universidad de sevilla -...
TRANSCRIPT

Universidad de Sevilla
Escuela Superior de Ingenieros
Departamento de Ingeniería de Sistemas y Automática.
Proyecto Fin de Carrera
Modelo y Control LQR de una aeronave de cuatro rotores.
Realizado por: D. Juan María Díaz Cano.
Dirigido por: Dr. Manuel López Martínez.
Ingeniería en Automática y Electrónica Industrial
Sevilla, 9 de Julio de 2007

Modelo y Control LQR de una aeronave de cuatro rotores
JUAN Mª DÍAZ CANO. 2
Prefacio. En el siguiente proyecto fin de carrera se abordará el tema de los vehículos
aéreos autónomos sin tripulación (UAVs), concretamente se estudiará el helicóptero de cuatro rotores, sistema Quad-Rotor. Se describirán dos modelos no lineales, el modelo reducido y el modelo completo. El modelo reducido no tiene incorporado las ecuaciones no lineales de los motores de corriente continua, mientras que el modelo completo incluye estas ecuaciones. Se analizan diferentes técnicas de control, control LQR, LQR con efecto integral y control clásico PI, aplicadas todas ellas al modelo no lineal del Quad-Rotor. Además, se comprueba la robustez de dichos controladores cuando el sistema es sometido a diversas perturbaciones mantenidas, como podría suceder al realizar un vuelo al aire libre.
En el capítulo 1 se describen las ecuaciones diferenciales que modelan la dinámica del Quad-Rotor, junto con los parámetros y las constantes que intervienen en dicho modelo.
El sistema propulsor es el encargado de impulsar al helicóptero en sus desplazamientos y se describirá en el capítulo 2. En él, se realiza un estudio de los diferentes motores de corriente continua que existen en el mercado para seleccionar cual es el apropiado para implementarlo en el modelo completo.
En cambio, en el capítulo 3, se efectúa el estudio de la relación matemática que sustituirá a las ecuaciones diferenciales de los motores de corriente continua en el modelo reducido.
Para realizar el cálculo de los diferentes controladores LQR se usan las ecuaciones linealizadas del sistema no lineal, con la ayuda de una herramienta implementada en Matlab y diseñada para dicho fin. Esta herramienta se denomina Control_Quad_Rotor (explicada en el Anexo II). Todo esto se detallará en el capítulo 4.
El capítulo 5 muestra las diferentes técnicas de control aplicadas al sistema propulsor, PI y PI Antiwind-Up y las estructuras de control LQR que son implementadas en el Quad-Rotor.
Para comprobar la necesidad de utilizar un controlador se estudia, en el capítulo 6, la estabilidad del sistema en bucle abierto y en bucle cerrado.
A continuación, en el capítulo 7, se diseñará y simularán los controladores LQR, LQR ganancias tabulada y LQR con efecto integral, estudiados en el capítulo 5, sobre el Quad-Rotor para comprobar su funcionamiento.
En los capítulos 8, 9 y 10 se simularán las diversas estrategias de control estudiadas en los capítulos anteriores, tanto en el modelo completo como en el reducido. En el capítulo 8 el controlador simulado es el LQR, en el 9 es el LQR selectivo y, por último, en el capítulo 10 se simula el control LQR con efecto integral.

Modelo y Control LQR de una aeronave de cuatro rotores
JUAN Mª DÍAZ CANO. 3
Índice.
1 CAPÍTULO: QUAD-ROTOR. 6
1.1 INTRODUCCIÓN. 6 1.2 DESCRIPCIÓN DEL MODELO. 6 1.3 DINÁMICA DEL QUAD-ROTOR. 7
2 CAPÍTULO. SISTEMA DE PROPULSIÓN. 10
2.1 INTRODUCCIÓN. 10 2.2 CARACTERÍSTICAS DE LOS MOTORES DC. 11 2.3 MODELO DINÁMICO DE LOS MOTORES. 11 2.4 MODELO DE PRIMER ORDEN DEL MOTOR DC. 14 2.4.1 MOTOR DC, REFERIDO A “Ω1”. 14 2.4.2 MOTOR DC, REFERIDO A “Ω2” (SISTEMA PROPULSOR). 15 2.5 ESTUDIO DEL MOTOR. 16 2.5.1 MOTOR SIN CARGA (τCARGA = 0). 16 2.5.2 MOTOR CON CARGA (τCARGA ≠ 0). 17 2.6 MODELO REDUCIDO. 18 2.6.1 REPRESENTACIÓN GRÁFICA, U (N) Y V (V). 19
3 CAPÍTULO. MODELOS IMPLEMENTADOS. 21
3.1 INTRODUCCIÓN. 21 3.2 MODELO REDUCIDO. 21 3.3 MODELO COMPLETO. 22
4 CAPÍTULO. LINEALIZACIÓN DEL MODELO. 24
4.1 INTRODUCCIÓN. 24 4.2 PUNTO DE EQUILIBRIO. 24 4.3 LINEALIZACIÓN DEL MODELO. 24 4.3.1 LINEALIZACIÓN DEL MODELO USANDO MATLAB. 30 4.3.2 VALORES DE A, B, C, D, DE FORMA ANALÍTICA Y USANDO MATLAB. 30
5 CAPÍTULO. ESTRUCTURAS DE CONTROL. 31
5.1 INTRODUCCIÓN. 31 5.2 CONTROLADOR. 31 5.3 CONTROL LQR. 32 5.4 CÁLCULO DEL CONTROL LQR CON MATLAB. 34 5.5 CONTROLADOR PI DEL SISTEMA DE PROPULSIÓN. 34 5.5.1 SIMULACIÓN DEL PI SIN ANTIWIND-UP 35 5.6 CONTROL PI CON ANTIWIND-UP. 37 5.6.1 SIMULACIÓN DEL PI CON ANTIWIND-UP 37 5.7 CONTROL LQR CON EFECTO INTEGRAL. 39 5.8 CONTROL LQR SELECTIVO. 40
6 CAPÍTULO. ESTABILIDAD. 42

Modelo y Control LQR de una aeronave de cuatro rotores
JUAN Mª DÍAZ CANO. 4
6.1 INTRODUCCIÓN. 42 6.2 COMPORTAMIENTO EN BUCLE ABIERTO. 42 6.3 COMPORTAMIENTO EN BUCLE CERRADO. 44
7 CAPÍTULO. SINTONIZACIÓN DEL CONTROLADOR LQR. 46
7.1 INTRODUCCIÓN. 46 7.2 ZONAS DE FUNCIONAMIENTO. 46 7.3 LQR ÚNICO. 47 7.3.1 LQR EFECTO INTEGRAL. 50 7.3.1.1 LQR efecto integral (con mayor ponderación). 54 7.4 LQR SELECTIVO. 57 7.5 CONCLUSIÓN. 62
8 CAPÍTULO. SIMULACIONES DEL CONTROLADOR LQR ÚNICO. 63
8.1 INTRODUCCIÓN. 63 8.2 SIMULACIONES CON EL MODELO REDUCIDO. 63 8.2.1 CAMBIO DE LA REFERENCIA EN UN EJE. 63 8.2.2 CAMBIO DE LA REFERENCIA EN VARIOS EJES. 67 8.2.3 PERTURBACIONES MANTENIDAS. 69 8.3 SIMULACIONES CON EL MODELO COMPLETO. 74 8.3.1 CAMBIO DE LA REFERENCIA EN UN EJE. 74 8.3.2 CAMBIO DE LA REFERENCIA EN VARIOS EJES. 79 8.3.3 PERTURBACIONES MANTENIDAS. 80 8.4 CONCLUSIÓN. 86
9 CAPÍTULO. SIMULACIONES DEL CONTROL LQR SELECTIVO. 87
9.1 INTRODUCCIÓN. 87 9.2 SIMULACIONES CON EL MODELO REDUCIDO. 88 9.2.1 CAMBIO DE LA REFERENCIA EN UN EJE. 89 9.2.2 CAMBIO DE LA REFERENCIA EN VARIOS EJES. 94 9.2.3 PERTURBACIONES MANTENIDAS. 95 9.3 SIMULACIONES CON EL MODELO COMPLETO. 102 9.3.1 CAMBIO DE LA REFERENCIA EN UN EJE. 102 9.3.2 CAMBIO DE LA REFERENCIA EN VARIOS EJES. 110 9.3.3 PERTURBACIONES MANTENIDAS. 112 9.4 CONCLUSIÓN. 119
10 CAPÍTULO. SIMULACIONES DEL CONTROLADOR LQR ÚNICO CON EFECTO INTEGRAL. 120
10.1 INTRODUCCIÓN. 120 10.2 SIMULACIONES CON EL MODELO REDUCIDO. 120 10.2.1 CAMBIO DE LA REFERENCIA EN UN EJE. 121 10.2.2 CAMBIO DE LA REFERENCIA EN VARIOS EJES. 124 10.2.3 PERTURBACIONES MANTENIDAS. 126 10.2.4 PERTURBACIONES MANTENIDAS (LQR INTEGRAL “CON MAYOR PONDERACIÓN”). 130 10.3 SIMULACIONES CON EL MODELO COMPLETO. 136 10.3.1 CAMBIO DE LA REFERENCIA EN UN EJE. 136 10.3.2 CAMBIO DE LA REFERENCIA EN VARIOS EJES. 140

Modelo y Control LQR de una aeronave de cuatro rotores
JUAN Mª DÍAZ CANO. 5
10.3.3 PERTURBACIONES MANTENIDAS. 142 10.3.4 PERTURBACIONES MANTENIDAS (LQR INTEGRAL “CON MAYOR PONDERACIÓN”). 148 10.4 CONCLUSIÓN. 153
11 CAPÍTULO. CONCLUSIÓN FINAL. 155
12 CAPÍTULO. FUTURAS AMPLIACIONES. 156
13 ANEXO I. 157
13.1 ARCHIVOS DEL CONTROL_QUAD-ROTOR. 157 13.2 FUNCIONAMIENTO DEL CONTROL_QUAD-ROTOR. 158 13.2.1 CALCULAR PUNTO DE EQUILIBRIO Y MATRICES A, B, C, D. 159 13.2.2 CALCULAR LQR EN EL PUNTO DE EQUILIBRIO. 160 13.2.3 CALCULAR LQR PAR X, Y, Z, Ψ. 161 13.2.4 CALCULAR VARIOS LQR PARA DIFERENTES REFERENCIAS DE X, Y, Z, Ψ. 161 13.2.5 SIMULACIÓN MODELO QUAD-ROTOR REDUCIDO. 162 13.2.6 SIMULACIÓN MODELO QUAD-ROTOR COMPLETO. 163
14 ANEXO II. 164
15 REFERENCIAS. 166

Modelo y Control LQR de una aeronave de cuatro rotores
JUAN Mª DÍAZ CANO. 6
1 Capítulo: Quad-Rotor.
1.1 Introducción.
En este capítulo se realizará el estudio del modelo matemático del Quad-Rotor. Figura 1.
En el avión Quad-Rotor se ha visto un interés cada vez mayor en la comunidad de investigación durante los últimos años, para su modelado y control. La introducción de nuevos sensores más ligeros para medir la actitud y la velocidad angular de un cuerpo rígido permite nuevas versiones de helicópteros.
El Quad-Rotor, con su diseño simétrico, tiene una ventaja respecto al helicóptero tradicional en términos de maniobrabilidad y simplicidad mecánica. De hecho, los vehículos aéreos autónomos sin tripulación (UAVs) han ganado terreno en usos donde es difícil o peligrosa la interacción humana.
La estabilización se podría considerar el componente más importante para el vuelo y es esencial para los aviones autónomos, tal como el Quad-Rotor.
Como su diseño es inestable se ha propuesto realizar un controlador para estabilizar la actitud del Quad-Rotor.
1.2 Descripción del modelo.
El Quadrotor consiste en un marco cruzado rígido con cuatro rotores en los extremos. Los motores son de imán permanente que engranan por medio de una reductora a una hélice, figura 1.1. El diseño es simétrico.
Una diferencia significativa entre este avión y un helicóptero tradicional es la ausencia de cíclicos para variar el ángulo en el eje de rotación. Sin embargo, en el modelo del Quad-Rotor las variaciones en el empuje a cada rotor son aplicadas variando la velocidad del rotor. Este diseño particular permite el vuelo vertical, despegue y aterrizaje similar a un helicóptero tradicional.
Las maniobras de vuelo del Quad-Rotor son las siguientes:
Según la figura 1.1 los rotores delanteros y posteriores, numerados 1 y 3, rotan en sentido horario, mientras que los rotores izquierdos y derechos, numerados 4 y 2, rotan en sentido antihorario. Los rotores sólo pueden girar en el sentido indicado y no en dirección contraria. Por supuesto, esto limita las posibilidades de vuelo, como el “vuelo invertido” o algunas maniobras agresivas.
Para entender las características del vuelo del Quad-Rotor, primero se considera: Modelo de Quad-Rotor en cero. El vuelo vertical se consigue aumentando (o disminuyendo) la velocidad de cada rotor en la misma proporción. Esto aumentará (o disminuirá) el empuje total aplicado al avión permitiendo que ascienda (o descienda).

Modelo y Control LQR de una aeronave de cuatro rotores
JUAN Mª DÍAZ CANO. 7
Figura 1.1. Modelo Quad-Rotor.
El giro sobre el eje ‘X’, “ROLL”, se consigue aumentando el empuje del rotor 2 (4) y disminuyendo el empuje al rotor 4 (2) para un roll negativo (positivo). Igualmente, el movimiento sobre el eje y, “PITCH”, se alcanza aumentando el empuje al rotor 1 (3) y disminuyendo el empuje al rotor 3 (1) para un pitch negativo (positivo). Para el roll o pitch, el aumento del empuje en un rotor es proporcional a la disminución del empuje para el rotor opuesto. El movimiento de giro del Quad-Rotor es similar a un helicóptero tradicional, porque se aprovecha de los efectos de torsión de los rotores. Por lo tanto, cuando la suma de los esfuerzos de torsión de los rotores 1 y 3 es igual a la de los rotores 2 y 4, no hay acción de giro.
Cuando se desea realizar un giro sobre sí mismo, eje z, “YAW”, se necesita aumentar el empuje de los rotores 1 y 3 (disminuir) y disminuir los de los rotores 2 y 4 (aumentar) en la misma proporción, para conseguir un yaw negativo (positivo).
1.3 Dinámica del Quad-Rotor.
El helicóptero es uno de los sistemas más complejos del vuelo que existen. Esto es debido en parte al número de los efectos físicos que actúan simultáneamente.
• Efectos aerodinámicos: rotación de los rotores ( 2Ωk ).
• Inercia torques: Cambios de velocidad en la hélice ( Ω&J ).
• Efectos giroscópicos: Cambio de orientación del cuerpo ( θθψ ΩJJ , ).
• Gravedad y fricciones ( ψθφ &&& ,,,kmg ).
Este sistema tiene seis grados de libertad y cuatro entradas, siendo un sistema subactuado.

Modelo y Control LQR de una aeronave de cuatro rotores
JUAN Mª DÍAZ CANO. 8
El modelo dinámico del Quad-Rotor que se ha escogido por ser más realista es el descrito por Samir Bouabdallah [1], ya que incluye los fenómenos físicos descritos anteriormente, en otros modelos del Quad-Rotor estos fenómenos se han despreciado.
El modelo dinámico se basa en las ecuaciones de Newton-Euler, pero son iguales que si se obtuviesen por LaGrange. Las ecuaciones 1.1-1.6 son las que modelan la dinámica del Quad-Rotor.
( ) ( ) ( ) ( ) ( )
( ) ( ) ( ) ( ) ( )
( ) ( )
;1
;1
;1
;coscos
;cossinsinsincos
;sinsincossincos
4
3
2
1
1
1
UII
II
UII
JI
II
UII
JI
II
Um
gz
Um
y
Um
x
zz
yx
yy
r
y
xz
xx
r
x
zy
+⎟⎟⎠
⎞⎜⎜⎝
⎛ −=
+Ω+⎟⎟⎠
⎞⎜⎜⎝
⎛ −=
+Ω−⎟⎟⎠
⎞⎜⎜⎝
⎛ −=
+−=
−=
+=
θφφ
φψφθ
θψθφ
θφ
ψφψθφ
ψφψθφ
&&&&
&&&&&
&&&&&
&&
&&
&&
(1.1 - 1.6)
Las ecuaciones 1.7-1.10 son las entradas del sistema, que representan las fuerzas aplicadas por los cuatro rotores Ω1, Ω2, Ω3 y Ω4.
( )( )( )( ) ;;
;
;
24
23
22
214
23
213
24
222
24
23
22
211
Ω+Ω−Ω+Ω−=
Ω+Ω−=
Ω+Ω−=
Ω+Ω+Ω+Ω=
dU
lbU
lbU
bU
(1.7 - 1.10)
La ecuación 1.11 simula las perturbaciones producidas por los rotores.
;4321 Ω+Ω−Ω+Ω−=Ω (1.11)
En el modelo del Quad-Rotor, se incluirá la dinámica de los motores para hacerlo más realista. En el artículo en el cual se basa el modelo del Quad-Rotor, el efecto de los motores lo desprecian.
En la tabla 1 se describe la nomenclatura usada en el modelo del Quad-Rotor. En la tabla 2 se expone los valores usados en este modelo [2] que corresponde en la realidad al Draganflyer r/c (www.rctoys.com) figura 1.2.

Modelo y Control LQR de una aeronave de cuatro rotores
JUAN Mª DÍAZ CANO. 9
Figura 1.2. Draganflyer r/c.
Nombre Descripción Unidad U1 Empuje vertical de los rotores N U2 Momento para el ROLL N U3 Momento para el PITCH N U4 Momento para el YAW N ψθφ ,, Ángulo ROLL, PITCH, YAW del Quad-Rotor Rad ψθφ &&& ,, Velocidad ROLL, PITCH, YAW del Quad-Rotor Rad/s
ψθφ &&&&&& ,, Aceleración ROLL, PITCH, YAW del Quad-Rotor Rad/s2
x, y, z Posición del Quad-Rotor m zyx &&&&&& ,, Aceleración del Quad-Rotor m/s2
g Gravedad m/s2
m Masa del Quad-Rotor Kg Jr Inercia del rotor (motor + reductora + hélice). Kgm2 Ω Perturbación de los rotores Rad/s Ωi Velocidad angular de los rotores Rad/s
Ix, Iy, Iz Inercia del Quad-Rotor Kgm2 l Longitud del centro de masa al rotor m d Drag Nms2
b Factor de arrastre Ns2
Tabla 1. Modelo del Quad-Rotor
Nombre Descripción Valor Unidad g Gravedad 9.8 m/s2 m Masa del Quad-Rotor 0.52 Kg Jr Inercia del rotor (motor + reductora + hélice). 8.66-7 Kgm2 Ωi Velocidad angular de los rotores 0 – 278 rad/s Ix Inercia en x del Quad-Rotor 6.228-3 Kgm2
Iy Inercia en y del Quad-Rotor 6.225-3 Kgm2
Iz Inercia en z del Quad-Rotor 1.121-2 Kgm2 l Longitud del centro de masa al rotor 0.235 m
d Drag 7.5-7 Nms2
b Factor de arrastre 3.13-5 Ns2
Tabla 2. Valores usados en el modelo del Quad-Rotor

Modelo y Control LQR de una aeronave de cuatro rotores
JUAN Mª DÍAZ CANO. 10
2 Capítulo. Sistema de propulsión.
2.1 Introducción.
En este capítulo se realizará el estudio del sistema de propulsión del Quad-Rotor. El Quad-Rotor está formado por cuatro rotores, constituidos por: Figura 2.1.
1. Barra de carbono
2. Sujeción del sistema propulsor al Quad-Rotor.
3. Motor DC.
4. Eje de giro de la hélice.
5. Caja reductora y sujeción de la hélice.
Figura 2.1. Sistema de propulsión.
El sistema de propulsión se puede sustituir por unas expresiones algebraicas que simulan su comportamiento, en cuyo caso compararemos con el sistema de propulsión.
El estudio del sistema propulsor será el que sigue:
• Obtener el modelo matemático de un motor DC.
• Estudiar el comportamiento de motores comerciales para escoger el más adecuado a las necesidades del sistema.
o Motor en vacío.
o Sistema completo.
• Obtener la relación entre la tensión “Vi” aplicada a los motores DC y el empuje “Ui” aplicado al Quad-Rotor.

Modelo y Control LQR de una aeronave de cuatro rotores
JUAN Mª DÍAZ CANO. 11
2.2 Características de los motores DC.
El motor DC que se ha escogido es el del fabricante Portescap 16BL 3C-L [6]. Las características mecánicas y eléctricas se muestran en la tabla 3.
Nombre Descripción Unidad Valor
Parámetros dependientes R Resistencia de fase Ω 0.7 L Inductancia de fase mH 0.03 Kb Back-EMF constant V/1000rpm 0.45 Km Torque constante mNm/A 4.3
Parámetros dinámicos V Tensión de funcionamiento V 12 I Intensidad sin carga A 0.23 ω0 Velocidad sin carga rpm 26300 Imax Máxima stall corriente A 2.2
Máximo stall torque mNm 8.2 Parámetros intrínsecos
J Inercia del rotor Kgm2 10-7 1.1 τm Constante mecánica ms 4.2 τe Constante eléctrica ms 0.04
Tabla 3. Característica del motor “Portescap 16BL 3C-L”.
Con las características del motor se realizarán las simulaciones para estudiar su comportamiento.
2.3 Modelo dinámico de los motores.
El sistema que se va a modelar es el de la figura 2.2, formado por un motor, una reductora y una hélice.
En la tabla 4 se describe la nomenclatura utilizada en este estudio.
Figura 2.2. Modelo del sistema propulsor.

Modelo y Control LQR de una aeronave de cuatro rotores
JUAN Mª DÍAZ CANO. 12
Nombre Descripción Unidad ω1 Velocidad del motor rad/s P1 Potencia de salida del motor W T1 Par de entrada a la reductora Nm ω2 Velocidad de la hélice rad/s P2 Potencia aplicada a la hélice W T2 Par de salida de la reductora Nm Jm Inercia del motor Kgm2 Jp Inercia de la hélice + inercia de la reductora. Kgm2 r Relación de la reductora η Eficiencia de la reductora. 1/100 d Drag coeficiente (arrastre de la hélice). Nms2 Jt Inercia total (motor + reductora + hélice). Kgm2 L Inductancia del rotor H R Resistencia interna del motor Ω Kb Back-EMF constant V/rad/s Km Torque constante Nm/A Kf Damping ratio “viscosidad” Nms τcarga Par de carga aplicada. Nm τelec Par del motor Nm
i Intensidad de la armadura A V Tensión de entrada V
Ecm Energía cinética del motor Ecg+h Energía cinética de la caja reductora y la hélice. τt Constante de tiempo teórica ms τp Constante de tiempo práctica ms τf Constante de tiempo fabricante ms
Tabla 4. Modelo del sistema propulsor
La dinámica de los motores de corriente continua se puede expresar mediante la ecuación 2.1.
( )
( )acfelect
b
KJt
KViRLt
i
arg11
1
1
1
τωτω
ω
−∗−=∂∂
∗−+∗−=∂∂
Donde iK melec ∗=τ ; (2.1)
Un dato a calcular es la inercia total del sistema propulsor “Jt“, que se obtendrá a través de la ecuación de la energía cinética, ecuación 2.2 y la relación de velocidades de la reductora, ecuación 2.3.
hgmT EcEcEc ++= , Siendo 2
21 ω∗= JEc (2.2)
;211
22
1 rr
r ωωω
ωωω
=⇒=⇒= (2.3)

Modelo y Control LQR de una aeronave de cuatro rotores
JUAN Mª DÍAZ CANO. 13
Al sustituir en la ecuación y desarrollar se obtiene la expresión para calcular el valor de Jt, ecuación 2.4.
;
21
21
21
22
212
121
22
21
21
22
21
21
rJ
JJr
JJJ
JJJJJJ
pmtpmt
pmtpmt
+=⇒∗+∗=∗⇒
⇒∗+∗=∗⇒∗+∗=∗
ωωω
ωωωωωω (2.4)
Para completar el modelo necesitamos saber el par aplicado a la salida “τcarga”. Para ello se utilizará la ecuación 2.5, que liga la potencia de entrada a la reductora “P1”, con la de salida, aplicada a la hélice “P2”.
;21 PP =∗η (2.5)
La potencia se relaciona con la velocidad angular y el par aplicado, ecuación 2.6. También se conoce que en una hélice, el par es el producto entre el empuje y la velocidad angular de la hélice, ecuación 2.7.
;; 222111 TPTP ∗=∗= ωω (2.6)
;22222 ωωω ∗== ddT (2.7)
Sustituyendo en la ecuación 2.5 las ecuaciones 2.6, 2.7 y 2.3, se consigue la expresión del par de carga aplicado en función de la velocidad angular de salida, ecuación 2.8.
22arg1
3212
3211 ω
ητωωηωωη
rdTdTrdT ac ==⇒∗=∗∗⇒∗=∗∗ ; (2.8)
Por último, para completar el modelo sólo se necesita sustituir la ecuación 2.8 en la del modelo, ecuación 1.1 y se obtiene el modelo completo de un motor DC.
El modelo tiene como entrada la tensión de alimentación “V” y la salida corresponde a la velocidad angular del rotor “ω2”, ecuación 2.9.
( )
;1
;1
222
2
2
⎟⎟⎠
⎞⎜⎜⎝
⎛−∗∗−∗
∗=
∂∂
∗∗−+∗−=∂∂
ωη
ωω
ω
rdrKiK
Jrt
rKViRLt
i
fmt
b
(2.9)

Modelo y Control LQR de una aeronave de cuatro rotores
JUAN Mª DÍAZ CANO. 14
2.4 Modelo de primer orden del motor DC.
2.4.1 Motor DC, referido a “ω1”.
El modelo completo del motor, ecuación 2.9, es un sistema de segundo orden y se puede aproximar por un sistema de primer orden, como veremos a continuación.
Se convierte la ecuación 2.8 a La Place, obteniendo las ecuaciones 2.10 y 2.11.
( ) ( ) ( ) ( );1 sKsVsIRsIsL b ω∗−+∗−=∗∗ (2.10)
( ) ( ) ( );11 sKsIKssJ fmt ωω ∗−∗=∗∗ (2.11)
Sustituyendo la ecuación 2.10 en la 2.11 y dejándolo en forma de función de transferencia, ( ) ( ) ( )sVssG 1ω= se obtiene la ecuación 2.12.
( )( ) ( ) ;)( 2mbfftt
m
mbft
m
KKRKLKRJsLsJK
KKRLsKsJK
sG++++
=+++
= (2.12)
El valor de Jt varía dependiendo si el estudio es en vacío o en carga. En vacío, la inercia total Jt es Jt = Jm.
El sistema tiene dos polos, P1 y P2, ecuaciones 2.13 y 2.14. Al calcularlos, el polo S2 está muy alejado del origen y se puede despreciar, porque el polo dominante es S1, con el motor sin carga.
24342
21
2222
1 −=−+−+−−
=m
mbtfftttt
J
KLKJLKLRKJRJLKRJS ; (2.13)
2309142
21
2222
2 −=−+−−−−
=m
mbtfftttt
J
KLKJLKLRKJRJLKRJS ; (2.14)
El polo P1 corresponde a la parte mecánica del motor, y el P2 a la parte eléctrica, En este sistema, la parte eléctrica es más rápida que la mecánica, porque P2 >>> P1. Debido a esto, se puede despreciar la parte eléctrica (L = 0) de la ecuación 1.11, obteniendo un sistema de primer orden. La función de transferencia es: ecuación 2.15.
;)(
RJKKRK
s
RJKKKRKRsJ
KsG
t
mbf
tm
mbft
m
++
=++
= (2.15)
La constante de tiempo del sistema de primer orden “τt” es (ecuación 2.16):
;mbf
tt KKRK
RJ+
=τ (2.16)

Modelo y Control LQR de una aeronave de cuatro rotores
JUAN Mª DÍAZ CANO. 15
2.4.2 Motor DC, referido a “ω2” (Sistema propulsor).
Despreciando la parte eléctrica (L = 0) en el modelo completo del motor, ecuación 2.9, queda un sistema de primer orden no lineal (ω2
2), ecuación 2.17.
);()()( 2222
2 trJ
dtRJ
RKKKtv
rRJK
t tt
fbm
t
m ωη
ωω
−+
−=∂∂
(2.17)
Agrupando los términos de la ecuación 2.17 queda:
2
222
2
;;
);()()(
rJdC
RJRKKK
BrRJK
A
tCtBtAvt
tt
fbm
t
m
η
ωωω
=+
==
−−=∂∂
(2.17)
La ecuación 2.17 se linealizará por Taylor.
( ) ( ) ( ) ( )
( ) ( ) ( ) ( );
ˆ;ˆ;ˆ;0,
;..,,
220220220202
0,
202,2
022
2020020
tttvvvvf
SOTvvvffvf
tvf
vwv
∂∂
=∂−∂
=∂∂
=−=−=
+−⎟⎠⎞
⎜⎝⎛∂∂
+−⎟⎟⎠
⎞⎜⎜⎝
⎛∂∂
+≅∂∂
=
ωωωωωωωω
ωωω
ωω
ωω
Calculando los términos de la linealización.
;;020
020
020,
20,
2,2
AvfACBACBf
vw
v
v
=⎟⎠⎞
⎜⎝⎛∂∂
−−=⎯⎯ →⎯=−−=⎟⎟⎠
⎞⎜⎜⎝
⎛∂∂ ωωω
ω
ω
La ecuación 2.18 corresponde al sistema linealizado.
( ) );(ˆ2)(ˆˆ
2202 tCBtvA
tωω
ω+−=
∂∂
(2.18)
La ecuación 2.18 será una buena aproximación, siempre que el punto de trabajo corresponda con el punto de idealización ω20. La ecuación 2.18 se pasa a transformada de la Place y se deja en forma de función de transferencia ( ) ( ) ( )sVssG ˆˆ 2ω= , obteniendo la ecuación 2.19.
( ) ⇒++
=⇒+−=20
22202 2)(ˆ
)(ˆ)(ˆ2)(ˆ)(ˆ
ωω
ωωωCBs
AsVs
sCBsVAss
;2
)(
220
22
rRJdRrRKrKK
s
RrJKsG
t
fmb
tm
ηωηη ++
+
=⇒ (2.19)
En este caso, la inercia del sistema Jt corresponde a la total, motor + reductora + hélice. El polo P1 del sistema se encuentra en P1 = -37,1.

Modelo y Control LQR de una aeronave de cuatro rotores
JUAN Mª DÍAZ CANO. 16
La constante de tiempo del sistema de primer orden “τt” se calcula en la ecuación 2.20.
;2 20
22
2
ωηηη
τdRrRKrKK
rRJ
fmb
tt ++= (2.20)
2.5 Estudio del motor.
Se estudiará el comportamiento del motor a través de simulaciones con Simulink, para obtener la velocidad angular ω y la constante de tiempo τ de forma teórica (modelo primer orden) y por simulaciones.
2.5.1 Motor sin carga (τcarga = 0).
La ecuación 2.1 es la que se implementará en un modelo de simulink con el valor τcarga igual a cero. Hay que tener en cuenta que la inercia total “Jt” corresponde a la del motor “Jm”.
El resultado de la simulación para una entrada V = 12V aparece en la gráfica de la figura 2.3.
0 0.005 0.01 0.015 0.02 0.025 0.03 0.035 0.040
500
1000
1500
2000
2500
3000Funcionamiento del motor en vacio, con V = 12v
Tiempo (s)
Vel
ocid
ad d
e w
1 en
rad/
s
w163% de w1
Figura 2.3. Velocidad angular del motor en vacío.
De la gráfica se obtiene la constante de tiempo del sistema τp = 4.13ms que corresponde al 63% del valor final de la señal “ω1”.
Modelo y Control LQR de una aeronave de cuatro rotores
JUAN Mª DÍAZ CANO. 17
La velocidad en vacío del motor es de ω1 = 2785rad/s = 26595rpm para una tensión de alimentación de 12 voltios.
Para calcular τt se utilizará la ecuación 2.16. Un dato a tener presente es que las constantes Km y Kb suelen ser iguales y hay que expresarlas en Nm/A y V/rad/s, respectivamente, ecuación 2.21.
sradVrpmVK
ANmAmNmK
m
m
//3.4/45.0
/3.4/3.433
3
−−
−
==
== (2.21)
El resultado teórico de la constante de tiempo es τt = 4.2ms. Por último, se compara con los datos suministrados por el fabricante: τf = 4.2ms y una velocidad angular en vacío: ω = 26300rpm.
El modelo implementado en Simulink es correcto, al coincidir los datos obtenidos por simulación con los entregados por el fabricante.
2.5.2 Motor con carga (τcarga ≠ 0).
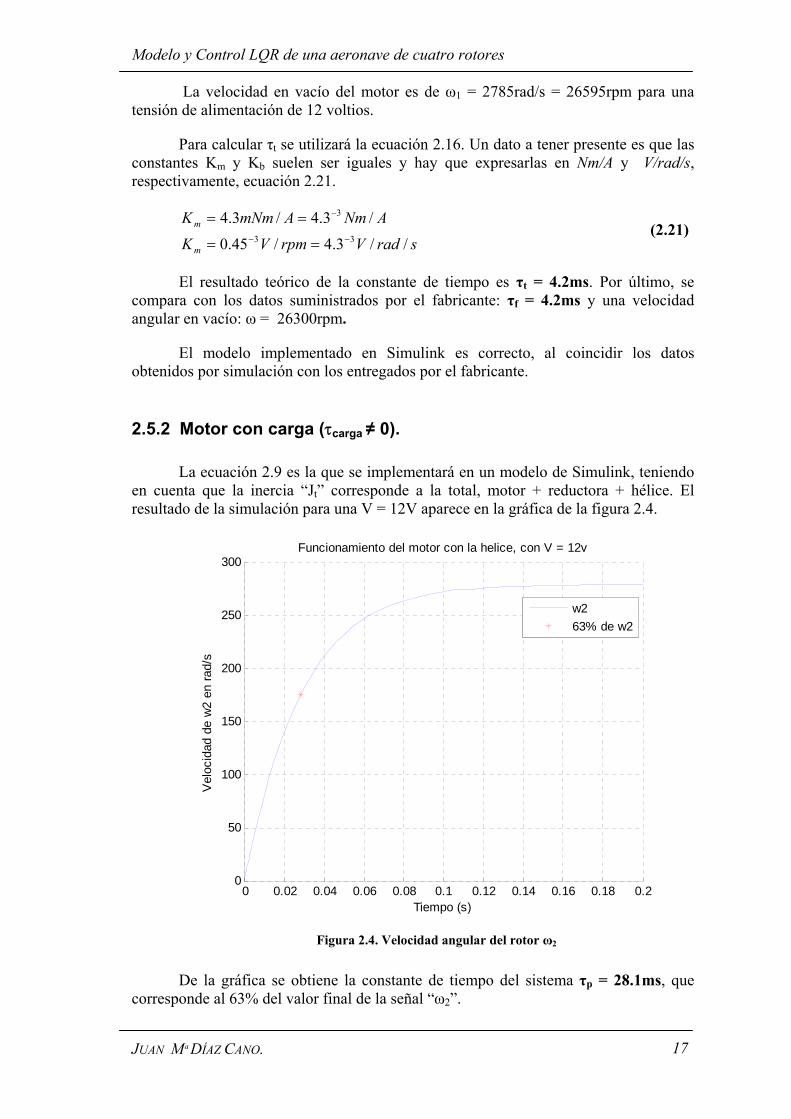
La ecuación 2.9 es la que se implementará en un modelo de Simulink, teniendo en cuenta que la inercia “Jt” corresponde a la total, motor + reductora + hélice. El resultado de la simulación para una V = 12V aparece en la gráfica de la figura 2.4.
0 0.02 0.04 0.06 0.08 0.1 0.12 0.14 0.16 0.18 0.20
50
100
150
200
250
300Funcionamiento del motor con la helice, con V = 12v
Tiempo (s)
Vel
ocid
ad d
e w
2 en
rad/
s
w263% de w2
Figura 2.4. Velocidad angular del rotor ω2
De la gráfica se obtiene la constante de tiempo del sistema τp = 28.1ms, que corresponde al 63% del valor final de la señal “ω2”.

Modelo y Control LQR de una aeronave de cuatro rotores
JUAN Mª DÍAZ CANO. 18
La velocidad en vacío del motor es de ω2 = 278rad/s = 2655pm para una tensión de alimentación de 12 voltios.
Para calcular τt se utilizará la ecuación 2.20, siendo el resultado teórico de la constante de tiempo τt = 26.9ms.
El modelo implementado en Simulink es correcto, al coincidir los datos obtenidos por simulación con los entregados por el fabricante.
2.6 Modelo reducido.
El modelo matemático del Quad-Rotor tiene como entrada del sistema el empuje Ui (N). Existe una relación algebraica entre la velocidad de cada rotor Ωi (velocidad de la hélice) y el empuje Ui, ecuación 2.22. Cuando en el modelo del Quad-Rotor se utilice la ecuación 1.23 en vez de la ecuación de los motores, lo llamaremos modelo reducido.
( )( )( )( )2
423
22
214
21
233
22
242
24
23
22
211
Ω+Ω−Ω+Ω−=
Ω−Ω=
Ω−Ω=
Ω+Ω+Ω+Ω=
dU
lbU
lbU
bU
(2.22)
A partir de las ecuaciones 2.22, se obtiene el empuje máximo y mínimo que puede producir cada rotor.
Los parámetros son: b = 3.13-5 Ns2, d = 7.5-7Nms2 y Ωmax = 278rad/s, que corresponde a la máxima velocidad que puede girar la hélice. Estos valores se sustituyen en la ecuación 2.22 y se obtiene los valores máximos y mínimos de Ui, ecuación 2.23.
( ) [ ]( ) [ ]( ) [ ]( ) [ ] 11.011.01,12
57.057.01,1
57.057.01,1
67.901,04
42max
24
23
22
214
32max
21
233
22max
22
242
12max
24
23
22
211
<≤−⇒−Ω=Ω+Ω−Ω+Ω−=
<≤−⇒−Ω=Ω−Ω=
<≤−⇒−Ω=Ω−Ω=
<≤⇒Ω=Ω+Ω+Ω+Ω=
UddU
UlblbU
UlblbU
UbbU
(2.23)

Modelo y Control LQR de una aeronave de cuatro rotores
JUAN Mª DÍAZ CANO. 19
2.6.1 Representación gráfica, U (N) y V (v).
En estas gráficas se representa la relación entre el empuje Ui y la tensión aplicada a cada motor, figuras 7 – 10.
0 2 4 6 8 10 12
0
1
2
3
4
5
6
7
8
9
10
X: 12Y: 9.719Relación U1 - V
Tensión (V), motores (1, 2, 3, 4)
U1
(N)
Figura 2.5. Empuje producido por los motores Ω1, Ω2, Ω3 y Ω4.
0 2 4 6 8 10 120
0.1
0.2
0.3
0.4
0.5
X: 12Y: 0.571
Relación U2 - V
Tensión (V), motores (2, 4)
U2
(N)
Figura 2.6. Empuje producido por los motores Ω2, y Ω4.

Modelo y Control LQR de una aeronave de cuatro rotores
JUAN Mª DÍAZ CANO. 20
0 2 4 6 8 10 120
0.1
0.2
0.3
0.4
0.5
Relación U3 - V
Tensión (V), motores (1, 3)
U3
(N)
X: 12Y: 0.571
Figura 2.7. Empuje producido por los motores Ω1 y Ω3.
0 2 4 6 8 10 120
0.02
0.04
0.06
0.08
0.1
0.12Relación U4 - V
Tensión (V), motores (1, 2, 3, 4)
U4
(N)
X: 12Y: 0.1164
Figura2.8. Empuje producido por los motores Ω1, Ω2, Ω3 y Ω4.

Modelo y Control LQR de una aeronave de cuatro rotores
JUAN Mª DÍAZ CANO. 21
3 Capítulo. Modelos implementados.
3.1 Introducción.
En este capítulo se describen los modelos de Quad-Rotor que se han implementado en este proyecto, para realizar posteriormente el estudio a cada uno.
El modelo del Quad-Rotor implementado es el del capítulo 1 (ecuaciones 1.1 - 1.16), pero realizaremos dos versiones del modelo completo, entendiendo por modelo completo al Quad-Rotor con el sistema de propulsión (motores DC).
Una primera versión corresponderá al modelo del Quad-Rotor sin incluir la dinámica de los motores a la que llamaremos modelo reducido. La segunda versión, llamado modelo completo, corresponderá al modelo del Quad-Rotor incluyendo la dinámica de los motores.
3.2 Modelo reducido.
En este modelo, como se ha mencionado en el punto anterior, no está incluida la dinámica de los motores. Se sustituye la dinámica de los motores por una relación algebraica entre las fuerzas Ui y las velocidades angulares al cuadrado de los motores, Wì
2. Esta relación está descrita en el capítulo 2, apartado 2.6
El esquema que se ha implementado es el de la figura 3.1.
Figura 3.1. Modelo reducido.
Conocidas las entradas y salidas de las ecuaciones del sistema propulsor,
[ ][ ] ;
;24
23
22
21
4321T
TUUUUU
ΩΩΩΩ=Ω
= (3.1)
y utilizando las matrices auxiliares ‘S’, ‘D’, halladas de las ecuaciones 2.22.
;
000000000000
⎥⎥⎥⎥
⎦
⎤
⎢⎢⎢⎢
⎣
⎡
=
dlb
lbb
S ;
1111010110101111
⎥⎥⎥⎥
⎦
⎤
⎢⎢⎢⎢
⎣
⎡
−−−
−=D (3.2)

Modelo y Control LQR de una aeronave de cuatro rotores
JUAN Mª DÍAZ CANO. 22
Se puede obtener la relación algebraica (3.3) que liga la fuerza de empuje ‘U’ y la velocidad angular al cuadrado’ω2’.
USDDSU ⋅⋅=Ω⇒Ω⋅⋅= −− 11 (3.3)
3.3 Modelo completo.
Este modelo será el más realista con el que se pueda realizar el estudio del control del Quad-Rotor. Tiene incluido la dinámica de los motores del sistema propulsor. Los motores tienen un papel importante en el comportamiento del Quad-Rotor si se hace que la dinámica de éste sea rápida, siendo comparable a la del motor.
El modelo completo tiene como entradas las fuerzas de los motores Ui y como salidas las velocidades angulares al cuadrado de los motores ωì
2.
Figura 3.2. Modelo de la dinámica de los motores.
La figura 3.2 contendrá las ecuaciones diferenciales que describen el modelo de cada sistema propulsor, estas ecuaciones están descritas en el capítulo 2, apartado 2.4.2, y sustituirá en la figura 3.1 al bloque de “Conversión U->W2”.
Antes de concluir con el modelo completo hay que tener en consideración:
• Las ecuaciones de los motores tienen como señales de entrada velocidades angulares, y el modelo del Quad-Rotor tiene como entrada la fuerza de empuje de los motores. Para adecuar estas señales se intercalará un bloque que relacione el empuje Ui, con la velocidad angular Wì. Se escogerá la relación algebraica descrita en el punto 3.2.
• Al modelo del motor hay que incluirle un controlador PI para conseguir que sea lo más rápido posible en alcanzar la referencia de entrada. Este controlador se estudiará en el capítulo 5.
Teniendo en cuenta estas características, se describe en la figura 3.3 el modelo de los motes que se implementará.

Modelo y Control LQR de una aeronave de cuatro rotores
JUAN Mª DÍAZ CANO. 23
Figura 3.3. Modelo completo de la dinámica de los motores.
Por último, sólo queda dibujar la estructura del modelo completo:
Figura 3.4. Modelo completo incluyendo la dinámica de los motores y la del Quad-Rotor.

Modelo y Control LQR de una aeronave de cuatro rotores
JUAN Mª DÍAZ CANO. 24
4 Capítulo. Linealización del modelo.
4.1 Introducción.
En este capítulo se realizará la linealización del modelo no lineal del Quad-Rotor, para posteriormente obtener diferentes puntos de funcionamiento y diseñar varios controladores.
Las ecuaciones linealizadas del modelo no lineal, se obtendrán de forma analítica y mediante Matlab, para poder estudiar el comportamiento en varios puntos de funcionamiento.
Otro punto importante es la obtención del punto de equilibrio del Quad-Rotor, sobre el cual se trabajará.
4.2 Punto de equilibrio.
Antes de realizar la linealización se debe realizar este paso para conocer el punto de funcionamiento del modelo.
El Quad rotor tiene un punto de funcionamiento principal, que corresponde al punto donde el Quad-Rotor está fijo en una coordenada X, Y, Z. Este punto de funcionamiento se da cuando la aceleración en el eje Z y los ángulos del Quad-Rotor sean cero, correspondiendo a un punto de equilibrio.
( ) 0,,, =→ zEquilibrio &&ψφθ
Para obtener este punto de equilibrio sustituimos estos valores en la ecuación 1.3 del capítulo 1, obteniendo la ecuación 4.1:
( ) ( ) ( )
( ) ( ) ;0cos0cos0
0,,,coscos
11
1
1
mgUm
UgU
mg
zUm
gz
∗=⇒=⇒+−=
=⎯→⎯+−= &&&& ψφθθφ
(4.1)
Como veremos en el siguiente punto, este procedimiento se puede realizar mediante Matlab, con la instrucción [x, u, y]=trim(‘modelo’, Xo, Uo, Yo).
4.3 Linealización del modelo.
Como se comentó anteriormente, la dinámica del Quad-Rotor es no lineal y es típico en la mayoría de los sistemas reales.
El trabajar con ecuaciones no lineales es complejo, por esta razón se necesita linealizar las ecuaciones del Quad-Rotor sobre un punto de funcionamiento.

Modelo y Control LQR de una aeronave de cuatro rotores
JUAN Mª DÍAZ CANO. 25
El modelo del Quad-Rotor (ecuaciones 1.1-1.6) está constituido por cuatro entradas y doce estados, ecuación 4.2 y 4.3, que son los encargados de gobernar la dinámica del sistema.
ψψθθφφ &&&
&&&
======
======
121110987
654321
,,,,,
,,,,,
xxxxxx
zxzxyxyxxxxx (4.2)
U1, U2, U3, U4 (4.3)
El modelo del Quad-Rotor original se puede describir en ecuaciones de estados, ecuación 4.4.
( )
( )43211211109876543211212
432112111098765432111
,,,;,,,,,,,,,,,
,,,;,,,,,,,,,,,
UUUUxxxxxxxxxxxxft
x
UUUUxxxxxxxxxxxxftx
=∂∂
=∂∂
M (4.4)
Una herramienta útil, para describir la dinámica aproximada del sistema, son las ecuaciones de estado lineales. La obtención de un modelo lineal a partir de uno no lineal se llama linealización.
La linealización se realiza en torno a un punto de trabajo, donde los valores nominales satisfacen al modelo no lineal. El punto de trabajo o punto de equilibrio donde se realizará la linealización corresponde a Ps.
( )Tssssssssssssssss UUUUxxxxxxxxxxxxPs 4321121110987654321 ,,,;,,,,,,,,,,,= (4.5)
Aplicando el teorema de Taylor en el punto Ps, sobre las ecuaciones de estado del sistema, ecuación 4.4, se tiene:
( ) ( ) ( ) ( )
( )
( ) ( ) ( ) ( )
( ) SOTuuUf
uuUfxx
xfxx
xfPsff
SOTuuUf
uuUfxx
xfxx
xfPsff
S
Ps
S
Ps
S
Ps
S
Ps
S
Ps
S
Ps
S
Ps
S
Ps
....
..
....
..
444
12
111
121212
12
1211
1
121212
444
1
111
11212
12
111
1
111
+−⎟⎟⎠
⎞⎜⎜⎝
⎛∂∂
++
−⎟⎟⎠
⎞⎜⎜⎝
⎛∂∂
+−⎟⎟⎠
⎞⎜⎜⎝
⎛∂∂
++−⎟⎟⎠
⎞⎜⎜⎝
⎛∂∂
+≈
+−⎟⎟⎠
⎞⎜⎜⎝
⎛∂∂
++
−⎟⎟⎠
⎞⎜⎜⎝
⎛∂∂
+−⎟⎟⎠
⎞⎜⎜⎝
⎛∂∂
++−⎟⎟⎠
⎞⎜⎜⎝
⎛∂∂
+≈
M (4.6)
Pudiendo reescribir el sistema de ecuaciones original 4.4 como:

Modelo y Control LQR de una aeronave de cuatro rotores
JUAN Mª DÍAZ CANO. 26
( ) ( )
( ) ( )41121112121212
4112111111
,,;,,
,,;,,
UUxxft
xt
xxt
x
UUxxftx
txx
tx
s
s
LLLL
M
LLLL
=∂∂
⇒∂−∂
=∂∂
=∂∂
⇒∂−∂
=∂∂
(4.7)
Sustituyendo en las ecuaciones 4.7 todas las funciones 121 ff L , despreciando los términos de orden superior y sabiendo que en el punto de equilibrio ( ) ( ) 00 121 == PsfPsf L , tenemos:
124
121
1
1212
12
121
1
1212
124
11
1
112
12
11
1
11
....
....
uUf
uUf
xxf
xxf
tx
uUf
uUf
xxf
xxf
tx
PsPsPsPs
PsPsPsPs
⎟⎟⎠
⎞⎜⎜⎝
⎛∂∂
++⎟⎟⎠
⎞⎜⎜⎝
⎛∂∂
+⎟⎟⎠
⎞⎜⎜⎝
⎛∂∂
++⎟⎟⎠
⎞⎜⎜⎝
⎛∂∂
=∂∂
⎟⎟⎠
⎞⎜⎜⎝
⎛∂∂
++⎟⎟⎠
⎞⎜⎜⎝
⎛∂∂
+⎟⎟⎠
⎞⎜⎜⎝
⎛∂∂
++⎟⎟⎠
⎞⎜⎜⎝
⎛∂∂
=∂∂
M (4.8)
El anterior sistema de ecuaciones se puede escribir de forma matricial de la siguiente forma:
uBxAtx
+=∂∂
(4.8)
Donde,
;
13
13
1
13
13
1
1
1
⎥⎥⎥⎥⎥⎥⎥
⎦
⎤
⎢⎢⎢⎢⎢⎢⎢
⎣
⎡
⎟⎟⎠
⎞⎜⎜⎝
⎛∂∂
⎟⎟⎠
⎞⎜⎜⎝
⎛∂∂
⎟⎟⎠
⎞⎜⎜⎝
⎛∂∂
⎟⎟⎠
⎞⎜⎜⎝
⎛∂∂
=
ss
ss
EE
EE
xf
xf
xf
xf
A
LL
MLLM
MLLM
LL
;
4
13
1
13
4
1
1
1
⎥⎥⎥⎥⎥⎥⎥
⎦
⎤
⎢⎢⎢⎢⎢⎢⎢
⎣
⎡
⎟⎟⎠
⎞⎜⎜⎝
⎛∂∂
⎟⎟⎠
⎞⎜⎜⎝
⎛∂∂
⎟⎟⎠
⎞⎜⎜⎝
⎛∂∂
⎟⎟⎠
⎞⎜⎜⎝
⎛∂∂
=
ss
ss
EE
EE
Uf
Uf
Uf
Uf
B
LL
MLLM
MLLM
LL
(4.9)
La ecuación 4.8 representa la dinámica del sistema en variables ‘x’ de estados y entradas ‘u’, pero también se puede obtener con el mismo procedimiento, anteriormente descrito, el vector de salidas ‘y’ en función de las variables de estados ‘x’ y entradas ‘u’,
( )uxgy ,= (4.10)
Se escoge un punto de funcionamiento denotado por ‘Ps’, correspondiendo al punto donde se linealizará el sistema.
( )Tss uxPs ,= (4.11)

Modelo y Control LQR de una aeronave de cuatro rotores
JUAN Mª DÍAZ CANO. 27
Aplicando el teorema de Taylor en el punto Ps, sobre las ecuaciones de estado del sistema, ecuación 4.4, se obtiene:
( ) ( ) ( ) ( )
( )
( ) ( ) ( ) ( )
( ) SOTuuUg
uuUgxx
xgxx
xgPsgg
SOTuuUg
uuUg
xxxg
xxxg
Psgg
S
Ps
S
Ps
S
Ps
S
Ps
S
Ps
S
Ps
S
Ps
S
Ps
....
..
....
..
444
12
111
121212
12
1211
1
121212
444
1
111
11212
12
111
1
111
+−⎟⎟⎠
⎞⎜⎜⎝
⎛∂∂
++
−⎟⎟⎠
⎞⎜⎜⎝
⎛∂∂
+−⎟⎟⎠
⎞⎜⎜⎝
⎛∂∂
++−⎟⎟⎠
⎞⎜⎜⎝
⎛∂∂
+≈
+−⎟⎟⎠
⎞⎜⎜⎝
⎛∂∂
++
−⎟⎟⎠
⎞⎜⎜⎝
⎛∂∂
+−⎟⎟⎠
⎞⎜⎜⎝
⎛∂∂
++−⎟⎟⎠
⎞⎜⎜⎝
⎛∂∂
+≈
M (4.12)
De la ecuación 4.11 sabemos que,
( ) ( )PsgyPsgy 121211 == L (4.13)
Pudiendo reescribir el sistema de ecuaciones 3.12 como (despreciando términos de orden superior):
124
121
1
1212
12
121
1
121212
124
11
1
112
12
11
1
111
....
....
uUg
uUg
xxg
xxg
yg
uUg
uUg
xxg
xxg
yg
PsPsPsPs
S
PsPsPsPs
S
⎟⎟⎠
⎞⎜⎜⎝
⎛∂∂
++⎟⎟⎠
⎞⎜⎜⎝
⎛∂∂
+⎟⎟⎠
⎞⎜⎜⎝
⎛∂∂
++⎟⎟⎠
⎞⎜⎜⎝
⎛∂∂
+=
⎟⎟⎠
⎞⎜⎜⎝
⎛∂∂
++⎟⎟⎠
⎞⎜⎜⎝
⎛∂∂
+⎟⎟⎠
⎞⎜⎜⎝
⎛∂∂
++⎟⎟⎠
⎞⎜⎜⎝
⎛∂∂
+=
M (4.14)
Sustituyendo las ecuaciones 4.14 en las ecuaciones 4.10 y escribiendo el sistema en forma matricial, resulta:
uDxCty
+=∂∂
(4.15)
Donde,
;
12
12
1
12
12
1
1
1
⎥⎥⎥⎥⎥⎥⎥
⎦
⎤
⎢⎢⎢⎢⎢⎢⎢
⎣
⎡
⎟⎟⎠
⎞⎜⎜⎝
⎛∂∂
⎟⎟⎠
⎞⎜⎜⎝
⎛∂∂
⎟⎟⎠
⎞⎜⎜⎝
⎛∂∂
⎟⎟⎠
⎞⎜⎜⎝
⎛∂∂
=
ss
ss
EE
EE
xg
xg
xg
xg
C
LL
MLLM
MLLM
LL
;
4
12
1
12
4
1
1
1
⎥⎥⎥⎥⎥⎥⎥
⎦
⎤
⎢⎢⎢⎢⎢⎢⎢
⎣
⎡
⎟⎟⎠
⎞⎜⎜⎝
⎛∂∂
⎟⎟⎠
⎞⎜⎜⎝
⎛∂∂
⎟⎟⎠
⎞⎜⎜⎝
⎛∂∂
⎟⎟⎠
⎞⎜⎜⎝
⎛∂∂
=
ss
ss
EE
EE
Ug
Ug
Ug
Ug
D
LL
MLLM
MLLM
LL
(4.16)

Modelo y Control LQR de una aeronave de cuatro rotores
JUAN Mª DÍAZ CANO. 28
El sistema linealizado queda:
uDxCy
uBxAtx
+=
+=∂∂
(4.17)
Las matrices obtenidas son:
MATRIZ “A”
;
0000000000100000000000
0000000000001000000000
0000000000000010000000000000000000000100000000000000000000001000000000000000000000010
1716
1413
1110
987
654
321
⎥⎥⎥⎥⎥⎥⎥⎥⎥⎥⎥⎥⎥⎥⎥⎥⎥
⎦
⎤
⎢⎢⎢⎢⎢⎢⎢⎢⎢⎢⎢⎢⎢⎢⎢⎢⎢
⎣
⎡
=
AA
AA
AA
AAA
AAA
AAA
A
( ) ( ) ( ) ( ) ( ) ;sincossinsinsin11 U
mA ⎟
⎠⎞
⎜⎝⎛ +−
=ψφψθφ ( ) ( ) ( )
12coscoscos U
mA ⎟
⎠⎞
⎜⎝⎛=
ψθφ
( ) ( ) ( ) ( ) ( )13
cossinsinsincos Um
A ⎟⎠⎞
⎜⎝⎛ +−
=ψφψθφ ; ( ) ( ) ( )
15sincoscos U
mA ⎟
⎠⎞
⎜⎝⎛=
ψθφ
( ) ( ) ( ) ( ) ( )
14coscossinsinsin U
mA ⎟
⎠⎞
⎜⎝⎛ −−
=ψφψθφ ; ( ) ( )
17cossin U
mA ⎟
⎠⎞
⎜⎝⎛ −=
θφ
( ) ( ) ( ) ( ) ( )
16sinsincossincos U
mA ⎟
⎠⎞
⎜⎝⎛ +
=ψφψθφ ; ( ) ( )
18sincos U
mA ⎟
⎠⎞
⎜⎝⎛ −=
θφ
09 =A ; ( )
x
r
x
zy
IJ
III
AΩ
−−
=ψ&
10 ; ( )
x
zy
III
A−
=θ&
11 ; ( )
y
r
y
xz
IJ
III
AΩ
+−
=ψ&
13 ;
( )y
xz
III
A−
=φ&
14 ; ( )
z
yx
III
A−
=θ&
16 ( )
z
yx
III
A−
=φ&
17

Modelo y Control LQR de una aeronave de cuatro rotores
JUAN Mª DÍAZ CANO. 29
MATRIZ “B”
( ) ( ) ( ) ( ) ( )
( ) ( ) ( ) ( ) ( )
( ) ( )
;
10000000
01000000
00100000
000coscos0000
000cossinsinsincos0000
000sinsincossincos0000
⎥⎥⎥⎥⎥⎥⎥⎥⎥⎥⎥⎥⎥⎥⎥⎥⎥⎥⎥⎥
⎦
⎤
⎢⎢⎢⎢⎢⎢⎢⎢⎢⎢⎢⎢⎢⎢⎢⎢⎢⎢⎢⎢
⎣
⎡
−
+
=
z
y
x
I
I
I
m
m
m
B
θφ
ψφψθφ
ψφψθφ
MATRIZ “C” MATRIZ “D”
;
100000000000010000000000001000000000000100000000000010000000000001000000000000100000000000010000000000001000000000000100000000000010000000000001
⎥⎥⎥⎥⎥⎥⎥⎥⎥⎥⎥⎥⎥⎥⎥⎥⎥
⎦
⎤
⎢⎢⎢⎢⎢⎢⎢⎢⎢⎢⎢⎢⎢⎢⎢⎢⎢
⎣
⎡
=C ;
000000000000000000000000000000000000000000000000
⎥⎥⎥⎥⎥⎥⎥⎥⎥⎥⎥⎥⎥⎥⎥⎥⎥
⎦
⎤
⎢⎢⎢⎢⎢⎢⎢⎢⎢⎢⎢⎢⎢⎢⎢⎢⎢
⎣
⎡
=D

Modelo y Control LQR de una aeronave de cuatro rotores
JUAN Mª DÍAZ CANO. 30
4.3.1 Linealización del modelo usando Matlab.
En el punto anterior se ha mostrado como linealizar un modelo no lineal, obteniendo sus matrices de forma analítica. Este procedimiento se puede realizar con Matlab, obteniendo los mismos resultados. Para ello se utiliza la instrucción [A, B, C, D] = linmod(‘modelo’, Xs, Us).
‘modelo’: Modelo no lineal implementado en Simulink.
Xs: Valores de los estados en el punto de equilibrio.
Us: Valores de las entradas en el punto de equilibrio.
4.3.2 Valores de A, B, C, D, de forma analítica y usando Matlab.
Al sustituir las constantes del Quad-Rotor (Tabla 2) y el punto de equilibrio en las matrices del modelo (4.17), se obtienen los siguientes resultados, de forma analítica y mediante Matlab.
;
000000000000100000000000000000000000001000000000000000000000000010000000000000000000000000100000000005.110000000000000010000005.1100000000000000000010
⎥⎥⎥⎥⎥⎥⎥⎥⎥⎥⎥⎥⎥⎥⎥⎥⎥
⎦
⎤
⎢⎢⎢⎢⎢⎢⎢⎢⎢⎢⎢⎢⎢⎢⎢⎢⎢
⎣
⎡
−
=A ;
2.89000000006.160000000005.1600000000092.100000000000000000000
⎥⎥⎥⎥⎥⎥⎥⎥⎥⎥⎥⎥⎥⎥⎥⎥⎥
⎦
⎤
⎢⎢⎢⎢⎢⎢⎢⎢⎢⎢⎢⎢⎢⎢⎢⎢⎢
⎣
⎡
=B
;
100000000000010000000000001000000000000100000000000010000000000001000000000000100000000000010000000000001000000000000100000000000010000000000001
⎥⎥⎥⎥⎥⎥⎥⎥⎥⎥⎥⎥⎥⎥⎥⎥⎥
⎦
⎤
⎢⎢⎢⎢⎢⎢⎢⎢⎢⎢⎢⎢⎢⎢⎢⎢⎢
⎣
⎡
=C
;
000000000000000000000000000000000000000000000000
⎥⎥⎥⎥⎥⎥⎥⎥⎥⎥⎥⎥⎥⎥⎥⎥⎥
⎦
⎤
⎢⎢⎢⎢⎢⎢⎢⎢⎢⎢⎢⎢⎢⎢⎢⎢⎢
⎣
⎡
=D (4.18)

Modelo y Control LQR de una aeronave de cuatro rotores
JUAN Mª DÍAZ CANO. 31
5 Capítulo. Estructuras de control.
5.1 Introducción.
En este capítulo se estudiará la estructura de control LQR, que será la encargada de controlar el sistema. El control LQR se utiliza en sistemas MIMO (control multivariable), por lo que se puede aplicar en este estudio.
El Quad-Rotor es un sistema cuya ecuaciones diferenciales no varían en el punto de trabajo escogido, por lo que no se utilizara un LQR con control adaptativo (gain-scheduling).
5.2 Controlador.
Como estudiamos en el capítulo anterior, se ha tomado la decisión de realizar un diseño lineal de controlador, es decir, se va a emplear el modelo lineal del Quad-Rotor en el punto de funcionamiento para calcular el controlador. Debido a esto, el control será lineal, pero no se puede olvidar que el modelo se implementará sobre el sistema no lineal.
Al utilizar un control lineal sobre un modelo no lineal, el controlador debe ser robusto, ya que existen parámetros que pueden variar, como el peso. Otra característica importante del controlador es el rechazo a perturbaciones, es el caso de rachas de viento o cambios de densidad en el aire.
Resumiendo, las principales características del controlador deben ser:
• Lineal.
• Multivariable.
• Robusto.
• Rechazo de perturbaciones.
• Efecto integral.
Teniendo en consideración las características descritas anteriormente, se ha optado por estudiar el controlador LQR y el LQR con efecto integral. El efecto integral se aplicará a las variables controlables. Con este controlador aseguraremos las características anteriores y obtendremos buenos resultados como veremos en las simulaciones posteriores.

Modelo y Control LQR de una aeronave de cuatro rotores
JUAN Mª DÍAZ CANO. 32
5.3 Control LQR.
Como se mencionó anteriormente, se realizará el estudio del control LQR para el modelo del Quad-Rotor lineal, pero se implementará en los dos modelos posibles:
a) Modelo Reducido: Corresponde al modelo del Quad-Rotor sin incluir la dinámica de los motores del sistema de propulsión.
b) Modelo Completo: Corresponde al modelo del Quad-Rotor incluyendo la dinámica de los motores del sistema de propulsión.
Esta es una técnica de control moderna denominada control óptimo, que proporciona una solución de compromiso entre el error y la señal de control a aplicar, figura 5.1.
Figura 5.1. Esquema del control LQR.
Los estados ‘X’, ‘Y’, ‘Z’, ‘Ψ’, serán los controlables, siendo las entradas de referencia: ‘Xr’, ‘Yr’, ‘Zr’, ‘Ψr’. De esta forma se obtienen nuevos estados:
rxxx −= 11 , ryxx −= 33ˆ , rzxx −= 55ˆ , rxx ψ−= 1111ˆ .
El problema de control óptimo se formula de la siguiente manera:
• Sistema dinámico descrito por una ecuación diferencial de la forma:
( )uxfx ,=&
• Condiciones iniciales ( ))(),0( Txx .
• Criterio de funcionamiento de la forma:
( ) ( )( )dtTTxSdttuxLJT
∫ +=0
,,,
El sistema de control busca una señal de control u(t) que minimice J entre todas las soluciones. A este tipo de control se le conoce como regulador lineal cuadrático o problema LQR (Linear Quadratic Regulator), que consiste en minimizar una función cuadrática y mantenerla lo más próximo al origen (x = 0).

Modelo y Control LQR de una aeronave de cuatro rotores
JUAN Mª DÍAZ CANO. 33
Las ventajas de usar este control radican:
• Obtiene una ley de control en bucle cerrado.
• Coste computacional bajo.
• Control robusto, al tener un margen de fase grande.
Para calcular el control LQR supondremos que tenemos el sistema en variables de estados y que los estados son medibles (‘x’ son los estados y ‘u’ son las entradas del sistema).
DuCxyBuAxx
+=+=&
(5.1)
El objetivo del control es llevar los estados ‘x’ a cero, mientras minimiza el índice cuadrático.
( ) ( ) ( ) ( )( )dttRututQxtxJT
TT∫ +=0
(5.2)
Donde Q es una matriz semidefinida positiva y R es una matriz definida positiva, pero ambas son simétricas. En la mayoría de los casos Q y R suelen ser diagonales y son escogidas por el diseñador para alcanzar una solución de compromiso entre la rapidez de convergencia (x = 0) y las señales de control a aplicar.
La ley de control utilizada es:
Kxu −= (5.3)
Donde,
PBRK T1−= (5.4)
y P es la solución de la ecuación de Riccati que depende del tiempo P(t), quedando definida la ley de control.
QPBPBRPAAPPAP TT +−+++ −1& (5.5)
Estos son los cálculos teóricos que hay detrás del control LQR, pero en este proyecto se usa la instrucción de Matlab ‘[K] = lqr(A,B,Q,R)’ para calcular el LQR, ya que se obtiene la matriz de ganancias ‘K’ de la ley de control.

Modelo y Control LQR de una aeronave de cuatro rotores
JUAN Mª DÍAZ CANO. 34
5.4 Cálculo del control LQR con Matlab.
Se ha creado en Matlab una función “quad_LQR.m” para automatizar el cálculo del LQR. Esta función se puede utilizar con un modelo dibujado en Simulink o utilizando las matrices analíticas descritas en el capítulo 3. De esta forma se obtiene la matriz de ganancias K del LQR en el punto de equilibrio, utilizando como matrices de ponderación Q y R, que son las matrices identidad.
;
01.1100000000000004.168.600000037.11000004.168.60037.110000000043.110000
⎥⎥⎥⎥
⎦
⎤
⎢⎢⎢⎢
⎣
⎡−−
=K (5.6)
5.5 Controlador PI del sistema de propulsión.
El sistema de propulsión, formado por el motor DC, debe ser controlado. Para ello, se escoge la estructura clásica de un controlador PI, figura 5.2. Este controlador corresponde al lazo de control interno, por lo que deberá ser lo más rápido posible para que no afecte a la dinámica del Quad-Rotor.
Figura 5.2. Estructura del controlador PI.
Para realizar el diseño se utilizará la ecuación 1.19, función de transferencia de primer orden del motor DC. Simplificando la ecuación se obtiene:
( ) ( )( ) ;2
RJKKRK
s
RrJKKrKRrKRsrJ
KsVs
sG
t
mbf
tm
mbft
m
++
=++
==ω
(5.7)
El controlador PI tiene la siguiente estructura:
s
KK
sK
sC p
ip ⎟
⎟⎠
⎞⎜⎜⎝
⎛+
=)( ; (5.8)
Donde ‘Ki‘es la ganancia integral, y ‘Kp‘es la ganancia proporcional.
A la ecuación resultante de la cadena directa ‘C(s)G(s)’ se le realizará una cancelación del cero del controlador con el polo del sistema, del cual se obtiene la primera condición para el diseño del controlador PI.

Modelo y Control LQR de una aeronave de cuatro rotores
JUAN Mª DÍAZ CANO. 35
;2
)()(
220
22 RsrJKK
rRJdRrRKrKK
ss
KK
sRrJ
KK
sGsCt
pm
t
fmb
p
i
t
pm
=
⎟⎟⎠
⎞⎜⎜⎝
⎛ +++
⎟⎟⎠
⎞⎜⎜⎝
⎛+
=
ηωηη
(5.9)
1ª condición (Cancelación de cero y polo):
;22
220
22
220
22
pt
fmbi
p
i
t
fmb KrRJ
dRrRKrKKK
KK
rRJdRrRKrKK
ηωηη
ηωηη ++
=⇒=++
(5.10)
Del sistema en bucle cerrado ‘BC’ se calcula la función de transferencia ‘FTBC’, para poder obtener la segunda y última condición de diseño.
( )( )
( ) ( )( ) ( )
RrJKK
s
KKKKRsrJ
KK
RsrJKK
RsrJKK
sGsKsGsK
ssFT
t
pm
pm
pmt
pm
t
pm
t
pm
rBC
+=
+=
+=
+==
112
2
ωω ; (5.11)
2ª condición (Se impone el Tau):
;τ
τm
tp
pm
t
KRrJ
KKKRrJ
=⇒= (5.12)
Una vez obtenidas las dos condiciones sólo hay que proporcionar la constante de tiempo “τ” deseada, para obtener Kp y a partir de ahí se obtiene Ki.
Para que la dinámica de los motores no afecte al comportamiento del Quad-Rotor hay que hacer que el controlador PI sea lo más rápido posible, para ello la señal de control “v” se tendrá que saturar. Como el control posee término integral, aparece el efecto ‘Wind-Up’, que es debido a que el integrador sigue integrando la señal y aparece una sobreoscilación. Para evitar esto, se diseñará un sistema ‘Antiwind-Up’.
5.5.1 Simulación del PI sin Antiwind-Up
En esta sección se simulará el sistema de la figura 5.2, implementando un controlador PI sin aplicarle el ‘Antiwind-Up’. Del sistema G(s) (sistema propulsor) se conoce su constante de tiempo ‘τ = 0.032seg’. En este caso se impondrá que Tau sea diez veces menor, ‘τ = 0.003seg’, de esta forma se consigue que el sistema sea lo más rápido posible y vaya saturado.
Imponiendo Tau en la ecuación 5.12 se calcula el valor de la constante proporcional ‘Kp’ del controlador PI y con este valor sustituyendo en la ecuación 5.10 se calcula la constante integral ‘Ki’.
2ª condición: ;423.0==τm
tp K
RrJK (5.13)

Modelo y Control LQR de una aeronave de cuatro rotores
JUAN Mª DÍAZ CANO. 36
1ª condición: ;71.152
220
22
=++
= pt
fmbi K
rRJdRrRKrKK
Kη
ωηη (5.14)
Con los parámetros hallados en las ecuaciones 5.13 y 5.14, se realizará la simulación del sistema, colocando como señales de referencia tres valores, Wref = 180, 210 y 270 rad/s. En los resultados obtenidos se aprecia el efecto ‘Wind-Up’ en las referencias de 180 y 210 rad/s.
0 0.05 0.1 0.15 0.2 0.25 0.3 0.35 0.40
50
100
150
200
250
300Control "PI", con tau = 0.003s
Tiempo (s)
Vel
ocid
ad d
e w
2 en
rad/
s
Wref = 278rad/sWref = 210rad/sWref = 180rad/s
Figura 5.3. Simulación controlador PI sin Antiwind-Up.
Figura 5.4. Señal de control ‘V’ control PI sin Antiwind-Up.

Modelo y Control LQR de una aeronave de cuatro rotores
JUAN Mª DÍAZ CANO. 37
5.6 Control PI con Antiwind-Up.
El sistema Antiwind-up consiste en sustituir el controlador PI por una nueva estructura, figura 5.5, donde será necesario una saturación para la señal de control de los motores, correspondiendo la señal de control a la tensión de alimentación que en este caso son doce voltios.
Figura 5.5. Estructura del controlador PI con Antiwind-Up.
Los dos únicos datos a calcular son la ganancia estática ‘K∞‘, que corresponde al valor K(s) cuando “s→ ∞”, y el valor de ‘K(s)-1 - K∞
-1‘. ‘K’ corresponde a la función de transferencia ‘C’ del controlador PI.
( );)()( p
pspip KKs
sKs
KKsKsKsC =⇒=⎯⎯→⎯=
+== ∞
∞→ (5.15)
( ) ( );)(1)(2
1111
pi
pi
ppip KKsKK
KsKKKKsK
sKsK+
−=−⇒−
+=− −
∞−−
∞− (5.16)
5.6.1 Simulación del PI con Antiwind-Up
En esta sección se simulará el sistema de la figura 5.2, implementando un controlador PI con Antiwind-Up, figura 5.5. Para ello se utilizará el controlador PI diseñado en el apartado anterior, ecuaciones 5.13 y 5.14.
Con los valores de la constante proporcional ‘Kp’ y la constante integral ‘Ki’ se pasa a calcular el valor de la ganancia estática ‘K∞‘ y el valor de ‘K(s)-1 - K∞
-1‘ obteniendo:
;423.0==∞ pKK (5.17)
( ) ( ) ;13.3771.87)(
211
+−
=+
−=− −
∞−
sKKsKK
KsKpi
pi (5.18)
Con los parámetros 5.17 y 5.18 se realizará la simulación del sistema, colocando como señales de referencia tres valores, Wref = 180, 210 y 270 rad/s. En los resultados

Modelo y Control LQR de una aeronave de cuatro rotores
JUAN Mª DÍAZ CANO. 38
obtenidos no existe el efecto ‘Wind-Up’, ya que lo ha suprimido el controlador diseñado.
0 0.05 0.1 0.15 0.2 0.25 0.3 0.35 0.40
50
100
150
200
250
300
Tiempo (s)
Vel
ocid
ad d
e w
2 en
rad/
s
Control "PI con Antiwind-up", con tau = 0.003s
Wref = 278rad/sWref = 210rad/sWref = 180rad/s
Figura 5.6. Simulación controlador PI sin Antiwind-Up.
0 0.05 0.1 0.15 0.2 0.25 0.3 0.35 0.47
8
9
10
11
12
Tiempo (s)
Tens
ión
aplic
ada
en v
oltio
s
Señal de control "V", 0v < V < 12v
Wref = 278rad/sWref = 210rad/sWref = 180rad/s
Figura 5.7. Simulación controlador PI sin Antiwind-Up.
Este será el controlador que se implementará en el modelo de Simulink, debido a que soluciona los problemas anteriormente mencionados.

Modelo y Control LQR de una aeronave de cuatro rotores
JUAN Mª DÍAZ CANO. 39
5.7 Control LQR con efecto integral.
El controlador LQR estudiado en el punto 4.3 tiene el inconveniente de no ser robusto ante perturbaciones. En el caso de existir perturbaciones mantenidas que afecte al Quad-Rotor, el controlador LQR no sería capaz de estar en la posición de equilibrio manteniendo los errores de las referencias a cero. Para solucionar este problema y conseguir un controlador que rechace perturbaciones, se necesita añadir al controlador LQR un efecto integral que afecte al error de las variables del modelo.
El efecto integral consiste en integrar el error de los estados afectados por las perturbaciones. Mirando las ecuaciones del modelo del Quad-Rotor 1.1 - 1.6, se escogen las variables ‘X’, ‘Y’, ‘z’ y el ángulo‘Ψ’, como variables a las que se aplicarán el efecto integral. A los ángulos ‘φ’, ‘θ’, no se aplica el efecto integral porque, al ser un sistema subactuado, el efecto integral que se aplique a las variables ‘X’, ‘Y’ le afectan de forma indirecta a estos ángulos.
El modelo del Quad-Rotor está formado por doce estados, pero al incluirle el efecto integral en cuatro estados “x1, x3, x5, x11”, el sistema final estará formado por dieciséis estados. A continuación se describe la nueva estructura de control figura 5.8.
Figura 5.8. Estructura del LQR con efecto integral.
El error de la posición se define como sigue:
r
r
r
r
xxzxxyxxxxx
ψ−=−=−=−=
1111
55
33
11
ˆˆˆˆ
Y los nuevos estados serán:
11161116
515515
314314
113113
ˆˆ
ˆˆ
ˆˆ
ˆˆ
xxxx
xxxx
xxxx
xxxx
=⇒=
=⇒=
=⇒=
=⇒=
∫∫∫∫
&
&
&
&

Modelo y Control LQR de una aeronave de cuatro rotores
JUAN Mª DÍAZ CANO. 40
Una vez definidos los nuevos estados, se pasa a describir las nuevas matrices; A, B, C, D; que gobiernan la dinámica del Quad-Rotor.
;
0000010000000000000000000001000000000000000001000000000000000001000000000000000000000000000000000000100000000000000000000000000000000010000000000000000010000000000000000000000000000000001000000000000008.9000000000000000000100000000008.9000000000000000000000010
⎥⎥⎥⎥⎥⎥⎥⎥⎥⎥⎥⎥⎥⎥⎥⎥⎥⎥⎥⎥⎥⎥⎥
⎦
⎤
⎢⎢⎢⎢⎢⎢⎢⎢⎢⎢⎢⎢⎢⎢⎢⎢⎢⎢⎢⎢⎢⎢⎢
⎣
⎡
−
=A
;
0000000000000000
2.89000000006.160000000005.1600000000092.100000000000000000000
⎥⎥⎥⎥⎥⎥⎥⎥⎥⎥⎥⎥⎥⎥⎥⎥⎥⎥⎥⎥⎥⎥⎥
⎦
⎤
⎢⎢⎢⎢⎢⎢⎢⎢⎢⎢⎢⎢⎢⎢⎢⎢⎢⎢⎢⎢⎢⎢⎢
⎣
⎡
=B
;
1000000000000000010000000000000000100000000000000001000000000000000010000000000000000100000000000000001000000000000000010000000000000000100000000000000001000000000000000010000000000000000100000000000000001000000000000000010000000000000000100000000000000001
⎥⎥⎥⎥⎥⎥⎥⎥⎥⎥⎥⎥⎥⎥⎥⎥⎥⎥⎥⎥⎥⎥⎥
⎦
⎤
⎢⎢⎢⎢⎢⎢⎢⎢⎢⎢⎢⎢⎢⎢⎢⎢⎢⎢⎢⎢⎢⎢⎢
⎣
⎡
=C
;
0000000000000000000000000000000000000000000000000000000000000000
⎥⎥⎥⎥⎥⎥⎥⎥⎥⎥⎥⎥⎥⎥⎥⎥⎥⎥⎥⎥⎥⎥⎥
⎦
⎤
⎢⎢⎢⎢⎢⎢⎢⎢⎢⎢⎢⎢⎢⎢⎢⎢⎢⎢⎢⎢⎢⎢⎢
⎣
⎡
=D
5.8 Control LQR selectivo.
Los controladores LQR que se han estudiado hasta ahora tienen el inconveniente de estar sintonizados para una amplitud de señal de entrada determinada. El comportamiento del control es bueno mientras la amplitud de la señal de entrada sea próxima a la que se sintonizó el LQR. Para conseguir que el controlador se comporte mejor en un rango más amplio de señales de entradas se diseña el control selectivo.
(5.19)

Modelo y Control LQR de una aeronave de cuatro rotores
JUAN Mª DÍAZ CANO. 41
El control selectivo consiste en diseñar un control LQR para cada eje ‘X, Y, Z, Ψ’, y para cada amplitud que se desee. De este modo el controlador LQR resultante ‘K’ será una matriz 3D, donde la profundidad de ésta indica el escalón para el que se diseñó el control. En el caso que abordamos se crearán cuatro matrices, uno por cada eje ‘Y’ se diseñará el controlador para tres escalones positivos y otros tres negativos, obteniendo una matriz ‘k_x (:, :, i), k_y (:, :, i), k_z (:, :, i), k_psi (:, :, i)’, donde i es la profundidad, que en nuestro caso será seis posiciones.
Figura 5.9. Estructura de la matriz de ganancias ‘k’ del control LQR.
Utilizando este método, la estructura del control LQR sufre unas variaciones que se verán en la figura 5.10. El funcionamiento del control es el siguiente: dependiendo de la amplitud del error de entrada en cada eje ‘X, Y, Z, Ψ’, el sistema escogerá un control u otro, pero siempre por el siguiente orden de prioridad:
• Si el eje ‘Z’ < 0.7m, se actúa sobre dicho eje hasta que ‘Z’ > 0.7m.
• Si el eje ‘Z’ > 0.7m, se actúa sobre los ejes ’ Ψ, X, Y, Z’, en este orden.
La elección del controlador en cada eje se escogerá comparando la amplitud del error de dicho eje con los escalones para los que se diseñó cada controlador.
En la siguiente figura, se muestra la estructura del control LQR selectivo que hay que añadirle al modelo. Indistintamente de usar efecto integral o no, la estructura es la misma, lo único que varía es la dimensión de las matrices de ganancias 3D.
Figura 5.10. Estructura del control LQR selectivo.
Modelo y Control LQR de una aeronave de cuatro rotores
JUAN Mª DÍAZ CANO. 42
6 Capítulo. Estabilidad.
6.1 Introducción.
El Quad-Rotor es un sistema de naturaleza inestable, independientemente del punto de funcionamiento. Debido a esto se necesita un sistema de control para su correcto funcionamiento.
En este punto se estudiarán los polos del sistema en bucle abierto y bucle cerrado, para comprobar que el control cumple con su función, convertir un sistema inestable en estable. Para ello se utilizará la función de Matlab ‘eig(A)’, la cual devuelve los autovalores de la matriz A.
6.2 Comportamiento en bucle abierto.
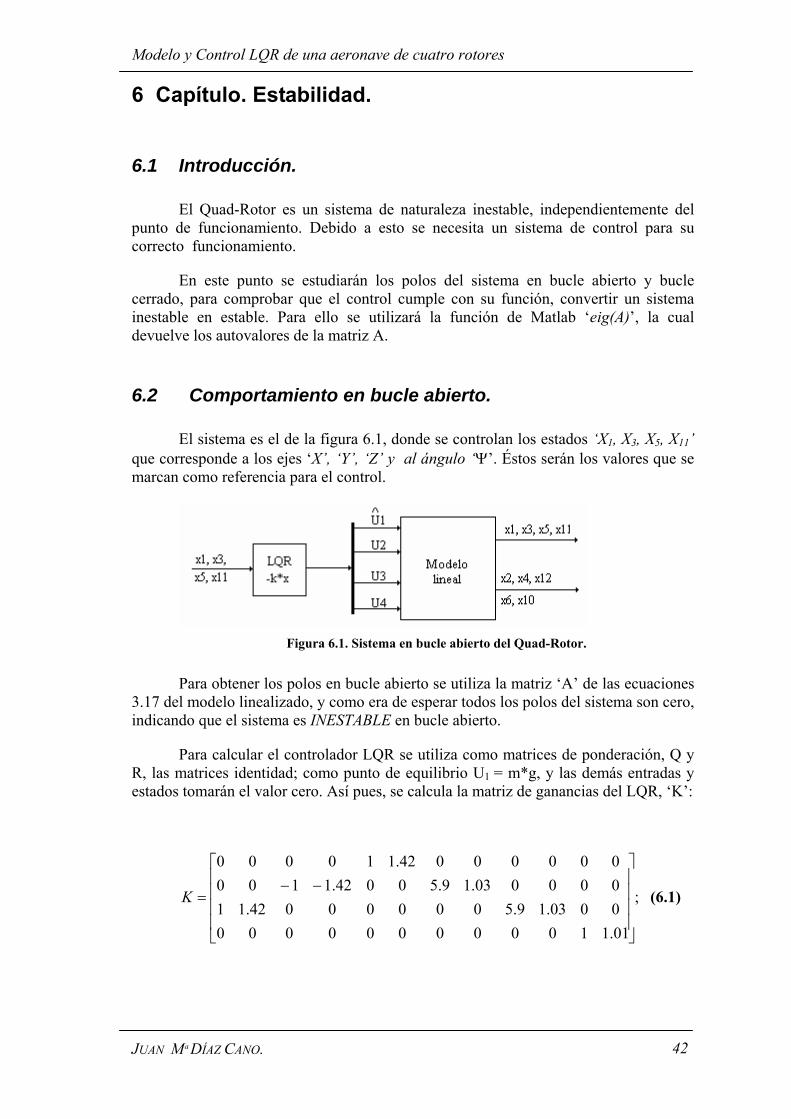
El sistema es el de la figura 6.1, donde se controlan los estados ‘X1, X3, X5, X11’ que corresponde a los ejes ‘X’, ‘Y’, ‘Z’ y al ángulo ‘Ψ’. Éstos serán los valores que se marcan como referencia para el control.
Figura 6.1. Sistema en bucle abierto del Quad-Rotor.
Para obtener los polos en bucle abierto se utiliza la matriz ‘A’ de las ecuaciones 3.17 del modelo linealizado, y como era de esperar todos los polos del sistema son cero, indicando que el sistema es INESTABLE en bucle abierto.
Para calcular el controlador LQR se utiliza como matrices de ponderación, Q y R, las matrices identidad; como punto de equilibrio U1 = m*g, y las demás entradas y estados tomarán el valor cero. Así pues, se calcula la matriz de ganancias del LQR, ‘K’:
;
01.1100000000000003.19.500000042.11000003.19.50042.110000000042.110000
⎥⎥⎥⎥
⎦
⎤
⎢⎢⎢⎢
⎣
⎡−−
=K (6.1)

Modelo y Control LQR de una aeronave de cuatro rotores
JUAN Mª DÍAZ CANO. 43
Para realizar las simulaciones se considera, como condición inicial, que todos los estados serán cero, menos el estado X5 (Eje Z) que será igual a uno, obteniéndose:
Figura6.1. Simulación en bucle abierto del modelo reducido.
Figura 6.2. Simulación en bucle abierto del modelo completo.
En las figuras 6.1 y 6.2 se observa que, colocando el sistema en un punto de equilibrio sin que existan perturbaciones, el sistema permanece estable en bucle abierto.
En el instante en el que uno de los estados presente una ligera variación, el sistema se vuelve inestable perdiendo el control. La figura 6.3 hace relación a un cambio en el valor inicial del estado X7 (ángulo ϕ), que pasa de valer 0rad a 0.04 rad, y en la simulación se ve reflejado, siendo incapaz el control LQR en lazo abierto de estabilizarlo.

Modelo y Control LQR de una aeronave de cuatro rotores
JUAN Mª DÍAZ CANO. 44
Figura 6.3. Simulación en bucle abierto del modelo reducido y modelo completo.
6.3 Comportamiento en bucle cerrado.
En este caso comprobaremos qué ocurre cuando cerramos el bucle de control y se aplica un control LQR. El sistema es el de la figura 6.4, donde se controlan los estados ‘X1, X3, X5, X11 ‘, añadiendo cuatro entradas de referencia ‘Xr1, Xr3, Xr5, Xr11’, que le afectan a los ejes ‘X’, ‘Y’, ‘Z’ y al ángulo ‘Ψ’.
Figura 6.4. Sistema en bucle cerrado del Quad-Rotor.
Utilizando como controlador LQR el calculado en el apartado anterior (ecuación 6.1), pasaremos a estudiar los polos en lazo cerrado.
Haciendo uso de la ecuación 3.17 del modelo linealizado, el sistema en bucle cerrado se escribe por las ecuaciones siguientes:
KBAABC *−= ; BBBC = ; CCBC = ; DDBC = ; (6.2)
Y al calcular los autovalores de la matriz ‘ABC’ de la ecuación 6.2, se comprueba que todos los autovalores salen negativo, por lo tanto el sistema en bucle cerrado es ESTABLE. Los valores de dichos autovalores se muestran a continuación.

Modelo y Control LQR de una aeronave de cuatro rotores
JUAN Mª DÍAZ CANO. 45
Estados X1 X2 X3 X4 X5 X6
Polos -160.6 -2.4+ i -2.4- i -1 -160.5 -1.3+ i
Estados X7 X8 X9 X10 X11 X12
Polos -1.3- i -89 -2.4+ i -2.4- i -1 -1
Al igual que en el caso anterior, en las simulaciones se utiliza como condición inicial, todos los estados a cero, menos el estado X5 (Eje ‘Z’), que toma el valor uno, obteniendo unos resultados idénticos a las figuras 6.1 y 6.2.
En el caso de que en uno de los estados se presente una ligera variación, el sistema no se vuelve inestable debido a la realimentación. La figura 6.5 y 6.6 hace relación a un cambio en el valor inicial del estado X7 (ángulo ‘ϕ’), que pasa de valer 0rad a 0.04 rad, y en la simulación se refleja como el controlador LQR estabiliza el sistema.
Figura 6.5. Simulación en bucle cerrado del modelo completo.
Figura 6.6. Simulación en bucle cerrado del modelo reducido.

Modelo y Control LQR de una aeronave de cuatro rotores
JUAN Mª DÍAZ CANO. 46
7 Capítulo. Sintonización del controlador LQR.
7.1 Introducción.
En este capítulo se realizará un estudio para encontrar los valores de ponderación de las matrices Q y R del control LQR que se adapten mejor (en velocidad de los estados ‘x’ y señal de control ‘u’) a los diferentes puntos de funcionamiento del Quad-Rotor. Se realizarán dos tipos de controladores LQR:
• LQR único.
• LQR selectivo o ganancia tabulada.
Para ayudar al cálculo de los diferentes controladores se ha implementado un programa llamado “Quad_Rotor.m”, el cual calcula los diferentes controladores de forma automática.
7.2 Zonas de funcionamiento.
Al Quad-Rotor le diferenciaremos tres zonas de funcionamiento: despegue, equilibrio y descenso, figura 7.1. En el caso del LQR único se diseña un solo LQR para trabajar en todas las zonas; con el LQR selectivo se diseñará un LQR para cada zona.
Figura 7.1. Zonas de funcionamiento del Quad-Rotor.
• Zona 1: Despegue del Quad-Rotor, donde la referencia que puede variar es el estado X5r (eje ‘Z’) y las demás referencias no varían.
• Zona 2: Equilibrio del Quad-Rotor, la referencia del eje ‘Z’ no varía y las demás referencias X1r, X3r X11r pueden variar (eje ‘X’, eje ‘Y’, ángulo ’Ψ’).
• Zona 3: Descenso del Quad-Rotor, donde la referencia que puede variar es el estado X5r (eje ‘Z’) y las demás referencias no varían.
Estas consideraciones se tendrán en cuenta a la hora de calcular el LQR selectivo, ya que se calculará un LQR para cada zona de trabajo.

Modelo y Control LQR de una aeronave de cuatro rotores
JUAN Mª DÍAZ CANO. 47
7.3 LQR único.
Este controlador se diseña para que funcione en todas las zonas de trabajo; para ello se realizan simulaciones optimizando cada eje (‘X’, ‘Y’, ‘Z’, ‘Ψ’) por separado y así conseguir los mejores valores de ponderación de las matrices Q y R en cada eje. Cuando se tengan los valores de Q y R se calcula el controlador LQR.
Para calcular el controlador se ha escogido como características:
• Para los ejes ‘X’, ‘Y’ se usa un escalón de 0.5 metros y se permite una caída del eje ‘Z’ de 0.2 metros como máximo.
• Para el eje ‘Z’ se usa un escalón de 0.5 metros.
• Para el eje ψ se ha escogido un escalón de 0.1 radianes.
• Las referencias se conseguirán lo más rápido posible pero sin sobreoscilación.
Con estas características y con la ayuda del programa Quad_Rotor.m se calculará los valores de las matrices Q y R.
En las gráficas del eje ‘Z’ se representarán el modelo reducido y el completo. En los demás casos sólo se representará el modelo completo.
• Controlador LQR para el eje ‘X’.
0 1 2 3 4 5 6 71
1.2
1.4
1.6
1.8Posición X (m)
Tiempo (s)
0 1 2 3 4 5 6 70.85
0.9
0.95
1Posición Z (m)
Tiempo (s)
Modelo completoModelo reducido
Figura 7.2. Controlador LQR para el eje ‘X’, los valores Q(2,2) y Q(10,10) = 0.08 y R(3,3) = 0.001.
• Controlador LQR para el eje ‘Y’.

Modelo y Control LQR de una aeronave de cuatro rotores
JUAN Mª DÍAZ CANO. 48
0 1 2 3 4 5 6 71
1.2
1.4
1.6
1.8Posición Y (m)
Tiempo (s)
0 1 2 3 4 5 6 70.85
0.9
0.95
1Posición Z (m)
Tiempo (s)
Modelo completoModelo reducido
Figura 7.3. Controlador LQR para el eje ‘Y’, los valores Q(4,4) y Q(8,8) = 0.08 y R(2,2) = 0.001.
• Controlador LQR para el eje ‘Z’.
0 1 2 3 4 5 6 70.9
1
1.1
1.2
1.3
1.4
1.5
1.6Posición Z (m)
Tiempo (s)
Modelo completoModelo reducido
Figura 7.4. Controlador LQR para el eje ‘Z’, los valores Q(6,6) = 0.02 y R(1,1) = 0.001.
• Controlador LQR para el eje ‘ψ’.

Modelo y Control LQR de una aeronave de cuatro rotores
JUAN Mª DÍAZ CANO. 49
0 1 2 3 4 5 6 70
0.05
0.1
0.15
0.2Posición PSI (rad)
Tiempo (s)
0 1 2 3 4 5 6 70.8
0.85
0.9
0.95
1Posición Z (m)
Tiempo (s)
Modelo completoModelo reducido
Figura 7.5. Controlador LQR para el eje ‘ψ’, los valores Q(12,12) = 0.02 y R(4,4) = 0.0005.
Con estas gráficas se comprueba que los valores de ponderación de las matrices Q y R es una de las mejores combinaciones que cumplen las características anteriormente descritas, mostrándose a continuación las matrices de ponderación resultantes:
;
02.0000000000000100000000000014.0000000000000100000000000014.0000000000000100000000000002.0000000000000100000000000014.0000000000000100000000000014.00000000000001
⎥⎥⎥⎥⎥⎥⎥⎥⎥⎥⎥⎥⎥⎥⎥⎥⎥
⎦
⎤
⎢⎢⎢⎢⎢⎢⎢⎢⎢⎢⎢⎢⎢⎢⎢⎢⎢
⎣
⎡
=Q (7.1)
Modelo y Control LQR de una aeronave de cuatro rotores
JUAN Mª DÍAZ CANO. 50
;
0005.00000001.00000001.00000001.0
⎥⎥⎥⎥
⎦
⎤
⎢⎢⎢⎢
⎣
⎡
=R (7.2)
El siguiente paso es el cálculo del controlador LQR utilizando dichos valores. Aplicando la función de Matlab ‘lqr’ se obtiene la matriz de ganancias ‘K’:
;
4.67.440000000000008.111.8400000013.266.3100008.111.84001.266.31000000002.76.310000
⎥⎥⎥⎥
⎦
⎤
⎢⎢⎢⎢
⎣
⎡−−
=K (7.3)
7.3.1 LQR efecto integral.
Como se vio en el capítulo 5, se añadirá al controlador LQR un efecto integral para que rechace las perturbaciones que se pudieran aplicar al sistema y no aparezcan errores en la posición. El efecto integral se añadirá al controlador LQR único y trabajará al igual que el anterior en todas las zonas de trabajo. Para el diseño del controlador LQR se utilizarán las ecuaciones 5.19.
Para encontrar el mejor LQR se realizarán varias simulaciones, optimizando cada eje (‘X’, ‘Y’, ‘Z’, ‘Ψ’) por separado y así conseguir los mejores valores de ponderación de las matrices Q y R. Cuando se tengan los valores de Q y R se calcula el controlador LQR.
Para calcular el controlador se han escogidos como características:
• Para los ejes ‘X’, ‘Y’ se usa un escalón de 0.5 metros y se permite una caída del eje ‘Z’ de 0.2 metros como máximo.
• Para el eje ‘Z’ se usa un escalón de 0.5 metros.
• Para el eje ‘Ψ’ se ha escogido un escalón de 0.1 radianes.
• Las referencias se conseguirán lo más rápido posible pero sin sobreoscilación, si es posible.
Con estas características y con la ayuda del programa Quad_Rotor.m se calculará los valores de las matrices Q y R.
En las gráficas del eje ‘Z’ se representarán el modelo reducido y el completo, en los demás casos, sólo se representará el modelo completo.

Modelo y Control LQR de una aeronave de cuatro rotores
JUAN Mª DÍAZ CANO. 51
• Controlador LQR para el eje ‘X’.
0 1 2 3 4 5 6 71
1.2
1.4
1.6Posición X (m)
Tiempo (s)
0 1 2 3 4 5 6 70.9
0.95
1
1.05Posición Z (m)
Tiempo (s)
Modelo completo
Modelo reducido
Figura 7.6. LQR eje ‘X’, los valores Q(2,2) = 0.05, Q(10,10) = 0.01, Q(13,13) = 1-5 y R(3,3) = 0.01.
• Controlador LQR para el eje ‘Y’.
0 1 2 3 4 5 6 71
1.2
1.4
1.6Posición Y (m)
Tiempo (s)
0 1 2 3 4 5 6 70.9
0.95
1
1.05Posición Z (m)
Tiempo (s)
Modelo completoModelo reducido
Figura 7.7. LQR eje ‘Y’, los valores Q(4,4) = 0.05, Q(8,8) = 0.01, Q(14,14) = 1-5 y R(2,2) = 0.01.

Modelo y Control LQR de una aeronave de cuatro rotores
JUAN Mª DÍAZ CANO. 52
• Controlador LQR para el eje ‘Z’.
0 0.2 0.4 0.6 0.8 1 1.2 1.4 1.6 1.8 20.9
1
1.1
1.2
1.3
1.4
1.5
1.6Posición Z (m)
Tiempo (s)
Modelo completo
Modelo reducido
Figura 7.8. LQR eje ‘Z’, los valores Q(6,6) = Q(15,15) = 1-4 y R(1,1) = 0.001.
• Controlador LQR para el eje ‘Ψ’.
0 1 2 3 4 5 6 70
0.05
0.1
Posición PSI (rad)
Tiempo (s)
0 1 2 3 4 5 6 70.9
0.95
1
1.05Posición Z (m)
Tiempo (s)
Modelo completoModelo reducido
Figura 7.9. LQR eje ‘Ψ’, los valores Q(12,12) = Q(16,16) = 0.01 y R(4,4) = 0.01.

Modelo y Control LQR de una aeronave de cuatro rotores
JUAN Mª DÍAZ CANO. 53
Hay que mencionar que en el eje ‘Z’ no ha sido posible encontrar valores de Q y R para que el sistema alcance la referencia sin sobreoscilaciones y de forma rápida. Con estas gráficas se comprueba que los valores de ponderación de las matrices Q y R es una de las mejores combinaciones que cumplen las características anteriormente descritas, mostrándose a continuación las matrices de ponderación resultantes:
;
01.0000000000000000010000000000000000100000000000000001000000000000000001.000000000000000001000000000000000001.000000000000000001000000000000000001.0000000000000000010000000000000000100000000000000001000000000000000005.000000000000000001000000000000000005.000000000000000001
4
5
5
4
⎥⎥⎥⎥⎥⎥⎥⎥⎥⎥⎥⎥⎥⎥⎥⎥⎥⎥⎥⎥⎥⎥⎥
⎦
⎤
⎢⎢⎢⎢⎢⎢⎢⎢⎢⎢⎢⎢⎢⎢⎢⎢⎢⎢⎢⎢⎢⎢⎢
⎣
⎡
=
−
−
−
−
Q
(7.4)
;
01.0000001.0000001.00000001.0
⎥⎥⎥⎥
⎦
⎤
⎢⎢⎢⎢
⎣
⎡
=R (7.5)
El siguiente paso es el cálculo del controlador LQR utilizando dichos valores. Aplicando la función de Matlab ‘lqr’ se obtiene la matriz de ganancias ‘K’.
;
100000003.00003.00031.000
1.11.1000000000000008.11500000098.510000008.1150098.510000000007.56.310000
⎥⎥⎥⎥
⎦
⎤−
⎢⎢⎢⎢
⎣
⎡−−
=K
(7.6)
Como se comprobará en el capítulo 10, con este controlador LQR las perturbaciones no se eliminan de forma rápida, siendo necesario diseñar otro controlador LQR donde el efecto integral de la matriz Q tenga mayor valor de ponderación.
Este controlador se usará para poder corregir los desajustes propios del paso del tiempo sobre el equipo.

Modelo y Control LQR de una aeronave de cuatro rotores
JUAN Mª DÍAZ CANO. 54
7.3.1.1 LQR efecto integral (con mayor ponderación).
Como se ha comentado en el apartado anterior hay que realizar el diseño de otro LQR donde el efecto integral tenga más ponderación, para que en el caso de existir perturbaciones, el control actúe y las elimine de forma rápida. Este controlador trabajará, al igual que el anterior, en todas las zonas de trabajo. Para el diseño del controlador LQR se utilizarán las ecuaciones 5.19.
Para encontrar el mejor LQR se realizarán varias simulaciones, optimizando cada eje (‘X’, ‘Y’, ‘Z’, ‘Ψ’) por separado y así conseguir los mejores valores de ponderación de las matrices Q y R. Cuando se tengan los valores de Q y R se calcula el controlador LQR.
Para calcular el controlador se han escogidos como características:
• Para los ejes ‘X’, ‘Y’ se usa un escalón de 0.5 metros y se permite una caída del eje ‘Z’ de 0.3 metros como máximo.
• Para el eje ‘Z’ se usa un escalón de 0.5 metros.
• Para el eje ‘Ψ’ se ha escogido un escalón de 0.1 radianes.
• Las referencias se conseguirán lo más rápido posible permitiendo una sobreoscilación máxima del 10%.
Con estas características y con la ayuda del programa Quad_Rotor.m se calculará los valores de las matrices Q y R.
. En las gráficas del eje ‘Z’ se representarán el modelo reducido y el completo, en los demás casos, sólo se representará el modelo completo.
• Controlador LQR para el eje ‘X’.
0 1 2 3 4 5 6 7 81
1.2
1.4
1.6
1.8Posición X (m)
Tiempo (s)
0 1 2 3 4 5 6 7 80.9
0.95
1
1.05Posición Z (m)
Tiempo (s)
Modelo reducidoModelo completo
1.58m
Referencia = 1.5m
Figura7.10. LQR eje ‘X’, los valores Q(2,2) =8-5, Q(10,10) = 8-3, Q(13,13) = 0.08 y R(3,3) = 0.01.
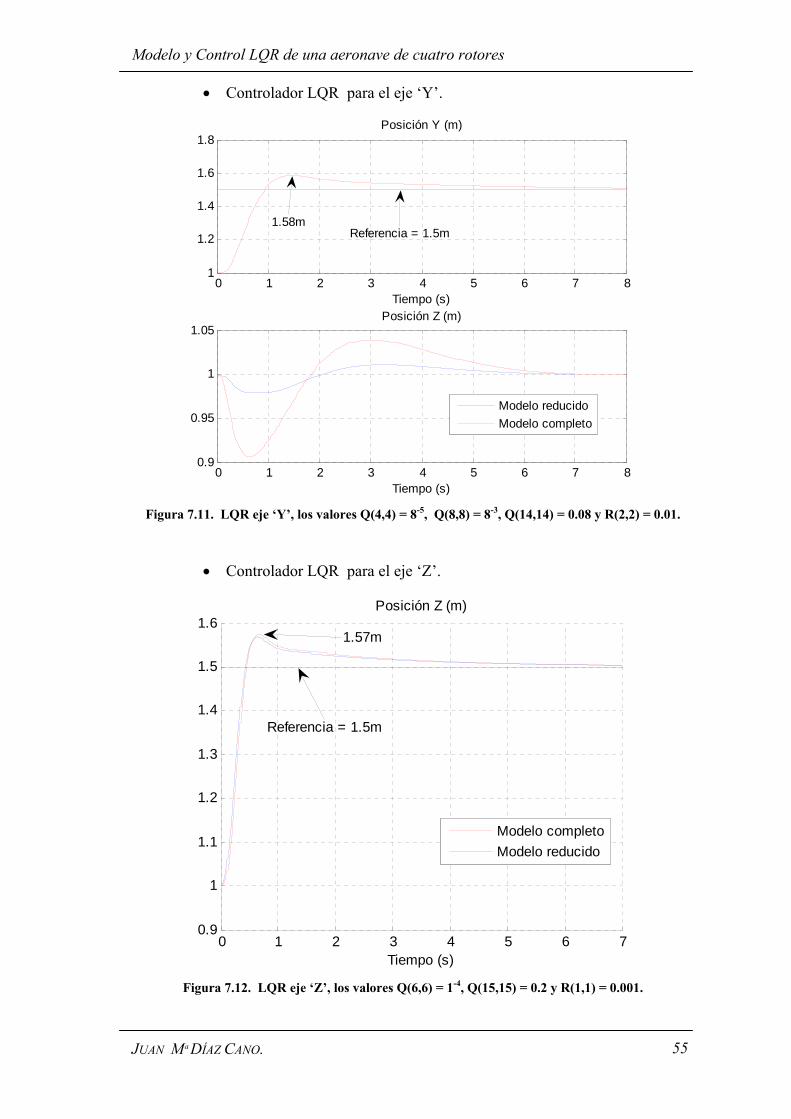
Modelo y Control LQR de una aeronave de cuatro rotores
JUAN Mª DÍAZ CANO. 55
• Controlador LQR para el eje ‘Y’.
0 1 2 3 4 5 6 7 81
1.2
1.4
1.6
1.8Posición Y (m)
Tiempo (s)
0 1 2 3 4 5 6 7 80.9
0.95
1
1.05Posición Z (m)
Tiempo (s)
Modelo reducidoModelo completo
Referencia = 1.5m1.58m
Figura 7.11. LQR eje ‘Y’, los valores Q(4,4) = 8-5, Q(8,8) = 8-3, Q(14,14) = 0.08 y R(2,2) = 0.01.
• Controlador LQR para el eje ‘Z’.
0 1 2 3 4 5 6 70.9
1
1.1
1.2
1.3
1.4
1.5
1.6Posición Z (m)
Tiempo (s)
Modelo completoModelo reducido
1.57m
Referencia = 1.5m
Figura 7.12. LQR eje ‘Z’, los valores Q(6,6) = 1-4, Q(15,15) = 0.2 y R(1,1) = 0.001.
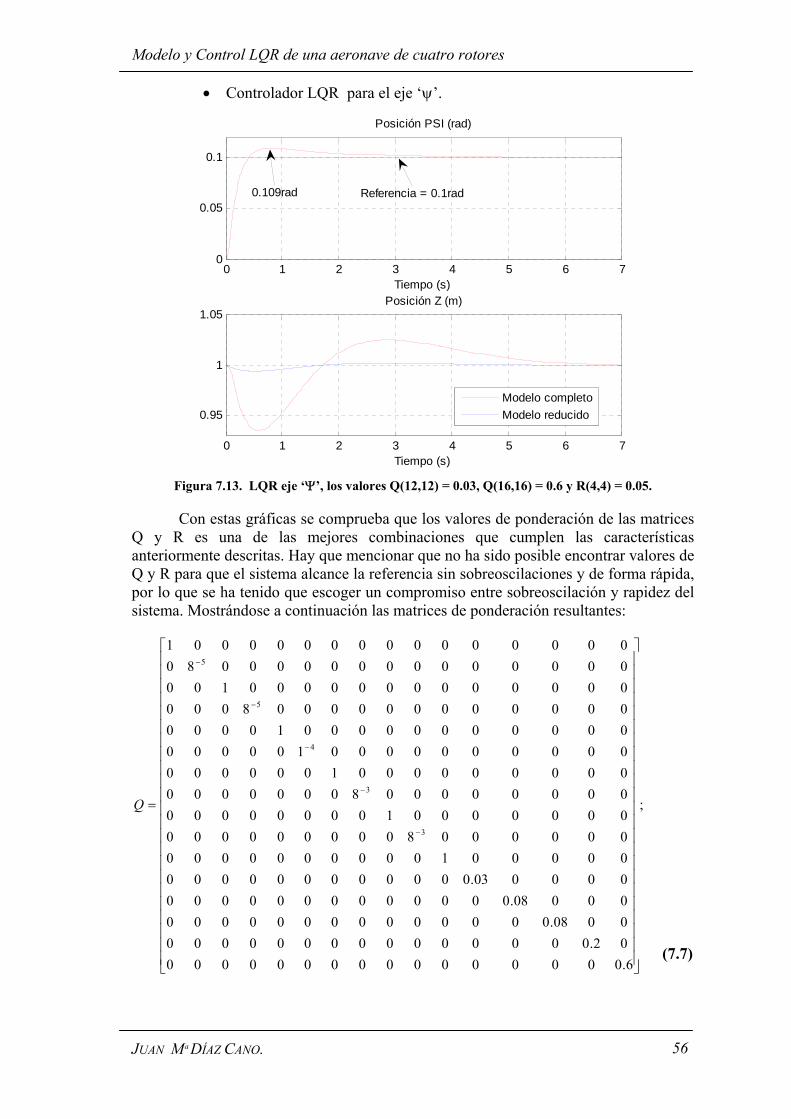
Modelo y Control LQR de una aeronave de cuatro rotores
JUAN Mª DÍAZ CANO. 56
• Controlador LQR para el eje ‘ψ’.
0 1 2 3 4 5 6 70
0.05
0.1
Posición PSI (rad)
Tiempo (s)
0 1 2 3 4 5 6 7
0.95
1
1.05Posición Z (m)
Tiempo (s)
Modelo completoModelo reducido
0.109rad Referencia = 0.1rad
Figura 7.13. LQR eje ‘Ψ’, los valores Q(12,12) = 0.03, Q(16,16) = 0.6 y R(4,4) = 0.05.
Con estas gráficas se comprueba que los valores de ponderación de las matrices Q y R es una de las mejores combinaciones que cumplen las características anteriormente descritas. Hay que mencionar que no ha sido posible encontrar valores de Q y R para que el sistema alcance la referencia sin sobreoscilaciones y de forma rápida, por lo que se ha tenido que escoger un compromiso entre sobreoscilación y rapidez del sistema. Mostrándose a continuación las matrices de ponderación resultantes:
;
6.000000000000000002.0000000000000000008.0000000000000000008.0000000000000000003.00000000000000000100000000000000008000000000000000010000000000000000800000000000000001000000000000000010000000000000000100000000000000008000000000000000010000000000000000800000000000000001
3
3
4
5
5
⎥⎥⎥⎥⎥⎥⎥⎥⎥⎥⎥⎥⎥⎥⎥⎥⎥⎥⎥⎥⎥⎥⎥
⎦
⎤
⎢⎢⎢⎢⎢⎢⎢⎢⎢⎢⎢⎢⎢⎢⎢⎢⎢⎢⎢⎢⎢⎢⎢
⎣
⎡
=
−
−
−
−
−
Q
(7.7)

Modelo y Control LQR de una aeronave de cuatro rotores
JUAN Mª DÍAZ CANO. 57
;
05.0000001.0000001.00000001.0
⎥⎥⎥⎥
⎦
⎤
⎢⎢⎢⎢
⎣
⎡
=R (7.8)
El siguiente paso es el cálculo del controlador LQR utilizando dichos valores. Aplicando la función de Matlab ‘lqr’ se obtiene la matriz de ganancias ‘K’.
;
46.300000082.20082.2001.1400
84.008.500000000000099.05.1400000079.55.11000099.05.140079.55.110000000097.51.340000
⎥⎥⎥⎥
⎦
⎤−
⎢⎢⎢⎢
⎣
⎡−−
=K
(7.9)
7.4 LQR selectivo.
Este controlador se diseña para que trabaje en todas las zonas de trabajo, pero se calculan varios LQR dependiendo de la amplitud de la referencia de entrada. Para ello se realizan simulaciones, optimizando cada eje (‘X’, ‘Y’, ‘Z’, ‘Ψ’) por separado y así conseguir los mejores valores de ponderación de las matrices Q y R. Cuando se tengan los valores de Q y R, se calculan los controladores LQR.
Uno de los problemas que puede presentar los controladores conmutados es la falta de continuidad, que puede existir en la señal de control que se aplica al sistema, debido a que el controlador LQR diseñado varía en función del error y pueden aparecer discontinuidades en la señal de control, que al aplicarlas al sistema pueden aparecer vibraciones y comportamientos extraños por parte del Quad-Rotor.
Para calcular el controlador se ha escogido como características:
• Para los ejes ‘X’, ‘Y’ se usan escalones de [0.25, 0.5, 0.75] metros de amplitud y se permite una caída del eje ‘Z’ de 0.2 metros como máximo.
• Para el eje ‘Z’ se usa un escalón de [0.25, 0.5, 1] metros de amplitud.
• Para el eje ‘Ψ’ se ha escogido un escalón de [0.08, 0.17, 0.35] radianes de amplitud, estos valores corresponden a 5º, 10º y 20º.
• Las referencias se conseguirán lo más rápido posible pero sin sobreoscilación.
Con estas características y con la ayuda del programa Quad_Rotor.m se calcularán los valores de Q y R con las amplitudes de los escalones positivos y negativos, obteniendo seis valores de Q y R para cada eje ‘X’, ‘Y’, ‘Z’ y ‘Ψ’.
Una vez calculados los controladores LQR para los valores Q y R, el programa Quad_Rotor.m almacena los LQR en matrices 3D de la forma “km_x(:, :, indi), km_y(:, :, indi), km_z(:, :, indi), km_ψ(:, :, indi)”, donde “indi = 1,2,..,n” indica el

Modelo y Control LQR de una aeronave de cuatro rotores
JUAN Mª DÍAZ CANO. 58
controlador LQR de cada amplitud, comenzando por los escalones de amplitud positiva y terminando por las negativas. En estás gráficas el modelo que se simula es el modelo completo y los resultados obtenidos son los que siguen:
• Controlador LQR para el eje ‘X’ e ‘Y’.
0 1 2 3 4 5 6 70
0.2
0.4
0.6
0.8Posición X e Y (m)
Tiempo (s)
0 1 2 3 4 5 6 70.8
0.85
0.9
0.95
1Posición Z (m)
Tiempo (s)
Escalon 'x, y = 0.25m'Escalon 'x, y = 0.5m'Escalon 'x, y = 0.75m'
Figura 7.14. Controlador LQR para los ejes ‘X’ e ‘Y’.
0 1 2 3 4 5 6 7-0.8
-0.6
-0.4
-0.2
0Posición X e Y (m)
Tiempo (s)
0 1 2 3 4 5 6 70.8
0.85
0.9
0.95
1Posición Z (m)
Tiempo (s)
Escalon 'x, y = -0.25m'Escalon 'x, y = -0.5m'Escalon 'x, y = -0.75m'
Figura 7.15. Controlador LQR para los ejes ‘X’ e ‘Y’.

Modelo y Control LQR de una aeronave de cuatro rotores
JUAN Mª DÍAZ CANO. 59
• Controlador LQR para el eje ‘Z’.
0 1 2 3 4 5 6 70.5
1
1.5
2
2.5Posición eje Z (m)
Tiempo (s)
0 1 2 3 4 5 6 70
0.5
1Posición eje Z (m)
Tiempo (s)
Escalón 'z = 0.25m'Escalón 'z = 0.5m'Escalón 'z = 1m'
Escalón 'z = 0.25m'Escalón 'z = 0.5m'Escalón 'z = -1m'
Figura 7.16. Controlador LQR para el eje ‘Z’.
• Controlador LQR para el eje ‘Ψ’.
0 1 2 3 4 5 6 70
0.1
0.2
0.3
0.4Angulo PSI (rad)
Tiempo (s)
0 1 2 3 4 5 6 70.8
0.85
0.9
0.95
1Posición Z (m)
Tiempo (s)
Escalón 'psi = 0.08 rad'Escalón 'psi = 0.17 rad'Escalón 'psi = 0.35 rad'
Figura 7.17. Controlador LQR para el eje ‘Ψ’.
Para el caso de escalones negativos en el eje ‘Ψ’, los valores obtenidos para Q y R son iguales que los valores de la figura 26.

Modelo y Control LQR de una aeronave de cuatro rotores
JUAN Mª DÍAZ CANO. 60
Una vez se tienen los valores óptimos de las matrices Q y R, se calculan las matrices ‘K’ para cada eje ‘X’, ‘Y’, ‘Z’ y ‘Ψ’, haciendo uso de la función ‘agrupa_los_LQR.m’, obteniendo:
• Controladores LQR para el eje ‘X’.
Amplitud de los escalones aplicados: [0.25, 0.5, 0.75, -0.25, -0.5, -0.75].
Valores calculados de Q(2,2), Q(10,10): [ 0.14, 0.14, 0.14, 0.14, 0.14, 0.14,].
Valores calculados de R(3,3): [0.001, 0.001, 0.001, 0.001, 0.001, 0.001,].
Las seis matrices (i = 1, 2, 3, 4, 5, 6) de ganancias ‘km_x’ son iguales porque los valores de Q y R son iguales para todos los escalones aplicados.
;
4.67.440000000000008.111.840000001.266.3100008.111.84001.266.31000000005.66.310000
):,(:,_
⎥⎥⎥⎥
⎦
⎤
⎢⎢⎢⎢
⎣
⎡−−
=ixKm (7.10)
• Controlador LQR para el eje ‘Y’.
Amplitud de los escalones aplicados: [0.25, 0.5, 0.75, -0.25, -0.5, -0.75].
Valores calculados de Q(4,4), Q(8,8): [ 0.14, 0.14, 0.14, 0.14, 0.14, 0.14,].
Valores calculados de R(2,2): [0.001, 0.001, 0.001, 0.001, 0.001, 0.001,].
Las seis matrices (i = 1, 2, 3, 4, 5, 6) de ganancias ‘km_y’ son iguales porque los valores de Q y R son iguales para todos los escalones.
;
4.67.440000000000008.111.840000001.266.3100008.111.84001.266.31000000005.66.310000
):,(:,_
⎥⎥⎥⎥
⎦
⎤
⎢⎢⎢⎢
⎣
⎡−−
=iyKm (7.11)
• Controlador LQR para el eje ‘Z’.
Amplitud de los escalones aplicados: [0.25, 0.5, 0.75, -0.25, -0.5, -0.75].
Valores calculados de Q(6,6): [ 0.01, 0.01, 0.01, 0.01, 0.01, 0.02].
Valores calculados de R(1,1): [0.001, 0.001, 0.001, 0.001, 0.001, 0.001].

Modelo y Control LQR de una aeronave de cuatro rotores
JUAN Mª DÍAZ CANO. 61
Las cinco primeras matrices (i = 1, 2, 3, 4, 5) de ganancias ‘km_z’ son iguales porque los valores de Q y R son iguales para los cinco primeros escalones.
;
7.43.330000000000008.111.840000001.266.3100008.111.84001.266.31000000005.66.310000
):,(:,_
⎥⎥⎥⎥
⎦
⎤
⎢⎢⎢⎢
⎣
⎡−−
=izKm (7.12)
;
6.11.110000000000008.111.840000001.266.3100008.111.84001.266.31000000002.76.310000
)6:,(:,_
⎥⎥⎥⎥
⎦
⎤
⎢⎢⎢⎢
⎣
⎡−−
=zKm (7.13)
• Controlador LQR para el eje ‘Ψ’.
Amplitud de los escalones aplicados: [0.25, 0.5, 0.75, -0.25, -0.5, -0.75].
Valores calculados de Q(6,6): [ 0.02, 0.02, 0.02, 0.02, 0.02, 0.02].
Valores calculados de R(1,1): [0.0005, 0.0009, 0.0081, 0.0005, 0.0009, 0.0081].
;
4.67.420000000000008.111.840000001.266.3100008.111.84001.266.31000000005.66.310000
)1:,(:,_
⎥⎥⎥⎥
⎦
⎤
⎢⎢⎢⎢
⎣
⎡−−
=ψKm (7.14)
;
7.43.330000000000008.111.840000001.266.3100008.111.84001.266.31000000005.66.310000
)2:,(:,_
⎥⎥⎥⎥
⎦
⎤
⎢⎢⎢⎢
⎣
⎡−−
=ψKm (7.15)
;
6.11.110000000000008.111.840000001.266.3100008.111.84001.266.31000000005.66.310000
)3:,(:,_
⎥⎥⎥⎥
⎦
⎤
⎢⎢⎢⎢
⎣
⎡−−
=ψKm (7.16)
);1:,(:,_)4:,(:,_ ψψ KmKm =
(7.17)
);2:,(:,_)5:,(:,_ ψψ KmKm =
(7.18)
);3:,(:,_)6:,(:,_ ψψ KmKm =
(7.19)

Modelo y Control LQR de una aeronave de cuatro rotores
JUAN Mª DÍAZ CANO. 62
7.5 Conclusión.
En este capítulo se han diseñado dos tipos de controladores LQR, un diseño sin efecto integral y otro con efecto integral. Además, estos controles LQR se han diseñados tanto para el caso de utilizar un solo controlador o usar varios controladores, que trabajen en toda la zona.
En el caso de usar un solo controlador, se optimizará el LQR para una señal de entrada de una determinada amplitud. En el otro caso se calcularán varios LQR optimizados cada uno, para una señal de entrada determinada, por lo que el comportamiento deberá ser mejor cuando hay señales de entradas variables.
Los valores de ponderación de las matrices Q, R obtenidos en este capítulo son una de las mejores combinaciones para los puntos de funcionamiento escogidos, ya que se alcanzan las referencias de forma rápida y sin sobreoscilaciones, a excepción del caso donde existe efecto integral que aparece una pequeña sobreoscilación.

Modelo y Control LQR de una aeronave de cuatro rotores
JUAN Mª DÍAZ CANO. 63
8 Capítulo. Simulaciones del controlador LQR único.
8.1 Introducción.
En este capítulo se realizarán las simulaciones con un controlador LQR sobre los dos modelos del Quad-Rotor mencionados en el capítulo 4 (modelo reducido y modelo completo). Además, se comprobará la robustez del control ante perturbaciones y el comportamiento de ambos modelos, debiendo existir diferencias entre ellos, porque la dinámica de los motores tiene influencia sobre el modelo del Quad-Rotor y esta dinámica se acentúa más cuando el Quad-Rotor se hace rápido comparable con la dinámica de los motores.
8.2 Simulaciones con el Modelo reducido.
El modelo que se simulará es el de la figura 8.1. Se cogerán como entradas cuatro señales de referencia ‘Xr’, ‘Yr’, ‘Zr’, ‘Ψr’, cuyos valores serán modificados con forma de escalón. Las salidas que se representan son ‘X’, ‘Y’, ‘Z’, ‘φ’, ‘θ’, ‘Ψ’.
Figura 8.1. Modelo reducido con controlador LQR.
El controlador LQR escogido para estudiar el comportamiento en simulación será el obtenido en el capítulo 7, apartado 7.3. A este LQR se le aplicarán cambios en las señales de entrada de forma individual, donde los escalones aplicados serán de 0.5m y 1m de amplitud en las referencias ‘Xr’, ‘Yr’, ‘Zr’ y 0.26rad (15º) y 1.57rad (90º) de amplitud en la referencia ‘Ψr’.
Posteriormente se realizarán unas simulaciones cambiando simultáneamente las referencias en varios ejes. También se estudiará, en el punto siguiente, cómo se comporta el controlador LQR ante perturbaciones.
8.2.1 Cambio de la referencia en un eje.
Se comenzará variando las referencias de los ejes ‘Xr’, ‘Yr’, ‘Zr’ con amplitudes de 0.5m y la referencia ‘Ψr’ con amplitudes de 0.26rad (15º).

Modelo y Control LQR de una aeronave de cuatro rotores
JUAN Mª DÍAZ CANO. 64
• Escogiendo como punto inicial todos los estados a cero.
0 0.5 1 1.5 2 2.5 3 3.5 40
0.2
0.4
0.6Posición Z (m)
Tiempo (s)
Referencia 0.5mValor del eje Z
0 0.5 1 1.5 2 2.5 3 3.5 4100
150
200
250
300Velocidad motores 1, 2, 3, 4 (rad/s)
Tiempo (s)
Motor U1Motor U2Motor U3Motor U4
278rad/s
201.7rad/s
Figura 8.2. Simulación cambiando la referencia del eje ‘Z’ en 0.5 metros.
En la figura 8.2 se muestra como el sistema pasa de un punto inicial ‘Z = 0’ al valor aplicado en la referencia (0.5 metros). Además, la referencia se alcanza de forma rápida, en 0.7segundos y sin sobreoscilaciones, teniendo un tiempo de subida de 0.5s y un tiempo de establecimiento de 0.6s.
En la gráfica de las velocidades se observa como la velocidad de los motores pasan de cero a saturación 278 rad/s en cero segundos, característica que no ocurrirá en las simulaciones del modelo completo, al tener incorporada la dinámica de los motores.
• Escogiendo como punto inicial todos los estados a cero y ‘Z = 1’.
En esta simulación se representará la posición del eje ‘X’, el ángulo ‘θ’, la posición del eje ‘Z’ y las velocidades de los motores.
En la figura 8.3 se describe el comportamiento del Quad-Rotor cuando se cambia la referencia en el eje ‘X’, pasando de la posición cero a 0.5 metros. El ángulo afectado en este desplazamiento (desplazamiento en el eje X) es ‘θ’ y de forma indirecta también afectan a la posición ‘Z’, ya que la propulsión de los motores no es perpendicular al suelo y pierde fuerza de empuje el sistema.
El sistema en dos segundos alcanza la referencia sin oscilaciones, teniendo un tiempo de subida de 1.4s y un tiempo de establecimiento de 1.7s. El ángulo ‘θ’ alcance un máximo de 0.13rad y a los 2.5 segundos está estabilizado. El eje ‘Z’ se ve poco afectado puesto que los motores pueden alcanzar las velocidades impuestas por el controlador de forma instantánea, debido a esto el descenso es de 1 milímetro. La

Modelo y Control LQR de una aeronave de cuatro rotores
JUAN Mª DÍAZ CANO. 65
velocidad angular del motor U3 se mantiene saturada durante 15ms, mientras que en ese tiempo el motor U1 permanece parado.
0 1 2 3 4 5 60
0.2
0.4
0.6Posición X (m)
Referencia 0.5mValor del eje X
0 1 2 3 4 5 6-0.1
0
0.1
Águlo theta (rad)
0 1 2 3 4 5 60.999
0.9995
1
Posición Z (m)
0 0.05 0.1 0.15 0.2 0.25 0.3 0.35 0.4 0.45 0.50
100
200
Velocidad motores 1, 2, 3, 4 (rad/s)
Tiempo (s)
Motor U1Motor U2Motor U3Motor U4
Referencia 1mValor del eje Z
278rad/s 201.7rad/s
Figura 8.3. Simulación cambiando la referencia del eje ‘X’ en 0.5 metros.
En la siguiente simulación se representará la posición del eje ‘Y’, el ángulo ‘φ’, la posición del eje ‘Z’ y las velocidades de los motores.
En la figura 8.4 se describe el comportamiento del Quad-Rotor cuando se cambia la referencia en el eje ‘Y’, pasando de la posición cero a 0.5 metros, consiguiendo al igual que en el eje ‘X’ un tiempo de subida de 1.4s y un tiempo de establecimiento de 1.7s. En este caso, el ángulo φ afecta al desplazamiento en el eje ‘Y’ y de forma indirecta también perjudica a la posición ‘Z’ por el mismo motivo.
Como se ve en la gráfica, el comportamiento es simétrico al del eje ‘X’, alcanzado la referencia en dos segundos y consiguiendo que el ángulo ‘θ’ alcance un máximo de -0.13rad y se acabe estabilizando a los 2.5 segundos.
En este caso, al igual que el anterior, el eje ‘Z’ se ve poco afectado debido a que el descenso es de 1 milímetro y la velocidad angular del motor U2 se mantiene saturada
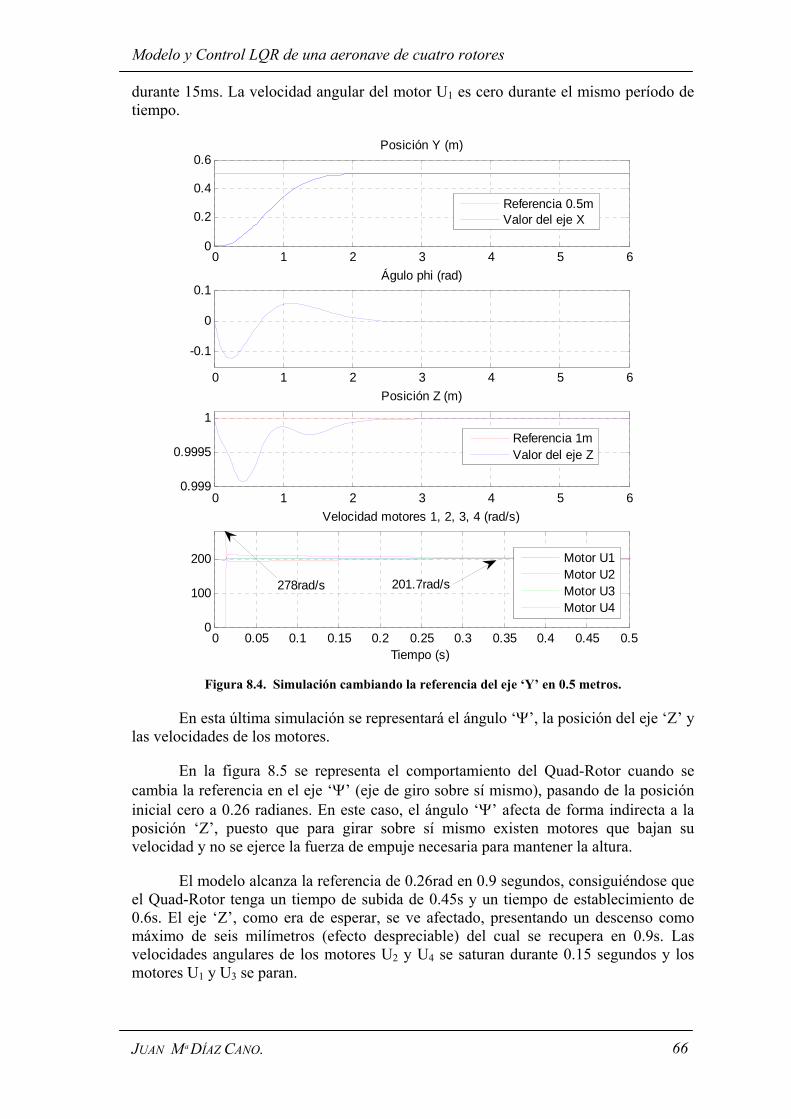
Modelo y Control LQR de una aeronave de cuatro rotores
JUAN Mª DÍAZ CANO. 66
durante 15ms. La velocidad angular del motor U1 es cero durante el mismo período de tiempo.
0 1 2 3 4 5 60
0.2
0.4
0.6Posición Y (m)
Referencia 0.5mValor del eje X
0 1 2 3 4 5 6
-0.1
0
0.1Águlo phi (rad)
0 1 2 3 4 5 60.999
0.9995
1
Posición Z (m)
0 0.05 0.1 0.15 0.2 0.25 0.3 0.35 0.4 0.45 0.50
100
200
Velocidad motores 1, 2, 3, 4 (rad/s)
Tiempo (s)
Referencia 1mValor del eje Z
Motor U1Motor U2Motor U3Motor U4
278rad/s 201.7rad/s
Figura 8.4. Simulación cambiando la referencia del eje ‘Y’ en 0.5 metros.
En esta última simulación se representará el ángulo ‘Ψ’, la posición del eje ‘Z’ y las velocidades de los motores.
En la figura 8.5 se representa el comportamiento del Quad-Rotor cuando se cambia la referencia en el eje ‘Ψ’ (eje de giro sobre sí mismo), pasando de la posición inicial cero a 0.26 radianes. En este caso, el ángulo ‘Ψ’ afecta de forma indirecta a la posición ‘Z’, puesto que para girar sobre sí mismo existen motores que bajan su velocidad y no se ejerce la fuerza de empuje necesaria para mantener la altura.
El modelo alcanza la referencia de 0.26rad en 0.9 segundos, consiguiéndose que el Quad-Rotor tenga un tiempo de subida de 0.45s y un tiempo de establecimiento de 0.6s. El eje ‘Z’, como era de esperar, se ve afectado, presentando un descenso como máximo de seis milímetros (efecto despreciable) del cual se recupera en 0.9s. Las velocidades angulares de los motores U2 y U4 se saturan durante 0.15 segundos y los motores U1 y U3 se paran.

Modelo y Control LQR de una aeronave de cuatro rotores
JUAN Mª DÍAZ CANO. 67
0 1 2 3 4 5 60
0.2
0.4Ángulo PSI (rad)
Tiempo (s)
Referencia 0.26radValor del eje PSI
0 1 2 3 4 5 6
0.992
0.994
0.996
0.998
1
Posición Z (m)
Tiempo (s)
Referencia 1mValor del eje Z
0 0.5 1 1.50
100
200
Velocidad motores 1, 2, 3, 4 (rad/s)
Tiempo (s)
Motor U1Motor U2Motor U3Motor U4
201.7rad/s278rad/s
Figura 8.5. Simulación cambiando la referencia del ángulo’Ψ’ en 0.26 radianes (15º).
8.2.2 Cambio de la referencia en varios ejes.
Se realizarán dos simulaciones en las cuales se variarán de forma simultánea las referencias de entradas ‘Xr’, ‘Yr’, ‘Zr’, con amplitudes de 0.75m, 1m, 1m y la referencia ‘Ψr’ con amplitudes de 0.26rad (15º).
• Escogiendo como punto inicial todos los estados a cero y ‘Z = 1’.
En esta simulación se representará las posiciones de los ejes ‘X’ e ‘Y’, los ángulos ‘θ’, ‘φ’ y‘φ’, la posición del eje ‘Z’ y las velocidades de los motores.
En la figura 8.6 se muestra el resultado de esta simulación. Hay que recordar que el controlador que se usa en las simulaciones está diseñado para escalones de 0.5m en los ejes ‘X’, ‘Y’, ‘Z’, y un escalón de 0.1rad en el ángulo‘Ψ’. En esta simulación, se aplican escalones de referencias superiores a las utilizadas en el diseño, por ello pueden existir variaciones en el comportamiento del sistema.
En las gráficas se muestra que el sistema a los cuatro segundos todos los errores están a cero, siendo el ángulo ‘Ψ’ el más rápido, seguido del eje ‘Z’. El

Modelo y Control LQR de una aeronave de cuatro rotores
JUAN Mª DÍAZ CANO. 68
comportamiento de estos dos ejes, ‘Z’ y ‘Ψ’, son idénticos a las gráficas anteriores, manteniendo los mismo tiempos de subida y de establecimiento.
En cambio, en los ejes ‘X’ e ‘Y’ el comportamiento varía, ya que aparece una sobreoscilación del 7% en el eje ‘X’ y del 0.5% en el eje ‘Y’. Se reduce el tiempo de subida y se aumenta el de establecimiento porque los ángulos toman valores mayores, adquiriendo estos tiempos los valores 1.1s y 2.2s respectivamente en el eje ‘X’. En el eje ‘Y’, tr valdrá 1.2s y ts será 1.3s. El ángulo ‘θ’ y ‘φ’ alcanzan un máximo de 0.23rad y -0.23rad respectivamente. El eje ‘Z’, en este caso, se ve poco afectado porque el descenso es de 1 milímetro, manteniendo los mismos tiempos de subida y de establecimiento que en la simulación del eje ‘Z’.
0 1 2 3 4 5 6 70
0.5
1
Posición X e Y (m)
Referencia XValor del eje XReferencia YValor del eje Y
0 1 2 3 4 5 6 7
-0.2
0
0.2
Águlo theta, phi, psi (rad)
Ángulo thetaÁngulo phiReferencia psiÁngulo psi
0 1 2 3 4 5 6 70
1
2
Posición Z (m)
ReferenciaValor del eje Z
0 0.2 0.4 0.6 0.8 1 1.2 1.4 1.6 1.8 20
100
200
Velocidad motores 1, 2, 3, 4 (rad/s)
Tiempo (s)
Motor U1Motor U2Motor U3Motor U4
0.26rad
Figura 8.6. Simulación cambiando las cuatro referencias de forma simultánea.

Modelo y Control LQR de una aeronave de cuatro rotores
JUAN Mª DÍAZ CANO. 69
8.2.3 Perturbaciones mantenidas.
Se simulará el Quad-Rotor aplicando de forma independiente perturbaciones que afectarán a las fuerzas de empuje U1, U2, U3, y U4. En el capítulo 2, ecuación 2.24, se obtuvieron las fuerzas de empujes máximas y mínimas que puede entregar el sistema propulsor. Teniendo en cuenta estos datos, se calcularán las perturbaciones que se aplicarán.
Para realizar estas simulaciones, se partirá de un punto inicial donde todos los estados son cero y el eje ‘Z‘ será un metro y como punto final se marcará una referencia de ‘Xr’, ‘Yr’ y ‘Zr’, un escalón de 0.5m y el ángulo‘Ψr’ una referencia de 0.1rad.
• Perturbaciones en la fuerza U1.
La fuerza U1 afecta principalmente al eje ‘Z’ y tiene unos límites de 0N el mínimo y 9.67N como máximo. En esta simulación se aplicará una perturbación de 4N y -3N.
0 1 2 3 4 5 6 70.5
1
1.5
2Posición Z (m)
ReferenciaValor del eje Z
0 1 2 3 4 5 6 7-5
0
5Perturbación en U1 (N)
0 1 2 3 4 5 6 70
100
200
300Velocidad motores 1, 2, 3, 4 (rad/s)
Tiempo (s)
Motor U1Motor U2Motor U3Motor U4
4N
-3N
201.7rad/s
93rad/s
254rad/s
1.6m
1.4m
Figura 8.7. Simulación con perturbaciones en U1..
Como se ve en la figura 8.7, el control LQR diseñado no es capaz de rechazar las perturbaciones y aparece un error en la posición de 1cm para la perturbación positiva y negativa, pero el sistema no se vuelve inestable en ningún momento.

Modelo y Control LQR de una aeronave de cuatro rotores
JUAN Mª DÍAZ CANO. 70
Para solucionar este problema se usará un LQR con efecto integral, de esa forma se corregirá el error en posición debido a las perturbaciones.
• Perturbaciones en la fuerza U2.
La fuerza U2 afecta directamente al eje ‘Y’ y los límites de saturación son -0.57N el mínimo y 0.57N como máximo. Para realizar la simulación se aplicará una perturbación de 0.5N y -0.3N.
0 1 2 3 4 5 60
0.2
0.4
Posición Y (m)
Referencia de 0.5mValor del eje Y
0 1 2 3 4 5 6-0.5
0
0.5Perturbación en U2 (N)
0 1 2 3 4 5 60
100
200
300Velocidad motores 1, 2, 3, 4 (rad/s)
Tiempo (s)
Motor U1Motor U2Motor U3Motor U4
0.48m 0.51m
-0.3N
273rad/s
247rad/s
82rad/s 142rad/s
Figura 8.8. Simulación con perturbaciones en U2.
Como se ve en la figura 8.8, como en la figura 8.7, aparece un error en la posición de 2cm para la primera perturbación y en la perturbación negativa aparece un error de 1cm, por lo tanto el control diseñado no rechaza las perturbaciones, pero el sistema no se vuelve inestable en ningún momento.

Modelo y Control LQR de una aeronave de cuatro rotores
JUAN Mª DÍAZ CANO. 71
• Perturbaciones en la fuerza U3.
La fuerza U3 afecta directamente al eje ‘X’ y los límites de saturación son -0.57N el mínimo y 0.3N como máximo.
El comportamiento de los ejes ‘X’ e ‘Y’ y los límites de fuerza de empuje son iguales, por tanto la simulación del eje ‘X’ debería salir igual a la del eje ‘Y’, la única modificación es que los motores afectados serían U1 y U3.
El comportamiento de estos ejes serían iguales si no cambiásemos la referencia del ángulo ‘Ψ’. Como la referencia ‘Ψr’ es 0.1rad y la primera perturbación es positiva, ayuda a que aparezca en el eje ‘X’ una sobreoscilación, siendo ésta la diferencia existente entre las gráficas ‘X’ e ‘Y’, figura 8.8 y 8.9 respectivamente.
0 1 2 3 4 5 6-0.5
0
0.5Perturbación en U3 (N)
0 1 2 3 4 5 60
0.2
0.4
Posición X (m)
0 1 2 3 4 5 60
100
200
300Velocidad motores 1, 2, 3, 4 (rad/s)
Tiempo (s)
Motor U1Motor U2Motor U3Motor U4
Referencia de 0.5mValor del eje X
0.52m 0.49m
-0.3N
273rad/s
247rad/s
82rad/s 142rad/s
Figura 8.9. Simulación con perturbaciones en U3.

Modelo y Control LQR de una aeronave de cuatro rotores
JUAN Mª DÍAZ CANO. 72
• Perturbaciones en la fuerza U4.
La fuerza U4 afecta directamente al ángulo ‘Ψ’ y los límites de saturación son -0.11N el mínimo y 0.11N como máximo. Para realizar la simulación se aplicará una perturbación de 0.1N y -0.05N.
En la figura 8.10, se representa el ángulo ‘Ψ’ para estudiar su comportamiento cuando se le aplica una perturbación. Volverá a aparecer un error en la posición, cuyo valor es menor del 5% de la referencia tanto en la perturbación positiva como en la negativa, por lo que el sistema se encuentra dentro del intervalo de error permitido y el sistema no se vuelve inestable en ningún momento.
0 1 2 3 4 5 6-0.1
0
0.1Perturbación en U4 (N)
0 1 2 3 4 5 60
0.05
0.1
Ángulo psi (rad)
0 1 2 3 4 5 60
100
200
300Velocidad motores 1, 2, 3, 4 (rad/s)
Tiempo (s)
Motor U1Motor U2Motor U3Motor U4
ReferenciaÁngulo psi
0.101rad 0.09rad
-0.05N
272rad/s
239rad/s
86rad/s 155rad/s
Figura 8.10. Simulación con perturbaciones en U4.
• Perturbaciones en la fuerza U1, U2, U3, U4.
Para terminar este bloque, se realizará una simulación donde se aplique perturbaciones en todas las variables de empuje Ui y se aumentarán los escalones de referencias en las variables ‘Xr’ e ‘Yr’ en una amplitud de 1m, a ‘Zr’ un escalón de 2m y el ángulo‘Ψr’ una referencia de 0.26rad. De esta forma se comprobará cómo se comporta el control LQR cuando se le exige el máximo.
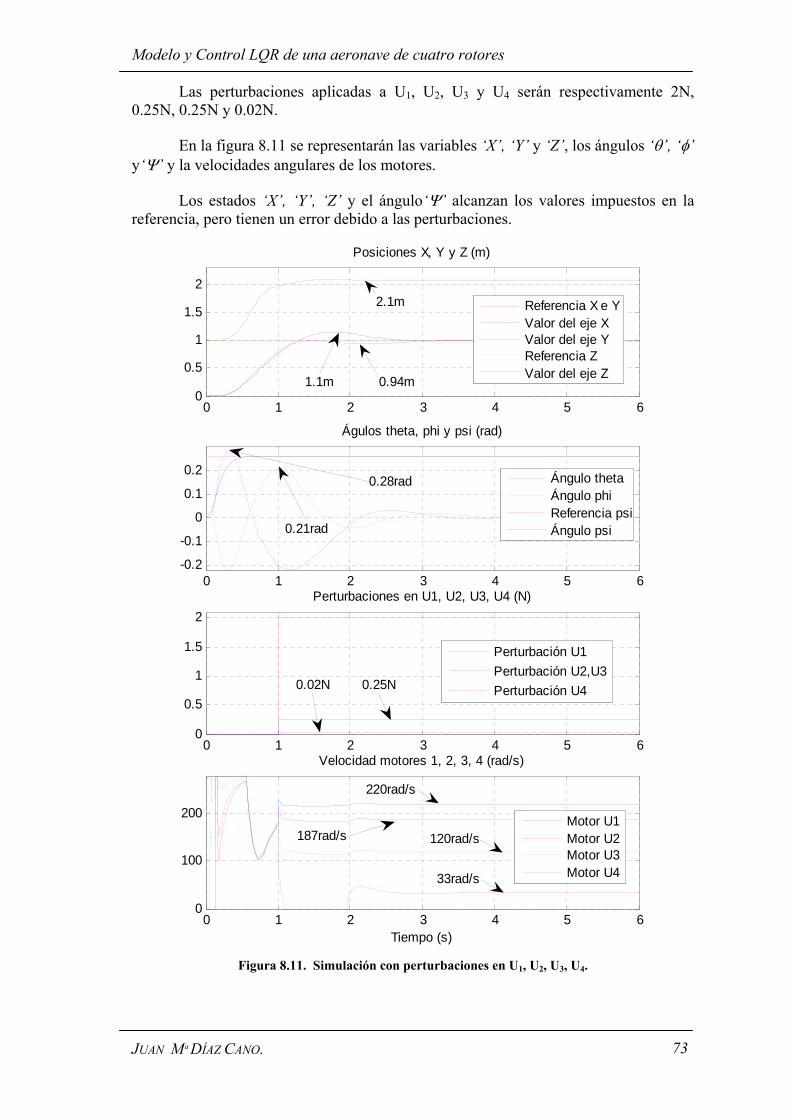
Modelo y Control LQR de una aeronave de cuatro rotores
JUAN Mª DÍAZ CANO. 73
Las perturbaciones aplicadas a U1, U2, U3 y U4 serán respectivamente 2N, 0.25N, 0.25N y 0.02N.
En la figura 8.11 se representarán las variables ‘X’, ‘Y’ y ‘Z’, los ángulos ‘θ’, ‘φ’ y‘Ψ’ y la velocidades angulares de los motores.
Los estados ‘X’, ‘Y’, ‘Z’ y el ángulo‘Ψ’ alcanzan los valores impuestos en la referencia, pero tienen un error debido a las perturbaciones.
0 1 2 3 4 5 60
0.5
1
1.5
2
Posiciones X, Y y Z (m)
Referencia X e YValor del eje XValor del eje YReferencia ZValor del eje Z
0 1 2 3 4 5 6-0.2
-0.1
0
0.1
0.2
Águlos theta, phi y psi (rad)
Ángulo thetaÁngulo phiReferencia psiÁngulo psi
0 1 2 3 4 5 60
0.5
1
1.5
2Perturbaciones en U1, U2, U3, U4 (N)
Perturbación U1Perturbación U2,U3Perturbación U4
0 1 2 3 4 5 60
100
200
Velocidad motores 1, 2, 3, 4 (rad/s)
Tiempo (s)
Motor U1Motor U2Motor U3Motor U4
0.02N 0.25N
220rad/s
187rad/s 120rad/s
33rad/s
0.21rad
0.28rad
2.1m
1.1m 0.94m
Figura 8.11. Simulación con perturbaciones en U1, U2, U3, U4.

Modelo y Control LQR de una aeronave de cuatro rotores
JUAN Mª DÍAZ CANO. 74
El eje ‘Z’ tiene un error de 10cm y los ejes ‘X’ e ‘Y’ presentan un error de 1cm, por lo que se encuentra dentro del intervalo de error permitido. Por último, el ángulo‘Ψ’ tiene un error de 0.01rad, por lo que se considera que también está estabilizado. El eje ‘Z’ presenta una Mp del 10%, mientras que el eje ‘X’ tiene una sobreoscilación del 6%. El ángulo ‘θ’ alcanza un valor máximo de 0.28 rad (16º) y el ángulo ‘φ’ toma el valor de -0.22rad, por ello el eje ‘Y’ tiene una sobreoscilación menor que el eje ‘X’. También decir que el ángulo ‘Ψ’ tiene un tr de 0.4s y un ts de 0.5s, el eje ‘X’ presenta un tr de 1.1s y un ts de 2.4s, en el eje ‘Y’ existe un tr de 1.1s y un ts de 2.6s y en el eje ‘Z’ tiene un tr de 0.85s.
8.3 Simulaciones con el Modelo completo.
El modelo que se simulará es el de la figura 8.12. En este caso está incluida la dinámica de los motores. Se cogerán como entradas cuatro señales de referencia ‘Xr’, ‘Yr’, ‘Zr’, ‘Ψr’, cuyos valores serán modificados con forma de escalón. Las salidas que se representan son ‘X’, ‘Y’, ‘Z’, ‘φ’, ‘θ’, ‘Ψ’.
Figura 8.12. Modelo completo con controlador LQR.
El controlador LQR escogido para estudiar el comportamiento en simulación, al igual que en el caso anterior, será el obtenido en el capítulo 7, apartado 7.3.
A este LQR se le aplicarán cambios en las señales de entrada de forma individual, donde los escalones aplicados serán de 0.5m de amplitud en las referencias ‘Xr’, ‘Yr’, ‘Zr’ y 0.26rad (15º) de amplitud en la referencia ‘Ψr’.
Posteriormente se realizarán unas simulaciones cambiando simultáneamente las referencias en varios ejes. También se estudiará cómo es el comportamiento del Quad-Rotor cuando se le aplica perturbaciones.
8.3.1 Cambio de la referencia en un eje.
Se comenzará variando las referencias de los ejes ‘Xr’, ‘Yr’, ‘Zr’, con amplitudes de 0.5m y la referencia ‘Ψr’ con amplitudes de 0.26rad (15º).
Se estudiará dos puntos de funcionamiento, el primero cuando el Quad-Rotor parta del punto inicial con los motores parados, ‘Z = 0’, y el segundo cuando el sistema se encuentre en un punto de trabajo con los motores funcionando, ‘Z > 0’.

Modelo y Control LQR de una aeronave de cuatro rotores
JUAN Mª DÍAZ CANO. 75
En estas simulaciones no se tiene en cuenta el efecto suelo, por tanto, la referencia ‘Z = 0’ sólo corresponde a una posición en la cual los motores están parados. Un resultado de Z < 0 indicaría que el Quad-Rotor no se levanta del suelo, pero en el primer punto de funcionamiento servirá para comprobar cómo afecta la dinámica de los motores en el despegue.
• Escogiendo como punto inicial todos los estados a cero.
Figura 8.13. Simulación cambiando la referencia del eje ‘Z’ en 0.5 metros.
En la figura 8.13 se muestra como el sistema parte de un punto inicial ‘Z = 0’ hasta el valor aplicado en la referencia (0.5 metros). El valor de la referencia lo alcanza en 0.9 segundos con el error del eje ‘Z’ a cero, el tiempo de subida y el de establecimiento será 0.6s y 0.7s respectivamente. El modelo completo tiene 0.1 segundo de retraso en comparación con el modelo reducido, figura 8.2. Además, en esta gráfica, se puede ver como los motores parten desde 0 rad/s y la saturación la alcanzan en 0.22 segundos. Así pues, la posición en el eje ‘Z’ cae 2 centímetros por debajo de cero. Este fenómeno ocurre debido a la dinámica de los motores, que no es capaz de entregar la velocidad de forma instantánea, hecho que si ocurría en el modelo reducido.
• Escogiendo como punto inicial todos los estados a cero y ‘Z = 1’.
En esta simulación se representará la posición del eje ‘X’, el ángulo ‘θ’, la posición del eje ‘Z’ y las velocidades de los motores.
En la figura 8.14, se describe el comportamiento del Quad-Rotor cuando se cambia la referencia en el eje X, pasando de la posición cero a 0.5 metros. El ángulo afectado en este desplazamiento (desplazamiento en el eje X) es θ y de forma indirecta

Modelo y Control LQR de una aeronave de cuatro rotores
JUAN Mª DÍAZ CANO. 76
también afecta a la posición ‘Z’, ya que la propulsión de los motores no es perpendicular al suelo y pierde fuerza de empuje el sistema.
El sistema en dos segundos alcanza la referencia sin oscilaciones, consiguiendo que el ángulo θ alcance un máximo de 0.16rad, algo más que en el modelo reducido. La posición ‘X’ presenta un tiempo de subida de 1.5s y un tiempo de establecimiento de 1.8s, valores superiores respecto del modelo reducido. La posición en el eje ‘Z’ desciende cuatro centímetros, existiendo una diferencia considerable entre el modelo reducido y el completo, debido principalmente a la dinámica de los motores y a que el ángulo ‘θ’ es superior. Otro dato interesante es que los motores no se saturan, consiguiendo una velocidad angular máxima de 247rad/s.
0 1 2 3 4 50
0.2
0.4
Posición X (m)
Referencia 0.5mValor del eje X
0 1 2 3 4 5-0.05
0
0.050.1
Águlo theta (rad)
0 0.5 1 1.5 2 2.5 3 3.5 4
0.96
0.98
1
Posición Z (m)
Referencia 1mValor del eje Z
0 0.5 1 1.50
100
200
Velocidad motores 1, 2, 3, 4 (rad/s)
Tiempo (s)
Motor U1Motor U2Motor U3Motor U4
0.16rad
201.7rad/s
0.06rad
247rad/s
Figura 8.14. Simulación cambiando la referencia del eje ‘X’ en 0.5 metros.
En la siguiente simulación se representará la posición del eje ‘Y’, el ángulo ‘φ’, la posición del eje ‘Z’ y las velocidades de los motores.
En la figura 8.15 se muestra el comportamiento del Quad-Rotor cuando se cambia la referencia en el eje ‘Y’, pasando de la posición cero a 0.5 metros. En este caso, el ángulo φ afecta al desplazamiento en el eje ‘Y’ y de forma indirecta, al igual

Modelo y Control LQR de una aeronave de cuatro rotores
JUAN Mª DÍAZ CANO. 77
que ocurría en la simulación anterior, también afecta a la posición ‘Z’, por el mismo motivo.
En la gráfica aparece un comportamiento similar al de la gráfica 8.14. Esto indica que el eje ‘X’ e ‘Y’ tienen un comportamiento similar, consiguiendo un tiempo de subida de 1.6s y un tiempo de establecimiento de 1.9s, llevando el ángulo ‘θ’ a un máximo de -0.12rad.
Al igual que pasa en el eje ‘X’, la posición en el eje ‘Z’ cae cuatro centímetros. Las velocidades angulares de los motores tienen un máximo en 250rad/s y no se saturan en ningún momento.
0 1 2 3 4 50
0.2
0.4
Posición Y (m)
Referencia 0.5mValor del eje Y
0 1 2 3 4 5
-0.1-0.05
00.05
Ángulo phi (rad)
0 1 2 3 4 50.96
0.98
1
Posición Z (m)
Referencia 1mValor del eje Z
0 0.5 1 1.50
100
200
Velocidad motores 1, 2, 3, 4 (rad/s)
Tiempo (s)
Motor U1Motor U2Motor U3Motor U4
0.05rad
201.7rad/s
-0.12rad
250rad/s
Figura 8.15. Simulación cambiando la referencia del eje ‘Y’ en 0.5 metros.
En esta última simulación se representará el ángulo ‘Ψ’, la posición del eje ‘Z’ y las velocidades de los motores.
En la figura 8.16 se representa el comportamiento del Quad-Rotor cuando se cambia la referencia en el eje Ψ (eje de giro sobre sí mismo), pasando de la posición inicial cero a 0.26 radianes. En este caso, el ángulo ‘Ψ’ afecta de forma indirecta a la posición ‘Z’. En esta simulación sucede esto porque, para girar sobre sí mismo, hay

Modelo y Control LQR de una aeronave de cuatro rotores
JUAN Mª DÍAZ CANO. 78
motores que bajan su velocidad y no se ejerce la fuerza de empuje necesaria para mantener la altura.
El modelo alcanza la referencia de 0.26rad en 0.9 segundos, teniendo un tr de 0.45s y un ts de 0.5, igual que ocurría con el modelo reducido, pero comparando el eje ‘Z’ de la gráfica 8.16 y el de la gráfica 8.5, en el modelo completo el eje ‘Z’ desciende 12cm mientras que en el reducido sólo desciende 6mm, debido a la dinámica de los motores.
Las velocidades angulares de los motores U2 y U4 tienen el mismo valor que U1 y U3 en la figura 8.14. Comparando las gráficas de los motores en el modelo completo y reducido, existe un comportamiento diferente puesto que en el modelo completo los motores pasan por los dos extremos, 278rad/s y 6rad/s, para luego estabilizarse y en el modelo reducido los motores pasan de 278rad/s a la velocidad de equilibrio, 201.7rad/s. Otra diferencia es que en el modelo completo los motores tienen una velocidad mínima de 6rad/s.
0 0.5 1 1.50
0.1
0.2
Ángulo PSI (rad)
Referencia 0.26radValor del eje PSI
0 0.5 1 1.50.85
0.9
0.95
1
Posición Z (m)
Referencia 1mValor del eje Z
0 0.5 1 1.50
100
200
Velocidad motores 1, 2, 3, 4 (rad/s)
Tiempo (s)
Motor U1Motor U2Motor U3Motor U4
278rad/s
6rad/s
0.88m
Figura 8.16. Simulación cambiando la referencia del ángulo’Ψ’ en 0.26 radianes (15º).

Modelo y Control LQR de una aeronave de cuatro rotores
JUAN Mª DÍAZ CANO. 79
8.3.2 Cambio de la referencia en varios ejes.
Se realizarán dos simulaciones en las cuales se variarán de forma simultánea las referencias de las entradas ‘Xr’, ‘Yr’, ‘Zr’ con amplitudes de 0.75m, 1m, 1m y la referencia ‘Ψr’ con amplitudes de 0.26rad (15º).
• Escogiendo como punto inicial todos los estados a cero y ‘Z = 1’.
En esta simulación se representará las posiciones de los ejes ‘X’ e ‘Y’, los ángulos ‘θ’, ‘φ’ y‘φ’, la posición del eje ‘Z’ y las velocidades de los motores.
En la figura 8.17 se muestra el resultado de esta simulación. Hay que recordar que el controlador que se usa en las simulaciones está diseñado para escalones de 0.5m en los ejes ‘X’, ‘Y’, ‘Z’ y un escalón de 0.1rad en el ángulo‘Ψ’. En esta simulación se aplican escalones de referencias superiores a las utilizadas en el diseño, por ello pueden existir variaciones en el comportamiento del sistema.
En las gráficas se muestra que el sistema se estabiliza manteniendo los errores a cero en cuatro segundos, al igual que ocurría en el modelo reducido, figura 8.5. Al estudiar los tiempos de establecimiento y de subida se obtienen. En el caso del eje ‘Z’, tiene un tr de 1s y un ts de 1.2s, el eje ‘Ψ’ presenta un tr de 0.4s y un ts de 0.5s y en los ejes ‘X’ e ‘Y’ aparecen unas sobreoscilaciones del 15% y del 2% respectivamente. Esta es una de las primeras diferencias que se presenta en el modelo completo respecto al modelo reducido.
Los tiempos de subida y establecimiento en el eje ‘X’ son 1.1s y 2.3s, en el caso del eje ‘Y’ los tiempos de subida y establecimiento son 1.3s y 1.4s. Existe una ligera diferencia en los ángulos ‘φ’ y ‘θ’, ya que en el modelo completo alcanza un máximo de 0.28rad y en el reducido alcanzaba 0.23rad. El ángulo ‘Ψ’ es el más rápido, seguido del eje ‘Z’.
Hay que notar que la posición ‘Z’ desciende 6cm y en el modelo reducido el descenso era de 1mm, esto es debido a la dinámica de los motores principalmente y al valor de los ángulos ‘φ’ y ‘θ’. La gráfica de las velocidades de los motores difiere de la figura 8.5 (modelo reducido) en el comportamiento de las velocidades, al existir más cambios de velocidad en los primeros 0.7s, existiendo una similitud a partir de ahí.

Modelo y Control LQR de una aeronave de cuatro rotores
JUAN Mª DÍAZ CANO. 80
0 1 2 3 4 5 60
0.5
1
Posición X e Y (m)
Referencia XValor del eje XReferencia YValor del eje Y
0 1 2 3 4 5 6
-0.2
0
0.2
Águlo theta, phi, psi (rad)
Ángulo thetaÁngulo phiReferencia psiÁngulo psi
0 1 2 3 4 5 61
1.5
2
Posición Z (m)
ReferenciaValor del eje Z
0 0.2 0.4 0.6 0.8 1 1.2 1.4 1.6 1.8 20
100
200
Velocidad motores 1, 2, 3, 4 (rad/s)
Tiempo (s)
Motor U1Motor U2Motor U3Motor U4
0.9m1.02m
-0.28rad
0.28rad
0.94m
278rad/s
2rad/s
Figura 8.17. Simulación cambiando las cuatro referencias de forma simultánea.
8.3.3 Perturbaciones mantenidas.
Se simulará el Quad-Rotor aplicando de forma independiente perturbaciones que afectarán a las fuerzas de empuje U1, U2, U3 y U4. En el capítulo 2, ecuación 2.24, se obtuvieron las fuerzas de empujes máximas y mínimas que puede entregar el sistema propulsor. Teniendo en cuenta estos datos se calcularán las perturbaciones que se aplicarán.
Para realizar estas simulaciones, se partirá de un punto inicial donde todos los estados son cero y el eje ‘Z‘ será un metro; como punto final se marcará una referencia de ‘Xr’, ‘Yr’ y ‘Zr’ un escalón de amplitud 0.5m y el ángulo‘Ψr’ una referencia de 0.1rad.

Modelo y Control LQR de una aeronave de cuatro rotores
JUAN Mª DÍAZ CANO. 81
• Perturbaciones en la fuerza U1.
La fuerza U1 afecta principalmente al eje ‘Z’ y tiene unos límites de 0N el mínimo y 9.67N como máximo. En esta simulación se aplicará una perturbación de 4N y -3N.
Como se ve en la figura 8.18, y al igual que sucedía en el modelo reducido de la figura 8.7, el controlador LQR diseñado no es capaz de rechazar las perturbaciones y aparece un error en la posición, pero el sistema no se vuelve inestable en ningún momento.
El comportamiento del eje ‘Z’ es igual en ambos modelos con la diferencia de que el error en dicho eje es 1mm mayor que en el modelo reducido. En la gráfica de las velocidades existen diferencias, puesto que en el modelo completo no existen cambios bruscos de velocidades de los motores, fenómeno que si se da en el modelo reducido. Otro dato es que, en la figura 8.18, los motores sólo se saturan durante 20ms y en el modelo reducido se saturan durante 0.3 segundos.
0 1 2 3 4 5 6 71
1.2
1.4
1.6
Posición Z (m)
ReferenciaValor del eje Z
0 1 2 3 4 5 6 7-4
-2
0
2
4Perturbación en U1 (N)
0 1 2 3 4 5 6 70
100
200
Velocidad motores 1, 2, 3, 4 (rad/s)
Tiempo (s)
Motor U1Motor U2Motor U3Motor U4
-3N
201.7rad/s 254rad/s
93rad/s
278rad/s
1.62m
1.41m
Figura 8.18. Simulación con perturbaciones en U1.

Modelo y Control LQR de una aeronave de cuatro rotores
JUAN Mª DÍAZ CANO. 82
• Perturbaciones en la fuerza U2.
La fuerza U2 afecta directamente al eje ‘Y’ y los límites de saturación son -0.57N el mínimo y 0.57N como máximo. Para realizar la simulación se aplicará una perturbación de 0.5N y -0.3N.
En esta simulación se ha tenido que alargar el tiempo de simulación y la duración de la perturbación para que el error de posición debida a ésta sea visible en la gráfica.
En la figura 8.19 se comprueba que en el momento que se aplica la perturbación, la posición del eje ‘Y’ se ve afectada y hasta el tercer segundo no se estabiliza, apareciendo el error en la posición de 2cm por debajo de la referencia. En el instante que cambia el valor de la perturbación en el cuarto segundo, aparece un transitorio y en dos segundos se estabiliza, manteniendo otro error en la posición de 1cm por arriba de la referencia.
En la figura 8.8, en el modelo reducido, cuando se aplica la perturbación, el eje ‘Y’ no se ve afectado en el transitorio y sólo aparece el error en la posición. Las velocidades de los motores en el modelo completo presentan unas oscilaciones con cada cambio de perturbación. Este efecto no ocurría en el modelo reducido.
0 1 2 3 4 5 6 70
0.2
0.4
Posición Y (m)
Referencia de 0.5mValor del eje Y
0 1 2 3 4 5 6 7-0.5
0
0.5Perturbación en U2 (N)
0 1 2 3 4 5 6 70
100
200
Velocidad motores 1, 2, 3, 4 (rad/s)
Tiempo (s)
Motor U1Motor U2Motor U3Motor U4
-0.3N
0.48m0.51m
273rad/s
201rad/s
82rad/s
247rad/s
142rad/s
Figura 8.19. Simulación con perturbaciones en U2.

Modelo y Control LQR de una aeronave de cuatro rotores
JUAN Mª DÍAZ CANO. 83
• Perturbaciones en la fuerza U3.
La fuerza U3 afecta directamente al eje ‘X’ y los límites de saturación son -0.57N el mínimo y 0.57N como máximo.
El comportamiento de los ejes ‘X’ e ‘Y’ y los límites de fuerza de empuje son iguales, por tanto la simulación del eje ‘X’ debería salir igual a la del eje ‘Y’, la única variación sería que los motores afectados son U1 y U3.
Pero esto sería así si no cambiásemos la referencia del ángulo ‘Ψ’, como en este caso la referencia ‘Ψr’ es 0.1rad aparece en el eje ‘X’ una sobreoscilación. La sobreoscilación es aún mayor porque existe una perturbación que hace que el Quad-rotor se desplace en el sentido positivo del eje ‘X’, con una Mp del 12%. Al aplicar las perturbaciones aparecen un error de 1cm, valor que está dentro de los límites de error para considerar que el sistema está estabilizado.
0 1 2 3 4 5 6 70
0.2
0.4
0.6
Posición X (m)
Referencia de 0.5mValor del eje X
0 1 2 3 4 5 6 7-0.5
0
0.5Perturbación en U3 (N)
0 1 2 3 4 5 6 70
100
200
Velocidad motores 1, 2, 3, 4 (rad/s)
Tiempo (s)
Motor U1Motor U2Motor U3Motor U4
-0.3N
0.51m0.49m
273rad/s
201rad/s
82rad/s
247rad/s
142rad/s
Figura 8.20. Simulación con perturbaciones en U3.
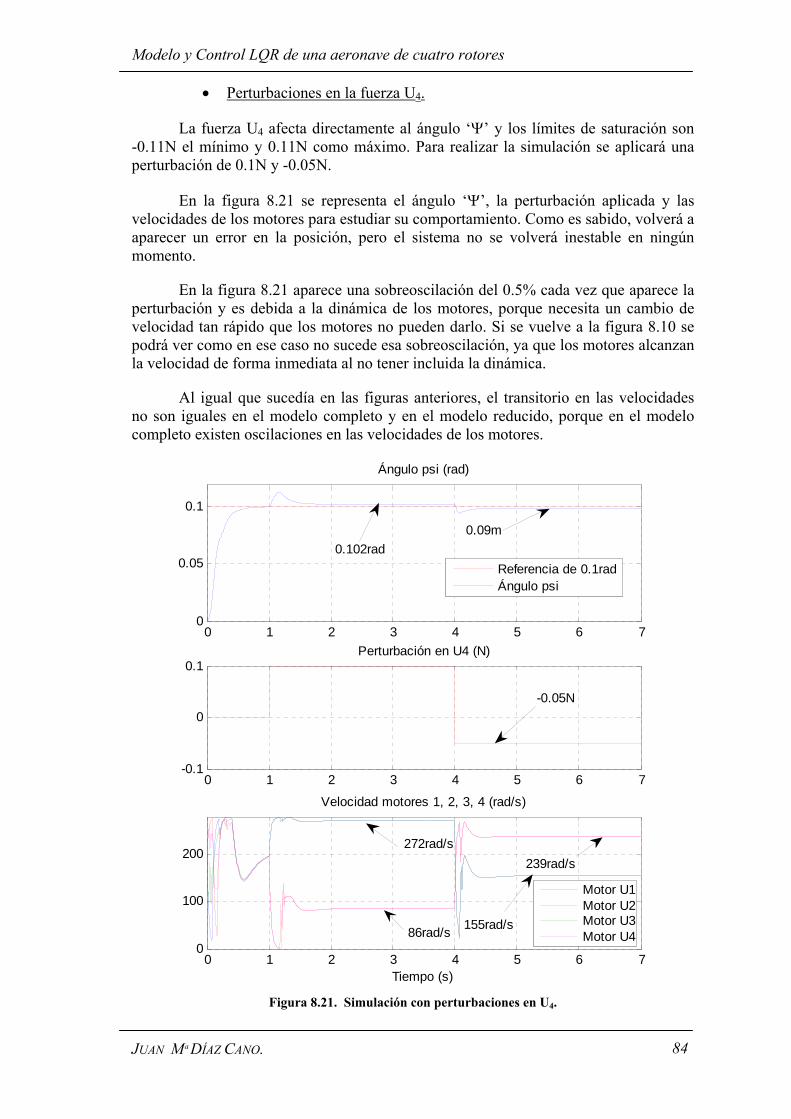
Modelo y Control LQR de una aeronave de cuatro rotores
JUAN Mª DÍAZ CANO. 84
• Perturbaciones en la fuerza U4.
La fuerza U4 afecta directamente al ángulo ‘Ψ’ y los límites de saturación son -0.11N el mínimo y 0.11N como máximo. Para realizar la simulación se aplicará una perturbación de 0.1N y -0.05N.
En la figura 8.21 se representa el ángulo ‘Ψ’, la perturbación aplicada y las velocidades de los motores para estudiar su comportamiento. Como es sabido, volverá a aparecer un error en la posición, pero el sistema no se volverá inestable en ningún momento.
En la figura 8.21 aparece una sobreoscilación del 0.5% cada vez que aparece la perturbación y es debida a la dinámica de los motores, porque necesita un cambio de velocidad tan rápido que los motores no pueden darlo. Si se vuelve a la figura 8.10 se podrá ver como en ese caso no sucede esa sobreoscilación, ya que los motores alcanzan la velocidad de forma inmediata al no tener incluida la dinámica.
Al igual que sucedía en las figuras anteriores, el transitorio en las velocidades no son iguales en el modelo completo y en el modelo reducido, porque en el modelo completo existen oscilaciones en las velocidades de los motores.
0 1 2 3 4 5 6 70
0.05
0.1
Ángulo psi (rad)
Referencia de 0.1radÁngulo psi
0 1 2 3 4 5 6 7-0.1
0
0.1Perturbación en U4 (N)
0 1 2 3 4 5 6 70
100
200
Velocidad motores 1, 2, 3, 4 (rad/s)
Tiempo (s)
Motor U1Motor U2Motor U3Motor U4
-0.05N
0.102rad0.09m
272rad/s
86rad/s
239rad/s
155rad/s
Figura 8.21. Simulación con perturbaciones en U4.

Modelo y Control LQR de una aeronave de cuatro rotores
JUAN Mª DÍAZ CANO. 85
• Perturbaciones en la fuerza U1, U2, U3, U4.
Para terminar este bloque, al igual que en el apartado anterior, se realizará una simulación donde se aplique perturbaciones en todas las variables de empuje Ui y se aumentarán los escalones de referencias a todas las variables, ‘Xr’ e ‘Yr’ un escalón de amplitud 1m, a ‘Zr’ un escalón de 2m y el ángulo‘Ψr’ una referencia de 0.26rad. De esta forma se comprobará cómo se comporta el control LQR cuando se le exige el máximo.
Las perturbaciones aplicadas a U1, U2, U3 y U4 serán respectivamente 1N, 0.25N, 0.25N y 0.02N.
En la figura 8.22 se representarán las variables ‘X’, ‘Y’ y ‘Z’, los ángulos ‘θ’, ‘φ’ y‘Ψ’ y la velocidades angulares de los motores.
0 2 4 6 8 10 12 14
-0.2
0
0.2
Águlo theta, phi, psi (rad)
0 2 4 6 8 10 12 140
1
2Perturbación en U1, U2, U3, U4 (N)
0 2 4 6 8 10 12 140
100
200
Velocidad motores 1, 2, 3, 4 (rad/s)
Tiempo (s)
0 2 4 6 8 10 12 140
1
2
3
Posición X, Y, Z (m)
Referencia X e YValor del eje XValor del eje YReferencia ZValor del eje Z
Ángulo thetaÁngulo phiReferencia psiÁngulo psi
Perturbación U1Perturbación U2,U3Perturbación U4
Motor U1Motor U2Motor U3Motor U4
2.1m.
1.01m
0.9m
-0.28rad
0.35rad
0.25N0.02N
219rad/s
187rad/s
32rad/s 120rad/s
0.2604rad
Figura 8.22. Simulación con perturbaciones en U1, U2, U3, U4.

Modelo y Control LQR de una aeronave de cuatro rotores
JUAN Mª DÍAZ CANO. 86
Los estados ‘X’, ‘Y’, ‘Z’ y el ángulo‘Ψ’ alcanzan los valores impuestos en la referencia, pero tienen un error debido a las perturbaciones. Los ángulos alcanzan un valor máximo de 0.35 rad (20º) y en 8 segundos el Quad-Rotor está estabilizado.
En la figura 8.22 se aprecia que el comportamiento del Quad-Rotor es diferente del modelo reducido, figura 8.11. El eje más afectado es el ‘Z’, ya que para alcanzar la referencia de 2m el sistema presenta una sobreoscilación del 150%, alcanzando un máximo de 3.5m. Con el eje ‘Y’ no aparece sobreoscilación, pero no alcanza el valor de referencia hasta los nueve segundos. El eje ’X’ es el más rápido en alcanzar la referencia, apareciendo una sobreoscilación del 9%. Lo mismo ocurre en el ángulo ‘Ψ’, donde la sobreoscilación es del 2% y se mantiene hasta que se estabiliza en ocho segundos.
Estos efectos no aparecían en el modelo reducido, figura 8.11, porque los motores alcanzan la velocidad de forma instantánea. Las velocidades angulares de los motores en ambas figuras, 8.22 que corresponde al modelo completo y 8.11 al modelo reducido, no toman los mismos valores, ya que en el primer segundo aparecen muchas oscilaciones para acabar estabilizándose a los 8s.
8.4 Conclusión.
Tras observar las distintas simulaciones en ambos modelos (completo y reducido), se llega a la conclusión que el modelo más óptimo para realizar posteriores estudios es el modelo completo, ya que al simplificar el modelo del Quad-Rotor eliminando la dinámica de los motores, se pierde mucha información importante que es de importancia, porque el comportamiento del Quad-Rotor reducido es muy diferente respecto al modelo completo.
El controlador LQR que se ha estudiado en este capítulo estaba diseñado para escalones de amplitud 0.5m en el caso de los ejes ‘Z’, ‘X’ e ‘Y y de 0.1rad en el caso del ángulo ‘Ψ’ y tras someter dicho control a varias simulaciones tiene un comportamiento aceptable cuando se saca de su zona de trabajo, porque sigue consiguiendo que el sistema sea rápido a la hora de alcanzar la referencia impuesta y no se vuelva inestable.

Modelo y Control LQR de una aeronave de cuatro rotores
JUAN Mª DÍAZ CANO. 87
9 Capítulo. Simulaciones del control LQR selectivo.
9.1 Introducción.
En este capítulo se utilizarán los controladores LQR diseñados en el capítulo 7, sección 7.4. El control selectivo está diseñado para seleccionar un controlador entre varios, dependiendo de la amplitud del error en los ejes ‘X’, ‘Y’, ‘Z’, ‘Ψ’.
La elección del controlador se realiza por medio de una función m ’sele_km.m’, la cual recibe como entradas los errores de los estados controlados y devuelva el índice de la matriz 3D de ganancias. En las siguientes figuras se muestran cuáles son los criterios de elección de los índices de las matrices según la amplitud del error de entrada, para amplitudes positivas y negativas respectivamente.
• Eje ‘X’ e ‘Y’.
• Eje ‘Z’.

Modelo y Control LQR de una aeronave de cuatro rotores
JUAN Mª DÍAZ CANO. 88
• Eje ‘Ψ’.
En este caso el controlador LQR se diseñó para seis amplitudes de escalones
diferentes, tres positivos y otros tres negativos.
Las simulaciones se realizarán sobre los dos modelos de Quad-Rotor mencionados en el capítulo 4 (Modelo reducido y Modelo completo). También se comprobará la robustez del controlador ante perturbaciones y el comportamiento de ambos modelos, debiendo existir diferencias entre ellos, porque la dinámica de los motores tiene influencia sobre el modelo del Quad-Rotor, como se pudo comprobar en el capítulo anterior.
9.2 Simulaciones con el Modelo reducido.
El modelo que se simulará es el de la figura 9.1. Se escogerán como entradas cuatro señales de referencia ‘Xr’, ‘Yr’, ‘Zr’, ‘Ψr’ cuyos valores serán modificados con forma de escalón. Las salidas que se representan son ‘X’, ‘Y’, ‘Z’, ‘φ’, ‘θ’, ‘Ψ’.
Figura 9.1. Modelo reducido con controlador LQR.
El controlador LQR escogido para estudiar el comportamiento en simulación será el obtenido en el capítulo 7, apartado 7.4. A este LQR se le aplicarán cambios en las señales de entrada de forma individual y escalonada, donde los escalones aplicados serán de 0.6m, 1m y 1.5m de amplitud en las referencias ‘‘Xr’, ‘Yr’, ‘Zr’ y 0.2rad (11.4º) y 1.57rad (90º) de amplitud en la referencia ‘Ψr’. Estos escalones se aplicarán

Modelo y Control LQR de una aeronave de cuatro rotores
JUAN Mª DÍAZ CANO. 89
con un retardo de 3 segundos, tiempo suficiente para que el estado afectado por el escalón se estabilice.
Posteriormente, se realizarán unas simulaciones cambiando simultáneamente las referencias en varios ejes. Así pues, se estudia en el punto siguiente cómo se comporta el controlador LQR ante perturbaciones.
9.2.1 Cambio de la referencia en un eje.
Se comenzará variando las referencias de los ejes ‘Xr’, ‘Yr’, con escalones de 0.6m y 1m, en el caso del eje ‘Zr’ se aplicarán escalones de 0.6m, 1.5m y la referencia ‘Ψr’ se variará con amplitudes de 0.5rad y 0.8rad.
• Escogiendo como punto inicial todos los estados a cero.
0 1 2 3 4 5 6 70
0.5
1
1.5
2Posición Z (m)
Eje "Z"Referencia
0 1 2 3 4 5 6 71
1.5
2
2.5
3Selector e índices de matrices
SelectorÍndice
0 1 2 3 4 5 6 70
100
200
300Velocidad motores 1, 2, 3, 4 (rad/s)
Tiempo (s)
Motor U1Motor U2Motor U3Motor U4139rad/s
1.5m
0.6m
Figura 9.2. Simulación cambiando la referencia del eje ‘Z’ en 0.5 metros.

Modelo y Control LQR de una aeronave de cuatro rotores
JUAN Mª DÍAZ CANO. 90
En la figura 9.2 se muestra como el sistema pasa de un punto inicial ‘Z = 0’ al valor de referencia (0.6 metros) en un tiempo tr = 0.51s y ts = 0.59s, empezando el selector en la posición uno, correspondiente al eje ‘Z’. El valor del índice comienza con el valor dos para terminar con el valor uno cuando el error es cero. Al cambiar la referencia a 1.5 metros, el selector sigue con el valor uno (eje ‘Z’) y el índice pasa por los valores tres, dos y finalmente uno cuando está estabilizado. Para esta referencia los tiempos de subida y de establecimiento son los siguientes: tr = 0.57s y ts = 0.64s
En la gráfica de las velocidades se observa como la velocidad de los motores pasan de cero a saturación 278 rad/s en cero segundos, característica que no ocurrirá en las simulaciones del modelo completo, al tener incorporada la dinámica de los motores.
• Escogiendo como punto inicial todos los estados a cero y ‘Z = 1’.
En esta simulación se representará la posición del eje ‘X’, el ángulo ‘θ’, la posición del eje ‘Z’, el selector e índice de las matrices y las velocidades de los motores.
En la figura 9.3, se aprecia el comportamiento del Quad-Rotor cuando se cambia la referencia en el eje ‘X’, pasando de la posición cero a 0.6 metros y a 1.5 metros a los dos segundos de aplicar cada referencia. El ángulo afectado en este desplazamiento (desplazamiento en el eje ‘X’) es ‘θ’, y de forma indirecta también afecta a la posición ‘Z’, ya que la propulsión de los motores no es perpendicular al suelo y el sistema pierde fuerza de empuje.
El sistema en dos segundos alcanza la primera referencia, manteniendo el error a cero, con un tiempo de subida de 1.38s y un tiempo de establecimiento de 1.54. De nuevo, tardará dos segundos en alcanzar la segunda referencia sin aparecer oscilaciones en ambos casos y consiguiendo un tiempo de subida de 1.38s y un tiempo de establecimiento de 1.51, consiguiendo que el ángulo ‘θ’ alcance un máximo de 0.15rad y 22rad en el segundo caso.
El selector empieza aplicando el control optimizado para el eje ‘X’ (selector = 2) hasta que alcanza la referencia, en cuyo caso el control que se aplica es el del eje ‘Z’, que está puesto como predeterminado.
El índice de la matriz de ganancias cuando el error del eje ‘X’ es menor o igual que 0.6 comienza escogiendo el controlador para amplitudes de 0.5m. Cuando se aplica la segunda referencia de amplitud 1.1m, el índice comienza con un control para amplitudes de 0.75m (índice = 3).
En el momento que el error del eje ‘X’ sea menor de 0.6m, el control será igual que para referencias de amplitud 0.6m (índice = 2) y, posteriormente, cuando el error baje de 0.4m, el control que se aplicará será el correspondiente a amplitudes de 0.25m (índice = 1).
Hay que aclarar que el selector cambia del valor 2 al 1 antes de que el error en el eje ‘X’ sea cero, debido al criterio que se ha escogido para seleccionar el control de ejes en cada momento, ya que el selector puede cambiar de control cuando el error sea menor de 0.1m para el eje ‘X’.

Modelo y Control LQR de una aeronave de cuatro rotores
JUAN Mª DÍAZ CANO. 91
Como se dijo al comienzo, el eje ‘Z’ también se ve afectado, pero como no hay dinámica en los motores, el efecto que produce en el eje ‘Z’ es mínimo, en este caso el descenso es de 3 milímetro. La velocidad angular del motor U3 se mantiene saturada durante 16ms en la primera referencia y 25ms en la segunda.
0 1 2 3 4 5 6 70
1
2Posición X (m)
Eje "X"Referencia
0 1 2 3 4 5 6 71
2
3Selector e índices de matrices
SelectorÍndice
0 1 2 3 4 5 6 7-0.2
0
0.2
Ángulo Theta (rad)
0 1 2 3 4 5 6 7
0.996
0.998
1
Posición Z (m)
Eje "Z"Referencia 1m
0 1 2 3 4 5 6 70
100
200
300Velocidad motores 1, 2, 3, 4 (rad/s)
Tiempo (s)
Motor U1Motor U2Motor U3Motor U4
1.5m
0.6m
201.7rad/s
278rad/s
0.14rad 0.22rad
-0.1rad
Figura 9.3. Simulación cambiando la referencia del eje ‘X’ en 0.6 y 1.5 metros.
En la siguiente simulación se representará la posición del eje ‘Y’, el ángulo ‘φ’, la posición del eje ‘Z’, el selector e índice de las matrices y las velocidades de los motores.
En la figura 9.4, se describe el comportamiento del Quad-Rotor cuando se cambia la referencia en el eje ‘Y’, pasando de la posición cero a 0.6 metros y de la

Modelo y Control LQR de una aeronave de cuatro rotores
JUAN Mª DÍAZ CANO. 92
posición 0.6m a 1.5 metros. El ángulo ‘φ’ afecta al desplazamiento en el eje ‘Y’ y de forma indirecta, al igual que ocurría en el caso anterior, también afecta a la posición ‘Z’ por el mismo motivo.
0 1 2 3 4 5 6 70
1
2Posición Y (m)
Eje "Y"Referencia
0 1 2 3 4 5 6 71
2
3Selector e índices de matrices
SelectorÍndice
0 1 2 3 4 5 6 7
-0.2
0
0.2Ángulo Phi (rad)
0 1 2 3 4 5 6 7
0.998
1
Posición Z (m)
Eje "Z"Referencia 1m
0 1 2 3 4 5 6 70
100
200
300Velocidad motores 1, 2, 3, 4 (rad/s)
Tiempo (s)
Motor U1Motor U2Motor U3Motor U4
1.5m
0.6m
201.7rad/s
278rad/s
-0.14rad -0.22rad
0.1rad
0.997m
Figura 9.4. Simulación cambiando la referencia del eje ‘Y’ en 0.6 y 1.5 metros.
Como se ha ido comentando a lo largo de este proyecto, el comportamiento del eje ‘X‘ es idéntico al eje ‘Y’, alcanzado ambas referencias en dos segundos y teniendo los mismos tiempos de subida y establecimiento. Además consigue que el ángulo ‘φ’ alcance un mínimo de -0.14rad y -0.22rad, como sucedía en el caso del eje ‘X’.
En la referencia de 0.6m el selector toma el valor tres, correspondiendo este valor al eje ‘Y’ y seguirá con este valor hasta que el error en el eje ‘Y’ sea menor de

Modelo y Control LQR de una aeronave de cuatro rotores
JUAN Mª DÍAZ CANO. 93
0.01m, momento en el que el selector conmuta al valor 1, controlando a partir de ese instante el eje ‘Z’. Este será el mismo comportamiento que aparecerá cuando se aplique la segunda referencia de 1.5m.
La precisión que tiene el eje ‘X’ a la hora de conmutar el selector es de 0.05m y la del eje ‘Y’ tiene una precisión de 0.01m, siendo ambas diferentes para evitar oscilaciones en el selector entre el eje ‘X’ e ‘Y’.
El eje ‘Z’ también se ve afectado, apareciendo un descenso de 3mm cuando se aplica la referencia de 1.5m. En este caso, el motor que se satura será U2, que permanece saturado durante 16ms en la primera referencia y 25ms en la segunda.
En esta última simulación se representará el ángulo ‘Ψ’, la posición del eje ‘Z’, el selector e índices de las matrices de ganancias y las velocidades de los motores.
0 1 2 3 4 5 6 70
0.2
0.4
0.6
0.8Ángulo Psi (rad)
Angulo "PSI"Referencia
0 1 2 3 4 5 6 71
2
3
4Selector e índices de matrices
SelectorÍndice
0 1 2 3 4 5 6 70.97
0.98
0.99
1
Posición Z (m)
Eje "Z"Referencia 1m
0 1 2 3 4 5 6 70
100
200
300Velocidad motores 1, 2, 3, 4 (rad/s)
Tiempo (s)
Motor U1Motor U2Motor U3Motor U4
201.7rad/s
0.8rad
0.5rad
Figura 9.5. Simulación cambiando la referencia del ángulo’Ψ’ en 0.2 y 1.57 radianes (15º, 90º).
En la figura 9.5 se representa el comportamiento del Quad-Rotor cuando se cambia la referencia en el eje ‘Ψ’ (eje de giro sobre sí mismo), pasando de la posición

Modelo y Control LQR de una aeronave de cuatro rotores
JUAN Mª DÍAZ CANO. 94
inicial cero a 0.5 radianes, teniendo un tr de 0.44s y un ts de 0.54s. Al eje ‘Z’ le afecta el cambio en el ángulo ‘Ψ’, sufriendo un descenso de 22cm.
El selector para este eje tiene una precisión de 0.01rad y el valor que toma es cuatro, mientras que el error del eje ‘Ψ’ sea mayor que la precisión, instante en el cual el selector conmutará al valor uno. Como la amplitud del escalón es de 0.2rad y es menor que 0.25rad, el índice toma el valor 2, que corresponde al controlador optimizado para amplitudes de 0.17rad. En el instante que el error del eje ‘Ψ’ baje de 0.1 rad, el índice conmutará al controlador para amplitudes de 0.08rad (índice = 1).
Para la segunda referencia aplicada, el comportamiento del selector es igual que en la referencia anterior, comenzando con un valor de cuatro y terminando con el valor uno cuando el error es menor que 0.001rad. Las conmutaciones que sufre la variable índice comienza con el valor tres debido a que la amplitud del escalón es mayor de 0.25rad y escoge el control calculado para la amplitud 0.35rad, seguido del valor dos cuando el error esté entre 0.1rad y 0.25 y terminando en el valor uno para errores por debajo de 0.1rad. Los tiempos de subida y de establecimiento que presentan el Quad-Rotor con esta referencia son los siguientes: tr de 0.41s y un ts de 0.5s.
En este caso en el eje ‘Z’ se aprecia un descenso de 0.8cm, porque para girar sobre sí mismo hay motores que bajan su velocidad y no se ejerce la fuerza de empuje necesaria para mantener la altura.
Las velocidades angulares de los motores U2 y U4 se saturan durante 0.19 segundos y los motores U1 y U3 se paran, en la primera referencia y en la segunda referencia U2 y U4 se saturan durante 0.137s.
9.2.2 Cambio de la referencia en varios ejes.
Se realizará una simulación donde se variará de forma simultánea las referencias de entradas ‘Xr’, ‘Yr’, ‘Zr’ con amplitudes de 0.75m, 1m, 1m respectivamente y la referencia ‘Ψr’ con amplitud de 0.26rad (15º).
• Escogiendo como punto inicial todos los estados a cero y ‘Z = 1’.
En esta simulación se representará las posiciones de los ejes ‘X’, ‘Y’ y ‘Z’, los ángulos ‘θ’, ‘φ’ y‘φ’, el selector e índices de las matrices de ganancias y las velocidades de los motores.
En la figura 9.6 se muestra el resultado de esta simulación. En esta simulación se aplican escalones de referencias superiores a las utilizadas en el diseño, por ello pueden existir variaciones en el comportamiento del sistema.
En las gráficas se muestra que el sistema se estabiliza en tres segundos, permaneciendo los errores a cero. El ángulo ‘Ψ’ es el más rápido con un tr = 0.34s y ts = 0.4s, seguido del eje ‘Z’ con un tr = 0.86s y ts = 0.97s. El comportamiento de estos dos ejes, ‘Z’ y ‘Ψ’, son idénticos a las gráficas anteriores, pero en los ejes ‘X’ e ‘Y’ el comportamiento varía, ya que aparece una sobreoscilación del 11% y del 1% respectivamente. Esta sobreoscilación es debido al control escogido por el selector, ya que comienza usando el control optimizado para el eje ‘Z’ hasta que el error es menor

Modelo y Control LQR de una aeronave de cuatro rotores
JUAN Mª DÍAZ CANO. 95
que 0.1m. Posteriormente el selector cambia para controlar el eje ‘X’ y por último al eje ‘Y’, pero la sobreoscilación en el eje ‘X’ es debida al esfuerzo que necesita el control para mantener el ángulo ‘Ψ’ en la referencia impuesta. Los tiempos de subida y de establecimiento en el eje ‘X’ son respectivamente tr = 1.14s y ts = 1.2s, y en el eje ‘Y’ serán tr = 1.1.4s y ts = 1.23s.
0 1 2 3 4 5 6 70
0.5
1
1.5
2Posición X, Y y Z (m)
Eje "X"Referencia XEje "Y"Referencia YEje "Z"Referencia Z
0 1 2 3 4 5 6 71
2
3
4Selector e índices de matrices
SelectorÍndice
0 1 2 3 4 5 6 7
-0.2
-0.1
0
0.1
0.2
Ángulo Theta, Phi y Psi (rad)
Ángulo ThetaÁngulo PhiÁngulo PsiReferencia Psi
0 1 2 3 4 5 6 70
100
200
300Velocidad motores 1, 2, 3, 4 (rad/s)
Tiempo (s)
Motor U1Motor U2Motor U3Motor U4
2m
0.86m
1m
0.75m
0.26rad
41.2rad/s
Figura 9.6. Simulación cambiando las cuatro referencias de forma simultánea.
9.2.3 Perturbaciones mantenidas.
Se simulará el Quad-Rotor aplicando de forma independiente perturbaciones que afectarán a las fuerzas de empuje U1, U2, U3, y U4. En el capítulo 2, ecuación 2.24,

Modelo y Control LQR de una aeronave de cuatro rotores
JUAN Mª DÍAZ CANO. 96
se obtuvieron las fuerzas de empujes máximas y mínimas que puede entregar el sistema propulsor. Teniendo en cuenta estos datos, se calcularán las perturbaciones que se aplicarán.
Para realizar estas simulaciones, se partirá de un punto inicial donde todos los estados son cero y el eje ‘Z‘ será un metro, y como punto final se marcará una amplitud de referencia en ‘Xr’, ‘Yr’ y ‘Zr’ de 0.5m y el ángulo‘Ψr’ una referencia de 0.1rad.
Se representarán los diferentes ejes ‘X’, ‘Y’, ‘Z’ y ‘Ψ’, además del selector e índice de la matriz, la fuerza de la perturbación y la velocidad de los motores.
• Perturbaciones en la fuerza U1.
La fuerza U1 afecta principalmente al eje ‘Z’ y tiene unos límites de 0N el mínimo y 9.67N como máximo. En está simulación se aplicará una perturbación de 4N y -3N.
Como se ve en la figura 9.7, el control LQR diseñado no es capaz de rechazar las perturbaciones, al igual que ocurría en el capítulo anterior, apareciendo un error en la posición de un 1cm, tanto en la perturbación positiva como en la negativa, pero el sistema no se vuelve inestable en ningún momento. El selector realiza diferentes conmutaciones porque a los demás ejes también se les cambia la referencia y el control intenta llevar todos los errores a cero. Esta acción se lleva a cabo en dos segundos, a partir del cual se aplica las perturbaciones al sistema.
Para solucionar este problema se usará un LQR con efecto integral, de esa forma se corregirá el error en posición debido a las perturbaciones que pudieran aparecer.

Modelo y Control LQR de una aeronave de cuatro rotores
JUAN Mª DÍAZ CANO. 97
0 1 2 3 4 5 6 70.5
1
1.5
2Posición Z (m)
Eje "Z"Referencia 1.5m
0 1 2 3 4 5 6 71
2
3
4Selector e índices de matrices
SelectorÍndice
0 1 2 3 4 5 6 7-5
0
5Perturbación en U1 (N)
0 1 2 3 4 5 6 70
100
200
300Velocidad motores 1, 2, 3, 4 (rad/s)
Tiempo (s)
Motor U1Motor U2Motor U3Motor U4
4N
-3N
1.6m
1.4m
254rad/s93rad/s
201.7rad/s
Figura 9.7. Simulación con perturbaciones en U1.
• Perturbaciones en la fuerza U2.
La fuerza U2 afecta directamente al eje ‘Y’ y los límites de saturación son -0.57N el mínimo y 0.57N como máximo. En la simulación se aplicarán unas perturbaciones de 0.5N y -0.3N.
Como se ve en la figura 9.8, al igual que pasaba en la figura 9.7, aparece un error en la posición de 2cm para la perturbación positiva y de 1cm para la negativa, por lo tanto el control diseñado no rechaza las perturbaciones, aunque el sistema no se vuelve inestable en ningún momento.

Modelo y Control LQR de una aeronave de cuatro rotores
JUAN Mª DÍAZ CANO. 98
0 1 2 3 4 5 6 7 80
0.2
0.4
Posición Y (m)
Eje "Y"Referencia Y
0 1 2 3 4 5 6 7 81
2
3
4Selector e índices de matrices
SelectorÍndice
0 1 2 3 4 5 6 7 8-0.5
0
0.5Perturbación en U2 (N)
0 1 2 3 4 5 6 7 80
100
200
300Velocidad motores 1, 2, 3, 4 (rad/s)
Tiempo (s)
Motor U1Motor U2Motor U3Motor U482rad/s
0.5N -0.3N
0.51m
0.48m
273rad/s
201.7rad/s
Figura 9.8. Simulación con perturbaciones en U2.
• Perturbaciones en la fuerza U3.
La fuerza U3 afecta directamente al eje ‘X’ y los límites de saturación son -0.57N el mínimo y 0.57N como máximo.
El comportamiento de los ejes ‘X’ e ‘Y’ y los límites de fuerza de empuje son iguales, por tanto la simulación del eje ‘X’, figura 9.9, será igual a la del eje ‘Y’, la única variación será que los motores afectados son U1 y U3.

Modelo y Control LQR de una aeronave de cuatro rotores
JUAN Mª DÍAZ CANO. 99
0 1 2 3 4 5 6 7 80
0.2
0.4
0.6
0.8Posición X (m)
0 1 2 3 4 5 6 7 81
2
3
4Selector e índices de matrices
0 1 2 3 4 5 6 7 8-0.5
0
0.5Perturbación en U3 (N)
0 1 2 3 4 5 6 7 80
100
200
300Velocidad motores 1, 2, 3, 4 (rad/s)
Tiempo (s)
Motor U1Motor U2Motor U3Motor U4
SelectorÍndice
Eje "X"Referencia 0.5m
82rad/s
0.5N -0.3N
0.49m0.51m
273rad/s
201.7rad/s
Figura 9.9. Simulación con perturbaciones en U3.
• Perturbaciones en la fuerza U4.
La fuerza U4 afecta directamente al ángulo ‘Ψ’ y los límites de saturación son -0.11N el mínimo y 0.11N como máximo. Para realizar la simulación se aplicará una perturbación de 0.1N y -0.05N.
En la figura 9.10 se representa el ángulo ‘Ψ’ para estudiar el comportamiento cuando se le aplica una perturbación. Volverá a aparecer un error en la posición de 0.01rad para ambas perturbaciones, pero el sistema no se volverá inestable en ningún momento y se considera que el error está dentro de los límites del intervalo de error, por lo que el Quad-Rotor estará estabilizado. Lo que si se aprecia es una discontinuidad en las velocidades de los motores en el instante 2.2s, debida a la conmutación del selector e índice.

Modelo y Control LQR de una aeronave de cuatro rotores
JUAN Mª DÍAZ CANO. 100
0 1 2 3 4 5 6 7 80
0.05
0.1
Ángulo Psi (rad)
Ángulo "Psi"Referencia 0.1rad
0 1 2 3 4 5 6 7 81
2
3
4Selector e índices de matrices
SelectorÍndice
0 1 2 3 4 5 6 7 8-0.1
0
0.1Perturbación en U4 (N)
0 1 2 3 4 5 6 7 80
100
200
300Velocidad motores 1, 2, 3, 4 (rad/s)
Tiempo (s)
Motor U1Motor U2Motor U3Motor U4
0.1N
-0.05N
0.101rad
272rad/s
85.7rad/s
0.09rad
201.7rad/s
Figura 9.10. Simulación con perturbaciones en U4.
• Perturbaciones en la fuerza U1, U2, U3, U4.
Para terminar este bloque se realizará una simulación donde se aplique perturbaciones en todas las variables de empuje Ui y se aumentarán los escalones de referencias a todas las variables, ‘Xr’ e ‘Yr’ un escalón de amplitud 1m, a ‘Zr’ un escalón de 2m y el ángulo‘Ψr’ una referencia de 0.26rad. De esta forma se comprobará cómo se comporta el control LQR cuando se le exige el máximo.
Las perturbaciones aplicadas a U1, U2, U3 y U4 serán respectivamente 2N, 0.25N, 0.25N y 0.02N.

Modelo y Control LQR de una aeronave de cuatro rotores
JUAN Mª DÍAZ CANO. 101
En la figura 9.11 se representarán las variables ‘X’, ‘Y’ y ‘Z’, los ángulos ‘θ’, ‘φ’ y‘Ψ’, la velocidades angulares de los motores y además del selector e índice de la matriz de ganancias.
0 1 2 3 4 5 6 7 80
1
2
Posición X, Y y Z (m)
0 1 2 3 4 5 6 7 8-0.2
0
0.2
Ángulo Theta, Phi y Psi (rad)
0 1 2 3 4 5 6 7 81
2
3
4Selector e índices de matrices
0 1 2 3 4 5 6 7 80
1
2
3Perturbación en U1, U2, U3 y U4 (N)
0 1 2 3 4 5 6 7 80
100
200
300Velocidad motores 1, 2, 3, 4 (rad/s)
Tiempo (s)
Motor U1Motor U2Motor U3Motor U4
Perturbación U1Perturbación U2, U3Perturbación U4
SelectorÍndice
Ángulo ThetaÁngulo PhiÁngulo PsiReferencia Psi
Eje "X"Referencia X e YEje "Y"Eje "Z"Referencia Z
2.08m1.1m
0.95m
0.26rad
0.02N0.25N
2N
2m 2.06m
Figura 9.11. Simulación con perturbaciones en U1, U2, U3, U4.
Los estados ‘X’, ‘Y’, ‘Z’ y el ángulo‘Ψ’ alcanzan los valores impuestos en la referencia, pero tienen un error debido a las perturbaciones. Los ejes más rápidos son ‘Ψ’ y ‘Z’ cuyos errores debido a las perturbaciones serán cero y 6cm respectivamente. Como en los casos anteriores, en el eje ‘X’ aparece la sobreoscilación del 10% debido a que el eje ‘Ψ’ tiene una referencia positiva impuesta, si la referencia fuese negativa, el eje que tendría la sobreoscilación sería el ‘Y’, ambos ejes tiene un error de 0.3cm.
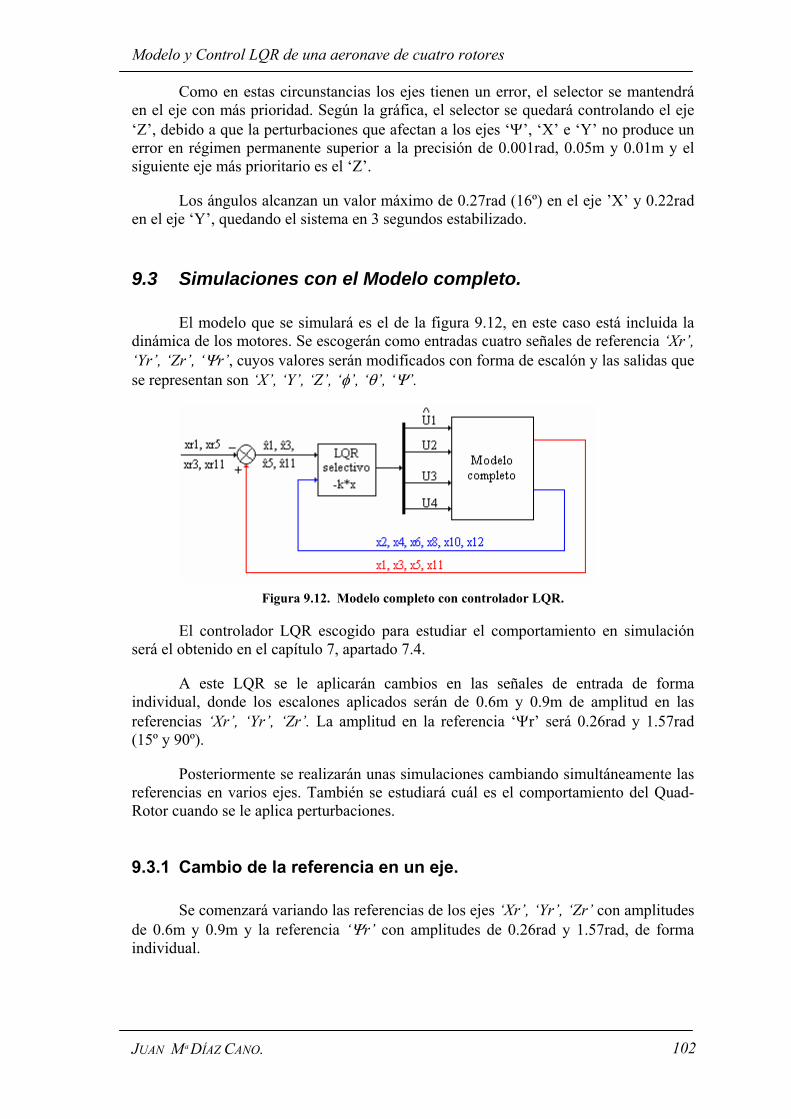
Modelo y Control LQR de una aeronave de cuatro rotores
JUAN Mª DÍAZ CANO. 102
Como en estas circunstancias los ejes tienen un error, el selector se mantendrá en el eje con más prioridad. Según la gráfica, el selector se quedará controlando el eje ‘Z’, debido a que la perturbaciones que afectan a los ejes ‘Ψ’, ‘X’ e ‘Y’ no produce un error en régimen permanente superior a la precisión de 0.001rad, 0.05m y 0.01m y el siguiente eje más prioritario es el ‘Z’.
Los ángulos alcanzan un valor máximo de 0.27rad (16º) en el eje ’X’ y 0.22rad en el eje ‘Y’, quedando el sistema en 3 segundos estabilizado.
9.3 Simulaciones con el Modelo completo.
El modelo que se simulará es el de la figura 9.12, en este caso está incluida la dinámica de los motores. Se escogerán como entradas cuatro señales de referencia ‘Xr’, ‘Yr’, ‘Zr’, ‘Ψr’, cuyos valores serán modificados con forma de escalón y las salidas que se representan son ‘X’, ‘Y’, ‘Z’, ‘φ’, ‘θ’, ‘Ψ’.
Figura 9.12. Modelo completo con controlador LQR.
El controlador LQR escogido para estudiar el comportamiento en simulación será el obtenido en el capítulo 7, apartado 7.4.
A este LQR se le aplicarán cambios en las señales de entrada de forma individual, donde los escalones aplicados serán de 0.6m y 0.9m de amplitud en las referencias ‘Xr’, ‘Yr’, ‘Zr’. La amplitud en la referencia ‘Ψr’ será 0.26rad y 1.57rad (15º y 90º).
Posteriormente se realizarán unas simulaciones cambiando simultáneamente las referencias en varios ejes. También se estudiará cuál es el comportamiento del Quad-Rotor cuando se le aplica perturbaciones.
9.3.1 Cambio de la referencia en un eje.
Se comenzará variando las referencias de los ejes ‘Xr’, ‘Yr’, ‘Zr’ con amplitudes de 0.6m y 0.9m y la referencia ‘Ψr’ con amplitudes de 0.26rad y 1.57rad, de forma individual.

Modelo y Control LQR de una aeronave de cuatro rotores
JUAN Mª DÍAZ CANO. 103
Se estudiará dos puntos de funcionamiento, el primero cuando el Quad-Rotor parta del punto inicial con los motores parados ‘Z = 0’ y el segundo cuando el sistema se encuentre en un punto de trabajo con los motores funcionando ‘Z > 0’.
En estas simulaciones no se tiene en cuenta el efecto suelo, por tanto la referencia ‘Z = 0’ sólo corresponde a una posición en la cual los motores están parados. Un resultado de Z < 0 indicaría que el Quad-Rotor no se levanta del suelo, pero en el primer punto de funcionamiento servirá para comprobar cómo afecta la dinámica de los motores en el despegue.
• Escogiendo como punto inicial todos los estados a cero.
Figura 9.13. Simulación cambiando la referencia del eje ‘Z’ en 0.5 metros.
En la figura 9.13 se muestra como el sistema parte de un punto inicial ‘Z = 0’ hasta el valor aplicado en la referencia de 0.6 metros, marcando un tiempo de subida de 0.6s y un tiempo de establecimiento de 0.68s. En la segunda referencia a 1.5m, el tiempo de subida es de 0.59s y el de establecimiento es 0.66s. En ambos casos se consigue alcanzar la referencia sin sobreoscilación. El valor de la referencia con el valor de los errores a cero lo alcanza en 0.9 segundos, en los dos casos, 0.2 segundos más que el modelo reducido de la figura 9.2.
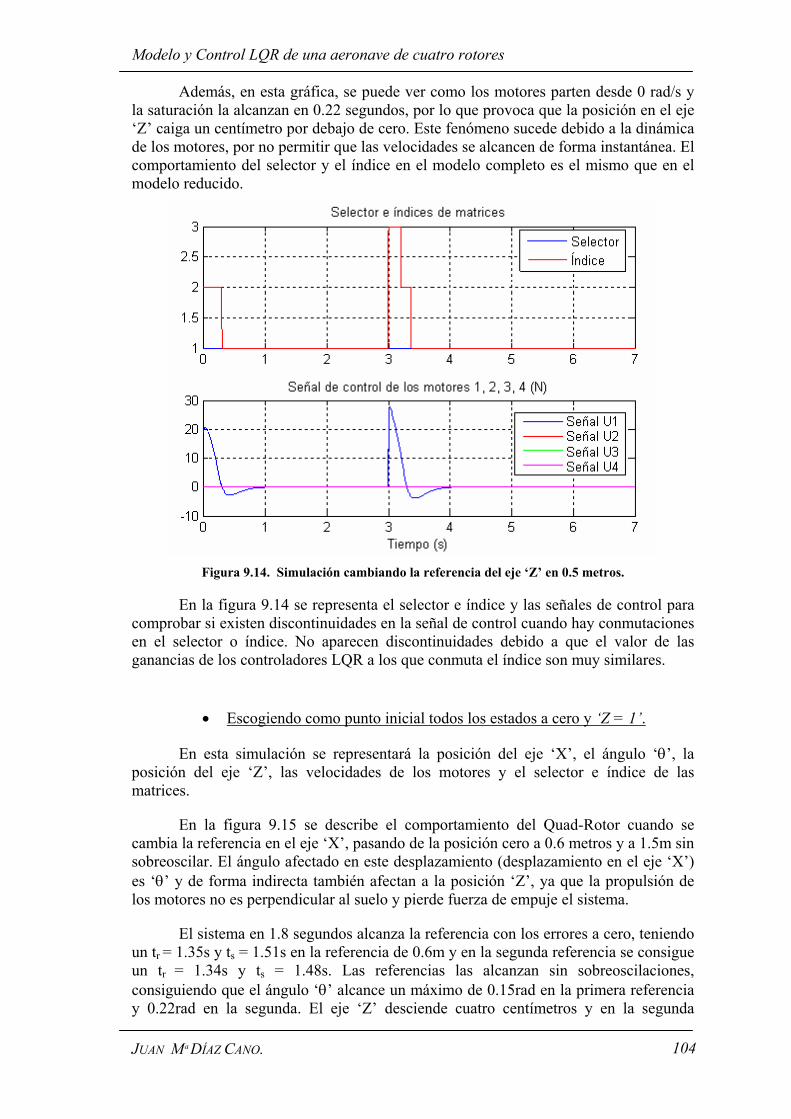
Modelo y Control LQR de una aeronave de cuatro rotores
JUAN Mª DÍAZ CANO. 104
Además, en esta gráfica, se puede ver como los motores parten desde 0 rad/s y la saturación la alcanzan en 0.22 segundos, por lo que provoca que la posición en el eje ‘Z’ caiga un centímetro por debajo de cero. Este fenómeno sucede debido a la dinámica de los motores, por no permitir que las velocidades se alcancen de forma instantánea. El comportamiento del selector y el índice en el modelo completo es el mismo que en el modelo reducido.
Figura 9.14. Simulación cambiando la referencia del eje ‘Z’ en 0.5 metros.
En la figura 9.14 se representa el selector e índice y las señales de control para comprobar si existen discontinuidades en la señal de control cuando hay conmutaciones en el selector o índice. No aparecen discontinuidades debido a que el valor de las ganancias de los controladores LQR a los que conmuta el índice son muy similares.
• Escogiendo como punto inicial todos los estados a cero y ‘Z = 1’.
En esta simulación se representará la posición del eje ‘X’, el ángulo ‘θ’, la posición del eje ‘Z’, las velocidades de los motores y el selector e índice de las matrices.
En la figura 9.15 se describe el comportamiento del Quad-Rotor cuando se cambia la referencia en el eje ‘X’, pasando de la posición cero a 0.6 metros y a 1.5m sin sobreoscilar. El ángulo afectado en este desplazamiento (desplazamiento en el eje ‘X’) es ‘θ’ y de forma indirecta también afectan a la posición ‘Z’, ya que la propulsión de los motores no es perpendicular al suelo y pierde fuerza de empuje el sistema.
El sistema en 1.8 segundos alcanza la referencia con los errores a cero, teniendo un tr = 1.35s y ts = 1.51s en la referencia de 0.6m y en la segunda referencia se consigue un tr = 1.34s y ts = 1.48s. Las referencias las alcanzan sin sobreoscilaciones, consiguiendo que el ángulo ‘θ’ alcance un máximo de 0.15rad en la primera referencia y 0.22rad en la segunda. El eje ‘Z’ desciende cuatro centímetros y en la segunda

Modelo y Control LQR de una aeronave de cuatro rotores
JUAN Mª DÍAZ CANO. 105
referencia 6cm, existiendo una diferencia considerable entre el modelo reducido y el completo. Otro dato interesante es que los motores no se saturan, consiguiendo una velocidad angular máxima de 269rad/s, pero en el transitorio de los motores, en el modelo completo, aparecen unas oscilaciones que en el modelo reducido no sufría.
En el caso de la selección de controladores, el selector toma el valor 4 un período corto de tiempo, puesto que el desplazamiento en el eje ‘X’ también le ha afectado al eje ‘Ψ’, pero esto no sucede en el modelo reducido porque los motores alcanzan las velocidades de forma instantánea.
0 1 2 3 4 5 6 70
0.5
1
1.5
2Posición X (m)
Eje "X"Referencia
0 1 2 3 4 5 6 71
2
3
4Selector e índices de matrices
SelectorÍndice
0 1 2 3 4 5 6 7-0.1
00.10.2
Ángulo Theta (rad)
0 1 2 3 4 5 6 7
0.95
1Posición Z (m)
Eje "Z"
Referencia 1m
0 1 2 3 4 5 6 70
100
200
300Velocidad motores 1, 2, 3, 4 (rad/s)
Tiempo (s)
Motor U1Motor U2Motor U3Motor U4
1.5m
0.6m
201.7rad/s
269rad/s
0.15rad 0.23rad
Figura 9.15. Simulación cambiando la referencia del eje ‘X’ en 0.5 metros.
En la figura 9.16 se representa la señal de control junto con el selector y el índice de la matriz 3D de ganancias, comprobando que no hay discontinuidades en la
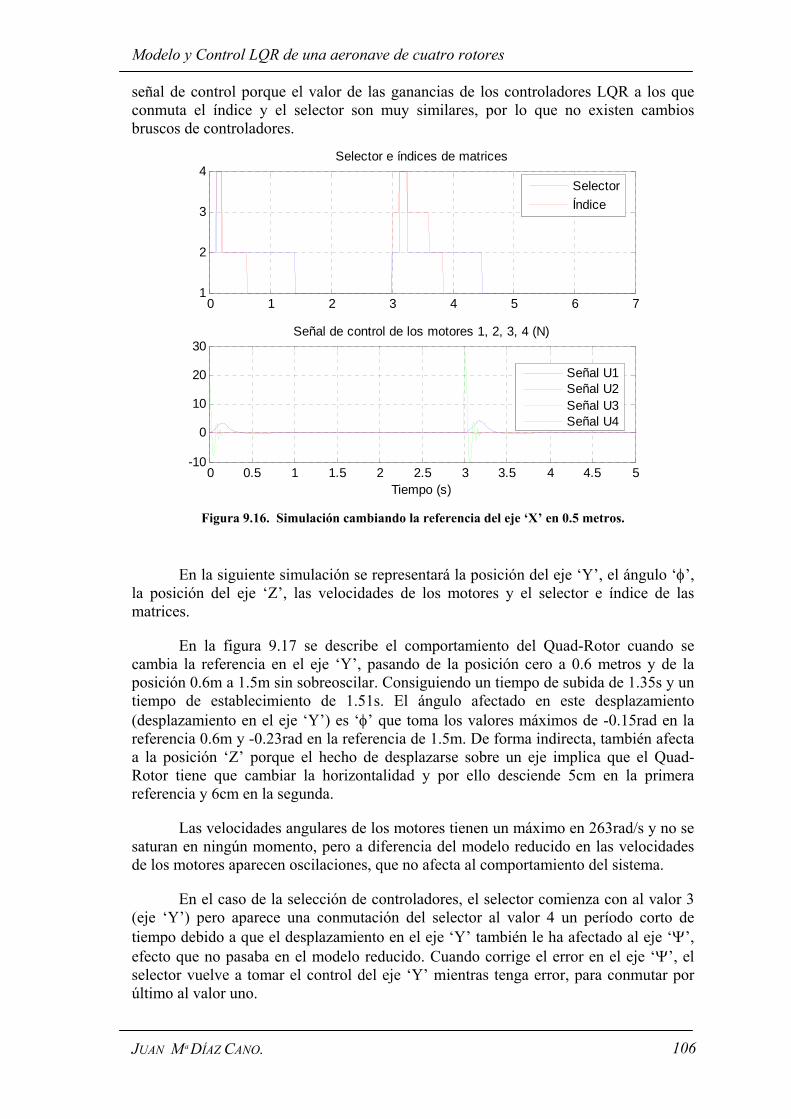
Modelo y Control LQR de una aeronave de cuatro rotores
JUAN Mª DÍAZ CANO. 106
señal de control porque el valor de las ganancias de los controladores LQR a los que conmuta el índice y el selector son muy similares, por lo que no existen cambios bruscos de controladores.
0 1 2 3 4 5 6 71
2
3
4Selector e índices de matrices
SelectorÍndice
0 0.5 1 1.5 2 2.5 3 3.5 4 4.5 5-10
0
10
20
30Señal de control de los motores 1, 2, 3, 4 (N)
Tiempo (s)
Señal U1Señal U2Señal U3Señal U4
Figura 9.16. Simulación cambiando la referencia del eje ‘X’ en 0.5 metros.
En la siguiente simulación se representará la posición del eje ‘Y’, el ángulo ‘φ’, la posición del eje ‘Z’, las velocidades de los motores y el selector e índice de las matrices.
En la figura 9.17 se describe el comportamiento del Quad-Rotor cuando se cambia la referencia en el eje ‘Y’, pasando de la posición cero a 0.6 metros y de la posición 0.6m a 1.5m sin sobreoscilar. Consiguiendo un tiempo de subida de 1.35s y un tiempo de establecimiento de 1.51s. El ángulo afectado en este desplazamiento (desplazamiento en el eje ‘Y’) es ‘φ’ que toma los valores máximos de -0.15rad en la referencia 0.6m y -0.23rad en la referencia de 1.5m. De forma indirecta, también afecta a la posición ‘Z’ porque el hecho de desplazarse sobre un eje implica que el Quad-Rotor tiene que cambiar la horizontalidad y por ello desciende 5cm en la primera referencia y 6cm en la segunda.
Las velocidades angulares de los motores tienen un máximo en 263rad/s y no se saturan en ningún momento, pero a diferencia del modelo reducido en las velocidades de los motores aparecen oscilaciones, que no afecta al comportamiento del sistema.
En el caso de la selección de controladores, el selector comienza con al valor 3 (eje ‘Y’) pero aparece una conmutación del selector al valor 4 un período corto de tiempo debido a que el desplazamiento en el eje ‘Y’ también le ha afectado al eje ‘Ψ’, efecto que no pasaba en el modelo reducido. Cuando corrige el error en el eje ‘Ψ’, el selector vuelve a tomar el control del eje ‘Y’ mientras tenga error, para conmutar por último al valor uno.

Modelo y Control LQR de una aeronave de cuatro rotores
JUAN Mª DÍAZ CANO. 107
0 1 2 3 4 5 6 70
0.5
1
1.5
2Posición Y (m)
0 1 2 3 4 5 6 7
-0.2-0.1
00.1
Ángulo Phi (rad)
0 1 2 3 4 5 6 7
0.95
1Posición Z (m)
Eje "Z"
Referencia 1m
0 1 2 3 4 5 6 70
100
200
300Velocidad motores 1, 2, 3, 4 (rad/s)
Tiempo (s)
Eje "Y"Referencia
0 1 2 3 4 5 6 71
2
3
4Selector e índices de matrices
Motor U1Motor U2Motor U3Motor U4
1.5m
0.6m
201.7rad/s
269rad/s
-0.15rad -0.23rad
Figura 9.17. Simulación cambiando la referencia del eje ‘Y’ en 0.5 metros.
En la figura 9.18 se representa la señal de control junto con el selector y el índice de la matriz 3D de ganancias, apreciándose que no existen discontinuidades en la señal de control, al igual que en el eje ‘X’, porque los controladores a los que conmuta son similares.

Modelo y Control LQR de una aeronave de cuatro rotores
JUAN Mª DÍAZ CANO. 108
0 1 2 3 4 5 6 71
2
3
4Selector e índices de matrices
0 0.5 1 1.5 2 2.5 3 3.5 4 4.5 5-30
-20
-10
0
10Señal de control de los motores 1, 2, 3, 4 (N)
Tiempo (s)
SelectorÍndice
Señal U1Señal U2Señal U3Señal U4
Figura 9.18. Simulación cambiando la referencia del eje ‘Y’ en 0.5 metros.
En esta última simulación se representará el ángulo ‘Ψ’, la posición del eje ‘Z’, las velocidades de los motores y el selector e índice de las matrices.
En la figura 9.19 se representa el comportamiento del Quad-Rotor cuando se cambia la referencia en el eje ‘Ψ’ (eje de giro sobre sí mismo), pasando de la posición inicial cero a 0.26 radianes y de 0.26rad a 1.57 radianes, existiendo una sobreoscilación del 0.1% en dicho eje, debido a que el controlador está diseñado para un escalón máximo de 0.37rad. En la primera referencia hay un tr = 0.36s y ts = 0.38s y en la segunda referencia los valores son tr = 0.33s y ts = 0.43s. El cambio en el ángulo ‘Ψ’ también afecta a la posición ‘Z’, haciendo descender a ésta 9cm en la referencia de 0.5rad y 3cm en la referencia 0.8rad. Este fenómeno ocurre porque para girar sobre sí mismo existen motores que bajan su velocidad y no se ejerce la fuerza de empuje necesaria para mantener la altura.
El modelo alcanza la referencia de 0.26rad manteniendo el error a cero en 0.48 segundos y la referencia 1.57rad con el error a cero en 0.6 segundos. Las velocidades angulares de los motores sufren cambios en el modelo completo que no aparecen en el modelo reducido.
El selector empieza con el valor cuatro correspondiente al eje ‘Ψ’ mientras que el error sea menor que la precisión de dicho eje. El valor del índice inicialmente toma el valor tres para posteriormente pasar al valor dos cuando el error sea menor de 0.25rad y terminar cuando está estabilizado con el valor uno.

Modelo y Control LQR de una aeronave de cuatro rotores
JUAN Mª DÍAZ CANO. 109
0 1 2 3 4 5 6 70
0.2
0.4
0.6
0.8Ángulo Psi (rad)
Angulo "PSI"Referencia
0 1 2 3 4 5 6 71
2
3
4Selector e índices de matrices
SelectorÍndice
0 1 2 3 4 5 6 70.8
0.9
1Posición Z (m)
Eje "Z"Referencia 1m
0 1 2 3 4 5 6 70
100
200
300Velocidad motores 1, 2, 3, 4 (rad/s)
Tiempo (s)
Motor U1Motor U2Motor U3Motor U4201.7rad/s
0.8rad
0.5rad
0.81m0.87m
Figura 9.19. Simulación cambiando la referencia del ángulo’Ψ’ en 0.26 radianes (15º).
En la figura 9.20 se representa la señal de control junto con el selector y el índice de la matriz 3D de ganancias, comprobando que aparecen discontinuidades en la señal de control cuando existen conmutaciones del índice. Esto sucede porque los valores de las ganancias de los controladores LQR entre los que conmuta son muy diferentes.

Modelo y Control LQR de una aeronave de cuatro rotores
JUAN Mª DÍAZ CANO. 110
0 1 2 3 4 5 6 71
2
3
4Selector e índices de matrices
SelectorÍndice
0 1 2 3 4 5 6 7-5
0
5
10Señal de control de los motores 1, 2, 3, 4 (N)
Tiempo (s)
Señal U1Señal U2Señal U3Señal U4
Discontinuidad
Figura 9.20. Simulación cambiando la referencia del ángulo’Ψ’ en 0.26 radianes (15º).
9.3.2 Cambio de la referencia en varios ejes.
Se realizará una simulación donde se variarán de forma simultánea las referencias de las entradas ‘Xr’, ‘Yr’, ‘Zr’ con amplitudes de 0.75m, 1m, 1m respectivamente y la referencia ‘Ψr’ con amplitud de 0.26rad (15º).
• Escogiendo como punto inicial todos los estados a cero y ‘Z = 1’.
En esta simulación se representará las posiciones de los ejes ‘X’ e ‘Y’, los ángulos ‘θ’, ‘φ’ y‘φ’, la posición del eje ‘Z’, el selector e índices de las matrices de ganancias y las velocidades de los motores.
En la figura 9.21 se muestra el resultado de esta simulación, hay que recordar que el controlador que se usa en las simulaciones está diseñado para escalones con amplitud máxima de 0.75m en los ejes ‘X’ e ‘Y’, amplitud de 1m en el eje ‘Z’ y un escalón de amplitud máxima de 0.35rad en el ángulo‘Ψ’. Se aplican escalones de referencias que están dentro de las amplitudes máximas, para los cuales se diseñaron los controladores.
En las gráficas se muestra que el sistema se estabiliza en tres segundos, al igual que ocurría en el modelo reducido, figura 9.6. El comportamiento de los ejes ‘X’ e ‘Y’ son iguales en ambos modelos: “completo y reducido”, pero los errores que alcanza el sistema son mayores en el modelo completo, puesto que los motores no son capaces de responder al instante para corregir el error.
Hay que observar que la sobreoscilación en el eje ‘X’ es del 19%, mayor que en el eje ‘Y’ que es del 6%. Se alcanza un máximo de 0.94m, mientras que en el reducido era 0.86m. Los tiempos de subida y de establecimiento en el eje ‘X’ son tr = 1.09s y ts =

Modelo y Control LQR de una aeronave de cuatro rotores
JUAN Mª DÍAZ CANO. 111
1.13s y en el eje ‘Y’ son tr = 1.12s y ts = 1.19s. Existen diferencias en los ángulos ‘φ’ y ‘θ’, ya que en el modelo completo alcanza un máximo de 0.26rad y en el reducido alcanzaba 0.21rad. El ángulo ‘Ψ’ es el más rápido, consiguiendo un tr = 0.31s y ts = 0.4s, seguido del eje ‘Z’ con tr = 1.01s y ts = 1.11s.
Hay que notar que la posición ‘Z’ desciende 6cm y en el modelo reducido el descenso era de 0.1cm, esto es debido a la dinámica de los motores. La gráfica de las velocidades de los motores difiere de la figura 9.6 (modelo reducido) al existir oscilaciones en los motores U3 y U4 del modelo completo. A partir de los 0.7 segundos hay una similitud en las velocidades de los motores.
0 1 2 3 4 5 6 70
0.5
1
1.5
2Posición X, Y y Z (m)
Eje "X"Referencia XEje "Y"Referencia YEje "Z"Referencia Z
0 1 2 3 4 5 6 71
2
3
4Selector e índices de matrices
SelectorÍndice
0 1 2 3 4 5 6 7
-0.2-0.1
00.10.2
Ángulo Theta, Phi y Psi (rad)
Ángulo ThetaÁngulo PhiÁngulo PsiReferencia Psi
0 1 2 3 4 5 6 70
100
200
300Velocidad motores 1, 2, 3, 4 (rad/s)
Tiempo (s)
Motor U1Motor U2Motor U3Motor U4
2m0.94m1.06m
0.94m
1m
0.75m
-0.26rad
28.5rad/s
Figura 9.21. Simulación cambiando las cuatro referencias de forma simultánea.

Modelo y Control LQR de una aeronave de cuatro rotores
JUAN Mª DÍAZ CANO. 112
En la figura 9.22 se representa la señal de control junto con el selector y el índice de la matriz 3D de ganancias. En esta simulación existen discontinuidades en la señal de control cuando conmuta el selector. Esta discontinuidad es pequeña por ser los controladores LQR entre los que conmuta parejos.
0 0.5 1 1.5 2 2.5 3 3.5 41
2
3
4Selector e índices de matrices
SelectorÍndice
0 0.5 1 1.5 2 2.5 3 3.5 4-40
-20
0
20
40Señal de control de los motores 1, 2, 3, 4 (N)
Tiempo (s)
Señal U1Señal U2Señal U3Señal U4
Discontinuidad
Figura 9.22. Simulación cambiando las cuatro referencias de forma simultánea.
9.3.3 Perturbaciones mantenidas.
Se simulará el Quad-Rotor aplicando de forma independiente perturbaciones que afectarán a las fuerzas de empuje U1, U2, U3, y U4. En el capítulo 2, ecuación 2.24, se obtuvieron las fuerzas de empujes máximas y mínimas que puede entregar el sistema propulsor. Teniendo en cuenta estos datos se calcularán las perturbaciones que se aplicarán.
Para realizar estas simulaciones, se partirá de un punto inicial donde todos los estados son cero y el eje ‘Z‘ será un metro. Como punto final se marcará una referencia de amplitud 0.5m para los ejes ‘Xr’, ‘Yr’ y ‘Zr’ y al ángulo‘Ψr’ una amplitud de 0.1rad.
• Perturbaciones en la fuerza U1.
La fuerza U1 afecta principalmente al eje ‘Z’ y tiene unos límites de 0N el mínimo y 9.67N como máximo. En está simulación se aplicará una perturbación de 4N y -3N.

Modelo y Control LQR de una aeronave de cuatro rotores
JUAN Mª DÍAZ CANO. 113
0 1 2 3 4 5 6 70.5
1
1.5
2Posición Z (m)
Eje "Z"Referencia 1.5m
0 1 2 3 4 5 6 71
2
3
4Selector e índices de matrices
SelectorÍndice
0 1 2 3 4 5 6 7-5
0
5Perturbación en U1 (N)
0 1 2 3 4 5 6 70
100
200
300Velocidad motores 1, 2, 3, 4 (rad/s)
Tiempo (s)
Motor U1Motor U2Motor U3Motor U4
1.6m
1.4m
4N -3N
254rad/s
93rad/s
Figura 9.23. Simulación con perturbaciones en U1.
Como se ve en la figura 9.23, y al igual que sucedía en el modelo reducido figura 9.7, el controlador LQR diseñado no es capaz de rechazar las perturbaciones y aparece un error en la posición, pero el sistema no se vuelve inestable en ningún momento.
El comportamiento del eje ‘Z’ es igual en ambos modelos, pero en la gráfica de las velocidades existen diferencias, ya que en el modelo completo no hay cambios bruscas de velocidades de los motores, hecho que si ocurre en el modelo reducido. Otro dato es que, en la figura 9.23, los motores sólo se saturan durante 20ms y en el modelo reducido se saturan durante 0.3 segundos.

Modelo y Control LQR de una aeronave de cuatro rotores
JUAN Mª DÍAZ CANO. 114
El selector comienza corrigiendo los errores en los ejes ‘Ψ’, ‘X’ e ‘Y’ hasta que son cero y termina en el eje ‘Z’ cuando el sistema está estabilizado. En ese instante se aplica la perturbación, apareciendo un error en la posición de un centímetro.
• Perturbaciones en la fuerza U2.
La fuerza U2 afecta directamente al eje ‘Y’ y los límites de saturación son -0.57N el mínimo y 0.57N como máximo. Para realizar la simulación se aplicará una perturbación de 0.5N y -0.3N.
0 1 2 3 4 5 6 7 80
0.2
0.4
Posición Y (m)
0 1 2 3 4 5 6 7 81
2
3
4Selector e índices de matrices
SelectorÍndice
0 1 2 3 4 5 6 7 8-0.5
0
0.5Perturbación en U2 (N)
0 1 2 3 4 5 6 7 80
100
200
300Velocidad motores 1, 2, 3, 4 (rad/s)
Tiempo (s)
Motor U1Motor U2Motor U3Motor U4
Eje "Y"Referencia 0.5m
0.5N -0.3N
0.38m
0.55m
0.48m
273rad/s
83rad/s
Figura 9.24. Simulación con perturbaciones en U2.
En esta simulación se ha tenido que alargar el tiempo de simulación y la duración de la perturbación para que el error de posición debida a la perturbación sea visible en la gráfica.

Modelo y Control LQR de una aeronave de cuatro rotores
JUAN Mª DÍAZ CANO. 115
En la figura 9.24 se comprueba que en el momento que se aplica la perturbación, la posición del eje ‘Y’ se ve afectada y necesita dos segundos para estabilizarse, apareciendo una oscilación, puesto que la perturbación ha perjudicado al eje ‘Ψ’, como se puede apreciar en el valor que toma el selector (selector = 4). Cuando se estabiliza en el segundo 4, aparece el error en régimen permanente debido a la perturbación.
Al aplicarle la perturbación en sentido contrario (-0.3N), el comportamiento es el mismo al anterior pero con signo contrario, reflejándose la perturbación de nuevo en el eje ‘Ψ’, volviendo a aparecer el error en la posición a los siete segundos. El efecto que produce la perturbación en el eje ‘Ψ’ no aparece en el modelo reducido porque los motores alcanzan las velocidades de forma instantánea.
• Perturbaciones en la fuerza U3.
La fuerza U3 afecta directamente al eje ‘X’ y los límites de saturación son -0.57N el mínimo y 0.57N como máximo.
El comportamiento de los ejes ‘X’ e ‘Y’ y los límites de fuerza de empuje son iguales, por tanto la simulación del eje ‘X’ debería salir igual a la del eje ‘Y’, sólo cambiaría que los motores afectados serán U1 y U3.
Como era de esperar, el comportamiento es el mismo, figura 9.25, apareciendo una sobreoscilación del 11% en el eje ‘X’, debido a que la perturbación le afecta también al eje ‘Ψ’, que tiene una referencia que debe mantener el controlador.

Modelo y Control LQR de una aeronave de cuatro rotores
JUAN Mª DÍAZ CANO. 116
0 1 2 3 4 5 6 7 80
0.2
0.4
0.6
0.8Posición X (m)
Eje "X"Referencia 0.5m
0 1 2 3 4 5 6 7 81
2
3
4Selector e índices de matrices
SelectorÍndice
0 1 2 3 4 5 6 7 8-0.5
0
0.5Perturbación en U3 (N)
0 1 2 3 4 5 6 7 80
100
200
300Velocidad motores 1, 2, 3, 4 (rad/s)
Tiempo (s)
Motor U1Motor U2Motor U3Motor U4
0.5N -0.3N
0.61m 0.44m
0.51m
273rad/s
81rad/s
Figura 9.25. Simulación con perturbaciones en U3.
• Perturbaciones en la fuerza U4.
La fuerza U4 afecta directamente al ángulo ‘Ψ’ y los límites de saturación son -0.11N el mínimo y 0.11N como máximo. Para realizar la simulación se aplicará una perturbación de 0.1N y -0.05N.
En la figura 9.26 se representa el ángulo ‘Ψ’, la perturbación aplicada, el selector e índices de las matrices y las velocidades de los motores para estudiar su comportamiento. Como ha estado pasando en los casos anteriores volverá a aparecer un error en la posición, pero el sistema no se volverá inestable en ningún momento.

Modelo y Control LQR de una aeronave de cuatro rotores
JUAN Mª DÍAZ CANO. 117
0 1 2 3 4 5 6 7 80
0.05
0.1
Ángulo Psi (rad)
0 1 2 3 4 5 6 7 81
2
3
4Selector e índices de matrices
0 1 2 3 4 5 6 7 8-0.1
0
0.1Perturbación en U4 (N)
0 1 2 3 4 5 6 7 80
100
200
300Velocidad motores 1, 2, 3, 4 (rad/s)
Tiempo (s)
Motor U1Motor U2Motor U3Motor U4
SelectorÍndice
Ángulo "Psi"Referencia 0.1rad
239rad/s
152rad/s85rad/s
273rad/s
201.7rad/s
0.1N
-0.05N
0.102rad0.098rad
0.11rad
Figura 9.26. Simulación con perturbaciones en U4.
En la figura 9.26 aparece una sobreoscilación del 1% con la primera perturbación y otra del 0.6% en la segunda perturbación. Esta sobreoscilación aparece cada vez que se aplique la perturbación, debida a la dinámica de los motores, porque necesita un cambio de velocidad tan rápido que los motores no pueden darlo. Si se vuelve a la figura 9.10, se podrá ver como no existe esa sobreoscilación, ya que los motores alcanzan la velocidad de forma inmediata al no tener incluida la dinámica.
Al igual que sucedía en las figuras anteriores, el transitorio en las velocidades no son iguales en el modelo completo y en el modelo reducido, apareciendo oscilaciones en la velocidad en el modelo completo.

Modelo y Control LQR de una aeronave de cuatro rotores
JUAN Mª DÍAZ CANO. 118
• Perturbaciones en la fuerza U1, U2, U3, U4.
Para terminar este bloque, se realizará una simulación donde se aplique perturbaciones en todas las variables de empuje Ui y se aumentarán los escalones de referencias a todas las variables, ‘Xr’ e ‘Yr’ un escalón de amplitud 1m, a ‘Zr’ un escalón de 2m y el ángulo‘Ψr’ una referencia de 0.26rad. De esta forma se comprobará cómo se comporta el control LQR.
Las perturbaciones aplicadas a U1, U2, U3 y U4 serán respectivamente 1N, 0.25N, 0.25N y 0.02N.
0 1 2 3 4 5 6 7 80
0.5
1
1.5
2
Posición X, Y y Z (m)
0 1 2 3 4 5 6 7 8-0.4
-0.2
0
0.2
Ángulo Theta, Phi y Psi (rad)
Ángulo ThetaÁngulo PhiÁngulo PsiReferencia Psi
0 1 2 3 4 5 6 7 81
2
3
4Selector e índices de matrices
SelectorÍndice
0 1 2 3 4 5 6 7 80
1
2
3Perturbación en U1, U2, U3 y U4 (N)
Perturbación U1Perturbación U2, U3Perturbación U4
0 1 2 3 4 5 6 7 80
100
200
300Velocidad motores 1, 2, 3, 4 (rad/s)
Tiempo (s)
Motor U1Motor U2Motor U3Motor U4
Eje "X"Referencia X e YEje "Y"Eje "Z"Referencia Z
2.08m
1.21m
1.05m
0.26rad
0.34rad
-0.26rad
0.02N0.25N
2N
Figura 9.27. Simulación con perturbaciones en U1, U2, U3, U4.

Modelo y Control LQR de una aeronave de cuatro rotores
JUAN Mª DÍAZ CANO. 119
En la figura 9.27 se representan las variables ‘X’, ‘Y’ y ‘Z’, los ángulos ‘θ’, ‘φ’ y‘Ψ’, la velocidades angulares de los motores y el selector e índices de las marices de ganancias del control LQR.
Los estados ‘X’, ‘Y’ y ‘Z’ y el ángulo‘Ψ’ alcanzan los valores impuestos en la referencia, pero tienen un error debido a las perturbaciones. Los ángulos alcanzan un valor máximo de 0.34 rad (20º) y en 7 segundos el Quad-Rotor está estabilizado.
En la figura 9.27, el comportamiento del Quad-Rotor es diferente a la figura 9.11, el eje más afectado es el ‘Z’, ya que el sistema sobreoscila un 8%, alcanzando un máximo de 2.08m cuando se aplica la perturbación. En el eje ‘Y’ aparece una sobreoscilación del 5%. El eje ’X’, por el contrario, la sobreoscilación es del 21%, manteniendo un error en la posición de 1cm, mismo error que tiene el eje ‘Y’. En el caso del ángulo ‘Ψ’, la perturbación es tan pequeña que no presenta error en la posición. En el modelo reducido los errores eran menores que en el modelo completo y todo debido a la dinámica de los motores de la figura 9.11.
Otro dato importante se puede ver en la gráfica del selector. Como se dijo en el capítulo 5, el control selectivo tiene unos ejes prioritarios y entre ellos el más prioritario es el eje ‘Z’, por eso cuando el error es superior a 0.3m entra en funcionamiento el control óptimo para el eje ‘Z’, corrigiendo dicho error. Si comparamos este control con el LQR único del capítulo 8, cuando se aplica las perturbaciones a todos los ejes el control selectivo es más rápido y los errores que sufren los ejes son menores.
9.4 Conclusión.
Tras observar las distintas simulaciones en ambos modelos (completo y reducido), se llega a la misma conclusión que en el capítulo 8, en el caso de realizar experimentos con el modelo reducido, se pierde mucha información válida que no se conocería si no se introdujese la dinámica de los motores al sistema.
También cabe destacar que al diseñar un control selectivo se aumenta la zona de trabajo del Quad-Rotor, sin necesidad de forzar al control LQR. Además en los casos más desfavorables, el comportamiento es mejor en el control selectivo puesto que se consigue que el sistema sea más rápido y con amplitud de errores menores que en el caso del control único.
El problema que presenta el diseño de controladores LQR conmutados es que aparecen discontinuidades en la señal de control cuando se conmuta en el controlador. En nuestro caso, como los controladores diseñados para cada conmutación tienen unos valores de ganancias parejos entre sí, no existe una discontinuidad pronunciada en la señal de control.

Modelo y Control LQR de una aeronave de cuatro rotores
JUAN Mª DÍAZ CANO. 120
10 Capítulo. Simulaciones del controlador LQR único con efecto integral.
10.1 Introducción.
En este capítulo se realizarán las simulaciones con un controlador LQR sobre los dos modelos del Quad-Rotor mencionados en el capítulo 4 (Modelo reducido y Modelo completo) utilizando un controlador LQR único con efecto integral. Además se comprobará la robustez del control ante perturbaciones, debiendo eliminar el error en posición que existía en el control sin efecto integral.
También se estudiará el comportamiento de ambos modelos, debiendo existir diferencias entre ellos, porque la dinámica de los motores tiene influencia sobre el modelo del Quad-Rotor y esta dinámica se acentúa más cuando la velocidad del Quad-Rotor es comparable a la dinámica de los motores.
10.2 Simulaciones con el Modelo reducido.
El modelo que se simulará es el de la figura 10.1. Se escogerán como entradas cuatro señales de referencia ‘Xr’, ‘Yr’, ‘Zr’, ‘Ψr’ cuyos valores serán modificados con forma de escalón. Las salidas que se representan son ‘X’, ‘Y’, ‘Z’, ‘φ’, ‘θ’, ‘Ψ’.
Los estados X13, X14, X15, X16, corresponden a la integral del error en posición de los estados (^) X1, X3, X5, X11,
Figura 10.1. Modelo reducido con controlador LQR.
El controlador LQR escogido para estudiar el comportamiento en simulación será el obtenido en el capítulo 7, apartado 7.3.1. A este LQR se le aplicarán cambios en las señales de entrada de forma individual, donde los escalones aplicados serán de 0.5m de amplitud en las referencias ‘Xr’, ‘Yr’, ‘Zr’ y 0.26rad (15º) de amplitud en la referencia ‘Ψr’.

Modelo y Control LQR de una aeronave de cuatro rotores
JUAN Mª DÍAZ CANO. 121
Posteriormente se realizarán unas simulaciones cambiando simultáneamente las referencias en varios ejes. También se estudiará en el punto siguiente cómo se comporta el controlador LQR ante perturbaciones.
10.2.1 Cambio de la referencia en un eje.
Se comenzará variando las referencias de los ejes ‘Xr’, ‘Yr’, ‘Zr’ con amplitudes de 0.5m y la referencia ‘Ψr’ con amplitudes de 0.26rad (15º), de forma individual.
• Escogiendo como punto inicial todos los estados a cero.
0 1 2 3 4 5 6 70
0.2
0.4
Posición Z (m)
Tiempo (s)
Eje "Z"Referencia = 0.5m
0 1 2 3 4 5 6 7100
150
200
250
300Velocidad motores 1, 2, 3, 4 (rad/s)
Tiempo (s)
Motor U1Motor U2Motor U3Motor U4
129rad/s
201.7rad/s
0.52m
Figura 10.2. Simulación cambiando la referencia del eje ‘Z’ en 0.5 metros.
En la figura 10.2 se muestra como el sistema pasa de un punto inicial ‘Z = 0’ hasta el valor aplicado en la referencia (0.5 metros) con un tr = 0.41s y ts = 0.45s. Además, la referencia se alcanza de forma rápida en un segundo con el error a cero y con una sobreoscilación del 2%.
En la gráfica de las velocidades, los motores pasan de cero a saturación 278 rad/s en cero segundos, característica que no ocurrirá en las simulaciones del modelo completo al tener incorporada la dinámica de los motores. Los motores permanecen saturados 0.15s.

Modelo y Control LQR de una aeronave de cuatro rotores
JUAN Mª DÍAZ CANO. 122
• Escogiendo como punto inicial todos los estados a cero y ‘Z = 1’.
En esta simulación se representará la posición del eje ‘X’, el ángulo ‘θ’, la posición del eje ‘Z’ y las velocidades de los motores.
En la figura 10.3 se describe el comportamiento del Quad-Rotor cuando se cambia la referencia en el eje ‘X’, pasando de la posición cero a 0.5 metros. El ángulo afectado en este desplazamiento (desplazamiento en el eje ‘X’) es θ y de forma indirecta también afecta a la posición ‘Z’, ya que la propulsión de los motores no es perpendicular al suelo y el sistema pierde fuerza de empuje.
El sistema en 2.3 segundos alcanza la referencia con el error a cero, presenta con un tr = 1.04s y ts = 1.16s y una sobreoscilación del 1%, consiguiendo que el ángulo θ alcance un máximo de 0.24rad, fenómeno que no ocurría en el LQR sin integrador. El eje ‘Z’ se ve poco afectado porque el descenso es de 0.4 cm. La velocidad angular del motor U3 se mantiene saturada durante 35ms, mismo tiempo que permanece parado el motor U1.
0 1 2 3 4 5 60
0.5
1Posición X (m)
Eje "X"Referencia = 0.5m
0 1 2 3 4 5 6-0.2
0
0.2
Ángulo Theta (rad)
0 1 2 3 4 5 60.995
1
1.005Posición Z (m)
Eje "Z"Referencia
0 1 2 3 4 5 60
100
200
300Velocidad motores 1, 2, 3, 4 (rad/s)
Tiempo (s)
Motor U1Motor U2Motor U3Motor U4
0.24rad
0.996m
201.7rad/s
Figura 10.3. Simulación cambiando la referencia del eje ‘X’ en 0.5 metros.

Modelo y Control LQR de una aeronave de cuatro rotores
JUAN Mª DÍAZ CANO. 123
En la siguiente simulación se representará la posición del eje ‘Y’, el ángulo ‘φ’, la posición del eje ‘Z’ y las velocidades de los motores.
En la figura 10.4 se describe el comportamiento del Quad-Rotor cuando se cambia la referencia en el eje ‘Y’, pasando de la posición cero a 0.5 metros. El ángulo ‘φ’ afecta al desplazamiento en el eje ‘Y’ y de forma indirecta también afecta a la posición ‘Z’ por el mismo motivo.
Como se ve en la gráfica, el comportamiento es simétrico al del eje ‘X’, alcanzando la referencia en 2.3 segundos con el error a cero, tiene los mismo tiempos de subida y establecimiento que el eje ‘X’ y consiguiendo que el ángulo ‘θ’ alcance un máximo de -0.24rad.
En esta situación, el eje ‘Z’ se ve poco afectado, puesto que el descenso es de 4 milímetro. La velocidad angular del motor U2 se mantiene saturada durante 35ms, mismo tiempo que permanece parado el motor U4.
0 1 2 3 4 5 60
0.2
0.4
0.6
0.8Posición Y (m)
Eje "Y"Referencia = 0.5m
0 1 2 3 4 5 6
-0.2
0
0.2Ángulo Phi (rad)
0 1 2 3 4 5 60.995
1
1.005Posición Z (m)
Eje "Z"Referencia
0 1 2 3 4 5 60
100
200
300Velocidad motores 1, 2, 3, 4 (rad/s)
Tiempo (s)
Motor U1Motor U2Motor U3Motor U4
-0.24rad
0.996m
Figura 10.4. Simulación cambiando la referencia del eje ‘Y’ en 0.5 metros.

Modelo y Control LQR de una aeronave de cuatro rotores
JUAN Mª DÍAZ CANO. 124
En esta última simulación se representará el ángulo ‘Ψ’, la posición del eje ‘Z’ y las velocidades de los motores.
En la figura 10.5 se representa el comportamiento del Quad-Rotor cuando se cambia la referencia en el eje ‘Ψ’ (eje de giro sobre sí mismo), pasando de la posición inicial cero a 0.26 radianes. El ángulo ‘Ψ’ afecta de forma indirecta a la posición ‘Z’, como se comprobó anteriormente, porque para girar sobre sí mismo hay motores que bajan su velocidad y no se ejerce la fuerza de empuje necesaria para mantener la altura.
El modelo alcanza la referencia de 0.26rad en 0.9 segundos con el error a cero, presenta un tr = 0.3s y ts = 0.36s, bajando el eje ‘Z’ como máximo dos centímetros. Las velocidades angulares de los motores U2 y U4 se saturan durante 0.15 segundos y los motores U1 y U3 se paran.
0 0.5 1 1.5 2 2.5 30
0.1
0.2
0.3
0.4Ángulo Psi (rad)
Angulo "PSI"Referencia = 0.26rad
0 0.5 1 1.5 2 2.5 30.985
0.99
0.995
1
1.005Posición Z (m)
Tiempo (s)
Eje "Z"Referencia
0 0.5 1 1.5 2 2.5 30
100
200
300Velocidad motores 1, 2, 3, 4 (rad/s)
Tiempo (s)
Motor U1Motor U2Motor U3Motor U4201.7rad/s
0.98m
Figura 10.5. Simulación cambiando la referencia del ángulo’Ψ’ en 0.26 radianes (15º).
10.2.2 Cambio de la referencia en varios ejes.
Se realizarán dos simulaciones en las cuales se variarán de forma simultánea las referencias de entradas ‘Xr’, ‘Yr’, ‘Zr’ con amplitudes de 0.75m, 1m, 1m y la referencia ‘Ψr’ con amplitudes de 0.26rad (15º).

Modelo y Control LQR de una aeronave de cuatro rotores
JUAN Mª DÍAZ CANO. 125
• Escogiendo como punto inicial todos los estados a cero y ‘Z = 1’.
En esta simulación se representará las posiciones de los ejes ‘X’ e ‘Y’, los ángulos ‘θ’, ‘φ’ y‘φ’, la posición del eje ‘Z’ y las velocidades de los motores.
En la figura 10.6 se muestra el resultado de esta simulación, hay que recordar que el controlador que se usa en las simulaciones está diseñado para escalones de 0.5m en los ejes ‘X’, ‘Y’ y ‘Z’ y un escalón de 0.1rad en el ángulo‘Ψ’. Así pues, se aplican escalones de referencias superiores a las utilizadas en el diseño, por ello pueden existir variaciones en el comportamiento del sistema.
0 0.5 1 1.5 2 2.5 3 3.5 4 4.5 50
0.5
1
Posición X e Y (m)
Eje "X"Referencia X = 0.75mEje "Y"Referencia Y = 1m
0 0.5 1 1.5 2 2.5 3 3.5 4 4.5 5-0.5
0
0.5Ángulo Theta, Phi y Psi (rad)
Ángulo ThetaÁngulo PhiÁngulo PsiReferencia Psi
0 0.5 1 1.5 2 2.5 3 3.5 4 4.5 51
1.5
2
Posición Z (m)
Eje "Z"Referencia
0 0.5 1 1.5 2 2.5 3 3.5 4 4.5 50
100
200
300Velocidad motores 1, 2, 3, 4 (rad/s)
Tiempo (s)
Motor U1Motor U2Motor U3Motor U4
-0.38rad
79rad/s
201.7rad
1.03m
Figura 10.6. Simulación cambiando las cuatro referencias de forma simultánea.
En las gráficas se muestra que el sistema se estabiliza en 3.8 segundos con los errores a cero, consiguiendo un tr = 0.75s y ts = 0.78s en el eje ‘X’, para el eje ‘Y’ se presenta un tr = 1.09s y ts = 1.19s, siendo el ángulo ‘Ψ’ el más rápido con un tr = 0.28s y ts = 0.29s, seguido del eje ‘Z’ con un tr = 0.86s y ts = 0.9s. El comportamiento de todos

Modelo y Control LQR de una aeronave de cuatro rotores
JUAN Mª DÍAZ CANO. 126
los ejes presenta una sobreoscilación, en el caso del eje ‘Z’ es del 2%, para el eje ‘Ψ’ es del 4%, el eje ‘Y’ es del 1% y para el eje ‘X’ es del 28%. Es necesario observar que el ángulo ‘θ’ y ‘φ’ alcanzan un máximo de 0.5rad y -0.38rad respectivamente.
10.2.3 Perturbaciones mantenidas.
Se simulará el Quad-Rotor aplicando de forma independiente perturbaciones que afectarán a las fuerzas de empuje U1, U2, U3 y U4. En el capítulo 2, ecuación 2.24, se obtuvieron las fuerzas de empujes máximas y mínimas que puede entregar el sistema propulsor. Teniendo en cuenta estos datos se calcularán las perturbaciones que se aplicarán.
Para realizar estas simulaciones, se partirá de un estado inicial donde todos los estados son cero y el eje ‘Z‘ será un metro y como punto final se marcará una referencia de 0.5m de amplitud en los ejes ‘Xr’, ‘Yr’ y ‘Zr’ y el ángulo‘Ψr’ tendrá una referencia de 0.1rad.
• Perturbaciones en la fuerza U1.
La fuerza U1 afecta principalmente al eje ‘Z’ y tiene unos límites de 0N el mínimo y 9.67N como máximo. En está simulación se aplicará una perturbación de 4N.
0 10 20 30 40 50 60 70 80 90 1001
1.2
1.4
1.6
1.8Posición Z (m)
Eje "Z"Referencia Z = 1.5m
0 10 20 30 40 50 60 70 80 90 1000
1
2
3
4Perturbación en U1 (N)
Tiempo (s)
1.63m
Figura 10.7. Simulación con perturbaciones en U1.
Como se aprecia en la figura 10.7, el control LQR diseñado es capaz de rechazar la perturbación aplicada, pero es necesario un tiempo excesivo. Este inconveniente se resolverá en el siguiente punto, utilizando en las simulaciones el controlador LQR

Modelo y Control LQR de una aeronave de cuatro rotores
JUAN Mª DÍAZ CANO. 127
diseñado en el punto 7.3.1.1, donde el efecto integral actúe de forma más rápida. También hay que decir que el sistema no se vuelve inestable en ningún momento.
• Perturbaciones en la fuerza U2.
La fuerza U2 afecta directamente al eje ‘Y’ y los límites de saturación son -0.57N el mínimo y 0.57N como máximo. Para realizar la simulación se aplicará una perturbación de 0.5N.
0 10 20 30 40 50 60 70 80 90 1000
0.2
0.4
0.6
0.8Posición Y (m)
Eje "Y"Referencia Y = 0.5m
0 10 20 30 40 50 60 70 80 90 1000
0.2
0.4
Perturbación en U2 (N)
Tiempo (s)
0.45m
0.5N
Figura 10.8. Simulación con perturbaciones en U2.
Como se ve en la figura 10.8, al igual que pasaba en la figura 10.7 y sucederá en las posteriores simulaciones, el sistema es capaz de rechazar la perturbación aplicada pero de forma lenta. De forma parecida a las anteriores simulaciones, el sistema no se vuelve inestable en ningún momento.
• Perturbaciones en la fuerza U3.
La fuerza U3 afecta directamente al eje ‘X’ y los límites de saturación son -0.57N el mínimo y 0.3N como máximo.
El comportamiento de los ejes ‘X’ e ‘Y’ y los límites de fuerza de empuje son iguales, por tanto la simulación del eje ‘X’ debería salir igual a la del eje ‘Y’, sólo que los motores afectados serán U1 y U3.
Como se ve en la figura 10.9, el comportamiento es similar al de la figura 10.8, alcanzando una máximo al aplicarle la perturbación de 0.05m. También es conveniente mencionar que el sistema no se vuelve inestable en ningún momento.

Modelo y Control LQR de una aeronave de cuatro rotores
JUAN Mª DÍAZ CANO. 128
0 10 20 30 40 50 60 70 80 90 1000
0.2
0.4
0.6
0.8Posición X (m)
Eje "X"Referencia X = 0.5m
0 10 20 30 40 50 60 70 80 90 1000
0.2
0.4
Perturbación en U3 (N)
Tiempo (s)
0.55m
0.5N
Figura 10.9. Simulación con perturbaciones en U3.
• Perturbaciones en la fuerza U4.
La fuerza U4 afecta directamente al ángulo ‘Ψ’ y los límites de saturación son -0.11N el mínimo y 0.11N como máximo. Para realizar la simulación se aplicará una perturbación de 0.1N.
0 10 20 30 40 50 60 70 80 90 1000
0.05
0.1
Ángulo Psi (rad)
Ángulo "Psi"Referencia Psi = 0.1rad
0 10 20 30 40 50 60 70 80 90 1000
0.05
0.1
0.15
0.2Perturbación en U4 (N)
Tiempo (s)
1.1rad
0.1N
Figura 10.10. Simulación con perturbaciones en U4.

Modelo y Control LQR de una aeronave de cuatro rotores
JUAN Mª DÍAZ CANO. 129
En la figura 10.10 se representa el ángulo ‘Ψ’ para estudiar su comportamiento cuando se le aplica una perturbación. Este eje al ser el más rápido, rechaza la perturbación en menos tiempo que los demás, pero también se diseñará el control LQR para que sea más rápido en rechazar la perturbación. Como ocurría en los casos anteriores, en ningún momento el sistema no se volverá inestable.
• Perturbaciones en la fuerza U1, U2, U3, U4.
Para terminar este bloque se realizará una simulación donde se aplique perturbaciones en todas las variables de empuje Ui y se aumentarán los escalones de referencias a todas las variables, ‘Xr’ e ‘Yr’ un escalón de amplitud 1m, a ‘Zr’ un escalón de 2m y el ángulo‘Ψr’ una referencia de 0.26rad. De esta manera, se comprobará cómo se comporta el control LQR cuando se le exige el máximo. Las perturbaciones aplicadas a U1, U2, U3 y U4 serán respectivamente 2N, 0.25N, 0.25N y 0.02N.
0 5 10 15 20 25 30 35 400
0.5
1
1.5
2
2.5Posición X, Y y Z (m)
Eje "X"Referencia X e YEje "Y"Eje "Z"Referencia Z
0 5 10 15 20 25 30 35 40-0.5
0
0.5
Ángulo Theta, Phi y Psi (rad)
Ángulo ThetaÁngulo PhiÁngulo PsiReferencia Psi
0 5 10 15 20 25 30 35 400
1
2Perturbación en U1, U2, U3 y U4 (N)
Perturbación U1Perturbación U2, U3Perturbación U4
0 5 10 15 20 25 30 35 400
100
200
300Velocidad motores 1, 2, 3, 4 (rad/s)
Tiempo (s)
Motor U1Motor U2Motor U3Motor U4
2.1m
1.2m
0.94m
0.58rad
-0.48rad
0.3rad
0.26rad
0.02N0.25N
2N
220rad/s 187.2rad/s
120rad/s
32.6rad/s
Figura 10.11. Simulación con perturbaciones en U1, U2, U3, U4.

Modelo y Control LQR de una aeronave de cuatro rotores
JUAN Mª DÍAZ CANO. 130
En la figura 10.11 se representa las variables ‘X’, ‘Y’ y ‘Z’, los ángulos ‘θ’, ‘φ’ y‘Ψ’ y la velocidades angulares de los motores.
Los estados ‘X’, ‘Y’ y ‘Z’ y el ángulo‘Ψ’ alcanzan los valores impuestos en la referencia, en cuatro segundos el sistema tiene controlado las perturbaciones y las va suprimiendo. Los ángulos alcanzan un valor máximo de 0.58 rad (33º) en el caso del ángulo ‘θ’ y para el ángulo ‘φ’ un valor de -0.48rad.
10.2.4 Perturbaciones mantenidas (LQR integral “con mayor ponderación”).
Como se ha comprobado en las simulaciones anteriores, el controlador tenía un valor bajo de ponderación del efecto integral, por ello las perturbaciones las rechazaba de forma lenta. Para solucionar este problema se diseñó en el capítulo 7, apartado 7.3.1.1, un nuevo controlador que será el que se aplique en las simulaciones de este apartado, comprobando el comportamiento ante el rechazo de perturbaciones.
Se simulará el Quad-Rotor aplicando de forma independiente perturbaciones que afectarán a las fuerzas de empuje U1, U2, U3 y U4. En el capítulo 2, ecuación 2.24, se obtuvieron las fuerzas de empujes máximas y mínimas que puede entregar el sistema propulsor, teniendo en cuenta estos datos se calcularán las perturbaciones que se aplicarán.
Para realizar estas simulaciones, se partirá de un estado inicial donde todos los estados son cero y el eje ‘Z‘ será un metro y como punto final se marcará una referencia de amplitud 0.5m en los ejes ‘Xr’, ‘Yr’ y ‘Zr’ y el ángulo‘Ψr’ tendrá una referencia de amplitud 0.1rad.

Modelo y Control LQR de una aeronave de cuatro rotores
JUAN Mª DÍAZ CANO. 131
• Perturbaciones en la fuerza U1.
La fuerza U1 afecta principalmente al eje ‘Z’ y tiene unos límites de 0N el mínimo y 9.67N como máximo. En está simulación se aplicará una perturbación de 4N.
Como se ve en la figura 10.12, el control LQR diseñado es capaz de rechazar la perturbación aplicada más rápido que el controlador LQR estudiado en el apartado anterior. Al aplicar la perturbación aparece una sobreoscilación del 11% y el tiempo de establecimiento se encuentra a los 2.26s. También hay que decir que el sistema no se vuelve inestable en ningún momento.
0 5 10 151
1.05
1.1
1.15Posición Z (m)
0 5 10 150
1
2
3
4Perturbación en U1 (N)
0 5 10 150
100
200
300Velocidad motores 1, 2, 3, 4 (rad/s)
Tiempo (s)
Motor U1Motor U2Motor U3Motor U4
Eje "Z"Referencia 1m
4N
93.7rad/s
1.11m
5% de la referencia
Figura 10.12. Simulación con perturbaciones en U1.

Modelo y Control LQR de una aeronave de cuatro rotores
JUAN Mª DÍAZ CANO. 132
• Perturbaciones en la fuerza U2.
La fuerza U2 afecta directamente al eje ‘Y’ y los limites de saturación son -0.57N el mínimo y 0.57N como máximo. Para realizar la simulación se aplicará una perturbación de 0.5N.
0 5 10 150.94
0.96
0.98
1Posición Y (m)
Eje "Y"Referencia 1m
0 5 10 150
0.2
0.4
0.6
0.8Perturbación en U2 (N)
0 5 10 150
100
200
300Velocidad motores 1, 2, 3, 4 (rad/s)
Tiempo (s)
Motor U1Motor U2Motor U3Motor U4
0.5N
273.3rad/s
0.957m
5% de la referencia
81.9rad/s
Figura 10.13. Simulación con perturbaciones en U2.
Como se ve en la figura 10.13, el control LQR diseñado es capaz de rechazar la perturbación aplicada de forma más rápida que en el controlador LQR estudiado en el apartado anterior. Al aplicar la perturbación aparece una sobreoscilación del -4.3% y el sistema siempre se encuentra dentro de los límites del error, por lo que el sistema está estabilizado. Además, se puede mencionar que el sistema no se vuelve inestable en ningún momento.

Modelo y Control LQR de una aeronave de cuatro rotores
JUAN Mª DÍAZ CANO. 133
• Perturbaciones en la fuerza U3.
La fuerza U3 afecta directamente al eje ‘X’ y los límites de saturación son -0.57N el mínimo y 0.3N como máximo.
El comportamiento de los ejes ‘X’ e ‘Y’ y los límites de fuerza de empuje son iguales, por tanto la simulación del eje ‘X’ debería salir igual a la del eje ‘Y’, sólo cambiaría que los motores afectados serán U1 y U3.
Como se ve en la figura 10.14, el comportamiento es similar al de la figura 10.13, alcanzando una sobreoscilación del 4.3% al aplicarle la perturbación de 0.5N. Hay que decir que el sistema no se vuelve inestable en ningún momento y que el valor del eje ‘X’ se encuentra dentro le los límites del intervalo de error.
0 5 10 151
1.02
1.04
1.06Posición X (m)
Eje "X"Referencia 1m
0 5 10 150
0.5
1Perturbación en U3 (N)
0 5 10 150
100
200
300Velocidad motores 1, 2, 3, 4 (rad/s)
Tiempo (s)
Motor U1Motor U2Motor U3Motor U4
273.3rad/s
0.5N
1.043m
5% de la referencia
81.9rad/s
Figura 10.14. Simulación con perturbaciones en U3.
• Perturbaciones en la fuerza U4.

Modelo y Control LQR de una aeronave de cuatro rotores
JUAN Mª DÍAZ CANO. 134
La fuerza U4 afecta directamente al ángulo ‘Ψ’ y los limites de saturación son -0.11N el mínimo y 0.11N como máximo. Para realizar la simulación se aplicará una perturbación de 0.1N.
0 5 10 150.1
0.105
0.11
0.115
Ángulo Psi (rad)
Ángulo "Psi"Referencia 0.1rad
0 5 10 150
0.05
0.1Perturbación en U4 (N)
0 5 10 150
100
200
300Velocidad motores 1, 2, 3, 4 (rad/s)
Tiempo (s)
Motor U1Motor U2Motor U3Motor U4
271.1rad/s
0.1N
0.11rad
5% de la referencia
85.8rad/s
Figura 10.15. Simulación con perturbaciones en U4.
En la figura 10.15, se representa el ángulo ‘Ψ’ para estudiar su comportamiento cuando se le aplica una perturbación a los dos segundos, provocando una sobreoscilación del 1%. Al ser el eje más rápido rechaza la perturbación en menos tiempos que los demás, teniendo un tiempo de establecimiento de 2s. El sistema no se volverá inestable en ningún momento.
• Perturbaciones en la fuerza U1, U2, U3, U4.
Para terminar este apartado se realizará una simulación donde se aplique perturbaciones en todas las variables de empuje Ui y se aumentarán los escalones de referencias a todas las variables, ‘Xr’ e ‘Yr’ un escalón de amplitud 1m, a ‘Zr’ un escalón de 2m y el ángulo‘Ψr’ una referencia de 0.26rad. De esta forma, se comprobará cómo se comporta el control LQR cuando se le exige el máximo. Las perturbaciones aplicadas a U1, U2, U3 y U4 serán respectivamente 2N, 0.25N, 0.25N y 0.02N.

Modelo y Control LQR de una aeronave de cuatro rotores
JUAN Mª DÍAZ CANO. 135
0 5 10 15
1
1.5
2
Posición X, Y y Z (m)
Eje "X"Referencia X e YEje "Y"Eje "Z"Referencia Z
0 5 10 15
0
0.1
0.2
Ángulo Theta, Phi y Psi (rad)
Ángulo ThetaÁngulo PhiÁngulo PsiReferencia Psi
0 5 10 150
0.5
1
1.5
2Perturbación en U1, U2, U3 y U4 (N)
Perturbación U1Perturbación U2, U3Perturbación U4
0 5 10 150
100
200
300Velocidad motores 1, 2, 3, 4 (rad/s)
Tiempo (s)
Motor U1Motor U2Motor U3Motor U4
2m2.1m
1.09m
0.92m
0.27rad
2N
0.25N 0.02N
0.26rad
Figura 10.16. Simulación con perturbaciones en U1, U2, U3, U4.
En la figura 10.16 se representa las variables ‘X’, ‘Y’ y ‘Z’, los ángulos ‘θ’, ‘φ’ y‘Ψ’ y la velocidades angulares de los motores.
Al aplicarle las perturbaciones, todos los ejes sufren una sobreoscilación. Para el eje ‘Z’ es del 10%, para el eje ‘X’ es del 9% y del 8% en el eje ’Y’. Por último, en el eje ‘Ψ’ la sobreoscilación es del 1%. En cuatro segundos el sistema tiene controlado las perturbaciones y las va suprimiendo.

Modelo y Control LQR de una aeronave de cuatro rotores
JUAN Mª DÍAZ CANO. 136
10.3 Simulaciones con el Modelo completo.
El modelo que se simulará es el de la figura 10.18, en este caso está incluida la dinámica de los motores. Se elegirán como entradas cuatro señales de referencia ‘xr’, ‘yr’, ‘zr’, ‘Ψr’, cuyos valores serán modificados con forma de escalón y las salidas que se representan son ‘X’, ‘y’, ‘z’, ‘φ’, ‘θ’, ‘Ψ’.
Los estados X13, X14, X15, X16, corresponden a la integral del error en posición de los estados (^) X1, X3, X5, X11,
Figura 10.18. Modelo completo con controlador LQR.
El controlador LQR escogido para estudiar el comportamiento en simulación será el hallado en el capítulo 7, apartado 7.3.1. A este LQR se le aplicarán cambios en las señales de entrada de forma individual, donde los escalones aplicados serán de 0.5m de amplitud en las referencias ‘Xr’, ‘Yr’, ‘Zr’ y 0.26rad (15º) de amplitud en la referencia ‘Ψr’.
Posteriormente se realizarán unas simulaciones cambiando simultáneamente las referencias en varios ejes y también se estudiará en el punto siguiente, cómo se comporta el controlador LQR ante perturbaciones.
10.3.1 Cambio de la referencia en un eje.
Se comenzará variando las referencias de los ejes ‘Xr’, ‘Yr’, ‘Zr’ con amplitudes de 0.5m y la referencia ‘Ψr’ con amplitudes de 0.26rad (15º).
Se estudiará dos puntos de funcionamiento, el primero cuando el Quad-Rotor parta del punto inicial con los motores parados, ‘Z = 0’, y el segundo cuando el sistema se encuentre en un punto de trabajo con los motores funcionando, ‘Z > 0’.
En estas simulaciones no se tiene en cuenta el efecto suelo, por tanto, la referencia ‘Z = 0’ sólo corresponde a una posición en la cual los motores están parados. Un resultado de ‘Z < 0’ indicaría que el Quad-Rotor no se levanta del suelo, pero en el primer punto de funcionamiento servirá para comprobar cómo afecta la dinámica de los motores en el despegue.

Modelo y Control LQR de una aeronave de cuatro rotores
JUAN Mª DÍAZ CANO. 137
• Escogiendo como punto inicial todos los estados a cero.
0 0.5 1 1.5 2 2.5 3-0.2
0
0.2
0.4
0.6Posición Z (m)
Tiempo (s)
Eje "Z"Referencia 0.5m
0 0.5 1 1.5 2 2.5 30
100
200
300Velocidad motores 1, 2, 3, 4 (rad/s)
Tiempo (s)
Motor U1Motor U2Motor U3Motor U4
1cm0.52m
124.8rad/s
201.7rad/s
Figura 10.19. Simulación cambiando la referencia del eje ‘Z’ en 0.5 metros.
En la figura 10.19 se muestra como el sistema parte de un punto inicial ‘Z = 0’ hasta el valor aplicado en la referencia (0.5 metros). El valor de la referencia lo alcanza en 1.2 segundos, 0.2 segundos más que el modelo reducido de la figura 10.2, con una sobreoscilación del 2%. El eje ‘Z’ presenta un tiempo de subida de 0.5s y ts = 0.53s. Además, en esta gráfica, se puede ver cómo los motores parten desde 0 rad/s y la saturación la alcanzan en 0.15 segundos, por lo que la posición en el eje ‘Z’ desciende un centímetro por debajo de cero, debido a la dinámica de los motores.
En la gráfica de las velocidades, los motores sólo se saturan durante 10ms.
• Escogiendo como punto inicial todos los estados a cero y ‘Z = 1’.
En esta simulación se representará la posición del eje ‘X’, el ángulo ‘θ’, la posición del eje ‘Z’ y las velocidades de los motores.
En la figura 10.20 se describe el comportamiento del Quad-Rotor cuando se cambia la referencia en el eje ‘X’, pasando de la posición cero a 0.5 metros. El ángulo afectado en este desplazamiento (desplazamiento en el eje ‘X’) es ‘θ’ y de forma indirecta también afecta a la posición ‘Z’, ya que la propulsión de los motores no es perpendicular al suelo y el sistema pierde fuerza de empuje.

Modelo y Control LQR de una aeronave de cuatro rotores
JUAN Mª DÍAZ CANO. 138
0 0.5 1 1.5 2 2.5 3 3.5 4 4.5 50
0.2
0.4
Posición X (m)
Eje "X"Referencia 0.5m
0 0.5 1 1.5 2 2.5 3 3.5 4 4.5 5-0.2
0
0.2
Ángulo Theta (rad)
0 0.5 1 1.5 2 2.5 3 3.5 4 4.5 50.9
0.95
1
Posición Z (m)
Eje "Z"Referencia
0 0.5 1 1.5 2 2.5 3 3.5 4 4.5 50
100
200
300Velocidad motores 1, 2, 3, 4 (rad/s)
Tiempo (s)
Motor U1Motor U2Motor U3Motor U4
201.7rad/s
0.91m
0.31rad
-0.1rad
0.51m
Figura 10.20. Simulación cambiando la referencia del eje ‘X’ en 0.5 metros.
El sistema en 2.5 segundos alcanza la referencia con el error a cero y con una sobreoscilación del 1%, consiguiendo un tiempo de subida de 0.97s y un tiempo de establecimiento de 1.05s. Además el ángulo ‘θ’ alcance un máximo de 0.31rad, más que en el modelo reducido (0.24rad). La posición en el eje ‘Z’ del modelo completo desciende 9 centímetros, existiendo una diferencia considerable entre el modelo reducido cuyo descenso es de 0.4cm. Otro dato interesante es que los motores no se saturan, consiguiendo una velocidad angular máxima de 270rad/s.
En la siguiente simulación se representará la posición del eje ‘Y’, el ángulo ‘φ’, la posición del eje ‘Z’ y las velocidades de los motores.
En la figura 10.21 se muestra el comportamiento del Quad-Rotor cuando se cambia la referencia en el eje ‘Y’, pasando de la posición cero a 0.5 metros. En este

Modelo y Control LQR de una aeronave de cuatro rotores
JUAN Mª DÍAZ CANO. 139
caso, el ángulo ‘φ’ afecta al desplazamiento en el eje ‘Y’ y de forma indirecta, al igual que ocurría en el caso anterior, también afecta a la posición ‘Z’ por el mismo motivo.
0 0.5 1 1.5 2 2.5 3 3.5 4 4.5 50
0.2
0.4
Posición Y (m)
Eje "Y"Referencia 0.5m
0 0.5 1 1.5 2 2.5 3 3.5 4 4.5 5
-0.2
0
0.2Ángulo Phi (rad)
0 0.5 1 1.5 2 2.5 3 3.5 4 4.5 50.9
0.95
1
Posición Z (m)
Eje "Z"Referencia
0 0.5 1 1.5 2 2.5 3 3.5 4 4.5 50
100
200
300Velocidad motores 1, 2, 3, 4 (rad/s)
Tiempo (s)
Motor U1Motor U2Motor U3Motor U4
201.7rad/s
0.91m
-0.31rad
0.1rad
0.51m
Figura 10.21. Simulación cambiando la referencia del eje ‘Y’ en 0.5 metros.
En la gráfica aparece un comportamiento similar al de la figura 10.20. Esto indica que el eje ‘X’ e ‘Y’ tienen un comportamiento parecido, consiguiendo alcanzar la referencia en dos segundos, con un tiempo de subida de 0.97s y un tiempo de establecimiento de 1.05s. Llevando el ángulo ‘θ’ a un máximo de -0.31rad. La posición en el eje ‘Z’ cae nueve centímetros, las velocidades angulares de los motores tienen un máximo en 270rad/s y no se saturan.
En esta última simulación se representará el ángulo ‘Ψ’, la posición del eje ‘Z’ y las velocidades de los motores.

Modelo y Control LQR de una aeronave de cuatro rotores
JUAN Mª DÍAZ CANO. 140
En la figura 10.22 se representa el comportamiento del Quad-Rotor cuando se cambia la referencia en el eje ‘Ψ’ (eje de giro sobre sí mismo), pasando de la posición inicial cero a 0.26 radianes. En este caso, el ángulo ‘Ψ’ afecta de forma indirecta a la posición ‘Z’, como sucedía en el eje ‘X’ e ‘Y’. Este fenómeno sucede porque para girar sobre sí mismo existen motores que bajan su velocidad y no se ejerce la fuerza de empuje necesaria para mantener la altura.
0 0.5 1 1.5 2 2.5 30
0.1
0.2
0.3
0.4Ángulo Psi (rad)
Angulo "PSI"Referencia 0.26rad
0 0.5 1 1.5 2 2.5 30.7
0.8
0.9
1
1.1Posición Z (m)
Eje "Z"Referencia
0 0.5 1 1.5 2 2.5 30
100
200
300Velocidad motores 1, 2, 3, 4 (rad/s)
Tiempo (s)
Motor U1Motor U2Motor U3Motor U4
0.27rad
0.77rad
201.7rad/s
Figura 10.22. Simulación cambiando la referencia del ángulo’Ψ’ en 0.26 radianes (15º).
El modelo alcanza la referencia de 0.26rad en 0.5 segundos con los errores a cero, presenta un tiempo de subida de 0.27s y un tiempo de establecimiento de 0.29s. El ángulo ‘Ψ’ presenta una sobreoscilación del 1%, hecho que no sucedía en el modelo reducido. Comparando el eje ‘Z’ de la gráfica 10.22 y el de la gráfica 10.5, en el modelo completo el eje ‘Z’ desciende 13cm, mientras que en el reducido solamente desciende 2cm. Una vez más, esto sucede por la dinámica de los motores.
10.3.2 Cambio de la referencia en varios ejes.
Se realizarán dos simulaciones en las cuales se variarán de forma simultánea las referencias de las entradas ‘Xr’, ‘Yr’, ‘Zr’ con amplitudes de 0.75m, 1m, 1m y la referencia ‘Ψr’ con amplitudes de 0.26rad (15º).

Modelo y Control LQR de una aeronave de cuatro rotores
JUAN Mª DÍAZ CANO. 141
• Escogiendo como punto inicial todos los estados a cero y ‘Z = 1’.
En esta simulación se representará las posiciones de los ejes ‘X’ e ‘Y’, los ángulos ‘θ’, ‘φ’ y‘φ’, la posición del eje ‘Z’ y las velocidades de los motores.
En la figura 10.23 se muestra el resultado de esta simulación. Hay que recordar que el controlador que se usa en las simulaciones está diseñado para escalones de 0.5m en los ejes ‘X’, ‘Y’, ‘Z’ y un escalón de 0.1rad en el ángulo‘Ψ’. En esta simulación se aplican escalones de referencias superiores a las utilizadas en el diseño, por ello pueden existir variaciones en el comportamiento del sistema.
0 1 2 3 4 5 6 70
0.5
1
Posición X e Y (m)
Eje "X"Referencia XEje "Y"Referencia Y
0 1 2 3 4 5 6 7
-0.5
0
0.5
Ángulo Theta, Phi y Psi (rad)
Ángulo ThetaÁngulo PhiÁngulo PsiReferencia Psi
0 1 2 3 4 5 6 7
1
1.5
2
Posición Z (m)
Eje "Z"Referencia 2m
0 1 2 3 4 5 6 70
100
200
300Velocidad motores 1, 2, 3, 4 (rad/s)
Tiempo (s)
Motor U1Motor U2Motor U3Motor U4
0.91m 0.75m
0.26rad
0.67rad
0.85m
201.7rad/s
0.34rad
1m
Figura 10.23. Simulación cambiando las cuatro referencias de forma simultánea.

Modelo y Control LQR de una aeronave de cuatro rotores
JUAN Mª DÍAZ CANO. 142
En la gráfica 10.23 se aprecia que el sistema se estabiliza en 3.3 segundos, sistema más rápido que el modelo reducido, figura 10.6. El comportamiento de los ejes ‘X’ e ‘Y’ son distintos en ambos modelos, “completo y reducido”, radicando la diferencia en los valores de los ángulos ‘θ’ y ‘φ’, ya que en el modelo completo alcanza un máximo de 0.67rad y -0.48rad respectivamente y en el reducido alcanzaba 0.5rad y -0.38. Otro factor que determina esta diferencia es el eje ‘Z’, donde cae 15cm en el modelo completo y no es así en el modelo reducido. Comparando los distintos ejes, el ángulo ‘Ψ’ es el más rápido, seguido del eje ‘Z’.
10.3.3 Perturbaciones mantenidas.
Se simulará el Quad-Rotor aplicando de forma independiente perturbaciones que afectarán a las fuerzas de empuje U1, U2, U3 y U4. Estas fuerzas se obtuvieron en el capítulo 2, ecuación 2.24, donde se calcularon las fuerzas de empujes máximas y mínimas que puede entregar el sistema propulsor. Teniendo en cuenta estos datos se calcularán las perturbaciones que se aplicarán.
Para realizar estas simulaciones, se partirá de un punto inicial donde todos los estados son cero y el eje ‘Z’ será un metro. Como punto final se marcará una referencia de ‘Xr’, ‘Yr’ y ‘Zr’ un escalón de amplitud 0.5m y el ángulo‘Ψr’ una referencia de 0.1rad.
• Perturbaciones en la fuerza U1.
La fuerza U1 afecta principalmente al eje ‘Z’ y tiene unos límites de 0N el mínimo y 9.67N como máximo. En está simulación se aplicará una perturbación de 4N y -3N.
Como se ve en la figura 10.24 y, al igual que sucedía en el modelo reducido de la figura 10.7, el control LQR diseñado es capaz de rechazar la perturbación aplicada, pero es necesario un tiempo excesivo. Este inconveniente se resolverá en el capítulo siguiente, diseñando un controlador LQR donde el efecto integral actúe de forma más rápida. También hay que comentar que el sistema no se vuelve inestable en ningún momento.

Modelo y Control LQR de una aeronave de cuatro rotores
JUAN Mª DÍAZ CANO. 143
0 10 20 30 40 50 60 70 80 90 100
1
1.2
1.4
1.6
Posición Z (m)
Eje "Z"Referencia 1.5m
0 10 20 30 40 50 60 70 80 90 1000
2
4Perturbación en U1 (N)
0 10 20 30 40 50 60 70 80 90 1000
100
200
300Velocidad motores 1, 2, 3, 4 (rad/s)
Tiempo (s)
Motor U1Motor U2Motor U3Motor U4
1.63m
93.5rad/s
1.54m
Figura 10.24. Simulación con perturbaciones en U1.
• Perturbaciones en la fuerza U2.
La fuerza U2 afecta directamente al eje ‘Y’ y los límites de saturación son -0.57N el mínimo y 0.57N como máximo. Para realizar la simulación se aplicará una perturbación de 0.5N y -0.3N a los dos segundos.
En la figura 10.25 se comprueba que en el momento que se aplica la perturbación, la posición del eje ‘Y’ se ve afectada. En ese instante es a partir del cual se comienza a eliminar la perturbación, pero como sucedía en el eje ‘Z’, se realizará de forma lenta.
En la figura 10.8, en el modelo reducido, cuando se aplica la perturbación, el eje ‘Y’ no se ve afectado en el transitorio como el completo, que tiene una oscilación que lleva el eje ‘Y’ a 0.4m.

Modelo y Control LQR de una aeronave de cuatro rotores
JUAN Mª DÍAZ CANO. 144
0 10 20 30 40 50 60 70 80 90 1000
0.2
0.4
Posición Y (m)
Eje "Y"Referencia 0.5m
0 10 20 30 40 50 60 70 80 90 1000
0.5
1Perturbación en U2 (N)
0 10 20 30 40 50 60 70 80 90 1000
100
200
300Velocidad motores 1, 2, 3, 4 (rad/s)
Tiempo (s)
Motor U1Motor U2Motor U3Motor U4
0.45m0.46m
81.9rad/s
273.3rad/s
Figura 10.25. Simulación con perturbaciones en U2.
• Perturbaciones en la fuerza U3.
La fuerza U3 afecta directamente al eje ‘X’ y los límites de saturación son -0.57N el mínimo y 0.57N como máximo.
El comportamiento de los ejes ‘X’ e ‘Y’ y los límites de fuerza de empuje son iguales, por tanto la simulación del eje ‘X’ debería salir igual a la del eje ‘Y’, la única variación sería que los motores afectados son U1 y U3. Esto sería así si no se cambiase la referencia del ángulo ‘Ψ’. Como en este caso la referencia Ψr es 0.1rad, aparece en el eje ‘X’ una sobreoscilación. La sobreoscilación es mayor porque el valor de la perturbación favorece que se desplace en esa dirección del eje ‘X’, siendo ésta la diferencia existente entre ambas gráficas ‘X’ e ‘Y’, figura 10.26 y 10.25 respectivamente.
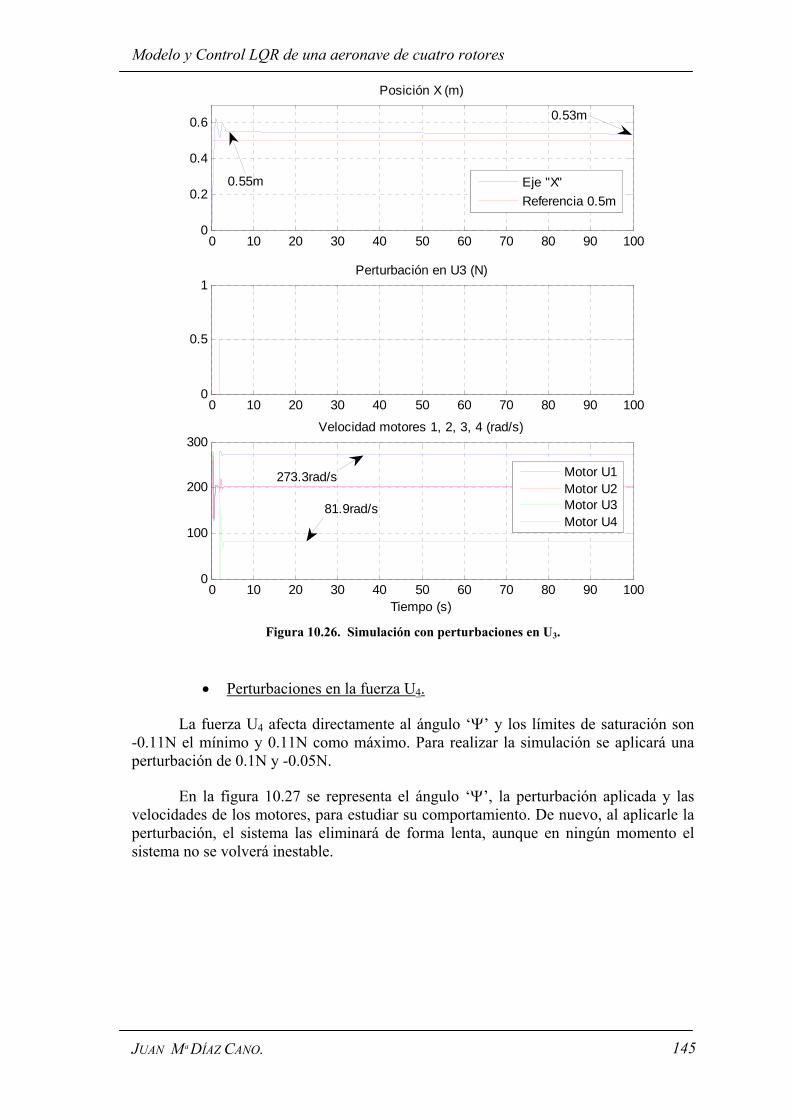
Modelo y Control LQR de una aeronave de cuatro rotores
JUAN Mª DÍAZ CANO. 145
0 10 20 30 40 50 60 70 80 90 1000
0.2
0.4
0.6
Posición X (m)
Eje "X"Referencia 0.5m
0 10 20 30 40 50 60 70 80 90 1000
0.5
1Perturbación en U3 (N)
0 10 20 30 40 50 60 70 80 90 1000
100
200
300Velocidad motores 1, 2, 3, 4 (rad/s)
Tiempo (s)
Motor U1Motor U2Motor U3Motor U4
0.55m
0.53m
81.9rad/s
273.3rad/s
Figura 10.26. Simulación con perturbaciones en U3.
• Perturbaciones en la fuerza U4.
La fuerza U4 afecta directamente al ángulo ‘Ψ’ y los límites de saturación son -0.11N el mínimo y 0.11N como máximo. Para realizar la simulación se aplicará una perturbación de 0.1N y -0.05N.
En la figura 10.27 se representa el ángulo ‘Ψ’, la perturbación aplicada y las velocidades de los motores, para estudiar su comportamiento. De nuevo, al aplicarle la perturbación, el sistema las eliminará de forma lenta, aunque en ningún momento el sistema no se volverá inestable.
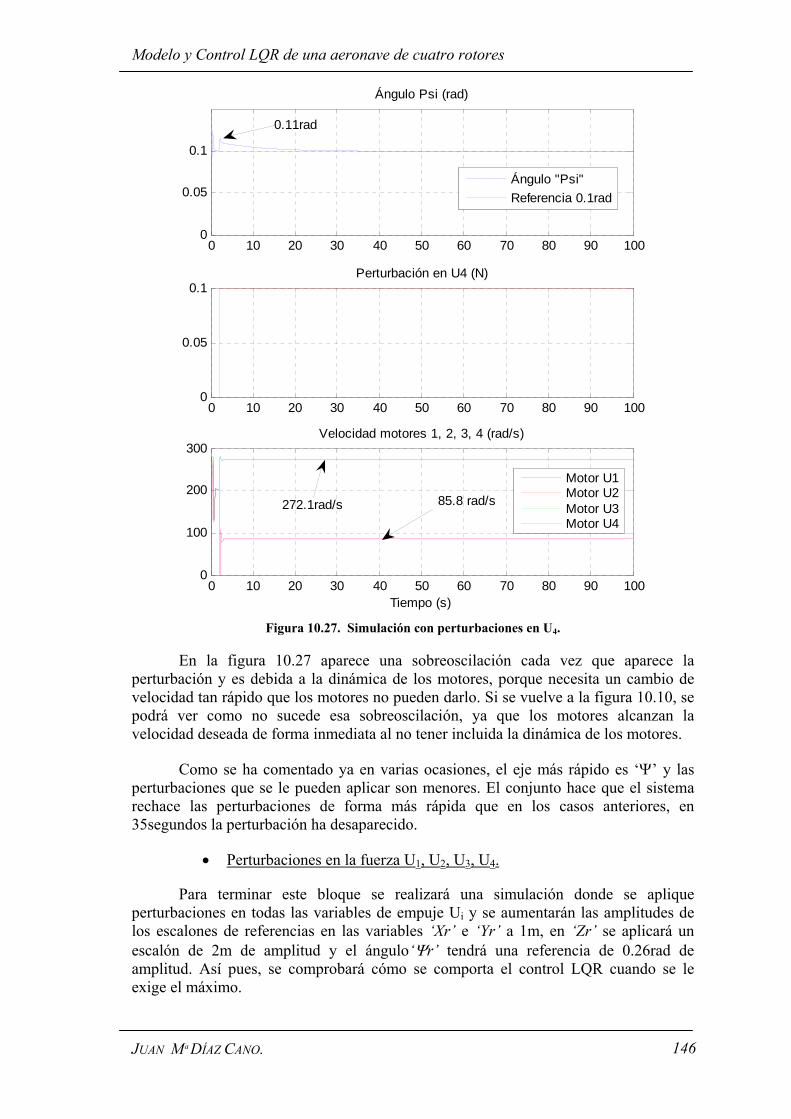
Modelo y Control LQR de una aeronave de cuatro rotores
JUAN Mª DÍAZ CANO. 146
0 10 20 30 40 50 60 70 80 90 1000
0.05
0.1
Ángulo Psi (rad)
Ángulo "Psi"Referencia 0.1rad
0 10 20 30 40 50 60 70 80 90 1000
0.05
0.1Perturbación en U4 (N)
0 10 20 30 40 50 60 70 80 90 1000
100
200
300Velocidad motores 1, 2, 3, 4 (rad/s)
Tiempo (s)
Motor U1Motor U2Motor U3Motor U4
0.11rad
272.1rad/s 85.8 rad/s
Figura 10.27. Simulación con perturbaciones en U4.
En la figura 10.27 aparece una sobreoscilación cada vez que aparece la perturbación y es debida a la dinámica de los motores, porque necesita un cambio de velocidad tan rápido que los motores no pueden darlo. Si se vuelve a la figura 10.10, se podrá ver como no sucede esa sobreoscilación, ya que los motores alcanzan la velocidad deseada de forma inmediata al no tener incluida la dinámica de los motores.
Como se ha comentado ya en varias ocasiones, el eje más rápido es ‘Ψ’ y las perturbaciones que se le pueden aplicar son menores. El conjunto hace que el sistema rechace las perturbaciones de forma más rápida que en los casos anteriores, en 35segundos la perturbación ha desaparecido.
• Perturbaciones en la fuerza U1, U2, U3, U4.
Para terminar este bloque se realizará una simulación donde se aplique perturbaciones en todas las variables de empuje Ui y se aumentarán las amplitudes de los escalones de referencias en las variables ‘Xr’ e ‘Yr’ a 1m, en ‘Zr’ se aplicará un escalón de 2m de amplitud y el ángulo‘Ψr’ tendrá una referencia de 0.26rad de amplitud. Así pues, se comprobará cómo se comporta el control LQR cuando se le exige el máximo.
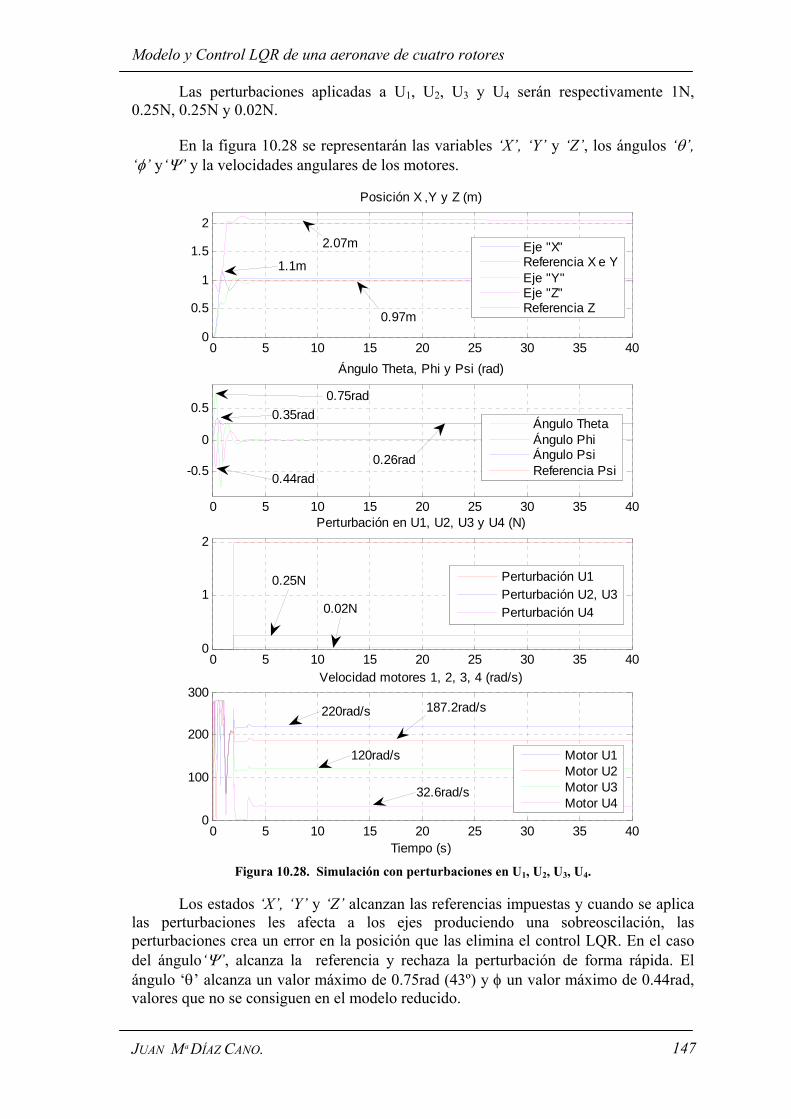
Modelo y Control LQR de una aeronave de cuatro rotores
JUAN Mª DÍAZ CANO. 147
Las perturbaciones aplicadas a U1, U2, U3 y U4 serán respectivamente 1N, 0.25N, 0.25N y 0.02N.
En la figura 10.28 se representarán las variables ‘X’, ‘Y’ y ‘Z’, los ángulos ‘θ’, ‘φ’ y‘Ψ’ y la velocidades angulares de los motores.
0 5 10 15 20 25 30 35 400
0.5
1
1.5
2
Posición X ,Y y Z (m)
0 5 10 15 20 25 30 35 40
-0.5
0
0.5
Ángulo Theta, Phi y Psi (rad)
0 5 10 15 20 25 30 35 400
1
2Perturbación en U1, U2, U3 y U4 (N)
0 5 10 15 20 25 30 35 400
100
200
300Velocidad motores 1, 2, 3, 4 (rad/s)
Tiempo (s)
Eje "X"Referencia X e YEje "Y"Eje "Z"Referencia Z
Ángulo ThetaÁngulo PhiÁngulo PsiReferencia Psi
Perturbación U1Perturbación U2, U3Perturbación U4
Motor U1Motor U2Motor U3Motor U4
2.07m
0.97m
0.75rad
0.25N
0.02N
220rad/s
120rad/s
187.2rad/s
32.6rad/s
0.26rad0.44rad
0.35rad
1.1m
Figura 10.28. Simulación con perturbaciones en U1, U2, U3, U4.
Los estados ‘X’, ‘Y’ y ‘Z’ alcanzan las referencias impuestas y cuando se aplica las perturbaciones les afecta a los ejes produciendo una sobreoscilación, las perturbaciones crea un error en la posición que las elimina el control LQR. En el caso del ángulo‘Ψ’, alcanza la referencia y rechaza la perturbación de forma rápida. El ángulo ‘θ’ alcanza un valor máximo de 0.75rad (43º) y φ un valor máximo de 0.44rad, valores que no se consiguen en el modelo reducido.

Modelo y Control LQR de una aeronave de cuatro rotores
JUAN Mª DÍAZ CANO. 148
10.3.4 Perturbaciones mantenidas (LQR integral “con mayor ponderación”).
Como se ha comprobado en las simulaciones anteriores, el controlador tenía poco ponderado el efecto integral, por ello las perturbaciones las rechazaba de forma lenta. Para solucionar este problema se diseñó en el capítulo 7, apartado 7.3.1.1, un nuevo controlador, que será el que se aplique en las simulaciones de este apartado, comprobando el comportamiento ante el rechazo de perturbaciones.
Se simulará el Quad-Rotor aplicando de forma independiente perturbaciones que afectarán a las fuerzas de empuje U1, U2, U3 y U4. En el capítulo 2, ecuación 2.24, se obtuvieron las fuerzas de empujes máximas y mínimas que puede entregar el sistema propulsor. Teniendo en cuenta estos datos se calcularán las perturbaciones que se aplicarán.
Para realizar estas simulaciones, se partirá de un estado inicial donde todos los estados son cero y el eje ‘Z‘ será un metro y como punto final se marcará una referencia de amplitud 0.5m en los ejes ‘Xr’, ‘Yr’ y ‘Zr’ y el ángulo‘Ψr’ tendrá una referencia de amplitud 0.1rad.
• Perturbaciones en la fuerza U1.
La fuerza U1 afecta principalmente al eje ‘Z’ y tiene unos límites de 0N el mínimo y 9.67N como máximo. En está simulación se aplicará una perturbación de 4N.
Como se ve en la figura 10.29, el control LQR diseñado es capaz de rechazar la perturbación aplicada más rápido que el controlador LQR estudiado en el apartado anterior. Al aplicar la perturbación aparece una sobreoscilación del 11% y el tiempo de establecimiento se encuentra a los 2.26s. También hay que decir que el sistema no se vuelve inestable en ningún momento.

Modelo y Control LQR de una aeronave de cuatro rotores
JUAN Mª DÍAZ CANO. 149
0 5 10 151
1.05
1.1
1.15Posición Z (m)
Eje "Z"Referencia 1m
0 5 10 150
2
4Perturbación en U1 (N)
0 5 10 150
100
200
300Velocidad motores 1, 2, 3, 4 (rad/s)
Tiempo (s)
Motor U1Motor U2Motor U3Motor U4
4N
93.7rad/s
1.11m
5% de la referencia
Figura 10.29. Simulación con perturbaciones en U1.
• Perturbaciones en la fuerza U2.
La fuerza U2 afecta directamente al eje ‘Y’ y los limites de saturación son -0.57N el mínimo y 0.57N como máximo. Para realizar la simulación se aplicará una perturbación de 0.5N.
Como se ve en la figura 10.30, el sistema es capaz de rechazar la perturbación aplicada en un tiempo de 1.4s, correspondiente al tiempo de establecimiento y crea una sobreoscilación del 10%, a diferencia del modelo reducido con un valor de ts = 0 y una Mp = 4.3%. El sistema no se vuelve inestable en ningún momento.

Modelo y Control LQR de una aeronave de cuatro rotores
JUAN Mª DÍAZ CANO. 150
0 5 10 150.9
0.95
1Posición Y (m)
Eje "Y"Referencia 1m
0 5 10 150
0.5
1Perturbación en U2 (N)
0 5 10 150
100
200
300Velocidad motores 1, 2, 3, 4 (rad/s)
Tiempo (s)
Motor U1Motor U2Motor U3Motor U4
0.5N
273.3rad/s
0.906m
5% de la referencia
81.9rad/s
Figura 10.30. Simulación con perturbaciones en U2.
• Perturbaciones en la fuerza U3.
La fuerza U3 afecta directamente al eje ‘X’ y los límites de saturación son -0.57N el mínimo y 0.3N como máximo.
El comportamiento de los ejes ‘X’ e ‘Y’ y los límites de fuerza de empuje son iguales, por tanto la simulación del eje ‘X’ debería salir igual a la del eje ‘Y’, la única variación es que los motores afectados son U1 y U3.
Como se ve en la figura 10.31, el sistema es capaz de rechazar la perturbación aplicada en un tiempo de 1s, correspondiente al tiempo de establecimiento y crea una sobreoscilación del 9.4%, a diferencia del modelo reducido con un valor de ts = 0 y una Mp = 4.3%. El sistema no se vuelve inestable en ningún momento.

Modelo y Control LQR de una aeronave de cuatro rotores
JUAN Mª DÍAZ CANO. 151
0 5 10 151
1.05
1.1Posición X (m)
Eje "X"Referencia 1m
0 5 10 150
0.2
0.4
0.6
0.8Perturbación en U3 (N)
0 5 10 150
100
200
300Velocidad motores 1, 2, 3, 4 (rad/s)
Tiempo (s)
Motor U1Motor U2Motor U3Motor U4
273.3rad/s
0.5N
1.094m 5% de la referencia
81.9rad/s
Figura 10.31. Simulación con perturbaciones en U3.
• Perturbaciones en la fuerza U4.
La fuerza U4 afecta directamente al ángulo ‘Ψ’ y los limites de saturación son -0.11N el mínimo y 0.11N como máximo. Para realizar la simulación se aplicará una perturbación de 0.1N.
En la figura 10.32 se representa el ángulo ‘Ψ’ para estudiar su comportamiento cuando se le aplica una perturbación, el sistema es capaz de rechazar la perturbación aplicada en un tiempo de 2s, correspondiente al tiempo de establecimiento y crea una sobreoscilación del 1%, como en el modelo reducido. El sistema no se vuelve inestable en ningún momento.

Modelo y Control LQR de una aeronave de cuatro rotores
JUAN Mª DÍAZ CANO. 152
0 5 10 150.1
0.105
0.11
0.115
Ángulo Psi (rad)
Ángulo "Psi"Referencia 0.1rad
0 5 10 150
0.05
0.1Perturbación en U4 (N)
0 5 10 150
100
200
300Velocidad motores 1, 2, 3, 4 (rad/s)
Tiempo (s)
Motor U1Motor U2Motor U3Motor U4
271.1rad/s
0.1N
0.11rad
5% de la referencia
85.8rad/s
Figura 10.32. Simulación con perturbaciones en U4.
• Perturbaciones en la fuerza U1, U2, U3, U4.
Para terminar este apartado se realizará una simulación donde se aplique perturbaciones en todas las variables de empuje Ui y se aumentarán los escalones de referencias a todas las variables, ‘Xr’ e ‘Yr’ un escalón de 1m, a ‘Zr’ un escalón de 2m y el ángulo‘Ψr’ una referencia de 0.26rad; de esta forma se comprobará cómo se comporta el control LQR cuando se le exige el máximo. Las perturbaciones aplicadas a U1, U2, U3 y U4 serán respectivamente 2N, 0.25N, 0.25N y 0.02N.
En la figura 10.30 se representa las variables ‘X’, ‘Y’ y ‘Z’, los ángulos ‘θ’, ‘φ’ y‘Ψ’ y la velocidades angulares de los motores.
Al aplicarle las perturbaciones, todos los ejes sufren una sobreoscilación. Para el eje ‘Z’ es del 10%, para el eje ‘X’ es del 2% y del 8% en el eje ’Y’. Por último, en el eje ‘Ψ’ la sobreoscilación es del 1%. En cinco segundos el sistema tiene controlado las perturbaciones y las va suprimiendo.

Modelo y Control LQR de una aeronave de cuatro rotores
JUAN Mª DÍAZ CANO. 153
0 5 10 151
1.5
2
Posición X ,Y y Z (m)
Eje "X"Referencia X e YEje "Y"Eje "Z"Referencia Z
0 5 10 15-0.1
0
0.1
0.2
0.3Ángulo Theta, Phi y Psi (rad)
Ángulo ThetaÁngulo PhiÁngulo PsiReferencia Psi
0 5 10 150
1
2Perturbación en U1, U2, U3 y U4 (N)
Perturbación U1Perturbación U2, U3Perturbación U4
0 5 10 150
100
200
300Velocidad motores 1, 2, 3, 4 (rad/s)
Tiempo (s)
Motor U1Motor U2Motor U3Motor U4
2m2.1m
1.02m 0.92m
0.27rad
2N
0.25N 0.02N
0.26rad
Figura 10.33. Simulación con perturbaciones en U1, U2, U3, U4.
10.4 Conclusión.
Tras observar las distintas simulaciones en ambos modelos (completo y reducido), se llega a la conclusión que el modelo optimo para realizar posteriores estudios es el modelo completo, ya que al simplificar el modelo del Quad-Rotor quitando la dinámica de los motores el comportamiento de este sistema es muy diferente con respecto al modelo completo.
Una vez diseñado un controlador LQR sin efecto integral tiene un comportamiento más suave que el controlador que tiene efecto integral. Este control

Modelo y Control LQR de una aeronave de cuatro rotores
JUAN Mª DÍAZ CANO. 154
está preparado para realizar vuelos al aire libre, corrigiendo todas las posibles perturbaciones que pudiesen presentarse. En cambio, el controlador LQR sin efecto integral no es aconsejable su uso para vuelos al aire libre, por lo que su funcionamiento se limita a superficies cerradas.
El controlador LQR con efecto integral tiene un comportamiento mejor respecto al LQR efecto integral con mayor ponderación porque está diseñado para que no sobreoscilen los ejes al cambiar la referencia. Sin embargo, no es capaz de rechazar las perturbaciones tan rápido como el controlador LQR con mayor ponderación.
Este control, LQR efecto integral, se usará para eliminar los posibles desajustes del Quad-Rotor debido al paso del tiempo.

Modelo y Control LQR de una aeronave de cuatro rotores
JUAN Mª DÍAZ CANO. 155
11 Capítulo. Conclusión final.
El proyecto comenzó con varios objetivos que se han ido cumpliendo capítulo a capítulo y que posteriormente se comentará.
Como primer objetivo se impuso escoger un modelo matemático de un Quad-Rotor que incorporase el mayor número de efectos físicos para realizar posteriores estudios sobre él. Se optó por el modelo del artículo [1] añadiéndole las ecuaciones diferenciales del sistema propulsor.
A continuación, se modelaron las ecuaciones diferenciales que gobernaban al sistema propulsor, escogiendo los parámetros del motor de corriente continua de un fabricante porque las constantes del motor contrastados con el artículo [1] no correspondían en la realidad a ningún modelo. También se tuvieron que diseñar varios controladores para controlar el sistema propulsor, escogiendo como controlador un PI con Antiwind-Up puesto que era el más rápido en comparación con el PI.
Para gobernar al Quad-Rotor se estudiaron varias estructuras de control, entre ellas: LQR, LQR de ganancias tabuladas y LQR efecto integral. No se podría afirmar que uno de ellos es mejor que otro, puesto que cada uno tiene características que lo hacen fundamental en circunstancias determinadas de vuelo. El LQR es idóneo para trabajar en vuelo indoor, al no presentar sobreoscilación alguna en su comportamiento. En el LQR de ganancias tabuladas se consigue aumentar la zona de trabajo del sistema sin forzar la señal de control y además es óptimo para trabajar en condiciones desfavorables. En cuanto al LQR efecto integral, presenta dos variantes: LQR efecto integral y LQR efecto integral con mayor ponderación. El primero de ellos, el LQR efecto integral, es ideal para eliminar posibles desajustes del sistema debido al paso del tiempo, aunque no es óptimo para trabajar en ambientes donde puedan existir perturbaciones, porque su supresión es lenta. Sin embargo, el LQR efecto integral con mayor ponderación funciona correctamente en estos ambientes, pese a que su comportamiento es más agresivo al aparecer sobreoscilaciones.

Modelo y Control LQR de una aeronave de cuatro rotores
JUAN Mª DÍAZ CANO. 156
12 Capítulo. Futuras ampliaciones.
En este proyecto fin de carrera no se ha podido profundizar todo lo que se hubiese querido en las diferentes técnicas de control que se pueden aplicar, debido a que el estudio se alargaría demasiado.
Pero con este proyecto se asientan las bases para posteriores ampliaciones que se desee realizar, entre las cuales se destacaría:
• Estudio de estabilidad en controladores conmutados.
• Controlador conmutado LQR integral, con Antiwind-Up.
• LQR integral, con Antiwind-Up.
• Seguimiento de trayectorias.
• Linealización por realimentación.
• Control PID.
Se han realizado simulaciones con controladores conmutados, sin realizar un análisis de la estabilidad del Quad-Rotor para dichos controladores, ya que no es el objetivo de dicho proyecto. Este estudio sería conveniente antes de utilizar estos controladores para poder asegurar la estabilidad del sistema en las conmutaciones.
En el proyecto se estudia el comportamiento del control LQR con efecto integral, pero para tener un mejor comportamiento de dicho controlador se necesitaría aplicar alguna técnica Antiwind-Up para corregir la acumulación de error del término integral del controlador.
Se podría diseñar un controlador para seguimiento de trayectoria, ya que hasta ahora sólo se ha hecho para regulación.
Aparte de los controladores estudiados en este proyecto y los mencionados en este punto, se pueden diseñar controles de cálculo en línea, para así poder tener un control específico para cada punto de funcionamiento, pudiendo realizar estudios de robustez ante perturbaciones y el cálculo requerido para obtener el controlador.
Como se ha podido observar, este proyecto tiene varias ramas de investigación que pueden ser diseñadas en estudios posteriores.

Modelo y Control LQR de una aeronave de cuatro rotores
JUAN Mª DÍAZ CANO. 157
13 Anexo I.
En este apartado se hablará del programa “Control_Quad-Rotor”, el cual tiene implementado el modelo del Quad-Rotor en las dos versiones que se estudia en el proyecto, con acción integral o sin ella. Cada versión tiene implementada los dos modelos estudiados, tanto el modelo reducido como el modelo completo.
Control_Quad-Rotor: está diseñado para el entorno de Matlab/Simulink, empleando los bloques estándar de Simulink. El programa viene acompañado con unos archivos .m y .mdl. En los archivos .m se encuentran los cálculos para el diseño de los controladores LQR y en los .mdl está implementado el modelo del Quad-Rotor con bloques de Simulink.
En este apéndice se explicarán los archivos que integran el Control_Quad-Rotor y su funcionamiento para familiarizar al lector con el entorno, debido a que la utilización de esta herramienta acelera los procesos de cálculos para el diseño de controladores LQR.
13.1 Archivos del Control_Quad-Rotor.
El programa se presenta con un archivo de Matlab .m llamado Inicio_Control_Quad_Rotor, siendo éste el encargado de poner en funcionamiento el programa de cálculo del Quad-Rotor, además existen dos carpetas:
• sin_inte: modelo del Quad-Rotor sin efecto integral.
• con_inte: modelo del Quad-Rotor con efecto integral.
Ambas carpetas contienen los mismos archivos, por ello se comentarán los archivos de uno de ellos. La carpeta “sin_inte” contiene los siguientes archivos:
• sin_integral.m: contiene el menú principal.
• linealizar.m: linealiza el modelo de Simulink del Quad-Rotor.
• punto_de_equilibrio.m: calcula el punto de equilibrio del modelo “Quad-Rotor” según unas condiciones iniciales.
• arranque_caso2.m: contiene los cálculos previos para buscar el mejor controlador LQR.
• caso_despl_Z.m, caso_despl_X.m, caso_despl_Y.m, caso_despl_PSI.m: permite simular el modelo de Simulink del Quad-Rotor cambiando las ponderaciones del control LQR de cada eje.
• calculo_LQR.m: calcula un control LQR con los valores de ponderación recibidos.
• calcular_varios_LQR.m: se utiliza en el caso del controlador conmutado, para calcular los controladores LQR de cada zona de conmutación.

Modelo y Control LQR de una aeronave de cuatro rotores
JUAN Mª DÍAZ CANO. 158
• agrupa_los_LQR.m: agrupa todos los LQR obtenidos en el punto anterior en una matriz 3D.
• parametros_reducido_LC.m: contiene los parámetros y constantes del modelo reducido en Simulink.
• parametros_completo_LC.m: contiene los parámetros y constantes del modelo completo en Simulink.
• quadrotor_completo_LC_LQR.mdl: este archivo tiene implementado las ecuaciones no lineales del Quad-Rotor junto con las ecuaciones del motor DC en Simulink.
• quadrotor_reducido_LC_LQR.mdl: este archivo tiene implementado las ecuaciones no lineales del Quad-Rotor en Simulink.
13.2 Funcionamiento del Control_Quad-Rotor.
En este apartado se representará el diseño y las posibilidades que presenta esta herramienta a la hora de estudiar y diseñar controladores LQR.
Cuando se ejecuta Inicio_Control_Quad_Rotor, la imagen que aparece está en la figura 12.1, donde se puede seleccionar dos opciones: realizar un estudio utilizando un controlador con efecto integral (opción 1) o sin él (opción 2).
Figura 12.1. Ejecución del archivo Inicio_Control_Quad_Rotor.
La opción dos incluye más apartados que en la opción uno, pero los apartados que tienen el modelo con acción integral hacen la misma función que en el modelo sin acción integral, por ello se explicarán los apartados del modelo sin acción integral (opción 2). EL menú que aparece al seleccionar la opción 1 o 2 se muestra en la figura 12.2 y 12.3 respectivamente.

Modelo y Control LQR de una aeronave de cuatro rotores
JUAN Mª DÍAZ CANO. 159
Figura 12.2. Elección de la opción 1 en el menú.
Figura 12.3. Elección de la opción 2 en el menú.
13.2.1 Calcular punto de equilibrio y matrices A, B, C, D.
En esta primera opción existe la posibilidad de calcular el punto de equilibrio del sistema cuando se indica un punto de funcionamiento concreto y a partir de ese punto de funcionamiento, calcular las matrices de estados A, B, C, D.
Existen tres posibilidades. La primera sirve para introducir los valores concretos de ángulos, velocidades de los ángulos y señales de entrada de los motores, donde trabajará el Quad-Rotor. La segunda posibilidad busca un punto de equilibrio del sistema utilizando como valores de funcionamiento los mencionados anteriormente. La última opción, una vez calculado el punto de equilibrio, sería calcular las ecuaciones de estado para ese punto de funcionamiento.

Modelo y Control LQR de una aeronave de cuatro rotores
JUAN Mª DÍAZ CANO. 160
Figura 12.4. Cálculo del punto de equilibrio y matrices A, B, C, D.
13.2.2 Calcular LQR en el punto de equilibrio.
Al seleccionar la opción dos del menú principal, aparece la imagen de la figura 12.5, donde existe la posibilidad de calcular el controlador LQR (opción 2) en función de los valores de ponderación de las matrices Q y R que se les indique a través de la opción primera del menú.
Figura 12.5. Cálculo del LQR.
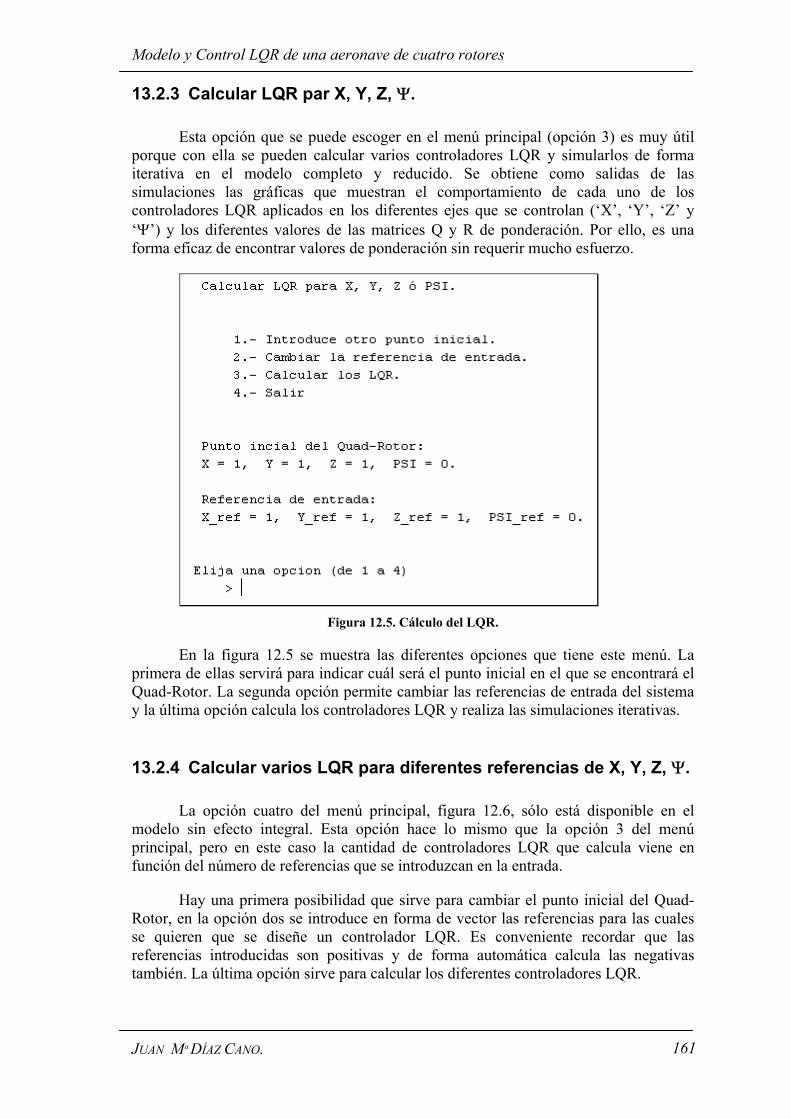
Modelo y Control LQR de una aeronave de cuatro rotores
JUAN Mª DÍAZ CANO. 161
13.2.3 Calcular LQR par X, Y, Z, Ψ.
Esta opción que se puede escoger en el menú principal (opción 3) es muy útil porque con ella se pueden calcular varios controladores LQR y simularlos de forma iterativa en el modelo completo y reducido. Se obtiene como salidas de las simulaciones las gráficas que muestran el comportamiento de cada uno de los controladores LQR aplicados en los diferentes ejes que se controlan (‘X’, ‘Y’, ‘Z’ y ‘Ψ’) y los diferentes valores de las matrices Q y R de ponderación. Por ello, es una forma eficaz de encontrar valores de ponderación sin requerir mucho esfuerzo.
Figura 12.5. Cálculo del LQR.
En la figura 12.5 se muestra las diferentes opciones que tiene este menú. La primera de ellas servirá para indicar cuál será el punto inicial en el que se encontrará el Quad-Rotor. La segunda opción permite cambiar las referencias de entrada del sistema y la última opción calcula los controladores LQR y realiza las simulaciones iterativas.
13.2.4 Calcular varios LQR para diferentes referencias de X, Y, Z, Ψ.
La opción cuatro del menú principal, figura 12.6, sólo está disponible en el modelo sin efecto integral. Esta opción hace lo mismo que la opción 3 del menú principal, pero en este caso la cantidad de controladores LQR que calcula viene en función del número de referencias que se introduzcan en la entrada.
Hay una primera posibilidad que sirve para cambiar el punto inicial del Quad-Rotor, en la opción dos se introduce en forma de vector las referencias para las cuales se quieren que se diseñe un controlador LQR. Es conveniente recordar que las referencias introducidas son positivas y de forma automática calcula las negativas también. La última opción sirve para calcular los diferentes controladores LQR.

Modelo y Control LQR de una aeronave de cuatro rotores
JUAN Mª DÍAZ CANO. 162
Figura 12.6. Cálculo de varios LQR.
13.2.5 Simulación modelo Quad-Rotor reducido.
A la quinta opción del menú principal de la figura 12.7, sólo se podrá acceder cuando se haya calculado un controlador en la opción 2 o 3 del menú principal. Cuando se haya calculado dicho controlador LQR, nos serviremos de esta opción para simular el controlador LQR diseñado en el paso anterior en el modelo reducido. Este menú únicamente tiene dos opciones: una en la que se introduce el punto inicial del sistema y la segunda opción para arrancar el modelo de Simulink, donde se encuentran implementadas las ecuaciones del Quad-Rotor.
Figura 12.7. Simulación del modelo reducido.

Modelo y Control LQR de una aeronave de cuatro rotores
JUAN Mª DÍAZ CANO. 163
13.2.6 Simulación modelo Quad-Rotor completo.
En la figura 12.8, se muestra la última opción que se utilizará, que al igual que en el punto anterior, sólo se podrá entrar una vez se haya calculado un controlador LQR en el punto 2 o 3 del menú principal. Consta de dos opciones: la primera sirve para introducir el punto inicial en el que se encuentra el sistema y la segunda sirve para arrancar el modelo de Simulink donde está el modelo del Quad-Rotor completo que incluye las ecuaciones de los motores DC.
Figura 12.8. Simulación del modelo reducido.

Modelo y Control LQR de una aeronave de cuatro rotores
JUAN Mª DÍAZ CANO. 164
14 Anexo II.
En este anexo se realizarán las aclaraciones de las definiciones utilizadas en este proyecto, como es el caso de:
• Tiempo de subida (tr): tiempo que tarda la respuesta en alcanzar el 90% de su valor final.
• Tiempo de pico (tp): tiempo que tarda la respuesta en alcanzar el primer máximo.
• Sobreoscilación (Mp): tanto por ciento de rebasamiento del valor de la referencia aplicada.
El cálculo de Mp se obtiene de la siguiente fórmula, permitiéndose como máximo una sobreoscilación del 10% en los controladores diseñados:
;)(
)()(∞
∞−=
yyty
M pp
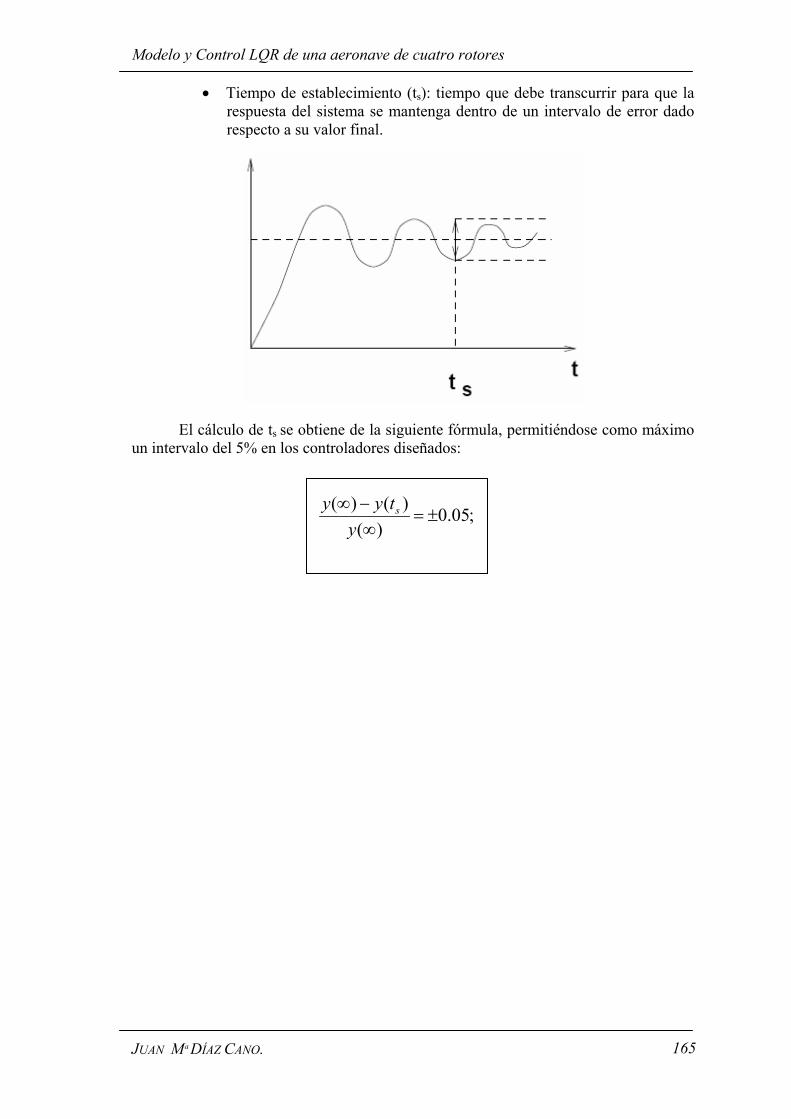
Modelo y Control LQR de una aeronave de cuatro rotores
JUAN Mª DÍAZ CANO. 165
• Tiempo de establecimiento (ts): tiempo que debe transcurrir para que la respuesta del sistema se mantenga dentro de un intervalo de error dado respecto a su valor final.
El cálculo de ts se obtiene de la siguiente fórmula, permitiéndose como máximo un intervalo del 5% en los controladores diseñados:
;05.0)(
)()(±=
∞−∞
ytyy s

Modelo y Control LQR de una aeronave de cuatro rotores
JUAN Mª DÍAZ CANO. 166
15 Referencias.
[1] Samir Bouabdallah, Pierpaolo Murrieri and Rolan Siegwart, “Towards Autonomous Indor Micro VTOL” Springer Autonomous Robots 18, pag 171-183 2005.
[2] Samir Bouabdallah and Rolan Siegwart, “Towards Intelligent Miniature Flying Robots”.
[3] Abdelhamid Tayebi and Stephen McGilvray, “Attitude Stabilization of a VTOL Quadrotor Aircraft,” in Proc. IEEE transactions on control systems technology, vol. 14, no. 3, may 2006.
[4] M.S. Kang, S. Park, H.G. Lee, D.H. Won and T.J. Kim, “Development of a hovering Robot System for Calamity Observation”, ICCAS 2005.
[5] Pedro Castillo, Alejandro Dzul and Rogelio Lozano, “Real-Time Stabilization and Tracking of a Four-Rotor Mini Rotorcraft”, IEEE transactions on control systems technology, vol. 12, no. 4, July 2004.
[6] Portescap, fabricantes de motores DC (www.portescap.com).
[7] P. McKerrow, “Modelling the draganflyer ftour-rotor helicopter”, University of Wollongong 2004.
[8] Antonio Flores, “Modelamiento y Linealización de Sistemas No Lineales usando SIMULINK”, Universidad iberoamericana.
[9] Antonio Flores, “Linealización de funciones lineales”, Universidad iberoamericana.
[10] María Marta Seron, “Sistemas no lineales”, Universidad Nacional de Rosario.
[11] Juan Padilla González, Ismael Alcalá Torrego, “Control optimo adaptativo aplicado a modelo de aeronave en Delta-Canard”, Universidad de Sevilla.
[12] www.eie.fceia.unr.edu.ar/~marimar/liscar/inicio.htm.
[13] Manual del sistema SureStep.
[14] http://asl.epfl.ch/research/projects/VtolIndoorFlying/indoorFlying.php
[15] P. Castillo, P. García, R. Lozano, P. Albertos, “Modelado y estabilización de un helicoptero con cuatro rotores” RIAI Nº1, pag 41-57, 2007.
[16] Gorge McWilliams, “Desingn and implementation of multiple autonomous micro-helicopters for an indoor cooperative control testbed” The Ohio state University.