vehicle-to-x communication using millimeter waves (just...
TRANSCRIPT

Slides © Robert W. Heath Jr. (2016)
Vehicle-to-X communication using millimeter waves (just in time for 5G)
Professor Robert W. Heath Jr., PhD, PE
Wireless Networking and Communications GroupDepartment of Electrical and Computer EngineeringThe University of Texas at Austin
www.profheath.org
Thanks to sponsors including the U.S. Department of Transportation through the Data-Supported Transportation Operations and Planning (D-STOP) Tier 1 University Transportation Center, the Texas Department of Transportation under Project 0-6877 entitled “Communications and Radar- Supported Transportation Operations and Planning (CAR-STOP)”, National Instruments, Huawei, and Toyota IDC

Slides © Robert W. Heath Jr. (2016)
Automated vehicles and 5G
2

Slides © Robert W. Heath Jr. (2016)
3
Fifth generation (5G) cellular communication
Multidimensional objectives* New industry verticals**
* Recommendation ITU-R M.2083-0, “IMT Vision – Framework and overall objectives of the future development of IMT for 2020 and beyond,” September 2015** “5G empowering vertical industries,” 5GPPP White Paper, Feb. 2016
Aut
omot
ive
Med
ia &
Ent
erta
inm
ent
e-H
ealth
Higher rates
Lower latency
Fact
ory
of th
e Fu
ture
Ener
gy
Mobility
Spectrumefficiency
Userexp.
data rate
Peakdata rate
Energyefficiency
Areatraffic
capacity
LatencyConnectiondensity

Slides © Robert W. Heath Jr. (2016)
Trends in vehicle automation
4
INCREASING NUMBER OF SENSORS
CONNECTEDCAR
*5G-PPP White Paper on Automotive Vertical Sector, October 2015, https://5g-ppp.eu/white-papers/
Higherautomation
levels
TRAFFICEFFICIENCY
SELFDRIVING
DRIVERASSIST

Slides © Robert W. Heath Jr. (2016)
5
Myths surrounding automated vehicles
Automated vehicles can be fully autonomous, no communication is required
MYTH 1
Infrastructure has no value for automated vehicles
MYTH 2

Slides © Robert W. Heath Jr. (2016)
Expand the sensing range of the vehicle
Allows interactions between vehicles with
different automation levels
More informed safety decisions
Benefits of communication
Higher levels of traffic coordination like platooning

Slides © Robert W. Heath Jr. (2016)
10
Benefits of infrastructureCan be used for other functions, for example
more precise navigation
Supports sensing of the environment, does not require
all cars to have complete sensing equipment
Helps coordinate traffic through intersections,
eliminating lightsEffective with non-connected cars, bicycles, and pedestrians

Slides © Robert W. Heath Jr. (2016)
8
Where is thecommunicationtheory and signalprocessing research?
What are the datarate requirements for
sensors?
Key questions
What are the capabilities of current automotivecommunication solutions?

Slides © Robert W. Heath Jr. (2016)
State-of-the-art invehicular sensing
9

Slides © Robert W. Heath Jr. (2016)
10
Current technologies for vehicular sensing
Powerful sensing technologies with limited range in traffic conditions
Sensor Range(ideal)
Radar 200m
Camera 30m
LIDAR 100m
Sensor Range(traffic)
Radar 3-5m
Camera 3-5m
LIDAR 3-5m

Slides © Robert W. Heath Jr. (2016)
Sensor applications and data rates
11
Automotive sensors generate a huge amount of data
Purpose Drawback DatarateRadar Targetdetection,
velocityestimationHardtodistinguishtargets
Lessthan1Mbps
Camera Virtualmirrorsfordrivers
Needcomputervisiontechniques
100-700Mbpsforrawimages,10-90Mbpsforcompressedimages
LIDAR Targetdetectionandrecognition,velocityestimation
Highcost 10-100Mbps

Slides © Robert W. Heath Jr. (2016)
12
State-of-the-art inconnected cars

Slides © Robert W. Heath Jr. (2016)
Connectivity for automated vehicles
13
Connectivitygives access to a
richer set of sensor data
Connectivity solves key challenges of
automated driving in congested urban areas
Connectivitymotivates 5G and the
application of millimeter wave
Automated cars may have limited connectivity
Is it possible to exchange raw sensor data between cars with current technology?
Automated carsshould exploit connectivity
Slides © Robert W. Heath Jr. (2016)
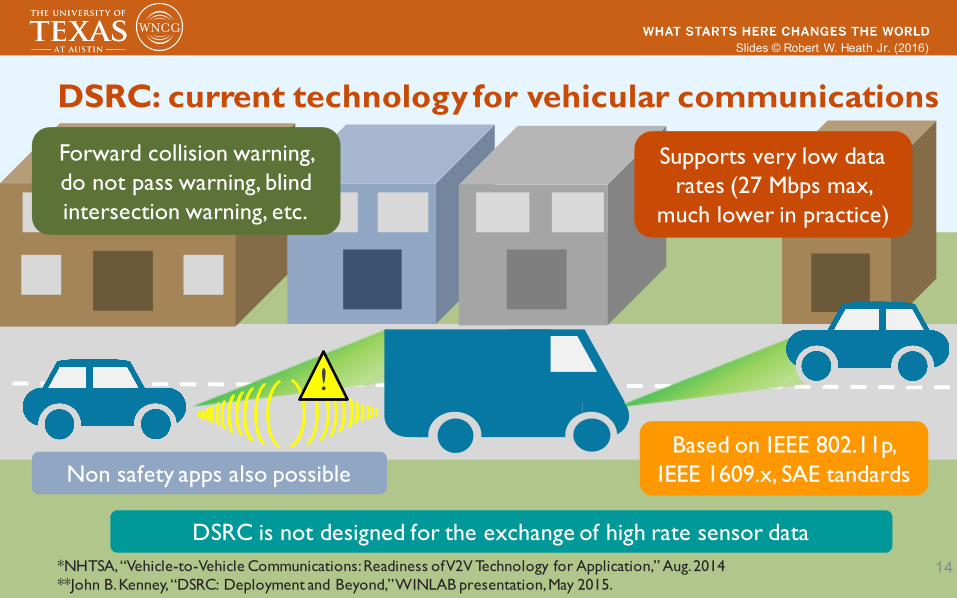
DSRC: current technology for vehicular communications
!
Forward collision warning, do not pass warning, blind intersection warning, etc.
14
DSRC is not designed for the exchange of high rate sensor data
Based on IEEE 802.11p, IEEE 1609.x, SAE tandards
*NHTSA, “Vehicle-to-Vehicle Communications: Readiness of V2V Technology for Application,” Aug. 2014**John B. Kenney, “DSRC: Deployment and Beyond,” WINLAB presentation, May 2015.
Supports very low data rates (27 Mbps max,
much lower in practice)
Non safety apps also possible
Slides © Robert W. Heath Jr. (2016)
15
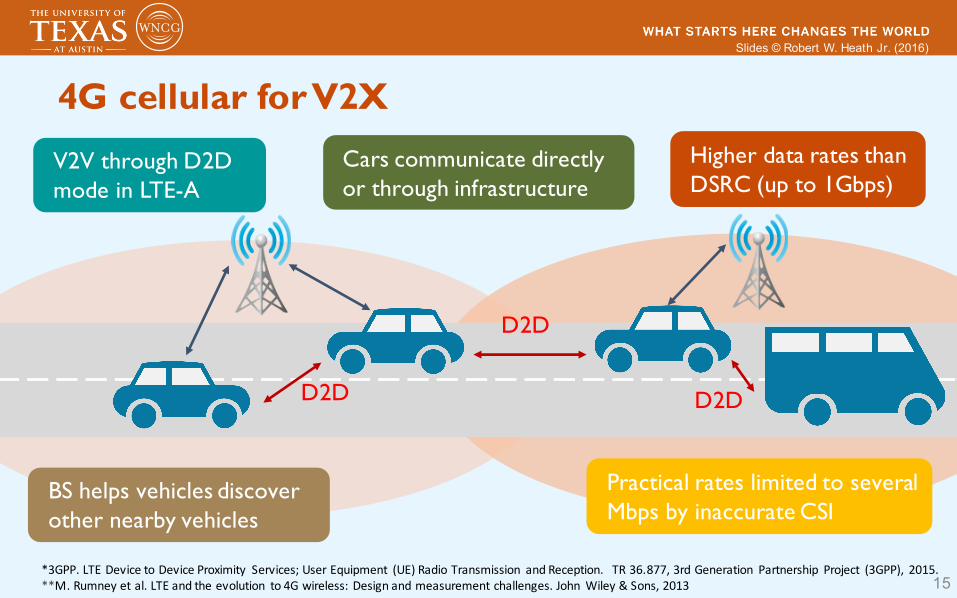
4G cellular forV2X
*3GPP.LTEDevicetoDeviceProximity Services;UserEquipment (UE)RadioTransmission andReception. TR36.877,3rdGeneration Partnership Project (3GPP), 2015.**M.Rumney etal.LTEandtheevolution to4Gwireless:Designandmeasurementchallenges.JohnWiley&Sons,2013
D2D
D2D
V2V through D2D mode in LTE-A
BS helps vehicles discover other nearby vehicles
Cars communicate directlyor through infrastructure
Higher data rates than DSRC (up to 1Gbps)
Practical rates limited to several Mbps by inaccurate CSI
D2D

Slides © Robert W. Heath Jr. (2016)
DSRC versus LTE-A forV2X
Features DSRC LTE-A
Channel width 10 MHz Up to 100 MHz
Frequency Band 5.86–5.92 GHz 450 MHz–4.99 GHz
Bit Rate 3–27 Mb/s 100’s of Mb/s to 1 Gb/s
Range Up to 1 km Up to 30 km
Capacity Medium Very high
Coverage Intermittent Ubiquitous
Mobility support Medium High
Market penetration Low Potentially high
16*Giuseppe Araniti et al., “LTE for Vehicular Networking: A Survey”, IEEE Commun. Mag., May 2013
Gbps data rates are not supported
LTE-A is interesting because of its wide expected coverage*

Slides © Robert W. Heath Jr. (2016)
Massive data rates from sensors vs DSRC/4G
17
New communication solution is needed for connected cars*http://low-powerdesign.com/sleibson/2011/05/01/future-cars-the-word-from-gm-at-idc’s-smart-technology-world-conference/**Cisco, “The Internet of Cars: A Catalyst to Unlock Societal Benefits of Transportation,” Mar. 2013***http://www.sas.com/en_us/insights/articles/big-data/the-internet-of-things-and-connected-cars.html
Automated vehicles can generate up 1 TB per
hour of driving
Current connected vehicles are expected to
drive 1.5GB monthly data in 2017**
4G and DSRC can not supportthese data rates
Handled with a combination of 4G and DSRC

Slides © Robert W. Heath Jr. (2016)
Millimeter wave and 5G forconnected cars
18
5G

Slides © Robert W. Heath Jr. (2016)
Millimeter wave for automated cars
19
MmWave is the only viable approach for high bandwidth connected vehicles*
V2V communication beams
Vehicle driving cloud
directionalbeamforming
blockageV2I communicationbeam
Joint communicationand radar is possible
*Junil Choi, Nuria González-Prelcic, Robert Daniels, Chandra R. Bhat, and Robert W. Heath Jr, “Millimeter Wave Vehicular Communication to Support Massive Sensing”, to appear in IEEE Communications Magazine.
Sensing technologies can be used to help establish mmWave links
Exchanging raw sensor data is possibe
Enables high data rateinfotainment applications
Slides © Robert W. Heath Jr. (2016)
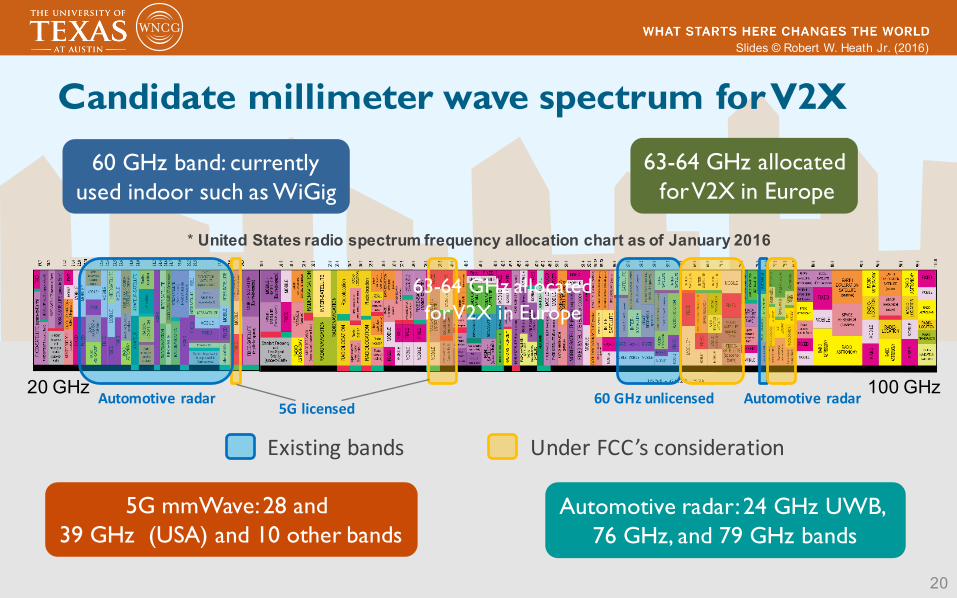
Candidate millimeter wave spectrum for V2X
20
20 GHz
* United States radio spectrum frequency allocation chart as of January 2016
60GHzunlicensed 100 GHz
UnderFCC’sconsiderationExistingbands
Automotive radar Automotive radar5Glicensed
60 GHz band: currently used indoor such as WiGig
63-64 GHz allocated for V2X in Europe
63-64 GHz allocatedforV2X in Europe
5G mmWave: 28 and 39 GHz (USA) and 10 other bands
Automotive radar: 24 GHz UWB, 76 GHz, and 79 GHz bands

Slides © Robert W. Heath Jr. (2016)
© Robert W. Heath Jr. 21
Potential bandwidths and data rates at mmWave
10x to 100x gains in bandwidth going to mmWave
* IEEE 802.11ad is commercially available
Totalspectrum
Typicalbandwidth
Peakrates
IEEE802.11ad*in60GHz
7GHz 2GHz 6Gbps
IEEE802.11ayin60GHz
7GHz 4 GHz 100Gbps
28GHz5G 0.85GHz 200MHz 1.5Gbps39GHz5G 3GHz 400MHz 3GbpsEband5G 10GHz 2GHz 24Gbps
Slides © Robert W. Heath Jr. (2016)
22
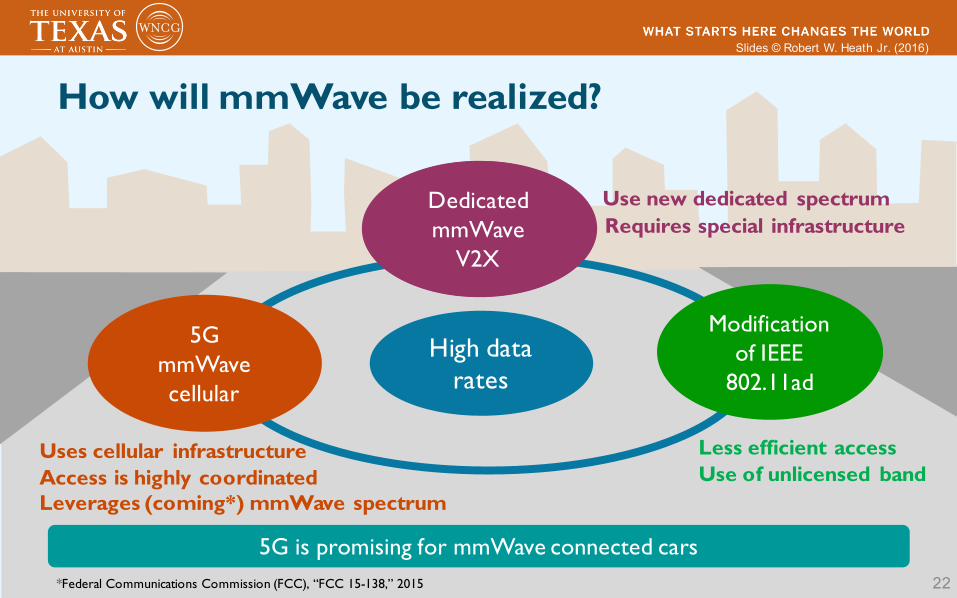
How will mmWave be realized?
5G is promising for mmWave connected cars
High data rates
Modificationof IEEE
802.11ad
5G mmWave cellular
DedicatedmmWave
V2XRequires special infrastructure
*Federal Communications Commission (FCC), “FCC 15-138,” 2015
Uses cellular infrastructureAccess is highly coordinatedLeverages (coming*) mmWave spectrum
Less efficient accessUse of unlicensed band
Use new dedicated spectrum
Slides © Robert W. Heath Jr. (2016)
23
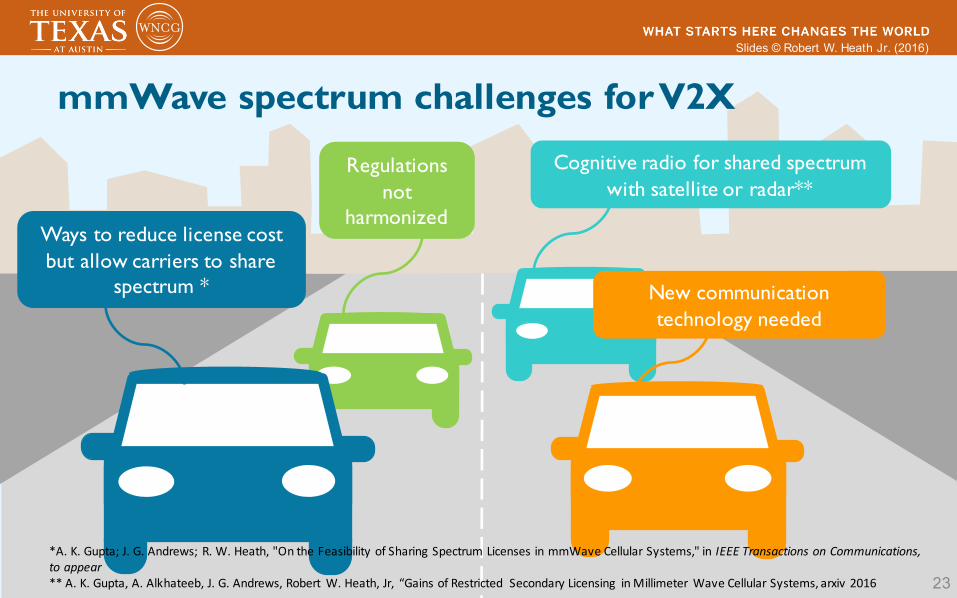
mmWave spectrum challenges forV2X
Cognitive radio for shared spectrum with satellite or radar**
Regulations not
harmonizedWays to reduce license cost but allow carriers to share
spectrum * New communication technology needed
*A.K.Gupta;J.G.Andrews;R.W.Heath,"OntheFeasibilityofSharingSpectrumLicensesinmmWaveCellularSystems,"in IEEETransactionsonCommunications,toappear**A.K.Gupta,A.Alkhateeb,J.G.Andrews,RobertW.Heath,Jr, “Gains ofRestricted Secondary Licensing inMillimeter WaveCellular Systems,arxiv 2016

Slides © Robert W. Heath Jr. (2016)
Designing a mmWave V2X system
24
Slides © Robert W. Heath Jr. (2016)
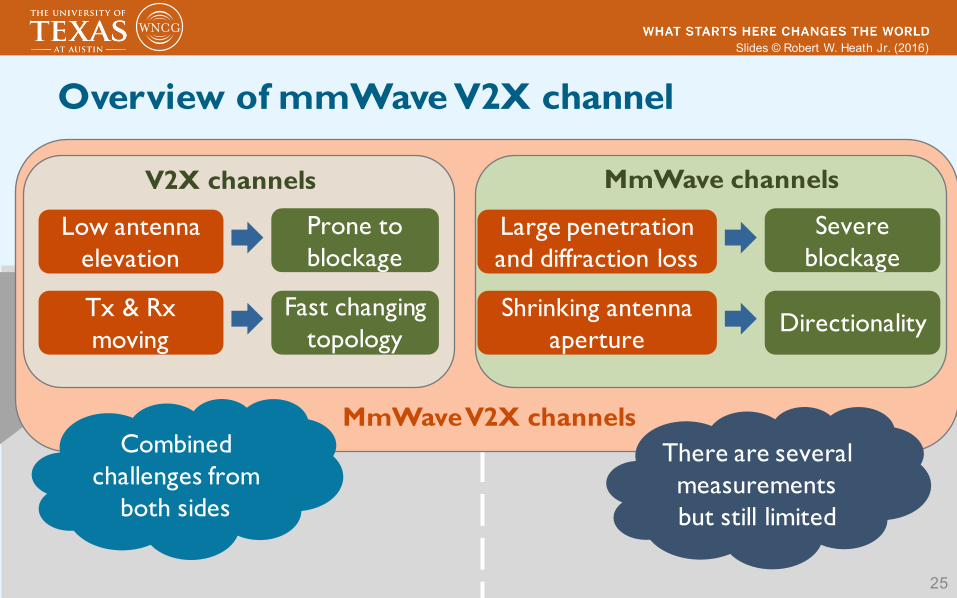
Overview of mmWave V2X channel
25
Low antenna elevation
Prone to blockage
Tx & Rx moving
Fast changing topology
Large penetration and diffraction loss
Severe blockage
Shrinking antenna aperture
Directionality
V2X channels MmWave channels
MmWaveV2X channelsCombined
challenges from both sides
There are several measurements but still limited

Slides © Robert W. Heath Jr. (2016)
Channel coherence time and directional reception
26
Mathematical expression relating coherence time
and beamwidthMathematical expression
relating coherence time and beamwidth
Long term beamformingcan be used
*V. Va, J. Choi, and R. W. Heath Jr. The impact of beamwidth on temporal channel variation in vehicular channels and its implications. Submitted to IEEE Trans VT
Overheads of beam training are much less significant than expected
Beams should be narrow but not too “pointy”
Optimum beamwidthis a tradeoff between
pointing error and Doppler

Slides © Robert W. Heath Jr. (2016)
Efficient beam alignment leveraging position info
27Junil Choi, Vutha Va, Nuria González-Prelcic, Robert Daniels, Chandra R. Bhat, and Robert W. Heath Jr, “Millimeter Wave Vehicular Communication to Support Massive Sensing”, to appear IEEE Commun. Mag., 2016.
DSRC modules or automotive sensors can be used to reduce overhead
Even with poor accuracy of position information the beam alignment overhead is reduced

Slides © Robert W. Heath Jr. (2016)
Multipath fingerprint for V2I beam alignment
28
Reflection off building could be used in NLOS
Such paths via static objects can be learned
beforehand
Location Path RxPower AoA AoD
1 #1 -59.81 84 87
#2 -67.66 80 61
… … … …
2 #1 -60.9 82 87
… … … …
Example of multipath fingerprint
Junil Choi et al., “Millimeter Wave Vehicular Communication to Support Massive Automotive Sensing”, to appear in IEEE Commun. Mag., 2016
blocked
Infra collect database of multipath fingerprint(i.e. AoA/AoD) of paths indexed by location
1. Rx request link via DSRC and inform its position
2. RSU responses with list of beam indices for training
3. Perform beam training

Slides © Robert W. Heath Jr. (2016)
29
Multiuser hybrid precoding: application to V2I
29*A. Alkhateeb, G. Leus, and R. W. Heath Jr, “Limited feedback hybrid precoding for multi-user millimeter wave systems,” IEEE Transactions on Wireless Communications, vol.14, no.11, pp.6481-6494, Nov. 2015
Multi-user interference management
SU analog beamforming design for max. desired
power
Two-stage multi-user hybrid precoding algorithm
L=3 paths, effective channels are quantized with BBB bits
Analog combining in the cars
Hybrid precoding at the infrastructure
Performance with quantized effective channels

Slides © Robert W. Heath Jr. (2016)
30
Radar-aided millimeter wave V2XRadar can be used to configure
communication link more efficiently
Radar can be used to design
multiuser beamforming
* N. González-Prelcic, Roi Mendez-Rial, and R. W. Heath Jr., ”Radar aided beamforming in mmWave V2I communications supporting antenna diversity," Proc. of ITA 2016 .
0.5
1
30
210
60
240
90
270
120
300
150
330
180 0
Azimut
Rela
tive P
ath
Gain
Com Signal at 65 GHz
Radar Signal at 76.5 Ghz
0.5
1
30
210
60
240
90
270
120
300
150
330
180 0
Elevation
Com Signal at 65 GHz
Radar Signal at 76.5 Ghz The dominant DoAs for the communication signal also appear at the radar echo in a different band
Algorithms for hybrid precoder& combiner design based on covarianceinformation of the radar signal

Slides © Robert W. Heath Jr. (2016)
31
Translating spatial correlation information
MmWave has higher spatial resolution (antennas)
and temporal resolution (bandwidth)
SIMO operating at two bands
* A. Ali, N. González-Prelcic and R. W. Heath Jr., ” Estimating Millimeter Wave Channels Using Out-of-Band Measurements,” Proc. of ITA 2016
hH
hL
NH > NL
Construct an estimate of the high frequency
spatial correlation matrix
⇥s1 s2 . . . sNtr
⇤(1)
⇥y1 y2 . . . yNtr
⇤=
2
6664
h1h2...
hNr
3
7775⇥s1 s2 . . . sNtr
⇤+ noise (2)
RL = E [hLh⇤L] (3)
ˆRH = f(RL) (4)
1
Compute low frequency spatial
correlation matrix
⇥s1 s2 . . . sNtr
⇤(1)
⇥y1 y2 . . . yNtr
⇤=
2
6664
h1h2...
hNr
3
7775⇥s1 s2 . . . sNtr
⇤+ noise (2)
RH = E [hHh⇤H] (3)
RL = E [hLh⇤L] (4)
1
True angle spread of high frequency
Correlationdistance

Slides © Robert W. Heath Jr. (2016)
32
Joint mmWave comm. and radar using IEEE 802.11ad
* P. Kumari, N. González Prelcic, and R. W. Heath, Jr., “ Investigating the IEEE 802.11ad Standard for Millimeter Wave Automotive Radar ,” Proc. of the Vehicular Technology Conference, Boston, USA, September 6-9, 2015
Joint system provides safety capabilities at lower cost
Special structure of preamble enables good ranging performance
Existing WLAN RX algorithms for
radar parameter estimation fine range estimation
achieves the desired accuracy of 0.01m
Slides © Robert W. Heath Jr. (2016)
33
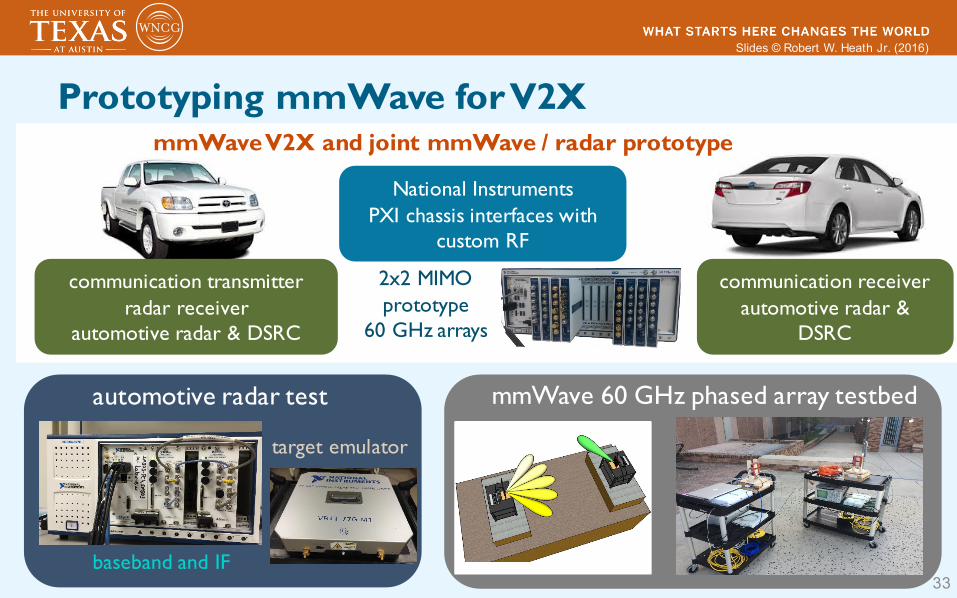
Prototyping mmWave forV2X
National InstrumentsPXI chassis interfaces with
custom RF
communication transmitter radar receiver
automotive radar & DSRC
communication receiverautomotive radar &
DSRC
mmWaveV2X and joint mmWave / radar prototype
automotive radar test
target emulator
baseband and IF
2x2 MIMOprototype
60 GHz arrays
mmWave 60 GHz phased array testbed

Slides © Robert W. Heath Jr. (2016)
34
Research challenges for PHY design
Effect of hardware impairments on mmWave V2X
Fast beam alignment and tracking
MIMO architectures for mmWave V2X: analog or hybrid?
Diversity solutions againstblockage
Slides © Robert W. Heath Jr. (2016)
Conclusion
35

Slides © Robert W. Heath Jr. (2016)
© Robert W. Heath Jr. 36
Vision of cellular infrastructure supporting transportation
Sensing at the infrastructure
Combination of sensing, learning and
communication
mmWave relay
mmWavesensing-BS
mutiband BSMultiband-connectivity
supportingV2X
radarbeam
Vehicles exchangingsensor data