y xin ma - imm.dtu.dk · ix p arts of this thesis ha v e previously b een published in xin ma. mo...
TRANSCRIPT
AdaptiveExtremum
Control
and
W
indTurbineControl
XinMa
May1997
Copyrightc 1997byXinMa

Preface
Thisthesisissubmittedinpartialful�llmentoftherequirementsforthedegree
ofPh.D.inengineering.ThethesishasbeenpreparedattheInstituteofMathe-
maticalModelling(IMM),theTechnicalUniversityofDenmark(DTU).
Thisthesisconsistsoftwoparts,i.e.,adaptiveextremum
controlandmodelling
andcontrolofawindturbine.
The�rstpartofthethesisdiscussesdesignofadaptiveextremumcontrollersfor
someprocesseswhichhavethebehaviourthattheprocessshouldhaveashigh
e�ciencyaspossible.Themaincontributionisthedevelopmentofanadaptive
extremumcontrolalgorithmbasedontheparameterestimationfortheprocesses
withoutputnonlinearity.
Thesecondpartofthethesisisconcernedwithmodellingandcontrolofawind
turbine.Theinvestigationofcontroldesignisdividedintobelowratedoperation
andaboveratedoperation.
Thebehaviourofwindturbinesinbelowratedoperationbelongstotheprocess
discussedinthe�rstpartofthethesis,whichcanbeconsideredasaconnection
betweentwoparts.
i
ii
Acknowledgements
Itispleasureformetaketheopportunitytoexpressmygratefulnessto
everybodywhoenabledmetoperformtheworkpresentedinthisthesis.
First,IwishtoexpressmythankstomysupervisorNielsKj�stadPoulsen
(IMM)andHenrikBindner(Ris�NationalLaboratory)fortheirwillingto
bemysupervisorsandtheirinterestsintheproject.Further,Ithankthem
forreadingthe�rstversionofthethesisandforgivinghelpfulcomments.
Iwouldalsoliketothankthesta�attheIMM,myfriendsAncaDaniella
Hansenforenjoyabledailycompany,andLarsHenrikHansenwhohasal-
waystimeandpatiencewithmyquestions.EspeciallyIwishtothankthe
librarianFinnKunoChristensenforhishelpto�ndliteraturesources.
Igreatlyappreciatethesupportbymyparentsandmyparents-in-law,who
havehelpedmetotakecareofmysonduringmystudy.Iwouldalsolike
tothankmysonJohanZiruoYeforhisunderstanding.
iii
iv Finally,AspecialacknowledgeistomyhusbandTaoYe,whomIcannever
thankenoughforhissupportandencouragement.
Lyngby,Denmark,May1997.
XinMa
Summary
Thisthesisisdividedintotwoparts,i.e.,adaptiveextremumcontroland
modellingandcontrolofawindturbine.
The�rstpartofthethesisdealswiththedesignofadaptiveextremum
controllersforsomeprocesseswhichhavethebehaviourthatprocessshould
haveashighe�ciencyaspossible.
Firstly,itisassumedthatthenonlinearprocessescanbedividedintoa
dynamiclinearpartandstaticnonlinearpart.Consequentlytheprocesses
withinputnonlinearityandoutputnonlinearityaretreatedseparately.
Withthenonlinearityattheinputitiseasytosetupamodelwhichis
linearinparameters,andthusdirectlylendsitselftoparameterestimation
andadaptivecontrol.Theextremumcontrollawisderivedbasedonstatic
optimizationofaperformancefunction.
Foraprocesswithnonlinearityatoutputtheintermediatesignalbetween
thelinearpartandnonlinearpartplaysanimportantrole.Ifitcanbe
v
vi
known,theonlydi�erencebetweentheoutputnonlinearityandinputnon-
linearityisthatitsextremumcontrollawwillbedeterminedthroughlinear
dynamics.Iftheintermediatesignalisnotavailable,theemphasiswill
belaidontheparameterestimationapproaches.TheEKFandRPEM
methodsaredevelopedforstateandparameterestimationforanonlinear
system.
Thesecondpartofthethesisdiscussestheaspectsonmodellingandcontrol
ofawindturbine.
Specialattentionispaidtomathematicalmodellingofwindturbineswith
emphasisoncontroldesign.Themodelshavebeenvalidatedbyexperimen-
taldataobtainedfromanexistingwindturbine.
Thee�ectivewindspeedexperiencedbytherotorofawindturbine,which
isoftenrequiredbysomecontrolmethods,isestimatedbyusingawind
turbineasawindmeasuringdevice.
Theinvestigationofcontroldesignisdividedintobelowratedoperationand
aboveratedoperation.Belowratedpower,theaimofcontrolistoextract
maximumenergyfromthewind.Thepitchangleoftherotorbladesis�xed
atitsoptimalvalueandturbinespeedisadjustedtofollowthechangesin
windspeed.Aboveratedpower,thecontroldesignproblemistolimitand
smooththeoutputelectricalpower.Thepitchcontrolisinvestigatedfor
bothconstantspeedandvariablespeedwindturbines.Theminimization
oftheturbinetransientloadsisfocussedinbothcases.

Resum�e(inDanish)
N�rv�rendeafhandlingomhandlertorelateredeemner,adaptiveekstremum-
s�geresamtmodelleringogstyringafvindm�ller.
Afhandlingensf�rstedelvedr�reradaptiveekstremums�gere.M�aleterat
introducereenstyringsstrategi,der�geretsystemse�ektivitet.
F�rstantagesdetatdenuline�reprocesbest�arafenline�rdynamiskdel
samtenuline�rstatiskdel.Processermedulineariteteriudgangenogi
indgangenharderesspeci�kkeegenskaber.
Hvisulineariteterneerrelaterettiludgangenkansystemetletbeskrivesaf
enmodeldererline�riparametreneogf�lgeligletindg�aienparameter-
estimationogadaptivregulering.Denekstremums�gendestyrestrategier
udledtudfrastatiskeoptimeringsmetoder.
Hvisulinearitetenerrelaterettilindgangenafsystemetspillerdetpartielle
signalmellemline�roguline�rdelenbestydeligrolle.Erdettesignalkendt
ellerm�altbest�ardenekstremums�gendestyrestrategiafenoptimeringvia
vii
viii
denline�redynamik.Erdettesignalikketilg�ngeligtm�aenestimations-
baseretmetodeanvendes.EnEKFogenRPEM
metodeerudvikletfor
tilstandsogparameterestimation.
Afhandlingensandendelvedr�rermodelleringogstyringafvindm�ller.
Imodelleringenerderfokuseretp�aanvendelsenafmodellentilregulator
design.Modellenerblevetvalideretmodeksperimentelledata.
Dene�ektivevindhastighederenmodelleringstekniskst�rrelse,someret
udtrykforvindensp�avirkningafvindm�llenoganvendesofteifremkoblings-
delenforenstyring.Dereriafhandlingenbeskrevetogdiskuteretmetoder
tilestimationafdene�ektivevindhastighedmedvindm�llensomegentligt
m�alesystem.
Styringafenvindm�llebest�araftoopgaver.Undernominelvindhastighed
erm�aletatoptimeredene�ektderudnyttesfravinden.Vindm�llensblad-
vinkelerfastl�astveddenoptimaleudnyttelsesgradogoml�bstalletjusteres
tilatf�lgevariationerneivindhastigheden.Overnominelvindhastighed
erm�aletatbegr�nsedenoptagnee�ekttilenpr�speci�ceretst�rrelse.
Iafhandlingenbehandlesbladvinkelreguleringmedb�adekonstantogvari-
abeltoml�bstal.
ix
Partsofthisthesishavepreviouslybeenpublishedin
�XinMa.ModellingandControlofaWindTurbine.Master'sthesis,
No.25/93,IMSOR,DTU.
�XinMa,NielsK.PoulsenandHenrikBindner.ModellingandControl
ofaWindTurbine.Technicalreport,IMM-rep-1994-27,IMM,DTU.
�XinMa,NielsK.PoulsenandHenrikBindner.EstimationofWind
SpeedinConnectiontoaWindTurbine.Technicalreport,IMM-rep-
1995-26,IMM,DTU.
�XinMa,NielsK.PoulsenandHenrikBindner.APitchRegulated
VariableSpeedWindTurbine.Technicalreport,IMM-rep-1995-27,
IMM,DTU.
�XinMaandNielsK.Poulsen.AdaptiveExtremumControl.Technical
report,IMM-rep-1996-23,IMM,DTU.
�XinMa,NielsK.PoulsenandHenrikBindner.EstimationofWind
SpeedinConnectiontoaWindTurbine.AcceptedbytheIASTED
InternationalConferenceonControl,Mexico,May,1997.
�XinMa,NielsK.PoulsenandHenrikBindner.ExtremumTracking
ControlofaWindTurbine.Technicalreport,toappear,IMM,DTU.
x
Contents
Preface
i
Acknowledgements
iii
Summary
v
Resum�e(inDanish)
vii
I
AdaptiveExtremum
Control
1
Glossary
3
1
Introduction
5
xi
xii
CONTENTS
2
ModelsofNonlinearDynamicProcesses
17
2.1
Modelsininput-outputformulae................19
2.1.1
Nonlinearityatinput...................19
2.1.2
Nonlinearityatoutput..................21
2.1.3
Somegeneralnonlinearmodels.............22
2.2
Modelsinstate-spaceformulae.................24
2.2.1
Nonlinearityatinput...................24
2.2.2
Nonlinearityatoutput..................25
2.2.3
Ageneralnonlinearstate-spacemodel.........26
2.3
Summary.............................27
3
InputNonlinearity
29
3.1
AdaptiveextremumcontrolforHammersteinmodel.....31
3.1.1
Themodi�edHammersteinmodel...........31
3.1.2
Extremumcontrollaw..................32
3.1.3
Parameterestimation
..................34
CONTENTS
xiii
3.1.4
Theadaptiveextremumcontrolalgorithm
.......35
3.2
Casestudies............................39
3.3
Convergenceanalysis.......................44
3.4
Summary.............................47
4
OutputNonlinearity
49
4.1
Basicextremumcontrollaw...................50
4.2
Theintermediatesignalismeasurable.............52
4.3
Theintermediatesignalisnotmeasurable...........59
4.3.1
TheEKFasaparameterestimatorforthenonlinear
system...........................60
4.3.2
TheRPEMappliedtotheinnovationsmodel.....69
4.3.3
Themodi�edrecursivepredictionerrormethod....76
4.4
Summary.............................82
5
Conclusions
85
Bibliography
89
xiv
CONTENTS
II
ModellingandControlofA
WindTurbine
95
Glossary
97
6
Introduction
101
6.1
Awindturbine..........................102
6.2
Theturbinecontrolproblem...................103
6.3
Outlineofthesecondpartofthethesis.............107
7
SimulationModeloftheWindTurbine
109
7.1
Introduction............................109
7.2
Windmodel............................111
7.2.1
Thepointwindspeed
..................112
7.2.2
Thewindexperiencedbytherotor...........115
7.2.3
Theapproximatede�ectivewindspeed
........115
7.3
Aerodynamics...........................120
7.3.1
Aerodynamicpowerandtorque.............122
CONTENTS
xv
7.3.2
3pe�ect..........................124
7.3.3
Axialforce
........................125
7.4
Structuraldynamics.......................126
7.5
Drivetrain
............................128
7.6
Generatormodel.........................130
7.6.1
Constantspeedpowergenerationunit.........131
7.6.2
Variablespeedpowergeneratorunit..........134
7.7
Pitchactuator
..........................135
7.8
Anentiremodel..........................137
7.9
Validationofmodel........................137
7.9.1
ValidationofT3P
model.................139
7.9.2
Validationresults.....................140
7.9.3
Anotherexperiment...................142
7.10Simulationoftheuncontrolledwindturbine..........143
7.11Summary.............................145
xvi
CONTENTS
8
DesignModeloftheWindTurbine
147
8.1
Linearstate-spacemodelsoftheplant.............149
8.1.1
Aerodynamictorque...................149
8.1.2
Drivetrainandgenerator................150
8.1.3
Abovetheratedwindspeed...............150
8.1.4
Belowtheratedwindspeed...............155
8.2
Noisemodels...........................157
8.3
Acompositemodel........................158
8.4
Discretetimemodel.......................159
8.5
Summary.............................161
9
EstimationofTheWindSpeed
163
9.1
TheNewton-Raphsonmethod..................165
9.2
TheKalman�ltermethod....................169
9.3
TheextendedKalman�ltermethod
..............172
9.3.1
Aboveratedwindspeed.................173
CONTENTS
xvii
9.3.2
Belowratedwindspeed
.................177
9.4
Acomparison...........................179
9.5
Test................................181
9.6
Discussion.............................184
9.7
Summary.............................186
10ControlAboveRatedPower
187
10.1PIpitchcontrol..........................190
10.2LQGpitchcontrol........................195
10.3Combinedvariablespeedandpitchcontrol
..........202
10.4Summary.............................207
11ControlBelowRatedPower
211
11.1LQGspeedcontrol........................214
11.2Trackingcontrol.........................221
11.3Implementationofcontrolsystem
................227
11.4Summary.............................230
xviii
CONTENTS
12SummaryandConclusions
233
Bibliography
241
A
OptimizationBackground
243
A.1
Searchingforanextremum
...................244
A.2
Hill-climbingalgorithm......................246
A.3
Gradientmethod.........................248
A.4
TheNewtonmethod.......................250
A.5
Gauss-Newtonmethod......................253
A.6
Linesearchtechnique
......................254
A.7
Summary.............................258
B
ConvergenceAnalysisforRecursiveAlgorithms
261
B.1
BasicideasofODEapproach
..................262
B.2
GeneralresultsofODE
.....................266
B.3
Localconvergenceofrecursiveleastsquarealgorithm.....268
CONTENTS
xix
C
TheEKFasaJointstateandParameterEstimator
271
C.1
ExtendedKalman�lter
.....................272
C.2
Thesystem
............................273
C.3
Themodel.............................274
C.4
Jointparameterandstateestimation..............274
C.5
Convergenceanalysis.......................280
D
TheRPEMethodAppliedtotheInnovationsModel
285
D.1Themodel.............................285
D.2Thealgorithm...........................286
E
TekniskeDataforWD34WindTurbine
291
PartI
AdaptiveExtremum
Control
1
3
Glossary
Notations
A,B,C,D
Matricesinstate-spacemodel
F,H,M
Matricesinstate-spacemodel
A(q�1)
A-polynomialinoperatorq�1forinput-outputmodel
B(q�1)
B-polynomialinoperatorq�1forinput-outputmodel
C(q�1)
C-polynomialinoperatorq�1forinput-outputmodel
e(t)
Whitenoise
f
Nonlinearfunction
g
Gradientmatrix
H
Hessianmatrix
K
Kalmangainmatrix
Kx
Stateupdatematrix
K�
Parameterupdatematrix
P(t)
R(t)�1
R(t)
HessianapproximationinGauss-Newtonalgorithm
u(t)
Inputsignal
up(t)
Perturbationsignal
V(�)
Criterion
x(t)
Statevector
y(t)
Outputsignal
w(t)
Noisesequence
W(t)
Gradientoftheestimatedstate
^y(t)
Predictorusingrunningestimate

4 z(t)
Intermediatesignal
�(t)
Predictionerror
�
Parametervector
^ �(t)
Recursiveestimateof�
� 0
Truevalueof�
��
Convergentpointof�
'(t)
Vectorformedfromobserveddata
�(t)
Gradientofthepredictionerror
�
Stepsize
�
Covariancematrixofpredictionerror
^ �(t)
Estimatedcovariancematrixofpredictionerror
�
Incrementoperator
Abbreviations
EKF
ExtendedKalmanFilter
LHP
LeftHalfPlane
ODE
OrdinaryDi�erentialEquation
PRBS
PseudorandomBinarySequence
RELS
RecursiveExtendedLeastSquares
RLS
RecursiveLeastSquares
RML
RecursiveMaximumLikelihood
RPEM
RecursivePredictionErrorMethod
Chapter1
Introduction
Inmostcontrolproblems,thetaskofaregulatoristokeepsomevariables
atconstantvalues,ortomakethemfollowreferencesignals.Ingeneral,the
systemisassumedtobelinear,anditispossible,inprinciple,todrivethe
outputtoanyprescribedvalue.Withsuchproblemsthereferencevalues
areofteneasilydetermined.Itcanbethedesiredaltitudeofanairplane,
theprede�nedconcentrationofaproduct.Inthesecasesthecontrolaction
istooptimizeacostfunctionbyinvolvinganestimatedsystemmodel.
Onotheroccasions,itcanbemoredi�cultto�ndthesuitablereference
valuesorthebestoperatingpointsofaprocess.Anumberofindustrial
processeshavethebehaviourthattheprocessshouldhaveashighe�ciency
aspossible,theirperformancecanbeimprovedbyadjustingplantvari-
ablessoastomaximizeorminimizetheperformancecriterion.Totracka
5
6
Chapter1.Introduction
varyingmaximumorminimumiscalledextremumcontrol.Therearesev-
eralexamplesofpracticalsystemsthatexhibitthistypeofbehaviour,e.g.,
powergenerationsystem,chemicalandcombustionprocesses.Oneappli-
cationisspark-ignitionautomotiveengine.Thefuelconsumptionofacar
depends,amongotherthings,ontheignitionangle.Thetaskofadaptive
extremumcontrolistoadjustsparkignitionangleandoperatetheengineat
apredeterminedoptimumvalue.Anotherexampleisore-grinding,where
thegrindinge�ciencywillvarywiththe�llingdegreeofthemill,which
canbecontrolledthroughtheincoming owofrawmaterial.Theoptimal
pointinmaximizinge�ciencymaydependonthequalityandcomposition
ofthisrawmaterial.Forawindturbine,thepitchangleofbladesorthe
rotorspeedofwindturbineischangeddependingonthewindspeedtogive
maximumoutputpower.Thisisalsoanextremumcontrolproblem.
Extremumcontrolsystemshaveonemajorcharacteristicincommon.In
theabsenceofdisturbance,thestaticresponsecurverelatingtheoutputs
toinputsisnonlinearandhasatleastoneextremum.Theobjectiveof
extremumcontrolistokeeptheprocessoperatingat,orinthevicinityof,
theextremumpointoftheperformancefunctionorprocessoutputdespite
changesintheprocessorin uenceofdisturbances.
Acommonassumptionisthatthereisnondynamicsinthesystem.Thisis
calledstaticsystem.Inpractice,thisconditioncanbeful�lledbyusinga
su�cientlylargesamplinginterval.Buttheresultmaybeaslowoptimiza-
tion.Inmanycases,however,staticmodelsmaybeadequate,andstochastic
approximationmethodscanthenbeusedforoptimizationtohandlenoise
measurements.
7
Actuallymorecommoncasesinpracticearetheinputsignalwillin uence
thesystem
behaviouratsubsequenttimes,i.e.,theperformancehasnot
settledatnewsteady-statevaluebeforethenextmeasurementistaken.
Thisissocalleddynamicsystem.Oneofmethodstohandlethiskindof
systemistoderiveanonlineardynamicmodel.
[Blackman1962]isagoodintroductiontothe�eldofextremumcontrol.
Theclassi�cationusedinthispaperisperturbationsystems,switchingsys-
temsandselfdrivingsystems.Intheperturbationsystems,thee�ectat
outputfromaknownsignaladdedtotheinputisusedtoderiveinforma-
tionabouttheslopeofthenonlinearity.Theinformationisthenusedto
drivethesystem
andkeeptheslopeasclosetozeroaspossible.Inaso
calledswitchingsystem,theinputisdrivenbyaconstantspeed ip- opwith
twostates.Iftheextremumispassed,thedirectionofinputdriftisthen
reversedaccordingtosome�xedrules.Thesystemcanthenbeoperatedin
theneighbourhoodoftheextremum.Theselfdrivingsystemsusemeasure-
mentsofthetimederivativeoftheoutputtodeterminetheinput.Ifthe
processisstartedinthecorrectdirection,itwillcontinueuntilextremum
isreached.
Afourthclassofmethodsthatisnotdescribedin[Blackman1962]hasbeen
developedlateron.Itisbasedonusingaparameterizedmodelincombining
parameteridenti�cationandextremumcontrol.Theprojectpresentedhere
isbasedonthistypeofmethods.
Sincefewerideasforextremumcontrolhaveemergedsince60's.Itisthen
stillworthmentioningthethreetypesofmethodsclassi�edby[Blackman196
Themethodswerelatersummarizedby[Sternby80b].

8 Chapter 1. Introduction
Perturbation methods
The basic idea of perturbation methods is to add a periodic test signal to
the control signal, and observe its e�ect at the output. The task of an
extremum controller in the perturbation methods is to keep the gradient of
the nonlinearity at zero.
Input
Output
Figure 1.1. E�ect of input test signal at the output for a static nonlinearity.
The e�ect of an input test signal at output of a static nonlinearity is illus-
trated in Figure 1.1. The most commonly used test signal form is sinusoid.
However, if the system contains dynamics, the dynamics will then introduce
a phase lag � in the test signal component of the output. The result of
correlation will be multiplied by a factor cos �. This gives a sign error
in the correlation signal if � > 900. This situation can be avoided if a
corresponding phase lag is introduced to the test signal before correlation.
Another way is to use a perturbation signal of su�ciently low frequency.
The phase lag will then be small, so that the dynamics can be neglected.
But this give a long response time for the overall system.
With the perturbation signal technique, the correlating device must be given
a certain amount of time to produce an accurate slope signal. During this
9
time the control signal should be kept constant, so that the total input
varies with test signal only.
The perturbation methods may be the oldest extremum control method.
But it is also well suited to multi-input systems. In order to apply a gradient
method in search for an extremum, the partial derivatives of the static
response curve with respect to the di�erent inputs are needed. This can
be realized by using perturbation signals with di�erent frequencies for each
input.
Switching methods
Another basic idea for extremum control is the switching methods. The
input is driven at constant speed in the same direction until no further
improvement is registered. The drift direction is then reversed. Di�erent
algorithms of this type can be described in terms of their speci�c conditions
for altering the direction of input changes. The control law is thus a set of
switching conditions. The input may be changed continuously or in discrete
steps. The second one is called stepping method.
In a continuous sweep method, the sweep direction is reversed when the
output has decreased from its maximum value by a �xed amount �. The
design parameters are then the sweep rate and the value of �. If the output
is disturbed by noise, the method may give excessive switching unless the
value of � is su�ciently increased. But it will on the other hand increase the
hunting loss by increasing �. It is then necessary to compromise in choosing
�. Filtering is another possibility for reducing the noise sensitivity. The
problem is then that more dynamics are introduced into the system, and
the hunting loss will again be increased. Unnecessary switching may also
be caused by input dynamics. The switching conditions may be chosen
10 Chapter 1. Introduction
in many ways. Since the derivative of the output should be zero at an
extremum point, it can be used to determine when to reverse the sweeping
direction. If a threshold is introduced, The switching did not occur until
the derivative was less than �� after passage of the maximum.
The stepping method gives the input signal
�u(t+ 1) = �u(t) sign(�y(t)) (1.1)
where u(t) and y(t) are input and output signal for a static system. With
this control law, the closed-loop system will then end up with input oscil-
lating a few steps around the extremum point. The method is also called
hill-climbing method which is given in Appendix A. There are two design
parameters to choose in such a system: the stepping period and step length.
The method converges quickly by a large step size, but on the other hand it
will cause a large deviation from the optimum. A variable step size might
then be useful, but it will increase the complexity of the algorithm. The
stepping period should be kept as small as possible in order to speed up the
system. But when dynamics are included in the model, the easiest way to
handle the system is to wait for the steady state between each input change.
Measurement noise will introduce a risk of stepping in the wrong direction.
The steady state deviations from the optimum will then be increased.
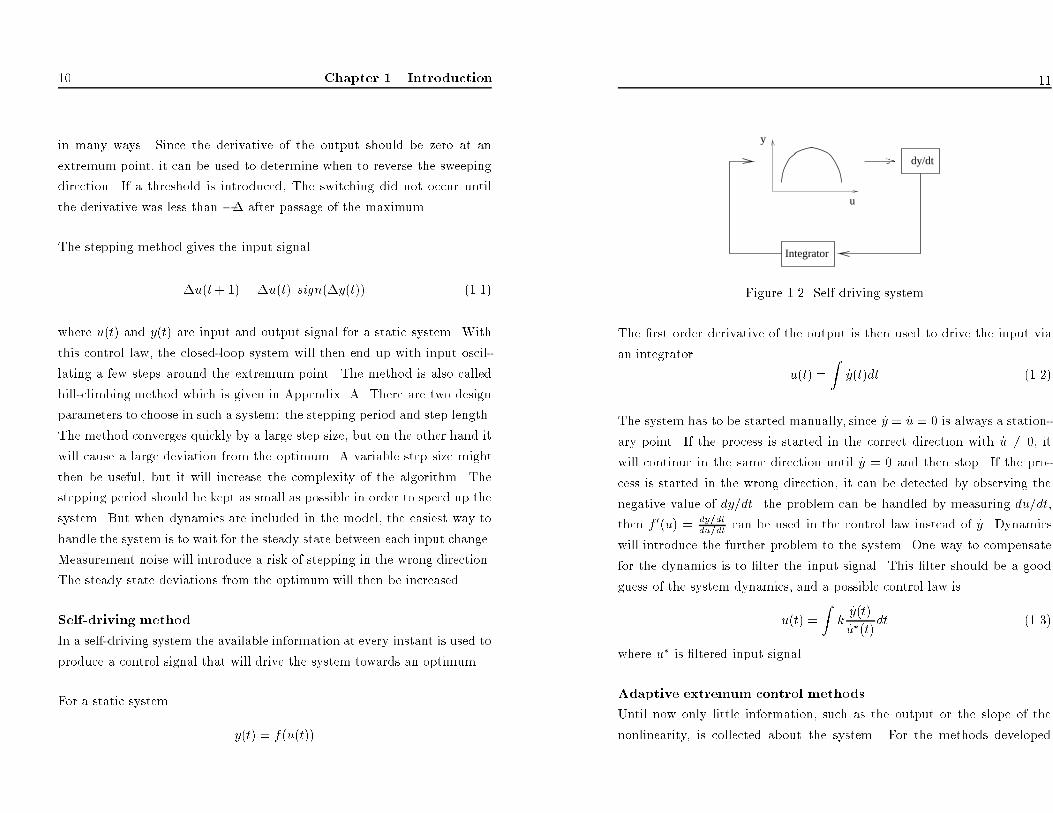
Self-driving method
In a self-driving system the available information at every instant is used to
produce a control signal that will drive the system towards an optimum.
For a static system
y(t) = f(u(t))
11
u
y
dy/dt
Integrator
Figure 1.2. Self driving system
The �rst order derivative of the output is then used to drive the input via
an integrator
u(t) =Z
_y(t)dt (1.2)
The system has to be started manually, since _y = _u = 0 is always a station-
ary point. If the process is started in the correct direction with _u 6= 0, it
will continue in the same direction until _y = 0 and then stop. If the pro-
cess is started in the wrong direction, it can be detected by observing the
negative value of dy=dt. the problem can be handled by measuring du=dt,
then f 0(u) = dy=dt
du=dtcan be used in the control law instead of _y. Dynamics
will introduce the further problem to the system. One way to compensate
for the dynamics is to �lter the input signal. This �lter should be a good
guess of the system dynamics, and a possible control law is
u(t) =Z
k_y(t)
_u�(t)dt (1.3)
where u� is �ltered input signal.
Adaptive extremum control methods
Until now only little information, such as the output or the slope of the
nonlinearity, is collected about the system. For the methods developed
12 Chapter 1. Introduction
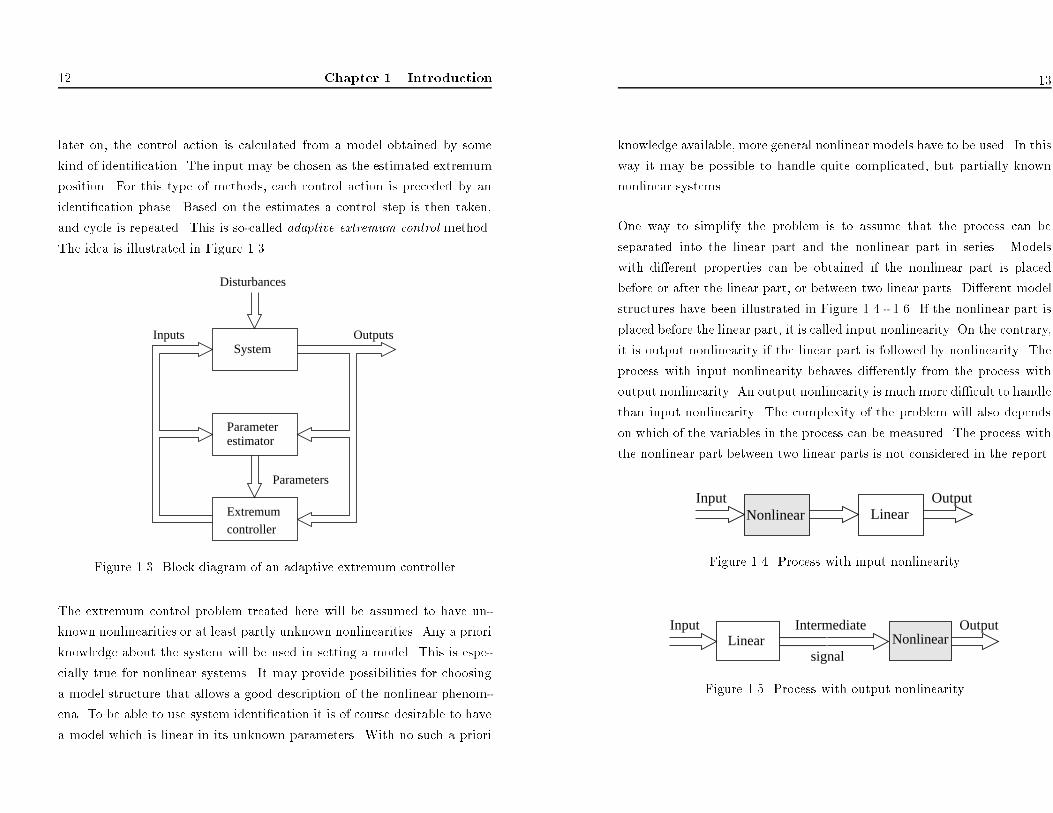
later on, the control action is calculated from a model obtained by some
kind of identi�cation. The input may be chosen as the estimated extremum
position. For this type of methods, each control action is preceded by an
identi�cation phase. Based on the estimates a control step is then taken,
and cycle is repeated. This is so-called adaptive extremum control method.
The idea is illustrated in Figure 1.3.
Outputs
Parameterestimator
Extremumcontroller
System
Disturbances
Parameters
Inputs
Figure 1.3. Block diagram of an adaptive extremum controller
The extremum control problem treated here will be assumed to have un-
known nonlinearities or at least partly unknown nonlinearities. Any a priori
knowledge about the system will be used in setting a model. This is espe-
cially true for nonlinear systems. It may provide possibilities for choosing
a model structure that allows a good description of the nonlinear phenom-
ena. To be able to use system identi�cation it is of course desirable to have
a model which is linear in its unknown parameters. With no such a priori
13
knowledge available, more general nonlinear models have to be used. In this
way it may be possible to handle quite complicated, but partially known
nonlinear systems.
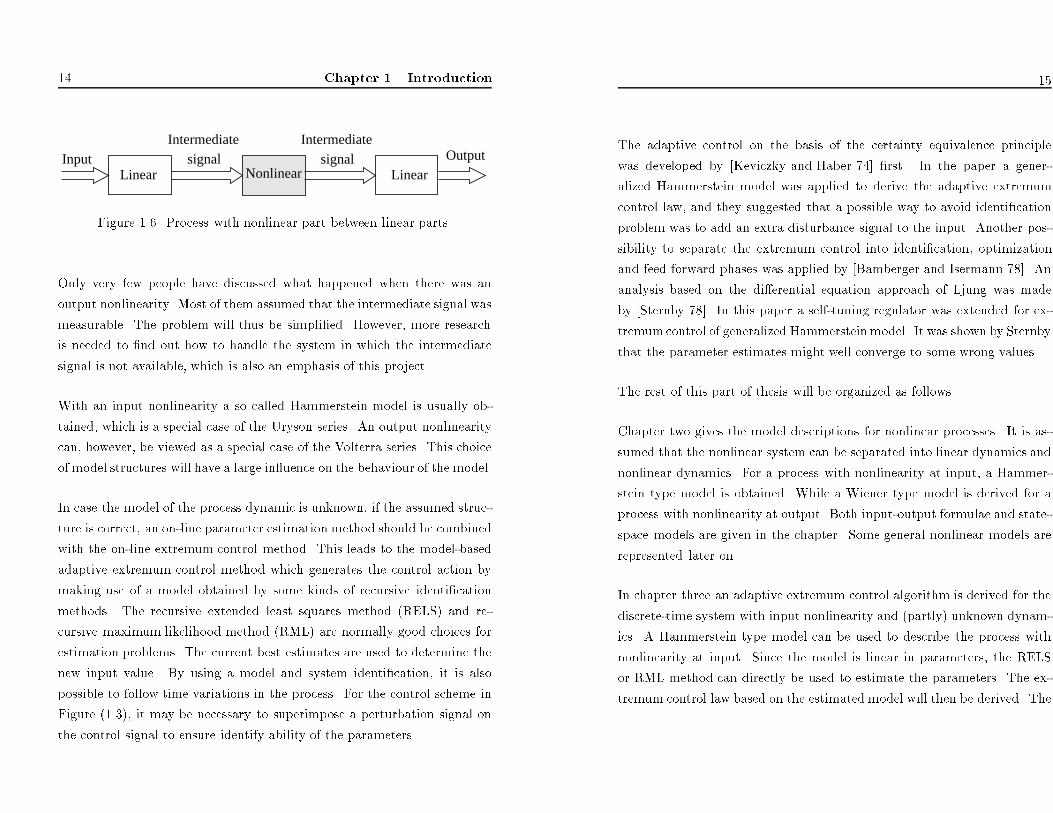
One way to simplify the problem is to assume that the process can be
separated into the linear part and the nonlinear part in series. Models
with di�erent properties can be obtained if the nonlinear part is placed
before or after the linear part, or between two linear parts. Di�erent model
structures have been illustrated in Figure 1.4 - 1.6. If the nonlinear part is
placed before the linear part, it is called input nonlinearity. On the contrary,
it is output nonlinearity if the linear part is followed by nonlinearity. The
process with input nonlinearity behaves di�erently from the process with
output nonlinearity. An output nonlinearity is much more di�cult to handle
than input nonlinearity. The complexity of the problem will also depends
on which of the variables in the process can be measured. The process with
the nonlinear part between two linear parts is not considered in the report.
NonlinearInput Output
Linear
Figure 1.4. Process with input nonlinearity
OutputInput Intermediate
signalNonlinearLinear
Figure 1.5. Process with output nonlinearity
14 Chapter 1. Introduction
InputLinear
IntermediateIntermediatesignal
Nonlinearsignal
LinearOutput
Figure 1.6. Process with nonlinear part between linear parts.
Only very few people have discussed what happened when there was an
output nonlinearity. Most of them assumed that the intermediate signal was
measurable. The problem will thus be simpli�ed. However, more research
is needed to �nd out how to handle the system in which the intermediate
signal is not available, which is also an emphasis of this project.
With an input nonlinearity a so called Hammerstein model is usually ob-
tained, which is a special case of the Uryson series. An output nonlinearity
can, however, be viewed as a special case of the Volterra series. This choice
of model structures will have a large in uence on the behaviour of the model.
In case the model of the process dynamic is unknown, if the assumed struc-
ture is correct, an on-line parameter estimation method should be combined
with the on-line extremum control method. This leads to the model-based
adaptive extremum control method which generates the control action by
making use of a model obtained by some kinds of recursive identi�cation
methods. The recursive extended least squares method (RELS) and re-
cursive maximum likelihood method (RML) are normally good choices for
estimation problems. The current best estimates are used to determine the
new input value. By using a model and system identi�cation, it is also
possible to follow time variations in the process. For the control scheme in
Figure (1.3), it may be necessary to superimpose a perturbation signal on
the control signal to ensure identify ability of the parameters.
15
The adaptive control on the basis of the certainty equivalence principle
was developed by [Keviczky and Haber 74] �rst. In the paper a gener-
alized Hammerstein model was applied to derive the adaptive extremum
control law, and they suggested that a possible way to avoid identi�cation
problem was to add an extra disturbance signal to the input. Another pos-
sibility to separate the extremum control into identi�cation, optimization
and feed forward phases was applied by [Bamberger and Isermann 78]. An
analysis based on the di�erential equation approach of Ljung was made
by [Sternby 78]. In this paper a self-tuning regulator was extended for ex-
tremumcontrol of generalized Hammersteinmodel. It was shown by Sternby
that the parameter estimates might well converge to some wrong values.
The rest of this part of thesis will be organized as follows.
Chapter two gives the model descriptions for nonlinear processes. It is as-
sumed that the nonlinear system can be separated into linear dynamics and
nonlinear dynamics. For a process with nonlinearity at input, a Hammer-
stein type model is obtained. While a Wiener type model is derived for a
process with nonlinearity at output. Both input-output formulae and state-
space models are given in the chapter. Some general nonlinear models are
represented later on.
In chapter three an adaptive extremum control algorithm is derived for the
discrete-time system with input nonlinearity and (partly) unknown dynam-
ics. A Hammerstein type model can be used to describe the process with
nonlinearity at input. Since the model is linear in parameters, the RELS
or RML method can directly be used to estimate the parameters. The ex-
tremum control law based on the estimated model will then be derived. The

16
Chapter1.Introduction
inputsignaltotheprocessischosenastheestimatedpositionoftheopti-
mumwithasuperimposedperturbationsignalwhichassuresthepersistent
excitationoftheprocess.Twoexamplesaregiventoassesstheperformance
ofalgorithm.Theconvergencepropertiesofthealgorithmareanalysedby
usingtheODEapproach.
Chapterfourconcernstheprocesswithnonlinearityatoutput.Theex-
tremumcontrolproblemisingeneralmuchdi�culttohandleinthiscase.
However,aspecialcaseiswhentheintermediatesignalbetweenthelinear
andnonlinearpartcanbemeasured.Theproblemwillbesimpli�ed.The
identi�cationcanbeimplementedforlinearpartandnonlinearpartsepa-
rately,andtheextremumcontrollawcanthenbederivedbasedonstatic
optimizationofaperformancefunction.Whentheintermediatesignalisnot
measurable,theemphasiswillgivetotheparameteridenti�cation,sincethe
extremumcontrollawreliesheavilyontheestimatedmodel.Theextended
Kalman�lter(EKF)methodusedasajointparameterandstateestimator
isimplementedforanonlinearstate-spacemodel.Therecursivepredic-
tionerrormethodandtherecursivelinesearchpredictionerrormethodare
derivedforanonlinearinnovationsmodel.Thebehaviourofthedi�erent
estimationmethodsisinvestigatedbysimulationexamples.
Chapter�vegivessummaryandconclusionsoftheinvestigationsinthe
previouschapters.
Chapter2
ModelsofNonlinear
DynamicProcesses
Asitismentionedinchapter1,thekeypointofextremumcontrolisthe
basicassumptionofamodelwhichdescribestheperformancefunctionor
theprocessdynamics.Themostimportantfeatureisthattheprocessis
assumedtobenonlinear,andthebiggestproblemisthentochooseaproper
modelstructure,sincethemodel-basedextremumcontrolmethodsgenerate
thecontrolactionbymakinguseofamodelobtainedbysomekindof
identi�cationmethod.
Themathematicaldescriptionsofthenonlinearsystemshavebeenthe
subjectinmanyarticles.Somefrequentlyappliedmodelsaregivenby
17
18 Chapter 2. Models of Nonlinear Dynamic Processes
[Haber and Keviczky 76] and [Vadstrup 85]. However, only discrete-time
systems are considered in this thesis.
The static response curve relating input to output in extremum control sys-
tems is inherently nonlinear. A general description of a nonlinear discrete-
time model is
y(t) = f(y(t � 1); y(t� 2); � � � ; u(t� d); u(t� d� 1); � � � ; �; t) + !(t) (2.1)
where f is a nonlinear function and assumed that an extremum value exists.
y(t), u(t) and !(t) denote the output, input and random disturbance signals
respectively. d is time delay, � is a vector of unknown parameters that may
change with time. The sequence fy(t)g might be some measurements of the
system output or a performance function.
Nonlinear systems have many di�erent types. For special classes of non-
linear systems where the linear dynamics and nonlinear dynamics can be
separated, the methods worked out for the identi�cation of linear discrete-
time systems can be extended to the nonlinear systems. If we assume that
the nonlinear part can be placed before or after the linear part, or between
two linear parts, the block schemes for these three most well-known forms
have been shown in chapter 1, the models with di�erent properties can be
obtained. If the nonlinear part is placed before the linear part, it is input
nonlinearity. Otherwise it is output nonlinearity if the nonlinearity is at
output.
The remainder of this chapter is organized as follows. Section 2.1 presents
the nonlinear dynamic models in simple input-output relationships. Sec-
tion 2.2 contains the state-space descriptions of nonlinear dynamic systems.
Both process with input nonlinearity and process with output nonlinearity
are represented. Particular interest in this chapter is given to the models
2.1 Models in input-output formulae 19
being linear in parameters, since identi�cation methods can easily be im-
plemented to estimate model parameters. A summary is given in section
2.3.
2.1 Models in input-output formulae
2.1.1 Nonlinearity at input
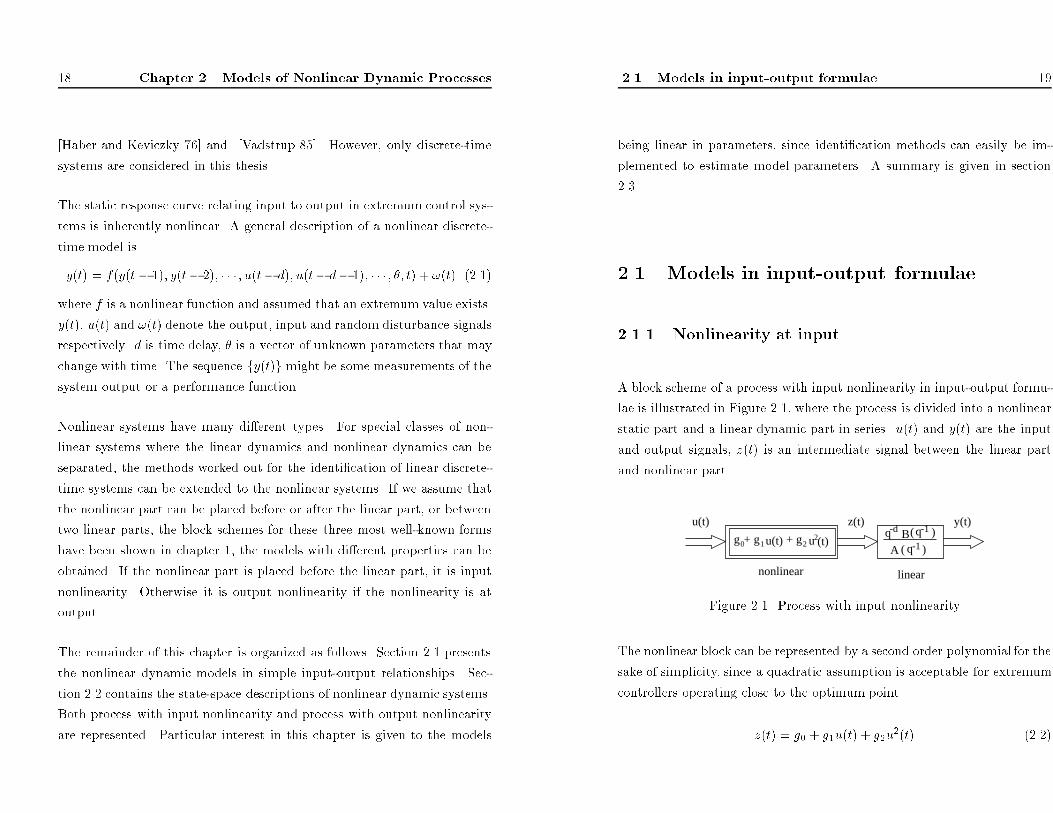
A block scheme of a process with input nonlinearity in input-output formu-
lae is illustrated in Figure 2.1, where the process is divided into a nonlinear
static part and a linear dynamic part in series. u(t) and y(t) are the input
and output signals, z(t) is an intermediate signal between the linear part
and nonlinear part.
y(t)B q )-1(-dqq-1A
(t))(
z(t)
linear
u(t)
nonlinear
g0+ g1 u(t) + g2 u2
Figure 2.1. Process with input nonlinearity
The nonlinear block can be represented by a second order polynomial for the
sake of simplicity, since a quadratic assumption is acceptable for extremum
controllers operating close to the optimum point.
z(t) = g0 + g1u(t) + g2u2(t) (2.2)

20 Chapter 2. Models of Nonlinear Dynamic Processes
The linear block can be obtained by describing it as a linear di�erence
equation
A(q�1)y(t) = q�dB(q�1)z(t) (2.3)
where d is time delay, and
A(q�1) = 1 + a1q�1 + � � �+ anaq�na
B(q�1) = b0 + b1q�1 + � � �+ bnbq�nb (2.4)
are the polynomials in backward shift operator q�1.
Combining two models gives the representation for the whole process
A(q�1)y(t) = q�dB(q�1)[g0 + g1u(t) + g2u2(t)]
= g0 �B + g1B(q�1)u(t� d) + g2B(q�1)u2(t � d)(2.5)
where �B = B(1). This is a simple Hammerstein model that can be extended
to a generalized Hammerstein model
A(q�1)y(t) = b00 +B1(q�1)u(t� d) +B2(q�1)u2(t� d) (2.6)
where
A(q�1) = 1 + a1q�1 + � � �+ anaq�na
B1(q�1) = b10 + b11q�1 + � � �+ b1nb1q�nb1 (2.7)
B2(q�1) = b20 + b21q�1 + � � �+ b2nb2q�nb2
Thus we get a system equation which is linear in parameters and can directly
be written in regressive form
y(t) = 'T (t)� (2.8)
where � is the parameter vector, '(t) is a vector which includes previous
input and output signals.
2.1 Models in input-output formulae 21
The models of Hammerstein type have been used quite often in extremum
control systems. The Hammerstein representation is very popular since it is
a good picture of the reality, and linear in terms of the unknown parameters
of the system. Most identi�cation methods are based on the assumption
that the model is linear in parameters.
2.1.2 Nonlinearity at output
For the general description of the nonlinear model in input-output formula
(2.1), if the process has the nonlinearity at output, the model can then be
illustrated by Figure 2.2.
z(t)u(t)B q )-1(-dqq-1 (t)
A )(
linear
y(t)
nonlinear
g0+ g1z(t) + g2 z2
Figure 2.2. Process with output nonlinearity
For an output nonlinearity, the model of linear block can be written as
A(q�1)z(t) = q�dB(q�1)u(t) (2.9)
where
A(q�1) = 1 + a1q�1 + � � �+ anaq�na
B(q�1) = b0 + b1q�1 + � � �+ bnbq�nb (2.10)
The model of the nonlinear block is given by
y(t) = g0 + g1z(t) + g2z2(t) (2.11)

22
Chapter2.ModelsofNonlinearDynamicProcesses
Thewholemodelcanbeobtainedbyinserting(2.9)into(2.11).Thisgives
y(t)=g 0+g 1
B(q�1)
A(q�1)
u(t�d)+g 2
� B(q�1)
A(q�1)
u(t�d)� 2(2.12)
ThisisasimpleWienermodel,anditcanbeextendedtoageneralized
Wienermodel y
(t)=g 0+
B1(q�1)
A(q�1)
u(t�d)+
� B 2(q�1)
A(q�1)
u(t�d)� 2(2.13)
where
A(q�1)=1+a1q�1+���+anaq�na
B1(q�1)=b 10+b 11q�1+���+b 1nb1
q�nb1
(2.14)
B2(q�1)=b 20+b 21q�1+���+b 2nb2
q�nb2
ItcanbeeasilyfoundthattheWienertypemodelsarenonlinearinparam-
eters.Mostidenti�cationmethodscannotbeusedtoestimateparameters
ofthistypeofmodels.
2.1.3
Somegeneralnonlinearmodels
Ifthemodelofnonlinearblock(2.2)fortheprocesswithinputnonlinearity
isextendedtok=1;2;���l,i.e.,
z(t)=
l X k=0
g kuk(t)
(2.15)
themodeloftheprocesswithinputnonlinearity(2.5)willthenbemodi�ed
by
A(q�1)y(t)=q�dB(q�1)
" l X k=0
g kuk(t)# =
l X k=0
g kB(q�1)uk(t�d)
(2.16)
2.1
Modelsininput-outputformulae
23
Themodelcanberewrittenas
A1(q�1)y(t)=b 00+
l X k=1
Bk(q�1)uk(t�d)
(2.17)
whichcanbegeneralizedtoafeedbackHammersteinmodel
A1(q�1)y(t)=b 00+
l X k=1
Bk(q�1)uk(t�d)+
j X k=2
Ak(q�1)yk(t)
(2.18)
where
A1(q�1)=1+a1q�1+���+anaq�na
Ak(q�1)=ak1q�1+���+aknakq�nak
k=2;���j
(2.19)
Bk(q�1)=b k0+b k1q�1+���+b knbkq�nbk
k=1;���l
Furthermore,theabovemodelisstillaspecialcaseofthefeedbackUryson
model
A1(q�1)y(t)=b 00+
l X k=1
Bk(q�1)fk(u(t�d))+
j X k=2
Ak(q�1)gk(y(t))(2.20)
Byincludingthetermswhichdescribetheinteractionofu(t�d)andy(t),
ageneralnonlinearmodelwillberepresentedby
A1(q�1)y(t)=b 00+
l X k=1
Bk(q�1)fk(u(t�d))+
j X k=2
Ak(q�1)gk(y(t))
+
m X k=1
Dk(q�1)hk(u(t�d);y(t))
(2.21)
wherethepolynomialsAk(q�1)andBk(q�1)aregivenby(2.19),andpoly-
nomialDk(q�1)is
Dk(q�1)=dk1q�1+���+dkndkq�ndk
k=1;���m
(2.22)
24 Chapter 2. Models of Nonlinear Dynamic Processes
In Uryson model (2.20), function fk and gk depend only on u(t � d) and
y(t). If we wish to generalize it, another type of model, the Volterra model,
can also be used to model the process with output nonlinearity. For the
sake of simplicity, only model of second degree are presented
A1(q�1)y(t) = g0 + B1(q�1)u(t) +
lXk=0
B2k(q�1)u(t)u(t� k)
+
jXk=0
A2k(q�1)y(t)y(t � k) (2.23)
where
A1(q�1) = 1 + a11q�1 + � � �+ a1na1q�na
B1(q�1) = b10 + b11q�1 + � � �+ b1nb1q�nb1
A2k(q�1) = a2k1q�1 + � � �+ aak(j�k)q�(j�k)
B2k(q�1) = b2k0 + b2k1q�1 + � � �+ b2k(l�k)q�(l�k)
(2.24)
This is called the second order feedback Volterra model.
2.2 Models in state-space formulae
2.2.1 Nonlinearity at input
A simple Hammerstein model can also be represented in state-space form.
The description is illustrated in Figure 2.3.
The nonlinear block of the process can be represented by equation (2.2),
and the linear block isx(t+ 1) = Ax(t) + Bz(t)
y(t) = Cx(t) +Dz(t)
(2.25)
2.2 Models in state-space formulae 25
C Σ
y(t)
delayUnitΣB
A
D
linear
x(t)g0+ g1z(t) + g2 z2(t)
nonlinear
z(t)u(t)
Figure 2.3. Process with input nonlinearity in state-space form
where x(t) is a state vector. Matrices A, B, C andD are assumed to be time
invariant. These two models would give a state-space form of the simple
Hammerstein model
x(t+ 1) = Ax(t) + B[g0 + g1u(t) + g2u2(t)]
y(t) = Cx(t) +D[g0 + g1u(t) + g2u2(t)]
(2.26)
which can be generalized to
x(t+ 1) = Ax(t) + b0 + B1u(t) +B2u2(t)
y(t) = Cx(t) + d0 +D1u(t) +D2u2(t)
(2.27)
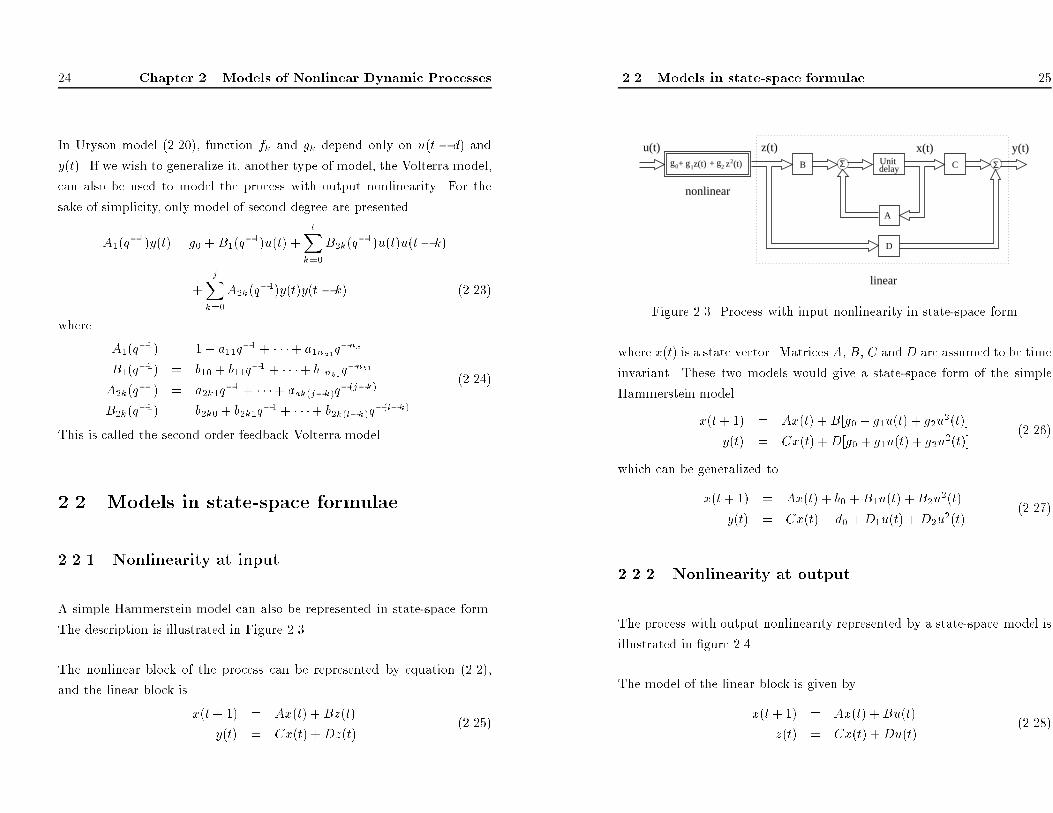
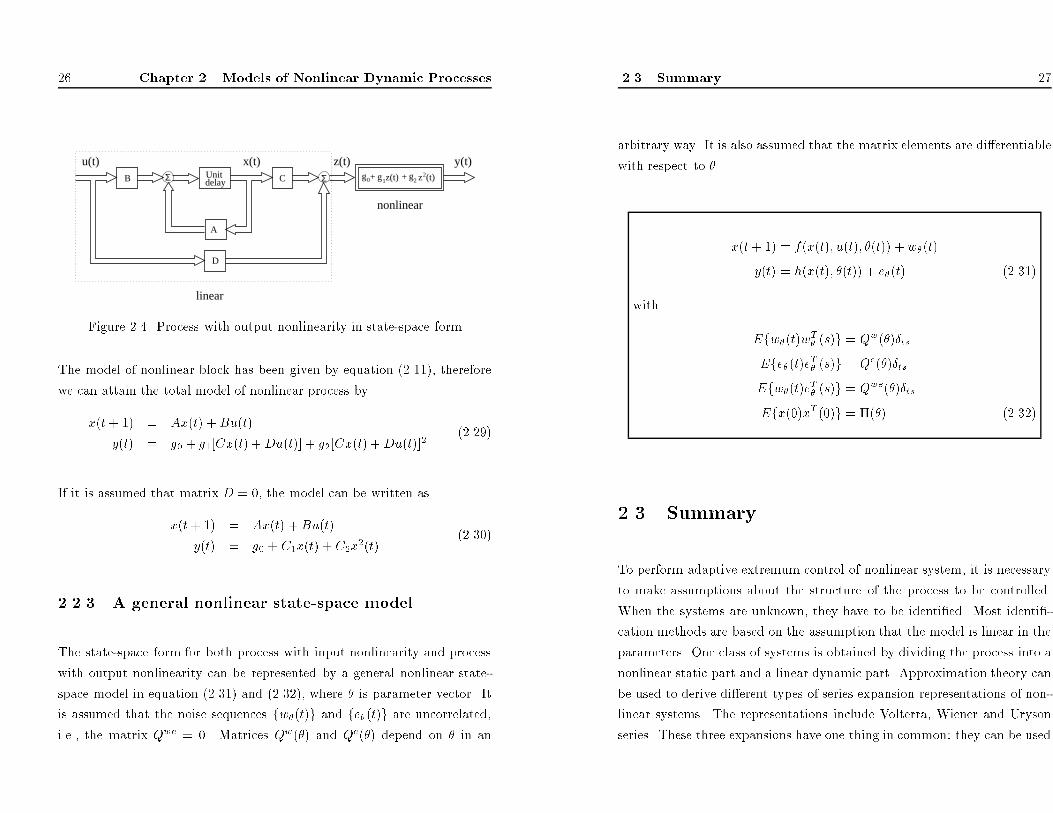
2.2.2 Nonlinearity at output
The process with output nonlinearity represented by a state-space model is
illustrated in �gure 2.4.
The model of the linear block is given by
x(t+ 1) = Ax(t) +Bu(t)
z(t) = Cx(t) +Du(t)
(2.28)
26 Chapter 2. Models of Nonlinear Dynamic Processes
g0
x(t)+ g1z(t) + g2 z2(t)C Σdelay
UnitΣB
A
D
y(t)
linear
nonlinear
u(t) z(t)
Figure 2.4. Process with output nonlinearity in state-space form
The model of nonlinear block has been given by equation (2.11), therefore
we can attain the total model of nonlinear process by
x(t+ 1) = Ax(t) +Bu(t)
y(t) = g0 + g1[Cx(t) +Du(t)] + g2[Cx(t) +Du(t)]2
(2.29)
If it is assumed that matrix D = 0, the model can be written as
x(t+ 1) = Ax(t) +Bu(t)
y(t) = g0 + C1x(t) + C2x2(t)
(2.30)
2.2.3 A general nonlinear state-space model
The state-space form for both process with input nonlinearity and process
with output nonlinearity can be represented by a general nonlinear state-
space model in equation (2.31) and (2.32), where � is parameter vector. It
is assumed that the noise sequences fw�(t)g and fe�(t)g are uncorrelated,
i.e., the matrix Qwe = 0. Matrices Qw(�) and Qe(�) depend on � in an
2.3 Summary 27
arbitrary way. It is also assumed that the matrix elements are di�erentiable
with respect to �.x(t+ 1) = f(x(t); u(t); �(t)) +w�(t)
y(t) = h(x(t); �(t)) + e�(t) (2.31)
with
Efw�(t)wT� (s)g = Qw(�)�ts
Efe�(t)eT� (s)g = Qe(�)�ts
Efw�(t)eT� (s)g = Qwe(�)�ts
Efx(0)xT (0)g = �(�) (2.32)
2.3 Summary
To perform adaptive extremum control of nonlinear system, it is necessary
to make assumptions about the structure of the process to be controlled.
When the systems are unknown, they have to be identi�ed. Most identi�-
cation methods are based on the assumption that the model is linear in the
parameters. One class of systems is obtained by dividing the process into a
nonlinear static part and a linear dynamic part. Approximation theory can
be used to derive di�erent types of series expansion representations of non-
linear systems. The representations include Volterra, Wiener and Uryson
series. These three expansions have one thing in common: they can be used

28
Chapter2.ModelsofNonlinearDynamicProcesses
tomodelprocesseswherelineardynamicsisfollowedbyanonlinearity.The
Urysonseriescan,however,alsoincludenonlinearitiesattheinput.Aspe-
cialcaseofUrysonseriesisrepresentedbyHammersteinmodels,whichhave
theadvantagethatthemodelislinearintheparameters.
Chapter3
InputNonlinearity
Theideaofanextremumcontrollerwhichcombinesarecursiveestimation
algorithmwithasynthesisalgorithmwillbeinvestigatedinthischapterfora
processwithinputnonlinearity.Withthenonlinearityattheinputitiseasy
tosetupamodelwhichislinearintheparameters,andthusdirectlylends
itselftoparameterestimationandadaptivecontrol.Theextremumcontrol
lawisderivedbasedonstaticoptimizationofaperformancefunction.This
isanimportantpracticalproblem,sinceanumberofindustrialprocessesare
suchthattheirperformancecanbeimprovedbyadjustingplantvariables
soastoincreasethee�ciencyoftheprocesses.
Inordertosimplifythenotationsandanalysis,onlyaspecialloworder
caseofthemodelwillbetaken.Thesystemconsideredisofasecondorder
Hammersteinmodelwithorwithoutdynamics.Theprocesswithhigher
orderdynamicmodelcanbetreatedinthesimilarway.
29

30
Chapter3.InputNonlinearity
Someoptimizationbackgroundconsideredtobeofparticularrelevanceto
theextremumcontrolproblemsisgiveninAppendix
A.Thealgorithms
includethehill-climbingmethod,gradientmethod,NewtonandGauss-
Newtonmethod.Theextremum
controllawderivedinthischaptercan
beconsideredasadirectimplementationoftheNewtoniteration.
Whenthesystemdynamicisunknown,themodelhastobeidenti�ed.An
identi�cationmethod,e.g.,therecursiveextendedleastsquaresmethod,for
theHammersteintypemodelswillbepresented.Basedonthecurrentbest
estimatedparameters,anon-lineextremumcontrollawisderived.
Thischapterisorganizedasfollows.Section3.1isconcernedwithadaptive
extremumcontrolfortheprocesswithinputnonlinearity.Someexamples
aregiventoillustratetheperformanceofthealgorithminsection3.2.The
convergencepropertyofthealgorithmisdiscussedinsection3.3.Thesum-
maryandconclusionsaregiveninsection3.4.
3.1
Adaptiveextremum
controlforHammersteinmodel
31
3.1
Adaptiveextremum
controlforHammer-
steinmodel
3.1.1
Themodi�edHammersteinmodel
Inmanyinvestigationsofextremumcontrolsystemsitisassumedthatthe
systemsarestatic,i.e.,inputsignalhasonlyaninstantaneouse�ect.This
assumptioncanbejusti�edifthetimebetweenthechangesinthereference
valueissu�cientlylong.Atypicaldescriptionofthestaticsystemis
y(t)=b 0+B1(q�1)u(t�d)+B2(q�1)u2(t�d)+!(t)
(3.1)
Iftherearedynamicsintheprocess,theinputsignalwillin uencethesys-
tembehaviouratsubsequenttimes.Itmeansthattheperformancemaynot
havesettledatnewsteady-statevaluebeforethenextmeasurementistaken.
Thiswillgiveaninteractioninthecontrolsystem.Thecorrelationandin-
teractionbetweendi�erentmeasurementsoftheperformancewillconfuse
theoptimizationroutine.Thereforeitisnecessarytotakethedynamicsinto
considerationwhendoingtheoptimization.Onepossibilitydiscussedabove
istowaituntilthetransientshavevanishedbeforethenextchangeismade.
Ofcourse,thiswillincreasetheconvergencetime,especiallyiftheprocess
haslongtimeconstants.Anotherwayaroundtheproblemistobasethe
optimizationonnonlineardynamicmodel[� Astr�omandWittenmark89].
AnonlineardynamicmodelofHammersteintypefortheprocesswithinput
nonlinearityhasbeengivenin(2.6)inchapter2.Tobemorespeci�c,ifthe
measurementsofprocessoutputorperformanceistypicallycorruptedby

32
Chapter3.InputNonlinearity
noise,itisthennecessarytotakethenoisemodelintoaccount.Therefore
thegeneralizedHammersteinmodel(2.6)ismodi�edby
A(q�1)y(t)=b 0+B1(q�1)u(t�d)+B2(q�1)u
2(t�d)+C(q�1)e(t)
(3.2)
with
A(q�1)=1+a1q�1+���+anaq�na
B1(q�1)=b 10+b 11q�1+���+b 1nb1
q�nb1
B2(q�1)=b 20+b 21q�1+���+b 2nb2
q�nb2
C(q�1)=1+c 1q�1+���+c ncq�nc
whereu(t),andy(t)aretheinputandoutputsignals,e(t)isawhitenoise
withzeromeannormaldistribution.
3.1.2
Extremum
controllaw
Thepurposeoftheextremumcontrolistomaintaintheoutputascloseas
possibletotheextremumdespitethein uenceofdisturbances.Itmeans
thatthecontrolobjectiveistomaximizeorminimizetheperformancefunc-
tion
J(u(t))=Efy(t+d)g
(3.3)
whereEdenotestheexpectationoperator,y(t)istheoutputsignaloraper-
formancefunction.IfitisassumedthattheperformancefunctionJ(�)has
the�rstandsecondorderderivatives,thecontrollawcanthenbeachieved
3.1
Adaptiveextremum
controlforHammersteinmodel
33
by
dJ d
u=0
(3.4)
Admissiblecontrollawmayusealltheinformationavailable,i.e.,u(t)may
dependony(t)andallpreviousinputsandoutputs.
Considerasystem
withinputnonlinearity,whichcanberepresentedby
thegeneralizedHammersteinmodel(3.2),thestaticcharacteristicsofthe
processwillbe
� Ay=b 0+� B1u+� B2u2
(3.5)
Sincetheextremumcontrolistomakethesteady-statevalueofoutputas
loworashighaspossible,theresultingcontrollerwillbederivedfromthe
staticresponsetoseektheoptimalinput.
u(t)=�
� B1
2� B2
(3.6)
andoptimalvalueoftheoutputis
y�=
b 0 � A�
� B2 1
4� A� B2
(3.7)
Theextremumcontrolleristhusaconstantgainandnofeedbackcontroller.
Intheadaptivecaseaconstantgaincontrollerwillreducetheexcitationof
theprocessandidenti�abilitymaybelost.
Theextremumcontrollawcanbeinterpretedasadirectimplementationof
Newtoniteration
u(t+1)=u(t)�
� dy du
� d2y
du2
� u(t)
=u(t)�
� � B 1+2� B2u(t)
2� B2
�
(3.8)
=�
� B1
2� B2

34
Chapter3.InputNonlinearity
Theequivalenceoftheself-tuningadjustmentruleandNewtoniteration
caneasilybeseen.
3.1.3
Parameterestimation
Iftheparametersofthemodelareunknown,theideaistouseanon-line
recursiveestimationproceduretoidentifythem,andateachadjustment
stepusethecurrentbestestimatestodeterminethenewvalueofu(t).
IfC(q�1)=1inthemodel(3.2),theordinaryleast-squaresmethodcan
thenbeuseddirectlytoestimateparameters.IfC(q�1)6=1,itisthen
necessarytoapproximateandusee.g.therecursiveextendedleast-squares
(RELS)methodortherecursivemaximumlikelihood(RML)method.
IfwetakethecaseofC(q�1)6=1,themodel(3.2)canbewrittenas
y(t)='T(t)�+�(t)
(3.9)
where '
(t)=[�y(t�1);���;�y(t�na);1;u(t�d);���;u(t�nb1�d);
u2(t�d);���;u2(t�nb2�d);�(t�1);���;�(t�nc)]T
(3.10)
�=[a1;���;ana;b0;b10;���;b1nb1;b20;���;b2nb2;c1;���;c nc]T
and
�(t)=y(t)�'T(t)^ �(t�1)
(3.11)
TheestimatesusingRELSmethodaregivenbyequations
3.1
Adaptiveextremum
controlforHammersteinmodel
35
^y(t)='T(t)^ �(t�1)
^ �(t)=^ �(t�1)+k(t)[y(t)�^y(t)]
k(t)=P(t)'(t)[�(t)+'T(t)P(t)'(t)]�1
P(t+1)=[I�k(t)'T(t)]P(t)=�(t)
(3.12)
where�(t)isanexponentialforgettingfactor.
Itisthenpossibletomakeadirectadaptiveextremumcontrollerforthe
processdiscussedinthischapter.Theestimatedparametersmaythenbe
usedinthecontrollaw(3.6)insteadofthetrueparametervalues
u(t)=�
^ � B1(t)
2^ � B2(t)
(3.13)
where�^ � B1(t)=2^ � B2(t)isthecurrentestimatedvalueoftheoptimalinput.
Thisleadstoacertaintyequivalencecontroller.
3.1.4
Theadaptiveextremum
controlalgorithm
Theon-lineparameterestimatorcombinedwithon-lineextremumcontroller
leadstoanadaptiveextremumcontrollerwhichcanbesummarizedas
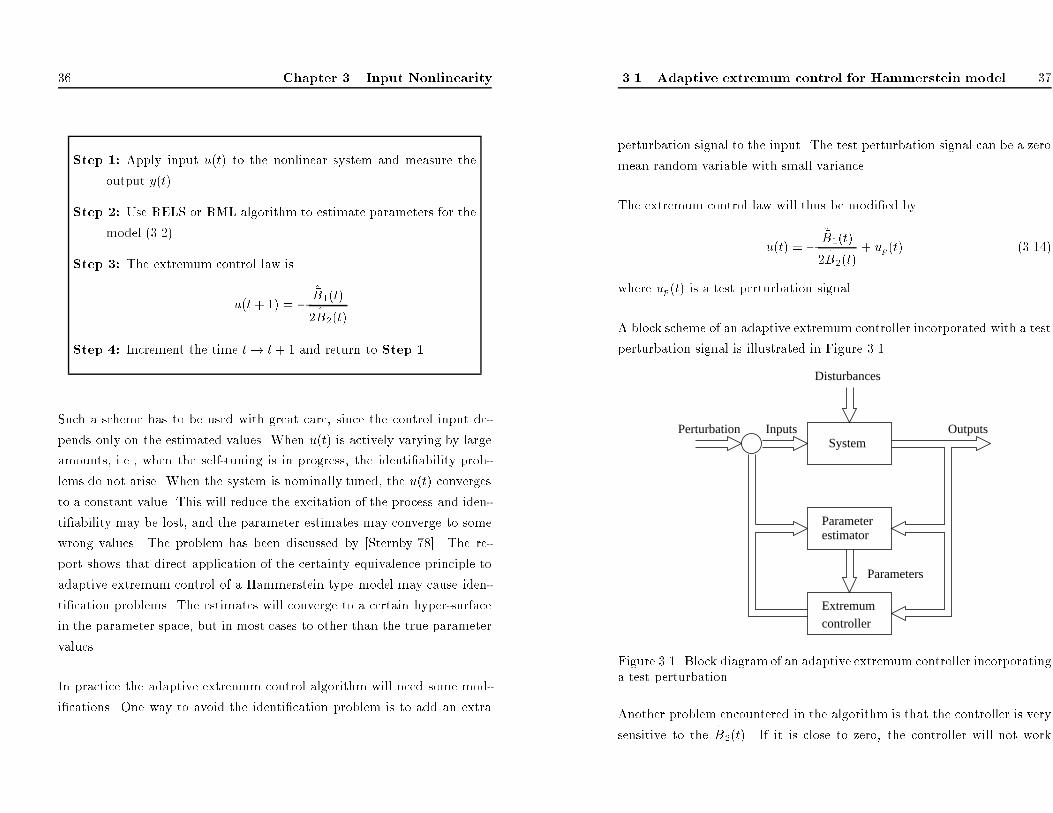
36 Chapter 3. Input Nonlinearity
Step 1: Apply input u(t) to the nonlinear system and measure the
output y(t).
Step 2: Use RELS or RML algorithm to estimate parameters for the
model (3.2).
Step 3: The extremum control law is
u(t+ 1) = �^�B1(t)
2 ^�B2(t)
Step 4: Increment the time t! t+ 1 and return to Step 1.
Such a scheme has to be used with great care, since the control input de-
pends only on the estimated values. When u(t) is actively varying by large
amounts, i.e., when the self-tuning is in progress, the identi�ability prob-
lems do not arise. When the system is nominally tuned, the u(t) converges
to a constant value. This will reduce the excitation of the process and iden-
ti�ability may be lost, and the parameter estimates may converge to some
wrong values. The problem has been discussed by [Sternby 78]. The re-
port shows that direct application of the certainty equivalence principle to
adaptive extremum control of a Hammerstein type model may cause iden-
ti�cation problems. The estimates will converge to a certain hyper-surface
in the parameter space, but in most cases to other than the true parameter
values.
In practice the adaptive extremum control algorithm will need some mod-
i�cations. One way to avoid the identi�cation problem is to add an extra
3.1 Adaptive extremum control for Hammerstein model 37
perturbation signal to the input. The test perturbation signal can be a zero
mean random variable with small variance.
The extremum control law will thus be modi�ed by
u(t) = �^�B1(t)
2 ^�B2(t)+ up(t) (3.14)
where up(t) is a test perturbation signal.
A block scheme of an adaptive extremum controller incorporated with a test
perturbation signal is illustrated in Figure 3.1.
Inputs
Parameterestimator
Extremumcontroller
System
Disturbances
Parameters
OutputsPerturbationFigure 3.1. Block diagramof an adaptive extremum controller incorporating
a test perturbation
Another problem encountered in the algorithm is that the controller is very
sensitive to the ^�B2(t). If it is close to zero, the controller will not work
38
Chapter3.InputNonlinearity
well.Actuallyinmostextremumapplicationtherewillbesomeknowledge
oftheboundsontheparameters.Theboundscanbeusedtoconstrain
theextremumcontrolleractioninoneoftwoways.Eithertheestimated
parameterscanbecheckedagainstknownboundsandconstrainedifnec-
essary,ortheextremumcontrolactioncanbecheckedagainstboundsand
constrainedappropriately.Anotherupdatingformulabasedonstochastic
approximationisgivenby[Sternby78]
u(t+1)=u(t)� (t)[^ � B1(t)+2^ � B2(t)u(t)]
(3.15)
where (t)canbe
(t)=
1 t
(3.16)
or
(t+1)�1= (t)�1+2^ � B2(t+1)
(3.17)
as[KeviczkyandHaber74]suggested.Inserting(3.13)into(3.15)gives
u(t+1)=u(t),andsoitseemsreasonabletobelievethat(3.13)and(3.15)
willbehavesimilarlyiftheestimatesconverge.
Sinceparameterb 0isnotincludedintheextremumcontrollaw,itisthen
notnecessarytoestimateit.Anincrementalformofthemodel(3.2)can
beusedtoeliminatetheconstantcoe�cientb 0,butonlyifthemodel(3.2)
canbemodi�edby
A(q�1)y(t)=b 0+B1(q�1)u(t�d)+B2(q�1)u
2(t�d)+C(q�1)e
(t)
�
(3.18)
whereweassumethatnoisee(t)isadriftdisturbance,and(�
=
1�
q�1)operatorisanintegralactiontocancelthee�ectofthestepoutput
disturbances,e(t)=�
canthenbeconsideredasawhitenoisewithzero
mean.Theinnovationformisthusgivenby
A(q�1)�y(t)=B1(q�1)�u(t�d)+B2(q�1)�u2(t�d)+C(q�1)e(t)(3.19)
3.2
Casestudies
39
where
�y(t)
=
y(t)�y(t�1)
�u(t)
=
u(t)�u(t�1)
�u2(t)
=
u2(t)�u2(t�1)
(3.20)
3.2
Casestudies
Inthissectionthebehaviourofadaptiveextremumcontrolalgorithmdis-
cussedinabovesectionwillbeinvestigatedbysomesimulationexamples.
Example3.1Anonlinearstaticsystem
Itisassumedthatthemodelstructureoftheprocessisknownandanon-
linearstaticsystemisconsideredinthisexample
y(t)=b 0+b 1u(t)+b 2u2(t)+e(t)
(3.21)
Thiscorrespondstoaprocesswithinputnonlinearitywhichisapproximated
byasecondorderpolynomial.Theparametersoftheprocessareb 0=100,
b 1=
2andb 2=
�0:01.Further,e(t)isazeromeanwhitenoisewith
variance1.Themaximumattainablevalueoftheoutputisy�=200,and
optimalinputvalueisu�=100.
Ifitisassumedthattheparametersofthemodelareunknown,thenthey
havetobeestimated.Thelinearregressionusedinestimationis
y(t)='T(t)^ �+�(t)
(3.22)

40
Chapter3.InputNonlinearity
wheretheregressionvectorandparametervectorare
'(t)
=
[1;u(t);u2(t)]T
^ �
=
[^ b0;^ b 1;^ b 2]T
(3.23)
thentheRLSmethodcanbeusedtoestimatetheunknownparameters.
Theextremumcontrollawisthecurrentestimateoftheoptimalpointu�
incorporatedwithanextradisturbancesignalup(t)
u(t)=�
^ b 1(t)
2^ b2(t)
+up(t)
(3.24)
whereaPRBSsignalisselectedastheperturbationsignalup(t)whichen-
suresthepersistentexcitationoftheinputu(t).
010
2030
4050
6070
8090
100
50100
150
Sam
ples
th(1)
010
2030
4050
6070
8090
100
0102030
Sam
ples
th(2)
010
2030
4050
6070
8090
100
−1.
5
−1
−0.
50
Sam
ples
th(3)
Figure3.2.Theestimatedparameters.
3.2
Casestudies
41
010
2030
4050
6070
8090
100
050100
150
Sam
ples
input u(t)
010
2030
4050
6070
8090
100
100
120
140
160
180
200
220
Sam
ples
output y(t) Figure3.3.Thesysteminputandoutput.
TheestimatedparametersareshowninFigure3.2,whereth(1)=
^ b 0,
th(2)=^ b 1andth(3)=^ b 2.Sinceitisassumedtoknowthattheprocess
hasamaximumpoint,theHessianmatrixmustthenbenegativede�nite,
i.e.,^ b 2<0.Thereforetheinitialvalueof^ b 2canbesettoanegativevalue.
TheinputandoutputofthesystemareshowninFigure3.3.
Thesimulationshowsthattheestimatedparametersconvergeveryfasttothe
truevalues.Theextremumcontrollerachievestheoptimalvalueofy�=200
veryquicklyandholdsittherewithminorperturbationswhicharecausedby
thetestperturbationsignalup(t).
3

42
Chapter3.InputNonlinearity
Example3.2Anonlineardynamicsystem
Nowanonlineardynamicsystemisconsidered.Thesystemisassumedto
bedescribedbyasecond-orderHammersteinmodel
y(t)+ay(t�1)=b 0+b 1u(t�1)+b 2u2(t�1)+e(t)
(3.25)
withparametera=
�0:8,andparametersb 0,b 1andb 2havethesame
valuesasexample3.1.Forthisprocess,themaximumattainablevalueof
theprocessoutputisy�=1000andtheoptimalinputisu�=100.
Ifitalltheparametersoftheprocessareunknown,thentheestimation
algorithmhastobeimplemented.Thelinearregression(3.12)canbewritten
by
y(t)='T(t)^ �+�(t)
with
'(t)
=
[�y(t�1);1;u(t�1);u2(t�1)]T
^ �
=
[^a;^ b 0;^ b 1;^ b 2]T
(3.26)
Theextremum
controllawisderivedbymaximizingtheoutputofstatic
responseandtheresultingcontrollerhasthesamestructureasthecontroller
inexample3.1
u(t)=�
^ b 1(t)
2^ b2(t)
+up(t)
andup(t)isaPRBSsignal.
Figure3.4andFigure3.5givetheresultsofsimulation.Theestimated
parametersareshowninFigure3.4,whereth(1)=^a,th(2)=^ b 0,th(3)=^ b 1
andth(4)=
^ b 2.Itcanbeseenthattheestimatedparametersconverge
fast,whileoutputy(t)achievesthemaximum
valueafter20steps.This
3.2
Casestudies
43
isslowerthantheconvergencespeedofestimatedparameters.Theslower
convergencespeediscausedbythedynamicsinthesystem.Inshort,after
initialtransienttheadaptiveextremum
controllerbehavesaswellasthe
controllerinexample3.1.
050
100
−1
−0.
8
−0.
6
−0.
4
−0.
20
Sam
ples
th(1)
050
100
708090100
110
Sam
ples
th(2)
050
100
0510152025
Sam
ples
th(3)
050
100
−1.
5
−1
−0.
50
0.5
Sam
ples
th(4)
Figure3.4.Theestimatedparameters.
010
2030
4050
6070
8090
100
−5005010
0
150
Input u(t)
010
2030
4050
6070
8090
100
0
200
400
600
800
1000
1200
Output y(t)
Sam
ples
Figure3.5.Thesysteminputsandoutputs.
3
44
Chapter3.InputNonlinearity
3.3
Convergenceanalysis
Theconvergencepropertiesoftheextremumcontrollercanbeanalysedby
theOrdinaryDi�erentialEquation(ODE)approachofLjung
[Ljung77].
AbriefsummaryoftheapproachisgiveninAppendixB.
Considerasystem
S:y(t)='T(t)�0+e(t)
(3.27)
andamodelforthesystemis M
:y(t)='T(t)�
(3.28)
theRLSestimatorcanberewrittenas
^ �(t)=^ �(t�1)+P(t)'(t)(y(t)�'T(t)^ �(t�1))
P(t+1)�1=P(t)�1+'(t)'T(t)
(3.29)
Fortheanalysispurposes,wewillintroducethematrixR(t)
R(t)=
1 tP(t)�1
(3.30)
thestandardformofRLSwillthenbetakenas
^ �(t)
=
^ �(t�1)+1 tR(t)�1'(t)[y(t)�'T(t)^ �(t�1)]
R(t)
=
R(t�1)+1 t['(t)'T(t)�R(t�1)]
(3.31)
InordertoformtheODE,�x^ �(t)atsomenominalvalue�andperform
theoperations
f(�)=
limt!1Ef'(t)[y(t)�'T(t)�]g
G(�;R)=
limt!1E['(t)'T(t)�R]
(3.32)
3.3
Convergenceanalysis
45
andthecorrespondingODEisthengivenby
d�
d�
=R�1f(�)
dR d
�=G(�;R)
(3.33)
Ifitisassumedthate(t)inthesystem
isuncorrelatedwith'(t),i.e.,
E['(t)e(t)]=0,inserting(3.27)into(3.32),wehave
f(�)
=
G(�)(� 0��)
G(�;R)
=
G(�)�R
(3.34)
where
G(�)=
limt!1E['(t)'T(t)]
(3.35)
isasymmetricsemi-positivede�nitematrix.
Itcanbeprovedthatif^ �(t)!��andR!R� ,thelocalconvergencepoint
willthensatisfy
f(�� )=
G(�� )(�0���)=0
R�=
G(�� )
(3.36)
IfG(�� )ispositivede�nitematrix,i.e.,
limt!1E['(t)'T(t)]>0
(3.37)
Thisimpliesthat��=
� 0.Thepositivede�niteG(�� )isageneralized
persistentexcitationcondition.Iftheconditionholds,
H(�� )=(R� )�1d d
�f(�)j �=�0
=�I
(3.38)
allofwhoseeigenvaluesareat-1inthelefthalf-plane.Thus,the� 0isthe
onlyconvergencepointunderthepersistentexcitationcondition.
Inadaptiveextremumcontrolalgorithms,Thepersistentlyexcitingofinput
signalisensuredbyadditionofthetestperturbationsignal.
46
Chapter3.InputNonlinearity
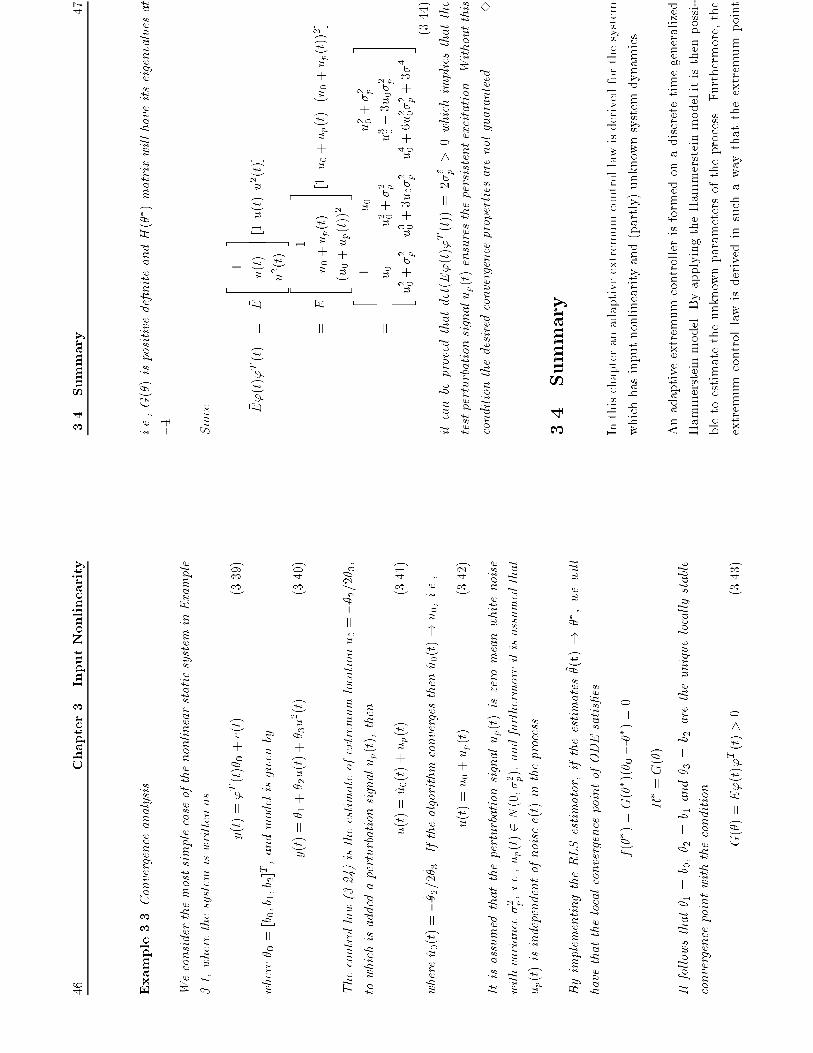
Example3.3Convergenceanalysis
WeconsiderthemostsimplecaseofthenonlinearstaticsysteminExample
3.1,wherethesystemiswrittenas
y(t)='T(t)�0+e(t)
(3.39)
where� 0=[b0;b1;b2]T,andmodelisgivenby
y(t)=� 1+� 2u(t)+� 3u2(t)
(3.40)
Thecontrollaw(3.24)istheestimateofextremumlocationu0=��2=2�3,
towhichisaddedaperturbationsignalup(t),then
u(t)=^u0(t)+up(t)
(3.41)
where^u0(t)=�^ �2=2^ � 3.Ifthealgorithmconvergesthen^u0(t)!u0,i.e.,
u(t)=u0+up(t)
(3.42)
Itisassumedthattheperturbationsignalup(t)iszeromeanwhitenoise
withvariance�2 p,i.e.,up(t)2N(0;�2 p),andfurthermoreitisassumedthat
up(t)isindependentofnoisee(t)intheprocess.
ByimplementingtheRLSestimator,iftheestimates^ �(t)!��,wewill
havethatthelocalconvergencepointofODEsatis�es
f(�� )=G(�� )(�0���)=0
R�=G(�)
Itfollowsthat� 1=b 0,� 2=b 1and� 3=b 2aretheuniquelocallystable
convergencepointwiththecondition
G(�)=
� E'(t)'T(t)>0
(3.43)
3.4
Summary
47
i.e.,G(�)ispositivede�niteandH(�� )matrixwillhaveitseigenvaluesat
�1.
Since � E
'(t)'T(t)
=
� E2 6 6 41
u(t)
u2(t)
3 7 7 5[1u(t)u2(t)]
=
� E2 6 6 41
u0+up(t)
(u0+up(t))2
3 7 7 5[1u0+up(t)(u0+up(t))2]
=
2 6 6 41
u0
u2 0+�2 p
u0
u2 0+�2 p
u3 0+3u0�2 p
u2 0+�2 p
u3 0+3u0�2 p
u4 0+6u2 0�2 p+3�4
3 7 7 5 (3.44)
itcanbeprovedthatdet(� E'(t)'T(t))=2�6 p
>0whichimpliesthatthe
testperturbationsignalup(t)ensuresthepersistentexcitation.Withoutthis
conditionthedesiredconvergencepropertiesarenotguaranteed.
3
3.4
Summary
Inthischapteranadaptiveextremumcontrollawisderivedforthesystem
whichhasinputnonlinearityand(partly)unknownsystemdynamics.
Anadaptiveextremumcontrollerisformedonadiscretetimegeneralized
Hammersteinmodel.ByapplyingtheHammersteinmodelitisthenpossi-
bletoestimatetheunknownparametersoftheprocess.Furthermore,the
extremumcontrollawisderivedinsuchawaythattheextremum
point
48
Chapter3.InputNonlinearity
ofthestaticcharacteristicshouldbechosenineverystep.Theoptimal
controllerisgivenbythecurrentestimateofextremumlocationachieved
byanon-linerecursiveestimationalgorithm.Theidenti�cationproblemis
avoidedbyapplyingthepersistentlyexcitinginput.
Twosimulationexampleshavebeenpresentedtoillustratetheperformance
ofcontrollerandestimator.Thesimulationresultsshowthegoodcon-
vergencepropertiesoftheestimator,andprocessesachievetheextremum
valuesveryfast.Theconvergencepropertiesofthealgorithmhavebeen
analysedbyusingODEapproach.
Chapter4
OutputNonlinearity
Ifthemodelconsistsofadynamiclinearpartandstaticnonlinearpart,
andthelineardynamicsisfollowedbyanonlinearity,itiscalledoutput
nonlinearity.Maybeanoutputnonlinearityisingeneralmoreimportant
thananinputnonlinearityforagooddescriptionofanonlinearsystem.A
nonlinearityatoutputofalinearsystemismuchmoredi�culttohandle
thanoneatinput.Thecomplexityoftheproblemwillalsodependonwhich
ofthevariablesintheprocesscanbemeasured.
Themodelsoftheprocesswithoutputnonlinearityhavebeengivenin
chapter2.Basedonthemodels,anadaptiveextremumcontrollawwillbe
derivedinthischapter.Thentheproblemturnstotwocases:whetherthe
intermediatesignalbetweenthelinearandnonlinearpartcanbemeasured
ornot.Mostdi�cultieswillariseinthesituationwhentheintermediate
signalisnotmeasurable.Thereforewewillgivemoreattentiontothiscase.
49
50
Chapter4.OutputNonlinearity
Thischapterisorganizedasfollows.Theextremumcontrollawisderived
fortheprocesseswithoutputnonlinearityinsection
4.1.Section
4.2is
concernedwiththeadaptiveextremumcontrolofprocesswithoutputnon-
linearityandthemeasuredintermediatedsignal.Thecaseforunmeasured
intermediatesignalisdiscussedinsection
4.3wheretheEKFandRPEM
approachasparameterestimatorswillbeappliedtostate-spacemodels.A
summaryisgiveninsection4.4.
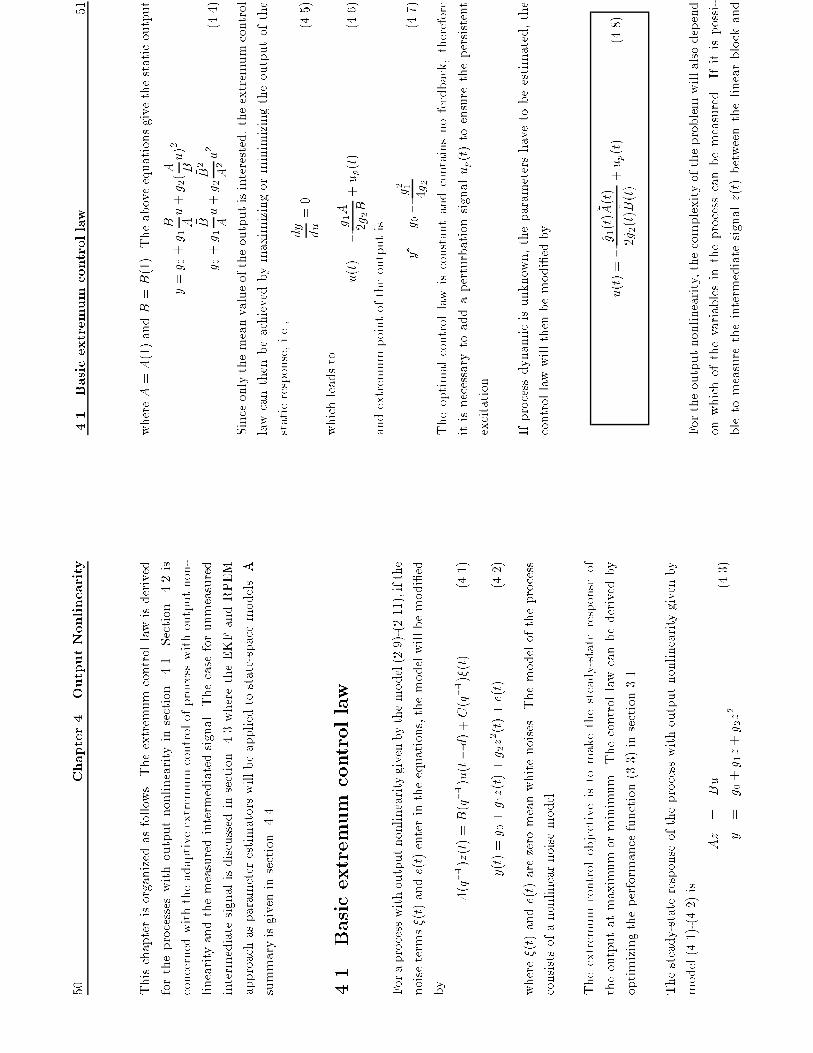
4.1
Basicextremum
controllaw
Foraprocesswithoutputnonlinearitygivenbythemodel(2.9)-(2.11),ifthe
noiseterms�(t)ande(t)enterintheequations,themodelwillbemodi�ed
by
A(q�1)z(t)=B(q�1)u(t�d)+C(q�1)�(t)
(4.1)
y(t)=g 0+g 1z(t)+g 2z2(t)+e(t)
(4.2)
where�(t)ande(t)arezeromeanwhitenoises.Themodeloftheprocess
consistsofanonlinearnoisemodel.
Theextremum
controlobjectiveistomakethesteady-stateresponseof
theoutputatmaximumorminimum.Thecontrollawcanbederivedby
optimizingtheperformancefunction(3.3)insection3.1.
Thesteady-stateresponseoftheprocesswithoutputnonlinearitygivenby
model(4.1)-(4.2)is
� Az
=
� Bu
y
=
g 0+g 1z+g 2z2
(4.3)
4.1
Basicextremum
controllaw
51
where� A=A(1)and� B=B(1).Theaboveequationsgivethestaticoutput
y=g 0+g 1
� B � Au+g 2(
� A � Bu)2
=g 0+g 1
� B � Au+g 2
� B2 � A
2u2
(4.4)
Sinceonlythemeanvalueoftheoutputisinterested,theextremumcontrol
lawcanthenbeachievedbymaximizingorminimizingtheoutputofthe
staticresponse,i.e.,
dy
du
=0
(4.5)
whichleadsto
u(t)=�
g 1� A
2g2� B+up(t)
(4.6)
andextremumpointoftheoutputis
y�=g 0�
g2 1
4g 2
(4.7)
Theoptimalcontrollawisconstantandcontainsnofeedback,therefore
itisnecessarytoaddaperturbationsignalup(t)toensurethepersistent
excitation.
Ifprocessdynamicisunknown,theparametershavetobeestimated,the
controllawwillthenbemodi�edby
u(t)=�
^g 1(t)^ � A(t)
2^g 2(t)^ � B(t)
+up(t)
(4.8)
Fortheoutputnonlinearity,thecomplexityoftheproblemwillalsodepend
onwhichofthevariablesintheprocesscanbemeasured.Ifitispossi-
bletomeasuretheintermediatesignalz(t)betweenthelinearblockand

52
Chapter4.OutputNonlinearity
nonlinearblock,whichisassumedbymostpeople,thecomplexitywillbe
signi�cantlysimpli�ed.However,moresearchisneededto�ndouthow
tohandlesystemswheretheintermediatesignalisnotavailable.Inthis
case,theproblemismoredi�culttohandle.Thesetwosituationswillbe
discussedseparatelyinthefollowingsections.
4.2
Theintermediatesignalismeasurable
[NavarroandZarrop95]hasgivenanadaptiveextremumcontrolalgorithm
byturningacontrollertooptimizeaperformancefunction
J(u)=Efy(t+d)2g
(4.9)
wherey(t)isprocessoutputgivenby
A(q�1)y(t)=q�1B(q�1)u(t)+e(t)
(4.10)
Inthispaperaperformancefunction(4.9)ratherthananinput-output
model(4.10)isestimated.Thisisactuallyaspecialcaseoftheprocesswith
outputnonlinearityandmeasurableintermediatesignal.Iftheproblemis
comparedtothemodel(4.1)-(4.2),y(t)in(4.10)canthusbeconsidered
asanintermediatesignal,andthemodelofthenonlinearblock(4.2)will
havetheparametersg 0=0,g 1=0,andg 2=1.
Sincetheintermediatesignalcanbemeasured,itisthenpossibletodothe
system
identi�cationforthelinearpartandnonlinearpartseparatelyin-
steadofestimatetheperformancefunction.Theadaptiveextremumcontrol
law(4.8)couldthenbeusedtokeeptheoutputoftheprocessaroundthe
estimatedpositionoftheextremum.
4.2
Theintermediatesignalismeasurable
53
TheRELSalgorithmhasalreadybeengivenin(3.12)inChapter3.The
modeloflinearpartusedinparameterestimationiswrittenasalinear
regression
z(t)='T 1(t)�1+�(t)
(4.11)
with '
1(t)
=
[�z(t�1);����z(t�na);u(t�d);���u(t�d�nb);
�(t�1);���;�(t�nc)]T
� 1
=
[a1;���ana;b1;���;bnb;c1;���;c nc]T
(4.12)
Themodelofnonlinearpartis
y(t)='T 2(t)�2+�(t)
(4.13)
where
'2(t)
=
[1;z(t);z2(t)]T
� 2(t)
=
[g0;g 1;g 2]T
(4.14)
Iftheintermediatesignalbetweenthelinearpartandnonlinearpartcan
beknown,theonlydi�erencebetweentheoutputnonlinearityandinput
nonlinearityisthattheinputfortheprocesswithoutputnonlinearityisnot
determineddirectly,butthroughthelineardynamics.Somesimpleexam-
pleswillbegiventoshowthebehaviourofadaptiveextremumcontroller.
Theconvergencepropertiesofthealgorithmcanbeanalysedinthesame
wayasitisgiveninprevioussection.
Example4.1Anunknownnonlineardynamics
Considerasystemwithlinearpart
z(t)+az(t�1)=bu(t�1)+e 1(t)
(4.15)

54
Chapter4.OutputNonlinearity
andnonlinearpart
y(t)=g 0+g 1z(t)+g 2z2(t)+e 2(t)
(4.16)
wherea=�0:8,b=1,g 0=100,g 1=2andg 2=�0:01.Further,e 1(t)
ande 2(t)arezeromeanwhitenoisewithvariances�2 e1=12and�2 e2=0:12
respectively.Themaximumattainablevalueofthesystemoutputis200,the
correspondingoptimalinputis20.
Inthisexampleweassumethatthelineardynamicsoftheprocessisknown,
i.e.,parametersaandbareavailable.Onlyparametersg 0,g 1andg 2for
thenonlinearpartareunknown.Thereforewehavetoestimatethem.The
RLSmethodcandirectlybeusedtoestimatetheparameters.
Basedontheestimatedparameters,theextremumcontrollawisgivenby
u(t)=�
^g 1(t)(1+a)
2^g 2(t)b
+up(t)
(4.17)
whereup(t)isperturbationsignal.Theextremumcontrollawisdetermined
byboththelineardynamicsandnonlineardynamics.Theperturbationsig-
nalisactuallynotnecessaryinthiscase,sincethenoiseontheintermediate
signale 1(t)actsasaperturbationsignalandimprovestheidenti�ability.
TheestimatedparametersareshowninFigure4.1whereth(1)=^g 0,th(2)=
^g 1andth(3)=^g 2.Figure4.2givestheinputu(t),outputy(t)andinter-
mediatesignalz(t).Theestimatedparametersconvergetothetruevalue
veryfast.Theoutputachievesthemaximumvalueafter20sec.Simulation
showsgoodconvergencepropertyofadoptiveextremumcontrolalgorithm.
4.2
Theintermediatesignalismeasurable
55
010
2030
4050
6070
8090
100
406080100
th(1)
010
2030
4050
6070
8090
100
0510 th(2)
010
2030
4050
6070
8090
100
−0.
4
−0.
20
th(3)
Sam
ples
Figure4.1.Theestimatedparameters.
010
2030
4050
6070
8090
100
01020 Input u(t)
010
2030
4050
6070
8090
100
050100
150
Intermediate signal z(t)
010
2030
4050
6070
8090
100
100
200
300
Output y(t)
Sam
ples
Figure4.2.Input,outputandintermediatesignal
3

56
Chapter4.OutputNonlinearity
Example4.2Bothlineardynamicsandnonlineardynamicsareunknown
Considertheprocessinexample4.1,ifweassumethatbothparametersin
linearpartandnonlinearpartareunknown,theidenti�cationforlinear
dynamicsandnonlineardynamicswillthenbeimplementedseparately.
Themodelusedtoestimateparametersinlinearpartcanbewrittenin
regressionform(4.11)-(4.12),theregressionvectorandparametervector
are
'1(t)=[�z(t�1);u(t�1)]T
^ � 1=[^a;^ b]T
andthemodelusedtoestimateparametersinnonlinearpartisgivenin
(4.13)-(4.14).
Theextremumcontrollawisidenticalinformwithexample4.1,however
parametersaandbarereplacedbyestimatedvalues
u(t)=�
^g 1(t)(1+^a(t))
2^g 2(t)^ b(t)
+up(t)
(4.18)
wheretheperturbationsignalup(t)isPRBSsignalwhichwillensurethe
identi�abilityofparameter� 1.Thenoisesignalontheintermediatesignal
e 1(t)willensuretheidenti�abilityofparameter� 2.
SimulationsareshowninFigure4.3-Figure4.5.Theestimatedparame-
tersinlinearpartaregiveninFigure4.3whereth1(1)=^aandth1(2)=^ b.
TheestimatedparametersinnonlinearpartaregivenFigure4.4where
th2(1)=
^g 0,th2(2)=
^g 1andth2(3)=
^g 3.Theinputu(t),outputy(t)
andintermediatesignalz(t)aregiveninFigure4.5.
4.2
Theintermediatesignalismeasurable
57
010
2030
4050
6070
8090
100
−1
−0.
50
Sam
ples
th1(1)
010
2030
4050
6070
8090
100
0.51
1.52
2.53
Sam
ples
th1(2)
Figure4.3.Theestimatedparameters.
010
2030
4050
6070
8090
100
8090100
Sam
ples
th2(1)
010
2030
4050
6070
8090
100
0510
Sam
ples
th2(2)
010
2030
4050
6070
8090
100
−0.
50
Sam
ples
th2(3)
Figure4.4.Theestimatedparameters.
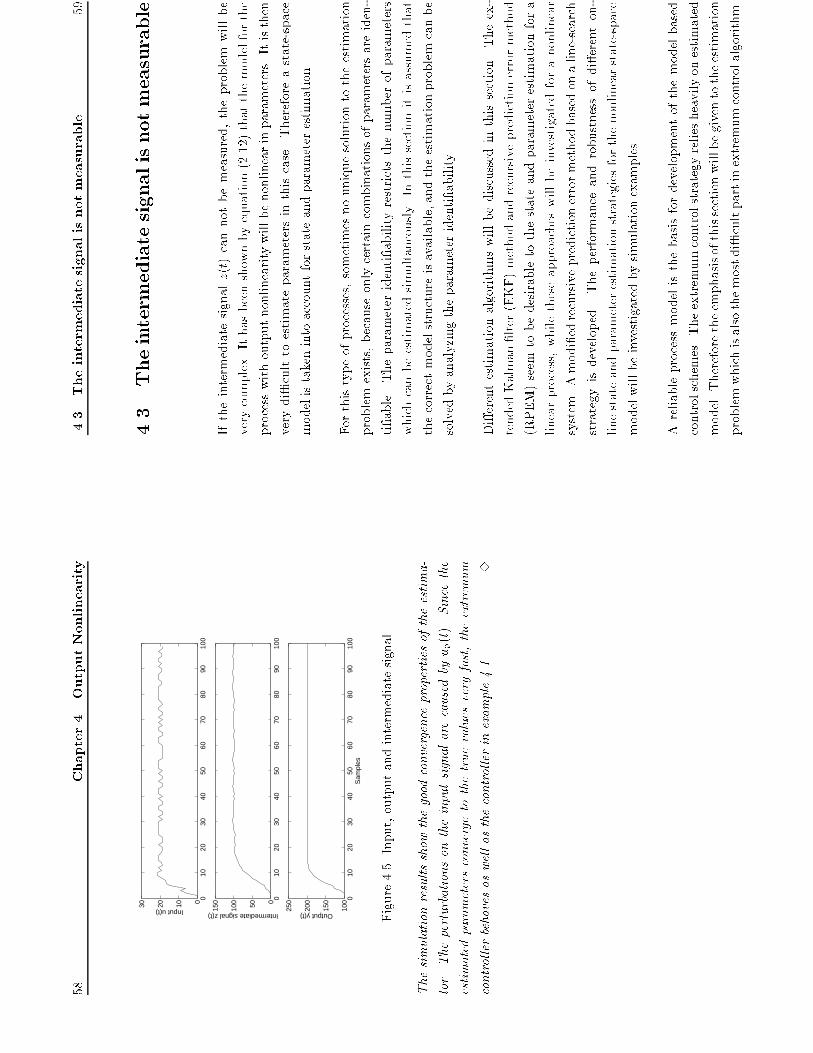
58
Chapter4.OutputNonlinearity
010
2030
4050
6070
8090
100
0102030 Input u(t)
010
2030
4050
6070
8090
100
050100
150
Intermediate signal z(t)
010
2030
4050
6070
8090
100
100
150
200
250
Output y(t)
Sam
ples
Figure4.5.Input,outputandintermediatesignal
Thesimulationresultsshowthegoodconvergencepropertiesoftheestima-
tor.Theperturbationsontheinputsignalarecausedbyup(t).Sincethe
estimatedparametersconvergetothetruevaluesveryfast,theextremum
controllerbehavesaswellasthecontrollerinexample4.1.
3
4.3
Theintermediatesignalisnotmeasurable
59
4.3
Theintermediatesignalisnotmeasurable
Iftheintermediatesignalz(t)cannotbemeasured,theproblemwillbe
verycomplex.Ithasbeenshownbyequation(2.12)thatthemodelforthe
processwithoutputnonlinearitywillbenonlinearinparameters.Itisthen
verydi�culttoestimateparametersinthiscase.Thereforeastate-space
modelistakenintoaccountforstateandparameterestimation.
Forthistypeofprocesses,sometimesnouniquesolutiontotheestimation
problemexists,becauseonlycertaincombinationsofparametersareiden-
ti�able.Theparameteridenti�abilityrestrictsthenumberofparameters
whichcanbeestimatedsimultaneously.Inthissectionitisassumedthat
thecorrectmodelstructureisavailable,andtheestimationproblemcanbe
solvedbyanalyzingtheparameteridenti�ability.
Di�erentestimationalgorithmswillbediscussedinthissection.Theex-
tendedKalman�lter(EKF)methodandrecursivepredictionerrormethod
(RPEM)seemtobedesirabletothestateandparameterestimationfora
linearprocess,whiletheseapproacheswillbeinvestigatedforanonlinear
system.Amodi�edrecursivepredictionerrormethodbasedonaline-search
strategyisdeveloped.Theperformanceandrobustnessofdi�erenton-
linestateandparameterestimationstrategiesforthenonlinearstate-space
modelwillbeinvestigatedbysimulationexamples.
Areliableprocessmodelisthebasisfordevelopmentofthemodelbased
controlschemes.Theextremumcontrolstrategyreliesheavilyonestimated
model.Thereforetheemphasisofthissectionwillbegiventotheestimation
problemwhichisalsothemostdi�cultpartinextremumcontrolalgorithm.
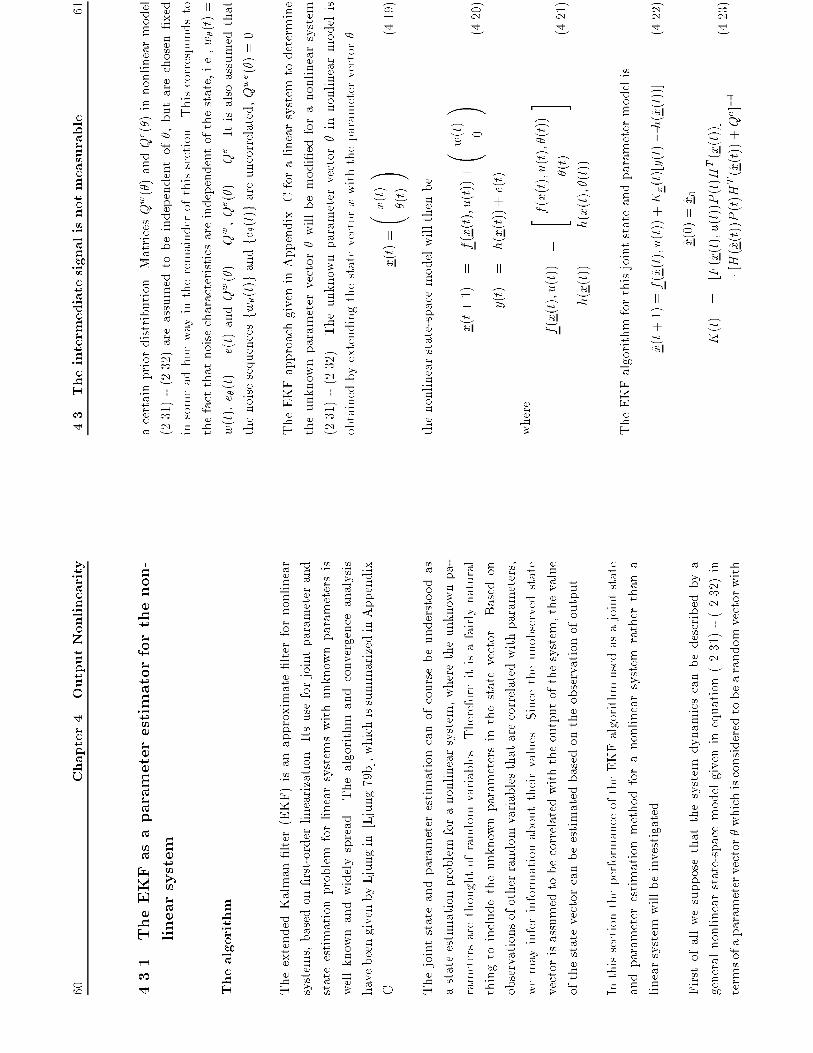
60
Chapter4.OutputNonlinearity
4.3.1
TheEKFasaparameterestimatorforthenon-
linearsystem
Thealgorithm
TheextendedKalman�lter(EKF)isanapproximate�lterfornonlinear
systems,basedon�rst-orderlinearization.Itsuseforjointparameterand
stateestimationproblem
forlinearsystemswithunknownparametersis
wellknownandwidelyspread.Thealgorithmandconvergenceanalysis
havebeengivenbyLjungin[Ljung79b],whichissummarizedinAppendix
C.
Thejointstateandparameterestimationcanofcoursebeunderstoodas
astateestimationproblemforanonlinearsystem,wheretheunknownpa-
rametersarethoughtofrandomvariables.Thereforeitisafairlynatural
thingtoincludetheunknownparametersinthestatevector.Basedon
observationsofotherrandomvariablesthatarecorrelatedwithparameters,
wemayinferinformationabouttheirvalues.Sincetheunobservedstate
vectorisassumedtobecorrelatedwiththeoutputofthesystem,thevalue
ofthestatevectorcanbeestimatedbasedontheobservationofoutput.
InthissectiontheperformanceoftheEKFalgorithmusedasajointstate
andparameterestimationmethodforanonlinearsystem
ratherthana
linearsystemwillbeinvestigated.
Firstofallwesupposethatthesystem
dynamicscanbedescribedbya
generalnonlinearstate-spacemodelgiveninequation(2.31)-(2.32)in
termsofaparametervector�whichisconsideredtobearandomvectorwith
4.3
Theintermediatesignalisnotmeasurable
61
acertainpriordistribution.MatricesQw(�)andQe(�)innonlinearmodel
(2.31)-(2.32)areassumedtobeindependentof�,butarechosen�xed
insomeadhocwayintheremainderofthissection.Thiscorrespondsto
thefactthatnoisecharacteristicsareindependentofthestate,i.e.,w�(t)=
w(t),e �(t)=e(t)andQw(�)=Qw,Qe(�)=Qe.Itisalsoassumedthat
thenoisesequencesfw�(t)gandfe�(t)gareuncorrelated,Qwe(�)=0.
TheEKFapproachgiveninAppendixCforalinearsystemtodetermine
theunknownparametervector�willbemodi�edforanonlinearsystem
(2.31)-(2.32).Theunknownparametervector�innonlinearmodelis
obtainedbyextendingthestatevectorxwiththeparametervector�
x(t)=
x(t)
�(t)
!
(4.19)
thenonlinearstate-spacemodelwillthenbe
x(t+1)
=
f(x(t);u(t))+
w(t)
0
!
y(t)
=
h(x(t))+e(t)
(4.20)
where
f(x(t);u(t))
=
" f(x(t);u(t);�(t))
�(t)
#
h(x(t))
=
h(x(t);�(t))
(4.21)
TheEKFalgorithmforthisjointstateandparametermodelis
^x(t+1)=f(^x(t);u(t))+Kx(t)[y(t)�h(^x(t))]
(4.22)
^x(0)=^x0
K(t)
=
[F(^x(t);u(t))� P(t)HT(^x(t))]
�[H(^x(t))� P(t)HT(^x(t))+Qe]�1
(4.23)

62
Chapter4.OutputNonlinearity
� P(t+1)
=
F(^x(t);u(t))� P(t)FT(^x(t);u(t))+� Qw
�K(t)[H(^x(t))� P(t)HT(^x(t))+Qe]KT(t)
(4.24)
� P(0)=
� P0
where
F(^x(t);u(t))
=
@ @xf(x;u)� � � x=^x(t)
=
" A(^ �(t))
M(^ �(t);^x(t);u(t))
0
I
#
(4.25)
H(^x(t))
=
@ @xh(x)� � � x=^x(t)
=
[C(^ �(t))D(^ �(t);^x(t))]
(4.26)
� Qw
=
" Qw
0
0
0#
(4.27)
^x0
=
" ^x0 ^ � 0
#
� P0
=
�(^ �0)
0
0
�0
!
(4.28)
and
A(^x(t);^ �(t))=
@ @x
f(x(t);u(t);^ �(t))� � � � x=^x
(t)
(anxjnx
matrix)
M(^x(t);u(t);^ �(t))=
@ @�
f(^x(t);u(t);�(t))� � � � �=^ �
(t)
(anxjn�
matrix)
C(^x(t);^ �(t))=
@ @x
h(x(t);^ �(t))� � � � x=^x
(t)
(anyjnx
matrix)
(4.29)
D(^x(t);^ �(t))=
@ @�
h(^x(t);�(t))� � � � �=^ �
(t)
(anyjn�
matrix)
4.3
Theintermediatesignalisnotmeasurable
63
ThealgorithmcanbeseparatedintotwostepsifwewritematrixKx(t)and
� Pas
Kx(t)=
" Kx(t)
K�(t)
#
� P(t)=
" P1(t)
P2(t)
PT 2(t)
P3(t)
#
Parameterscanthenbecomputedinaparameterestimator,andthere-
sultingmodelisusedinastateestimator.Thealgorithmissummarizedas
follows
^x(t+1)=f(^x(t);u(t);^ �(t))+Kx(t)[y(t)�h(^x(t);^ �(t))]
^x(0)=^x0
^ �(t+1)=^ �(t)+K�(t)[y(t)�h(^x(t);^ �(t))]
^ �(0)=^ � 0
Kx(t)=[AtP1(t)CT t
+MtP
T 2(t)CT t
+AtP2(t)DT t
+MtP3(t)DT t]S�1t
K�(t)=[PT 2(t)CT t
+P3(t)DT t]S�1t
(4.30)
St=CtP1(t)CT t
+CtP2(t)DT t
+DtPT 2(t)CT t
+DtP3(t)DT t
+Qe
P1(t+1)=AtP1(t)AT t+AtP2(t)MT t
+MtPT 2(t)AT t+MtP3(t)MT t
�Kx(t)StKT x(t)+Qw
P1(0)=�(^ �0)
P2(t+1)=AtP2(t)+MtP3(t)�Kx(t)StKT �(t)
P2(0)=0
P3(t+1)=P3(t)�K�(t)StKT �(t)
P3(0)=�0
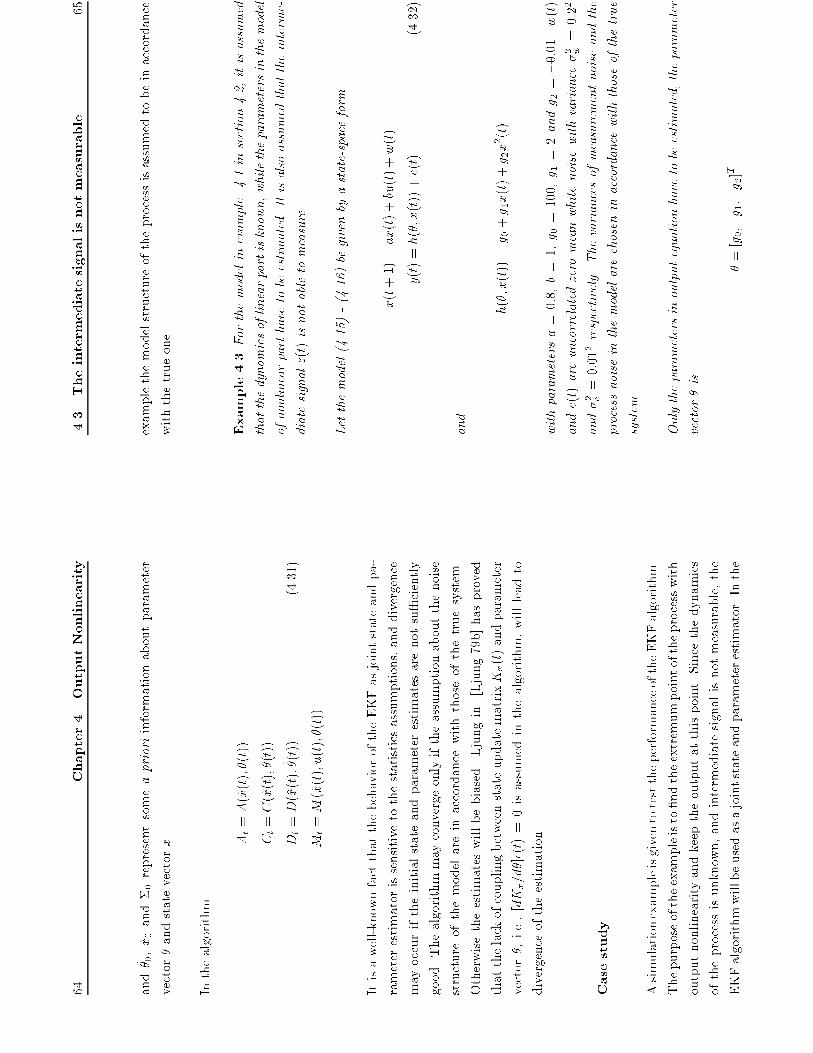
64
Chapter4.OutputNonlinearity
and^ � 0,^x0and�0representsomeaprioriinformationaboutparameter
vector�andstatevectorx.
Inthealgorithm
At=A(^x(t);^ �(t))
Ct=C(^x(t);^ �(t))
Dt=D(^x(t);^ �(t))
(4.31)
Mt=M(^x(t);u(t);^ �(t))
Itisawell-knownfactthatthebehavioroftheEKFasjointstateandpa-
rameterestimatorissensitivetothestatisticsassumptions,anddivergence
mayoccuriftheinitialstateandparameterestimatesarenotsu�ciently
good.Thealgorithmmayconvergeonlyiftheassumptionaboutthenoise
structureofthemodelareinaccordancewiththoseofthetruesystem.
Otherwisetheestimateswillbebiased.Ljungin
[Ljung79b]hasproved
thatthelackofcouplingbetweenstateupdatematrixKx(t)andparameter
vector�,i.e.,[dKx=d�]�(t)=0isassumedinthealgorithm,willleadto
divergenceoftheestimation.
Casestudy
AsimulationexampleisgiventotesttheperformanceoftheEKFalgorithm.
Thepurposeoftheexampleisto�ndtheextremumpointoftheprocesswith
outputnonlinearityandkeeptheoutputatthispoint.Sincethedynamics
oftheprocessisunknown,andintermediatesignalisnotmeasurable,the
EKFalgorithmwillbeusedasajointstateandparameterestimator.Inthe
4.3
Theintermediatesignalisnotmeasurable
65
examplethemodelstructureoftheprocessisassumedtobeinaccordance
withthetrueone.
Example4.3Forthemodelinexample4.1insection4.2,itisassumed
thatthedynamicsoflinearpartisknown,whiletheparametersinthemodel
ofnonlinearparthavetobeestimated.Itisalsoassumedthattheinterme-
diatesignalz(t)isnotabletomeasure.
Letthemodel(4.15)-(4.16)begivenbyastate-spaceform
x(t+1)=ax(t)+bu(t)+w(t)
y(t)=h(�;x(t))+e(t)
(4.32)
and
h(�;x(t))=g 0+g 1x(t)+g 2x2(t)
withparametersa=0:8,b=1,g 0=100,g 1=2andg 2=�0:01.w(t)
ande(t)areuncorrelatedzeromeanwhitenoisewithvariance�2 w
=0:22
and�2 e=0:012respectively.Thevariancesofmeasurementnoiseandthe
processnoiseinthemodelarechoseninaccordancewiththoseofthetrue
system.
Onlytheparametersinoutputequationhavetobeestimated,theparameter
vector�is
�=[g0;g 1;g 2]T
66
Chapter4.OutputNonlinearity
TheextendedKalman�lteralgorithm(4.30)-(4.31)isappliedonmodel
(4.32)with
At
=
a
Mt
=
[0;0;0]
Ct
=
^g 1(t)+2^g 2(t)^x(t)
Dt
=
[1;^x(t);^x2(t)]
(4.33)
Theresultingalgorithmwillbe
^x(t+1)=a^x(t)+bu(t)+Kx(t)[y(t)�h(^ �(t);^x(t))]
(4.34)
^x(0)=^x0
^ �(t+1)=^ �(t)+K�(t)[y(t)�h(^ �(t);^x(t))]
(4.35)
^ �(0)=^ � 0
where
h(^ �(t);^x(t))=^g 0(t)+^g 1(t)^x(t)+^g 2(t)^x2(t)
(4.36)
ThestateupdatematrixKx(t)andtheparameterupdatematrixK�willbe
computedbyapplyingalgorithm(4.30).
Theextremumcontrollawbasedontheestimatedmodelwillbe
u(t)=�
^g 1(t)(1+a)
2^g 2(t)b
SimulationresultsaregiveninFigure4.6-Figure4.7.Theestimated
parametersaregiveninFigure4.6,whereth(1)=
^g 0,th(2)=
^g 1and
th(3)=^g 2.simulationshowsthattheestimatedparametersconvergetothe
correctvalues,andsystem
outputachievestheextremum
valuebytuning
theextremumcontrollaw.
4.3
Theintermediatesignalisnotmeasurable
67
010
2030
4050
6070
8090
100
8090100
110
th(1)
010
2030
4050
6070
8090
100
0246 th(2)
010
2030
4050
6070
8090
100
−0.
20
th(3)
Sam
ples
Figure4.6.Theestimatedparameters.
010
2030
4050
6070
8090
100
0102030 u
010
2030
4050
6070
8090
100
050100
150
x and xhat
010
2030
4050
6070
8090
100
100
150
200
250
y
Sam
ples
Figure4.7.Theinputuandoutputy,statex(solid)andestimatedstate
^x(dashed).
68
Chapter4.OutputNonlinearity
Theconvergenceofestimationrequirestheconditionthattheinitialvalues
oftheestimatedparametersshouldbeinsideaconvergencearea(nottoo
farfromthetruevalues),andtheinitialvariancematrixoftheestimated
parametersP3(0)inthealgorithm(4.30)cannotbeassumedtoolargein
ordertoboundtheestimatedparametersat�rstseveralsteps,otherwise
theeigenvaluesofmatrixAt�KxCtwillbefarfromtheunitcircle.This
willcausethedivergenceoftheprocess.Goodinitialstateestimatesare
alsoimportantfortheconvergenceproperties.Theincreasednumberof
parameterstobeestimatedfrequentlyresultsinreducedrobustness.
TheEKFasajointstateandparameterestimatorworkswellwhenagood
modelandreasonableparameterestimatesareavailable,thenonlinearityis
weakandnoiseassumptionsareclosetothetruth.
Asitisstatedin
[Ljung79b],thereasonforthedivergenceoftheEKF
asajointparameterandstateestimationforalinearsystem
isthatthe
e�ectontheKalmangainKx
ofachangein�isnottakencareof.For
caseswherethesteady-stateKalmangaindoesnotdependon�,wewill
havegoodconvergenceproperties.Theestimationproblemissigni�cantly
simpli�edifthe�ltergainsensitivitiestotheparametersareneglected,i.e.,
[dKx=d�]�(t)=0.Theestimationproblemcanthenbeseparatedintotwo
estimators.Theparameterswerecomputedinaparameterestimator,and
resultingmodelisusedinastateestimator.
Foranonlinearsystemthealgorithmismoresensitive.Accordingtoequa-
tions(C.37)-(C.39)inAppendixC,thesteadystateKalmangainmatrix
ofalinearsystem
isindependentofstatevariableswhichappearonlyin
MtandDtmatrices.However,foranonlinearsystem,sincethestateup-
datematrixKx(t)inthealgorithm(4.30)iscalculatedbyusingalinearized
4.3
Theintermediatesignalisnotmeasurable
69
modelwhichisactuallyanapproximationofthetruemodel.Parametersof
thelinearizedmodeldependnotonlyontheestimatedparametersbutalso
ontheestimatedstates(e.g.,matrixCtin(4.33)).Thereforethesteady-
stateKalmangainmatrixofanonlinearsystemdependsonestimatedstate
vector.Thiswillcausethealgorithmmoresensitive.Themodelparam-
eterestimateswillbepoorwhentheestimatedstatesarenotclosetothe
truevalues.Thepoormodelparameterestimateswillmakethealgorithm
todiverge,since[dKx=d�]�(t)isnotaccountedforinthealgorithm,and
sensitivitymatrix (t)=�d=d��(t)hasatendencytobeincorrect.
3
4.3.2
TheRPEM
appliedtotheinnovationsmodel
Itisofcourseunrealistictoassumethatthenoisestructureisknown,while
thedynamicsareunknown.Therefore,ifthenoisecharacteristicofthe
modelischosenadhoc,thenthesystemparameterestimateswillingeneral
bebiased[Ljung79b].LjungsuggestedaNewton-typestochasticgradient
algorithminhisreport.
ArecursiveGauss-Newtonalgorithmwhichminimizespredictionerrorcri-
terionwillleadtoarecursivepredictionerrormethod(RPEM).TheRPEM
istakeintoconsideration,sinceLjunghasprovedthattheRPEMappliedto
thejointstateandparameterestimationprobleminastationaryinnovations
state-spacemodelhasbetterconvergencepropertiesthanthecorrespond-
ingEKF.ThecouplingbetweenupdatestatematrixKx(t)andparameter
vector�isincludedintheRPEMalgorithm.
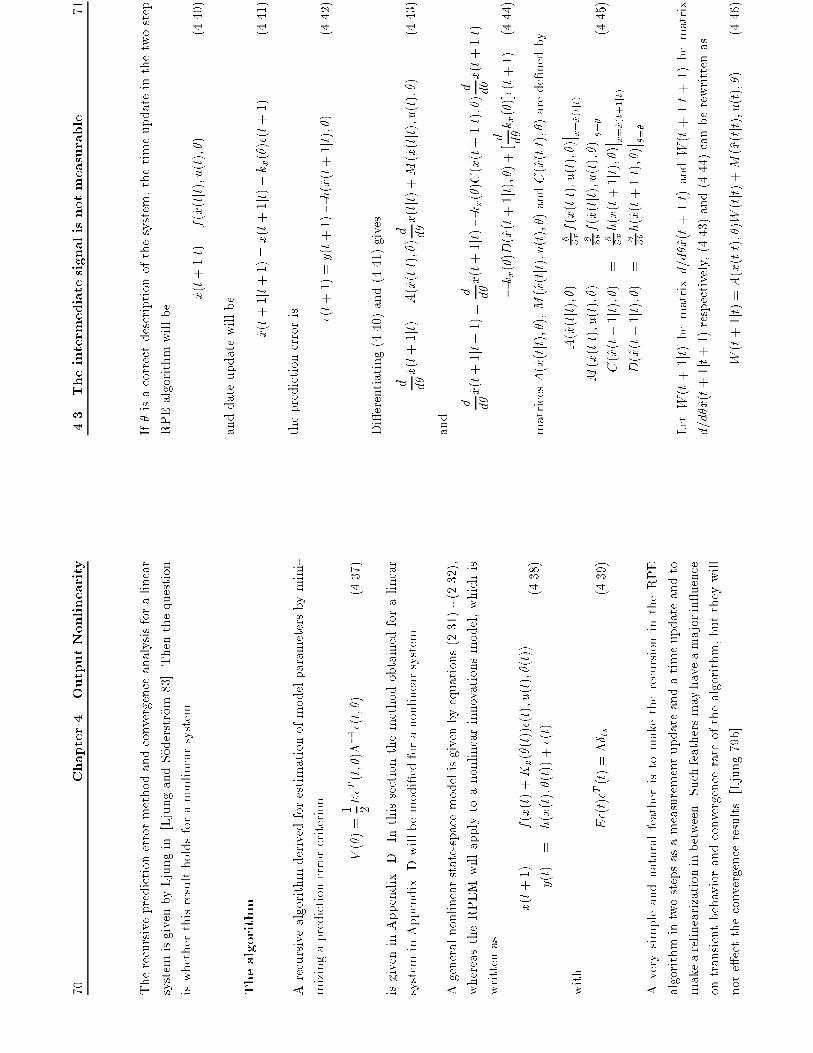
70
Chapter4.OutputNonlinearity
Therecursivepredictionerrormethodandconvergenceanalysisforalinear
systemisgivenbyLjungin[LjungandS�oderstr�om83].Thenthequestion
iswhetherthisresultholdsforanonlinearsystem.
Thealgorithm
Arecursivealgorithmderivedforestimationofmodelparametersbymini-
mizingapredictionerrorcriterion
V(�)=
1 2E�T(t;�)��1�(t;�)
(4.37)
isgiveninAppendix
D.Inthissectionthemethodobtainedforalinear
systeminAppendixDwillbemodi�edforanonlinearsystem.
Ageneralnonlinearstate-spacemodelisgivenbyequations(2.31)-(2.32),
whereastheRPEM
willapplytoanonlinearinnovationsmodel,whichis
writtenas
x(t+1)
=
f(x(t)+Kx(�(t))�(t);u(t);�(t))
y(t)
=
h(x(t);�(t))+�(t)
(4.38)
with
E�(t)�T(t)=�� ts
(4.39)
AverysimpleandnaturalfeatheristomaketherecursionintheRPE
algorithmintwostepsasameasurementupdateandatimeupdateandto
makearelinearizationinbetween.Suchfeathersmayhaveamajorin uence
ontransientbehaviorandconvergencerateofthealgorithm,buttheywill
note�ecttheconvergenceresults[Ljung79b].
4.3
Theintermediatesignalisnotmeasurable
71
If�isacorrectdescriptionofthesystem,thetimeupdateinthetwostep
RPEalgorithmwillbe
^x(t+1jt)=f(^x(tjt);u(t);�)
(4.40)
anddateupdatewillbe
^x(t+1jt+1)=^x(t+1jt)+kx(�)�(t+1)
(4.41)
thepredictionerroris �(
t+1)=y(t+1)�h(^x(t+1jt);�)
(4.42)
Di�erentiating(4.40)and(4.41)gives
d d�
^x(t+1jt)=A(^x(tjt);�)
d d�
^x(tjt)+M(^x(tjt);u(t);�)
(4.43)
and
d d�
^x(t+1jt+1)=
d d�
^x(t+1jt)�kx(�)C(^x(t+1jt);�)
d d�
^x(t+1jt)
�kx(�)D(^x(t+1jt);�)+[
d d�
kx(�)]�(t+1)
(4.44)
matricesA(^x(tjt);�),M(^x(tjt);u(t);�)andC(^x(tjt);�)arede�nedby
A(^x(tjt);�)
=
@ @xf(x(tjt);u(t);�)
� � x=^x(tjt)
M(^x(tjt);u(t);�)
=
@ @�f(^x(tjt);u(t);�)
� � �=�
C(^x(t+1jt);�)
=
@ @xh(x(t+1jt);�)
� � x=^x(t+1jt)
D(^x(t+1jt);�)
=
@ @�h(^x(t+1jt);�)
� � �=�
(4.45)
LetW(t+1jt)bematrixd=d�^x(t+1jt)andW(t+1jt+1)bematrix
d=d�^x(t+1jt+1)respectively,(4.43)and(4.44)canberewrittenas
W(t+1jt)=A(^x(tjt);�)W(tjt)+M(^x(tjt);u(t);�)
(4.46)
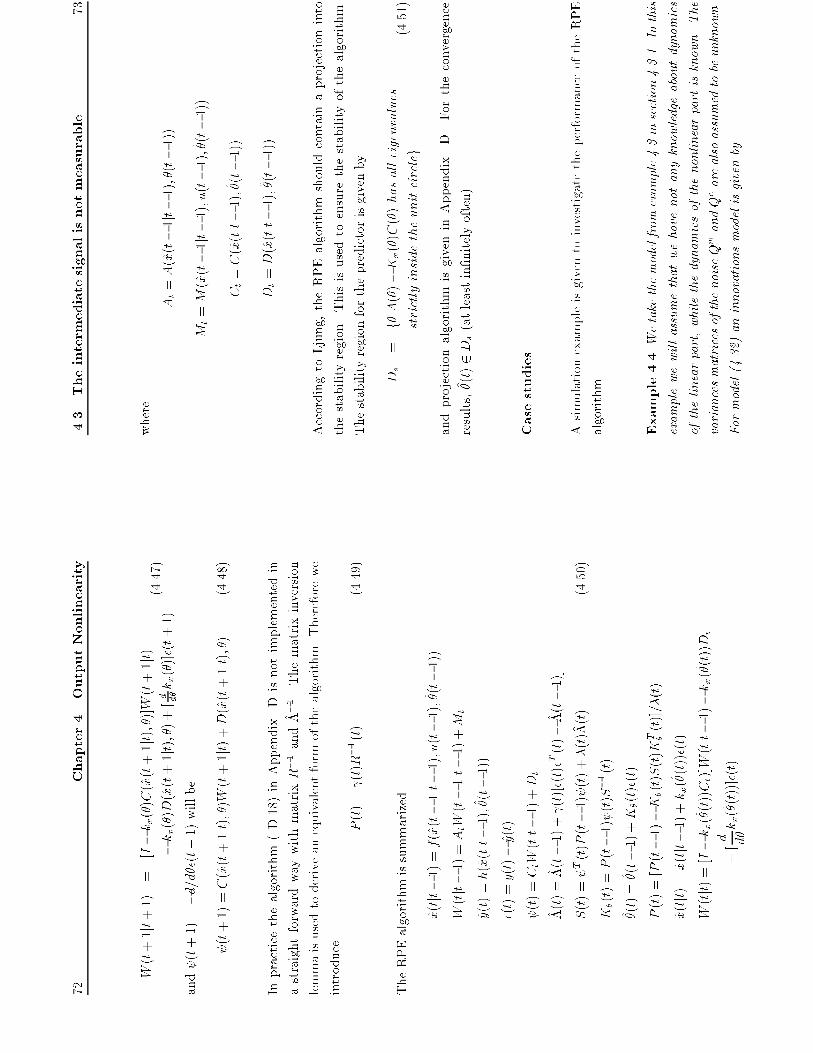
72
Chapter4.OutputNonlinearity
W(t+1jt+1)
=
[I�kx(�)C(^x(t+1jt);�)]W(t+1jt)
�kx(�)D(^x(t+1jt);�)+[d d�kx(�)]�(t+1)
(4.47)
and (t+1)=�d=d��(t+1)willbe
(t+1)=C(^x(t+1jt);�)W(t+1jt)+D(^x(t+1jt);�)
(4.48)
Inpracticethealgorithm(D.18)inAppendix
Disnotimplementedin
astraightforwardwaywithmatrixR�1and^ ��1.Thematrixinversion
lemmaisusedtoderiveanequivalentformofthealgorithm.Thereforewe
introduce
P(t)= (t)R�1(t)
(4.49)
TheRPEalgorithmissummarized
^x(tjt�1)=f(^x(t�1jt�1);u(t�1);^ �(t�1))
W(tjt�1)=AtW(t�1jt�1)+Mt
^y(t)=h(^x(tjt�1);^ �(t�1))
�(t)=y(t)�^y(t)
(t)=CtW(tjt�1)+Dt
^ �(t)=^ �(t�1)+ (t)[�(t)�T(t)�^ �(t�1)]
S(t)= T(t)P(t�1) (t)+�(t)^ �(t)
(4.50)
K�(t)=P(t�1) (t)S�1(t)
^ �(t)=^ �(t�1)+K�(t)�(t)
P(t)=[P(t�1)�K�(t)S(t)KT �(t)]=�(t)
^x(tjt)=^x(tjt�1)+kx(^ �(t))�(t)
W(tjt)=[I�kx(^ �(t))Ct)]W(tjt�1)�kx(^ �(t))Dt
+[
d d�
kx(^ �(t))]�(t)
4.3
Theintermediatesignalisnotmeasurable
73
where
At=A(^x(t�1jt�1);^ �(t�1))
Mt=M(^x(t�1jt�1);u(t�1);^ �(t�1))
Ct=C(^x(tjt�1);^ �(t�1))
Dt=D(^x(tjt�1);^ �(t�1))
AccordingtoLjung,theRPEalgorithmshouldcontainaprojectioninto
thestabilityregion.Thisisusedtoensurethestabilityofthealgorithm.
Thestabilityregionforthepredictorisgivenby
Ds
=
f�jA(�)�Kx(�)C(�)hasalleigenvalues
strictlyinsidetheunitcircleg
(4.51)
andprojectionalgorithmisgiveninAppendix
D.Fortheconvergence
results,^ �(t)2Ds(atleastin�nitelyoften).
Casestudies
AsimulationexampleisgiventoinvestigatetheperformanceoftheRPE
algorithm.
Example4.4Wetakethemodelfromexample4.3insection4.3.1.Inthis
examplewewillassumethatwehavenotanyknowledgeaboutdynamics
ofthelinearpart,whilethedynamicsofthenonlinearpartisknown.The
variancesmatricesofthenoiseQw
andQearealsoassumedtobeunknown.
Formodel(4.32)aninnovationsmodelisgivenby

74
Chapter4.OutputNonlinearity
x(t+1)
=
ax(t)+bu(t)+Kx�(t)
y(t)
=
h(t;x(t))+e(t)
(4.52)
where
h(t;x(t))=g 0+g 1x(t)+g 2x2(t)
Theestimatedparametervector�willbe
�=[a;b;kx]T
ThetwostepRPEM
(4.50)willbeimplementedfortheinnovationsmodel
with
At=^a(t�1)
Ct=g 1+2g 2^x(tjt�1)
Dt=[0;0;0]
Mt=[^x(t�1jt�1);u(t�1);0]
Theextremumcontrollawbasedontheestimatedmodelis
u(t)=�
g 1(1+^a)
2g 2^ b
ThesimulationresultsaregiveninFigure4.8-4.9.Theestimatedparam-
etersareshowninFigure4.8,whereth(1)=^a,th(2)=^ bandth(3)=
^ kx.
Thetruevaluesofparametersaandbaregivenbythedashedlineinthe
�gure.Theestimatesconvergetothecorrectvaluesveryfast.Theinput,
outputandstatearegiveninFigure4.9.Theoutputachievestheextremum
valuequickly.Thealgorithmshowsasatisfactoryperformance.
4.3
Theintermediatesignalisnotmeasurable
75
010
2030
4050
6070
8090
100
0.6
0.8
th(1)
010
2030
4050
6070
8090
100
1th(2)
010
2030
4050
6070
8090
100
1.1
1.151.
2
th(3)
Sam
ples
Figure4.8.Theestimatedparameters.
010
2030
4050
6070
8090
100
0204060 u
010
2030
4050
6070
8090
100
050100
150
x and xhat
010
2030
4050
6070
8090
100
0
100
200
300
y
Sam
ples
Figure4.9.Theinputuandoutputy,statex(solid)andestimatedstate
^x(dashed)
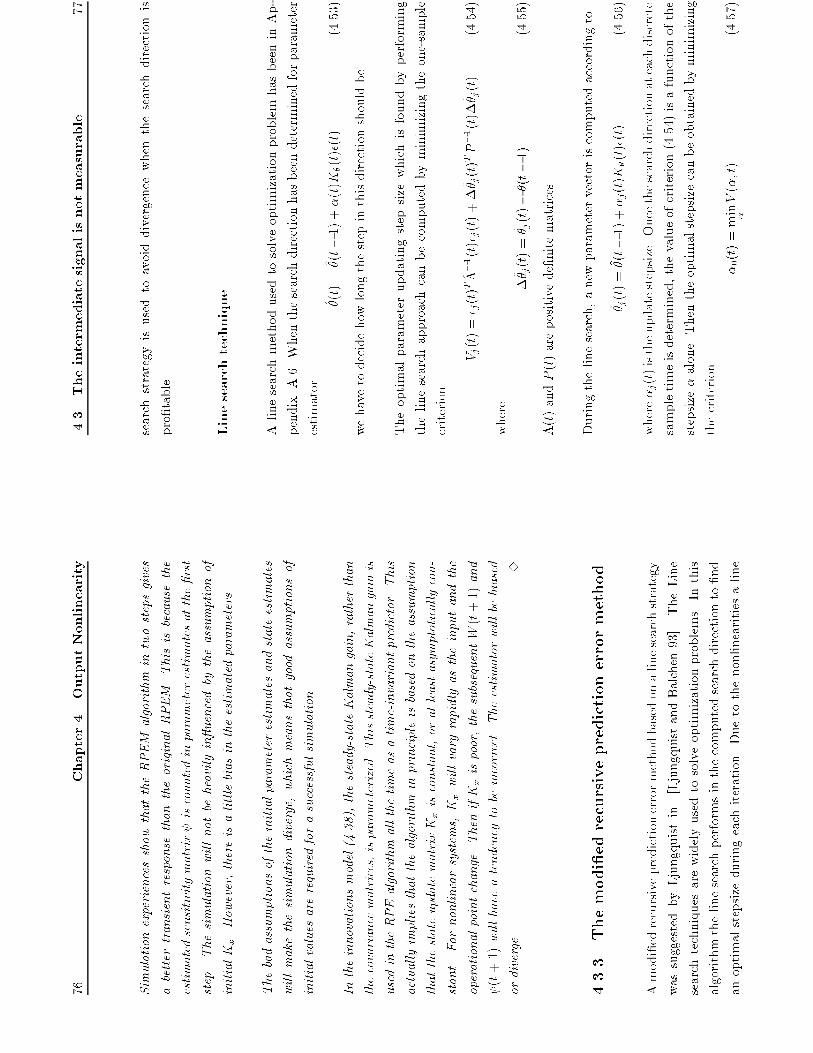
76
Chapter4.OutputNonlinearity
SimulationexperiencesshowthattheRPEM
algorithmintwostepsgives
abettertransientresponsethantheoriginalRPEM.Thisisbecausethe
estimatedsensitivitymatrix iscountedinparameterestimatesatthe�rst
step.Thesimulationwillnotbeheavilyin uencedbytheassumptionof
initialKx.However,thereisalittlebiasintheestimatedparameters.
Thebadassumptionsoftheinitialparameterestimatesandstateestimates
willmakethesimulationdiverge,whichmeansthatgoodassumptionsof
initialvaluesarerequiredforasuccessfulsimulation.
Intheinnovationsmodel(4.38),thesteady-stateKalmangain,ratherthan
thecovariancematrices,isparameterized.Thissteady-stateKalmangainis
usedintheRPEalgorithmallthetimeasatime-invariantpredictor.This
actuallyimpliesthatthealgorithminprincipleisbasedontheassumption
thatthestateupdatematrixKxisconstant,oratleastasymptoticallycon-
stant.Fornonlinearsystems,Kx
willvaryrapidlyastheinputandthe
operationalpointchange.ThenifKxispoor,thesubsequentW(t+1)and
(t+1)willhaveatendencytobeincorrect.Theestimatorwillbebiased
ordiverge.
3
4.3.3
Themodi�edrecursivepredictionerrormethod
Amodi�edrecursivepredictionerrormethodbasedonalinesearchstrategy
wassuggestedbyLjungquistin
[LjungquistandBalchen93].TheLine
searchtechniquesarewidelyusedtosolveoptimizationproblems.Inthis
algorithmthelinesearchperformsinthecomputedsearchdirectionto�nd
anoptimalstepsizeduringeachiteration.Duetothenonlinearitiesaline
4.3
Theintermediatesignalisnotmeasurable
77
searchstrategyisusedtoavoiddivergencewhenthesearchdirectionis
pro�table.
Linesearchtechnique
AlinesearchmethodusedtosolveoptimizationproblemhasbeeninAp-
pendixA.6.Whenthesearchdirectionhasbeendeterminedforparameter
estimator
^ �(t)=^ �(t�1)+�(t)K�(t)�(t)
(4.53)
wehavetodecidehowlongthestepinthisdirectionshouldbe.
Theoptimalparameterupdatingstepsizewhichisfoundbyperforming
thelinesearchapproachcanbecomputedbyminimizingtheone-sample
criterion
Vj(t)=� j(t)T^ ��1(t)�j(t)+�^ � j(t)TP�1(t)�^ � j(t)
(4.54)
where
�^ � j(t)=^ � j(t)�^ �(t�1)
(4.55)
�(t)andP(t)arepositivede�nitematrices.
Duringthelinesearch,anewparametervectoriscomputedaccordingto
^ � j(t)=^ �(t�1)+�j(t)K�(t)�(t)
(4.56)
where�j(t)istheupdatestepsize.Oncethesearchdirectionateachdiscrete
sampletimeisdetermined,thevalueofcriterion(4.54)isafunctionofthe
stepsize�alone.Thentheoptimalstepsizecanbeobtainedbyminimizing
thecriterion
�0(t)=min �V(�;t)
(4.57)
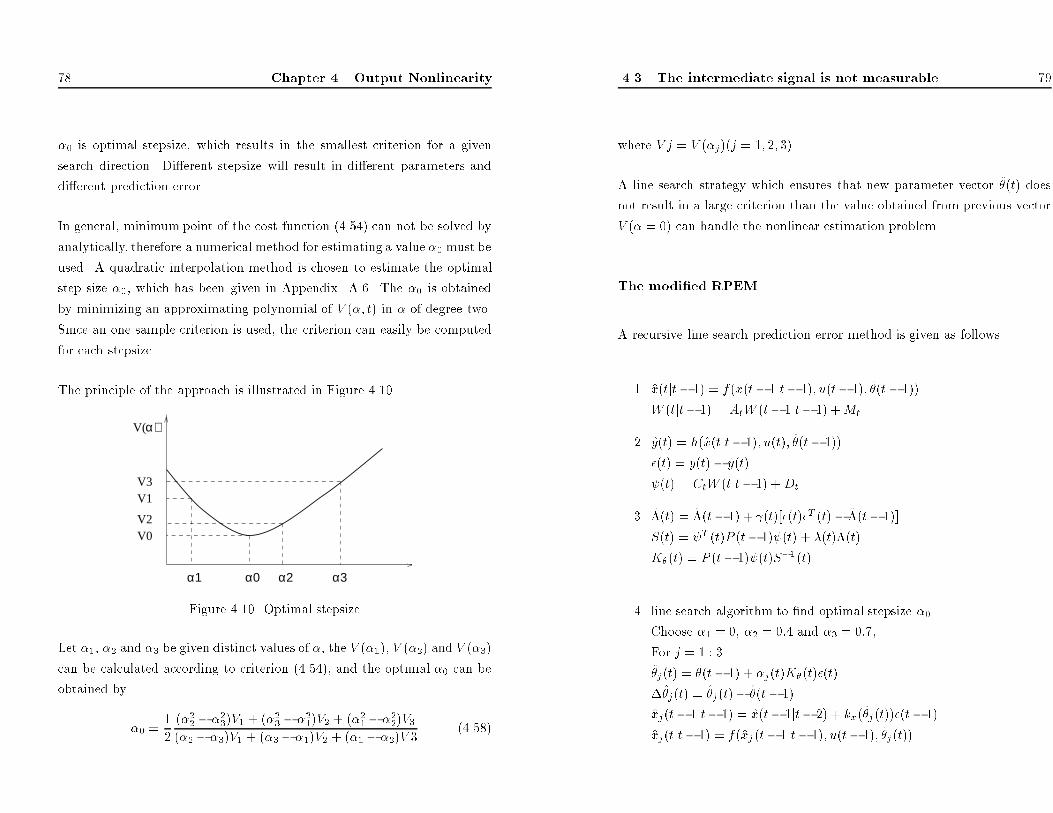
78 Chapter 4. Output Nonlinearity
�0 is optimal stepsize, which results in the smallest criterion for a given
search direction. Di�erent stepsize will result in di�erent parameters and
di�erent prediction error.
In general, minimum point of the cost function (4.54) can not be solved by
analytically, therefore a numerical method for estimating a value �0 must be
used. A quadratic interpolation method is chosen to estimate the optimal
step size �0, which has been given in Appendix A.6. The �0 is obtained
by minimizing an approximating polynomial of V (�; t) in � of degree two.
Since an one sample criterion is used, the criterion can easily be computed
for each stepsize.
The principle of the approach is illustrated in Figure 4.10.
V(
V3
α
α1 α0 α2 α3
)
V1
V2V0
Figure 4.10. Optimal stepsize
Let �1, �2 and �3 be given distinct values of �, the V (�1), V (�2) and V (�3)
can be calculated according to criterion (4.54), and the optimal �0 can be
obtained by�0 =
12
(�22 � �23)V1 + (�23 � �21)V2 + (�21 � �22)V3
(�2 � �3)V1 + (�3 � �1)V2 + (�1 � �2)V 3
(4.58)
4.3 The intermediate signal is not measurable 79
where V j = V (�j)(j = 1; 2; 3).
A line search strategy which ensures that new parameter vector ^�(t) does
not result in a large criterion than the value obtained from previous vector
V (� = 0) can handle the nonlinear estimation problem.
The modi�ed RPEM
A recursive line search prediction error method is given as follows.
1. ^x(tjt� 1) = f(^x(t� 1jt� 1); u(t� 1); ^�(t � 1))
W (tjt� 1) = AtW (t� 1jt� 1) +Mt
2. ^y(t) = h(^x(tjt� 1); u(t); ^�(t� 1))
�(t) = y(t) � ^y(t)
(t) = CtW (tjt� 1) +Dt
3. ^�(t) = ^�(t� 1) + (t)[�(t)�T (t) � ^�(t� 1)]
S(t) = T (t)P (t� 1) (t) + �(t)^�(t)
K�(t) = P (t� 1) (t)S�1(t)
4. line search algorithm to �nd optimal stepsize �0.
Choose �1 = 0, �2 = 0:4 and �3 = 0:7,
For j = 1 : 3
^�j(t) = ^�(t� 1) + �j(t)K�(t)�(t)
�^�j(t) = ^�j(t)� ^�(t � 1)
^xj(t� 1jt� 1) = ^x(t� 1jt� 2) + kx(^�j(t))�(t� 1)
^xj(tjt� 1) = f(^xj (t� 1jt� 1); u(t� 1); ^�j(t))
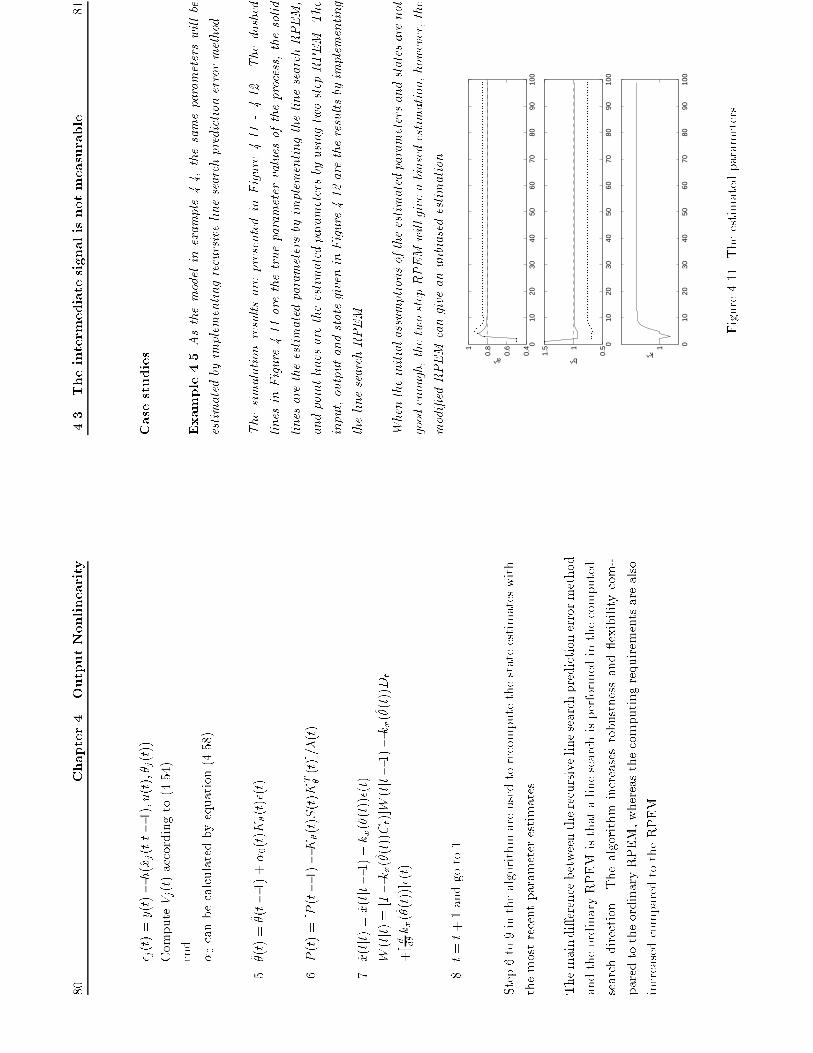
80
Chapter4.OutputNonlinearity
� j(t)=y(t)�h(^xj(tjt�1);u(t);^ � j(t))
ComputeVj(t)accordingto(4.54)
end
�0canbecalculatedbyequation(4.58).
5.^ �(t)=^ �(t�1)+�0(t)K�(t)�(t)
6.P(t)=[P(t�1)�K�(t)S(t)KT �(t)]=�(t)
7.^x(tjt)=^x(tjt�1)+kx(^ �(t))�(t)
W(tjt)=[I�kx(^ �(t))Ct)]W(tjt�1)�kx(^ �(t))Dt
+[d d�kx(^ �(t))]�(t)
8.t=t+1andgoto1.
Step6to9inthealgorithmareusedtorecomputethestateestimateswith
themostrecentparameterestimates.
Themaindi�erencebetweentherecursivelinesearchpredictionerrormethod
andtheordinaryRPEMisthatalinesearchisperformedinthecomputed
searchdirection.Thealgorithmincreasesrobustnessand exibilitycom-
paredtotheordinaryRPEM,whereasthecomputingrequirementsarealso
increasedcomparedtotheRPEM.
4.3
Theintermediatesignalisnotmeasurable
81
Casestudies
Example4.5Asthemodelinexample4.4,thesameparameterswillbe
estimatedbyimplementingrecursivelinesearchpredictionerrormethod.
ThesimulationresultsarepresentedinFigure4.11-4.12.Thedashed
linesinFigure4.11arethetrueparametervaluesoftheprocess,thesolid
linesaretheestimatedparametersbyimplementingthelinesearchRPEM,
andpointlinesaretheestimatedparametersbyusingtwostepRPEM.The
input,outputandstategiveninFigure4.12aretheresultsbyimplementing
thelinesearchRPEM.
Whentheinitialassumptionsoftheestimatedparametersandstatesarenot
goodenough,thetwostepRPEMwillgiveabiasedestimation,however,the
modi�edRPEM
cangiveanunbiasedestimation.
010
2030
4050
6070
8090
100
0.4
0.6
0.81
a^
010
2030
4050
6070
8090
100
0.51
1.5
b^0
1020
3040
5060
7080
9010
0
1k^
Figure4.11.Theestimatedparameters.

82
Chapter4.OutputNonlinearity
010
2030
4050
6070
8090
100
050100
u
010
2030
4050
6070
8090
100
050100
150
x and xhat
Sam
ples
010
2030
4050
6070
8090
100
0
100
200
300
y
Figure4.12.Theinputandoutput
Thesimulationindicatesthatthemodi�edRPEM
performsbetterthanthe
originalRPEM.Therobustnessofthemodi�edalgorithmishigher,since
toolongandtooshortupdatingstepsduringtransientsareavoided.But
themodi�edRPEM
willincreasethecomplexityandcomputationalcosts.
Anywaytheexampleindicatesthattherecursivelinesearchpredictionerror
methodispreferableforanonlinearsystemwithnonlinearityatoutput.3
4.4
Summary
Whentheintermediatesignalbetweenlinearpartandnonlinearpartof
thenonlinearmodelismeasurable,theproblem
willbesimpli�ed.The
identi�cationcanthenbeimplementedforlinearpartandnonlinearpart
4.4
Summary
83
separately.Inthiscasetheonlydi�erencebetweentheoutputnonlinearity
andinputnonlinearityisthatinputfortheprocesswithoutputnonlinearity
isnotdetermineddirectlybutthoughthelineardynamics.
Whentheintermediatesignalbetweenlinearpartandnonlinearpartisnot
measurable,theparameterestimationbecomesverycomplex.Sincethe
extremumcontrollawreliesheavilyontheestimatedmodel,theestimation
problemisthenthekeypointofimplementationofthecontrollaw.
Someoftheconclusionsreachedinthischapterarebasedonwell-established
theory,othersarebasedonsimulationstudies,sincenonlinearsystemsare
di�culttodealwithstrictlytheoretically.Clearly,simulationstudiesdo
notprovethatonestrategyisingeneralbetterthananother,buttheycan
showthatoneapproachispreferabletoanotherforaclassofproblems.
Forthesystemwithknownnoisestructureandweaknonlinearity,theEKF
asajointstateandparameterestimatorworkswell.However,forthesystem
withunknowndynamicsandunknownnoisestructure,themethodmaygive
biasedestimates,anditdoesnotseldomdivergeiftheinitialestimatesare
notsu�cientlygood.Thereasonfordivergencecanbeinterpretedthatthe
e�ectontheKalmangainKx
ofachangein�isnottakenintoaccount.
ThislackofcouplingbetweenKx(t)and�inthealgorithmmayleadto
divergenceoftheestimates.
Example
4.3simulatesofthebehaviouroftheEKFestimatorandex-
tremumcontrolleronanonlinearsystemwithknownnoisevariances.The
EKFalgorithmandextremumcontrollawworkwellinthiscase.However,
theEKFalgorithmasastateandparameterestimatorismoresensitive
whenitisappliedtoanonlinearsystemratherthanalinearsystem.For
84
Chapter4.OutputNonlinearity
anonlinearsystem,thestateupdatematrixKx(t)inthealgorithmiscal-
culatedbyusingalinearizedmodelwhichisactuallyanapproximationof
thetruemodel.Theapproximationwillmakethealgorithmmoresensitive.
Thepoormodelparameterestimateswillmakethealgorithmtodiverge,
since[dKx=d�]�(t)isnotaccountedforinthealgorithm.
Inordertoimprovetheglobalconvergenceresults,theRPEM
isapplied
foraninnovationsmodel.The[d=d�� Kx(�)]�(t)isincludedintheRPEalgo-
rithm.Inexample4.4atwostepRPEalgorithmisappliedtoaninnovations
model.Theestimatorandregulatorworkwelliftheinitialassumption
aboutestimatedparametersandstatesaregoodenough.TheRPEMbased
ontheinnovationsstate-spacemodelmeansthatthealgorithminprinciple
isbasedontheassumptionthatthestateupdatingmatrixKxisconstant,at
leastasymptotically.However,foranonlinearsystemKxwillvaryrapidly
astheinputsandtheoperationalpointchange,atleastwhentheestimation
hasnotconvergedandextremumpointhasnotbeenreached.IfKxispoor,
thesubsequentW(t+1)and (t+1)willhaveatendencytobeincorrect.
Theestimatorwillbebiasedordiverge.
BoththeEKFalgorithmasjointstateandparameterestimationmethod
andtheRPEMcanbesuccessfullyappliedtoanumberofestimationprob-
lems.
Amodi�edRPEalgorithmbasedonline-searchstrategyisdevelopedin
section4.3.3.Inthisalgorithmtheline-searchperformsinthecomputed
searchdirectionto�ndanoptimalstepsizeduringeachiteration.Example
4.5showsthatthemodi�edRPEalgorithm
givesabetterperformance
thantheoriginalRPEalgorithm.Therobustnessofmodi�edalgorithmis
increased,sincetoolongandtooshortstepsareavoided.
Chapter5
Conclusions
Problemsofextremum
controlhavebeenfrequentlystudiedbyagood
numberofauthors.Thereasonmaybethepossibilitytodescribeseveral
interestingpracticalproblems.Thereare,e.g.,industrialprocesseswhere
theobjectofcontrolistomaximizesomephysicalvariablesuchasanef-
�ciency.Ifthereexistssomeoptimalvalueforthecontrolvariablegiving
maximalvaluefortheoutput,thentheproblemisofthistype.
Toperform
adaptiveextremum
controlofnonlinearsystems,itisneces-
sarytomakeassumptionsaboutthestructureoftheprocess.Oneofclass
ofsystemsisobtainedbydividingtheprocessintoanonlinearstaticpart
andlineardynamicpart.Approximationtheoryisusedtoderivedi�erent
typesofseriesexpansionrepresentationsofnonlinearsystems.Therepre-
sentationsincludeVolterra,WienerandUrysonseries.Theycanbeusedto
modeltheprocesseswherethelineardynamicsisfollowedbyanonlinearity.
85
86
Chapter5.Conclusions
TheUrysonseriescanalsoincludethenonlinearityattheinput.Aspe-
cialcaseofUrysonseriesisrepresentedbyHammersteinmodels,whichare
commoncon�gurationsconsideredintheextremumcontrolsystems.The
state-spacemodelscanalsobeemployedtodescribenonlinearprocesses.
Forasystemwithinputnonlinearity,ifthesystemsareunknown,theyhave
tobeidenti�ed.Mostidenti�cationmethodsarebasedontheassumption
thatthemodelislinearinparameters.AHammersteinmodeloftheprocess
withtheinputnonlinearityhasthiskindofproperty.Anon-linerecur-
siveestimationalgorithm,e.g.,therecursiveextendedleastsquares(RELS)
methodisappliedtoidentifytheparametersofthemodel.Theextremum
controllawisderivedbymaximizingorminimizingthestaticresponseof
processoutput,whichwillkeeptheprocessoperatingat,orinthevicin-
ityof,theextremumpointoftheperformancefunctionorprocessoutput
despiteofthein uenceofthedisturbances.Atestperturbationsignalis
necessarytoensuretheparameteridenti�ability,whichhasbeenprovedby
analyzingconvergencepropertiesbyusingODEapproach.Twoexamples
havebeengiventoshowthegoodconvergencepropertiesoftheestimator
andgoodbehaviouroftheextremumcontroller.
Fortheprocesswithoutputnonlinearity,twodi�erentcaseshavebeendis-
cussedaccordingtothattheintermediatesignalcanbemeasuredornot.
Di�erentmodelsandestimationmethodswillbeusedatdi�erentcases.
Iftheintermediatesignalcanbemeasured,theRELSalgorithmisemployed
toestimatetheparametersforlinearpartandnonlinearpartseparately.
Theonlydi�erencebetweentheoutputnonlinearityandinputnonlinearity
isthatitsextremumcontrollawwillnotbedetermineddirectly,butthrough
87
lineardynamics.Thesimulationexamplesshowthegoodbehaviourofthe
estimatorandcontroller.
Iftheintermediatesignalisnotmeasurable,theproblem
becomesquite
complex.Sincetheextremumcontrollawdependheavilyontheestimated
model,theestimationproblembecomesthekeypointoftheadaptiveex-
tremumcontrolalgorithm.
FirstofalltheextendedKalman�lterasajointstateandparameteresti-
matorisconsidered.Astate-spacemodeloftheprocessisemployedinorder
toimplementtheEKFalgorithm.Simulationsforaprocesswithunknown
nonlineardynamicsandknownnoisestructureshowthegoodconvergence
propertiesoftheEKFalgorithmiftheassumedinitialvaluesofstateand
parameterestimatesaregoodenough.
Itisawell-knownfactthatthebehaviorofEKFasjointstateandparam-
eterestimatorissensitivetoaprioristatisticsassumptions,anddivergence
mayoccuriftheinitialstateandparameterestimatesarenotsu�ciently
good.Thealgorithmmayconvergeonlyiftheassumptionsaboutthenoise
structureofthemodelareinaccordancewiththoseofthetruesystem.
Otherwisetheestimateswillbebiased.
However,theEKFalgorithmismoresensitivewhenitisappliedtoanon-
linearsystem.SincethestateupdatematrixKx
iscomputedbasedona
linearizedmodelthatisactuallyanapproximationofthetruemodel.When
thelinearizedmodelisapplied,thesteady-stateKalmandependsalsoon
theestimatedstates.Thealgorithmwillthenbemoresensitive.Thepa-
rameterestimateswillbepoorwhentheestimatedstatesarenotcloseto
thetruevalues.Thepoormodelwillmaketheestimationtodiverge.

88
Chapter5.Conclusions
Ljungsuggestedtherecursivepredictionerrormethod(RPEM)appliedfor
aninnovationsmodeltoimprovetheglobalconvergenceresults.Simulation
indicatesthatestimatorandregulatorworkwelliftheinitialassumptions
aboutestimatedparametersandstatesaregoodenough.TheRPEMbased
ontheinnovationsstate-spacemodelimpliesthatthealgorithminprinciple
isbasedontheassumptionthatthestateupdatingmatrixKxisconstant,
atleastasymptotically.However,forthenonlinearsystemKxwillchange
rapidlyastheinputsandtheoperationalpointchange.
Amodi�edRPEalgorithmbasedonline-searchstrategyispreferablefor
anonlinearsystem.Inthisalgorithmtheline-searchperformsinthecom-
putedsearchdirectionto�ndanoptimalstepsizeduringeachiteration.
Simulationshaveshowedthatthemodi�edRPEalgorithm
hasabetter
performancethantheoriginalRPEalgorithmforanonlinearprocesswith
unknownlineardynamicandnoisestructure.Theincreasedrobustnessof
themodi�edRPEisespeciallyimportantwhentheestimationschemeisto
beappliedonline.
ThesimulationsindicatethatboththeEKFalgorithmasjointstateand
parameterestimationmethodandtheRPEMcanbesuccessfullyappliedto
anumberofestimationproblems.Itisconsequentlyimpossibletostatethat
onealgorithmisalwayspreferabletoanother.Theavailableinformationis
veryimportanttoselectthebestmethodforagivenapplication.
Bibliography
[BambergerandIsermann78]W.BambergerandR.Isermann.Adaptive
On-lineSteady-StateOptimizationofSlowDynamicProcess.Au-
tomatica,Vol.14,pp223-230.1978.
[Blackman1962]P.F.Blackman.Extremum-seekingRegulators.AnExpo-
sitionofAdaptiveControl.PergamonPress,1962.
[Frandsenetal.95]PoulE.Frandsen,KristianJonassonandOleTingle�.
UnconstrainedOptimization.Notestothecourse\Algorithmsfor
non-linearOptimization".InstituteofMathematicalModelling,
TechnicalUniversityofDenmark.1995.
[GoldenandYdstie89]MelindaP.GoldenandB.ErikYdstie.AdaptiveEx-
tremum
ControlUsingApproximateProcessModels.AIChE
Journal,July,1989,Vol.35,No.7.
[GoodwinandSin84]GrahamC.GoodwinandKwaiS.Sin.AdaptiveFil-
teringPredictionandControl.PrenticeHall.1984.
89
90
BIBLIOGRAPHY
[HaberandKeviczky76]R.HaberandL.Keviczky.Identi�cationofNon-
linearDynamicSystems.Proc.of4thIFACSymposiumonIden-
ti�cationandSystemParameterEstimation,Tbilisi,USSR.Sept,
1976.
[JacobsandLangden70]O.L.R.JacobsandS.M.Langdon.AnOptimalEx-
tremalControlSystem.Automatic,Vol.6,pp.297-301.1970.
[Jazwinski70]Andrew
H.Jazwinski.StochasticProcessesandFiltering
Theory.AcademicPress,NewYork.1970.
[KeviczkyandHaber74]L.KeviczkyandR.Haber.AdaptiveDualEx-
tremumControlbyHammersteinModel.Proc.IFACSymposium
onStochasticControl,pp333-341.Budapest,1974.
[Keviczky78]L.K.Keviczky.NonlinearDynamicIdenti�cationofaCe-
mentMilltobeOptimized.Proc.of4thIFACSymposium
on
Identi�cationandSystemParameterEstimation,Tbilisi,USSR.
Sept,1976.
[Keviczkyetal.79]L.Keviczky,I.VajkandJ.Hetth�essy.ASelf-TuningEx-
tremalControllerfortheGeneralizedHammersteinModel.Proc.
IFACSymposiumonIdenti�cation,pp.1147-1151,1979.Darm-
stadt.
[Ljung77]LennartLjung.AnalysisofRecursiveStochasticAlgorithms.
IEEETrans.onAutomaticControl,vol.AC-22,no.4,Aug.1977.
[Ljung79b]LennartLjung.AsymptoticBehavioroftheExtendedKalman
FilterasaParameterEstimatorforLinearSystems.IEEETrans.
onAutomaticControl,vol.AC-24,no.1,Feb.1979.
[LjungandS�oderstr�om83]LennartLjungandTorstenS�oderstr�m.Theory
andPracticeofRecursiveIdenti�cation.TheMITPress,1983.
BIBLIOGRAPHY
91
[Ljung87]LennartLjung.System
Identi�cation:TheoryfortheUser.
Prentice-Hall,Inc.,EnglewoodCli�s,NewJersey.1987.
[Ljungquist90]DagLjungquist.
OnlineEstimationinNonlinearState-spaceModelswithAppli-
cationtoCatalyticCracking.Dr.Ing.Thesis,NorwegianInstitute
ofTechnology.1990.
[LjungquistandBalchen93]DagLjungquistandJensG.Balchen.Recur-
sivePredictionErrorMethodsforOnlineEstimationinNonlinear
State-Spacemodels.Proc.ofthe32ndConf.onDecisionand
Control,Texas.Dec.1993.
[Madsen95]KajMadsen.MinimeringafKvadratsummer,H�fte38.In-
stituteofMathematicalModelling,TechnicalUniversityofDen-
mark.1995.
[MadsenandHolst96]HenrikMadsenandJanHolst.ModellingNon-linear
andNon-stationaryTimeseries.InstituteofMathematicalMod-
elling,TechnicalUniversityofDenmark.1996.
[NavarroandZarrop95]LuisB.NavarroandMartinB.Zarrop.Extremum
ControlApproachtoStochasticControl.Proceedingsof3rdEu-
ropeanControlConference,Rome,Italy,September,1995.
[Poulsen95]NielsK.Poulsen.StokastiskAdaptivRegulering.Instituteof
MathematicalModelling,TechnicalUniversityofDenmark.1995.
[Sternby78]JanSternby.AnalysisofanExtremumControllerforHammer-
steinModels.Report,DepartmentofAutomaticControl,Lund
University,1978.

92
BIBLIOGRAPHY
[Sternby80a]JanSternby.AdaptiveControlofExtremumSystems.Pro-
ceedingsofanInternationalSymposium
onAdaptiveControl,
Bochum,March,1980.
[Sternby80b]JanSternby.ExtremumControlSystems-AnAreaforAdap-
tivecontrol?ProceedingsoftheJointAutomaticControlConfer-
ence,Vol.1,WA2-A.1980.
[S�oderstr�omandStoica89]TorstenS�oderstr�om
andPetreStoica.System
Identi�cation.PrenticeHall,1989.
[Vadstrup85]Pierr�eVadstrup.Ikke-line�reSystemer.InternRapport,Ser-
volaboratoriet,DTH,December,1985.
[Vadstrup88]Pierr�eVadstrup.AdaptivReguleringafIkke-line�reSyste-
mer.Licentiatafhandling,Servolaboratoriet,DTH.Danmark.De-
cember,1988.
[WellsteadandScotson90]P.E.WellsteadandP.G.Scotson.Self-tuningEx-
tremumControl.IEEProceedings,Vol.137,Pt.D,No.3,May,
1990.
[WellsteadandZarrop91]P.E.WellsteadandMartinB.Zarrop.Self-tuning
Systems:ControlandSignalProcessing.JohnWiley&SonsLtd,
1991.
[Wittenmark93]Bj�ornWittenmark.AdaptiveControlofaStochasticNon-
linearSystem:AnExample.InternationalJournalofAdaptive
ControlandSignalProcessing,Vol.7,327-337,1993.
[Wolfe78]MichaelA.Wolfe.NumericalMethodsforUnconstrainedOpti-
mization.VanNostrandReinholdCompany,GreatBritain.1978.
BIBLIOGRAPHY
93
[ZarropandRommens93]MartinB.ZarropandM.J.J.J.Rommens.Con-
vergenceofaMulti-inputAdaptiveExtremumController.IEE
Proceedings-D,Vol.140,No.2,March1993.
[Zarrop94]MartinB.Zarrop.Self-tuningExtremum
ControlwithCon-
straints.IEEConferencePublication,No.389,March,1994.
[� Astr�omandWittenmark89]KarlJ.� Astr�om
and
Bj�orn
Wittenmark,
AdaptiveControl.Addison-Wesley,Reading,MA,1989.

94
BIBLIOGRAPHY
PartII
ModellingandControlof
AWindTurbine
95

97
Glossary
Notations
Ac,Bc,Cc,Dc,Lc
Matricesincontinuous-timestate-spacemodel
Ad,Bd,Cd,Dd
Matricesindiscrete-timestate-spacemodel
A3p,B3p,C3p
Matricesinstate-space3p-e�ectmodel
Aw,Bw,Cw
Matricesinstate-spacewindmodel
Ap,Bp,Cp,Dp,Lp
Matricesinstate-spaceturbinemodel
Cp
Powercoe�cient
Cp;max
Maximumpowercoe�cient
Ct
Forcecoe�cient
Dg
Slopeoftorque-speedcurve
[Nms/rad]
Dt
Towerdamping
[kg/s]
e
Whitenoisevector
f
Frequency
[Hz]
Ft
Axialforce
[N]
h
Measuringheight
[m]
ht
Towerheight
[m]
Hi
Heightofconvectiveboundarylayer
[m]
J
Performancefunction
Jr
Rotorandlowspeedshaftinertia
[kgm2]
Jg
Highspeedshaftandgeneratorinertia
[kgm2]
k
Gainofwindspeedmodel
K
Kalmangain
k3p
Gainin3P-e�ectmodel

98 kt
Towersti�ness
[kg=s2]
Kp
ProportionalgaininPIregulator
[o=KW]
Ks
Springcoe�cientofthedrivetrain
[Nm/rad]
K�
Gainofpitchactuator
l t
Nacelledisplacement
[m]
L
Monon-Obukhovlength
[m]
L
Feedbackgain
mt
Massofnacelleandrotor
[kg]
m1
Phasenumberofgeneratorstator
ngear
Gearratio
np
Numberofpolepairsingenerator
p1,p2
Parametersofwindmodel
Pe
Producedelectricalpower
[W]
Pr
Rotorpower
[W]
Qy,Qu,Qi
Weightingmatrices
Q1,Q2
Weightingparameters
r
Roughnesslength
[cm]
r
Reference
R
Rotorradius
[m]
R1,R2
Resistancesofgeneratorstatorandrotorwinding
R1,R2
Variancematricesofstateandmeasurementnoise
S
Slip
Tem
Electromagnetictorque
[Nm]
Tg
Generatormechanicaltorque
[Nm]
Tg;ref
Generatortorquereference
[Nm]
Ths
Torqueonthehighspeedshaft
[Nm]
Ti
IntegrationtimeinPIregulator
[s]
Tls
Torqueonthelowspeedshaft
[Nm]
Tn
3P-e�ectontorque
[Nm]
99
Tr
Rotortorque
[Nm]
Ts
Samplingtime
[s]
Tr
Rotoraerodynamictorque
[Nm]
u
Inputvector
v
E�ectivewindspeedexperienced
bytherotor
[m/s]
^v
Estimatedwindspeed
[m/s]
v m
Averagewindspeed
[m/s]
v wind
Windspeed
[rad/s]
v �0
Frictionvelocity
[m/s]
w
Statenoisevector
x
Statevector
xi
Integralstate
xw
Windmodelstatevector
x3p
3P-e�ectmodelstatevector
^x
Estimatedstatevector
�x
Augmentedstate
y
Outputvector
�
Pitchangle
[deg]
�ref
Referencepitchangle
[deg]
�
Generatore�ciency
�gear
E�ciencycoe�cientofgearbox
�
VonK�arm�anconstant
�
Tipspeedratio
�opt
Optimaltipspeedratio
!
Frequency
[rad/s]
!0
Gridfrequency
[rad/s]
!g
Angularvelocityofhighspeedshaft
andgenerator
[rad/s]
100
!r
Angularvelocityofrotor
[rad/s]
!r;ref
Rotorspeedreference
[rad/s]
!r;opt
Optimalrotorspeed
[rad/s]
!t
Angularvelocityoftowerbendingmovement[rad/s]
�
Airdensity
[kgm3]
�2 p
Varianceofpointwindspeed
�2 v
Varianceofe�ectivewindspeed
� �
Timeconstantofpitchactuator
� g
Highspeedandgeneratorshaftangle
[rad]
� ls
Lowspeedshaftangle
[rad]
� r
Rotorshaftangle
[rad]
� t
Angleoftowerbending
[deg]
� �
Torsionofdrivetrain
[rad]
�
Dampingratioin3P-e�ectmodel
Abbreviations
LQG
LinearQuadraticGaussiancontrollaw
RDE
RiccatiDi�erenceEquation
CS
ConstantSpeed
VS
VariableSpeed
Chapter6
Introduction
Owingtocurrentconcernovertheenvironment,thereismuchinterestin
windpower.Inrecentyearswindturbinetechnologyhasundergonerapid
developmentinresponsetothedemandsforincreaseduseofrenewable
sourcesofenergy.Usingawindturbineforproductionofelectricalenergy
requiresreliableoperation.Especiallyathighwindspeeds uctuationsfrom
thewindresultinlargemechanicalloadsoftheturbine.Thereforeanactive
controlsystemisoftenusedtorealizealonglifetimeofturbineandproduce
highqualitypowerorincreaseenergycapture.Themaingoaloftheproject
istodevelophighperformancecontrolsystemsforawindturbine.
101
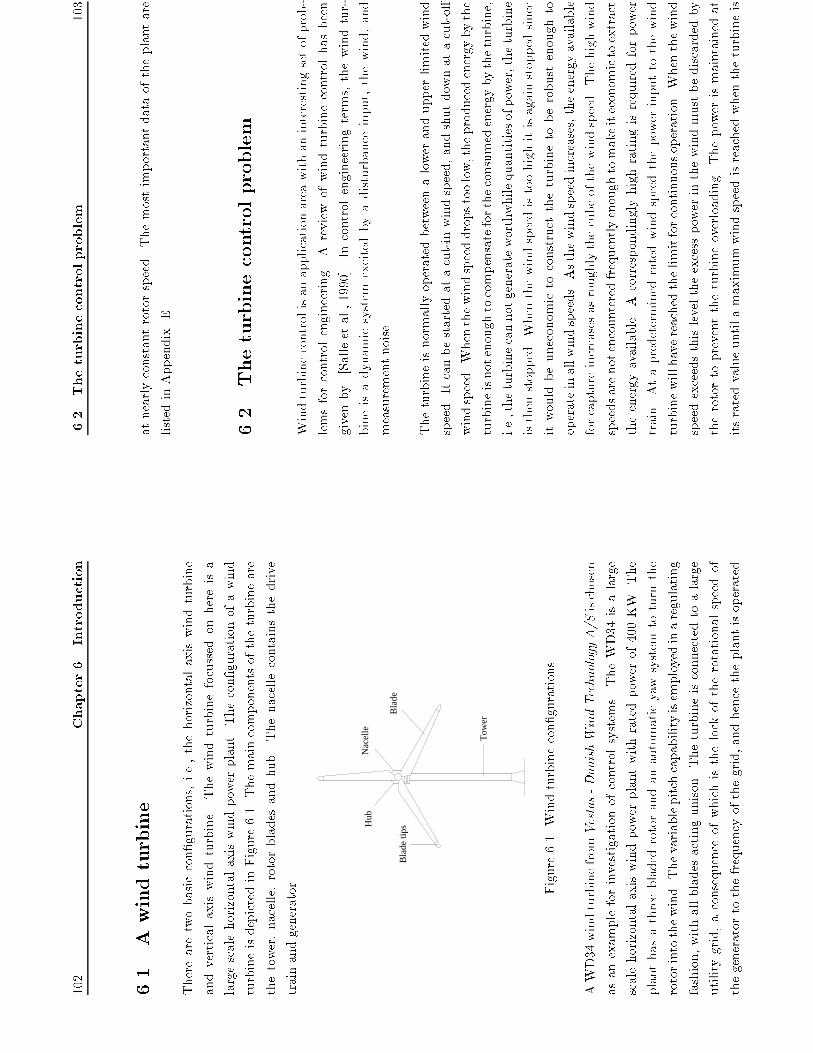
102
Chapter6.Introduction
6.1
A
windturbine
Therearetwobasiccon�gurations,i.e.,thehorizontalaxiswindturbine
andverticalaxiswindturbine.Thewindturbinefocussedonhereisa
largescalehorizontalaxiswindpowerplant.Thecon�gurationofawind
turbineisdepictedinFigure6.1.Themaincomponentsoftheturbineare
thetower,nacelle,rotorbladesandhub.Thenacellecontainsthedrive
trainandgenerator.
Tow
er
Hub
Bla
de ti
ps
Nac
elle
Bla
de
Figure6.1.Windturbinecon�gurations
AWD34windturbinefromVestas-DanishWindTechnologyA/Sischosen
asanexampleforinvestigationofcontrolsystems.TheWD34isalarge
scalehorizontalaxiswindpowerplantwithratedpowerof400KW.The
planthasathreebladedrotorandanautomaticyawsystem
toturnthe
rotorintothewind.Thevariablepitchcapabilityisemployedinaregulating
fashion,withallbladesactingunison.Theturbineisconnectedtoalarge
utilitygrid,aconsequenceofwhichisthelockoftherotationalspeedof
thegeneratortothefrequencyofthegrid,andhencetheplantisoperated
6.2
Theturbinecontrolproblem
103
atnearlyconstantrotorspeed.Themostimportantdataoftheplantare
listedinAppendixE.
6.2
Theturbinecontrolproblem
Windturbinecontrolisanapplicationareawithaninterestingsetofprob-
lemsforcontrolengineering.Areviewofwindturbinecontrolhasbeen
givenby
[Salleetal.,1990].Incontrolengineeringterms,thewindtur-
bineisadynamicsystem
excitedbyadisturbanceinput,thewind,and
measurementnoise.
Theturbineisnormallyoperatedbetweenalowerandupperlimitedwind
speed.Itcanbestartedatacut-inwindspeed,andshutdownatacut-o�
windspeed.Whenthewindspeeddropstoolow,theproducedenergybythe
turbineisnotenoughtocompensatefortheconsumedenergybytheturbine,
i.e.,theturbinecannotgenerateworthwhilequantitiesofpower,theturbine
isthenstopped.Whenthewindspeedistoohighitisagainstoppedsince
itwouldbeuneconomictoconstructtheturbinetoberobustenoughto
operateinallwindspeeds.Asthewindspeedincreases,theenergyavailable
forcaptureincreasesasroughlythecubeofthewindspeed.Thehighwind
speedsarenotencounteredfrequentlyenoughtomakeiteconomictoextract
theenergyavailable.Acorrespondinglyhighratingisrequiredforpower
train.Atapredeterminedratedwindspeedthepowerinputtothewind
turbinewillhavereachedthelimitforcontinuousoperation.Whenthewind
speedexceedsthisleveltheexcesspowerinthewindmustbediscardedby
therotortopreventtheturbineoverloading.Thepowerismaintainedat
itsratedvalueuntilamaximumwindspeedisreachedwhentheturbineis
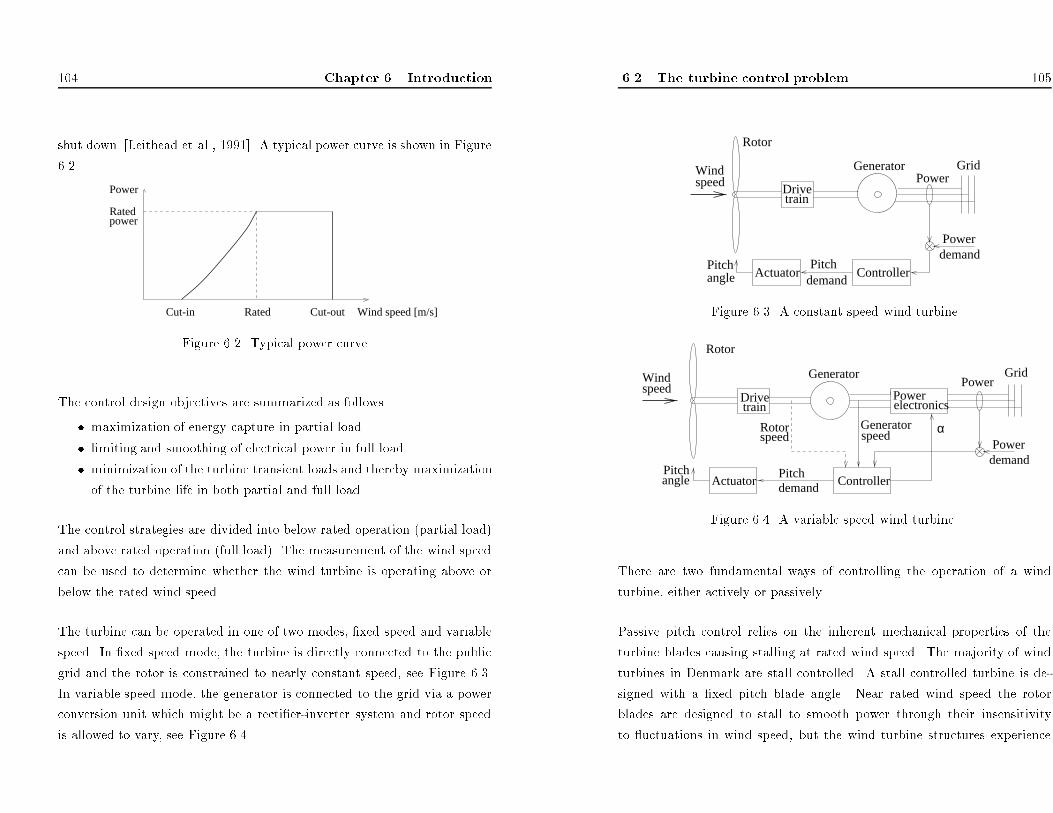
104 Chapter 6. Introduction
shut down [Leithead et al., 1991]. A typical power curve is shown in Figure
6.2.
Rated
Wind speed [m/s]
power
Power
Cut-in Rated Cut-out
Figure 6.2. Typical power curve
The control design objectives are summarized as follows
� maximization of energy capture in partial load.
� limiting and smoothing of electrical power in full load.
� minimization of the turbine transient loads and thereby maximization
of the turbine life in both partial and full load.
The control strategies are divided into below rated operation (partial load)
and above rated operation (full load). The measurement of the wind speed
can be used to determine whether the wind turbine is operating above or
below the rated wind speed.
The turbine can be operated in one of two modes, �xed speed and variable
speed. In �xed speed mode, the turbine is directly connected to the public
grid and the rotor is constrained to nearly constant speed, see Figure 6.3.
In variable speed mode, the generator is connected to the grid via a power
conversion unit which might be a recti�er-inverter system and rotor speed
is allowed to vary, see Figure 6.4.
6.2 The turbine control problem 105
demand
Drive train
Generator
Rotor
Wind speed
Powerdemand
GridPower
ControllerPitchangle Actuator
Pitch
Figure 6.3. A constant speed wind turbine
Power
Rotor
trainDrive
Generator
Generatorspeed
Rotorspeed
Pitchangle
Powerdemand
speedWind
Actuator demandPitch
Controller
α
GridPower
electronics
Figure 6.4. A variable speed wind turbine
There are two fundamental ways of controlling the operation of a wind
turbine, either actively or passively.
Passive pitch control relies on the inherent mechanical properties of the
turbine blades causing stalling at rated wind speed. The majority of wind
turbines in Denmark are stall controlled. A stall controlled turbine is de-
signed with a �xed pitch blade angle. Near rated wind speed the rotor
blades are designed to stall to smooth power through their insensitivity
to uctuations in wind speed, but the wind turbine structures experience

106
Chapter6.Introduction
greatermeanthrustloads[Leitheadetal.,1991].Astallingrotorisself-
regulatingprovidingpowerlimitingandgoodpowerqualitywithoutthe
needforacontrolsystem.Thegoodpowerqualityreferstotheextentof
rapid uctuationsinthegeneratedpowerissmall.Thepassivecontrolwill
notbediscussedinthisreport.
Activecontrolcanbeachievedbycontrollingthebladeangle(pitch),nacelle
rotation(yaw),andturbinerotationalspeed.
Thetorqueinducedontherotorbythewinddependsonthepitchan-
gleoftheblades.Hence,thetorquemaybereducedbyfeatheringand
viceversa.Aboveratedwindspeed,thepitchofthebladesarecontin-
uouslysettotheangleofpitchatwhichratedpowerisgenerated.The
adjustmentofpitchangleisusuallymadeinresponsetopowermeasure-
ment[Leitheadetal.,1992].Pitchcontrolhassofarbeenthedominating
methodforpowercontrol.Improvementinpowerqualityandalleviationof
fatiguedamagecanbeachievedbycontinuouslymonitoringthewindtur-
bineandalteringthepitchangleofthebladesaccordingly.Acontrolsystem
withtheabilitytovarypitchinanactivefeedbackcontrolisrequired.
Thevariablespeedconceptforwindturbinesisstillrelativelyrarelyim-
plemented.Invariablespeedwindturbinesthegeneratordoesnotdirectly
coupletothegrid.Thereforetherotorispermittedtorotateatanyspeed
bythepowergenerationunitwhichmightbeageneratorandafrequency
convertercombination.Forvariablespeedoperationtheremaybemore
thanonecontrolaction.Inthisprojecttheapproachistocombinevariable
speedoperationwithavariablepitchcapabilityinfullload.Thestrategyis
thentoregulatetheloadonthewindturbinebyadjustingtherotorspeed
andpitchangletomaintainpowergenerationatratedvalues.Inpartial
6.3
Outlineofthesecondpartofthethesis
107
loadthepitchangleis�xedatoptimalvalue,acontrollerwithoutpitch
actionthroughthegeneratorreactiontorquewillbeimplemented.The
controlstrategyisthentomaximizeenergycapturebyadjustingtherotor
speedtofollowthewindspeedvariations.
Onbothconstantandvariablespeedturbineselectricalpoweristhemost
readilyavailablemeasurementsignal.Inadditiontoelectricalpowermea-
surement,thegeneratorshaftspeedwillbemeasuredforavariablespeed
turbine.Inthecaseofpartialload,ameasurementofrotorspeedmayalso
berequiredforavariablespeedplant.
6.3
Outlineofthesecondpartofthethesis
Anoutlineofthesecondpartofthethesisisgiveninthissection.
Chapter
6isanintroductiontothewindturbinesystemsandcontrol
problems.Themotivationsbehindthedesigndecisionsareexplained.
Chapter7describesallthesigni�cantdynamicfeaturesencounteredona
practicalwindturbine,withemphasisontheuseofsuchamodelinthe
validationandinvestigationofcontrolsystems.Theresultisageneral
nonlinearmathematicalmodelwhichisusedforsimulations.Themodelis
validatedbyusingthedatafromanexistingWD34windturbine.
Chapter8containssimplelinearmodelsofwindturbineswhichwillbeused
fordesignofcontrollers.Similarmodelsfortheconstantspeedturbineand
108
Chapter6.Introduction
variablespeedturbinearederivedinthischapter.Thedesignmodelsare
madeassimpleaspossiblewhilekeepingallsigni�cantdynamics.
Chapter
9dealswithestimationofthewindspeedinconnectiontoa
windturbine.TheNewton-Raphsonmethod,Kalman�ltermethodand
extendedKalman�ltermethodareinvestigatedforbothpartialloadand
fullload.Theexperimentaldataareusedtotesttheestimationmethods.
Theproblemthatmightbecausedbythemethodsisdiscussedattheend
ofchapter.
Chapter10isconcernedwithcontrolofthewindturbinesinfullload.Both
theconstantspeedandvariablespeedturbineareinvestigated.Theactive
pitchcontrolisthemostpopularcontrolmethodinpracticalapplications.
TheemphasisofthechapterisgiventotheLQG
controlmethodfora
solelypitchcontrolledwindturbine,aswellasacombinedvariablespeed
andpitchcontrolwindturbine.
Chapter11isfocussedoncontrolofavariablespeedwindturbineinpar-
tialload.Belowratedwindspeedthecontrolstrategiesaretomaximizethe
energycapturefromthewindandminimizethetransientloads.Thepitch
angleofrotorbladesis�xedatoptimalvalue,controlwithoutpitchaction
throughthegeneratorreactiontorquewillbeimplemented.TheLQGcon-
trolandtrackingcontrolmethodsareinvestigatedandthetrade-o�hasto
bemadebetweendi�erentcontrolobjectives.Someimplementationconsid-
erationsaregivenattheendofthischapter.
Chapter
12givesasummaryandconclusionsofthesecondpartofthe
thesis.
Chapter7
SimulationModelofthe
WindTurbine
7.1
Introduction
Thischapterprovidesinsightintothemodellingofanentirewindturbine
system.Themotivationistogivetheinformationaboutdynamicsofawind
turbine,withemphasisupontheuseofsuchamodelintheinvestigationof
controlsystems.
Themajorcomponentsofaturbinearethetower,rotor(thebladesand
hub),drivetrainandpowergenerationunit.Thedrivingtrainconsistsof
thelow-speedshaft,gearboxandhigh-speedshaft.Thesimulationmodel
109
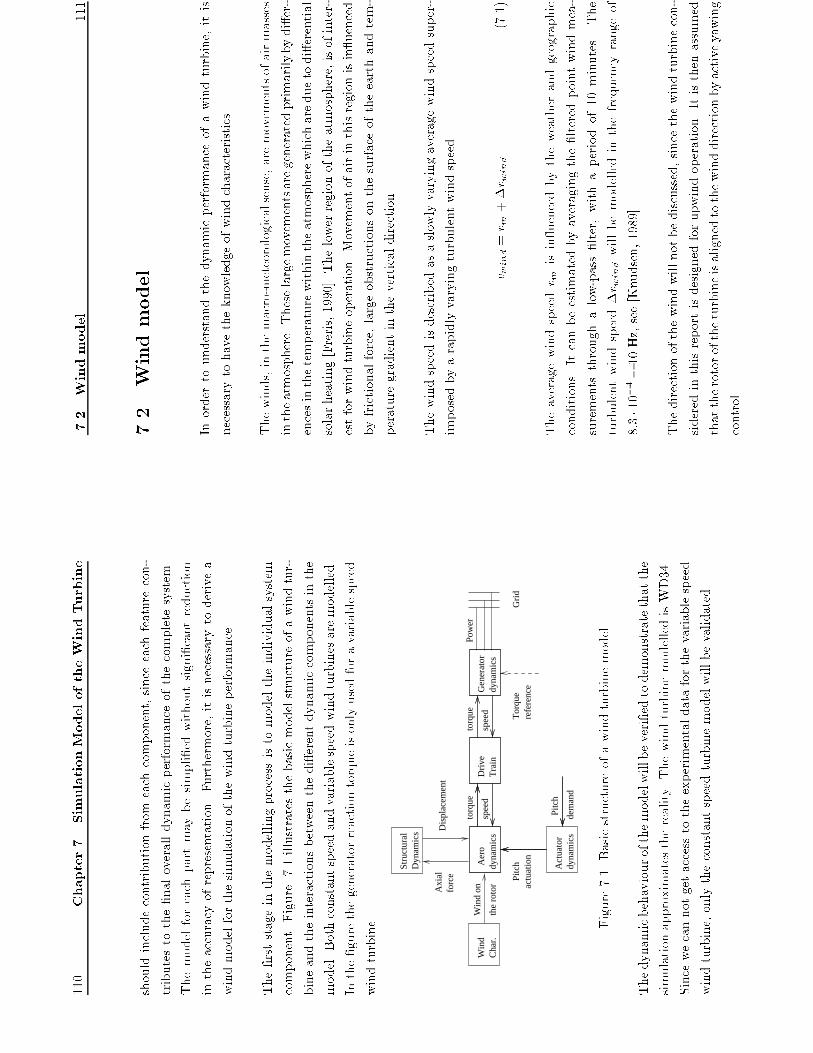
110
Chapter7.SimulationModeloftheWindTurbine
shouldincludecontributionfromeachcomponent,sinceeachfeaturecon-
tributestothe�naloveralldynamicperformanceofthecompletesystem.
Themodelforeachpartmaybesimpli�edwithoutsigni�cantreduction
intheaccuracyofrepresentation.Furthermore,itisnecessarytoderivea
windmodelforthesimulationofthewindturbineperformance.
The�rststageinthemodellingprocessistomodeltheindividualsystem
component.Figure7.1illustratesthebasicmodelstructureofawindtur-
bineandtheinteractionsbetweenthedi�erentdynamiccomponentsinthe
model.Bothconstantspeedandvariablespeedwindturbinesaremodelled.
Inthe�gurethegeneratorreactiontorqueisonlyusedforavariablespeed
windturbine.
the
roto
rA
ero
dyna
mic
sD
rive
Tra
indy
nam
ics
Act
uato
rdy
nam
ics
Gen
erat
orto
rque
spee
d
torq
ue
spee
d
Pitc
h
dem
and
Pitc
hac
tuat
ion
Pow
er
Gri
d
Stru
ctur
alD
ynam
ics D
ispl
acem
ent
Axi
alfo
rce
Cha
r.W
ind
Tor
que
refe
renc
e
Win
d on
Figure7.1.Basicstructureofawindturbinemodel
Thedynamicbehaviourofthemodelwillbeveri�edtodemonstratethatthe
simulationapproximatesthereality.ThewindturbinemodelledisWD34.
Sincewecannotgetaccesstotheexperimentaldataforthevariablespeed
windturbine,onlytheconstantspeedturbinemodelwillbevalidated.
7.2
Windmodel
111
7.2
Windmodel
Inordertounderstandthedynamicperformanceofawindturbine,itis
necessarytohavetheknowledgeofwindcharacteristics.
Thewinds,inthemacro-meteorologicalsense,aremovementsofairmasses
intheatmosphere.Theselargemovementsaregeneratedprimarilybydi�er-
encesinthetemperaturewithintheatmospherewhichareduetodi�erential
solarheating[Freris,1990].Thelowerregionoftheatmosphere,isofinter-
estforwindturbineoperation.Movementofairinthisregionisin uenced
byfrictionalforce,largeobstructionsonthesurfaceoftheearthandtem-
peraturegradientintheverticaldirection.
Thewindspeedisdescribedasaslowlyvaryingaveragewindspeedsuper-
imposedbyarapidlyvaryingturbulentwindspeed.
v wind=v m+�v wind
(7.1)
Theaveragewindspeedv misin uencedbytheweatherandgeographic
conditions.Itcanbeestimatedbyaveragingthe�lteredpointwindmea-
surementsthroughalow-pass�lter,withaperiodof10minutes.The
turbulentwindspeed�v wind
willbemodelledinthefrequencyrangeof
8:3�10�4�10Hz,see[Knudsen,1989].
Thedirectionofthewindwillnotbediscussed,sincethewindturbinecon-
sideredinthisreportisdesignedforupwindoperation.Itisthenassumed
thattherotoroftheturbineisalignedtothewinddirectionbyactiveyawing
control.

112
Chapter7.SimulationModeloftheWindTurbine
Forawindturbine,itisusualtomeasurethewindspeedbyananemometer
situatedonthetopofnacelle.Themeasuredwindspeediscalledpointwind
speed.Althoughthereisnosuchthingasthewindspeedexperiencedby
thewindturbine,sincetherotorissubjecttoaspatiallydistributedwind
�eldwhichvariesintime,theturbinemaybeconsideredtoexperiencean
e�ectivewindspeedwhich,insomesense,isanaverageovertherotordisc.
Thehighfrequenciesofthee�ectivewindspeedexperiencedbytherotor
willbedampedcomparingwiththefrequenciesofthepointwindspeed.
Thissectionwillde�neamodeldescribingthebehaviourofthee�ective
turbulentwindspeedontherotor.Firstofall,apowerspectrum
forthe
pointwindspeedischosenandsimpli�ed.Secondly,by�lteringthepower
spectrumofthepointwindspeedwitha�lterfunction,thepowerspectral
densityfunctionforthee�ectivewindspeedexperiencedbytherotorcan
befound.Finally,alinearmodelwhichhasapproximatelythesamespec-
trumwillbeobtained.Inthisreporttheturbulentwindspeedisassumed
constantoverthewholerotor.
7.2.1
Thepointwindspeed
Themodelofthewindspeedatmeasurementpointis
v wind=v m+v p
(7.2)
wherev pistheturbulentpointwindspeed.
7.2
Windmodel
113
Theturbulentpointwindspeedisdescribedbypowerspectrumgivenby
[H�jstrup,1982]
f�Sp(f)
v2 �0
=
0:5fi
1+2:2f
5 3 i
�(hi�L
)2 3
+
105f ru
(1+33fru)5 3
�(1�h h
i)2
(1+15h h
i)2 3
(7.3)
f iandf ruarede�nedas
f i=
f�hi
v m
(7.4)
f ru=
f�hvm
1+15h h
i
(7.5)
ListofSymbol
v m
themeanwindspeed
[m/s]
v �0
frictionvelocity
[m/s]
h
measuringheight
[m]
hi
heightofconvectiveboundarylayer
[m]hi=1000m
L
Monon-Obukhovlength
[m]
f
frequency
f=
! 2�
[Hz]
Theabovespectrumconsistsoftwoparts.The�rstpartcorrespondstothe
thermalturbulence(lowfrequency)andthesecondpartcorrespondstothe
mechanicalturbulence(highfrequency).
Iftheverticaltemperaturegradientisabout�10oC=km,theairmasswill
neithermoveupnormovedown,thisiscalledneutralcondition.Ifthe
verticaltemperaturegradientislessthan�10oC=km,theairmasswill
moveup,itisanunstableatmosphere;Otherwiseitisastableatmosphere
ifthegradientismorethan�10oC=km.Theunstable,neutralandstable
conditionhappenabout6%,60%and34%oftime[Petersenetal.,1980].
Thereforewechoosetheneutralconditionforthemodel.Foraneutral

114
Chapter7.SimulationModeloftheWindTurbine
conditionthe�rstpartofthemodelcanbeneglected,whichmeansthatthe
highfrequencypartisdominant.Theabovefunctioncanthenbereduced
to
f�Sp(f)
v2 �0
=
105f ru
(1+33f ru)5 3
�(1�h h
i)2
(1+15h h
i)2 3
(7.6)
In[H�jstrup,1982],themodelvarianceisobtainedbyintegrationof(7.6)
overpositivefrequenciesonly
�2 p=
Z 1 0
Sp(f)df=
105
22
(1�h h
i)2
(1+15h h
i)
2 3
v2 �0
(7.7)
Accordingto[Larsenetal.,1992],foraneutralcondition
v �0v m
=
�
ln(h=r l)
(7.8)
where�isvonK�arm�anconstant(�0:4),histhemeasuringheight,r lis
theroughnesslength.Table7.1showsroughnessclassandcorresponding
roughnesslengthfordi�erentlandscapes[Petersenetal.,1980].Areason-
ablechoicefortheroughnesslengthisbetweenclass1and2.
Roughnessclass
Typeoflandscape
Roughnesslengthr l
0
Sea
1mm
1
Opencountry
1cm
2
Farmland
5cm
3
Smalltown
30cm
Table7.1.Roughnessclassandroughnesslengthfordi�erentlandscape
Bychoosingtheroughnesslengthproperly,itisthenpossibletoachieve
thespectraldensityfunctionandthevarianceofthepointwindspeedby
insertingthefrictionvelocityv �0into(7.6)and(7.7).Itcanbeeasilyfound
7.2
Windmodel
115
thatthespectrum
andvarianceofthepointwinddependontheaverage
windspeed.
7.2.2
Thewindexperiencedbytherotor
Itisimpossibletomeasurethewindspeedontherotor,sincethewind
speedvariesoverthediscsweptbytherotor.Thewindexperiencedbythe
rotorcanbeconsideredasanaverageofthespatialturbulence,whichwill
bemodelledbydynamically�lteringthepointwind
Sef(f)=Sp(f)F(f)
(7.9)
Thepowerspectrumofthe�lterisgivenby[Knudsen,1983]
F(f)=
1
(1+
8p�3
R vm
f)(1+4p�R v
m
f)
(7.10)
whereRisrotorradius.
7.2.3
Theapproximatede�ectivewindspeed
Forthepurposeofsimulation,alinearmodelforthee�ectivewindspeed
hastobederived.
Thepowerspectrumofthee�ectivewindspeedSef(f)canbeapproximated
bythepowerspectraldensityfunction
�v(!)=
k2
(1+p2 1!2)(1+p2 2!2)
�e(!)
=H(j!)�e(!)H(�j!)
(7.11)
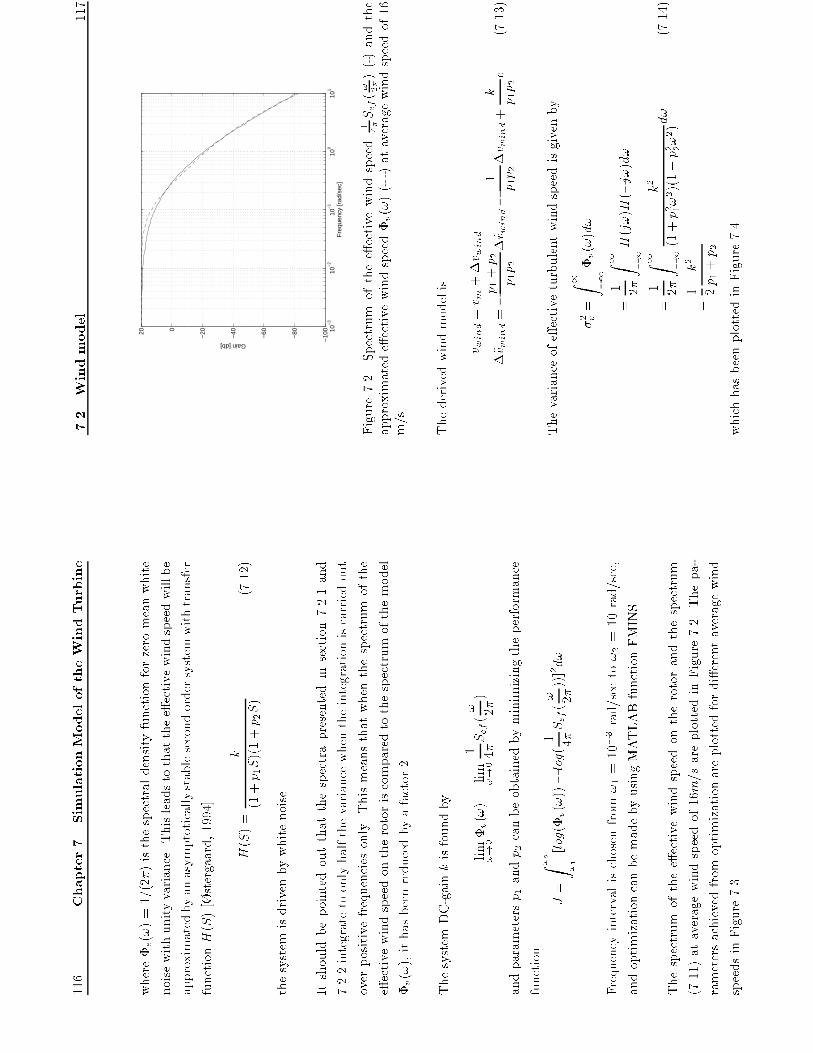
116
Chapter7.SimulationModeloftheWindTurbine
where�e(!)=1=(2�)isthespectraldensityfunctionforzeromeanwhite
noisewithunityvariance.Thisleadstothatthee�ectivewindspeedwillbe
approximatedbyanasymptoticallystablesecondordersystemwithtransfer
functionH(S)[�stergaard,1994]
H(S)=
k
(1+p1S)(1+p2S)
(7.12)
thesystemisdrivenbywhitenoise.
Itshouldbepointedoutthatthespectrapresentedinsection7.2.1and
7.2.2integratetoonlyhalfthevariancewhentheintegrationiscarriedout
overpositivefrequenciesonly.Thismeansthatwhenthespectrumofthe
e�ectivewindspeedontherotoriscomparedtothespectrumofthemodel
�v(!),ithasbeenreducedbyafactor2.
ThesystemDC-gainkisfoundby
lim!!0
�v(!)=lim!!0
1 4�Sef(
! 2�
)
andparametersp1andp2canbeobtainedbyminimizingtheperformance
function
J=
Z !2
!1
[log(�v(!))�log(
1 4�
Sef(
! 2�
))]2d!
Frequencyintervalischosenfrom!1=10�3rad/secto!2=10rad/sec,
andoptimizationcanbemadebyusingMATLABfunctionFMINS.
Thespectrum
ofthee�ectivewindspeedontherotorandthespectrum
(7.11)ataveragewindspeedof16m=sareplottedinFigure7.2.Thepa-
rametersachievedfromoptimizationareplottedfordi�erentaveragewind
speedsinFigure7.3.
7.2
Windmodel
117
10−
310
−2
10−
110
010
1−
100
−80
−60
−40
−20020
Fre
quen
cy [r
ad/s
ec]
Gain [db]
Figure7.2.Spectrum
ofthee�ectivewindspeed
1 4�Sef(! 2�)(-)andthe
approximatede�ectivewindspeed�v(!)(--)ataveragewindspeedof16
m/s
Thederivedwindmodelis
v wind=v m+�v wind
��v wind=�
p1+p2
p1p2
�_v wind�
1p1p2
�v wind+
kp1p2
e
(7.13)
Thevarianceofe�ectiveturbulentwindspeedisgivenby
�2 v=
Z 1 �1
�v(!)d!
=
1 2�
Z 1 �1
H(j!)H(�j!)d!
=
1 2�
Z 1 �1
k2
(1+p2 1!2)(1+p2 2!2)
d!
(7.14)
=1 2
k2
p1+p2
whichhasbeenplottedinFigure7.4.

118
Chapter7.SimulationModeloftheWindTurbine
510
1520
2530
051015 k
510
1520
2530
0204060 p1
510
1520
2530
0
0.51
1.5
Win
d S
peed
[m/s
]
p2
Figure7.3.Parametersk,p1andp2atdi�erentaveragewindspeed
51
01
52
02
53
00123456789
Win
d s
pe
ed
[m
/s]
Variance
Figure7.4.Variancesofthee�ectivewindspeedatdi�erentaveragewind
speeds
7.2
Windmodel
119
Thee�ectivewindspeedsexperiencedbytherotorataveragewindspeeds
of7m/sand16m/sareplottedinFigure7.5.Thewindsequencesare
obtainedfromthesimulations.
02
04
06
08
01
00
12
01
40
16
01
80
20
068
10
12
14
16
18
20
Tim
e [
s]
Wind speed [m/s]
Figure7.5.Simulatedwindattheaveragewindspeedof7m/s(dashed)
and16m/s(solid)
However,thee�ectivewindspeedexperiencedbytherotorhastobemod-
i�edbyincludingthecontributionfromthetowermotion,whichwillbe
explainedinthefollowingsections.
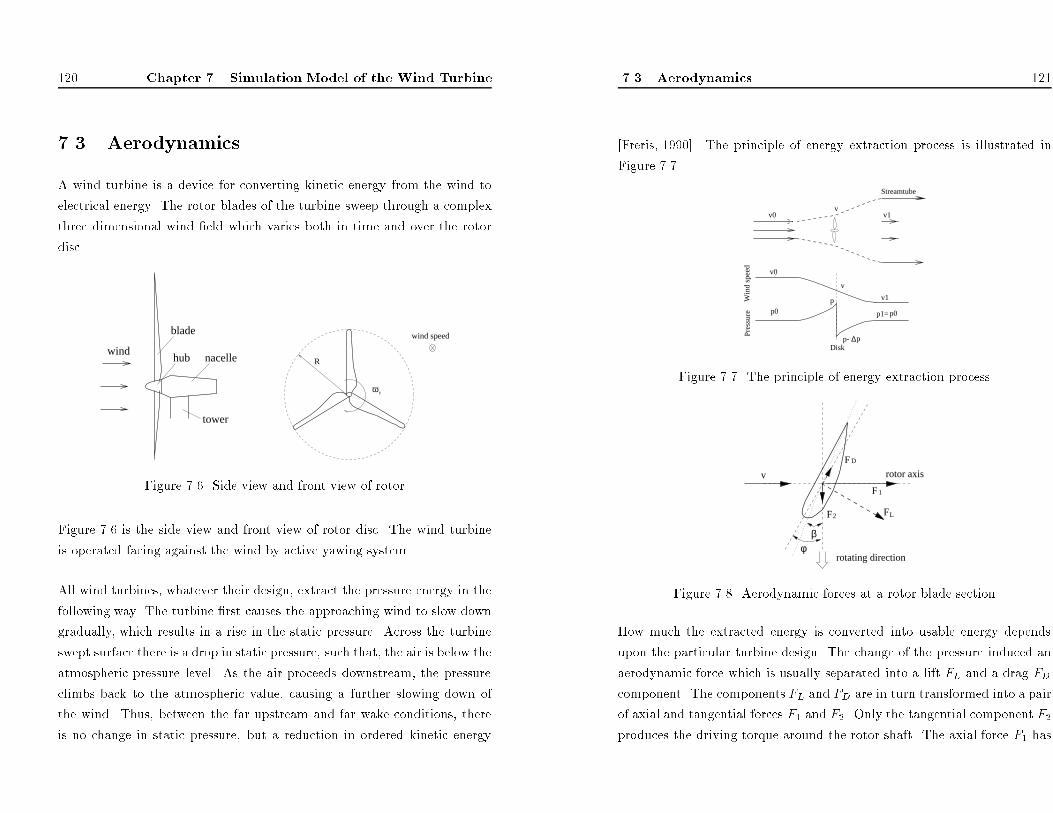
120 Chapter 7. Simulation Model of the Wind Turbine
7.3 Aerodynamics
A wind turbine is a device for converting kinetic energy from the wind to
electrical energy. The rotor blades of the turbine sweep through a complex
three dimensional wind �eld which varies both in time and over the rotor
disc.
tower
wind
blade
hub nacelle R
ω r
wind speed
Figure 7.6. Side view and front view of rotor
Figure 7.6 is the side view and front view of rotor disc. The wind turbine
is operated facing against the wind by active yawing system.
All wind turbines, whatever their design, extract the pressure energy in the
following way. The turbine �rst causes the approaching wind to slow down
gradually, which results in a rise in the static pressure. Across the turbine
swept surface there is a drop in static pressure, such that, the air is below the
atmospheric pressure level. As the air proceeds downstream, the pressure
climbs back to the atmospheric value, causing a further slowing down of
the wind. Thus, between the far upstream and far wake conditions, there
is no change in static pressure, but a reduction in ordered kinetic energy
7.3 Aerodynamics 121
[Freris, 1990]. The principle of energy extraction process is illustrated in
Figure 7.7.
Pre
ssur
e
vv0 v1
Streamtube
v0
v
Disk
p0 p0
p
p- ∆p
v1
p1=
Win
d sp
eed
Figure 7.7. The principle of energy extraction process
L
β
rotating direction
F
F
F
2
1
D
v
φ
rotor axis
F
Figure 7.8. Aerodynamic forces at a rotor blade section
How much the extracted energy is converted into usable energy depends
upon the particular turbine design. The change of the pressure induced an
aerodynamic force which is usually separated into a lift FL and a drag FD
component. The components FL and FD are in turn transformed into a pair
of axial and tangential forces F1 and F2. Only the tangential component F2
produces the driving torque around the rotor shaft. The axial force F1 has
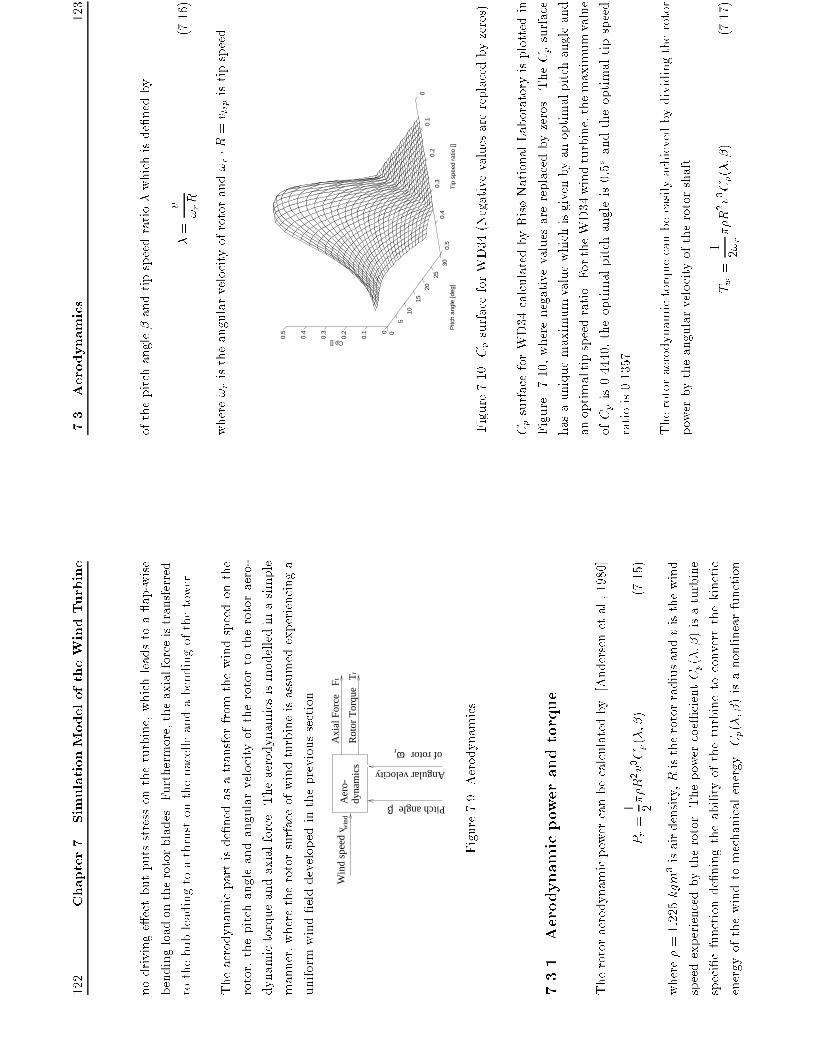
122
Chapter7.SimulationModeloftheWindTurbine
nodrivinge�ectbutputsstressontheturbine,whichleadstoa ap-wise
bendingloadontherotorblades.Furthermore,theaxialforceistransferred
tothehubleadingtoathrustonthenacelleandabendingofthetower.
Theaerodynamicpartisde�nedasatransferfromthewindspeedonthe
rotor,thepitchangleandangularvelocityoftherotortotherotoraero-
dynamictorqueandaxialforce.Theaerodynamicsismodelledinasimple
manner,wheretherotorsurfaceofwindturbineisassumedexperiencinga
uniformwind�elddevelopedintheprevioussection.
Aer
o-dy
nam
ics Angular velocity
of rotor
Pitch angleβ
win
dA
xial
For
ce
Ft
Rot
or T
orqu
eTr
ωr
Win
d sp
eed
v
Figure7.9.Aerodynamics
7.3.1
Aerodynamicpowerandtorque
Therotoraerodynamicpowercanbecalculatedby[Andersenetal.,1980]
Pr=
1 2��R2v3Cp(�;�)
(7.15)
where�=1:225kgm3isairdensity,Ristherotorradiusandvisthewind
speedexperiencedbytherotor.Thepowercoe�cientCp(�;�)isaturbine
speci�cfunctionde�ningtheabilityoftheturbinetoconvertthekinetic
energyofthewindtomechanicalenergy.Cp(�;�)isanonlinearfunction
7.3
Aerodynamics
123
ofthepitchangle�andtipspeedratio�whichisde�nedby
�=
v!rR
(7.16)
where!ristheangularvelocityofrotorand!r�R=v tipistipspeed.
00.
10.
20.
30.
40.
5
0
510
1520
2530
0
0.1
0.2
0.3
0.4
0.5
Pitc
h an
gle
[deg
]T
ip s
peed
rat
io []
Cp []
Figure7.10.CpsurfaceforWD34(Negativevaluesarereplacedbyzeros)
CpsurfaceforWD34calculatedbyRis�NationalLaboratoryisplottedin
Figure7.10,wherenegativevaluesarereplacedbyzeros.TheCpsurface
hasauniquemaximumvaluewhichisgivenbyanoptimalpitchangleand
anoptimaltipspeedratio.FortheWD34windturbine,themaximumvalue
ofCpis0.4440,theoptimalpitchangleis0:5oandtheoptimaltipspeed
ratiois0.1357.
Therotoraerodynamictorquecanbeeasilyachievedbydividingtherotor
powerbytheangularvelocityoftherotorshaft
Tw
=
12!r
��R
2v
3Cp(�;�)
(7.17)

124 Chapter 7. Simulation Model of the Wind Turbine
7.3.2 3p e�ect
As well as the disc averaged torque Tw, the rotor experiences various low
speed torque harmonic associated with the rotational frequency (nP) of the
blades. For a three bladed wind turbine, the most important disturbances
are 3P and 1P peaks with the 3P peak much more pronounced than the 1P
peak.
The spectral peaks are caused by the wind speed turbulence, the wind gra-
dient and shadow of the tower. The wind speed depends on the altitude
above ground, which causes the wind speed to be faster at top of the disc
swept by the rotor than at the lowest part. This is the gradient e�ect.
The tower shadow phenomenon is that when one of the blades sweeps in
front of the supporting tower, the torque induced on the blade will be re-
duced. [Leithead et al., 1992] indicates that the 1P peak is predominantly
deterministic and 3P peak is predominantly stochastic.
The 1P peak modelled by a simple sinusoid with amplitude A is given by
[Wilkie et al., 1990]
TnP = A sin(!rt) (7.18)
The 1P-e�ect is not included in the report.
A suitable model of the 3P peak is given by a lightly damped second order
function with white noise as input [Flensborg and S�rensen, 1995]
T3P (s)
e(s)
=
k3PTw(3!r)2
s2 + 2�(3!r)s+ (3!r)2
(7.19)
The spectrum of the model has a peak at 3!r. The amplitude k3P and
damping ratio � are determined empirically by comparing the model output
with the data sequences obtained from the existing WD34 wind turbine.
7.3 Aerodynamics 125
The total rotor torque experienced by the rotor is then modi�ed by
Tr = Tw + T3P (7.20)
7.3.3 Axial force
The force, induced by the wind on the rotor, causes the bending movement
of the tower in axial direction. The movement is depicted in Figure 7.11.
t
tv Fwind
ω t
h
Figure 7.11. The bending movement of the tower
!t in the �gure is the angular velocity of the bending movement and ht is
the height of the tower. The driving force Ft, assumed acting on the centre
of the rotor, is given by [Andersen et al., 1980]
Ft =1
2��R2v2Ct(�; �) (7.21)
where v is the e�ective wind speed experienced by the rotor, which di�ers
from the wind in front of the rotor due to the tower motion. Therefore v
has to be modi�ed by considering the contribution of the tower movement.
v = vwind � !tht (7.22)
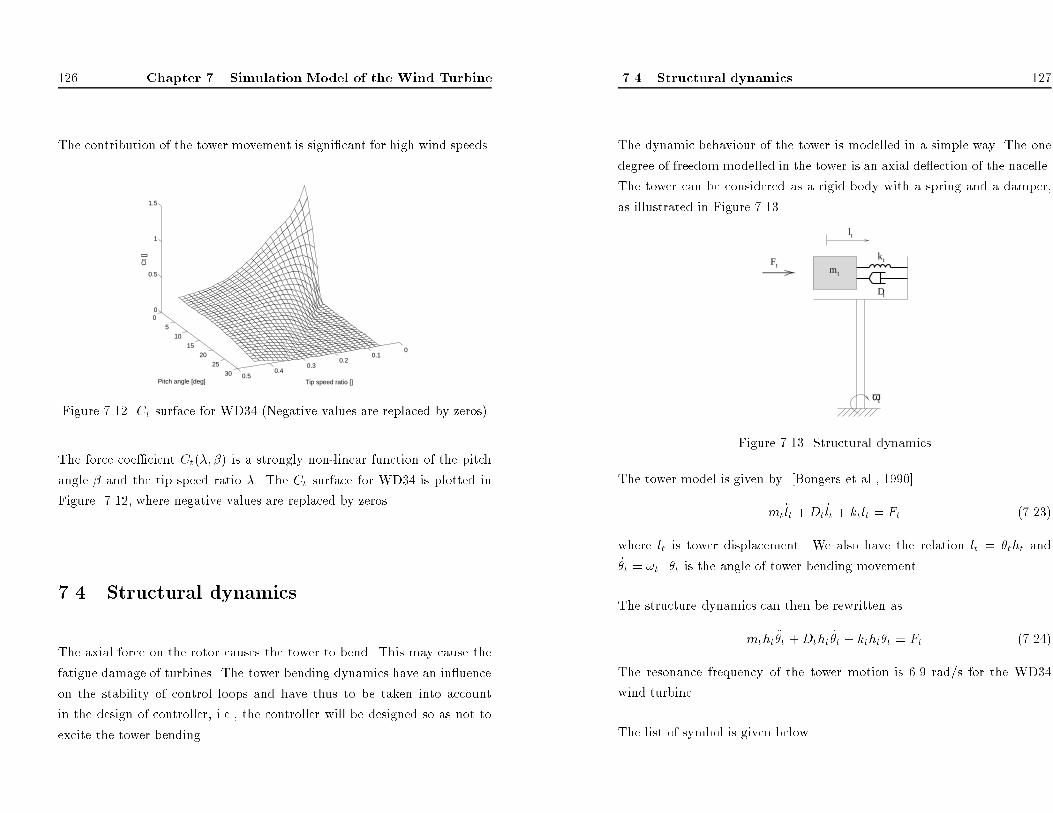
126 Chapter 7. Simulation Model of the Wind Turbine
The contribution of the tower movement is signi�cant for high wind speeds.
00.1
0.20.3
0.40.5
0
510
1520
2530
0
0.5
1
1.5
Pitch angle [deg] Tip speed ratio []
Ct [
]
Figure 7.12. Ct surface for WD34 (Negative values are replaced by zeros)
The force coe�cient Ct(�; �) is a strongly non-linear function of the pitch
angle � and the tip speed ratio �. The Ct surface for WD34 is plotted in
Figure 7.12, where negative values are replaced by zeros.
7.4 Structural dynamics
The axial force on the rotor causes the tower to bend. This may cause the
fatigue damage of turbines. The tower bending dynamics have an in uence
on the stability of control loops and have thus to be taken into account
in the design of controller, i.e., the controller will be designed so as not to
excite the tower bending.
7.4 Structural dynamics 127
The dynamic behaviour of the tower is modelled in a simple way. The one
degree of freedom modelled in the tower is an axial de ection of the nacelle.
The tower can be considered as a rigid body with a spring and a damper,
as illustrated in Figure 7.13
τ
Ftk
D
t
tl
t
mt
ω
Figure 7.13. Structural dynamics
The tower model is given by [Bongers et al., 1990]
mt�lt +Dt_lt + ktlt = Ft (7.23)
where lt is tower displacement. We also have the relation lt = �tht and
_�t = !t. �t is the angle of tower bending movement.
The structure dynamics can then be rewritten as
mtht��t +Dtht _�t + ktht�t = Ft (7.24)
The resonance frequency of the tower motion is 6.9 rad/s for the WD34
wind turbine.
The list of symbol is given below
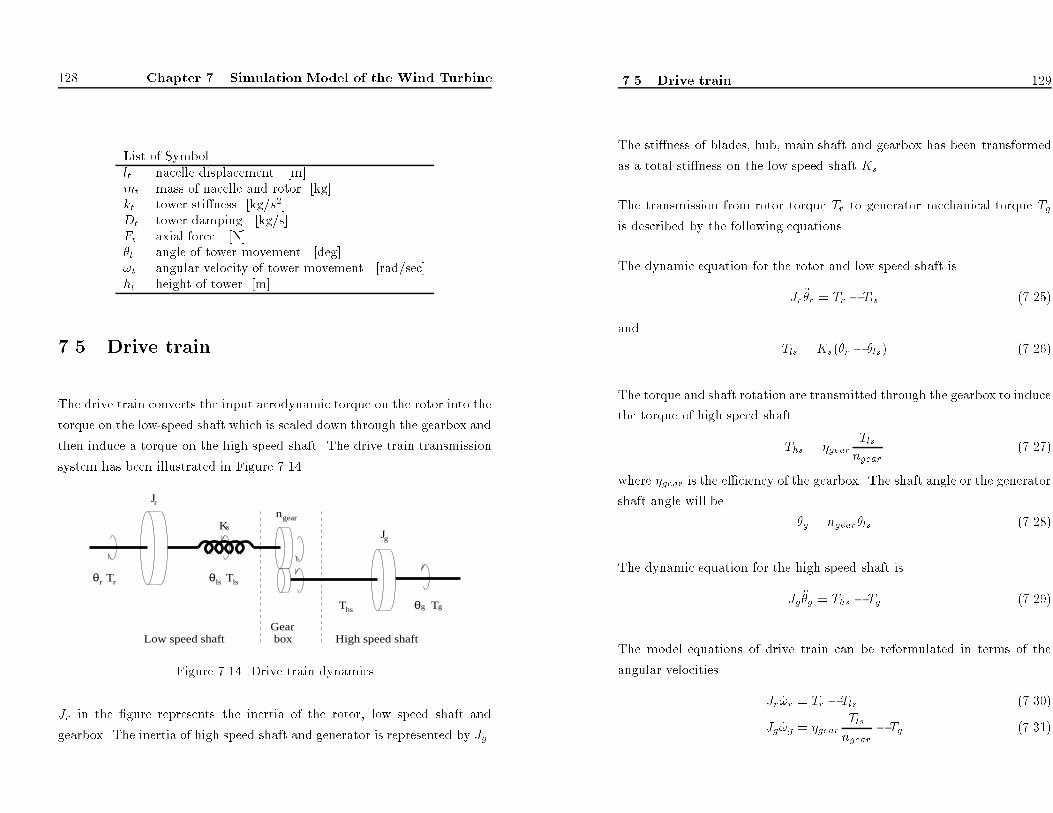
128 Chapter 7. Simulation Model of the Wind Turbine
List of Symbol
lt nacelle displacement [m]
mt mass of nacelle and rotor [kg]
kt tower sti�ness [kg/s2]
Dt tower damping [kg/s]
Ft axial force [N]
�t angle of tower movement [deg]
!t angular velocity of tower movement [rad/sec]
ht height of tower [m]
7.5 Drive train
The drive train converts the input aerodynamic torque on the rotor into the
torque on the low-speed shaft which is scaled down through the gearbox and
then induce a torque on the high speed shaft. The drive train transmission
system has been illustrated in Figure 7.14.
Jr
J
Low speed shaft High speed shaftGearbox
θ Tr r Tls
Ths
Ks
g Tgθ
θls
gearn
g
Figure 7.14. Drive train dynamics
Jr in the �gure represents the inertia of the rotor, low speed shaft and
gearbox. The inertia of high speed shaft and generator is represented by Jg .
7.5 Drive train 129
The sti�ness of blades, hub, main shaft and gearbox has been transformed
as a total sti�ness on the low speed shaft Ks.
The transmission from rotor torque Tr to generator mechanical torque Tg
is described by the following equations.
The dynamic equation for the rotor and low speed shaft is
Jr��r = Tr � Tls (7.25)
and
Tls = Ks(�r � �ls) (7.26)
The torque and shaft rotation are transmitted through the gearbox to induce
the torque of high speed shaftThs = �gear
Tls
ngear
(7.27)
where �gear is the e�ciency of the gearbox. The shaft angle or the generator
shaft angle will be
�g = ngear�ls (7.28)
The dynamic equation for the high speed shaft is
Jg ��g = Ths � Tg (7.29)
The model equations of drive train can be reformulated in terms of the
angular velocities
Jr _!r = Tr � Tls (7.30)
Jg _!g = �gearTls
ngear� Tg (7.31)
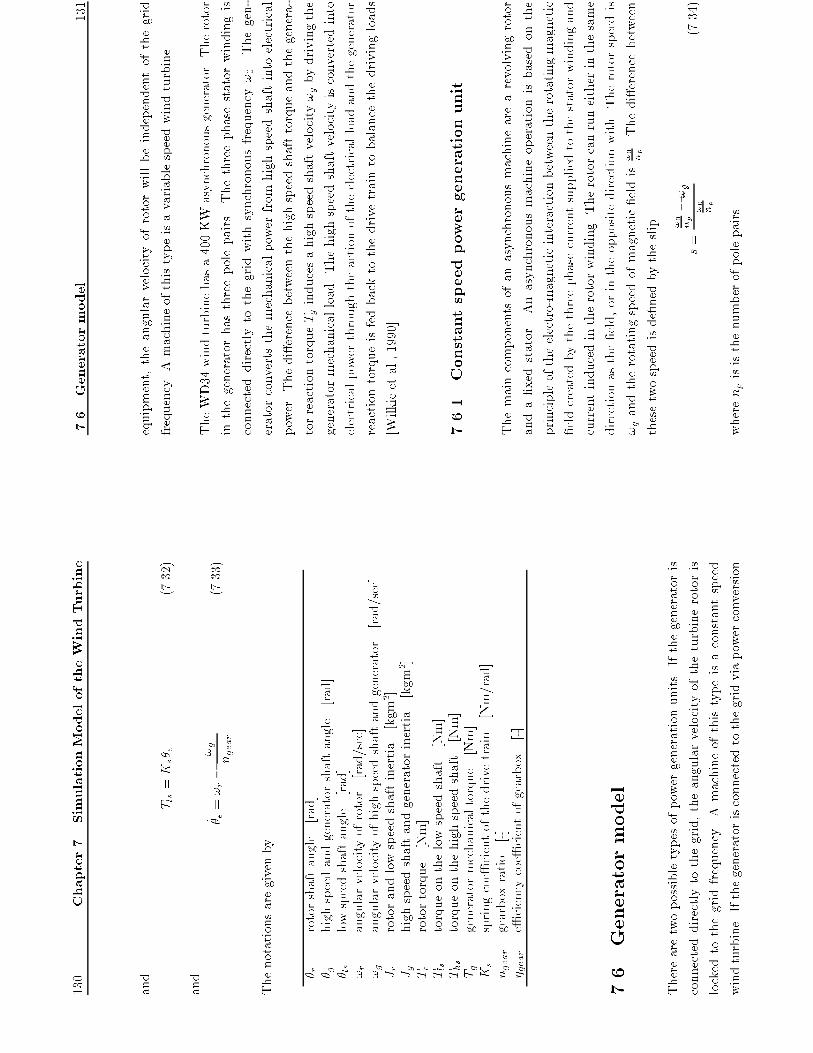
130
Chapter7.SimulationModeloftheWindTurbine
and
Tls=Ks� �
(7.32)
and
_ � �=!r�
!g
ngear
(7.33)
Thenotationsaregivenby
� r
rotorshaftangle
[rad]
� g
highspeedandgeneratorshaftangle
[rad]
� ls
lowspeedshaftangle
[rad]
!r
angularvelocityofrotor
[rad/sec]
!g
angularvelocityofhighspeedshaftandgenerator
[rad/sec]
Jr
rotorandlowspeedshaftinertia
[kgm2]
Jg
highspeedshaftandgeneratorinertia
[kgm2]
Tr
rotortorque
[Nm]
Tls
torqueonthelowspeedshaft
[Nm]
Ths
torqueonthehighspeedshaft
[Nm]
Tg
generatormechanicaltorque
[Nm]
Ks
springcoe�cientofthedrivetrain
[Nm/rad]
ngear
gearboxratio
[-]
�gear
e�ciencycoe�cientofgearbox
[-]
7.6
Generatormodel
Therearetwopossibletypesofpowergenerationunits.Ifthegeneratoris
connecteddirectlytothegrid,theangularvelocityoftheturbinerotoris
lockedtothegridfrequency.Amachineofthistypeisaconstantspeed
windturbine.Ifthegeneratorisconnectedtothegridviapowerconversion
7.6
Generatormodel
131
equipment,theangularvelocityofrotorwillbeindependentofthegrid
frequency.Amachineofthistypeisavariablespeedwindturbine.
TheWD34windturbinehasa400KW
asynchronousgenerator.Therotor
inthegeneratorhasthreepolepairs.Thethreephasestatorwindingis
connecteddirectlytothegridwithsynchronousfrequency!0.Thegen-
eratorconvertsthemechanicalpowerfromhighspeedshaftintoelectrical
power.Thedi�erencebetweenthehighspeedshafttorqueandthegenera-
torreactiontorqueTginducesahighspeedshaftvelocity!gbydrivingthe
generatormechanicalload.Thehighspeedshaftvelocityisconvertedinto
electricalpowerthroughtheactionoftheelectricalloadandthegenerator
reactiontorqueisfedbacktothedrivetraintobalancethedrivingloads
[Wilkieetal.,1990].
7.6.1
Constantspeedpowergenerationunit
Themaincomponentsofanasynchronousmachinearearevolvingrotor
anda�xedstator.Anasynchronousmachineoperationisbasedonthe
principleoftheelectro-magneticinteractionbetweentherotatingmagnetic
�eldcreatedbythethreephasecurrentsuppliedtothestatorwindingand
currentinducedintherotorwinding.Therotorcanruneitherinthesame
directionasthe�eld,orintheoppositedirectionwith.Therotorspeedis
!gandtherotatingspeedofmagnetic�eldis!0
np.Thedi�erencebetween
thesetwospeedisde�nedbytheslip
s=
!0
np
�!g
!0
np
(7.34)
wherenpisisthenumberofpolepairs.
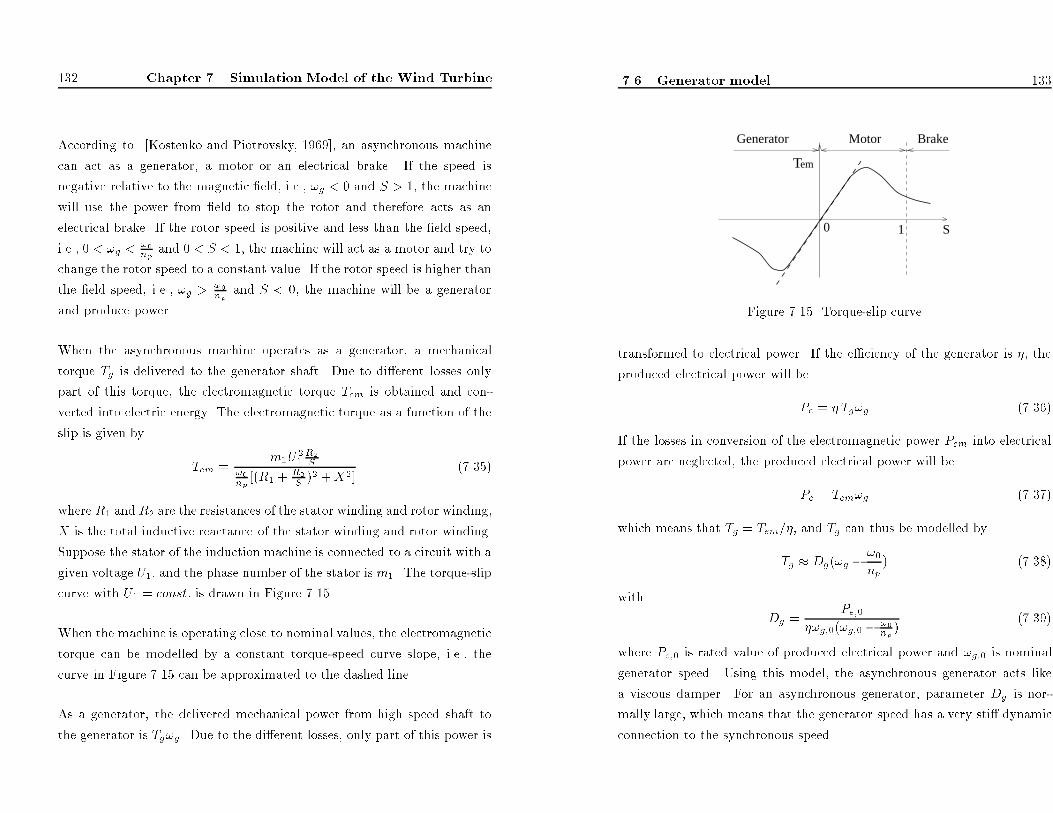
132 Chapter 7. Simulation Model of the Wind Turbine
According to [Kostenko and Piotrovsky, 1969], an asynchronous machine
can act as a generator, a motor or an electrical brake. If the speed is
negative relative to the magnetic �eld, i.e., !g < 0 and S > 1, the machine
will use the power from �eld to stop the rotor and therefore acts as an
electrical brake. If the rotor speed is positive and less than the �eld speed,
i.e., 0 < !g <!0npand 0 < S < 1, the machine will act as a motor and try to
change the rotor speed to a constant value. If the rotor speed is higher than
the �eld speed, i.e., !g >
!0np
and S < 0, the machine will be a generator
and produce power.
When the asynchronous machine operates as a generator, a mechanical
torque Tg is delivered to the generator shaft. Due to di�erent losses only
part of this torque, the electromagnetic torque Tem is obtained and con-
verted into electric energy. The electromagnetic torque as a function of the
slip is given by
Tem =
m1U21
R2S
!0np[(R1 +R2S
)2 +X2]
(7.35)
where R1 and R2 are the resistances of the stator winding and rotor winding,
X is the total inductive reactance of the stator winding and rotor winding.
Suppose the stator of the induction machine is connected to a circuit with a
given voltage U1, and the phase number of the stator is m1. The torque-slip
curve with U1 = const: is drawn in Figure 7.15.
When the machine is operating close to nominal values, the electromagnetic
torque can be modelled by a constant torque-speed curve slope, i.e., the
curve in Figure 7.15 can be approximated to the dashed line.
As a generator, the delivered mechanical power from high speed shaft to
the generator is Tg!g. Due to the di�erent losses, only part of this power is
7.6 Generator model 133
em
0 1 S
Motor BrakeGenerator
T
Figure 7.15. Torque-slip curve
transformed to electrical power. If the e�ciency of the generator is �, the
produced electrical power will bePe = � Tg!g (7.36)
If the losses in conversion of the electromagnetic power Pem into electrical
power are neglected, the produced electrical power will be
Pe = Tem!g (7.37)
which means that Tg = Tem=�, and Tg can thus be modelled by
Tg � Dg(!g � !0np
) (7.38)
with
Dg =
Pe;0
�!g;0(!g;0 � !0np)
(7.39)
where Pe;0 is rated value of produced electrical power and !g;0 is nominal
generator speed. Using this model, the asynchronous generator acts like
a viscous damper. For an asynchronous generator, parameter Dg is nor-
mally large, which means that the generator speed has a very sti� dynamic
connection to the synchronous speed.
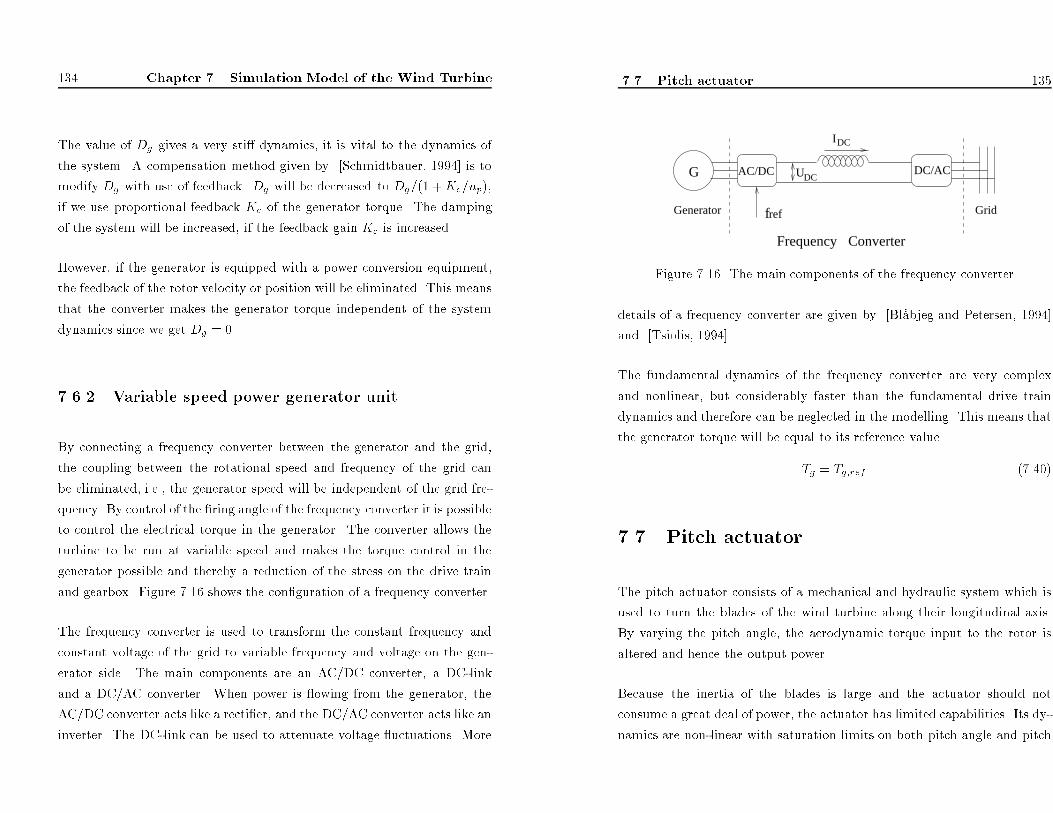
134 Chapter 7. Simulation Model of the Wind Turbine
The value of Dg gives a very sti� dynamics, it is vital to the dynamics of
the system. A compensation method given by [Schmidtbauer, 1994] is to
modify Dg with use of feedback. Dg will be decreased to Dg=(1 +Kc=np),
if we use proportional feedback Kc of the generator torque. The damping
of the system will be increased, if the feedback gain Kc is increased.
However, if the generator is equipped with a power conversion equipment,
the feedback of the rotor velocity or position will be eliminated. This means
that the converter makes the generator torque independent of the system
dynamics since we get Dg = 0.
7.6.2 Variable speed power generator unit
By connecting a frequency converter between the generator and the grid,
the coupling between the rotational speed and frequency of the grid can
be eliminated, i.e., the generator speed will be independent of the grid fre-
quency. By control of the �ring angle of the frequency converter it is possible
to control the electrical torque in the generator. The converter allows the
turbine to be run at variable speed and makes the torque control in the
generator possible and thereby a reduction of the stress on the drive train
and gearbox. Figure 7.16 shows the con�guration of a frequency converter.
The frequency converter is used to transform the constant frequency and
constant voltage of the grid to variable frequency and voltage on the gen-
erator side. The main components are an AC/DC converter, a DC-link
and a DC/AC converter. When power is owing from the generator, the
AC/DC converter acts like a recti�er, and the DC/AC converter acts like an
inverter. The DC-link can be used to attenuate voltage uctuations. More
7.7 Pitch actuator 135
Grid
DC
fref
G AC/DC DC/AC
Generator
ConverterFrequency
UDC
I
Figure 7.16. The main components of the frequency converter
details of a frequency converter are given by [Bl�abjeg and Petersen, 1994]
and [Tsiolis, 1994].
The fundamental dynamics of the frequency converter are very complex
and nonlinear, but considerably faster than the fundamental drive train
dynamics and therefore can be neglected in the modelling. This means that
the generator torque will be equal to its reference value
Tg = Tg;ref (7.40)
7.7 Pitch actuator
The pitch actuator consists of a mechanical and hydraulic system which is
used to turn the blades of the wind turbine along their longitudinal axis.
By varying the pitch angle, the aerodynamic torque input to the rotor is
altered and hence the output power.
Because the inertia of the blades is large and the actuator should not
consume a great deal of power, the actuator has limited capabilities. Its dy-
namics are non-linear with saturation limits on both pitch angle and pitch
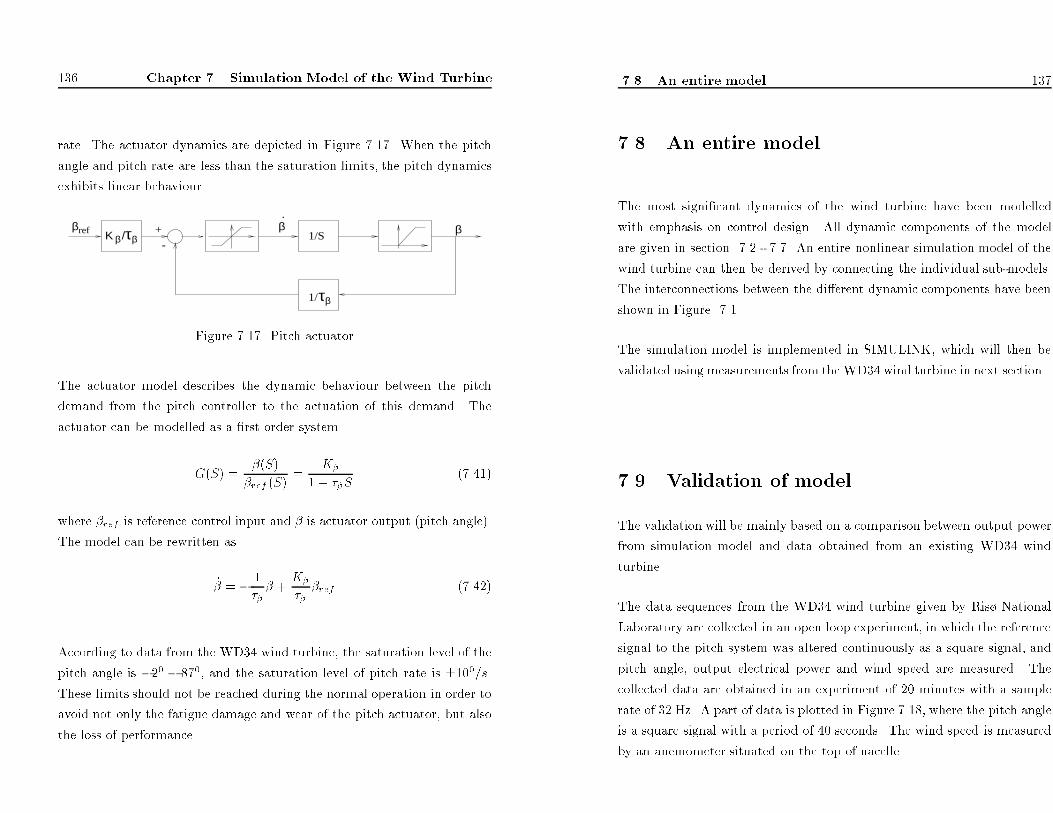
136 Chapter 7. Simulation Model of the Wind Turbine
rate. The actuator dynamics are depicted in Figure 7.17. When the pitch
angle and pitch rate are less than the saturation limits, the pitch dynamics
exhibits linear behaviour.
.
Κβ τβ/ +-
βref1/S
1/τβ
ββ
Figure 7.17. Pitch actuator
The actuator model describes the dynamic behaviour between the pitch
demand from the pitch controller to the actuation of this demand. The
actuator can be modelled as a �rst order system
G(S) =
�(S)
�ref (S)=
K�
1 + ��S
(7.41)
where �ref is reference control input and � is actuator output (pitch angle).
The model can be rewritten as_� = � 1��
� +K�
���ref (7.42)
According to data from the WD34 wind turbine, the saturation level of the
pitch angle is �20 � 870, and the saturation level of pitch rate is �100=s.
These limits should not be reached during the normal operation in order to
avoid not only the fatigue damage and wear of the pitch actuator, but also
the loss of performance.
7.8 An entire model 137
7.8 An entire model
The most signi�cant dynamics of the wind turbine have been modelled
with emphasis on control design. All dynamic components of the model
are given in section 7.2 - 7.7. An entire nonlinear simulation model of the
wind turbine can then be derived by connecting the individual sub-models.
The interconnections between the di�erent dynamic components have been
shown in Figure 7.1.
The simulation model is implemented in SIMULINK, which will then be
validated using measurements from the WD34 wind turbine in next section.
7.9 Validation of model
The validation will be mainly based on a comparison between output power
from simulation model and data obtained from an existing WD34 wind
turbine.
The data sequences from the WD34 wind turbine given by Ris� National
Laboratory are collected in an open loop experiment, in which the reference
signal to the pitch system was altered continuously as a square signal, and
pitch angle, output electrical power and wind speed are measured. The
collected data are obtained in an experiment of 20 minutes with a sample
rate of 32 Hz. A part of data is plotted in Figure 7.18, where the pitch angle
is a square signal with a period of 40 seconds. The wind speed is measured
by an anemometer situated on the top of nacelle.
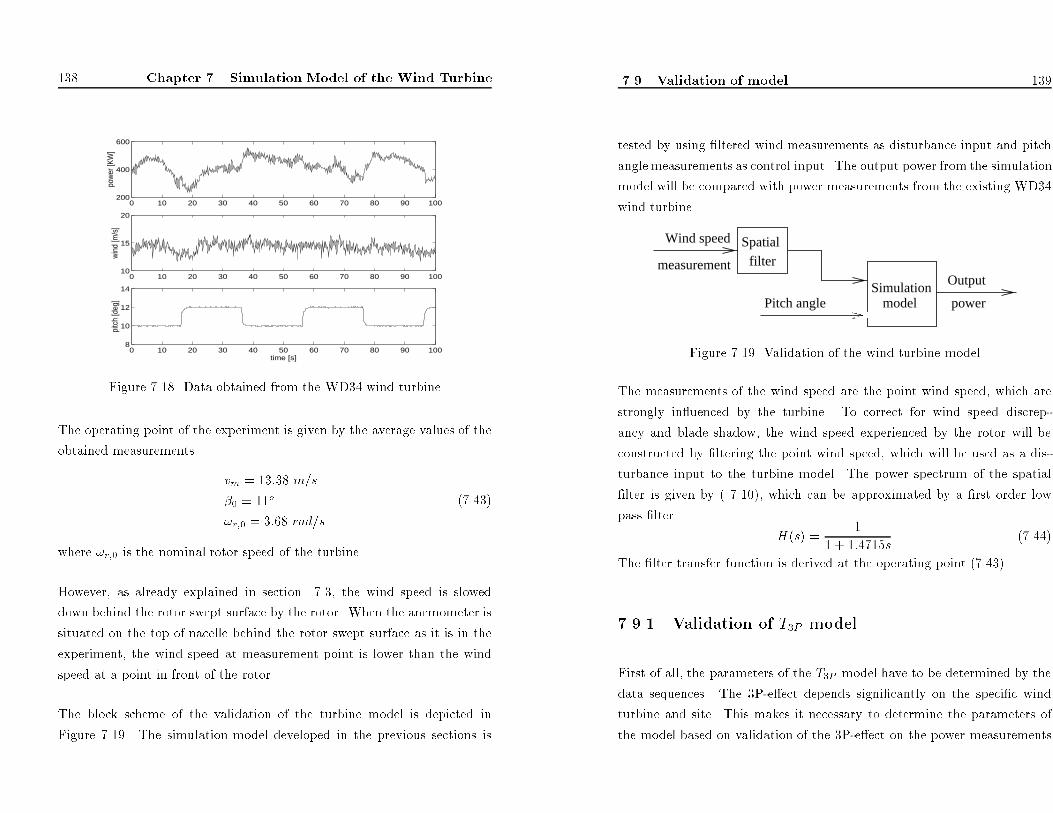
138 Chapter 7. Simulation Model of the Wind Turbine
0 10 20 30 40 50 60 70 80 90 100200
400
600
pow
er [K
W]
0 10 20 30 40 50 60 70 80 90 10010
15
20
win
d [m
/s]
0 10 20 30 40 50 60 70 80 90 1008
10
12
14
time [s]
pitc
h [d
eg]
Figure 7.18. Data obtained from the WD34 wind turbine
The operating point of the experiment is given by the average values of the
obtained measurements
vm = 13:38 m=s
�0 = 11o
!r;0 = 3:68 rad=s
(7.43)
where !r;0 is the nominal rotor speed of the turbine.
However, as already explained in section 7.3, the wind speed is slowed
down behind the rotor swept surface by the rotor. When the anemometer is
situated on the top of nacelle behind the rotor swept surface as it is in the
experiment, the wind speed at measurement point is lower than the wind
speed at a point in front of the rotor.
The block scheme of the validation of the turbine model is depicted in
Figure 7.19. The simulation model developed in the previous sections is
7.9 Validation of model 139
tested by using �ltered wind measurements as disturbance input and pitch
angle measurements as control input. The output power from the simulation
model will be compared with power measurements from the existing WD34
wind turbine.
measurement
Wind speed
powerPitch angle
Spatialfilter
Simulationmodel
Output
Figure 7.19. Validation of the wind turbine model
The measurements of the wind speed are the point wind speed, which are
strongly in uenced by the turbine. To correct for wind speed discrep-
ancy and blade shadow, the wind speed experienced by the rotor will be
constructed by �ltering the point wind speed, which will be used as a dis-
turbance input to the turbine model. The power spectrum of the spatial
�lter is given by ( 7.10), which can be approximated by a �rst order low
pass �lter
H(s) =
1
1 + 1:4715s
(7.44)
The �lter transfer function is derived at the operating point (7.43).
7.9.1 Validation of T3P model
First of all, the parameters of the T3P model have to be determined by the
data sequences. The 3P-e�ect depends signi�cantly on the speci�c wind
turbine and site. This makes it necessary to determine the parameters of
the model based on validation of the 3P-e�ect on the power measurements

140
Chapter7.SimulationModeloftheWindTurbine
fromtheturbine.ItcanbeshownbythepowermeasurementsinFigure
7.20thatthe3Pvariationsintheoutputpowerareabout10%ofthepower
output.
20
30
40
50
60
70
80
90
25
0
30
0
35
0
40
0
45
0
50
0
55
0
60
0
tim
e [s]
power [KW]
Figure7.20.PowermeasurementsoftheWD34windturbine
Theamplitudek3P
anddampingratio�inthemodel(7.19)willbedeter-
minedinsuchawaythattheamplitudeofvariationscausedby3Pe�ectwill
reach10%oftheoutputpower.Thek3P
and�aremutuallydependent.The
powerspectrumofthesimulationoutputandpowermeasurementsobtained
fromtheWD34turbinearegiveninFigure7.21.Thegoodagreementof
theresonancepeakfrequencieshasbeenshowninthe�gure.Theresonance
peakof3P-e�ectisat11rad/swhichisequalto3!r;0.
7.9.2
Validationresults
Theoutputelectricalpowersfromthesimulationmodelandtheexisting
WD34windturbineareshowninFigure7.22.Theaveragevalueofthe
powermeasurementsfromWD34is� PWD34=358:61KW.However,theav-
eragevalueofthesimulationoutputis� Pmodel=261:39KW.Thedi�erence
7.9
Validationofmodel
141
10
−1
10
01
01
10
21
0−
3
10
−2
10
−1
10
0
10
1
10
2
10
3
10
4
10
5
fre
qu
en
cy (
ra
d/s
ec)
SP
EC
TR
UM
ou
tpu
t #
1
Figure7.21.Powerspectrum
forpowermeasurementsfromWD34wind
turbine(solid)andsimulationmodel(dashed).
is�P=
� PWD34�� Pmodel=97:22KW.InFigure7.22theoutputpower
fromsimulationmodelissuperimposedbythedi�erence�P.
50
10
01
50
20
02
50
30
01
50
20
0
25
0
30
0
35
0
40
0
45
0
50
0
55
0
tim
e [
s]
power [KW]
Figure7.22.Outputpowerfromsimulationmodel(solid)andpowermea-
surementsfromtheWD34windturbine(dashed)
Thedi�erence�Piscausedbythelowerwindspeedusedasthedisturbance
inputtothesimulationmodel.Themeasurementsofthewindspeedislower
thanthewindspeedatapointjustinfrontofrotorbecauseofthein uence
oftheturbine.
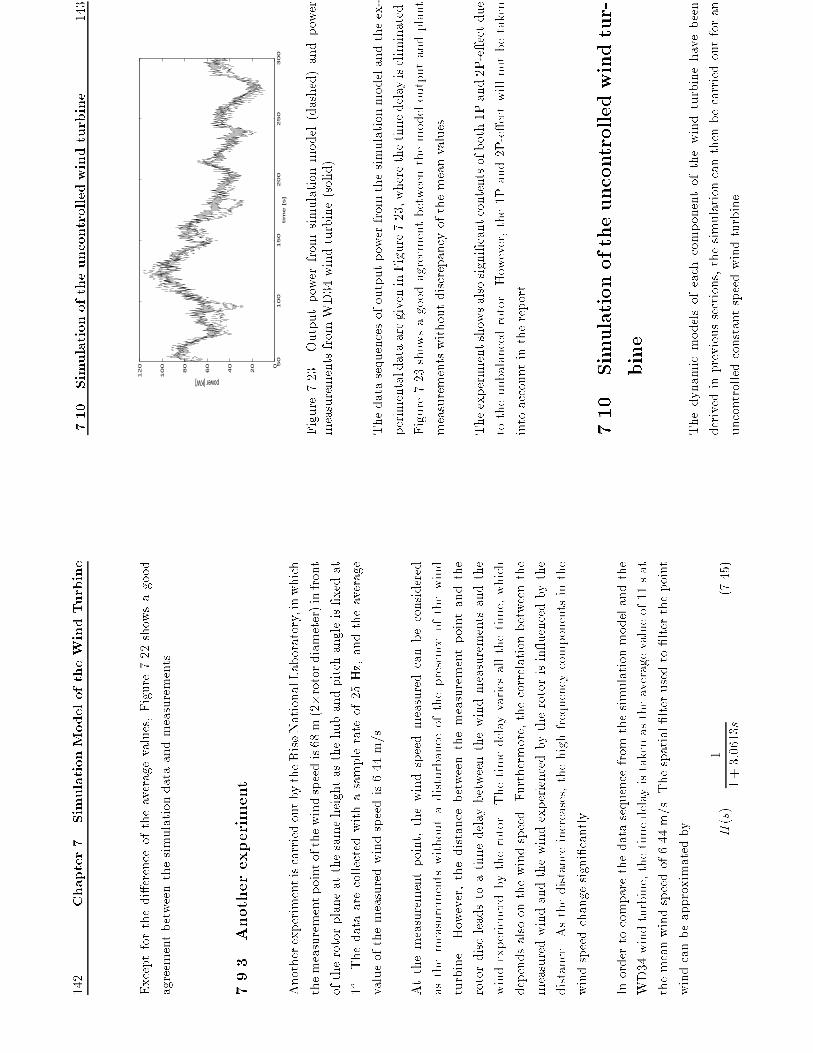
142
Chapter7.SimulationModeloftheWindTurbine
Exceptforthedi�erenceoftheaveragevalues,Figure7.22showsagood
agreementbetweenthesimulationdataandmeasurements.
7.9.3
Anotherexperiment
AnotherexperimentiscarriedoutbytheRis�NationalLaboratory,inwhich
themeasurementpointofthewindspeedis68m(2�rotordiameter)infront
oftherotorplaneatthesameheightasthehubandpitchangleis�xedat
1o.Thedataarecollectedwithasamplerateof25Hz,andtheaverage
valueofthemeasuredwindspeedis6.44m/s.
Atthemeasurementpoint,thewindspeedmeasuredcanbeconsidered
asthemeasurementswithoutadisturbanceofthepresenceofthewind
turbine.However,thedistancebetweenthemeasurementpointandthe
rotordiscleadstoatimedelaybetweenthewindmeasurementsandthe
windexperiencedbytherotor.Thetimedelayvariesallthetime,which
dependsalsoonthewindspeed.Furthermore,thecorrelationbetweenthe
measuredwindandthewindexperiencedbytherotorisin uencedbythe
distance.Asthedistanceincreases,thehighfrequencycomponentsinthe
windspeedchangesigni�cantly.
Inordertocomparethedatasequencefromthesimulationmodelandthe
WD34windturbine,thetimedelayistakenastheaveragevalueof11sat
themeanwindspeedof6.44m/s.Thespatial�lterusedto�lterthepoint
windcanbeapproximatedby
H(s)=
1
1+3:0613s
(7.45)
7.10
Simulationoftheuncontrolledwindturbine
143
50
10
01
50
20
02
50
30
00
20
40
60
80
10
0
12
0
tim
e [
s]
power [KW]
Figure7.23.Outputpowerfrom
simulationmodel(dashed)andpower
measurementsfromWD34windturbine(solid)
Thedatasequencesofoutputpowerfromthesimulationmodelandtheex-
perimentaldataaregiveninFigure7.23,wherethetimedelayiseliminated.
Figure7.23showsagoodagreementbetweenthemodeloutputandplant
measurementswithoutdiscrepancyofthemeanvalues.
Theexperimentshowsalsosigni�cantcontentsofboth1Pand2P-e�ectdue
totheunbalancedrotor.However,the1Pand2P-e�ectwillnotbetaken
intoaccountinthereport.
7.10
Simulationoftheuncontrolledwindtur-
bine
Thedynamicmodelsofeachcomponentofthewindturbinehavebeen
derivedinprevioussections,thesimulationcanthenbecarriedoutforan
uncontrolledconstantspeedwindturbine.
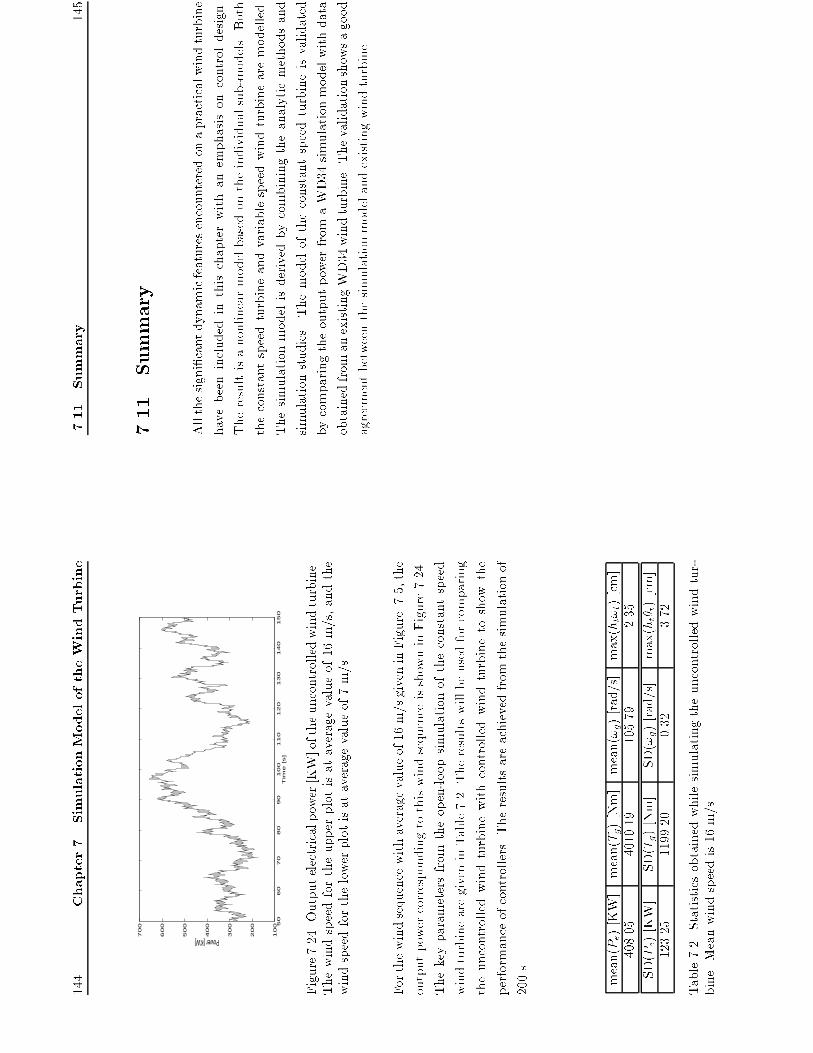
144
Chapter7.SimulationModeloftheWindTurbine
50
60
70
80
90
10
01
10
12
01
30
14
01
50
10
0
20
0
30
0
40
0
50
0
60
0
70
0
Tim
e [
s]
Power [KW]
Figure7.24.Outputelectricalpower[KW]oftheuncontrolledwindturbine.
Thewindspeedfortheupperplotisataveragevalueof16m/s,andthe
windspeedforthelowerplotisataveragevalueof7m/s.
Forthewindsequencewithaveragevalueof16m/sgiveninFigure7.5,the
outputpowercorrespondingtothiswindsequenceisshowninFigure7.24.
Thekeyparametersfromtheopen-loopsimulationoftheconstantspeed
windturbinearegiveninTable7.2.Theresultswillbeusedforcomparing
theuncontrolledwindturbinewithcontrolledwindturbinetoshowthe
performanceofcontrollers.Theresultsareachievedfromthesimulationof
200s.
mean(Pe)[KW]
mean(Tg)[Nm]
mean(!g)[rad/s]
max(ht!t)[cm]
408.05
4010.19
105.79
2.35
SD(Pe)[KW]
SD(Tg)[Nm]
SD(!g)[rad/s]
max(ht�t)[cm]
123.25
1199.20
0.32
3.72
Table7.2.Statisticsobtainedwhilesimulatingtheuncontrolledwindtur-
bine.Meanwindspeedis16m/s.
7.11
Summary
145
7.11
Summary
Allthesigni�cantdynamicfeaturesencounteredonapracticalwindturbine
havebeenincludedinthischapterwithanemphasisoncontroldesign.
Theresultisanonlinearmodelbasedontheindividualsub-models.Both
theconstantspeedturbineandvariablespeedwindturbinearemodelled.
Thesimulationmodelisderivedbycombiningtheanalyticmethodsand
simulationstudies.Themodeloftheconstantspeedturbineisvalidated
bycomparingtheoutputpowerfromaWD34simulationmodelwithdata
obtainedfromanexistingWD34windturbine.Thevalidationshowsagood
agreementbetweenthesimulationmodelandexistingwindturbine.
146
Chapter7.SimulationModeloftheWindTurbine
Chapter8
DesignModeloftheWind
Turbine
Anappropriatemodelofsystem
behaviouristheheartofcontroldesign.
Althoughanonlinearmodelisrequiredforthesimulation,asimplelinear
modelispreferredforcontroldesignpurpose.
Ane�ectivecontrolalgorithmmustre ecttheplantdynamiccharacteristics
aswellastheanticipatedworkingenvironment.Hence,thecontrolproblem
isconvenientlydividedintotwotimescalescorrespondingtoslowmean
windspeedchangesandrapidturbulentwindspeedvariations.Themean
speedsaretreatedassteadystateoperatingpoints.
147
148
Chapter8.DesignModeloftheWindTurbine
Thedesignmodelisthereforesplitintotwoparts:onepartdescribesthe
operatingpointandanotherpartdescribesthedynamicsofthesystembya
linearstate-spacemodel.Theoperatingpointdeterminestheoutputwhen
thesystemisatanequilibrium.Thelinearstate-spacemodeldescribesthe
deviationfromtheoperatingpointwhenthesystemisexcited.Thecontrol
modelcorrespondstoalinearizationabouttheoperatingpoint.
Tofacilitatecontrolsystemdesign,themodelsarerequiredtobeassimpleas
possiblewhileretainingallsigni�cantdynamiccomponentswhichinclude
theaerodynamics,theactuatordynamics,thedrivetrainandgenerator
dynamics.Thewindmodeland3P-e�ectwillalsobeincludedasnoise
models.Thestructuraldynamicsisnotincludedindesignmodels,since
ithasbeenshownbysimulationthatnosigni�cantimprovementcanbe
achievedbyincludingthetowermodel.However,bynotingpositionof
resonance,thetowermotionwillbesuppressedifitisnecessary.
Thischapterisorganizedasfollows.Section8.1givesalinearstate-space
modeloftheturbine,inwhichlinearmodelsofaerodynamictorque,drive
trainandgeneratordynamicswillbederived�rst.Thenthemodelsare
representedforbelowratedoperationandaboveratedoperationseparately.
Section
8.2describesthenoisemodelswhichincludethewindmodeland
T3P
model.Acompositemodelisgiveninsection8.3.Thesampleratesof
digitalcontrollerswillbediscussedinsection8.4,anddiscrete-timemodel
willbeformulated.Asummaryisgivenin8.5.
8.1
Linearstate-spacemodelsoftheplant
149
8.1
Linearstate-spacemodelsoftheplant
8.1.1
Aerodynamictorque
TheaerodynamictorqueTrgivenby(7.17)and(7.20)insection7.3.1is
anonlinearfunctionofthewindspeed,pitchangleandangularvelocityof
rotor
Tr=f(v;�;!r)
(8.1)
Thenonlinearaerodynamictorquecanbelinearizedaroundanoperating
point
Tr=Tw;0+�Tw+�T3P
(8.2)
where
�Tw
=
@Tw@v
� � � � op�v+
@Tw@�
� � � � op��+
@Tw
@!r
� � � � op�!r
(8.3)
and
�v=v�v m
��=���0
(8.4)
�!r=!r�!r;0
wherev m,�0
!r;0
andTw;0
de�neasteady-stateoperatingpoint.�v,
��,�!r,�Tw
and�T3P
areonlysmallchangesfrom
thesteady-state
operatingpoint.@Tw=@v,@Tw=@�and@Tw=@!rarethepartialderivatives
ofaerodynamictorquewithrespecttothewindspeed,pitchangleand
rotorspeedattheoperatingpointaboutwhichthesystem
islinearized.
ThederivativescanbecalculatedfromCpcurveaccordingtotheoperating

150
Chapter8.DesignModeloftheWindTurbine
point
@Tw@v
=
32!r
��R
2v
2Cp+
12!2 r��Rv
3@Cp
@�
@Tw@�
=
12!r
��R2v3@Cp
@�
(8.5)
@Tw
@!r
=�
12!2 r��R2v3Cp�
12!3 r��Rv4@Cp
@�
@Cp=@�and@Cp=@�canbenumericallycalculatedfromCpsurface.
8.1.2
Drivetrainandgenerator
Thedrivetraindynamicscanberepresentedby
�_ � �=�!r�
1ngear
�!g
�_!r=�
KsJr
�� �+
1 Jr
�Tr
(8.6)
�_!g=
�gearKs
ngearJg
�� ��
1 Jg
�Tg
Foraconstantspeedwindturbine,thegeneratorreactiontorqueismodelled
by�Tg=Dg�!g,anditisequaltogeneratortorquereferenceforavariable
speedwindturbine,i.e.,�Tg=�Tg;ref.
8.1.3
Abovetheratedwindspeed
AsalreadystatedinChapter6,whenthewindspeedexceedstherated
value,theobjectivesofthecontrolaretomaintainthepoweratitsrated
8.1
Linearstate-spacemodelsoftheplant
151
valueandpreventturbineoverloading.Bothconstantspeedandvariable
speedturbineareinvestigatedforthispurpose.
Sincethestructuraldynamicsisnotincludedindesignmodels,thewind
speedexperiencedbytherotorcanthenbeapproximatedby�v=�v wind.
Ifpitchsystem
dynamicsisincludedinthemodelandpitchreferenceis
takenasacontrolinput,astate-spacemodeloftheconstantspeedwind
turbinewillberepresented
2 6 6 6 6 4�_ � �
�_!r
�_!g
�_ �
3 7 7 7 7 5=2 6 6 6 6 40
1
�1ngear
0
�Ks
Jr
1 Jr
@Tw
@!r
0
1 Jr
@Tw
@�
�gearKs
ngearJg
0
�DgJg
0
0
0
0
�1 �
�
3 7 7 7 7 52 6 6 6 6 4�� �
�!r
�!g
��
3 7 7 7 7 5
+2 6 6 6 6 40 0 0 K
���
3 7 7 7 7 5��ref+
2 6 6 6 6 40
1 Jr
@Tw
@v
0 0
3 7 7 7 7 5�v wind+
2 6 6 6 6 40 1 Jr 0 0
3 7 7 7 7 5�T3P
(8.7)
Foraconstantspeedwindturbine,theoutputelectricalpowercanbeap-
proximatedbyPe=�Tg(1�S)!0
np,whereSistheslipde�nedby(7.34)at
operatingpoint,theoutputequationofthestate-spacemodelwillthenbe
�Pe=[00
�(1�S)!0
np
Dg
0]2 6 6 6 6 4�
� �
�!r
�!g
��
3 7 7 7 7 5
(8.8)
Avariablespeedwindturbinehastwoinputs,i.e.,thepitchreferenceand
generatortorquereference.Astate-spacemodelforavariablespeedturbine

152
Chapter8.DesignModeloftheWindTurbine
isde�nedby
2 6 6 6 6 4�_ � �
�_!r
�_!g
�_ �
3 7 7 7 7 5=2 6 6 6 6 40
1
�1ngear
0
�Ks
Jr
1 Jr
@Tw
@!r
0
1 Jr
@Tw
@�
�gearKs
ngearJg
0
0
0
0
0
0
�1 �
�
3 7 7 7 7 52 6 6 6 6 4�� �
�!r
�!g
��
3 7 7 7 7 5
+2 6 6 6 6 40
0
0
0
0
�1 J
g
K���
0
3 7 7 7 7 5" ��ref
�Tg;ref
# +2 6 6 6 6 40
1 Jr
@Tw
@v
0 0
3 7 7 7 7 5�v wind+
2 6 6 6 6 40 1 Jr 0 0
3 7 7 7 7 5�T3P
(8.9)
Forawindturbine,inadditiontopowermeasurement,ameasurementof
generatorshaftspeedmayalsobemade.Thegeneratortorquecaneasily
bederivedfromthesetwomeasurements.Theangularvelocityofgenerator
shaft!gandthegeneratorreactiontorquewillthenbechosenasoutputs
foravariablespeedwindturbine[LeitheadandConnor,1994].
" �!g
�Tg
# =" 0
0
1
0
0
0
0
0#2 6 6 6 6 4�� �
�!r
�!g
��
3 7 7 7 7 5+" 0
0
0
1#"��ref
�Tg;ref
#(8.10)
Ageneralizedrepresentationofthestate-spacemodeloftheplantisgiven
by
_xp
=
Apxp+Bpu+Lp1�v wind+Lp2�T3P
y
=
Cpxp+Dpu
(8.11)
wherexp
=[�� �;�!r;�!g;��]T,u=��ref,y=�PeandDP
=0fora
constantspeedplant,andu=[��ref;�Tg;ref]T,y=[�!g;�Tg]Tfora
variablespeedplant.
8.1
Linearstate-spacemodelsoftheplant
153
AbodediagramforaconstantspeedmodelisgiveninFigure8.1,where
theoperatingpointoftheturbineis
v m=16m=s
�0=12:34o
!r;0=3:68rad=s
Pe;0=400KW
(8.12)
10−
110
010
110
210
3−
100
−5005010
0
Fre
quen
cy (
rad/
sec)
Gain dB
10−
110
010
110
210
3
−18
00
180
Fre
quen
cy (
rad/
sec)
Phase deg
Figure8.1.Bodeplotforaconstantspeedwindturbinemodel:fromrefer-
encepitchangle��reftooutputelectricalpower�Pe.
Atthisoperatingpoint,theeigenvaluesoftheconstantspeedturbinemodel
aregiveninTable8.1.Theeigenvaluesofthedrivetraincausetheresonance
peakof6.13rad/sinthebodeplot.
Eigenvalue
subsystem
-1.3167�5.9913i
drivetrain
-169.2580
generator
-2.8571
actuator
Table8.1.Eigenvaluesforthemodelofaconstantspeedturbine
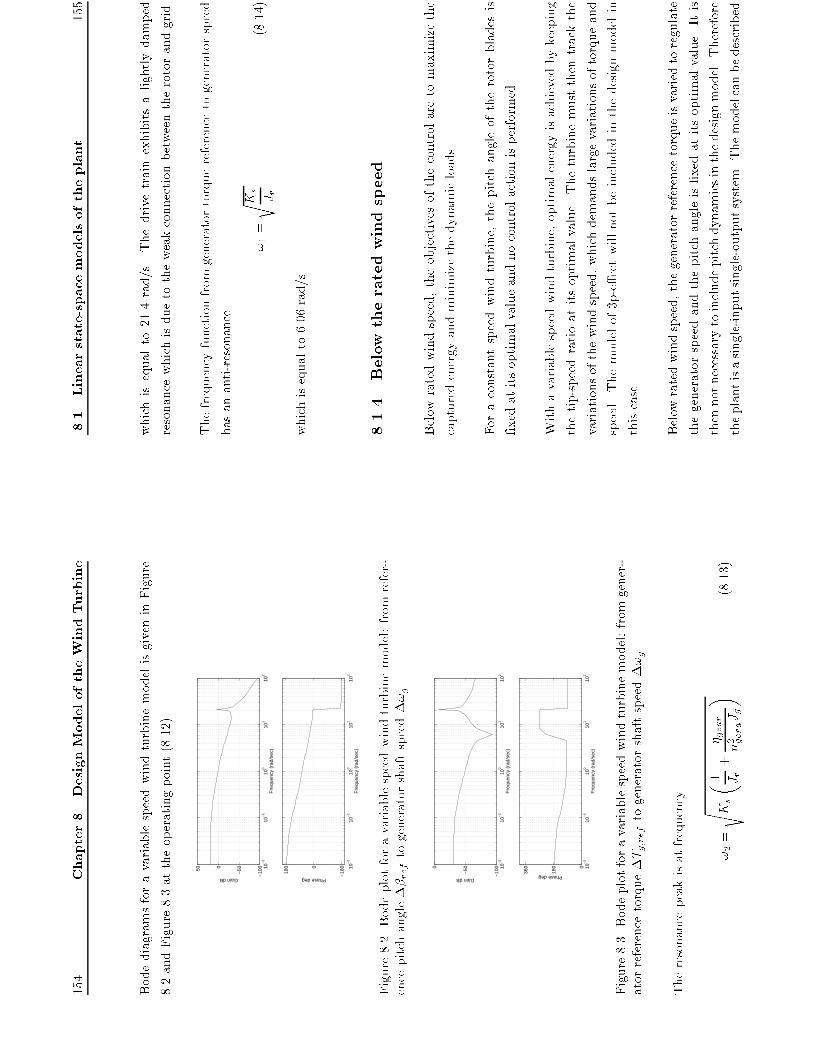
154
Chapter8.DesignModeloftheWindTurbine
BodediagramsforavariablespeedwindturbinemodelisgiveninFigure
8.2andFigure8.3attheoperatingpoint(8.12).
10−
210
−1
100
101
102
−10
0
−50050
Fre
quen
cy (
rad/
sec)
Gain dB
10−
210
−1
100
101
102
−18
00
180
Fre
quen
cy (
rad/
sec)
Phase deg
Figure8.2.Bodeplotforavariablespeedwindturbinemodel:fromrefer-
encepitchangle��reftogeneratorshaftspeed�!g.
10−
210
−1
100
101
102
−10
0
−500
Fre
quen
cy (
rad/
sec)
Gain dB
10−
210
−1
100
101
102
0
180
360
Fre
quen
cy (
rad/
sec)
Phase deg
Figure8.3.Bodeplotforavariablespeedwindturbinemodel:fromgener-
atorreferencetorque�Tg;reftogeneratorshaftspeed�!g.
Theresonancepeakisatfrequency
!2=
s Ks
� 1 Jr
+
�gear
n2 geraJg
�
(8.13)
8.1
Linearstate-spacemodelsoftheplant
155
whichisequalto21.4rad/s.Thedrivetrainexhibitsalightlydamped
resonancewhichisduetotheweakconnectionbetweentherotorandgrid.
Thefrequencyfunctionfromgeneratortorquereferencetogeneratorspeed
hasananti-resonance
!1=
r KsJr
(8.14)
whichisequalto6.06rad/s.
8.1.4
Below
theratedwindspeed
Belowratedwindspeed,theobjectivesofthecontrolaretomaximizethe
capturedenergyandminimizethedynamicloads.
Foraconstantspeedwindturbine,thepitchangleoftherotorbladesis
�xedatitsoptimalvalueandnocontrolactionisperformed.
Withavariablespeedwindturbine,optimalenergyisachievedbykeeping
thetip-speedratioatitsoptimalvalue.Theturbinemustthentrackthe
variationsofthewindspeed,whichdemandslargevariationsoftorqueand
speed.Themodelof3p-e�ectwillnotbeincludedinthedesignmodelin
thiscase.
Belowratedwindspeed,thegeneratorreferencetorqueisvariedtoregulate
thegeneratorspeedandthepitchangleis�xedatitsoptimalvalue.Itis
thennotnecessarytoincludepitchdynamicsinthedesignmodel.Therefore
theplantisasingle-inputsingle-outputsystem.Themodelcanbedescribed

156
Chapter8.DesignModeloftheWindTurbine
by
2 6 6 4�_ � �
�_!r
�_!g
3 7 7 5=2 6 6 40
1
�1ngear
�Ks
Jr
1 Jr
@Tw
@!r
0
�gearKs
ngearJg
0
0
3 7 7 52 6 6 4�� �
�!r
�!g
3 7 7 5
+2 6 6 40 0 �
1 Jg
3 7 7 5�Tg;ref+
2 6 6 40
1 Jr
@Tw
@v
0
3 7 7 5�v wind
(8.15)
andoutputequationsare
" �!g
�Tg
# =" 0
0
1
0
0
0#2 6 6 4�� �
�!r
�!g
3 7 7 5+" 0 1# �
Tg;ref
(8.16)
Themodelcanberepresentedby(8.11)withxp
=
[�� �;�!r;�!g]T,
u=�Tg;ref,y=[�!g;�Tg]TandLp2=0.
10−
310
−2
10−
110
010
110
2−
100
−500
Fre
quen
cy (
rad/
sec)
Gain dB
10−
310
−2
10−
110
010
110
20
180
360
Fre
quen
cy (
rad/
sec)
Phase deg
Figure8.4.Bodeplotforavariablespeedwindturbinemodel:fromgener-
atorreferencetorque�Tg;reftogeneratorshaftspeed�!g.
8.2
Noisemodels
157
Bodediagramisgivenforafrequencyfunctionfromgeneratortorqueref-
erencetogeneratorspeedinFigure8.4atanoperatingpoint
v m=7m=s
�opt=0:5o
!r;0=3:04rad=s
(8.17)
8.2
Noisemodels
Thewindmodelcanberepresentedbyasecondorderstate-spacemodel
" �_v wind
��v wind
# ="0
1
�1p1p2
�p1
+p2
p1p2
#"�v wind
�_v wind
# +"0 k
p1p2
# e w
�v wind=[10]" �
v wind
�_v wind
#
(8.18)
wheree wisazeromeanwhitenoisewithunitvariance.Ifthestateis
chosenasxw
=[�v wind�_v wind]T,theabovemodelcanbewrittenasa
noisemodel
_xw
=
Awxw
+Bwe w
�v wind
=
Cwxw
(8.19)
Inadesignmodelof3P-e�ect,theangularvelocityofrotorandrotortorque
shouldbeconsideredconstant,i.e.,!r=!r;0andTw
=Tw;0
�T3P(s)
e 3P(s)
=
k3PTw;0(3!r;0)2
s2+2�(3!r;0)s+(3!r;0)2
(8.20)
the3P-e�ectwillthenbemodelledbystate-spaceequations
" �_ T3P
�� T3P
# ="
0
1
�
(3!r;0)2
�
2�(3!r;0)
#"�T3P
�_ T3P
# +"
0
k3PTw;0(3!r;0)2
# e3P
158
Chapter8.DesignModeloftheWindTurbine
�T3P
=[10]" �
T3P
�_ T3P
#
(8.21)
whichinturncanberepresentedby
_x3P
=
A3Px3P
+B3Pe 3P
�T3P
=
C3Px3P
(8.22)
wheree 3P
isazeromeanwhitenoisewithunitvariance,anditisuncor-
relatedwithnoisesequencee w.The�T3P
modelcanonlybeincluded
inthedesignmodel,whentheangularvelocityofrotorcanbeconsidered
constant.Sincetherearesubstantialvariationsintherotorspeedwhena
variablespeedwindturbineisemployedbelowtheratedwindspeed,the
�T3P
modelwillnotbeincludedinthedesignmodelinthiscase.
8.3
A
compositemodel
Acompositemodelcanbebuiltinwhichtheplantmodel(8.11)andnoise
models(8.19)and(8.22)areuni�edintoonesinglestate-spacemodel
2 6 4_xp(t)
_xw(t)
_x3P(t)
3 7 5=2 6 4A
p
Lp1Cw
Lp2C3P
0
Aw
0
0
0
A3P
3 7 52 6 4xp(t)
xw(t)
x3P(t)
3 7 5
+2 6 4B
p 0 0
3 7 5u(t)+
2 6 40
0
Bw
0
0
B3P
3 7 5" ew(t)
e3P(t)
#(8.23)
y(t)=[Cp
0
0]2 6 4x
p(t)
xw(t)
x3P(t)
3 7 5+Dpu(t)
8.4
Discretetimemodel
159
Belowtheratedwindspeed,themodelof3P-e�ectwillbeomittedinthe
designmodel.
Ifwechoosex(t)=[xp(t)xw(t)x3P(t)]T
ande(t)=[ew(t)e 3P(t)]T,the
compositemodelcanberewrittenas
_x(t)
=
Acx(t)+Bcu(t)+Lce(t)
y(t)
=
Ccx(t)+Dcu(t)
(8.24)
Themainadvantageofstate-spacemodelisthataprioriknowledgeabout
thesysteminanaturalwaycanbeincludedinthemodel.Sincewehavea
well-knownphysicalstructureandphysicalmodelofthedrivetrainsystem,
themodelshouldbewellsuitedforthecontrollerdesignpurpose.
8.4
Discretetimemodel
Adigitalcontrollerisnormallyimplemented,whichsamplestheplantout-
putandcalculatesacontrolinputwhichis�xedduringthesampleperiod.
Inthissectionthesampleratewillbediscussedandthediscrete-timemodel
willbeformulated.
Generally,theperformanceofadigitalcontrollerimproveswithincreasing
samplerate,butcostmayalsobeincreasedwithfastersampling.The
selectionofthebestsamplerateforadigitalcontrolsystemisacompromise.
Thesamplingtheoremstatesthatinordertoreconstructanunknownband-
limitedcontinuoussignalfromsamplesofthatsignal,thesampleratemust
beatleasttwiceasfastasthehighestfrequencycontainedintheunknown
signal.Inpractice,thesignalwillneverbebandlimited,however,some
160
Chapter8.DesignModeloftheWindTurbine
frequencycontentsofthesignalcanbeconsideredinsigni�cantabovea
certainfrequency.
Basedonthesamplingtheorem,thesampleratedenotedbyf smustbeat
leasttwicetherequiredclosed-loopbandwidthofthesystemf b,i.e.,
f s f b>2
(8.25)
Thisisafundamentallowerboundonthesamplerate.
However,[Franklinetal.,1990]indicatesthatthetheoreticallowerbound
wouldbejudgedfartooslowforanacceptabletimeresponse.Hesuggests
thatthedesiredsamplingrateshouldbe
6�
f s f b�40
(8.26)
FortheconstantspeedWD34windturbine,thedrivetrainresonancefre-
quencyof6.13rad/s(�1Hz)isdominatedfrequency,asamplerateof10
HzinthecurrentusedPI-controllerhasbeenchosenbyVestas.Thissample
ratedwillalsobeusedinLQGcontrollerfortheconstantspeedpitchcon-
trolledwindturbineinordertomakeanunbiasedcomparison.However,for
avariablespeedpitchcontrolledwindturbine,duetoaverylightlydamped
resonanceatfrequencyof21.4rad/s(3.4Hz),asamplerateof33.33Hz(the
sampletimeis0.03s)ischosentoattenuatethedrivetrainresonance.
Thenacontinuousmodelcanbetransformedtoadiscrete-timemodel
x(t+1)
=
Adx(t)+Bdu(t)+w(t)
y(t)
=
Cdx(t)+Ddu(t)
(8.27)
8.5
Summary
161
8.5
Summary
Thedesignmodelsforwindturbineshavebeenderivedinthischapter.In
thecaseoffullload,modelsforaconstantspeedturbineandavariable
speedturbineareformulatedseparately.Inpartialload,onlyavariable
speedturbinewith�xedpitchismodelled.Boththewindmodelandthe
3P-e�ectareconsideredasnoisemodels.TheT3P
modelisincludedonlyin
fullload,inwhichtherearenotsigni�cantvariationsintherotorspeed.The
sampleratesfordigitalcontrolsystemsaredeterminedandageneralized
discrete-timestate-spacemodelisderived.
162
Chapter8.DesignModeloftheWindTurbine
Chapter9
EstimationofTheWind
Speed
Usingawindturbineforproductionofelectricalenergyrequiresreliableand
e�ectiveoperation,anactivecontrolsystemisoftenconsideredtorealizeit.
Somecontrolmethodsrequiretheknowledgeofthewindspeedexperienced
bytheturbine.Sincethenonlinearityoftheprocessfromtheaerodynamics
oftheturbinedependssigni�cantlyonthewindspeed,itseemsthatthe
windspeedisvitaltothebehaviourofclosed-loopsystem.
Althoughthereisnosuchthingasthewindspeedexperiencedbyawind
turbine,sincetherotorissubjecttoaspatiallydistributedwind�eldwhich
variesintime,theturbinemaybeconsideredtoexperienceane�ectivewind
speedwhichinsomesenseisanaverageovertherotordisc.Thismakes
163

164 Chapter 9. Estimation of The Wind Speed
a direct measurement of e�ective wind speed impossible. However, it is
also impossible to predict the true wind speed passing through the rotor
disc by measuring it by an anemometer, because the discrepancy between
the measured wind speed and true speed on the rotor is considerably large.
Even if it were possible, the presence of the turbine disturbs the wind speed
and the measurement would need to be made at separate site where the
wind speed correlated almost exactly with the wind speed experienced by
the turbine. Hence direct measurement of wind speed is of limited value
in regulating the wind turbine [Leithead et al., 1990]. The idea is then to
estimate the e�ective wind speed experienced by the rotor by using a wind
turbine as a wind measuring device.
Below the rated wind speed, the wind turbine will be adjusted to capture
as much as possible of the energy from the wind. If a tracking controller is
employed to keep the wind turbine running at optimal tip speed ratio where
the turbine can achieve maximumpower, the estimated wind speed is often
used to determine the optimal control action. In this case the accurate
estimated wind speed is a prerequisite for an appropriate control system
design. Above the rated wind speed, a controller can be used to smooth the
power generated by the wind turbine. If a gain scheduled LQG controller is
applied to compensate for nonlinearities of the process, the estimated wind
speed is often chosen as a scheduling variable to determine the operating
point where the controller can be calibrated each sample.
An input and output signal from the turbine are required by an estimator,
no matter which estimation method is used, see Figure 9.1. The plant
considered here is aWD34 constant speed wind turbine with PI pitch control
above rated wind speed and �xed pitch angle below rated wind speed. The
9.1 The Newton-Raphson method 165
v
Plant
Estimator
u y
^
Figure 9.1. Block scheme of estimator
input signal of the turbine is pitch demand and the output measurement is
electrical power.
In the following sections the Newton-Raphson method, Kalman �lter method
and extended Kalman �lter method will be developed for wind speed esti-
mation based on the model of the wind turbine. The performance of the
algorithms will be investigated by simulations. An identical wind sequence
is used for all simulations. Afterwards, some experimental data are used to
test the estimation approaches. An interesting discussion concerning wind
speed estimation is given at the end of chapter.
9.1 The Newton-Raphson method
The Newton type methods have been given in Appendix A. The reason to
use the Newton-Raphson method is that the method has particularly fast
convergence properties in most cases
[Dennis and Schnabel, 1983].
166
Chapter9.EstimationofTheWindSpeed
ThewindspeedestimatorisachievedbyminimizingacostfunctionJ(t;v)
^v(t)=argmin vJ(t;v)
(9.1)
andthecostfunctionisgivenby
J(t;v)=(Pr(t)�f(v))
2
(9.2)
wherePr(t)isameasurementofrotorpowerattimet,whichisassumed
thattobeknown,andf(v)isgivenby
f(v)=
1 2��R2v3Cp(�;�)
(9.3)
Theproblemisequivalentto�ndingthesolutionto(9.4)[Poulsen,1985]
I(t;v)=Pr(t)�
1 2��R2v3Cp(�;�)=0
(9.4)
Theiterationformoftheestimatoris
�v n+1=�v n�H�1n
g n
(9.5)
where�v nistheresultofniterations,Hnandg ncanbeobtainedby
g n=I(t;v)j �vn
=Pr(t)�
1 2��R2�v3 nCp(� �n;�)
(9.6)
Hn=r vI(t;v)j �vn
=� �3 2��R2v2Cp(�;�)�
1 2��R2v3@Cp
@v
� �vn
(9.7)
where
@Cp
@v
=@Cp
@�
@�
@v
=
1!rR
@Cp
@�
(9.8)
@Cp=@�canbecalculatedfromCpcurve.Byinserting(9.8)into(9.7),the
Hnis
Hn=�
3 2��R
2�v2 nCp(� �n;�)�
12!r
��R�v3 n
@Cp
@� �n
(9.9)
9.1
TheNewton-Raphsonmethod
167
where
� �n=
�v n !rR
(9.10)
Atsampletimet,themeasurementisPr(t),theiterationwillstartfrom
�v 0=^v(t�1)andcontinueuntil
I(t;�v nstop)=(Pr(t)�f(�vnstop))<c
(9.11)
wherethevalueofcissmall.
Theestimateofwindspeedattimetis
^v(t)=�v nstop
(9.12)
ThepreconditiontousetheNewton-Raphsonmethodforestimatingthe
windspeedisthemeasurablerotorpowerP(t).However,thiscondition
cannotbeful�lled.Therotorpowerhasthentobeapproximatedbythe
staticrelation
Pr=
Pe
�gear��
(9.13)
where�gear��isthecoe�cientoftheenergylossinthesystem.
Thesimulationsarecarriedoutataveragewindspeedof16m/s(above
rated)and7m/s(belowrated).Foraboveratedoperation,thewindturbine
ispitchregulatedtolimitthepoweroutput.Forbelowratedoperation,
thepitchangleoftherotorbladesis�xedat1oandnocontrolactionis
performed.Inbothcasesthepowermeasurementandpitchdemandare
takenasinputstotheestimator.
Thee�ectivewindspeedandestimatedwindspeed,aswellastheestimation
erroraregiveninFigure9.2ataveragewindspeedof16m/sandFigure9.3
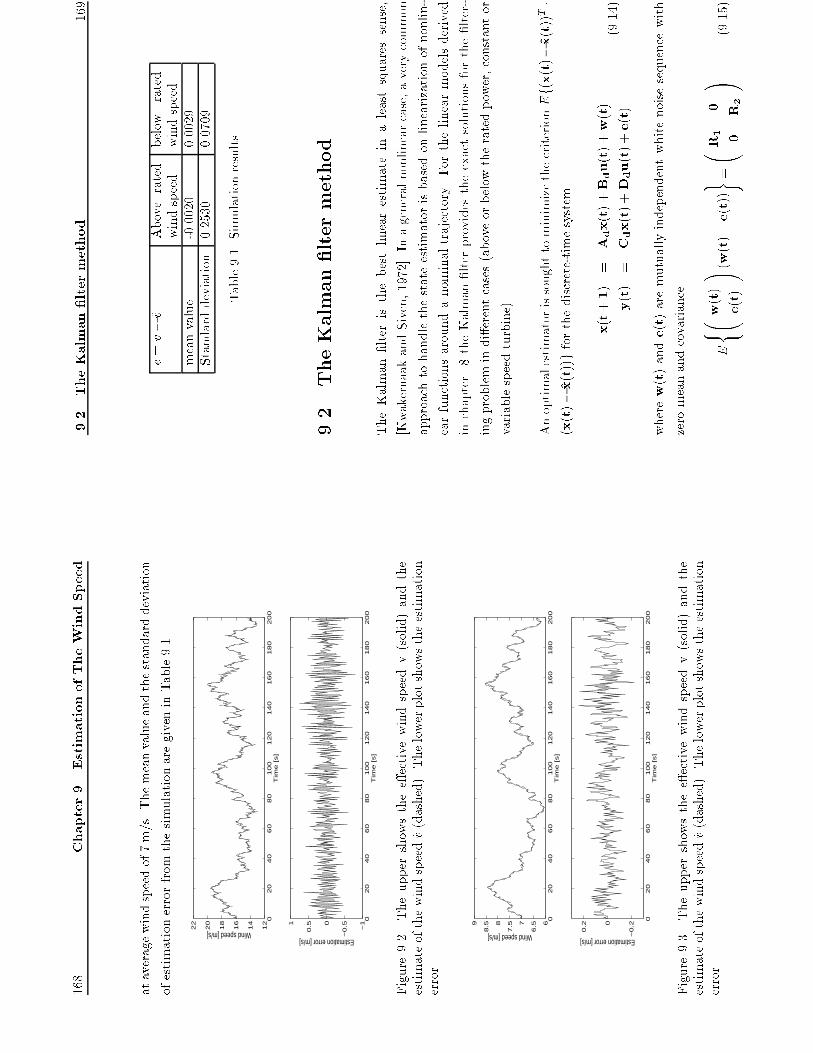
168
Chapter9.EstimationofTheWindSpeed
ataveragewindspeedof7m/s.Themeanvalueandthestandarddeviation
ofestimationerrorfromthesimulationaregiveninTable9.1.
02
04
06
08
01
00
12
01
40
16
01
80
20
01
2
14
16
18
20
22
Tim
e [s]
Wind speed [m/s]
02
04
06
08
01
00
12
01
40
16
01
80
20
0−
1
−0
.50
0.51
Tim
e [s]
Estimation error [m/s]
Figure9.2.Theuppershowsthee�ectivewindspeedv(solid)andthe
estimateofthewindspeed^v(dashed).Thelowerplotshowstheestimation
error
02
04
06
08
01
00
12
01
40
16
01
80
20
06
6.57
7.58
8.59
Tim
e [s]
Wind speed [m/s]
02
04
06
08
01
00
12
01
40
16
01
80
20
0
−0
.20
0.2
Tim
e [s]
Estimation error [m/s]
Figure9.3.Theuppershowsthee�ectivewindspeedv(solid)andthe
estimateofthewindspeed^v(dashed).Thelowerplotshowstheestimation
error
9.2
TheKalman�ltermethod
169
e=v�^v
Aboverated
windspeed
below
rated
windspeed
meanvalue
-0.0020
0.0029
Standarddeviation
0.2530
0.0709
Table9.1.Simulationresults
9.2
TheKalman�ltermethod
TheKalman�lteristhebestlinearestimateinaleastsquaressense,
[KwakernaakandSiven,1972].Inageneralnonlinearcase,averycommon
approachtohandlethestateestimatorisbasedonlinearizationofnonlin-
earfunctionsaroundanominaltrajectory.Forthelinearmodelsderived
inchapter8theKalman�lterprovidestheexactsolutionsforthe�lter-
ingproblemindi�erentcases(aboveorbelowtheratedpower,constantor
variablespeedturbine).
AnoptimalestimatorissoughttominimizethecriterionEf(x(t)�^x(t))T�
(x(t)�^x(t))gforthediscrete-timesystem
x(t+1)
=
Adx(t)+Bdu(t)+w(t)
y(t)
=
Cdx(t)+Ddu(t)+e(t)
(9.14)
wherew(t)ande(t)aremutuallyindependentwhitenoisesequencewith
zeromeanandcovariance
E( w(t)
e(t)
! (w(t)
e(t))
) = R
1
0
0
R2
!
(9.15)
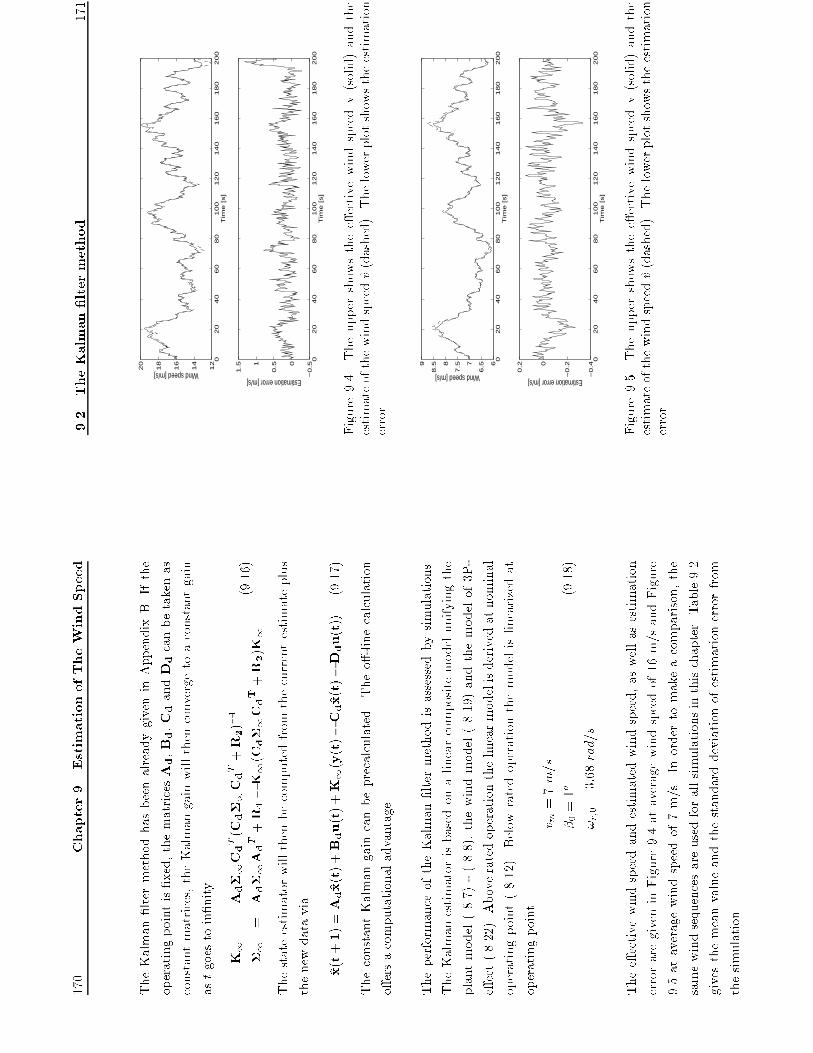
170
Chapter9.EstimationofTheWindSpeed
TheKalman�ltermethodhasbeenalreadygiveninAppendixB.Ifthe
operatingpointis�xed,thematricesAd,Bd,Cd
andDd
canbetakenas
constantmatrices,theKalmangainwillthenconvergetoaconstantgain
astgoestoin�nity.
K1
=
Ad�1Cd
T(Cd�1Cd
T+R2)�1
�1
=
Ad�1Ad
T+R1�K1(Cd�1Cd
T
+R2)K1
(9.16)
Thestateestimatorwillthenbecomputedfromthecurrentestimateplus
thenewdatavia
^x(t+1)=Ad^x(t)+Bdu(t)+K1(y(t)�Cd^x(t)�Ddu(t))
(9.17)
TheconstantKalmangaincanbeprecalculated.Theo�-linecalculation
o�ersacomputationaladvantage.
TheperformanceoftheKalman�ltermethodisassessedbysimulations.
TheKalmanestimatorisbasedonalinearcompositemodelunifyingthe
plantmodel(8.7)-(8.8),thewindmodel(8.19)andthemodelof3P-
e�ect(8.22).Aboveratedoperationthelinearmodelisderivedatnominal
operatingpoint(8.12).Belowratedoperationthemodelislinearizedat
operatingpoint
v m=7m=s
�0=1o
!r;0=3:68rad=s
(9.18)
Thee�ectivewindspeedandestimatedwindspeed,aswellasestimation
erroraregiveninFigure9.4ataveragewindspeedof16m/sandFigure
9.5ataveragewindspeedof7m/s.Inordertomakeacomparison,the
samewindsequencesareusedforallsimulationsinthischapter.Table9.2
givesthemeanvalueandthestandarddeviationofestimationerrorfrom
thesimulation.
9.2
TheKalman�ltermethod
171
02
04
06
08
01
00
12
01
40
16
01
80
20
01
2
14
16
18
20
Tim
e [s]
Wind speed [m/s]
02
04
06
08
01
00
12
01
40
16
01
80
20
0−
0.50
0.51
1.5
Tim
e [s]
Estimation error [m/s]
Figure9.4.Theuppershowsthee�ectivewindspeedv(solid)andthe
estimateofthewindspeed^v(dashed).Thelowerplotshowstheestimation
error
02
04
06
08
01
00
12
01
40
16
01
80
20
06
6.57
7.58
8.59
Tim
e [s]
Wind speed [m/s]
02
04
06
08
01
00
12
01
40
16
01
80
20
0−
0.4
−0
.20
0.2
Tim
e [s]
Estimation error [m/s]
Figure9.5.Theuppershowsthee�ectivewindspeedv(solid)andthe
estimateofthewindspeed^v(dashed).Thelowerplotshowstheestimation
error
172
Chapter9.EstimationofTheWindSpeed
e=v�^v
Aboverated
windspeed
below
rated
windspeed
meanvalue
0.1723
-0.0343
Standarddeviation
0.2258
0.0736
Table9.2.Simulationresults
ItcanbeclearlyseenfromFigure9.4andFigure9.5thattheestimation
errorincreaseswhenthewindspeeddeviatesfromthenominalwindspeed.
ThereasonisthatthelinearmodelusedbytheKalman�lterdesignis�xed
atnominaloperatingpoint.Thedi�erencebetweenthelinearmodeland
actualsystemincreasesasthewindleavesthenominalpoint.Hence,the
useoftheextendedKalman�ltermaybenecessaryforestimationofthe
windspeed.
9.3
TheextendedKalman�ltermethod
Alinearizedplantrepresentationistypicallyemployedforestimatorand
controllerdesign.However,awindturbineisanonlinearsystem,inpar-
ticular,theaerodynamicbehaviourishighlynonlinear.Becausetheroleof
therotorinconvertingwindenergyintomechanicalenergyisacentralone,
thenonlinearaerodynamicoftherotorexertsasubstantialin uenceonthe
characteristicsofthewholesystem.[LeithandLeithead,1997].Sinceitis
knownhowthedynamicsoftheprocesschangewiththeoperatingcondi-
tions,itispossibletochangetheparametersoftheestimatorbymonitoring
theoperatingconditionoftheprocess.
9.3
TheextendedKalman�ltermethod
173
Abetterchoiceforlinearizationtrajectoryistousethecurrentestimateof
thestate.Linearizingthemodelaboutitateverysamplingtimeandapply-
ingtheKalman�ltertotheresultinglinearizedmodelyieldsthealgorithm
knownastheextendedKalman�lter[Gelb,1974].TheextendedKalman
�ltercanbeconsideredasanoptimalnonlinearestimationalgorithmfor
nonlinearsystems,whichhasalreadybeengiveninAppendixB.
TheinvestigationoftheextendedKalman�ltermethodusedforwindspeed
estimationwillbecarriedoutseparatelyforbelowratedoperationandabove
ratedoperation.
9.3.1
Aboveratedwindspeed
TheaerodynamictorqueTrdependsnonlinearlyonboththee�ectivewind
speedvandthepitchangle�foraconstantspeedturbine.SinceaPI
regulatorisappliedtothesystem
forthepurposeofpowerlimitation,it
canbeassumedthatthenominaloperatingpointofthesystemisaround
thepoweroutputof400KW.Thecontourlevelof400KW
isdrawnin
Figure9.6.
Foreachwindspeedaboveratedwindspeed,theratedaerodynamictorque
Tw;0isattainedatauniquepitchangle,i.e.,foraconstantaerodynamic
torque,thepitchangle�isafunctionofthewindspeedv.Thenonlinearity
ofthemodeldependsthenonthee�ectivewindspeedonly.Thismeans
thatthenonlinearaerodynamictorquecanbelinearizedbymonitoringthe
currentestimateofthewindspeedateverysamplingtime.
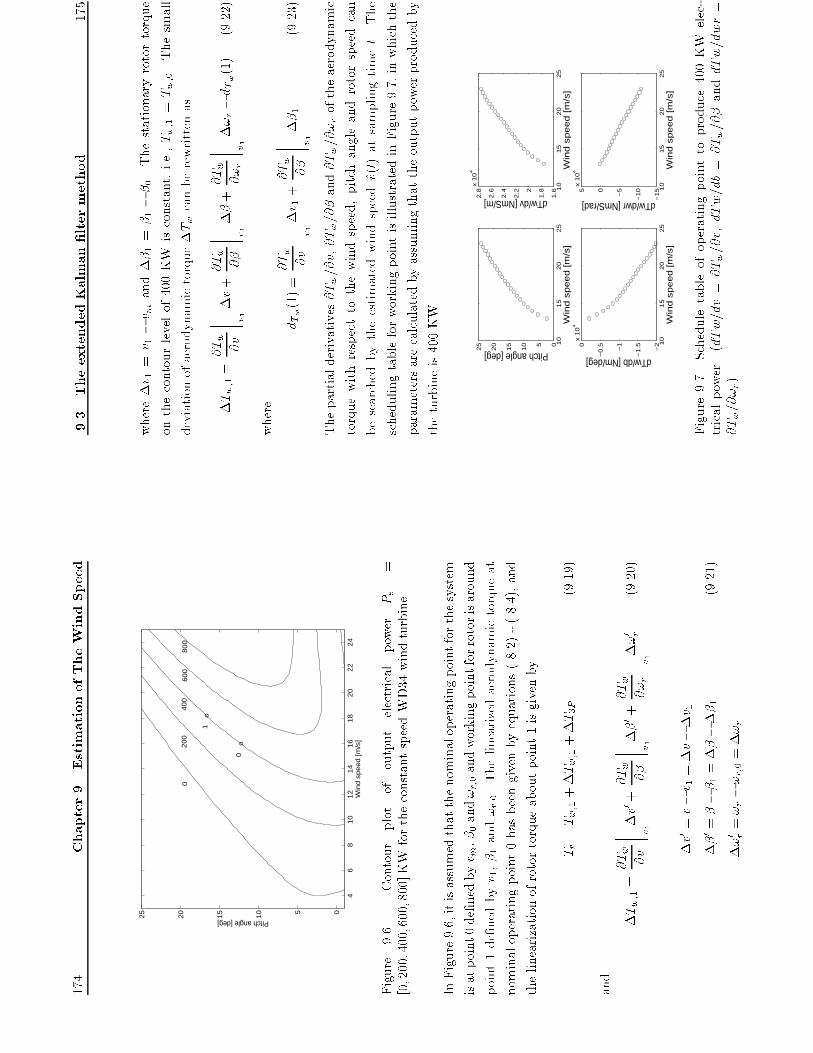
174
Chapter9.EstimationofTheWindSpeed
46
81
01
21
41
61
82
02
22
4
05
10
15
20
25
Win
d s
pe
ed
[m
/s]
Pitch angle [deg]
02
00
40
06
00
80
0
o
o
0
1
Figure
9.6.
Contour
plot
of
output
electrical
power
Pe
=
[0;200;400;600;800]KW
fortheconstantspeedWD34windturbine.
InFigure9.6,itisassumedthatthenominaloperatingpointforthesystem
isatpoint0de�nedbyv m,�0and!r;0andworkingpointforrotorisaround
point1de�nedbyv 1,�1and!r;0.Thelinearizedaerodynamictorqueat
nominaloperatingpoint0hasbeengivenbyequations(8.2)-(8.4),and
thelinearizationofrotortorqueaboutpoint1isgivenby
Tr=Tw;1+�Tw;1+�T3P
(9.19)
and
�Tw;1=
@Tw@v
? ? ? ? v 1�v0 +@Tw@�
? ? ? ? v 1��0 +@Tw
@!r
? ? ? ? v 1�!0 r
(9.20)
�v0 =v�v 1=�v��v 1
��0 =���1=�����1
(9.21)
�!0 r=!r�!r;0=�!r
9.3
TheextendedKalman�ltermethod
175
where�v 1=v 1�v mand��1=�1��0.Thestationaryrotortorque
onthecontourlevelof400KW
isconstant,i.e.,Tw;1=Tw;0.Thesmall
deviationofaerodynamictorque�Tw
canberewrittenas
�Tw;1=
@Tw@v
? ? ? ? v 1�v+
@Tw@�
? ? ? ? v 1��+
@Tw
@!r
? ? ? ? v 1�!r�dTw
(1)
(9.22)
where
dTw
(1)=
@Tw@v
? ? ? ? v 1�v 1+
@Tw@�
? ? ? ? v 1��1
(9.23)
Thepartialderivatives@Tw=@v,@Tw=@�and@Tw=@!roftheaerodynamic
torquewithrespecttothewindspeed,pitchangleandrotorspeedcan
besearchedbytheestimatedwindspeed^v(t)atsamplingtimet.The
schedulingtableforworkingpointisillustratedinFigure9.7,inwhichthe
parametersarecalculatedbyassumingthattheoutputpowerproducedby
theturbineis400KW.
10
15
20
25
05
10
15
20
25
Win
d s
pe
ed
[m
/s]
Pitch angle [deg]
10
15
20
25
1.6
1.82
2.2
2.4
2.6
2.8
x 1
04
Win
d s
pe
ed
[m
/s]
dTw/dv [NmS/m]
10
15
20
25
−2
−1
.5−1
−0
.50x 1
04
Win
d s
pe
ed
[m
/s]
dTw/db [Nm/deg]
10
15
20
25
−1
5
−1
0
−505
x 1
04
Win
d s
pe
ed
[m
/s]
dTw/dwr [NmS/rad]
Figure9.7.Scheduletableofoperatingpointtoproduce400KW
elec-
tricalpower.(dTw=dv=@Tw=@v,dTw=db=@Tw=@�anddTw=dwr=
@Tw=@!r)
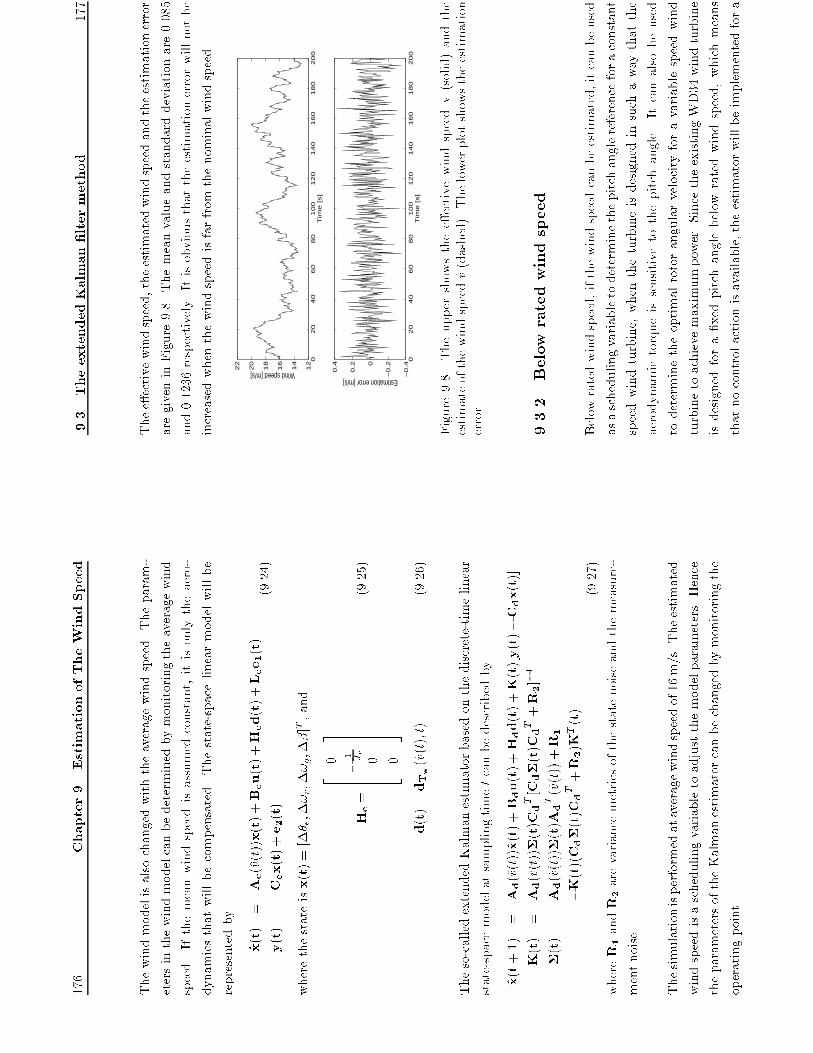
176
Chapter9.EstimationofTheWindSpeed
Thewindmodelisalsochangedwiththeaveragewindspeed.Theparam-
etersinthewindmodelcanbedeterminedbymonitoringtheaveragewind
speed.Ifthemeanwindspeedisassumedconstant,itisonlytheaero-
dynamicsthatwillbecompensated.Thestate-spacelinearmodelwillbe
representedby
_x(t)
=
Ac(^v(t))x(t)+Bcu(t)+Hcd(t)+Lce1(t)
y(t)
=
Ccx(t)+e2(t)
(9.24)
wherethestateisx(t)=[�� �;�!r;�!g;��]T,and
Hc=
2 6 6 6 6 40 �
1 Jr
0 0
3 7 7 7 7 5
(9.25)
d(t)=dTw
(^v(t);t)
(9.26)
Theso-calledextendedKalmanestimatorbasedonthediscrete-timelinear
state-spacemodelatsamplingtimetcanbedescribedby
^x(t+1)
=
Ad(^v(t))^x(t)+Bdu(t)+Hdd(t)+K(t)[y(t)�Cdx(t)]
K(t)
=
Ad(^v(t))�(t)Cd
T[Cd�(t)Cd
T+R2]�1
�(t)
=
Ad(^v(t))�(t)Ad
T(^v(t))+R1
�K(t)(Cd�(t)Cd
T+R2)KT(t)
(9.27)
whereR1
andR2
arevariancemetricsofthestatenoiseandthemeasure-
mentnoise.
Thesimulationisperformedataveragewindspeedof16m/s.Theestimated
windspeedisaschedulingvariabletoadjustthemodelparameters.Hence
theparametersoftheKalmanestimatorcanbechangedbymonitoringthe
operatingpoint.
9.3
TheextendedKalman�ltermethod
177
Thee�ectivewindspeed,theestimatedwindspeedandtheestimationerror
aregiveninFigure9.8.Themeanvalueandstandarddeviationare0.085
and0.1236respectively.Itisobviousthattheestimationerrorwillnotbe
increasedwhenthewindspeedisfarfromthenominalwindspeed.
02
04
06
08
01
00
12
01
40
16
01
80
20
01
2
14
16
18
20
22
Tim
e [s]
Wind speed [m/s]
02
04
06
08
01
00
12
01
40
16
01
80
20
0−
0.4
−0
.20
0.2
0.4
Tim
e [s]
Estimation error [m/s]
Figure9.8.Theuppershowsthee�ectivewindspeedv(solid)andthe
estimateofthewindspeed^v(dashed).Thelowerplotshowstheestimation
error
9.3.2
Below
ratedwindspeed
Belowratedwindspeed,ifthewindspeedcanbeestimated,itcanbeused
asaschedulingvariabletodeterminethepitchanglereferenceforaconstant
speedwindturbine,whentheturbineisdesignedinsuchawaythatthe
aerodynamictorqueissensitivetothepitchangle.Itcanalsobeused
todeterminetheoptimalrotorangularvelocityforavariablespeedwind
turbinetoachievemaximumpower.SincetheexistingWD34windturbine
isdesignedfora�xedpitchanglebelowratedwindspeed,whichmeans
thatnocontrolactionisavailable,theestimatorwillbeimplementedfora
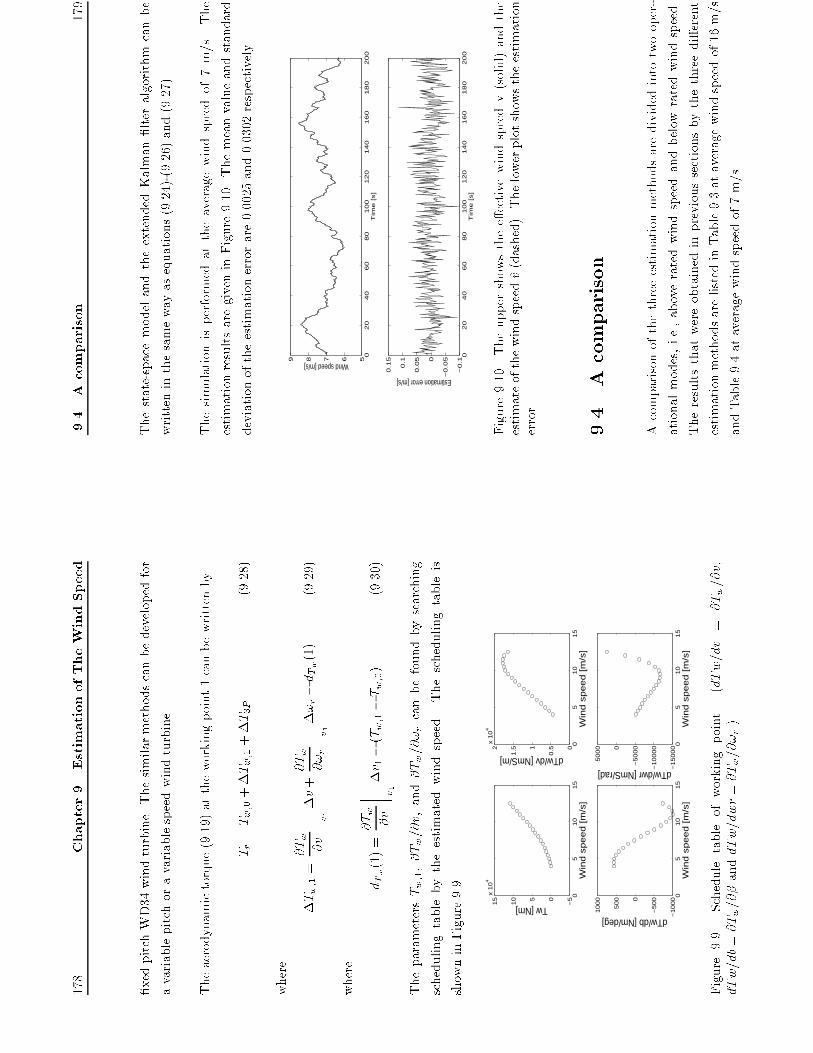
178
Chapter9.EstimationofTheWindSpeed
�xedpitchWD34windturbine.Thesimilarmethodscanbedevelopedfor
avariablepitchoravariablespeedwindturbine.
Theaerodynamictorque(9.19)attheworkingpoint1canbewrittenby
Tr=Tw;0+�Tw;1+�T3P
(9.28)
where
�Tw;1=
@Tw@v
? ? ? ? v 1�v+
@Tw
@!r
? ? ? ? v 1�!r�dTw
(1)
(9.29)
where
dTw
(1)=
@Tw@v
? ? ? ? v 1�v 1�(Tw;1�Tw;0)
(9.30)
TheparametersTw;1,@Tw=@v,and@Tw=@!r
canbefoundbysearching
schedulingtablebytheestimatedwindspeed.Theschedulingtableis
showninFigure9.9.
05
10
15
−505
10
15
x 1
04
Win
d s
pe
ed
[m
/s]
Tw [Nm]
05
10
15
0
0.51
1.52
x 1
04
Win
d s
pe
ed
[m
/s]
dTw/dv [NmS/m]
05
10
15
−1
00
0
−5
000
50
0
10
00
Win
d s
pe
ed
[m
/s]
dTw/db [Nm/deg]
05
10
15
−1
50
00
−1
00
00
−5
00
00
50
00
Win
d s
pe
ed
[m
/s]
dTw/dwr [NmS/rad]
Figure9.9.
Scheduletableofworkingpoint.
(dTw=dv
=
@Tw=@v,
dTw=db=@Tw=@�anddTw=dwr=@Tw=@!r.)
9.4
A
comparison
179
Thestate-spacemodelandtheextendedKalman�lteralgorithmcanbe
writteninthesamewayasequations(9.24)-(9.26)and(9.27).
Thesimulationisperformedattheaveragewindspeedof7m/s.The
estimationresultsaregiveninFigure9.10.Themeanvalueandstandard
deviationoftheestimationerrorare0.0025and0.0302respectively.
02
04
06
08
01
00
12
01
40
16
01
80
20
056789
Tim
e [s]
Wind speed [m/s]
02
04
06
08
01
00
12
01
40
16
01
80
20
0−
0.1
−0
.050
0.0
5
0.1
0.1
5
Tim
e [s]
Estimation error [m/s]
Figure9.10.Theuppershowsthee�ectivewindspeedv(solid)andthe
estimateofthewindspeed^v(dashed).Thelowerplotshowstheestimation
error
9.4
A
comparison
Acomparisonofthethreeestimationmethodsaredividedintotwooper-
ationalmodes,i.e.,aboveratedwindspeedandbelowratedwindspeed.
Theresultsthatwereobtainedinprevioussectionsbythethreedi�erent
estimationmethodsarelistedinTable9.3ataveragewindspeedof16m/s
andTable9.4ataveragewindspeedof7m/s.

180
Chapter9.EstimationofTheWindSpeed
e=v�^v
Newton
Kalman
Extended
Kalman
meanvalue
-0.0020
0.1723
0.0142
Standarddeviation
0.2530
0.2258
0.1236
Table9.3.Ataveragewindspeedof16m/s.
e=v�^v
Newton
Kalman
Extended
Kalman
meanvalue
-0.0029
-0.0343
0.0025
Standarddeviation
0.0709
0.0736
0.0302
Table9.4.Ataveragewindspeedof7m/s.
TheNewton-RaphsonmethodwiththeassumptionPr=Pe=�providesa
smallmeanvalueofestimationerrorinbothcases,butitgivesalarge
variance.ThereasonisthattherotorpowerPrisnotmeasurableandthe
assumptionPr=Pe=�leadstotheestimationerror.However,theNewton-
Raphsonmethodisthemostsimplemethod.Itisnotbasedonthemodel
ofthewholesystemanditisnotnecessarytoknowtheaveragewindspeed.
TheKalman�ltermethodgivesbothlargevarianceandmeanvalueof
estimationerrorinthethreemethods,becausethelinearmodelusedinthe
Kalman�lterdesignis�xedatnominaloperatingpoint.Itcanbeclearly
seenfromthesimulations,theestimationerrorisincreasedwhenthewind
speeddeviatesfromthenominalwindspeed,wherethedi�erencebetween
thelinearmodelandactualsystemincreases.TheKalman�lteralgorithm
yieldsless�lteringaccuracythantheextendedKalman�lteralgorithm,
9.5
Test
181
butito�erscomputationaladvantage.TheKalmangaincanbecalculated
o�-line.
TheextendedKalman�lterisaspecialkindofopen-loopadaptationor
changeofestimatorparameters,whichgivesthebestperformanceinthe
threemethods.Themethodachievesthesmallestvariancesinbothcases.
TheextendedKalman�ltermethodhastheadvantagethatthelinearmodel
usedintheKalman�lterdesigncanbecalibratedforoperatingpointby
monitoringtheestimatedwindspeed.Thereforethechangesinprocess
gaincanbeconsideredbytheestimator,andtheestimationerrorwillnot
beincreasedwhenthewindspeeddeviatesfromthenominalwindspeed.
BoththeKalman�ltermethodandtheextendedKalman�ltermethod
requireagoodmodelofthesystem.EventhoughtheextendedKalman
�ltergivesthebestperformance,becauseofthecomputationtimerequired
bythemethodandlimitedavailableresources,theNewtonandKalman
�ltermethodsarestillgoodchoicesforimplementationonarealturbine.
9.5
Test
ThedatasequencesfromtheWD34windturbinewerecollectedinanopen-
loopexperiment,inwhichthepitchangleofrotorbladeswas�xedat1o,the
windspeedandpoweroutputweremeasured.Thewindwasmeasuredby
ananemometerwhichisat68minfrontoftheturbine,atthesameheight
asthehub.

182 Chapter 9. Estimation of The Wind Speed
A comparison of the experimental data and the estimated data is very dif-
�cult. First of all, the measured wind speed has to be �ltered to obtain the
wind speed experienced by the rotor. The �lter function is an approxima-
tion. Secondly, the distance between the measurement point and rotor of
the turbine may cause a time delay and discrepancy between the measured
wind speed and the true wind speed at the wind turbine, especially the high
frequency components in the wind. Thirdly, the power measurements are
corrupted by 1P, 2P and 3P- uctuations, which have to be �ltered out. The
model of 3P-e�ect is not included in the design model in this test.
Pitch angle
filterLP
Comparison
Wind
measurements
Effective
wind speed
EstimatorEstimated
wind speed
Filtered power
measurements
Figure 9.11. Block scheme of the comparison
The block scheme of the comparison of the experimental result and esti-
mated wind speed is illustrated in Figure 9.11. The e�ective wind speed
experienced by the turbine is derived by dynamically �ltering the measure-
ments of the point wind speed. The �lter function was given in ( 7.45). The
pitch angle and power measurements will be used as an input and output
signal to the estimator. Since there are evident contents of 1P, 2P and 3P-
e�ect in the power measurements, which depend signi�cantly on the speci�c
wind turbine and site, the power measurements have to be �ltered by band-
stop �lters with bandwidth of 0:15�(n!r;0) and a fourth order Butterworth
low-pass �lter with cut-o� frequency of 8 rad/s to discard high frequency
9.5 Test 183
components. The block scheme of pre�ltering the power measurements is
shown in Figure 9.12.
measurements
Power
measurementsfilter1P
filter2P
filter3P
filterLP Filtered power
Figure 9.12. Pre�ltering of power measurements
The test is carried out by using the Kalman �lter method. The simulation
result is plotted in Figure 9.13. The estimated wind speed given in the �gure
seems to agree with the �ltered measurements. The time delay between the
estimated wind speed and �ltered wind measurements can be obviously
seen. This is caused by the distance between the measurement point and
the turbine. The two data sequences deviate in some areas, it may caused
by the distance or the precision of the �lter function.
0 50 100 150 200 250 3004.5
5
5.5
6
6.5
7
7.5
8
Time [s]Wi
nd sp
eed [
m/s]
Figure 9.13. The �ltered measurements v (solid) and the estimate of the
wind speed ^v (dashed)
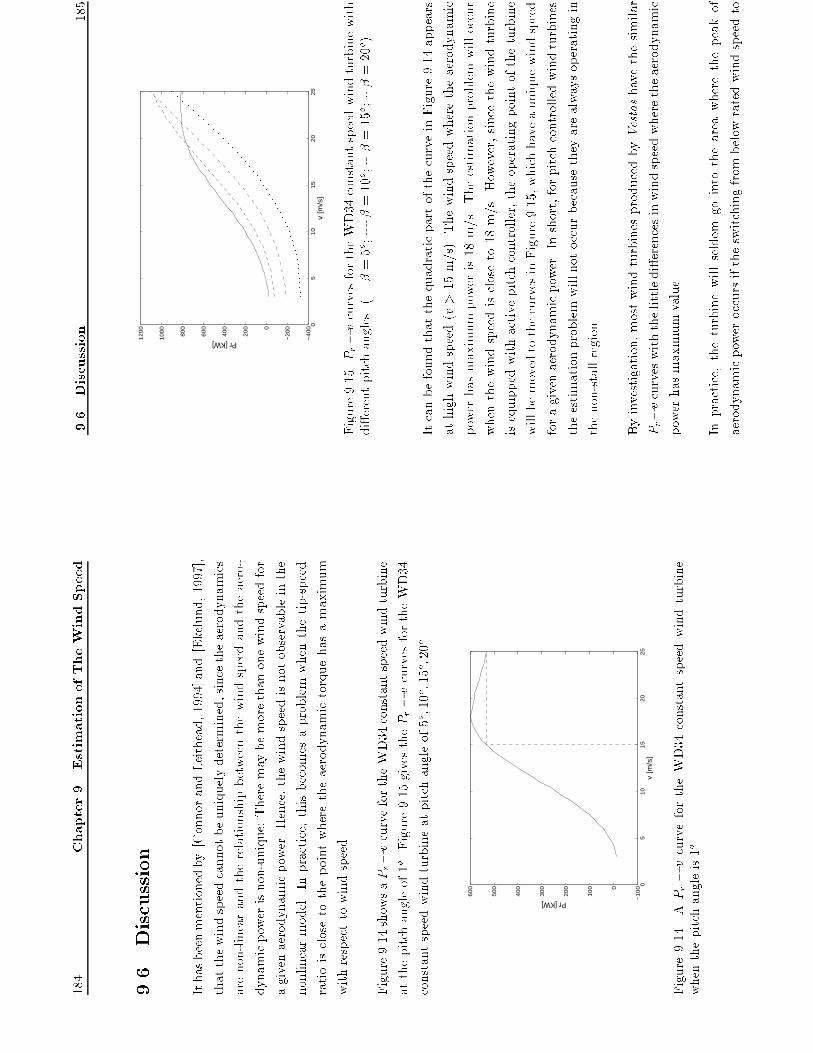
184
Chapter9.EstimationofTheWindSpeed
9.6
Discussion
Ithasbeenmentionedby[ConnorandLeithead,1994]and[Ekelund,1997],
thatthewindspeedcannotbeuniquelydetermined,sincetheaerodynamics
arenon-linearandtherelationshipbetweenthewindspeedandtheaero-
dynamicpowerisnon-unique:Theremaybemorethanonewindspeedfor
agivenaerodynamicpower.Hence,thewindspeedisnotobservableinthe
nonlinearmodel.Inpractice,thisbecomesaproblemwhenthetip-speed
ratioisclosetothepointwheretheaerodynamictorquehasamaximum
withrespecttowindspeed.
Figure9.14showsaPr�vcurvefortheWD34constantspeedwindturbine
atthepitchangleof1o.Figure9.15givesthePr�vcurvesfortheWD34
constantspeedwindturbineatpitchangleof5o;10o;15o;20o.
05
10
15
20
25
−1
000
10
0
20
0
30
0
40
0
50
0
60
0
v [m
/s]
Pr [KW]
Figure9.14.APr�vcurvefortheWD34constantspeedwindturbine
whenthepitchangleis1o.
9.6
Discussion
185
05
10
15
20
25
−4
00
−2
000
20
0
40
0
60
0
80
0
10
00
12
00
v [m
/s]
Pr [KW]
Figure9.15.Pr�vcurvesfortheWD34constantspeedwindturbinewith
di�erentpitchangles.(|
�=5o;--�=10o;-��=15o;���=20o)
ItcanbefoundthatthequadraticpartofthecurveinFigure9.14appears
athighwindspeed(v>15m/s).Thewindspeedwheretheaerodynamic
powerhasmaximumpoweris18m/s.Theestimationproblemwilloccur
whenthewindspeediscloseto18m/s.However,sincethewindturbine
isequippedwithactivepitchcontroller,theoperatingpointoftheturbine
willbemovedtothecurvesinFigure9.15,whichhaveauniquewindspeed
foragivenaerodynamicpower.Inshort,forpitchcontrolledwindturbines
theestimationproblemwillnotoccurbecausetheyarealwaysoperatingin
thenon-stallregion.
Byinvestigation,mostwindturbinesproducedbyVestashavethesimilar
Pr�vcurveswiththelittledi�erencesinwindspeedwheretheaerodynamic
powerhasmaximumvalue.
Inpractice,theturbinewillseldom
gointotheareawherethepeakof
aerodynamicpoweroccursiftheswitchingfrombelowratedwindspeedto
186
Chapter9.EstimationofTheWindSpeed
aboveratedwindspeedorverseviceareproperlydesigned.Inorderto
increasetherobustnessofthecontroller,theoperatingpointclosedtothe
switchingpointcanbe�xedforthecontroller,andgainschedulingwith
theestimatedwindspeedasaschedulingvariablewillonlybeimplemented
whenthepitchislargerthan5o.
Asithasbeensuggestedby
[Ekelund,1997],analternativeapproachis
tode�netheoperationalstrategyinthetorque-rotorspeedplane.Any
controlstrategyisequivalenttoacurveinthisplane.Onlyanestimateof
aerodynamictorqueisrequiredratherthananestimateofwindspeed.
9.7
Summary
Threedi�erentestimationmethodshavebeenpresentedinthissection.An
analysisandcomparisonofthreemethodsaremadebasedonthesimulation
results.Theestimationmethodsaretestedbyexperimentaldata,andthe
estimatedwindspeedshowsagoodagreementwiththe�lteredmeasure-
mentsofthepointwindspeed.Theresultsindicatethatestimationofthe
windspeedisausefulmethodforthecontrollerdesign,ifitrequiresthe
knowledgeofthewindspeed.However,theproblemmayoccuratswitching
area,whichrequirecarefullydesignoftheswitchingfromaboveratedwind
speedtobelowratedwindspeedorversevice.
Chapter10
ControlAboveRated
Power
Theemphasisofthischapterisgiventothedesignofcontrolsystemsabove
ratedpower.Designofcontrolsystemsforaconstantspeedandvariable
speedwindturbineistreatedseparately.
Thecontrolobjectivesforwindturbinesoutlinedintheintroductionneed
tobeclari�edmoreprecisely.Theloadtransientsexperiencedbythewind
turbineareoftwotypes.Firstly,thewind,asadisturbanceinputtothetur-
bine,resultsinlargeoscillationsindrivetraintorqueandelectricalpower.
Thecontrolsystemshouldattempttoreducethesetoaminimumandre-
ducethestressonthepowertraincomponents.Variationsinloadscannot
becompletelyeliminatedbutreducingtheirmagnitudeisdesirable.To
187
188
Chapter10.ControlAboveRatedPower
whatextentthesebene�tsareaccomplisheddependsonthecontrolsys-
temandthecharacteristicsoftheplant.Secondly,therearevariationsin
thestructureloads.Ifthecontrolsystem
operatesperfectly,theturbine
structurestateswilltracktheirsteadystatevalues.Ofcourse,thecon-
trolsystemdoesnotperformperfectlyandturbineexperiencesadditional
transientstructuralloads,thecontrollershouldattempttoreducetheseto
aminimum.Inaddition,thewindturbineissubjectto3P-e�ectdueto
rotationalsamplingofthewind�eld.Thecontrollershouldnotcausethese
tobeaggravated.
Thecontrolsystemmustincreaserejectionofthedisturbancescausedby
windspeedvariations,andalsorejectslowexternaldisturbancessuchas
changesinmeanwindspeedbyreducingthesteadystateerrors.Atthe
sametime,thecontrollershouldreducetheextentofcontrolactionand
preventtoohighacontroldemand[Leitheadetal.,1992].Atrade-o�has
tobemadebetweendi�erentobjectives.
Theissueastowhetherstructuralresonancesshouldbeavoidedisnot
consideredhereandsonoavoidingactionisincorporatedintheoperational
strategy.However,thetowermotionwillbenotedinsimulations.
Pitchcontrol
Thewindturbineissubjecttostochasticvaryingloadswhichareinduced
bywindspeedvariationsbothintimeandoverthediscsweptbytherotor.
Thetorqueinducedontherotorbythewindisdependentonthepitch
angleoftheblades.Thismakesitpossibletocontroltheenergyabsorbed
bytheturbinebychangingthepitchangleoftheblades.
189
Inconstantspeedwindturbines,therotordirectlydrivesthegrid-connected
generatorandhencemustrotateatanapproximate�xedmultipleofthe
gridfrequency.Theconstantspeedturbineischaracterizedbysti�system
dynamics,withalargerotorinertia.Whenthewindspeedrisesaboverated,
thecontroltaskforconstantspeedpitch-regulatedturbinesistovarythe
pitchangleofthebladessuitablytoregulatethepoweroutputtotherated
value,whileminimizingtheloadtransientsandtherebyreducingfatigue.
However,thetaskofpowersmoothingrequiresfastvariationsofthepitch
angleofbladeswhichresultinlargemechanicalloadsonthebladesand
reducedlifetimeofturbines.Thereforethecontroldesignshouldbebased
onatrade-o�betweenthepowersmoothingandpitchmovements.
Aconstantspeedwindturbineisasingleinputandsingleoutputsystem.
Combinedvariablespeedandpitchcontrol
Invariablespeedwindturbines,thegeneratorisdecoupledfromthegridby
thepowerelectronicsandrotormayrotateatanyspeed.Avariablespeed
machinehastwopossiblemeansofcontrol.Powerelectronicscontrolling
theelectricallinktothegrid,providesavariablespeede�ect.Thepitch
mechanism,ifavailable,altersthee�ectiverotoraerodynamice�ciency.
Theusualphilosophyfordesigningacontrolsystemforaboveratedopera-
tionistouseafastcontrolactionongeneratorreferencetorqueandaslower
controlactiononpitchangletominimizeactuatoractivity.
[LeitheadandConnor,1994]
Aboveratedwindspeed,avariablespeedwindturbineisatwoinputand
twooutputsystemwithinteractionbetweenthetwocontrolactions.
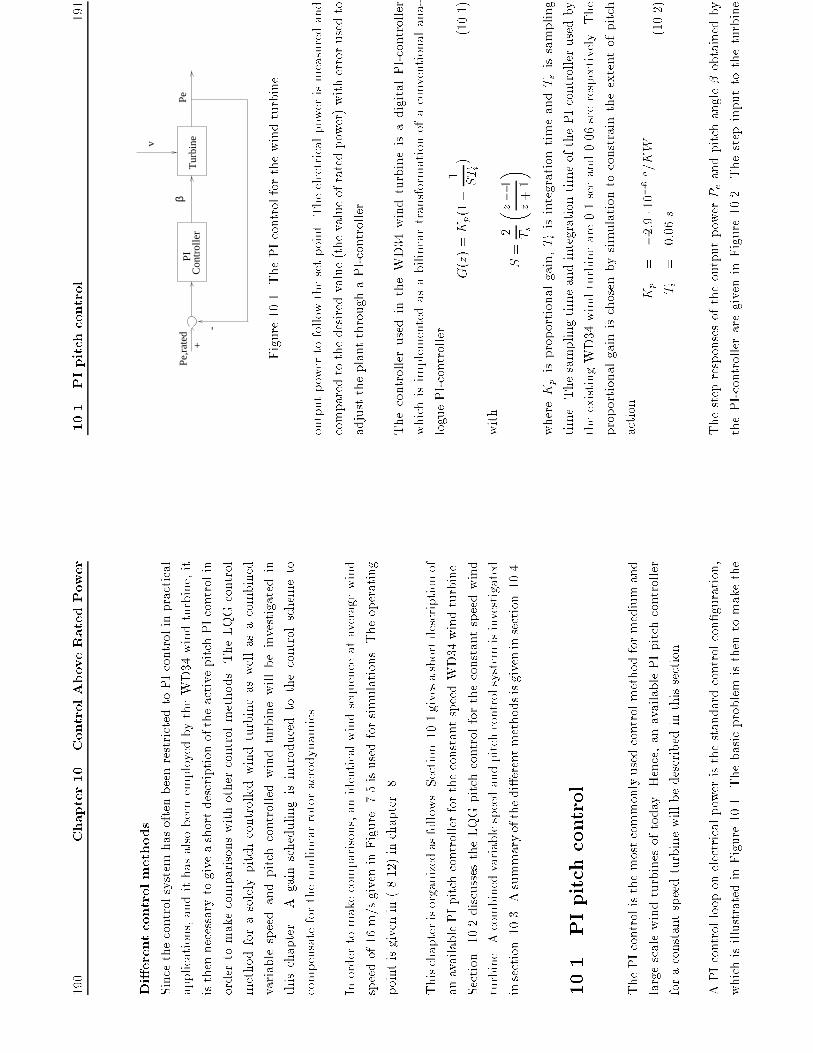
190
Chapter10.ControlAboveRatedPower
Di�erentcontrolmethods
SincethecontrolsystemhasoftenbeenrestrictedtoPIcontrolinpractical
applications,andithasalsobeenemployedbytheWD34windturbine,it
isthennecessarytogiveashortdescriptionoftheactivepitchPIcontrolin
ordertomakecomparisonswithothercontrolmethods.TheLQGcontrol
methodforasolelypitchcontrolledwindturbineaswellasacombined
variablespeedandpitchcontrolledwindturbinewillbeinvestigatedin
thischapter.Againschedulingisintroducedtothecontrolschemeto
compensateforthenonlinearrotoraerodynamics.
Inordertomakecomparisons,anidenticalwindsequenceataveragewind
speedof16m/sgiveninFigure7.5isusedforsimulations.Theoperating
pointisgivenin(8.12)inchapter8.
Thischapterisorganizedasfollows.Section10.1givesashortdescriptionof
anavailablePIpitchcontrollerfortheconstantspeedWD34windturbine.
Section
10.2discussestheLQGpitchcontrolfortheconstantspeedwind
turbine.Acombinedvariablespeedandpitchcontrolsystemisinvestigated
insection10.3.Asummaryofthedi�erentmethodsisgiveninsection10.4.
10.1
PIpitchcontrol
ThePIcontrolisthemostcommonlyusedcontrolmethodformediumand
largescalewindturbinesoftoday.Hence,anavailablePIpitchcontroller
foraconstantspeedturbinewillbedescribedinthissection.
APIcontrollooponelectricalpoweristhestandardcontrolcon�guration,
whichisillustratedinFigure10.1.Thebasicproblemisthentomakethe
10.1
PIpitchcontrol
191
-
Pe,r
ated
PIC
ontr
olle
rT
urbi
nev
Peβ
+
Figure10.1.ThePIcontrolforthewindturbine
outputpowertofollowthesetpoint.Theelectricalpowerismeasuredand
comparedtothedesiredvalue(thevalueofratedpower)witherrorusedto
adjusttheplantthroughaPI-controller.
ThecontrollerusedintheWD34windturbineisadigitalPI-controller
whichisimplementedasabilineartransformationofaconventionalana-
loguePI-controller
G(z)=Kp(1+
1STi
)
(10.1)
with
S=
2 Ts
� z�1
z+1
�
whereKp
isproportionalgain,TiisintegrationtimeandTsissampling
time.ThesamplingtimeandintegrationtimeofthePIcontrollerusedby
theexistingWD34windturbineare0.1secand0.06secrespectively.The
proportionalgainischosenbysimulationtoconstraintheextentofpitch
action.
Kp
=
�2:9�10�6o=KW
Ti
=
0:06s
(10.2)
ThestepresponsesoftheoutputpowerPeandpitchangle�obtainedby
thePI-controlleraregiveninFigure10.2.Thestepinputtotheturbine

192
Chapter10.ControlAboveRatedPower
isthewindspeedwhichchangesfrom16m/sto17m/sat1sec.Itcan
beseenthattheoutputpowerissuppressedbythePIpitchregulatorto
followthepowerreference.However,theovershootoftheoutputpoweris
large,whichisalmostofsameamplitudeastheuncontrolledsystem.The
3P-e�ectisnotincludedinsimulationmodelinordertoshowthesteady
stateresponses.
01
23
45
67
89
10
35
0
40
0
45
0
50
0
55
0
Tim
e [s]
Power [KW]
01
23
45
67
89
10
12
12
.513
13
.514
14
.515
Tim
e [s]
Pitch angle [deg]
Figure10.2.StepresponsesofoutputpowerandpitchanglewithPI-
controller.Thedashedlineintheupperplotisopen-loopresponseofoutput
power.
Thebodeplotsofthetransferfunctionfromthewindtotheoutputpower
forthecontrolledanduncontrolledwindturbinearegiveinFigure10.3.
The�gureshowsthatthePI-controllerattenuatesthevariationsinthe
electricalpowercausedbythewindvariationsuptoabout1.7rad/s.How-
ever,between1.7rad/sand7.5rad/sthevariationsareincreased,which
isundesirable.Itcanbefoundthatthe3Presonanceatthefrequencyof
11rad/sisneitherattenuatednorampli�ed,but1Presonanceatfrequency
of3.685rad/sisampli�ed.Thereisaslightincreaseinamplitudeatthe
structuralresonancefrequencyof6.9rad/s.Simulationshowsthatthese
slightincreaseisnotharmful.
10.1
PIpitchcontrol
193
10
01
01
70
80
90
10
0
11
0
Fre
qu
en
cy [ra
d/s
]
Gain [dB]
Figure10.3.Bodeplotsofthetransferfunctionfrom
�vto�Pe.The
dashedlineisfortheopen-loopsystemandthesolidlineisfortheclosed
loopsystemwithPI-controller.
ThePI-controllerisfurthermoredesignedwithanonlineargainscheduling.
Thenonlinearityreducesthegainwithincreasingpitchtocompensatefor
theincreaseingainthroughthesystem.
Toobtainamorerealisticevaluationofthecontrollerthefullnon-linear
stochasticmodelofthewindturbineisemployedforsimulation.ThePI-
regulatorgivenin(10.1)-(10.1)isimplementedforpowerlimitation.The
resultsareshowninFigure10.4,inwhichacomparisonbetweenthepower
outputfrom
theopen-loopsystem
andtheclosed-loopsystem
showsthe
performanceofthePI-regulator.Thepitchangleofbladesisalsoplotted
inthe�gure.
Itisobviousthatthein uenceofthedisturbancesfromthewindonthe
outputpowerisreducedbythecontroller,i.e.,thecontrollerenhancesthe
disturbancerejectionpropertiesoftheturbineandsmooththegenerated
power.

194
Chapter10.ControlAboveRatedPower
50
60
70
80
90
10
01
10
12
01
30
14
01
50
10
0
20
0
30
0
40
0
50
0
60
0
70
0
tim
e [
s]
Pe [KW]
50
60
70
80
90
10
01
10
12
01
30
14
01
50
5
10
15
20
tim
e [
s]
Pitch angle [deg]
Figure10.4.SimulationofthewindturbinewithaPI-controller.Theupper
plotshowsthepoweroutputfromtheuncontrolled(dashed)andcontrolled
(solid)windturbine.Thelowerplotshowsthepitchangleoftheblades.
Thekeyparametersfromthesimulationof200secaregiveninTable10.1.
Theoutputpowerandgeneratorreactiontorqueareusedasanindicatorof
theperformanceofclosed-loopsystem.Thepitchangleandpitchrateare
giventoshowthepitchperformancesincetherearestrictlimitsonthemin
ordertopreventthecontrolactionfrombeingtoostrong.Thespeedand
displacementoftowerbendingmovementaregiventoseeifthecontroller
excitesthetowerbending.
BycomparingtheparametersinTable10.1withTable7.2obtainedfroman
open-loopsimulation,itcanbefoundthatthestandarddeviationofgenera-
torreactiontorquehasbeendecreasedsigni�cantlybythePI-controller,i.e.,
theloadtransientsthroughouttheturbinehavebeenalleviatedandsmooth
powercanthusbeachieved.ItcanalsobefoundthatthePI-controllerdoes
notgivethesigni�cantincreasesinthetowerbendingmovements.
10.2
LQG
pitchcontrol
195
mean(Pe)[KW]
mean(Tg)[Nm]
mean(!g)[rad/s]
max(ht!t)[cm/s]
399.46
3928.83
105.77
2.59
SD(Pe)[KW]
SD(Tg)[Nm]
SD(!g)[rad/s]
max(ht�t)[cm]
34.92
340.20
0.09
3.65
max(�)[deg]
min(�)[deg]
SD(�)
max(_ �)[deg/s]
19.65
3.88
3.55
5.04
Table10.1.StatisticsobtainedwhilesimulatingthePIpitchcontrolsystem.
Meanwindspeedis16m/s.
However,ithasbeenmentionedby[Leithead,1989a]thatthePI-controller
maynotbeentirelysatisfactorybecauseitisunabletoadddamping.
10.2
LQG
pitchcontrol
LQG
optimalcontrollaw
LinearQuadraticGaussian(LQG)optimalcontrollawis�rmlyestablished
basedonstate-spacedescriptionofsystems.Themaincharacteristicsof
LQGareoptimizationintermsofquadraticperformancecriteriaandincor-
porationoftheKalmanoptimalestimationtheory
[Bitmeadetal.,1990].
Figure10.5depictstheinterconnectionoftheplant,theobserverandthe
controllawforapitchregulatedwindturbine.
Thequadraticcostfunctionwhichweseektominimizeisgivenby
J(N;t)=E
8 < :N�1 X j
=0
fQy(�Pe(t+j))2+Qu(��ref(t+j))2g9 = ;(10.3)
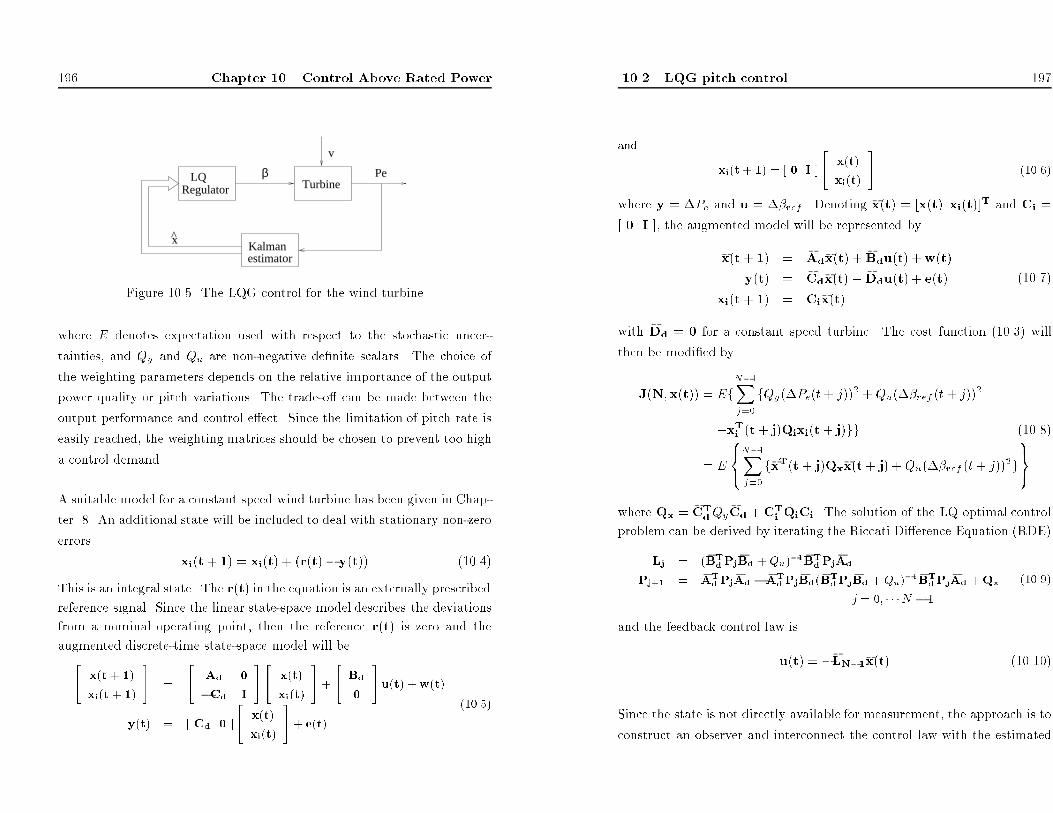
196 Chapter 10. Control Above Rated Power
Turbine
v
RegulatorLQ
Kalmanestimator
^
Peβ
x
Figure 10.5. The LQG control for the wind turbine
where E denotes expectation used with respect to the stochastic uncer-
tainties, and Qy and Qu are non-negative de�nite scalars. The choice of
the weighting parameters depends on the relative importance of the output
power quality or pitch variations. The trade-o� can be made between the
output performance and control e�ect. Since the limitation of pitch rate is
easily reached, the weighting matrices should be chosen to prevent too high
a control demand.
A suitable model for a constant speed wind turbine has been given in Chap-
ter 8. An additional state will be included to deal with stationary non-zero
errors
xi(t+ 1) = xi(t) + (r(t)� y(t)) (10.4)
This is an integral state. The r(t) in the equation is an externally prescribed
reference signal. Since the linear state-space model describes the deviations
from a nominal operating point, then the reference r(t) is zero and the
augmented discrete-time state-space model will be"x(t+ 1)
xi(t + 1)#
=
"Ad 0
�Cd I#"x(t)
xi(t)#
+"Bd
0
#u(t) +w(t)
y(t) = [ Cd 0 ]"x(t)
xi(t)#
+ e(t)
(10.5)
10.2 LQG pitch control 197
and
xi(t+ 1) = [ 0 I ]"x(t)
xi(t)#
(10.6)
where y = �Pe and u = ��ref . Denoting �x(t) = [x(t) xi(t)]T and Ci =
[ 0 I ], the augmented model will be represented by
�x(t+ 1) = �Ad�x(t) + �Bdu(t) +w(t)
y(t) = �Cd�x(t) + �Ddu(t) + e(t)
xi(t+ 1) = Ci�x(t)
(10.7)
with �Dd = 0 for a constant speed turbine. The cost function (10.3) will
then be modi�ed by
J(N;x(t)) = EfN�1X
j=0fQy(�Pe(t+ j))2 + Qu(��ref (t + j))2
+xTi (t+ j)Qixi(t+ j)gg (10.8)
= E8<
:N�1X
j=0f�xT(t+ j)Qx�x(t+ j) +Qu(��ref (t+ j))2g
9=;
where Qx = �CTdQy�Cd +CTi QiCi. The solution of the LQ optimal control
problem can be derived by iterating the Riccati Di�erence Equation (RDE)
Lj = (�BTdPj�Bd +Qu)�1 �BTdPj�Ad
Pj+1 = �ATdPj�Ad �
�ATdPj�Bd(�BTdPj�Bd +Qu)�1 �BTdPj�Ad +Qx
j = 0; � � �N � 1
(10.9)
and the feedback control law isu(t) = ��LN�1�x(t) (10.10)
Since the state is not directly available for measurement, the approach is to
construct an observer and interconnect the control law with the estimated

198 Chapter 10. Control Above Rated Power
state
u(t) = �[L Li]"^x(t)
^xi(t)#
(10.11)
The Kalman estimation method given in section 9.2 can be used to estimate
the state.
The control strategy with di�erent weights on the the pitch reference is
illustrated by the step responses in Figure 10.6. The step input to the
turbine is wind speed which changes from 16 m/s to 17 m/s at 1 sec.
0 1 2 3 4 5 6 7 8 9 10300
350
400
450
500
550
Time [s]
Powe
r [KW
]
0 1 2 3 4 5 6 7 8 9 1012
13
14
15
16
Time [s]
Pitc
h an
gle
[deg
]
Figure 10.6. Step responses of output power Pe and pitch angle � obtained
by LQG controller with di�erent weight on pitch reference. Qy = 1, Qu =
4:3 � 1011 (|), 20 � 1011 (- -), 1010 (-�). The dotted line in the upper plot is
the power output in open-loop.
With high weight on the control action the turbine follows the power ref-
erence slowly (dashed line). However, the large control action excites the
tower bending movements and leads to the vibrations on pitch control action
and turbine dynamics (dash-dot line). In practice, the large pitch action
is not allowed to avoid heavy mechanical loads. A compromise is made
10.2 LQG pitch control 199
between power smoothing and load alleviation by choosing Qy = 1 and
Qu = 4:3 �1011. The step response with these weighting parameters is given
by the solid line. It can be found that the output power has been sup-
pressed and the amplitude of overshoot is decreased by the LQG regulator
compared to the PI-controller with the similar pitch action.
Gain scheduling
An e�ective control algorithm must re ect both the plant dynamic char-
acteristics as well as the anticipated working environment. The control
problem is therefore divided into two time scales corresponding to slow mean
wind speed changes and rapid turbulent wind speed variations. Changes in
mean wind speed cause the mean pitch angle of the blade to alter to main-
tain the mean power output at its rated value. These mean pitch positions
are treated as steady state operating points, which can be determined by
searching scheduling table 9.7 with the average wind speed obtained by
�ltering the measured point wind speed through a low-pass �lter with a
period of 10 minutes.
Regulator Process+Reference
Gainschedule
ParamtersRegulator
conditionOperating
yu
-
Figure 10.7. Block diagram of a gain scheduling system
Secondly, the aerodynamic behaviour is highly nonlinear. When a linear
representation of rotor aerodynamic torque is employed, the partial deriva-
tives @Tw=@v, @Tw=@� and @Tw=@!r of the aerodynamic torque with respect

200
Chapter10.ControlAboveRatedPower
towindspeed,pitchangleandrotorspeedareactuallytime-varyingand
dependontheoperatingconditions.Sincewehaveknownhowtherotor
aerodynamicschangewiththeoperatingconditionsoftheprocess,itis
thenpossibletochangetheparametersofthecontrollerbymonitoringthe
operatingconditions.Thisiscalledgainscheduling.Theprincipleofgain
schedulingisillustratedinFigure10.7.Thegainschedulinghasalinearreg-
ulatorwhoseparametersarechangedasafunctionofoperatingconditions
inanopen-loopfashion.
Forawindturbine,theestimatedwindspeedortheaveragewindspeed
canbeusedasschedulingvariablestomonitortheoperatingconditionsof
theprocess.TheschedulingtableisplottedinFigure9.7inChapter9.
Theparameters@Tw=@v,@Tw=@�and@Tw=@!rinthelinearaerodynamic
torquemodelcanbefoundbysearchingschedulingtablewiththeestimated
windspeedorthemeanwindspeedateachsample.Thismeansthatthe
linearmodelusedinestimatorandregulatoriscalibratedforeachoperating
pointandthenonlinearaerodynamicscanthenbecompensated.
Simulationresults
SimulationiscarriedoutatthesameoperatingpointasthePI-controller,
andthesamewindsequenceisusedforthesimulation.Thesimulation
resultscanthusbecomparedwiththeresultsobtainedbyusingthePI-
controller.Inordertomakecomparisons,thesimilarcontrolactionsare
requiredandmaximumvalueofthepitchrateislimitedtoabout5o=sfor
boththePIandtheLQGcontrol.TheLQGcontrollerwithweighting
parametersQy
=
1andQu
=
4:3�1011
isperformed,whichgivesthe
similarpitchactionasthePI-controllerdoes.Thegainschedulingisnot
implementedinthisexample.
10.2
LQG
pitchcontrol
201
ThesimulationresultsareshowninFigure10.8,andkeyparametersfrom
thesimulationaregiveninTable10.2.
50
60
70
80
90
10
01
10
12
01
30
14
01
50
10
0
20
0
30
0
40
0
50
0
60
0
70
0
Tim
e [
s]
Pe [KW]
50
60
70
80
90
10
01
10
12
01
30
14
01
50
5
10
15
20
Tim
e [
s]
Pitch angle [deg]
Figure10.8.SimulationofthewindturbinewithaLQG-controller.The
upperplotshowsthepoweroutputfrom
theuncontrolled(dashed)and
controlled(solid)windturbine.Thelowerplotshowsthepitchangleofthe
blades.
mean(Pe)[KW]
mean(Tg)[Nm]
mean(!g)[rad/s]
max(ht!t)[cm]
399.16
3927.07
105.77
3.74
SD(Pe)[KW]
SD(Tg)[Nm]
SD(!g)[rad/s]
max(ht�t)[cm]
24.75
241.11
0.06
3.45
max(�)[deg]
min(�)[deg]
SD(�)
max(_ �)[deg/s]
19.43
5.03
3.34
5.05
Table10.2.StatisticsobtainedwhilesimulatingtheLQG
pitchcontrol
system.Meanwindspeedis16m/s.

202 Chapter 10. Control Above Rated Power
It can be found that the standard deviation of output power is reduced
by the LQG controller compared to the PI-controller. This corresponds to
the decrease of the variations in generator reaction torque. By keeping the
generator torque variations small, the shaft loads are reduced and thereby
the turbine life will be increased. As the PI-controller, the LQG controller
does not give the signi�cant increases in tower bending movements.
10.3 Combined variable speed and pitch con-
trol
The purpose of this section is to investigate the control system of a variable
speed wind turbine which employs pitch regulation and generator reaction
torque regulation in high wind speeds.
Turbine
v
RegulatorLQ
Kalmanestimator
y
x̂
u
Figure 10.9. The LQG control for the wind turbine
Variable speed pitch regulation presents a multivariable control problem as
an additional generator torque control loop is added to the existing pitch
control loop. The ability to vary the rotor speed of a wind turbine increases
the operational exibility. Figure 10.9 shows the block scheme of combined
10.3 Combined variable speed and pitch control 203
variable speed and pitch control of a wind turbine by implementing the
LQG control method.
The dynamics of the generator and frequency converter have been discussed
in section 7.6. The linear design model for a variable speed wind turbine
given in Chapter 8 has the pitch reference and generator torque reference
as inputs and the angular velocity and reaction torque of the generator as
outputs
u ="��ref
�Tg;ref#
y ="�!g
�Tg#
(10.12)
The model is augmented by including integral actions to give zero steady-
state errors. The model can be represented by ( 10.7). The performance
criterion is speed wind turbine
J(N;x(t)) = EfN�1X
j=0fyT(t+ j)Qyy(t+ j)
+uT(t+ j)Quu(t+ j) + xTi (t+ j)Qixi(t+ j)gg (10.13)
= EfN�1X
j=0f�xT(t+ j)Qx�x(t+ j) + 2�xT(t+ j)Qxuu(t+ j)
+uT(t+ j)Q0uu(t+ j)gg (10.14)
where matrices Qx = �CTdQy�Cd + CTi QiCi, Qxu = �CTdQy�Dd and Q0u =
�DTdQy�Dd +Qu, and
Qy ="qy1 0
0 qy2#
Qu ="qu1 0
0 qu2#
Qi ="qi1 0
0 qi2#
(10.15)
The choice of the weighting matrices Qy and Qu depend on the relative
importance of the output power quality or input restrictions. qu1 and qu2
in matrix Qu can be chosen such that the the pitch position and pitch rate
should be restricted and the rotor speed will be remained within prede�ned
limitation. Qi will be chosen to punish the stationary error.
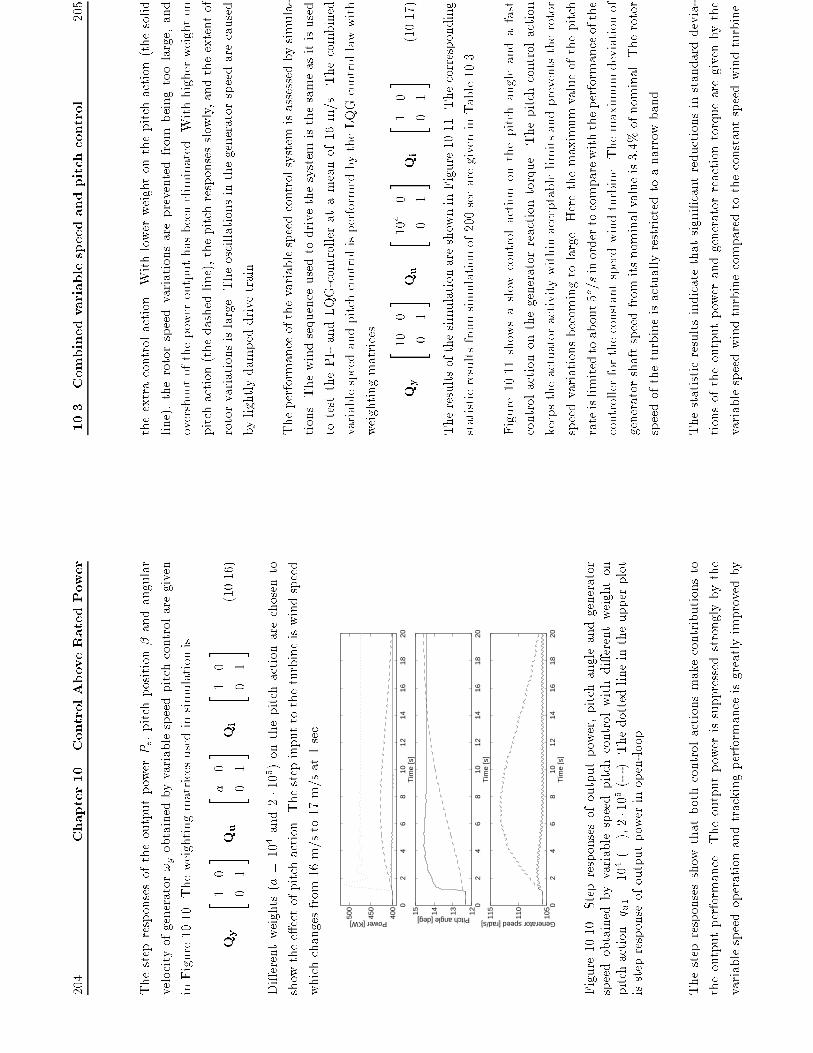
204
Chapter10.ControlAboveRatedPower
ThestepresponsesoftheoutputpowerPe,pitchposition�andangular
velocityofgenerator!gobtainedbyvariablespeedpitchcontrolaregiven
inFigure10.10.Theweightingmatricesusedinsimulationis
Qy
=" 1
0
0
1#
Qu
=" a0
0
1#
Qi=
" 1
0
0
1#
(10.16)
Di�erentweights(a=104and2�105)onthepitchactionarechosento
showthee�ectofpitchaction.Thestepinputtotheturbineiswindspeed
whichchangesfrom16m/sto17m/sat1sec.
02
46
810
1214
1618
2040
0
450
500
Tim
e [s
]
Power [KW]
02
46
810
1214
1618
2012131415
Tim
e [s
]
Pitch angle [deg]
02
46
810
1214
1618
2010
5
110
115
Tim
e [s
]
Generator speed [rad/s]
Figure10.10.Stepresponsesofoutputpower,pitchangleandgenerator
speedobtainedbyvariablespeedpitchcontrolwithdi�erentweighton
pitchaction.q u1=104(|),2�105(--).Thedottedlineintheupperplot
isstepresponseofoutputpowerinopen-loop.
Thestepresponsesshowthatbothcontrolactionsmakecontributionsto
theoutputperformance.Theoutputpowerissuppressedstronglybythe
variablespeedoperationandtrackingperformanceisgreatlyimprovedby
10.3
Combinedvariablespeedandpitchcontrol
205
theextracontrolaction.Withlowerweightonthepitchaction(thesolid
line),therotorspeedvariationsarepreventedfrom
beingtoolarge,and
overshootofthepoweroutputhasbeeneliminated.Withhigherweighton
pitchaction(thedashedline),thepitchresponsesslowly,andtheextentof
rotorvariationsislarge.Theoscillationsinthegeneratorspeedarecaused
bylightlydampeddrivetrain.
Theperformanceofthevariablespeedcontrolsystemisassessedbysimula-
tions.Thewindsequenceusedtodrivethesystemisthesameasitisused
totestthePI-andLQG-controlleratameanof16m/s.Thecombined
variablespeedandpitchcontrolisperformedbytheLQGcontrollawwith
weightingmatrices
Qy
=" 10
0
0
1#
Qu
=" 104
0
0
1#
Qi=
" 1
0
0
1#
(10.17)
TheresultsofthesimulationareshowninFigure10.11.Thecorresponding
statisticresultsfromsimulationof200secaregiveninTable10.3.
Figure10.11showsaslowcontrolactiononthepitchangleandafast
controlactiononthegeneratorreactiontorque.Thepitchcontrolaction
keepstheactuatoractivitywithinacceptablelimitsandpreventstherotor
speedvariationsbecomingtolarge.Herethemaximumvalueofthepitch
rateislimitedtoabout5o=sinordertocomparewiththeperformanceofthe
controllerfortheconstantspeedwindturbine.Themaximumdeviationof
generatorshaftspeedfromitsnominalvalueis3:4%ofnominal.Therotor
speedoftheturbineisactuallyrestrictedtoanarrowband.
Thestatisticresultsindicatethatsigni�cantreductionsinstandarddevia-
tionsoftheoutputpowerandgeneratorreactiontorquearegivenbythe
variablespeedwindturbinecomparedtotheconstantspeedwindturbine.
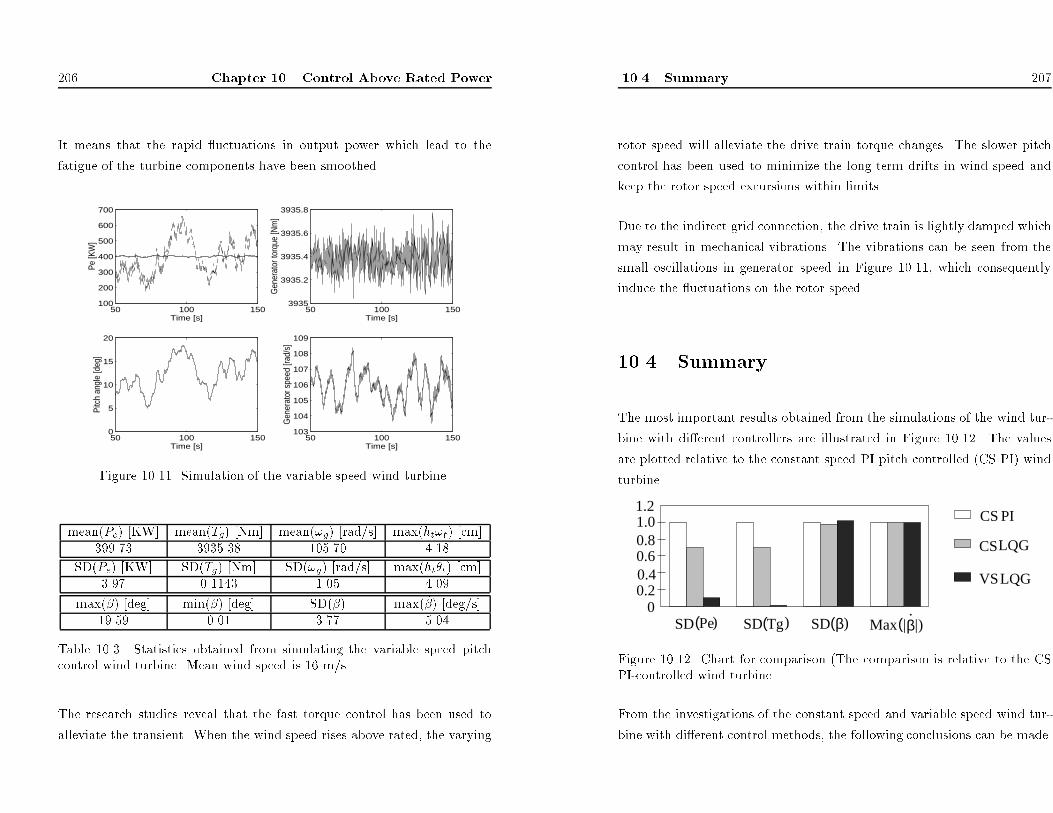
206 Chapter 10. Control Above Rated Power
It means that the rapid uctuations in output power which lead to the
fatigue of the turbine components have been smoothed.
50 100 150100
200
300
400
500
600
700
Time [s]
Pe [K
W]
50 100 1500
5
10
15
20
Time [s]
Pitc
h an
gle
[deg
]
50 100 1503935
3935.2
3935.4
3935.6
3935.8
Time [s]
Gen
erat
or to
rque
[Nm
]
50 100 150103
104
105
106
107
108
109
Time [s]
Gen
erat
or s
peed
[rad
/s]
Figure 10.11. Simulation of the variable speed wind turbine.
mean(Pe) [KW] mean(Tg) [Nm] mean(!g) [rad/s] max(ht!t) [cm]
399.73 3935.38 105.70 4.18
SD(Pe) [KW] SD(Tg) [Nm] SD(!g) [rad/s] max(ht�t) [cm]
3.97 0.1143 1.05 4.09
max(�) [deg] min(�) [deg] SD(�) max( _�) [deg/s]
19.59 0.01 3.77 5.04
Table 10.3. Statistics obtained from simulating the variable speed pitch
control wind turbine. Mean wind speed is 16 m/s.
The research studies reveal that the fast torque control has been used to
alleviate the transient. When the wind speed rises above rated, the varying
10.4 Summary 207
rotor speed will alleviate the drive train torque changes. The slower pitch
control has been used to minimize the long term drifts in wind speed and
keep the rotor speed excursions within limits.
Due to the indirect grid connection, the drive train is lightly damped which
may result in mechanical vibrations. The vibrations can be seen from the
small oscillations in generator speed in Figure 10.11, which consequently
induce the uctuations on the rotor speed.
10.4 Summary
The most important results obtained from the simulations of the wind tur-
bine with di�erent controllers are illustrated in Figure 10.12. The values
are plotted relative to the constant speed PI pitch controlled (CS PI) wind
turbine.
0.20.4
0.81.0
0.6
1.2
CS
0MaxSD(β) |β|)(
.(SD Pe) (SD Tg)
CS PI
LQG
VSLQG
Figure 10.12. Chart for comparison (The comparison is relative to the CS
PI-controlled wind turbine.
From the investigations of the constant speed and variable speed wind tur-
bine with di�erent control methods, the following conclusions can be made.

208
Chapter10.ControlAboveRatedPower
ThePIpitchcontrolisstillafavouredmeansofregulationforconstant
speedwindturbinesbecauseofthesimplicityofthemethod.
TheLQGpitchcontrolachievesasigni�cantreductionintheextentofthe
transientsofdrivetrainloadandhencesmoothesthepower.Theinvestiga-
tionsindicatethattheLQGcontrolismoreappropriatethanthePIcontrol.
However,thesimulationresultsarebasedonanaccuratemodelwhichmay
notalwaysbeobtainedinpractice.FortheLQGcontrolmethod,astate
estimatormustbeemployedinanypracticalimplementation.
Foravariablespeedwindturbine,thesystemtobecontrolledismultivari-
ablewithinputsbeingthereferencegeneratortorqueandpitchdemandand
outputsbeingthegeneratorreactiontorqueandgeneratorspeed.Consid-
erableimprovedperformanceisprovidedbyperformingtheLQGvariable
speedpitchcontrol.Theabilitytooperateatvariablerotorspeede�ec-
tivelyaddscompliancetothepowertraindynamicsofthewindturbine
andachievesamoregentlepitchmotionregime.Thepitchactioninvari-
ablespeedoperationisusedtopreventtherotorspeedvariationsfrombeing
toolarge.Therotorspeedisactuallyfreetovarywithinasmallinterval.
Thecombinedvariablespeedpitchcontrolcanalsoberealizedbyusing
thePIcontrolmethod.Twocontrolloopswiththepitchreferenceand
generatortorquereferenceasinputswillbeincludedinthecontrolscheme.
ThePImultivariablecontrolisnotdiscussedinthisthesis.
Anotheradvantageofthevariablespeedoperationisthatrotorspeedcan
beadjustedtoreducenoiselevelsandhencemakethewindturbinemore
environmentallyagreeable,becausethenoiselevelproducedbywindturbine
isafunctionoftherotorspeed.
10.4
Summary
209
Thebene�tsofusingvariablespeedwindturbinemustbeo�setagainst
thedisadvantages:themoreexpensivegeneratorsystemduetotheintro-
ductionofpowerconversiondeviceandreducedreliabilityofthevariable
speedelectricalmachinery.However,itisanticipatedthatthecostofpower
conversiondevicewilldecreaseastechnologyadvances.
Aswindspeedrises,fora�xedcontrollerthestandarddeviationofthe
poweroutputalsorisesduetotheincreasedlevelofturbulence.Itisthere-
foreattractivetoincreasethecontrolleractivitybyapplyinggainscheduling
methodwhichgivesimproveddisturbancerejection.Thegainscheduling
methodisinanopen-loopfashion,thepossiblyoccurredsteadystateerrors
ofoperatingpointscanbeeliminatedbytheintegralactions.

210
Chapter10.ControlAboveRatedPower
Chapter11
ControlBelowRated
Power
Itwasmentionedpreviouslythatthewindturbineoperationwasdivided
intotworegions,i.e.,aboveratedwindspeedandbelowratedwindspeed.
Sinceawindturbinespendsmostofitslifeoperatinginwindspeedsless
thanrated,itseemsmoreimportanttoinvestigatetheroleande�ectsof
controlsystemsinpartialload.
Belowratedwindspeedthecontrolstrategyistomaximizeenergycapture
fromthewindandminimizetheturbinetransientloads.Inpartialload
itistheaerodynamicpowerthatshouldbemaximized,sincetheenergyis
capturedbytherotor.However,theoverallproductionofelectricalenergy
isimproved,sincethecapturedenergyisonlytemporarilystoredinrotor.
211

212
Chapter11.ControlBelowRatedPower
TherotorcharacteristicsofawindturbinearesummarizedbytheCpsur-
face,wherethepowercoe�cientCp(�;�)de�ningtheabilityoftheturbine
toconvertthekineticenergyofthewindtomechanicalenergycapturedby
therotorisanonlinearfunctionofpitchangle�andtipspeedratio�.In
ordertomaximizetheenergycapture,thesetwovariablesshouldbekept
attheiroptimalvaluestoachievethemaximumvalueofCp.Thepitch
anglecanbeeasily�xedattheoptimalvalue.However,sincethetipspeed
ratiode�nedby�=v=(!rR)isa�ectedbythewindspeedexperienced
bytheturbineandtherotorspeed,therotorspeedistheonlywaywhich
canberegulatedtoachievetheoptimal�.Hence,avariablespeedturbine
isrequiredtotrackthevariationsofwindspeedandhencemaximizethe
aerodynamicpower.
00.
10.
20.
30.
40
0.1
0.2
0.3
0.4
0.5
λ
Cp
Cp,
max
λop
t
Figure11.1.Cp(�)-curveatpitchangleof0:5o
ACp(�;�0)-curveoftheWD34windturbineatoptimalpitchangleof
�0=0:5oisshowninFigure11.1.Therotordevelopsmaximummechanical
poweronlyatspeci�ctip-speedratio�opt.Iftherotorspeedisheldcon-
stant,theoperatingpointvariesontheCp(�)-curvefromcut-intorated
windspeed,resultinginreducede�ciency.Ontheotherhand,ifrotor
213
speedisallowedtovary,itcantrackthewindvelocitytokeepthetip-speed
ratioatitsoptimumvalue.
Sincethesensitivityoftheaerodynamictorquetothechangeofthepitch
angleisloweratlowwindspeeds,nocontrolactiononthepitchanglewill
thenberequirednormally.
Withthepitchangleatitsoptimalvalue,thecontrolobjectiveistomaxi-
mizethepowercoe�cientatallwindspeedsbykeepingthetipspeedatits
optimalvalue.Ontheotherhand,thecontrolobjectiveisalsooptimized
withrespecttotheminimizationoftheturbinetransientloads.Obviously,
thetwoobjectivesmentionedabovecontradicteachother.Inordertokeep
thetipspeedratioconstant,therotorspeedmustexactlyfollowthewind
turbulence,whichrequireslargevariationsinrotorspeed,consequently,in-
creasesthetransientloads.Thereforeatrade-o�mustbemadebetween
twoobjectives.Howcloseitisdesirabletotracktheoptimaltipspeedratio
isrelatedtothepermissibleloads.Belowratedpoweravariablespeedwind
turbineisasingleinputsingleoutputsystem.
However,theenergyoutputofthewindturbinecanbeincreasedbyvariable
speedoperationdependingonwindvelocity,sincetheconstantspeedwind
turbineisnormallyoperatedmoree�ectivelyforasinglewindspeed.The
increaseinenergycaptureforaturbineisdrawninFigure11.2.Thehatched
areaistheincreasedenergycapturebyavariablespeedturbine.Ithas
beenpointedoutby
[ErnstandLeonhard,1988]thattheannualenergy
productionofwindturbinesincreasedbyvariablespeedoperationis5%�
10%comparedwiththeoutputofconstantspeedturbines.
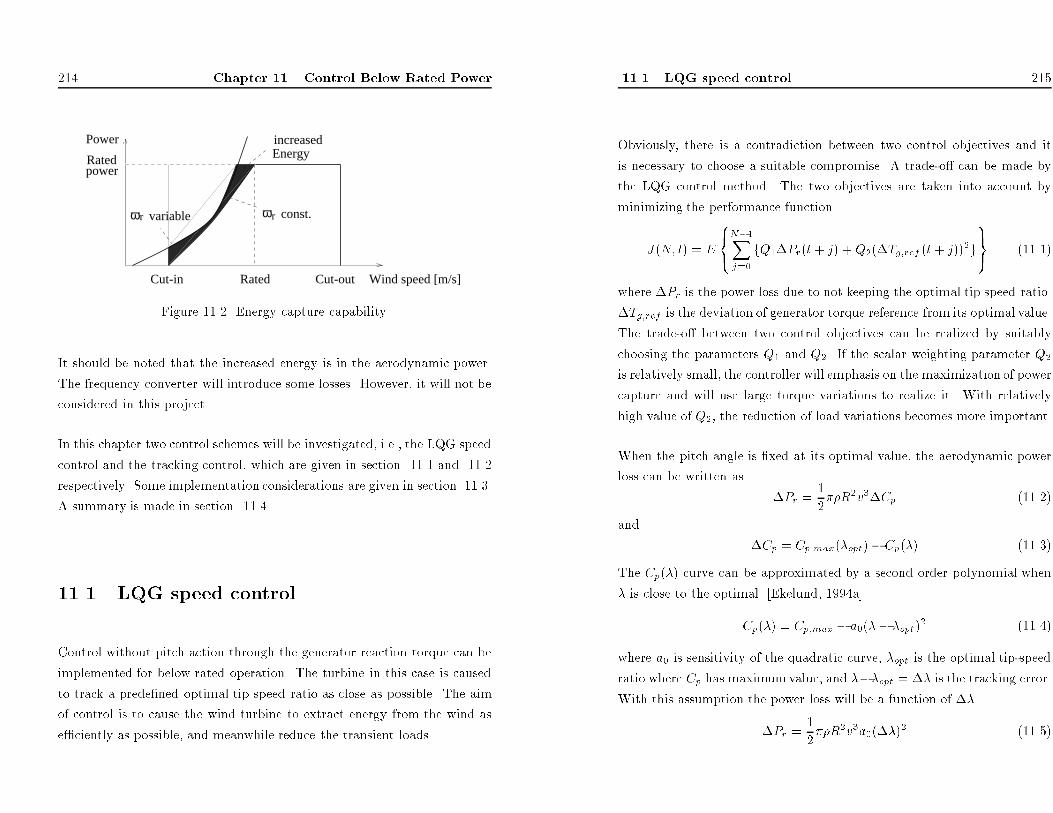
214 Chapter 11. Control Below Rated Power
r const.rω ω
increasedPower
Cut-in Rated Cut-out Wind speed [m/s]
Ratedpower
variable
Energy
Figure 11.2. Energy capture capability.
It should be noted that the increased energy is in the aerodynamic power.
The frequency converter will introduce some losses. However, it will not be
considered in this project.
In this chapter two control schemes will be investigated, i.e., the LQG speed
control and the tracking control, which are given in section 11.1 and 11.2
respectively. Some implementation considerations are given in section 11.3.
A summary is made in section 11.4.
11.1 LQG speed control
Control without pitch action through the generator reaction torque can be
implemented for below rated operation. The turbine in this case is caused
to track a prede�ned optimal tip speed ratio as close as possible. The aim
of control is to cause the wind turbine to extract energy from the wind as
e�ciently as possible, and meanwhile reduce the transient loads.
11.1 LQG speed control 215
Obviously, there is a contradiction between two control objectives and it
is necessary to choose a suitable compromise. A trade-o� can be made by
the LQG control method. The two objectives are taken into account by
minimizing the performance function
J(N; t) = E8<
:N�1X
j=0fQ1�Pr(t + j) + Q2(�Tg;ref (t+ j))2g
9=; (11.1)
where �Pr is the power loss due to not keeping the optimal tip speed ratio.
�Tg;ref is the deviation of generator torque reference from its optimal value.
The trade-o� between two control objectives can be realized by suitably
choosing the parameters Q1 and Q2. If the scalar weighting parameter Q2
is relatively small, the controller will emphasis on the maximization of power
capture and will use large torque variations to realize it. With relatively
high value of Q2, the reduction of load variations becomes more important.
When the pitch angle is �xed at its optimal value, the aerodynamic power
loss can be written as
�Pr =1
2��R2v3�Cp (11.2)
and
�Cp = Cp;max(�opt)� Cp(�) (11.3)
The Cp(�) curve can be approximated by a second order polynomial when
� is close to the optimal [Ekelund, 1994a]
Cp(�) = Cp;max � a0(� � �opt)2 (11.4)
where a0 is sensitivity of the quadratic curve, �opt is the optimal tip-speed
ratio where Cp has maximumvalue, and ���opt = �� is the tracking error.
With this assumption the power loss will be a function of ��
�Pr =1
2��R2v3a0(��)2 (11.5)

216
Chapter11.ControlBelowRatedPower
Thisimpliesthatthepowerlossisactuallydeterminedbythedeviationof
tip-speedratio��fromitsoptimalvalue.Theperformancefunction(11.1)
canthenbemodi�edby
J(N;t)=E
8 < :N�1 X j
=0
fQ1(��(t+j))2+Q2(�Tg;ref(t+j))2g9 = ;(11.6)
Sincethetipspeedratiocanbelinearizedatanoperatingpoint
��=
@�
@!r
? ? ? ? op�!r+
@�
@v
? ? ? ? op�v=Hx
(11.7)
where
H=[0
@�
@!r
00
@�
@v
]
x=[�� ��!r�!g�_v�v]T
whichleadstothecriterion
J(N;x(t))=E
8 < :N�1 X j
=0
fxT(t+j)Qxx(t+j)+Q2(�Tg;ref(t+j))2g9 = ; (1
1.8)
whereQx=HTQ1H.xisthestatevectorofthecompositestate-space
modelinpartialload.ThemodelhasbeengiveninChapter8.
TheLQcontrollawisimplementedbycombiningtheKalman�ltertoesti-
matethestatevector
u(t)=�L^x(t)
(11.9)
ThestepresponsesofgeneratortorqueTgandtipspeedratio�withdi�er-
entvaluesofweightingparameterQ2aregiveninFigure11.3andFigure
11.4respectively,wherethewindspeedchangesfrom9m/sto10m/sat1
11.1
LQG
speedcontrol
217
sec.The3P-e�ectisnotincludedinsimulationmodelforthestepresponses.
The�guresshowthatalargecontrolactionprovidesasmallsteady-state
erroroftipspeedratio.Theoptimalvalueoftipspeedratiois0.1357.
05
10
15
20
25
13
50
14
00
14
50
15
00
15
50
16
00
16
50
17
00
17
50
18
00
Tim
e [
s]
Tg [Nm]
1e
−9
3e
−9
6e
−9
1.5
e−
8
Figure11.3.ThestepresponseofgeneratortorqueTgwithdi�erentvalues
ofQ2whileQ1=1 0
51
01
52
02
50
.12
0.1
25
0.1
3
0.1
35
0.1
4
0.1
45
0.1
5
0.1
55
Tim
e [
s]
λ
1e
−9
3e
−9
6e
−9 1
.5e
−8
Figure11.4.Thestepresponseoftipspeedratio�withdi�erentvaluesof
Q2whileQ1=1
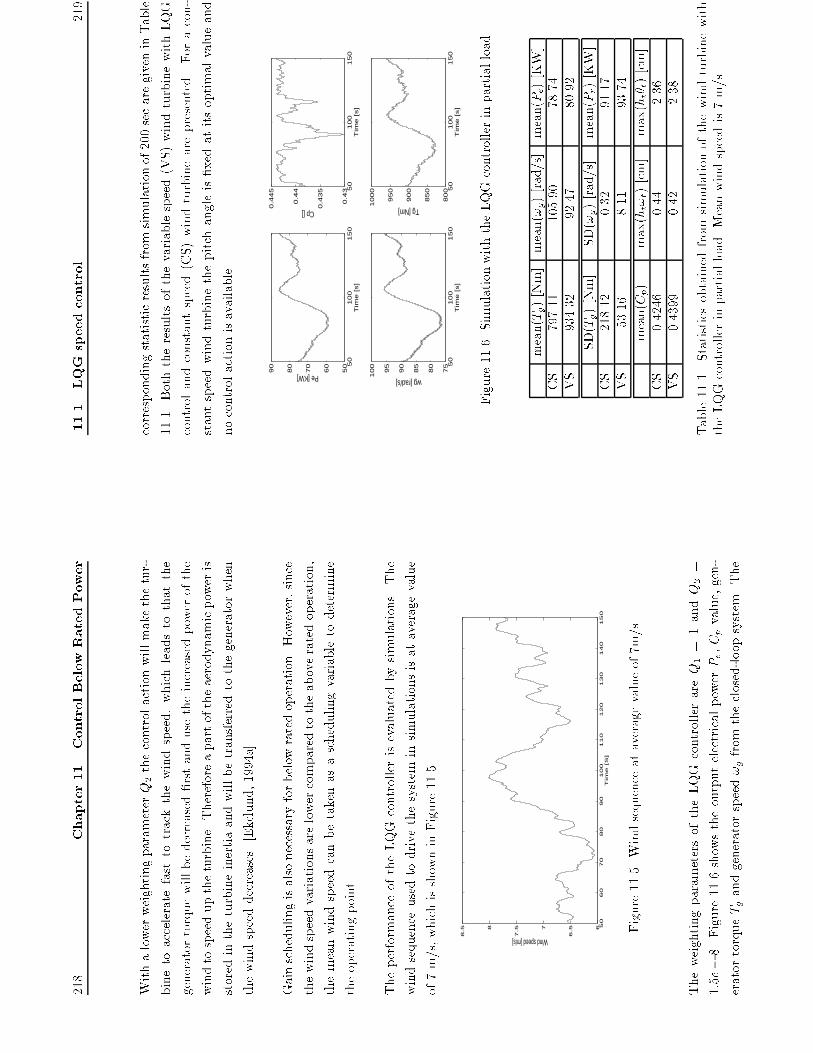
218
Chapter11.ControlBelowRatedPower
WithalowerweightingparameterQ2thecontrolactionwillmakethetur-
binetoacceleratefasttotrackthewindspeed,whichleadstothatthe
generatortorquewillbedecreased�rstandusetheincreasedpowerofthe
windtospeeduptheturbine.Thereforeapartoftheaerodynamicpoweris
storedintheturbineinertiaandwillbetransferredtothegeneratorwhen
thewindspeeddecreases[Ekelund,1994a].
Gainschedulingisalsonecessaryforbelowratedoperation.However,since
thewindspeedvariationsarelowercomparedtotheaboveratedoperation,
themeanwindspeedcanbetakenasaschedulingvariabletodetermine
theoperatingpoint.
TheperformanceoftheLQGcontrollerisevaluatedbysimulations.The
windsequenceusedtodrivethesysteminsimulationsisataveragevalue
of7m/s,whichisshowninFigure11.5.
50
60
70
80
90
10
01
10
12
01
30
14
01
50
6
6.57
7.58
8.5
Tim
e [S
]
Wind speed [m/s]
Figure11.5.Windsequenceataveragevalueof7m/s
TheweightingparametersoftheLQGcontrollerareQ1
=1andQ2
=
1:5e�8.Figure11.6showstheoutputelectricalpowerPe,Cpvalue,gen-
eratortorqueTgandgeneratorspeed!gfromtheclosed-loopsystem.The
11.1
LQG
speedcontrol
219
correspondingstatisticresultsfromsimulationof200secaregiveninTable
11.1.Boththeresultsofthevariablespeed(VS)windturbinewithLQG
controlandconstantspeed(CS)windturbinearepresented.Foracon-
stantspeedwindturbinethepitchangleis�xedatitsoptimalvalueand
nocontrolactionisavailable.
50
10
01
50
50
60
70
80
90
Tim
e [
s]
Pe [KW]
50
10
01
50
0.4
3
0.4
35
0.4
4
0.4
45
Tim
e [
s]
Cp []
50
10
01
50
75
80
85
90
95
10
0
Tim
e [
s]
wg [rad/s]
50
10
01
50
80
0
85
0
90
0
95
0
10
00
Tim
e [
s]
Tg [Nm]
Figure11.6.SimulationwiththeLQGcontrollerinpartialload.
mean(Tg)[Nm]
mean(!g)[rad/s]
mean(Pe)[KW]
CS
797.11
105.90
78.74
VS
934.32
92.47
80.92
SD(Tg)[Nm]
SD(!g)[rad/s]
mean(Pr)[KW]
CS
218.12
0.32
91.17
VS
53.16
8.11
93.74
mean(Cp)
max(ht!t)[cm]
max(ht�t)[cm]
CS
0.4246
0.44
2.36
VS
0.4399
0.42
2.38
Table11.1.Statisticsobtainedfromsimulationofthewindturbinewith
theLQGcontrollerinpartialload.Meanwindspeedis7m/s.

220
Chapter11.ControlBelowRatedPower
Thesimulationresultsindicatetheenergyincreasedbyvariablespeedoper-
ationisabout2.8%comparedtotheoutputoftheconstantspeedturbine.
However,evenwiththelittleincreaseofenergy,themeanvalueofCpis
ratherclosetoitsoptimalvalueof0:4440.Thereasonisthatthemeanvalue
ofCpfortheconstantspeedturbineatthisoperatingpointis0.4246,which
meansthereisnotsomuchextraenergythatcanbecapturedbyvariable
speedoperation.However,theenergyoutputofthewindturbinescanbe
increasedbyvariable-speedoperationdependingonwindvelocity.Forthe
WD34constantspeedwindturbine,whenthewindspeedisabout8.5m/s,
thetip-speedratioisratherclosetoitsoptimalvalue.Theincreasedenergy
byvariablespeedoperationnearthiswindspeedisverylittlecompared
totheconstantspeedwindturbine.However,thecapturedenergywillbe
increasedwhenthewindspeedleavesthisvalue.
mean(Tg)[Nm]
mean(!g)[rad/s]
mean(Pe)[KW]
CS
454.20
105.94
44.89
VS
695.16
78.74
51.28
SD(Tg)[Nm]
SD(!g)[rad/s]
mean(Pr)[KW]
CS
138.37
0.37
51.88
VS
48.98
5.81
59.36
mean(Cp)
max(ht!t)[cm]
max(ht�t)[cm]
CS
0.3784
0.30
1.89
VS
0.4409
0.28
1.70
Table11.2.Statisticsobtainedfromsimulationofthewindturbinewith
theLQGcontrollerinpartialload.Meanwindspeedis6m/s.
Anothersimulationiscarriedoutattheaveragewindspeedof6m/sandthe
sameweightingparametersoftheLQGcontrollerareused.Somekeyresults
fromsimulationsoftheconstantspeedandvariablespeedwindturbinewith
thesamewindsequencearegiveninTable11.2.Itcanbeeasilycalculated
11.2
Trackingcontrol
221
thatatthisoperatingpointtheincreasedenergyobtainedbyvariablespeed
operationisabout14.4%comparedtotheconstantspeedturbine.
Withvariablespeed,thetorquetransientsaresmoothedout.Theturbine
momentofinertiaactsasalow-pass�lter.However,withlargeinertia,the
angularvelocityofrotorcannotfollowthewindspeedvariationquickly,
whichwillleadtoatrackingerror.
Figure11.6showsthefastoscillationsingeneratortorquewhichiscaused
bythedisturbancesfrom
thetowershadow.Theoscillationsinducethe
mechanicalvibrationsontherotorshaft.
11.2
Trackingcontrol
Inthissectiontheoptimalcontrolproblemwillbetransformedtoatracking
problem,inwhichtheoptimaltipspeedratiowillbemaintainedbytracking
therotorspeedreference.
Inordertodeterminetheoptimaltipspeedratio�opt,thewindspeed
experiencedbytheturbineisrequiredtobeknown.However,sinceadirect
measurementofthee�ectivewindspeedisnotpossible,thewindspeed
mustbeestimatedfrom
measurementsmadeonthewindturbineitself.
Theoperatingpointisthendeterminedfromthisestimate.Theproblemof
windspeedestimationhasalreadybeendiscussedinChapter9.Hence,a
controllercanbeimplementedtotrackthe�optaccordingtotheestimated
windspeed.
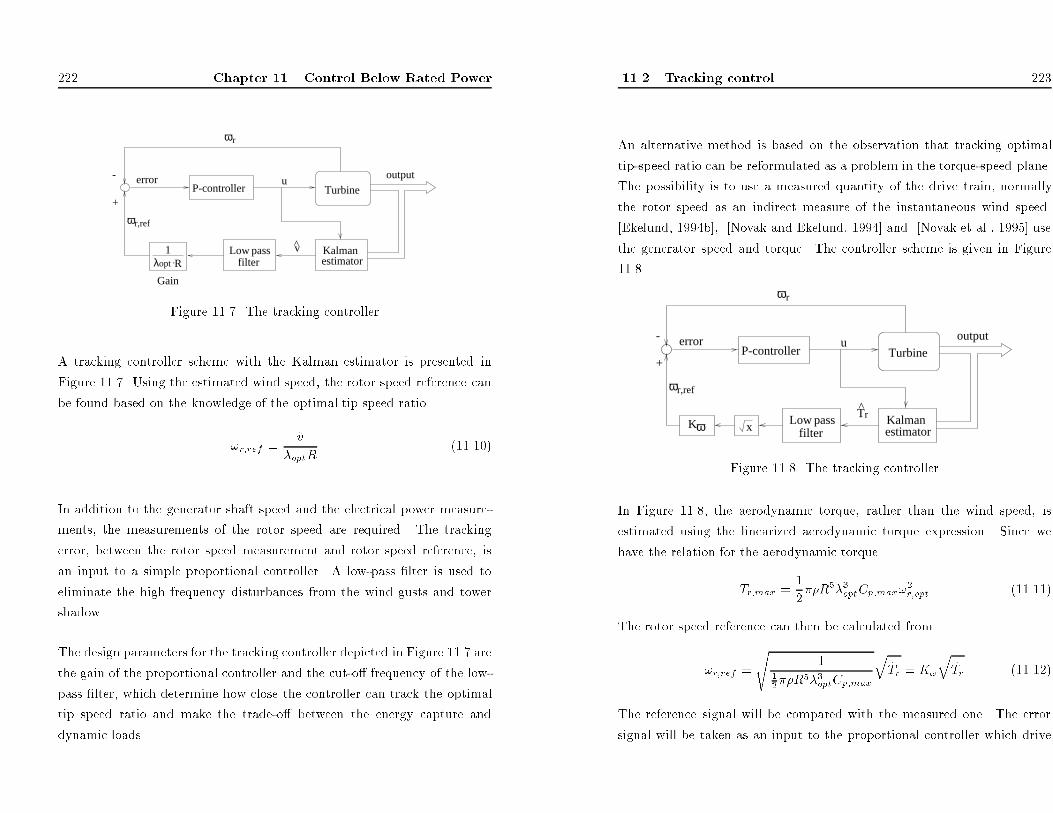
222 Chapter 11. Control Below Rated Power
estimatorKalman Low pass
filterλopt R.1
ωr,ref
P-controller
ωr
v
-
^
Turbine
Gain
error outputu
+
Figure 11.7. The tracking controller
A tracking controller scheme with the Kalman estimator is presented in
Figure 11.7. Using the estimated wind speed, the rotor speed reference can
be found based on the knowledge of the optimal tip speed ratio
!r;ref =
^v�optR
(11.10)
In addition to the generator shaft speed and the electrical power measure-
ments, the measurements of the rotor speed are required. The tracking
error, between the rotor speed measurement and rotor speed reference, is
an input to a simple proportional controller. A low-pass �lter is used to
eliminate the high frequency disturbances from the wind gusts and tower
shadow.
The design parameters for the tracking controller depicted in Figure 11.7 are
the gain of the proportional controller and the cut-o� frequency of the low-
pass �lter, which determine how close the controller can track the optimal
tip speed ratio and make the trade-o� between the energy capture and
dynamic loads.
11.2 Tracking control 223
An alternative method is based on the observation that tracking optimal
tip-speed ratio can be reformulated as a problem in the torque-speed plane.
The possibility is to use a measured quantity of the drive train, normally
the rotor speed as an indirect measure of the instantaneous wind speed.
[Ekelund, 1994b], [Novak and Ekelund, 1994] and [Novak et al., 1995] use
the generator speed and torque. The controller scheme is given in Figure
11.8.
ωK
r,ref
Turbineerror outputu
ωr
-
+
estimatorKalman Low pass
filterxT̂r
P-controller
ω
Figure 11.8. The tracking controller
In Figure 11.8, the aerodynamic torque, rather than the wind speed, is
estimated using the linearized aerodynamic torque expression. Since we
have the relation for the aerodynamic torque
Tr;max =1
2��R5�3optCp;max!
2r;opt (11.11)
The rotor speed reference can then be calculated from
!r;ref =s
1
12��R
5�3optCp;maxq^Tr = K!
q^Tr (11.12)
The reference signal will be compared with the measured one. The error
signal will be taken as an input to the proportional controller which drive
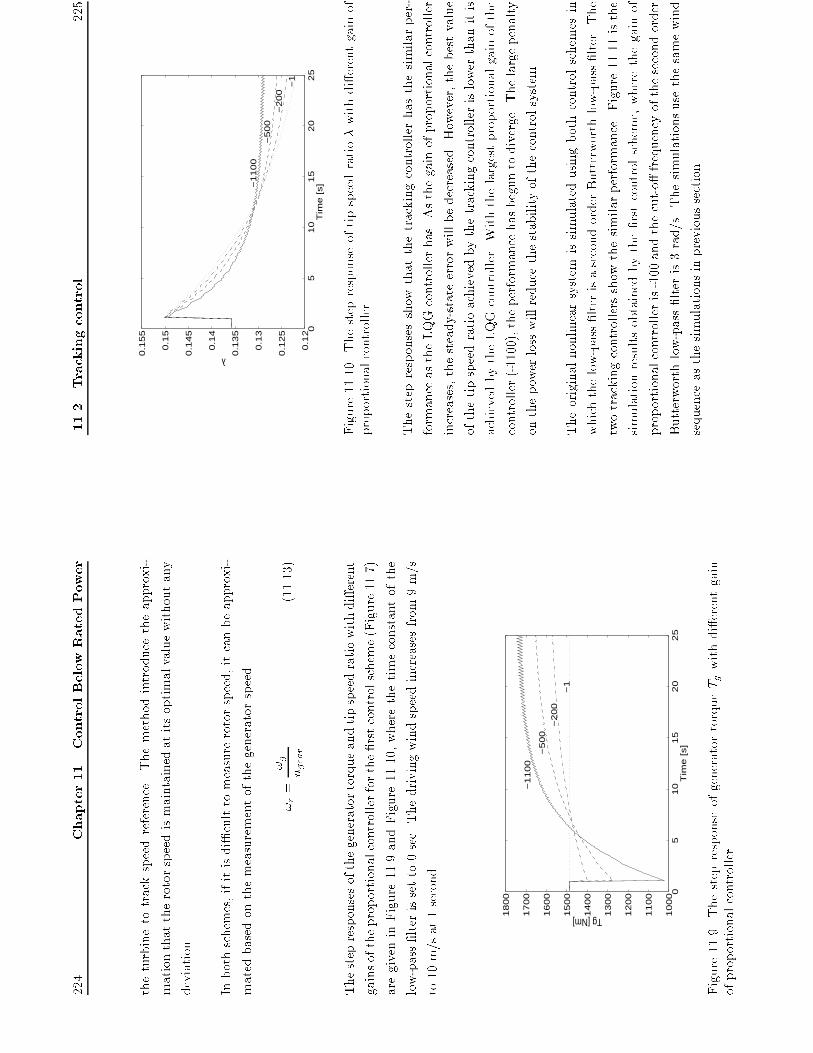
224
Chapter11.ControlBelowRatedPower
theturbinetotrackspeedreference.Themethodintroducetheapproxi-
mationthattherotorspeedismaintainedatitsoptimalvaluewithoutany
deviation.
Inbothschemes,ifitisdi�culttomeasurerotorspeed,itcanbeapproxi-
matedbasedonthemeasurementofthegeneratorspeed
!r=
!g
ngear
(11.13)
Thestepresponsesofthegeneratortorqueandtipspeedratiowithdi�erent
gainsoftheproportionalcontrollerforthe�rstcontrolscheme(Figure11.7)
aregiveninFigure11.9andFigure11.10,wherethetimeconstantofthe
low-pass�lterissetto0sec.Thedrivingwindspeedincreasesfrom9m/s
to10m/sat1second.
05
10
15
20
25
10
00
11
00
12
00
13
00
14
00
15
00
16
00
17
00
18
00
Tim
e [
s]
Tg [Nm]
−1
10
0
−5
00
−2
00
−1
Figure11.9.ThestepresponseofgeneratortorqueTgwithdi�erentgain
ofproportionalcontroller.
11.2
Trackingcontrol
225
05
10
15
20
25
0.1
2
0.1
25
0.1
3
0.1
35
0.1
4
0.1
45
0.1
5
0.1
55
Tim
e [
s]
λ
−1
10
0
−5
00
−2
00
−1
Figure11.10.Thestepresponseoftipspeedratio�withdi�erentgainof
proportionalcontroller.
Thestepresponsesshowthatthetrackingcontrollerhasthesimilarper-
formanceastheLQGcontrollerhas.Asthegainofproportionalcontroller
increases,thesteady-stateerrorwillbedecreased.However,thebestvalue
ofthetipspeedratioachievedbythetrackingcontrollerislowerthanitis
achievedbytheLQGcontroller.Withthelargestproportionalgainofthe
controller(-1100),theperformancehasbeguntodiverge.Thelargepenalty
onthepowerlosswillreducethestabilityofthecontrolsystem.
Theoriginalnonlinearsystem
issimulatedusingbothcontrolschemesin
whichthelow-pass�lterisasecondorderButterworthlow-pass�lter.The
twotrackingcontrollersshowthesimilarperformance.Figure11.11isthe
simulationresultsobtainedbythe�rstcontrolscheme,wherethegainof
proportionalcontrolleris-100andthecut-o�frequencyofthesecondorder
Butterworthlow-pass�lteris3rad/s.Thesimulationsusethesamewind
sequenceasthesimulationsinprevioussection.

226
Chapter11.ControlBelowRatedPower
50
10
01
50
55
60
65
70
75
80
85
Tim
e [
s]
Pe [KW]
50
10
01
50
0.4
2
0.4
25
0.4
3
0.4
35
0.4
4
0.4
45
Tim
e [
s]
Cp []
50
10
01
50
70
75
80
85
90
95
10
0
Tim
e [
s]
wg [rad/s]
50
10
01
50
84
0
86
0
88
0
90
0
92
0
94
0
Tim
e [
s]
Tg [Nm]
Figure11.11.Simulationwiththetrackingcontrollerinpartialload.
mean(Tg)[Nm]
mean(!g)[rad/s]
mean(Pe)[KW]
6m/s
672.20
80.57
50.58
7m/s
913.60
94.09
80.30
SD(Tg)[Nm]
SD(!g)[rad/s]
mean(Pr)[KW]
6m/s
23.61
7.75
59.03
7m/s
29.47
10.07
93.26
mean(Cp)
max(ht!t)[cm]
max(ht�t)[cm]
6m/s
0.4383
0.27
1.74
7m/s
0.4376
0.42
2.43
Table11.3.Statisticsobtainedfromsimulationofthewindturbinewith
thetrackingcontrollerinpartialload.Meanwindspeedis7m/s.
TheoutputpowerPe,generatorspeed!g,generatorreactiontorqueTgand
CpvalueobtainedfromthesimulationaregiveninFigure11.11.Somekey
parametersfromthesimulationaregiveninTable11.3whichshowsthatthe
trackingcontrollerhasthesimilarperformanceastheLQGcontroller.The
capturedpowerbyvariablespeedoperationisincreased2.3%ataverage
11.3
Implementationofcontrolsystem
227
windspeedof7m/sand13.8%ataveragewindspeedof6m/s,whichis
littlelessthanitisachievedbytheLQGcontrollerwithsimilarcontrol
action.However,thetrackingcontrollerseemsmoree�ectiveto�lterout
thefastvariationsinthegeneratortorquereferencebythelow-pass�lter
inthecontrolscheme,whichconsequentlyreducesthetransientloads.
11.3
Implementationofcontrolsystem
Sincethewindfrequentlyvariesfrom
belowtoaboveratedwindspeed
andviceversa,afundamentalrequirementforthewindturbineisasmooth
changesbetweenthetwocontrolschemes.Thisisthemostimportantimple-
mentationissueencounteredwhendevelopingcontrollersforwindturbines.
Forapitchregulatedconstantspeedwindturbine,belowacertainrated
windspeed,thegeneratedpowerislessthantheturbineratingandno
controlactionisrequired.Whenthewindspeedrisesaboverated,the
poweroutputisregulatedattheratedpowervaluebyadjustingthepitch
angleoftherotorblades.Henceitisnecessarytostartupandshutdown
thecontrollerautomaticallyasthewindspeed uctuates.Consequently,
thedesignofswitchingfrombelowratedtoaboveorviceversashouldbe
treatedwithsomecaretoavoidprolongtransientandtominimizetheloads
onthewindturbine.
Thetransientsassociatedwiththewindturbinecontrollerstart-upmaybe
attributedtosomeformofwindupwithinthecontrollerwhenoperatingbe-
lowrated.Thereforestart-upstrategyforreducingtheswitchingtransient
isconsideredwithinanti-windupcontext.

228
Chapter11.ControlBelowRatedPower
Whenthewindspeedfallsbelowrated,theactuatorwillbesaturated,the
controlfeedbackloopwillbebrokenandplantwillnolongerrespondto
thecontroller.However,thepureintegratorinthecontroller,introducedto
inducethecorrectsteadystateerrorbehaviour,continuestobedrivenby
thecontrolerroranditsoutputincreasesinmagnitudeorwindup.Conse-
quently,whenthecontrollerreturnstounsaturatedoperation,thetransient
willbeincreasedwhichcanleadtoalossofperformanceandinstability.
Acommonswitchingapproachtothecontrollerissimplytofreezecontroller
integralactionwhenbelowratedoperationisdetected,i.e.,whenthepitch
angledemandfallsbelowaspeci�edthresholdvalue,theaccumulationsum
intheintegralcalculationissuspended.Thisapproachisimplementedin
thisprojectandpreventsthepureintegratorinthecontrollerfromadopting
aninappropriatestateduringbelow-ratedoperation.However,ithasbeen
indicatedby
[LeithandLeithead,1997]thattheapproachisnotalways
e�ectiveinpreventinglargestart-uptransientsandthepoorperformance
willoccurwhenthereislow-frequencydynamicsinthecontroller.
[Leitheadetal.,1992]proposesanalternativestart-uptechniquewhereby
aminorfeedbackloopisintroducedwithinthecontrollerwhichswitchesin
topermitthecontrollertocontinueoperatingbelow-ratedwindspeed.The
minorfeedbackloopmimicstheactionofthephysicalwindturbinethrough
theinclusionofatransferfunctionwhichmodelsitsdynamics.
Thedynamicsofthewindturbinedrivetrainintroducealagbetween
changesinthewindspeedandcorrespondingchangesinpoweroutput,
i.e.,whenthewindspeedrisesaboverated,thereisalagbeforepower
outputrespondsandcontrolactionisresumed.[LeithandLeithead,1997]
11.3
Implementationofcontrolsystem
229
indicatesthattheswitchingperformancemightbeimprovedbyanticipat-
ingthetransientfrom
below-ratedtoaboveratedpowergenerationand
therebycompensatingforthedynamicsofthedrivetrain.Itwassuggested
toachievethepredictiveactionbyincludinga�lterwithsuitablephaselead
combinedwiththeminorfeedbackloop.
Forapitchregulatedvariablespeedwindturbine,switchingfrom
speed
controlviareferencetorqueinbelowratedwindspeedtospeedcontrolvia
pitchdemandandgeneratortorquecontrolviareferencetorqueinabove
windspeed,resultsincontrolerrorshavingdiscontinuous.Thevarious
controllertermsmustbeimplementedinsuchawaythatthesediscontinuous
donota�ecttheperformanceofthesystem.
[LeitheadandConnor,1994]givesaswitchingapproachtothecontroller
foravariablespeedpitchregulatedwindturbinebasedontheminorfeed-
backloop.Belowratedwindspeed,thegeneratortorquereferenceactson
theerrorinrotorspeedviathecontroller.Theminorfeedbackisoperational
andpitchdemandissettoaprede�nedoptimalvalue.Aboveratedwind
speed,theminoroffeedbackisinoperative,bothpitchangleandtorque
referenceactontheerrorinpowerviathecontroller.Switchingbetween
belowandaboveratedwindspeedisactivatedbypitchdemandchanging
sign.
Thetopicofswitchingbetweendi�erentcontrolschemesisnotdiscussedin
thisthesis.
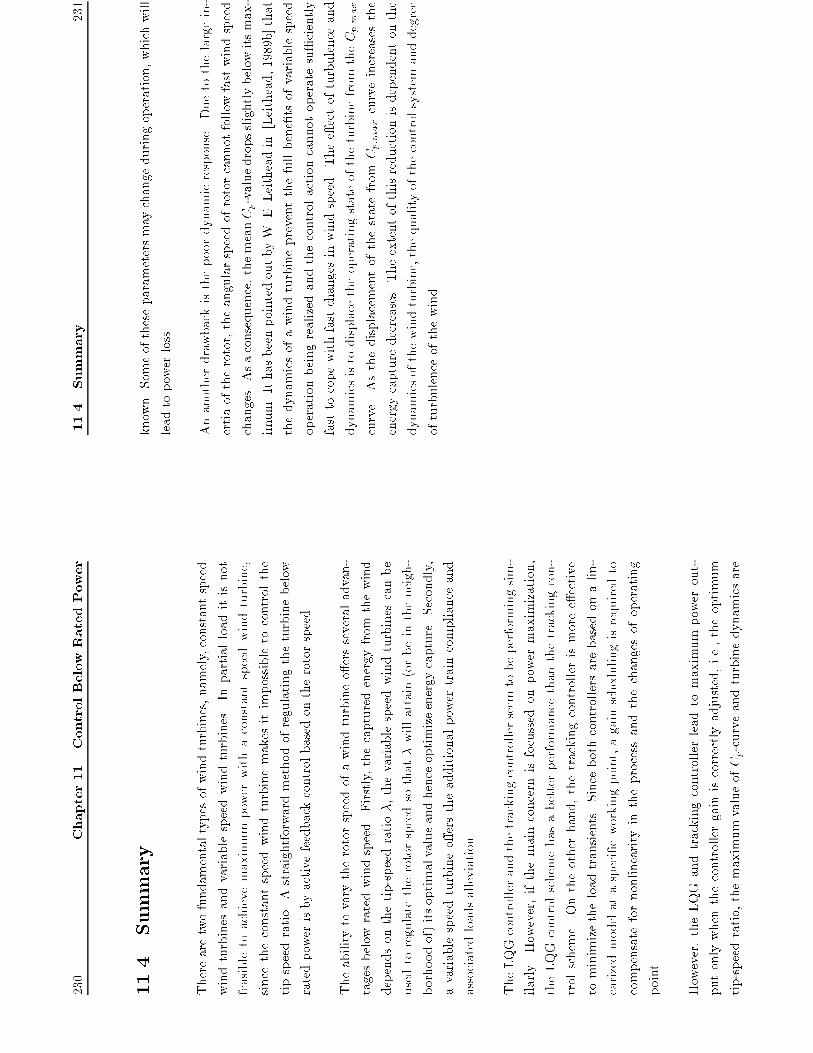
230
Chapter11.ControlBelowRatedPower
11.4
Summary
Therearetwofundamentaltypesofwindturbines,namely,constantspeed
windturbinesandvariablespeedwindturbines.Inpartialloaditisnot
feasibletoachievemaximumpowerwithaconstantspeedwindturbine,
sincetheconstantspeedwindturbinemakesitimpossibletocontrolthe
tipspeedratio.Astraightforwardmethodofregulatingtheturbinebelow
ratedpowerisbyactivefeedbackcontrolbasedontherotorspeed.
Theabilitytovarytherotorspeedofawindturbineo�ersseveraladvan-
tagesbelowratedwindspeed.Firstly,thecapturedenergyfromthewind
dependsonthetip-speedratio�,thevariablespeedwindturbinescanbe
usedtoregulatetherotorspeedsothat�willattain(orbeintheneigh-
borhoodof)itsoptimalvalueandhenceoptimizeenergycapture.Secondly,
avariablespeedturbineo�erstheadditionalpowertraincomplianceand
associatedloadsalleviation.
TheLQGcontrollerandthetrackingcontrollerseemtobeperformingsim-
ilarly.However,ifthemainconcernisfocussedonpowermaximization,
theLQGcontrolschemehasabetterperformancethanthetrackingcon-
trolscheme.Ontheotherhand,thetrackingcontrollerismoree�ective
tominimizetheloadtransients.Sincebothcontrollersarebasedonalin-
earizedmodelataspeci�cworkingpoint,againschedulingisrequiredto
compensatefornonlinearityintheprocessandthechangesofoperating
point.
However,theLQGandtrackingcontrollerleadtomaximumpowerout-
putonlywhenthecontrollergainiscorrectlyadjusted,i.e.,theoptimum
tip-speedratio,themaximumvalueofCp-curveandturbinedynamicsare
11.4
Summary
231
known.Someoftheseparametersmaychangeduringoperation,whichwill
leadtopowerloss.
Ananotherdrawbackisthepoordynamicresponse.Duetothelargein-
ertiaoftherotor,theangularspeedofrotorcannotfollowfastwindspeed
changes.Asaconsequence,themeanCp-valuedropsslightlybelowitsmax-
imum.IthasbeenpointedoutbyW.E.Leitheadin[Leithead,1989b]that
thedynamicsofawindturbinepreventthefullbene�tsofvariablespeed
operationbeingrealizedandthecontrolactioncannotoperatesu�ciently
fasttocopewithfastchangesinwindspeed.Thee�ectofturbulenceand
dynamicsistodisplacetheoperatingstateoftheturbinefromtheCp;max
curve.Asthedisplacementofthestatefrom
Cp:max
curveincreasesthe
energycapturedecreases.Theextentofthisreductionisdependentonthe
dynamicsofthewindturbine,thequalityofthecontrolsystemanddegree
ofturbulenceofthewind.
232
Chapter11.ControlBelowRatedPower
Chapter12
SummaryandConclusions
Theaimofthisprojectistoinvestigatethee�ectsofdi�erentcontrolsys-
temsforawindturbine.Theinvestigationsaredividedintobelowrated
operationandaboveratedoperation.Itisclearthatthewindturbinedy-
namicsandcontrolobjectiveschangelargelybetweendi�erentmodesof
operation.
AnonlinearwindturbinemodelbasedupontheexistingWD34windturbine
isdeveloped�rst.Allsigni�cantdynamicfeaturesencounteredonapracti-
calwindturbinehavebeenincludedinthemodelwithemphasisontheuse
ofsuchamodelintheevaluationandinvestigationofcontrolsystems.The
modelhasbeenvalidatedbyexperimentaldataobtainedfromtheWD34
windturbine.Thevalidationresultsshowagoodagreementbetweenex-
perimentaldataandsimulationoutput.Thenonlinearwindturbinemodel
isusedforsimulationpurpose.
233

234
Chapter12.SummaryandConclusions
Linearwindturbinemodelsarederivedfordesignofcontrolsystems.rated
operation,theactivepitchcontrolisimplementedforaconstantspeedwind
turbinetolimitthepowerandminimizetheloadtransients.However,a
pitchregulatevariablespeedwindturbinehastwocontrolvariables,namely
pitchangleandgeneratortorquereference,resultingamultivariablecontrol
problem.Thepitchdemandsvariedtoregulatethegeneratorspeedand
thereferencetorqueisvariedtoregulatethedrivetraintorques.Forbelow
ratedoperation,controlwithoutpitchactionthroughthegeneratorreaction
torqueisimplemented.Theturbineinthiscaseisasingleinputsingle
outputsystem.Inbothoperationmodesthedesignmodelsarelinearized
ataspeci�coperatingpoint.Thenonlinearityintheturbineleadstothat
themodelsdependontheoperatingpointsigni�cantly.
Theestimationofthewindspeedisdiscussedbeforetheinvestigationof
thecontrolsystems,sincesomecontrolmethodsmayneedtheknowledge
ofthewindspeed.Threedi�erentestimationmethodshavebeendeveloped
toestimatethewindspeed.Theinvestigationshowsthattheestimation
ofwindspeedisausefulmethodforcontroldesign.Caremustbetaken
whenimplementingtheestimationapproachessincethewindspeedcannot
beuniquelydeterminedinsomeoperatingarea.
Inpartialload,theaimofcontrolistoextractmaximumenergyfromwind
andmeanwhilereducethetransientloads.Sincetheenergyiscapturedby
theturbine,itisnaturaltooptimizetheperformancecriterionwithregard
totheaerodynamicpower.InordertoachievethemaximumCp,thetip
speedratioshouldbekeptatitsoptimalvalue.Thereforetheturbinespeed
mustfollowthechangesinwindspeed,whichrequireslargevariationsin
thecontrolsignalandconsequentlyincreasesthetransientloads.
235
Ifthemainconcernistominimizeshafttorquevariations,aturbinewith
alargeinertiaisprefered,sincetheaerodynamictorquevariationhasless
in uenceontheturbinespeedinthiscase.Ontheotherhanditisbetter
withsmallinertiawhenhighpowerproductionisprefered,becauseitde-
mandslesse�ecttochangetheturbinespeedinordertokeepthetipspeed
ratioconstant.
Infullload,thePIpitchcontrol,aswellastheLQGpitchcontrolandLQG
variablespeedpitchcontrolareinvestigated.Thesimulationresultsshow
thatthevariablespeedpitchcontrolprovidesthebestperformance.
Variablespeedoperationofhorizontalaxiswindturbineshasseveralpoten-
tialadvantages,ofwhichtwofrequentlymentionedonesaretheadditional
energycapturebelowratedwindspeedandtheadditionalpowertrain
complianceandassociatedloadalleviationaboveratedwindspeed.The
abilitytooperateatvaryingrotorspeede�ectivelyaddscompliancetothe
powertraindynamicsofthewindturbine.Anotherreasonforusingvari-
ablespeedoperationisthattherotorspeedcanbeadjustedtoreduce
noiselevelsandmakethewindturbinemoreenvironmentallyagreeable
[LeitheadandConnor,1994].
Thesebene�tsofusingvariablespeedturbinemustbeassessedagainstthe
disadvantages:thepowergenerationsystemismoreexpensiveduetothe
introductionofcomplexpowerconversionequipment.Anotherdisadvan-
tageisthatthee�ciencyandreliabilityofthevariablespeedturbineand
associatedcontrolsystemarereduced.
Theperformanceofvariablespeedwindturbinesisstronglydependenton
thethequalityofthecontrolsystemthroughitsabilitytoshapethedynamic

236
Chapter12.SummaryandConclusions
responseoftheturbinetowindspeedturbulence.Ithasbeenindicated
by[Leithead,1989b]thattheperformanceofvariablespeedwindturbine
istoanextentreducedbytheinteractionofthewindspeedturbulence
withthesystemdynamics.Belowratedwindspeedtheadditionalenergy
captureisinevitablyreducedfromthatwhichmightbeexpectedfromfully
exploitingthevariablespeedcapability.Aboveratedwindspeed,when
theregulationisgeneratorreactiontorquealone,theloadalleviationwhich
mightbeexpectedisagainreduced.Whenregulationisbypitchactionin
additiontogeneratortorque,improvedperformancecanbeexpected.
Themostimportantimplementationissueencounteredfordevelopingwind
turbinecontrollersissmoothchangebetweenthetwooperationmodes.The
mostsimpleswitchingapproachistofreezetheintegralactioninthecon-
trollerwhenbelowratedoperationisdetected.
Bibliography
[Andersenetal.,1980]Andersen,P.S.,Krabbe,U.,Lundsager,P.,and
Petersen,H.(1980).Basismaterialeforberegningafpropelvinm�lle.Tech-
nicalreport,Ris�NationalLaboratory.Ris�-M-2153.
[Bitmeadetal.,1990]Bitmead,R.R.,Gevers,M.,andWerts,V.(1990).
AdaptiveOptimalControl.Prentice-Hall.
[Bl�abjegandPetersen,1994]Bl�abjeg,F.and
Petersen,J.K.(1994).
Asynkronmotorenogdensstyringer.Teknisknytspecial1994.
[Bongersetal.,1990]Bongers,P.M.M.,Bierbooms,W.,Dijkstra,S.,and
vanHolten,T.(1990).Anintegrateddynamicmodelofa exiblewind
turbine.Technicalreport,DelftUniversityofTechnology,Holland.
[ConnorandLeithead,1994]Connor,B.andLeithead,W.E.(1994).Con-
trolstrategiesforvariablespeedstallregulatedwindturbines.In5th
EuropeanWindEnergyAssociationConferenceandExhibition,Greece.
[DennisandSchnabel,1983]Dennis,J.E.andSchnabel,R.B.(1983).
NumericalMethodsforUnconstrainedOptimizationandNonlinearEqua-
tions.Prentice-Hall,Inc.
237
238
BIBLIOGRAPHY
[Ekelund,1994a]Ekelund,T.(1994a).Controlofvariablespeedwindtur-
binesinabroadrangeofwindspeeds.Master'sthesis,ControlEngineer-
ingLaboratory,ChalmersUniversityofTechnology,G�oteborg,Sweden.
[Ekelund,1994b]Ekelund,T.(1994b).Speedcontrolofwindturbinesin
thestallregion.InTheProceedingsofthethirdIEEEConferenceon
ControlApplications,volumeVol.1,pagespp227{232,Glasgow.
[Ekelund,1997]Ekelund,T.(1997).ModelingandLinearQuadraticOpti-
malControlofWindTurbines.PhDthesis,ControlEngineeringLabora-
tory,ChalmersUniversityofTechnology,G�oteborg,Sweden.
[ErnstandLeonhard,1988]Ernst,J.andLeonhard,W.(1988).Optimiza-
tionoftheenergyoutputofvariablespeedwindturbine.InWindPower
85'SanFraniscoProceeding,volumeVol.1,pagesp.183{188.
[FlensborgandS�rensen,1995]Flensborg,J.andS�rensen,J.B.(1995).
Combinedvariablespeedandpitchcontrolforwindturbines.Master's
thesis,InstituteofElectronicSystem,AalborgUniversity.
[Franklinetal.,1990]Franklin,G.F.,Powell,J.D.,andPowell,M.L.
(1990).DigitalControlofDynamicSystems.Addison-WesleyPublishing
Company.
[Freris,1990]Freris,L.L.(1990).WindEnergyConversionSystems.Pren-
ticeHallInternational(UK)Ltd.
[Gelb,1974]Gelb,A.(1974).AppliedOptimalEstimation.Massachusetts
InstituteofTechnology.
[H�jstrup,1982]H�jstrup,J.(1982).Velocityspectraintheunstableplan-
etaryboundarylayer.JournaloftheAtmosphericSciences,Vol.39(No.
10).
BIBLIOGRAPHY
239
[Knudsen,1983]Knudsen,T.(1983).Reguleringafvindm�ller.Master's
thesis,IMSOR,DTH.Eksamensprojektnr.13/83.
[Knudsen,1989]Knudsen,T.(1989).Start/StopStrategierforVind-Diesel
Systemer.PhDthesis,IMSOR,DTH.Licentiatafhandlingnr.53.
[KostenkoandPiotrovsky,1969]Kostenko,M.andPiotrovsky,L.(1969).
ElectricalMachines,AlternatingCurrentMachines,volume2.MIRPub-
lishers,Moscow.
[KwakernaakandSiven,1972]Kwakernaak,H.andSiven,R.(1972).Lin-
earOptimalControlSystem.Wiley-interscience,JohnWiley&Sons,Inc.,
USA.
[Larsenetal.,1992]Larsen,S.E.,Courtney,M.,Hansen,F.A.,H�jstrup,
J.,andJensen,N.O.(1992).Turbulenceintensityandpowerspectra
70mabovethewatersurfaceofthegreatbelt.Technicalreport,Ris�
NationalLaboratory.Ris�-M-2898(EN).
[LeithandLeithead,1997]Leith,D.J.andLeithead,W.E.(1997).Im-
plementationofwindturbinecontrollers.Int.J.Control,Vol.66(No.
3).
[Leithead,1989a]Leithead,W.E.(1989a).Controlsystemsforwindtur-
bines.WindEngineering,Vol.13(No.6).
[Leithead,1989b]Leithead,W.E.(1989b).Variablespeedoperation-does
ithaveanyadvantages?WindEngineering,Vol.13(No.6).
[LeitheadandConnor,1994]Leithead,W.E.andConnor,B.(1994).Con-
trolofavariablespeedwindturbinewithinductiongenerator.InInter-
nationalConferenceonControl94,ConferencepublicationNo.389,IEE
1994.

240
BIBLIOGRAPHY
[Leitheadetal.,1990]Leithead,W.E.,Salle,S.A.D.L.,andReardon,
D.(1990).Windturbinecontrolobjectivesanddesign.InEuropean
CommunityWindEnergyConference,Madrid,Spain.
[Leitheadetal.,1991]Leithead,W.E.,Salle,S.A.D.L.,andReardon,D.
(1991).Poleandobjectivesofcontrolforwindturbines.IEEProceeding-
C,Vol.138(No.2).
[Leitheadetal.,1992]Leithead,W.E.,Salle,S.A.D.L.,andReardon,D.
(1992).Classicalcontrolofactiveregulationofconstantspeedhorizontal
axiswindturbines.Int.JournalofControl,Vol.55(No.4):845{876.
[NovakandEkelund,1994]Novak,P.andEkelund,T.(1994).Modeling,
identi�cationandcontrolofavariable-speedhawt.In5thEuropeanWind
EnergyAssociationConferenceandExhibition,Greece.
[Novaketal.,1995]Novak,P.,Ekelund,T.,Jovik,I.,andSchmidtbauer,
B.(1995).Modellingandcontrolofvariable-speedwindturbinedrive-
systemdynamics.IEEEControlSystems,Vol.15(no.4):p.28{38.
[�stergaard,1994]�stergaard,P.(1994).Pitchreguleringafenvindm�lle.
Master'sthesis,IMM,DTU.IMM-EKS-1994-27.
[Petersenetal.,1980]Petersen,E.L.,Troen,I.,andFrandsen,S.(1980).
Vindatlasfordanmark.Technicalreport,Ris�NationalLaboratory,Den-
mark.
[Poulsen,1985]Poulsen,N.K.(1985).RobustSelfTuningControllers.PhD
thesis,IMSOR,DTU,Denmark.
[Salleetal.,1990]Salle,S.A.D.L.,Reardon,D.,W.E.Leithead,andGrim-
ble,M.J.(1990).Reviewofwindturbinecontrol.Int.JournalofControl,
Vol.52:p.1295{111310.
BIBLIOGRAPHY
241
[Schmidtbauer,1994]Schmidtbauer,B.(1994).
Basdynamikochkom-
penseringsmetoderf�orvindturbin/generator.Technicalreport,Control
EngineeringLaboratory,G�oteborg,Sweden.ISSN0280-8927.
[Tsiolis,1994]Tsiolis,S.(1994).Asynkrongeneratorochfrekvensomriktare
f�ordriftavvindkraftverkmedvariabeltvarvtal.Technicalreport,School
ofElectricalandComputerEngineering,ChalmersUniversityofTech-
nology,G�oteborg,Sweden.
[Wilkieetal.,1990]Wilkie,J.,Leithead,W.E.,andAnderson,C.(1990).
Modellingofwindturbinesbysimplemodels.WindEngineering,Vol.
14(No.4).

242
BIBLIOGRAPHY
AppendixA
OptimizationBackground
Somebackgroundontheperformanceoptimizationwhichpreparestheway
foradaptiveextremum
controlhasbeengivenhere.Theunconstrained
optimizationproblemscanbesolvedbyagreatdealofnumericalmeth-
ods.Inthisappendixthemethodsconsideredtobeofparticularrele-
vancetotheextremumcontrolproblemswillbepresented,whichinclude
thehill-climbingmethod,gradientmethod,NewtonandGauss-Newton
method.Asacomplementofthesemethodsthelinesearchtechniqueis
introduced.Anintroductionoftheunconstrainedoptimizationhasbeen
givenby[Frandsenetal.95]and[DennisandSchnabel,1983].
243
244
AppendixA.OptimizationBackground
A.1
Searchingforanextremum
Forarealfunctionwewantto�ndanargumentvectorxthatcorresponds
toaminimalfunctionvalue:
x�=argmin xf(x)
(A.1)
f:
Rn
!R
i.e.,f(x� )�f(x).8x2Rn.Thisiscalledunconstrainedminimization
problem.Thefunctionfiscalledtheobjectivefunctionandvectorx�with
thispropertyiscalledaglobalminimumpointforf,oraglobalminimizer.
Theidealsituationforoptimizationcomputationisthattheobjectivefunc-
tionhasauniqueminimizer,i.e.,theglobalminimizer.Butinsomecases
theobjectivefunctionwillhavemorethanoneminimizer,unfortunately
itissometimeverydi�culttodevelopmethodswhichcan�ndaglobal
convergencepoint.Instead,wewill�ndavectorx� ,if�>0exists,then
kx�x� k<�)f(x� )�f(x)
(A.2)
suchavectorx�iscalledalocalminimumpointforf.Alocalminimumfor
fisanargumentvectorgivingthesmallestfunctionvalueinsideacertain
region.
A.1
Searchingforanextremum
245
ThesecondorderTaylorseriesforanobjectivefunctionf(x)inaneigh-
bourhoodaroundxis
f(x+h)=f(x)+hTf0 (x)+
1 2hTf00 (x)h+O(khk3)
(A.3)
wherethegradientisde�nedby g
(x)=f0 (x)
(A.4)
andthesecondorderderivativematrix,theso-calledHessianmatrix,is
de�nedby
H(x)=f00 (x)
(A.5)
Asu�cientconditionforx=x�beingalocalminimumoff(x)is
g(x� )=0
H(x� )>0
(A.6)
Correspondingly,iftheHessianmatrixisnegativede�nite
g(x� )=0
H(x� )<0
(A.7)
x=x�willbealocalmaximumoff(x).
Allnumericalmethodsforunconstrainedoptimizationdescribedinthisap-
pendixareiterative.Thatistosay,aninitialestimatex0ofaminimizer
x�oftheobjectivefunctionfisgiven,andasequencefxkgofestimatesof
x�isgenerated.Thissequencewill,undercertainconditionsonx0andon
f,convergetox� .Thistypeofmethodsgenerallytakestheform
xk+1=xk+�khk
(A.8)
wherexkiscurrentiteration,hkiscurrentsearchdirectionand�kisstep
size.

246 Appendix A. Optimization Background
As a ideal condition, a stopping rule for the iteration (A.8) is that the
current error is small enoughkxk � x�k < �1 (A.9)
However, it cannot be used in real application, since x� is not known. In-
stead we have to use an approximation to this condition
kxk+1 � xkk < �1 (A.10)
Another rule is the current value of f(x) is near enough to the minimal
value f(x�). Using the same approximation, we have
f(xk)� f(xk+1) < �2 (A.11)
Since g(xk)! 0, if xk converge to x� for k !1, the stopping criterion can
also be
kg(xk)k < �3 (A.12)
A.2 Hill-climbing algorithm
If we assume that a dynamic system is described by a one-dimensional
simple form
f(x(t)) = y� � a0(x(t)� x�)2 (A.13)
where f can be taken as a performance function or the system output. y�
is the maximum attainable value of f , x� is the optimal value of adjustable
input x(t) which maximizes or minimizes the nonlinear function. The rela-
tion between f and the x(t) is assumed to be quadratic, and a0 is sensitivity
A.2 Hill-climbing algorithm 247
of the quadratic curve. The parameters y�, x� and a0 which characterize
the performance function or the system dynamics are normally unknown.
The quadratic curve is illustrated in Figure A.1.
y
x* x(t)
f(x(t))
*
Figure A.1. Performance function for a single parameter extremum problem
A quadratic assumption of f is important, since it is in most cases acceptable
for extremum controllers operating close to the optimum point.
The simplest hill-climbing algorithm is to move from an initial position to
the optimum point by �xed length steps. The principle of the algorithm is
shown in Figure A.2.
x
f(x)
hh
x
3
f2
f
x x
f
1 2 3
1
Figure A.2. Hill-climbing algorithms

248
AppendixA.OptimizationBackground
wheref i=f(xi),i=1;2;3.Frompositionx(t)=x1,amovementx2=
x1+hismade,thevaluesf 1andf 2arecomparedbycalculatingperformance
function(A.13)whichisassumedknown.Iff 2islargethanf 1,x2=x1+h
istakenasthevalueofx(t+1),otherwisex2=x1�hisadopted.The
processiscontinueduntiltheextremumisreached.Thealgorithmcanbe
consideredasaspecialcaseofalgorithm(A.8),wherethestepsizeishand
thesearchdirectionis�1.
Sincetheinputsignalwillmovebackwardandforwardeithersideofthe
optimumeventually,x(t)willlieinaneighbourhoodoftheoptimalvaluex�
atlast.Ifwedecreasethesteplengthh,x(t)willbeclosertotheoptimal
value,buttheconvergencespeedwillbeslowdown.Ifweincreasethestep
lengthh,theoutputwillhaveasubstantialdistancebetweentheextremum,
althoughtheconvergencespeedisfast.
Thealgorithmcanmakestepsinthewrongdirectionbecauseofthepresence
ofthenoiseinthesystem.
A.3
Gradientmethod
Thegradientalgorithmorthesteepestdescentalgorithmallowsthehill-
climbingratetobeadjustedaccordingtothesizeofthegradient.Ateach
iterationthesearchdirectionismodi�edalongtheoppositedirectionofthe
gradient,i.e.,hk=�f0 (xk),whichiscalledthesteepestdecentdirection.
Inthiscasetheadjustmentrulefromxk+1toxkisgivenby
A.3
Gradientmethod
249
xk+1=xk��kg(xk)
(A.14)
whereg(xk)isthegradientde�nedin(A.4)and�k>0isagainparameter
whichcontrolstheconvergencerate.Thegradientmethodreliesona�rst
orderapproximationtotheobjectivefunctioninaneighbouringpointxk+1
toxk f
(xk+1)
=
f(xk)+(xk+1�xk)Tg(xk)+O(kxk+1�xkk2)
=
f(xk)��kg(xk)Tg(xk)+O(�2 k)
(A.15)
Ifthestepsize�k>0isadequatelysmall,the�rsttwotermsinthefunction
willdominateoverthelast,i.e.,thethirdtermisinsigni�cant.Itisthen
alwayspossibletoobtainareductionoftheobjectivefunction
f(xk+1)<f(xk)
Aconstantstepsizeisquiteoftenselected,whereasanumberofmethods
canbeappliedtoselectthestepsize�k,sincetheconvergenceraterelieson
it.AlinesearchmethodgiveninsectionA.6willingeneralgivethemost
rapidconvergence.
Theadvantageofthegradientalgorithmisthatthesizeoftheadjustment
ateachstepisdependentuponthesizeofthegradient.Theadjustmentstep
islargewhenthealgorithmisfarfromtheextremumandreduceswhenthe
extremumisclose.Butthealgorithmrequiresaknowledgeofthegradient
functionanditmightbesensitivetothenoise.Thegradientmethodhas
linearconvergence(convergenceoforder1),i.e.
kek+1k<c 1kekkwithc 1<1;xk
closetox�
(A.16)
250
AppendixA.OptimizationBackground
wheree k=xk�x� .Thegradientmethodismuchfasterthanthe�xed
steplengthmethods.
A.4
TheNewtonmethod
Whereasthegradientmethodreliesona�rstorderapproximationtothe
objectivefunction,thenewtonmethodisdeterminedasaminimizerofa
secondorderexpansionoftheobjectivefunctionatcurrentiterationxk
f(x)=f(xk)+(x�xk)Tf0 (xk)+
1 2(x�xk)Tf00 (xk)(x�xk)
(A.17)
Theideaisnowatiterationxktominimizetheobjectivefunctionf(x).If
theHessianH(xk)ispositivede�nite,f(x)willhaveauniqueminimizerat
apointwheref0 (x)=0,i.e.
g(xk)+H(xk)(x�xk)=0
whichleadsto
xk+1=xk�H(xk)�1g(xk)
(A.18)
Thisisalsoaspecialcaseofgeneralalgorithm(A.8),whenthestepsize
�k
=1andthesearchdirectionhk
=�H(xk)�1g(xk)whichiscalleda
Newtondirection.
AmaximumpointwillbefoundifH(xk)isnegativede�niteforallk.
IncaseH(xk)stayspositivede�niteforallkandifstartingpointissuf-
�cientclosetoaminimizer,themethodwillusuallyconvergeveryrapidly
towardstominimumpoint.Moreprecisely,theNewtonmethodconverges
A.4
TheNewtonmethod
251
quadraticallytowardx� ,i.e.,
kek+1k<c 2kekk2;xk
closetox�
(A.19)
ThedisadvantageoftheNewtonoptimizationalgorithmisthatitrequires
aknowledgeofboththegradientandsecondorderderivativeoftheper-
formancefunction.Thesemaybedi�cultto�ndeventhoughtheyare
knowntoexist.Butthemostseveredrawbackisthemethodlackofglobal
convergence.Whenxkisfarfromthesolution,f00 (xk)maynotbepositive
de�nite.Inthiscasetheiterationmayconvergetoasaddlepointoramax-
imizersincetheiterationisidenticaltotheoneusedforsolvingf0 (x)=0.
Anystationarypointoffisasolutiontothesystem.
The�rstmodi�cationistheNewtonmethodwithlinesearch,thereforethe
iterationismodi�edby x
k+1=xk��kH(xk)�1g(xk)
(A.20)
wherethestepsize�kisdeterminedbylinesearchalgorithmwhichwillbe
giveninsectionA.6.
Anotherideaistotaketheadvantageofthesafeconvergenceproperties
ofthegradientmethodwhenevertheNewtonmethodgetsintotrouble.
Thegradientmethodisselected,whenxkisfarfromtheconvergencepoint
wheretheHessianmaynotbepositivede�nite.TheNewtonmethodisse-
lected,whenxkisclosetotheconvergencepointwherethegradientmethod
252
AppendixA.OptimizationBackground
convergesslowly.Thequadraticconvergencecanbeobtainedwhenthese-
quencegetsclosetox� .
Amuchmoreappealingmodi�cationoftheoriginalNewtonmethodisoften
referredastheDampedNewtonmethodwherewecombinethegradient
methodandtheNewtonmethodinthefollowingway.Thegradientmethod
andNewtonmethodareshowntogetherhere
Gradientmethod
Newtonmethod
SolveIhk=�f0 (x)
Solvef00 (xk)hk=�f0 (xk)
xk+1=xk+�khk
xk+1=xk+�khk
whereIistheidentitymatrix.
TheideaofaDampedNewtonmethodistocombinethetwomethodsby
addingamultipleoftheidentitymatrixtof00 (xk).
DampedNewtoniteration
Solve(f00 (xk)+�I)hk=�f0 (xk),��0
Adjust�
Ifxk+hkacceptablethenxk+1=xk+hk.
A.5
Gauss-Newtonmethod
253
Itiseasilyseenthistypeofmethodisacompromisebetweenthegradient
methodandNewtonmethod.Incasef00 (xk+�I)isnotsafelypositive
de�nite,�willbeincreased.If�islarge,hk
willbeclosetothegra-
dientdirection,whereasasmall�yieldsanearlyNewtondirection.If
�isupdatedineachiteration,themethodiscalledLevenberg-Maquardt
method.Thedetailsforchoosing�isgivenby[Frandsenetal.95]and
[DennisandSchnabel,1983].
A.5
Gauss-Newtonmethod
Theso-calledGauss-Newtonmethodisaniterativemethodtominimizethe
criterion
V(x)=
m X t=1
(f(t;x))2
(A.21)
Weassumethatfcanbeapproximatedbya�rstorderTaylorseries,which
isgivenby
� f(t;x)=f(t;xk)+(x�xk)Tf0 (t;xk)
(A.22)
theapproximatedcriterionisthen
L(x)=
m X t=1
(� f(t;x))2
(A.23)
sowehaveV(x)�L(x)
ThegradientatxkintheNewtonmethodis
g(xk)=L0 (xk)=
m X t=1
2� f(t;xk)f0 (t;xk)
(A.24)

254
AppendixA.OptimizationBackground
andHessianis
R(xk)=
m X t=1
2f0 (t;xk)f0 (t;xk)
(A.25)
R(xk)iscalledtheGauss-NewtonHessiananditisobviouslypositivesemidef-
inite.TheGauss-NewtoniterationisderivedasaminimizerofL(x)
xk+1=xk��kR(xk)�
1g(xk)
(A.26)
Inpracticetheiterationshouldbecomplementedwithaline-searchfor
determiningthestepsize�k.ItisclearthattheNewtonandGauss-Newton
methodsareidentical,whenthesecondorderderivativecanbeneglected.
TheGauss-Newtonhastheattractivepropertythatitrequiresonlya�rst
orderderivative.Thelocalconvergenceofthemethodisingeneralonly
linear(�rstorder),whichistheoreticallyslowerthantheNewtonmethod.
Butexperiencesshowthatitisoftenfasterinpractice.Inparticularwhen
itisusedfarfromtheminimum.AnotherproblemintheGauss-Newton
methodisthattheR(xk)maybesingularorill-conditioning.Itcanbe
solvingbyaddingasmalldiagonalmatrixtotheHessian.
A.6
Linesearchtechnique
InsomecasesthegradientmethodorNewtonmethodwillbecomplemented
byalinesearch,becausethealgorithm
isderivedfrom
a�rstorderor
secondorderapproximationtotheobjectivefunction.Theapproximation
A.6
Linesearchtechnique
255
willusuallybevalidonlyinacertainneighborhoodaroundthecurrent
iteration.Thefullstep�k=1mightbringthenewiterationtoalocation
thatisfarfromthepointpredictedbytheapproximation.
Theideaoflinesearchmethodsis:whenagradientdirectionoraNewton
directionhasbeendetermined,wehavetodecidehowlongthestepinthis
directionshouldbe.Afrequentlyusedmethodfordeterminingstepsize�k
istoestimatealocalminimizeroff(xk+�hk)regardedasafunctionof�
f(xk+�khk)=min�>0f(xk+�hk)
(A.27)
Introducethenotation
'(�)=f(xk+�hk)
(A.28)
thenonemethodofdetermining�kistoestimatealocalminimizerof',
sothat�ksatis�es
'0 (�)=0
(A.29)
Ingeneral,(A.29)isanonlinearequationanddi�culttosolveanalyti-
cally.Thereforesomenumericalmethodsforestimatingavalueof�which
satis�es(A.27)mustbeused.Mostlinesearchesareiterativeprocedures
whichareterminatedwhenthecurrentestimateof�ksatis�esagivenset
ofconvergencecriteria.Linesearchesarethereforeusuallynotexact.
Themethodswhichareusedfrequentlyforestimating�karebaseduponthe
ideaofapproximating'de�nedby(A.28)byapolynomialin�ofdegreetwo
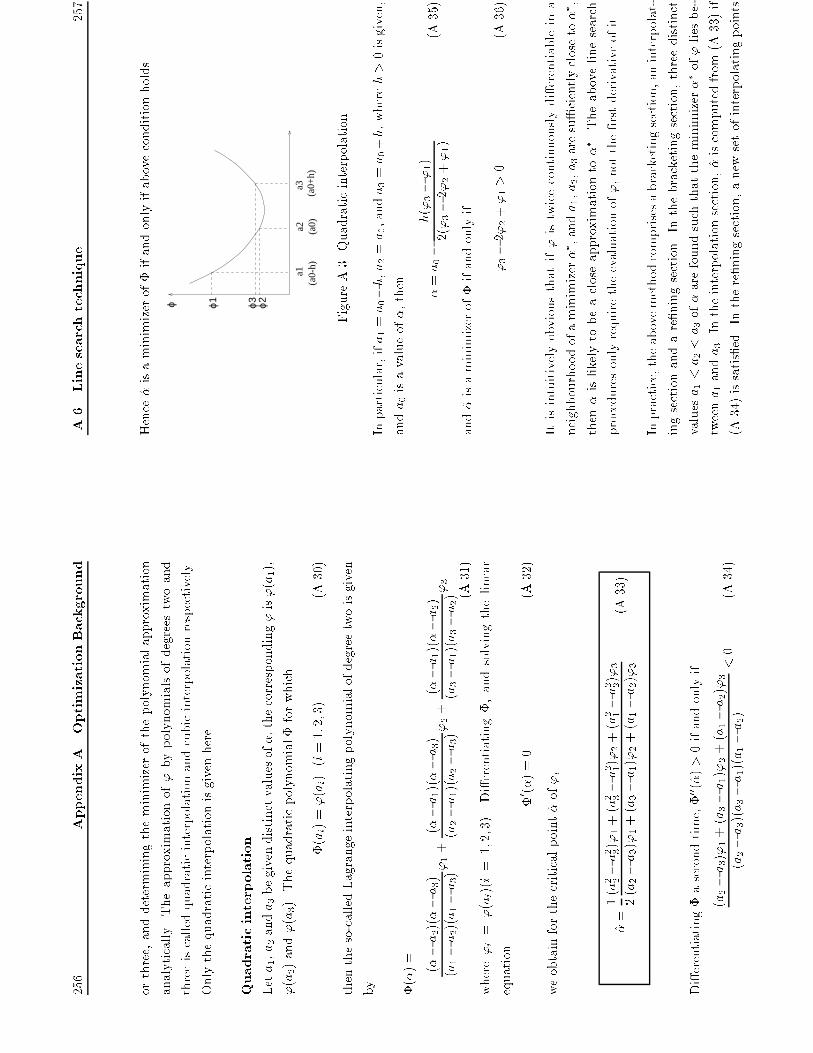
256
AppendixA.OptimizationBackground
orthree,anddeterminingtheminimizerofthepolynomialapproximation
analytically.Theapproximationof'bypolynomialsofdegreestwoand
threeiscalledquadraticinterpolationandcubicinterpolationrespectively.
Onlythequadraticinterpolationisgivenhere.
Quadraticinterpolation
Leta1,a2anda3begivendistinctvaluesof�,thecorresponding'is'(a1),
'(a2)and'(a3).Thequadraticpolynomial�forwhich
�(ai)='(ai)(i=1;2;3)
(A.30)
thentheso-calledLagrangeinterpolatingpolynomialofdegreetwoisgiven
by
�(�)=
(��a2)(��a3)
(a1�a2)(a1�a3)'
1+
(��a1)(��a3)
(a2�a1)(a2�a3)'
2+
(��a1)(��a2)
(a3�a1)(a3�a2)'
3
(A.31)
where'i=
'(ai)(i=
1;2;3).Di�erentiating�,andsolvingthelinear
equation
�0 (�)=0
(A.32)
weobtainforthecriticalpoint^�of',
^�=
1 2(a2 2�a2 3)'1+(a2 3�a2 1)'2+(a2 1�a2 2)'3
(a2�a3)'1+(a3�a1)'2+(a1�a2)'3
(A.33)
Di�erentiating�asecondtime,�00 (^�)>0ifandonlyif
(a2�a3)'1+(a3�a1)'2+(a1�a2)'3
(a2�a3)(a3�a1)(a1�a2)
<0
(A.34)
A.6
Linesearchtechnique
257
Hence^�isaminimizerof�ifandonlyifaboveconditionholds.
(a0+
h)
ϕ ϕ1
a1a2
a3
ϕ2ϕ3
(a0)
(a0-
h)FigureA.3.Quadraticinterpolation
Inparticular,ifa1=a0�h,a2=a0,anda3=a0+h,whereh>0isgiven,
anda0isavalueof�,then
^�=a0�
h('3�'1)
2('3�2'2+'1)
(A.35)
and^�isaminimizerof�ifandonlyif
'3�2'2+'1>0
(A.36)
Itisintuitivelyobviousthatif'istwicecontinuouslydi�erentiableina
neighbourhoodofaminimizer�� ,anda1,a2,a3aresu�cientlycloseto�� ,
then^�islikelytobeacloseapproximationto�� .Theabovelinesearch
proceduresonlyrequiretheevaluationof',notthe�rstderivativeofit.
Inpractice,theabovemethodcomprisesabracketingsection,aninterpolat-
ingsectionandare�ningsection.Inthebracketingsection,threedistinct
valuesa1<a2<a3of�arefoundsuchthattheminimizer��of'liesbe-
tweena1anda3.Intheinterpolationsection,^�iscomputedfrom(A.33)if
(A.34)issatis�ed.Inthere�ningsection,anewsetofinterpolatingpoints

258
AppendixA.OptimizationBackground
isselectedfroma1,a2,a3and^�,if^�isnotasu�cientlygoodestimateof
�� ,andinterpolationsectionisre-entered.Theinterpolatingandre�ning
sectionareusedrepeatedlyuntil^�isregardedasasu�cientlygoodesti-
mateof�� .Detailsofthebracketingsectionandthere�ningsectionare
givenby[Wolfe78].
A.7
Summary
Thisappendixgivesanintroductionofunconstrainedoptimizationtech-
niquesasabackgroundknowledgetotheextremumcontrolproblem.In
thechapterthehill-climbingmethod,gradientmethod,NewtonandGauss-
Newtonmethodareintroduced.ThegradientmethodorNewtontype
methodscanbeincorporatedwithlinesearch.
Thegradientmethodhasalinear�nalconvergence,whichisslowerthanthe
Newtonmethodthathasasecondorderconvergence.Thesizeofadjustment
inthegradientmethodateachiterationisdependentuponthesizeofthe
gradient.Theadjustmentislargeandthealgorithmconvergesfastwhen
xk
isfarfrom
theconvergencepoint.Theadjustmentissmallandthe
algorithmconvergesslowlywhenxkisclosetotheconvergencepoint.
TheNewtonmethodissimpleandclearandthuseasytoimplement,the
methodconvergesquadraticallyfromgoodstartingguessiff00 (x� )isposi-
tivede�nite.ButtheNewtonmethodlacksofglobalconvergenceformany
problems.Itrequiressecondorderderivativeoff,besidesf00 (xk)maynot
bepositive.TheNewtonmethodcanbemodi�edbycombiningtheline
searchwherethestepsize�kwillbedeterminedateachstep.Foraspecial
A.7
Summary
259
criterion,theGauss-NewtonmethodcanguaranteetheHessianispositive
semide�nite.
ThegradientmethodandNewtonmethodcanbecombinedandusedfor
di�erentsituations.Thegradientmethodisselected,whenxkisfarfrom
thex� .TheNewtonmethodistaken,whenxk
isclosetothex� .The
combinedalgorithmtaketheadvantageofthesafeconvergenceproperty
ofthegradientmethodandquadraticconvergencepropertyoftheNewton
method.
Byimplementingthelinesearchalgorithm,thestepsize�k
usuallypro-
ducesasatisfactorydecreaseinthevalueoffateachiterationwhena
searchdirectionisdetermined.However,thelinesearchiscomputationally
expensive.

260
AppendixA.OptimizationBackground
AppendixB
ConvergenceAnalysisfor
RecursiveAlgorithms
Inthissectionageneralapproachtotheanalysisoftheasymptoticbe-
haviourofrecursivealgorithmsisdescribed.
Ine�ect,theconvergence
analysisisreducedtostabilityanalysisofadeterministicOrdinaryDif-
ferentialEquation(ODE).Theapproachusedforanalysisisdevelopedby
Ljung,see[Ljung77]and[WellsteadandZarrop91].Herewejustgivea
briefsummarization.
Convergencepropertiescanbestatedas
1.Thesystemisstable.
2.Themodelparameterestimatesconverge.
3.Theestimatesconvergetocorrectvalues.
261
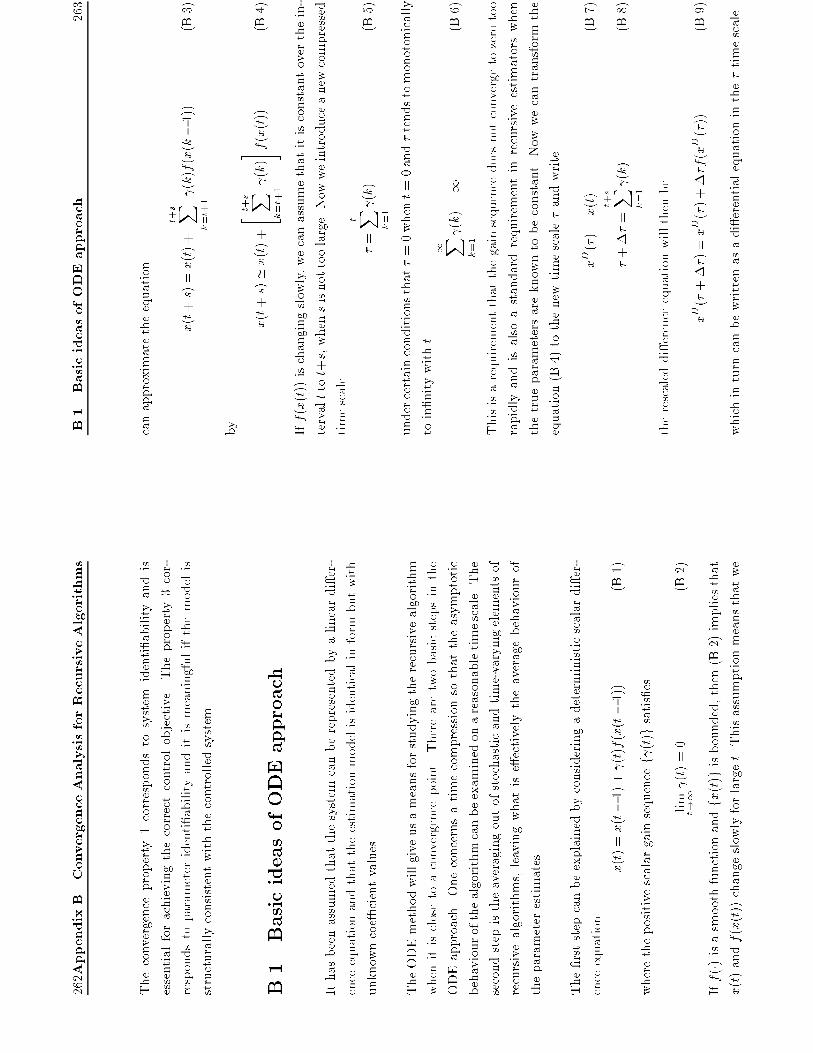
262AppendixB.ConvergenceAnalysisforRecursiveAlgorithms
Theconvergenceproperty1correspondstosystem
identi�abilityandis
essentialforachievingthecorrectcontrolobjective.Theproperty3cor-
respondstoparameteridenti�abilityanditismeaningfulifthemodelis
structurallyconsistentwiththecontrolledsystem.
B.1
BasicideasofODEapproach
Ithasbeenassumedthatthesystemcanberepresentedbyalineardi�er-
enceequationandthattheestimationmodelisidenticalinformbutwith
unknowncoe�cientvalues.
TheODEmethodwillgiveusameansforstudyingtherecursivealgorithm
whenitisclosetoaconvergencepoint.Therearetwobasicstepsinthe
ODEapproach.Oneconcernsatimecompressionsothattheasymptotic
behaviourofthealgorithmcanbeexaminedonareasonabletimescale.The
secondstepistheaveragingoutofstochasticandtime-varyingelementsof
recursivealgorithms,leavingwhatise�ectivelytheaveragebehaviourof
theparameterestimates.
The�rststepcanbeexplainedbyconsideringadeterministicscalardi�er-
enceequation
x(t)=x(t�1)+ (t)f(x(t�1))
(B.1)
wherethepositivescalargainsequencef (t)gsatis�es
limt!1 (t)=0
(B.2)
Iff(�)isasmoothfunctionandfx(t)gisbounded,then(B.2)impliesthat
x(t)andf(x(t))changeslowlyforlarget.Thisassumptionmeansthatwe
B.1
BasicideasofODEapproach
263
canapproximatetheequation
x(t+s)=x(t)+
t+s X
k=t+1
(k)f(x(k�1))
(B.3)
by
x(t+s)'x(t)+
" t+s X
k=t+1
(k)# f(x(t))
(B.4)
Iff(x(t))ischangingslowly,wecanassumethatitisconstantoverthein-
tervalttot+s,whensisnottoolarge.Nowweintroduceanewcompressed
timescale
�=
t X k=1
(k)
(B.5)
undercertainconditionsthat�=0whent=0and�tendstomonotonically
toin�nitywitht
1 X k=1
(k)=1
(B.6)
Thisisarequirementthatthegainsequencedoesnotconvergetozerotoo
rapidlyandisalsoastandardrequirementinrecursiveestimatorswhen
thetrueparametersareknowntobeconstant.Nowwecantransformthe
equation(B.4)tothenewtimescale�andwrite
xD(�)=x(t)
(B.7)
�+��=
t+s X k
=1
(k)
(B.8)
therescaleddi�erenceequationwillthenbe
xD(�+��)=xD(�)+��f(xD(�))
(B.9)
whichinturncanbewrittenasadi�erentialequationinthe�timescale

264AppendixB.ConvergenceAnalysisforRecursiveAlgorithms
d d�
xD(�)=f(xD(�))
(B.10)
inthelimitass(��)goestozero.ThisisanODE.Theasymptotic
behaviouroforiginaldi�erenceequation(B.1)isclosetothetrajectoriesof
theODE(B.10).TheODEismainlyatoolforexamininglocalconvergence.
Itispossibletogeneralizethesimplescalarrecursionbymakingthefunction
f(x(t))inequation(B.1)dependentuponafurthervariable'(t).The
equation(B.1)canbereplacedby
x(t)=x(t�1)+ (t)Q(t;x(t�1);'(t))
(B.11)
Weshallrefertox(�)astheestimatesandtheycouldbethecurrentesti-
matesofsomeunknownparametervector.Thevector'(t)isanobservation
obtainedattimet,andthesearetheobjectsthatcausex(t�1)tobeup-
datedtotakenewinformationintoaccount.Theobservationsareingeneral
functionsofthepreviousestimatesx(�)andofasequenceofrandomvectors
e(�).Thismeansthattheobservationisarandomvariable,whichmaybe
a�ectedbypreviousestimates.Thefollowingstructureforthegeneration
of'(t)willbeused
'(t)=A(x(t�1))'(t�1)+B(x(t�1))e(t)
(B.12)
Let D
s=fxjA(x)hasalleigenvaluesstrictlyinsidetheunitcircleg(B.13)
andforeachx2Ds,wede�neaasymptoticstationaryprocess
�'(t;x)=A(x)�'(t�1;x)+B(x)e(t)
�'(0;x)=0
(B.14)
B.1
BasicideasofODEapproach
265
andfurthermorewede�nethefunction
f(x)=
limt!1EQ(t;x;�'(t;x))
(B.15)
Theexpectationoperationsmoothesthein uenceofrandomcomponents
whichmaydisguisetheconvergencecharacteristicsoftherecursivealgo-
rithm.Theequation(B.11)canthenbeagainwrittenasordinarydi�eren-
tialequation(B.10).
Iff(x(t))iscontinuouslydi�erentiablewithrespecttoxinaneighborhood
ofastationarypointx�andderivativesconvergeuniformlyinthisneigh-
borhoodasttendstoin�nity.Then
f(x� )=0
(B.16)
and
H(x� )=
d dx
f(x)� � � � x=x
�
hasalleigenvaluesintheLHP
(B.17)
ThematrixH(x� )de�nesthelineardi�erentialequationobtainedfrom
(B.10)bylinearizationaroundx� .Theaboveequationsstatethatthe
algorithm(B.1)or(B.11)canconvergeonlytostablestationarypointsof
thedi�erentialequation(B.10).
Equations(B.16)and(B.17)arenecessaryconditionsforthelocalcon-
vergenceofrecursion(B.1)tox� .Theseconditionsarenotsu�cientand
thereforedonotguaranteeconvergence.Theequations(B.16)and(B.17)
arenormallyusedtocheckthepossiblelocalconvergencepoints.
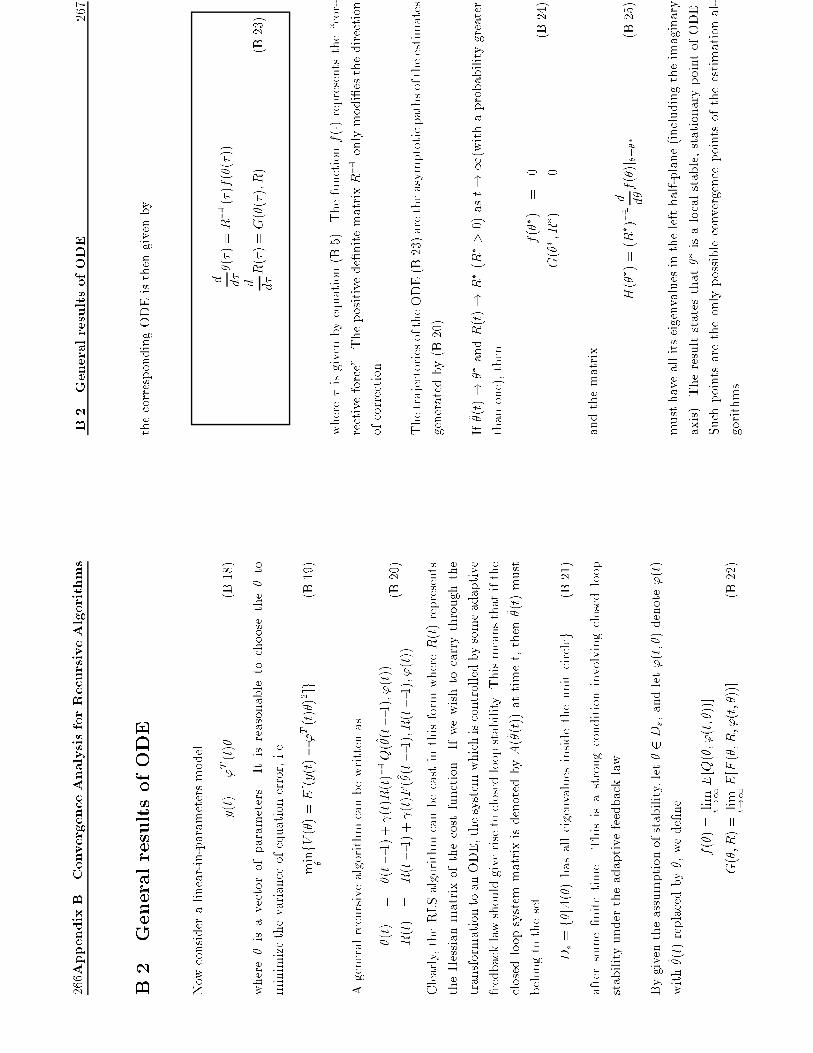
266AppendixB.ConvergenceAnalysisforRecursiveAlgorithms
B.2
GeneralresultsofODE
Nowconsideralinear-in-parametersmodel
y(t)='T(t)�
(B.18)
where�isavectorofparameters.Itisreasonabletochoosethe�to
minimizethevarianceofequationerror,i.e.
min �fV(�)=E[(y(t)�'T(t)�)2]g
(B.19)
Ageneralrecursivealgorithmcanbewrittenas
^ �(t)
=
^ �(t�1)+ (t)R(t)�1Q(^ �(t�1);'(t))
R(t)
=
R(t�1)+ (t)F(^ �(t�1);R(t�1);'(t))
(B.20)
Clearly,theRLSalgorithmcanbecastinthisformwhereR(t)represents
theHessianmatrixofthecostfunction.Ifwewishtocarrythroughthe
transformationtoanODE,thesystemwhichiscontrolledbysomeadaptive
feedbacklawshouldgiverisetoclosedloopstability.Thismeansthatifthe
closedloopsystemmatrixisdenotedbyA(^ �(t))attimet,then^ �(t)must
belongtotheset
Ds=f�jA(�)hasalleigenvaluesinsidetheunitcircleg
(B.21)
aftersome�nitetime.Thisisastrongconditioninvolvingclosedloop
stabilityundertheadaptivefeedbacklaw.
Bygiventheassumptionofstability,let�2Ds,andlet�'(t;�)denote'(t)
with^ �(t)replacedby�,wede�ne
f(�)=
limt!1E[Q(�;�'(t;�))]
G(�;R)=
limt!1E[F(�;R;�'(t;�))]
(B.22)
B.2
GeneralresultsofODE
267
thecorrespondingODEisthengivenby
d d�
�(�)=R�1(�)f(�(�))
d d�
R(�)=G(�(�);R)
(B.23)
where�isgivenbyequation(B.5).Thefunctionf(�)representsthe\cor-
rectiveforce".Thepositivede�nitematrixR�1onlymodi�esthedirection
ofcorrection.
ThetrajectoriesoftheODE(B.23)aretheasymptoticpathsoftheestimates
generatedby(B.20).
If^ �(t)!��andR(t)!R�(R�>0)ast!1(withaprobabilitygreater
thanone),then
f(�� )=
0
G(�� ;R� )=
0
(B.24)
andthematrix
H(�� )=(R� )�1d d
�f(�)j �=��
(B.25)
musthaveallitseigenvaluesinthelefthalf-plane(includingtheimaginary
axis).Theresultstatesthat��isalocalstable,stationarypointofODE.
Suchpointsaretheonlypossibleconvergencepointsoftheestimational-
gorithms.
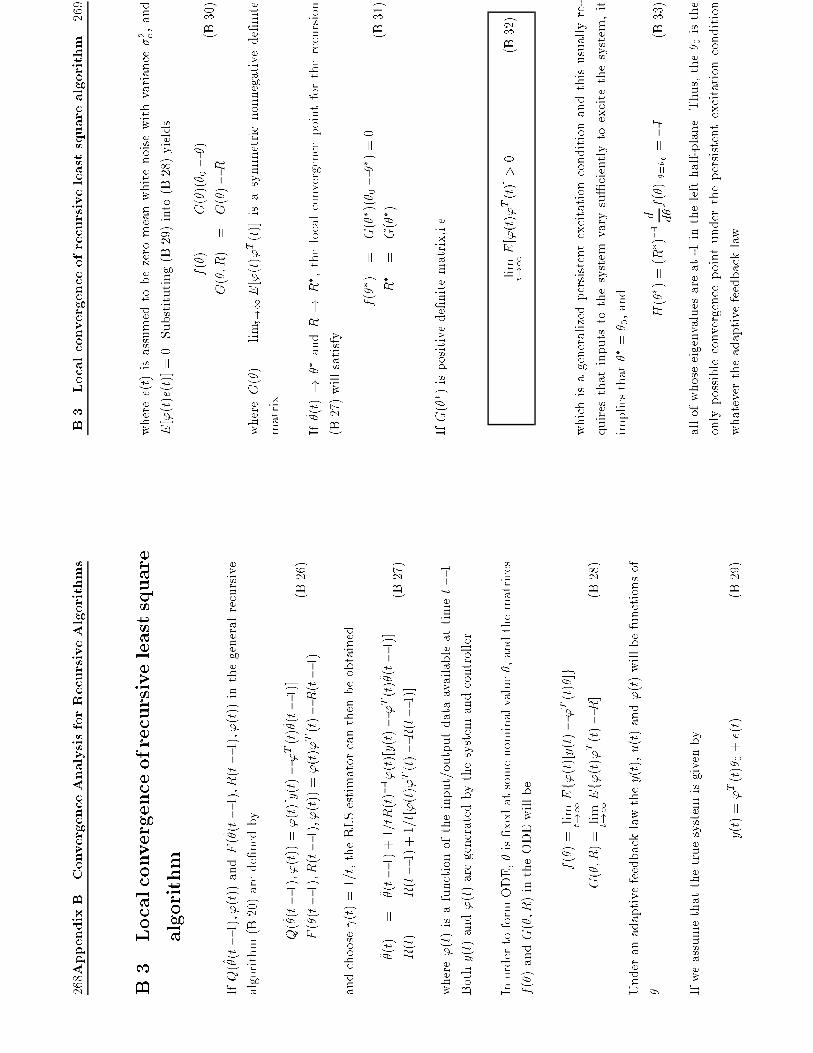
268AppendixB.ConvergenceAnalysisforRecursiveAlgorithms
B.3
Localconvergenceofrecursiveleastsquare
algorithm
IfQ(^ �(t�1);'(t))andF(^ �(t�1);R(t�1);'(t))inthegeneralrecursive
algorithm(B.20)arede�nedby
Q(^ �(t�1);'(t))='(t)[y(t)�'T(t)^ �(t�1)]
F(^ �(t�1);R(t�1);'(t))='(t)'T(t)�R(t�1)
(B.26)
andchoose (t)=1=t,theRLSestimatorcanthenbeobtained
^ �(t)
=
^ �(t�1)+1=tR(t)�1'(t)[y(t)�'T(t)^ �(t�1)]
R(t)
=
R(t�1)+1=t['(t)'T(t)�R(t�1)]
(B.27)
where'(t)isafunctionoftheinput/outputdataavailableattimet�1.
Bothy(t)and'(t)aregeneratedbythesystemandcontroller.
InordertoformODE,^ �is�xedatsomenominalvalue�,andthematrices
f(�)andG(�;R)intheODEwillbe
f(�)=
limt!1Ef'(t)[y(t)�'T(t)�]g
G(�;R)=
limt!1Ef'(t)'T(t)�R]
(B.28)
Underanadaptivefeedbacklawthey(t),u(t)and'(t)willbefunctionsof
�. Ifweassumethatthetruesystemisgivenby
y(t)='T(t)�0+e(t)
(B.29)
B.3
Localconvergenceofrecursiveleastsquarealgorithm
269
wheree(t)isassumedtobezeromeanwhitenoisewithvariance�2 e,and
E['(t)e(t)]=0.Substituting(B.29)into(B.28)yields
f(�)
=
G(�)(� 0��)
G(�;R)
=
G(�)�R
(B.30)
whereG(�)=
limt!1E['(t)'T(t)]isasymmetricnonnegativede�nite
matrix.
If^ �(t)!��andR!R� ,thelocalconvergencepointfortherecursion
(B.27)willsatisfy
f(�� )=
G(�� )(�0���)=0
R�=
G(�� )
(B.31)
IfG(�� )ispositivede�nitematrix,i.e.
limt!1E['(t)'T(t)]>0
(B.32)
whichisageneralizedpersistentexcitationconditionandthisusuallyre-
quiresthatinputstothesystem
varysu�cientlytoexcitethesystem,it
impliesthat��=� 0,and
H(�� )=(R� )�1d d
�f(�)j �=�0
=�I
(B.33)
allofwhoseeigenvaluesareat-1inthelefthalf-plane.Thus,the� 0isthe
onlypossibleconvergencepointunderthepersistentexcitationcondition
whatevertheadaptivefeedbacklaw.

270AppendixB.ConvergenceAnalysisforRecursiveAlgorithms
Systemidenti�cationisusuallythemaingoalofanadaptivecontrolalgo-
rithm,lackofsu�cientexcitationtoguaranteeanonsingularR�indicates
thatpossibleill-conditioningproblemsmayoccurintherecursion(B.27)
astimeevolves.ByreconstructingtheR(t)matrixinrecursion(B.27),a
positivede�nitematrixR(t)foralltcanbeguaranteed.
R(t)=R(t�1)+
1 t['(t)'T(t)+�I�R(t�1)]
(B.34)
where�isasmallpositivescalar.ThisisknownastheLevenberg-Marguardt
regularization.Finally,notethat(B.34)leadstothereplacementofODE
by
dR d
�=G(�)+�I�R
(B.35)
Thismeansthatiftheestimatesconverge
R�=G(�� )+�I
(B.36)
whichisinvertible.
AppendixC
TheEKFasaJointstate
andParameterEstimator
TheextendedKalman�lterisanapproximate�lterfornonlinearsystems,
basedon�rst-orderlinearization.Itsuseforjointparameterandstate
estimationproblem
forlinearsystemswithunknownparametersiswell
knownandwidelyspread.Thealgorithmandconvergenceanalysishave
beengivenbyLjungin
[Ljung79b]inasystematicandcomprehensive
way.Inthisappendixwejustgiveabriefdescriptionforunderstanding
Chapter4
271

272AppendixC.TheEKFasaJointstateandParameterEstimator
C.1
ExtendedKalman�lter
Forfurtherreference,weshallgiveabriefaccountoftheextendedKalman
�lter(EKF)algorithm.Themethodisbasedonlinearizationofthestate
equationsateachtimestepanduseoflinearestimationtheory.
Letthenonlineardiscrete-timesystembegivenby
x(t+1)
=
f(t;x(t))+w(t)
y(t)
=
h(t;x(t))+e(t)
(C.1)
wherey(t)andx(t)areoutputandstatevectors.Thesequencesfv(t)g
andfw(t)gareindependentrandomvectorswithzeromeansandvariances
Qw(t)=Efw(t)wT(t)gandQe(t)=Efe(t)eT(t)g.
TheEKFestimateofthestatex(t)isgivenby
^x(t+1)=f(t;^x(t))+K(t)[y(t)�h(t;^x(t))]
(C.2)
whereK(t)is K
(t)
=
F(t;^x(t))P(t)HT(t;^x(t))
�[H(t;^x(t))P(t)HT(t;^x(t))+Qe(t)]�1
(C.3)
P(t+1)
=
F(t;^x(t))P(t)FT(t;^x(t))+Qw(t)
�K(t)[H(t;^x(t))P(t)HT(t;^x(t))+Qe(t)]KT(t)
(C.4)
and
F(t;^x)
=
@ @xf(t;x)� � x=^x
H(t;^x)
=
@ @xh(t;x)� � x=^x
(C.5)
C.2
Thesystem
273
C.2
Thesystem
Assumethesystemis
x(t+1)
=
A0x(t)+B0u(t)+w(t)
y(t)
=
C0x(t)+e(t)
(C.6)
wherefw(t)gandfe(t)gareindependentrandomsequenceswithzeromeans
andvariances
Efw(t)wT(t)g=Qw 0
Efe(t)eT(t)g=Qe 0
(C.7)
Efw(t)eT(t)g=Qwe0
Furthermore,itisassumedthattheinitialstatex(0)isarandomvectorwith
zero-meanandcovariancematrix�0.Itisindependentoffuturevaluesof
fw(t)gandfe(t)g.AllthematricesA0,B0,C0,Qw 0,Qe 0
andQwe0
are
assumedtobetimeinvariant.
Ifthesematricesareallknown,thenthelinearleast-squaresstateestimate
forthesystemis
^x0(t+1)=A0^x0(t)+B0u(t)+K0(t)[y(t)�C0^x0(t)]
(C.8)
^x0(0)=^x0
where
K0(t)=[A0P0(t)CT 0
+Qwe0
][C0P0(t)CT 0
+Qe 0]�
1
(C.9)
P0(t+1)=A0P0(t)AT 0+Qw 0�K0(t)[C0P(t)CT 0+Qe 0]KT 0(t)(C.10)
P0(0)=�0
Let
� K0=
limt!1K0(t)
(C.11)
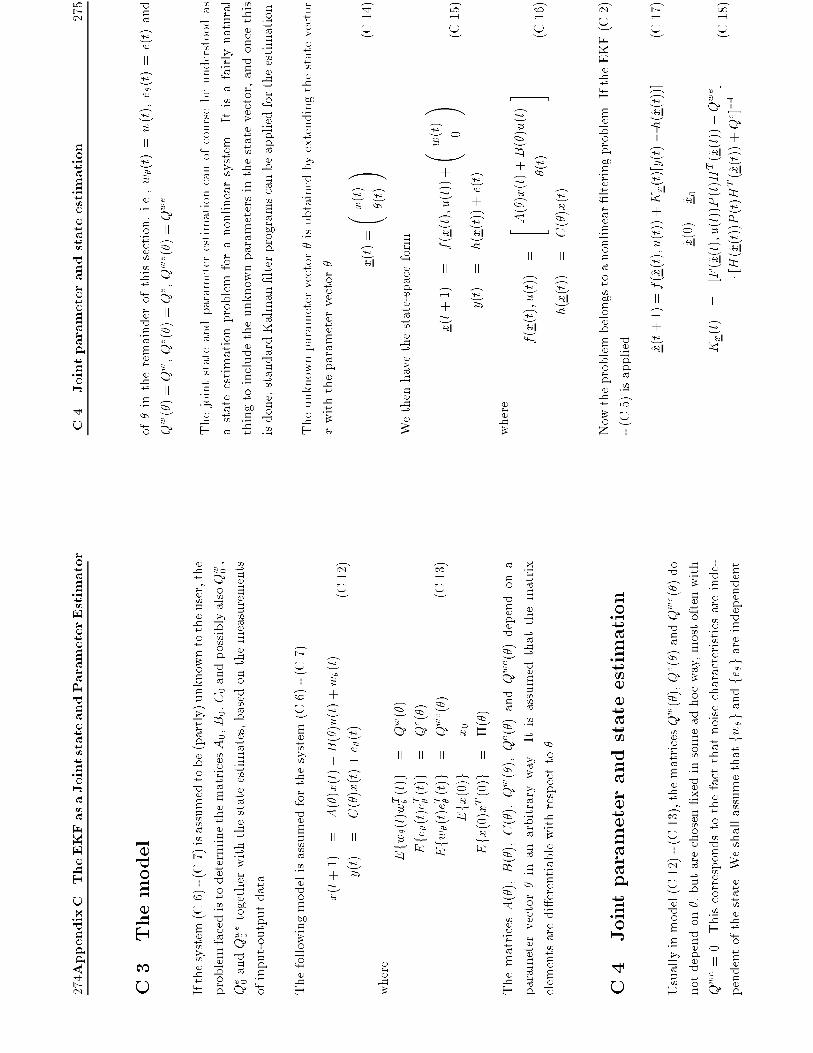
274AppendixC.TheEKFasaJointstateandParameterEstimator
C.3
Themodel
Ifthesystem(C.6)-(C.7)isassumedtobe(partly)unknowntotheuser,the
problemfacedistodeterminethematricesA0,B0,C0andpossiblyalsoQw 0,
Qe 0andQwe0
togetherwiththestateestimates,basedonthemeasurements
ofinput-outputdata.
Thefollowingmodelisassumedforthesystem(C.6)-(C.7)
x(t+1)
=
A(�)x(t)+B(�)u(t)+w�(t)
y(t)
=
C(�)x(t)+e �(t)
(C.12)
where
Efw�(t)wT �(t)g=
Qw(�)
Efe�(t)eT �(t)g=
Qe(�)
Efw�(t)eT �(t)g=
Qwe(�)
Efx(0)g=
x0
Efx(0)xT(0)g=
�(�)
(C.13)
ThematricesA(�),B(�),C(�),Qw(�),Qe(�)andQwe(�)dependona
parametervector�inanarbitraryway.Itisassumedthatthematrix
elementsaredi�erentiablewithrespectto�.
C.4
Jointparameterandstateestimation
Usuallyinmodel(C.12)-(C.13),thematricesQw(�),Qe(�)andQwe(�)do
notdependon�,butarechosen�xedinsomeadhocway,mostoftenwith
Qwe=0.Thiscorrespondstothefactthatnoisecharacteristicsareinde-
pendentofthestate.Weshallassumethatfw�gandfe�gareindependent
C.4
Jointparameterandstateestimation
275
of�intheremainderofthissection,i.e.,w�(t)=w(t),e �(t)=e(t)and
Qw(�)=Qw,Qe(�)=Qe,Qwe(�)=Qwe.
Thejointstateandparameterestimationcanofcoursebeunderstoodas
astateestimationproblemforanonlinearsystem.Itisafairlynatural
thingtoincludetheunknownparametersinthestatevector,andoncethis
isdone,standardKalman�lterprogramscanbeappliedfortheestimation.
Theunknownparametervector�isobtainedbyextendingthestatevector
xwiththeparametervector� x
(t)=
x(t)
�(t)
!
(C.14)
Wethenhavethestate-spaceform
x(t+1)
=
f(x(t);u(t))+
w(t)
0
!
y(t)
=
h(x(t))+e(t)
(C.15)
where
f(x(t);u(t))
=
" A(�)x(t)+B(�)u(t)
�(t)
#
h(x(t))
=
C(�)x(t)
(C.16)
Nowtheproblembelongstoanonlinear�lteringproblem.IftheEKF(C.2)
-(C.5)isapplied ^x
(t+1)=f(^x(t);u(t))+Kx(t)[y(t)�h(^x(t))]
(C.17)
^x(0)=^x0
Kx(t)
=
[F(^x(t);u(t))� P(t)HT(^x(t))+� Qwe]
�[H(^x(t))� P(t)HT(^x(t))+Qe]�1
(C.18)

276AppendixC.TheEKFasaJointstateandParameterEstimator
� P(t+1)
=
F(^x(t);u(t))� P(t)FT(^x(t);u(t))+� Qw
�Kx(t)[H(^x(t))� P(t)HT(^x(t))+Qe]KT x(t)
(C.19)
� P(0)=
� P0
where
F(^x(t);u(t))
=
@ @xf(x;u)� � � x=^x(t)
=
" A(^ �(t))
M(^ �(t);^x(t);u(t))
0
I
#
(C.20)
H(^x(t))
=
@ @xh(x)� � � x=^x(t)
=
[C(^ �(t))D(^ �(t);^x(t))]
(C.21)
� Qw
=
" Qw
0
0
0#
� Qwe
=
" Qwe
0
#
(C.22)
^x0
=
" ^x0 ^ � 0
#
� P0
=
�(^ �0)
0
0
�0
!
(C.23)
Here
M(^ �(t);^x(t);u(t))=
@ @�
(A(�)^x(t)+B(�)u(t))
� � � � �=^ �(t)
(C.24)
D(^ �(t);^x(t))=
@ @�
(C(�)^x(t))
� � � � �=^ �(t)
(C.25)
^ � 0and�0representsomeaprioriinformationabouttheparametervector
�.
C.4
Jointparameterandstateestimation
277
Introduceforshort
At=A(^ �(t))
Bt=B(^ �(t))
Ct=C(^ �(t))
Dt=D(^ �(t);^x(t))
Mt=M(^ �(t);^x(t);u(t))
IfwewritematricesKx(t)and� P(t)intheform
Kx(t)=
" Kx(t)
K�(t)
#
� P(t)=
" P1(t)
P2(t)
PT 2(t)
P3(t)
#
equations(C.17)canthenberewrittenexplicitlyas
^x(t+1)=At^x(t)+Btu(t)+Kx(t)[y(t)�Ct^x(t)]
(C.26)
^x(0)=^x0
and
^ �(t+1)=^ �(t)+K�(t)[y(t)�Ct^x(t)]
(C.27)
^ �(0)=^ � 0
Rewritingtheequation(C.18)as
Kx(t)
K�(t)
! = "At
Mt
0
I
#"P1(t)
P2(t)
PT 2(t)
P3(t)
#"CT t
DT t
# +" Qwe
0
#! �S�1
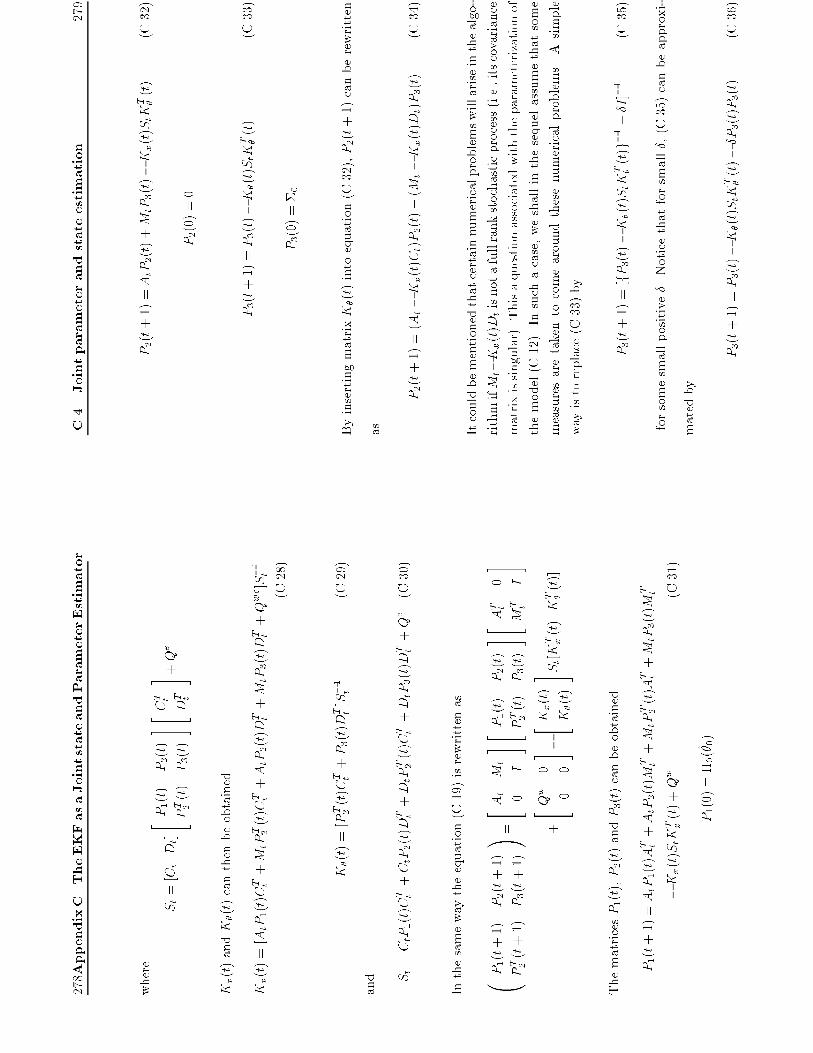
278AppendixC.TheEKFasaJointstateandParameterEstimator
where
St=[Ct
Dt]" P
1(t)
P2(t)
PT 2(t)
P3(t)
#"CT t
DT t
# +Qe
Kx(t)andK�(t)canthenbeobtained
Kx(t)=[AtP1(t)CT t
+MtPT 2(t)CT t
+AtP2(t)DT t
+MtP3(t)DT t
+Qwe]S�1t
(C.28)
K�(t)=[PT 2(t)CT t
+P3(t)DT t]S�1t
(C.29)
and S
t=CtP1(t)CT t
+CtP2(t)DT t
+DtPT 2(t)CT t
+DtP3(t)DT t
+Qe
(C.30)
Inthesamewaytheequation(C.19)isrewrittenas
P1(t+1)
P2(t+1)
PT 2(t+1)
P3(t+1)
! =" A
t
Mt
0
I
#"P1(t)
P2(t)
PT 2(t)
P3(t)
#"AT t
0
MT t
I#
+" Qw
0
0
0# �" K
x(t)
K�(t)
# St[KT x(t)KT �(t)]
ThematricesP1(t),P2(t)andP3(t)canbeobtained
P1(t+1)=AtP1(t)AT t+AtP2(t)MT t
+MtPT 2(t)AT t+MtP3(t)MT t
�Kx(t)StKT x(t)+Qw
(C.31)
P1(0)=�0(^ �0)
C.4
Jointparameterandstateestimation
279
P2(t+1)=AtP2(t)+MtP3(t)�Kx(t)StKT �(t)
(C.32)
P2(0)=0
P3(t+1)=P3(t)�K�(t)StKT �(t)
(C.33)
P3(0)=�0
ByinsertingmatrixK�(t)intoequation(C.32),P2(t+1)canberewritten
as
P2(t+1)=(At�Kx(t)Ct)P2(t)+(Mt�Kx(t)Dt)P3(t)
(C.34)
Itcouldbementionedthatcertainnumericalproblemswillariseinthealgo-
rithmifMt�Kx(t)Dtisnotafullrankstochasticprocess(i.e.,itscovariance
matrixissingular).Thisaquestionassociatedwiththeparameterizationof
themodel(C.12).Insuchacase,weshallinthesequelassumethatsome
measuresaretakentocomearoundthesenumericalproblems.Asimple
wayistoreplace(C.33)by
P3(t+1)=[fP3(t)�K�(t)StKT �(t)g�1+�I]�
1
(C.35)
forsomesmallpositive�.Noticethatforsmall�,(C.35)canbeapproxi-
matedby
P3(t+1)=P3(t)�K�(t)StKT �(t)��P3(t)P3(t)
(C.36)

280AppendixC.TheEKFasaJointstateandParameterEstimator
C.5
Convergenceanalysis
Convergenceofthealgorithm(C.26)-(C.33)willbeanalysedusingthe
ordinarydi�erentialequation(ODE)methodwhichisdevelopedbyLjung.
Weshallinthissectiondeterminethedi�erentialequationthatisassociated
withthealgorithm(C.26)-(C.33).
Thedi�erentialequationisde�nedintermsoftheprocessthat(C.26)-
(C.33)wouldproduceifthemodelparameterswerekeptconstant=�.This
meansthat(C.27)wouldbereplacedby^ �(t)=�.Consequentlyinthe
�-dependentmatrices[At;Bt;Ct;MtandDt]theestimate^ �(t)shouldbe
replacedby�.ItiseasytoseethatP2andP3wouldtendtozeroand
� P1(�)=A(�)� P1(�)AT(�)+Qw�� Kx(�)� S(�)� KT x(�)
(C.37)
� S(�)=C(�)� P1(�)CT(�)+Qe
(C.38)
� Kx(�)=[A(�)� P1(�)CT(�)+Qwe]� S�1(�)
(C.39)
Thende�netheprocess� ^x(t;�)astheestimatesthatwouldbeobtainedwith
thisconstantmodel,correspondingtotheparametersvalue�
� ^x(t+1;�)=A(�)� ^x(t;�)+B(�)u(t)+� Kx(�)��(t;�)
(C.40)
where
��(t;�)=y(t)�C(�)� ^x(t;�)
(C.41)
ItisnaturaltointerprettheEKFasanattempttominimizetheexpected
valueofthesquaredresidualsassociatedwithmodel�.Asuitablecriterion
toseektominimizewouldbe V
(�)=Ej��(t;�)j2
(C.42)
C.5
Convergenceanalysis
281
AreasonableadjustmentschemetoachieveminimizationofV(�)shouldbe
relatedtothegradientofV(�)
d d�
V(�)=2E
��d d
���T(t;�)� ��(t;�)
�
(C.43)
Denotethematrix
�d d
���T(t;�)=
� (t;�)
(C.44)
ThenthenegativegradientofV(�)canbewritten
�d d
�V(�)=2E� (t;�)��(t;�)
(C.45)
theparametervaluesof�wouldbecorrectedinthisdirection.
Di�erentiating(C.41)gives
d d�
��(t;�)=�
� d d�
C(�)� � ^x(t;�)�C(�)
� d d�
� ^x(t;�)�
(C.46)
whered=d�� ^x(t;�)canbefoundbydi�erentiating(C.40)
d d�
� ^x(t+1;�)=[A(�)�� Kx(�)C(�)]
d d�
� ^x(t;�)+
� d d�
A(�)� � ^x(t;�)
+� d d
�B(�)� u(t)�� Kx(�)
� d d�
C(�)� � ^x(t;�)
(C.47)
+� d d
�� Kx(�)� ��(t;�)
Furthermorewede�ne�w(t;�)=d=d�� ^x(t;�)
�w(t+1;�)=[A(�)�� Kx(�)C(�)]�w(t;�)
+[M(�;� ^x(t;�);u(t))�� Kx(�)D(�;� ^x(t;�))]
(C.48)
+� d d
�� Kx(�)� ��(t;�)
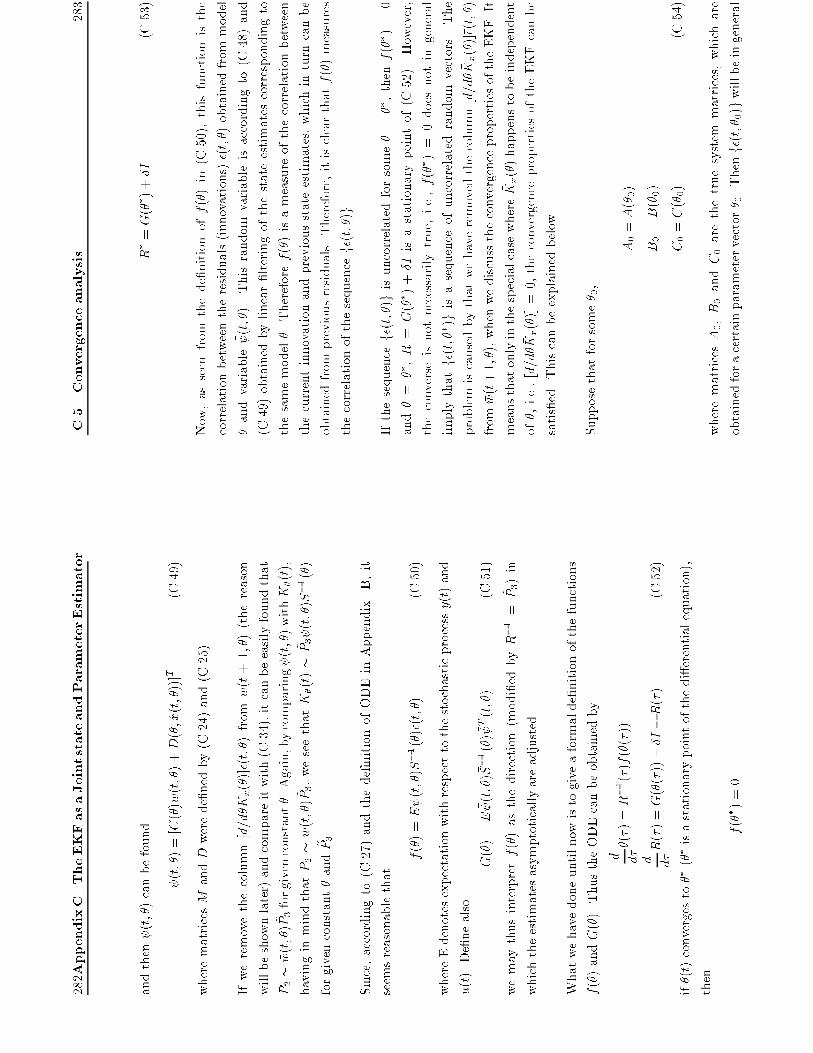
282AppendixC.TheEKFasaJointstateandParameterEstimator
andthen� (t;�)canbefound
� (t;�)=[C(�)�w(t;�)+D(�;� ^x(t;�))]T
(C.49)
wherematricesM
andDwerede�nedby(C.24)and(C.25).
Ifweremovethecolumn[d=d�� Kx(�)]��(t;�)from
�w(t+1;�)(thereason
willbeshownlater)andcompareitwith(C.34),itcanbeeasilyfoundthat
P2��w(t;�)~ P3forgivenconstant�.Again,bycomparing� (t;�)withK�(t),
havinginmindthatP2��w(t;�)~ P3,weseethatK�(t)�~ P3� (t;�)� S�1(�)
forgivenconstant�and~ P3.
Since,accordingto(C.27)andthede�nitionofODEinAppendix
B,it
seemsreasonablethat
f(�)=E� (t;�)� S�1(�)��(t;�)
(C.50)
whereEdenotesexpectationwithrespecttothestochasticprocessy(t)and
u(t).De�nealso
G(�)=E� (t;�)� S�1(�)� T(t;�)
(C.51)
wemaythusinterpretf(�)asthedirection(modi�edbyR�1
=
~ P3)in
whichtheestimatesasymptoticallyareadjusted.
Whatwehavedoneuntilnowistogiveaformalde�nitionofthefunctions
f(�)andG(�).ThustheODEcanbeobtainedby
d d�
�(�)=R�1(�)f(�(�))
d d�
R(�)=G(�(�))+�I�R(�)
(C.52)
if�(t)convergesto��(��isastationarypointofthedi�erentialequation),
then
f(�� )=0
C.5
Convergenceanalysis
283
R�=G(�� )+�I
(C.53)
Now,asseenfrom
thede�nitionoff(�)in(C.50),thisfunctionisthe
correlationbetweentheresiduals(innovations)��(t;�)obtainedfrommodel
�andvariable� (t;�).Thisrandom
variableisaccordingto(C.48)and
(C.49)obtainedbylinear�lteringofthestateestimatescorrespondingto
thesamemodel�.Thereforef(�)isameasureofthecorrelationbetween
thecurrentinnovationandpreviousstateestimates,whichinturncanbe
obtainedfrompreviousresiduals.Therefore,itisclearthatf(�)measures
thecorrelationofthesequencef��(t;�)g.
Ifthesequencef��(t;�)gisuncorrelatedforsome�=��,thenf(�� )=0
and�=
��,R
=
G(�� )+�Iisastationarypointof(C.52).However,
theconverseisnotnecessarilytrue,i.e.,f(�� )=
0doesnotingeneral
implythatf��(t;�� )gisasequenceofuncorrelatedrandom
vectors.The
problemiscausedbythatwehaveremovedthecolumn[d=d�� Kx(�)]��(t;�)
from
�w(t+1;�),whenwediscusstheconvergencepropertiesoftheEKF.It
meansthatonlyinthespecialcasewhere� Kx(�)happenstobeindependent
of�,i.e.,[d=d�� Kx(�)]=0,theconvergencepropertiesoftheEKFcanbe
satis�ed.Thiscanbeexplainedbelow.
Supposethatforsome� 0,
A0=A(�0)
B0=B(�0)
C0=C(�0)
(C.54)
wherematricesA0,B0
andC0
arethetruesystem
matrices,whichare
obtainedforacertainparametervector� 0.Thenf��(t;�0)gwillbeingeneral
284AppendixC.TheEKFasaJointstateandParameterEstimator
anorthogonalsequenceonlyif
� K0=
� Kx(�0)
(C.55)
where� K0isde�nedby(C.11)and� Kx(�0)by(C.39).Thisconditionholds
onlyiftheassumptionsaboutnoisestructureofthemodel(C.13)arein
accordancewiththoseofthetruesystem(C.7).Consequently,avalue� 0
correspondingtothetruesystem
willingeneralbeastationarypointof
(C.52)andhenceapossibleconvergencepointonlyiftheassumednoise
structurecoincideswiththetrueone.Otherwisetheestimateswillbebi-
ased.
Itisofcoursesomewhatunrealistictoassumethatthenoisestructureofthe
systemisknown,whilethedynamicsofthesystemareunknown.However
wemightexpecttheimprovedasymptoticconvergencepropertiesofthe
EKFif[d=d�� Kx(�)]�(t),where�(t)isthecurrentresidual,isaddedtothe
matrixMtinthealgorithm(C.26)-(C.33).Ljunginhispaper[Ljung79b]
givesamodi�edalgorithmandaGauss-Newtonalgorithmbyusinginnova-
tionsmodel.Thesetwoalgorithmshavethesameasymptoticconvergence
properties.TheGauss-Newtonalgorithmcouldbecalledarecursivepre-
dictionerroralgorithmwhichisgivenisAppendixD.
AppendixD
TheRPEMethodApplied
totheInnovationsModel
Therecursivepredictionerror(RPE)methodappliedtoaninnovations
modelisgivenbyLjunginhisbookTheoryandPracticeofRecursiveIden-
ti�cation[LjungandS�oderstr�om83].
D.1
Themodel
Thee�ectoftheassumptionsassociatedwiththenoisecovariancematrices
Qw(�),Qe(�)andQwe(�)instate-spacemodel(C.12)-(C.13)inAppendix
CisinfactonlytoprovidetheKalman�ltergain.Itisthisgainthathas
thealgorithmicimportance.Thenoiseassumptionsareonlythevehiclesto
285
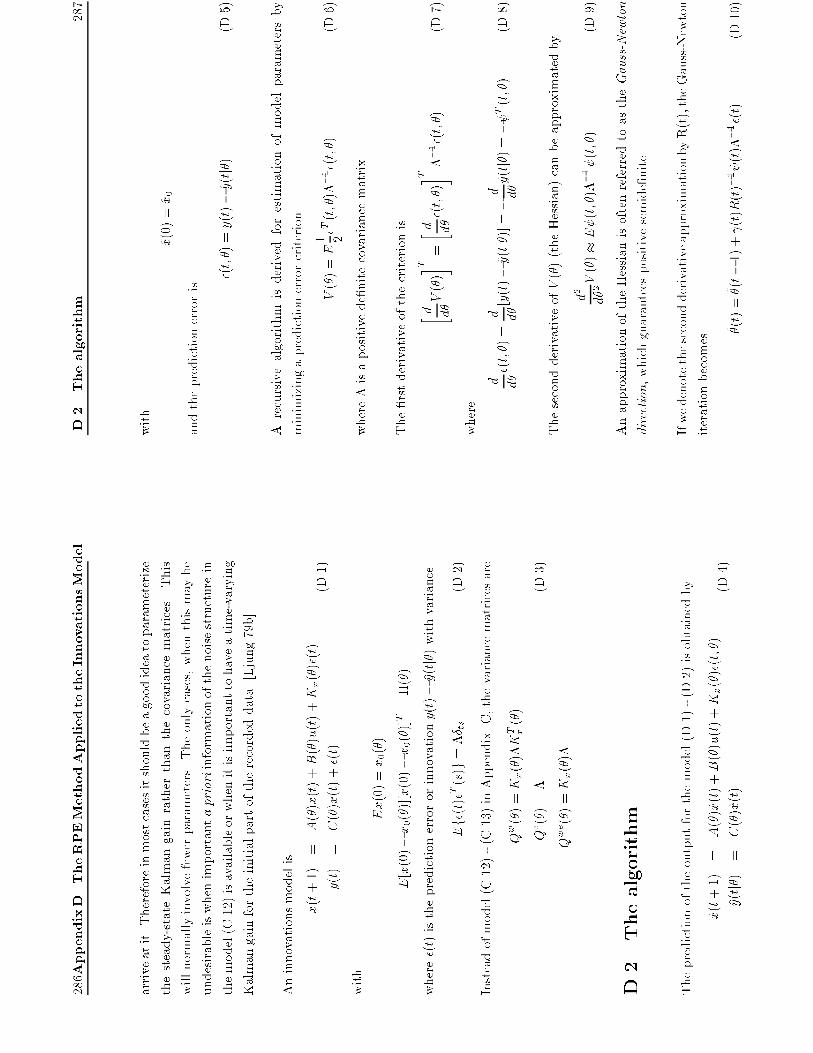
286AppendixD.TheRPEMethodAppliedtotheInnovationsModel
arriveatit.Thereforeinmostcasesitshouldbeagoodideatoparameterize
thesteady-stateKalmangainratherthanthecovariancematrices.This
willnormallyinvolvefewerparameters.Theonlycases,whenthismaybe
undesirableiswhenimportantaprioriinformationofthenoisestructurein
themodel(C.12)isavailableorwhenitisimportanttohaveatime-varying
Kalmangainfortheinitialpartoftherecordeddata[Ljung79b].
Aninnovationsmodelis
x(t+1)
=
A(�)x(t)+B(�)u(t)+Kx(�)�(t)
y(t)
=
C(�)x(t)+�(t)
(D.1)
with
Ex(0)=x0(�)
E[x(0)�x0(�)][x(0)�x0(�)]T
=�(�)
where�(t)isthepredictionerrororinnovationy(t)�^y(tj�)withvariance
Ef�(t)�T(s)g=�� ts
(D.2)
Insteadofmodel(C.12)-(C.13)inAppendixC,thevariancematricesare
Qw(�)=Kx(�)�KT x(�)
Qe(�)=�
(D.3)
Qwe(�)=Kx(�)�
D.2
Thealgorithm
Thepredictionoftheoutputforthemodel(D.1)-(D.2)isobtainedby
^x(t+1)
=
A(�)^x(t)+B(�)u(t)+Kx(�)�(t;�)
^y(tj�)=
C(�)^x(t)
(D.4)
D.2
Thealgorithm
287
with
^x(0)=^x0
andthepredictionerroris
�(t;�)=y(t)�^y(tj�)
(D.5)
Arecursivealgorithm
isderivedforestimationofmodelparametersby
minimizingapredictionerrorcriterion
V(�)=E
1 2�T(t;�)��1�(t;�)
(D.6)
where�isapositivede�nitecovariancematrix.
The�rstderivativeofthecriterionis
� d d�
V(�)� T =
� d d�
�(t;�)
� T ��1�(t;�)
(D.7)
where
d d�
�(t;�)=
d d�
[y(t)�^y(tj�)]=�
d d�
^y(tj�)=� T(t;�)
(D.8)
ThesecondderivativeofV(�)(theHessian)canbeapproximatedby
d2
d�2
V(�)�E (t;�)��1 (t;�)
(D.9)
AnapproximationoftheHessianisoftenreferredtoastheGauss-Newton
direction,whichguaranteespositivesemide�nite.
IfwedenotethesecondderivativeapproximationbyR(t),theGauss-Newton
iterationbecomes
^ �(t)=^ �(t�1)+ (t)R(t)�1 (t)��1�(t)
(D.10)
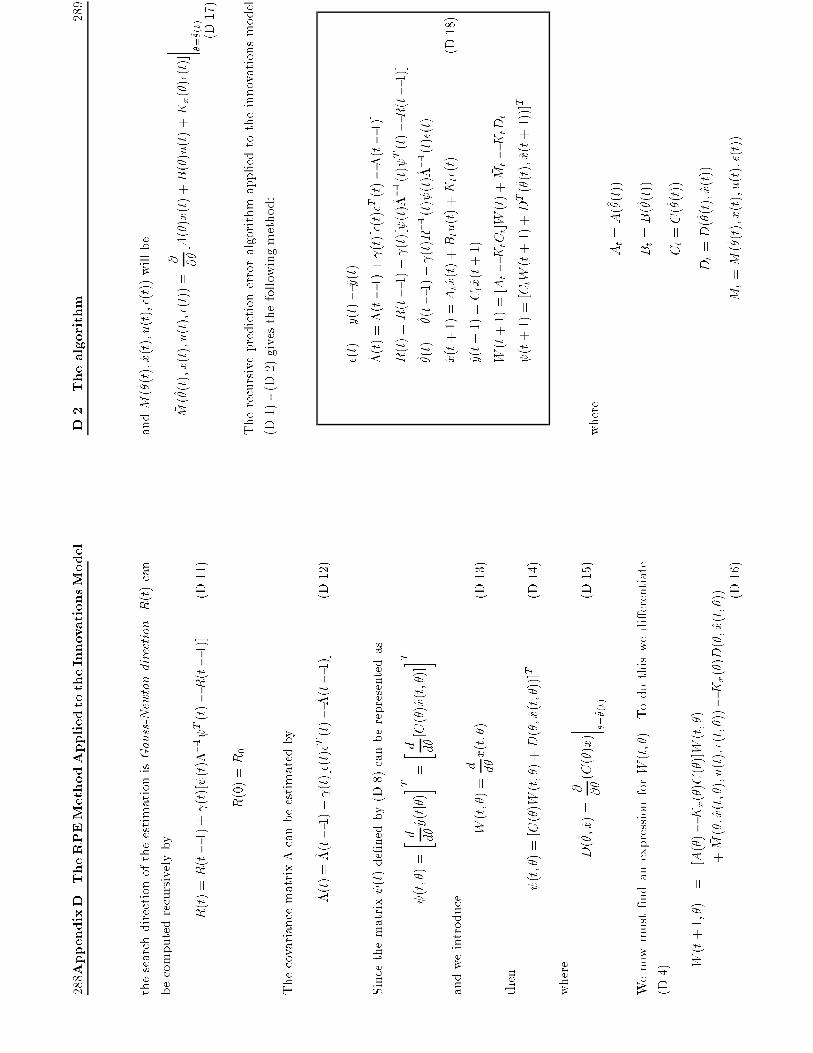
288AppendixD.TheRPEMethodAppliedtotheInnovationsModel
thesearchdirectionoftheestimationisGauss-Newtondirection.R(t)can
becomputedrecursivelyby
R(t)=R(t�1)+ (t)[ (t)��1 T(t)�R(t�1)]
(D.11)
R(0)=R0
Thecovariancematrix�canbeestimatedby
^ �(t)=^ �(t�1)+ (t)[�(t)�T(t)�^ �(t�1)]
(D.12)
Sincethematrix (t)de�nedby(D.8)canberepresentedas
(t;�)=
� d d�
^y(tj�)
� T =� d d
�[C(�)^x(t;�)]
� T
andweintroduce
W(t;�)=
d d�
^x(t;�)
(D.13)
then
(t;�)=[C(�)W(t;�)+D(�;^x(t;�))]T
(D.14)
where
D(^ �;^x)=
@ @�
(C(�)^x)� � � � �=^ �
(t)
(D.15)
Wenowmust�ndanexpressionforW(t;�).Todothiswedi�erentiate
(D.4) W
(t+1;�)
=
[A(�)�Kx(�)C(�)]W(t;�)
+
� M(�;^x(t;�);u(t);�(t;�))�Kx(�)D(�;^x(t;�)) (D
.16)
D.2
Thealgorithm
289
and� M(^ �(t);^x(t);u(t);�(t))willbe
� M(^ �(t);^x(t);u(t);�(t))=
@ @�
[A(�)^x(t)+B(�)u(t)+Kx(�)�(t)]
� � � � �=^ �(t)
(D.17)
Therecursivepredictionerroralgorithmappliedtotheinnovationsmodel
(D.1)-(D.2)givesthefollowingmethod:
�(t)=y(t)�^y(t)
^ �(t)=^ �(t�1)+ (t)[�(t)�T(t)�^ �(t�1)]
R(t)=R(t�1)+ (t)[ (t)^ ��1(t) T(t)�R(t�1)]
^ �(t)=^ �(t�1)+ (t)R�1(t) (t)^ ��1(t)�(t)
^x(t+1)=At^x(t)+Btu(t)+Kt�(t)
(D.18)
^y(t+1)=Ct^x(t+1)
W(t+1)=[At�KtCt]W(t)+
� Mt�KtDt
(t+1)=[CtW(t+1)+DT(^ �(t);^x(t+1))]T
where
At=A(^ �(t))
Bt=B(^ �(t))
Ct=C(^ �(t))
Dt=D(^ �(t);^x(t))
� Mt=
� M(^ �(t);^x(t);u(t);�(t))
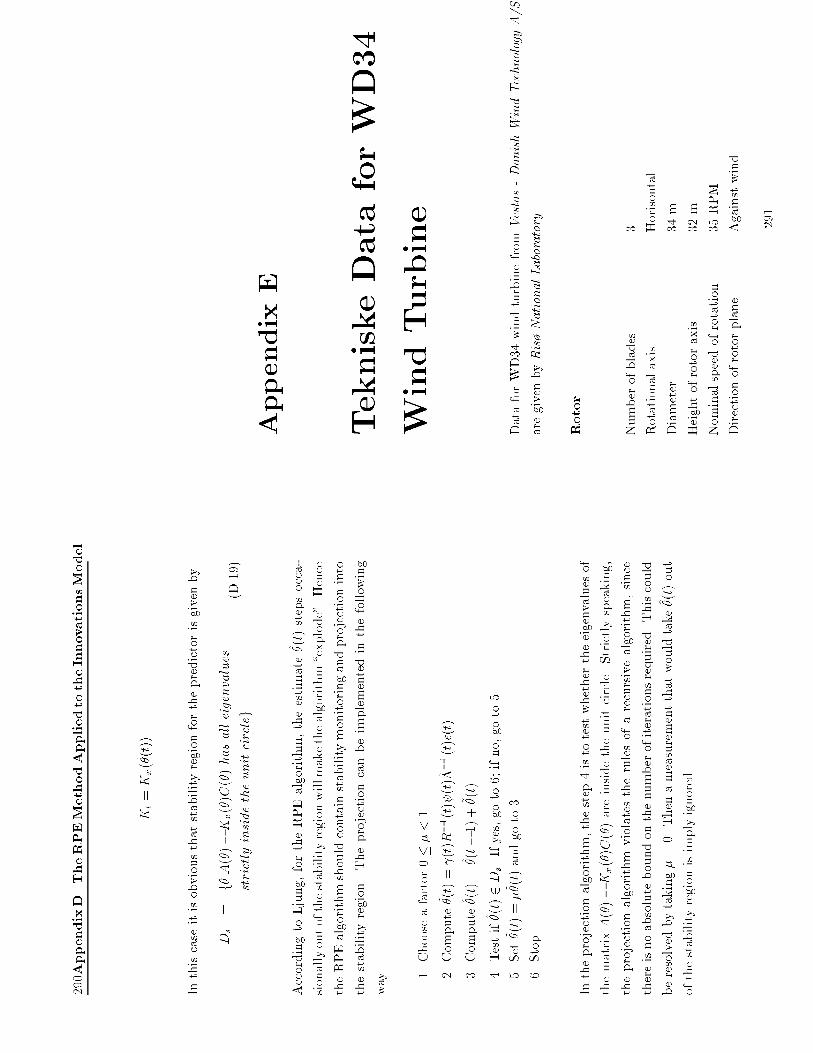
290AppendixD.TheRPEMethodAppliedtotheInnovationsModel
Kt=Kx(^ �(t))
Inthiscaseitisobviousthatstabilityregionforthepredictorisgivenby
Ds
=
f�jA(�)�Kx(�)C(�)hasalleigenvalues
strictlyinsidetheunitcircleg
(D.19)
AccordingtoLjung,fortheRPEalgorithm,theestimate^ �(t)stepsocca-
sionallyoutofthestabilityregionwillmakethealgorithm\explode".Hence
theRPEalgorithmshouldcontainstabilitymonitoringandprojectioninto
thestabilityregion.Theprojectioncanbeimplementedinthefollowing
way. 1.
Chooseafactor0��<1
2.Compute~ �(t)= (t)R�1(t) (t)^ ��1(t)�(t)
3.Compute^ �(t)=^ �(t�1)+~ �(t)
4.Testif^ �(t)2Ds.Ifyes,goto6;ifno,goto5
5.Set~ �(t)=�~ �(t)andgoto3
6.Stop
Intheprojectionalgorithm,thestep4istotestwhethertheeigenvaluesof
thematrixA(�)�Kx(�)C(�)areinsidetheunitcircle.Strictlyspeaking,
theprojectionalgorithmviolatestherulesofarecursivealgorithm,since
thereisnoabsoluteboundonthenumberofiterationsrequired.Thiscould
beresolvedbytaking�=0.Thenameasurementthatwouldtake^ �(t)out
ofthestabilityregionisimplyignored.
AppendixE
TekniskeDataforWD34
WindTurbine
DataforWD34windturbinefromVestas-DanishWindTechnologyA/S
aregivenbyRis�NationalLaboratory.
Rotor
Numberofblades
3
Rotationalaxis
Horisontal
Diameter
34m
Heightofrotoraxis
32m
Nominalspeedofrotation
35RPM
Directionofrotorplane
Againstwind
291
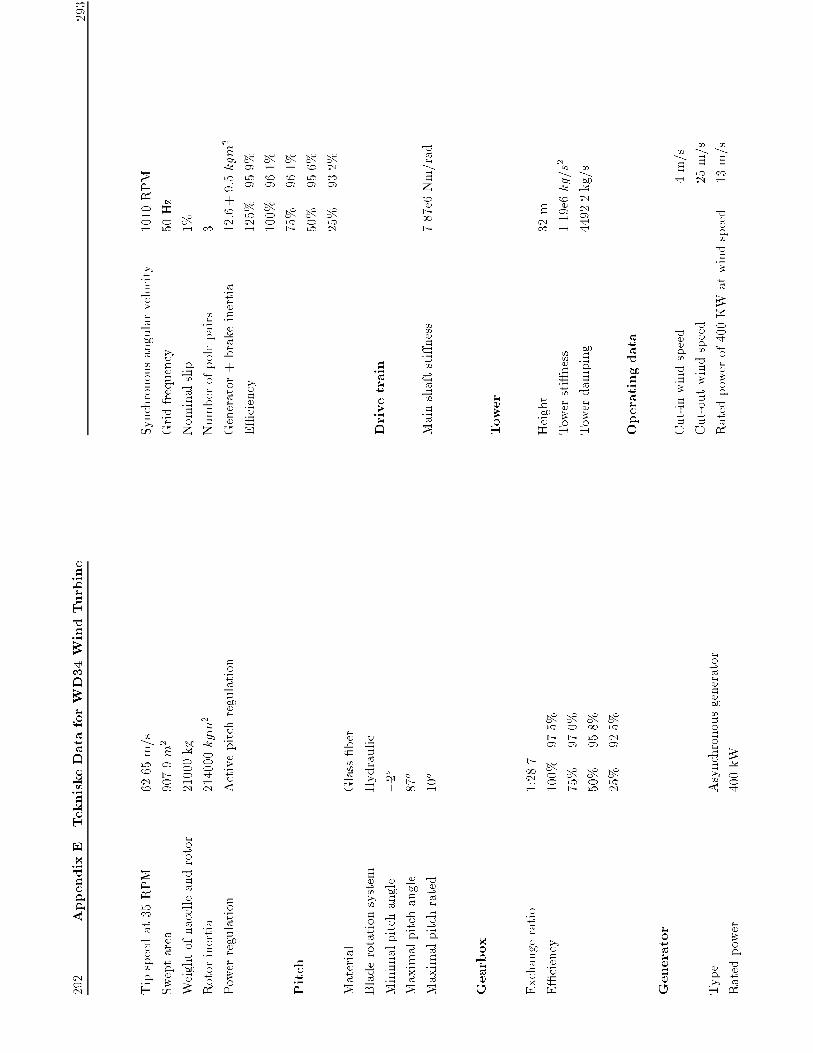
292
AppendixE.TekniskeDataforWD34WindTurbine
Tipspeedat35RPM
62.65m/s
Sweptarea
907.9m2
Weightofnacelleandrotor
21000kg
Rotorinertia
214000kgm2
Powerregulation
Activepitchregulation
Pitch
Material
Glass�ber
Bladerotationsystem
Hydraulic
Minimalpitchangle
�2o
Maximalpitchangle
87o
Maximalpitchrated
10o
Gearbox
Exchangeratio
1:28.7
E�ciency
100%
97.5%
75%
97.0%
50%
95.8%
25%
92.5%
Generator
Type
Asynchronousgenerator
Ratedpower
400kW
293
Synchronousangularvelocity
1010RPM
Gridfrequency
50Hz
Nominalslip
1%
Numberofpolepairs
3
Generator+brakeinertia
12:6+9:5kgm2
E�ciency
125%
95.9%
100%
96.1%
75%
96.1%
50%
95.6%
25%
93.2%
Drivetrain
Mainshaftsti�ness
7.87e6Nm/rad
Tower
Height
32m
Towersti�ness
1.19e6kg=s2
Towerdamping
4492.2kg/s
Operatingdata
Cut-inwindspeed
4m/s
Cut-outwindspeed
25m/s
Ratedpowerof400KW
atwindspeed
13m/s

294
AppendixE.TekniskeDataforWD34WindTurbine
295
Ph.D.thesesfrom
IM
M
1.Larsen,Rasmus.(1994).Estimationofvisualmotioninimage
sequences.xiv+143pp.
2.Rygard,JensMoberg.(1994).Designandoptimizationof exible
manufacturingsystems.xiii+232pp.
3.Lassen,NielsChristianKrieger.(1994).Automateddetermina-
tionofcrystalorientationsfromelectronbackscatteringpatterns.xv
+136pp.
4.Melgaard,Henrik.(1994).Identi�cationofphysicalmodels.xvii
+246pp.
5.Wang,Chunyan.(1994).Stochasticdi�erentialequationsanda
biologicalsystem.xxii+153pp.
6.Nielsen,AllanAasbjerg.(1994).Analysisofregularlyandirreg-
ularlysampledspatial,multivariate,andmulti-temporaldata.xxiv+
213pp.
7.Ersb�ll,AnnetteKj�r.(1994).Onthespatialandtemporalcorre-
lationsinexperimentationwithagriculturalapplications.xviii+345
pp.
8.M�ller,Dorte.(1994).Methodsforanalysisanddesignofhetero-
geneoustelecommunicationnetworks.Volume1-2,xxxviii+282pp.,
283-569pp.
9.Jensen,JensChristian.
(1995).
Teoretiskeogeksperimentelle
dynamiskeunders�gelserafjernbanek�ret�jer.ATVErhvervsforsker-
projektEF435.viii+174pp.
296
AppendixE.TekniskeDataforWD34WindTurbine
10.Kuhlmann,Lionel.(1995).Onautomaticvisualinspectionofre-
ectivesurfaces.ATVErhvervsforskerprojektEF385.Volume1,xviii
+220pp.,(Volume2,vi+54pp.,fortrolig).
11.Lazarides,Nikolaos.(1995).Nonlinearityinsuperconductivityand
JosephsonJunctions.iv+154pp.
12.Rostgaard,Morten.(1995).Modelling,estimationandcontrolof
fastsampleddynamicalsystems.xiv+348pp.
13.Schultz,Nette.(1995).Segmentationandclassi�cationofbiological
objects.xiv+194pp.
14.J�rgensen,MichaelFinn.(1995).NonlinearHamiltoniansystems.
xiv+120pp.
15.Balle,SusanneM.(1995).Distributed-memorymatrixcomputa-
tions.iii+101pp.
16.Kohl,Niklas.(1995).Exactmethodsfortimeconstrainedrouting
andrelatedschedulingproblems.xviii+234pp.
17.Rogon,Thomas.(1995).Porousmedia:Analysis,reconstruction
andpercolation.xiv+165pp.
18.Andersen,AllanTheodor.(1995).Modellingofpackettra�cwith
matrixanalyticmethods.xvi+242pp.
19.Hesthaven,Jan.(1995).Numericalstudiesofunsteadycoherent
structuresandtransportintwo-dimensional ows.Ris�-R-835(EN)
203pp.
20.Slivsgaard,EvaCharlotte.(l995).Ontheinteractionbetween
wheelsandrailsinrailwaydynamics.viii+196pp.
297
21.Hartelius,Karsten.
(1996).
Analysisofirregularlydistributed
points.xvi+260pp.
22.Hansen,AncaDaniela.(1996).Predictivecontrolandidenti�ca-
tion-Applicationstosteeringdynamics.xviii+307pp.
23.Sadegh,Payman.(1996).Experimentdesignandoptimizationin
complexsystems.xiv+162pp.
24.Skands,Ulrik.(1996).Quantitativemethodsfortheanalysisof
electronmicroscopeimages.xvi+198pp.
25.Bro-Nielsen,Morten.(1996).Medicalimageregistrationandsurge r
simulation.xxvii+274pp.
26.Bendtsen,Claus.(1996).Parallelnumericalalgorithmsforthe
solutionofsystemsofordinarydi�erentialequations.viii+79pp.
27.Lauritsen,MortenBach.(1997).Delta-domainpredictivecontrol
andidenti�cationforcontrol.xxii+292pp.
28.Bischo�,Svend.
(1997).ModellingColliding-pulsemode-locked
semiconductorlasers.xxii+217pp.
29.Arnbjerg-Nielsen,Karsten.(1997).Statisticalanalysisofurban
hydrologywithspecialemphasisonrainfallmodelling.Institutfor
Milj�teknik,DTU.xiv+161pp.
30.Jacobsen,JudithL.(1997).Dynamicmodellingofprocessesin
riversa�ectedbyprecipitationruno�.xix+215pp.
31.Sommer,HelleM�lgaard.(1997).Variabilityinmicrobiological
degradationexperiments.-Analysisandcasestydy.xiv+211pp.
298
AppendixE.TekniskeDataforWD34WindTurbine
32.Ma,Xin.(1997).Adaptiveextremumcontrolandwindturbinecon-
trol.xix+293pp.