universidad pontificia comillas escuela tÉcnica … · sensorizar las velas de una embarcación de...
TRANSCRIPT
UNIVERSIDAD PONTIFICIA COMILLAS
ESCUELA TÉCNICA SUPERIOR DE INGENIERÍA (ICAI) – INGENIERÍA ELECTROMECÁNICA
1
Asistente al trimado de velas durante la navegación
RESUMEN DEL PROYECTO – ICAI, Universidad Pontificia Comillas
Autor: María Leticia Costas Juliani
Directores: Carlos Rodríguez - Morcillo García Jose Daniel Muñoz Fías
PALABRAS CLAVE: Catavientos, vela, trimado, sensor de presión, diferencia de presiontes. Julio 2017
—————————— ——————————
1 INTRODUCCIÓN Y OBJETIVOS
N los últimos años los dispositivos electrónicos se han ido adentrando cada vez más en la rutina dia-
ria; es un hecho que la digitalización se está extendiendo a todos los ámbitos posibles. Este deseo de automatizar los procesos más básicos se ha llevado también al mundo de la náutica, donde la electrónica ya jugaba un papel impor-tante, si no imprescindible. La mayor parte de las embar-caciones, ya sean de motor o vela, tienen instalados distin-tos equipos electrónicos, como GPS, radares, sonares o ra-dios, que no sólo proporcionan otra manera de disfrutar de la navegación, sino que la hacen más cómoda, segura y efi-ciente. La información que proporcionan estos sistemas electrónicos está totalmente enfocada al barco y su en-torno, midiendo la velocidad del mismo, la dirección del viento, su posición respecto a tierra... pero ningún sistema está enfocado a la optimización del trimado de la vela, fuera del ámbito de la competición de alto nivel.
Con este motivo, el objetivo de este proyecto es sensorizar las velas de una embarcación de recreo me-diante el diseño y construcción de un prototipo para la es-timación del trimado de la vela, a partir de la medida de la diferencia de presiones de ambas caras de la vela.
Dado su bajo coste, fácil instalación y una preci-sión suficiente para la ayuda al trimado de la vela, el sis-tema se ha enfocado tanto para su uso en el ocio particular, como para regatas no profesionales.
2 METODOLOGÍA
La metodología seguida para el desarrollo de este proyecto se puede resumir en los siguientes apartados:
- El análisis de requisitos y diseño del sistema, que incluye la elección de los componentes a emplear y el estudio del funcionamiento de los componentes elegidos.
- La programación y montaje del prototipo, reali-zando posteriores ensayos en el sistema una vez en-samblados.
- El estudio, elección e integración de la interfaz Hombre – Máquina a emplear.
3 DESARROLLO DEL SISTEMA
El sistema desarrollado tiene su origen en la inexisten-cia de un sistema tecnológico, fuera del ámbito de la alta regata, que mida o estime el trimado de la vela proporcio-nando al navegante una retroalimentación de la situación de la vela.
El prototipo creado pretende acercar la sensorización del barco desde un punto de vista más accesible y econó-mico para el amante de la náutica. El diseño y ligereza del sistema son importantes para no interferir en el flujo del viento, con el fin de que su peso no llegue a deformar la vela o afectar el vuelo de los catavientos de la misma.
Para la sensorización de la vela se ha planteado la utili-zación de sensores de presión, que miden la diferencia de presiones entre las caras de la vela. De esta manera, se pre-tende complementar la información visual que obtenemos del vuelo de los catavientos, situados en la vela.
Se han considerado tres posiciones posibles de los cata-vientos durante la navegación: la posición correcta que se pretende alcanzar, el vuelo de ambas lanillas de forma pa-ralela; la situación en la que la lanilla de sotavento no vuela correctamente por estar la vela demasiado cazada o, al con-trario, la situación en que la lanilla de barlovento no vuela porque la vela esta suelta y apenas pasa viento por esta cara interna.
3.1 Diseño del sistema
Se ha escogido el sensor de presión MPL115A, por pro-porcionar un rango de trabajo aproximado a la presión am-biente, que es la tomada como referencia, y tener una pre-cisión de 1 kPa, suficientemente alta y mejor que otros dis-positivos de bajo coste analizados. La programación del sensor se realiza a través de un microcontrolador, el ATMega328, en una placa de desarrollo Arduino UNO.
El sensor MPL115A es un sensor digital que determina la presión absoluta a partir de la medición de la tempera-tura y la presión ambientales. El protocolo de comunica-ciones entre microcontrolador y sensor es SPI, debiendo distinguir el dispositivo maestro (ATMega328) y el esclavo
E

PROYECTO FIN DE GRADO
ASISTENTE AL TRIMADO DURANTE LA NAVEGACIÓN
(los dos sensores de presión). La información enviada en-tre dispositivos se lleva a cabo a través de un cable largo de 4 pares que requiere de una transmisión lenta para reducir los efectos de atenuación en el cable y obtener una mejor calidad de la señal.
3.2 Funcionamiento del programa
Para la obtención de la presión absoluta es necesario lle-var a cabo una serie de pasos, que comienzan con la me-dida de la presión (Padc) y temperatura (Tadc), que se com-pensan con la presión y temperatura ambientales y una se-rie de coeficientes propios de cada sensor: los valores ini-ciales de temperatura (b2) y presión (a0) y la sensibilidad de los mismos (b1 presión, c12 temperatura), según la si-guiente ecuación.
𝑃𝑐𝑜𝑚𝑝 = 𝑎0 + (𝑏1 + 𝑐12 ∙ 𝑇𝑎𝑑𝑐) · 𝑃𝑎𝑑𝑐 + 𝑏2 · 𝑇𝑎𝑑𝑐 (1)
Esta presión compensada se convierte posteriormente a presión real según la siguiente ecuación.
𝑃𝑟𝑒𝑠𝑖ó𝑛 (𝑘𝑃𝑎) = 𝑃𝑐𝑜𝑚𝑝 · [(115 − 50)/1023] + 50 Para una mayor precisión de la medida obtenida,
se realiza la mediana de cada bloque de 10 presiones y así evitar el efecto de los posibles valores extremos. De esta manera, se procede calculando 10 medianas para, a partir de estos nuevos datos, calcular la diferencia de presiones entre los sensores.
Una vez conocida esta diferencia de presiones se puede establecer qué situación se está dando de las tres co-mentadas. Esta información, en función de la casuística que se esté dando, se muestra por la interfaz Hombre – Má-quina.
3.3 Estudio y elección de la interfaz Hombre – Máquina
La interfaz Hombre – Máquina se ha planteado me-diante la iluminación de distintos leds que determinan la casuística concreta en cada momento.
El código de colores se ha planteado de la siguiente manera: el led verde se ilumina cuando el cataviento de so-tavento no vuela, y el led rojo cuando el que no vuela es el de barlovento.
3.4 Montaje
Para realizar las pruebas sobre el prototipo ha sido ne-cesario instalar los sensores en una vela real y así poder estudiar el funcionamiento al emular el flujo de viento por la vela. Se ha empleado una vela de Optimist, que contaba con tres pares de catavientos instalados.
La puesta a punto de la vela se ha llevado a cabo me-diante la fabricación de un juego de palos de madera (más-til, botavara y percha) de manera que se pudo instalar en el laboratorio, fijar verticalmente y dar tensión a la super-ficie de la vela.
Los sensores se instalan próximos a las lanillas, a la
misma altura y uno en cada cara, y se fijan a la vela me-diante cinta adhesiva de doble cara.
4 RESULTADOS
Los resultados obtenidos (esto es, la diferencia de me-didas entre la presión de la cara exterior e interior de la vela) se presentan en la siguiente tabla para cada una de las situaciones consideradas:
BARLO-VENTO
PARA-LELO
SOTAVENTO
Diferen-cia de presio-nes
[-0.08, -0.07] kPa
[-0.04, -0.02] kPa
[0.02, 0.04] kPa
Antes de comentar los resultados, recordaremos el
teorema de Bernoulli sobre el movimiento de un fluido: Teorema de Bernoulli: La diferencia de velocidad de
un fluido por dos caras distintas de un sólido produce una dife-rencia de presión; cuando aumenta la velocidad la presión del fluido disminuye y cuando la velocidad se reduce aumenta la pre-sión.
La diferencia de presión entre las dos caras de la vela genera la fuerza de sustentación, que provoca el mo-vimiento del barco. Debido a la forma de la vela, el viento pasa por la cara externa más rápido que por la interna, ge-nerando así mayor presión en barlovento. El resultado de la emulación del vuelo paralelo de las lanillas (PARALE-LO), es ligeramente negativo, lo que indica que es mayor la presión en la cara de barlovento que en sotavento, cum-pliendo el teorema de la sustentación e indicando que el viento fluye correctamente.
En la situación en la que el barco navega en un rumbo demasiado orzado para la posición de la vela o que se navega con la vela demasiado suelta (BARLOVENTO), los resultados indican que la diferencia de presiones entre sotavento y barlovento es muy negativa (en comparación); es decir, que hay más presión en la cara interior que en la exterior.
Sucede lo contrario en la situación en la que el barco navega en un rumbo demasiado arribado (SOTA-VENTO) para la posición de la vela (o que se está nave-gando con la vela demasiado cazada), la diferencia de pre-siones es positiva, indicando que hay más presión en la su-perficie exterior que en la interior.
1 Montaje final del sistema sensores - vela

ASISTENTE AL TRIMADO DE VELAS DURANTE LA NAVEGACIÓN 3
5 CONCLUSIONES
El objetivo principal de este Proyecto es verificar la via-bilidad de un sistema de estimación del trimado de la vela de una embarcación de recreo mediante su sensorización. La idea es viable y se ha demostrado mediante el diseño y construcción del prototipo del sistema.
A pesar de que las condiciones de prueba del prototipo no han sido las óptimas debido a la escasez de recursos, como los materiales utilizados para el juego de palos o la utilización de ventiladores para la emulación del viento, se ha conseguido dar los primeros pasos en el desarrollo de una nueva tecnología que facilita el manejo de las velas, tanto a nivel amateur como navegantes avanzados.
Se ha comprobado que, mediante el uso de sensores de presión, se puede estimar el comportamiento de una vela, y utilizando un túnel de viento más apropiado con el que se consiga aplicar aire a la superficie completa de la vela, se podría optimizar la estimación de los movimientos de los catavientos, y a partir de los mismos proporcionar ins-trucciones al patrón del barco para mejorar la navegación.
En conclusión, los resultados han sido satisfactorios. En concreto, se ha conseguido diferenciar con las medidas de los sensores las situaciones en las que la vela está dema-siado suelta o demasiado cazada. Esto implica que, utili-zando sensores de mayor precisión, sería posible indicar al patrón cómo corregir el rumbo, o incluso en un futuro, au-tomatizar este proceso y sea la vela la que se corrija a sí misma sin la necesidad de un tripulante que tenga que tri-marla.
6 BIBLIOGRAFÍA
Fondear.com. (2017). Electrónica naval: electrónica para
barcos, equipos electrónicos. [online] Disponible
en: http://www.fondear.com/Todo_Em-
presa/ElectNaval_Links/electronica.htm [Acceso
en febrero 2017]
YouTube. (2017). La electrónica en los barcos de vela de
alta competición En la EVV (Escuela virtual de
Vela). [online] Disponible en:
https://www.youtube.com/watch?v=1_qI_LJHtjY
[Acceso en febrero 2017]
Vspars.com. (2017). VSPARS Sail Vision. [online] Disponi-
ble en: http://www.vspars.com/sails.aspx [Acceso
en febrero 2017]
Navegacionelectronica.com (2017). Equipos a bordo. [on-
line]. Disponible en: http://www.navegacionelec-
tronica.com/equipos_a_bordo.asp [Acceso en fe-
brero 2017]
Coulton.com. (2017). Beginner’s guide to Differential
Pressure Transmitters. [online] Disponible en:
http://www.coulton.com/begin-
ners_guide_to_differential_pressure_transmit-
ters.html [Acceso en Abril 2017]
Refit-dm.blogspot.com.es. (2017). Teoría de la vela. [on-
line] Disponible en: http://refit-
dm.blogspot.com.es/2012/01/teoria-de-la-
vela.html [Acceso en marzo 2017]
Viola, I. and Flay, R. (2011). Sail aerodynamics: Under-
standing pressure on upwind sails. Experimental
Thermal and Fluid Science, 35(8), pp. 1497 –
1504.
Manualvuelo.com. (2017). 1.2 PRINCIPIOS AERODINA-
MICOS. [online] Disponible en: http://www.ma-
nualvuelo.com/PBV/PBV12.html [Acceso en ju-
nio 2017]
Rodríguez – Morcillo, Carlos y Alexandres, Sadot. (2016).
Comunicaciones industriales.

UNIVERSIDAD PONTIFICIA COMILLAS
ESCUELA TÉCNICA SUPERIOR DE INGENIERÍA (ICAI) – INGENIERÍA ELECTROMECÁNICA
1
Trim assistant while sailing PROJECT SUMMARY– ICAI, Universidad Pontificia Comillas
Author: Maria Leticia Costas Juliani
Directors: Carlos Rodriguez - Morcillo García Jose Daniel Muñoz Fías
KEY WORDS: Wind vane, sails, trim, pressure sensor, pressure difference. July 2017
—————————— ——————————
1 INTRODUCTION AND OBJECTIVES
LECTRONIC devices have become an important feature in our lives as the digital world is spreading
in every possible field. This desire of automating the most basic processes has also been introduced in the nautical world, where electronics already play an important role. Whether motor or sailing boats, most have different elec-tronic equipment such as GPS, radars, sonars or radios, that not only provide another way of enjoying navigation but give comfortability, safety and efficiency. The infor-mation provided by these electronic systems is completely focused on the boat and its environment, measuring the boat’s speed, telling the direction of the wind, the position regarding the shore… but none of the information availa-ble gives intel on the sail’s trim outside the high competi-tion world.
This project tries to sensorizate the sails of a sail-maker by designing and builiding the prototype of an esti-mation system for the trim of the sail by the measurement of the pressure difference on both sides of the sail.
The system is intended both for leisure and non – professional regattas. It is low cost, easily installed and has enough precision to make it a good assistant to trimming sails while navigating despite its few limitations.
2 METHODOLOGY
The steps followed for the correct development of this project are summed up as follows:
- Requirements analysis and system design, includ-ing choosing the components, and the study of functional features of the chosen components.
- Programming and assembling of the prototype, car-rying out subsequent tests in the system once as-sembled.
- Studying, selecting and integrating the Man - Ma-chine interface to be used.
3 SYSTEM DEVELOPMENT
The developed system is originated by the lack of a technological system that measures or estimates the trim of the sail, providing feedback on the sail’s situation to the sailor.
The created prototype intends to bring a more accessi-ble approach of the sensorizated boat to the Nautica’s lov-ers. The design and lightness of the system are important in order to not interfere with the wind Flow and so that the weight does not stretch the sail or affect the flight of the sail’s windbreaks.
For the sail’s sensorization it has been used a pressure sensor for the difference between pressures in each side of the sail measurement. By means of this data it is possible to complement the visual information that we obtain from the flight of the wind vane located on the sail. Three possi-ble positions of the wind vane are considered during nav-igation: the correct trim in which tell-tales flight parallelly; the situation in which the leeward wind vane does not flight correctly for over trimming the sail or, on the oppo-site, the situation where the windward wind vane does not flight because the sail is too eased and there’s almost no wind flow in that face.
3.1 System design
The chosen pressure sensor is the MPL115A (Sparkfun), for providing a working range approximated to ambient pressure, our reference, and allowing a 1 kPa precision. The sensor’s programming is made through a microcon-troller, the ATMega328, in an Arduino Uno board.
The MPL115A1 is a digital sensor that measures Ab-solut pressure by measuring temperature and ambient pressure. The communication protocol used between mi-crocontroller and sensor is SPI, where we differentiate be-tween master (ATMega328) and slave (pressure sensors). The information sent from one device to another is trans-mitted through a long 4 paired cable that requires a slow transmission for reducing induction interferences and ob-tain a clearer signal.
3.2 Program performance
For the obtention of the Absolute pressure there are some steps to follow in order of treating the measured sig-nal. First, pressure and temperature are measured, and then compensated with a series of coefficients that belong to each sensor, the initial values of the temperature (b2) and the pressure (a0), and the sensitivity of the same (b1 pressure, c12 temperature), following the next equation.
E
PROYECTO FIN DE GRADO
ASISTENTE AL TRIMADO DURANTE LA NAVEGACIÓN
𝑃𝑐𝑜𝑚𝑝 = 𝑎0 + (𝑏1 + 𝑐12 ∙ 𝑇𝑎𝑑𝑐) · 𝑃𝑎𝑑𝑐 + 𝑏2 · 𝑇𝑎𝑑𝑐 (1)
This compensated pressure is turnt to real pressure as follows:
𝑃𝑟𝑒𝑠𝑠𝑢𝑟𝑒 (𝑘𝑃𝑎) = 𝑃𝑐𝑜𝑚𝑝 · [(115 − 50)/1023] + 50 To obtain measures with a greater precision, the
median of each block of 10 pressures is calculated and avoid possible outliers. This way we proceed calculating 10 medians and, with this new data, the pressure difference between cs0 and cs1 is calculated.
It is after this pressure difference data that the de-cision is taken on how to proceed, if it’s necessary to change courses or trim the wind, and then display this information on the Human – Machine Interface.
These steps are needed due to the poor precision of the chosen sensors and to facilitate the comparison be-tween both pressures.
3.3 Human – Machine Interface study and election
The Human – Machine Interface has been set by the lighting of two different leds that determine each casuistic. The color code is as follows: The Green led is lit when the leeward wind vane does not flight correctly, and the red led is it when the one that doesn’t flight correctly is the up-wind one.
3.4 Assemblage
To test in the prototype, it has been necessary to install the sensor on a real sail for studying it’s functioning while forcing wind through the sail. An Optimist sail has been used that already brought three pairs of wind vanes.
The tuning of the sail was made by fabricating a rigging (mast, boom and spars) with wooden sticks so that the sail could be pinned up and tense the superficies. The follow-ing image shows the final assemblage of rigging, sail and sensors.
The sensors are installed next to the wind vanes, at the
same height and one in each face of the sail, stuck with ad-hesive paper.
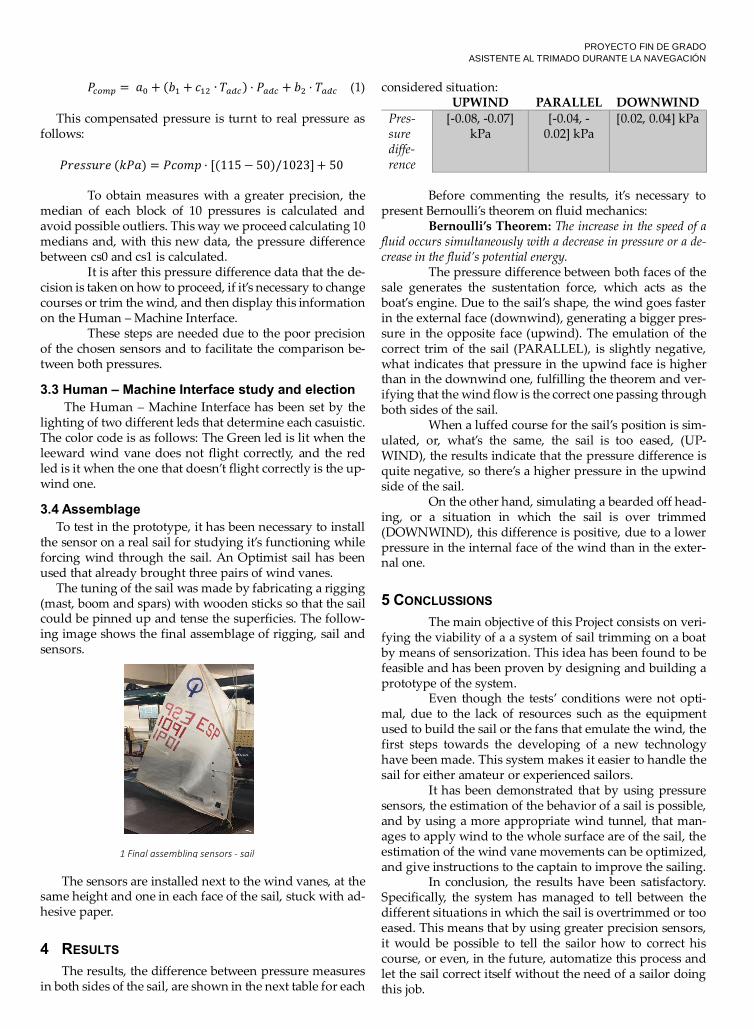
4 RESULTS
The results, the difference between pressure measures in both sides of the sail, are shown in the next table for each
considered situation: UPWIND PARALLEL DOWNWIND Pres-sure diffe-rence
[-0.08, -0.07] kPa
[-0.04, -0.02] kPa
[0.02, 0.04] kPa
Before commenting the results, it’s necessary to
present Bernoulli’s theorem on fluid mechanics: Bernoulli’s Theorem: The increase in the speed of a
fluid occurs simultaneously with a decrease in pressure or a de-crease in the fluid’s potential energy.
The pressure difference between both faces of the sale generates the sustentation force, which acts as the boat’s engine. Due to the sail’s shape, the wind goes faster in the external face (downwind), generating a bigger pres-sure in the opposite face (upwind). The emulation of the correct trim of the sail (PARALLEL), is slightly negative, what indicates that pressure in the upwind face is higher than in the downwind one, fulfilling the theorem and ver-ifying that the wind flow is the correct one passing through both sides of the sail.
When a luffed course for the sail’s position is sim-ulated, or, what’s the same, the sail is too eased, (UP-WIND), the results indicate that the pressure difference is quite negative, so there’s a higher pressure in the upwind side of the sail.
On the other hand, simulating a bearded off head-ing, or a situation in which the sail is over trimmed (DOWNWIND), this difference is positive, due to a lower pressure in the internal face of the wind than in the exter-nal one.
5 CONCLUSSIONS
The main objective of this Project consists on veri-fying the viability of a a system of sail trimming on a boat by means of sensorization. This idea has been found to be feasible and has been proven by designing and building a prototype of the system.
Even though the tests’ conditions were not opti-mal, due to the lack of resources such as the equipment used to build the sail or the fans that emulate the wind, the first steps towards the developing of a new technology have been made. This system makes it easier to handle the sail for either amateur or experienced sailors.
It has been demonstrated that by using pressure sensors, the estimation of the behavior of a sail is possible, and by using a more appropriate wind tunnel, that man-ages to apply wind to the whole surface are of the sail, the estimation of the wind vane movements can be optimized, and give instructions to the captain to improve the sailing.
In conclusion, the results have been satisfactory. Specifically, the system has managed to tell between the different situations in which the sail is overtrimmed or too eased. This means that by using greater precision sensors, it would be possible to tell the sailor how to correct his course, or even, in the future, automatize this process and let the sail correct itself without the need of a sailor doing this job.
1 Final assembling sensors - sail
SAIL TRIM ASSISTANT 3
6 BIBLIOGRAFÍA
Fondear.com. (2017). Electrónica naval: electrónica para
barcos, equipos electrónicos. [online] Available
at: http://www.fondear.com/Todo_Em-
presa/ElectNaval_Links/electronica.htm [Ac-
cessed on Feb. 2017]
YouTube. (2017). La electrónica en los barcos de vela de
alta competición En la EVV (Escuela virtual de
Vela). [online] Available at:
https://www.youtube.com/watch?v=1_qI_LJHtjY
[Accessed on Feb. 2017]
Vspars.com. (2017). VSPARS Sail Vision. [online] Availa-
ble at: http://www.vspars.com/sails.aspx [Ac-
cessed on Feb. 2017]
Navegacionelectronica.com (2017). Equipos a bordo.
[online]. Available at: http://www.navegacion-
electronica.com/equipos_a_bordo.asp
Coulton.com. (2017). Beginner’s guide to Differential
Pressure Transmitters. [online] Available at:
http://www.coulton.com/begin-
ners_guide_to_differential_pressure_transmit-
ters.html [Accessed on Apr. 2017]
Refit-dm.blogspot.com.es. (2017). Teoría de la vela.
[online] Available at: http://refit-dm.blog-
spot.com.es/2012/01/teoria-de-la-vela.html [Ac-
cessed on Mar.2017]
Viola, I. and Flay, R. (2011). Sail aerodynamics: Under-
standing pressure on upwind sails. Experimental
Thermal and Fluid Science, 35(8), pp. 1497 –
1504.
Manualvuelo.com. (2017). 1.2 PRINCIPIOS AERO-
DINAMICOS. [online] Available at:
http://www.manualvuelo.com/PBV/PBV12.html
[Accessed on Jun. 2017]
Rodríguez – Morcillo, Carlos y Alexandres, Sadot. (2016).
Comunicaciones industriales.