universidad autÓnoma metropolitana- iztapalapa148.206.53.84/tesiuami/uami11614.pdf · proyección...
TRANSCRIPT

UNIVERSIDAD AUTÓNOMAMETROPOLITANA- IZTAPALAPA
DIVISIÓN: CIENCIAS BASICAS E INGENIERIA
GRADO: LICENCIATURA
INGENIERIA EN ELECTRONICA
NOMBRES:TINAJERO SANCHEZ ERIKA GUILLERMINA
VILLEGAS RICO MIGUEL ANGEL
TITULO: DESARROLLO DE SUPERFICIESAERODINAMICAS PARA AVIONES DE
AEROMODELISMO. SISTEMAS DE NAVEGACION YPLAN DE VUELO
ASESORES:ALEJANDRO MARTINEZ GONZALEZ
LAURA E. ORTIZ BALBUENA
ENERO-JULIO DEL 2004

TITULO DEL PROYECTO
“Desarrollo de Sistemas de Control de las Superficies Aerodinámicas paraAviones de Aeromodelismo.”
Antecedentes
En la actualidad, la aerodinámica y el diseño de aviones tanto comerciales comomilitares, han tenido un desarrollo impresionante en los últimos años. Con ellos, ahoraes posible volar aviones comerciales como el Boing 747 donde el piloto realizafunciones mínimas gracias a los sofisticados sistemas de control.
Evidentemente, estos desarrollos requieren de inversiones multimillonarias y degrupos de trabajo alta mente capacitados, “masa crítica”. sin embargo es importantedesarrollar líneas de investigación de manera muy modesta para generar conocimientoy experiencia en estas áreas.
Justificación
Una alternativa para este propósito es trabajar con aviones de modelismo dados,de costos mucho más accesibles y básicamente la dinámica de vuelo de estos avioneses muy similar a los aviones de vuelo subsónico y existen grandes posibilidades degenerar nichos de investigación en aviones de reconocimiento de bajo costo.
Innovación
Actualmente los aviones de aeromodelismo se manipulan por medio de un controlremoto y se utilizan para la adquisición de datos. Los propósitos de nuestro proyecto,son lograr un vuelo autónomo del avión en condiciones ideales.
Para lograr esto, el proyecto implica el diseño de sistemas que controlen losservomotores del avión a partir de un plan de vuelo previamente diseñado (auxiliadopor un GPS). La finalidad es que el avión mantenga un vuelo horizontal y con velocidadconstante guiado por el plan de vuelo indicando el destino que debe alcanzar (lacuestión de aterrizaje y despeje se realizara por medio del control remoto).

1
Objetivos
• Comprender los mecanismos de control que gobiernan los movimientos delas superficies de control de un avión de aeromodelismo.
• Elaborar modelos de simulación basados en la dinámica y característicaspropias de los motores “actuadores” y las superficies propias del avión,para el control de los movimientos de alabeo, cabeceo y rumbo.
• Desarrollo de sistemas electrónicos de control basados enmicroprocesadores para motores de los aviones de modalismo
Metodología Utilizada
Para abordar el proyecto, se identificaron tres bloques de trabajo:• Dinámica de vuelo y superficies de control (instrumentos del avión, pruebas de
vuelo, elección del avión, etc.)• Ecuaciones longitudinales y laterales de movimiento de la aeronave• Plan de vuelo y sistemas de navegación
Calendarizacion del Proyecto
2004 ACTIVIDAD Enero Febrero Marzo Abril Mayo Junio JulioNavegación y los sistemas denavegación (INS, GPS) *Como funciona el GPS*Eleccion del GPSPlan de vuelo*Conocimiento y uso de radiosDesarrollo del sistema de vuelo.GPS(Acoplamiento y pruebas dedispositivos)Teoría de Control (Pruebas en tierra)Pruebas con radios.Teoría de control (pruebas de vuelo)Comunicación GPS-RADIOS-PC
(*)Investigación

2
INDICE Pag.Superficie de la tierra y cartografía +++++++++++++++++++++++++++++++++++++++ 3 Forma de la tierra………………………………………………………………………. 4 Los círculos sobre la esfera…………………………………………………………….4 Latitud y longitud…………………………………………………………………………5 Hora...……………………………………………………………………………………..6 Proyecciones cartográficas……………………………………………………………..7 Proyección Mercator Proyección cilíndrica equidistante Proyección Polar estereográfica Proyección Lambert de Azimut y área constante Proyección de Azimut equidistante Proyección Ortográfica.Navegación Aérea ++++++++++++++++++++++++++++++++++++++++++++++++++10 Términos importantes para la navegación………………………………………….11 Navegación a la estima……………………………………………………………….12 Sistema de navegación autosuficiente………………………………………………12 Sistema de navegación inercial (INS). ………………………………………12 Sistema de Posicionamiento Global (GPS). ………………………………..13 Tipos de GPS………………....………………………………………...17 Elección del Sistema de Posicionamiento Global…………………..19 Comunicación entre GPS y PC………………………………………19
Pruebas con el GPS……………………………………………………25 Radios……………………………………………………………………………32Plan de vuelo ++++++++++++++++++++++++++++++++++++++++++++++++++++++38 Planteamiento del vuelo……………………………………………………………….39 Trazado de la ruta……………………………………………………………………...40 Determinación del rumbo magnético…………………………………………………40 Como realizar un plan de vuelo……………………………………………………….41 Coordenadas UTM……………………………………………………………41 Origen Coordenadas Precisión Coordenadas Geográficas…………………………………………………….43 Determinación de un punto por coordenadas geográficas…………...47 Determinación de una constante Punto buscado Formula de conversión Determinar las coordenadas geográficas de un punto………………..50 Formula de conversión Estrategia de vuelo……………………………………………………………..56
Acciones a seguir para determinar en donde nos encontramos…….….58Ejemplo de los algoritmos de la computadora del plan de vuelo…………76Anexo 1………………………………………………………………………….88Anexo 2………………………………………………………………………...106Anexo 3……………………………………………………………………..…108

3

4
POLONORTE
POLOSUR
ECUADOR
90°
90
LATITUD
PARALELOSDE LATITUD
MERIDIANO DELONGITUD
90°
GRENWICH
180°ESTE
180°OESTE
EJE DEGIRO
SUPERFICIE DE LA TIERRA Y CARTOGRAFÍA
Para poder llevar a cabo los objetivos que comprende este proyecto, primeramentedebemos saber algunos términos básicos sobre la superficie terrestre que nos serán degran utilidad posteriormente.
El instrumento principal de la navegación es una carta de superficie terrestre, sedenomina carta a un mapa especialmente ideado para la navegación.
Forma de la tierraLa tierra en realidad no es una esfera, de hecho se parece mas a un elipsoide derevolución, los cartógrafos que deben estudiar su forma con mas exactitud, ladenominan geoide, la fuerza centrifuga debida a la rotación ha hecho que la tierra seensanche por el ecuador y se achate por los polos, sin embargo este hecho esdespreciable al efecto de la navegación normal y se considera a la tierra como unaesfera perfecta.
Los círculos sobre la esferaSi se corta la superficie de una esfera mediante un plano, el resultado es unacircunferencia. Si el plano pasa por el centro de la esfera la circunferencia se denominacírculo máximo y es la mayor circunferencia que se puede dibujar sobre la superficiede esta esfera. Las circunferencias formadas por planos que no pasan por el centro dela esfera se llaman círculos menores los segmentos de estas circunferencias o círculosse denominan arcos y se miden en grados minutos y segundos.
Si se divide la circunferencia en 360 partes iguales, cada uno de estos arcos tendrá ungrado de longitud, si se divide un aro de un grado en 60 aros iguales, cada uno deellos tiene un minuto de longitud, el minuto se divide en 60 segundos, cuando seefectúan mediciones muy exactas se emplean décimas de segundo.
Longitudes, latitudes y paralelos de la tierra.

5
Latitud y longitudLa determinación de la posición sobre la esfera requiere un punto de referencia, enocasiones para situar un avión puede ser suficiente con decir sencillamente que esta a12000 pies de altura sobre algún punto.Generalmente esto no es suficiente y a veces cuando esta sobre el agua es imposible,por tal motivo sobre la superficie de la tierra se ha establecido un sistema universal dereferencia posicional, trazando líneas de altitud y longitud.
Sobre cualquier esfera, los círculos son las mejores líneas de referencia, el únicoproblema es por donde trazar los círculos, como la tierra es una esfera achatada quegira sobre si misma, el eje de giro que pasa por los puntos de mayor achatamiento,constituye el punto de partida mas lógico, los extremos de ese eje se llaman polo nortey polo sur, a mitad del camino de encuentro de los dos se encuentra el circulo máximodenominado ecuador.
La latitud varia desde 0 en el ecuador hasta 90 grados norte o sur en los polos, todaslas líneas de longitud, con excepción del ecuador son círculos menores paralelos a el yse denominan paralelos de latitud.
La mitad de cada circulo máximo que pasa por los polos es un meridiano, todos losmeridianos se cortan en ángulo recto con los paralelos de latitud, para que se puedanemplear como líneas de referencia, es preciso escoger un meridiano especifico comopunto de partida, el meridiano origen mas común empleado en todo el mundo es elmeridiano de grenwich, cercad de Londres en Inglaterra.Las direcciones se miden en este meridiano tanto en dirección este como en direcciónoeste de 0 a 180 grados.
Entonces cualquier punto desde la superficie de la tierra se puede determinar por laintersección de su paralelo de latitud así como su meridiano de longitud. Ver figura 1.
Figura 1

6
HORAEl hecho de que la tierra sea redonda y gire sobre su eje constituye la base de nuestrosistema de medida del tiempo, la tierra realiza una rotación completa en 24 hrs., por lotanto podemos dividir el ecuador en 24 partes o en 360 grados, por lo tanto cada horaequivale a 15 grados de longitud.
El día es el tiempo necesario para que la tierra gire 360 grados sobre su eje, sedenomina mediodía al momento en que el sol esta en la vertical de un meridiano, asímismo la tierra se divide en 24 husos horarios de 15 grados de longitud que tienen unadiferencia de una hora entre si.
En el momento de notificar la hora estimada de llegada y otras referencias de tiempo elcontrol del trafico aéreo, puede tener grandes conflictos si quisiera dar la hora exacta encada región de la tierra, motivo por lo cual se definió la adopción de la hora z para lasoperaciones aéreas, la hora z es la hora correspondiente al huso horario que tienecomo meridiano central el que pasa por Grenwich, también se denomina hora GMT.Por ejemplo las 10:15 de la mañana en Nueva York serán las 3:15 de la tarde enGrenwich por lo tanto en la hora z se emplean 4 dígitos y el reloj de 24 horas para notener confusiones en el día y la noche, por lo tanto la hora será 15:15Z
PLANISFERIO DE HUSOS Y HORARIOS

7
Proyecciones cartográficas
A la mayoría de cartas y mapas terrestres se les llama proyecciones cartográficas, porcomodidad la cartografía usa mapas planos a esta deformación de la carta plana se ledenomina distorsión. Al conjunto de meridianos y paralelos de las cartas se denominancanevas, la configuración del canevas es lo que determina las características generalesy el aspecto del mapa.
Distancia y dirección en la esferaEn la superficie de una esfera la distancia más corta entre dos puntos es el aro delcírculo máximo. La distancia sobre un arco del circulo máximo se mide en gradosminutos y segundos, a efectos prácticos estas distancias se trasforman en millasnáuticas o terrestres.
En una esfera la dirección se mide siempre en grados en sentido del reloj, tomandocomo origen la dirección del polo norte geográfico.
Los términos cartográficos más comunes son:Escala de la carta.- es la relación entre una distancia en el mapa y la distanciaverdadera allí representada.
Ortodrómica.- es la línea de mínima distancia que une dos puntos de la superficie de latierra y que corresponde al arco del círculo máximo que pasa por esos dos puntos.
Loxodrómica.- es la línea que une dos puntos cruzando todos los meridianos con elmismo ángulo, es la línea que sigue un avión cuando mantiene constante el rumbogeográfico.
Proyección Mercator
Esta proyección es probablemente la másfamosa de todas la proyecciones, y toma elnombre de su creador, que lo creó en 1569.Es una proyección cilíndrica que carece dedistorsiones en la zona del Ecuador. Una delas características de esta proyección es quela representación de una línea con un azimut(dirección) constante se dibuja completamenterecta. Esta línea se llama línea de rumbo o
loxódromo. De esta forma, para navegar de un sitio a otro, sólo hay que conectar lospuntos de salida y destino con una línea recta, lo que permite mantener el cursoconstante durante todo el viaje. Esta Proyección se usa extensivamente pararepresentar los mapas mundiales, pero las distorsiones que crea en las regionespolares son bastantes grandes, dando la falsa impresión de que Groenlandia y laantigua Unión Soviética son más grandes que África y Sudamérica.

8
Proyección Cilindrica Equidistante
Esta proyección cilíndrica es realmente un escalado linear de longitudes y latitudes, Estambién conocida como la Proyección dePlate Carée. Es característico observarque todas las líneas de los meridianos yparalelos son líneas rectas, y que todaslas áreas representadas corresponden aperfectos cuadrados. Observe que lasáreas en la proyección Mercator cerca delos polos son más grandes.
Proyección Polar Estereográfica
Este tipo de proyección se basa en las proyecciones que realizaban los griegos. Su usoprincipal es representar las regiones polares. Es característico ver que todos losmeridianos son líneas rectas, con un azimut constante, mientras que los paralelosconstituyen los arcos de un círculo.
Proyección Lambert de Azimut y área constante
Esta proyección fue creada por Lambert en 1772, y se usa típicamente para representargrandes regiones del tamaño de continentes y hemisferios. Carece de perspectiva. Lasáreas representadas coinciden con las reales. La distorsión es cero en el centro de laproyección para cada plano que se represente, pero esta distorsión aumentaredialmente conforme se aleja del centro.

9
Proyección de Azimut Equidistante
Lo más notorio de esta proyección es las distancias medidas desde el centro del mapason todas verdaderas. Por tanto, un círculo que dibuje representa el conjunto de puntosque están equidistantes del origen de dicho círculo. Además, las direcciones señaladasdesde el centro son también todas verdaderas. Este tipo de representación ha sidocreada desde hace varios siglos. Es útil para hacerse una idea global de todas laslocalizaciones que están equidistantes de un punto determinado.
Proyección Ortográfica
Esta proyección presenta una perspectiva tomada desde una distancia infinita. Se usaprincipalmente para presentar la apariencia que el globo terráqueo tiene desde elespacio. Como la proyección de Lambert's y la estereográfica, sólo un hemisferio sepuede ver a un tiempo determinado. Esta proyección no es ni conformal ni posee áreasreales, e introduce muchísima distorsión cerca de los bordes del hemisferio. Lasdirecciones desde el centro de la proyección son, sin embargo, verdaderas. Estaproyección fue usada por los egipcios y los griegos hace más de 2000 años.

10

11
LA NAVEGACIÓN AÉREA
Navegación, ciencia que determina la posición de un barco, avión o misil teledirigido, yque traza una dirección para llevar de forma segura y sin obstáculos el aparato desdeun punto a otro.
La ciencia de la navegación se divide en cuatro técnicas principales: 1) la navegación ala estima, que se deriva de la expresión deduced reckoning, y estima la posiciónaproximada de un navío solamente desde su rumbo y velocidad; 2) guiado, que implicatripular la embarcación mediante referencias frecuentes a señales geográficas y ayudasde navegación y por el uso de sondas; 3) navegación astronómica, que emplea laobservación de los cuerpos celestes para determinar la posición sobre la superficieterrestre; y 4) navegación electrónica, el sistema más importante y avanzado denavegación en la actualidad, que usa radio y equipo electrónico.
Pero dado que cada uno de estas técnicas de navegación son utilizadas dependiendoel tamaño del avión, para nuestro proyecto solo utilizaremos las referencias de unsistema de navegación inercial, y el uso del sistema de posicionamiento global (GPS).
La velocidad el tiempo, la distancia y la dirección del viento son factores fundamentalesque actualmente están hábilmente conjugados, con sistemas electrónicos y porsupuesto la habilidad del navegante.
Términos empleados en la situación del avión
Marcación: la dirección en la que se encuentra un objeto respecto al avión se denominamarcación. Las marcaciones son medidas angulares y se suelen medir en el sentido delas manecillas del reloj, desde 0° hasta 360°.
La marcación geográfica se mide tomando como referencia la dirección del nortegeográfico. La marcación magnética se mide tomando como referencia el norte magnético; lamarcación relativa emplea como referencia el rumbo del avión.
Para tener utilidad en el cálculo de la posición del avión, hay que convertir la marcaciónrelativa en marcación geográfica, sumando el rumbo del avión a la marcación relativa.
Rumbo + marcación relativa = marcación geográfica
Línea de posición: Se le llama línea de posición a la línea que une todos los puntos enlos que puede estar un avión en un momento dado.
Posición: Una posición es una situación geográfica determinada por referenciasvisuales a la superficie. Es un punto no una línea.Puntos intermedios. El punto intermedio de referencia es una posición geográficapredeterminada empleada para la definición de una ruta o para informar de la posicióndel avión.

12
Navegación a la estima.Se denomina navegación a la estima el método de precisar la posición mediante ladirección y la distancia desde otra posición anterior conocida, la precisión de este tipode navegación depende de lo mucho que se aproxime el viento empleado en loscálculos al viento real que va a encontrar el avión y con que precisión mantenga elpiloto el rumbo de la brújula calculado.
La navegación a la estima comprende:1.- trazar y medir la ruta2.- observar los instrumentos de vuelo para determinar la velocidad rumbo y altitud delavión.3.- planeamiento del vuelo teniendo en cuenta los vientos previstos.4.- calcular los vientos que se van presentando a lo largo de la ruta.
SISTEMA DE NAVEGACIÓN AUTOSUFICIENTE.Un sistema de navegación autosuficiente es independiente de las informacionesexteriores, para determinar la posición. Por tanto, se puede emplear en condicionesmeteorológicas desfavorables, porque no se ve afectado por las tormentas, lapropagación, los estáticos o las perturbaciones de la ionosfera.
Sistema De Navegación Inercial.Un sistema de navegación inercial consiste esencialmente en una plataforma estable,compuesta de acelerómetros y giroscopios suspendidos en un montaje. Los giroscoposmantienen a los acelerómetros en una posición nivelada, en relación con la superficiede la Tierra, para que puedan medir con precisión las aceleraciones del avión, que seconvierten en velocidades.
Un acelerómetro es un instrumento que siente y mide los cambios de movimiento oaceleraciones del móvil que lo lleva instalado. La aceleración es el régimen de cambiode velocidades por unidad de tiempo. El acelerómetro es el instrumento básico demedida del sistema inercial.
Básicamente consiste en un dispositivo pendular que tiende a abandonar la posición dereposo cuando el avión acelera. El acelerómetro tiene también un dispositivo detectorque informa del valor del desplazamiento del péndulo respecto a la posición de reposo.
La plataforma. Los acelerómetros están montados sobre una suspensión universal,corrientemente llamada plataforma inercial. La plataforma es un dispositivo mecánicoque permite que el avión experimente todo tipo de cambios en actitud mientras que elelemento interior de la plataforma, donde están montados los acelerómetros, semantiene nivelado gracias a los giroscopos.
Un giróscopo es un dispositivo que proporciona una plataforma estable. Se le puededefinir como una masa rotante, habitualmente una rueda o un disco, que gira alrededorde un eje. El giroscopio esta suspendido por un sistema que permite que la rueda girealrededor de uno o dos ejes perpendiculares el uno al otro y al eje de rotación delgiróscopo, cuando actúa sobre el una fuerza exterior o par de fuerzas.

13
Los giróscopos son necesarios en los sistemas inerciales para controlar la nivelación yorientación del elemento constituido por la plataforma estable. Estos giróscopos tienenun diseño de precisión, así como su fabricación y funcionamiento: al igual que losacelerómetros, están instalados en un montaje común. Cuando este montaje tiende ainclinarse separándose de la posición de nivelación, los ejes de rotación de losgiróscopos permanecen fijos. La carcasa de los giróscopos se desnivela y la magnitudde esta desvinculación es detectada por el dispositivo productor de señales delgiróscopo. Entonces se amplifica la señala y se envía a un motor que acciona elconjunto de la suspensión y vuelve a dejar el conjunto nivelado. De este modo, elacelerómetro se mantiene nivelado y el péndulo no detecta las aceleraciones de lagravedad, sino únicamente las aceleraciones horizontales del avión, según se desplazapor la superficie de la tierra. La plataforma se puede desnivelar respecto a los tres ejesde cabeceo, ladeo y guiñada; de un modo casi instantáneo los giróscopos detectan losmovimientos de la plataforma, evitando que esta se desnivele, con lo cual se mantienelos acelerómetros nivelados.
GPS (Sistema de posicionamiento global)
Sistema de Posicionamiento Global, conocido también como GPS, es un sistema denavegación basado en 24 satélites, que proporcionan posiciones en tres dimensiones,velocidad y tiempo, las 24 horas del día, en cualquier parte del mundo y en todas lascondiciones climáticas. Al no haber comunicación directa entre el usuario y los satélites,el GPS puede dar servicio a un número ilimitado de usuarios.
Historia y Desarrollo
Dirigido por el Departamento de Defensa de Estados Unidos, el Sistema dePosicionamiento Global Navstar se creó en 1973 para reducir los crecientes problemasen la navegación. Al ser un sistema que supera las limitaciones de la mayoría de lossistemas de navegación existentes, el GPS consiguió gran aceptación entre la mayoríade los usuarios. Desde los primeros satélites, se ha probado con éxito en lasaplicaciones de navegación habituales. Como puede accederse a sus funciones deforma asequible con equipos pequeños y baratos, el GPS ha fomentado muchasaplicaciones nuevas.
Caracteristicas
El Sistema de Posicionamiento Global (GPS) está disponible en dos formas básicas:SPS, iniciales de Standard Positioning Service (Servicio de Posicionamiento Estándar),y PPS, siglas de Precise Positioning Service (Servicio de Posicionamiento Preciso). ElSPS proporciona la posición absoluta de los puntos con una precisión de 100 m. Elcódigo PPS permite obtener precisiones superiores a los 20 m; este código es accesiblesólo a los militares de Estados Unidos y sus aliados, salvo en situaciones especiales.

14
Las técnicas de mejora, como el GPS diferencial (DGPS), permiten a los usuariosalcanzar hasta 3 m de precisión. Los investigadores fueron los primeros en usarportadoras para calcular posiciones con una precisión de 1 cm. Todos los usuariostienen a su disponibilidad SPS, DGPS y técnicas portadoras.
Funcionamiento del sistema de posicionamiento global
Los satélites GPS llevan relojes atómicos de alto grado de precisión. La informaciónhoraria se sitúa en los códigos de transmisión mediante los satélites, de forma que unreceptor puede determinar en cada momento en cuánto tiempo se transmite la señal.Esta señal contiene datos que el receptor utiliza para calcular la ubicación de lossatélites y realizar los ajustes necesarios para precisar las posiciones. El receptor utilizala diferencia de tiempo entre el momento de la recepción de la señal y el tiempo detransmisión para calcular la distancia al satélite. El receptor tiene en cuenta los retrasosen la propagación de la señal debidos a la ionosfera y a la troposfera. Con tresdistancias a tres satélites y conociendo la ubicación del satélite desde donde se envió laseñal, el receptor calcula su posición en tres dimensiones.
Sin embargo, para calcular directamente las distancias, el usuario debe tener un relojatómico sincronizado con el Sistema de Posicionamiento Global. Midiendo desde unsatélite adicional se evita que el receptor necesite un reloj atómico. El receptor utilizacuatro satélites para calcular la latitud, la longitud, la altitud y el tiempo.
Los satélites del Sistema de Posicionamiento Global (GPS) describen órbitas a gran altura sobre la Tierra enubicaciones precisas. Permiten que el usuario de un receptor de GPS determine de forma exacta su latitud, longitud yaltitud. El receptor mide el tiempo que tardan en llegar las señales enviadas desde los diferentes satélites (A, B y C).A partir de esos datos, el receptor triangula la posición exacta. En todo momento, cada punto de la Tierra recibecobertura de varios satélites. Se necesitan tres satélites para determinar la latitud y la longitud, mientras que uncuarto satélite (D) es necesario para determinar la altitud.

15
Partes del sistema de posicionamiento global
El Sistema de Posicionamiento Global consta de tres divisiones: espacio, control yusuario. La división espacio incluye los satélites y los cohetes Delta que lanzan lossatélites desde Cabo Cañaveral, en Florida, Estados Unidos. Los satélites GPS sedesplazan en órbitas circulares a 17.440 km de altitud, invirtiendo 12 horas en cada unade las órbitas. Éstas tienen una inclinación de 55° para asegurar la cobertura de lasregiones polares. La energía la proporcionan células solares, por lo que los satélites seorientan continuamente dirigiendo los paneles solares hacia el Sol y las antenas haciala Tierra. Cada satélite cuenta con cuatro relojes atómicos.
SEGMENTO ESPACIAL
El Segmento Espacial está constituido por los satélites que soportan el sistema y lasseñales de radio que emiten. Estos satélites conforman la llamada constelaciónNAVSTAR (Navigation Satellite Timing and Ranging), constituida por 24 satélitesoperativos más cuatro de reserva, mantenidos por la fuerza aérea estadounidense.
Los 24 satélites y sus 4 de reserva de la constelación NAVSTAR, circundan la tierra enórbitas a una altura alrededor de los 17 440 Km. de la superficie (puede ser algo más oalgo menos, dependiendo del satélite) y distribuidos de tal manera que en cada puntode la superficie terrestre se tiene posibilidad de leer la señal de al menos cuatrosatélites.
Constelación NAVSTAR
La división control incluye la estación de control principal en la base de las FuerzasAéreas Falcon, en Colorado Springs, Estados Unidos, y las estaciones de observaciónsituadas en Falcon AFB, Hawai, en la isla de Ascensión en el Atlántico, en Diego Garcíaen el océano Índico, y en la isla Kwajalein en el Pacífico sur. Las divisiones de controlutilizan las medidas recogidas en las estaciones de observación para predecir elcomportamiento de las órbitas y relojes de cada satélite. Los datos de predicción seconectan a los satélites para transmitirlos a los usuarios. La división control también seasegura de que las órbitas de los satélites GPS permanezcan entre los límites y de quelos relojes no se alejen demasiado del comportamiento nominal.

16
Segmento de control
Esta se encarga de calcular las efemérides de cada uno de los satélites.Hay 3 estaciones de carga situadas Isla Ascensión, Diego García, KwajaleinAdemás hay 2 estaciones monitorasSe encuentran en Colorado Spring y Hawai.Controlan el estado y posición de los satélites.
Segmento de control
La división usuario es un término en principio asociado a los receptores militares. LosGPS militares utilizan equipos integrados en armas de fuego, armamento pesado,artillería, helicópteros, buques, submarinos, carros de combate, vehículos de usomúltiple y los equipos individuales para soldados. Además de las actividades básicas denavegación, su aplicación en el campo militar incluye designaciones de destino, apoyoaéreo, municiones ‘terminales’ y puntos de reunión de tropas. La lanzadera espacialestá dotada de un Sistema de Posicionamiento Global.
SEGMENTO DEL USUARIO
Está formado por los receptores GPS.Sus funciones principales son las siguientes:
- Sintonizar las señales emitidas por los satélites- Decodificar el mensaje de navegación- Medir el retardo de la señal (desde el transmisor hasta el receptor) a partir de loscuales calculan la posición.- Presentar la información de la posición en la que se encuentra (en 3D ó en 2D)
Con más de medio millón de receptores de GPS, los usuarios civiles tienen una divisiónpropia, grande y diversa. Incluso antes de que todos los componentes de los satélitesestuvieran en órbita, los investigadores utilizaban el Sistema de Posicionamiento Globalpara adelantar días o semanas los métodos oficiales de investigación. El GPS se usa

17
hoy en aeroplanos y barcos para dirigir la navegación en las aproximaciones a losaeropuertos y puertos. Los sistemas de control de seguimiento envían camionetas yvehículos de emergencia con información óptima sobre las rutas. El métododenominado ‘granja de precisión’ utiliza el GPS para dirigir y controlar la aplicación defertilizantes y pesticidas. También se dispone de sistemas de control de seguimientocomo elemento de ayuda a la navegación en los vehículos utilizados por excursionistas.
¿Qué datos nos proporciona el GPS?Para lograr una plena ubicación en el globo terrestre se ha establecido una serie deparámetros, las cuales son aceptadas por todos los países, estos parámetros son:• Longitud• Latitud• Altitud• Horario• Norte magnético• Norte verdadero.• RumboEn una combinación de los anteriores parámetros podemos establecer exactamentenuestra ubicación.
Tipos de GPS
TARJETA OEMUna tarjeta OEM es un GPS el cual no tiene una presentación grafica, la informaciónque proporciona es de tipo binaria (serial), la cual es procesada a través de unacomputadora para interpretar sus datos, sin embargo esto no le resta potencial ya quela información que nos brinda es muy completa y este tipo de GPS es el mas utilizadopara la realización de proyectos universitarios y comerciales, como ejemplo de estotenemos a las empresas que se dedican a la localización de vehículos vía satélite.
GPS tipo OEM

18
DE LECTURA SIMPLETambién existen el tipo de GPS, para uso deportivo, el cual simplemente sirve comomedio de lectura. Básicamente funciona para actividades de expedición en lascuales se necesita tener las manos libres.Las lecturas que arroja son las siguientes.
GPS de lectura simple
CON PANTALLA GRAFICAEste es un GPS mas trabajado y moderno, tienen un tamaño pequeño y practico, en suinterior procesa la información de los satélites y la interpreta en un pantalla grafica conmúltiples aplicaciones, desde que solo indique la dirección del norte, hasta unaaplicación en software que soporta un enrutamiento vectorial grafico, muestra pequeñosmapas de calles y hasta ciudades en los cuales va representando el movimiento que selleva a cabo.
GPS de pantalla grafica

19
Elección del Sistema de Posicionamiento Global (GPS).
Para la elección del tipo de GPS a usar en este proyecto tuvimos que considerar lossiguientes aspectos:
- El tamaño.- El tipo de información con la cual se establece los parámetros de vuelo tales son: Longitud, latitud, altitud, velocidad, rumbo, hora, numero de satélites disponibles.
Dado que nuestro avión no es muy grande optamos por utilizar un GPS de tipo OEM,ya que este nos proporcionaba la información necesaria y su tamaño es pequeño.
Comunicación entre GPS y PC
El GPS utiliza señales con niveles tipo TTL (+/- 5v), y la PC utiliza niveles tipo RS-232(+/- 12v). Por tal motivo tuvimos que diseñar y realizar la siguiente interfaz:
Interfaz
Como el GPS nos ofrece una salida de recepción y otra de recepción y como la PCtambién usa transmisión y recepción ocupamos el circuito llamado MAX 232, el cual nosofrece la transformación de los niveles TTL a RS-232 y de RS-232 a TTL. Realizandolas conexiones adecuadas y utilizando una interfase DV9, se logro establecer lacomunicación necesaria, con los siguientes parámetros.
Baud Data bits Parity Stop Bits Port4800 8 None One A

20
Como usar el GPS tipo OEM
Primeramente deberemos de conectar el GPS a la interfaz creada para la comunicacióncon la PC, ya que este tipo de GPS no tiene pantalla de vista, la única forma en quepodremos observar la información que nos proporciona será a través de la PC.
Antes de cualquier cosa primero debemos asegurarnos de que las conexiones entre lainterfaz y el GPS sean correctas, para evitar fallas al momento de recibir información.Además de conectar la antena del GPS, de preferencia evitar que quede entre edificios,pues esto puede crear que la información no llegue completa.
Una vez que tenemos la antena ya conectada y las conexiones entre la interfaz y elGPS son correctas. Debemos conectar estos a la PC. Para poder empezar a habilitarlas tramas necesarias.
Antena – Interfaz – GPS
Sabemos que el GPS esta funcionando correctamente si el led de la interfaz estaparpadeando, de lo contrario hay que revisar que es lo que esta fallando.
El GPS tipo OEM proporciona su información en forma de tramas, estas tramas sondiversas.
Existen tramas que proporcionan información como:
Nombre de la trama Información que proporciona
GLL Longitud y latitud GGA Longitud, latitud, altura, No. de satélites etc. VTG velocidad y curso sobre la tierra SAT estado de los satélites ZDA Hora y Fecha Entre otras

21
Estas tramas deben de ser habilitadas en el GPS, el GPS proporciona todas las tramas,pero para que estas sean vistas, deben de ser habilitadas con anterioridad al uso delGPS.
Las tramas son fáciles de habilitar, solo es necesario contar con el programa Crosstalk.Y seguir los siguientes pasos.1) Una vez que se abre el programa aparecerá una pantalla como la que se muestra enla figura a.
Figura aa) En esta parte tenemos que cambiar la velocidad SPeed a 4800 baudb) El POrt a “1”c) Y en la parte de filtros apagarlos. INfilter a Off y OUtfilter a Off.
Una vez que hemos cambiando esto la pantalla deberá observarse de la siguienteforma (figura b):
Figura b

22
Una vez obtenido esto deberemos escribir el comando Go Local, de esta forma elprograma nos enviara a la siguiente pantalla. (Figura c)
Figura c
Aquí es donde habilitaremos las tramas necesarias, dependiendo de nuestrasnecesidades. En este caso si queremos habilitar la trama GGA, debemos de poner F1$PASHS,NME,GGA,A,ON,1| , presionar <Enter> y presionar la tecla de la etiquetaasignada, en este caso F1. Donde:
F1 Es la etiqueta que podría ser F1, F2, o F3.$PASHS encabezado de la tramaNME forma de habilitar la trama de forma continuaGGA Nombre de la trama que queremos habilitarA Nombre del puerto a utilizarON habilitar a encendido la trama1 tiempo en segundos que tardara la trama en aparecer desde 1 a 999.| <Enter>
Aquí mismo se podrá poner cualquier otra trama a habilitar, ya sea de formapermanente como la trama anterior o de forma momentánea como se muestra acontinuación:
F1 $PASHQ,GGA| Donde:
F1 Es la etiqueta$PASHQ encabezado de la tramaGGA la trama a habilitar| <Enter>

23
Esta trama como no tiene tiempo de aparición, solamente aparecerá cada vez que sepresione la tecla F1.Asi mismo se podrán habilitar cualquiera de las tramas que se necesiten, no tienerestricción de tramas, pueden ser 1 o 2 o todas las que se requieran, y cada una en eltiempo que se requiera. De esta forma se pueden habilitar todas las tramas que senecesiten a tiempos distintos de ser necesario, por ejemplo habilitar la trama GGA a 1segundo y la trama VTG a 4etc.
De modo que ya que hemos habilitado las tramas necesarias, las deberemos observaren pantalla como se muestras a continuación.
Tramas GGA y VTG habilitadas
Un a vez que hemos habilitado las tramas necesarias, procederemos a realizar pruebasde comunicación.
Al cabo de hacer algunas pruebas de comunicación con el GPS obtuvimos la siguienteinformación, estos parámetros son cubiertos en su totalidad con la informaciónrecabada por el GPS.
Cabe mencionar que nosotros solo ocuparemos 2 tramas, la GGA y la VTG, ya queestas nos proporcionan la información necesaria.

24
Información que despliegan las tramas GGA y VTG y su significado.
$GPGGA,183244.00,1921.647851,N,09904.424695,W,1,04,1.5,02244.07,M,-09.1,M,,*6A
GPGGA Encabezado183244.00 Hora UTC1921.647851 LatitudN Latitud norte09904.424695 LongitudW Longitud Oeste1 Posición diferencial04 Numero de satélites vistos1.5 HDOP02244.07 AltitudM Metros-09.1 Separación geoidalM Metros‘’ Campo vació*6ª Checksum
$GPVTG,004.58,T,349.17,M,000.87,N,001.61,K,A*46.
GPVTG Encabezado004.58 Curso norte verdaderoT Verdadero349.17 Curso norte magnéticoM Magnetico000.87 Velocidad en nudosN Unidad [nudos]001.61 Velocidad en Km/hK Unidad [Km/h]A Modo autonomo*46 Checksum

25
Pruebas realizadas con el GPS
Algunas de las pruebas realizadas con el GPS nos mostraron que no importa el día quese tomen las muestras de las tramas, las variaciones entre un día y otro no son de granimportancia, las tramas del GPS y la exactitud de la información que arroja dependenexclusivamente de la cantidad de satélites observados en ese momento por el GPS.
Otro dato importante que mencionar es que el GPS no tiene un buen funcionamientocuando su antena queda entre edificios, de preferencia la antena debe de quedar en unlugar visible al cielo, y aunque el GPS si nos proporciona información en estos casos, lainformación mostrada no es de confiar, ya que las tramas llegan cortadas.
Uno de los programas utilizados para observar las tramas de información del GPS es elGPSVehiculo, programa creado para la visualización de la información de formapractica como se muestra en la figura 1.1
Figura 1.1
Como se puede observar en la figura 1.1 se observan los datos que arroja el GPS enforma de tramas, y en forma especifica.
Una vez teniendo la información del GPS y sabiendo cuales eran las tramas que seutilizarían, tuvimos que buscar la forma de que el avión estando en vuelo nosproporcionara la información en tierra, esto se logro por medio de un par de radios, lafunción de estos radios era mandar la información en vuelo a la PC.
Tramas
Información especifica
26
Pruebas de variación de rumbo
Para poder saber el dato del rumbo verdadero realizamos pruebas ubicando en elestacionamiento de la escuela un rectángulo en base a coordenadas dadas por el GPSuna vez ubicado sobre el piso este rectángulo,
trazamos una diagonal, la cual nos sirvió de referencia para recorrer una línea recta enun solo sentido (ayudados de un automóvil), esto lo realizamos en ambas direccionesde la línea y obtuvimos los siguientes resultados.
298 294 295 298 297 298 296 296 298293 299 295 297 296 298 295 296 304295 298 294 297 295 298 296 296 304294 298 294 297 295 297 296 296 301
293 298 298 297 296 297 297 296 300295 297 300 297 295 297 296 296 296293 297 302 297 296 297 296 296 295293 297 301 296 299 297 296 297294 297 301 296 299 296 296 296295 295 299 296 299 296 297 297
Tabla de rumbo dado por el GPS
250
270
290
310
330
350
1 6 11 16 21 26 31 36 41 46 51 56 61 66 71 76 81
Rumbo Vs Tiempo
En la tabla de datos obtenidos veremos una variacion de 293 a 304 variando los valoresentre estos dos limites.

27
Para poder tomar valores intermedios realizamos promedios de 7 en 7 datos a cadalectura y obtuvimos los siguientes resultados.
294 295 296 297 297 297 297 297 297294 296 297 297 297 297 297 297 297295 296 297 297 297 297 297 297 297295 296 297 297 297 297 297 297 300296 297 297 297 298 296 297 300 297296 297 297 297 297 297 297 297 297297 297 297 297 297 296 297 297 297297 297 297 297 296 297 297 297297 297 297 297 296 297 300 297297 297 297 297 297 297 297 297
Tabla de datos promedio de rumbo
260270280290300310320330340
1 6 11 16 21 26 31 36 41 46 51 56 61 66 71 76 81
Grafica de promedios de rumbo
En la tabla y grafico se puede observar que la variacion a disminuido, ya que el rangode variacion ahora es de 294 – 300 en una supuesta linea recta, y se observa un valorpromedio constante de 297 +/- 3°, entonces podemos decir que durante el vuelo lalectura del GPS(rumbo) tendremos un promedio del siguiente valor con los seisanteriores y ese rumbo tendra que estar en el plan de vuelo en un rango de 6° y +/- 3°de la lectura central.
rango de tolerancia
En esta prueba sobre el funcionamiento del GPS hemos aprendido que para obtener laslecturas del rumbo geográfico sin tener una gran dispersión de un punto a otro seránecesario promediar la siguiente lectura dada con las 6 inmediatas anteriores,exceptuando las primeras seis que son los valores iniciales y así tendremos un valorcon poca variación.

28
Pruebas de la lectura de velocidad en GPS
El saber que tan verdadera es la lectura de la velocidad arrojada por el GPS es algoengañoso ya que no contamos con los equipos adecuados para tomar estos datos.Sin embargo estas pruebas se realizaron apoyados en el indicador de velocidad de unautomóvil, cabe mencionar que no se sabe el rango de error que tiene ese velocímetro(el del automóvil), pero para los fines prácticos se creé que dos indicadores develocidad en el mismo sistema en movimiento deben arrojar lecturas similares y si alrealizar las pruebas verificamos que así es, entonces daremos por buena la lectura develocidad del GPS.
Estas pruebas se realizaron en calles cercanas a la universidad así como en la Av.Ignacio Zaragoza (la de más alta velocidad) y los resultados se presentan en lasiguiente tabla.
Estos datos se tomaron a una velocidad constante durante 12 segundos.
Vel. del auto
30 Km/h
TRAMAS GPS
Velocidad enKm/h

29
Velocidad del auto 50 Km/h
Tramas GPS
Velocidad del auto 100Km/h
Tramas GPS
Como podemos observar en las tres pruebas con velocidades diferentes, losindicadores de velocidad nos arrojan lecturas muy similares, por lo tanto damos porverdaderas las lecturas de velocidad que nos arroja el GPS.
Velocidaden Km/h
Velocidad enKm/h

30
Pruebas de duración de la batería del GPS
Para asegurar el funcionamiento correcto del GPS es necesario saber la duración de sufuente de alimentación pues por una falla en el cálculo de la duración de la pilapodríamos perder información importante durante el vuelo o peor aun perderemos laalimentación de la computadora de vuelo, lo cual seria perder el control del avión.
En la primera etapa de este proyecto utilizamos una batería recargable marca Novacellde 9v. a 180 mA, la cual tras ser cargada durante 12 horas continuas nos dio unfuncionamiento correcto del GPS durante 2 horas 15 minutos, cabe mencionar que estabatería tiene un peso de 48 grs. y alimenta a la interfaz, que consta de un max 232 y unregulador de voltaje que regula a 5v.
Esta prueba se realizo de la siguiente manera:
Fue necesario tratar de simular las condiciones a las que se sometería la pila duranteel vuelo, es decir vibración, carga, etc.
Para poder simular la vibración durante esta prueba se prendió en varios intervalos elmotor del avión, es decir se mantenía prendido 10 minutos y se apagaba y otros 10minutos, y así tantas veces como fue necesario hasta que la batería dejo de funcionar.
Conectamos todo el sistema (radio, interfaz, GPS y PC), se activaron las dos tramasnecesarias (VTG, y GGA), se dejo trasmitiendo tomando los datos en la PC y al verificarque ya no transmitía información se verifico la hora inicial y final, tomando comoresultado el tiempo de 2 horas y 15 minutos.
Es importante mencionar que mas adelante será necesario optimizar el espacio y elpeso de lo que se montara en el avión y será necesario elegir otro tipo de batería, a lascuales evidentemente se les tendrá que realizar pruebas de rendimiento en condicionessimilares al vuelo.

31
Pruebas de lecturas tomadas en un mismo punto en diferente día.
Para saber la exactitud y precisión en las lecturas del GPS fue necesario saber que laslecturas tomadas no variaran cuando fueran tomadas en un mismo punto en diferentesdías, estas pruebas se realizaron en la azotea del edificio T, con las siguientesresultados.
Tramas GGA número de satélites
Dia 1
$GPGGA,184609.00,1921.662631,N,09904.416198,W,1,05,2.6,02268.57,M,09.1,M,,*6
Dia 2
$GPGGA,174405.00,1921.663280,N,09904.414540,W,2,07,1.0,02261.57,M,09.1,M,,*6
Es importante observar que el número de satélites vistos por el GPS puede ser ladiferencia entre la exactitud de una lectura y otra, ya que mientras el numero desatélites vistos sea mayor tendremos una lectura mas exacta, y en esta pruebapodemos observar una pequeña variación en las milésimas de minutos entre la lecturade un día y el siguiente, pero hay una diferencia de dos satélites vistos entonces esta esla causa de la variaron en la información, aunque esta variación se puede considerarmínima. Por lo tanto la prueba se considera correcta.

32
Radios
Para la parte del proyecto que requería intercambio de información y comunicación atierra, se probó el funcionamiento de los radios XSTREAM OEM 900 MHZ2,configurándolos de la forma correcta y estableciendo un enlace a distintas distancias,determinado así su alcance, se sabe que tiene un alcance aproximado de 13 Km. (Apunta de vista), pero se probó a esa distancia y la información era enviada de formaincompleta, la distancia máxima a la que se probaron fue de 4Km. Aproximadamente(tomando en cuenta que la transmisión era realizada no a punta de vista si o conedificios y/o casa de por medio), obteniendo buenos resultados ya que los enlaces serealizaron con éxito.
Radio
Pruebas y resultados experimentales.
Dado que la estructura de nuestro avión es pequeña, las antenas utilizadas para lacomunicación son de tipo RPSMA Male, con las siguientes características:
Vista física de la antena

33
Características generales de las antenas utilizadas
En la esta parte del proyecto lo que se hizo básicamente fue probar el alcance de losmódulos XSTREAM OEM 900 MHZ. Estos radios contaban con un software de prueba,con el cual se configuraban los radios con comandos AT2. Para esta parte lo que sehizo fue usar el software MAXSTREAM-CTU proporcionado por MAXSTREAM para darlos parámetros que por default se les asigna a los radios, RPSMA que ambos tuvieranla misma dirección, por que de otro modo no se realizaría una transmisión/recepcióncorrecta y ninguno recibiría la información que se le enviara. A continuación se muestracomo se habilitaron estos radios:
1.- Se utilizó el puerto COM de una PC para comunicarse con el radio, a su vez el radiose conectó a la antena RPSMA Male 900MHz de ½ longitud de onda dipolo, como semuestra en la Figura A.
Figura A

34
2.- Con el software proporcionado se configuraron los radios.
Figura B
a.- En la ventana Setup se habilitó el puerto en el que se conectó el radio en caso deque la PC tenga dos puertos COM y el baud rate al que se desea transmitir que paraestos radios es de 9600, los otros parámetros se dejaron tal y como los proporciona elsoftware y solo se modifica la parte A (lo que esta dentro del recuadro) como se ve en laFigura C.
Figura C

35
b.- En la ventana de Configuration se obtienen los parámetros que por default da elsoftware. La imagen muestra la forma como se configuró:
Figura D
En la figura D se puede ver que en la ventana de Module Address (DT) el valorasignado es un cero, por lo cual el otro radio tendrá el mismo valor, para que puedahaber una comunicación entre ambos radios, además estaba también habilitado elcontrol de flujo, esto se ve en la ventana RTS/CMD (RT), ya que ambos radiosutilizaban estos bits al estar conectados ambos a una PC, lo que no sucederá con elmicrocontrolador, por lo que la configuración de los radios cambiara como se vera masadelante, por lo tanto para esta parte de la prueba basta con esta configuración.
c.- Ya con la configuración se inicio la transmisión, presionando Star en la ventana deCom Test
En la figura E se nos muestra como el software da información sobre la transmisión,esta nos dice cuantos mensajes llegan bien y cuantos mal, el porcentaje de latransmisión que se esta llevando correctamente.

36
Figura E
Figura F
Una vez que se programaron los radios se procedió a realizar pruebas de comunicaciónentre ellos, de modo que pudimos comprobar que el alcance máximo que podíanalcanzar las antenas sin que la información se perdiera fue de 4Km.aproximadamente.Una vez que observamos que los radios se comunicaban perfectamente tanto en larecepción como en la transmisión, procedimos a conectar los radios al GPS, que a finde cuentas este era el objetivo de usar los radios, ya que al ser conectados con el GPS,

37
estos nos proporcionarían la información necesaria para ser capturada en tierra,mientras el avión volaba, cabe aclarar que uno de los radios y el GPS fueron montadosen el avión y el otro fue conectado a la PC para poder recibir la información necesariaen tierra.
Como se menciono anteriormente, el GPS requiere de una habilitación anterior a sufuncionamiento, para que este solo envié las tramas de información que el usuarionecesite. Cabe mencionar que una vez conectado el GPS a uno de los radios, el GPSpuede ser programado por medio de estos (radios), de modo que el usuario puedecambiar la programación de las tramas del GPS, sin necesidad de tenerlo precisamentecerca, de esta forma el GPS puede ser programado por medio de los radios a distanciano mayor a 5Km.
Una vez que se conectaron los radios y el GPS se realizaron unas pruebas defuncionamiento antes de que estos equipos fueran instalados en el avión, estas pruebasde tierra (realizadas en automóvil) nos mostraron que efectivamente el alcance de lasantenas era de aproximadamente 4Km., (tomando en cuenta que existían edificios,casas o construcciones de por medio). No se pudo comprobar si efectivamente elalcance de las antenas era de más, ya que cuando nos comenzábamos a alejar de estadistancia, las tramas de información que arrojaba el GPS llegaban cortadas. Si embargono se pudieron tomar lecturas en lugares donde se pudiera comprobar el alcance apunta de vista de las antenas.$GPVTG,29$GPGGA,201624.00,194.1,K,A*2A$GPVTG,292,T,*2$GPGGA,201627.00,193$GPVTG,294,T,*2D$GPGGA,201630.00,1924.928776,N,0$GPVTG,299,T,293,M,09.5,N,17.6,K,A*251,M,,*6C
Tramas recibidas a distancias mayores de 5 Km.
$GPGGA,201636.00,1924.93554,N,09859.956156,W,1,08,1.0,02252.08,M,09.1,M,,*6B$GPVTG,298,T,292,M,06.7,N,12.4,K,A*2F$GPGGA,201637.00,1924.93632,N,09859.957714,W,1,08,1.0,02252.08,M,-09.1,M,,*6D$GPVTG,298,T,291,M,05.3,N,09.9,K,A*2C$GPGGA,201638.00,1924.93692,N,09859.958948,W,1,08,1.0,02252.58,M,-09.1,M,,*6A$GPVTG,297,T,291,M,04.1,N,07.6,K,A*21$GPGGA,201639.00,1924.93743,N,09859.959990,W,1,08,1.0,02252.58,M,-09.1,M,,*6C$GPVTG,297,T,291,M,03.8,N,07.1,K,A*28
Tramas recibidas a distancias menores de 5Km.
Como podemos observar en los cuadros anteriores, es claramente visible que lastramas de información llegan de forma cortada, a pesar de que la poca información queenviaba era correcta.

38

39
PLAN DE VUELO
PLANEAMIENTO DEL VUELO.Si bien nuestro proyecto esta enfocado en hacer que un avión de aeromodelismo vueleen forma autónoma, primeramente necesitamos crear un plan o ruta de vuelo para quesiga. Para poder lograr esto, primero debemos saber como crear un plan de vuelo. Portal motivo este capitulo nos proporcionara algunas técnicas fáciles de seguir para podercrear una ruta o plan de vuelo correcto.
Para determinar el rumbo, se siguen 5 pasos sucesivos.-
1.- trazar la ruta sobre la carta.2.- medir la ruta geográfica3.- determinar el rumbo geográfico verdadero4.- determinar el rumbo magnético
La ruta geográfica y la declinación magnética se obtienen de la carta, la información delviento se obtiene de la oficina meteorológica, el valor de los errores de la brújula seobtiene de la tabla de desvíos, como podemos ver la información se obtiene dediferentes sitios y en distintos momentos por eso es importante mantener un formatopara registrar todos los datos en un orden adecuado de aparición.
Los siguientes términos y definiciones se emplea comúnmente en aviación y nospodrán ayudar en el entendimiento de los 5 pasos de planeamiento de vuelo.
RUTA GEOGRAFICA. Es la trayectoria que se desea seguir durante el vuelo medidarespecto al norte geográfico.
RUMBO GEOGRAFICO. Es la dirección de la ruta geográfica o la dirección en queapunta el avión con respecto al norte geográfico.
RUMBO MAGNETICO. Es el rumbo geográfico corregido de la declinación magnética.
RUMBO EN BRUJULA. Rumbo magnético corregido de la desviación DE LA BRUJULA.
VELOCIDAD VERDADERA. Es la velocidad del avión dentro de la masa del aire sedetermina corrigiendo la velocidad aérea calibrada con arreglo a la altitud ytemperatura.
VELOCIDAD SOBRE EL SUELO. Es la velocidad del avión con respecto al sueloteniendo en cuenta el efecto del viento.
ANGULO DE DERIVA. Es el ángulo que forma el rumbo geográfico con la rutageográfica

40
ANGULO DE CORRECCION DE DERIVA. Es el ángulo medido con respecto a la rutageográfica que debe virar el avión hacia el viento para contrarrestar la deriva, tanto paramantenerse en la ruta como para regresar a ella.
TRAZADO DE LA RUTA.Casi siempre se trazan las rutas sobre una carta en proyección cónica conforme alambert, estas cartas se pueden considerar como cartas de navegación para su empleoen vuelo, cuando tanto el punto inicial como el de destino están en una misma carta,solo se necesita trazar una línea recta de un punto al otro, cuando estos puntos caen endistintas cartas hay que unir dos o mas cartas y el procedimiento es el mismo trazaruna línea recta en las dos cartas.
DETERMINACIÓN DEL RUMBO MAGNETICO.Los rumbos geográficos se miden con referencia a los meridianos geográficos de lacarta, que inician con el nombre geográfico, las brújulas magnéticas indican el nortemagnético, en muchas zonas el norte magnético no consiste con el norte geográfico, ladiferencia angular entre el magnético y el geográfico se denomina declinaciónmagnética.
La brújula tiene un valor limitado para la información de rumbo en las zonas polaresdebido a las enormes variaciones de la declinación en estas zonas, en las regionespolares se ajusta principalmente el rumbo con los giroscopos. El rumbo magnético secalcula sumando o restando la declinación al rumbo geográfico según que esta seaOeste o Este respectivamente.
Como se ha dicho anteriormente, el Norte geográfico y el Norte magnético no coinciden,hay una ligera diferencia. Puesto que las cartas de navegación indican el rumbogeográfico, se hace indispensable conocer y corregir esta diferencia.
Se denomina declinación a la diferencia angular entre el norte magnético y el nortegeográfico. La declinación es Este cuando el norte magnético está al este del nortegeográfico, y es Oeste cuando el norte magnético está al oeste del norte geográfico.
Una vez obtenido el rumbo geográfico, se calcula el rumbo magnético: si la declinaciónde la zona es Este debe restarse el valor de la declinación; si la declinación es Oestedebe sumarse. Por ejemplo, si la declinación es de 5º Oeste, para volar a un lugar en elrumbo geográfico 210º hay que mantener un rumbo magnético de 210º+5º=215º.
Si la declinación es Este: Rumbo magnéticoº = Rumbo geográficoº - declinaciónºSi la declinación es Oeste: Rumbo magnéticoº = Rumbo geográficoº + declinaciónº

41
COMO REALIZAR UN PLAN DE VUELO
En el proyecto una parte medular es el desarrollo del plan de vuelo, lo cual esta definidocomo la ubicación de la aeronave en cualquier instante de su viaje, para resolver odiseñar un plan de vuelo hay que preguntarse 3 cosas.
- ¿En donde estamos?- ¿A donde vamos?- ¿Cómo hacer para llegar a nuestro destino?
Para la realización de un plan de vuelo debemos partir desde tierra. El método es elsiguiente:
Existen mapas que contienen la superficie que se va a sobrevolar los cuales estánreferenciados por las coordenadas geográficas y coordenadas UTM, dichos mapas sellaman proyecciones, las cuales como ya se menciono anteriormente sonrepresentaciones del globo terrestre en una vista plana, particularmente para lascoordenadas UTM se utiliza la proyección mercator.
Coordenadas UTM
Todo sistema de coordenadas se compone de un origen, un punto que se considera lareferencia y un algoritmo de cálculo de las coordenadas de un punto respecto a eseorigen; así, cualquier punto queda determinado por sus coordenadas respecto a lareferencia.
Hay 2 características principales de las coordenadas UTM:
- Son rectangulares. Esto provoca diferencias frente a las coordenadas angulares,como, por ejemplo, latitud / longitud.
- No determinan un punto: definen un área, cuya magnitud depende de la expresión delas coordenadas. Las coordenadas UTM pueden tener toda la precisión que queramos.
Proyección Mercator
42
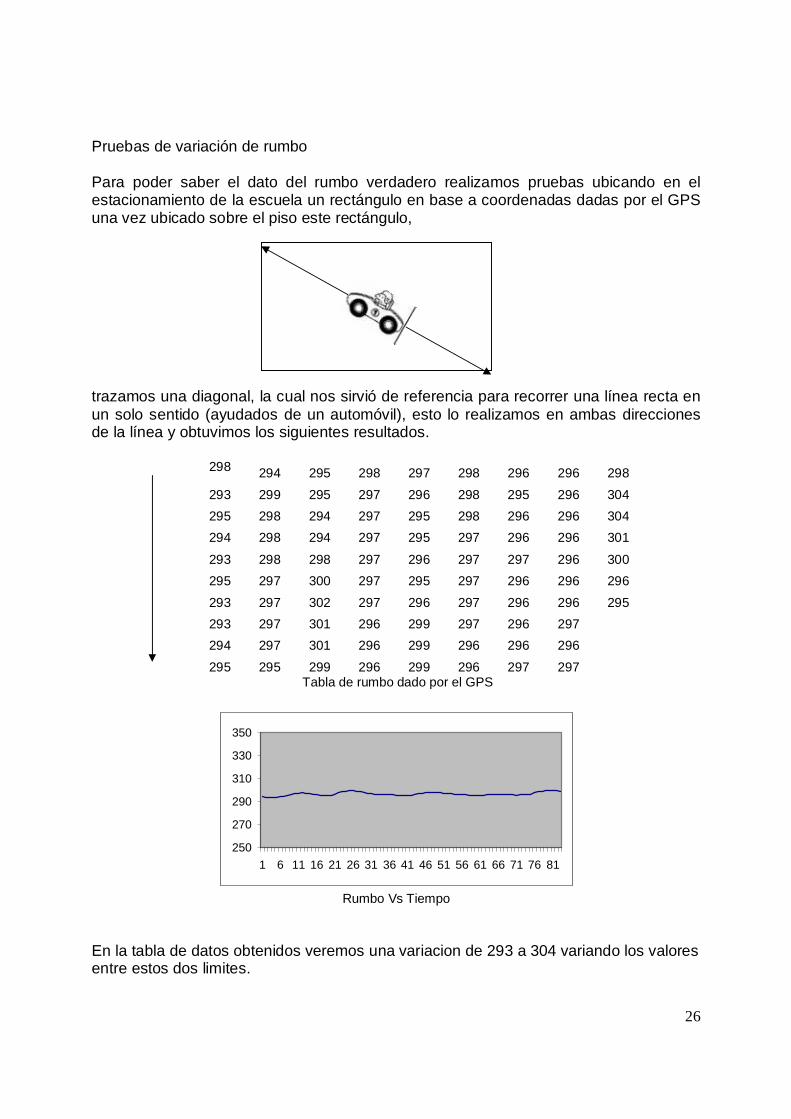
En el sistema UTM se realizan proyecciones sobre un hipotético cilindro transversal quegira alrededor del eje Norte-Sur. Debido a que la deformación crece a medida que nosseparamos del ecuador, la proyección queda limitada entre los paralelos 84º N y 80º S yse completa con una proyección polar estereográfica para las regiones septentrionalesdel planeta (UPS). Ver figura 3.
Figura 3
ORIGEN
Para hablar del origen hay que hablar de las zonas UTM. Las zonas UTM dividen latierra de Este a Oeste en 60 husos (separados 6º y numerados de 1 a 60) y de Sur aNorte en 20 bandas (designadas por letras: de la C a la W separadas 8º y la X 12º). Alespecificar una zona UTM esta determina el origen:
• Para localización horizontal (Este - Oeste), el origen será el meridiano central decada zona UTM, es decir, los meridianos de longitud 3º, 9º, 15º, 21º,..., 165º,171º y 177 tanto Este como Oeste. Dicho meridiano tendrá para nosotroscoordenada 500 Km. Este.
• Para localización vertical (Norte - Sur), el origen será el ecuador (latitud 0º). Sinos situamos en el hemisferio Norte el ecuador tendrá para nosotros coordenadavertical 0. Si nos situamos en el hemisferio Sur, el ecuador tendrá para nosotroscoordenada vertical 10.000 Km.
Para terminar de definir las zonas:La zona 31 está comprendida entre el meridiano de Greenwich (longitud 0º) y elmeridiano de longitud 6º. Su referencia para las coordenadas horizontales será, pues elmeridiano de longitud 3º, cuya coordenada X será 500 Km.; las zonas más al oestetendrán coordenadas X menor de 500 Km. y las más al este, mayor.La letra C corresponde a la banda que va de 80º latitud Sur hasta 72º latitud Sur. Lasdemás se suceden hasta llegar a la banda de letra X, que comprende desde 72º latitudNorte hasta 84º latitud Sur.

43
Coordenadas
Las coordenadas tienen el siguiente formato: son un número impar de cifras.Comienzan por las horizontales y las verticales siempre tienen una cifra más. ¿Por qué?Porque tal y como están tomadas las referencias, las coordenadas Y van a ser por logeneral más grandes ya que distarán más del origen (recordemos que es el ecuador),por lo que la máxima distancia sería la longitud de un arco de 90º con el radio de laTierra. En realidad, es un poquito menos porque la tierra no es exactamente una esfera,está achatada por los polos. En resumen, nunca van a superar los 10.000 Km. (4 cifrassi midiéramos en Km.). Las coordenadas X, por otra parte, no van a superar nunca(siempre que nos movamos dentro de la zona que usamos como referencia) 1000 Km.En realidad la longitud horizontal máxima de una zona, que se da en el ecuador, es deunos 670 Km., por lo que nunca utilizaríamos más de 3 cifras si midiéramos en Km.
PRECISIÓN
La precisión en la definición de la posición es función del número de dígitos. En lasiguiente tabla se muestran unos ejemplos
COORDENADASUTM
ZONA METROS ALESTE
METROS ALNORTE
PRECISIÓNm2
30T685 30T 600000 8500000 10000030T64853 30T 640000 8530000 1000030T6458532 30T 645000 8532000 100030T64574853241 30T 645740 8532410 1030T6457428532414 30T 645742 8532414
COORDENADAS GEOGRÁFICAS
Las coordenadas geográficas son aquellas representadas por la información en gradosde longitud y latitud.
Un sistema universal para la localización de puntos sobre la superficie terrestre. Sebasa en un conjunto de anillos imaginarios que rodean a la esfera terrestre. Unoscírculos corren al Este y al Oeste del meridiano de Greenwich (meridianos) y otroscorren al Norte y al Sur de la línea del Ecuador (paralelos), formando ángulos rectos yque convergen en los polos.
Este conjunto de círculos forma una red de líneas o grilla de referencia, mediante la cualse puede localizar cualquier punto en la superficie terrestre en relación con la línea delEcuador y el meridiano de Greenwich.
Se expresan como unidades de medida angular, en grados, minutos y segundos.

44
Para trazar un plan de vuelo con las coordenadas geográficas es necesario como ya semenciono anteriormente, tener bien claro los puntos de partida y de llegada (origen ydestino), entonces con la ayuda de un mapa referenciado con coordenadas geográficastendremos que ubicar los puntos en longitud y latitud con grados, minutos y segundos,como veremos el plano terrestre se divide en cuatro cuadrantes partido por la línea delmeridiano de Grenwich y el Ecuador como se muestra en la siguiente figura.(Grafico 1).
Gráfico 1
Para buscar un punto por coordenadas geográficas, se debe tener en cuenta el precisocuadrante donde uno se encuentra, ya que tanto la latitud y la longitud se buscan demenor a mayor. Observemos, a continuación, los siguientes gráficos para una mejorcomprensión:
Cuadrante 1: corresponde a la Latitud Norte y Longitud Este (Noreste) (Gráfico 1). Estosignifica que para buscar un punto en este cuadrante se debe partir del vértice inferiorizquierdo de la carta topográfica, ubicando la longitud y la latitud de la siguiente manera(Gráfico 2).
Longitud: de izquierda a derecha 44° 35'.Latitud: de abajo hacia arriba 50° 15'.
Cuadrante 2: corresponde a la Latitud Sur y Longitud ESTE (Sureste) (Gráfico 1). Estosignifica que para buscar un punto en este cuadrante se debe partir del vértice superiorizquierdo de la carta topográfica, ubicando la longitud y la latitud de la siguiente manera(Gráfico 3).
Longitud: de izquierda a derecha 30° 35'.Latitud: de arriba hacia abajo 70° 15'.

45
sGráfico 2 GRAFICO 3
Cuadrante 3: corresponde a la Latitud Sur y Longitud Oeste (Suroeste) (Gráfico 1). Estosignifica que para buscar un punto en este cuadrante se debe partir del vértice superiorderecho de la carta topográfica, ubicando la longitud y la latitud de la siguiente manera(Gráfico 4).
Longitud: de derecha a izquierda 53° 35'. Latitud: de arriba hacia abajo 65° 15'.
Cuadrante 4: corresponde a la Latitud Norte y Longitud Oeste (Noroeste) (Gráfico 1).Esto significa que para buscar un punto en este cuadrante se debe partir del vérticeinferior derecho de la carta topográfica, ubicando la longitud y la latitud de la siguientemanera (Gráfico 5).
Longitud: de derecha a izquierda 24° 35'. Latitud: de abajo hacia arriba 60° 15'.
Grafico 4 Gráfico 5

46
Existe cartografía que ofrece el dato de los minutos expresados en diferentes formas.Ejemplo: Carta Ela. 1:50.000, tiene una regla segmentada; cada segmento representa1' (un minuto) y numeradas cada 5' (cinco minutos) (Gráfico 6).
Long. 44°30' - 44°35' - 44°40' Lat. 50°10' - 50°15' - 50°20'
EJEMPLO: CARTA 1:50.000
Gráfico 6
En otros casos, como generalmente ocurre con la Ela. 1:100.000, los minutos estánrepresentados por pequeñas líneas que se denominan arranques. Normalmente, son decolor negro y de pocos milímetros, se encuentran en todo el borde de la carta. Cadauno de los arranques representa 1' y están numerados cada 10'.
EJEMPLO: CARTA 1:50.000

47
DETERMINACIÓN DE UN PUNTO POR COORDENADAS GEOGRÁFICAS
Antes de la determinación de un punto por coordenadas geográficas, se deben hacercálculos previos, teniendo en cuenta que nuestro problema será determinar lossegundos. (Téngase en cuenta que las cartas UTM nos permiten establecer unaaproximación de un minuto al punto buscado).
Para trabajar con los segundos, debemos determinar cuántos milímetros mide cadasegmento o arranque, según sea la escala, que representa 1', tanto en longitud comoen latitud. Para determinar la constante K, que servirá para transformar milímetros asegundos y viceversa, se debe utilizar la regla de tres simple.
DETERMINACIÓN DE LA CONSTANTE "K"
Lo primero que debe hacerse, es determinar cuántos milímetros hay en un segmentoy/o arranque (el cual representa un minuto) (Gráfico 7).
Para una carta escala 1:50.000, las K serán:
LONGITUD 1'= 60" = 30 mm K (long) = 30 mmLATITUD 1' = 60" = 37 mm K (lat) = 37 mm
Gráfico 7 Gráfico 8
Para un carta Escala 1:100.000, las K serán:LONGITUD 1'= 60" = 16 mm K (long) = 16 mmLATITUD 1' = 60" = 18 mm K (lat) = 18 mm
Nota: se debe tener presente que no todas las cartas a Esc 1:50.000 y 1:100.000 tienenla misma constante K. Se deberá medir este valor de acuerdo a la posición de la cartaen latitud.

48
PUNTO BUSCADO:
Long. E 44°37'40"Lat. N 50°17'55"
Carta Escala 1:50.000
1er. paso: se determina la cuadrícula geográfica de trabajo. (Cuadrante sombreado)(Gráfico 9).
CUADRÍCULA
Long. E 44°35'Lat. N 50°15'
Gráfico 9 Gráfico 10
2do. paso: por medio de los segmentos, ajustar al minuto el punto buscado, tanto enlongitud como en latitud, de la siguiente forma:
Long. E 44°35' + 2' = 44°37'Lat. N 50°15' + 2' = 50°17'
3er. paso: convertir los segundos a milímetros, para ubicar el punto buscado. Por elpaso anterior, se sabe que el punto se encuentra en:
Long. E 44°37' (falta convertir los 40" = X mm)Lat. N 50°17' (falta convertir los 55" = X mm)

49
Para convertir los segundos a milímetros, se empleará la siguiente regla de tres simple:
FÓRMULA DE CONVERSIÓN
60"_______________ K mm
N" _______________ X mm
Esta fórmula se utiliza tanto para la longitud como para la latitud.
Para longitud:
60" _______________ 30 mm (escala 1:50.000)40" _______________ X mm
X = 40" x 30 mm = 20 mm 60"
Para latitud:
60" _________________ 37 mm (escala 1:50.000)55" _________________ X mm
X = 55" x 37 mm = 33,9 mm (se redondea hacia 60" arriba = 34 mm) 60"
Es decir que:
Long. E 40" = 20 mmLat. N 55" = 34 mm
4to. Paso: determinar la ubicación del punto exacto. Una vez determinados estos datosse procede de la siguiente forma:
A. Para longitud Este, se mide 20 mm (2 cm), a partir de los 37' hacia la derecha, y setraza una línea hacia abajo o hacia arriba (depende desde dónde se mide) (Gráfico 11).
B. Para latitud Norte, se mide 34 mm (3,4 cm) a partir de los 17' de abajo hacia arriba, yse traza una línea hacia la izquierda o derecha (depende desde dónde se mide)(Gráfico 11).
C. Donde se cruzan ambas líneas trazadas es donde se encuentra el punto buscado.
Long. E 44°37'40"Lat. N 50°17'55"

50
Gráfico 11
DETERMINAR LAS COORDENADAS GEOGRÁFICAS DE UN PUNTO
Este es un procedimiento inverso al anterior. En este caso se parte desde un puntoubicado en la carta Punto a indicar (Gráfico 12).
Observar que en la cuadrícula de trabajo se parte del vértice superior derecho, es decir,que corresponde al cuadrante 3 (Gráfico 1). Recordar, en todo momento, que siemprese debe partir -tanto en Longitud como en Latitud- de menor a mayor. En este caso, dederecha a izquierda y de arriba hacia abajo.
1er. Paso: ubicar la cuadrícula donde se encuentra el punto a indicar (cuadrantesombreado, Gráfico 12), determinando la longitud y la latitud, es decir:
Longitud O 53° 35'Latitud S 65° 15'

51
CARTA ESCALA 1:50.000
Gráfico 12
2do. paso: por medio de la regla segmentada, se aproxima al minuto el punto a indicar,tanto en longitud como en latitud, de la siguiente forma:
Long. O 53°35' + 1' = 53°36'Lat. S 65°15 ` + 2' = 65°17'
3er. paso: determinar los segundos del punto a indicar. Por el paso anterior se sabeque dicho punto se encuentra en:
Long. O 53°36' (falta determinar los segundos).Lat. S 65°17' (falta determinar los segundos).
Previo a la determinación de los segundos, se debe obtener el dato de cuántosmilímetros existen hasta el punto desde el último minuto. Para ello se trazan dos líneasperpendiculares hacia los segmentos, tanto en longitud como en latitud (Gráfico 14).0

52
Gráfico 13 Gráfico 14
Se mide la distancia en milímetros desde el último minuto (Long, 36' y Lat. 17'), hasta lalínea perpendicular trazada en el Gráfico 10, tanto en longitud como la latitud (Gráfico15).
Los datos obtenidos de la medición son:
Long. O = 15 mmLat. S = 19 mm
Luego, se convertirán los milímetros a segundos, tanto para longitud como para latitud,de la siguiente forma:
FORMULA DE CONVERSIÓN
60" = K mm (Ela. 1:50.000)X" = N° mm

53
Gráfico 15
DATOS:
N° mm = Long. 15 mm | Lat. 19 mmK = Longitud 1' = 60" = 30 mm | Latitud 1' = 60" = 37 mm
Reemplazando valores tenemos:
Longitud:
30 mm = 60"15 mm = X
X = 60" x 15 mm = 30" 30 mm
Latitud:
37 mm = 60"19 mm = X
X = 60" x 19 mm = 30,8" (se redondea hacia arriba 31") 37 mm

54
Por lo tanto, tenemos:
Long. 15 mm = 30"Lat. 19 mm = 31"
Con la obtención de estos últimos datos, se puede referir la coordenada completa delpunto que se desea indicar, que es la siguiente:
Longitud O 53°36'30"Latitud S 65°17'31"
Ejemplo de una secuencia rápida para la determinación de las coordenadas geográficasde un punto (Gráfico 16):
• Ubicación de la cuadrícula de trabajo: Longitud Oeste 53°35' - Latitud Sur 65°15'.• Aproximación al minuto del punto a indicar: Longitud Oeste 53°36' - Latitud Sur 65°17'.• Determinación del punto al segundo, conversión de los milímetros a segundos:Longitud 15 mm = 30" - Latitud 19 mm = 31".
Gráfico 16

55
Una vez que podemos ubicar los puntos de origen y destino se traza una línea rectadesde el origen hasta el destino esa línea será nuestra trayectoria de viaje y será unalínea recta, esta trayectoria nos arroja mucha información de nuestro viaje tomando unmeridiano que pase por esa recta y midiendo con un transportador del meridiano haciala recta podemos determinar el rumbo geográfico que tendrá nuestro avión durante elviaje.
Los puntos que pasan por esta recta son los puntos o coordenadas ideales que nuestroavión llevara durante el viaje.
Como podemos observar en este plan de vuelo ya tenemos toda la informaciónnecesaria para desarrollar la computadora de navegación de nuestro avión.
NOTA: Es importante mencionar que las líneas de los meridianos en grandes distanciasdejan de ser líneas rectas como aparentaría en los mapas de lugares pequeños y sevuelven líneas curvas con las cuales resulta casi imposible medir el ángulo respecto alnorte.
En un vuelo tipo crucero trasatlántico estas líneas pueden ser determinantes paradesarrollar un plan de vuelo adecuado, pero para nuestro proyecto el cual se desarrollaen distancias no mayores a X Kilómetros por las limitaciones de nuestro avión estaslíneas no son de gran importancia.

56
ESTRATEGIA DE VUELO
Apoyados en el plan de vuelo en una carta desarrollamos la estrategia de vuelo paraprogramar en el PIC.
Como ya se menciono antes nosotros partiremos de una posición lineal (¿En dondeestoy?) con una trayectoria definida (¿Por donde pasar para llegar?) y con un destinoestablecido (¿A dónde voy?).
Si nosotros partimos de un punto con una trayectoria definida sobre un sistemacoordenado tendremos tres opciones.
1) Que estemos en la misma trayectoria2) Que nos encontremos a la izquierda de la trayectoria3) Que nos encontremos a la derecha de la trayectoria
Trayectoria
Misma trayectoria a la izquierda a la derecha
(5,0) (5,5)
(0,0) (0,5)Sistema coordenado
Cada una de las tres opciones anteriores tienen variantes, las cuales son:
1) Que este en la misma trayectoria con el mismo rumboQue este en la misma trayectoria con rumbo a la izquierdaQue este en la misma trayectoria con rumbo a la derecha
Angulo de 0° con la trayectoria Angulo distinto de 0° Angulo distinto de 0° Rumbo izquierdo Rumbo derecho

57
2) Que el punto actual se encuentre a la izquierda de la trayectoria con:a) rumbo a la izquierda.b) Con rumbo a la derechac) Con rumbo paralelod) Con rumbo contrario
a) b) c) d)
Angulo distinto de cero Angulo distinto de cero Angulo igual a cero Angulo igual a 180°
3)a) A la derecha de la trayectoria con rumbo a la izquierdab) A la derecha de la trayectoria con rumbo a la derechac) A la derecha de la trayectoria con rumbo paralelod) A la derecha de la trayectoria con rumbo contrario
a) b) c) d)
Angulo distinto de cero Angulo distinto de cero Angulo igual a cero Angulo igual a 180°
Estas consideraciones se han hecho en las 2 dimensiones de longitud y latitud.
En la tercera dimensión encontramos la variación en altura y solo tenemos 3 casosincremento, decremento y constante.

58
ACCIONES A SEGUIR PARA DETERMINAR EN DONDE NOS ENCONTRAMOS.
Lo anterior se puede definir como circunstancias de vuelo y ahora lo que procede esrealizar acciones que detecten esas circunstancias de vuelo. En realidad lo quedebemos saber es en donde estamos con respecto al plan de vuelo inicial (es decir sinos encontramos a la izquierda o a la derecha o sobre la misma trayectoria).Sobre un plano que contenga coordenadas el medio por el cual podremos saber endonde nos encontramos con respecto a la recta inicial en el plan de vuelo es elsiguiente.**Para aclaraciones con los cálculos vectoriales en esta parte del reporte se sugiere verla teoría del cálculo vectorial en el anexo 3.-Es necesario saber de antemano los puntos correspondientes a la recta de latrayectoria para poder compararlos con los puntos que vaya registrando el GPS, a estospuntos, que son las coordenadas actuales del recorrido del avión les llamaremos puntosactuales, es decir el punto actual será la ubicación que tendrá el avión (la lectura delgps) en el momento de la comparación.-Los cálculos que realizaremos dependerán del signo de la pendiente que tenga la rectade trayectoria del plan de vuelo, ya sea positiva, negativa, horizontal o vertical respectoal plano coordenado. A continuación se analizaran todos los casos que puedenpresentarse en la posición del punto actual con respecto a la recta, es decir que elpunto actual se encuentre a la izquierda, a la derecha o sobre la trayectoria.
En la figura podemos observar los tipos de pendientes que tendrá la recta detrayectoria del plan de vuelo. a) Recta con pendiente positiva, b) Recta con pendientenegativa, c) Recta de trayectoria vertical, d) Recta de trayectoria horizontal.

59
Cabe mencionar que los criterios para la ubicación de nuestro punto actual varia deacuerdo al valor de la pendiente ya sea positivo o negativo, asi como a la ubicacion delos ejes coordenados que nos indicaran las coordenadas de longitu y las de latitud.
En esta parte del reporte nosotros suponemos los ejes coordenados de la siguientemanera:
Latitud
Direccion creciente de la coordenada en el eje Y hacia arriba.
Longitud
Direccion creciente de la coordenada en el eje X de izquierda a derecha.
Sin embargo en un ejemplo que presentamos mas adelante veremos que lascoordenadas de latitud crecen de abajo hacia arriba pero las coordenadas de longituden el eje X crecen de derecha a izquierda y el criterio en este caso para la ubicación delpunto respecto a la recta de trayectoria, cambia en el signo de la coordenada en xresultante de la operación resta entre el punto actual y el punto de la recta mas cercanoa este.
En este caso las coordenadas en X crecen de Derecha a izquierda.
Es muy importante tomar en cuenta esta observación y verificar desde la marcación delplan de vuelo en el plano bajo que circunstancias tendremos los ejes coordenados.

60
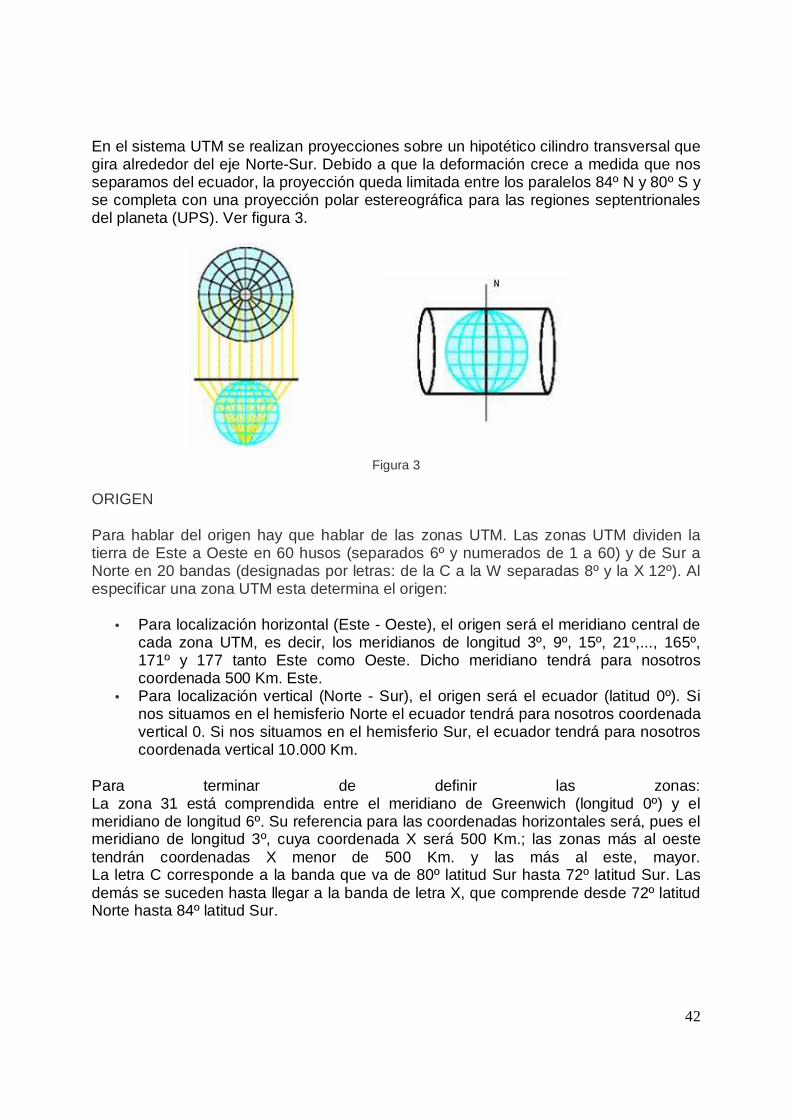
PARA RECTAS CON PENDIENTE POSITIVA
Si nuestra recta de trayectoria(a partir de este momento a la recta de trayectoria delplan de vuelo trazado en tierra le llamaremos recta.) tiene una pendiente positiva y elpunto actual se encuentra a la izquierda de esta, al realizar una resta entre el puntoactual y el punto de la recta mas cercano al punto actual(en el anexo 1 esta el algoritmopara encontrar este punto), el resultado de la realización de esta operación en lacoordenada horizontal será negativo y el de la coordenada vertical será positivo,podemos generalizar este resultado para todos los puntos que se encuentran a laizquierda de la recta, es decir es decir para cualquier punto que se ubique a la izquierdade una recta con pendiente positiva, la resta entre este punto y su mas cercanoperteneciente a la recta tendrá en la coordenada en x un valor negativo y en lacoordenada en y un valor positivo.
0
5
10
15
20
25
1 3 5 7 9 11 13 15 17 19
P ( X , Y)P1 (4,21) Punto actual.P2 (6,7 ) Punto con el que setiene la distancia mínima con elpunto actual.El vector formado entre P1 y P2es perpendicular ala recta detrayectoria, esto nos indica que ladistancia es mínima entre el puntoy la recta.P1-P2 = 4-6,21-7 =(-2,14)
Por lo tanto la coordenada en X

61
Si nuestra recta de trayectoria tiene una pendiente positiva y el punto actual seencuentra a la derecha de esta, al realizar una resta entre el punto actual y el punto dela recta mas cercano al punto actual, el resultado de la realización de esta operación enla coordenada horizontal será positivo y en la coordenada vertical será negativo.Podemos generalizar este resultado para todos los puntos que se encuentran a laderecha de la recta, es decir para cualquier punto que se ubique a la derecha de unarecta con pendiente positiva, la resta entre este punto y su mas cercano perteneciente ala recta tendrá en la coordenada X un valor positivo y en la coordenada Y un valornegativo.
0
5
10
15
20
25
1 3 5 7 9 11 13 15 17 19
Si nuestra recta de trayectoria tiene una pendiente positiva el resultado de la resta es cero enambas coordenadas entonces el punto actual se encuentra sobre la trayectoria.
0
5
10
15
20
25
1 3 5 7 9 11 13 15 17 19
P ( X , Y)P1 (17.5, 2.5) Punto actual.P2 (16, 16 ) Punto con el que setiene la distancia mínima con elpunto actual.El vector formado entre P1 y P2es perpendicular ala recta detrayectoria, esto nos indica que ladistancia es mínima entre el puntoy la recta.P1-P2 = 17.5-16,2.5-16 = (1.5,-13.5)
P ( X , Y)P1(12,12.5) Punto actual.P2 (12,12.5 ) Punto con el que setiene la distancia mínima con elpunto actual.
P1-P2 = 12-12,12.5-12.5 =(0,0)
Por lo tanto la coordenada en Xes cero y la coordenada en Y escero, cuando el punto actual estasobre la recta.
62
PARA RECTAS CON PENDIENTE NEGATIVA.
Si nuestra recta de trayectoria tiene una pendiente negativa y el punto actual seencuentra a la izquierda de esta, al realizar una resta entre el punto actual y el punto dela recta mas cercano al punto actual, el resultado de la realización de esta operación enla coordenada horizontal será positivo y en la coordenada vertical será positivo.Podemos generalizar este resultado para todos los puntos que se encuentran a laizquierda de la recta, es decir para cualquier punto que se ubique a la izquierda de unarecta con pendiente negativa, la resta entre este punto y su mas cercano pertenecientea la recta tendrá en la coordenada x un valor positivo y en la coordenada Y un valorpositivo.
02468
10121416
1 2 3 4 5 6 7 8 9 10 11 12 13 14 15
P ( X , Y)P1(10.5,14) Punto actual.P2 (8.5,7 ) Punto con el que setiene la distancia mínima con elpunto actual.El vector formado entre P1 y P2es perpendicular ala recta detrayectoria, esto nos indica que ladistancia es mínima entre el puntoactual y la recta.
P1-P2 = 10-8.5, 14-7 =(1.5,7)
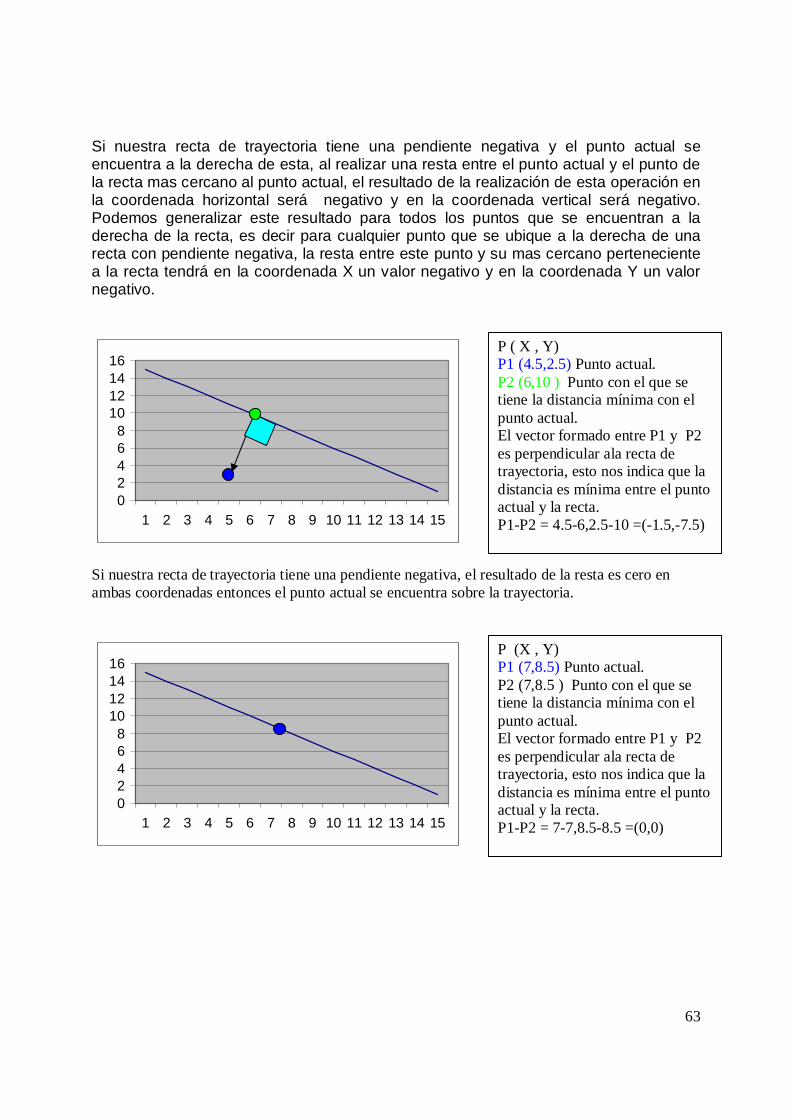
63
Si nuestra recta de trayectoria tiene una pendiente negativa y el punto actual seencuentra a la derecha de esta, al realizar una resta entre el punto actual y el punto dela recta mas cercano al punto actual, el resultado de la realización de esta operación enla coordenada horizontal será negativo y en la coordenada vertical será negativo.Podemos generalizar este resultado para todos los puntos que se encuentran a laderecha de la recta, es decir para cualquier punto que se ubique a la derecha de unarecta con pendiente negativa, la resta entre este punto y su mas cercano pertenecientea la recta tendrá en la coordenada X un valor negativo y en la coordenada Y un valornegativo.
02468
10121416
1 2 3 4 5 6 7 8 9 10 11 12 13 14 15
Si nuestra recta de trayectoria tiene una pendiente negativa, el resultado de la resta es cero enambas coordenadas entonces el punto actual se encuentra sobre la trayectoria.
02468
10121416
1 2 3 4 5 6 7 8 9 10 11 12 13 14 15
P ( X , Y)P1 (4.5,2.5) Punto actual.P2 (6,10 ) Punto con el que setiene la distancia mínima con elpunto actual.El vector formado entre P1 y P2es perpendicular ala recta detrayectoria, esto nos indica que ladistancia es mínima entre el puntoactual y la recta.P1-P2 = 4.5-6,2.5-10 =(-1.5,-7.5)
P (X , Y)P1 (7,8.5) Punto actual.P2 (7,8.5 ) Punto con el que setiene la distancia mínima con elpunto actual.El vector formado entre P1 y P2es perpendicular ala recta detrayectoria, esto nos indica que ladistancia es mínima entre el puntoactual y la recta.P1-P2 = 7-7,8.5-8.5 =(0,0)

64
PARA RECTAS PARALELAS AL EJE HORIZONTAL.
El siguiente caso a analizar será cuando tenemos una recta paralela al eje horizontal.Si nos encontramos con una recta paralela al eje horizontal y el punto actual seencuentra por arriba de esta recta el resultado de la resta será cero en la coordenadaen x y con un signo positivo en Y.
00.5
11.5
22.5
33.5
1 2 3 4 5 6 7 8 9 10 11 12 13 14 15
Si nos encontramos con una recta paralela al eje horizontal y el punto actual seencuentra por debajo de esta recta el resultado de la resta será cero en la coordenadaen x y con un signo negativo en Y.
00.5
11.5
22.5
33.5
1 2 3 4 5 6 7 8 9 10 11 12 13 14 15
Si el resultado de la resta es cero en X y en Y, esto nos indica que estamos sobre larecta.
P ( X , Y)P1(6,3) Punto actual.P2 (6,1 ) Punto con el que setiene la distancia mínima con elpunto actual.El vector formado entre P1 y P2es perpendicular ala recta detrayectoria, esto nos indica que ladistancia es mínima entre el puntoactual y la recta.P1-P2 = 6-6,3-1 =(0,2)
P ( X , Y)P1 (7 , .75) Punto actual.P2 (7 , 2.5 ) Punto con el que setiene la distancia mínima con elpunto actual.El vector formado entre P1 y P2es perpendicular ala recta detrayectoria, esto nos indica que ladistancia es mínima entre el puntoactual y la recta.P1-P2 = 7-7,.75-2.5 =(0,-1.75)

65
PARA RECTAS PARALELAS AL EJE VERTICAL.
El siguiente caso a analizar será cuando tenemos una recta paralela al eje vertical.Si nos encontramos con una recta paralela al eje vertical y el punto actual se encuentraa la izquierda de esta recta el resultado de la resta será cero en la coordenada en Y, ycon un signo negativo en X.
0
0.2
0.4
0.6
0.8
1
1 2 3 4 5 6 7 8 9 10 11 12 13 14 15
Si nos encontramos con una recta paralela al eje vertical y el punto actual se encuentraa la derecha de esta recta el resultado de la resta será cero en la coordenada en Y ycon un signo positivo en X.
0
0.2
0.4
0.6
0.8
1
1 2 3 4 5 6 7 8 9 10 11 12 13 14 15
Si el resultado de la resta es cero en X y en Y, esto nos indica que estamos sobre larecta.
Con los datos obtenidos anteriormente ya sabemos en que posición nos encontramosrespecto ala recta de trayectoria (izquierda, derecha o sobre la misma recta.).
En el anexo 1 encontraremos el metodo para poder encontrar el punto mascercano de la recta de trayectoria al punto actual..
P ( X , Y)P1(2.5,.6) Punto actual.P2 (7,.6) Punto con el que setiene la distancia mínima con elpunto actual.El vector formado entre P1 y P2es perpendicular ala recta detrayectoria, esto nos indica que ladistancia es mínima entre el puntoactual y la recta.P1-P2 = 2.5-7,.6-.6 =(-5,0)
P ( X , Y)P1(12.5,.4) Punto actual.P2 (7, .4) Punto con el que setiene la distancia mínima con elpunto actual.El vector formado entre P1 y P2es perpendicular ala recta detrayectoria, esto nos indica que ladistancia es mínima entre el puntoactual y la recta.P1-P2 =12.5-7,.4-.4 =(5.5,0)

66
Una vez calculada la posición actual con respecto a la ruta establecida procedemos acalcular los ángulos de desviación que tenemos en ese instante de tiempo respecto a latrayectoria establecida.
0
0.2
0.4
0.6
0.8
1
1 2 3 4 5 6 7 8 9 10 11 12 13 14 15
Entonces la información que conocemos del ejemplo anterior es:
La trayectoria con todas sus coordenadas.Rumbo establecido del plan de vuelo actual.Punto actualPosición respecto al punto actualÁngulo entre el vector formado por el origen y el punto actual y el origen y el puntosiguienteRumbo actual del aviónÁngulo entre la direccion actual y el punto siguiente, estimado de la desviaciónnecesaria para regresar al punto siguiente.
RUMBO ACTUAL
ANGULO ALFA
ANGULO BETAPUNTO ACTUAL
PUNTO ANTERIOR
PUNTO SIGUIENTE
TRAYECTOR
ANGULO DEDESVIACIÓNSUGERIDO

67
En el apartado anterior definimos todos los parámetros que podemos conocer del avión,entonces ahora plantearemos como haremos para conocer todos esos parámetros:En la siguiente imagen representamos un instante en el vuelo en donde tenemos elpunto actual y la recta de trayectoria original asi como conocemos todos los puntos deesta trayectoria.
En esta imagen mostramos la trayectoria, el punto actual y el punto siguiente.El punto inicial tiene un valor ……Pi = (5,2)El punto actual es ………………...Pa = (14,14)El punto siguiente es…………...... Ps = (23.5, 6.5)El rumbo de la trayectoria es 73 grados noroeste(este dato es conocido por el plan devuelo original).
Pa
Pi
Ps
Pf

68
Primeramente obtendremos el vector existente entre el punto inicial Pi y Pa.
El vector a = PaPi = Pa – Pi = (14-5,14-2) = (9,12) = 9i+12j
Ahora obtenemos el vector formado entre el Pi y el Ps.
El vector b = PsPi = Ps – Pi = (23.5-5,6.5-2) = (18.5,4.5) = 18.5i+4.5j
Pa
Pi
Ps
Pf
Pa
Pi
Ps
Pf
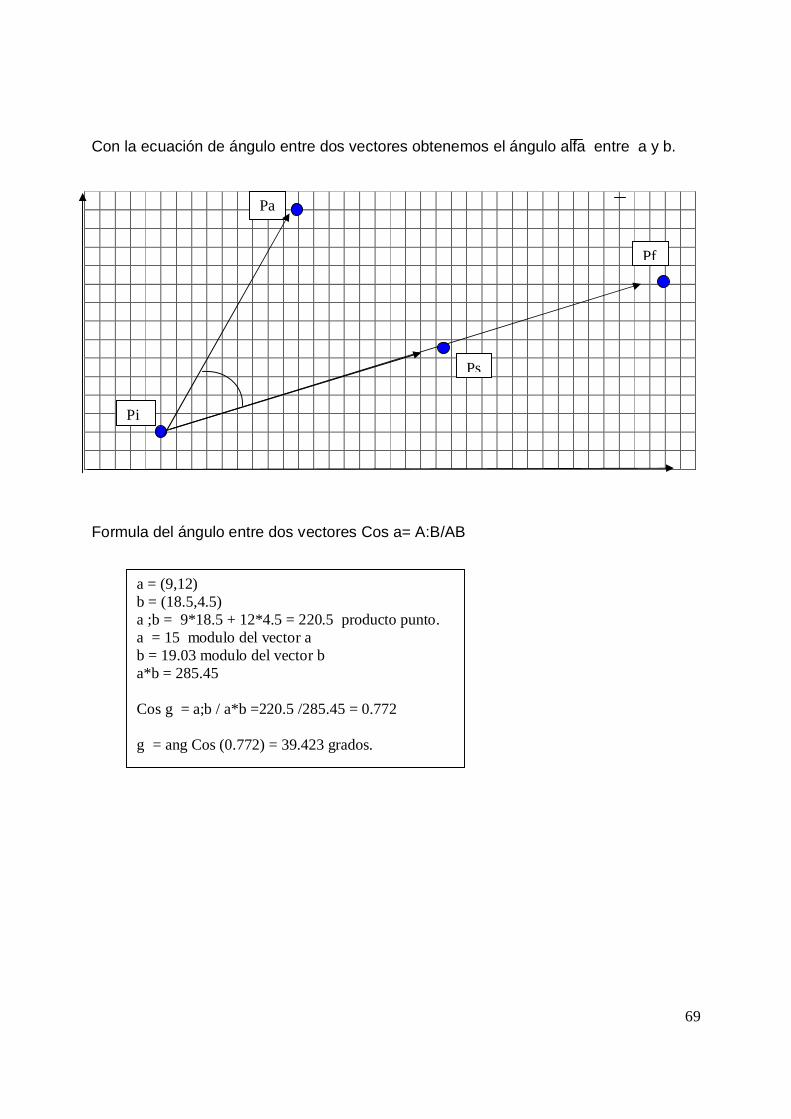
69
Con la ecuación de ángulo entre dos vectores obtenemos el ángulo alfa entre a y b.
Formula del ángulo entre dos vectores Cos a= A:B/AB
Pa
Pi
Ps
Pf
a = (9,12)b = (18.5,4.5)a ;b = 9*18.5 + 12*4.5 = 220.5 producto punto.a = 15 modulo del vector ab = 19.03 modulo del vector ba*b = 285.45
Cos g = a;b / a*b =220.5 /285.45 = 0.772
g = ang Cos (0.772) = 39.423 grados.

70
Calculamos el vector entre Pa y Ps, así mismo calculamos el vector formado por Pa yel punto Pi. Rumbo actual Angulo de corrección de rumbos.
Los vectores resultantes son:
c = Pi – Pa = (5,2) - (14,14) = 5-14,2-14 = (-9,-12)d = Ps – Pa = (23.5,6.5) – (14,14) = 23.5-14,6.5-14 = (9.5 , -7.5)
Con la ecuación de ángulo entre dos vectores obtenemos el ángulo beta.
Por lo tanto restando el valor del angulo obtenido a 180 grados obtenemos la correcciondel rumbo actual necesaria para regresar al rumbo establecido.
180 – 85.6 = 94.4 grados de corrección.
Pa
Pi
Ps
Pf
c;d = -9*9.5+12*7.5 = -85.5 +71.25 = -14.25c = 15d = 12.1
Cos g = -14.25/186 = 0.0766
g = ang Cos ( 0.0766) g =85.6 grados

71
El valor del rumbo actual del avión lo arroja el GPS.
El rumbo inicial es un dato que tenemos desde antes de iniciar el vuelo.
RUMBOVERDADEROSOBRE EL NORTEGEOGRÁFICO.
El valor del rumbo conrespecto al nortegeográfico lo obtenemostrazando el ángulo entreun meridiano y latrayectoria del vuelo.
Este ejemplo muestra latrayectoria entre el estadioazteca y la UAMI
UAM
E

72
El ultimo paso es la indicación de la coordenada de altura, esto lo haremos de lasiguiente forma
En esta imagen presentamos la altura a la que se predispone el vuelo y la altura actualdel avión.
Como salida de nuestra computadora de vuelo nosotros indicamos a la computadora delas superficies de control la diferencia existente entre la altura del avión y la altura de latrayectoria, es decir si nuestro avión esta destinado para volar a 2600 m sobre el niveldel mar y en determinado momento de nuestro trayecto leemos que el avión seencuentra a 2700 m de altura como dato de salida nosotros indicaremos que el avión seencuentra 100 m por encima de lo establecido.
Así mismo debemos saber si la variación en la altura es ascendente o descendente estolo realizamos restando el valor de la altura inicial menos la altura actual, si el valor espositivo nos encontramos con una variación descendente y si el valor es negativo nosencontramos con una variación ascendente.
El enviar el datos si la altura ha descendido o ascendido es fundamental para así lacomputadora de las superficies de control sepa que movimiento hacer con el tren deprofundidad ya sea que realice el movimiento para subir el avión o para bajarlo.
AlturaEstablecida
Incremento en altura
Decremento en altura

73
Estableceremos un rango de error dentro del cual las correcciones que se hagan alavión serán menos bruscas que cuando se salgan de este radio, es decir que el aviónpodrá estar dentro de este rango aunque no este sobre la altura establecida al inicio, sinembargo se harán correcciones con dirección a la altura establecida, y cuando seencuentre próximo a salir de este rango las correcciones tendrán que ser mayores, esdecir que durante la estancia del avión en este rango de error el avión no se desvíaconsiderablemente del plan de vuelo original y su trayectoria actual será oscilatoriadebido a los cambios de altura originados por los vientos en diferentes zonas del cielo.

74
Es decir nosotros no esperamos que la aeronave vuele en un viaje recto y nivelado yaque por la naturaleza del medio en que se desarrolla el vuelo de la aeronave resultaríacasi imposible poder mantener un vuelo nivelado sin embargo todos los avionescomerciales de esta forma es como se transportan no en un vuelo rectos si no mas bienen vuelo con oscilaciones.
El valor de este rango de error será definido cuando las pruebas realizadas en el airenos indiquen como se comporta el avión principalmente en un vuelo tipo crucero endonde se pretenderá dirigir al avión en una trayectoria recta y nivelada para poderapreciar como varían los parámetros que en el avión leeremos por medio del GPS.
Una vez analizado lo anterior podemos decir que los parámetros de salida de nuestracomputadora de vuelo a la computadora que controla la superficies de control son lossiguientes:
a) Ángulo entre el rumbo actual y el punto siguiente el cual sera la correccióninmediata para llegar al punto siguiente..
b) Variación de la altura ascendente o descendentec) Posición del punto actual respecto a la trayectoria (izquierda o derecha de la
recta)d) Angulo de desviación de la recta formada por el punto anterior y el punto actual
con respecto a la recta de trayectoria inicial, esta variación se deberá corregircuando el avión se aproxime a la recta de trayectoria.
Estos datos serán transmitidos a la computadora que maneja las superficies de controly esa computadora se encargara de corregir el rumbo del avión mediante lasecuaciones de movimiento del avión.
Estas ecuaciones serán tratadas en el siguiente capitulo de este reporte.

75
Ejemplo de los algoritmos de la computadora del plan de vueloEn este ejemplo calcularemos todos los datos anteriormente es decir en un instante detiempo congelamos un punto actual y describimos todas sus caracteristicas es decir:
a) Posición del punto actual (izq. o der.)b) Distancia del punto actual a la rectac) Angulo entre el vector formado por el origen y el punto actual y la recta.d) Saber si en la direccion que va tiene algún punto de intersección con la recta.
En este ejemplo tenemos un plan de vuelo completo, es decir tenemos:El origen que es el punto AEl destino que es el punto BUna serie de puntos seleccionados y de los cuales sabemos sus coordenadas enlongitud y latitud, los puntos elegidos en este ejemplo son 20 y su funcionamiento es elsiguiente:Cuando nos encontramos en el punto actual, su destino será el siguiente punto de estaserie de 20, es decir si el punto actual esta entre los puntos 3 y 4 entonces el nuevodestino es el punto 4 y si el punto actual se encuentra entre el punto 8 y 9 el nuevodestino será el punto 9 que en este ejemplo le llamamos punto siguiente.
Un punto al que le llamaremos el punto actual después de iniciar el vuelo que es elpunto C con coordenadas 99 grados 7 minutos y 3.42 segundos en longitud y 19
Punto actual

76
grados 20 minutos 17.8 segundo en latitud y del cual obtendremos su posición,sabremos si en la direccion que va en algún momento interceptaría a la recta detrayectoria original y el ángulo que hay que corregir para regresar a la trayectoriaoriginal en el punto siguiente de la recta.
Las coordenadas de los 20 puntos seleccionados en este ejemplo son:
LONGITUD(GRADOS)
LATITUD(GRADOS)
LONGITUD(DECIMAL)
LATITUD(DECIMAL)
99 9 1.7142 19 18 4.8648 99.1504 19.301399 08 47.1428 19 18 15.4054 99.1464 19.304299 08 34.2857 19 18 25.9459 99.1428 19.307299 08 20.5714 19 18 35.6756 99.1390 19.309999 07 7.7142 19 18 46.2162 99.1188 19.312899 07 54 19 18 56.7567 99.1316 19.315799 07 40.2857 19 19 7.2972 99.1278 19.318699 07 27.4285 19 19 17.8378 99.1242 19.321699 07 14.5714 19 19 27.5675 99.1207 19.324699 07 .8571 19 19 38.9189 99.1169 19.327499 06 48 19 19 48.6486 99.1133 19.330199 06 35.1428 19 20 0 99.1097 19.333399 06 21.4285 19 20 9.7297 99.1059 19.336099 06 8.5714 19 20 20.2702 99.1023 19.338999 05 55.7142 19 20 30.8108 99.0988 19.341899 05 42.8571 19 20 40.5405 99.0952 19.344599 05 29.1428 19 20 51.081 99.0914 19.347599 05 16.2857 19 21 1.6262 99.0878 19.350499 05 2.5714 19 21 19.3513 99.0840 19.355399 04 48.8571 19 21 22.7027 99.0802 19.356399 04 36 19 21 33.2432 99.0766 19.359299 04 23.1428 19 21 43.7837 99.0730 19.3621
Donde el punto inicial es el punto A y el punto final es el punto B, extremos de la recta.
Se debe notar que en este plan de vuelo, el sistema coordenado aumenta en valor delatitudes hacia arriba y en longitudes de derecha a izquierda, por lo tanto el criterio parasaber si se encuentra a la izquierda o a la derecha no es el mismo que el contempladoanteriormente es decir si nos encontramos a la izquierda de la recta el resultado de laresta entre el punto actual y el de la distancia mínima a la recta será positiva en x ypositiva en y.

77
Obteniendo la ecuación de la recta de trayectoria.Nota: La teoria para estas ecuaciones las podemos ver en el Anexo 1.
X1 = 99.0731 X2 = 99.1326Y1 = 19.3622 Y2 = 19.3154
Y = mx+b
m=Dy
Dx=
- 0.0468
0.0595= 0.786554
19.3622 = - 0.786554 *H99.0731L+ bb = 19.3622 + 77.926
= 97.282Y= - 0.786554x + 97.2882
= 19.3231= 19.3217
Laecuacionde larectaes Y= - 0.788554x+97.2882
Eneste instantede tiempoel puntoactual es: C
Para saber de que lado de la recta de trayectoria nos encontramos, es necesario sabercual es la coordenada del punto de la recta con la cual tenemos la distancia minimaentre la recta y el punto actual por lo tanto aplicamos la definición de interseccion entredos rectas perpendiculares y como para que dos rectas sean perpendiculares lapendiente de una debe ser el inverso multiplicativo con el signo cambiado de la otra,tenemos:
m2=1
0.786554
Por lo tanto la ecuación de la recta perpendicular a la recta de trayectoria y quecontiene al punto actual es la siguiente:
Y2=X2
0.786554+ b
m1= −0.786554

78
Sustituyendo las coordenadas del punto actual:
C= 99°07' 18.8'' = 99.1218 19.3382=1
0.786554*H99.1218L+b
= 19°20' 17.83'' = 19.3382 b= - 106.68Ahora ya tenemos las ecuaciones de las dos rectas perpendiculares, solo resta buscarel punto en el cual se intersectan.
Y2 = 1.2713HX2L- 106.68Y1 = 0.786554HX1L+ 97.2882Resolviendoel sistemade ecuacionesY= - 0.786554x + 97.2882Y= 1.2713x - 106.68Y1 = Y2
- 0.786554x + 97.2882 = 1.12713x - 106.68- 2.0578 x = - 203.9682
x= 99.1495Y= 19.3253Puntode interseccionPor lo tanto el punto con el cual se tiene la mínima distancia entre el punto actual y larecta de trayectoria es :
Pƒ ( 99.1495,19.3253 )
Aplicando ladesntaciaentredospuntos
d ="HY2 - Y1L2+HX1 - X2L2 ="H19.3382 - 19.3253L2+H99.1218 - 99.1195L2d= 0.0131
Losdospuntosaacompararson :C=H99.1218, 19.3382LP ¦ =H99.1195, 19.3253LPact = C ® C- P ¦ = 99.1218 - 99.1195 = 2.3 x10- 3 = x
= 19.3382 - 19.3253= 0.0129= YLa coordenada en X es positiva y la coordenada en Y es positiva esta implica que elpunto actual esta a la izquierda de la recta
Ahora calcularemos el Angulo de desviación entre la trayectoria actual y la trayectoriaoriginal.

79
Consideramos como el punto anterior al origen para calcular el ángulo entre el vectorformado por el punto actual y el punto anterior. Este ángulo nos indica correcciónnecesaria para volver ala trayectoria original.
a® =H99.1218, 19.3382Lb® = P® cercanoal punto actual = H99.1195, 1932.53LO=H99.1504, 19.3013LEste es el vector formado entre el origen y el punto actual.Pa® =H- 0.0286, 0.0369LEste es el vector formado por el origen y el punto de la recta mas cercano al puntoactual.
P ¦ = H- 0.0309, 0.024L Cosa =1.7693x10- 3
1.8266x10- 3= 0.9686 a = 14.38°
Este ángulo resulta ser la desviación existente entre la dirección actual y la direcciónoriginal del plan de vuelo, por lo tanto como nuestro avion en este instante de tiempoestaria desviado hacia la izquierda de la recta un angulo de 14.38 grados, tendría queser el valor de este ángulo girado a la derecha (o al noreste) la corrección necesariapara volver al rumbo original..

80
El siguiente ejemplo tomamos un instante siguiente al ejemplo anterior en dondetenemos un punto actual, un punto anterior, para así saber si las correcciones hechasen el instante anterior ha sido correctas o no y poder definir si la nueva trayectoria seesta acercando a la recta original y que ángulo debemos corregir para llegar al siguientepunto.
Ahora realizaremos los cálculos, tomando como punto actual al punto D y como puntoinmediato anterior al punto C.
PUNTO ANTERIOR PUNTO ACTUAL
Partiremos por encontrar cual es la ubicación de nuestro punto actualLas coordenadas del punto actual son:D = ( 99 07´ 10.42´´, 19 20´ 14.5´´) esta coordenada esta dada en grados.D = ( 99.1196 , 19.3373) esta coordenada esta dada en decimal.
Como ya sabemos de ejemplo anterior la ecuación de la recta dada por el plan de vueloen el mapa es la siguiente:
Laecuacionde larectaes Y= - 0.788554x+97.2882

81
Obteniendo el punto de esta recta mas cercano al punto actual:
Como la pendiente de la recta de trayectoria ideal del vuelo es m = -0.786554Entonces la pendiente de una recta perpendicular a esta es : 1 / 0.786554
Sustituyendo en la ecuación de la recta las coordenadas del punto actual tenemos quela ecuación de esta recta perpendicular es:
Y = 1.2713 x -106.6776
Resolviendo el sistema de ecuaciones simultaneas tenemos que el punto mas cercanoal punto actual es:
Pƒ ( 99.1130,19.3316 )
Realizando la resta entre el punto actual y este punto tenemos que :
D- Pƒ = (0.0012,0.0057)
Por lo tanto la coordenada en x es positiva y la coordenada en y es positiva esto nosindica que aun nos encontramos a la izquierda de la recta de trayectoria.
Calculando la distancia entre estos dos puntos tenemos que : Distancia = 0.00575Comparándola con la distancia anterior tenemos que esta distancia es menor por lotanto nos estamos acercando a la recta de trayectoria.
Ahora necesitamos saber si la trayectoria que llevamos del punto anterior al puntoactual, interfecta en algun momento a la recta de trayectoria, para eso calculamos laecuación de la recta que pasa por el punto C y por el punto D, y aplicamos el conceptode interseccion entre dos rectas y si el punto resultante pertenece a la recta detrayectoria entonces podemos decir que siguiendo el rumbo actual en algun momentopasaremos sobre la recta de trayectoria.
La ecuación de la recta que pasa por C y D es:
Y = 0.08256 x + 11.1541
Resolviendo el sistema de ecuaciones simultaneas para esta recta y la recta detrayectoria tenemos que el punto del cruce entre ambas rectas es:
P cruce = ( 99.1056 , 19.3362)

82
Ahora calcularemos el ángulo entre estas dos rectas para saber cual será el ángulo quetendremos que corregir cuando nos aproximemos al siguiente punto de la recta, paraasí llegar al rumbo inicialmente establecido por el plan de vuelo.
Aplicando la ecuación de ángulo entre dos rectas tenemos que el angulo entre las dosrectas es 42.9 grados.
Como el punto de la recta de trayectoria mas cercano al punto actual esP( 97 6 46.8 , 19 19 53.76)
Nos dirigimos a la tabla de datos de los puntos seleccionados de la recta y obtenemosque el punto inmediato siguiente a este punto P es el de las coordenadas :
P sig = ( 99 6 35.1428 , 19 20 0 ) = ( 99.1097,19.3333)
Obteniendo el vector entre el punto actual y el punto de cruce: a = Pcruce – D = (99.1056 , 19.3362) – (99.1196 , 19.3373 ) = ( -0.014, -0.0011)y el vector entre el punto actual y el punto siguiente:b = P sig –D = (99.1097,19.3333) – (99.1196 , 19.3373 ) = ( -0.0099, -0.004)
Calculando el ángulo entre estos dos vectores tendremos el ángulo que debe corregirinmediatamente el avión para llegar al punto siguiente.
Aplicando la ecuación de ángulo entre dos vectores tendremos que el ángulo es igual a17.5 grados.

83
En la siguiente figura se ilustran todos los puntos obtenidos teóricamente en esteejemplo.
Punto actual Punto Punto de cruce anterior Punto siguiente
Punto perpendicular al punto actual

84
En las siguientes figuras se ilustran los vectores y los ángulos que acabamos deobtener:
42.9 grados
Recta que pasa por lospuntos C y D.
Punto de cruce entre la recta que pasa por C y D y la recta de trayectoria.
En esta figura ilustramos el rumbo actual del avión mediante la recta que pasa por C yD y el ángulo que forma con la recta de trayectoria, así como el punto de cruce concoordenadas ( 99.1056 , 19.3362).

85
En la siguiente imagen se ilustra la obtención del ángulo que se debe corregirinmediatamente para llegar al punto siguiente.
Vector formado por el punto actual y el punto de cruce
Angulo de corrección 17.5 GRADOS inmediata para llegar al punto siguiente Vector formado por el punto actual Y el punto siguiente
Como podemos apreciar en estas imágenes para llegar al siguiente punto debemoscorregir un ángulo de 17.5 grados inmediatamente y cuando estemos por llegar a larecta de trayectoria deberemos corregir un ángulo al contrario de 42.9 grados y asíestaremos nuevamente en el rumbo fijado al inicio del plan de vuelo.

86
ANEXO 1
TEORÍA DEL ÁLGEBRA VECTORIAL.
En este anexo incluimos la información necesaria para el diseño teorico dela estrategia de vuelo, es decir la teoría vectorial utilizada, los puntos atratar en este anexo son:
Ubicación de un punto en el espacio.Obtención de un vector a partir de 2 puntos.Calculo de la distancia entre dos puntos.Angulo entre dos vectores.Obtención de una recta.Distancia entre un punto y una recta.Distancia entre dos rectas.Intersección entre dos rectas.Angulo entre dos rectas.

87
Magnitudes escalares y vectoriales
Llamamos magnitud escalar, o simplemente escalar, a toda magnitud quepuede expresarse simplemente con un único número. Por ejemplo, el pesoo la altura de una persona es una magnitud escalar.
Se denomina magnitud vectorial o vector a aquella medida para la cualnecesitamos dar ``algo más que un sólo número''. Por ejemplo, para saberla velocidad del viento además de su intensidad, es decir, tantos kilómetrospor hora, se requiere conocer su dirección y sentido, y así saber si vienedel norte hacia el sur, etc...Este tipo de magnitudes se denominanvectores.
Representación matemática
Matemáticamente un escalar se representa con un único número y unvector con una serie de coordenadas, tantas como dimensiones tenga elespacio en el que se representa.
Así un vector se representa como
siendo Vx, Vy y Vz las componentes del vector, es decir, susproyecciones sobre los ejes x,y y z.. A su vez i, j y k son los vectores unitarios en las direcciones de los ejes x,y y z respectivamente.
Operaciones vectoriales.Se llama módulo de un vector a lo que éste ``mide''. Se calcula como
Proyección de un vector sobre un eje es ``la sombra'' de dicho vector sobreel eje si la ``luz que proyecta dicha sombra'' cayera justoperpendicularmente. Así las proyecciones de un vector v sobre los ejes x, y

88
y z serán vx, vy y vz respectivamente. El inverso de un vector es dichovector con sus proyecciones cambiadas de signo. La suma de un vector ysu inverso da siempre el vector nulo.
Vector nulo es aquel vector cuyo módulo es cero. Este vector es especial,pues carece de dirección y sentido.
Vector unitario de otro dado es aquél que, teniendo la misma dirección ysentido que el que se da, presenta un módulo igual a 1, se representa
como . Así

89
Operaciones vectoriales binarias
Las operaciones binarias necesitan dos vectores para poder operar sobreellos. Las más conocidas son:
Equivalencia
Dos vectores son iguales si sus coordenadas son iguales. Es decir
Suma y restaLa suma de varios vectores también se denomina resultante de dichosvectores. Para sumar un vector a otro se suma componente acomponente, es decir
Para restar un vector de otro se suma el inverso del vector , es decir:
La resta de dos vectores iguales son es el vector cero.

90
Producto escalarEl producto escalar de dos vectores da como resultado un escalar, comoindica su nombre. Para multiplicar así escalarmente un vector a por otro bse opera
Siendo el ángulo que forman los vectores entre ellos.El producto escalar de dos vectores, dadas sus componentes, se puederealizar también sabiendo que
Se pueden deducir las siguientes propiedades del producto escalar:
• Es nulo si alguno de los dos vectores es el vector nulo.• Es nulo si los dos vectores son perpendiculares.• Para proyectar un vector sobre un eje marcado por un vector basta
con realizar la operación
• Dados dos vectores se puede calcular el ángulo que forma entre ellosusando la relación

91
Producto vectorialIntroducciónEl producto vectorial, representado como o bien como , tienelas siguientes propiedades:
• Es perpendicular tanto a como a . Es decir, y .• Su módulo es , siendo el ángulo que forman entre ellos.
También, .• Su sentido está dado por la regla del sacacorchos, entendiendo que
hay que ``mover el sacacorchos'' desde el primer vector al segundo.

92

93
Distancia de un punto a una recta
La distancia de un punto a una recta es la medida sobre una rectaperpendicular a la anterior y que pase por el punto (lógicamente).
Como nos darán la ecuación de la recta, sabremos la pendiente dela recta (sea m esta pendiente), entonces la pendiente de lasrectas perpendiculares a esta tendrán pendiente -1/m. Comoademás esa recta tiene que pasar por el punto que nos dicen, nosserá muy fácil calcular la ecuación de esa recta.
Ya tenemos entonces las ecuaciones de las dos rectas. Siresolvemos el sistema de ecuaciones formado por las ecuacionesde las dos rectas, obtendremos el punto en el que se cortan lasrectas.
Ya tenemos entonces las coordenadas de dos puntos (uno elpunto original y otro sobre la recta, este punto es el mas cercanoal primero), y entonces si hacemos un dibujo de los dos puntos yponemos las coordenadas de los puntos sabremos calcular ladistancia.

94
RECTAS ; ANGULO, DISTANCIA, PERPENDICULARIDAD,PARALELISMO E INTERSECCION ENTRE DOS RECTAS.
Sean l1 y l2 dos rectas no verticales, cuyos ángulos de inclinación son θ1 yθ2 respectivamente. Al cortarse las rectas l1 y l2 forman cuatro ángulosiguales de dos en dos, esto es: β1 = β2 = θ1 – θ2 y α1 = α2 = 1800 - β1.
Se define el ANGULO entrel1 y l2comoel ángulo positivo obtenido al rotar larecta l2 hacia l1 .En este caso, el ángulo entre l1 y l2viene dado por:β1 = θ1 - θ2 (1)
Fig. 4.14
El propósito ahora es establecer una relación entre las pendientes de dosrectas y el ángulo entre ellas.
De la igualdad (1) se tiene:
tan β1 = tan (θ1 - θ2)
, (2)
También,
cot β1 = cot (θ1 - θ2)
, (3)
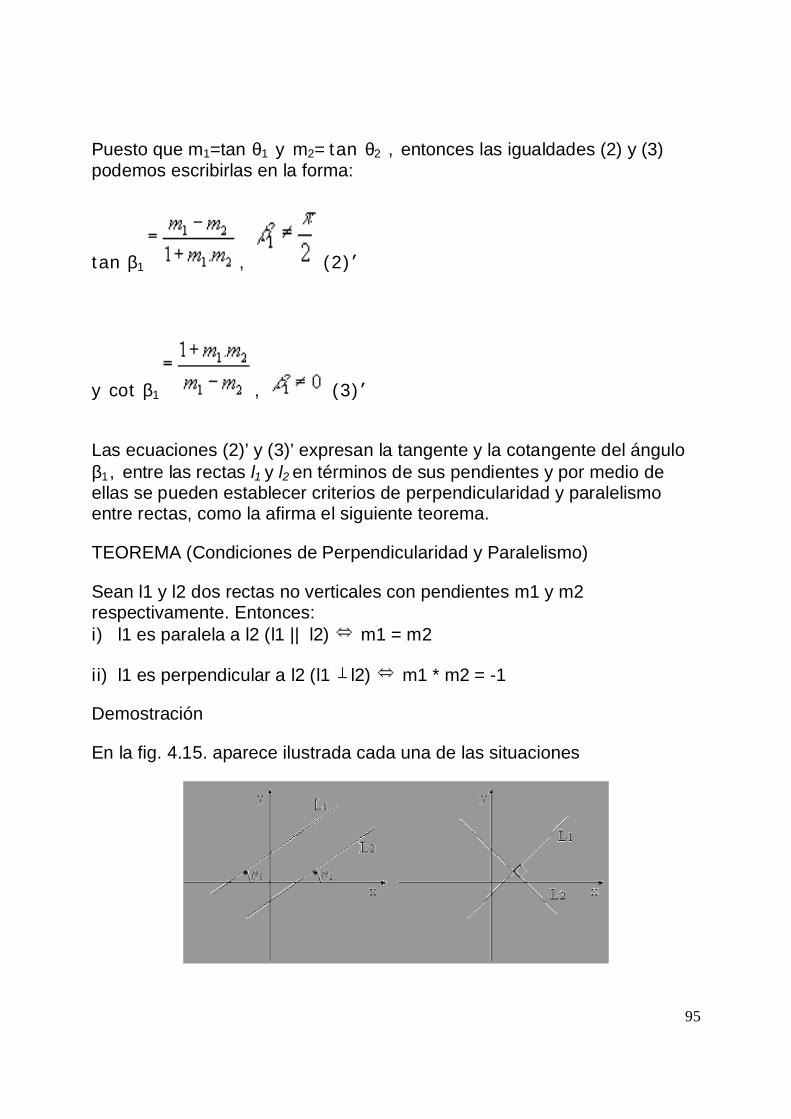
95
Puesto que m1=tan θ1 y m2=tan θ2 , entonces las igualdades (2) y (3)podemos escribirlas en la forma:
tan β1 , (2)
y cot β1 , (3)
Las ecuaciones (2)’ y (3)’ expresan la tangente y la cotangente del ánguloβ1, entre las rectas l1 y l2 en términos de sus pendientes y por medio deellas se pueden establecer criterios de perpendicularidad y paralelismoentre rectas, como la afirma el siguiente teorema.
TEOREMA (Condiciones de Perpendicularidad y Paralelismo)
Sean l1 y l2 dos rectas no verticales con pendientes m1 y m2respectivamente. Entonces:i) l1 es paralela a l2 (l1 || l2) m1 = m2
ii) l1 es perpendicular a l2 (l1 l2) m1 * m2 = -1
Demostración
En la fig. 4.15. aparece ilustrada cada una de las situaciones

96
fig. 4.15.i. Suponga que l1 || l2 y vea que m1 = m2.En efecto, como l1 ||l2, entonces los ángulos q1 y q2 son iguales porcorrespondientes y en consecuencia tan(q1) = tan(q2), es decir, m1 = m2 .Ahora, si m1= m2 , se sigue de (2)’ que tan(b1) = 0, y de aquí, b1 = q1 - q2= 0, de dondeq1 = q2 y por lo tanto l1 y l2 son paralelas.
Si l1 y l2 son perpendiculares, entonces y cot(b1) = cot (Pi/2)=0;Sustituyendo
este último valor en (3)’ obtenemos: 0 , de donde
m1* m2 + 1 = 0, y de aquí se deduce que m1. m2 = -1.
Recíprocamente, si m1*m2 = -1, entonces y como m2=tan(q2) y
m1=tan(q1) , se tiene que , donde sin pérdidade generalidad hemos escogido la recta l1 con mayor inclinación q1.Teniendo en cuenta que tanto q1 como q2 son ángulos positivos y menoresque 180, concluimos que: q1 = 90 + q2, de donde q1 – q2 = 90 y por lotanto las rectas l1 y l2 son perpendiculares
Observaciones
i. Si las rectas l1 y l2 están dadas por las ecuaciones en formageneral
Ax + By + C = 0 y

97
A1x + B1y + C1 = 0 puesto que y , entonces lascondiciones
de paralelismo y perpendicularidad del teorema pueden enunciarse enla siguiente
forma:
l1 || l2
l1 l2
Un caso especial del paralelismo entre rectas es la coincidencia. Unacondición nece-saria y suficiente para que dos rectas l1 y l2 sean coincidentes es laproporcionalidad entre sus coeficientes. Es decir, las rectas de ecuaciones
Ax + By + C = 0 y A1x + B1y + C1 = 0 son coincidentes
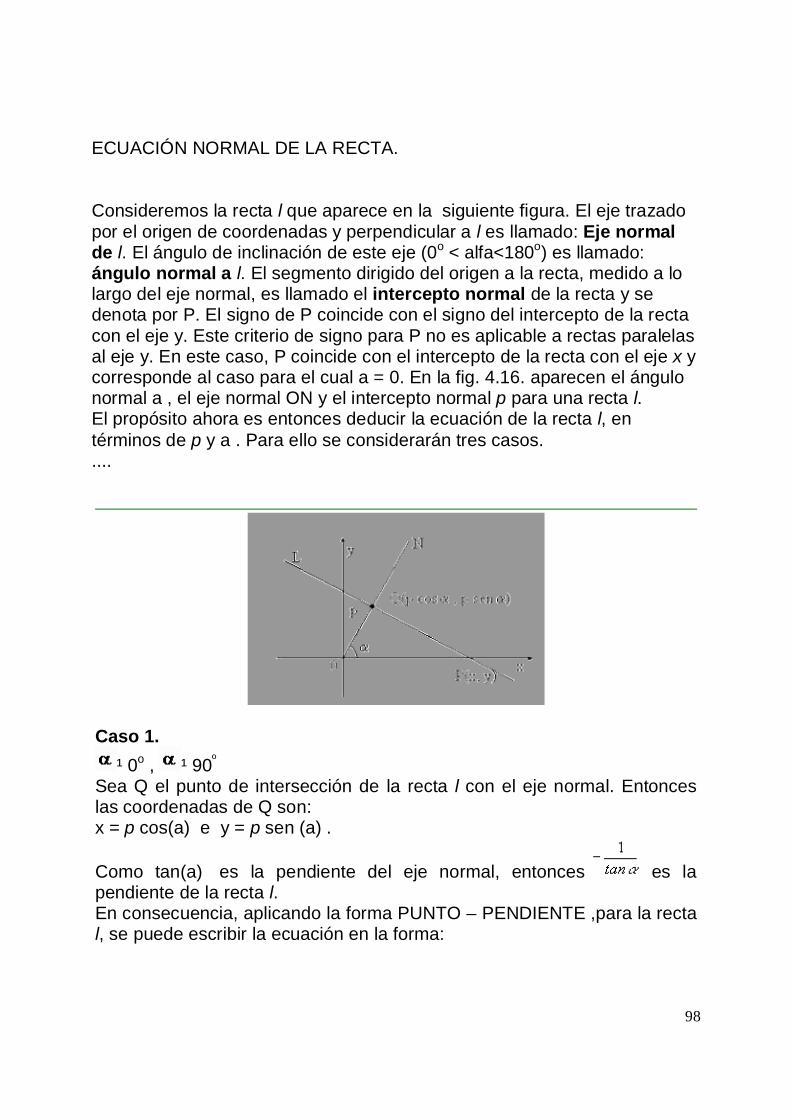
98
ECUACIÓN NORMAL DE LA RECTA.
Consideremos la recta l que aparece en la siguiente figura. El eje trazadopor el origen de coordenadas y perpendicular a l es llamado: Eje normalde l. El ángulo de inclinación de este eje (0o < alfa<180o) es llamado:ángulo normal a l. El segmento dirigido del origen a la recta, medido a lolargo del eje normal, es llamado el intercepto normal de la recta y sedenota por P. El signo de P coincide con el signo del intercepto de la rectacon el eje y. Este criterio de signo para P no es aplicable a rectas paralelasal eje y. En este caso, P coincide con el intercepto de la recta con el eje x ycorresponde al caso para el cual a = 0. En la fig. 4.16. aparecen el ángulonormal a , el eje normal ON y el intercepto normal p para una recta l.El propósito ahora es entonces deducir la ecuación de la recta l, entérminos de p y a . Para ello se considerarán tres casos.....
Caso 1.¹ 0o , ¹ 90º
Sea Q el punto de intersección de la recta l con el eje normal. Entonceslas coordenadas de Q son:x = p cos(a) e y = p sen (a) .
Como tan(a) es la pendiente del eje normal, entonces es lapendiente de la recta l.En consecuencia, aplicando la forma PUNTO – PENDIENTE ,para la rectal, se puede escribir la ecuación en la forma:

99
(1)
ó
y sen a - p sen2 a = - x cos a + p cos2 a
x cos a + y sen a = p (sen2 a + cos2 a ). Es decir,
x cos a + y sen a = p (2)La ecuación (2) es llamada la forma normal de la línea recta.Nótese que el coeficiente de y en la última ecuación es siempre positivo,puesto que0o 180º.
Caso 2. = 90º
En este caso l es paralela al eje x y por lo tanto la ecuación de l puedeescribirse y – P = 0 (3)
Caso 3. = 0o
En este caso l es paralela al eje y y P coincide con el intercepto de la rectal con el eje x. Así que la ecuación de l puede escribirse en la forma: x – P= 0 (4).Puede notarse que las ecuaciones (3) y (4) pueden obtenerse de (2)haciendo a = 90º y a = 0o respectivamente. Por lo tanto, la forma normalde la linea recta es en cualquier caso, la expresada por la ecuación (2).

100
COORDENADAS DEL PUNTO DE INTERSECCIÓN ENTRE DOSRECTAS.
En la observación al teorema sobre paralelismo y perpendicularidad entrerectas, se hizo notar que si dos rectas l1 y l2 cuyas ecuaciones vienendadas por Ax + By + C = 0 y A1x + B1y + C1 = 0 con A, A1, B, B1 0,
entonces la proporción determinaba el paralelismo entre las
mismas. Mas aún, la relación establece la coincidencia entrelas rectas.
Cuando entonces las rectas de ecuaciones Ax + By + C = 0 yA1x + B1y + C1 = 0 se cortan o interceptan en un punto único P(x, y) delplano.
Las coordenadas x e y del punto de intersección son la solución delsistema de dos
ecuaciones con dos incógnitas:
Dicho sistema puede resolverse por cualquiera de los métodos vistos enlos cursos de álgebra.
Es decir resolviendo un simple sistema de dos ecuaciones con dosincógnitas sabremos el punto en el cual se interceptan las rectas en elespacio.
Ejemplo:
Sean las rectas y = 2x e y = x - 5. Para calcular el punto donde se cortanesas rectas, resolvemos el sistema. Sustituyendo en la segunda ecuaciónel valor de y de la primera tenemos: 2x = x - 5. Luego x = - 5 e y = -10.

101
ECUACIONES DE LAS BISECTRICES DE LOS ÁNGULOSDETERMINADOS POR DOS RECTAS QUE SE CORTAN
Considere dos rectas l y r no paralelas a ninguno de los ejes coordenadosy sea P el punto de intersección entre ellas.Sean Ax + By + C = 0 y A1x + B1y + C1 = 0 las ecuaciones de l y rrespectivamente.
Sean b y b’ las rectas que determinan las bisectrices de los ángulos que seforman en P.En geometría plana se demuestra que b y b’ son perpendiculares y queademás todo punto sobre la bisectriz de un ángulo equidista de los ladosdel ángulo. (fig. 4.17)Sea entonces P(x, y) un punto cualquiera de las bisectrices b o b’.De acuerdo a lo anterior, d(P, l) = d(P, r).Esto es,
(1)Equivalentemente,
(2) ó
(3)(Recuérdese que x = y o x = -y)
Las igualdades (2) y (3) proporcionan entonces las ecuaciones de lasbisectrices b y b’ de los ángulos que forman las rectas l y r. Se puede

102
demostrar fácilmente y lo dejamos como ejercicio para el lector, que dichasrectas son perpendiculares usando el concepto de pendiente.LA PARALELA MEDIA Y LA DISTANCIA ENTRE DOS RECTASPARALELAS
Considere nuevamente dos rectas l y r paralelas y de ecuaciones:l: y = mx + b1 ó l: mx – y + b1 = 0r: y = mx + b2 ó r: mx – y + b2 = 0Supóngase además que 0 < b1 < b2.Sean B1 y B2 los puntos donde las rectas l y r cortan respectivamente el ejey
Por el punto medio B del segmento , trazamos la paralela a l. Dicharecta se conoce en geometría como la paralela media de l y r. Es evidente
que su intercepto con el eje y es y como es paralela a l y r supendiente es m.
Luego, (3) es la ecuación de la paralela media de l y r.Se puede determinar ahora la distancia entre l y r.Al llamar yDe acuerdo a la fórmula de la distancia de un punto a una recta, se tieneque:
Igualmente,

103
.
Pero que representa la distancia entre las rectas paralelas es tal que:
es la distancia entre las rectas paralelas ly r

104
ANEXO 2
En este anexo encontraremos la información técnica necesaria para sabercon que realizamos la interfaz que hace posible la comunicación serial delGPS con los radios o con la PC.
La transmisión de información la realiza el GPS mediante comunicaciónserial de ocho bits, sin BIT de paridad y con un BIT de parada, los nivelesde voltaje manejados por el GPS son niveles TTL o niveles CMOS quequiere decir que son niveles de 5 volts aproximadamente, y los nivelesutilizados para la transmisión de datos por la PC son niveles RS232 de 12v, entonces es necesario realizar una interfaz que nos transforme losniveles TTL a RS232 y viceversa para así volver compatible lacomunicación en dirección GPS a RS232 y RS232 a GPS, entoncestuvimos que proceder a buscar un integrado que nos realizara esta interfazapoyado con componentes electrónicos, el resultado de esta búsqueda fuela utilización de un circuito llamado MAX 232 del cual a continuaciónpresentamos su hoja técnica.

105
Una vez conocida la información técnica, ahora es necesario realizar losdiagramas de conexión de esta interfaz.
Como se puede observar en la hoja técnica, el MAX 232 tiene un modulode entradas para niveles TTL conectado con las salidas a los nivelesRS232, y a su vez uno con entradas para niveles RS232 con salidas paraniveles TTL, entonces con este circuito podremos satisfacer nuestranecesidad de tener una comunicación en ambos sentidos es decir del GPSa la PC y a su vez de la PC al GPS.
Una vez realizadas las conexiones nuestro circuito de interfaz queda de lasiguiente manera.
TRANSMISIÓNDEL GPS
RECEPCIÓNDEL RS232
RECEPCIÓNDEL GPS
TRANSMISIÓNDEL RS232
MAX 232

106
ANEXO 3.
RADIO XSTREAM OEM 900MHZ.
EL radio XSTREAM OEM 900 MHZ. es una rápida solución que transfierecadenas de datos asíncronos sobre el aire entre dos módulos.Esta parte contiene información básica de las formas de operación,configuración y programación del radio XSTREAM.
CARACTERÍSTICAS
DIAGRAMA A BLOQUES
ESTE ES EL DIAGRAMA A BLOQUES INTERNO DEL RADIO XSTREAM .

107
DESCRIPCIÓN DE LOS PINES DE SEÑAL
TABLA DE DESCRIPCIÓN DE LOS PINES DE SEÑAL.
Todos los pines operan a través de niveles de VCC CMOS. Cinco de lospines mas usados en las aplicaciones de los radios XSTREAM son:
• DI (PIN 4 – DATA IN)• DO (PIN 3 – DATA OUT)• VCC (PIN 10 – POWER)• GND (PIN 11 – GROUND)• (PIN 1 – CLEAR-TO-SEND)

108
APLICACIÓN : APLICACIÓN-CONEXIÓN A UN PROCESADOR.
COMUNICACIÓN SERIAL
El radio XSTREAM se comunica a cualquier equipo a través de su puertoserial. El radio XSTREAM puede comunicarse con cualquier interfaseUART o a través de un cable RS232/485/422.
EQUIPOS QUE CONTENGAN UNA INTERFASE UART PUEDENCONECTARSE DIRECTAMENTE CON EL RADIO A TRAVÉS DE SUSPINES.

109
A TRAVÉS DE SU PUERTO SERIAL LOS EQUIPOS PUEDENCONECTARSE DIRECTAMENTE A LOS RADIOS.
Los datos entran a el radio a través del el pin DI como una señal asíncrona.cada paquete de datos consiste en un start bit (LOW), 8 bits de datos y unstop bit(HIGH) como es mostrado en la siguiente figura :
EL RADIO TRANSMITE 8 BITS DE DATOS SOBRE EL AIRE, EL STARTBIT Y EL STOP BIT NO SON TRANSMITIDOS.
Una vez que los datos han entrado a el radio a través del pin DI sonalmacenados en el DI buffer hasta que puedan ser transmitidos. Una vez

110
que el primer byte de datos entra al DI buffer, el radio inicializa el canal deradio frecuencia(a menos que esté recibiendo datos ). En el DI buffer losdatos son encapsulados de la siguiente forma :
PAQUETE RF
MODOS DE OPERACIÓN
El radio XSTREAM opera en cinco modos y solo puede operar en un modoa la vez. MODOS DE OPERACIÓN

111
MODO DE OPERACIÓN IDLE
El radio XSTREAM opera en el modo IDLE cuando no hay datostransmitiendo ni datos recibiendo. El radio pasa de este modo a otro bajocualquier de las siguientes condiciones :
1. Se están recibiendo datos en DI buffer (radio pasa a el modotransmit).
2. Datos son recibidos por la antena (radio pasa a el modo receive).3. El modo command esta siendo utilizado (radio pasa a el modo
command).4. Condiciones del modo sleep son validadas (radio pasa a el modo
sleep).
MODO DE OPERACIÓN TRANSMISIÓN.Cuando el primer byte de datos atraviesa por el pin DI y llega al di buffer, elradio pasa del modo IDLE a el modo transmisión. Una vez en el modotransmisión, el radio inicializa el canal de transmisión. Durante lainicialización de el canal de transmisión los datos son acumulados en el dibuffer. Una vez que el canal es inicializado, los datos son agrupados enpaquetes de 64 bytes y son transmitidos. el radio continua transmitiendohasta que el DI buffer se vacía. una vez terminada la transmisión el radioregresa a el modo IDLE, este proceso se muestra en la sig. figura :
TRANSMISIÓN DE DATOS
MODO DE OPERACIÓN RECEPCIÓN.

112
Si el radio detecta que se están transmitiendo datos sobre el aire y estaoperando en el modo IDLE, este pasa del modo IDLE a el modoRECEPCIÓN para poder recibir datos. Cuando se reciben todos los datos,el radio los examina a través de un código de redundancia cíclica (CRC)para asegurarse que los datos son recibidos sin error. si el CRC esinvalido los datos son descartados. si el CRC es valido los datos sonalmacenados en el DO buffer, este proceso es mostrado en la siguientefigura:
RECEPCIÓN DE DATOS
MODO DE OPERACIÓN SLEEP.
El modo SLEEP es habilitado en el radio para estar en un estado de bajoconsumo de energía para cuando no se esta en uso. Para entrar en elmodo SLEEP el siguiente caso debe de ocurrir :
- El radio debe de estar en el modo IDLE (no recibiendo ni transmitiendo datos ) por un tiempo definido por el

113
usuario.
Una vez estando en el modo SLEEP, el radio no transmitirá o recibirá datoshasta que este primero regrese a el modo IDLE. El modo SLEEP eshabilitado o deshabilitado a través de los comandos SM.
MODO DE OPERACIÓN COMANDOS AT.El modo COMANDOS AT provee un estado en el cual se pueden ajustarlos parámetros del radio xstream dependiendo de las características de laaplicación que se desee.
COMANDOS AT.Los comandos AT son una serie de recursos que permiten a los usuariospoder configurar el radio basándose en sus necesidades especificas .Para poder utilizar los comandos, el radio debe de estar en el modoCOMANDOS AT. Los comandos AT pueden entonces ser enviados a elradio usando comandos ASCII, estos pueden ser enviados usando elsoftware x-CTU o por medio de una hyperterminal.En la siguiente tabla se enlistan los comandos AT que se pueden utilizar :
COMANDOS AT .