utomotive enter case study i heavy duty truck...
TRANSCRIPT
AUTOMOTIVE RESEARCH CENTER
M916 - CASE STUDYarc
1
Case Study ICase Study IHeavy Duty Truck M916A1/M870A2Heavy Duty Truck M916A1/M870A2
Jeff Stein
Dennis Assanis
ARC ConferenceJune 3 & 4, 1997
Ann Arbor, Michigan
AUTOMOTIVE RESEARCH CENTER
M916 - CASE STUDYarc
2
ObjectivesObjectives
• To develop 1st generation models and simulation tools for a complete vehicle:
- Powertrain and Vehicle Dynamics for vehicle mobility simulation
• To demonstrate for the M916 truck:- Proper handling models- Steering/braking for rollover
- Truck acceleration on flat road - Traction while hill climbing
AUTOMOTIVE RESEARCH CENTER
M916 - CASE STUDYarc
3
Why Select the M916 Tractor Semitrailer Why Select the M916 Tractor Semitrailer as an Exemplar?as an Exemplar?
• Represents an important class of “real-world” vehicle modeling issues
• The DDC Series 60 engine has been extensively simulated and tested at the University of Michigan
• Trailer parameters have been previously measured at UMTRI and other vehicle parameters were available

AUTOMOTIVE RESEARCH CENTER
M916 - CASE STUDYarc
4
ChallengesChallenges
• Test new methodologies with large, “real-world” models
• Integrate multiple ARC research projects
• Integrate Matlab-based Powertrain models with large nonlinear Vehicle Dynamics models
• Produce source code for equations of motion

AUTOMOTIVE RESEARCH CENTER
M916 - CASE STUDYarc
5
Software EnvironmentsSoftware Environments• ArcSim: Vehicle Dynamics
• PowerSim: Powertrain & Vehicle Dynamics
AUTOMOTIVE RESEARCH CENTER
M916 - CASE STUDYarc
6
ArcSim: FeaturesArcSim: Features
• A user friendly and flexible Vehicle Dynamics simulation and animation environment
• Software architecture based on commercial TruckSim software
• Source code for models generated with commercial AutoSim software
• Available on the WEB:- http://arc.engin.umich.edu/arc/research/T1.html

AUTOMOTIVE RESEARCH CENTER
M916 - CASE STUDYarc
7
ArcSim User Interface: Top-LevelArcSim User Interface: Top-Level
Start Screen
Runs Screen:Simulation Setup
Animator
Inputs Vehicle Data Sets Simulation Codes(models)
X-Y Plotter
Post-Processing Programs

AUTOMOTIVE RESEARCH CENTER
M916 - CASE STUDYarc
8
ArcSim User Interface: Vehicle Data SetsArcSim User Interface: Vehicle Data SetsVehicle Data Sets
Tractor
Steering SystemSuspension Tire Data Sets
Trailer

AUTOMOTIVE RESEARCH CENTER
M916 - CASE STUDYarc
9
ArcSim User Interface: Tire Data SetsArcSim User Interface: Tire Data Sets
Tire Data Sets
Longitudinal Force (Fx) Data
Lateral Force(Fy) Data
Aligning Moment (Mz) Data
AUTOMOTIVE RESEARCH CENTER
M916 - CASE STUDYarc
10
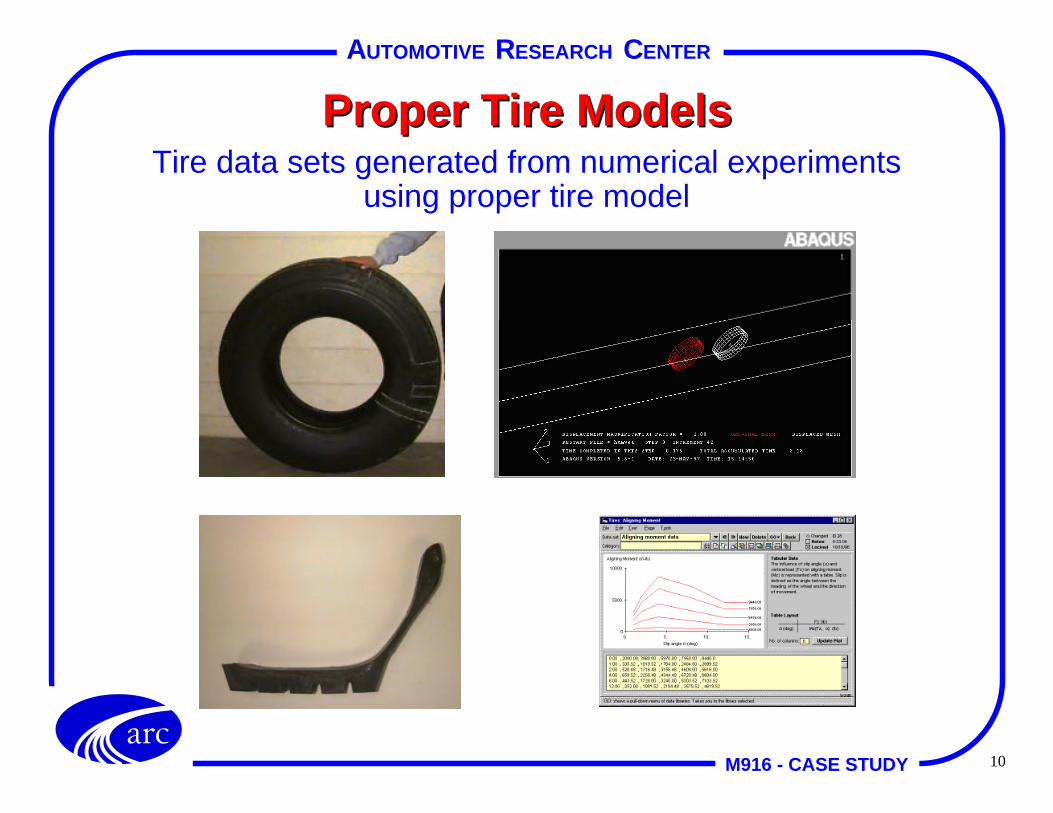
Proper Tire ModelsProper Tire ModelsTire data sets generated from numerical experiments
using proper tire model

AUTOMOTIVE RESEARCH CENTER
M916 - CASE STUDYarc
11
PowerSim: FeaturesPowerSim: Features
• A flexible Powertrain and Vehicle Dynamics simulation
• Matlab-Simulink based simulation environment developed by the University of Wisconsin team:
- Hierarchical- Interactive- Choice of sub-models
- Easily reconfigurable
• High fidelity, transient diesel engine model developed and validated by the University of Michigan team
• Diesel engine simulation available on the WEB:- http://arc.engin.umich.edu/esim-docs/esim.html

AUTOMOTIVE RESEARCH CENTER
M916 - CASE STUDYarc
12
ArcSim - PowerSim IntegrationArcSim - PowerSim IntegrationPowerSim
Vehicle Dynamics &DriveTrain Block
AnimatorX-Y Plotter
Post-Processing ProgramsC-Mex code for vehicle
dynamics models
ArcSim
AUTOMOTIVE RESEARCH CENTER
M916 - CASE STUDYarc
13
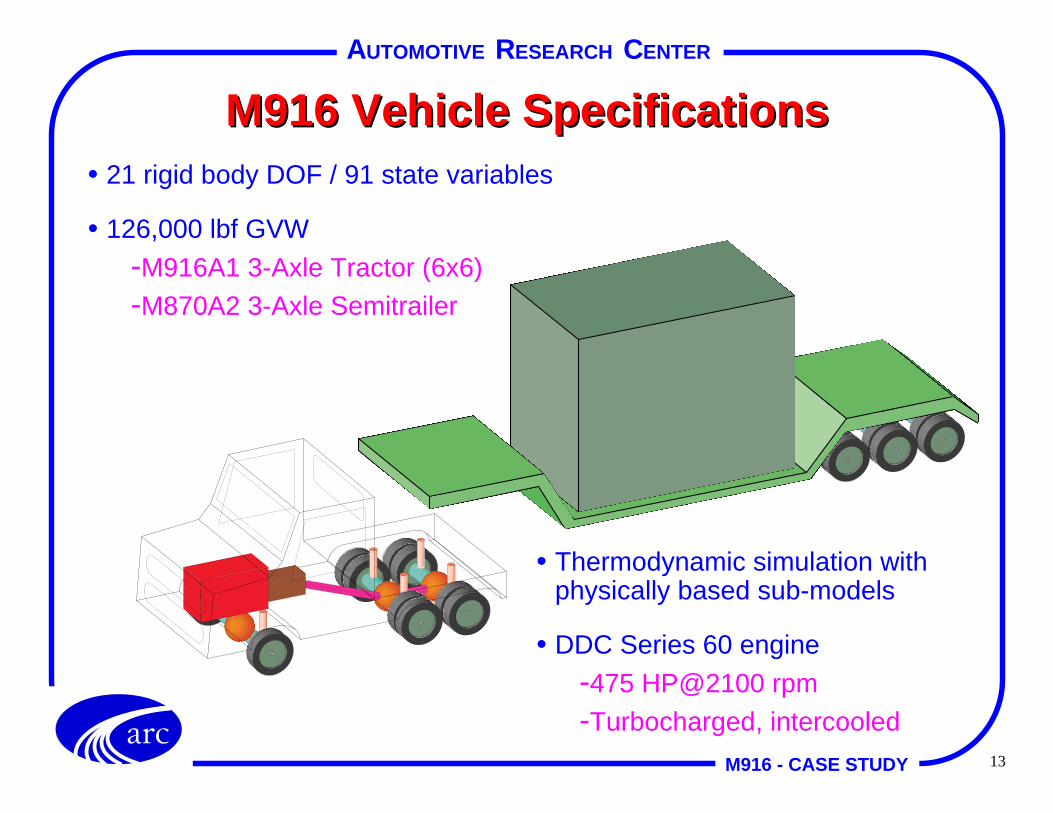
M916 Vehicle SpecificationsM916 Vehicle Specifications• 21 rigid body DOF / 91 state variables
• 126,000 lbf GVW
-M916A1 3-Axle Tractor (6x6)-M870A2 3-Axle Semitrailer
• Thermodynamic simulation with physically based sub-models
• DDC Series 60 engine
-475 HP@2100 rpm-Turbocharged, intercooled

AUTOMOTIVE RESEARCH CENTER
M916 - CASE STUDYarc
14
M916 Model CharacteristicsM916 Model Characteristics• 21 rigid body DOF / 91 state variables
- Tractor: 6 DOF- Trailer: 3 DOF (Rotational)
- Axles: 2 DOF (Roll and Jounce)- Wheels: 1 DOF (Spin)- 25 auxiliary states
• Computational load- 6600 multiplies/divides, 6000 add/subtracts per evaluation
of state derivatives
- Runs at about 3.5 sec computation time per sec of simulated motion on a 120 MHz Pentium
• Parameters obtained by measurement or estimation
• Modeling assumptions verified

AUTOMOTIVE RESEARCH CENTER
M916 - CASE STUDYarc
15
M916 Example ApplicationsM916 Example Applications
I. Proper handling models
II. Steering/braking for rollover
III. Truck acceleration on flat road
IV. Traction while hill climbing

AUTOMOTIVE RESEARCH CENTER
M916 - CASE STUDYarc
16
Example Application IExample Application IProper Handling Models
Runs Screen
Programs Based on Different Equaton Formulations
Programs Based on Different Complexity Models

AUTOMOTIVE RESEARCH CENTER
M916 - CASE STUDYarc
17
Element ImportanceElement Importance
HighHigh
LowLow
Idea: Use power-based metric to rank the importance of components and eliminate low-importance components

AUTOMOTIVE RESEARCH CENTER
M916 - CASE STUDYarc
18
Handling Performance PredictionsHandling Performance PredictionsFull Model vs. Reduced ModelFull Model vs. Reduced Model
0 1 2 3 4 5 6 7 8 9 10-0.2
-0.1
0
0.1
0.2
Time [sec]
0 1 2 3 4 5 6 7 8 9 10-5
0
5
Time [sec]
FullReduced: 30% of elements removed
Tractor Lateral Acceleration [g’s]
Tractor Yaw Rate [deg/s]

AUTOMOTIVE RESEARCH CENTER
M916 - CASE STUDYarc
19
Example Application IIExample Application IISteering/Braking for Rollover
Start Screen
Runs Screen:Simulation Setup
Animator
Inputs Vehicle Data Sets Simulation Codes(models)
X-Y Plotter
Post-Processing Programs

AUTOMOTIVE RESEARCH CENTER
M916 - CASE STUDYarc
20
UMTRI “Drastic” ManeuverUMTRI “Drastic” ManeuverBrake pressure is switched on and off when roll rate is zero
0 1 2 3 4 50
50
100
Time [sec]
0 1 2 3 4 5
0
10
20
Time [sec]
0 1 2 3 4 5-1012
Time [sec]
Steering wheel angle [deg]
Brake pressure [psi]
Trailer roll angle [deg]

AUTOMOTIVE RESEARCH CENTER
M916 - CASE STUDYarc
21
Worst-Case Steering/Braking Worst-Case Steering/Braking Conditions for Inducement RolloverConditions for Inducement Rollover
Idea: To use optimal control/zero sum game theory, to systematically identify worst case input conditions and compare to conventionally chosen “drastic” inputs
0 5
-100
-50
0
50
100
Time [sec]0 5
-5
0
5
10
15
20
25
Time [sec]0 5
0
10
20
30
40
50
60
70
80
90
Time [sec]
Steering wheel angle [deg] Brake pressure [psi] Trailer roll angle [deg]
worst-case
drastic

AUTOMOTIVE RESEARCH CENTER
M916 - CASE STUDYarc
22
Mobility StudiesMobility Studies
PowerSim
MULTI-CYLINDERDIESEL ENGINE
EXHAUSTMANIFOLD
INTAKEMANIFOLD
INTER-COOLER
COMPRESSOR TURBINE
WA
ST
EG
AT
E
FUELSYSTEM
Air
FuelExhaustgas
W.
Diesel EngineSystem
Driveline
Vehicle Dynamics
AA
AAAAAAAAAAAAAAAA
AAAA
AAAAAAAAAAAAAAAAAAAAAAAA
AAAAAAAAAAAA
AAAAAAAAAAAAAAA
AAAAAAAAA
AAAAAAAA
AAAAAAAAAAAA
AAAAAA
AAAAAAAAA
T C
Trns
D-FR
D-R
IA-D Tr-C
D-F
Point Mass
126,000 lbf GVW

AUTOMOTIVE RESEARCH CENTER
M916 - CASE STUDYarc
23
Flexible Powertrain Simulation developed in SIMULINK by the University of Wisconsin team:
- Hierarchical- Interactive- Choice of Sub-models- Easily Reconfigurable
TC Diesel Engine System SimulationTC Diesel Engine System Simulation
IC
TC
Engine Inmnfld
Exmnfld
Cylinders
The in-cylinder model: UM - UW - WSU

AUTOMOTIVE RESEARCH CENTER
M916 - CASE STUDYarc
24
Advanced Propulsion System SimulationAdvanced Propulsion System Simulation
ENGINEVIBRATION
TURBOCHARGED DIESEL ENGINE SYSTEM
FUEL &COMBUSTION
ENGINEFRICTION
HEATTRANSFER
TRANSIENTCOLD START
IN-CYLINDERDIESELENGINEMODEL
EXTERNAL SUB-
SYSTEMS
INT
EG
RA
TIO
N W
ITH
TH
E V
EH
ICLE
SIM
ULA
TIO
N
DRIVE-TRAIN
AUTOMOTIVE RESEARCH CENTER
M916 - CASE STUDYarc
25
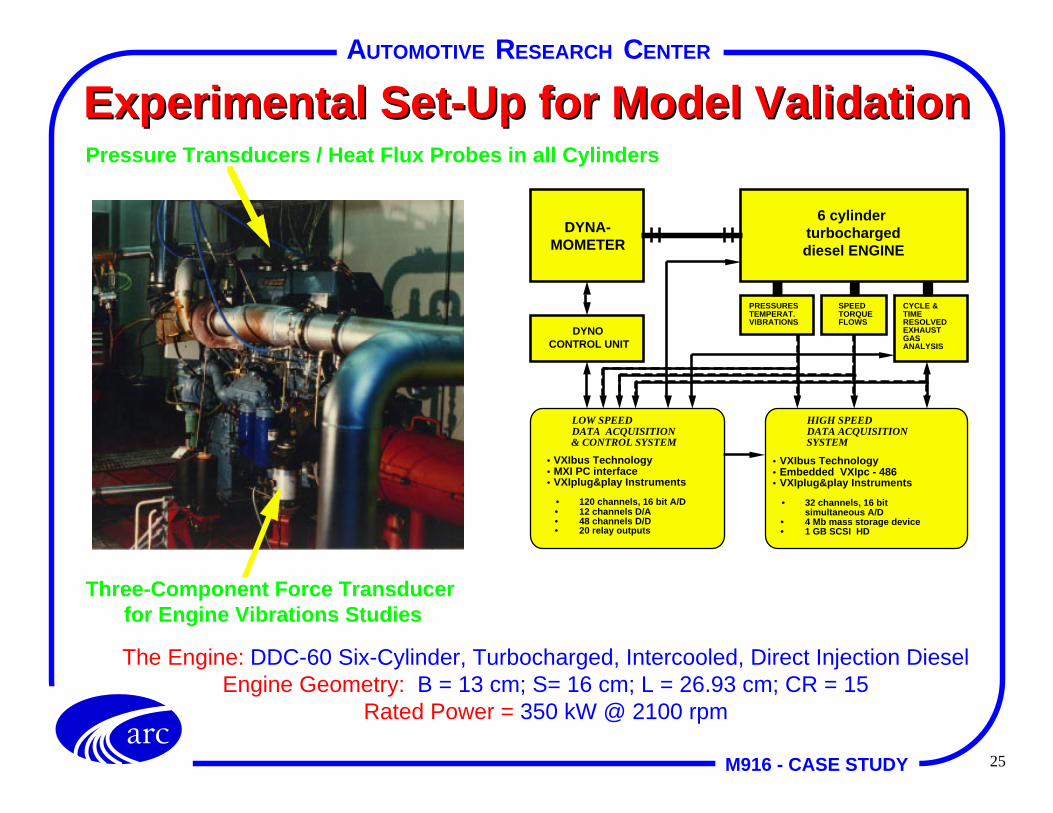
Experimental Set-Up for Model ValidationExperimental Set-Up for Model Validation
The Engine: DDC-60 Six-Cylinder, Turbocharged, Intercooled, Direct Injection Diesel Engine Geometry: B = 13 cm; S= 16 cm; L = 26.93 cm; CR = 15
Rated Power = 350 kW @ 2100 rpm
DYNA-MOMETER
6 cylinder turbochargeddiesel ENGINE
LOW SPEEDDATA ACQUISITION& CONTROL SYSTEM
HIGH SPEEDDATA ACQUISITION SYSTEM
PRESSURESTEMPERAT.VIBRATIONS
SPEEDTORQUEFLOWS
CYCLE &TIME RESOLVED EXHAUSTGASANALYSIS
• VXIbus Technology• MXI PC interface• VXIplug&play Instruments
• 120 channels, 16 bit A/D • 12 channels D/A • 48 channels D/D • 20 relay outputs
• VXIbus Technology• Embedded VXIpc - 486• VXIplug&play Instruments
• 32 channels, 16 bit simultaneous A/D
• 4 Mb mass storage device • 1 GB SCSI HD
DYNO CONTROL UNIT
Three-Component Force Transducer for Engine Vibrations Studies
Pressure Transducers / Heat Flux Probes in all Cylinders

AUTOMOTIVE RESEARCH CENTER
M916 - CASE STUDYarc
26
Calibration and Validation of Sub-ModelsCalibration and Validation of Sub-Models
Same set of calibrated constants used for all other
operating points
0
20
40
60
80
100
120
320 340 360 380 400 420
experimentsimulation
CYLIN
DER
PRESSURE
(bar)
CRANK ANGLE (deg)
1200 rpm50% load
0
50
100
150
320 340 360 380 400 420
experimentsimulation
CYLIN
DER
PRESSURE
(bar)
CRANK ANGLE (deg)
2100 rpm100% load
Model constants calibrated to produce best agreement
between measured and predicted pressure traces
CALIBRATEDPOINT
RATED SPEED,FULL LOAD

AUTOMOTIVE RESEARCH CENTER
M916 - CASE STUDYarc
27
Transient Engine Model ValidationTransient Engine Model Validation
A sequence of elementary transients defined in order to validate predictions of the multi-cylinder engine response against experimental
measurements under carefully-controlled test-cell conditions.
0
500
1000
1500
2000
2500
50
100
150
200
250
300
350
400
450
0 5 10 15 20 25 30
Engine
Speed
(rpm
);
External
Load
(N
m)
Intake
Manifold
Pressure
(KPa)
Time (s)
ENGINE SPEED - PREDICTED
ENGINE SPEED - MEASURED
EXTERNAL
LOAD
BOOST
PRESSURE

AUTOMOTIVE RESEARCH CENTER
M916 - CASE STUDYarc
28
Study the Effect of Turbocharger Inertia on Engine Response and Vehicle Acceleration
Example Application IIIExample Application IIITruck Acceleration on Flat Road
•Start at 10 mph•100% driver demand
126,000 lbf GVW
AUTOMOTIVE RESEARCH CENTER
M916 - CASE STUDYarc
29
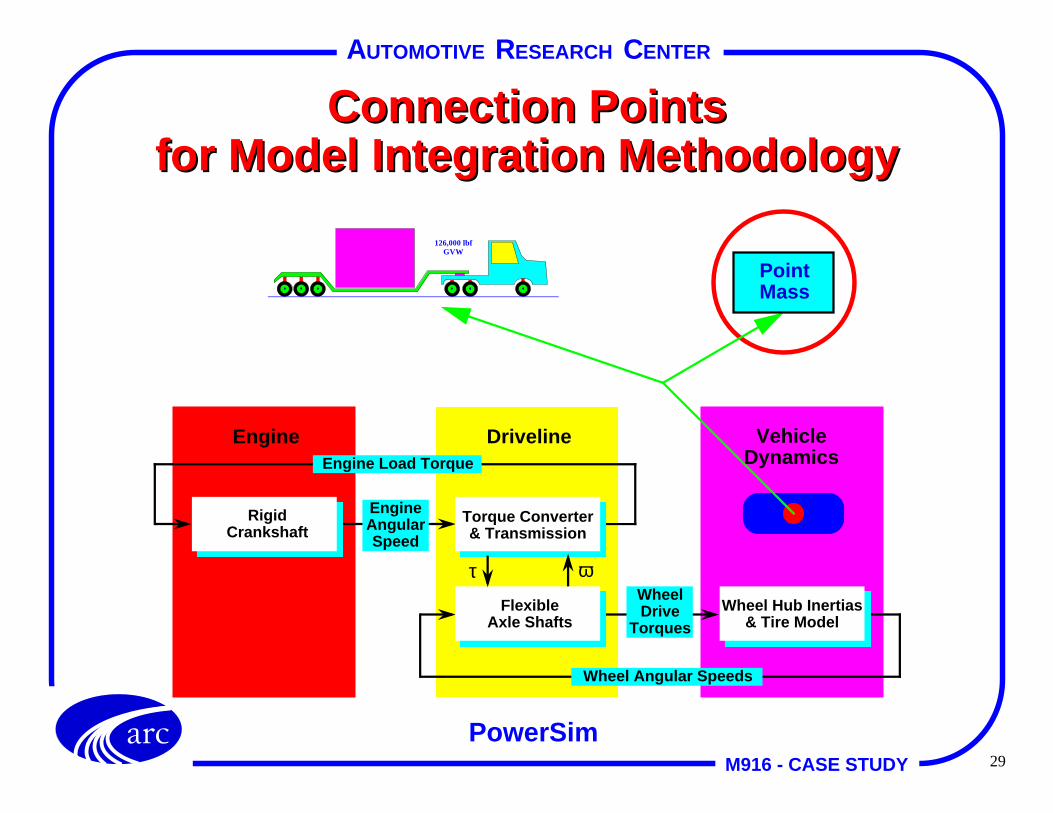
Connection PointsConnection Pointsfor Model Integration Methodologyfor Model Integration Methodology
Engine Driveline VehicleDynamics
Wheel Angular Speeds
Engine Load Torque
Engine Angular Speed
Wheel Drive
Torques
RigidCrankshaft
FlexibleAxle Shafts
Torque Converter & Transmission
Wheel Hub Inertias & Tire Model
ωτ
Point Mass
PowerSim
126,000 lbf GVW

AUTOMOTIVE RESEARCH CENTER
M916 - CASE STUDYarc
30
Performance ComparisonPerformance Comparison
ITC LI = 0.5 ITC HI
1200
1300
1400
1500
1600
1700
1800
1900
0 2 4 6 8 10
ENGINE
SPEED
(rpm)
M916A1 SEMIGross Curb Weight 126,000 lbFirst Gear Low Inertia TC
High
Inertia TC
10
12
14
16
18
20
22
24
26
28
0 2 4 6 8 10
TRUCK
SPEED
(mph)
M916A1 SEMIGross Curb Weight 126,000 lbFirst Gear
Low Inertia TC
High Inertia TC
TIME (s)
TURBOLAG
TURBOLAG
AUTOMOTIVE RESEARCH CENTER
M916 - CASE STUDYarc
31
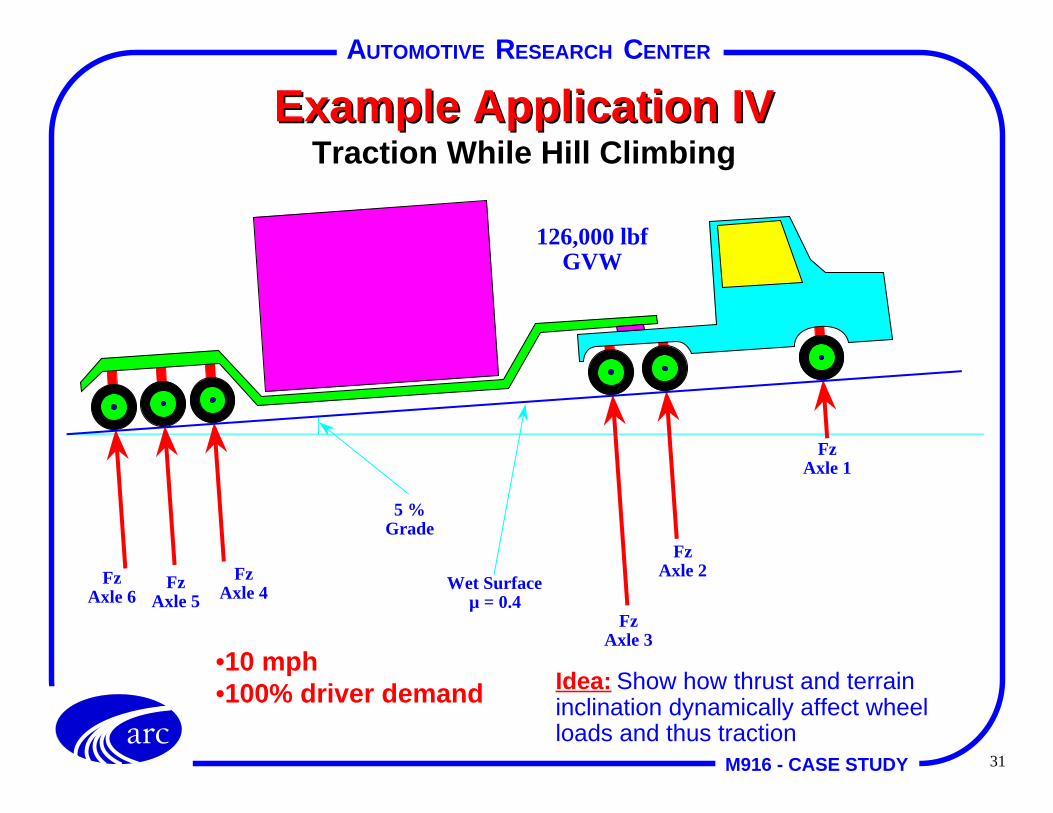
Idea: Show how thrust and terrain inclination dynamically affect wheel loads and thus traction
Example Application IVExample Application IVTraction While Hill Climbing
•10 mph•100% driver demand
126,000 lbf GVW
Wet Surfaceµ = 0.4
5 %Grade
FzAxle 4
FzAxle 5
FzAxle 6
FzAxle 3
FzAxle 2
FzAxle 1
AUTOMOTIVE RESEARCH CENTER
M916 - CASE STUDYarc
32
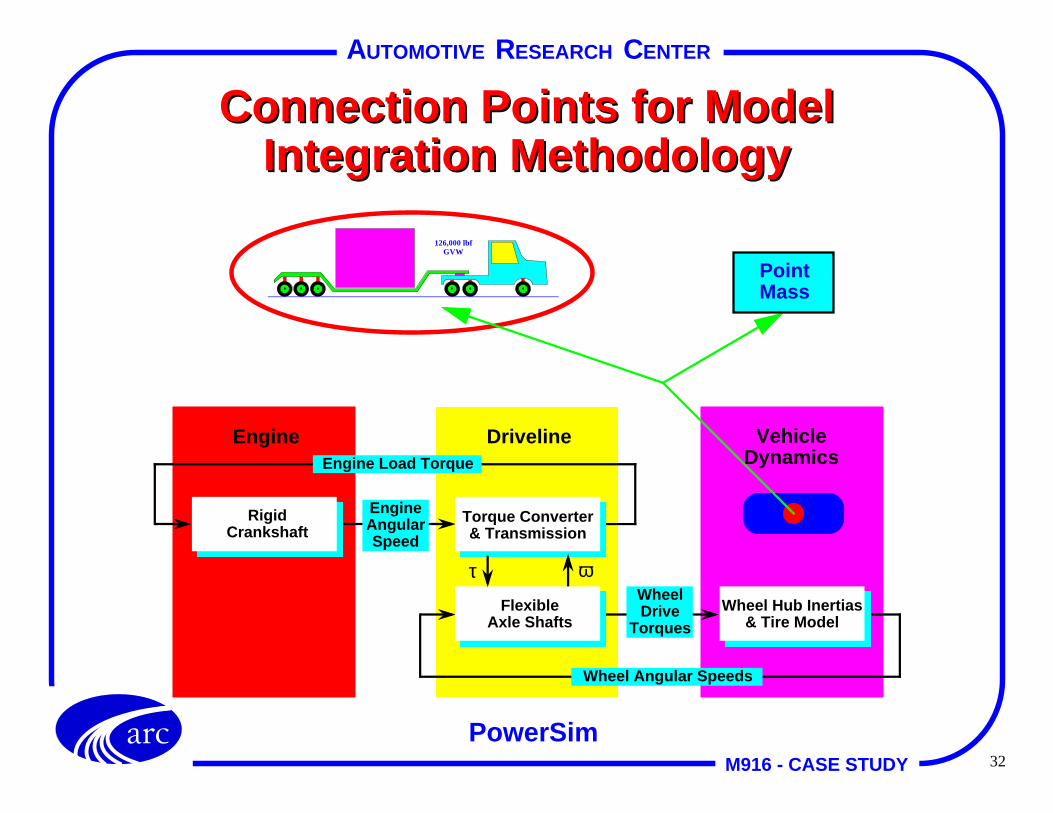
Connection Points for Model Connection Points for Model Integration MethodologyIntegration Methodology
Engine Driveline VehicleDynamics
Wheel Angular Speeds
Engine Load Torque
Engine Angular Speed
Wheel Drive
Torques
RigidCrankshaft
FlexibleAxle Shafts
Torque Converter & Transmission
Wheel Hub Inertias & Tire Model
ωτ
Point Mass
PowerSim
126,000 lbf GVW

AUTOMOTIVE RESEARCH CENTER
M916 - CASE STUDYarc
33
Vehicle Dynamic ModelsVehicle Dynamic Models
• 1-D point mass
• Constant vertical tire loads
• Tire Fx independent of Fz
• Constant road slope
• Simple rolling resistance model
• Simple aero drag model
• 21 Rigid Body DOF
• Full nonlinear kinematics
• Comprehensive tire model
• Hysteretic suspension springs
• Comprehensive steering model
• Simple braking model
• Constant road slope
• Simple rolling resistance model
• Simple aero drag model
• Bottom Line: The interaction of pitch and handling dynamics with the engine and Powertrain can be studied.
Point-mass model Multi-body model

AUTOMOTIVE RESEARCH CENTER
M916 - CASE STUDYarc
34
Hill Climbing: ResultsHill Climbing: Results
VEHICLE SPEED [mph]
VEHICLEACCELERATION [g's]
TIME [sec]
8
10
12
14
16
18
20
22
-0.1
-0.05
0
0.05
0.1
0.15
0 2 4 6 8 10
M916A1 SEMI, Gross Curb Weight 126,000 lb
ax
vx

AUTOMOTIVE RESEARCH CENTER
M916 - CASE STUDYarc
35
Hill Climbing: Results - cont.Hill Climbing: Results - cont.
WHEEL VERTICAL LOAD [lb*1000]
TIME [sec]
5
10
15
0 2 4 6 8 10
M916A1 SEMIGross Curb Weight 126,000 lb
FRONT
FRONT REAR
REAR
AUTOMOTIVE RESEARCH CENTER
M916 - CASE STUDYarc
36
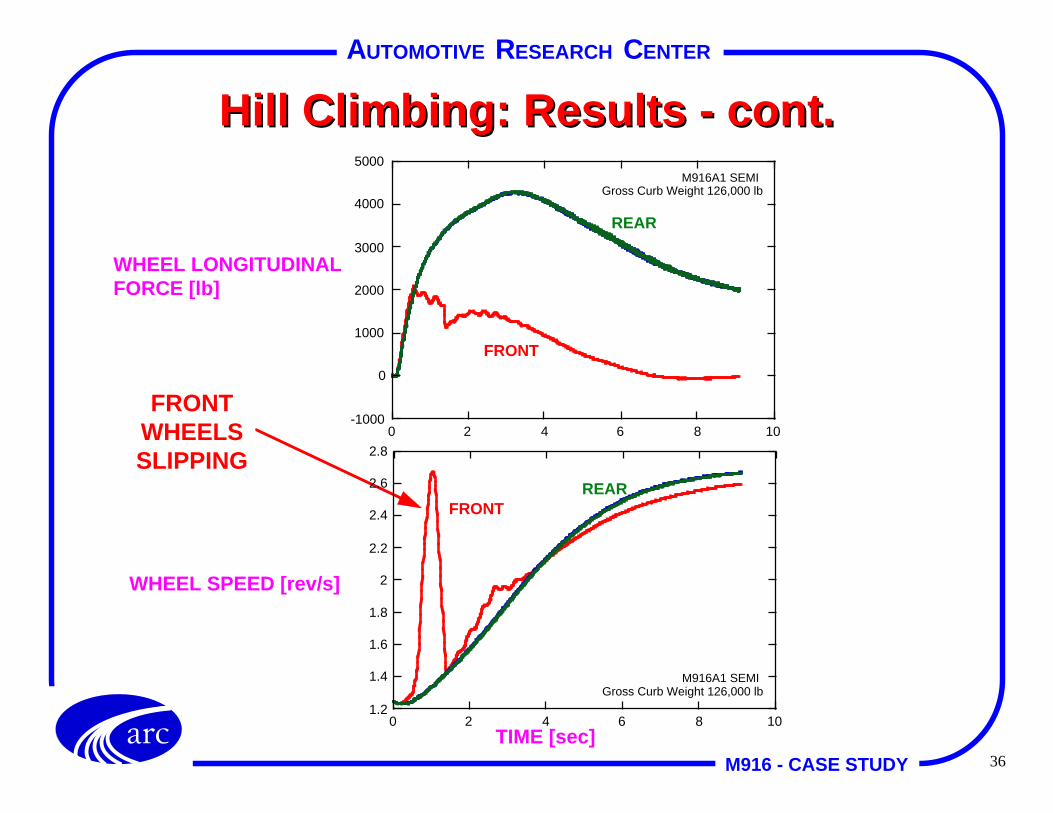
Hill Climbing: Results - cont. Hill Climbing: Results - cont.
FRONT WHEELS SLIPPING
-1000
0
1000
2000
3000
4000
5000
0 2 4 6 8 10
M916A1 SEMIGross Curb Weight 126,000 lb
FRONT
REAR
WHEEL LONGITUDINAL FORCE [lb]
1.2
1.4
1.6
1.8
2
2.2
2.4
2.6
2.8
0 2 4 6 8 10
M916A1 SEMIGross Curb Weight 126,000 lb
FRONTREAR
TIME [sec]
WHEEL SPEED [rev/s]

AUTOMOTIVE RESEARCH CENTER
M916 - CASE STUDYarc
37
SummarySummary
• Demonstration 1st generation models and simulation tools of a complete vehicle:
- Powertrain- Vehicle Dynamics
• ArcSim and PowerSim:- User friendly and flexible Vehicle Dynamics and Powertrain
simulation and animation environments
• Demonstrated with the M916 truck:- Handling (multiple models)
- Rollover (limit maneuvers)- Mobility studies
AUTOMOTIVE RESEARCH CENTER
M916 - CASE STUDYarc
38
Future DirectionsFuture Directions
• Vehicle- Survivability: Battle field performance- Drivability: Handling and acceleration
- Mobility: Dynamic and wheel traction- Efficiency: Terrain roughness and fuel economy- Safety: Limiting maneuvers
• Model refinement and validation