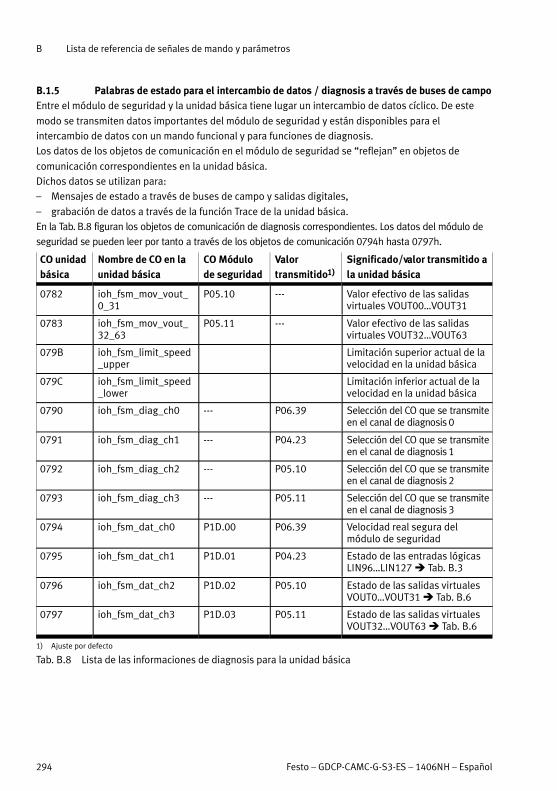
B Lista de referencia de señales de mando y parámetros
294 Festo – GDCP-CAMC-G-S3-ES – 1406NH – Español
B.1.5 Palabras de estado para el intercambio de datos / diagnosis a través de buses de campoEntre el módulo de seguridad y la unidad básica tiene lugar un intercambio de datos cíclico. De este
modo se transmiten datos importantes del módulo de seguridad y están disponibles para el
intercambio de datos con un mando funcional y para funciones de diagnosis.
Los datos de los objetos de comunicación en el módulo de seguridad se “reflejan” en objetos de
comunicación correspondientes en la unidad básica.
Dichos datos se utilizan para:
– Mensajes de estado a través de buses de campo y salidas digitales,
– grabación de datos a través de la función Trace de la unidad básica.
En la Tab. B.8 figuran los objetos de comunicación de diagnosis correspondientes. Los datos del módulo de
seguridad se pueden leer por tanto a través de los objetos de comunicación 0794h hasta 0797h.
CO unidadbásica
Nombre de CO en launidad básica
CO Módulode seguridad
Valortransmitido1)
Significado/valor transmitido ala unidad básica
0782 ioh_fsm_mov_vout_0_31
P05.10 --- Valor efectivo de las salidasvirtuales VOUT00…VOUT31
0783 ioh_fsm_mov_vout_32_63
P05.11 --- Valor efectivo de las salidasvirtuales VOUT32…VOUT63
079B ioh_fsm_limit_speed_upper
Limitación superior actual de lavelocidad en la unidad básica
079C ioh_fsm_limit_speed_lower
Limitación inferior actual de lavelocidad en la unidad básica
0790 ioh_fsm_diag_ch0 --- P06.39 Selección del CO que se transmiteen el canal de diagnosis 0
0791 ioh_fsm_diag_ch1 --- P04.23 Selección del CO que se transmiteen el canal de diagnosis 1
0792 ioh_fsm_diag_ch2 --- P05.10 Selección del CO que se transmiteen el canal de diagnosis 2
0793 ioh_fsm_diag_ch3 --- P05.11 Selección del CO que se transmiteen el canal de diagnosis 3
0794 ioh_fsm_dat_ch0 P1D.00 P06.39 Velocidad real segura delmódulo de seguridad
0795 ioh_fsm_dat_ch1 P1D.01 P04.23 Estado de las entradas lógicas LIN96…LIN127 � Tab. B.3
0796 ioh_fsm_dat_ch2 P1D.02 P05.10 Estado de las salidas virtualesVOUT0…VOUT31 � Tab. B.6
0797 ioh_fsm_dat_ch3 P1D.03 P05.11 Estado de las salidas virtualesVOUT32…VOUT63 � Tab. B.6
1) Ajuste por defecto
Tab. B.8 Lista de las informaciones de diagnosis para la unidad básica
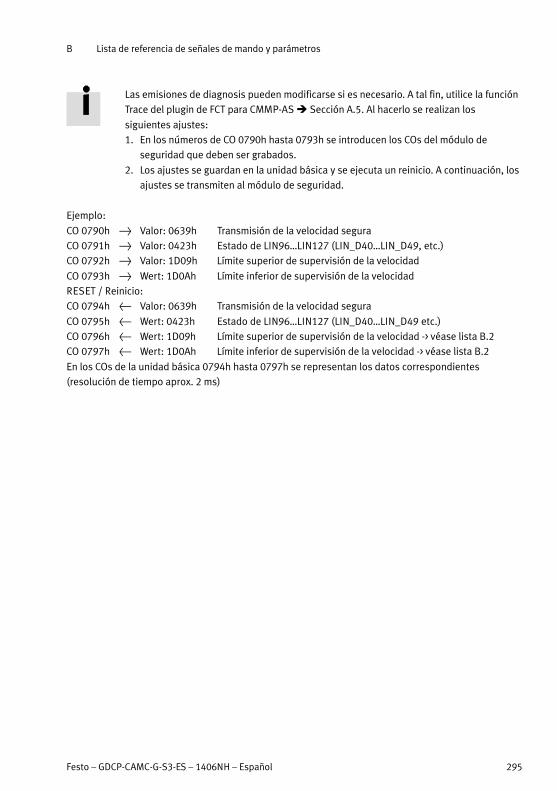
B Lista de referencia de señales de mando y parámetros
Festo – GDCP-CAMC-G-S3-ES – 1406NH – Español 295
Las emisiones de diagnosis pueden modificarse si es necesario. A tal fin, utilice la función
Trace del plugin de FCT para CMMP-AS � Sección A.5. Al hacerlo se realizan los
siguientes ajustes:
1. En los números de CO 0790h hasta 0793h se introducen los COs del módulo de
seguridad que deben ser grabados.
2. Los ajustes se guardan en la unidad básica y se ejecuta un reinicio. A continuación, los
ajustes se transmiten al módulo de seguridad.
Ejemplo:
CO 0790h } Valor: 0639h Transmisión de la velocidad segura
CO 0791h } Valor: 0423h Estado de LIN96…LIN127 (LIN_D40…LIN_D49, etc.)
CO 0792h } Valor: 1D09h Límite superior de supervisión de la velocidad
CO 0793h } Wert: 1D0Ah Límite inferior de supervisión de la velocidad
RESET / Reinicio:
CO 0794h { Valor: 0639h Transmisión de la velocidad segura
CO 0795h { Wert: 0423h Estado de LIN96…LIN127 (LIN_D40…LIN_D49 etc.)
CO 0796h { Wert: 1D09h Límite superior de supervisión de la velocidad -> véase lista B.2
CO 0797h { Wert: 1D0Ah Límite inferior de supervisión de la velocidad -> véase lista B.2
En los COs de la unidad básica 0794h hasta 0797h se representan los datos correspondientes
(resolución de tiempo aprox. 2 ms)
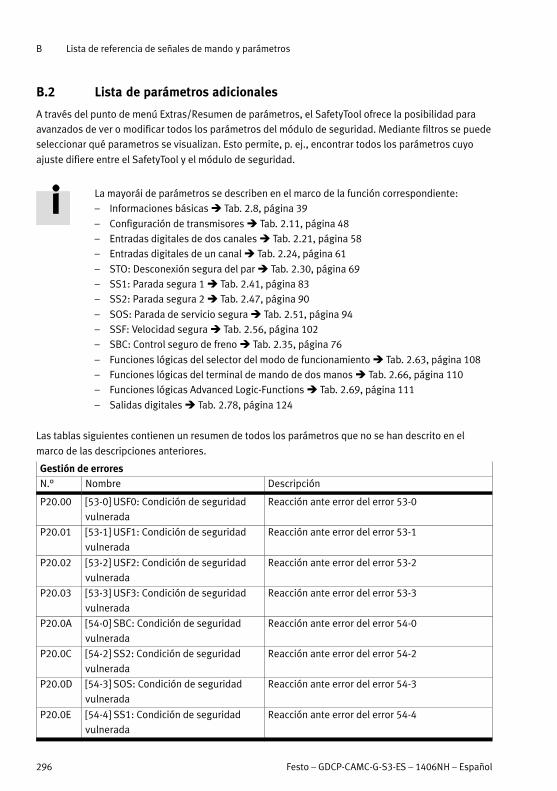
B Lista de referencia de señales de mando y parámetros
296 Festo – GDCP-CAMC-G-S3-ES – 1406NH – Español
B.2 Lista de parámetros adicionales
A través del punto de menú Extras/Resumen de parámetros, el SafetyTool ofrece la posibilidad para
avanzados de ver o modificar todos los parámetros del módulo de seguridad. Mediante filtros se puede
seleccionar qué parametros se visualizan. Esto permite, p. ej., encontrar todos los parámetros cuyo
ajuste difiere entre el SafetyTool y el módulo de seguridad.
La mayorái de parámetros se describen en el marco de la función correspondiente:
– Informaciones básicas � Tab. 2.8, página 39
– Configuración de transmisores � Tab. 2.11, página 48
– Entradas digitales de dos canales � Tab. 2.21, página 58
– Entradas digitales de un canal � Tab. 2.24, página 61
– STO: Desconexión segura del par � Tab. 2.30, página 69
– SS1: Parada segura 1 � Tab. 2.41, página 83
– SS2: Parada segura 2 � Tab. 2.47, página 90
– SOS: Parada de servicio segura � Tab. 2.51, página 94
– SSF: Velocidad segura � Tab. 2.56, página 102
– SBC: Control seguro de freno � Tab. 2.35, página 76
– Funciones lógicas del selector del modo de funcionamiento � Tab. 2.63, página 108
– Funciones lógicas del terminal de mando de dos manos � Tab. 2.66, página 110
– Funciones lógicas Advanced Logic-Functions � Tab. 2.69, página 111
– Salidas digitales � Tab. 2.78, página 124
Las tablas siguientes contienen un resumen de todos los parámetros que no se han descrito en el
marco de las descripciones anteriores.
Gestión de erroresN.° Nombre Descripción
P20.00 [53-0] USF0: Condición de seguridad
vulnerada
Reacción ante error del error 53-0
P20.01 [53-1] USF1: Condición de seguridad
vulnerada
Reacción ante error del error 53-1
P20.02 [53-2] USF2: Condición de seguridad
vulnerada
Reacción ante error del error 53-2
P20.03 [53-3] USF3: Condición de seguridad
vulnerada
Reacción ante error del error 53-3
P20.0A [54-0] SBC: Condición de seguridad
vulnerada
Reacción ante error del error 54-0
P20.0C [54-2] SS2: Condición de seguridad
vulnerada
Reacción ante error del error 54-2
P20.0D [54-3] SOS: Condición de seguridad
vulnerada
Reacción ante error del error 54-3
P20.0E [54-4] SS1: Condición de seguridad
vulnerada
Reacción ante error del error 54-4
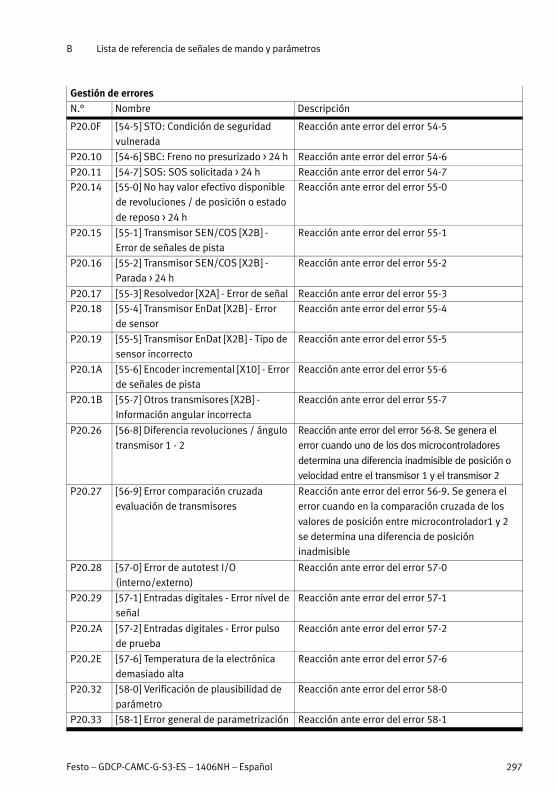
B Lista de referencia de señales de mando y parámetros
Festo – GDCP-CAMC-G-S3-ES – 1406NH – Español 297
Gestión de errores
N.° DescripciónNombre
P20.0F [54-5] STO: Condición de seguridad
vulnerada
Reacción ante error del error 54-5
P20.10 [54-6] SBC: Freno no presurizado > 24 h Reacción ante error del error 54-6
P20.11 [54-7] SOS: SOS solicitada > 24 h Reacción ante error del error 54-7
P20.14 [55-0] No hay valor efectivo disponible
de revoluciones / de posición o estado
de reposo > 24 h
Reacción ante error del error 55-0
P20.15 [55-1] Transmisor SEN/COS [X2B] -
Error de señales de pista
Reacción ante error del error 55-1
P20.16 [55-2] Transmisor SEN/COS [X2B] -
Parada > 24 h
Reacción ante error del error 55-2
P20.17 [55-3] Resolvedor [X2A] - Error de señal Reacción ante error del error 55-3
P20.18 [55-4] Transmisor EnDat [X2B] - Error
de sensor
Reacción ante error del error 55-4
P20.19 [55-5] Transmisor EnDat [X2B] - Tipo de
sensor incorrecto
Reacción ante error del error 55-5
P20.1A [55-6] Encoder incremental [X10] - Error
de señales de pista
Reacción ante error del error 55-6
P20.1B [55-7] Otros transmisores [X2B] -
Información angular incorrecta
Reacción ante error del error 55-7
P20.26 [56-8] Diferencia revoluciones / ángulo
transmisor 1 - 2
Reacción ante error del error 56-8. Se genera el
error cuando uno de los dos microcontroladores
determina una diferencia inadmisible de posición o
velocidad entre el transmisor 1 y el transmisor 2
P20.27 [56-9] Error comparación cruzada
evaluación de transmisores
Reacción ante error del error 56-9. Se genera el
error cuando en la comparación cruzada de los
valores de posición entre microcontrolador1 y 2
se determina una diferencia de posición
inadmisible
P20.28 [57-0] Error de autotest I/O
(interno/externo)
Reacción ante error del error 57-0
P20.29 [57-1] Entradas digitales - Error nivel de
señal
Reacción ante error del error 57-1
P20.2A [57-2] Entradas digitales - Error pulso
de prueba
Reacción ante error del error 57-2
P20.2E [57-6] Temperatura de la electrónica
demasiado alta
Reacción ante error del error 57-6
P20.32 [58-0] Verificación de plausibilidad de
parámetro
Reacción ante error del error 58-0
P20.33 [58-1] Error general de parametrización Reacción ante error del error 58-1
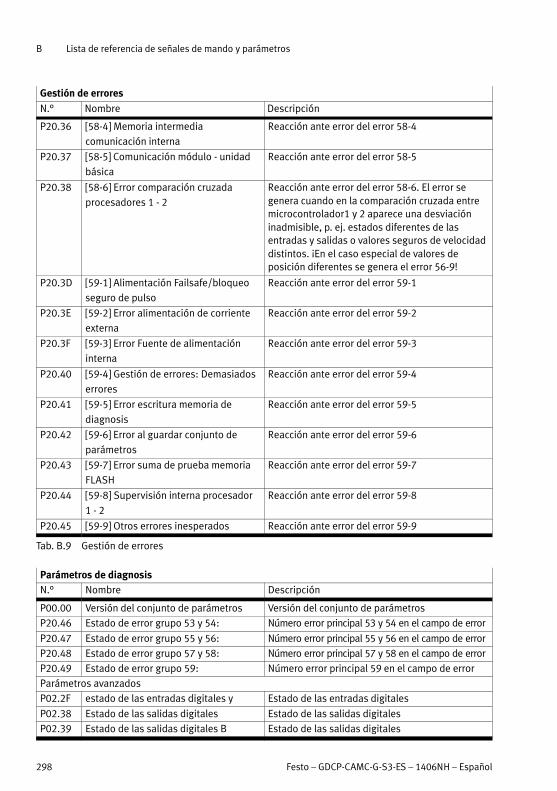
B Lista de referencia de señales de mando y parámetros
298 Festo – GDCP-CAMC-G-S3-ES – 1406NH – Español
Gestión de errores
N.° DescripciónNombre
P20.36 [58-4] Memoria intermedia
comunicación interna
Reacción ante error del error 58-4
P20.37 [58-5] Comunicación módulo - unidad
básica
Reacción ante error del error 58-5
P20.38 [58-6] Error comparación cruzada
procesadores 1 - 2
Reacción ante error del error 58-6. El error segenera cuando en la comparación cruzada entremicrocontrolador1 y 2 aparece una desviacióninadmisible, p. ej. estados diferentes de lasentradas y salidas o valores seguros de velocidaddistintos. ¡En el caso especial de valores deposición diferentes se genera el error 56-9!
P20.3D [59-1] Alimentación Failsafe/bloqueo
seguro de pulso
Reacción ante error del error 59-1
P20.3E [59-2] Error alimentación de corriente
externa
Reacción ante error del error 59-2
P20.3F [59-3] Error Fuente de alimentación
interna
Reacción ante error del error 59-3
P20.40 [59-4] Gestión de errores: Demasiados
errores
Reacción ante error del error 59-4
P20.41 [59-5] Error escritura memoria de
diagnosis
Reacción ante error del error 59-5
P20.42 [59-6] Error al guardar conjunto de
parámetros
Reacción ante error del error 59-6
P20.43 [59-7] Error suma de prueba memoria
FLASH
Reacción ante error del error 59-7
P20.44 [59-8] Supervisión interna procesador
1 - 2
Reacción ante error del error 59-8
P20.45 [59-9] Otros errores inesperados Reacción ante error del error 59-9
Tab. B.9 Gestión de errores
Parámetros de diagnosisN.° Nombre Descripción
P00.00 Versión del conjunto de parámetros Versión del conjunto de parámetros
P20.46 Estado de error grupo 53 y 54: Número error principal 53 y 54 en el campo de error
P20.47 Estado de error grupo 55 y 56: Número error principal 55 y 56 en el campo de error
P20.48 Estado de error grupo 57 y 58: Número error principal 57 y 58 en el campo de error
P20.49 Estado de error grupo 59: Número error principal 59 en el campo de error
Parámetros avanzados
P02.2F estado de las entradas digitales y Estado de las entradas digitales
P02.38 Estado de las salidas digitales Estado de las salidas digitales
P02.39 Estado de las salidas digitales B Estado de las salidas digitales
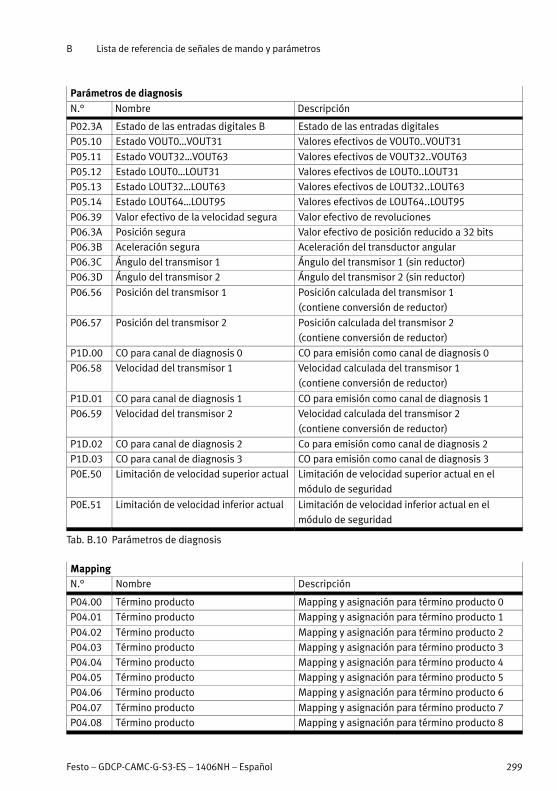
B Lista de referencia de señales de mando y parámetros
Festo – GDCP-CAMC-G-S3-ES – 1406NH – Español 299
Parámetros de diagnosis
N.° DescripciónNombre
P02.3A Estado de las entradas digitales B Estado de las entradas digitales
P05.10 Estado VOUT0�VOUT31 Valores efectivos de VOUT0..VOUT31
P05.11 Estado VOUT32�VOUT63 Valores efectivos de VOUT32..VOUT63
P05.12 Estado LOUT0�LOUT31 Valores efectivos de LOUT0..LOUT31
P05.13 Estado LOUT32�LOUT63 Valores efectivos de LOUT32..LOUT63
P05.14 Estado LOUT64�LOUT95 Valores efectivos de LOUT64..LOUT95
P06.39 Valor efectivo de la velocidad segura Valor efectivo de revoluciones
P06.3A Posición segura Valor efectivo de posición reducido a 32 bits
P06.3B Aceleración segura Aceleración del transductor angular
P06.3C Ángulo del transmisor 1 Ángulo del transmisor 1 (sin reductor)
P06.3D Ángulo del transmisor 2 Ángulo del transmisor 2 (sin reductor)
P06.56 Posición del transmisor 1 Posición calculada del transmisor 1
(contiene conversión de reductor)
P06.57 Posición del transmisor 2 Posición calculada del transmisor 2
(contiene conversión de reductor)
P1D.00 CO para canal de diagnosis 0 CO para emisión como canal de diagnosis 0
P06.58 Velocidad del transmisor 1 Velocidad calculada del transmisor 1
(contiene conversión de reductor)
P1D.01 CO para canal de diagnosis 1 CO para emisión como canal de diagnosis 1
P06.59 Velocidad del transmisor 2 Velocidad calculada del transmisor 2
(contiene conversión de reductor)
P1D.02 CO para canal de diagnosis 2 Co para emisión como canal de diagnosis 2
P1D.03 CO para canal de diagnosis 3 CO para emisión como canal de diagnosis 3
P0E.50 Limitación de velocidad superior actual Limitación de velocidad superior actual en el
módulo de seguridad
P0E.51 Limitación de velocidad inferior actual Limitación de velocidad inferior actual en el
módulo de seguridad
Tab. B.10 Parámetros de diagnosis
MappingN.° Nombre Descripción
P04.00 Término producto Mapping y asignación para término producto 0
P04.01 Término producto Mapping y asignación para término producto 1
P04.02 Término producto Mapping y asignación para término producto 2
P04.03 Término producto Mapping y asignación para término producto 3
P04.04 Término producto Mapping y asignación para término producto 4
P04.05 Término producto Mapping y asignación para término producto 5
P04.06 Término producto Mapping y asignación para término producto 6
P04.07 Término producto Mapping y asignación para término producto 7
P04.08 Término producto Mapping y asignación para término producto 8
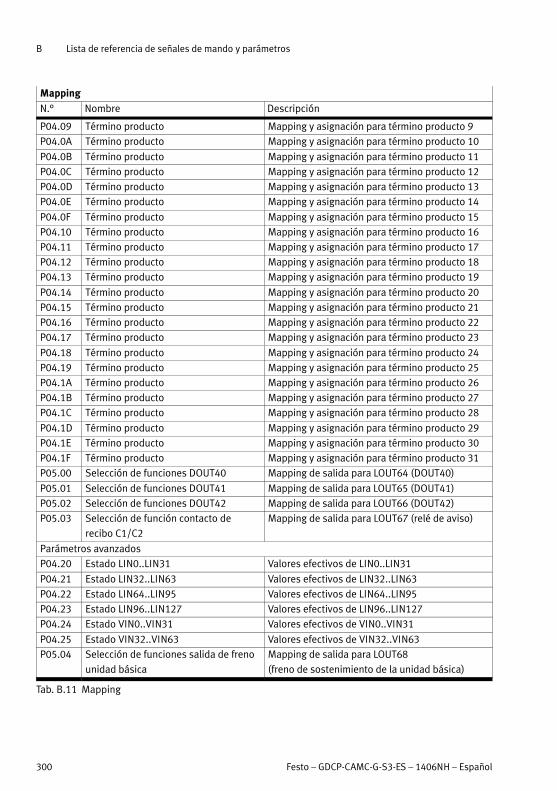
B Lista de referencia de señales de mando y parámetros
300 Festo – GDCP-CAMC-G-S3-ES – 1406NH – Español
Mapping
N.° DescripciónNombre
P04.09 Término producto Mapping y asignación para término producto 9
P04.0A Término producto Mapping y asignación para término producto 10
P04.0B Término producto Mapping y asignación para término producto 11
P04.0C Término producto Mapping y asignación para término producto 12
P04.0D Término producto Mapping y asignación para término producto 13
P04.0E Término producto Mapping y asignación para término producto 14
P04.0F Término producto Mapping y asignación para término producto 15
P04.10 Término producto Mapping y asignación para término producto 16
P04.11 Término producto Mapping y asignación para término producto 17
P04.12 Término producto Mapping y asignación para término producto 18
P04.13 Término producto Mapping y asignación para término producto 19
P04.14 Término producto Mapping y asignación para término producto 20
P04.15 Término producto Mapping y asignación para término producto 21
P04.16 Término producto Mapping y asignación para término producto 22
P04.17 Término producto Mapping y asignación para término producto 23
P04.18 Término producto Mapping y asignación para término producto 24
P04.19 Término producto Mapping y asignación para término producto 25
P04.1A Término producto Mapping y asignación para término producto 26
P04.1B Término producto Mapping y asignación para término producto 27
P04.1C Término producto Mapping y asignación para término producto 28
P04.1D Término producto Mapping y asignación para término producto 29
P04.1E Término producto Mapping y asignación para término producto 30
P04.1F Término producto Mapping y asignación para término producto 31
P05.00 Selección de funciones DOUT40 Mapping de salida para LOUT64 (DOUT40)
P05.01 Selección de funciones DOUT41 Mapping de salida para LOUT65 (DOUT41)
P05.02 Selección de funciones DOUT42 Mapping de salida para LOUT66 (DOUT42)
P05.03 Selección de función contacto de
recibo C1/C2
Mapping de salida para LOUT67 (relé de aviso)
Parámetros avanzados
P04.20 Estado LIN0..LIN31 Valores efectivos de LIN0..LIN31
P04.21 Estado LIN32..LIN63 Valores efectivos de LIN32..LIN63
P04.22 Estado LIN64..LIN95 Valores efectivos de LIN64..LIN95
P04.23 Estado LIN96..LIN127 Valores efectivos de LIN96..LIN127
P04.24 Estado VIN0..VIN31 Valores efectivos de VIN0..VIN31
P04.25 Estado VIN32..VIN63 Valores efectivos de VIN32..VIN63
P05.04 Selección de funciones salida de freno
unidad básica
Mapping de salida para LOUT68
(freno de sostenimiento de la unidad básica)
Tab. B.11 Mapping
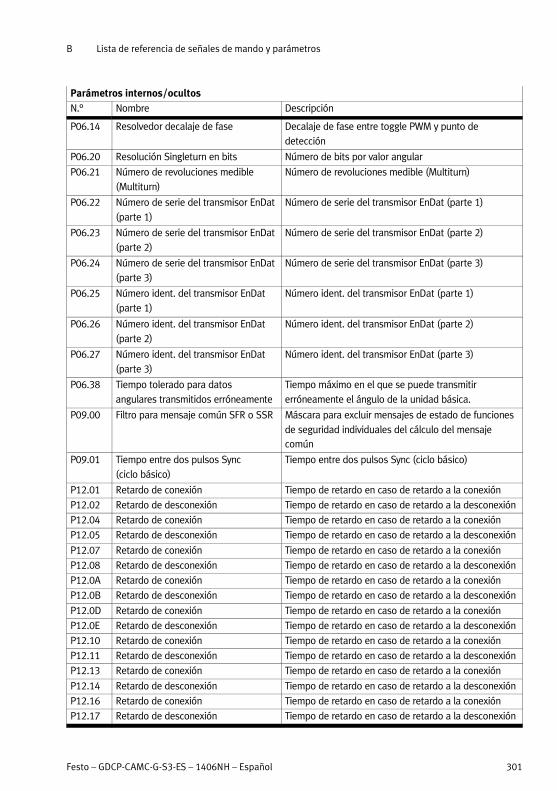
B Lista de referencia de señales de mando y parámetros
Festo – GDCP-CAMC-G-S3-ES – 1406NH – Español 301
Parámetros internos/ocultosN.° Nombre Descripción
P06.14 Resolvedor decalaje de fase Decalaje de fase entre toggle PWM y punto dedetección
P06.20 Resolución Singleturn en bits Número de bits por valor angular
P06.21 Número de revoluciones medible(Multiturn)
Número de revoluciones medible (Multiturn)
P06.22 Número de serie del transmisor EnDat(parte 1)
Número de serie del transmisor EnDat (parte 1)
P06.23 Número de serie del transmisor EnDat(parte 2)
Número de serie del transmisor EnDat (parte 2)
P06.24 Número de serie del transmisor EnDat(parte 3)
Número de serie del transmisor EnDat (parte 3)
P06.25 Número ident. del transmisor EnDat(parte 1)
Número ident. del transmisor EnDat (parte 1)
P06.26 Número ident. del transmisor EnDat(parte 2)
Número ident. del transmisor EnDat (parte 2)
P06.27 Número ident. del transmisor EnDat(parte 3)
Número ident. del transmisor EnDat (parte 3)
P06.38 Tiempo tolerado para datosangulares transmitidos erróneamente
Tiempo máximo en el que se puede transmitirerróneamente el ángulo de la unidad básica.
P09.00 Filtro para mensaje común SFR o SSR Máscara para excluir mensajes de estado de funcionesde seguridad individuales del cálculo del mensajecomún
P09.01 Tiempo entre dos pulsos Sync (ciclo básico)
Tiempo entre dos pulsos Sync (ciclo básico)
P12.01 Retardo de conexión Tiempo de retardo en caso de retardo a la conexión
P12.02 Retardo de desconexión Tiempo de retardo en caso de retardo a la desconexión
P12.04 Retardo de conexión Tiempo de retardo en caso de retardo a la conexión
P12.05 Retardo de desconexión Tiempo de retardo en caso de retardo a la desconexión
P12.07 Retardo de conexión Tiempo de retardo en caso de retardo a la conexión
P12.08 Retardo de desconexión Tiempo de retardo en caso de retardo a la desconexión
P12.0A Retardo de conexión Tiempo de retardo en caso de retardo a la conexión
P12.0B Retardo de desconexión Tiempo de retardo en caso de retardo a la desconexión
P12.0D Retardo de conexión Tiempo de retardo en caso de retardo a la conexión
P12.0E Retardo de desconexión Tiempo de retardo en caso de retardo a la desconexión
P12.10 Retardo de conexión Tiempo de retardo en caso de retardo a la conexión
P12.11 Retardo de desconexión Tiempo de retardo en caso de retardo a la desconexión
P12.13 Retardo de conexión Tiempo de retardo en caso de retardo a la conexión
P12.14 Retardo de desconexión Tiempo de retardo en caso de retardo a la desconexión
P12.16 Retardo de conexión Tiempo de retardo en caso de retardo a la conexión
P12.17 Retardo de desconexión Tiempo de retardo en caso de retardo a la desconexión
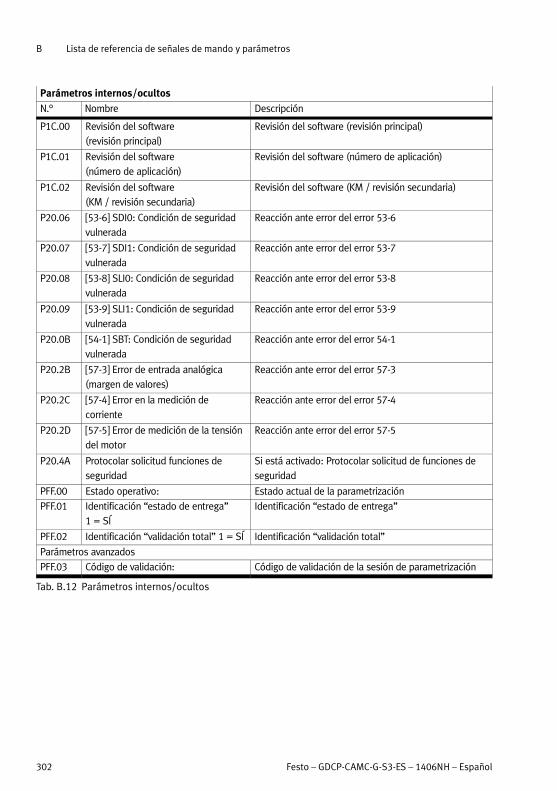
B Lista de referencia de señales de mando y parámetros
302 Festo – GDCP-CAMC-G-S3-ES – 1406NH – Español
Parámetros internos/ocultos
N.° DescripciónNombre
P1C.00 Revisión del software (revisión principal)
Revisión del software (revisión principal)
P1C.01 Revisión del software (número de aplicación)
Revisión del software (número de aplicación)
P1C.02 Revisión del software (KM / revisión secundaria)
Revisión del software (KM / revisión secundaria)
P20.06 [53-6] SDI0: Condición de seguridadvulnerada
Reacción ante error del error 53-6
P20.07 [53-7] SDI1: Condición de seguridadvulnerada
Reacción ante error del error 53-7
P20.08 [53-8] SLI0: Condición de seguridadvulnerada
Reacción ante error del error 53-8
P20.09 [53-9] SLI1: Condición de seguridadvulnerada
Reacción ante error del error 53-9
P20.0B [54-1] SBT: Condición de seguridadvulnerada
Reacción ante error del error 54-1
P20.2B [57-3] Error de entrada analógica(margen de valores)
Reacción ante error del error 57-3
P20.2C [57-4] Error en la medición decorriente
Reacción ante error del error 57-4
P20.2D [57-5] Error de medición de la tensióndel motor
Reacción ante error del error 57-5
P20.4A Protocolar solicitud funciones deseguridad
Si está activado: Protocolar solicitud de funciones deseguridad
PFF.00 Estado operativo: Estado actual de la parametrización
PFF.01 Identificación “estado de entrega” 1 = SÍ
Identificación “estado de entrega”
PFF.02 Identificación “validación total” 1 = SÍ Identificación “validación total”
Parámetros avanzados
PFF.03 Código de validación: Código de validación de la sesión de parametrización
Tab. B.12 Parámetros internos/ocultos
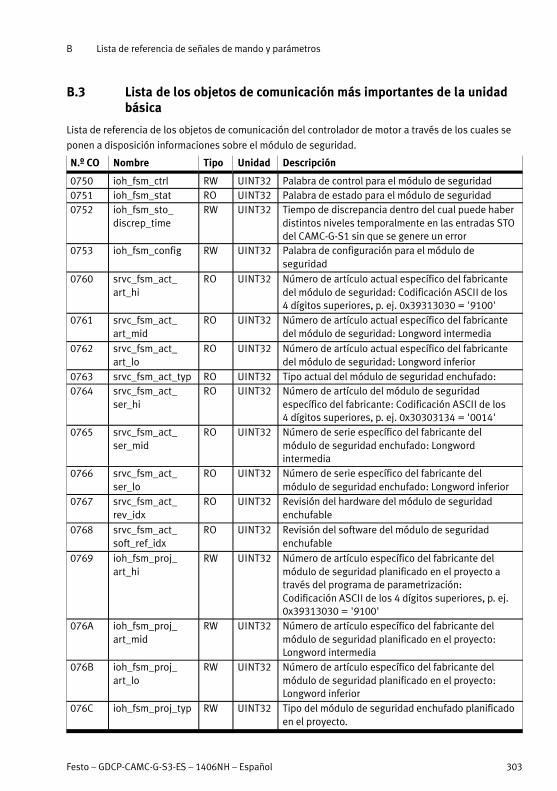
B Lista de referencia de señales de mando y parámetros
Festo – GDCP-CAMC-G-S3-ES – 1406NH – Español 303
B.3 Lista de los objetos de comunicación más importantes de la unidadbásica
Lista de referencia de los objetos de comunicación del controlador de motor a través de los cuales se
ponen a disposición informaciones sobre el módulo de seguridad.
N.º CO Nombre Tipo Unidad Descripción
0750 ioh_fsm_ctrl RW UINT32 Palabra de control para el módulo de seguridad0751 ioh_fsm_stat RO UINT32 Palabra de estado para el módulo de seguridad0752 ioh_fsm_sto_
discrep_timeRW UINT32 Tiempo de discrepancia dentro del cual puede haber
distintos niveles temporalmente en las entradas STOdel CAMC-G-S1 sin que se genere un error
0753 ioh_fsm_config RW UINT32 Palabra de configuración para el módulo deseguridad
0760 srvc_fsm_act_art_hi
RO UINT32 Número de artículo actual específico del fabricantedel módulo de seguridad: Codificación ASCII de los4 dígitos superiores, p. ej. 0x39313030 = '9100'
0761 srvc_fsm_act_art_mid
RO UINT32 Número de artículo actual específico del fabricantedel módulo de seguridad: Longword intermedia
0762 srvc_fsm_act_art_lo
RO UINT32 Número de artículo actual específico del fabricantedel módulo de seguridad: Longword inferior
0763 srvc_fsm_act_typ RO UINT32 Tipo actual del módulo de seguridad enchufado:0764 srvc_fsm_act_
ser_hiRO UINT32 Número de artículo del módulo de seguridad
específico del fabricante: Codificación ASCII de los4 dígitos superiores, p. ej. 0x30303134 = '0014'
0765 srvc_fsm_act_ser_mid
RO UINT32 Número de serie específico del fabricante delmódulo de seguridad enchufado: Longwordintermedia
0766 srvc_fsm_act_ser_lo
RO UINT32 Número de serie específico del fabricante delmódulo de seguridad enchufado: Longword inferior
0767 srvc_fsm_act_rev_idx
RO UINT32 Revisión del hardware del módulo de seguridadenchufable
0768 srvc_fsm_act_soft_ref_idx
RO UINT32 Revisión del software del módulo de seguridadenchufable
0769 ioh_fsm_proj_art_hi
RW UINT32 Número de artículo específico del fabricante delmódulo de seguridad planificado en el proyecto através del programa de parametrización:Codificación ASCII de los 4 dígitos superiores, p. ej.0x39313030 = '9100'
076A ioh_fsm_proj_art_mid
RW UINT32 Número de artículo específico del fabricante delmódulo de seguridad planificado en el proyecto:Longword intermedia
076B ioh_fsm_proj_art_lo
RW UINT32 Número de artículo específico del fabricante delmódulo de seguridad planificado en el proyecto:Longword inferior
076C ioh_fsm_proj_typ RW UINT32 Tipo del módulo de seguridad enchufado planificadoen el proyecto.
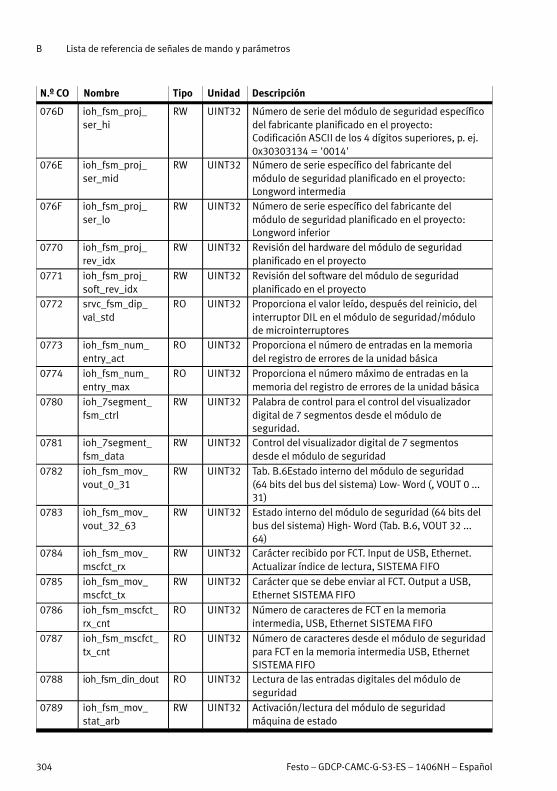
B Lista de referencia de señales de mando y parámetros
304 Festo – GDCP-CAMC-G-S3-ES – 1406NH – Español
N.º CO DescripciónUnidadTipoNombre
076D ioh_fsm_proj_ser_hi
RW UINT32 Número de serie del módulo de seguridad específicodel fabricante planificado en el proyecto:Codificación ASCII de los 4 dígitos superiores, p. ej.0x30303134 = '0014'
076E ioh_fsm_proj_ser_mid
RW UINT32 Número de serie específico del fabricante delmódulo de seguridad planificado en el proyecto:Longword intermedia
076F ioh_fsm_proj_ser_lo
RW UINT32 Número de serie específico del fabricante delmódulo de seguridad planificado en el proyecto:Longword inferior
0770 ioh_fsm_proj_rev_idx
RW UINT32 Revisión del hardware del módulo de seguridadplanificado en el proyecto
0771 ioh_fsm_proj_soft_rev_idx
RW UINT32 Revisión del software del módulo de seguridadplanificado en el proyecto
0772 srvc_fsm_dip_val_std
RO UINT32 Proporciona el valor leído, después del reinicio, delinterruptor DIL en el módulo de seguridad/módulode microinterruptores
0773 ioh_fsm_num_entry_act
RO UINT32 Proporciona el número de entradas en la memoriadel registro de errores de la unidad básica
0774 ioh_fsm_num_entry_max
RO UINT32 Proporciona el número máximo de entradas en lamemoria del registro de errores de la unidad básica
0780 ioh_7segment_fsm_ctrl
RW UINT32 Palabra de control para el control del visualizadordigital de 7 segmentos desde el módulo deseguridad.
0781 ioh_7segment_fsm_data
RW UINT32 Control del visualizador digital de 7 segmentosdesde el módulo de seguridad
0782 ioh_fsm_mov_vout_0_31
RW UINT32 Tab. B.6Estado interno del módulo de seguridad(64 bits del bus del sistema) Low- Word (, VOUT 0 ...31)
0783 ioh_fsm_mov_vout_32_63
RW UINT32 Estado interno del módulo de seguridad (64 bits delbus del sistema) High- Word (Tab. B.6, VOUT 32 ...64)
0784 ioh_fsm_mov_mscfct_rx
RW UINT32 Carácter recibido por FCT. Input de USB, Ethernet.Actualizar índice de lectura, SISTEMA FIFO
0785 ioh_fsm_mov_mscfct_tx
RW UINT32 Carácter que se debe enviar al FCT. Output a USB,Ethernet SISTEMA FIFO
0786 ioh_fsm_mscfct_rx_cnt
RO UINT32 Número de caracteres de FCT en la memoriaintermedia, USB, Ethernet SISTEMA FIFO
0787 ioh_fsm_mscfct_tx_cnt
RO UINT32 Número de caracteres desde el módulo de seguridadpara FCT en la memoria intermedia USB, EthernetSISTEMA FIFO
0788 ioh_fsm_din_dout RO UINT32 Lectura de las entradas digitales del módulo deseguridad
0789 ioh_fsm_mov_stat_arb
RW UINT32 Activación/lectura del módulo de seguridadmáquina de estado
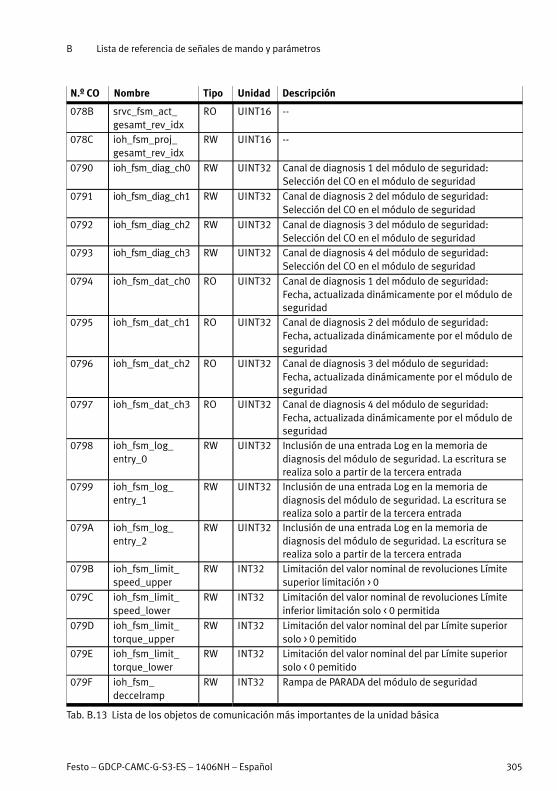
B Lista de referencia de señales de mando y parámetros
Festo – GDCP-CAMC-G-S3-ES – 1406NH – Español 305
N.º CO DescripciónUnidadTipoNombre
078B srvc_fsm_act_gesamt_rev_idx
RO UINT16 --
078C ioh_fsm_proj_gesamt_rev_idx
RW UINT16 --
0790 ioh_fsm_diag_ch0 RW UINT32 Canal de diagnosis 1 del módulo de seguridad:Selección del CO en el módulo de seguridad
0791 ioh_fsm_diag_ch1 RW UINT32 Canal de diagnosis 2 del módulo de seguridad:Selección del CO en el módulo de seguridad
0792 ioh_fsm_diag_ch2 RW UINT32 Canal de diagnosis 3 del módulo de seguridad:Selección del CO en el módulo de seguridad
0793 ioh_fsm_diag_ch3 RW UINT32 Canal de diagnosis 4 del módulo de seguridad:Selección del CO en el módulo de seguridad
0794 ioh_fsm_dat_ch0 RO UINT32 Canal de diagnosis 1 del módulo de seguridad:Fecha, actualizada dinámicamente por el módulo deseguridad
0795 ioh_fsm_dat_ch1 RO UINT32 Canal de diagnosis 2 del módulo de seguridad:Fecha, actualizada dinámicamente por el módulo deseguridad
0796 ioh_fsm_dat_ch2 RO UINT32 Canal de diagnosis 3 del módulo de seguridad:Fecha, actualizada dinámicamente por el módulo deseguridad
0797 ioh_fsm_dat_ch3 RO UINT32 Canal de diagnosis 4 del módulo de seguridad:Fecha, actualizada dinámicamente por el módulo deseguridad
0798 ioh_fsm_log_entry_0
RW UINT32 Inclusión de una entrada Log en la memoria dediagnosis del módulo de seguridad. La escritura serealiza solo a partir de la tercera entrada
0799 ioh_fsm_log_entry_1
RW UINT32 Inclusión de una entrada Log en la memoria dediagnosis del módulo de seguridad. La escritura serealiza solo a partir de la tercera entrada
079A ioh_fsm_log_entry_2
RW UINT32 Inclusión de una entrada Log en la memoria dediagnosis del módulo de seguridad. La escritura serealiza solo a partir de la tercera entrada
079B ioh_fsm_limit_speed_upper
RW INT32 Limitación del valor nominal de revoluciones Límitesuperior limitación > 0
079C ioh_fsm_limit_speed_lower
RW INT32 Limitación del valor nominal de revoluciones Límiteinferior limitación solo < 0 permitida
079D ioh_fsm_limit_torque_upper
RW INT32 Limitación del valor nominal del par Límite superiorsolo > 0 pemitido
079E ioh_fsm_limit_torque_lower
RW INT32 Limitación del valor nominal del par Límite superiorsolo < 0 pemitido
079F ioh_fsm_deccelramp
RW INT32 Rampa de PARADA del módulo de seguridad
Tab. B.13 Lista de los objetos de comunicación más importantes de la unidad básica
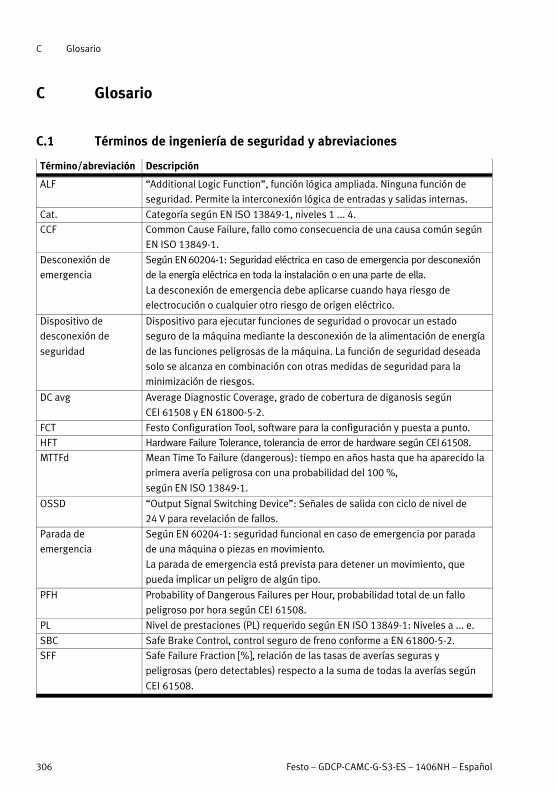
C Glosario
306 Festo – GDCP-CAMC-G-S3-ES – 1406NH – Español
C Glosario
C.1 Términos de ingeniería de seguridad y abreviaciones
Término/abreviación Descripción
ALF “Additional Logic Function”, función lógica ampliada. Ninguna función de
seguridad. Permite la interconexión lógica de entradas y salidas internas.
Cat. Categoría según EN ISO 13849-1, niveles 1 ... 4.
CCF Common Cause Failure, fallo como consecuencia de una causa común según
EN ISO 13849-1.
Desconexión de
emergencia
Según EN 60204-1: Seguridad eléctrica en caso de emergencia por desconexión
de la energía eléctrica en toda la instalación o en una parte de ella.
La desconexión de emergencia debe aplicarse cuando haya riesgo de
electrocución o cualquier otro riesgo de origen eléctrico.
Dispositivo de
desconexión de
seguridad
Dispositivo para ejecutar funciones de seguridad o provocar un estado
seguro de la máquina mediante la desconexión de la alimentación de energía
de las funciones peligrosas de la máquina. La función de seguridad deseada
solo se alcanza en combinación con otras medidas de seguridad para la
minimización de riesgos.
DC avg Average Diagnostic Coverage, grado de cobertura de diganosis según
CEI 61508 y EN 61800-5-2.
FCT Festo Configuration Tool, software para la configuración y puesta a punto.
HFT Hardware Failure Tolerance, tolerancia de error de hardware según CEI 61508.
MTTFd Mean Time To Failure (dangerous): tiempo en años hasta que ha aparecido la
primera avería peligrosa con una probabilidad del 100 %,
según EN ISO 13849-1.
OSSD “Output Signal Switching Device”: Señales de salida con ciclo de nivel de
24 V para revelación de fallos.
Parada de
emergencia
Según EN 60204-1: seguridad funcional en caso de emergencia por parada
de una máquina o piezas en movimiento.
La parada de emergencia está prevista para detener un movimiento, que
pueda implicar un peligro de algún tipo.
PFH Probability of Dangerous Failures per Hour, probabilidad total de un fallo
peligroso por hora según CEI 61508.
PL Nivel de prestaciones (PL) requerido según EN ISO 13849-1: Niveles a ... e.
SBC Safe Brake Control, control seguro de freno conforme a EN 61800-5-2.
SFF Safe Failure Fraction [%], relación de las tasas de averías seguras y
peligrosas (pero detectables) respecto a la suma de todas la averías según
CEI 61508.
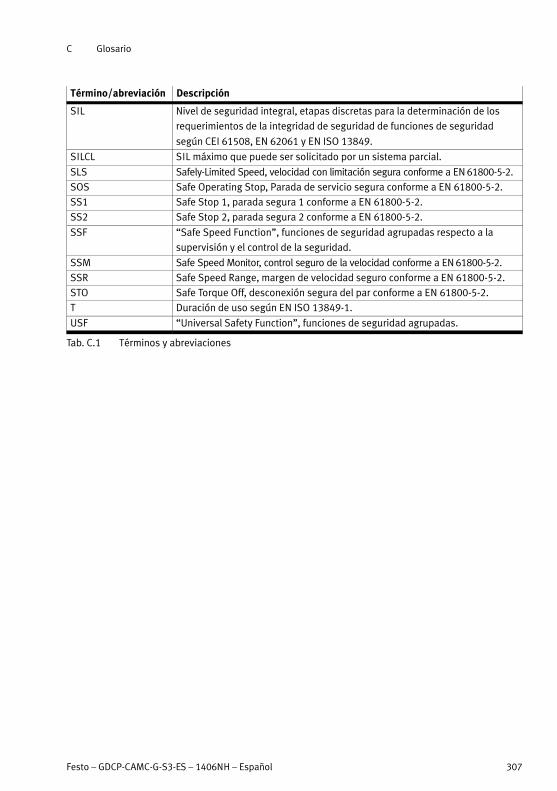
C Glosario
Festo – GDCP-CAMC-G-S3-ES – 1406NH – Español 307
Término/abreviación Descripción
SIL Nivel de seguridad integral, etapas discretas para la determinación de los
requerimientos de la integridad de seguridad de funciones de seguridad
según CEI 61508, EN 62061 y EN ISO 13849.
SILCL SIL máximo que puede ser solicitado por un sistema parcial.
SLS Safely-Limited Speed, velocidad con limitación segura conforme a EN 61800-5-2.
SOS Safe Operating Stop, Parada de servicio segura conforme a EN 61800-5-2.
SS1 Safe Stop 1, parada segura 1 conforme a EN 61800-5-2.
SS2 Safe Stop 2, parada segura 2 conforme a EN 61800-5-2.
SSF “Safe Speed Function”, funciones de seguridad agrupadas respecto a la
supervisión y el control de la seguridad.
SSM Safe Speed Monitor, control seguro de la velocidad conforme a EN 61800-5-2.
SSR Safe Speed Range, margen de velocidad seguro conforme a EN 61800-5-2.
STO Safe Torque Off, desconexión segura del par conforme a EN 61800-5-2.
T Duración de uso según EN ISO 13849-1.
USF “Universal Safety Function”, funciones de seguridad agrupadas.
Tab. C.1 Términos y abreviaciones
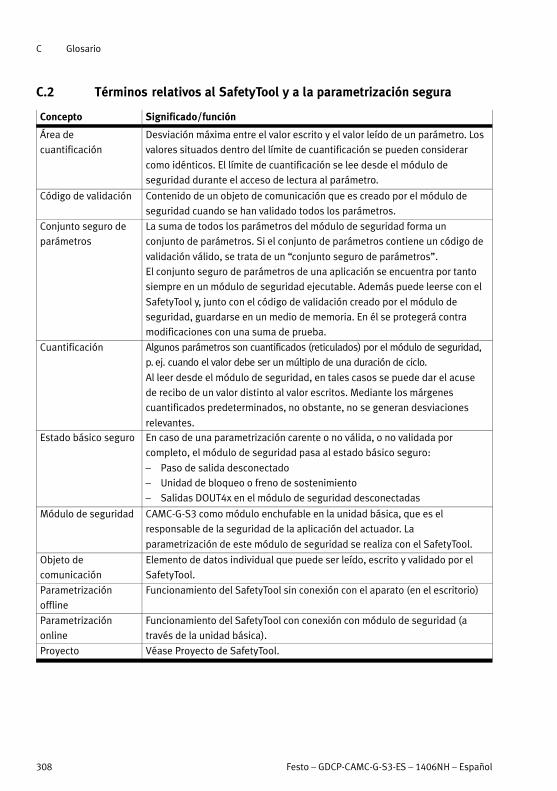
C Glosario
308 Festo – GDCP-CAMC-G-S3-ES – 1406NH – Español
C.2 Términos relativos al SafetyTool y a la parametrización segura
Concepto Significado/función
Área de
cuantificación
Desviación máxima entre el valor escrito y el valor leído de un parámetro. Los
valores situados dentro del límite de cuantificación se pueden considerar
como idénticos. El límite de cuantificación se lee desde el módulo de
seguridad durante el acceso de lectura al parámetro.
Código de validación Contenido de un objeto de comunicación que es creado por el módulo de
seguridad cuando se han validado todos los parámetros.
Conjunto seguro de
parámetros
La suma de todos los parámetros del módulo de seguridad forma un
conjunto de parámetros. Si el conjunto de parámetros contiene un código de
validación válido, se trata de un “conjunto seguro de parámetros”.
El conjunto seguro de parámetros de una aplicación se encuentra por tanto
siempre en un módulo de seguridad ejecutable. Además puede leerse con el
SafetyTool y, junto con el código de validación creado por el módulo de
seguridad, guardarse en un medio de memoria. En él se protegerá contra
modificaciones con una suma de prueba.
Cuantificación Algunos parámetros son cuantificados (reticulados) por el módulo de seguridad,
p. ej. cuando el valor debe ser un múltiplo de una duración de ciclo.
Al leer desde el módulo de seguridad, en tales casos se puede dar el acuse
de recibo de un valor distinto al valor escritos. Mediante los márgenes
cuantificados predeterminados, no obstante, no se generan desviaciones
relevantes.Estado básico seguro En caso de una parametrización carente o no válida, o no validada por
completo, el módulo de seguridad pasa al estado básico seguro:
– Paso de salida desconectado
– Unidad de bloqueo o freno de sostenimiento
– Salidas DOUT4x en el módulo de seguridad desconectadas
Módulo de seguridad CAMC-G-S3 como módulo enchufable en la unidad básica, que es el
responsable de la seguridad de la aplicación del actuador. La
parametrización de este módulo de seguridad se realiza con el SafetyTool.
Objeto de
comunicación
Elemento de datos individual que puede ser leído, escrito y validado por el
SafetyTool.
Parametrización
offline
Funcionamiento del SafetyTool sin conexión con el aparato (en el escritorio)
Parametrización
online
Funcionamiento del SafetyTool con conexión con módulo de seguridad (a
través de la unidad básica).
Proyecto Véase Proyecto de SafetyTool.
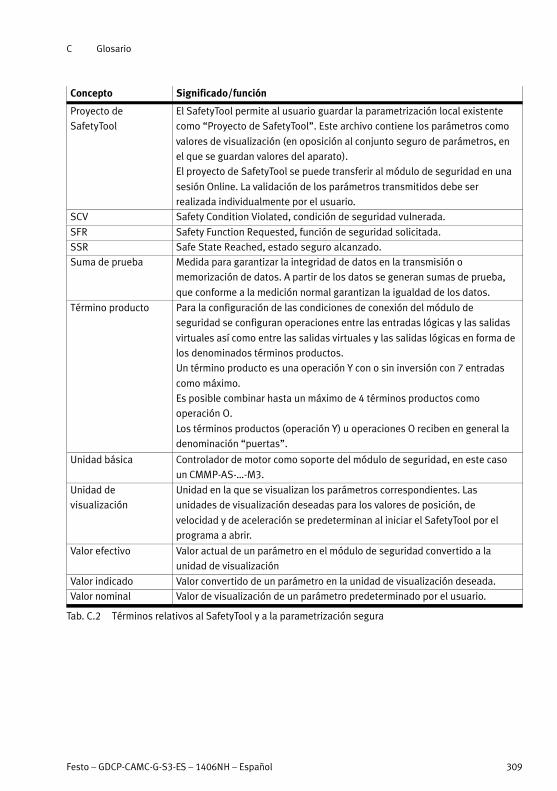
C Glosario
Festo – GDCP-CAMC-G-S3-ES – 1406NH – Español 309
Concepto Significado/función
Proyecto de
SafetyTool
El SafetyTool permite al usuario guardar la parametrización local existente
como “Proyecto de SafetyTool”. Este archivo contiene los parámetros como
valores de visualización (en oposición al conjunto seguro de parámetros, en
el que se guardan valores del aparato).
El proyecto de SafetyTool se puede transferir al módulo de seguridad en una
sesión Online. La validación de los parámetros transmitidos debe ser
realizada individualmente por el usuario.
SCV Safety Condition Violated, condición de seguridad vulnerada.
SFR Safety Function Requested, función de seguridad solicitada.
SSR Safe State Reached, estado seguro alcanzado.
Suma de prueba Medida para garantizar la integridad de datos en la transmisión o
memorización de datos. A partir de los datos se generan sumas de prueba,
que conforme a la medición normal garantizan la igualdad de los datos.
Término producto Para la configuración de las condiciones de conexión del módulo de
seguridad se configuran operaciones entre las entradas lógicas y las salidas
virtuales así como entre las salidas virtuales y las salidas lógicas en forma de
los denominados términos productos.
Un término producto es una operación Y con o sin inversión con 7 entradas
como máximo.
Es posible combinar hasta un máximo de 4 términos productos como
operación O.
Los términos productos (operación Y) u operaciones O reciben en general la
denominación “puertas”.
Unidad básica Controlador de motor como soporte del módulo de seguridad, en este caso
un CMMP-AS-…-M3.
Unidad de
visualización
Unidad en la que se visualizan los parámetros correspondientes. Las
unidades de visualización deseadas para los valores de posición, de
velocidad y de aceleración se predeterminan al iniciar el SafetyTool por el
programa a abrir.
Valor efectivo Valor actual de un parámetro en el módulo de seguridad convertido a la
unidad de visualización
Valor indicado Valor convertido de un parámetro en la unidad de visualización deseada.
Valor nominal Valor de visualización de un parámetro predeterminado por el usuario.
Tab. C.2 Términos relativos al SafetyTool y a la parametrización segura
Sin nuestra expresa autorización, queda terminantemente prohibidala reproducción total o parcial de este documento, así como su usoindebido y/o exhibición o comunicación a terceros. De los infractoresse exigirá el correspondiente resarcimiento de daños y perjuicios.Quedan reservados todos los derechos inherentes, en especial los depatentes, de modelos registrados y estéticos.
Copyright:Festo AG & Co. KGPostfach73726 EsslingenAlemania
Phone:+49 711 347-0
Fax:+49 711 347-2144
e-mail:[email protected]
Internet:www.festo.com
Original: de