universidade federal do rio grande do norte centro de … · 2017-11-03 · multicanal e da...
TRANSCRIPT

UNIVERSIDADE FEDERAL DO RIO GRANDE DO NORTE CENTRO DE CIÊNCIAS EXATAS E DA TERRA PROGRAMA DE PESQUISA E PÓS-GRADUAÇÃO EM GEODINÂMICA E GEOFÍSICA
DISSERTAÇÃO DE MESTRADO
COMPARAÇÃO DE DESEMPENHO DA DECONVOLUÇÃO PREDITIVA MULTICANAL E DA FILTRAGEM F-K NA ATENUAÇÃO
DE MÚLTIPLAS DO FUNDO DO MAR
Autor:
MARCOS AUGUSTO LIMA DA LUZ
Orientador:
Prof. Dr. Walter Eugênio de Medeiros
DGEF / PPGG / UFRN
Co-Orientadora:
Profa. Dra. Rosangela Corrêa Maciel
DGEF / PPGG / UFRN
Dissertação nº 117/PPGG
NATAL, 18 de dezembro de 2012

ii
UNIVERSIDADE FEDERAL DO RIO GRANDE DO NORTE
CENTRO DE CIÊNCIAS EXATAS E DA TERRA
PROGRAMA DE PÓS-GRADUAÇÃO EM GEODINÂMICA E
GEOFÍSICA
DISSERTAÇÃO DE MESTRADO
COMPARAÇÃO DE DESEMPENHO DA DECONVOLUÇÃO PREDITIVA
MULTICANAL E DA FILTRAGEM F-K NA ATENUAÇÃO DE MÚLTIPLAS DO
FUNDO DO MAR
Autor:
MARCOS AUGUSTO LIMA DA LUZ
Comissão Examinadora:
Prof. Dr. Walter Eugênio de Medeiros (Orientador - DGEF / PPGG / UFRN) Prof. Dr. José Antonio de Morais Moreira (DGEF / PPGG / UFRN)
Profa. Dr. Ellen de Nazaré Souza Gomes (CPGF / UFPA)
NATAL, 18 de dezembro de 2012
Dissertação de Mestrado apresentada
em 18/12/2012, ao Programa de
Pesquisa e Pós-Graduação em
Geodinâmica e Geofísica – PPGG, da
Universidade Federal do Rio Grande
do Norte - UFRN como requisito à
obtenção do titulo de Mestre em
Geodinâmica e Geofísica, com área
de concentração em Geofísica.

iii
AGRADECIMENTOS
Desde já agradeço a todos que ajudaram direta ou indiretamente no
desenvolvimento desse trabalho. E peço desculpas por não citar todos nesta
humilde relação de agradecimentos.
Agradeço primeiramente a DEUS por ter permitido que tudo isso
acontecesse.
A meus pais, José Augusto e Maria Secundina, irmãos Márcio Rodrigo e
Márcia Cristina, e minha filha Marcele Lorena, que nunca mediram esforços
para me apoiar nos desafios da vida, mesmo estando longe estão sempre
torcendo pela minha felicidade, sou muito grato a essa família maravilhosa que
Deus me deu.
Aos meus vizinhos Maria de Fátima e família, pelo apoio incondicional
durante todo o tempo em que nos conhecemos, sempre incentivando e
reconhecendo meu desempenho em tudo que faço.
E não menos importante minha cadela (pitbull) Sheron, que está sempre
disposta a me ajudar nas caminhadas e defender a todos da família.
A minha fiel companheira, esposa e a cima de tudo amiga Rosana
Nascimento, que está do meu lado desde o primeiro momento em que iniciei
essa jornada, sorrindo nos bons momentos e chorando nos momentos difíceis,
mas sempre acreditando dando-me força e esperança para seguir sempre em
frente. Uma mulher sem igual, otimista muito inteligente e que será a mãe dos
meus filhinhos.
Ao meu orientador Professor Dr. Walter Eugênio de Medeiros, que
mesmo tendo muito trabalho, também teve paciência e compreensão para me
orientar e fazer com que tudo isso tivesse um real significado e convergisse
para um bem comum.
A minha co-orientadora Professora Dra. Rosângela Corrêa Maciel, que
foi incansável nos momentos cruciais para o término do trabalho, se
empenhando e acreditando que no final tudo daria certo.
A Secretária do PPGG Nilda de Araújo Lima, que é uma pessoa sem
igual um anjo que chegou para fazer a diferença na vida acadêmica de todos
que passam pelo PPGG, todos os elogios existentes são poucos para ao
menos tentarem qualificar/definir sua maravilhosa pessoa. Uma amiga

iv
incomparável e para todos os momentos.
Ao Professor e amigo Dr. Zorano Sérgio de Souza, que contribuiu com
bons conselhos dando-me muito apoio para continuar em frente e nunca
desistir, lhe sou muito grato porque sem sua ajuda tudo havia parado há muito
tempo, sua competência fez a diferença.
Ao Professor Dr. Carlos César Nascimento da Silva, que em um dos
momentos mais tensos deste trabalho acreditou, se preocupou e tomou a
frente, influenciando em minhas decisões e fazendo com que escolhesse o
caminho certo.
Ao Professor Dr. Francisco Hilário Rêgo Bezerra, por ter ministrado a
melhor disciplina do curso e ter sido um grande colaborador deste trabalho.
A todos os colegas do PPGG, em especial aos que participaram de
grande parte das aflições como: Ângelo Masayoshi (o japa), Anderson Santiago
(o carteiro), Lucyanno Reis (o árvore), Rafael Saraiva e Júlia Malta.
Ao grande amigo João Andrade dos Reis Júnior (o Bart), que foi quem
me incentivou a participar da seleção para o mestrado, desencadeando essa
jornada. Acreditou que eu seria capaz mesmo no momento em que eu pensava
em desistir, desse modo essa vitória é sua também.
A minha amiga Maria de Fátima Alves de Matos, que me ajudou assim
que cheguei, vendendo tudo que tinha por um preço simbólico facilitando muito
minha vida em Natal.
Aos funcionários Jean Carlos dos Santos, Denilson Alves Gomes e ao
vigilante José Deodato Batista Cordeiro, que sempre colaboraram mantendo
nosso ambiente de trabalho limpo, confortável e seguro, possibilitando o
desenvolvimento de muitos trabalhos.
Ao Programa de Pós-Graduação em Geodinâmica e Geofísica (PPGG)
pela oportunidade de cursar este mestrado.
A PETROBRAS, FINEP, CNPq e INCT-GP pelo financiamento.
Ao Departamento de Geofísica pelo espaço concedido.
Aos pesquisadores do LAGEP-CPGG-UFBA por disponibilizarem os
algoritmos usados na DPM.
Ao CNPq pela bolsa concedida.

v
RESUMO
A sísmica de reflexão é utilizada em grande escala na exploração de
petróleo. No caso de aquisição marinha, devido ao alto contraste de
impedância nas interfaces água/ar, podem ocorrer eventos de reflexão múltipla.
Tais múltiplas podem mascarar eventos primários, sendo necessário atenuá-las
para facilitar o processo de interpretação. Neste trabalho faremos a
comparação usando dados sintéticos e reais de duas técnicas de atenuação de
múltiplas: a deconvolução preditiva multicanal do tipo Wiener-Levinson (DPM) e
a filtragem F-K. A primeira técnica é baseada na periodicidade das múltiplas
enquanto a segunda é baseada nas diferenças de mergulho dos eventos. A
DPM foi aplicada em famílias de afastamento comum e a filtragem F-K em
famílias CDP. Constatamos que a eficiência da técnica DPM é bastante
sensível à identificação correta do período e do tamanho do filtro. Por sua vez,
a filtragem F-K é bastante sensível à escolha da velocidade adequada para
separar as múltiplas dos eventos primários. A DPM é uma técnica que é focada
num dado evento; quando bem parametrizada, ela é bastante eficiente para
remover a múltipla especificada, podendo ter atuação menos eficiente em
outras múltiplas. A DPM pode ser então otimizada aplicando-se a técnica várias
vezes, em cada vez com uma diferente parametrização. Uma deficiência da
técnica DPM é quando há sobreposição de múltiplas com eventos primários,
em que a DPM pode remover também uma parcela do evento primário. Por sua
vez, a filtragem F-K tem aproximadamente o mesmo desempenho em todas as
múltiplas que estejam localizadas em um mesmo setor do espectro F-K. As
duas técnicas podem ser combinadas de modo a tomar partido do potencial de
cada uma delas, aplicando-se primeiro a técnica DPM, focada na múltipla do
fundo do mar, seguida da filtragem F-K para a atenuação das demais múltiplas.
Palavra-chaves: atenuação de múltiplas, deconvolução, processamento
sísmico.

vi
ABSTRACT
The seismic reflection is used on a large scale in oil exploration. In case
of marine acquisition the presence of high impedance contrast at the interfaces
water/air generates multiple reflections events. Such multiple events can mask
primary events; thus from the interpretational viewpoint it is necessary to
mitigate the multiples. In this manuscript we compare two methods of multiple
attenuation: the predictive multichannel deconvolution (DPM) and the F-K
filtering (FKF). DPM is based in the periodicity of the multiples while FKF is
based in multiples and primaries splitting in F-K domain. DPM and FKF were
applied in common-offset and CDP gathers, respectively. DPM is quite sensible
to the correct identification of the period and size of the filter while FKF is quite
sensible to an adequate choice of the velocity in order to split multiples and
primaries events in the F-K domain. DPM is a method that is designed to act
over a specific event. So, when the parameters are well selected, DPM is very
efficient in removing the specified multiple. Then DPM can be optimized by
applying it several times, each time with a different parameterization. A
deficiency of DPM occurs when a multiple is superposed to a primary event: in
this situation, DPM can attenuate also the primary event. On the other hand,
FKF presents almost the same performance to all multiples that are localized in
the same sector of the F-K domain. The two methods can be combined in order
to take advantage of their associated potentials. In this situation, DPM is firstly
applied, with a focus in the sea bed multiples. Then FKF is applied in order to
attenuate the remaining multiples.
Keywords: multiple attenuation, deconvolution, seismic processing.

vii
LISTA DE FIGURAS
FIGURA 01: a) Múltiplas de curto percurso e b) Múltiplas de longo percurso..04
FIGURA 02: a) Múltiplas simétricas e b) Múltiplas assimétricas.......................05
FIGURA 03: a) Múltiplas de superfície, de primeira e segunda ordem e b)
Múltiplas internas...............................................................................................06
FIGURAS-MANUSCRITO.
FIGURA 1: Modelos sintéticos: (a) SS – fundo do mar com geometria simples e
geologia com geometria também simples, (b) SC – fundo do mar com
geometria simples e geologia com geometria complexa, (c) CS – fundo do mar
com geometria complexa e geologia com geometria simples e (d) CC – fundo
do mar com geometria complexa e geologia com geometria também
complexa............................................................................................................32
FIGURA 2: Família de tiro comum 168 – para cada modelo: (a) fundo do mar
com geometria simples e geologia com geometria também simples, (b) fundo
do mar com geometria simples e geologia com geometria complexa, (c) fundo
do mar complexo com geologia complexa e (d) fundo do mar com geometria
complexa e geologia com geometria também complexa...................................33
FIGURA 3: Painel de afastamento comum (AC), modelo fundo do mar com
geometria complexa e geologia com geometria também complexa (CC): (a)
original e (b) após a aplicação da DPM.............................................................34
FIGURA 4: Painéis de espectro F-K: (a) antes da filtragem F-K, (b) após a
filtragem F-K, e (c) após a filtragem F-K e remoção da correção de NMO.......35
FIGURA 5: Painel em CDP do modelo fundo do mar com geometria complexa e
geologia com geometria também complexa (CC): (a) original e (b) após a
viii
aplicação da filtragem F-K.................................................................................36
FIGURA 6: Seção empilhada, modelo fundo do mar com geometria simples e
geologia com geometria também simples (SS): (a) original, (b) após a DPM e
(c) após a filtragem F-K.....................................................................................37
FIGURA 7: Seção empilhada, modelo fundo do mar com geometria simples e
geologia com geometria complexa (SC): (a) original, (b) após a DPM e (c) após
a filtragem F-K...................................................................................................38
FIGURA 8: Seção empilhada, modelo fundo do mar com geometria complexa e
geologia com geometria simples (CS): (a) original, (b) após a DPM e (c) após a
filtragem F-K......................................................................................................39
FIGURA 9: Seção empilhada, modelo fundo do mar com geometria complexa e
geologia com geometria também complexa (CC): (a) original, (b) após a DPM e
(c) após a filtragem F-K.....................................................................................40
FIGURA 10: painel utilizado para obtenção do campo de velocidades.............41
FIGURA 11: Seções de afastamento comum (AC) mínimo: (a) antes da DPM e
(b) após a DPM..................................................................................................42
FIGURA 12: Painel demonstrando a obtenção das velocidades RMS
intermediárias do CDP 1640..............................................................................43
FIGURA 13: Painéis de espectro de frequência: (a) antes da filtragem F-K (b)
espectro F-K, espectro mais forte do lado direito correspondente às reflexões
primárias e o esquerdo zerado para eliminar as múltiplas e (b) filtrado após
correção de NMO inverso..................................................................................44
FIGURA 14: Painel de CDP: (a) original e (b) após a filtragem F-K com campo
de velocidade intermediária...............................................................................45
FIGURA 15: Seção empilhada: (a) original, (b) após a DPM e (c) após a

ix
filtragem F-K......................................................................................................46
FIGURA 16: Seção empilhada com ambas as filtragens DPM e FK................47
LISTA DE TABELAS
TABELA 1: Parâmetros de aquisição do dado sintético....................................31
TABELA 2: Parâmetros de aquisição do conjunto de dados marinhos do Golfo
do México...........................................................................................................31

x
SUMÁRIO
Agradecimento....................................................................................................iii
Resumo................................................................................................................v
Abstract...............................................................................................................vi
Lista de figuras...................................................................................................vii
Lista de tabelas...................................................................................................ix
CAPÍTULO I – INTRODUÇÃO...........................................................................01
CAPÍTULO II– CONTEXTUALIZAÇÃO DO PROBLEMA..................................03
2.1 - Objetivo .....................................................................................................03
2.2 - Ambiente de estudo...................................................................................03
2.3 - Reflexões múltiplas....................................................................................03
2.3.1 - Classificações das reflexões múltiplas...................................................04
2.3.2 - Propriedades das reflexões múltiplas.....................................................06
2.4 - Métodos utilizados neste trabalho para a atenuação de múltiplas do fundo
do mar..........................................................................................................08
CAPÍTULO III – MANUSCRITO SUBMETIDO - COMPARAÇÃO DE
DESEMPENHO DA DECONVOLUÇÃO PREDITIVA MULTICANAL E DA
FILTRAGEM F-K NA ATENUAÇÃO DE MÚLTIPLAS DO FUNDO DO
MAR...................................................................................................................09
REFERÊNCIAS BIBLIOGRÁFICAS..................................................................49
ANEXO A ..........................................................................................................51
ANEXO B...........................................................................................................57
1
CAPÍTULO I – INTRODUÇÃO
A sísmica de reflexão é utilizada em grande escala tanto em ambiente
marítimo como terrestre na exploração de petróleo (SENTI, 1988). No caso de
aquisição marítima, devido ao alto contraste de impedância nas interfaces
água/ar, podem ocorrer eventos de reflexão múltipla, que mascaram outros
eventos primários, dificultando a sua interpretação. Assim, do ponto de vista da
interpretação, a múltipla é considerada um ruído, sendo necessário atenuá-la
ou suprimi-la.
As múltiplas apresentam características e propriedades específicas, entre
as quais podemos destacar velocidade, frequência, espalhamento geométrico,
inclinação e periodicidade (GAMBOA, 2003). Essas características permitem
distinguir as reflexões primárias das múltiplas e fornecem a base dos
algoritmos de atenuação utilizados. Vários algoritmos têm sido desenvolvidos
para realizar essa tarefa, a exemplo de deconvolução preditiva, SRME
(surface-related multiple elimination), supressão preditiva e adaptativa, e
transformadas F-K e de Radon (VERSCHUUR, 2006).
Neste trabalho faremos a comparação de duas técnicas de atenuação
de múltiplas, a saber: (1) a deconvolução preditiva multicanal (DPM) do tipo
Wiener-Levinson (TWL), que é uma generalização do caso monocanal, fazendo
a substituição dos escalares por matrizes (PORSANI, 1997, PORSANI &
URSIN, 2007); e (2) a filtragem F-K (YILMAZ, 1987) que faz uso das
transformadas direta e inversa de Fourier. O primeiro tipo de técnica é baseado
na periodicidade das múltiplas (ROBINSON & TREITEL, 1980; PORSANI,
1997) enquanto o segundo tipo de técnica é baseado nas diferenças de
mergulho dos eventos. Ambas as técnicas já foram aplicadas para atenuar
múltiplas, a exemplo de Lima (1999), Bezerra (2001), Santos Jr. (2002) e
Maciel (2007) para os algoritmos TWL e Ryu (1982) e Gamboa (2003) para a
filtragem F-K. O foco do presente trabalho é na comparação do desempenho
dessas duas técnicas em ambiente marinho. Iremos utilizar dados sintéticos
gerados com modelos onde a complexidade da batimetria do fundo do mar e
da geologia da área imageada foi variada. A deconvolução preditiva foi aplicada
em famílias de afastamento comum e a filtragem F-K em famílias CDP.

2
O algoritmo tipo Wiener-Levinson aplica a recursão de Levinson
diretamente ao traço sísmico gerando e atualizando vetores de erro direto e
reverso, onde o vetor de erro direto obtido ao final da recursão constitui o traço
sísmico deconvolvido (SANTOS JR. 2002; PORSANI & URSIN 2007). Na
prática, isto significa efetuar a deconvolução preditiva sem a necessidade de
calcular os elementos do filtro ou da autocorrelação ou correlação cruzada dos
traços sísmicos. Utilizamos algoritmos desenvolvidos e disponibilizados por
pesquisadores do CPGG-UFBA.
Fazendo uso da transformada de Fourier é possível decompor o campo
de onda original no domínio t-x (tempo-distância) em suas componentes no
domínio F-K (freqüência-número de ondas), de forma em que os dados
sísmicos de entrada são transformados em uma imagem de densidade de
energia.
A dissertação está organizada da seguinte maneira. Primeiro,
apresentamos a contextualização do problema e os fundamentos teóricos de
ambos os métodos. Em seguida, mostraremos o artigo com os resultados da
aplicação de ambos em dados sintéticos e, por último, em dados reais, em
cada caso apresentando uma análise comparativa de desempenho. Por fim,
temos os anexos.

3
CAPÍTULO II - CONTEXTUALIZAÇÃO DO PROBLEMA
2.1 - Objetivo.
O objetivo principal dessa dissertação é comparar o desempenho da
deconvolução preditiva multicanal usando algoritmos tipo Wiener-Levinson e
com a filtragem F-K, quando aplicados em dados sísmicos sintéticos e reais.
Os dados sintéticos foram desenvolvidos buscando simular diferentes
geometrias do fundo marinho, assim como da geologia em subsuperfície, em
diferentes níveis de complexidade de forma a avaliarmos o desempenho de
ambas as técnicas de filtragem diante de cada conFiguração de cada tipo de
modelo.
Já a aplicação ao dado sísmico real do Golfo do México permitiu
identificar as principais características, formas de aplicações e principalmente
as limitações de cada técnica.
2.2 - Ambiente de estudo.
Tanto para simular os dados sísmicos sintéticos como para processar os
dados sísmicos (sintéticos e reais), utilizou-se o software livre Seismic Unix
(SU) (COHEN et al., 1999). O SU é executado no sistema Linux e é composto
por um conjunto de sub-rotinas desenvolvidas pelo Center of Wave Phenomena
(CWP) da Colorado School of Mines.
Foram utilizados também programas na linguagem Fortran desenvolvidas
e disponibilizadas pelos pesquisadores do CPGG/UFBA, no que se refere à
técnica de deconvolução preditiva.
2.3 - Reflexões Múltiplas.
A sísmica de reflexão é um método geofísico que utiliza a propagação de
ondas para imagear as estruturas geológicas em sub-superfície. Antes de seu
registro, a onda se propaga pelas camadas em sub-superfície sofrendo uma

4
série de fenômenos e interferências que alteram a sua amplitude e frequência.
Nesse trânsito, parte da energia transmitida pode ficar reverberando, durante
certo tempo, em algumas camadas onde o contraste de velocidade é muito
grande. Assim, na seção sísmica, essas reflexões são referenciadas como
Reflexões Múltiplas ou apenas Múltiplas.
Em ambiente marinho Weglein et al (1997), definem múltiplas associadas
à superfície do mar como eventos que possuem pelo menos uma reflexão
descendente na superfície livre do mar entre duas reflexões ascendentes.
2.3.1 - Classificações das reflexões múltiplas.
As múltiplas podem ser classificadas quanto ao tempo de percurso, à
simetria, origem e ordem (número de reflexões).
Quanto ao tempo de percurso, temos as múltiplas de curto (peg-legs) e
longo percurso. Onde as de curto percurso, não produzem eventos separados
e se somam as primárias enlarguecendo seu pulso, surgem geralmente de
reverberações em camadas finas e de alto contraste de impedância acústica
quando comparadas com as camadas adjacentes. Esse tipo de evento pode
ser visto na Figura 01 a. E as de longo percurso são aquelas que possuem
uma trajetória longa quando comparadas à trajetória das reflexões primárias,
possuindo um grande intervalo de repetições e gerando um pulso discreto no
traço sísmico, Figura 01 b.
Fig. 01: a) Múltiplas de curto percurso e b) Múltiplas de longo percurso. (VERSCHUUR, 2006).
(a) (b)
5
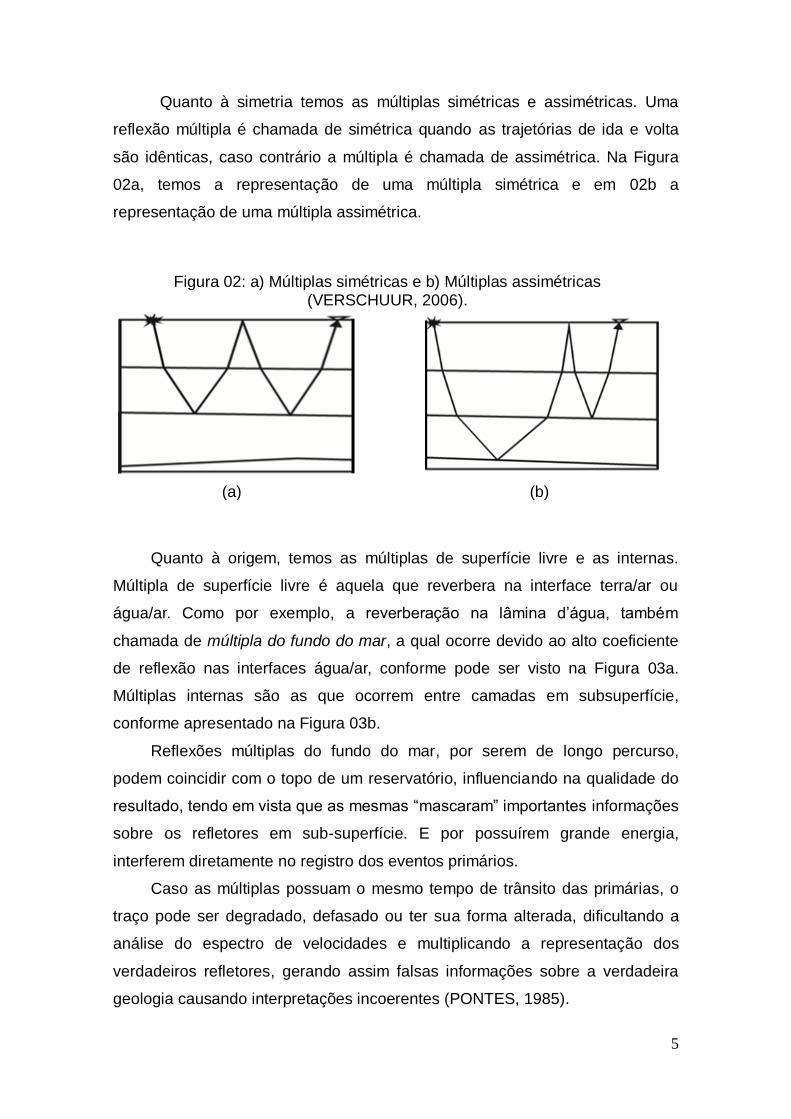
Quanto à simetria temos as múltiplas simétricas e assimétricas. Uma
reflexão múltipla é chamada de simétrica quando as trajetórias de ida e volta
são idênticas, caso contrário a múltipla é chamada de assimétrica. Na Figura
02a, temos a representação de uma múltipla simétrica e em 02b a
representação de uma múltipla assimétrica.
Quanto à origem, temos as múltiplas de superfície livre e as internas.
Múltipla de superfície livre é aquela que reverbera na interface terra/ar ou
água/ar. Como por exemplo, a reverberação na lâmina d’água, também
chamada de múltipla do fundo do mar, a qual ocorre devido ao alto coeficiente
de reflexão nas interfaces água/ar, conforme pode ser visto na Figura 03a.
Múltiplas internas são as que ocorrem entre camadas em subsuperfície,
conforme apresentado na Figura 03b.
Reflexões múltiplas do fundo do mar, por serem de longo percurso,
podem coincidir com o topo de um reservatório, influenciando na qualidade do
resultado, tendo em vista que as mesmas “mascaram” importantes informações
sobre os refletores em sub-superfície. E por possuírem grande energia,
interferem diretamente no registro dos eventos primários.
Caso as múltiplas possuam o mesmo tempo de trânsito das primárias, o
traço pode ser degradado, defasado ou ter sua forma alterada, dificultando a
análise do espectro de velocidades e multiplicando a representação dos
verdadeiros refletores, gerando assim falsas informações sobre a verdadeira
geologia causando interpretações incoerentes (PONTES, 1985).
Figura 02: a) Múltiplas simétricas e b) Múltiplas assimétricas (VERSCHUUR, 2006).
(a) (b)

6
Já a classificação quanto à ordem, ocorre com base no número de
reflexões descendentes que o raio sofreu na superfície de referência antes de
ser detectada pelos receptores. Num registro no qual as reflexões primárias já
possuem certo mergulho, as múltiplas podem ser reconhecidas pelo aumento
desse mergulho, sendo assim quanto maior a ordem da múltipla maior o
aumento no mergulho inicial.
Outro tipo de múltipla geralmente registrada nos dados de levantamentos
marinhos são aquelas causadas pelas reflexões fantasmas. É um efeito que
acontece quando uma fonte pontual em uma profundidade z = z0 no tempo t =
0 emite energia em todas as direções até o instante que a onda propagada
atinge a interface água/ar sofrendo reflexão. A partir daí, o pulso descendente
inicial passa a ser acompanhado por um pulso defasado, de polaridade
invertida com relação ao primeiro (DRAGOSET, 2000).
2.3 - propriedades das Múltiplas.
2.3.2 – Propriedades das reflexões múltiplas.
As reflexões múltiplas possuem propriedades que propiciam seu
diferenciamento das primárias. Dessa forma, podemos distingui-las e então
depois de modeladas, podemos subtraí-las dos dados sísmicos. Entre estas
propriedades podemos destacar: a velocidade, a frequência, o espalhamento
geométrico, a inclinação e a periodicidade (GAMBOA, 2003).
(a) (b)
Figura 03: a) Múltiplas de superfície, de primeira e segunda ordem e b) Múltiplas internas (VERSCHUUR, 2006).

7
Velocidade – As múltiplas do fundo do mar, na maioria das vezes,
apresentam velocidades mais baixas que sua concorrente primária, o
que significa que o tempo de trânsito ou moveout das múltiplas é maior
que o da primária. Onde a partir dessa característica estão baseados
vários métodos de atenuação de múltiplas como, filtragem F-K,
transformada Radon e filtragem T-X.
Frequência das múltiplas – Outra característica marcante é o maior
conteúdo de frequência apresentado pelas reflexões múltiplas, se
comparadas às primarias. No caso particular das múltiplas de
superfície livre, o efeito da absorção na camada de água é menor do
que nas rochas. Como o coeficiente de absorção possui uma relação
inversamente proporcional à frequência, espera-se que o conteúdo de
frequências das múltiplas superficiais seja superior ao das primárias
num mesmo tempo de reflexão.
Espalhamento Geométrico (ou divergência esférica) – Também,
relacionado à propagação (trajetória) das reflexões primarias e
múltiplas. É menor nas múltiplas, especialmente superficiais, que em
uma primária concorrente. Pois é a diminuição da amplitude do sinal
devido à expansão da frente de onda.
Inclinação – As reflexões múltiplas apresentam aumento no mergulho
quando as interfaces sísmicas apresentam certa inclinação. E quanto
maior a ordem da múltipla, maior será o mergulho apresentado por ela.
Periodicidade – Por último, podemos mencionar a propriedade de
periodicidade que a múltipla apresenta quando as identificamos em
uma seção de afastamento mínimo, propriedade que as primárias não
apresentam. Através desta propriedade, é possível prever o
comportamento da múltipla no tempo, modelá-las e subtraí-las dos
dados sísmicos.

8
2.4 - Métodos utilizados neste trabalho para a atenuação de múltiplas do
fundo do mar.
Neste trabalho investigamos o desempenho da deconvolução preditiva
multicanal do tipo Wiener-Levinson e da filtragem F-K para atenuação de
eventos múltiplos do fundo do mar.
No capítulo III apresentamos a forma de aplicação e resultados para
ambas as técnicas aplicadas. E nos Anexos A e B estão os fundamentos
matemáticos da deconvolução preditiva mono e multicanal.
9
CAPÍTULO III – MANUSCRITO SUBMETIDO
COMPARAÇÃO DE DESEMPENHO
DA DECONVOLUÇÃO PREDITIVA MULTICANAL E DA FILTRAGEM F-K
NA ATENUAÇÃO DE MÚLTIPLAS DO FUNDO DO MAR
Marcos A. L. da Luz(1), Rosângela C. Maciel(1)(2)(3)(*), Walter E. Medeiros(1)(2)(3)
(1) Programa de Pós-graduação em Geodinâmica e Geofísica – UFRN
(2) Departamento de Geofísica
UFRN – Universidade Federal do Rio Grande do Norte
Centro de Ciências Exatas e da Terra
59.072-970, NATAL, RN, BRAZIL
Phone: 55 84 33422237
(3) INCT-GP, Instituto Nacional em Ciência e Tecnologia em Geofísica do
Petróleo (CNPq), Brazil, at http://www.cnpq.br/
(*) Corresponding author. E-mail: [email protected]

10
ABSTRACT
The seismic reflection is used on a large scale in oil exploration. In case of
marine acquisition the presence of high impedance contrast at the interfaces
water/air and generates multiple reflections events. Such multiple events can
mask primary events; thus from the interpretational viewpoint it is necessary to
mitigate the multiples. In this manuscript we compare two methods of multiple
attenuation: the predictive multichannel deconvolution (DPM) and the F-K
filtering (FKF). DPM is based in the periodicity of the multiples while FKF is
based in multiples and primaries splitting in F-K domain. DPM and FKF were
applied in common-offset and CDP gathers, respectively. DPM is quite sensible
to the correct identification of the period and size of the filter while FKF is quite
sensible to an adequate choice of the velocity in order to split multiples and
primaries events in the F-K domain. DPM is a method that is designed to act
over a specific event. So, when the parameters are well selected, DPM is very
efficient in removing the specified multiple. Then DPM can be optimized by
applying it several times, each time with a different parameterization. A
deficiency of DPM occurs when a multiple is superposed to a primary event: in
this situation, DPM can attenuate also the primary event. On the other hand,
FKF presents almost the same performance to all multiples that are localized in
the same sector of the F-K domain. The two methods can be combined in order
to take advantage of their associated potentials. In this situation, DPM is firstly
applied, with a focus in the sea bed multiples. Then FKF is applied in order to
attenuate the remaining multiples.
Keywords: multiple attenuation, deconvolution, seismic processing.

11
RESUMO
A sísmica de reflexão é utilizada em grande escala na exploração de petróleo.
No caso de aquisição marinha, devido ao alto contraste de impedância nas
interfaces água/ar, podem ocorrer eventos de reflexão múltipla. Tais multiplas
podem mascarar eventos primários, sendo necessária atenuá-las para facilitar
o processo de interpretação. Neste manuscrito faremos a comparação usando
dados sintéticos e reais de duas técnicas de atenuação de múltiplas: a
deconvolução preditiva multicanal do tipo Wiener-Levinson (DPM) e a filtragem
F-K. A primeira técnica é baseada na periodicidade das múltiplas enquanto a
segunda é baseada nas diferenças de mergulho dos eventos. A DPM foi
aplicada em famílias de afastamento comum e a filtragem F-K em famílias
CDP. Constatamos que a eficiência da técnica DPM é bastante sensível à
identificação correta do período e do tamanho do filtro. Por sua vez, a filtragem
F-K é bastante sensível à escolha da velocidade adequada para separar as
múltiplas dos eventos primários. A DPM é uma técnica que é focada num dado
evento; quando bem parametrizada, ela é bastante eficiente para remover a
múltipla especificada, podendo ter atuação menos eficiente em outras
múltiplas. A DPM pode ser então otimizada aplicando-se a técnica várias vezes,
em cada vez com uma diferente parametrização. Uma deficiência da técnica
DPM é quando há sobreposição de múltiplas com eventos primários, em que a
DPM pode remover também uma parcela do evento primário. Por sua vez, a
filtragem F-K tem aproximadamente o mesmo desempenho em todas as
múltiplas que estejam localizadas em um mesmo setor do espectro F-K. As
duas técnicas podem ser combinadas de modo a tomar partido do potencial de
cada uma delas, aplicando-se primeiro a técnica DPM, focada na múltipla do
fundo do mar, seguida da filtragem F-K para a atenuação das demais múltiplas.

12
Palavra-chaves: atenuação de múltiplas, deconvolução, processamento
sísmico.

13
INTRODUÇÃO
A sísmica de reflexão é utilizada em grande escala tanto em ambiente
marítimo como terrestre na exploração de petróleo (SENTI, 1988). No caso de
aquisição marítima, devido ao alto contraste de impedância nas interfaces
água/ar e água/fundo do mar, podem ocorrer eventos de reflexão múltipla, que
mascaram outros eventos primários, dificultando a sua interpretação. Assim, do
ponto de vista da interpretação, a múltipla é considerada um ruído, sendo
necessário atenuá-la ou suprimi-la.
As múltiplas apresentam características e propriedades específicas, entre
as quais podemos destacar velocidade, frequência, espalhamento geométrico,
inclinação e periodicidade (GAMBOA, 2003). Essas características permitem
distinguir as reflexões primárias das múltiplas e fornecem a base dos
algoritmos de atenuação utilizados. Vários algoritmos têm sido desenvolvidos
para realizar essa tarefa, a exemplo de deconvolução preditiva, SRME
(surface-related multiple elimination), supressão preditiva e adaptativa, e
transformadas F-K e de Radon (VERSCHUUR, 2006).
Neste manuscrito faremos a comparação de duas técnicas de atenuação
de múltiplas, a saber: (1) a deconvolução preditiva multicanal (DPM) do tipo
Wiener-Levinson (TWL), que é uma generalização do caso monocanal, fazendo
a substituição dos escalares por matrizes (PORSANI, 1997, PORSANI &
URSIN, 2007); e (2) a filtragem F-K (YILMAZ, 1987) que faz uso das
transformadas direta e inversa de Fourier. O primeiro tipo de técnica é baseado
na periodicidade das múltiplas (ROBINSON & TREITEL, 1980; PORSANI,
1997) enquanto o segundo tipo de técnica é baseado nas diferenças de
mergulho dos eventos. Ambas as técnicas já foram aplicadas para atenuar
14
múltiplas, a exemplo de Lima (1999), Bezerra (2001), Santos Jr. (2002) e
Maciel (2007) para os algoritmos TWL e Ryu (1982) e Gamboa (2003) para a
filtragem F-K. O foco do presente trabalho é na comparação do desempenho
dessas duas técnicas em ambiente marinho. Iremos utilizar dados sintéticos
gerados com modelos onde a complexidade da batimetria do fundo do mar e
da geologia da área imageada foi variada. A deconvolução preditiva foi aplicada
em famílias de afastamento comum e a filtragem F-K em famílias CDP.
O algoritmo tipo Wiener-Levinson aplica a recursão de Levinson
diretamente ao traço sísmico gerando e atualizando vetores de erro direto e
reverso, onde o vetor de erro direto obtido ao final da recursão constitui o traço
sísmico deconvolvido (SANTOS JR. 2002; PORSANI & URSIN 2007). Na
prática, isto significa efetuar a deconvolução preditiva sem a necessidade de
calcular os elementos do filtro ou da autocorrelação ou correlação cruzada dos
traços sísmicos. Utilizamos algoritmos desenvolvidos e disponibilizados por
pesquisadores do CPGG-UFBA.
Fazendo uso da transformada de Fourier é possível decompor o campo
de onda original no domínio t-x (tempo-distância) em suas componentes no
domínio F-K (freqüência-número de ondas), de forma em que os dados
sísmicos de entrada são transformados em uma imagem de densidade de
energia.
O manuscrito está organizado da seguinte maneira. Primeiro,
apresentamos um resumo dos fundamentos teóricos de ambos os métodos.
Em seguida, mostraremos resultados da aplicação de ambos em dados
sintéticos e, por último, em dados reais, em cada caso apresentando uma
análise comparativa de desempenho. Por fim, apresentaremos as nossas
conclusões.

15
DECONVOLUÇÃO PREDITIVA MULTICANAL
A deconvolução preditiva (DP), usando o filtro de Wiener-Levison (WL), é
um método em que um operador prediz as múltiplas, em contraste com as
chegadas primárias, e as subtrai do traço sísmico (ROBINSON et al., 1980;
PEACOCK et al., 1969). O modelo convolucional sem ruído para um
sismograma que contém as múltiplas do fundo do mar pode ser descrito pela
equação:
x t = p t ∗ e t ∗ m t 1.1
em que x t representa o traço sísmico, p t é o pulso sísmico temporalmente
invariante, e t é a representação da resposta impulsiva da terra, contendo
primárias e múltiplas internas, e por fim, m t representa o trem de onda das
reverberações do fundo do mar (YILMAZ, 1987).
O filtro de WL prediz eventos periódicos, como múltiplas no sismograma,
gerando dessa forma a possibilidade de remoção das mesmas. Para aplicar o
filtro é necessário estabelecer previamente uma distância de predição L que é
medida em termos de número de amostras. No caso particular em que L = 1, a
operação de deconvolução do pulso fornece como traço resultante x͂(t)
formado por e t convolvido com m t , como visto na equação abaixo:
x t = e t ∗ m t 1.2
Dessa forma x t corresponde a um traço com maior resolução temporal, pois o
pulso p t foi comprimido a uma função delta de Dirac. Contudo, quando L>1 o
operador preditivo de erro atuará em amostras localizadas em tempo maiores.
L deve ser adequadamente escolhido de modo que o filtro venha a atuar na
zona em que ocorrem as múltiplas. Desse modo, o traço resultante ideal
y t representa a série refletividade convolvida apenas com o pulso sísmico

16
(ROBINSON et al., 1980):
y t = p t ∗ e t 1.3
Portanto, quanto mais precisa for a definição da distância de predição melhor
será o desempenho do método.
A teoria da filtragem preditiva multicanal pode ser obtida generalizando o
caso monocanal fazendo a substituição dos escalares por matrizes (PORSANI,
1997). Como exemplo, vamos ilustrar uma situação em que cada traço
deconvolvido é obtido com uma janela de três traços. Admita que 𝑥(𝑡), 𝑦(𝑡) e
𝑧(𝑡) são os traços de entrada, 𝜔 𝑡 desejado e 𝜔 𝑡 o dado calculado. Desse
modo, temos:
ω t = f t ∗ x t + g t ∗ y t + h t ∗ z t 1.4
𝑓 𝑡 , 𝑔 𝑡 e 𝑡 são operadores que atuam sobre os respectivos traços 𝑥(𝑡),
𝑦(𝑡) e 𝑧(𝑡). Para filtros de três coeficientes ao longo do traço, a equação 1.4 é
dada por:
ω t = xt−k+1f k +
3
k=1
yt−k+1g k +
3
k=1
zt−k+1h k 1.5
3
k=1
Assim, a expressão do erro de predição pode ser escrita conforme a equação
abaixo:
e t = ω t − ω t 1.6
que idealmente seria nulo.
Em notação matricial a equação 1.6 é representada como a seguir:
𝑾 = 𝑿 𝒀 𝒁 1.7
Onde 𝑾 é uma matriz toeplitz construída pela matriz também toeplitz, 𝑿, 𝒀 e 𝒁
geradas respectivamente pelos traços 𝑥(𝑡), 𝑦(𝑡) e 𝑧(𝑡). Desse modo podemos
definir

17
𝑎𝑇 = 𝑓𝑇 𝑔𝑇 𝑇 1.8
Onde os vetores 𝑓, 𝑔 e são formados respectivamente pelos operadores
𝑓𝑡 , 𝑔𝑡 𝑒 𝑡 .
Para um vetor 𝒂 arbitrário podemos escrever o vetor de erro de predição na
forma
𝑒 = 𝑥 −𝑾𝒂 1.9
Minimizando a forma quadrática
𝑄 𝒂 = 𝒆𝑇𝒆 1.10
Obtêm-se as equações normais, cuja solução fornece o filtro preditivo
multicanal de WL (Lima, 1999; Santos Júnior, 2012; Maciel et al. 2003)
Fazendo a saída desejada 𝜔 𝑡 corresponder a um dos canais de entrada,
avançado de 𝐿 amostras, 𝜔𝑡 = 𝑥𝑡+𝐿. A solução do sistema de equações
fornecerá os coeficientes do operador preditivo multicanal, com distância de
predição 𝐿.
A aplicação prática do filtro (PORSANI, 1997) requer a definição do período 𝑃
(em número de amostras), a partir do qual a distância de predição 𝐿 é
estimada. Usualmente, 𝐿 é tomado como um percentual de P, da ordem de
90%. O número de coeficientes do filtro 𝑁 também é usualmente definido como
sendo um percentual de 𝑃, da ordem de 20%.
FILTRAGEM F-K
A transformada F-K é uma transformada dupla de Fourier que atua nos
domínios de tempo e distância (YILMAZ, 1987), isto é, no domínio t-x. A
filtragem F-K possibilita suprimir os eventos que ocorrem segundo um intervalo
de mergulho especificado pelo intérprete. Idealmente, todos os eventos com

18
mergulhos fora desse intervalo são preservados, sem alteração na sua banda
de frequência. Em famílias CDP, corrigidas de NMO, as múltiplas apresentam
mergulho diferente dos eventos primários, desde que a velocidade no meio
geológico seja superior à velocidade na água, o que geralmente acontece. No
domínio transformado f-k (frequência-número de onda), os eventos primários e
múltiplos são separados, possibilitando o mapeamento de setores
dominantemente ocupados pelas múltiplas. O filtro F-K é desenhado de modo a
atuar sobre esse setor. Após a aplicação do filtro F-K, os próximos passos
consistem em transformar o dado para o domínio original e remover a correção
NMO.
APLICAÇÃO EM DADOS SINTÉTICOS
Em todos os casos sintéticos, a aquisição foi simulada de acordo com a
parametrização mostrada na Tabela 1. Os modelos utilizados estão mostrados
na Fig. 1 (a-d). Estes modelos apresentam diferentes combinações de
batimetria e geologia. Na Fig. 1a é mostrado o modelo SS que representa a
ocorrência de uma batimetria de geometria simples com uma geologia também
simples. Por sua vez, na Fig. 1b é mostrado o modelo SC que representa a
ocorrência de uma batimetria de geometria simples com uma geologia
complexa. Os demais modelos, CS e CC, seguem a mesma lógica de
construção. Em todos os modelos, foram atribuídos os seguintes valores de
velocidade de propagação da onda P: 1500 m/s no mar e 2000 m/s, 2800 m/s e
4100 m/s nas camadas subjacentes (Fig. 1).
Tabela 1 entra aqui.
Fig. 1 entra aqui.
No caso do modelo CS, a espessura da terceira camada (de velocidade
19
igual a 2800m/s) foi escolhida de forma que o tempo de chegada da múltipla de
primeira ordem do fundo do mar seja aproximadamente coincidente com a
reflexão primária da terceira interface, como mostra a Fig. 2c. Dessa maneira,
poderemos avaliar a atuação das duas técnicas nos caso de sobreposição dos
eventos.
Para gerar os dados sísmicos sintéticos, utilizou-se o software livre
Seismic Unix (SU) (COHEN et al., 2008) que é executado no sistema Linux. O
SU é composto por um conjunto de sub-rotinas desenvolvidas pelo Center of
Wave Phenomena (CWP) da Colorado School of Mines. A modelagem não
incluiu os efeitos de atenuação e de espalhamento geométrico. Na Fig. 2
apresentamos as famílias do tiro comum de número 168 para cada modelo.
Para melhor simular um dado real, acrescentou-se aos dados sintéticos ruído
pseudo-aleatório, aditivo, uniforme, de média nula, mas ainda fornecendo uma
razão sinal/ruído muito alta.
Fig. 2 entra aqui.
Deconvolução preditiva multicanal - DPM
A periodicidade nas múltiplas é melhor preservada no domínio de
afastamento-comum corrigido de NMO com a velocidade das múltiplas. Este foi
o domínio escolhido para aplicação da técnica DPM.
O procedimento que usamos para escolher a distância de predição é a
seguir descrito. Os dados foram organizados em CMP e corrigidos de NMO
com velocidade igual a 1500 m/s (velocidade da água). Em seguida, o dado foi
organizado em famílias de afastamento comum (AC) (180 painéis), e dividido
em quatro conjuntos de seções de AC, lateralmente justapostas, para estimar

20
de maneira mais precisa o período P de cada traço. Cada período foi então
amostrado no respectivo painel de AC mínimo de cada subconjunto tomando
como referência a primária do fundo do mar, que é facilmente identificada. Por
fim, adotamos as escolhas L=0.98P e N=0.06P para cada traço. A DPM foi
então aplicada em cada conjunto de AC, utilizando cinco canais. Após a
deconvolução, os conjuntos de AC foram concatenados, sendo a seguir
removida a correção NMO com a velocidade da água. Uma vez o dado
restaurado, é então realizada uma análise de velocidade para nova correção
NMO, desta vez com velocidade RMS, de modo a obter finalmente a seção de
afastamento nulo através do empilhamento do dado. De modo a ilustrar a
aplicação da técnica DPM, a Fig. 3 apresenta o painel de AC mínimo antes e
depois da aplicação da técnica.
Fig. 3 entra aqui.
Filtragem F-K.
A filtragem F-K foi aplicada ao dado organizado em famílias de CDP,
corrigido de NMO usando velocidades intermediárias entre primárias e
múltiplas. Com esta escolha de velocidades, as primárias ficarão
sobrecorrigidas e, as múltiplas, subcorrigida. Essa estratégia permite que os
eventos assumam diferentes mergulhos, de modo que no domínio F-K eles
serão mapeados em setores diferentes do espectro de frequência (como ilustra
a Fig. 4), facilitando assim a supressão das múltiplas. De modo a ilustrar a
aplicação da técnica da filtragem F-K, a Fig. 5 apresenta o painel de CDP 1386
do modelo CC antes e depois da aplicação da filtragem.
21
Fig. 4 entra aqui.
Fig. 5 entra aqui.
Na Fig. 4 podemos observar que os eventos primários estão localizados
no quadrante positivo e os eventos múltiplos estão situados no quadrante
negativo. O filtro F-K foi então foi aplicado para remover os eventos mapeados
no quadrante negativo como mostrado na Fig.4b.
Discussão conjunta dos resultados.
Os resultados da aplicação das técnicas DPM e filtragem F-K para os
modelos SS, SC, CS e CC estão apresentados, na forma de seções
empilhadas, nas Figs. 6, 7, 8 e 9, respectivamente. Para efeito de comparação,
cada Figura apresenta, da esquerda para a direita, o dado original (a), o dado
após a aplicação da DPM (b) e o dado após a filtragem F-K (c). Em todas as
Figuras, as setas indicam a localização e a ordem de cada evento múltiplo.
Fig. 6 entra aqui.
Fig. 7 entra aqui.
Fig. 8 entra aqui.
Fig. 9 entra aqui.
Para o modelo SS, é possível identificar que a DPM, assim como a
filtragem F-K, atuou de forma efetiva nos eventos que se desejava atenuar. O
bom desempenho de ambas as técnicas se deve ao fato de que não há
complexidade que dificulte tanto a identificação do período das primárias, como
a identificação das velocidades intermediárias. Como consequência, tanto a
predição da periodicidade como a escolha de uma velocidade intermediária são
tarefas simples nesse modelo.

22
De modo semelhante ao ocorrido no modelo SS, ambas as técnicas
apresentaram atuação bastante eficiente quando aplicadas ao modelo SC, pois
o fundo do mar é inclinado e sem nenhuma outra complexidade (Fig. 7).
Contudo, para o modelo CS, que apresenta uma geometria de fundo de mar
bastante complexa (Fig. 1c), a identificação do período das primárias e das
velocidades intermediárias é mais difícil, o que impacta o desempenho de
ambas as técnicas. Observe ainda que este modelo apresenta a dificuldade
adicional da superposição da múltipla de primeira ordem com a reflexão
primária da terceira interface (Fig. 2c). Desse modo, reforcemos que o evento,
mostrado nas Figs. 8b e c, aproximadamente coincidentes com a marca da
múltipla de primeira ordem está associado com a primária da terceira interface.
Com este fato em mente, observe que os resultados da filtragem F-K atenuam
menos esta primária. Ou seja, a DPM apresenta a deficiência de que em
trechos em que há sobreposição nos tempos de chegada de reflexões
primárias e múltiplas, ocorre atenuação das reflexões primárias juntamente
com os eventos múltiplos. Este fato pode ser melhor apreciado no resultado já
apresentado da Fig. 3b. Esse problema pode ser amenizado dividindo-se o
dado em conjuntos de seções de AC, o que permite estimar com maior
precisão o período das múltiplas, estratégia esta que já foi adotada nos
resultados aqui apresentados. É assim importante ressaltar que a DPM não
tem boa atuação em trechos em que há sobreposição de tempos de chegadas
de múltiplas com eventos primários.
Os resultados para o modelo CC (Fig. 9) são semelhantes aos do
modelo CS. Novamente a técnica da filtragem F-K apresentou melhor
desempenho nos trechos em que ocorre sobreposição de tempos de chegadas
de múltiplas com eventos primários. Um outro fator que contribui para que a

23
efetividade do filtro F-K seja maior que a da DPM é o fato de que a atuação da
DPM está restrita ao tamanho do filtro, enquanto a filtragem F-K atua em todo o
dado, uma vez definida a sua faixa de atuação.
APLICAÇÃO EM DADO REAL.
Da mesma forma que nos dados sintéticos, o dado real foi processado
utilizando as rotinas do SU. O dado utilizado foi levantando no Golfo do México.
Trata-se de uma linha sísmica 2D, adquirida através do arranjo “end-on”, com
cerca de 40 km de extensão. Os parâmetros de aquisição estão mostrados na
Tabela 2.
Tabela 2 entra aqui
O processamento do dado em cada técnica constou de três fases. A
primeira fase, comum às técnicas DPM e F-K, constou dos seguintes passos:
(P1) Pré-processamento (edição e mute), (P2) Correção de divergência
esférica, (P3) filtragem passa-banda (trapezoidal, 5, 7, 75, 80 Hz), e (P4)
deconvolução ao impulso. O processamento da segunda fase foi específico de
cada técnica. Para a DPM, a segunda fase constou dos passos: (S1) análise de
velocidade (velocidade das múltiplas), (S2) correção de NMO, (S3) organização
em famílias de afastamento comum, (S4) a DPM em si, e (S5) organização em
famílias CDP. Por sua vez, a segunda fase para a filtragem F-K foi composta
pelos passos: (S1) análise de velocidade (velocidade intermediária), (S2)
correção de NMO, e (S3) filtragem F-K em si. Por fim, a terceira fase de
processamento foi novamente a mesma para ambas as técnicas e constou dos
passos: (T1) correção de NMO inversa, (T2) análise de velocidade, (T3)
correção de NMO, seguida de mute para remoção de estiramento, e (T4)

24
empilhamento.
Na técnica DPM, devido à necessidade de se obter o período em
número de amostras, o dado (já em AC) foi divido em três conjuntos, sendo o
período coletado em cada painel de AC mínimo de cada conjunto de dados. Foi
feita a escolha L=0,98P e N=0,6P de modo a restringir a ação do filtro ao trecho
e tamanho do pulso. A Fig. 10 apresenta um painel de coerência onde se
mostra a escolha da função velocidade associada às regiões de maior
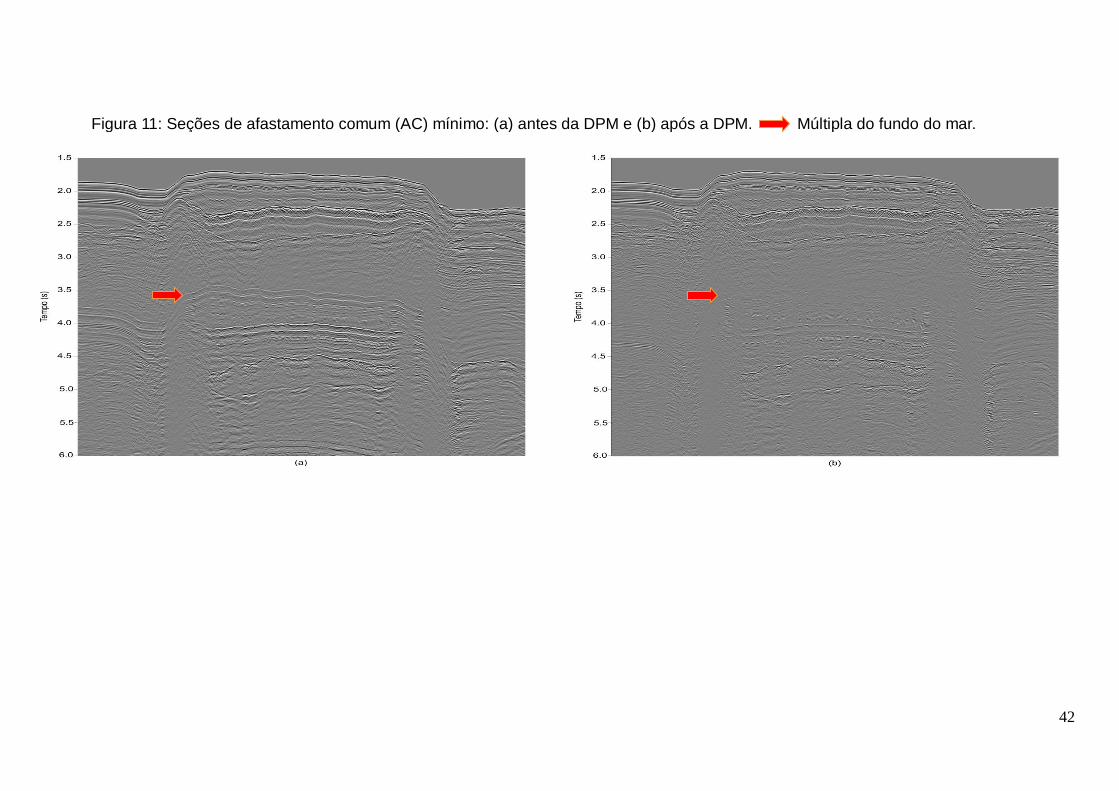
concentração de energia. De modo a ilustrar a efetividade da técnica DPM, a
Fig. 11 apresenta a seção de AC mínimo antes e após a aplicação da DPM.
Fig. 10 entra aqui.
Fig. 11 entra aqui.
Para a técnica da filtragem F-K, a escolha das velocidades
intermediarias está ilustrada na Fig. 12. Por sua vez, o mapeamento do setor
de atuação do filtro F-K e a efetividade do processo de filtragem estão
exemplificados nas Figs. 13 e 14.
Fig. 12 entra aqui.
Fig. 13 entra aqui.
Fig. 14 entra aqui.
A Fig. 15 apresenta a seção empilhada na forma original (a), após a
DPM (b) e após a aplicação da filtragem F-K (c). A DPM foi mais eficiente em
regiões específicas do dado. Como exemplo, observe que a primeira múltipla
do fundo do mar foi mais eficientemente atenuada pela técnica DPM que pela
25
técnica da filtragem F-K (compare as Figs. 15b e c, no trecho marcado pela
seta vermelha). Por outro lado, a técnica de filtragem F-K teve uma melhor
atuação na seção como um todo, o que é resultado do fato já apontado que
esta técnica suprime todos os eventos no setor do espectro filtrado. Como
consequência, observe que múltiplas (provavelmente internas) em torno do
tempo 4,5 s foram melhor atenuadas através da filtragem F-K.
Fig. 15 entra aqui.
Fizemos uma tentativa de combinar as duas técnicas de modo a
aproveitar os benefícios de ambas as técnicas. Nesse sentido, a Fig. 16
apresenta a seção empilhada resultante do processamento da técnica DPM
seguida pela técnica da filtragem F-K. As múltiplas (mesmo as internas) foram
mais eficientemente atenuadas.
CONCLUSÔES
A eficiência da técnica DPM é bastante sensível à identificação correta
do período e do tamanho do filtro. Por sua vez, a filtragem F-K é bastante
sensível à escolha da velocidade adequada para separar as múltiplas dos
eventos primários. A DPM é uma técnica que é focada num dado evento; nesse
sentido, quando bem parametrizada, ela é mais eficiente para remover a
múltipla especificada, podendo ter atuação menos eficiente em outras
múltiplas. A DPM pode ser otimizada aplicando-se a técnica várias vezes, em
cada vez com uma diferente parametrização. Por sua vez, a filtragem F-K tem
aproximadamente o mesmo desempenho em todas as múltiplas que estejam
localizadas em um mesmo setor do espectro F-K. Uma deficiência da técnica
26
DPM é quando há sobreposição de múltiplas com eventos primários.
As duas técnicas podem ser combinadas de modo a tomar partido do
potencial de cada uma delas, aplicando primeiro a técnica DPM focada na
múltipla do fundo do mar, seguida da aplicação da filtragem F-K para a
atenuação das demais múltiplas.
AGRADECIMENTOS
Os autores agradecem à PETROBRAS, FINEP, CNPq e INCT-GP pelo
financiamento. Aos pesquisadores do LAGEP-CPGG-UFBA por
disponibilizarem os algoritmos usados na DPM.

27
BIBLIOGRAFIA
COHEN, J.K.; STOCKWELL, J.W.J.The New SU User’s Manual, Colorado
School of Mines.2008.
BEZERRA, a. c. (2001) Deconvolução preditiva multicanal utilizando
interpolação de traços sísmicos e transformada 𝜏 − 𝑃. Dissert. De
Mestrado, Universidade Federal da Bahia, Salvador, Brasil.
GAMBOA, F. Caracterização e Eliminação de Múltiplas pelo Método de
Superfície Comum de Reflexão (CRS). 2003. 117 f. Dissertação de
Mestrado em Geofísica, Universidade Federal da Bahia, Salvador, 2003.
LIMA, A. P., 1999. Deconvolução de Reflexões múltiplas nos domínios 𝜏 − 𝑋 e
𝜏 − 𝑃 com filtros multicanais. Dissertação de Mestrado, Programa de Pós-
Graduação em Geofísica, Universidade Federal da Bahia.
MACIEL, R. C., 2007. Deconvolução Preditiva multicanal de reflexões múltiplas
no domínio CRS. Tese de Doutorado, Programa de Pós-Graduação em
Geofísica, Universidade Federal da Bahia.
PEACOCK, K. L. & TREITEL, S. 1969. Predictive deconvolution: Theory and
pratice. Geophysics, 34: 155-169.
PORSANI, M. J., 1997. Deconvolução de múltiplas com filtros Wiener-Levinson
multicanais, In: Expanded Abstract, 5th International Congress of the
Brazilian Geophysical Society., vol. 1, pp. 196-199, SBGF.
PORSANI, M. J. e URSIN, B. (2007) Direct multichannel predictive
deconvlolution, Geophysics, 72:H11.
ROBINSON, E. A. & TREITEL, S., 1980. Principles of digital Wiener
filtering.Geophysical Prospecting, 15 (3): 311-333.

28
ROBINSON, E. A. & TREITEL, S., 1980. Geophysical signal analysis, Prentice-
Hall, Eglewood Cliffs.
RYU, J. V., 1982, Decomposition (DECOM) approach applied to wave-field
analysis with seismic reflection records: Gephysics, 47 869-883.
SANTOS JÚNIOR, A. (2002) Deconvolução multicanal utilizando um algoritmo
tipo Wiener-Levinson, Dissert. De Mestrado, Universidade Federal da
Bahia, Salvador, Brasil.
SENTI, R. J. (1988)-Special Report: Geophysical Activity in 1987. Geophysics:
The Leading Edge of Exploartion. Vol. 7, No 8.
VERSCHUUR, D. J., 2006. Seismic multiple removal techniques – past, present
and future. Education Tour Series, EAGE, Houten, The Netherlands.
YILMAZ, Ö. 1987 Seismic Data Processing, SEG, Tulsa, Oklahoma.

29
LISTA DE TABELAS
TABELA 1: Parâmetros de aquisição do dado sintético.
TABELA 2: Parâmetros de aquisição do conjunto de dados marinhos do Golfo
do México.
LISTA DE FIGURAS
FIGURA 1: Modelos sintéticos: (a) SS – fundo do mar com geometria simples e
geologia com geometria também simples, (b) SC – fundo do mar com
geometria simples e geologia com geometria complexa, (c) CS – fundo do mar
com geometria complexa e geologia com geometria simples e (d) CC – fundo
do mar com geometria complexa e geologia com geometria também complexa.
FIGURA 2: Família de tiro comum 168 – para cada modelo: (a) fundo do mar
com geometria simples e geologia com geometria também simples, (b) fundo
do mar com geometria simples e geologia com geometria complexa, (c) fundo
do mar complexo com geologia complexa e (d) fundo do mar com geometria
complexa e geologia com geometria também complexa.
FIGURA 3: Painel de afastamento comum (AC), modelo fundo do mar com
geometria complexa e geologia com geometria também complexa (CC): (a)
original e (b) após a aplicação da DPM.
FIGURA 4: Painéis de espectro F-K: (a) antes da filtragem F-K, (b) após a
filtragem F-K, e (c) após a filtragem F-K e remoção da correção de NMO.
FIGURA 5: Painel em CDP do modelo fundo do mar com geometria complexa e
geologia com geometria também complexa (CC): (a) original e (b) após a
aplicação da filtragem F-K.
FIGURA 6: Seção empilhada, modelo fundo do mar com geometria simples e
geologia com geometria também simples (SS): (a) original, (b) após a DPM e

30
(c) após a filtragem F-K.
FIGURA 7: Seção empilhada, modelo fundo do mar com geometria simples e
geologia com geometria complexa (SC): (a) original, (b) após a DPM e (c) após
a filtragem F-K.
FIGURA 8: Seção empilhada, modelo fundo do mar com geometria complexa e
geologia com geometria simples (CS): (a) original, (b) após a DPM e (c) após a
filtragem F-K.
FIGURA 9: Seção empilhada, modelo fundo do mar com geometria complexa e
geologia com geometria também complexa (CC): (a) original, (b) após a DPM e
(c) após a filtragem F-K.
FIGURA 10: painel utilizado para obtenção do campo de velocidades.
FIGURA 11: Seções de afastamento comum (AC) mínimo: (a) antes da DPM e
(b) após a DPM.
FIGURA 12: Painel demonstrando a obtenção das velocidades RMS
intermediárias do CDP 1640.
FIGURA 13: Painéis de espectro de frequência: (a) antes da filtragem F-K (b)
espectro F-K, espectro mais forte do lado direito correspondente às reflexões
primárias e o esquerdo zerado para eliminar as múltiplas e (b) filtrado após
correção de NMO inverso.
FIGURA 14: Painel de CDP: (a) original e (b) após a filtragem F-K com campo
de velocidade intermediária.
FIGURA 15: Seção empilhada: (a) original, (b) após a DPM e (c) após a
filtragem F-K.
FIGURA 16: Seção empilhada com ambas as filtragens DPM e FK.

31
Tabela 1: Parâmetros de aquisição do dado sintético.
DESCRIÇÃO DOS PARÂMETROS PARÂMETROS UTILIZADOS
Intervalo entre as estações (m) 26
Intervalo entre os receptores (m) 26
Intervalo entre fonte e receptor (m) 52
Intervalo de CMP (m) 13
Número de tiros 500
Número de canais 180
Intervalo de amostragem (ms) 4
Número de amostras 2001
Tempo de registro (s) 8
Afastamento mínimo (m) 52
Afastamento máximo (m) 4706
Tabela 2: Parâmetros de aquisição do conjunto de dados marinhos do Golfo do México.
DESCRIÇÃO DOS PARÂMETROS PARÂMETROS UTILIZADOS
Intervalo entre as estações (pés) 87,5
Intervalo entre os receptores (pés) 87,5
Intervalo entre fonte e receptor (pés) 87,5
Intervalo de CMP 13,33
Número de tiros 1001
Número de canais 180
Intervalo de amostragem (m/s) 4
Número de amostras 1501
Tempo de registro (s) 4
Afastamento mínimo -330
Afastamento máximo -15993

32
(a) (b)
(c) (d)
Figura 1: Modelos sintéticos: (a) SS – fundo do mar com geometria simples e geologia com geometria também simples, (b) SC – fundo do mar com geometria simples e geologia com geometria complexa, (c) CS – fundo do mar com geometria complexa e geologia com geometria simples e (d) CC – fundo do mar com geometria complexa e geologia com geometria também complexa.

33
Figura 2: Família de tiro comum 168 – para cada modelo: (a) fundo do mar com geometria simples e geologia com geometria também simples, (b) fundo do mar com geometria simples e geologia com geometria complexa, (c) fundo do mar complexo com geologia simples e (d) fundo do mar com geometria complexa e geologia com geometria também complexa.

34
Figura 3: Painel de afastamento comum (AC), modelo fundo do mar com geometria complexa e geologia com geometria também complexa (CC): (a) original e (b) após a aplicação da DPM. Múltiplas de Primeira ordem. Múltiplas de segunda ordem. Múltiplas de terceira ordem.

35
Figura 4: Painéis de espectro F-K: (a) antes da filtragem F-K, (b) após a filtragem F-K, e (c) após a filtragem F-K e remoção
da correção de NMO.
(a) (b) (c)

36
Figura 5: Painel em CDP do modelo fundo do mar com geometria complexa e geologia com geometria também complexa (CC):
(a) original e (b) após a aplicação da filtragem F-K.

37
Figura 6: Seção empilhada, modelo fundo do mar com geometria simples e geologia com geometria também simples (SS): (a) original, (b) após a DPM e (c) após a filtragem F-K. Múltiplas de Primeira ordem. Múltiplas de segunda ordem. Múltiplas de terceira ordem.

38
Figura 7: Seção empilhada, modelo fundo do mar com geometria simples e geologia com geometria complexa (SC): (a) original, (b) após a DPM e (c) após a filtragem F-K. Múltiplas de Primeira ordem. Múltiplas de segunda ordem. Múltiplas de terceira ordem.

39
Figura 8: Seção empilhada, modelo fundo do mar com geometria complexa e geologia com geometria simples (CS): (a) original, (b) após a DPM e (c) após a filtragem F-K. Múltiplas de Primeira ordem. Múltiplas de segunda ordem. Múltiplas de terceira ordem.

40
(a) (b) (c)
Figura 9: Seção empilhada, modelo fundo do mar com geometria complexa e geologia com geometria também complexa (CC): (a) original, (b) após a DPM e (c) após a filtragem F-K. Múltiplas de Primeira ordem. Múltiplas de segunda ordem. Múltiplas de terceira ordem.

41
Figura 10: Painel utilizado para obtenção do campo de velocidades.
42
Figura 11: Seções de afastamento comum (AC) mínimo: (a) antes da DPM e (b) após a DPM. Múltipla do fundo do mar.

43
Figura 12: Painel demonstrando a obtenção das velocidades RMS
intermediárias do CDP 1640.

44
Figura 13: Painéis de espectro F-K: (a) antes da filtragem F-K, (b) após a filtragem F-K, e (c) após a filtragem F-K e remoção da correção de
NMO.
(a) (b) (c)

45
Figura 14: Painel de CDP: (a) original e (b) após a filtragem F-K com campo de velocidade intermediária.

46
Figura 15: Seção empilhada: (a) original, (b) após a DPM e (c) após a filtragem F-K. Múltipla do fundo do mar.

47
Figura 16: Seção empilhada com ambas as filtragens DPM e FK. Múltipla do fundo do mar.

NOTA SOBRE OS AUTORES
Marcos Augusto lima da Luz. L. P. em Matemática pela Universidade Federal do Pará UFPA
2005, mestrando em Geofísica no Programa de Pós-graduação em Geodinâmica e Geofísica
PPGG da Universidade Federal do Rio Grande do Norte.
Rosangela Corrêa Maciel. B. C. em Engenharia Civil pela Universidade Federal do Pará, 1997. Mestre
em Geofísica pela Universidade Federal do Pará, 2002. Doutora em Geofísica pela
Universidade Federal da Bahia, 2007. Atualmente é docente do departamento de Geofísica da
Universidade Federal do Rio Grande do Norte. Tem experiência na área de Geociências, com ênfase e
Geofísica Aplicada, atuando principalmente nos seguintes temas: processamento sísmico, supressão de
múltiplas, deconvolução multicanal, empilhamento CRS e métodos de filtragem.
Walter Eugenio de Medeiros: Engenheiro civil (UFRN, 1981), Mestre (UFBA, 1987) e Doutor
em Geofísica (UFPA, 1993). Professor Titular do Departamento de Geofísica da UFRN, atuando
em geofísica aplicada em articulação com a pós-graduação em Geodinâmica e Geofísica da
UFRN, onde orientou 10 trabalhos de mestrado e 06 de doutorado. Em parceria com vários
pesquisadores, publicou 32 artigos em revistas nacionais e internacionais e 01 livro texto. É
pesquisador 1A do CNPq, membro do conselho editorial da Revista Brasileira de Geofísica e
consultor da CAPES para a área de Geociências. Foi o primeiro coordenador da graduação em
Geofísica da UFRN.

49
REFERÊNCIAS BIBLIOGRÁFICAS
COHEN, J.K.; STOCKWELL, J.W.J.The New SU User’s Manual, Colorado School of
Mines.2008.
BEZERRA, a. c. (2001) Deconvolução preditiva multicanal utilizando interpolação de
traços sísmicos e transformada 𝜏 − 𝑃. Dissert. De Mestrado, Universidade Federal
da Bahia, Salvador, Brasil.
DRAGOSET, B. Introduction to air guns and air-gun arrays. Disponível em:
<http://www.seismologypetroleum.com.>. Acesso em: 03 janeiro 2012.
GAMBOA, F. Caracterização e Eliminação de Múltiplas pelo Método de Superfície
Comum de Reflexão (CRS). 2003. 117 f. Dissertação de Mestrado em Geofísica,
Universidade Federal da Bahia, Salvador, 2003.
KAY, S. M. G., HARTLEY, B. M. AND MARPLE, JR. S. L. 1981. Spectrum analysis – A
modern perspective, IEEE 69, 11.
LIMA, A. P., 1999. Deconvolução de Reflexões múltiplas nos domínios 𝜏 − 𝑋 e 𝜏 − 𝑃
com filtros multicanais. Dissertação de Mestrado, Programa de Pós-Graduação
em Geofísica, Universidade Federal da Bahia.
LEVINSON, N. 1947. The Wiener RMS ( root mean square) error criteriam in filter
design and prediction. J. Math. Phys. 25, 251-278.
MACIEL, R. C., 2007. Deconvolução Preditiva multicanal de reflexões múltiplas no
domínio CRS. Tese de Doutorado, Programa de Pós-Graduação em Geofísica,
Universidade Federal da Bahia.
PEACOCK, K. L. & TREITEL, S. 1969. Predictive deconvolution: Theory and pratice.
Geophysics, 34: 155-169.
PONTES, C. E. S., 1985, Algumas Técnicas de Supressão de Reflexões Múltiplas e
Aplicação ao Alto do Macau, Bacia Potiguar, Dissertação de Mestrado, UFBA,
Salvador, Brasil.
PORSANI, M. J., 1997. Deconvolução de múltiplas com filtros Wiener-Levinson
multicanais, In: Expanded Abstract, 5th International Congress of the Brazilian
Geophysical Society., vol. 1, pp. 196-199, SBGF.
PORSANI, M. J. e Ursin, B. (2007) Direct multichannel predictive deconvlolution,
Geophysics, 72:H11.
PORSANI, M. j. and VETTER, W. J. 1984. An optimality formulation for (Levinson)

50
recursive design off L-lagged minimum-energy filters. 54 th Annual Internatinal
Meeting of SEG, Attlanta, Expanded abstract, 1, 604-606.
ROBINSON, E. A. & TREITEL, S., 1980. Principles of digital Wiener
filtering.Geophysical Prospecting, 15 (3): 311-333.
ROBINSON, E. A. & TREITEL, S., 1980. Geophysical signal analysis, Prentice-Hall,
Eglewood Cliffs.
RYU, J. V., 1982, Decomposition (DECOM) approach applied to wave-field analysis with
seismic reflection records: Gephysics, 47 869-883.
SENTI, R. J. (1988)-Special Report: Geophysical Activity in 1987. Geophysics: The
Leading Edge of Exploartion. Vol. 7, No 8.
VERSCHUUR, D. J., 2006. Seismic multiple removal techniques – past, present and
future. Education Tour Series, EAGE, Houten, The Netherlands.
WEGLEIN, A. B., Gasparoto, F. A., Carvalho, P. M., and Stolt, R. H., 1997, An inverse-
scattering series method for attenuating multiples in seismic reflection data:
Geophysics, 62, nº.06, 1974-1989.
YILMAZ, Ö. 1987 Seismic Data Processing, SEG, Tulsa, Oklahoma.

51
ANEXO A – FUNDAMENTAÇÃO MATEMÁTICA DA DECONVOLUÇÃO PREDITIVA
MONOCANAL
A.1 - Deconvolução preditiva.
A deconvolução preditiva (DP), usando o filtro de Wiener-Levison (WL), é um
método em que um operador prediz as múltiplas, em contraste com as chegadas
primárias, e as subtrai do traço sísmico (ROBINSON et al., 1980; PEACOK et al.,
1969). O modelo convolucional sem ruído para um sismograma que contém as
múltiplas do fundo do mar pode ser descrito pela equação (A. 1):
x t = p t ∗ e t ∗ m t (A. 1)
em que x t representa o traço sísmico, p t é o pulso sísmico temporalmente
invariante, e t é a representação da resposta impulsiva da terra, contendo primárias e
múltiplas, e por fim, m t representa o trem de onda das reverberações do fundo do
mar (YILMAZ, 1987).
O filtro de WL prediz eventos periódicos, como múltiplas no sismograma, gerando
dessa forma a possibilidade de remoção das mesmas. Para aplicar o filtro é necessário
estabelecer previamente uma distancia de predição L que é medida em termos de
número de amostras. No caso particular em que L = 1, a operação de deconvolução do
pulso fornece como traço resultante x (t) formado por e t convolvido com m t , como
visto na equação (A. 2) abaixo:
x t = e t ∗ m t (A. 2)
Dessa forma x (t) corresponde a um traço com maior resolução temporal, pois o
pulso p t foi comprimido a uma função delta de Dirac. Contudo, quando L>1 o
operador preditivo de erro atuará em amostras localizadas em tempo maiores. L deve
ser adequadamente escolhido de modo que o filtro venha a atuar na zona em que
ocorrem as múltiplas. Desse modo, o traço resultante ideal y t representa a série
refletividade convolvida apenas com o pulso sísmico (ROBINSON et al., 1980):

52
y t = p t ∗ e t (A. 3)
Portanto, quanto mais precisa for a definição da distância de predição melhor será o
desempenho do método.
A.2 - Deconvolução preditiva monocanal.
Estudos realizados por Kay et al., (1981), confirmam que a predição linear de um
sinal discreto 𝑥𝑡 pode ser representada matematicamente pela expressão (A. 4):
x 𝑡+𝐿 = 𝑥𝑡−𝑘+1h 𝑘
𝑛
𝑘=1
(A. 4)
Onde �͂�𝑡+𝐿 representa a amostra preditiva ao tempo 𝑡 + 𝐿 oriundo de uma
combinação linear das amostras 𝑥𝑡 ,… , 𝑥𝑡−𝑛+1 situadas a tempos passados. O escalar 𝐿
define a distância de predição e h 𝑡 é o filtro de predição.
O erro de predição da amostra em relação ao tempo 𝑡 + 𝐿 é dado por:
𝜀𝑡+𝐿 = 𝑥𝑡+𝐿 − �͂�𝑡+𝐿 (A. 5)
onde 𝜀𝑡 é uma série que representa a parte não predita de 𝑥𝑡 .
Sendo assim, a equação também pode ser escrita na forma:
𝜀𝑡+𝐿 = 𝑥𝑡+𝐿 − 𝑥𝑡−𝑘+1 𝑘
𝑛
𝑘=1
(A. 6)
Onde 𝑒𝑗 = 𝑥𝑗 , 𝑗 = 0, 1, 2, mostra que o filtro preditivo de erro com distância de predição
𝐿 não interfere na amostragem das reflexões primárias.
Minimizando a forma quadrática,
𝐼 = 𝜀𝑡2
𝑡
(A. 7)

53
em relação aos coeficientes do filtro de predição 1, 𝑗 = 1,… ,𝑛, se obtém um conjunto
de equações normais.
𝑟0 𝑟1 … 𝑟𝑛−1
𝑟1 𝑟0 ⋱ ⋮⋮ ⋱ ⋱ 𝑟1
𝑟𝑛−1 ⋯ 𝑟1 𝑟0
−h 1
−h 2
⋮−h 𝑛
=
𝑟𝐿𝑟𝐿+1
⋮𝑟𝐿+𝑛−1
(A. 8)
Logo, 𝑟𝜏 = 𝑥𝑡𝑥𝑡−𝜏 , 𝜏 = 0,… ,𝐿 + 𝑛 − 1𝑡 indica os coeficientes da autocorrelação do
sinal 𝑥𝑡 .
O filtro h 1,… , h 𝑛 possibilita obter uma estimativa do sinal em tempos avançados de
𝐿 amostras. Onde a solução do sistema pode ser obtida através da recursão de
Levinson, detalhada a seguir.
A.3 - Recursão de Levinson para o filtro monocanal.
Calculando a soma total dos erros quadrados minimizados resolvendo as
equações da seção anterior, temos:
min 𝐼 = 𝑟0 − 𝑟𝐿+𝑘͂𝑘 (
𝑛
𝑘=1
A. 9)
Agrupando as equações (A. 8) e (A. 9) se obtém a forma ampliada das EN’s
representadas a baixo:
𝑟0 𝑟𝐿 𝑟𝐿+1 ⋯ 𝑟𝐿+𝑛−1
𝑟𝐿 𝑟0 𝑟1 ⋯ 𝑟𝑛−1
𝑟𝐿+1 𝑟1 𝑟0 ⋱ ⋮⋮ ⋮ ⋱ ⋱ 𝑟1
𝑟𝐿+𝑛−1 𝑟𝑛−1 ⋯ 𝑟1 𝑟0
11
⋮⋮n
=
𝐸𝑛0⋮⋮0
(A. 10)
Onde 𝐸𝑛 é o erro dos mínimos quadrados e, para facilitar a notação afirmou-se
que − 𝑗 = 𝑗 , 𝑗 = 1,… ,𝑛.
54
A recursão de Levinson (LEVINSON, 1947) resolve o sistema de equação (A. 10)
aumentando de forma unitária o número de coeficientes do filtro preditivo. Esse método
inicia-se com a obtenção de duas soluções independentes de ordem 1, vejamos:
𝑟𝐿 𝑟0 𝑟1 1 011 𝑔11
0 1
= 0 0 (A. 11)
Dessa forma, se pode obter;
11 =𝑟𝐿𝑟0
𝑒
𝑔11 =𝑟1𝑟0
Sendo assim, a combinação linear da solução de ordem 1 representa o
relacionamento de Levinson para obtenção da solução de ordem 2;
111
0
+ 𝐿2 0𝑔11
1
= 121
22
(A. 12)
Pré-multiplicando ambos os lados da equação (A. 12) pela matriz,
𝑟0 𝑟𝐿 𝑟𝐿+1
𝑟𝐿 𝑟0 𝑟1𝑟𝐿+1 𝑟1 𝑟0
(A. 13)
e igualando o resultado a 𝐸𝑛 0 0 𝑇 se obtém,
𝑟0 𝑟𝐿 𝑟𝐿+1
𝑟𝐿 𝑟0 𝑟1𝑟𝐿+1 𝑟1 𝑟0
111
0
+ 𝐿2 0𝑔11
1
= 𝐸2
00
(A. 14)

55
Considerando que 1 11 0 𝑇 e 0 𝑔11 1 𝑇 satisfazem a equação (A. 11) temos,
𝑟0 𝑟𝐿
111
𝑟𝐿 𝑟𝐿+1 𝑔11
1
𝑟𝐿+1 𝑟1 111
𝑟1 𝑟0 𝑔11
1
1𝐿2 =
𝐸2
0 (A. 15)
fazendo sua demonstração de forma mais compacta obtemos,
𝐸2
∆ 1
Δ1𝐸𝑔1
122
= 𝐸2
0 . (A. 16)
Levando em consideração a simetria da matriz representada em (A. 5) se pode
demonstrar que Δ1= ∆ 1
(PORSANI E VETTER, 1984).
De posse da equação (A. 16) é possível obter a expressão para calcular 𝐿2,
𝐿2 = − 𝑟𝐿 𝑟𝐿+1
𝑔11
1
𝑟1 𝑟0 𝑔11
1
=∆ 1
𝐸𝑔1
= 22 . (A. 17)
Retornando-se na equação (A. 12) com 𝐿2 se obtém o filtro preditivo de 2
coeficientes, e levando em conta que 𝑔22 𝑔21 1 , seja conhecido tal que juntamente
com 1 21 22 formem as duas soluções independente como:
𝑟𝐿 𝑟0 𝑟1 𝑟2
𝑟𝐿+1 𝑟1 𝑟0 𝑟1
1 021 𝑔21
22 𝑔21
0 1
= 0 00 0
Pode-se utilizar o relacionamento de Levinson para se obter o filtro de 3
coeficientes,

56
121
22
0
+ 𝐿2
0𝑔22
𝑔21
1
=
131
32
33
, (A. 18)
onde 𝐿3 = 33 pode ser calculado análogo a 𝐿2 = 22 . O procedimento pode ser
contínuo até a ordem 𝑛.

57
ANEXO B – FUNDAMENTAÇÃO MATEMÁTICA DA DECONVOLUÇÃO PREDITIVA
MULTICANAL
B.1 - Deconvolução preditiva multicanal.
A teoria da filtragem preditiva multicanal pode ser obtida generalizando o caso
monocanal, fazendo a substituição dos escalares por matrizes (PORSANI, 1997).
Como exemplo, vamos ilustrar uma situação em que cada traço deconvolvido é obtido
com uma janela de três traços. Admita que 𝑥(𝑡), 𝑦(𝑡) e 𝑧(𝑡) são os traços de entrada,
𝜔 𝑡 desejado e 𝜔 𝑡 o dado calculado. Desse modo, temos:
ω t = f t ∗ x t + g t ∗ y t + h t ∗ z t (B. 1)
𝑓 𝑡 , 𝑔 𝑡 e 𝑡 são operadores que atuam sobre os respectivos traços 𝑥(𝑡), 𝑦(𝑡) e
𝑧(𝑡). Para filtros de três coeficientes ao longo do traço, a equação B. 1 é dada por:
ω t = xt−k+1f k +
3
k=1
yt−k+1g k +
3
k=1
zt−k+1h k (B. 2)
3
k=1
Assim, a expressão do erro de predição pode ser escrita conforme a equação abaixo:
e t = ω t − ω t (B. 3)
que idealmente seria nulo.
Em notação matricial a equação B. 2 é representada como a seguir:
𝑾 = 𝑿 𝒀 𝒁 (B. 4)
Onde 𝑾 é uma matriz toeplitz construída pela matriz também toeplitz, 𝑿, 𝒀 e 𝒁 geradas
respectivamente pelos traços 𝑥𝑡 , 𝑦𝑡 e 𝑧𝑡 . E a é um vetor formado pelos operadores 𝑓 , 𝑔
e . Desse modo podemos definir
𝒂𝑇 = 𝒇𝑇 𝒈𝑇 𝒉𝑇 , (B. 5)
Onde os vetores 𝒇, 𝒈 e 𝒉 são formados respectivamente pelos operadores 𝑓 𝑡 , 𝑔 𝑡e 𝑡 .

58
Para um vetor 𝒂 arbitrário podemos escrever o vetor de erro de predição na forma
𝒆 = 𝑥 −𝑾𝒂 (B. 6)
Minimizando a forma quadrática
𝑄 𝒂 = 𝒆𝑇𝒆 (B. 7)
Obtêm-se as equações normais, cuja solução fornece o filtro preditivo multicanal de WL
(Lima, 1999; Santos Júnior, 2012; Maciel et al. 2003). O sistema de equações normais
é resolvido aplicando-se a recursão de Levinson demonstrada a seguir.
Fazendo a saída desejada 𝜔 𝑡 corresponder a um dos canais de entrada, avançado
de 𝐿 amostras, 𝜔𝑡 = 𝑥𝑡+𝐿. A solução do sistema de equações fornecerá os coeficientes
do operador preditivo multicanal, com distância de predição 𝐿.
B.2 - Recursão de Levinson multicanal.
Tomando como base o filtro monocanal, é possível representar a forma ampliada
das ENs, como apresentado a baixo:
𝑧𝑇𝑧 𝑧𝑇𝑊0 𝑧𝑇𝑊1 ⋯ 𝑧𝑇𝑊𝑁−1
𝑊0𝑇𝑧 𝑅0 𝑅−1 ⋯ 𝑅−(𝑁−1)
𝑊1𝑇𝑧 𝑅1 𝑟0 ⋱ ⋮⋮ ⋮ ⋱ ⋱ 𝑅−1
𝑊𝑁−1𝑇 𝑧 𝑅𝑛−1 ⋯ 𝑅1 𝑅0
1𝑐𝑁1
⋮⋮𝐶𝑁𝑁
=
𝐸𝑐𝑁0⋮⋮0
(B. 8)
onde 𝑐𝑁𝑗 = −�͂�𝑁𝑗 𝑗 = 1,… ,𝑁.
O Sistema representado pela equação (B. 8), sendo resolvido pelo princípio de
recursão de Levinson multicanal. Temos:
𝑧𝑇𝑧 𝑧𝑇𝑊0
𝑊0𝑇𝑧 𝑅0
1𝐶11
= 𝐸𝑐1
0 (B. 9)
Resolvendo para 𝐶11

59
𝐶11 = 𝑅0−1𝑤0
𝑇𝑧 .
Da mesma forma, o subsistema reverso de ordem 1.
𝑅0 𝑅−1
𝑅1 𝑅0 𝐵11
𝐼 =
⊕𝐸𝐵1
(B. 10)
Onde 𝐼 é a matriz identidade e ⊕ representa a matriz 2𝑋2 com todos os elementos
nulos.
Resolvendo para 𝐵11 e 𝐸𝐵1, temos:
𝐵11 = −𝑅0−1𝑅−1
𝐸𝐵1= 𝑅0 + 𝑅1 𝐵11 .
Utilizando-se a expressão para 𝐵11 e considerando que 𝑅0 = 𝑅0𝑇 e 𝑅−1
𝑇 = 𝑅1, pode-se
confirmar diretamente que 𝐸𝐵1= 𝐸𝐵1
𝑇 .
O subsistema direto de ordem 2, a ser desenvolvido com base nas soluções das
equações (B. 9) e (B. 10), é dado por,
𝑧𝑇𝑧 𝑧𝑇𝑊0 𝑧𝑇𝑊1
𝑊0𝑇𝑧 𝑅0 𝑅−1
𝑊1𝑇𝑧 𝑅1 𝑟0
1𝑐21
𝐶22
= 𝐸𝑐2
00
(B. 11)
aplicando o principio de Levinson pode-se escrever,
1𝑐11
0
+ 𝑐22 0𝑇
𝐵11
𝐼
= 1𝑐21
𝐶22
(B. 12)
𝐸𝑐1 (𝑧𝑇𝑊0 𝑧𝑇𝑊1 )
𝐵11
𝐼
0 ⊕
𝑊1𝑇𝑧 𝑅1
1𝑐11 𝐸𝐵1
1𝑐22 =
𝐸𝑐2
0𝑓(𝑐22)
.

60
fazendo 𝑓 𝑐22 = 0 pode-se escrever a forma compacta, como:
𝐸𝑐1
𝛥𝑐1𝑇
𝛥𝑐1 𝐸𝐵1
1𝑐22 =
𝐸𝑐2
0 . (B. 13)
Onde,
𝛥𝑐1 = 𝑊1𝑇𝑧 𝑅1
1𝑐11 ,
𝛥𝑐1𝑇 = 𝑧𝑇𝑊0 𝑧𝑇𝑊1
𝐵11
𝐼 .
Resolvendo para 𝑐22 = −𝐸𝐵1−1𝛥𝑐1
𝑇 .
Fazendo uso da relação de Levinson,
1𝑐21
𝑐22
0
+ 𝑐33
0𝑇
𝐵22
𝐵21
𝐼
=
1𝑐31
𝐶32
𝐶33
(B. 14)
Na equação (B.8) e para um erro anteriormente determinado, tal que,
𝑅0 𝑅−1 𝑅−2
𝑅1 𝑅0 𝑅−1
𝑅2 𝑅1 𝑅0
𝐵22
𝐵21
𝐼
= ⊕⊕𝐸𝐵2
(B. 15)
é possível se obter a forma compacta, associada a 𝑐33 ,
𝐸𝑐2
𝛥𝑐2𝑇
𝛥𝑐2 𝐸𝐵2
1𝑐33 =
𝐸𝑐3
0 . (B. 16)
Resolvendo para 𝑐33 , e retornando na equação (B. 16), obtém-se a solução de
ordem 3. Esse procedimento pode ser estendido até a ordem 𝑛.