universitÀ degli studi della basilicata - polo di … landsat e spot.pdf · i satelliti per il...
TRANSCRIPT

Pagina 1 di 99
UNIVERSITÀ DEGLI STUDI DELLA BASILICATA
- POLO di MATERA -
FACOLTÀ DI INGEGNERIA
D.U. IN INGEGNERIA DELL’AMBIENTE E DELLE RISORSE
IMMAGINI LANDSAT E SPOT: ESTRAZIONE DI PARAMETRI PER UNA
CARTOGRAFIA DI USO DEL SUOLO DELL’ALTA VAL D’AGRI
Relatore: Prof.sa Ing. Aurelia Sole
Diplomando: Borneo Vito Matricola …….
A.A. 2002/2003

Pagina 2 di 99
Premessa
I sistemi satellitari attualmente in uso consentono una copertura globale e
ciclica di quasi tutta la superficie terrestre.
Il Telerilevamento è sicuramente una disciplina affascinante, osservare
dall’alto e così da lontano il nostro pianeta rappresenta uno dei sogni più antichi
dell’uomo.
La tecnologia ci consente non solo di osservare nel mondo del visibile, ma
anche in quello dell’infrarosso, dove le tonalità di colore acquisiscono gradazioni
differenti da quelle a cui siamo normalmente abituati: la vegetazione ci appare
rossa e gli specchi d’acqua di colore nero, permettendone una più congrua
discriminazione.
Ad oggi, con i satelliti per scopi commerciali, non è possibile osservare
dettagli nitidi, ma siamo in grado di distinguere i diversi usi del suolo del nostro
pianeta: identificare le zone urbanizzate, separare i territori agricoli da quelli
boscati e le zone umide dai corpi idrici.
La cartografia di uso del suolo è un’importante strumento di pianificazione
territoriale, al cui utilizzo sono interessate le Amministrazioni in base alle diverse
estensioni territoriali (dai Comuni, alle Regioni, fino all’Unione Europea) ed alle
estensioni tematiche.
Il lavoro è stato svolto in ambito di tirocinio aziendale svoltosi in
collaborazione con la Geocart s.r.l. di Potenza, presso strutture messe a
disposizione dall’ASI di Matera nel Centro di Geodesia Spaziale.
A loro ed a quanti hanno collaborato al fine di realizzare questo lavoro, va
tutto il mio ringraziamento.

Pagina 3 di 99
Introduzione
La realizzazione di una cartografia di uso e copertura del suolo è un processo
lungo e costoso in particolare il superamento della “carta tradizionale” (intesa
come rappresentazione di un territorio ad una certa data e con una certa scala) al
“Database Informatico” rende possibile costruire dei “Sistemi Informativi” che
gestiscano al loro interno diverse modalità di rappresentazione degli stessi
elementi territoriali, legati alle diverse scale di interesse.
Alla ricchezza di informazioni deve però associarsi da un lato una
strutturazione mirata a garantirne la congruenza logica e geometrica, dall’altro un
processo basato sulle reali necessità che spingono una istituzione preposta al
governo del territorio a munirsi di uno strumento di conoscenza dell’ Uso del
Suolo.
L’analisi dei requisiti imposti dall’utente porta alla definizione dei livelli di
approfondimento più opportuni, tale livello di approfondimento (che nella
cartografia tradizionale viene riassunto nella “scala”) viene espresso in termini di:
• dettaglio tematico (legenda);
• densità informativa (unità minima cartografabile);
• precisione / accuratezza;
A questo proposito è bene anche ricordare il significato dei termini e delle
definizioni da adottare:
• Land Cover o copertura del suolo è ciò che attiene alle caratteristiche
fisiche della superficie terrestre come la distribuzione della vegetazione,
dell’acqua e dalle caratteristiche antropiche come insediamenti ed
infrastrutture;
• Land Use o uso del suolo è tutto ciò che attiene all’impiego ed alle
strategie di gestione di determinate coperture del suolo da parte dell’uomo.
Una volta individuati i requisiti è possibile definire il Modello concettuale,
ovvero la struttura delle informazioni che devono essere gestite nel sistema ed in
particolare le loro relazioni.

Pagina 4 di 99
Fig. 1 – Samples of land cover and land use mapping of identical territory (Feranec et al. 1996). A- Land cover: 1 - built up compound, 2 - built up area of scattered buildings, 3 - soil without vegetation, 4 - grassland, 5 - grassland with scattered trees and shrubs, 6 - coniferous forest, 7 - water bodies, B- Land use: 1 compound of agricultural buildings, 2 - leisure area, 3 - arable land without vegetation, 4 - pasture, 5- coniferous forest with protecting function relevant for water management 6 – nature reserve, 7 - pond.
Il database geografico sull’uso / copertura del suolo viene estratto da
immagini telerilevate elaborate ed interpretate a video – computer, appoggiandosi
su supporti ortocorretti e infine trasformato in formato vettoriale.
Attualmente i sistemi satellitari maggiormente idonei e che meglio rispondono
ai requisiti di base quali: multispettralità ed acquisizione continua della superficie
terrestre sono i satelliti Landsat e Spot.
L’aumento vertiginoso delle informazioni territoriali disponibili in svariate
forme di sistemi geografici e territoriali, unitamente all’avvento delle metodologie
satellitari per il posizionamento e la localizzazione di quelle informazioni e delle
tecnologie digitali di elaborazione, ha reso inderogabile affrontare il problema
anche dalla Comunità Europea.
La particolarità dei sistemi informativi geografici consiste nel fatto che le
informazioni, oltre ad avere una definizione quantitativa e/o qualitativa intrinseca,
sono anche collocate spazialmente, cioè definite, rispetto ad un sistema di
riferimento unificato.
Pagina 5 di 99
Per la realizzazione di cartografia relativa all’Uso del Suolo viene utilizzata la
legenda derivante dal sistema di nomenclatura del progetto CORINE Land
Cover della Unione Europea fino al terzo livello, avente come sistema di
coordinate di riferimento l’European Datum del 1950.

Pagina 6 di 99
Obiettivi del Lavoro
Il presente lavoro di tesi si propone il raggiungimento di due principali
obiettivi:
1) Confronto tra i dati provenienti dai satelliti Landsat e Spot;
2) Realizzazione di un data base geografico sull’uso / copertura del suolo, in
formato vettoriale, di una area campione della Val d’Agri.

Pagina 7 di 99
Indice
Premessa 2
Introduzione 3
Obiettivi del lavoro 6
Indice 7
Capitolo 1: il Telerilevamento
1.1 – Introduzione 9
1.2 – Cenni sul Telerilevamento 11
1.3 – Principi della radiazione Elettromagnetica 14
1.4 – Lo spettro elettromagnetico 16
1.5 – La propagazione dell’energia 17
1.6 – Caratteristiche spettrali degli elementi della superficie terrestre 21
1.7 – I sensori 24
Capitolo 2: Le missioni satellitari
2.1 – Introduzione 29
2.2 – Caratteristiche dati Landsat 30
2.3 – Il Satellite Spot 33
2.4 – Caratteristiche dati Spot 34
Capitolo 3: Il programma Corine
3.1 – Introduzione 36
3.2 – Il programma Corine: contenuti, finalità e metodologie 37
3.3 – La Legenda 39
3.4 – La legenda dettagliata 40
3.5 – Territori modellati artificialmente 41
3.6 – Territori agricoli 47
3.7 – Territori boscati e ambienti semi – naturali 53
3.8 – Zone umide 57
3.9 – Corpi idrici 60

Pagina 8 di 99
Capitolo 4 – Area di studio
4.1 – Introduzione 62
4.2 – La banca dati 65
4.3 – Utilizzo della banca dati 66
4.3.1 – Utilizzo dell’immagine Landsat del 30/08/01 e dell’immagine
Spot del 15/10/01
67
4.3.1.1 – Utilizzo dei dati Landsat 68
4.3.1.2 – Criterio usato: rapporto tra Bande 72
4.3.2 – Utilizzo dell’Immagine Landsat del 19/05/1984 75
4.3.3 – Utilizzo dell’immagine Landsat del 18/07/1994 e del
13/07/1998
76
4.3.4 – Ricapitolo sulle classi ricavate da ciascuna immagine 77
Capitolo 5 – Generazione della carta di uso del suolo
5.1 – Introduzione 78
5.2 – Cartografia in scala 1:250.000 – 1.100.000 79
5.3 – Considerazione generali sulla generalizzazione delle mappe 80
5.4 – Analisi della mappa 82
5.4.1 – Approccio alla classificazione 84
5.4.2 – Processi post classificazione 85
5.5 – Metodo di generalizzazione dei dati 87
5.5.1 – Generalizzazione dei dati dell’area di studio 88
5.5.2 – Dati in formato vettoriale 94
Capitolo 6 – Conclusioni e sviluppi futuri
6.1 – Conclusioni 95
6.2 – Sviluppi futuri 97
Bibliografia 98

Pagina 9 di 99
Capitolo 1: il Telerilevamento
1.1 – Introduzione Il telerilevamento si può dire che ebbe inizio nel 1840 quando le mongolfiere
acquisirono le prime immagini del territorio con la macchina fotografica appena
inventata. Probabilmente alla fine dell'ultimo secolo la piattaforma più nuova era
la rinomata flotta di piccioni che operava come novità in Europa (Figura 1.).
Figura 1.1 – La flotta dei piccioni
La fotografia aerea diventò uno strumento riconosciuto durante la Prima
Guerra Mondiale e lo fu a pieno durante la Seconda. L'entrata ufficiale dei
sensori nello spazio cominciò con l'inclusione di una macchina fotografica
automatica a bordo dei missili tedeschi V-2 lanciati dalle White Sands, NM.
L'avvento dello Sputnik nel 1957 rese possibile il montaggio di macchine da
ripresa su navicelle in orbita. I primi cosmonauti e astronauti documentavano con

Pagina 10 di 99
riprese dallo spazio la circumnavigazione del globo. I sensori che acquisivano
immagini in Bianco e Nero sulla Terra vennero montati su satelliti metereologici a
partire dal 1960. Altri sensori sugli stessi satelliti potevano poi eseguire sondaggi
o misure atmosferiche su una catena di rilievi.
Il telerilevamento raggiunse una successiva maturità, con sistemi operativi per
l'acquisizione di immagini sulla Terra con una certa periodicità, nel 1970 con
strumenti a bordo dello Skylab (e più tardi dello Space Shuttle) e su Landsat, il
primo satellite espressamente dedicato al monitoraggio di terre e oceani allo
scopo di mappare risorse culturali e naturali. Un sistema radar per l'acquisizione
di immagini è stato il primo sensore a bordo di Seasat e negli anni '80 una varietà
di sensori specializzati, CZCS, HCMM, e tra questi AVHRR, vennero messi in
orbita come progetti di ricerca o studi di fattibilità.
Il primo sistema radar non-militare fu lo Shuttle Imaging Radar SIR-A)
montato dal JPL a bordo dello Space Shuttle nel 1982. Altre nazioni realizzarono
poi altri sensori simili o con distinte capacità. A partire dal 1980 il Landsat è stato
privatizzato ed in diverse nazioni, tra cui Francia, Stati Uniti, Russia e Giappone,
ha avuto inizio un utilizzo più vasto e commerciale del telerilevamento.

Pagina 11 di 99
1.2 – Cenni sul Telerilevamento Il Telerilevamento (remote sensing) è definibile come quell’insieme di
tecniche, strumenti e mezzi interpretativi che permettono di estendere e migliorare
le capacità percettive dell’occhio umano, fornendo all’osservatore informazioni
qualitative e quantitative su oggetti posti a distanza e quindi sull’ambiente
circostante [Lechi, 1999].
Ha come scopo la produzione di mappe tematiche del territorio: per mappa
tematica si intende una carta sulla quale una generica superficie (per esempio
quella terrestre) è suddivisa in aree dal comportamento omogeneo rispetto a certe
caratteristiche. Il telerilevamento usa come veicolo d’informazione l’energia
elettromagnetica in tutte le sue forme di interazione con la superficie della Terra
(emissione, riflessione, diffusione ecc.).
La produzione di cartografia metrica è invece dominio della Fotogrammetria,
della topografia, e delle tecniche di descrizione del suolo
Estende quindi la capacità di osservazione dell’uomo nello spazio al di là del
suo campo visivo e nel mondo dell’invisibile, superando le possibilità spettrali
della sua retina, a quasi tutto lo spettro delle radiazioni elettromagnetiche.
Ciò che interessa è raccogliere informazioni qualitative e quantitative
provenienti da superfici poste in genere lontano dall’osservatore: lontano significa
fare riferimento a una distanza che può variare da qualche metro (proximal
sensing) fino a migliaia di chilometri (remote sensing), come nel caso delle
osservazioni effettuate dai satelliti geostazionari (36.000 Km dalla superficie
terrestre).
Le condizioni di osservazione dei satelliti artificiali dipendono dalle loro
proprietà astronomiche quali la distanza dell’orbita dalla Terra e la cadenza dei
sorvoli. L’inclinazione del piano orbitale rispetto a quello equatoriale definisce
l’estensione della zona della Terra che può essere sorvolata: si parla ad esempio di
orbita polare se l’inclinazione è prossima a 90°, fig. 1.1.

Pagina 12 di 99
Figura 1.2 – Orbite satellitari
I satelliti per il telerilevamento possono essere suddivisi in due grandi
famiglie: quelli meteorologici e quelli per l’osservazione della superficie terrestre
in senso stretto.
I primi sono geostazionari, ossia hanno una velocità angolare uguale a quella
della Terra, un’inclinazione di 0° e descrivono un’orbita circolare sul piano
dell’equatore. Gli altri, per lo scopo cui sono destinati, devono poter sorvolare
regolarmente una stessa regione, nelle stesse condizioni di illuminazione ed alla
medesima quota. Per questi motivi l’orbita non può essere che circolare, polare ed
eliosincrona. Tra questi satelliti è compresa la piattaforma Landsat 7 utilizzata in
questo studio.
Il termine “Landsat” indica sia un programma della NASA per lo studio delle
risorse terrestri mediante l’uso di satelliti artificiali, sia una serie di satelliti
dedicati a questo scopo. Il dominio del non visibile ha esteso incredibilmente le
capacità di analisi ambientale, tanto da ottenere risultati impossibili con altre
tecniche tradizionali: si pensi alle mappe termiche degli oceani, al controllo dello
stato di salute della vegetazione, all’inventario delle risorse naturali in zone
inaccessibili.
Il Telerilevamento è strettamente legato alle altre discipline del rilevamento
quali la geodesia, la fotogrammetria, la topografia, la cartografia ed anche ad altre
materie quali l’informatica, la statistica, l’elaborazione di immagini. Questa

Pagina 13 di 99
disciplina, nata per usi civili alla fine degli anni ‘60, a tutt’oggi ha già visto tre
generazioni di satelliti artificiali, durante lo sviluppo delle quali sono migliorate le
risoluzioni geometriche, radiometriche e spettrali; man mano che passa il tempo ci
si rende conto del piccolissimo rapporto fra dati utilizzati e dati ripresi, e nel
contempo dell’importanza dei dati “storici” quali unica testimonianza e memoria
dell’aspetto esteriore del nostro pianeta nel passato.

Pagina 14 di 99
1.3 – Principi della radiazione elettromagnetica L'unità fondamentale utilizzata nei fenomeni elettromagnetici è il fotone (un
tipo di "quanto", come definito nella teoria quantistica). Si tratta della particella
subatomica che corrisponde alla radiazione emessa dalla materia eccitata
termicamente, o da processi nucleari (fusione, fissione), o da altra radiazione. I
fotoni, privi di massa, si muovono alla velocità della luce: 300.000 km/sec.
Queste particelle hanno una natura "duale" per cui sono anche caratterizzate da
una propagazione ondosa. Tali onde sono rappresentabili analiticamente
attraverso funzioni trigonometriche, come illustrato nella figura 1.3.
Figura 1.3 – Diagramma di onde sinusoidali a diversa frequenza
La distanza fra punti equivalenti (corrispondenti a stesse ampiezze dell'onda)
su un treno d'onda è la lunghezza d'onda. Il numero di punti equivalenti che

Pagina 15 di 99
attraversano una posizione di riferimento in un secondo è indicato dalla frequenza
dell'onda (espressa in cicli/sec o hertz). Un fotone è caratterizzato da una certa
quantità di energia determinabile (in erg) dalla equazione generale di Planck:
E = h v
dove h è la costante di Planck (6.6260... x 10-34 Joule) e v indica la frequenza.
I fotoni di frequenza più alta sono dunque più energetici. Se un materiale eccitato
sperimenta un passaggio da un livello energetico più alto E2 ad un livello inferiore
E1, la formula precedente diventa:
laddove il valore di v e' dato da (v2 - v1); in altri termini, una particolare
transizione energetica è caratterizzata dall'emissione di radiazione (fotoni) con
una precisa frequenza e una corrispondente lunghezza d'onda λ.
La lunghezza d'onda è l'inverso della frequenza (frequenze più alte sono
associate a lunghezze d'onda più piccole e viceversa), secondo la relazione:
c = v λ
dove c è la costante che indica la velocità della luce, così che l'equazione di
Planck può essere riscritta come
E = hc / λ
Pagina 16 di 99
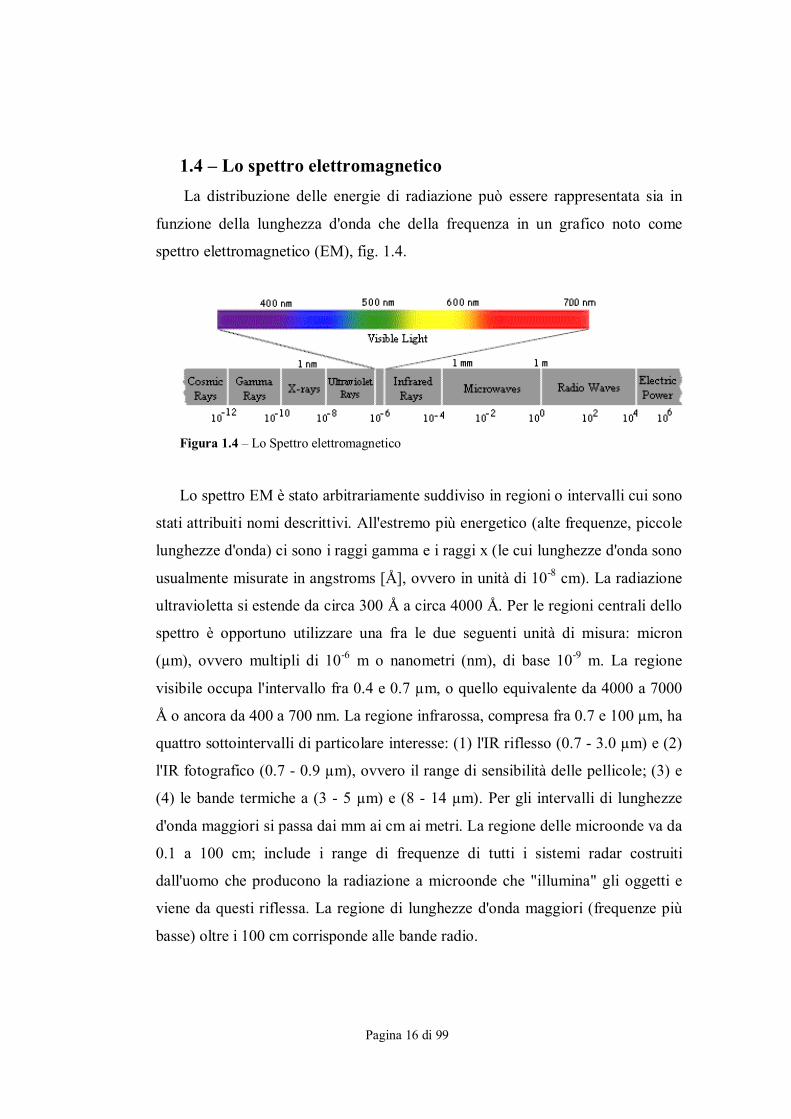
1.4 – Lo spettro elettromagnetico La distribuzione delle energie di radiazione può essere rappresentata sia in
funzione della lunghezza d'onda che della frequenza in un grafico noto come
spettro elettromagnetico (EM), fig. 1.4.
Figura 1.4 – Lo Spettro elettromagnetico
Lo spettro EM è stato arbitrariamente suddiviso in regioni o intervalli cui sono
stati attribuiti nomi descrittivi. All'estremo più energetico (alte frequenze, piccole
lunghezze d'onda) ci sono i raggi gamma e i raggi x (le cui lunghezze d'onda sono
usualmente misurate in angstroms [Å], ovvero in unità di 10-8 cm). La radiazione
ultravioletta si estende da circa 300 Å a circa 4000 Å. Per le regioni centrali dello
spettro è opportuno utilizzare una fra le due seguenti unità di misura: micron
(µm), ovvero multipli di 10-6 m o nanometri (nm), di base 10-9 m. La regione
visibile occupa l'intervallo fra 0.4 e 0.7 µm, o quello equivalente da 4000 a 7000
Å o ancora da 400 a 700 nm. La regione infrarossa, compresa fra 0.7 e 100 µm, ha
quattro sottointervalli di particolare interesse: (1) l'IR riflesso (0.7 - 3.0 µm) e (2)
l'IR fotografico (0.7 - 0.9 µm), ovvero il range di sensibilità delle pellicole; (3) e
(4) le bande termiche a (3 - 5 µm) e (8 - 14 µm). Per gli intervalli di lunghezze
d'onda maggiori si passa dai mm ai cm ai metri. La regione delle microonde va da
0.1 a 100 cm; include i range di frequenze di tutti i sistemi radar costruiti
dall'uomo che producono la radiazione a microonde che "illumina" gli oggetti e
viene da questi riflessa. La regione di lunghezze d'onda maggiori (frequenze più
basse) oltre i 100 cm corrisponde alle bande radio.
Pagina 17 di 99
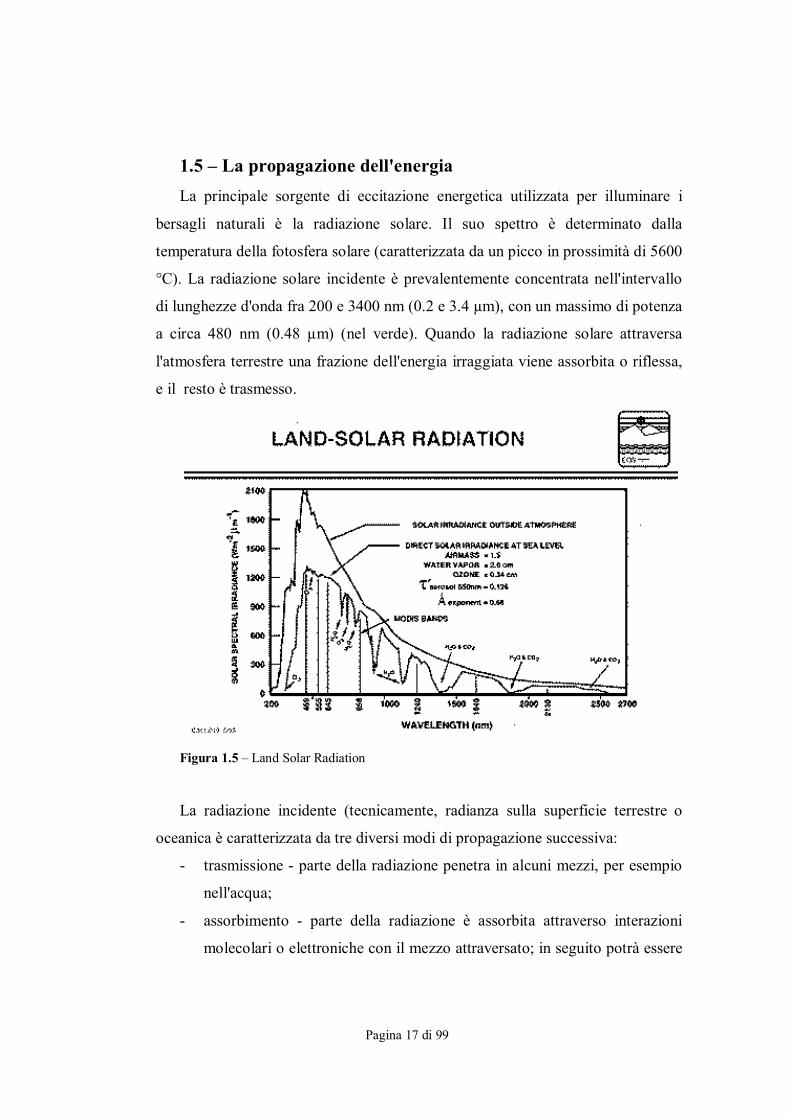
1.5 – La propagazione dell'energia La principale sorgente di eccitazione energetica utilizzata per illuminare i
bersagli naturali è la radiazione solare. Il suo spettro è determinato dalla
temperatura della fotosfera solare (caratterizzata da un picco in prossimità di 5600
°C). La radiazione solare incidente è prevalentemente concentrata nell'intervallo
di lunghezze d'onda fra 200 e 3400 nm (0.2 e 3.4 µm), con un massimo di potenza
a circa 480 nm (0.48 µm) (nel verde). Quando la radiazione solare attraversa
l'atmosfera terrestre una frazione dell'energia irraggiata viene assorbita o riflessa,
e il resto è trasmesso.
Figura 1.5 – Land Solar Radiation
La radiazione incidente (tecnicamente, radianza sulla superficie terrestre o
oceanica è caratterizzata da tre diversi modi di propagazione successiva:
- trasmissione - parte della radiazione penetra in alcuni mezzi, per esempio
nell'acqua;
- assorbimento - parte della radiazione è assorbita attraverso interazioni
molecolari o elettroniche con il mezzo attraversato; in seguito potrà essere

Pagina 18 di 99
parzialmente riemessa: emittanza), soprattutto in corrispondenza delle
lunghezze d'onda maggiori, cosicché la radiazione solare contribuisce al
riscaldamento dei corpi che forniscono una risposta termica;
- riflessione - parte della radiazione è effettivamente riflessa (e diffusa) dal
bersaglio a diversi angoli (in funzione della "rugosità" della superficie e
dell'orientazione relativa della direzione di incidenza della radiazione
solare rispetto all'inclinazione della superficie), inclusa la direzione del
sensore che effettua l'osservazione. Un gran numero di sistemi di
telerilevamento sono designati alla misura della radiazione riflessa.
Figura 1.6 – Trasmissione atmosferica della radiazione incidente per diverse lunghezze
d'onda
L’immagine in fig. 1.5, riporta un diagramma generalizzato che illustra la
trasmissione atmosferica della radiazione incidente per diverse lunghezze d'onda.
Il blu evidenzia le zone di minima radiazione incidente e/o riflessa mentre in
bianco sono riportate le aree note come "finestre atmosferiche" in cui la
radiazione ha una quantità ridotta di interazioni con le diverse specie molecolari, e
può quindi attraversare l'aria con perdite minime o nulle dovute all'assorbimento.
La maggior parte dei sensori per il telerilevamento in aria o sulle piattaforme
spaziali sono stati costruiti per operare in una o più di una di tali finestre e
effettuano le misure utilizzando rivelatori "sintonizzati" su certe frequenze
(lunghezze d'onda) specifiche che attraversano l'atmosfera. Nondimeno alcuni
sensori, in particolar modo quelli a bordo dei satelliti metereologici, mirano a
misurare direttamente fenomeni di assorbimento, quali quelli dovuti al CO2 e ad
altre molecole gassose. Si osservi come l'atmosfera sia praticamente opaca alla

Pagina 19 di 99
radiazione EM in parte dell' infrarosso medio e in tutto l'infrarosso lontano. Nella
regione delle microonde invece la maggior parte della radiazione attraversa
l'atmosfera non ostacolata per cui i segnali radar di tutte le bande comunemente
utilizzate raggiungeranno la superficie (sebbene le goccioline di pioggia
producano riflessioni che consentono di rivelare le precipitazioni).
La quantità di radiazione EM riflessa (assorbita, trasmessa) da un qualsiasi
oggetto varia al variare della lunghezza d'onda. Questa importante proprietà della
materia consente l'identificazione e la separazione di diverse sostanze o classi
attraverso la loro firma spettrale (curve spettrali) come mostrato in figura 1.7.
Figura 1.7 – Alcune firme spettrali
Dunque la sabbia può riflettere più luce della vegetazione a certe lunghezze
d'onda ma assorbirne di più ad altre. In linea di principio, vari tipi di superfici
possono essere riconosciute e distinte fra loro grazie a tali differenze nelle
riflettività relative, supposto che ci sia un metodo adeguato per la misura di tali
differenze in funzione della lunghezza d'onda e dell'intensità della radiazione
riflessa (come frazione o percentuale della radiazione incidente). A scopo
esemplificativo si osservino, nella figura 1.8, le posizioni dei punti che indicano le
percentuali di riflettività in corrispondenza di due lunghezze d'onda per quattro

Pagina 20 di 99
tipi comuni di superfici (GL = terreni erbosi; PW = pinete; RS = sabbia rossa; SW
= acqua fangosa).
Figura 1.8 – percentuali di riflettività
Qualora si considerino più di due lunghezze d'onda, i grafici in spazi
multidimensionali tendono ad aumentare la separabilità di materiali diversi;
questa è la base del telerilevamento multispettrale.

Pagina 21 di 99
1.6 – Caratteristiche spettrali degli elementi della superficie
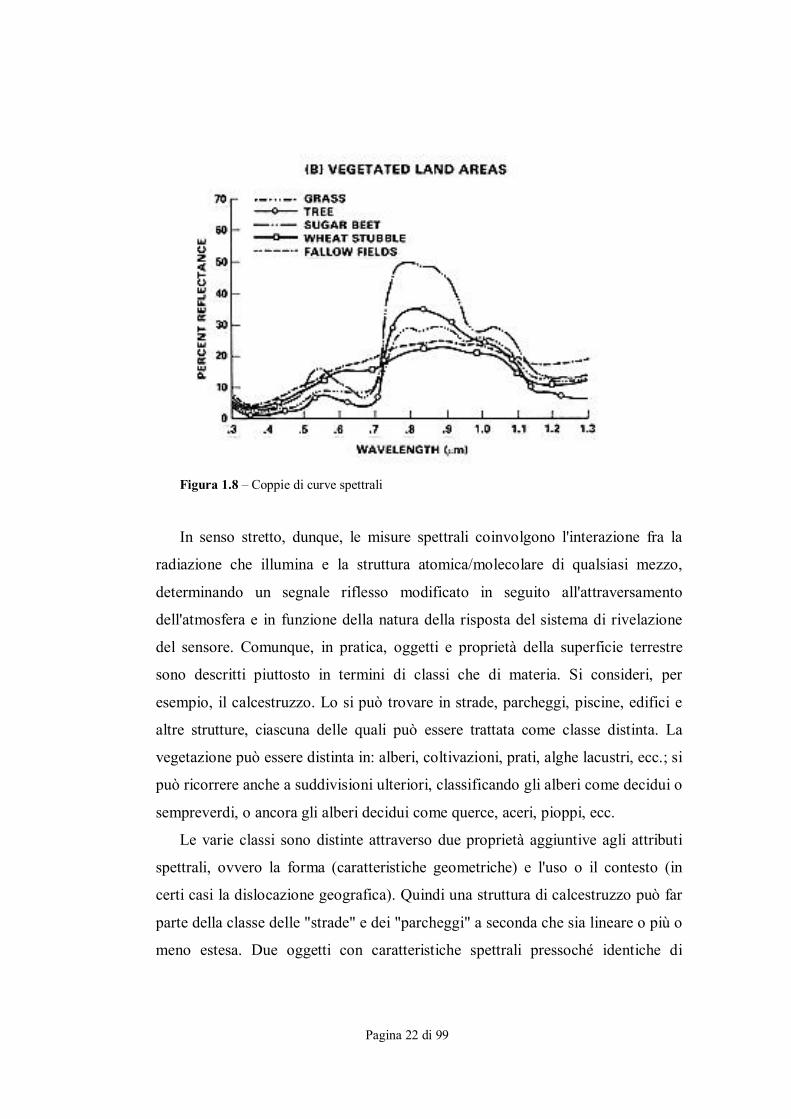
terrestre Nella coppia di curve spettrali mostrate in fig. 1.9 (misurate in campo con uno
spettrometro portatile) è evidente che la risposta spettrale della vegetazione è
distinta da quella della materia inorganica grazie alla improvvisa crescita della
riflettività a circa 0.7 µm seguita da una graduale diminuzione fino al
raggiungimento dell'intervallo a 1.1 µm. Le prime curve (a sinistra o in alto)
indicano una crescita graduale della riflettività all'aumentare della lunghezza
d'onda per materiali prodotti dall'uomo. Il calcestruzzo, caratterizzato da una
colorazione tenue, ha una risposta media più elevata dell'asfalto scuro; gli altri
materiali si collocano nel mezzo (la ghiaia è probabilmente più blu come
suggerito dalla crescita della riflettanza fra 0.4 a 0.5 µm e dalla risposta piatta nel
resto della regione visibile [0.4 - 0.7 µm]). Le altre curve (a destra o in basso)
indicano che gran parte dei tipi di vegetazione hanno una risposta molto simile fra
0.3 e 0.5 µm; mostrano variazioni modeste nell'intervallo 0.5 - 0.6 µm; e la loro
massima variabilità (e quindi la discriminazione ottimale) è fra 0.7 e 0.9 µm.
Pagina 22 di 99
Figura 1.8 – Coppie di curve spettrali
In senso stretto, dunque, le misure spettrali coinvolgono l'interazione fra la
radiazione che illumina e la struttura atomica/molecolare di qualsiasi mezzo,
determinando un segnale riflesso modificato in seguito all'attraversamento
dell'atmosfera e in funzione della natura della risposta del sistema di rivelazione
del sensore. Comunque, in pratica, oggetti e proprietà della superficie terrestre
sono descritti piuttosto in termini di classi che di materia. Si consideri, per
esempio, il calcestruzzo. Lo si può trovare in strade, parcheggi, piscine, edifici e
altre strutture, ciascuna delle quali può essere trattata come classe distinta. La
vegetazione può essere distinta in: alberi, coltivazioni, prati, alghe lacustri, ecc.; si
può ricorrere anche a suddivisioni ulteriori, classificando gli alberi come decidui o
sempreverdi, o ancora gli alberi decidui come querce, aceri, pioppi, ecc.
Le varie classi sono distinte attraverso due proprietà aggiuntive agli attributi
spettrali, ovvero la forma (caratteristiche geometriche) e l'uso o il contesto (in
certi casi la dislocazione geografica). Quindi una struttura di calcestruzzo può far
parte della classe delle "strade" e dei "parcheggi" a seconda che sia lineare o più o
meno estesa. Due oggetti con caratteristiche spettrali pressoché identiche di

Pagina 23 di 99
vegetazione potrebbero essere assegnate alle classi "foresta" e "area coltivata" in
funzione della regolarità dei contorni (rettilinei, spesso con strutture rettangolari o
irregolari). Un'applicazione fondamentale del telerilevamento è nella
classificazione della miriade di tipologie presenti in una scena (generalmente
presentata come immagine) in categorie significative o classi che possono essere
convertite in mappa tematica.
Obiettivo di un qualsiasi sistema di telerilevamento è semplicemente la
rivelazione di segnali di radiazione, la determinazione del loro carattere spettrale,
la derivazione di adeguate firme, e la correlazione delle distribuzioni geografiche
delle classi che rappresentano. Tutto ciò ha come risultato la visualizzazione di un
prodotto interpretabile, che può essere una mappa o un insieme di dati numerici,
che rispecchia le caratteristiche di una superficie (o di una proprietà
dell'atmosfera) attraverso indicazioni sulla natura e sulla distribuzione degli
oggetti presenti nel campo di vista.

Pagina 24 di 99
1.7 – I Sensori La radiazione riflessa viene registrata a distanza da un sensore. In realtà la
radiazione effettiva misurata risente anche degli effetti di assorbimento e
diffusione cui va soggetto il segnale durante la sua propagazione attraverso
l'atmosfera. Più del 50% dello spettro elettromagnetico é inutilizzabile perché la
radiazione corrispondente é totalmente bloccata dall'atmosfera. In definitiva, ciò
che viene quindi registrato dal sensore ed espresso con un valore di intensità
relativa, non é soltanto la radiazione proveniente dalla superficie,
ma anche il risultato di tutti questi processi fisici di interazione con le particelle
atmosferiche.
Un sensore non é altro che uno strumento capace di acquisire informazioni
attraverso la misura e la registrazione di energia elettromagnetica.
Perché un sensore possa raccogliere e registrare l'energia riflessa o emessa
dalla superficie, deve essere posto su una piattaforma stabile lontana dalla
superficie che deve essere osservata. Le piattaforme per sensori remoti possono
essere situati sul terreno, su un aereo o su una navicella o un satellite al di fuori
dell'atmosfera terrestre.
Sensori a terra sono spesso usati per registrare le informazioni della superficie
da confrontare con le informazioni raccolte dai sensori montati su aereo o su
satellite. In alcuni casi possono essere usati per meglio caratterizzare il target
osservato che è stato visualizzato da questi altri sensori, rendendo possibile una
migliore comprensione delle informazioni nelle immagini. Le piattaforme aeree
sono spesso usate per ottenere immagini di dettaglio. Nello spazio il rilevamento a
distanza è, a volte, effettuato da uno shuttle o, più comunemente, da satellite.
I sensori possono essere attivi o passivi: questi ultimi misurano la radiazione
naturalmente disponibile (emessa o riflessa dagli oggetti), i sensori attivi generano
invece un segnale che "illumina" l'oggetto e ne registrano l'eco di ritorno. I sensori
passivi possono solo essere usati per registrare l'energia che è disponibile
naturalmente. Per tutte le energie riflesse, questo può avvenire solo quando il sole

Pagina 25 di 99
illumina la Terra, per cui la notte non c'è energia riflessa disponibile. L'energia
che viene naturalmente emessa (come quella dell'infrarosso termico) può essere
registrata sia di giorno che di notte, purchè la quantità di energia sia tale da essere
registrata. I sensori attivi, invece, forniscono la sorgente di energia per
l'illuminazione. Il sensore emette la radiazione che è diretta verso l'oggetto che
deve essere osservato. La radiazione riflessa dall'oggetto è registrata e misurata
dal sensore. I vantaggi dei sensori attivi comprendono la capacità di ottenere
misure in ogni momento senza problemi legati al momento del giorno o della
stagione. Comunque i sistemi attivi richiedono la generazione di una enorme
quantità di energia per illuminare adeguatamente l'oggetto. Un esempio di sensore
attivo è il Radar ad Apertura Sintetica (SAR).
Ogni sensore é caratterizzato da quattro proprietà:
- la risoluzione spaziale;
- la risoluzione radiometrica;
- la risoluzione spettrale;
- la risoluzione temporale.
La risoluzione spaziale é l'area minima sul terreno vista dallo strumento da
una data altezza ad un dato istante e viene rappresentata dalla dimensione
dell'elemento di superficie riconoscibile in una immagine registrata da un sistema
di telerilevamento o, ancora, dalla distanza minima entro la quale due oggetti
appaiono distinti nell'immagine. Per alcuni strumenti di telerilevamento, la
distanza tra gli oggetti che devono essere visualizzati e la piattaforma gioca un
ruolo importante nel determinare il dettaglio delle informazioni ottenute e l'area
totale visualizzata dal sensore. Sensori a bordo di piattaforme molto lontane dagli
oggetti da osservare normalmente osservano un'area più grande ma non possono
ottenere un grande dettaglio. Il dettaglio in una immagine dipende dalla
risoluzione spaziale del sensore. La risoluzione spaziale dei sensori passivi
dipende prima di tutto dal loro Istantaneo Campo di Vista (Instantaneous Field of
View o IFOV), fig. 1.10.

Pagina 26 di 99
Figura 1.10 – IFOV
L'IFOV è il cono angolare di visibilità del sensore e determina l'area della
superficie terrestre che è "vista" ad una data altezza in un particolare momento. La
dimensione dell'area osservata è determinata moltiplicando l'IFOV per la distanza
dal terreno al sensore. Quest'area sul terreno è detta cella di risoluzione e
determina la risoluzione spaziale massima del sensore. Perché un oggetto
omogeneo sia osservabile, la sua dimensione generalmente deve essere uguale o
più grande della cella di risoluzione. Se l'oggetto è più piccolo di questa, non può
essere identificato per cui sarà registrata la luminosità media di tutti gli oggetti in
quella cella di risoluzione.
I satelliti commerciali forniscono immagini con risoluzioni che variano da
pochi metri a diversi chilometri, figura 1.11.
30 metri 10 metri 3 metri
Figura 1.11 – Stessa area osservata a diverse risoluzioni
Pagina 27 di 99
La risoluzione radiometrica rappresenta la minima differenza di intensità
che un sensore può rilevare tra due valori di energia raggiante. Le caratteristiche
radiometriche descrivono il contenuto informativo in un'immagine. Ogni volta
che una immagine è acquisita su un film o da un sensore, la sua sensibilità alla
grandezza dell'energia elettromagnetica determina la risoluzione radiometrica.
Migliore è la risoluzione radiometrica di un sensore, più sensibile è nel registrare
piccole differenze nell'energia riflessa o emessa. E' anche definito come il numero
di livelli discreti in cui può venire suddiviso un segnale. I dati in una immagine
sono rappresentati da numeri digitali positivi che variano da 0 a (uno meno di)
una potenza di 2. Questo range corrisponde al numero di bits usati per codificare i
numeri nel formato binario. Ciascun bit registra un esponente della potenza di due
(per esempio 1 bit = 21 = 2). Il massimo numero di livelli di luminosità disponibili
dipende dal numero di bits usati per rappresentare l'energia registrata. Quindi se
un sensore usa 8 bits per registrare i dati, i valori digitali disponibili sono 28 =
256, variando da 0 a 255. Se sono usati solo 4 bits i valori disponibili saranno 24
= 16 variando da 0 a 15 con una risoluzione radiometrica minore. I dati in una
immagine sono generalmente visualizzati in un intervallo di toni di grigio con il
nero che rappresenta il numero digitale 0 e il bianco che rappresenta il valore
massimo (per esempio 255 in dati a 8 bit). Confrontando una immagine a 2 bit
con una a 8 bit possiamo vedere che c'è una grande differenza nel livello di
dettaglio individuabile in funzione della risoluzione radiometrica. Più alto è il
numero di livelli di grigio, migliore è la risoluzione radiometrica.
La risoluzione spettrale é l'ampiezza delle bande spettrali risolte dal sensore
cioè il minimo intervallo tra le lunghezze d'onda medie di due bande spettrali che
un sensore può separare. Migliore è la risoluzione spettrale, più sottile è
l'intervallo di lunghezze d'onda per una particolare banda. Le pellicole in bianco e
nero registrano le lunghezze d'onda che si estendono su tutta la porzione del
visibile dello spettro elettromagnetico. La sua risoluzione spettrale è piuttosto
bassa dal momento che diverse lunghezze d'onda dello spettro del visibile non
sono distinte singolarmente, ma viene registrata la riflettanza globale nell'intera
Pagina 28 di 99
porzione del visibile. Anche le pellicole a colori sono sensibili all'energia riflessa
dalla porzione visibile dello spettro, ma hanno una risoluzione spettrale più alta
per cui sono sensibili all'energia riflessa singolarmente nel blu, nel verde e nel
rosso. Quindi possono rappresentare oggetti di diversi colori in funzione della loro
riflettanza in ciascuno di questi intervalli di lunghezza d'onda.
Molti sistemi di telerilevamento registrano l'energia di intervalli separati di
lunghezza d'onda a diverse risoluzioni spettrali. Questi sono detti sensori
multispettrali. Sensori multispettrali avanzati, chiamati iperspettrali, registrano
centinaia di ristrette bande spettrali nella porzione dello spettro elettromagnetico
del visibile, dell'infrarosso vicino e del medio infrarosso. La loro risoluzione
spettrale molto alta rende possibile la discriminazione tra differenti oggetti sulla
base della loro risposta spettrale in ciascuna delle bande.
La risoluzione temporale é il tempo che intercorre tra acquisizioni successive
della stessa area. Il periodo di rivisitazione di un sensore satellitare è normalmente
di diversi giorni. Quindi la risoluzione temporale assoluta di un sistema di
telerilevamento per riprendere una seconda volta la stessa area con lo stesso
angolo di vista è uguale a questo periodo. Comunque, a causa del fatto che c'è una
certa sovrapposizione dell'ampiezza di ripresa di orbite adiacenti per la maggior
parte dei satelliti, e che questa sovrapposizione aumenta all'aumentare della
latitudine, alcune aree della Terra possono essere riprese più frequentemente.
Inoltre, alcuni satelliti hanno la capacità di orientare i loro sensori per riprendere
la stessa area in passaggi differenti con intervalli temporali più ristretti. Quindi la
risoluzione temporale di un sensore dipende da una varietà di fattori fra cui le
caratteristiche del satellite e del sensore, la sovrapposizione dell'ampiezza di
ripresa e la latitudine.

Pagina 29 di 99
Capitolo 2: Le missioni satellitari Landsat e Spot
2.1 - Introduzione Le missioni di Osservazione della Terra vengono classificate in: scientifiche,
operative e commerciali. Le missioni scientifiche sono dedicate allo studio e alla
ricerca sull'ambiente e sul clima, quelle operative sono missioni gestite da autorità
Governative, spesso multinazionali, dedicate ad applicazioni operative del
telerilevamento, le missioni commerciali sono quelle che hanno come obbiettivo
il ritorno di parte dei costi di sviluppo dalla vendita dei dati.
Pagina 30 di 99
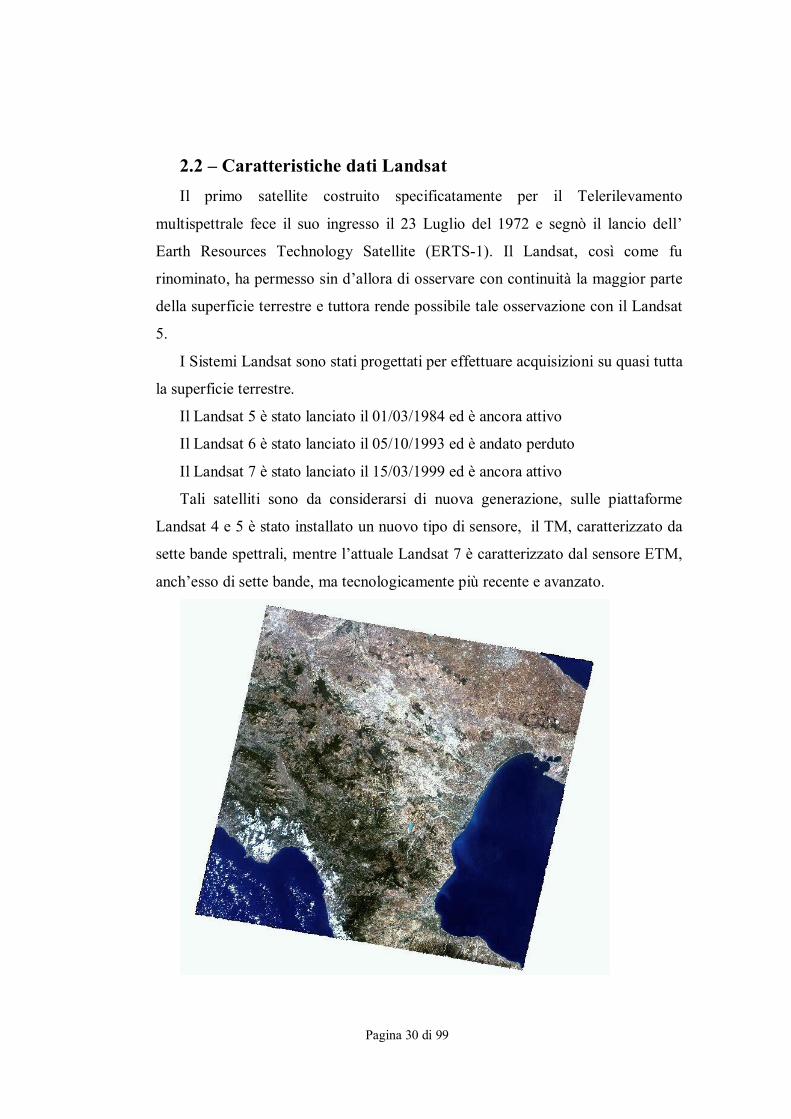
2.2 – Caratteristiche dati Landsat Il primo satellite costruito specificatamente per il Telerilevamento
multispettrale fece il suo ingresso il 23 Luglio del 1972 e segnò il lancio dell’
Earth Resources Technology Satellite (ERTS-1). Il Landsat, così come fu
rinominato, ha permesso sin d’allora di osservare con continuità la maggior parte
della superficie terrestre e tuttora rende possibile tale osservazione con il Landsat
5.
I Sistemi Landsat sono stati progettati per effettuare acquisizioni su quasi tutta
la superficie terrestre.
Il Landsat 5 è stato lanciato il 01/03/1984 ed è ancora attivo
Il Landsat 6 è stato lanciato il 05/10/1993 ed è andato perduto
Il Landsat 7 è stato lanciato il 15/03/1999 ed è ancora attivo
Tali satelliti sono da considerarsi di nuova generazione, sulle piattaforme
Landsat 4 e 5 è stato installato un nuovo tipo di sensore, il TM, caratterizzato da
sette bande spettrali, mentre l’attuale Landsat 7 è caratterizzato dal sensore ETM,
anch’esso di sette bande, ma tecnologicamente più recente e avanzato.

Pagina 31 di 99
Caratteristiche del sensore TM – Thematic Mapper
Name of sensor Thematic Mapper Platform Landsat 4 – 5 Type Opto-mechanical scanner Spatial resolution (m) 30/120 Spectral range (μm) 0.45 – 12.5 Number of bands 7 Temporal resolution (days) 16 Size of image (Km) 185 x 172 Swath (Km) 185
Caratteristiche del sensore ETM – Enchanced Thematic Mapper
Name of sensor ETMP – Enchanced Thematic Mapper Platform Landsat 7 Type Opto-mechanical scanner Spatial resolution (m) 15/30/60 Spectral range (μm) 0.45 – 12.5 Number of bands 8 Temporal resolution (days) 16 Size of image (Km) 183 x 170 Swath (Km) 183
Caratteristiche delle bande del sensore TM
Band Number Spectral Range (μm) Ground Resolution (m) 1 0.450 – 0.515 30 2 0.525 – 0.605 30 3 0.630 – 0.690 30 4 0.750 – 0.900 30 5 1.550 – 1.750 30 6 10.400 – 12.500 120 7 2.090 – 2.350 30

Pagina 32 di 99
Caratteristiche delle bande del sensore Multispettrale ETM
Band Number Spectral Range (μm) Ground Resolution (m) 1 0.450 – 0.515 30 2 0.525 – 0.605 30 3 0.630 – 0.690 30 4 0.750 – 0.900 30 5 1.550 – 1.750 30 6 10.400 – 12.500 60 7 2.090 – 2.350 30
Caratteristiche delle bande del sensore Pancromatico ETM
Band Number Spectral Range (μm) Ground Resolution (m) Pan 0.520 – 0.900 15
Caratteristiche Orbitali Landsat 4 – 5 e 7
Orbita Sun – synchronous, near polar Altitudine (Km) 705 Periodo (minuti) 99 Ciclo copertura (giorni) 16
Figura 2.2 – Caratteristiche di copertura del satellite Landsat

Pagina 33 di 99
2.3 – Il satellite SPOT Gli scanner simili a quelli montati su Landsat (TM, MSS) sono stati i primi
sensori di osservazione della terra negli anni 1970-80. Questi strumenti dotati di
parti mobili e oscillanti come gli specchi erano soggetti a deterioramento (sebbene
possiamo ricordare che l’MSS sul Landsat 5 ha continuato a funzionare nel 1998
dopo il lancio avvenuto nel Marzo 1984). Un nuovo approccio chiamato scanner
“a scopa battente” fu sviluppato nel frattempo sfruttando i CCD (Charge-Coupled
Devices) come rivelatori. Un CCD è un piccolo sensore sensibile alla luce. Il
primo utilizzo su satelliti di osservazione della terra è stato lo SPOT-1 francese
lanciato nel 1986
Pagina 34 di 99
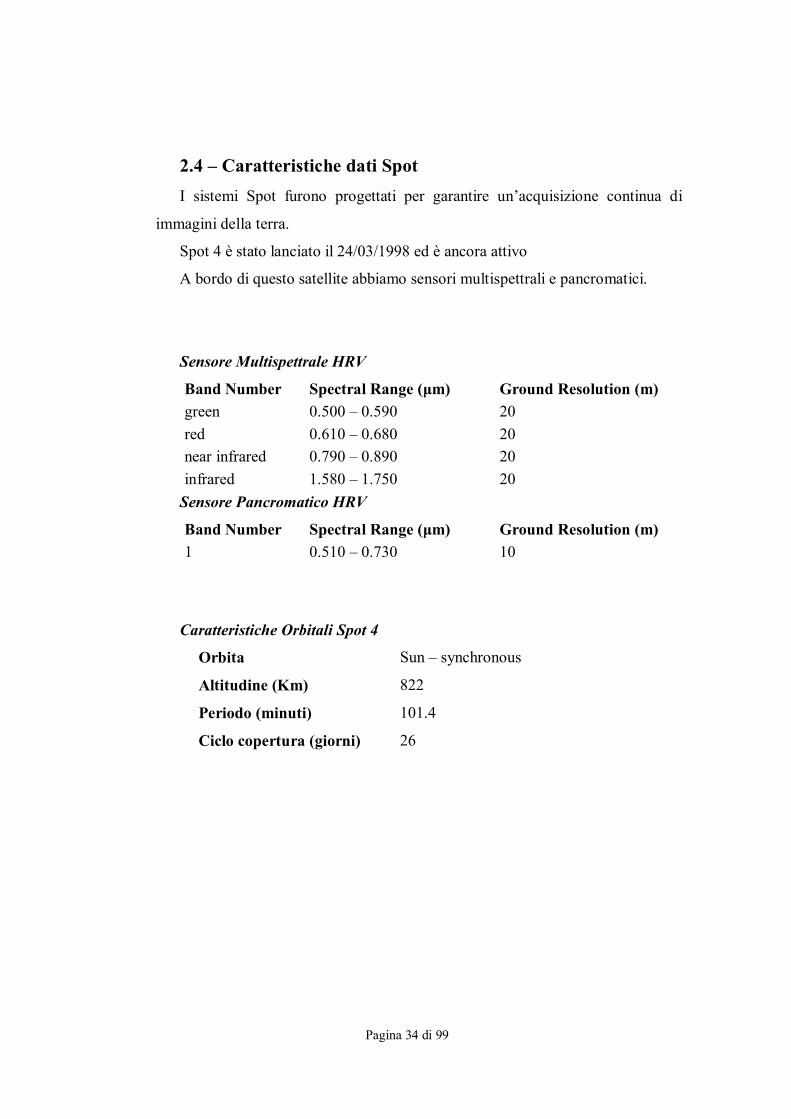
2.4 – Caratteristiche dati Spot I sistemi Spot furono progettati per garantire un’acquisizione continua di
immagini della terra.
Spot 4 è stato lanciato il 24/03/1998 ed è ancora attivo
A bordo di questo satellite abbiamo sensori multispettrali e pancromatici.
Sensore Multispettrale HRV
Band Number Spectral Range (μm) Ground Resolution (m) green 0.500 – 0.590 20 red 0.610 – 0.680 20 near infrared 0.790 – 0.890 20 infrared 1.580 – 1.750 20
Sensore Pancromatico HRV
Band Number Spectral Range (μm) Ground Resolution (m) 1 0.510 – 0.730 10
Caratteristiche Orbitali Spot 4
Orbita Sun – synchronous
Altitudine (Km) 822
Periodo (minuti) 101.4
Ciclo copertura (giorni) 26

Pagina 35 di 99
Entrambi i sensori hanno uno swath di 60 Km ogni 80 Km
Figura 2.3 – Caratteristiche di copertura del satellite Spot

Pagina 36 di 99
Capitolo 3 – Il Programma CORINE
3.1 – Introduzione
Il programma CORINE (COoRdination de l' INformation sur l'
Environnement), varato dal Consiglio delle Comunità Europee nel 1985, e
prodotto dall’European Environment Agency, ha lo scopo primario di verificare
dinamicamente lo stato dell'ambiente nell'area comunitaria, al fine di orientare le
politiche comuni, controllarne gli effetti, proporre eventuali correttivi.
Obiettivi secondari, ma non per questo meno validi, sono la formazione e la
diffusione di standard e metodologie comuni e la promozione di contatti e scambi
internazionali, per facilitare la realizzazione di iniziative intercomunitarie.
All'interno del programma CORINE, il progetto CORINE-Land Cover è
specificamente destinato al rilevamento e al monitoraggio, ad una scala
compatibile con le necessità comunitarie, delle caratteristiche del territorio, con
particolare attenzione alle esigenze di tutela.
L'azione relativa ha preso le mosse nel 1986, con un intervento pilota sul
Portogallo, nel corso del quale sono state individuate e messe a punto esigenze
strumentali e metodologie.
Il progetto e' attualmente in corso di completamento nell'ambito dell'Unione
Europea, e si è esteso anche a Paesi dell'Est europeo e del bacino mediterraneo
non appartenenti all'Unione.
Pagina 37 di 99
3.2 – Il programma CORINE: contenuti, finalità e
metodologie Il progetto CORINE Land Cover prevede la realizzazione di una cartografia
della copertura del suolo alla scala di 1:100.000, con una legenda di 44 voci su 3
livelli gerarchici, e fa riferimento ad unità spaziali omogenee o composte da zone
elementari appartenenti ad una stessa classe, di superficie significativa rispetto
alla scala, nettamente distinte dalle unità che le circondano e sufficientemente
stabili per essere destinate al rilevamento di informazioni più dettagliate.
Nel quadro del progetto l'unità spaziale da cartografare è stata definita in
modo da soddisfare tre esigenze fondamentali:
• Garantire la leggibilità della restituzione cartacea e agevolare il processo
di digitalizzazione a partire dai lucidi di interpretazione;
• Permettere di rappresentare quegli elementi della realtà al suolo
essenziali per coprire le esigenze tematiche del progetto;
• Raggiungere un rapporto costi/benefici, in termini di soddisfazione delle
esigenze conoscitive sulla copertura del suolo, compatibile con le
disponibilità finanziarie complessive.
Ciò premesso, la superficie minima cartografabile è stata indicata in 25
ettari, e corrisponde, alla scala di rappresentazione prescelta, ad un quadrato di 5
mm di lato o ad un cerchio di 2,8 mm di raggio.
La carta finale risultante, in formato numerico, costituisce la base di
riferimento geografico e tematico del Sistema Informativo CORINE.
Il progetto CORINE – Land Cover intende principalmente fornire al
programma CORINE e ad ogni possibile utilizzatore interessato informazioni
sulla copertura del suolo. Queste informazioni devono essere quanto più possibile:
• omogenee
• esattamente compatibili e comparabili per tutti i paesi interessati
• suscettibili di aggiornamento periodico
• di costo sostenibile
Pagina 38 di 99
Il progetto è inoltre finalizzato a fornire agli operatori locali gli strumenti
culturali e metodologici necessari per la prima elaborazione e per i successivi
aggiornamenti.
La metodologia operativa adottata consta di 5 fasi:
1) Lavori preliminari;
2) Preparazione delle immagini satellitari (di norma Landsat D-TM
Spot-HRV), in falso colore, per lo più con la combinazione, per il
Thematic Mapper delle bande 4,5,3, che è quella che consente la
miglior discriminazione degli oggetti identificati nella legenda;
3) Fotointerpretazione assistita da calcolatore. Delimitazione-
identificazione degli oggetti. Validazione dell'interpretazione;
4) Digitalizzazione;
5) Validazione della banca dati

Pagina 39 di 99
3.3 – La Legenda La legenda si articola su 3 livelli, il primo dei quali comprende 5 voci
generali che abbracciano le maggiori categorie di copertura sul pianeta (Territori
modellati artificialmente, territori agricoli, territori boscati e ambienti semi-
naturali, zone umide, corpi idrici), il secondo 15, adatte ad una rappresentazione a
scale di 1:500.000/1.000.000 e il terzo 44, con voci più dettagliate, adatte appunto
ad una scala di 1:100.000.
La legenda, proposta come immutabile per ragioni di omogeneità a livello
europeo, può essere integrata da successivi livelli di approfondimento desiderati
dagli esecutori, i cui dati peraltro non devono figurare a livello comunitario.
Attualmente peraltro, essendosi rivelati insufficienti i contenuti per alcune
aree comunitarie, come le zone subartiche e quelle alpine, si sta esaminando,
nell’ambito del CentroTematico Europeo Land Cover (ETC-LC), alle cui attività
partecipa anche il Centro Interregionale, la possibilità di modificare il testo
attuale, con l'inserimento di voci, come ad esempio "tundra" e "taiga", al
momento non presenti.

Pagina 40 di 99
3.4 – La legenda dettagliata
1. Territori modellati artificialmente;
2. Territori agricoli
3. Territori boscati e ambienti semi – naturali
4. Zone umide
5. Corpi idrici

Pagina 41 di 99
3.5 – Territori modellati artificialmente
1.Territori modellati artificialmente
1.1. Zone urbanizzate
1.1.1. Tessuto Urbano continuo
1.1.2. Tessuto urbano discontinuo
1.2. Zone Industriali, commerciali e reti di comunicazione
1.2.1. Aree industriali o commerciali
1.2.2. Reti stradali e ferroviarie e spazi accessori
1.2.3. Aree portuali
1.2.4. Aeroporti
1.3. Zone estrattive, discariche e cantieri
1.3.1. Aree estrattive
1.3.2. Discariche
1.3.3. Cantieri
1.4. Zone verdi artificiali non agricole
1.4.1. Aree verdi urbane estrattive
1.4.2. Discariche
1.1 Zone urbanizzate
1.1.1. Tessuto Urbano continuo
Spazi strutturati dagli edifici e dalla viabilità. Gli edifici, la viabilità e le
superfici ricoperte artificialmente occupano più dell'80% della superficie totale.
La vegetazione non lineare e il suolo nudo rappresentano l'eccezione. Sono
qui compresi cimiteri senza vegetazione. Problema particolare degli abitati a
sviluppo lineare (villes - rue): anche se la larghezza delle costruzioni che
fiancheggiano la strada, compresa la strada stessa, raggiunge solo 75 m, e a

Pagina 42 di 99
condizione che la superficie totale superi i 25 ha, queste aree saranno classificate
come tessuto urbano continuo (o discontinuo se le aree non sono congiunte).
Figura 3.1 – Differenza tra la densità dei fabbricati urbani.

Pagina 43 di 99
1.1.2. Tessuto urbano discontinuo
Spazi caratterizzati dalla presenza di edifici. Gli edifici, la viabilità e le
superfici a copertura artificiale coesistono con superfici coperte da vegetazione e
con suolo nudo, che occupano in maniera discontinua aree non trascurabili. Gli
edifici, la viabilità e le superfici ricoperte artificialmente coprono dal 50 all'80%
della superficie totale. Si dovrà tenere conto di questa densità per le costruzioni
localizzate all'interno di spazi naturali (foreste o spazi erbosi).
Questa voce non comprende:
• le abitazioni agricole sparse delle periferie delle città o nelle zone di
coltura estensiva comprendenti edifici adibiti a impianti di
trasformazione e ricovero;
• le residenze secondarie disperse negli spazi naturali o agricoli.
Comprende invece:
• cimiteri senza vegetazione.
1.2 Zone industriali, commerciali e reti di comunicazione
1.2.1. Aree industriali o commerciali
Aree a copertura artificiale (in cemento, asfaltate o stabilizzate: per esempio
terra battuta), senza vegetazione, che occupano la maggior parte del terreno. (Più
del 50% della superficie).
La zona comprende anche edifici e/o aree con vegetazione. Le zone
industriali e commerciali ubicate nei tessuti urbani continui e discontinui sono da
considerare solo se si distinguono nettamente dall'abitato. (Insieme industriale di
aree superiore a 25 ha con gli spazi associati: muri di cinta, parcheggi, depositi,
ecc.). Le stazioni centrali delle città fanno parte di questa categoria, ma non i
grandi magazzini integrati in edifici di abitazione, i sanatori, gli stabilimenti
termali, gli ospedali, le case di riposo, le prigioni, ecc.

Pagina 44 di 99
Figura 3.2 – Esempio di 1.2.1. Aree industriali o commerciali
1.2.2. Reti stradali e ferroviarie e spazi accessori
Larghezza minima da considerare: 100 m.
Autostrade, ferrovie, comprese le superfici annesse (stazioni, binari,
terrapieni, ecc.) e le reti ferroviarie più larghe di 100 m che penetrano nella città.
Sono qui compresi i grandi svincoli stradali e le stazioni di smistamento, ma non
le linee elettriche ad alta tensione con vegetazione bassa che attraversano aree
forestali.
1.2.3. Aree portuali
Infrastrutture delle zone portuali compresi i binari, i cantieri navali e i porti
da diporto. Quando i moli hanno meno di 100 m., di larghezza, la superficie dei
bacini (d'acqua dolce o salata) delimitati dagli stessi è da comprendere nel calcolo
dei 25 ha.
1.2.4. Aeroporti
Infrastrutture degli aeroporti: piste, edifici e superfici associate. Sono da
considerare solo le superfici che sono interessate dall'attività aeroportuale (anche
se alcune parti di queste sono utilizzate occasionalmente per agricoltura-foraggio).
Di norma queste aree sono delimitate da recinzioni o strade. In molti casi, l'area
aeroportuale figura sulle carte topografiche a grande scala (1:25.000 e 1:50.000).
Pagina 45 di 99
Non sono compresi i piccoli aeroporti da turismo (con piste consolidate) ed edifici
di dimensioni molto piccole.
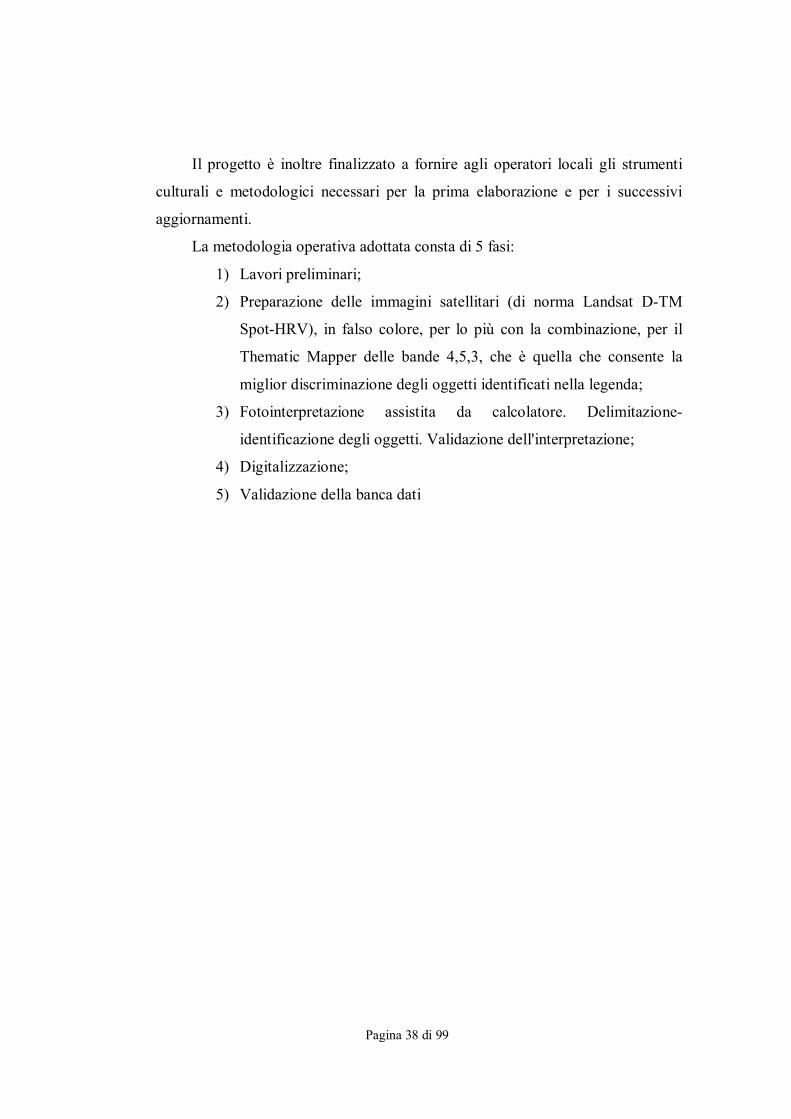
1.3 Zone estrattive, discariche e cantieri
1.3.1. Aree estrattive
Estrazione di materiali inerti a cielo aperto (cave di sabbia e di pietre) o di
altri materiali (miniere a cielo aperto).
Ne fanno parte cave di ghiaia, eccezion fatta, in ogni caso, per le estrazioni
nei letti dei fiumi. Sono qui compresi gli edifici e le installazioni industriali
associate. Rimangono escluse le cave sommerse, mentre sono comprese le
superfici abbandonate e sommerse, ma non recuperate, comprese in aree
estrattive. Le rovine, archeologiche e non, sono da includere nelle aree ricreative.
Figura 3.3 – Esempio di 1.3.1. Aree estrattive
1.3.2. Discariche
Discariche e depositi di miniere, industrie e collettività pubbliche.

Pagina 46 di 99
1.3.3. Cantieri
Spazi in costruzione, scavi e suoli rimaneggiati.
Figura 3.4 – Esempio di 1.3.3. Cantieri
1.4. Zone verdi artificiali non agricole
1.4.1. Aree verdi urbane
Spazi ricoperti di vegetazione compresi nel tessuto urbano. Ne fanno parte
cimiteri con abbondante vegetazione e parchi urbani.
1.4.2. Aree sportive e ricreative
Aree utilizzate per camping, attività sportive, parchi di divertimento, campi da
golf, ippodromi, rovine archeologiche e non, ecc. Ne fanno parte i parchi
attrezzati (aree dotate intensamente di attrezzature ricreative, da picnic, ecc.)
compresi nel tessuto urbano. N.B.: sono escluse le piste da sci, da classificare,
di norma, come 2.3. l. e 3.2.1

Pagina 47 di 99
3.6 – Territori agricoli
2.Territori agricoli
2.1. Seminativi
2.1.1. Seminativi in aree non irrigue
2.1.2. Seminativi in aree irrigue
2.1.3. Risaie
2.2. Colture permanenti
2.2.1. Vigneti
2.2.2. Frutteti e frutti minori
2.2.3. Oliveti
2.3. Prati stabili
2.3.1. Prati stabili
2.4. Zone agricole eterogenee
2.4.1. Colture annuali associate a colture permanenti
2.4.2. Sistemi colturali a particellari complessi
2.4.3. Aree prevalentemente occupate da colture agrarie con
presenza di spazi naturali (formazioni vegetali naturali,
boschi, lande, cespuglieti, bacini d’acqua, rocce nude,
ecc.) importanti
2.4.4. Aree agroforestali
2.1. Seminativi
Superfici coltivate regolarmente arate e generalmente sottoposte ad un
sistema di rotazione.
2.1.1. Seminativi in aree non irrigue

Pagina 48 di 99
Sono da considerare perimetri irrigui solo quelli individuabili per
fotointerpretazione, satellitare o aerea, per la presenza di canali e impianti di
pompaggio. Cereali, leguminose in pieno campo, colture foraggere, coltivazioni
industriali, radici commestibili e maggesi. Vi sono compresi i vivai e le colture
orticole, in pieno campo, in serra e sotto plastica, come anche gli impianti per la
produzione di piante medicinali, aromatiche e culinarie. Vi sono comprese le
colture foraggere (prati artificiali), ma non i prati stabili.
Figura 3.5 – Esempio di 2.1.1. Seminativi in aree non irrigue
2. l. 2. Seminativi in aree irrigue
Colture irrigate stabilmente e periodicamente grazie ad un'infrastruttura
permanente (canale di irrigazione, rete di drenaggio). La maggior parte di queste
colture non potrebbe realizzarsi senza l'apporto artificiale d'acqua. Non vi sono
comprese le superfici irrigate sporadicamente.
2.1.3. Risaie
Superfici utilizzate per la coltura del riso.

Pagina 49 di 99
Terreni terrazzati e dotati di canali di irrigazione. Superfici periodicamente
inondate.
2.2. Colture permanenti
Colture non soggette a rotazione che forniscono più raccolti e che occupano
il terreno per un lungo periodo prima dello scasso e della ripiantatura: si tratta per
lo più di colture legnose. Sono esclusi i prati, i pascoli e le foreste.
2.2. l. Vigneti
Superfici piantate a vigna
2.2.2. Frutteti e frutti minori
Impianti di alberi o arbusti fruttiferi: colture pure o miste di specie
produttrici di frutta o alberi da frutto in associazione con superfici stabilmente
erbate. Ne fanno parte i castagneti da frutto e i noccioleti. I frutteti di meno di 25
ha compresi nei terreni agricoli (prati stabili o seminativi) ritenuti importanti sono
da comprendere nella classe 2.4.2.. I frutteti con presenza di diverse associazioni
di alberi sono da includere in questa classe.
2.2.3. Oliveti
Superfici piantate ad olivo, comprese particelle a coltura mista di olivo e
vite.
2.3. Prati stabili
2.3. l. Prati stabili
Superfici a copertura erbacea densa a composizione floristica rappresentata
principalmente da graminacee, non soggette a rotazione. Sono per lo più pascolate
ma il foraggio può essere raccolto meccanicamente. Ne fanno parte i prati
permanenti e temporanei e le marcite. Sono comprese inoltre aree con siepi. Le

Pagina 50 di 99
colture foraggere (prati artificiali inclusi in brevi rotazioni) sono da classificare
come seminativi (2. l. 1).
Figura 3.6 – Esempio di 2.3.1. prati stabili
2.4. Zone agricole eterogenee
2.4. l. Colture annuali associate a colture permanenti
Colture temporanee (seminativi o prati) in associazione con colture
permanenti sulla stessa superficie, quando le particelle a frutteto comprese nelle
colture annuali non associate rappresentano meno del 25% della superficie totale.

Pagina 51 di 99
Figura 3.7 – Esempio
di 2.4. l. Colture
annuali associate a
colture permanenti
2.4.2. Sistemi colturali e particellari complessi
Mosaico di piccoli appezzamenti con varie colture annuali, prati stabili e
colture permanenti, occupanti ciascuno meno del 75% della superficie totale
dell'unità.
Vi sono compresi gli "orti per pensionati" e simili.. Eventuali "lotti"
superanti i 25 ha sono da includere nelle zone agricole.
Figura 3.8 –
Esempio di 2.4. 2.
Sistemi colturali e
particellari
complessi

Pagina 52 di 99
2.4.3. Aree prevalentemente occupate da colture agrarie con presenza di
spazi naturali (formazioni vegetali naturali,boschi, lande, cespuglieti, bacini
d'acqua, rocce nude, ecc.) importanti
Le colture agrarie occupano più del 25 e meno del 75% della superficie
totale dell'unità.
Figura 3.9 – Esempio di 2.4.3. Aree prevalentemente occupate da colture agrarie con
presenza di spazi naturali
2.4.4. Aree agroforestali
Colture annuali o pascolo sotto copertura arborea composta da specie
forestali.

Pagina 53 di 99
3.7 – Territori boscati e ambienti semi – naturali
3.Territori boscati e ambienti semi – naturali
3.1. Zone boscate
3.1.1. Boschi di latifoglie
3.1.2. Boschi di conifere
3.1.3. Boschi misti
3.2. Zone caratterizzate da vegetazione arbustiva e / o erbacea
3.2.1. Aree a pascolo naturale e praterie d’alta quota
3.2.2. Brughiere e cespuglieti
3.2.3. Aree a vegetazione sclerofilla
3.2.4. Area a vegetazione boschiva ed arbustiva in evoluzione
3.3. Zone aperte con vegetazione rada od assente
3.3.1. Spiagge, dune, sabbie (più larghe di 100 m)
3.3.2. Rocce nude, falesie, rupi, affioramenti
3.3.3. Area con vegetazione rada
3.3.4. Area percorsa da incendi
3.3.5. Ghiacciai e nevi perenni
3.1. Zone boscate
3.1.1. Boschi di latifoglie
Formazioni vegetali, costituite principalmente da alberi ma anche da
cespugli e arbusti, nelle quali dominano le specie forestali a latifoglie. La
superficie a latifoglie deve coprire almeno il 75% dell'unità, altrimenti è da
classificare bosco misto.
N.B.: vi sono compresi i pioppeti e gli eucalipteti.

Pagina 54 di 99
3.1.2. Boschi di conifere
Formazioni vegetali costituite principalmente da alberi ma anche da cespugli
e arbusti, nelle quali dominano le specie forestali conifere. La superficie a
conifere deve coprire almeno il 75% dell'unità, altrimenti è da classificare bosco
misto. N.B.: vi sono comprese le conifere a rapido accrescimento.
3.1.3. Boschi misti
Formazioni vegetali, costituite principalmente da alberi ma anche da
cespugli ed arbusti, dove non dominano né le latifoglie, né le conifere.
3.2. Zone caratterizzate da vegetazione arbustiva e/o erbacea
3.2.1. Aree a pascolo naturale e praterie d'alta quota
Aree foraggere a bassa produttività. Sono spesso situate in zone accidentate.
Interessano spesso superfici rocciose, roveti e arbusteti. Sulle aree interessate
dalla classe non sono di norma presenti limiti di particelle (siepi, muri, recinti).
3.2.2. Brughiere e cespuglieti
Formazioni vegetali basse e chiuse, composte principalmente di cespugli,
arbusti e piante erbacee (eriche, rovi, ginestre dei vari tipi ecc.). Vi sono comprese
le formazioni a pino mugo.
3.2.3. Aree a vegetazione sclerofilla
Ne fanno parte macchie e garighe. Macchie: associazioni vegetali dense
composte da numerose specie arbustive miste su terreni silicei acidi in ambiente
mediterraneo. Garighe: associazioni cespugliose discontinue delle piattaforme
calcaree mediterranee. Sono spesso composte da quercia coccifera, corbezzolo,
lavanda, timo, cisto bianco, ecc. Possono essere presenti rari alberi isolati.
Pagina 55 di 99
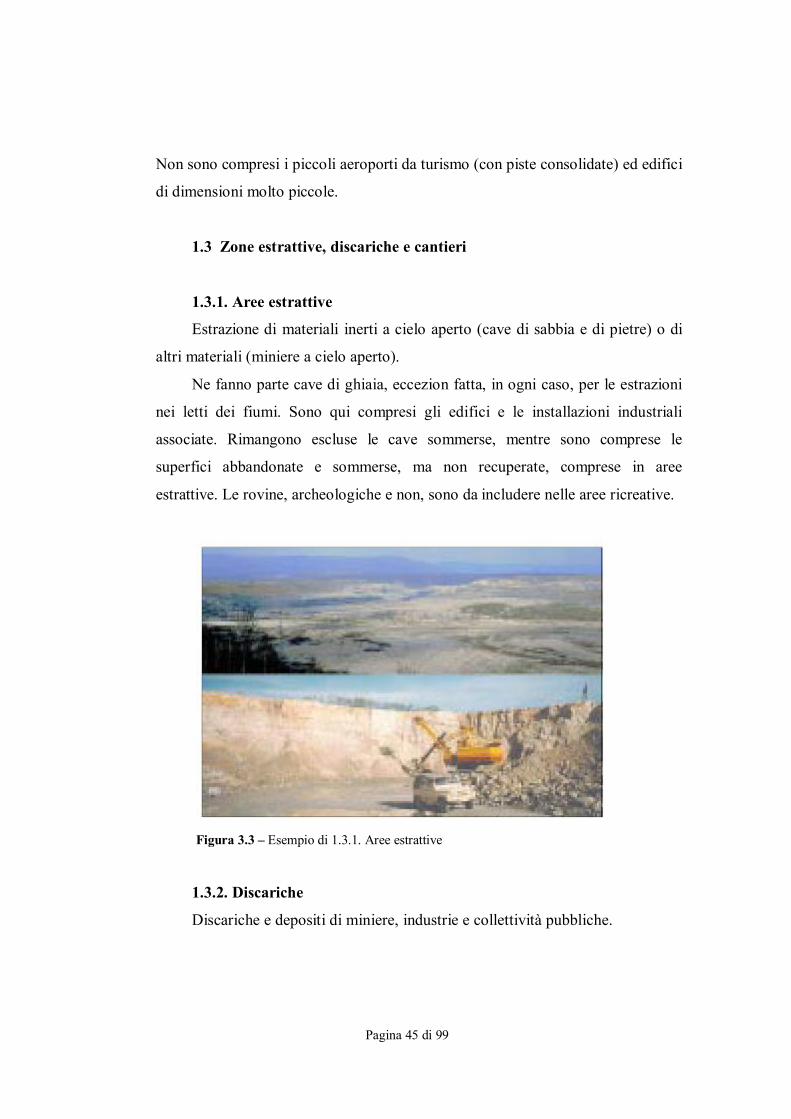
3.2.4. Aree a vegetazione boschiva e arbustiva in evoluzione
Vegetazione arbustiva o erbacea con alberi sparsi. Formazioni che possono
derivare dalla degradazione della foresta o da una rinnovazione della stessa per
ricolonizzazione di aree non forestali.
Figura 3.10 – Esempio di 3.2.4. Aree a vegetazione boschiva e arbustiva in evoluzione
3.3. Zone aperte con vegetazione rada o assente
3.3.1. Spiagge, dune, sabbie (più larghe di 100 m)
Le spiagge, le dune e le distese di sabbia e di ciottoli di ambienti litorali e
continentali, compresi i letti sassosi dei corsi d'acqua a regime torrentizio. Le
dune ricoperte di vegetazione (erbacea o legnosa) devono essere classificate nelle
voci corrispondenti: boschi (3.1.1., 3.1.2. e 3.1.3.), prati (2.3. 1.) o aree a pascolo
naturale (3.2. 1.)
3.3.2. Rocce nude, falesie, rupi, affioramenti
3.3.3. Aree con vegetazione rada
Comprende le steppe xerofile, le steppe alofile, le tundre e le aree
calanchive in senso lato.
Pagina 56 di 99
3.3.4. Aree percorse da incendi
Superfici interessate da incendi recenti. I materiali carbonizzati sono ancora
presenti.
3.3.5. Ghiacciai e nevi perenni
Superfici coperte da ghiacciai o da nevi perenni.

Pagina 57 di 99
3.8 –Zone umide
4.Zone umide
4.1. Zone umide interne
4.1.1. Paludi interne
4.1.2. Torbiere
4.2. Zone umide marittime
4.2.1. Paludi salmastre
4.2.2. Zone intertidali
4.1. Zone umide interne
Zone non boscate, parzialmente, temporaneamente o permanentemente
saturate da acqua stagnante o corrente.
4.1.1. Paludi interne
Terre basse generalmente inondate in inverno e più o meno saturate d'acqua
durante tutte le stagioni.
Figura 3.11 – Esempio di 4.1.1. Paludi interne

Pagina 58 di 99
4.1.2. Torbiere
Terreni spugnosi umidi nei quali il suolo è costituito principalmente da
muschi e materiali vegetali decomposti. Torbiere utilizzate o meno.
4.2. Zone umide marittime
Zone non boscate, saturate parzialmente, temporaneamente o in permanenza
da acqua salmastra o salata.
4.2.1. Paludi salmastre
Terre basse con vegetazione, situate al di sotto del livello di alta marea,
suscettibili pertanto di inondazione da parte delle acque del mare. Spesso in via di
riempimento, colonizzate a poco a poco da piante alofile.
Figura 3.12 – Esempio di 4.2.1. Paludi salmastre
4.2.2. Saline
Saline attive o in via di abbandono.
Parti di paludi salmastre utilizzate per la produzione di sale per
evaporazione. Sono nettamente distinguibili dal resto delle paludi per la forma
regolare delle particelle e il loro sistema di argini.

Pagina 59 di 99
4.2.3. Zone intertidali
Superfici limose, sabbiose o rocciose generalmente prive di vegetazione
comprese fra il livello delle alte e basse maree.
Figura 3.13 – Esempio di
4.2.3. Zone intertidali

Pagina 60 di 99
3.9 – Corpi idrici
5. Corpi idrici
5.1. Acque continentali
5.1.1. Corsi d’acqua, canali ed idrovie
5.1.2. Bacini d’acqua
5.2. Acque marittime
5.2.1. Lagune
5.2.2. Estuari
5.2.3. Mari ed oceani
5.1. Acque continentali
5.1.1. Corsi d'acqua, canali e idrovie
Corsi di acqua naturali o artificiali che servono per il deflusso delle acque.
Larghezza minima da considerare: 100 m
5.1.2. Bacini d'acqua
Superfici naturali o artificiali coperte da acque.
Figura 3.14 –
Esempio di 5.1.2.
Bacini d'acqua

Pagina 61 di 99
5.2. Acque marittime
5.2. 1. Lagune
Aree coperte da acque salate o salmastre, separate dal mare da barre di terra
o altri elementi topografici simili. Queste superfici idriche possono essere messe
in comunicazione con il mare in certi punti particolari, permanentemente o
periodicamente.
5.2.2. Estuari
Parte terminale dei fiumi, alla foce, che subisce l'influenza delle acque.
Figura 3.15 – Esempio di 5.2.2. Estuari
5.2.3. Mari e oceani
Aree al di là del limite delle maree più basse.

Pagina 62 di 99
Capitolo 4: Area di studio
4.1 – Introduzione L’area di studio, riportata in fig. 4.1, è costituita dalla Alta Val d’Agri,
porzione del bacino della Val d’Agri, compresa tra latitudine 40° 30’ 11” Nord,
longitudine 15° 40’ 02” Ovest e 40° 11’ 47” latitudine Sud 16° 07’ 18”
longitudine Est, per una estensione totale di circa 131.000 ha.
Fig. 4.1 – Area di studio: Il reticolo geografico ben evidenzia l’estensione dell’area. Visibile
la Diga del Pertusillo con a monte il suo invaso delimitato da una intensa vegetazione
La Val d'Agri si estende entro la Provincia di Potenza, nella porzione sud-
occidentale della Basilicata, per circa 1122,8 km2, nel cuore dell'Appennino

Pagina 63 di 99
Lucano in direzione nord ovest-sud est. Le valli così orientate, scavate fra le
grandi dorsali calcaree, sono tipiche della parte occidentale della Basilicata. Dal
punto di vista geologico siamo di fronte ad una notevole varietà di elementi: ai
calcarei dolomitici del Mesozoico, dei quali sono composti i principali rilievi,
s'affiancano i depositi lacustri del periodo pleistocenico. In quest'era geologica -
di controversa datazione, ma che ha il suo limite estremo in circa 10.000 anni fa -
tutta la zona era occupata da un vasto lago, alimentato dagli attuali affluenti
dell'Agri.
Oggi è il fondovalle ad essere invaso dalle acque di questo fiume di 136
chilometri di lunghezza che ha le sorgenti sulle falde meridionali del monte
Maruggio e alle pendici occidentali del monte Volturino e sfocia in mare nel
Golfo di Taranto, presso Policoro. L'Agri, al contrario di altri fiumi lucani,
presenta un corso regolare non soggetto a piene improvvise.
Forse questa sua qualità è all'origine del nome: Agri viene infatti collegato
all'aggettivo "akìros" che significa "lento e tardo, senza moto". Lo sbarramento
realizzato all'altezza di Spinoso - mediante la realizzazione di un'imponente diga
di 100 metri d'altezza e 380 di lunghezza - ha fatto nascere il lago artificiale della
Pietra del Pertusillo, un invaso della capacità di 155 milioni di metri cubi d'acqua.
Se è il corso dell'Agri a caratterizzare il fondo della vallata, sono le vette dei
monti a fare da guardiano e delimitare la Val d'Agri, con il massiccio del
Volturino, il monte di Viggiano, il monte Raparo e il monte Sirino.
I centri abitati sono collocati sulla sommità delle colline poste lungo il corso
del fiume Agri. La popolazione dell’area ammonta a circa 50.000 abitanti
distribuiti in 19 comuni, figura 4.2.
Per l’Alta Val d’Agri:
Grumento Nova, Marsiconuovo, Marsico Vetere, Montemurro,
Moliterno, Paterno, S.Chirico Raparo, San Martino d’Agri, Sarconi,
Spinoso, Tramutola, Viggiano;
per la Media Valle dell’Agri:
Armento, Gallicchio, Missanello, Roccanova, SantArcangelo;
Pagina 64 di 99
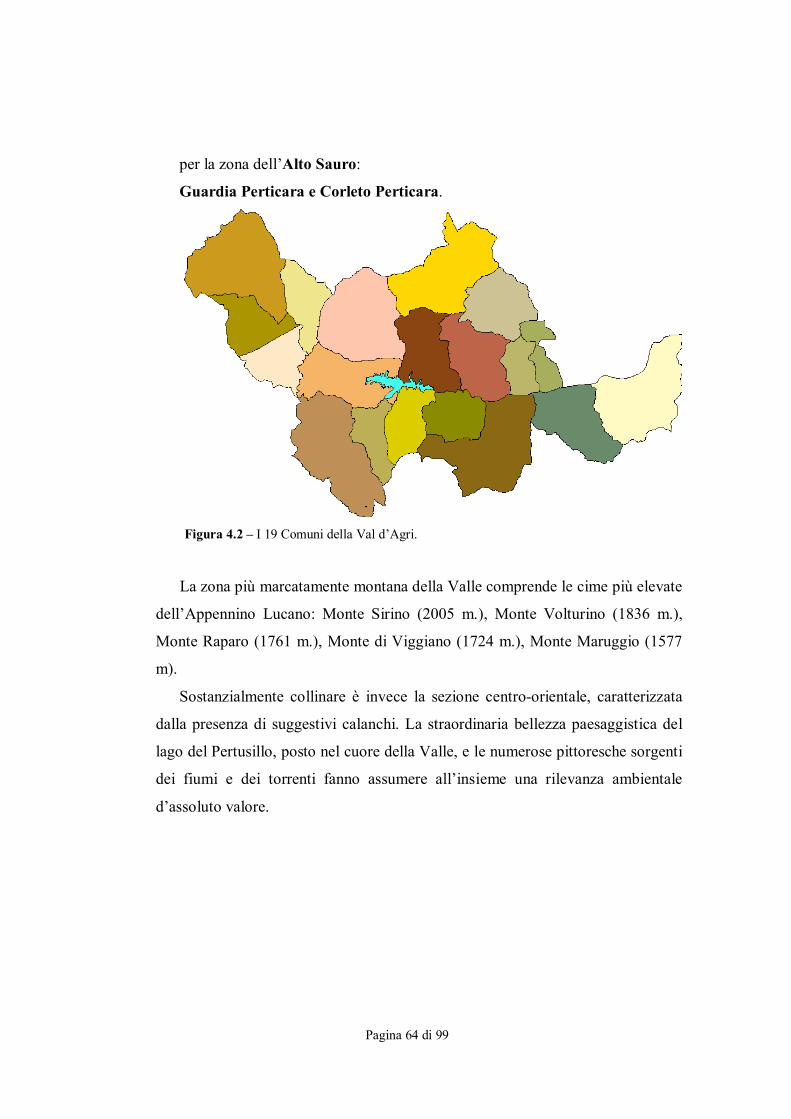
per la zona dell’Alto Sauro:
Guardia Perticara e Corleto Perticara.
Figura 4.2 – I 19 Comuni della Val d’Agri.
La zona più marcatamente montana della Valle comprende le cime più elevate
dell’Appennino Lucano: Monte Sirino (2005 m.), Monte Volturino (1836 m.),
Monte Raparo (1761 m.), Monte di Viggiano (1724 m.), Monte Maruggio (1577
m).
Sostanzialmente collinare è invece la sezione centro-orientale, caratterizzata
dalla presenza di suggestivi calanchi. La straordinaria bellezza paesaggistica del
lago del Pertusillo, posto nel cuore della Valle, e le numerose pittoresche sorgenti
dei fiumi e dei torrenti fanno assumere all’insieme una rilevanza ambientale
d’assoluto valore.

Pagina 65 di 99
4.2 – La banca dati I dati utilizzati per questo studio sono provenienti da differenti sorgenti e
tecnologie e coprono un ampio intervallo temporale, si va infatti dal 1984 al 2001,
periodo entro cui le zone antropiche quali in particolar modo quelle urbane ed
industriali, sono mutate.
La banca dati è la seguente:
Ø dati da aereo
§ Ortofoto volo Italia 1997
Ø dati da satellite
§ Landsat 5 di data 19/05/1984
§ Landsat 5 di data 18/07/1994
§ Landsat 5 di data 13/07/1998
§ Landsat 7 ETM di data 26/09/1999
§ Landsat 7 ETM di data 30/08/2001
§ Spot di data 15/10/2001
Ø cartografia IGMI
§ fogli 1:50.000.

Pagina 66 di 99
4.3 – Utilizzo della banca dati Dall’elenco della banca dati, si evince che la immagini in nostro possesso
coprono un periodo stagionale annuo compreso tra il mese di maggio (immagine
Landsat del 19/05/1985) ed il mese di ottobre (immagine Spot del 15/10/2001).
La realizzazione di una carta di uso del suolo non necessita di acquisizioni
effettuate durante il periodo autunnale – invernale, dove l’eccessiva piovosità e la
parziale copertura nuvolosa, mal influenzerebbero la discriminazione a terra.
I sensori montati sui satelliti Landsat e Spot, sono sensori passivi, pertanto, in
presenza di giornate nuvolose, parzialmente nuvolose o con umidità a terra
provocata dal naturale accumulo dell’acqua nel terreno e da banchi di nebbia o
foschia, registrerebbero tali fenomeni atmosferici e li riporterebbero
sull’immagine. Se si volesse definire l’estensione di un ghiacciaio perenne, per
quanto non ricadente nel nostro caso, proprio per la sua definizione intrinseca, si
analizzerebbero immagini relative al periodo estivo o al massimo di inizio
autunno, quando le nevi ed il ghiaccio circostanti si sono completamente ritirati
ed i confini risultano ben marcati.
L’uso di immagini ricadenti in un periodo di acquisizione primaverile – estivo
diventa una necessità ed una procedura ad oggi ampliamente usata.

Pagina 67 di 99
4.3.1 – Utilizzo dell’immagine Landsat del 30/08/01 e
dell’immagine Spot del 15/10/01 Da un immediato confronto temporale si nota la vicinanza di date tra
l’immagine Landsat del 30/08/01 e l’immagine Spot del 15/10/01.
Il periodo finale dell’estate è quello di massima aridità, provocata da scarsa o
quasi nulla piovosità, massima presa dalle fonti idriche e temperature elevate. I
raccolti sono stati del tutto ultimati, nei terreni restano le stoppie e molti
appezzamenti sono stati arati, facendo affiorare la nuda terra. Nei terreni non
coltivati di media – bassa quota la vegetazione selvatica è quasi del tutto secca. I
bacini idrici non ricevono ricarica da parecchio tempo, sono stati ampliamente
usati per scopi potabili ed irrigui, sono quindi ai minimi stagionali, si sono ritirati,
facendo affiorare ampie zone di territorio, precedentemente sommersi. Elemento
immutato in questo periodo è rappresentato dai sempreverdi, anche loro hanno
perso vigore e tono, ma restano sempre ben identificabili. Anche l’urbano è
immutato, purtroppo l’eccessiva solarità confonde le ampie zone cementificate
con il semplice terreno nudo.
Pertanto, queste immagini Landsat e Spot ben si prestano per la
classificazione di sempreverdi, e con riferimento al sistema Corine, al livello 3.1.
Zone Boscate:
3.1.1. Boschi di latifoglie;
3.1.2. Boschi di conifere.
L’interpretazione delle diverse classi di uso del suolo è stata derivata
dall’osservazione delle immagini con opportune combinazioni di bande.

Pagina 68 di 99
4.3.1.1 – Utilizzo dei dati Landsat L’uso dei dati Landsat multispettrali nell’uso del suolo, nella pianificazione
del territorio e quindi nella cartografia tematica, deriva dalla possibilità di
disporre di ben 7 bande, di cui 3 nel visibile e 4 nell’infrarosso. L’importanza
dell’utilizzo di più bande è evidente nell’esempio di figura 4.3, dove tre terreni
diversi (A, B e C) presentano caratteristiche comuni nei punti di incrocio dei
diagrammi, i cui valori letti individualmente porterebbero ad errori.
Figura 4.3 – Lo spettro di tre terreni differenti (Landcover A, B e C) in relazione alle bande
TM
Le caratteristiche spettrali delle varie bande, con le relative applicazioni sono:
- banda 1 - blu (0,450 – 0,515): indicata per lo studio delle zone costruite,
permette di discriminare le conifere dalle latifoglie;
- banda 2 – verde (0,520 – 0,600): utilizzata per misurare lo stato di vigore
della vegetazione;
- banda 3 – rosso (0,630 – 0,690): importante per discriminare e
diversificare le classi di vegetazione, le diverse intensità di rosso danno la
misura dell’assorbimento della clorofilla che caratterizza le varie specie;

Pagina 69 di 99
- banda 4 – infrarosso (0,760 – 0,900): utilizzata per lo studio della
biomassa, è assorbita completamente dall’acqua, adatta a delimitare le
masse d’acqua e la distribuzione del reticolo idrografico;
- banda 5 – infrarosso (1,550 – 1,750): permette di individuare il
contenuto di umidità del manto fogliare e quindi serve a rilevare la siccità
dei raccolti, inoltre discrimina le nuvole dal manto nevoso (riflette ed
appare chiaro a differenza delle nuvole);
- banda 6 – infrarosso termico (10,4 – 12,5): determina le zone soggette a
stress vegetativo, in questa banda si misura l’emissività e la temperatura,
si utilizza per studi sulla geotermica e sulla inerzia termica;
- banda 7 – infrarosso termico (2,080 – 2,350): indicata per la
classificazione dei litotipi e per l’assorbimento dell’acqua.

Pagina 70 di 99
Un primo confronto diretto tra le due immagini riguarda lo Spectral Range
delle bande utilizzante. La combinazione ritenuta idonea per la classificazione dei
territori boscati è la 432 per le immagini Landsat e Green Red Near infrared per
lo Spot, come mostrato in Figura 4.4.
Figura 4.4 – Immagine Landsat, bande 432 (sinistra) e immagine Spot in bande equivalenti.
Evidente la differente risoluzione spaziale.
Le due immagini sono simili: la vegetazione assume tonalità principalmente di
rosso acceso, l’immagine con risoluzione maggiore fornisce indubbiamente
particolari più marcati. Le bande così caricate accorpano in un solo colore tutte le
zone boscate, non permettendone una discriminazione agevole e semplificata.
La tabella 4.1 ben evidenzia il confronto in termini di Spectral Range: I due
sensori, per quanto differenti hanno valori medi spettrali di 4 bande vicini,
caricando opportunamente le bande nella rappresentazione RGB il risultato
ottenuto è confrontabile.

Pagina 71 di 99
Landsat Spot Band Name Spectral Range Media Band Name Spectral Range Media 1 0.450 – 0.515 0.4825 blue 2 0.525 – 0.605 0.565 green 0.500 – 0.590 0.545 3 0.630 – 0.690 0.660 red 0.610 – 0.680 0.645 4 0.750 – 0.900 0.825 near infrared 0.790 – 0.890 0.840 5 1.550 – 1.750 1.650 infrared 1.580 – 1.750 1.665 6 10.400 – 12.500 11.450 7 2.090 – 2.350 2.220 Tabella 4.1 – Confronto tra bande Landsat e Spot. In colore giallo i valori confrontabili

Pagina 72 di 99
4.3.1.2 – Criterio usato: Rapporto tra bande Questo metodo serve per ovviare alle limitazioni dell’utilizzo di fasce spettrali
relativamente vaste nei dati Landsat. Usando il rapporto tra bande si riescono ad
evidenziare essenzialmente le seguenti caratteristiche:
- Rapporto 3/4: per definire le terre sterili e l’area urbana;
- Rapporto 4/3: per distinguere la vegetazione, l’acqua e le terre da
raccolto, aumentando il contrasto tra vegetazione e terre sterili. La
vegetazione ha un’alta riflessione nella fascia 4 (0,750 – 0,900) e un alto
assorbimento nella banda 3 (0,630 – 0,690). Questo rapporto definisce
unicamente la distribuzione della vegetazione, maggiore è il tono acceso,
maggiore è la presenza di vegetazione. Inoltre è possibile ben distinguere
le strade all’interno di essa.
- Rapporto 2/3: per una netta distinzione tra le terre coltivate e quelli
sterili. Non ha però distinto tra loro le terre coltivate, i boschi e l’acqua,
infatti appaiono in tono chiaro, la vegetazione in un tono più alto e le terre
non coltivate sono di colore scuro. La clorofilla ha una forte riflessione
nella banda 2 (0,520 – 0,600) ed un forte assorbimento nella banda 3
(0,630 – 0,690);
- Rapporto 3/2: Per separare le foreste e le terre coltivate. La banda 3
(0,630 – 0,690) è la fascia rossa di assorbimento della vegetazione verde e
sana, la banda 2 (0,520 – 0,690) la fascia di riflessione della superficie
della foglia. Può essere utile a discriminare i vari tipi di vegetazione. Le
terre coltivate sono di tono chiaro (luminose) e i boschi sono di tono più
scuro;
- Rapporto 4/5: Aumenta il tono dell’acqua, la vegetazione e la presenza
del tenore di umidità nelle terre coltivate. L’acqua appare con tono scuro e
la vegetazione più chiara. Poiché l’acqua ha un alto assorbimento nella
banda 4 (0,750 – 0,900) ed una forte riflessione nella fascia 5 (1,550 –
1,750), può essere utile per discriminare i corpi d’acqua dalle terre;
Pagina 73 di 99
- Rapporto 5/4: Separa il corpo d’acqua dai boschi, dalle terre sterili e dalla
vegetazione. In questo rapporto l’acqua appare di tono scuro, leggermente
più chiari i boschi, invece le terre coltivate e no esibiscono tono più
luminoso.
- Rapporto 3/5: evidenzia le terre aride, le strade principali, le vie
all’interno delle aree urbane e le zone cementate. Utile per osservare la
differenza tra l’acqua limpida e quella torbida. L’acqua limpida risulta la
più chiara, gli spazi urbani ed edificati, le strade principali sono
leggermente più scuro, i boschi e le terre coltivate appaiono di colore
scuro;
- Rapporto 7/2: separa i boschi (scuri) dalle terre coltivate, separa le strade
principali, le aree urbane e gli spazi edificati, tutte risultano di colore
chiaro, ad eccezione dell’acqua di colore scuro, simile ai boschi;
- Rapporto 7/5: unicamente per separare il terreno dall’acqua. I terreni
hanno un forte assorbimento nella banda 7 (2,080 – 2,350) ed un’alta
riflessione nella banda 5 (1,550 – 1,750), il terreno è visualizzato come
tono chiaro, e l’acqua come tono scuro;
Generando successivamente un Color – Ratio – Composite (CRC) usando i
rapporti di banda precedentemente creati è possibile visualizzare ulteriore
informazioni.
- Banda 7/5 nel rosso, 4/3 nel verde e 3/2 nel blu: Questa composizione di
colore ha rilevato il corpo dell’acqua, i boschi, le terre coltivate, le terre
aride ed i terreni umidi;
- Banda 4/3 nel rosso, 3/2 nel verde e 3/4 nel blu: con questa
combinazione di colori, l’azzurro ha rilevato l’acqua, i boschi e le terre
coltivate delineati dal rosso;
- Banda 3/2 nel rosso, 5/3 nel verde e 5/6 nel blu: il colore bluastro –
verde ha rilevato l’acqua, i boschi e le terre coltivate.

Pagina 74 di 99
- Banda 7/5 nel rosso, 3/5 nel verde e 2/3 nel blu: il corpo dell’acqua è
apparso di colore bianco, i boschi di conifere sono stati separati da quelli
di latifoglie (Figura 4.5).
Utilizzando proprio quest’ultimo rapporto di bande abbiamo ottenuto il
risultato cercato: la netta distinzione tra conifere (di un acceso colore celeste) e
latifoglie (visibili in colore blue) da tutto il verde presente nell’area, agevolandone
la classificazione.
Il rapporto di bande presuppone la possibilità di disporre di un numero di
bande pari almeno al doppio di quelle caricate in CRC e quindi nel caso di RGB
di almeno 6 bande. Tale requisito è ampliamente soddisfatto nel caso di utilizzo di
immagini Landsat.
Pertanto, dal confronto diretto tra Landsat e Spot, per ciò che riguarda
l’estrazione di classi di sempreverdi, ne il primo è più indicato ad evidenziare tale
categoria.
Figura 4.5 – Confronto tra bande Landsat. A sinistra 432 e a destra 7/5 3/5 2/3
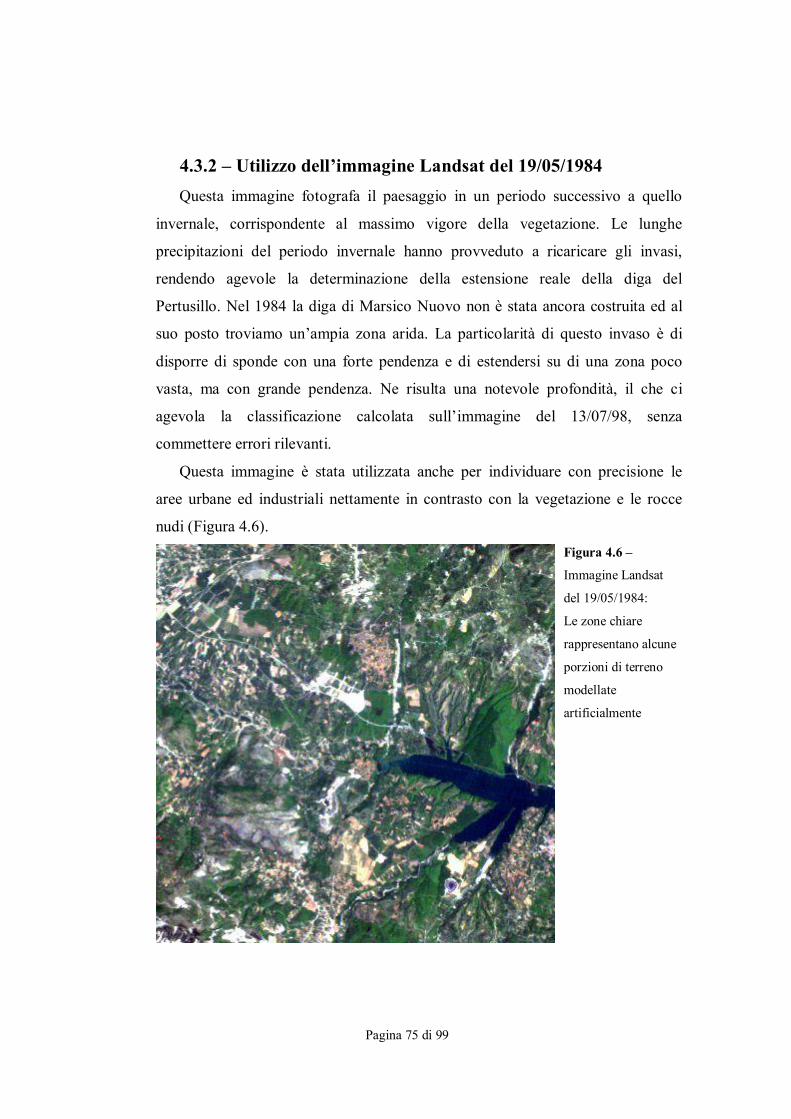
Pagina 75 di 99
4.3.2 – Utilizzo dell’immagine Landsat del 19/05/1984 Questa immagine fotografa il paesaggio in un periodo successivo a quello
invernale, corrispondente al massimo vigore della vegetazione. Le lunghe
precipitazioni del periodo invernale hanno provveduto a ricaricare gli invasi,
rendendo agevole la determinazione della estensione reale della diga del
Pertusillo. Nel 1984 la diga di Marsico Nuovo non è stata ancora costruita ed al
suo posto troviamo un’ampia zona arida. La particolarità di questo invaso è di
disporre di sponde con una forte pendenza e di estendersi su di una zona poco
vasta, ma con grande pendenza. Ne risulta una notevole profondità, il che ci
agevola la classificazione calcolata sull’immagine del 13/07/98, senza
commettere errori rilevanti.
Questa immagine è stata utilizzata anche per individuare con precisione le
aree urbane ed industriali nettamente in contrasto con la vegetazione e le rocce
nudi (Figura 4.6).
Figura 4.6 –
Immagine Landsat
del 19/05/1984:
Le zone chiare
rappresentano alcune
porzioni di terreno
modellate
artificialmente

Pagina 76 di 99
4.3.3 – Utilizzo dell’immagine Landsat del 18/07/1994 e del
13/07/1998 Il successivo confronto si nota tra le immagini del mese di luglio in nostro
possesso. La scelta ricade quasi ovviamente su l’immagine del 1998 (Figura 4.7),
è la più recente e si avvicina anche maggiormente alla prima decade di luglio,
periodo in cui la nostra classificazione risulta agevolata.
Figura 4.7 – Immagine Landsat del 13/07/1998
L’immagine del 13/07/1998 è la più ricca di informazioni, utile per la
discriminazione di varie colture e seminativi. L’opportuno confronto tra questa
immagine e le altre, ci permette di completare la classificazione.

Pagina 77 di 99
4.3.4 – Ricapitolo sulle classi ricavate da ciascuna immagine Le classi ottenute sono in totale 14, lo stesso numero presente nel progetto
Corine, ed in particolare
Classi ricavate dall’immagine del 19/05/1984:
1.1.1. Urbano continuo;
1.2.1. Aree industriali o commerciali;
1.3.1. Aree estrattive;
3.3.2. Rocce nude, falesie, rupi, affioramenti;
5.1.2. Bacini d’acqua.
Classi ricavate dall’immagine del 30/08/2001:
3.1.1. Boschi di latifoglie;
3.1.2. Boschi di conifere;
1.2.4. Aeroporti.
Classi ricavate dall’immagine del 13/07/1998:
2.1.1. Seminativi in aree non irrigue;
2.4.1. Colture annuali associate a colture permanenti;
2.4.2. Sistemi colturali e particellari complessi;
2.4.3. Aree prevalentemente occupate da colture agrarie con
presenza di spazi naturali;
3.2.1. Aree a pascolo naturale e praterie d’alta quota;
3.2.4. Aree a vegetazione boschiva e arbustiva in evoluzione.
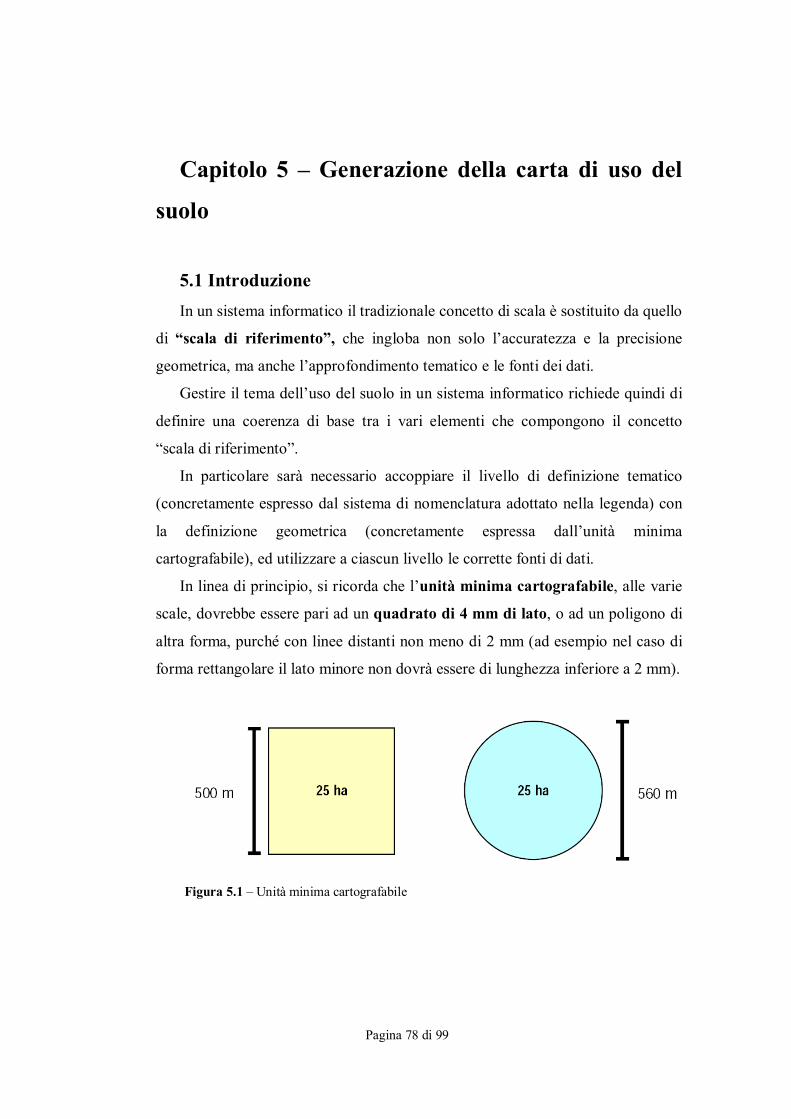
Pagina 78 di 99
Capitolo 5 – Generazione della carta di uso del
suolo
5.1 Introduzione In un sistema informatico il tradizionale concetto di scala è sostituito da quello
di “scala di riferimento”, che ingloba non solo l’accuratezza e la precisione
geometrica, ma anche l’approfondimento tematico e le fonti dei dati.
Gestire il tema dell’uso del suolo in un sistema informatico richiede quindi di
definire una coerenza di base tra i vari elementi che compongono il concetto
“scala di riferimento”.
In particolare sarà necessario accoppiare il livello di definizione tematico
(concretamente espresso dal sistema di nomenclatura adottato nella legenda) con
la definizione geometrica (concretamente espressa dall’unità minima
cartografabile), ed utilizzare a ciascun livello le corrette fonti di dati.
In linea di principio, si ricorda che l’unità minima cartografabile, alle varie
scale, dovrebbe essere pari ad un quadrato di 4 mm di lato, o ad un poligono di
altra forma, purché con linee distanti non meno di 2 mm (ad esempio nel caso di
forma rettangolare il lato minore non dovrà essere di lunghezza inferiore a 2 mm).
Figura 5.1 – Unità minima cartografabile

Pagina 79 di 99
5.2 – Cartografia in scala 1:250.000 – 1:100.000 Il supporto da utilizzare per la realizzazione di una cartografia in questa scala,
prevede l’impiego di immagini Landsat e Spot con risoluzione di 30 e 20 metri,
supportate dall’interpretazione a video di foto aeree.
Pertanto l’unità minima cartografabile da utilizzare in queste scale è quella
indicata in tabella 5.1, da cui si evince che non ha senso usare una legenda di
grandissimo dettaglio per queste scale di riferimento.
Scala Livello nomenclatura
Corine
Unità minima
cartografabile Supporti
1:250.000 Terzo 50 – 25 ha Immagini Landsat
1:100.000 Terzo 25 – 16 ha Immagini Landsat e Spot, volo
aereo minimo 1:50.000
1:50.000 Terzo 4 ha
Immagini Spot / Landsat
ricampionate a 10 m
Volo aereo minimo 1:25.000
1:25.000 Quarto 1 – 2 ha
Immagini Spot ricampionate a
10 m, Volo aereo minimo
1:25.000
1:10.000 Quarto / quinto 0,5 ha
Volo aereo minimo 1:20.000
Immagini Ikonos,
Rilevamenti sul campo
Tabella 5.1
In base alle diverse scale di restituzione di cartografia tematica vettoriale, si
indicano:
§ Cartografia in scala 1: 250.000 – 100.000 (livello di
riconoscimento);
§ Cartografia in scala 1: 50.000 – 25.000 (livello di semidettaglio);
§ Cartografia in scala 1: 10.000 (livello di dettaglio);

Pagina 80 di 99
5.3 – Considerazione generali sulla generalizzazione delle
mappe La produzione di cartografie è legata alla ricerca ed implementazione di dati
necessari al raggiungimento dell’obiettivo prefissato, utilizzando generalmente
dei software grafici. Questo genere di procedura porta inevitabilmente alla
produzione di semplificazioni ed errori.
Il voler automatizzare la procedure di generalizzazione delle mappe,
attraverso l’applicazione di algoritmi è dettato dall’esigenza di ridurre al minimo
l’intervento del digitalizzatore in un processo estremamente noioso e lungo che
porta inevitabilmente alla produzione di errori
Il processo di generalizzazione consta fondamentalmente di tre passi:
1) analisi;
2) sintesi;
3) valutazione.
È necessario stabilire un metodo di analisi del contenuto della mappa e di
valutare la struttura esistente fra gli elementi geografici; data l’analisi, sarà poi
possibile stabilire un metodo di generalizzazione (sintesi) che dia la possibilità di
manipolare gli oggetti all’interno della carta, al fine di determinare soluzioni ad
hoc, al fine di garantire una coerenza fra i dati di origine e quelli di sintesi,
bisognerà testare i risultati attraverso una fase di valutazione.
La necessità di diminuire il numero di punti che formano un arco deriva
dall’esigenza di dover garantire leggibilità alla mappa, infatti avere un arco
composto da un elevato numero di punti ha senso ad una scala di rappresentazione
elevata, ma ad una scala a minor grado di dettaglio, genera esclusivamente
confusione nella lettura, aumentando il “rumore” dei dati.
Lo stesso discorso si applica per la semplificazione di elementi poligonali. In
questo caso però si determina un’ulteriore complicazione: se il poligono risulta
essere inferiore all’unità minima cartografabile, si potrà eliminare il poligono o
inglobarlo in uno adiacente. Se invece il poligono risulta maggiore dell’unità
Pagina 81 di 99
minima cartografabile, sarà necessario poterne semplificare la sua geometria al
fine di garantirne una buona leggibilità del dato.
Gli obiettivi da raggiungere sono così sintetizzabili:
§ mantenere chiarezza e leggibilità nella cartografia (definendo una minima
separazione tra gli oggetti ed una dimensione minima)
§ conservare un buon livello nella qualità degli oggetti rappresentati (le loro
caratteristiche in termini di localizzazione, forma, omogeneità e
distribuzione);
§ mantenere un livello di informazione commisurato alla scala di
rappresentazione.
Pagina 82 di 99
5.4 – Analisi della mappa Perché i dati telerilevati siano utili, dobbiamo essere in grado di estrarre
informazioni significative dalle immagini. Questo ci porta all'elaborazione e
all'interpretazione delle immagini. L'interpretazione e l'analisi delle immagini
telerilevate implica l'identificazione e quindi l'estrazione di utili informazioni sui
diversi elementi presenti sull'immagine. Molte delle interpretazioni e
identificazioni di elementi presenti nelle immagini telerilevate sono effettuate da
un interprete umano su immagini in formato analogico rappresentate in un
computer come una griglia di pixel, con ciascun pixel corrispondente ad un
numero digitale che rappresenta il livello di luminosità di quel pixel nella
immagine. Le immagini possono essere visualizzate in bianco e nero (anche dette
monocromatiche) o come immagini a colori combinando differenti canali o bande
che rappresentano differenti lunghezze d'onda.
L'analisi e l'elaborazione digitale viene usata per migliorare i dati, come
preparazione ad una interpretazione visiva per identificare gli elementi nella
immagine ed estrarre informazioni e possono anche essere effettuati in maniera
automatica senza nessun intervento da parte di un interprete. Spesso tale analisi è
fatta come ausilio a quella effettuata dall'interprete.
Sia le tecniche manuali che quelle digitali per l'interpretazione di dati
telerilevati hanno i loro vantaggi e svantaggi. L'interpretazione manuale è spesso
limitata ad analizzare una singola banda o una singola immagine alla volta a causa
della difficoltà nell'effettuare l'interpretazione visiva con immagini multiple.
L'analisi digitale è utile per analisi simultanee di molte bande spettrali e, inoltre, è
possibile elaborare set di dati voluminosi molto più velocemente di un interprete
umano. Inoltre l'interpretazione manuale è un processo soggettivo, ciò significa
che i risultati varieranno con differenti interpreti, mentre l'analisi digitale è basata
sulla manipolazione di numeri digitali in un computer e quindi è più obiettiva,
dando generalmente risultati più consistenti. In ogni caso la determinazione della

Pagina 83 di 99
validità e della accuratezza dei risultati dall'elaborazione digitale può essere
difficoltosa.
E' importante comprendere che l'analisi visiva delle immagini telerilevate non
esclude l'analisi digitale e viceversa. Entrambe le metodologie hanno i loro meriti.
Nella maggior parte dei casi, un mix di entrambi i metodi costituisce la soluzione
ottimale.

Pagina 84 di 99
5.4.1 – Approccio alla classificazione Scopo del telerilevamento è, come si è detto, la produzione di una mappa
tematica, ovvero di un’immagine costituita da un insieme di punti (pixel) a cui è
associato, oltre all’informazione di tipo spaziale, un attributo di carattere non
spaziale relativo ad uno specifico tema, detto classe o categoria. Per questo
motivo l’elaborazione dei dati in forma digitale che si occupa di generare una
mappa tematica è detta “classificazione”: queste classi che interessano l’utente del
telerilevamento, come ad esempio differenti tipi di colture agricole o differenti
tipi di bosco, non sono registrate direttamente nelle immagini, ma si devono
derivare, in modo indiretto, usando le evidenze contenute nelle misure spettrali
che costituiscono le immagini.
Una mappa tematica mostra quindi la distribuzione spaziale di elementi
identificabili sul territorio: essa fornisce non una descrizione dei dati bensì delle
informazioni dal punto di vista semantico [Brivio, 1999].
Si possono individuare due tipi di approccio per la classificazione di immagini
telerilevate: Supervised, come la massima verosimiglianza o la minima distanza, e
Unsupervised quali la Isodata e la K-means.
Questa classificazione, si basa sul principio che un pixel appartiene o non
appartiene ad una classe. Tale logica a due valori (logica booleana), che sta alla
base di gran parte della matematica e della scienza dei calcolatori, non ammette
sovrapposizioni di classe, non ammette la possibilità di appartenenza parziale ad
un insieme né il concetto di verità parziali.

Pagina 85 di 99
5.4.2. Processi post classificazione L’interpretazione automatica delle immagini telerilevate, ha usualmente
associato nelle discipline che riguardano lo studio del territorio e le Scienze della
Terra (Geografia, Geologia, ecc.) il concetto che ogni cella elementare
dell’immagine rappresenti una e una sola categoria. È evidente invece come la
suddivisione del territorio in unità spaziali ben definite operata dal sensore che
produce una sequenza di pixel discreti, ognuno associato ad un insieme di misure,
sia arbitraria e determinata dalle caratteristiche del sensore e della ripresa, mentre
la realtà presenta dei caratteri di continuità.
La necessità di generare continuità nell’immagine e di eliminare il “rumore”
presente porta all’utilizzo di algoritmi di elaborazione immagini quali:
• Majority Analysis;
• Clump Classes.
Il primo è usato per cambiare i falsi pixel classificati con altri presi da una
singola classe maggiormente vicini.
Il secondo algoritmo raggruppa le aree simili classificate. viene usato per
sfumare l’immagine (Figure 5.2, 5.3).
Figura 5.2 – Immagine Landsat in falsi colori

Pagina 86 di 99
Figura 5.3 – Esempio di post classificazione. L’immagine di sopra rappresenta la
classificazione del bosco effettuata sull’immagine Landsat del 30/08/2001. All’immagine di
sotto è stato applicato il filtro Clump Classes alle classi di colore viola e carminio.

Pagina 87 di 99
5.5 – Metodo di generalizzazione dei dati Allo scopo di rappresentare e gestire le informazioni spaziali mediante un
GIS, è necessario utilizzare una rappresentazione dei dati che sia sganciata dalla
realtà fisica; questo viene realizzato definendo un modello dei dati che sia
abbastanza ampio da accogliere al suo interno tutti gli oggetti che esistono nel
mondo fisico (aree, linee, punti, quote, ecc.) e che sia sufficientemente elastico da
permettere di adattarlo a tutte le combinazioni che effettivamente occorrono nella
realtà.
I principali approcci che consentono di formalizzare queste idee concettuali
usano o serie di punti, linee ed aree (modello vettoriale) oppure discretizzazzioni
regolari per descrivere le varie entità presenti in una porzione di spazio (modello
raster). L’adozione di uno di questi due modelli influenza il tipo e le modalità di
acquisizione dei dati che possono essere usati per descrivere il fenomeno, il modo
in cui saranno visualizzati e le interrogazioni e analisi spaziali che potranno essere
eseguite.
L’evoluzione dei GIS è stata fortemente influenzata da questa dicotomia di
formati. Nei moderni sistemi GIS, al fine di aumentare le capacità di analisi, i dati
vettoriali ed i dati raster coesistono e si integrano a vicenda.

Pagina 88 di 99
5.5.1 – Generalizzazione dei dati dell’area di studio Caso molto comune è di due poligoni adiacenti rappresentanti ad esempio
tessuto urbano continuo e discontinuo, ciascuno minore di 25 ha, ma in totale
maggiore di 25 ha, i quali vengono uniti e classificati con l’area privilegiata.
Figura 5.4 – Esempio di generalizzazione di poligoni con area minore di 25 ha
(M. Bossard, J. Feranec & J. Otahel – February 2000)
Altro caso: piccoli fabbricati urbani discontinui con area minore di 25 ha
vengono raggruppati insieme, se la distanza tra loro è inferiore di 300 m, per
generare una classe di 25 ha.

Pagina 89 di 99
Figura 5.5 – Esempio di generalizzazione di poligoni urbani aventi area minore di 25 ha
(M. Bossard, J. Feranec & J. Otahel – February 2000)
In caso di aree racchiuse, ad esempio da urbano discontinuo, in base alla loro
estensione si deciderà se includerle od escluderle
Figura 5.6 – Esempio di generalizzazione di poligoni racchiusi da altri
(M. Bossard, J. Feranec & J. Otahel – February 2000)
In caso di aeroporti, la classe 124, include anche le aree verdi racchiuse molto
spesso dalla recinzione, opportunamente inglobate per raggiungere i 25 ha.

Pagina 90 di 99
Figura 5.7 – Esempio di generalizzazione di aeroporto
(M. Bossard, J. Feranec & J. Otahel – February 2000)
La generalizzazione della classe 2.4.2. Sistemi colturali e particellari
complessi, dipende appunto dalla complessità dell’area da mappare e dalla sua
posizione nel contesto.
Figura 5.8 – Esempio di generalizzazione di Sistemi colturali e particellari complessi
(M. Bossard, J. Feranec & J. Otahel – February 2000)
Altro particolare caso è rappresentato dalla classe 2.4.3. Aree prevalentemente
occupate da colture agrarie con presenza di spazi naturali, per la loro particolarità
posizione.

Pagina 91 di 99
Figura 5.9 – Esempio di generalizzazione di Aree prevalentemente occupate da colture
agrarie con presenza di spazi naturali (M. Bossard, J. Feranec & J. Otahel – February 2000)
Passando poi alle aree boscate, qui i casi che si possono presentare sono
notevoli, dipendenti dalla posizione degli alberi e dalla loro distribuzione. La
figura sottostante ne sintetizza alcuni.

Pagina 92 di 99
Figura 5.10 – Esempio di generalizzazione di Aree boscate
(M. Bossard, J. Feranec & J. Otahel – February 2000)
Infine, la generalizzazione dei bacini d’acqua implica la separazione o
l’accorpamento degli argini della diga o da porzioni di terra emersa, dipendenti
dalle loro estensioni.
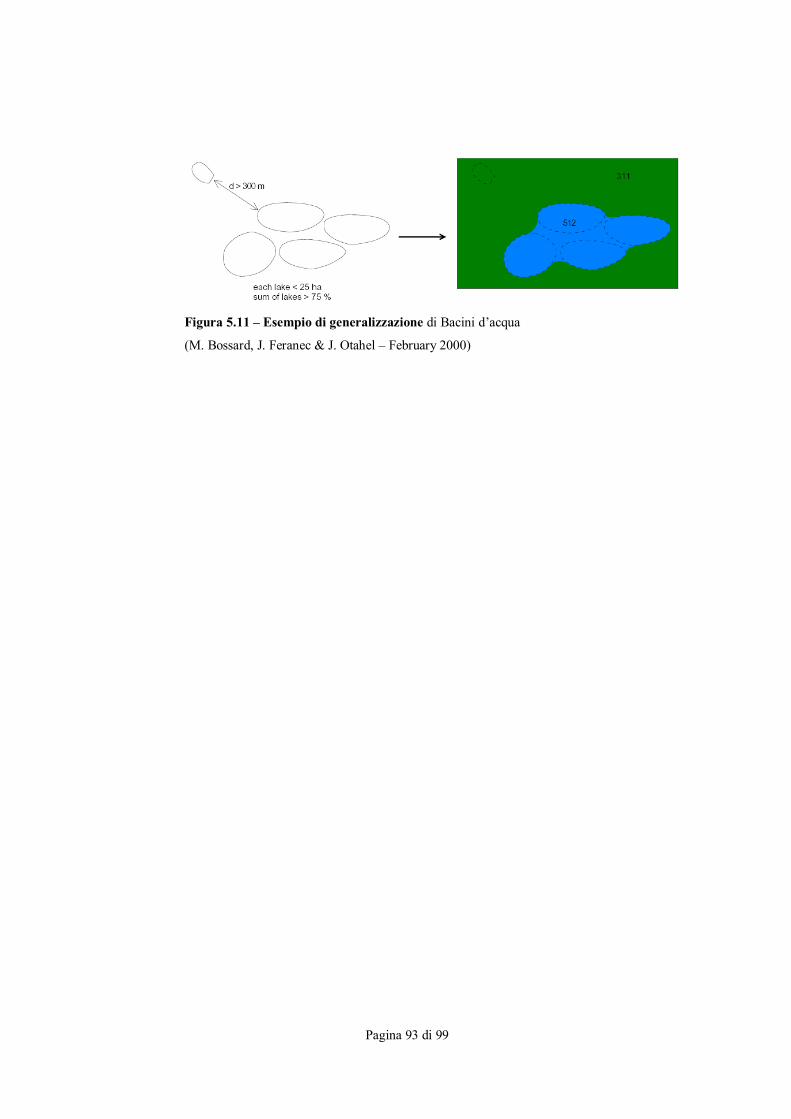
Pagina 93 di 99
Figura 5.11 – Esempio di generalizzazione di Bacini d’acqua
(M. Bossard, J. Feranec & J. Otahel – February 2000)

Pagina 94 di 99
5.5.2 – Dati in formato vettoriale I dati in formato vettoriale memorizzano le informazioni relative alle primitive
geometriche semplici: punti e linee; e complesse come cerchi e poligoni, secondo
una serie di coordinate x, y e z.
La rappresentazione in questo formato ben si presta per la restituzione di
oggetti fisici reali con precise geometrie: un rettangolo, magari rappresenta una
piscina o un campo da tennis, con le sue coordinate reali, il valore della superficie
ed i suoi attributi (profondità, nome del proprietario, ecc.).
La generalizzazione di oggetti naturali, i quali non seguono forme dettate da
interpretazioni matematiche, richiede una sintesi ed una riduzione dei vertici ad
un numero esiguo ma soddisfacente (Figura 5.10)
Figura 5.12 – Dati in formato vettoriale. Restituzione in formato vettoriale dell’ area di
studio.

Pagina 95 di 99
Capitolo 6 – Conclusioni e sviluppi futuri
6.1 – Conclusioni L’obiettivo di questo lavoro di tesi è stato la realizzazione di una cartografia
informatizzata di uso del suolo per un’area campione dell’Alta Val d’Agri (circa
131.000 ha), mediante l’elaborazione di alcune immagini satellitari idonee allo
scopo e commercialmente disponibili, quali:
Immagini Landsat;
Immagini Spot;
opportunamente integrate da:
Ortofoto aeree;
Cartografia IGMI.
A tale scopo si sono utilizzati i seguenti pacchetti software:
Envi;
Arcview.
La cartografia ottenuta da questo lavoro è contenuto in un file di tipo
vettoriale Shape (*.shp), formato comunemente utilizzato dai principali software
per Sistemi Informativi Territoriali (SIT o GIS).
Le informazioni in essa contenuta sono suddivise in 3 livelli gerarchici fino ad
un livello di precisione che copre le 14 classi presenti in una scala di riferimento
compresa tra 1:250.000 – 1:100.000.
La metodologia impiegata è la stessa adottata nll’ambito del programma
CORINE (COoRdination de l' INformation sur l' Environnement), varato dal
Consiglio delle Comunità Europee nel 1985
Ciò consente la gestione ed il confronto di una notevole quantità di
informazioni, relative a due periodi differenti: il 1990, anno della realizzazione
ufficiale del progetto CORINE, ed il 2002, anno di completamento di questo
lavoro.
Pagina 96 di 99
In questo più che decennio le fonti utilizzate come dati di partenza non sono
tecnologicamente molto differenti, pertanto i problemi affrontati in questo lavoro
sono gli stessi affrontati da chi in precedenza ha realizzato la CORINE Land
Cover e dovuti alla non copertura delle bande impiegate di tutto lo spettro
elettromagnetico. Di conseguenza esistono sicuramente regioni dello spettro nelle
quali la classificazione ottenuta non è univoca. Per ovviare a questo problema è
necessario un sopralluogo sul territorio o l’integrazione di altre fonti di
informazione.
In futuro questi problemi saranno sicuramente superati grazie all’uso di nuovi
satelliti dotati di sensori iper spettrali, quali il Cosmo – Skymed., ben superiori ai
sensori non multi spettrali presenti nei satelliti attuali.
Un ulteriore difficoltà si è riscontrata nei pacchetti software utilizzati. Questi,
pur essendo tra i più innovativi attualmente disponibili, presentano alcune lacune
e talvolta falliscono nella classificazione automatica del territorio. Questo ha
richiesto notevoli interventi da parte dell’operatore, che oltre ad essere lunghi e
ripetitivi sono sicuramente fonte di errore e incongruenze.

Pagina 97 di 99
6.2 – Sviluppi futuri Il territorio è in continua evoluzione, quindi qualsiasi forma di cartografia
tende all’obsolescenza.
Di conseguenza risulta necessario l’aggiornamento periodico di un qualunque
SIT.
L’aggiornamento di un database informatico è senza dubbio il punto di
partenza sullo studio dell’evoluzione del territorio. Anche la realizzazione di un
modello dati ambientale, quale ad esempio un modello idrologico, richiede per
una corretta interpretazione una carta di uso del suolo recente.
La cartografia finale ottenuta da questo lavoro, potrà per tanto essere usata ed
integrata in lavori futuri, su di un’area di grande interesse sia ambientale che
economica quale è la Val D’Agri.
Pagina 98 di 99
Bibliografia Centro interregionale di coordinamento e documentazione per le informazioni
territoriali (http://www.centrointerregionale.it):
Metodologie per una cartografia di uso del suolo multilivello e multiscala:
analisi e sperimentazione applicativa – MARCO MARCHETTI – Roma, 19
luglio 2002;
Evoluzione del territorio della Regione Emilia – Romagna: analisi
comparativa tra le due edizioni della carta dell’uso del suolo – STEFANO
CORTICELLI, MARIA LUISA GARBERI, ANDREA GAVAGNI – La Rivista
n. 48 di luglio 2002.
Asita (http://www.asita.it):
Sperimentazione per l’aggiornamento della carta dell’uso del suolo
dell’Emilia-Romagna – Atti della 5° Conferenza Nazionale ASITA, Rimini, 9-12
ottobre 2001, Volume 1 – Corticelli S., Campiani E., 2001.
La georeferenziazione delle informazioni territoriali – LUCIANO SURACE
(Direttore Geodetico, Istituto Geografico Militare, Firenze), Relazione invitata
alla 1° Conferenza Nazionale delle Associazioni Scientifiche per le Informazioni
Territoriali e Ambientali – Parma, 30 settembre-3 ottobre 1997.
Il progetto CASI (Carta delle Aree di Studio per l’Irrigazione) –
Monitoraggio delle aree irrigue e con attitudine all’irrigazione nelle regioni
Obiettivo I – ANDREA FAIS, PASQUALE NINO – Istituto Nazionale di
Economia Agraria (http://www.inea.it).
Breve corso sul Gis (http://www.mondogis.it)

Pagina 99 di 99
Introduzione ai Sistemi Informativi Geografici – Franco Tiviani Editore
Il Telerilevamento – Giovanni Lechi e Eugenio Zilioli
http://www.sister.it
http://www.planetek.it - Corso On line di Telerilevamento
Principles of Geographical Information System – Peter A. Burrogh and
Rachael A. McDonnell – Oxford University Press.
A guide to remote sensing – Oxford Science Publications
Corine Land Cover Technical guide – European Environment Agency –
http://www.eea.eu.int