universidade federal rural do semiárido departamento de ciências
TRANSCRIPT
UNIVERSIDADE FEDERAL RURAL DO SEMIÁRIDO
DEPARTAMENTO DE CIÊNCIAS EXATAS E NATURAIS
CURSO DE CIÊNCIA E TECNOLOGIA
CARLOS MÜLLER PONTIERI DE SOUSA
UMA APLICAÇÃO DAS EQUAÇÕES DIFERENCIAIS À DEFLEXÃO DE VIGAS
MOSSORÓ – RN
2013

CARLOS MÜLLER PONTIERI DE SOUSA
UMA APLICAÇÃO DAS EQUAÇÕES DIFERENCIAIS À DEFLEXÃO DE VIGAS
Trabalho de Conclusão de Curso apresentado a
Universidade Federal Rural do Semiárido –
UFERSA, Departamento de Ciências Exatas e
Naturais para a obtenção do título de Bacharel
em Ciência e Tecnologia.
Orientador (a): Profª. M.Sc. Valdenize Lopes
do Nascimento – UFERSA.
MOSSORÓ – RN
2013

Ficha catalográfica preparada pelo setor de classificação e
catalogação da Biblioteca “Orlando Teixeira” da UFERSA
S719u Sousa, Carlos Muller Pontieri
Uma aplicação das equações diferenciais à deflexão de vigas. /
Carlos Muller Pontieri Sousa -- Mossoró, RN: 2013.
64f.: il.
Monografia (Graduação em Ciência e Tecnologia) –
Universidade Federal Rural do Semi-Árido. Pró-Reitoria de
Graduação.
Orientador: Profº. M. Sc. Valdenize Lopes do Nascimento.
1.Equações diferenciais. 2.Aplicações. 3.Vigas. 4. Curva
deflexão. I.Título.
CDD:515.35 Bibliotecária: Marilene Santos de Araújo
CRB-5/1033

CARLOS MÜLLER PONTIERI DE SOUSA
UMA APLICAÇÃO DAS EQUAÇÕES DIFERENCIAIS À DEFLEXÃO DE VIGAS
Trabalho de Conclusão de Curso apresentado a
Universidade Federal Rural do Semiárido –
UFERSA, Departamento de Ciências Exatas e
Naturais para a obtenção do título de Bacharel
em Ciência e Tecnologia.
APROVADO EM: 12/04/2013
BANCA EXAMINADORA

DEDICATÓRIA
A Deus, pelas bênçãos ao longo desta
caminhada.
A Valdenize Lopes do Nascimento, minha
orientadora, pela disponibilidade, paciência,
conhecimento e por todo carinho contido em
suas palavras.
A Antonia Nilde da Conceição Sousa, minha
mãe, por todos os ensinamentos, pelo amor,
por ter me feito quem sou.
A Francisco Edgar de Sousa, meu pai, por
todos os ensinamentos e esforços a mim
confiados.
A irmã Aryadne Karennyne de Sousa, e aos
irmãos Douglas Vinicius de Angellis Sousa e
Tonny Kentenich de Nilde Sousa, por serem
minha fortaleza maior, pelos momentos de
alegria e tristeza, todas as superações,
conselhos e aprendizados compartilhados, e
toda a confiança em mim depositada.
A Eduardo Masquerano de Sousa Alves e
Thabita Manoella de Sousa Alves, meus
sobrinhos pelo amor inocente, carinho,
armações e alegrias.

AGRADECIMENTOS
A Deus, por toda força e fé, guiando os meus passos constantemente, por me manter paciente
e humano, pelas pessoas que pôs em minha volta, por toda a coragem a enfrentar este
caminho, pelas oportunidades, escolhas e proteção a todos que amo.
Aos meus pais, Antonia Nilde da Conceição Sousa e Francisco Edgar de Sousa, por todo o
apoio educativo, pelo símbolo familiar a ser seguido. Por todo o amor e carinho.
A meus irmãos, Tonny Kentenich, Douglas Angellis e Aryadne Karennyne, por todo o apoio,
torcida, conselhos e orações. Muito obrigado manolos!
A minha Tia e Madrinha, Márcia Maria de Sousa, por todas as conversas, conselhos, por
acreditar, e sempre me abençoar em cada batalha, através dela meus agradecimentos a toda a
família.
A Valdenize Lopes, por toda orientação, conhecimento, por todo o tempo de dedicação. Por
toda a paciência e pelo seu ego acolhedor. Muito obrigado Professora!
Ao Professor Raimundo Amorim, por toda a ajuda, conhecimento e disponibilidade para a
realização deste trabalho.
Aos professores, que fizeram parte do meu processo educacional, pela maior das riquezas, que
é a educação, por todo o conhecimento transmitido. A estes o meu eterno agradecimento!
A Universidade Federal Rural do Semiárido, em especial a Dona Lúcia, pelo apoio a moradia
na vila acadêmica.
A Dafne Ravenna Pascoal de Morais, irmã de outro lar, por todas as superações, nas quais
esteve sempre ao meu lado, pelos sorrisos, pelas danças, pelos conselhos, por ser aquele
alguém em que sempre poderei confiar, muito obrigado amiga!
A todos os amigos, que contribuíram direta ou indiretamente para a realização deste trabalho,
seja pelo simples convívio, perrengues compartilhados ou grupos de estudo. Em especial a
Palloma Borges, pela simplicidade e carisma, se mostrando sempre a disposição de ajudar, a
Marcelo Alcântara, pela irmandade, estudos e conversas que muito me ajudaram pessoal e
academicamente, a Jéssica Pinheiro, por estar sempre a me alegrar, aconselhar, enfim, por me
aturar, a Márcia Yara, grande amiga, por todos os livros emprestados, e pela companhia de
orientação. Aos amigos Tulio Morais, Amanda Bezerra, Camila Lopes, Larissa Torquato,
Renan Abdon, Elaine Patrícia, Everton, Daniel Crisóstomo, Rauny Oliveira, Gemison
Martins, Fábio Cyro, Diana Lopes, Taisa Sangela, Samanta Holanda, Jorge Luiz, Arimatéia
Pinto, Ricardo Cunha, Michael de Carvalho, Fabielly Sales, Jhonnys Moura, Bárbara
Albuquerque, Vitória Melo, Jaem Menescal, Luara Jales, Felipe Neto, Andréia Costa, Renato
Melo, Camila Oliveira, Magno Monteiro, Bruno Noronha, Talita Cabral, Talita Melo, Renata
Jackeline, Iago Alves, Vivianny Crislley, Pedro Ismael, Paulo Alexandre, Allyson Bezerra,
Allyson Filgueira, João Marcos, Diego, Paulo Afonso, Carlito Vasconcelos, Ticiane
Albuquerque, Lincoln, Ailton, Wlardson, Isabel Gomes, Estefferson, Juliana Lira, Jaiane
Pinheiro, Carolina Mendes, Luiza Medeiros, Vitória Daeny, Thamires Dantas, Flávia Dayane,

Flávia Freitas, Ticianne, Lorena, Michelanyo, Victor, Bárbara, Bruna Costa, Raymar, Talita,
Artur Amaral, Paula Moura, Beatriz Távina, Nicholas Henrique, Felipe Willon, enfim,
agradeço a todos que sempre estiveram ao meu lado e que fazem parte desta conquista.
Aos universitários, Hugo Melo, Felipe Barreto, Donato, Paulo César, Daniel, Sávio, Mayky,
Weydson, Gustavo, Dimas, Douglas, Richardson, Rodrigo, Aravena e Horácio, que embora
por pouco tempo, dividiram experiências de luta centradas no objetivo maior da educação
superior, sucesso a todos nós!

“O conhecimento não obedece às leis da troca
mercantil, ele tem mesmo a virtude de fazer
exatamente o oposto. Em vez de um jogo de
resultado nulo, ele suscita a multiplicação de
seu valor.”
(Michel Serres)

RESUMO
As equações diferenciais estão presentes em quase todos os tipos de estudo, não só nas áreas
de engenharia, como também, na física, biologia, estatística, dentre outras, o que faz o seu
estudo ser de grande importância. Estas equações apresentam relações entre as taxas de
variação de uma função e servem de ferramenta para descrever fenômenos físicos em
linguagem matemática. Uma de suas aplicações envolve o estudo da mecânica dos sólidos em
função de forças atuantes. Podemos indicar como corpos sólidos as vigas, que são elementos
estruturais projetados para receber carregamentos e suportar diversas cargas ao longo de sua
extensão. Os carregamentos aplicados a uma viga, sejam eles de forças transversais ou
momentos, levam à sua consequente deflexão ou flexão, fazendo com que a mesma passe a
apresentar uma curva, chamada de curva de deflexão ou elástica. A obtenção da equação que
descreve esta curva, contribui quanto a visualização reativa da viga sob atuação de
carregamentos, sendo possível ainda, a partir desta, obter o valor máximo da deflexão,
importante no projeto de vigas. Deste modo podemos concluir que o estudo das equações
diferenciais é de fundamental importância para os estudantes de engenharia.
Palavras-chave: Equações diferenciais, aplicação, vigas, curva de deflexão.

LISTA DE FIGURAS
Figura 1 – Deslocamento transversal ν(x) dos pontos situados sob o eixo longitudinal x ....... 10
Figura 2 – Setor circular ........................................................................................................... 13
Figura 3 – Duas retas paralelas ................................................................................................. 14
Figura 4 – Duas retas paralelas cortadas por uma transversal .................................................. 14
Figura 5 – Círculo Trigonométrico ........................................................................................... 15
Figura 6 – Círculo trigonométrico e eixo da tangente .............................................................. 16
Figura 7 – Representação da interpretação de
como um quociente ................................... 21
Figura 8 – Representação de carregamentos em uma estrutura................................................ 24
Figura 9 – Representação utilizada para os apoios ................................................................... 26
Figura 10 – Convenção de sinal positivo para as cargas internas V (Esforço cortante) e M
(Momento fletor) ...................................................................................................................... 29
Figura 11 – Curva Elástica ....................................................................................................... 33
Figura 12 – Faixa infinitesimal da viga .................................................................................... 34
Figura 13 – Ângulos de deflexão de uma faixa infinitesimal ................................................... 35
Figura 14 – Congruência entre ângulos formados entre duas retas paralelas cortadas por uma
transversal ................................................................................................................................. 36
Figura 15 – Comportamentos das fibras infinitesimais ............................................................ 38
Figura 16 – Arcos infinitesimais de circunferência dx e ds’ .................................................... 40
Figura 17 – Triângulo retângulo de valores infinitesimais ....................................................... 43
Figura 18 – Esforços internos causados pela atuação de carregamento em faixa infinitesimal
.................................................................................................................................................. 48
Figura 19 – Viga Biapoiada ...................................................................................................... 51
Figura 20 – Seção da viga biapoiada ........................................................................................ 52
Figura 21 – Viga engastada ...................................................................................................... 57
Figura 22 – Seção em revestrez da viga engastada .................................................................. 57

SUMÁRIO
1 INTRODUÇÃO ................................................................................................................... 10
2 REFERENCIAL TEÓRICO .............................................................................................. 12
2.1 NOÇÕES DE GEOMETRIA EUCLIDIANA E TRIGONOMETRIA .............................. 13
2.2 CÁLCULO DIFERENCIAL E INTEGRAL ...................................................................... 17
2.3 NOÇÕES DE RESISTÊNCIA DOS MATERIAIS ........................................................... 24
2.4 VIGAS ................................................................................................................................ 31
3 METODOLOGIA ................................................................................................................ 33
4 EQUAÇÃO DIFERENCIAL DA CURVA DE DEFLEXÃO NAS VIGAS ................... 33
4.1 OBTENÇÃO DAS RELAÇÕES ENTRE AS TAXAS DE VARIAÇÃO NAS VIGAS ... 46
4.2 ESTUDO DE PROBLEMAS DE VALOR DE CONTORNO (PVC) NAS VIGAS ......... 51
4.2.1 Viga Biapoiada ............................................................................................................... 51
4.2.2 Viga Engastada .............................................................................................................. 57
5 CONCLUSÃO ...................................................................................................................... 61
REFERÊNCIAS BIBLIOGRÁFICAS ................................................................................. 62

10
1 INTRODUÇÃO
A deflexão está associada à Engenharia Civil principalmente em projetos de vigas
horizontais para edifícios, pontes e demais obras civis. Ela corresponde ao deslocamento,
, na direção do eixo , perpendicular ao eixo da viga, em qualquer ponto , localizado
sob o eixo da mesma, eixo , como visto na Figura 1, sendo portanto uma variação em relação
à linha assumida inicialmente por esta, sob a aplicação de carregamentos atuantes no plano xv.
Figura 1 – Deslocamento transversal ν(x) dos pontos situados sob o eixo longitudinal x
O projeto de vigas é feito considerando-se critérios de resistência, e ainda com base
em outro aspecto também importante, que é a determinação da deflexão. (BEER, 2008)
O carregamento aplicado a uma viga, seja ele de forças transversais ou momentos,
leva à sua deflexão ou flexão, alterando o eixo longitudinal da viga, inicialmente reto, para
uma curva que é chamada de curva de deflexão. Esta curva é caracterizada por uma função
ν(x) que mede o deslocamento transversal (i.e., deslocamento na direção ν) dos pontos que se
situam ao longo do eixo da viga. (ROY R CRAIG, 2003)
A deflexão máxima de uma viga sob um determinado carregamento tem importância
especial, pois as especificações de projeto de uma viga geralmente incluem um valor máximo
admissível para sua deflexão. Vale ressaltar também que o conhecimento das deflexões é
necessário para analisar as vigas indeterminadas, que são aquelas nas quais o número de
reações nos apoios excede o número de equações de equilíbrio disponíveis para determinar as
incógnitas. (BEER, 2008)

11
O embasamento teórico da engenharia está intimamente ligado à utilização de
artifícios matemáticos, podendo nesta situação, ser encontrada a curva de deflexão,
denominada também de linha elástica, através de equações diferenciais, que são importantes
ferramentas de aplicação para o Engenheiro por envolver conceitos de variação. Sua
utilização pode ainda contribuir com o desenvolvimento da capacidade de solucionar
problemas. Neste sentido, mostraremos neste trabalho, uma aplicação importante das
equações diferenciais na deflexão de vigas, a qual é de fundamental importância para a
engenharia civil.

12
2 REFERENCIAL TEÓRICO
A aplicação do conhecimento pode ser considerada como uma forma estratégica para
buscar motivação e envolvimento no processo de aprendizagem, trazendo consigo a
objetividade de sua utilização futura. Dennis G Zill escreveu sobre uma destas possibilidades,
que se faz pela necessidade da incorporação de modelos matemáticos a fenômenos da vida
real, levando-se em conta metas a serem alcançadas.
Modelos Matemáticos É frequentemente desejável descrever o
comportamento de algum sistema ou fenômeno da vida real em termos
matemáticos, quer sejam eles físicos, sociológicos ou mesmo econômicos. A
descrição matemática de um sistema ou fenômeno, chamada de modelo
matemático, é construída levando-se em consideração determinadas metas.
(ZILL, 2011, p. 20).
As equações diferenciais estão presentes em quase todos os tipos de estudo, não só em
áreas de engenharia, como também, na física, biologia, estatística, dentre outras, o que faz o
seu estudo ser de grande importância. Uma das utilidades das equações diferenciais é o estudo
da mecânica dos sólidos em função de forças atuantes, sendo exemplos de corpos sólidos, as
vigas, que são elementos estruturais projetados para receber carregamentos e suportar diversas
cargas dispostas perpendicularmente ao seu eixo longitudinal. Uma das utilidades das
equações diferenciais na engenharia civil é o estudo da deformação transversal das vigas com
o objetivo de obter a curva de deflexão ou elástica, fazendo com que se possa conhecer a
reação da viga sob a atuação de cargas atuantes sobre a mesma. (MENEZES & GAMA, 2012)
A utilização das equações diferenciais no problema de deflexão de vigas requer a
utilização do método das integrações sucessivas, obtendo a cada integração, constantes (i.e.,
constantes de integração) que podem ser encontradas através de problemas de valor inicial
(PVI) ou problemas de valor de contorno (PVC), assumidos conforme as vigas sejam
apoiadas, para a obtenção da curva de deflexão formada.

13
2.1 NOÇÕES DE GEOMETRIA EUCLIDIANA E TRIGONOMETRIA
Proposição 1: O comprimento do arco de circunferência que subentende um ângulo central
de radianos é dado por , onde é o raio da circunferência.
Demonstração: Sabemos que o comprimento de uma circunferência de raio é dado por
, e portanto, o comprimento de um arco de circunferência, que subentende um
ângulo de radianos, pode ser obtido através de uma regra de três simples, onde está para
, assim como está para . (Figura 2)
Figura 2 – Setor circular
Assim,
Portanto,
(1)

14
Definição 1: Dizemos que duas retas são paralelas quando elas estão em um mesmo plano e
não possuem pontos em comum. É usual a notação , para indicar que as retas e são
paralelas. (Figura 3)
Figura 3 – Duas retas paralelas
Proposição 2: Sejam e duas retas paralelas, uma transversal. Os ângulos , , , ,
, , e formados por estas três retas, conforme indicado na Figura 4, satisfazem as
seguintes igualdades:
(a) ;
(b) .
Figura 4 – Duas retas paralelas cortadas por uma transversal

15
Teorema 1: Existe um único par de funções definidas em , chamadas seno e cosseno,
indicadas por e , respectivamente, as quais satisfazem as seguintes propriedades:
(1)
(2)
(3) Quaisquer que sejam os reais e
(4) Quaisquer que sejam os reais e
(5) Existe tal que
(
)
para .
(6) , .
Podemos observar que para todo , o ponto ( ) pertence à circunferência
. (Figura 5).
Figura 5 – Círculo Trigonométrico

16
A partir das funções seno e cosseno podemos definir uma função chamada tangente,
indicada por e dada por
, cujo domínio é o conjunto de todos os tais que
.
Geometricamente, é interpretada como a medida algébrica do segmento , onde
é a interseção da reta contendo o segmento com a reta tangente ao círculo
trigonométrico no ponto , conhecida como eixo das tangentes. (Figura 6)
Figura 6 – Círculo trigonométrico e eixo da
tangente
De fato, os triângulos e indicados na Figura 6 são semelhantes. Logo,

17
2.2 CÁLCULO DIFERENCIAL E INTEGRAL
Definição 2: Sejam uma função e um ponto do domínio de ou extremidade de um dos
intervalos que compõem o domínio de . Dizemos que tem limite , em , se, para todo
dado, existir um tal que, para todo ,
| | | |
Tal número , que quando existe é único, será indicado por
Teorema 2 (do confronto): Sejam , , três funções e suponhamos que exista tal que
para | | . Nestas condições, se
então,

18
Proposição 3(limite fundamental):
Demonstração: Pela propriedade (5) do teorema 1 existe tal que
para . Dividindo por
e, portanto, para
Por outro lado,
Como e
Assim para todo , como | |

19
Como
, segue pelo teorema do confronto que
Observe que para módulo de suficientemente pequeno,
e portanto,
.
Proposição 4:
Demonstração: Temos que
Portanto,
(
) (
)
Observe que para módulo de suficientemente pequeno,
e portanto,

20
Proposição 5:
.
Demonstração: Temos que
Portanto,
(
) (
)
Observe que para módulo de suficientemente pequeno,
e portanto, .
Definição 3: Sejam uma função e um ponto de seu domínio. O limite
quando existe e é finito, denomina-se derivada de em e indica-se por (leia: linha
de ). Assim
Se admite derivada em , então diremos que é derivável ou diferenciável em .

21
Frequentemente são utilizadas expressões do tipo , , ,
dentre outras, para indicar uma função. Nestes casos, , e representam variáveis
dependentes e , e variáveis independentes.
Para podemos utilizar a notação de Leibniz para a derivada de em relação
a ,
(leia: derivada de y em relação a x), sendo
. Neste caso, a derivada,
,
pode ser interpretada como o quociente entre dois acréscimos. Vamos olhar como um
acréscimo em e, em seguida, procuraremos uma interpretação para o acréscimo . Sabendo
que a derivada da função , no ponto é o coeficiente angular da reta tangente a
curva. Se olharmos, então, para como o acréscimo na ordenada da reta tangente, teremos
que
. Observe que é o acréscimo na função , quando se passa de para
. O acréscimo pode então ser olhado como um valor aproximado para , e que o
erro, , “ ” que se comete com esta aproximação será tanto menor quanto for .
(Figura 7).
Figura 7 – Representação da interpretação de
como um quociente
Se é diferenciável, então sua derivada pode ser dada por , ou
, onde
, e ainda, se também o for, poderá ser denotada por , ou
(
)
,
de forma análoga a n-ésima derivada de , se existir, será denotada por , ou
, onde é a ordem da derivada.

22
Definição 4: Uma equação que contém as derivadas (ou diferenciais) de uma ou mais
variáveis dependentes em relação a uma ou mais variáveis independentes é chamada de
equação diferencial (ED).
Uma importância das equações diferenciais é a de servirem de ferramenta a descrever
fenômenos físicos em linguagem matemática (i.e., modelagem matemática), dada a
possibilidade de envolverem a taxa de variação segundo a qual as coisas acontecem, tal que as
proposições ou relações físicas seriam as equações, e as taxas, derivadas. As equações
diferenciais são aquelas que contêm derivadas, ou seja, apresentam relações entre suas taxas,
tal que aquelas que descrevem algum fenômeno físico, são chamadas ainda de modelo
matemático do processo. (BOYCE, 2010)
As incógnitas destas equações são funções, e as diferenciais envolvidas, derivadas
destas mesmas funções.
Pode ser classificada por tipo, ordem e linearidade. Ao tipo, em ordinária e parcial. Se
ela contiver somente derivadas ordinárias de uma ou mais variáveis dependentes em relação a
uma única variável independente, será classificada como ordinária (EDO). A equação
diferencial ordinária, é definida por uma relação existente entre uma ou várias derivadas de
uma função , não especificada, em relação a , podendo a função ainda, envolver a própria
função , funções de e constantes.
Por exemplo,
são equações diferenciais ordinárias.
E se envolver as derivadas parciais de uma ou mais variáveis dependentes em relação
a duas ou mais variáveis independentes, como parcial (EDP).

23
A ordem de uma equação diferencial será aquela da maior derivada da equação. Por
exemplo,
é uma equação diferencial ordinária de segunda ordem, dado que , é de segunda ordem,
de primeira ordem, e sendo a derivada de segunda ordem a de maior grau nesta equação
diferencial.
Dizemos que uma equação diferencial ordinária de ordem n é linear se F for linear em
, isto é, quando uma EDO de n-ésima ordem for do tipo,
Uma equação diferencial ordinária não-linear é simplesmente uma que não é linear.
Para construir um modelo matemático deve-se primeiro formular a equação diferencial
apropriada, que melhor descreva ou modele o problema em questão, porém “modelar não é
uma habilidade que pode ser reduzida a uma lista de regras”. (BOYCE, 2010, p. 5)
Frequentemente, a resolução de uma equação diferencial linear, depende de condições
de contorno, ou seja, apresenta condições iniciais “especificadas sobre a função desconhecida
ou sobre uma de suas derivadas ou até mesmo sobre uma combinação linear da função
desconhecida e uma de suas derivadas em dois (ou mais) pontos diferentes”. (ZILL, 2011, p.
206)
Definição 5: Toda função , definida em um intervalo que tem pelo menos derivadas
contínuas em , as quais quando substituídas em uma equação diferencial ordinária de ordem
reduzem a equação a uma identidade, é denominada uma solução da equação diferencial no
intervalo.
Definição 6: Dizemos que uma relação é uma solução implícita de uma equação
diferencial ordinária , em um intervalo , quando existe pelo menos
uma função que satisfaça a relação, bem como a equação diferencial em .

24
Teorema 3 (1º teorema fundamental do cálculo): Se for integrável em e se for uma
primitiva de em , então
∫
2.3 NOÇÕES DE RESISTÊNCIA DOS MATERIAIS
Os carregamentos são as representações da atuação de cargas aplicadas em uma
estrutura, sendo gerados a partir da ação destas sobre a mesma, podendo ser exatas ou
aproximadas. Quanto ao tipo, as cargas são classificadas em forças e momentos, e quanto à
forma de aplicação ao longo da extensão da estrutura, são classificadas em concentradas e
distribuídas. (ALMEIDA, 2009)
Figura 8 – Representação de carregamentos em uma
estrutura
Definição 7: Força é uma grandeza vetorial que apresenta módulo (intensidade), direção,
sentido e ponto de aplicação, provocando um deslocamento linear (translação). (Figura 8(a))
Definição 8: Momento é uma grandeza vetorial que apresenta módulo (intensidade), direção,
sentido e ponto de aplicação, provocando um deslocamento angular (rotação). (Figura 8(b))

25
Além da tendência de deslocar um corpo na direção de sua aplicação, uma força pode
ainda rotacionar um corpo em relação a um eixo, esta rotação é conhecida como momento da
força ou torque. (MERIAM & KRAIGE, 2011)
Definição 9: Uma carga é dita concentrada quando aplica uma força ou um momento em uma
região muito pequena (quando comparada as dimensões totais) de uma estrutura.
Definição 10: Uma carga é dita distribuída quando aplica uma força ou um momento em uma
região de dimensões consideráveis (quando comparada as dimensões totais) de uma estrutura.
A resultante de um carregamento distribuído ao longo da extensão de uma estrutura, é
igual a área delimitada pela função do carregamento na região de aplicação da mesma, e o
ponto de aplicação da resultante coincide com o centro de gravidade do diagrama da carga.
As reações de apoio são cargas que respondem a atuação dos carregamentos atuantes
sobre uma estrutura, de forma a impedir alguma possibilidade de deslocamento, e são
chamadas cargas externas reativas, as quais consistem de forças ou momentos concentrados.
Uma vez conhecidos os apoios em uma estrutura submetida a um sistema de
forças, as reações de apoio podem ser calculadas. As reações de apoio são
forças ou momentos, com pontos de aplicação e direção conhecidos e de
intensidades e sentidos tais que equilibrem o sistema de forças ativas
aplicado à estrutura. Os sistemas de forças externas, formados pelas forças
ativas e reativas, têm que estar em equilíbrio. (ALMEIDA, 2009, p. 32)
Os apoios que resistem a uma força, como um pino, restringem o deslocamento, e os
apoios que resistem a um momento, como uma parede fixa, restringem a rotação ou a
inclinação, bem como o deslocamento. (HIBBELER, 2010)
De acordo com estas restrições, os apoios podem ser classificados em três tipos
principais e de fundamental importância para a compreensão dos esforços atuantes em uma
estrutura: apoios simples, rótula ou articulação e engaste.

26
Figura 9 – Representação utilizada para os apoios
Definição 11: Apoio simples é aquele que impede a translação em uma das direções da
estrutura e que permite a translação na direção perpendicular à impedida e a rotação em torno
do eixo perpendicular ao plano da estrutura considerado. (Figura 9(a))
Definição 12: Rótula ou articulação é aquele que impede a translação segundo as duas
direções, e permite o deslocamento por rotação em torno do eixo perpendicular ao plano da
estrutura. (Figura 9(b))
Definição 13: Engaste é o tipo de apoio que impede tanto os deslocamentos por rotação nos
eixos do plano da viga, quanto o de translação no eixo perpendicular ao plano da viga. (Figura
9(c))
Definição 14: Uma estrutura é uma composição de uma ou mais peças, ligadas entre si e ao
meio exterior formando um sistema em equilíbrio, podendo este ser estático ou dinâmico.
Uma estrutura é capaz de receber solicitações externas, denominadas ativas, absorvê-
las internamente e transmiti-las até seus apoios ou vínculos, onde elas encontram um sistema
de forças externas equilibrantes, denominadas forças reativas.
Na Engenharia Civil, em particular, são exemplos de estruturas as partes resistentes de
uma construção, como vigas, lajes, paredes, pilares, sapatas e blocos, sendo estes dois últimos
partes integrantes das fundações.
As condições de equilíbrio das estruturas garantem a estas o equilíbrio estático em
qualquer seção isolada da estrutura ou na estrutura como um todo. As condições de equilíbrio
são baseadas nas leis de Newton.
Para que as estruturas civis estejam em estado de repouso permanente, a força
resultante deve ser nula, de modo que o equilíbrio seja garantido pelo sistema estrutural.

27
A primeira lei de Newton, ou lei da inércia, permite estabelecer que, se a força
resultante atuante em um corpo é nula, então é possível encontrar um conjunto de sistemas de
referência, denominado sistema inercial, no qual este corpo não possui aceleração.
Pelo princípio da ação e reação, ou terceira lei de Newton, quando um corpo exerce
uma força sobre outro, esta ação gerará em razão da interação mutua entre as partículas, uma
reação que o segundo corpo exercerá sob o primeiro, sendo estas duas forças sempre iguais
em intensidade e opostas em sentido.
A primeira lei de Newton é aplicada a um problema para determinar o equilíbrio em
qualquer partícula presente, ou em todo o sistema em equilíbrio, sendo a terceira lei,
responsável por garantir este equilíbrio sob condições de ação e reação.
Estes princípios são aplicáveis a todas as estruturas que receberem cargas e estejam
em equilíbrio, valendo para todas as forças verticais, horizontais e inclinadas.
Desta forma, sob a atuação de carregamentos em uma estrutura, se tem, conforme são
apoiadas, reações de apoio, para manter a estrutura em equilíbrio, “como resposta à ação de
esforços externos (cargas atuantes e momentos), as estruturas de acordo com os seus vínculos
reagem ou tentam reagir com forças e Momentos Fletores”. (BOTELHO, 2010, p. 33)
Portanto, para que uma estrutura se mantenha estável, a soma das cargas horizontais,
verticais e momentos fletores, devem ser nulas uma a uma, isto é,
(2)
(3)
(4)
Um sistema está em equilíbrio, quando a força e o momento resultantes, em relação a
qualquer outro ponto do espaço, são nulos. Garantindo assim, também, as mesmas condições
de equilíbrio para os esforços internos ao longo da extensão da estrutura. (FONSECA, 1978)
Os esforços internos correspondem à transmissão do carregamento entre as partes do
corpo após sua aplicação, sendo aqueles que surgem entre todas as seções contíguas de um
corpo submetido à ação de esforços externos, a gerar uma interação entre as partes do corpo,
mantendo cada segmento deste em equilíbrio. (ALMEIDA, 2009)
A distribuição destas forças se dá através de tensões, e obtê-la é de suma importância
na resistência dos materiais. Estas distribuições podem ser determinadas utilizando o método
das seções.

28
Definição 15: Tensão é a relação existente entre a intensidade da força interna atuante sobre
um determinado plano específico localizado ao longo da extensão de uma estrutura.
Definição 16: Esforço cortante é uma força interna atuante numa seção, sendo este igual à
soma vetorial das componentes atuantes das forças externas situadas em um dos lados da
seção.
O esforço cortante faz com que duas seções infinitamente próximas, tendam a
promover um deslizamento relativo, gerado pela atuação de esforço interno de uma em
relação à outra a manter o equilíbrio. Esse deslizamento também recebe o nome de
cisalhamento, e o mesmo é definido como a soma algébrica das forças à esquerda ou à direita
de uma seção perpendicular ao eixo do elemento.
Definição 17: Momento fletor é a soma vetorial das componentes, sobre o plano da seção, dos
momentos de todas as forças situadas de um dos lados da seção em relação ao seu centro de
gravidade.
O momento fletor tem a tendência de provocar uma rotação da seção em torno de um
eixo situado no próprio plano da mesma. É encontrado a partir da soma algébrica dos
momentos de todas as forças à esquerda ou à direita de uma seção transversal (i.e., a mesma
referente ao esforço cortante, perpendicular ao eixo do elemento) sendo calculados em torno
de um eixo que passa pelo centroide da seção transversal.

29
Os engenheiros geralmente usam uma convenção de sinal para informar as cargas
internas, embora essa convenção possa ser adotada arbitrariamente, a que é mais aceita será
utilizada aqui para os esforços internos que tem influência sob o problema de deflexão de
vigas (i.e., esforço cortante e momento fletor). Um esforço cortante positivo, Figura 10(a),
fará com que o segmento da viga sobre o qual atua gire no sentido horário, e um momento
fletor positivo, Figura 10(b), tenderá a curvar o segmento no qual ele atua de uma maneira
côncava para cima. As cargas internas opostas a estas são consideradas negativas.
Figura 10 – Convenção de sinal positivo para as cargas internas V (Esforço
cortante) e M (Momento fletor)
Desta forma sempre que uma carga atua sob um corpo, o mesmo tende a transmitir
este carregamento entre as partículas através de esforços internos, a alterar sua forma e
dimensões, sendo estas alterações denominadas de deformações. Podem ser altamente visíveis
ou quase imperceptíveis, com base no material que compõe o corpo, e na função estrutural do
mesmo. Como resultado estas deformações podem provocar aos pontos no corpo,
deslocamento ou mudanças de posição. Sendo as de deslocamento, provocadas pela
deformação normal, e as de posição pela deformação de cisalhamento. A deformação normal
é uma medida de alongamento ou contração de um segmento de reta do corpo enquanto a
deformação por cisalhamento aquela referente a uma mudança no ângulo entre dois
segmentos de reta originalmente perpendiculares entre si. (HIBBELER, 2010)
Definição 18: Deformação normal é o alongamento ou contração de segmento de reta por
unidade de comprimento, a exemplo, para melhor definição formal, com uma reta , de
comprimento inicial , que após deformação é deslocada para os pontos e , tal que a
reta torna-se uma curva, de comprimento , e definindo deformação pelo símbolo ,
teremos a equação da deformação normal como sendo:
(5)

30
Na maioria dos projetos de engenharia as aplicações envolvidas permitem somente
pequenas deformações, tal que visivelmente os elementos praticamente não se deformam, e
ainda pelo fato de que mesmo os materiais sendo expostos a deflexões aparentemente
grandes, o material possa estar submetido somente a deformações muito pequenas, tal que
estas são consideradas quase infinitesimais, e muito pequenas em comparação com a unidade,
ou seja, , tendo esta premissa bastante aplicabilidade na engenharia, sendo denominada,
em geral, por analise de pequenas deformações, a exemplo permite as aproximações de
, e , para um muito pequeno. (HIBBELER, 2010)
O diagrama tensão-deformação para a maioria dos materiais de engenharia exibe uma
relação linear entre tensão e deformação dentro da região elástica. Por consequência, um
aumento na tensão provoca um aumento proporcional na deformação. Esse fato foi descoberto
por Robert Hooke, em 1676, para molas, e é conhecido como lei de Hooke e pode ser
expresso matematicamente como:
(6)
Nesta expressão, representa a constante de proporcionalidade, denominada módulo
de elasticidade ou modulo de Young, nome que e deve a Thomas Young, que publicou uma
explicação sobre o módulo em 1807, e , é a deformação unitária
, ou seja, a relação
existente entre a variação do comprimento, , e seu comprimento inicial, . Desta forma
podemos estabelecer uma lei de relação linear para uma determinada peça em uma
determinada faixa de trabalho, tal que a relação entre a força que produz uma deformação e a
relação de deformação unitária é constante nesta faixa.
Em HIBBELER (2010) é desenvolvida uma equação, denominada de fórmula da
flexão, partindo da premissa de que o material se comporte de maneira linear elástica. Esta
fórmula relaciona a distribuição de tensão longitudinal em uma viga prismática e o momento
fletor interno resultante, , que age na seção transversal da mesma, sendo este provocado
pela atuação das cargas sob a viga, tal que a tensão normal , em uma distância intermediária
, e com momento de inércia da área da seção transversal , possa ser determinada por:
(7)

31
2.4 VIGAS
Definição 19: Vigas são elementos estruturais projetados para suportar cargas aplicadas
perpendicularmente a seus eixos longitudinais.
Por causa dessas cargas, as vigas desenvolvem uma força de cisalhamento interna e
um momento fletor que, em geral, variam de ponto a ponto ao longo do eixo da viga.
Algumas delas também podem estar sujeitas a uma força axial interna; todavia, os efeitos
dessa força costumam ser desprezados no projeto.
Estas peças apresentam seu comprimento bem maior que qualquer outra dimensão, tal
que são projetadas para suportar carregamentos, mais frequentemente, aqueles dispostos
verticalmente ao longo de sua extensão.
As vigas são compostas por barras (elementos unidimensionais) interconectadas por
nós, rígidos ou articulados, em que todos os elementos tem a mesma direção. As vigas são
modelos planos, uma vez que a estrutura e o carregamento aplicado pertencem a um único
plano. Elas podem ser classificadas conforme são vinculadas ou apoiadas, em simples ou
compostas.
Nas vigas simples todos os nós são rígidos, e nas compostas podem ser rígidos ou
articulados. As vigas de estudo desse trabalho, se tratam de vigas simples. Estas são barras
longas e retas com área de seção transversal constante, sendo classificadas conforme são
apoiadas, sendo as mais comumente encontradas a simplesmente apoiada (i.e., biapoiada, com
apoios simples ou articulação, em suas extremidades), em balanço (i.e., engastada) e a
apoiada com uma extremidade em balanço. (HIBBELER, 2010)

32
As condições de contorno associadas às vigas dependem de como suas extremidades
estão apoiadas. Uma viga em balanço é engastada ou presa em uma das extremidades e livre
na outra, a exemplos, um trampolim, braço estendido, asa de avião e sacada. Para uma viga
em balanço, a deflexão deve atender as seguintes condições de contorno na extremidade
engastada :
, uma vez que não há deflexão devido ao impedimento de
deslocamento transversal;
, uma vez que a curva de deflexão é tangente ao eixo (em outras
palavras, a inclinação da curva de deflexão é zero nesse ponto).
Em , as condições para a extremidade livre são:
, uma vez que o momento fletor é zero;
, uma vez que a força de cisalhamento (i.e., esforço cortante) é zero.
Se uma viga estiver simplesmente apoiada em seus extremos por um apoio simples ou
por uma rótula, teremos necessariamente nessas extremidades:
, uma vez que não há deflexão devido ao impedimento de
deslocamento transversal;
, uma vez que o momento fletor neste ponto também é 0.
33
3 METODOLOGIA
A metodologia utilizada neste trabalho foi a de revisão de literatura. O trabalho foi
iniciado com o estudo do fenômeno físico que descreve a deflexão de uma viga e em seguida
foi efetuada a modelagem do fenômeno através de equações diferenciais, com o objetivo de
obter a função que representa a curva de deflexão. Para isto, foram utilizadas algumas noções
de geometria e trigonometria, cálculo diferencial e integral, e ainda, algumas noções de
resistência dos materiais. Ao final foram obtidas as funções das curvas de deflexão para vigas
biapoiadas e engastadas, sob a atuação de um determinado carregamento.
4 EQUAÇÃO DIFERENCIAL DA CURVA DE DEFLEXÃO NAS VIGAS
Muitas estruturas são construídas utilizando-se grandes suportes de aço ou vigas, as
quais tendem a defletir ou distorcer sob ação de seu peso próprio ou em decorrência de
alguma força externa, tal que essa deflexão é governada por uma equação diferencial linear de
quarta ordem relativamente simples. (ZIIL, 2011, p. 206)
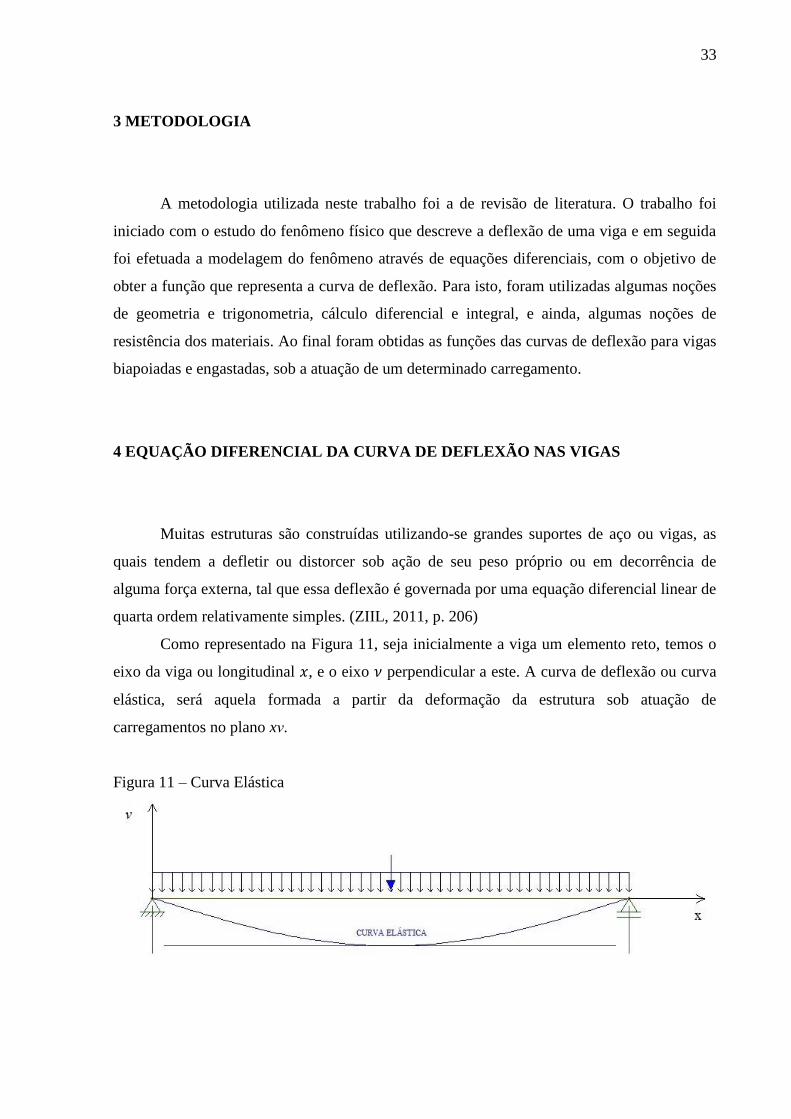
Como representado na Figura 11, seja inicialmente a viga um elemento reto, temos o
eixo da viga ou longitudinal , e o eixo perpendicular a este. A curva de deflexão ou curva
elástica, será aquela formada a partir da deformação da estrutura sob atuação de
carregamentos no plano xν.
Figura 11 – Curva Elástica

34
A partir de uma faixa infinitesimal de comprimento da viga, Figura 12(a), é
possível fazer uma análise em torno das alterações geradas nesta faixa, após deformação,
Figura 12(b), a fim de se obter uma relação entre elas. A deformação em faixa infinitesimal
tem comportamento semelhante a um arco de circunferência, sendo formada em torno de um
centro de curvatura , Figura 12(c), que é encontrado fazendo-se um prolongamento de retas
perpendiculares a curva nos extremos da faixa infinitesimal, sendo o ponto de encontro
destes prolongamentos. O arco é formado em torno de um raio de giração , que vai de ao
eixo neutro (i.e., aquele que não altera seu comprimento após deformação) de comprimento
.
Figura 12 – Faixa infinitesimal da viga
A se fazer uma análise dos ângulos originados pela deformação, teremos, como
representado na Figura 13, e , retas tangentes à curva nos pontos e , respectivamente,
que por serem tangentes formam um ângulo de com o raio de giração , e e , os
ângulos formados por estas e aquelas horizontais, e , que descrevem o posicionamento
inicial das fibras da viga (i.e., antes da deformação). Sendo o ângulo pelo qual o raio de
giração descreve o arco formado, e o ângulo interno do polígono de lados , , e retas
r e s.

35
Como o elemento diferencial é muito pequeno, o acréscimo pode ser olhado
como um valor aproximado para , assim
(8)
Figura 13 – Ângulos de deflexão de uma faixa
infinitesimal
Sendo a soma dos ângulos internos do polígono obtida por,
(9)
desta forma, o somatório dos ângulos internos, , para o polígono, de ângulos internos em
vermelho na FIGURA 11, com lados, será, aplicando-se na equação (9),
(10)

36
E também, fazendo-se o somatório dos ângulos internos descritos na Figura 13,
teremos,
(11)
Igualando as equações (10) e (11), encontraremos,
(12)
Figura 14 – Congruência entre ângulos formados entre duas retas paralelas cortadas
por uma transversal
Como as retas e , são paralelas, e sendo estas cortadas pela transversal , Figura
14, temos pela proposição 2, que os ângulos formados entre e , e e , são congruentes,
logo,
isolando ,
(13)

37
Dado o ângulo formado entre s e t, na Figura 14, ser o mesmo da Figura 13, temos
então que
isolando ,
(14)
O somatório dos ângulos internos do triângulo formado na Figura 14, sendo o mesmo
um polígono de n=3 lados, é obtido da equação (9),
(15)
e ainda, pela proposição 2, os ângulos opostos, interno e externo em relação as paralelas e
formados pelas retas e , são congruentes, tal que o somatório de ângulos internos deste
polígono também pode ser obtido por
(16)
assim, igualando as equações (15) e (16), obteremos
(17)

38
Substituindo (13) e (14), na equação (17),
(18)
e fazendo a substituição de (12) em (18),
(19)
Igualando as equações (19) e (8), concluiremos que
(20)
Assim , em radianos, é o ângulo formado em uma faixa infinitesimal da curva de
deflexão, como visto na Figura 15(b), formado a partir da atuação de carregamento sob a viga
em faixa infinitesimal, Figura 15(a).
Figura 15 – Comportamentos das fibras infinitesimais
Analisando o comportamento das fibras de comprimentos infinitesimais e ,
separadas por uma distância intermediária y, Figura 15(a), que sob atuação de carregamento,
se deformam e passam a apresentar comprimentos e , respectivamente, Figura 15(b).
Percebe-se que antes e após a deformação o comprimento infinitesimal da fibra ,

39
permanece o mesmo, ou seja que sob efeito da deflexão apresentará mesmo comprimento
inicial, , e final, . Sendo este denominado de eixo neutro, assim
(21)
Considerando que a deflexão ocorrerá a partir da aplicação de carga vertical atuante
sob a estrutura, haverá encurtamento das fibras superiores e alargamento das inferiores, ou
seja, que esta viga sofrerá compressão nas fibras superiores e tração nas inferiores, em relação
ao elemento neutro . Os comprimentos infinitesimais das fibras serão antes da deformação
iguais, assim,
e pela equação (21), podemos concluir que
(22)
Para a situação descrita na Figura 15(a) o comprimento de fibra se encontra acima
do eixo neutro, então haverá encurtamento em suas fibras, passando a apresentar
comprimento , tal que , como pode ser visto na Figura 15(b).

40
Figura 16 – Arcos infinitesimais de
circunferência dx e ds’
Sendo e comprimentos infinitesimais de arco de circunferência com raios de
giração e , respectivamente, após a deformação, e sendo ainda o ângulo central ,
em radianos, Figura 16, teremos que de acordo com a equação (1), e pela igualdade da
equação (22),
(23)
e também,
(24)
Substituindo as equações (23) e (24) na equação da deformação (5), sendo
comprimento inicial, , e comprimento final, , teremos que,
( )

41
pondo em evidência,
( )
( )
obtemos então a equação,
(25)
Sendo o material da viga homogêneo e se comportando dentro da região linear
elástica, teremos que a lei de Hooke, equação (6), é aplicável, além disso a fórmula da flexão,
(7), também será. Isolando-se a deformação , na equação (6), e sendo nesta
situação, teremos então
(26)
substituindo a fórmula da flexão (7),
na equação (26),
logo,
(27)

42
Igualando as equações (25) e (27), teremos,
(28)
O produto nessa equação é denominado rigidez à flexão, sempre representando
uma quantidade positiva. Portanto o sinal de depende da direção do momento ,
apresentando assim, os mesmos sinais. (HIBBELER, 2010, p. 423)
Pela equação (23),
logo,
(29)
Igualando as equações (28) e (29), teremos,
(30)
sendo, pela regra da cadeia, resultado do cálculo diferencial,
(31)

43
Figura 17 – Triângulo retângulo de
valores infinitesimais
As variações provocadas pela deformação em faixa infinitesimal forma um triângulo
retângulo, Figura 17, sendo suas dimensões , comprimento longitudinal antes da
defomação, , deslocamento infinitesimal dos pontos localizados sob o eixo longitudinal, e
o comprimento da fibra deformada em arco, tal que em faixa infinitesimal esta se
aproxima de uma reta. Sendo , o ângulo pelo qual a fibra se inclina. Teremos assim, as
seguintes relações trigonométricas,
(32)
(33)
(34)
Desta forma, pela equação (34), sendo a função , com ]
[,
estritamente crescente, portanto inversível, e sua imagem o conjunto dos , teremos para
inversa da função ,
(35)

44
Derivando-se , equação (35), com relação a , teremos
(
)
(
)
[ (
)
]
(36)
Ainda, para o triângulo retângulo da Figura 17, temos pelo teorema de Pitágoras,
Extraindo a raiz de ambos os membros da equação, teremos
√ √
√ (37)
tal que dividindo a equação (37) por , obteremos
√
√
√
√ (
)
logo,
[ (
)
]
(38)

45
Substituindo (36) e (38) na regra da cadeia, equação (31),
teremos que,
[ (
)
]
[ (
)
]
[ (
)
]
(39)
Pela igualdade entre as equações (30) e (39), teremos
[ (
)
]
(40)
que é a equação geral da curva elástica, dita ainda uma equação diferencial, classificada como
uma equação diferencial não-linear de segunda ordem. Equação diferencial, por conter
derivadas ordinárias de uma variável dependente, , em relação a uma única variável
independente , não-lineares por apresentar um expoente para uma das derivadas ou funções
envolvidas,
, diferente de 1, e de segunda ordem por ter como derivada de maior
ordem,
, de ordem 2.

46
4.1 OBTENÇÃO DAS RELAÇÕES ENTRE AS TAXAS DE VARIAÇÃO NAS VIGAS
A equação geral da curva elástica, (40), obtida anteriormente, pode ser modificada a
fim de facilitar a solução de um número maior de problemas de deflexão, tal que a maioria
dos códigos e manuais de engenharia especifica limitações para as deflexões visando questões
de tolerância ou estética, e o resultado é que as deflexões elásticas para a maioria das vigas e
eixos formam uma curva rasa. (HIBBELER, 2010, p. 423)
Ainda, a partir de uma faixa infinitesimal, a viga terá uma inclinação
, muito
pequena, já sendo as inclinações na viga muito pequenas, teremos que em uma faixa
infinitesimal esta será menor ainda, assim pela análise de pequenas deformações, citada na
seção 2.3, são permitidas as aproximações
(41)
(42)
(43)
para um muito pequeno, como demonstrado nas proposições 3, 4 e 5.
Assim, pela aproximação das equações (41) e (43), teremos,
(44)
Logo, pela equação (34), e pela aproximação da equação (44), teremos que
(45)

47
Aplicando (42) e (45), na propriedade (6) do teorema 1,
teremos,
(
)
(
)
(46)
Reforçando a afirmação de
ser tão pequena, tal que seu quadrado se aproxima de
zero. Substituindo (46) em (40), a equação da curva elástica é reduzida a:
[ (
)
]
(47)
A fim de se obter a relação da linha elástica com o momento fletor, isolaremos o
mesmo, encontrando a seguinte equação:
(48)

48
A partir de uma faixa infinitesimal da Figura 18(a) em equilíbrio, teremos a atuação de
esforços internos e momentos fletores a direita e a esquerda da faixa, Figura 18(b), sendo
e , variações de esforços e momentos atuantes de um ponto da esquerda para a direita da
seção. E , a distância da seção feita a direita da faixa, ao ponto de aplicação da carga
distribuída, sendo este último dependente da geometria da carga distribuída , sendo ainda
um valor compreendido no intervalo, .
Figura 18 – Esforços internos causados pela atuação de carregamento em faixa
infinitesimal
A satisfazer o equilíbrio plano das vigas, teremos que satisfazer as condições
suficientes (2), (3) e (4),

49
Logo, a satisfazer o equilíbrio de forças no eixo x, adotando o eixo positivo para a
direita, teremos que,
para o equilibro de forças no eixo y, adotando o eixo positivo para cima, obteremos
(49)
e em relação ao equilíbrio de momento para o eixo (perpendicular ao plano ), adotando o
sentido positivo como sendo aquele saindo do plano da folha ou anti-horário, teremos que,
Sendo que no limite, a geometria da carga distribuída, fará com que , assuma um
valor muito pequeno, desta forma,
(50)
Substituindo (48) em (50),
logo,
(51)

50
Substituindo (51) em (49),
logo,
(52)
Temos assim, pelas equações (52), (51) e (48), as respectivas relações diferenciais das
taxas de variação para as vigas:
A solução de qualquer destas equações requer integrações sucessivas à obtenção da
deflexão da curva elástica, tal que a cada integração, corresponderá uma constante de
integração, que poderá ser determinada por valores de contorno. (HIBBELER, 2010, p. 424)

51
4.2 ESTUDO DE PROBLEMAS DE VALOR DE CONTORNO (PVC) NAS VIGAS
4.2.1 Viga Biapoiada
Considere uma viga de comprimento L, simplesmente apoiada ou bi apoiada (i.e., por
um apoio duplo em A, e um apoio simples em B), e carregamento distribuído q ao longo de
sua extensão, e , e , são as reações causadas pelos apoios, como visto na Figura 19.
Figura 19 – Viga Biapoiada
Temos então, para o equilíbrio de forças externas, pelas condições suficientes (2), (3) e
(4):
Desta forma, a se encontrar as reações de apoio, adotando o sentido a direita positivo,
teremos para o equilíbrio de forças no eixo :
(53)

52
Para o equilíbrio de momento no eixo , perpendicular ao plano, adotando como
sentido positivo aquele que provoca translação no sentido anti-horário, teremos que:
(54)
E ainda para o equilíbrio de força no eixo , adotando como sentido positivo, aquele
orientado para cima, teremos que:
(55)
Realizando uma seção (i.e., corte na estrutura), teremos, para a situação
vista na Figura 20.
Figura 20 – Seção da viga biapoiada
Tal que para o equilíbrio de forças internas, adotando a mesma convenção de sinais
positivas dadas anteriormente
(56)

53
Sendo de acordo com a equação (48),
isolando
,
(57)
Substituindo (56) em (57):
(
)
(58)
Integrando a equação (58) com relação a ,
∫
∫
(
)
∫(
)
(
)
(59)
Fazendo mais uma integração, desta vez à equação (59),
∫
∫
(
)
∫(
)
(
)
(60)
sendo C1 e C2, na equação (60), constantes de integração, que podem ser obtidas a partir das
condições de contorno.

54
Temos para esta viga que em , , e para , , logo
e ainda,
(
)
Substituindo o valor , obtido anteriormente, teremos
(
) (
)
assim,
(
) (
)
Desta forma, substituindo as constantes e , obtidas anteriormente em (60),
encontraremos,
(
)
(61)
que é a equação da linha elástica para a viga biapoiada, Figura 19. A partir desta podemos
encontrar a deflexão máxima para esta viga. A se encontrar o valor de máximo para a
equação, obtemos os pontos críticos da mesma a partir da primeira derivada, tal que o valor de
deflexão máxima, deva estar contido no intervalo , que define o comprimento de
extensão da viga.

55
Temos para a derivada da curva elástica, a equação (59),
(
)
fazendo nesta a substituição do valor de C1,
teremos que
(
)
(
)
(62)
e ainda para a segunda derivada, já encontrada, (58),
(
)
Obtemos os pontos críticos da função , encontrando as raízes da função
, (62), tal
que
se e somente se,
(
) (
)
dado que
.

56
Pondo
em evidência, teremos
assim, teremos ou . Para , teremos,
Observa-se que substituindo
nesta equação, conclui-se que o mesmo é raiz, sendo as
outras duas raízes da função ( √
) e (
√
). Logo,
é a única raiz compreendida dentro
do intervalo , sendo assim o valor da deflexão máxima será compreendido em
.
Substituindo o valor (
) na equação (61), obtemos,
(
)
(
) (
)
(
)
(
)
em módulo teríamos assim,
que é o deslocamento transversal máximo para a viga biapoiada, Figura 19.
Com o valor de deflexão máxima de projeto, pode-se assim projetar a viga, com base
na seleção de material e seu dimensionamento a atender requisitos de segurança ou estética,
sendo o módulo de elasticidade do material escolhido, e o momento de inércia da seção
transversal que depende do dimensionamento da mesma.

57
4.2.2 Viga Engastada
Dada uma viga engastada, sob aplicação de carga distribuída q ao longo de sua
extensão, e ainda aplicação de uma carga concentrada P na sua extremidade, como visto na
Figura 21.
Figura 21 – Viga engastada
Nesta situação para a obtenção da deflexão não se faz necessária a obtenção das
reações de apoio, fazendo-se uma seção em revestrez, como visto na Figura 22, dado já se
conhecer a atuação de todas as cargas a direita desta seção.
Figura 22 – Seção em revestrez da viga engastada
Assim teremos, 0 ≤ x ≤ L, tendo em , a extremidade livre, e em , o apoio
do tipo engaste.

58
Para o equilíbrio de momento fletor, teremos, considerando a mesma convenção de
sinais para equilíbrio de momento fletor adotada na viga biapoiada,
(63)
De acordo com a equação (57),
Substituindo (63) em (57), teremos
(
)
(64)
Integrando a equação (64),
∫
∫
(
)
∫(
)
(
)
(65)
fazendo uma integral sucessiva, obtemos
∫
∫
(
)
∫(
)
(
)
(66)

59
Que é a equação da curva de deflexão para a viga engastada, Figura 21, sendo C1 e C2,
constantes de integração, que podem ser obtidas a partir das condições de contorno. Temos
para esta que em , e
, aplicando-as teremos, em (65),
(
)
logo,
(
) (
)
Assim,
(
) (
)
e ainda, em (66),
(
)
Tal que,
(
) (
)

60
Substituindo (
), obtido anteriormente, teremos
(
(
) ) (
)
(
)
(
)
Substituindo as constantes e , obtidas, em (66),
(
(
) (
))
(67)
que é a equação da linha elástica para a viga engastada, Figura 21, podendo-se determinar
ainda a partir desta, a deflexão máxima para esta viga.
Fazendo o estudo dos pontos críticos para esta curva de deflexão, encontraremos que
dentro do intervalo da seção em revestrez, , teremos a deflexão máxima da
estrutura (i.e., mínima matematicamente), no ponto , desta forma o valor da deflexão
máxima será, aplicando na equação (67), obteremos
(
)
em módulo teremos assim,
que é o valor do deslocamento transversal máximo para a viga engastada, Figura 21, com um
valor de deflexão máxima exigido no projeto, com base em requisitos de segurança e estética,
pode-se projetar a viga, fazendo-se a escolha do material e seu dimensionamento a apresentar
a deflexão máxima exigida no projeto, evitando-se assim danos posteriores.

61
5 CONCLUSÃO
As equações diferenciais se mostraram como uma importante ferramenta para
obtenção da curva de deflexão, evidenciando sua capacidade de aplicação em modelagem. É
possível perceber ainda, que a obtenção da curva elástica a partir das relações diferenciais,
envolvem processos de resolução simples, sendo seu estudo de suma importância para os
estudantes de engenharia, podendo ainda ser incentivada aplicações em outras situações
cotidianas.
Profissionalmente, a obtenção da curva elástica, contribui quanto a visualização
reativa da viga sob atuação de carregamentos, sendo possível ainda, a partir da equação que a
descreve, obter o valor de deflexão máxima, importante no projeto de vigas. Desta forma,
como a curva de deflexão pode ser obtida pela aplicação de equações diferenciais, temos que
estas equações se apresentam como ferramentas de modelagem eficazes para o Engenheiro no
projeto de vigas, atendendo os requisitos de segurança e evitando perdas materiais e humanas.
O trabalho contribuiu para conhecermos a importância do estudo da deflexão de vigas
para efeito de projetos na construção civil, através da obtenção da curva de deflexão, a partir
da utilização de equações diferenciais, como ferramentas de modelagem, onde foram
utilizados conceitos e resultados matemáticos, como geometria euclidiana, trigonometria,
cálculo diferencial e integral, e também conceitos e resultados físicos da mecânica dos
sólidos, envolvendo a resistência dos materiais.

62
REFERÊNCIAS BIBLIOGRÁFICAS
ALMEIDA, M. C. F.; Estruturas Isostáticas / Maria Cascão Ferreira de Almeida. – São
Paulo: Oficina de Textos, 2009.
BEER, F. P. et al.; Mecânica dos Materiais. – 5ª Ed. – São Paulo: AMGH Editora LTDA,
2008. Disponível em:
<http://books.google.com.br/books?id=oYAcxW5iqbIC&printsec=frontcover&dq=ferdinand
+beer+mec%C3%A2nica+dos+materiais&hl=pt-
BR&sa=X&ei=GLlHUYG_IcHo0gG_04DoDg&ved=0CC8Q6AEwAA#v=onepage&q=ferdi
nand%20beer%20mec%C3%A2nica%20dos%20materiais&f=false>. Acesso em 12 de Março
de 2013.
BORGES, A. C. L.; ANÁLISE DE PILARES ESBELTOS DE CONCRETO ARMADO
SOLICITADOS A FLEXO-COMPRESSÃO OBLÍQUA. / Ana Cláudia Leão Borges;
1999. 110 f. Dissertação (Mestrado) - Curso de Engenharia de Estruturas, Departamento de
Partame Nto de Estruturas da Eesc - Usp,, Escola de Engenharia de São Carlos da
Universidade de São Paulo, São Carlos, 1999. Disponível em:
<http://web.set.eesc.usp.br/static/data/producao/1999ME_AnaClaudiaLeaoBorges.pdf>.
Acesso em 31 de Dezembro de 2012.
BOTELHO, M. H. C.; Concreto Armado, eu te amo, volume 1 / Manoel Henrique Campos
Botelho, Osvaldemar Marchetti – 6ª Ed. – São Paulo: Blucher, 2010.
BOYCE, W. E.; Equações Diferenciais elementares e problemas de valores de contorno.
/ William E. Boyce, Richard C. D-Prima; Tradução e revisão Valéria de Magalhães Iório -
Rio de Janeiro: LTC, 2010.
CONGRESSO BRASILEIRO DE ENSINO DE ENGENHARIA, 34., 2006, Passo Fundo.
RESOLUÇÃO DE PROBLEMAS COM EQUAÇÕES DIFERENCIAIS EM CURSOS
DE ENGENHARIA. Passo Fundo: Universidade de Passo Fundo, 2006. Disponível em:
<http://www.abenge.org.br/CobengeAnteriores/2006/artigos/1_142_601.pdf>. Acesso em 06
de Novembro de 2012.
CORTIELHA & DIAS; Comprimento do Arco; Universidade Federal de Minas Gerais,
Instituto de Ciências Exatas; Fundamentos de geometria plana e desenho geométrico.
FIGUEIREDO, D. G.; Equações Diferenciais Aplicadas / Djairo Guedes de Figueiredo,
Aloisio Freire Neves – 3ªEd. – Rio de Janeiro: IMPA, 2010.
FONSECA, A.; Curso de Mecânica: estática, volume 1 / Adhemar Fonseca – 3ª Ed. – Rio
de Janeiro: Livros Técnicos e Científicos Editora S.A., 1978.
GAZIRE, E. S.; LAUDARES, J. B.; ALVES, M. B.; Resolução de Problemas com equações
diferenciais em cursos de engenharia; Anais do XXXIV COBENGE. Passo Fundo:
Universidade de Passo Fundo, Setembro de 2006.

63
GUIDORIZZI, H. L.; Um curso de cálculo: volume 1 / Hamilton Luiz Guidorizzi. – 5ª Ed. –
Rio de Janeiro: LTC, 2011. 1 v.
HIBBELER, R. C.; Estática: Mecânica para engenharia. / Tradução Daniel Vieira – 12ª Ed. –
São Paulo: Pearson Prentice Hall, 2011.
HIBBELER, R. C.; Resistência dos Materiais / Tradução Arlete Simille Marques; Revisão
técnica Sebastião Simões da Cunha Jr. – 7ª Ed. – São Paulo: Pearson Prentice Hall, 2010.
KREYSZIG, E.; Matemática Superior, volume 1; equações diferenciais ordinárias / Erwin
Kreyzig / Tradução de Alfredo Alves de Farias – 2ª Ed. – Rio de Janeiro: LTC, 1983.
MCCORMAC, J. C.; Análise estrutural: usando métodos clássicos e métodos matriciais /
Jack C. McCormac; tradução e revisão técnica Amir Kurban. – 4ª Ed. – Rio de Janeiro: LTC,
2009.
M.E.; Matemática Essencial, Ensino: Fundamental, Médio e Superior. Ensino Fundamental:
Geometria: Conceitos básicos: Retas transversais e ângulos; Retas paralelas e constr. com
régua e compasso. Disponível em:
<http://pessoal.sercomtel.com.br/matematica/fundam/geometria/geo-basico.htm>. Acesso em
14 de Abril de 2013.
MENEZES, L. M. R.; GAMA, E. D. P.; Equações diferenciais aplicadas à flexão de vigas;
Curso de Engenharia Civil – Universidade Tiradentes. Disponível em:
<http://www.slideshare.net/lucass_menezes/equaes-diferenciais-aplicada-flexao-de-vigas>.
Acesso em 05 de novembro de 2012.
MERIAM, J. L.; KRAIGE, L.; Mecânica para engenharia: estática; Tradução e revisão
técnica José Roberto Moraes d’Almeida, Sidnei Paciornik. – 6ª Ed. – Rio de Janeiro: LTC,
2011. 1 v.
NAGLE, R. K.; SAFF, Edward B.; SNIDER, A. D. Equações Diferenciais. / Tradução
Daniel Vieira – 8ª Ed. – São Paulo: Pearson Education do Brasil, 2012.
RESNICK, R.; Física 1 / Robert Resnick, David Halliday, Kenneth S. Krane; com a
colaboração de Paul Stanley; tradução Pedro Manuel Calas Lopes Pacheco… [et al.] –
[Reimpr.]. – Rio de Janeiro: LTC, 2011.
ROY R. CRAIG, JR.; Mecânica dos materiais; tradução José Roberto de Moraes d’Almeida,
Sidnei Paciornik, Verônica Calado. – 2ª Ed. – Rio de Janeiro: LTC, 2003.
SIMMONS, G. F.; Cálculo com geometria analítica: volume 1. / Tradução Seiji Hariki, e
revisão técnica Rodney Carlos Bassanezi, Silvio de Alencastro Pregnolatto – São Paulo:
Pearson Makron Books, 1987.
SÜSSEKIND, J. C.; Curso de Análise Estrutural, volume 1 / José Carlos Süssekind. – 6ª
Ed. – Porto Alegre – Rio de Janeiro: Globo, 1981.
WREDE, K.; SPIEGEL, M.. Teoria e problemas de cálculo avançado. / K. Wrede e M.
Spiegel; Tradução Adonai Schlup Sant’Anna – 2ª Ed. – Porto Alegre: Bookman, 2004.

64
ZILL, D. G.; Equações Diferenciais com aplicações em modelagem, tradução da 9ª edição
norte-americana / Dennis G Zill; Tradução Cyro de Carvalho Patarra, Heitor Honda Federico;
Revisão técnica Luiza Maria Oliveira da Silva. – 2ª Ed. – São Paulo: Cengage Learning, 2011.