university of bridgeport department of computer science and engineering robotics, intelligent...
TRANSCRIPT
University of Bridgeport
Department of Computer Science and Engineering Robotics, Intelligent Sensing and control
RISC Laboratory
ROBOTICSROBOTICS

Robotics Engineering Robotics is a relatively new fields of
modern technology that crosses traditional engineering boundaries
Understanding the complexity of robots and their applications requires knowledge of – electrical engineering– mechanical engineering – industrial engineering– computer science

Robotics Engineering
New disciplines of engineering are beginning to emerge to deal with the complexity of the field of robotics, such as– manufacturing engineering– applications engineering– knowledge engineering
Within a few years it is possible that robotics engineering will stand on its own as a distinct engineering discipline

A PC-Based
Simulator/Controller/Monitor Software for Manipulators and
Electromechanical SystemsTarek M Sobh, AbdelShakour A Abuzneid
University of Bridgeport
Department of Computer Science and Engineering
Robotics, Intelligent Sensing and control
RISC Laboratory

Prototyping General form application is a very
important issue in industrial design Prototyping a design helps in determining
– system parameters– ranges – structuring better systems
Robotics is one of the industrial design fields in which prototyping is crucial for improved functionality.

Project Proposal We propose a PC-Based software package
to control, monitor and simulate a generic SIX-DOF robot that includes a spherical wrist
This package may be used as a black box for design implementations or as white (detailed) box for learning the basics of robotics and simulation technology

Design Tasks To design a complete and efficient robotic
system there is a need for performing a sequence of cascaded tasks.
The design task starts by – determining the application of the robot– performance requirements– determining the robot configuration and
suitable parameters for that application

Design Tasks
The physical design starts by ordering the parts and assembling the robot.
Developing the required software (controller, simulator and monitor) and hardware elements is the next task.
The next stage includes manipulator testing to compute performance and efficiency parameters for the robot design.

Prototyping Package Availability
Some of the companies introduce prototyping for special or specific manipulators.
Others try to design a whole prototyping package introducing mainly numerical solutions rather than closed form solutions.
Unfortunately such a generic pc-based controller/monitor/simulator package for a generic manipulator does not exist at this time.

Prototyping Package Availability
Check the following URL's for more information :– http://www.bridgeport.edu/sobhdir/introb/
node36.html– http://www.bridgeport.edu/sobhdir/introb/
rep.html– http://www.bridgeport.edu/sobhdir/proj/
wachter/– http://www.bridgeport.edu/sobhdir/proj/proto/
paper.html

Six Link Robot

Package Kernel Forward kinematics Inverse Kinematics Velocity Kinematics Inverse Velocity kinematics Acceleration Kinematics Inverse Acceleration kinematics Jacobian & Inverse Jacobian Singularities Dynamics and Inverse Dynamics

Possible Robot Configuration
Number Configuration
1 RRR:RRR
2 RRP:RRR
3 RPR:RRR
4 RPP:RRR
5 PRR:RRR
6 PRP:RRR
7 PPR:RRR
8 PPP:RRR
Package TasksNo. Task
1 Forward Kinematics
2 Inverse Kinematics
3 Velocity kinematics
4 Inverse Velocity Kinematics
5 Acceleration Kinematics

Package Tasks
No. Task
6 Inverse Acceleration Kinematics
7 Dynamics
8 Simulation
9 Trajectory Generation
10 GUI Monitoring

Controlling the robot using different schemes

The interface window for the PID controller simulator

PID Controller
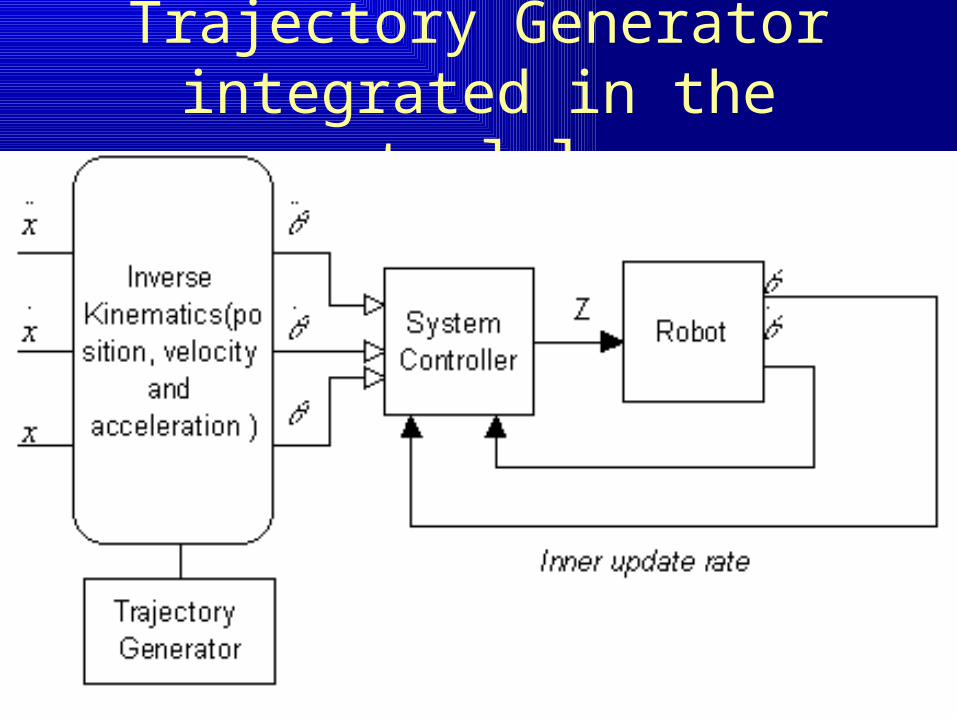
Trajectory Generator integrated in the control loop

Simulation Loop

Monitoring Menu for SIR-1 Robot

The End