two level control of
TRANSCRIPT
TWO-LEVEL CONTROL OF
Processes with Dead Time and Input Constraints
Qing-Chang Zhong∗ and Chang-Chieh Hang∗∗
[email protected], [email protected]
∗School of Electronics
University of Glamorgan
United Kingdom
∗∗Dept. of Elec. & Comp. Eng.
National Univ. of Singapore
Singapore
Outline
Background information
Motivation
Two-level control signal
Controller design
Implementation of the controller
Simulation examples
Q.-C. ZHONG & C.-C. HANG: TWO-LEVEL CONTROL OF PROCESSES WITH DEAD TIME AND INPUT CONSTRAINTS – p. 2/25

Background informationregulationv.s. set-point responses
regulation: the major taskset-point responses: often necessary2DOF controller
fast set-point response
fast but without overshootdead timeinput constraint
In general, this is difficult. However, for some pro-cesses, this can be done.
Q.-C. ZHONG & C.-C. HANG: TWO-LEVEL CONTROL OF PROCESSES WITH DEAD TIME AND INPUT CONSTRAINTS – p. 3/25

Systems under considerationThe most common chemical processes:the first-order plus dead time (FOPDT)
G(s) =Ke−τs
Ts + 1,
whereK is the static gain,τ is the dead time andT isthe apparent time constant.
G(s)ZOHC(z)F (z) i i- - - - - - -?
��
6
d(s)y(s)r(z) r′ e u
−
Ts
Q.-C. ZHONG & C.-C. HANG: TWO-LEVEL CONTROL OF PROCESSES WITH DEAD TIME AND INPUT CONSTRAINTS – p. 4/25
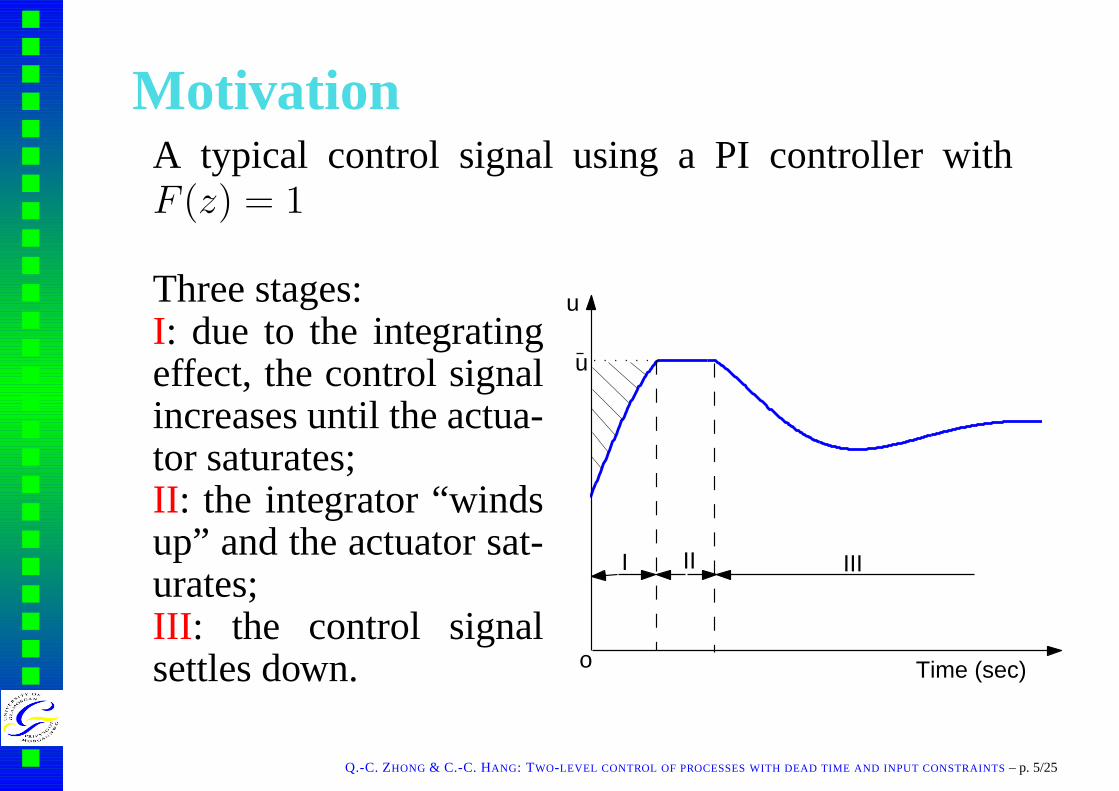
MotivationA typical control signal using a PI controller withF (z) = 1
Three stages:I: due to the integratingeffect, the control signalincreases until the actua-tor saturates;II : the integrator “windsup” and the actuator sat-urates;III : the control signalsettles down.
I II III
u
u
o Time (sec)
Q.-C. ZHONG & C.-C. HANG: TWO-LEVEL CONTROL OF PROCESSES WITH DEAD TIME AND INPUT CONSTRAINTS – p. 5/25

Why is the response slow?Stage I: The proportional gain cannot be too largeotherwise the actuator saturates very quickly.This means that the potential of the controller isoften not fully used to speed up the systemresponse; see the shaded area in the figure.
Stage II: The integrator windup requires the errorsignal to go opposite for a long period to drag theintegrator back to normal. This causes a largeovershoot and long settling time.
Stage III: The oscillation is not desirable either,which causes a long settling time.
=⇒The desired control signal
Q.-C. ZHONG & C.-C. HANG: TWO-LEVEL CONTROL OF PROCESSES WITH DEAD TIME AND INPUT CONSTRAINTS – p. 6/25

Two-level control signal
Time (sec) O
u
u
r/K
(n + 1)Ts lTs
The desired control signal when the set-point changeis the boundr of all step changes
Q.-C. ZHONG & C.-C. HANG: TWO-LEVEL CONTROL OF PROCESSES WITH DEAD TIME AND INPUT CONSTRAINTS – p. 7/25

Two-level control signal (cont’d)The signal can be expressed as:
1 − an+1z−n−1
K(1 − an+1)· r,
which gives the desired transfer func-tion from r to u:
T dur(z) =
1 − an+1z−n−1
K(1 − an+1).
Time (sec) O
u
u
r/K
(n + 1)Ts lTs
The first part should be under the saturation boundu:
r
K(1 − an+1)≤ u ⇒ n ≥
T
Tsln
Ku
Ku − r− 1.
Q.-C. ZHONG & C.-C. HANG: TWO-LEVEL CONTROL OF PROCESSES WITH DEAD TIME AND INPUT CONSTRAINTS – p. 8/25

Controller design
G(z) = K1 − a
z − az−l, C(z) =
(1 − az−1)N(z)
D(z)
l = τ/Ts is a positive integer anda = e−Ts/T . Theorder of polynomialsN(z) andD(z) in z−1 is n andm, respectively.
Tyr(z) = F (z)K(1 − a)N(z)z−(l+1)
D(z) + K(1 − a)N(z)z−(l+1)
Tur(z) = F (z)(1 − az−1)N(z)
D(z) + K(1 − a)N(z)z−(l+1).
Q.-C. ZHONG & C.-C. HANG: TWO-LEVEL CONTROL OF PROCESSES WITH DEAD TIME AND INPUT CONSTRAINTS – p. 9/25

Controller design: F (z)
Since the closed-loop system is stable,F (z) can besimply chosen to cancel the closed-loop poles.
F (z) =D(z)
K(1 − a)+ N(z)z−(l+1).
Then,Tyr(z) = N(z)z−(l+1)
Tur(z) = N(z)1 − az−1
K(1 − a).
The outputy is expected to start just after the deadtime,N(0) 6= 0. Hence,D(0) 6= 0.
Q.-C. ZHONG & C.-C. HANG: TWO-LEVEL CONTROL OF PROCESSES WITH DEAD TIME AND INPUT CONSTRAINTS – p. 10/25

Controller design: N(z)
The desired transfer function:
T dur(z) =
1 − an+1z−n−1
K(1 − an+1).
The actual transfer function:
Tur(z) = N(z)1 − az−1
K(1 − a).
⇓
N(z) =
∑ni=0 aiz−i
∑ni=0 ai
.
Q.-C. ZHONG & C.-C. HANG: TWO-LEVEL CONTROL OF PROCESSES WITH DEAD TIME AND INPUT CONSTRAINTS – p. 11/25

Controller design: D(z)
D(z) is designed to guarantee the stability of theclosed-loop system. One possibility is to choose
D(z) =1 − z−1
KIN(z)
to offer a PI controller:
C(z) =(1 − az−1)N(z)
D(z)= KI
1 − az−1
1 − z−1.
The corresponding open-loop transfer function is
L(z) = C(z)G(z) =KIK(1 − a)
(z − 1)zl.
Q.-C. ZHONG & C.-C. HANG: TWO-LEVEL CONTROL OF PROCESSES WITH DEAD TIME AND INPUT CONSTRAINTS – p. 12/25

A typical root-locus diagram
O
1 Re
Im
Q.-C. ZHONG & C.-C. HANG: TWO-LEVEL CONTROL OF PROCESSES WITH DEAD TIME AND INPUT CONSTRAINTS – p. 13/25
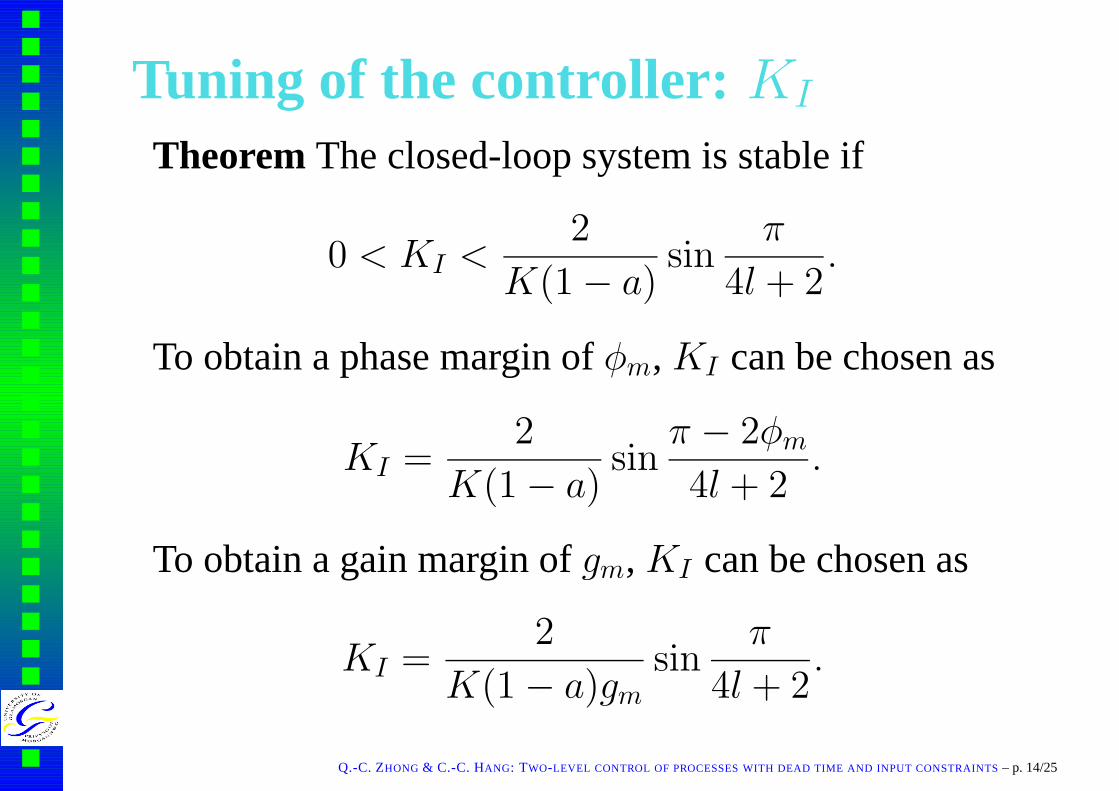
Tuning of the controller: KI
Theorem The closed-loop system is stable if
0 < KI <2
K(1 − a)sin
π
4l + 2.
To obtain a phase margin ofφm, KI can be chosen as
KI =2
K(1 − a)sin
π − 2φm
4l + 2.
To obtain a gain margin ofgm, KI can be chosen as
KI =2
K(1 − a)gmsin
π
4l + 2.
Q.-C. ZHONG & C.-C. HANG: TWO-LEVEL CONTROL OF PROCESSES WITH DEAD TIME AND INPUT CONSTRAINTS – p. 14/25
Some commentsthe settling time is approximately
(l + n + 1)Ts ≈ τ + T lnKu
Ku − r.
It is independent of the control parameterKI and the sampling period. It depends on the
saturation boundu and is hence an inherent property of the system. There is no way to
make the response any faster.
the static error is0 becauseN(1) = 1.
There is no braking control.
there is no need for such a brake because the response reachesthe steady state in
finite time and there is no overshoot;
the benefit of a large negative action is very small whenu is not very large, which
is the common case in practice,
the control strategy is more sensitive when there is a large negative control action.
Q.-C. ZHONG & C.-C. HANG: TWO-LEVEL CONTROL OF PROCESSES WITH DEAD TIME AND INPUT CONSTRAINTS – p. 15/25

An alternative implementation
G(s)ZOHFu(z)
Gm(z)
C(z) j
j j6
-
-
- - - - -?
�� ��
6
d(s)y(s)r(z)
ym
uuo
uc
−Ts
Fu(z) =1 − an+1z−n−1
K(1 − an+1), Gm(z) = K
1 − a
1 − az−1z−(l+1).
This structure appeared in [Wallén and Åström, 2002].
Q.-C. ZHONG & C.-C. HANG: TWO-LEVEL CONTROL OF PROCESSES WITH DEAD TIME AND INPUT CONSTRAINTS – p. 16/25

Advantages of this implementationThe control signalu is split into two parts:
u = uo + uc,
with the desired (open-loop) control signaluo and the contributionuc of the feedback
controllerC resulted from disturbances and model uncertainties.
There is strong connection with the input-shaping technique.
It is clearer that the desired control signal can be designedin an open-loop way if the
plant is stable. What’s extra is to inject this desired control signal into the modelGm of
the process and to obtain the error between the model outputym and the process outputy
for error feedback.
The feedback controllerC does not affect the shape of the control signal, which is not
explicit in the case discussed before (whereN(z) is a part of the controller). This means
that the controller may not be limited to a PI controller as designed above. In other words,
the proposed technique can be regarded as a “bolt-on” to any standard well-tuned PID
controllers.
The sampling periods for the feedforward controllerFu(z) and the feedback loop can be
different to give more freedom to the design of the feedback controller.Q.-C. ZHONG & C.-C. HANG: TWO-LEVEL CONTROL OF PROCESSES WITH DEAD TIME AND INPUT CONSTRAINTS – p. 17/25

Internal model controlIf C(z) is designed to be
C(z) =Fu(z)
1 − Gm(z)Fu(z),
then the system is actually the well-known IMC.
G(s)ZOHFu(z)
Gm(z)
m m m
C(z)
6
�
6
- - - - - - -?
��
d(s)
y(s)r(z) u
−
Ts
Q.-C. ZHONG & C.-C. HANG: TWO-LEVEL CONTROL OF PROCESSES WITH DEAD TIME AND INPUT CONSTRAINTS – p. 18/25

An example
G(s) =e−5s
s + 1
Ts = 0.25s ⇒ a = 0.7788, l = 20
u = 1.45, r = 1 ⇒ n ≥ 3.68
N(z) = 0.31+0.2414z−1 +0.1881z−2 +0.1464z−3 +0.1141z−4.
φm = 45◦ ⇒ KI = 0.173.
Q.-C. ZHONG & C.-C. HANG: TWO-LEVEL CONTROL OF PROCESSES WITH DEAD TIME AND INPUT CONSTRAINTS – p. 19/25

The converted set point r′
0r
Con
vert
ed s
et p
oint
Time (sec)
effect of D(z)
effect of N(z)
r’
mTs lTs
m = n + 1 = 5, l = 20, Ts = 0.25
Q.-C. ZHONG & C.-C. HANG: TWO-LEVEL CONTROL OF PROCESSES WITH DEAD TIME AND INPUT CONSTRAINTS – p. 20/25

The system response
0 1 2 3 4 5 6 7 8 9 10−1
0
1
2
3
4
5
6
7
8
9
e
Time (sec)
The error signale = r′ − y
0 1 2 3 4 5 6 7 8 9 100
0.2
0.4
0.6
0.8
1
1.2
1.4
1.6
Time (sec)
u
y
The output y and thecontrol signalu
Q.-C. ZHONG & C.-C. HANG: TWO-LEVEL CONTROL OF PROCESSES WITH DEAD TIME AND INPUT CONSTRAINTS – p. 21/25

Another example
G(s) =e−0.5s
s + 1
Q.-C. ZHONG & C.-C. HANG: TWO-LEVEL CONTROL OF PROCESSES WITH DEAD TIME AND INPUT CONSTRAINTS – p. 22/25

Comparative studies
(a) the system outputs (b) the control signals
Q.-C. ZHONG & C.-C. HANG: TWO-LEVEL CONTROL OF PROCESSES WITH DEAD TIME AND INPUT CONSTRAINTS – p. 23/25

Robustness
(a)T increased by20% (b) τ increased by20%
Q.-C. ZHONG & C.-C. HANG: TWO-LEVEL CONTROL OF PROCESSES WITH DEAD TIME AND INPUT CONSTRAINTS – p. 24/25

SummaryA controller is designed to obtain atwo-level controlsignal and adeadbeatset-point response. The con-troller is tuned to obtain the desired stability margin.
Time (sec) O
u
u
r/K
(n + 1)Ts lTs
Q.-C. ZHONG & C.-C. HANG: TWO-LEVEL CONTROL OF PROCESSES WITH DEAD TIME AND INPUT CONSTRAINTS – p. 25/25