using belief propagation to counter correlated reports...
TRANSCRIPT

Using Belief Propagation to Counter
Correlated Reports in Cooperative
Spectrum Sensing
Mihir Laghate and Danijela Cabric11th December 2014
D. Markovic / Slide 2
Outline
Motivation & Prior Work
Bayesian Network Model
Identifying Source of Correlation
Spectrum Sensing Using Loopy Belief Propagation
Conclusions
2

D. Markovic / Slide 3
Correlated Reports in Spectrum Sensing
Cooperation utilizes diversity in fading channels to improve sensing
Correlations in reports caused by:
Correlated fading channels
Common interferers
Colluding users
Correlation reduces sensing accuracy!
3
PrimaryUser
Secondary Users
Fusion Center
Reports( )s t
( )ku t
( )ky t
Our goals:
Define mathematical model describing both phenomena
Identify sets of users who are correlated
Identify source of correlation
Sense spectrum occupancy by loopy belief propagation
Sensing results
( ), ( ) {0,( }, 1)k ks t u t y t

D. Markovic / Slide 4
System Model
Channel from PU to SUs may have unknown correlations
SUs may be honest or malicious. If malicious,
– they can be independently malicious or colluding
– attack strategy is statistical and unknown
Binary random variables
4
1 1
2 2
( ) ( )
( ) ( )0
y t u t
y t u tP
Primary User
Secondary Users
Fusion Center
ReportsCollusion
Channel
Channel
CorrelatedChannels
( )s t
( )ku t ( )ky tSensing Results
( ), ( ) {0,( }, 1)k ks t u t y t
Statistical attacks:

D. Markovic / Slide 5
Prior Work: Correlated Channels
5
Primary User
Secondary Users
Fusion Center
Reports
Channel
Channel
Correlated Channels
( )s t
( )ku t ( )ky tSensing Results
Increased correlation limits sensing accuracy (Mishra et al. 2006)
Sensing when given locations of SUs and using (Gudmundson1991)’s model for correlations due to shadow fading:
– (Min et al. 2011) cluster SUs based on distance
– (Xue et al. 2014) weight reports according to correlation

D. Markovic / Slide 6
Prior Work: Collaborative Malicious SUs
6
Primary User
Secondary Users
Fusion Center
ReportsCollusion
Channel
Channel( )s t
( )ku t ( )ky tSensing Results
Collusion can increase false alarm and misdetection probability when majority rule is used (Yu et al. 2013)
(Rawat et al. 2011) sense spectrum by a M-out-of-N rule when colluding SUs attack by sending the same report
Channel
Channel

D. Markovic / Slide 7
Novelty of our Work
7
System
Relaxing Assumptions in System Information:
No location information of SUs
Channel correlation structure is unknown
Approach:
Single framework for two sources of correlation: fading channels and collusion
Model causal nature of system, i.e., conditional distributions of sensing results and attack strategies

D. Markovic / Slide 8
Outline
Motivation & Prior Work
Bayesian Network Model
Identifying Source of Correlation
Spectrum Sensing Using Loopy Belief Propagation
Conclusions
8

D. Markovic / Slide 9
Bayesian Network Model 1/2
9
System
Model causal nature of system, i.e., conditional distributions of sensing results and attack strategies
Bayesian Network
Model

D. Markovic / Slide 10
Bayesian Network Model 2/2
10
Factorization of joint distribution
MAP & ML estimators require learning this factorization
Learning factorization learning structure of model identifying sets of colluding SUs and
SUs with correlated channels
1 4 1 4
31 2 4
3 4 3 41 1 2 2
, ,..., , ,...,
|, | |
, | ,| |
P Ps u u y y s
P P u s Pu u s u s
P P P y y u uy u y u
Sensing Results
SU Reports

D. Markovic / Slide 11
Outline
Motivation & Prior Work
Bayesian Network Model
Identifying Source of Correlation
Spectrum Sensing Using Loopy Belief Propagation
Conclusions
11

D. Markovic / Slide 12
Learning Structure of Model
Existence of latent variables with 2 neighbors is not learnable:(Pearl 1988)
– Sensing results:
– Spatial correlation nodes:
12
1,2X
s
3X
4X
1u
2u
3u
4u 3,4
A
1y
2y
3y
4y
Ground Truth
Spatial Correlation
Sensing Result
Attack Strategy
SU Reports
1 2 3 4, , ,u u u u
3 4,X X
Observable Variables
Latent Variables

D. Markovic / Slide 13
Source of Correlation is Unidentifiable
Collusion indistinguishable from channel correlation!
13
s
1y
2y
3y
4y
Ground Truth
Correlations SU Reports
Learnable Structure
1,2X
1u 2u
3X
4X
3u
4u
3,4A

D. Markovic / Slide 14
Sets of Correlated SUs
We can identify sets of SUs with correlated reports
– Proposed method in paper based on principle of additive information distances on trees from (Choi et al 2011)
14
s
1y
2y
3y
4y
Ground Truth
Correlations SU Reports
Learnable Structure
1 1,2
2 3,4
Sets of Correlated SUs
1r
2r

D. Markovic / Slide 15
Sets of Correlated SUs
We can identify sets of SUs with correlated reports
– Proposed method in paper based on principle of additive information distances on trees from (Choi et al 2011)
For m-th set, is an unknown distribution which is required for spectrum sensing
15
s
1y
2y
3y
4y
Ground Truth
Correlations SU Reports
Learnable Structure
1 1,2
2 3,4
Sets of Correlated SUs
( ) | ( )mm
y t s tr P
1r
2r

D. Markovic / Slide 16
Outline
Motivation & Prior Work
Bayesian Network Model
Identifying Source of Correlation
Spectrum Sensing Using Loopy Belief Propagation
Conclusions
16

D. Markovic / Slide 17
Sensing by Loopy Belief Propagation
17
Iterative message passing algorithm to estimate posterior distributions of
and .
Inputs:
Reports for
Sets of correlated SUs Forms factor graph
Priors for spectrum occupancy and
Output:
Estimate of which gives:
( )s t {1,..., }( ) | ( )Ky t s tP
{1,..., }( )Ky t 1,...,t T
( )s t
( ) | ( )m m
y t s tP r
{1,..., }( ) | ( )Ks t y tP
{1,
0... }
,1,( ) | ( )ˆ( ) arg max K
s
s t y ts t P
m
(1)s
(2)s
1r
2r
3r
1,1
1
1y
3,1
3
1y
1,2
1
2y
2,2
2
2y
3,3
3
2y
2,1
2
1y
Set
Set
Set
Variable nodes
t =2
t =1
Factor nodes
1
2
3

D. Markovic / Slide 18
Priors for Loopy Belief Propagation
Prior for spectrum occupancy is uniform on {0, 1}
Assumes no knowledge of PU traffic
Prior for
Perfect honest SU would have
Prior defined as distance from the perfect honest SUFor example, for an independent SU:
18
( ) | ( )m m
y t s tP r
( )s t
1 if ( ) ( )
( ) | ( )0 otherwise
k
k
y t s tP y t s t
1l
1 1
1 (0,0) 0 (1,0)4
0 (0,1) 1 (1,)
)(
1kp r
r r
r rr
( ) 0s t ( ) 1s t

D. Markovic / Slide 19
Simulations
Proposed algorithm is compared with a “naïve” BP algorithm (Pennaet al. 2012) which assumes that all SUs are uncorrelated and may be malicious
System
Pairs of colluding SUs
Remaining uncorrelated SUs
Identical sensing statistics for individual SU:detection probability 0.95, false alarm probability 0.05.
19

D. Markovic / Slide 20
Simulations: Increasing # Uncorrelated SUs
20
System: 1 pair of colluding SUs, 9 message passing iterations
Probability of Detection Probability of False Alarm
Proposed algorithm is compared with a “naïve” BP algorithm (Penna et al. 2012)which assumes that all SUs are uncorrelated and may be malicious
Detection probability improved while false alarm probability unchanged
Gain in detection probability reduces with increasing no. of uncorrelated SUs

D. Markovic / Slide 21
Simulations: Increasing # Correlated Pairs
21
System: 8 SUs, T=12 time slots, 9 message passing iterations
Probability of Detection Probability of False Alarm
For all sensing algorithms, detection probability reduces and false alarm probability increases with increase in number of colluding pairs
Detection probability of proposed algorithm suffers less than naïve algorithm
False alarm probability is comparable to naïve algorithm

D. Markovic / Slide 22
Conclusions
Modeled channel correlations and colluding statistical attacks as a Bayesian network
Proved that identifying source of correlation in reports is not possible
Proposed loopy belief propagation algorithm to sense spectrum while learning the correlations in the SU reports
– Improved detection probability
– Gains increase with number of colluding pairs
22

D. Markovic / Slide 23
Selected References
23
(Mishra et al. 2006) S. M. Mishra, A. Sahai, and R. W. Brodersen, “Cooperative Sensing among Cognitive Radios,” in IEEE International Conference on Communications, 2006, vol. 4.(Gudmundson 1991) M. Gudmundson, “Correlation model for shadow fading in mobile radio systems,” Electronics Letters, vol. 27, no. 23, Nov. 1991.(Min et al. 2011) A. W. Min, K. G. Shin, and X. Hu, “Secure Cooperative Sensing in IEEE 802.22 WRANs Using Shadow Fading Correlation,” IEEE Trans. on Mobile Computing, Oct. 2011.(Xue et al. 2014) D. Xue, E. Ekici, and M. C. Vuran, “Cooperative Spectrum Sensing in Cognitive Radio Networks Using Multidimensional Correlations,”IEEE Transactions on Wireless Communications, vol. 13, no. 4, Apr. 2014.(Yu et al. 2013) C.-K. Yu, M. Laghate, A. H. Sayed, and D. Cabric, “On the effects of colluded statistical attacks in cooperative spectrum sensing,” in IEEE SPAWC, 2013.(Rawat et al. 2011) A. S. Rawat, P. Anand, H. Chen, and P. K. Varshney, “Collaborative Spectrum Sensing in the Presence of Byzantine Attacks in Cognitive Radio Networks,” IEEE Transactions on Signal Processing, vol. 59, no. 2, Feb. 2011.(Pearl 1988) J. Pearl, Probabilistic reasoning in intelligent systems: networks of plausible inference. San Francisco, CA, USA: Morgan Kaufmann Publishers Inc., 1988.(Choi et al. 2011) M. J. Choi, V. Y. F. Tan, A. Anandkumar, and A. S. Willsky, “Learning Latent Tree Graphical Models,” Journal of Machine Learning Research, vol. 12, Jul. 2011.(Penna et al. 2012) F. Penna, Y. Sun, L. Dolecek, and D. Cabric, “Detecting and Counteracting Statistical Attacks in Cooperative Spectrum Sensing,” IEEE Transactions on Signal Processing, vol. 60, no. 4, Apr. 2012.

Thank you!
Questions?

Backup Slides
D. Markovic / Slide 26
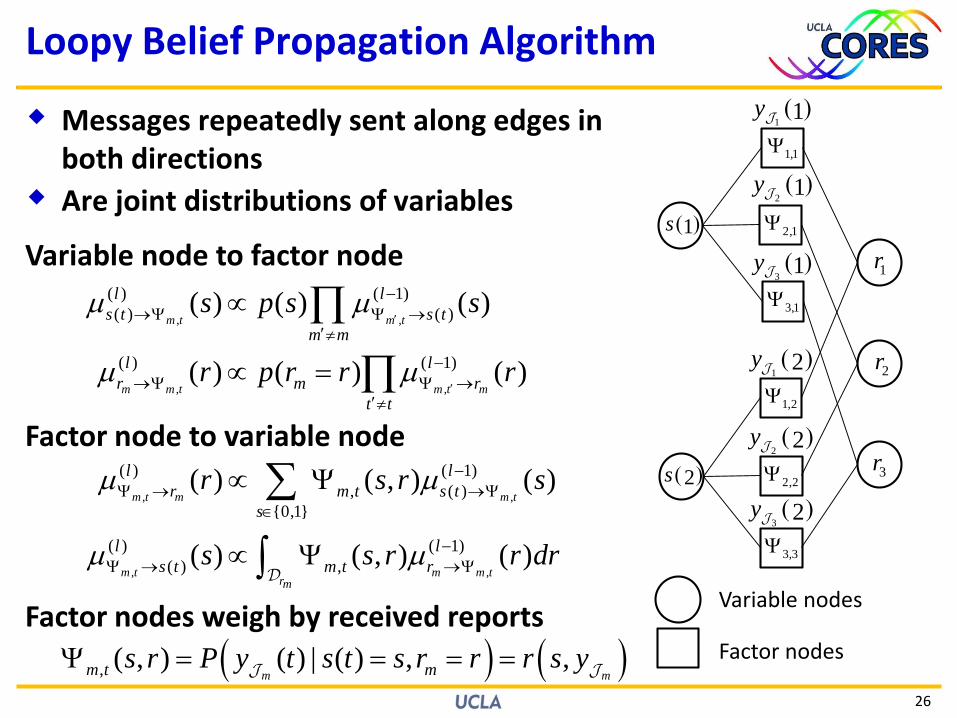
Loopy Belief Propagation Algorithm
Messages repeatedly sent along edges in both directions
Are joint distributions of variables
26
1s
2s
1r
2r
3r
1,1
1
1y
3,1
3
1y
1,2
1
2y
2,2
2
2y
3,3
3
2y
2,1
2
1y
Variable nodes
Factor nodes
, ,
, ,
( ) ( 1)
( ) ( )
( ) ( 1)
( ) ( ) ( )
( ) ( ) ( )
m t m t
m m t m t m
l l
s t s t
m m
l l
r m r
t t
s p s s
r p r r r
, ,
, ,
( ) ( 1)
, ( )
{0,1}
( ) ( 1)
( ) ,
( ) ( , ) ( )
( ) ( , ) ( )
m t m m t
m t m m trm
l l
r m t s t
s
l l
s t m t r
r s r s
s s r r dr
, ( , (( | ,)) ) ,m mm t ms r P y s t s r r r st y
Variable node to factor node
Factor node to variable node
Factor nodes weigh by received reports

D. Markovic / Slide 27
Beliefs and Estimator
Beliefs estimate posterior marginal of variables
Estimator:
27
1s
2s
1r
2r
3r
1,1
1
1y
3,1
3
1y
1,2
1
2y
2,2
2
2y
3,3
3
2y
2,1
2
1y
Variable nodes
Factor nodes
,
(
( ))
(
1
) )
(( ) ( ) ( )m t
Ml
m
s st t
lb s p s s
( ) ( )
{0,1}( )
ˆ ( ) arg max ( )l l
s ts
s t b s
Trajectory of beliefs in system with 8 SUs and T=5 time slots

D. Markovic / Slide 28
Attack Strategies
All SUs within one colluding set are statistically equivalent
Attack strategy operates on aggregated reports, e.g., sum
Define for
28
if '
1o.w.m
m
jj
jj
m
uyP
[0.5,1] {0,1, | |, }m