traffic surveillance: a review of vision based … surveillance: a review of vision based vehicle...
TRANSCRIPT

International Journal of Applied Engineering Research ISSN 0973-4562 Volume 11, Number 1 (2016) pp 713-726
© Research India Publications. http://www.ripublication.com
713
Traffic Surveillance: A Review of Vision Based Vehicle Detection,
Recognition and Tracking
Ma'moun Al-Smadi
Faculty of Science and Technology,
Universiti Sains Islam Malaysia, Negeri Sembilan, Malaysia.
E-mail: Malaysia [email protected]
Khairi Abdulrahim Faculty of Science and Technology,
Universiti Sains Islam Malaysia, Negeri Sembilan, Malaysia.
E-mail: [email protected]
Rosalina Abdul Salam Faculty of Science and Technology Islamic Science Institute (ISI)
Universiti Sains Islam Malaysia, Negeri Sembilan, Malaysia. E-mail: [email protected]
Abstract
Video-based analysis of traffic surveillance is an active area
of research, which has a wide variety of applications in
intelligent transport systems (ITSs). In particular, urban
environments are more challenging than highways due to
camera placement, background clutter, and vehicle pose or
orientation variations. This paper provide a comprehensive
review of the state-of-the-art video processing techniques for vehicle detection, recognition and tracking with analytical
description. In this survey, we categorize vehicle detection
into motion and appearance based techniques, varying from
simple frame differencing and adaptive median filtering, to
more sophisticated probabilistic modeling and feature
extracting. We also discuss vehicle recognition and
classification utilizing vehicle attributes like color, license
plate, logo and type, provide a detailed description of the
advances in the field. Next we categorize tracking into model,
region and features based tracing. Finally tracking algorithms
including Kalman and particle filter are discussed in term of
correspondence matching, filtering, estimation and dynamical models.
Keywords: Computer Vision, Vehicle Detection, Vehicle
Tracking, Traffic Surveillance.
Introduction In recent years, there have been an extensive use of video
cameras for traffic surveillance systems, since it can be
considered as a rich source of information about traffic flow [1]. Moreover, the fast progress in computer vision,
computing and camera technologies, together with the
advancement on automatic video analysis and processing have
raise the interest in video-based traffic surveillance
applications [2].
The application of computer vision techniques in traffic
surveillance become increasingly important for intelligent
transportation system (ITS) [3]. These systems make use of
visual appearance in vehicle detection, recognition and
tracking that is useful for incident detection, behavior analysis
and understanding [2], [4]. Also, it provide traffic flow parameters that include vehicle class, count, trajectory etc.
Although, a significant research effort have been dedicated
to improve video-based traffic surveillance systems, various
challenges still facing practical ITS applications [5]. Typical
traffic scenes includes straight highways, urban road section,
intersections, turns and tunnels, which impose additional
challenges that include scale and pose variations, traffic
congestion, weather and lighting conditions [1]. On the other
hand, the variability in vehicle types, size color and pose
limits vehicle recognition and tracking to specific scenes [6].
Traffic congestion and camera placement affect performance,
since it raise the probability of occlusion [3]. Several computer vision techniques have been proposed in the
literature to address the aforementioned problems. However, a
universal method that can be applied to all types of vehicles
and environments does not exist in real world.
A recent survey [1] presented the state of the art vehicle
surveillance architecture from the prospective of hierarchal
and networked surveillance, with detailed discussion on
special computer vision issues. A survey on vehicle detection,
tracking and on-road behavior analysis can be found in [2]. A
review of computer vision techniques for urban traffic
analysis [3], which concentrate on infrastructure-side. In [4]
the key computer vision and pattern recognition have been reviewed with detailed description of technical challenges and
comparison of various solutions. Old review is found in [5].
This paper provide a comprehensive review of various
techniques involved in video-based traffic surveillance from
computer vision perspective. It include various techniques
used in vehicle detection, recognition and tracking. The
review also include improvements, modifications, highlight
the advantages and disadvantages.
The remainder of this paper is organized as follows. In the
next section we provide a review of the state of the art
research on vehicle detection. Section III reviews the literature about vehicle recognition and classification. In section IV,
vehicle tracking is analyzed. Detailed discussion is presented
in section V. Finally, section VI summarizes and conclude this
paper.
Vehicle Detection Vehicle detection form the first step in video based analysis
for different ITS applications [2]. Accuracy and robustness of
vehicle detection have a great importance in vehicle recognition, tracking, and higher level processing [3]. The
research effort in this field was divided into; motion based and
appearance based techniques [1]. Motion segmentation
techniques use the motion cues to distinguish moving vehicles
International Journal of Applied Engineering Research ISSN 0973-4562 Volume 11, Number 1 (2016) pp 713-726
© Research India Publications. http://www.ripublication.com
714
from stationary background. On the other hand, appearance
based techniques employ appearance features of the vehicle
like color, shape and texture to isolate the vehicle from the
surrounding background scene. This section will review
vehicle detection literature starting from simple frame
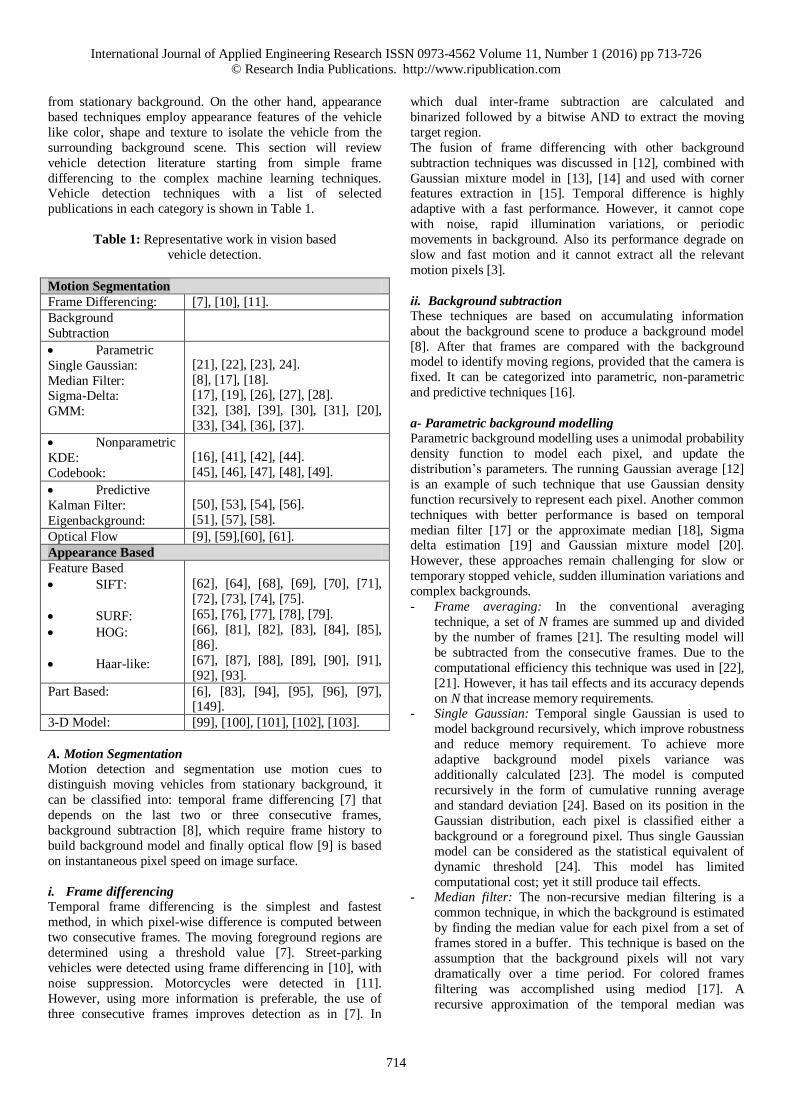
differencing to the complex machine learning techniques. Vehicle detection techniques with a list of selected
publications in each category is shown in Table 1.
Table 1: Representative work in vision based
vehicle detection.
Motion Segmentation
Frame Differencing: [7], [10], [11].
Background
Subtraction
Parametric
Single Gaussian:
Median Filter: Sigma-Delta:
GMM:
[21], [22], [23], 24].
[8], [17], [18]. [17], [19], [26], [27], [28].
[32], [38], [39], [30], [31], [20],
[33], [34], [36], [37].
Nonparametric
KDE:
Codebook:
[16], [41], [42], [44].
[45], [46], [47], [48], [49].
Predictive
Kalman Filter:
Eigenbackground:
[50], [53], [54], [56].
[51], [57], [58].
Optical Flow [9], [59],[60], [61].
Appearance Based
Feature Based
SIFT:
SURF:
HOG:
Haar-like:
[62], [64], [68], [69], [70], [71],
[72], [73], [74], [75].
[65], [76], [77], [78], [79].
[66], [81], [82], [83], [84], [85],
[86].
[67], [87], [88], [89], [90], [91],
[92], [93].
Part Based: [6], [83], [94], [95], [96], [97], [149].
3-D Model: [99], [100], [101], [102], [103].
A. Motion Segmentation
Motion detection and segmentation use motion cues to
distinguish moving vehicles from stationary background, it
can be classified into: temporal frame differencing [7] that
depends on the last two or three consecutive frames,
background subtraction [8], which require frame history to
build background model and finally optical flow [9] is based
on instantaneous pixel speed on image surface.
i. Frame differencing
Temporal frame differencing is the simplest and fastest
method, in which pixel-wise difference is computed between
two consecutive frames. The moving foreground regions are
determined using a threshold value [7]. Street-parking
vehicles were detected using frame differencing in [10], with
noise suppression. Motorcycles were detected in [11].
However, using more information is preferable, the use of
three consecutive frames improves detection as in [7]. In
which dual inter-frame subtraction are calculated and
binarized followed by a bitwise AND to extract the moving
target region.
The fusion of frame differencing with other background
subtraction techniques was discussed in [12], combined with
Gaussian mixture model in [13], [14] and used with corner features extraction in [15]. Temporal difference is highly
adaptive with a fast performance. However, it cannot cope
with noise, rapid illumination variations, or periodic
movements in background. Also its performance degrade on
slow and fast motion and it cannot extract all the relevant
motion pixels [3].
ii. Background subtraction
These techniques are based on accumulating information
about the background scene to produce a background model
[8]. After that frames are compared with the background model to identify moving regions, provided that the camera is
fixed. It can be categorized into parametric, non-parametric
and predictive techniques [16].
a- Parametric background modelling
Parametric background modelling uses a unimodal probability
density function to model each pixel, and update the
distribution’s parameters. The running Gaussian average [12]
is an example of such technique that use Gaussian density
function recursively to represent each pixel. Another common
techniques with better performance is based on temporal
median filter [17] or the approximate median [18], Sigma delta estimation [19] and Gaussian mixture model [20].
However, these approaches remain challenging for slow or
temporary stopped vehicle, sudden illumination variations and
complex backgrounds.
- Frame averaging: In the conventional averaging
technique, a set of N frames are summed up and divided
by the number of frames [21]. The resulting model will
be subtracted from the consecutive frames. Due to the
computational efficiency this technique was used in [22],
[21]. However, it has tail effects and its accuracy depends
on N that increase memory requirements. - Single Gaussian: Temporal single Gaussian is used to
model background recursively, which improve robustness
and reduce memory requirement. To achieve more
adaptive background model pixels variance was
additionally calculated [23]. The model is computed
recursively in the form of cumulative running average
and standard deviation [24]. Based on its position in the
Gaussian distribution, each pixel is classified either a
background or a foreground pixel. Thus single Gaussian
model can be considered as the statistical equivalent of
dynamic threshold [24]. This model has limited
computational cost; yet it still produce tail effects. - Median filter: The non-recursive median filtering is a
common technique, in which the background is estimated
by finding the median value for each pixel from a set of
frames stored in a buffer. This technique is based on the
assumption that the background pixels will not vary
dramatically over a time period. For colored frames
filtering was accomplished using mediod [17]. A
recursive approximation of the temporal median was

International Journal of Applied Engineering Research ISSN 0973-4562 Volume 11, Number 1 (2016) pp 713-726
© Research India Publications. http://www.ripublication.com
715
proposed in [18]. It estimate the median through a simple
recursive filter that increases or decreases by one if the
input pixel is greater or less than the estimate
respectively, it is not changed if it is equals.
In addition to the high computational complexity of the non-
recursive median filtering, its memory requirement is high. In contrast the major strengths of the approximate median filter
is its computational efficiency, robustness to noise, and
simplicity, moreover it can handle slow movements [8]. A
notable limitation is that it does not model the variance of
pixels.
- Sigma-delta: similar to the recursive median filter,
Manzanera and Richefeu used a simple recursive non-
linear operator based on sigma delta filter to estimate two
orders of temporal statistics (mean and variance) for
every pixel [19]. Thus, it can successfully adjust the
intensity of the background. Stability was improved in
[25] using selective update with relevance feedback through updating only background pixels.
Spatiotemporal processing proposed in [19], improves the
detection by removing non-significant pixels. The additional
processing improves detection, yet adaption to complex
scenes still an eventual problem. To overcome this problem,
multiple-frequency sigma–delta was introduced in [19].
Weighted sum of multiple models with different updating
periods was computed. Another multi-model was introduced
in [26], using a mixture of three distributions. Confidence
measurement was proposed in [25], and enhanced in [27].
They tied each pixel with a numerical confidence level that is inversely proportional to the updating period. In [28], a bi-
level sigma-delta filtering was proposed, which includes
conditional temporal and spatial updates. Selective and partial
updates using global variance in [29], make a good balance
between sensitivity and reliability at the expense of high
computation.
The main drawback of this technique is that it cannot handle
complex environments with multiple objects of variable
motion [27]. Moreover, it quickly degrades under slow or
congested traffic conditions [26]. Various improvement on
this technique came at the expense of memory requirement
and computational cost. - Gaussian mixture model: Gaussian mixture model
(GMM) was introduced by Chris stauffer and W.E.L
Grimson in 1999 [20]. It models each pixel as a mixture
of two or more Gaussians temporally with online
updated. These distributions are estimated as either a
stable background process or short-term foreground
process by evaluating its stability. If the pixel distribution
is stable above threshold, then it is classified as
background pixel.
The speed and adaption rate of the GMM was improved in
[30], [31] through extending the standard update equations. All of them use a fixed number of distributions. An improved
GMM model using recursive computation was presented in
[32], which update GMM parameters continuously. The
number of distributions was chosen adaptively on-line from a
Bayesian perspective. Self-adaptive GMM was proposed in
[33] for real-time background subtraction. In this technique a
description mixture was learnt to describe the first video
frame and used to initialize the new frames. To suppress
illumination variation, GMM was extended in [34] to the
spatial relations by modeling the joint color of each pixel pair.
Color and gradient information were employed to reduce the
foreground false detection rate in [35]. Shadows were
managed in [36]. In [37], GMM and motion energy image
were combined to introduce temporal information in foreground detection. It was combined with inter-frame
difference in [14]. GMM was used extensively for traffic
analysis [32], [38], [39] with various adaption to improve the
original technique.
GMM can handle multi-model background distribution, since
it maintains a density function for each [20]. Thus, it is
adaptive to light variations and repetitive clutter with higher
computational complexity [40]. Sudden variation in global
illumination affects the background model dramatically [39].
GMM parameters require carful tuning. Moreover, learning
rate affects sensitivity.
b- Non-parametric background modelling
These techniques use pixel history to build a probabilistic
representation of the observation using recent samples of
pixel’s values [16], without the need to consider pixel’s values
as a particular distribution. Kernel density estimation (KDE)
and codebook model are example of such techniques [41].
- Kernel Density Estimation (KDE): The nonparametric
KDE technique is used to characterize a multimodal
probability density function as proposed in [42]. In this
perspective, the probability of each background pixel is
estimated from many recent samples using a Parzen-window. Pixels that are unlikely to come from this
distribution based on a predefined threshold are labeled as
foreground.
The KDE background modeled in [41] utilized two
components for the optical flow and three components for the
intensity in normalized color space. In [13], they used KDE
technique over a joint domain-range representation of image
pixels, multimodal spatial uncertainties were directly
modelled. The bandwidth was chosen adaptively in [16], by
utilizing color and gradients as features for change detection.
A KDE technique was used in [43] to represent the spatial-
temporal background and a single Gaussian function to represent the spatial foreground.
KDE adapt quickly to changes in the background process and
detect targets with high sensitivity. However, due to memory
constraints it cannot be used for long-time background
sampling [16]. This technique overcomes the problem of fast
variations in background [44].
- Codebook model: Another nonparametric approach is
based on codebook model [45], in which a set of
dynamically handled codewords are used to replace
parameters represented by probabilistic function to model
each background pixel. After that quantization/clustering technique is required. Each codebook may contain a
variable number of codewords that models a cluster of
samples to construct a part of background [45]. The new
pixels are classified as background if its value is within
the range of any codeword otherwise it is classified as
foreground. Additional improvement to the algorithm
were presented; layered modeling/detection for model
maintenance and adaptive codebook updating for global

International Journal of Applied Engineering Research ISSN 0973-4562 Volume 11, Number 1 (2016) pp 713-726
© Research India Publications. http://www.ripublication.com
716
illumination variations. Pseudo layers along with a
codebook were used in [46], to represent different objects
in the background.
In [47], the proposed codebook employ diverse cues: pixel
texture, pixel color and region appearance. Conventional
codebook is used to cluster the texture information of the scene, and utilized to detect initial foreground regions.
Codebook-GMM Model was proposed in [48], the
background was constructed and maintained using codebook
technique, and the foreground were detected using the GMM
distribution whose parameters were calculated from the
codebook clusters. A modified codebook technique with
better performance was introduced and compared in [49].
c- Predictive background modelling
In these techniques predictive procedures are employed in
modeling the state dynamic of each pixel like Kalman filtering
[50] and eignspace reconstruction or eigenbackground [51]. Additional predictive techniques used Wiener filter or
autoregressive models, Wavelet transform that are based on
spatial information, Markov random field (MRF) and dynamic
conditional random field (DCRF) consider both temporal and
spatial information [27], [23], [21].
- kalman filter background modeling: The background
model can be estimated using Kalman filter [52], in
which one filter is used for temporally modeling each
pixel color. The foreground can be interpreted as noise
for the filter state. It was firstly introduced by Karmann
and von Brandt in [50]. In which, the internal state of the system is described by the background intensity and its
temporal derivative, which are updated recursively.
Several variations on kalman filter background modeling have
been proposed, differing mainly in the state spaces used. The
simplest version uses only the luminance intensity [53], others
used the intensity and its spatial derivatives [54]. However,
the illumination variations are non-Gaussian and violate
Kalman filters assumptions. The technique proposed in [55] is
able to deal with both gradual and sudden illumination
variations. Individual states of Kalman filter are adjusted
using an estimate of the illumination distribution over the
whole frame. In [56] pixel intensity was tracked using one-dimensional Kalman filter. Prediction/correction equations are
used to update the standard deviation and prior intensity
values.
- Eigenbackground: Based on an eigenvalue
decomposition, Oliver et al. proposed a background
modelling technique that perform offline learning and
online classification [51]. In the learning phase the
average of a set of sample frames is computed and
subtracted from all frames. Then the covariance matrix is
computed and the eigenvector matrix is composed from
the best eigenvectors. In the classification phase, each new frame is projected into the eigenspace. Then it is
back projected onto the image space to give the
background model.
In [57] a block-level eigenbackground was proposed, in which
the original frame was divided into blocks to perform
independent block training and subtraction. The algorithm
was extended in [58] to select the best eigenbackground for
each pixel. The modification include selective training, model
initialization, and pixel-level reconstruction.
iii. Optical flow
Optical-flow-based motion segmentation use flow vectors
characteristics of moving objects over time to detect moving
regions in video. It is the instantaneous pixel speed on the image surface that corresponds to object motion in 3-D space.
The generated field represent the velocity and direction of
each pixel or sub-pixel as a motion vector [9].There are many
methods for computing optical flow among which few are
partial differential equation based methods, gradient
consistency based methods and least squared methods.
Merged vehicle blobs was separated in [59] using dense
optical flow. Optical flow and 3-D wireframes have been used
to segment vehicles in [60]. In [9], it was used to deal with
vehicle scale variations and color similarity, and in [61] for
vehicle detection and speed estimation. This technique is less susceptible to occlusion. It provide an
accurate subpixel motion vectors that is best suited in
presence of camera motion, light variation and complex or
noisy background. However, iterative calculation increase its
computational complexity.
B. Appearance Based Techniques
The use of visual information like color, texture and shape in
detecting vehicles require prior information [62]. Feature
extraction is used to compare the extracted 2-D image features
with the true 3-D features in the real world. In contrast to motion segmentation techniques that detect motion only,
appearance based techniques detect stationary objects in
images or videos [1].
i. Feature Based Techniques
Representative features use coded descriptions to characterize
the visual appearance of the vehicles. A variety of features
have been used in vehicle detection such as local symmetry
edge operators [63]. It is sensitive to size and illumination
variations, thus a more spatial invariance edge based
histogram was used in [64]. In recent years, these simple features evolves into more general and robust features that
allow direct detection and classification of vehicles. Scale
Invariant Feature Transformation (SIFT) [62], speeded up
Robust Features (SURF) [65], Histogram of Oriented
Gradient (HOG) [66] and Haar-like features [67] are
extensively used in vehicle detection literature.
- SIFT: Scale Invariant Feature Transformation (SIFT) was
first introduced in 1999 [62]. Features are detected
through a staged filtering approach, which identifies local
edge orientation around stable keypoints in scale space.
The generated features are invariant to image scaling,
translation, and rotation, also it is partially invariant to illumination changes and affine or 3D projection. Thus, it
can describe the appearance of salient points uniquely. In
addition to the feature vector, the characteristics scale and
orientation of every keyponit is calculated. It can be used
to find correspondence of object points in different
frames [62].
A modified SIFT descriptor was used in [64], by introducing a
rich representation for vehicle classes. In [68], SIFT interest
points were re-identified as the initial particles to improve

International Journal of Applied Engineering Research ISSN 0973-4562 Volume 11, Number 1 (2016) pp 713-726
© Research India Publications. http://www.ripublication.com
717
tracking performance. SIFT-based template matching
technique was used in [69], to locate special marks in the
license plate. SIFT and Implicit Shape Model (ISM) were
combined in [70] to detect a set of keypoints and generate
feature descriptors. In [71] an SIFT based mean shift
algorithm was proposed. To compress the length of SIFT, Principal Component Analysis (PCA)–SIFT was introduced in
[72], through combining local features with global edge
features using an adaptive boost classifier. However, it was
slow and less distinctive [65]. Based on an enhanced SIFT
feature-matching technique vehicle logo recognition algorithm
was proposed in [73]. The SIFT matching algorithm was
combined with SVM in [74], for multi-vehicle recognition and
tracking. It perform tracking well in complex situations. Still,
it consumes a lot of time, which restricts practical
applications. The proposed method in [75], combined the
advantages of SIFT and CAMSHIFT to track vehicle.
Due to its distinctive representation, SIFT has wide applications. However, the high dimensionality and the use of
Gaussian derivatives to extract feature points are time-
consuming and do not satisfy the real-time requirement [76].
Its low adaption to illumination variation is another drawback.
- SURF: Speeded Up Robust Features (SURF) is a scale
and rotation invariant interest point detector and
descriptor that was introduced in [65]. Compared to SIFT
its computational complexity was reduced by replacing
Gaussian filter with a box of filters, which slightly affects
the performance. SURF algorithm uses a Hessian matrix
approximation on an integral image to locate the points of interest. The second-order partial derivatives of an image
describe its local curvatures [77].
In [76], symmetrical SURF descriptor was proposed for
vehicle detection with make and model recognition. Recently,
symmetrical SURF was used in [77] for vehicle color
recognition and in [78] to detect the central line of the
vehicles. The proposed technique can process one vehicle per
frame with 21 fps. A GPU based multiple camera system in
[79] used Gabor filter as a directional filter with SURF
matching for unique representation of vehicles. An on road
vehicle detection in [80], uses cascade classifier and Gentle
AdaBoost classifier with Haar-SURF mixed features. Because of its repeatability, distinctiveness, robustness and
real-time capability, it has become one of the most commonly
used features in computer vision [76]. Nevertheless, it is not
stable under rotation and illumination variations.
- HOG: The grid of Histogram of Oriented Gradient
(HOG) [66] compute the image gradient directional
histogram, which is an integrated presentation of gradient
and edge information. It was originally proposed to detect
pedestrian, then in [81], it was introduced for vehicle
detection by using 3-D model surface instead of 2-D grid
of cell to generate 3-D histogram of oriented gradient (3-DHOG).
HOG symmetry feature vectors was proposed in [82] and used
together with the original HOG in hypothesis verification. A
combination of a latent support vector machine (LSVM) and
HOG was used in [83] to combines both local and global
features of the vehicle as a deformable object model. HOG
was combined with Disparity Maps in [84] to detect Airborne
Vehicle in Dense Urban Areas. In [85] a relative
discriminative extension to HOG (RDHOG) was proposed to
enhance the descriptive ability.
Illumination and geometric invariance together with the high
computational efficiency are the main advantages of this
feature, which outperform sparse representation in SIFT [86].
- Haar-like Features: Haar-like features [67] are formed of sum and differences of rectangles over an image patch to
describe the grey-level distribution of adjacent regions.
The filters used to extract the features consists of two
three or four that can be at any position and scale. The
output of the filter is calculated by adding the pixel values
for the grey region and white region separately, then the
difference between the two sums is normalized. It
represents horizontal or vertical intensity difference,
intensity difference between the middle region and aside
areas, diagonal intensity differences and the difference
between the center and surrounding areas.
Haar features was used in [87] to detect vehicles and in
[88],[89] it was employed to train a cascaded Adaboost
classifier. Haar-like and motion features were used to detect
highway vehicles in [90], and on urban in [91]. In addition to
Haar-like features, local binary pattern (LBP) feature were
used in [92] to train the boosting classifiers for the detection
of vehicle license plate. Vehicle detection with multiple layer
perceptron’s (MLP) ensemble was implemented using Haar-
like features in [93].
In addition to the high computation efficiency, Haar-like
features are sensitive to vertical, horizontal and symmetric
structure, which make them well suited for real time
application. Moreover, it require a relatively limited training
data [80].
ii. Part based detection models
In this technique the vehicle is divided into a number of parts
modeled by the spatial relation between them [63]. Many
recent studies employ this technique in vehicle recognition
[6]. They consider the vehicle to be separated into front, side
and rear parts which contains window, roof, wheels, and other
parts [6]. The distinct parts are detected based on their
appearance, edge and shape feature [94]. After that spatial
relationship, motion cue and multiple models are used to
identify vehicles.
In [95] part labelling was defined to cover the object densely.
To ensure consistent layout of parts while allowing
deformation they used Layout Consistent Random Field
model. The method was expanded to 3-D models in [96] to
learn physically localized part appearances. Also they
combine object-level descriptions with pixel-level appearance,
boundary, and occlusion reasoning. Deformable part based
modelling was employed in [83] through the combination of a
latent support vector machine (LSVM) and histograms of
oriented gradients (HOGs). The algorithm combines vehicle
global and local features as a deformable model composed of
root filter and five parts filters to detect front, back, side, and

International Journal of Applied Engineering Research ISSN 0973-4562 Volume 11, Number 1 (2016) pp 713-726
© Research India Publications. http://www.ripublication.com
718
front, back truncated.
Deformable part based model was used in [83], it consists of a
global “root” filter, six part filters and a spatial model to
detect and track vehicles on road using part-based transfer
learning (PBTL). Vehicle detection by independent parts
(VDIP) was introduced in [97] for urban driver assistance.
Front, side, and rear parts were trained indecently using active
learning. Part matching classification using a semisupervised
approach form vehicles sideview from independently detected
parts.A rear view vehicle detection was considered in [6]
based on multiple salient parts that includes license plate and
rear lamps. For part localization distinctive color, texture and
region features were used. Then Markov random field model
was used to construct probabilistic graph of the detected parts.
Vehicle detection was accomplished by inferring the marginal
posterior of each part using loopy belief propagation.
iii. Three Dimensional modeling
In this technique, vehicle detection can be achieved through
the use of computer generated 3-D models with appearance
matching. The use of 3D models for vehicle detection and
classification was proposed in [98].
The classification of vehicles into 8 classes in [99] relies on a
set of three dimensional models, each one providing a coarse
description of various vehicle shapes. In [100] a fixed size 3D
rectangular box was adopted to reduce the computation at the
expense of matching accuracy. Vehicle detection using 3D
models was proposed in [101] and used in [102] for urban
vehicle tracking. Motion silhouettes were extracted and
compared with a projected model silhouette to identify the
ground plane position of vehicle. Based on edge-element and
optical-flow association a 3D model was used in [60] for
automatic initialization. A deformable 3D model was
proposed in [103] that deforms to match various passenger
vehicles.
The main drawback of 3-D modelling is how to achieve an
accurate 3-D model, which make it limited to few number of
vehicle class. Moreover the representation, extraction and
matching complicate as the number of models increase.
Vehicle Recognition and Classification
Detected foreground regions may correspond to different
objects in natural scenes. For instance, the scene may include
vehicles of different types and classes, humans, and other
moving objects such as animals, motorcycles, etc. thus it is
necessary to isolate, distinguish and recognize the object of
interest (i.e. vehicle).
Vehicle recognition aims at identifying correspondence
between real-world and its projection in two dimensional
image space. Which may involves extracting vehicle static
attributes that includes color, license plate, logo and type as
shown in Table 2. Feature extraction, representation and
matching are the main challenges. Vehicle representation is
based on visual cues such as edges, boundaries, junctions,
brightness or color [64].
Table 2: Vehicle Recognition and Classification.
Color RGB:
HSV:
Hasegawa, et al., [120]
Baek, et al., [106]
License
Plate
Texture:
Color:
Features:
Anagnostopoulos, et al.,
[110]
Wan, [109]
Chen, et al., [111]
Logo Edge: Features:
Wang, et al., [117] Psyllos, et al., [73]
Type Shape:
Appearance:
Negri, et al., [121]
Chen, et al., [122]
Thakoor, et al., [123].
Huang, et al., [126]
Feris, et al., [127]
Zhang, [128]
A. Color Recognition
Color of vehicle is an essential attribute that have wide
applications in ITS, such as security and crime prevention
issues. The variation in illumination and camera view point in
outdoor scene affects the color classification dramatically
[104]. In [105] k nearest neighbor like classifier was used to
classify vehicle color into six groups, each of them contains
similar colors like black, dark blue and dark gray. HSV color
space was used in [106]. They classify vehicle color into red,
blue, black, white and yellow using 2-D histogram of H and S
channels together with SVM. Multiple classification methods (K-NN, ANNs and SVM) along with two region of interest
were used in [107] to recognize vehicle color in a 16 color
space. In [108] bag of word technique was used to select
region of interest for color recognition.
B. License Plate Recognition
Automatic recognition of license plate number is generally
performed in three major steps: license plate localization,
plate character segmentation and recognition. Accurate
localization of license plate require the use of edge, color
[109], texture [110] or features combination [111]. Character segmentation varies according to the issuing country due to
variation in color, size and aspect ratio [112]. While character
recognition is affected by the camera zoom factor and require
the use of a single classifier such as Artificial Neural Network
(ANN) [113], Hidden Markov Model (HMM) [114] or
Support Vector Machine (SVM) [115]. Some research use
multistage or parallel classifiers [116].
C. Logo Recognition
Vehicle logo provide important information about vehicle
make and model, thus it plays a major role in vehicle classification and identification. Logo detection is a critical
prerequisite step for logo recognition. Some techniques used
edge detection and morphological filtering as in [117], or
using coarse to fine vehicle logo localization step [118].
Others detect the frontal vehicle logo using license plate

International Journal of Applied Engineering Research ISSN 0973-4562 Volume 11, Number 1 (2016) pp 713-726
© Research India Publications. http://www.ripublication.com
719
detection module and SIFT descriptor in [73], it was time
consuming with 91% recognition rate. Neural network [119]
and template matching was also used for logo recognition.
D. Vehicle Type Classification
Vehicle type classification gain a great deal of research interest recently. It follow two major directions either based
on the shape or the appearance of the vehicle. Shape features
that are used to classify vehicle types include: size, silhouette
dimension, aspect ratio etc. The number of vehicle classes
varies according to the used features and the classification
technique. The curves associated with the 3D ridges of vehicle
surface were used in [120] with 88% accurate rate, they
classify vehicles into SUV, car and minibus. Oriented-contour
point model was proposed in [121] to represent vehicle type.
The edges in the four vehicle orientation from the front view
were used together with a voting algorithm and Euclidean edge distance with classification rate of 93.1%. 3D model
based classification were used in [122] for car, van, bus and
motorcycle classification with accuracy of 96.1 and 94.7
respectively. Structural Signatures feature that captures the
relative orientation of vehicle surfaces and the road Surface
was used in [123] to classify passenger vehicles into sedans,
pickups, and minivans/sport utility vehicles in highway videos
with limited accuracy below 90%.
Appearance based classification techniques use appearance
features like edge, gradient and corner. It can distinguish
between a wide variety of vehicle type with different time
complexity and accuracy depending on the selected features and classifier. Edge features was also used with K-means
classifier to distinguish between 5 vehicle classes in [124]. A
2-D linear discriminant analysis technique was proposed in
[125] to classify 25 vehicle types with 91% accuracy. High
recognition accuracy of 94.7% was obtained for 20 vehicle
types in [126]. Simple blob measurements was used in [136]
to classify eight different vehicle types using VECTOR
system with accuracy over 80%. Multiple feature plan that
contains RGB colors, gradient magnitude and other features
were used in [127] to train a single detector for multiple
vehicle types (buses, trucks and cars). They introduce the term shape free appearance space to denote the image space of the
vehicle. Another high recognition accuracy of 98.7% for 21
vehicle types was obtained in [128].
Many challenging issues still exist in vehicle recognition and
classification. That include: illumination variations, road
environment, camera field view, similarity in vehicle
appearance and the large number of vehicle types.
Vehicle Tracking Afar detection and recognition of vehicle, tracking aims to
obtain vehicle trajectory through identifying motion dynamic
attributes and characteristics to locate its position in every
frame [1]. Vehicles tracking can be merged with the detection
process or performed separately. In the first case detected
vehicles and correspondence are jointly estimated by updating
location iteratively using information obtained from previous
frames. In the latter case, vehicle detection is performed in
every frame, and data association is used to provide
correspondence between vehicles in consecutive frames [3].
Current trends in vehicle tracking can be classified into three
categories: model-based (multi-view or deformable), region-
based (shape or contour), and feature-based tracking as shown
in Figure 2 with a list of selected publications in each category
presented in Table 3.
Table 3: Representative work in vehicle tracking categories.
Model-Based Tracking
Multi-view Model Buch, et al., [40] Koller et al.,[54]
Lou, et al., [129]
Deformable Template J. Ferryman, et al., [98]
Tan, & Baker, [131]
Z. Zhang, et al., [132]
Y.-L. Lin, et al., [133]
Region Based Tracking
Shape Based Mandellos, et al., [134]
Lai, et al., [135]
Contour-Based Zhang, et al., [38] Meier, et al., [138]
Feature-Based Tracking
Buch, et al., [81]
Bouttefroy, et al., [140]
A. Model-Based Tracking
Model-based tracking use prior knowledge to create a
geometric model for the target of interest (i.e. vehicle), which
can be 2-D or 3-D appearance model. These models are used
to match with moving regions and describe vehicle motion
[60]. This accurate and robust technique costs high
computation, since exact model is difficult to obtain. Different
methods were proposed to model vehicles, which can be
categorized into multi-view model and deformable template
[60], [129], [130].
Multiview 3-D model is constructed using 2-D geometrical
features. In [54], vehicle 3-D model was built using edges and
correspondence features. The technique proposed in [129]
evaluate the distance between extracted edge points and the
projected model. The similarity of the projected 2-D contour
was evaluated in [40] to extract the 3-D vehicle pose.
On the other hand the 3-D template model is projected into
image through evaluating image intensity or gradient.
Deformable vehicle model with 29 parameters was combined
with principle component analysis in [98] for vehicle tracking.
Gradient vectors and intensity values were used in [131] to
estimate and track vehicle pose and orientation. A dynamin 3-
D vehicle model was proposed in [132] for deformable model
based tracking. Vehicle tracking was achieved using complex
deformable 3-D model in [103], and 3-D deformable model
fitting with weighted Jacobian in [133]. In [83] deformable
object model was combined with particle filter to improve
likelihood estimation for on-road multi-vehicle tracking. 3-D
model-based vehicle localization was used for constrained
multiple-kernel tracking in [130].
Multiview based techniques are sensitive to noise and
occlusion, while Deformable template based techniques focus
on shape fitting and discard color information. In addition
both techniques are time consuming.

International Journal of Applied Engineering Research ISSN 0973-4562 Volume 11, Number 1 (2016) pp 713-726
© Research India Publications. http://www.ripublication.com
720
B. Region Based Tracking
Tracking based on region detects vehicles silhouette as
connected regions within rectangular, oval or any simple
geometric shape, which can be characterized by area,
coordinates, centroids, edges, contour or intensity histogram
etc. Data association between region characteristics within consecutive frame is used to perform tracking. Region based
tracking search for the vehicle using shape matching or it
evolve an initial contour to its new position using contour
tracking. Contour representation use a closed curve that is
updated automatically [1].
In [134] shape based tracking with Kalman filtering were used
to match simple region. In [135] graph-based region tracking
was used for highway vehicles by finding the maximal weight
graph. The computational complexity and its failure in
crowded situation are the main drawbacks of this technique.
In [40] length and height of the convex hull were used to track vehicle.
Vehicle centroid and velocity were used in Kalman filtering
framework in [136]. In [137] vehicle appearance was modeled
using hue-saturation color histogram with Markov Chain
Monte-Carlo Particle Filters tracking paradigm. In [54] the
contour that represent the moving vehicles were detected and
tracked using snakes. Vehicle position was defined by the
center of the snake convex contour with linear motion pattern.
In [38] the contour of two vehicles was used to resolve
occlusion. Vehicle-contour-tracking method was used in [138]
to handle visual clutter and partial occlusions.
C. Feature-based Tracking
The detected vehicle features are used to perform matching in
consecutive frames. Thus, vehicle features are tracked in a
transformed space instead of pixels space. Earlier techniques
used corners and edges to represent vehicles [139]. Motion
constrains are used to group vehicle sub-features together.
Several techniques propose the combination of corners, edges
or interest points with feature descriptors like SIFT [71],
SURF [79], HOG [81],[85] and Haar-like [87] for vehicle
tracking. Other techniques perform tracking based on color
histogram, which is more robust to noise and invariant to vehicle rotation and translation [140].
The concept of HOG was extended to 3D (3-DHOG) in [81],
which uses 3D model surfaces rather than 2D grids of cells.
This technique allows to resolve the scale variation and use a
single model for variable viewpoints of road users. Region-
based tracking was combined with Scale Invariant Feature
Transform (SIFT) features based tracking in [75]. Feature-
based technique can perform well in relatively crowded
circumstances. But the main challenge in this technique is to
choose appropriate set of features which can effectively
represent the moving object (i.e. vehicle). Feature-based tracking perform well in relatively crowded
circumstances. But the main drawback of this technique is to
choose appropriate features which can effectively represent
the moving vehicle.
D. Tracking Algorithms
All tracking techniques require prediction and data association
process that can be performed using tracking algorithms that
include Kalman filter and Particle filter [87].
i. Kalman filter tracking
In vehicle tracking Kalman filtering is used to estimate the
object position in the new frame [52], assuming that the
dynamics of the moving object can be modeled and that the
noise effect is stationary with zero mean. The current states of
the Kalman filter are estimated recursively using the previously estimated states and current measurements. The
state vector contains the variables of interest, which represent
the state of the dynamic system. It can be position, velocity,
orientation angles, etc. In the case of the moving vehicles, it
has two degrees of freedom, the position and the velocity.
In [54] Koller et. al., propose the application of Kalman filter
concept in contour vehicle tracking. Extended Kalman-
filtering was used in [129] to track the 3-D vehicle model,
which improves accuracy and stability. Projective Kalman
filter was combined with mean-shift algorithm in [140] to
perform vehicle tracking. They integrate the non-linear projection of the vehicle trajectory in its observation function
to provide accurate estimation of vehicle position. Variable
sample rate Kalman filter proposed in [102] track 3D model
vehicle on the ground plane. Kalman filter was used in [141]
to predict the possible location of the vehicle, then accurate
estimation was achieved by predicted point matching using
Gabor wavelet features. In [134] Kalman filter was used to
track vehicle shape based on its location, speed and length.
Sivaraman &Trivedi used Kalman filtering in [97] to integrate
tracking of vehicle parts in the image plane. Position and
dimension of the target are used with the constant velocity
model. In [14] Kalman filtering was adopted using vehicle coordinates and unit displacement of center of mass together
with the dimensions and unit displacement of tracking region.
Detection by tracking technique was used in [6], they estimate
vehicles trajectories by Kalman filter. The state vector was
defined by the license plate center and the vehicle speed.
ii. Particle filter tracking
The particle filtering technique has many applications in
visual tracking. It is a sequential Monte Carlo sampling
technique that estimates the latent state variables of a
dynamical system based on a sequence of observations [142]. Basically, particle filter uses a set of random samples with
associated weights and estimation to represent the posterior
probability density. When the number of particles is large
enough, the group of particles with associated weight can
completely describe a posteriori probability distribution to
give optimal Bayesian estimation of particle filter.
Vehicle contour tracking in [138] is based on particle filter
condensation algorithm. In [140] particle filter was used to
track the color histogram of the vehicle. A hybrid mean-shift
(MS) and particle-filtering approach was developed in [143],
which aims to deal with partial occlusions and the background clutter. Color histogram and edge-based shape features were
combined in [144], the particle filter performs well, even with
significant color variations, poor lighting, and/or background
clutter edges. Another approach that use 3-D scene
information in vehicle tracking is based on the Lucas–Kanade
tracker algorithm [21].
The work in [145] employed particle filter method in
Bayesian estimation for vehicle tracking in urban
environments, and they claim that it performs better than EKF
International Journal of Applied Engineering Research ISSN 0973-4562 Volume 11, Number 1 (2016) pp 713-726
© Research India Publications. http://www.ripublication.com
721
in multimodal distributions. The center of the rectangle that
encloses the vehicle was used in [146] to initialize the particle
filter algorithm, with zero weight assigned to particles that fall
outside of the rectangle area. Vehicle tracking in [147] fuse
several cues in particle filter, which include color, edge,
texture and motion constrained, which provide accurate tracking.
The tracking technique in [148] is based on spatial and
temporal coherence of particles. Particles are grouped
according to their spatial positions and motion vectors.
Vehicle tracking in [37] uses the similarity between color
histogram to identify vehicle particle. Markov Chain Monte-
Carlo Particle Filters was used in [137] for real time tracking.
In [85], RDHOG was integrated with particle filter framework
(RDHOGPF) to improve the tracking robustness and
accuracy.
Discussion This section will provide a discussion, analyses and
perspectives of challenges and future research directions on
video-based traffic surveillance. Most of the work achieved
so far deal with highway rather than urban environments. The
main technical challenge from the application perspective lies
in the camera view and operating condition, which impose many additional limitations [3]. Vehicle surveillance systems
undergo various difficulties especially in urban traffic
scenarios such as road sections and intersection in which
dense traffic, vehicle occlusion, pose and orientation variation
and camera placement highly affect their performance.
In road sections vehicles usually travels in a uni-direction in
which heavy traffic and congestion may affect vehicle
detection due to slow or temporary stopped vehicles. Vehicle
pose and orientation with respect to the camera often varies
while moving within intersections due to lane change and turn
left, right and round [130]. This will vary the appearance and
scale of vehicle within consecutive frames affecting tracking and classification dramatically. On the other hand different
vehicle types varies in size shape and color. All of that will
increase the complexity of recognition and tracking process
and affect the real time performance. Nighttime is a dramatic
challenge for traffic surveillance, in which headlight and
taillights are used to represent the vehicle [149].
Despite the significant progress that have been made in
vehicle surveillance during the last years, many challenging
issues still need further research and development especially
in urban environment, in which vehicle pose and orientation
varies dramatically at road turns and intersections .
Conclusion In this paper, we have provided an extensive review of the
state-of-the-arte literature addressing computer vision
techniques used in video based traffic surveillance and
monitoring systems. These systems perform three major
operations that is vehicle detection, tracking and recognition.
Vehicle detection was divided into two main categories based
on vehicle representation, namely, techniques based on motion cues and techniques that employ appearance features.
Both techniques can be used to isolate vehicles from the
background scene with different computational complexity
and detection accuracy. We provide detailed summaries on
vehicle color, license plate and logo recognition together with
vehicle shape and appearance type classification. Vehicle
tracking was categorize into model, region and feature based
tracking with a discussion on motion and parameter
estimation schemes employed like Kalman and Particle
filtering. We believe that, this paper provides a rich bibliography content regarding vehicles surveillance systems,
which can provide valuable insight into this important
research area and encourage new research.
Acknowledgments This paper presents a work that is supported by the ministry of
higher education (MOHE), under the Research Acculturation
Grant Scheme (RAGS/2013/USIM/ICT07/2) and Science
Fund Grant Scheme (USIM/SF/FST/30/30113).
References [1] B. Tian, B.T. Morris, M. Tang, Y. Liu, Y. Yao, C. Gou,
D. Shen, and S. Tang, “Hierarchical and networked
vehicle surveillance in ITS: A survey,” IEEE Transactions on Intelligent Transportation Systems, vol.
16, no. 2, pp. 557-580, 2015.
[2] S. Sivaraman, and M.M. Trivedi, “Looking at vehicles on the road: A survey of vision-based vehicle detection,
tracking, and behavior analysis,” IEEE Transactions on Intelligent Transportation Systems, vol. 14, no. 4, pp.
1773-1795, 2013. [3] N. Buch, S. Velastin, and J. Orwell, “A review of
computer vision techniques for the analysis of urban traffic,” IEEE Transactions on Intelligent Transportation
Systems, vol. 12, no. 3, pp. 920-939, 2011. [4] X. Wang, “Intelligent multicamera video surveillance: A
review,” Pattern recognition letters, vol. 34, no. 1, pp. 3-19, 2013.
[5] V. Kastrinaki, M. Zervakis, and K. Kalaitzakis, “A survey of video processing techniques for traffic applications,”
Image and vision computing, vol. 21, no. 4, pp. 359-381, 2003.
[6] B. Tian, Y. Li, B. Li, and D. Wen, “Rear-view vehicle detection and tracking by combining multiple parts for
complex urban surveillance,” IEEE Transactions on Intelligent Transportation Systems, vol. 15, no. 2, pp.
597-606, 2014. [7] Q.L. Li, and J.F. He, “Vehicles detection based on three-
frame-difference method and cross-entropy threshold method,” Computer Engineering, vol. 37, no. 4, pp. 172-
174, 2011. [8] R. Manikandan, and R. Ramakrishnan, “Video object
extraction by using background subtraction techniques for sports applications,” Digital Image Processing, vol. 5, no.
9, pp. 435-440, 2013. [9] Y. Liu, Y. Lu, Q. Shi, and J. Ding, “Optical flow based
urban road vehicle tracking,” in proc. IEEE 9th
International Conference Computational Intelligence and Security (CIS), Dec. 2013, pp. 391-395.
[10] K. Park, D. Lee, and Y. Park, “Video-based detection of street parking violation”, in Proc. International
Conference on Image Processing, Computer Vision, and Pattern Recognition(IPCV), 2007, pp. 152-156.
[11] P.V. Nguyen, and H.B. Le, “A multi-modal particle filter

International Journal of Applied Engineering Research ISSN 0973-4562 Volume 11, Number 1 (2016) pp 713-726
© Research India Publications. http://www.ripublication.com
722
based motorcycle tracking system”, In PRICAI 2008:
Trends in Artificial Intelligence, 2008, pp. 819-828. Springer Berlin Heidelberg.
[12] L. Xu, and W. Bu, “Traffic flow detection method based on fusion of frames differencing and background
differencing,” in proc. IEEE 2ed International Conference on Mechanic Automation and Control
Engineering (MACE), July, 2011, pp. 1847-1850. [13] H. Zhang, and K. Wu, “A vehicle detection algorithm
based on three-frame differencing and background subtraction,” in proc. IEEE 5th International Symposium
on Computational Intelligence and Design (ISCID), Oct. 2012, vol. 1, pp. 148-151.
[14] R. Zhang, P. Ge, X. Zhou, T. Jiang, and R. Wang, “An method for vehicle-flow detection and tracking in real-
time based on Gaussian mixture distribution,” Advances in Mechanical Engineering, vol. 5, p. 861321, 2013.
[15] L. Xie, G. Zhu, M. Tang, H. Xu, and Z. Zhang, “Vehicles tracking based on corner feature in video-based ITS,” in
proc. IEEE 6th International Conference on Telecommunications (ITS), Jun. 2006, pp. 163-166.
[16] Q. Wan, and Y. Wang, “Background subtraction based on adaptive non-parametric model,” in proc. 7th IEEE
World Congress on Intelligent Control and Automation (WCICA), Jun. 2008, pp. 5960-5965.
[17] R. Cucchiara, C. Grana, M. Piccardi, and A. Prati, “Detecting moving objects, ghosts, and shadows in video
streams,” IEEE Transactions on Pattern Analysis and Machine Intelligence, vol. 25, no. 10, pp. 1337-1342,
2003.
[18] N.J. McFarlane, and C.P. Schofield, “Segmentation and tracking of piglets in images,” Machine vision and
applications, vol. 8, no. 3, pp. 187-193, 1995. [19] A. Manzanera, and J.C. Richefeu, “A new motion
detection algorithm based on Σ–Δ background estimation,” Pattern Recognition Letters, vol. 28, no. 3,
pp. 320-328, 2007. [20] C. Stauffer, and W.E.L. Grimson, “Adaptive background
mixture models for real-time tracking,” IEEE Computer Society Conference on Computer Vision and Pattern
Recognition, vol. 2, 1999. [21] N.K. Kanhere, and S.T. Birchfield, “Real-time
incremental segmentation and tracking of vehicles at low camera angles using stable features,” IEEE Transactions
on Intelligent Transportation Systems, vol. 9, no. 1, pp. 148-160, 2008.
[22] X. Chen, and C. Zhang, “Vehicle classification from traffic surveillance videos at a finer granularity,”
Advances in Multimedia Modeling, pp. 772-781, 2006. Springer Berlin Heidelberg.
[23] C.R. Wren, A. Azarbayejani, T. Darrell, and A.P. Pentland, “Pfinder: Real-time tracking of the human
body,” IEEE Transactions on Pattern Analysis and Machine Intelligence, vol. 19, no. 7, pp. 780-785, 1997.
[24] B. Morris, and M. Trivedi, “Improved vehicle classification in long traffic video by cooperating tracker
and classifier modules,” IEEE International Conference on Video and Signal Based Surveillance (AVSS), Nov.
2006, pp. 9-9.
[25] S. Toral, M. Vargas, F. Barrero, and M.G. Ortega, “Improved sigma–delta background estimation for vehicle
detection,” Electronics letters, vol. 45, no. 1, pp. 32-34, 2009.
[26] M.M. Abutaleb, A. Hamdy, M.E. Abuelwafa, and E.M.
Saad, “FPGA-based object-extraction based on multimodal Σ-Δ background estimation,” in Proc. 2ed
International Conference on Computer, Control and Communication, Feb. 2009, pp. 1-7.
[27] M. Vargas, J.M. Milla, S.L. Toral, and F. Barrero, “An enhanced background estimation algorithm for vehicle
detection in urban traffic scenes,” IEEE Transactions on Vehicular Technology, vol. 59, no. 8, pp. 3694-3709,
2010. [28] L. Lacassagne, and A. Manzanera, “Motion detection:
Fast and robust algorithms for embedded systems,” in International Conference on Image Processing (ICIP),
2009. [29] K. Li, and Y. Yang, “A method for background modeling
and moving object detection in video surveillance,” in Proc. IEEE 4th International Congress on Image and
Signal Processing, Oct. 2011, vol. 1, pp. 381-385. [30] S.C. Sen-Ching, and C. Kamath, “Robust techniques for
background subtraction in urban traffic video,” International Society for Optics and Photonics in
Electronic Imaging, Jan. 2004, pp. 881-892. [31] M. Haque, M.M. Murshed, and M. Paul, “Improved
Gaussian mixtures for robust object detection by adaptive multi-background generation,” IEEE 19th International
Conference on Pattern Recognition (ICPR), Dec. 2008, pp. 1-4.
[32] Z. Zivkovic, and F. van der Heijden, “Efficient adaptive density estimation per image pixel for the task of
background subtraction,” Pattern recognition letters, vol.
27, no. 7, pp. 773-780, 2006. [33] N. Greggio, A. Bernardino, C. Laschi, P. Dario, and J.
Santos-Victor, “Self-adaptive Gaussian mixture models for real-time video segmentation and background
subtraction,” in Proc. IEEE 10th International Conference on Intelligent Systems Design and
Applications(ISDA), Nov. 2010, pp. 983-989. [34] S.L. Zhao, and H.J. Lee, “A spatial-extended background
model for moving blobs extraction in indoor environments,” Journal of Information Science and
Engineering, vol. 25, no. 6, pp. 1819-1837, 2009. [35] M. Izadi, and P. Saeedi, “Robust region-based
background subtraction and shadow removing using color and gradient information,” IEEE 19th International
Conference on Pattern Recognition (ICPR), Dec. 2008, pp. 1-5.
[36] N. Martel-Brisson, and A. Zaccarin, “Learning and removing cast shadows through a multidistribution
approach,” IEEE Transactions on Pattern Analysis and Machine Intelligence, vol. 29, no. 7, pp. 1133-1146, 2007.
[37] P. Barcellos, C. Bouvié, F.L. Escouto, and J. Scharcanski, “A novel video based system for detecting and counting
vehicles at user-defined virtual loops,” Expert Systems with Applications, vol. 42, no. 4, pp. 1845-1856, 2015.
[38] W. Zhang, Q.J. Wu, X. Yang, and X. Fang, “Multilevel framework to detect and handle vehicle occlusion,” IEEE
Transactions on Intelligent Transportation Systems, vol. 9, no. 1, pp. 161-174, 2008.
[39] B. Johansson, J. Wiklund, P.E. Forssén, and G. Granlund,
“Combining shadow detection and simulation for estimation of vehicle size and position,” Pattern
Recognition Letters, vol. 30, no. 8, pp. 751-759, 2009. [40] N. Buch, J. Orwell, and S.A. Velastin, “Urban road user

International Journal of Applied Engineering Research ISSN 0973-4562 Volume 11, Number 1 (2016) pp 713-726
© Research India Publications. http://www.ripublication.com
723
detection and classification using 3D wire frame models,”
IET Computer Vision, vol. 4, no. 2, pp. 105-116, 2010. [41] A. Mittal, and N. Paragios, “Motion-based background
subtraction using adaptive kernel density estimation,” in Proc. of the 2004 IEEE Computer Society Conference on
Computer Vision and Pattern Recognition (CVPR), Jul. 2004, vol. 2, pp. II-302.
[42] A. Elgammal, D. Harwood, and L. Davis, “Non-parametric model for background subtraction,” In
Computer Vision (ECCV), pp. 751-767. Springer Berlin Heidelberg, 2000.
[43] J. Hao, C. Li, Z. Kim, and Z. Xiong, “Spatio-temporal traffic scene modeling for object motion detection,” IEEE
Transactions on Intelligent Transportation Systems, vol. 14, no. 1, pp. 295-302, 2013.
[44] Y. Sheikh, and M. Shah, “Bayesian modeling of dynamic scenes for object detection,” IEEE Transactions on
Pattern Analysis and Machine Intelligence, vol. 27, no. 11, pp. 1778-1792, 2005.
[45] K. Kim, T.H. Chalidabhongse, D. Harwood, and L. Davis, “Real-time foreground–background segmentation using
codebook model,” Real-time imaging, vol. 11, no. 3, pp. 172-185, 2005.
[46] A. Pal, G. Schaefer, and M.E. Celebi, “Robust codebook-based video background subtraction,” in Proc. IEEE
International Conference on Acoustics Speech and Signal Processing (ICASSP), Mar. 2010, pp. 1146-1149.
[47] S. Noh, and M. Jeon, “A new framework for background subtraction using multiple cues,” in Computer Vision
(ACCV), Jan. 2013, pp. 493-506. Springer Berlin
Heidelberg. [48] S. Noh, D. Shim, and M. Jeon, “Background subtraction
method using codebook-GMM model,” in Proc. of IEEE International Conference on Control, Automation and
Information Sciences (ICCAIS), Dec. 2014, pp. 117-120. [49] A. Ilyas, M. Scuturici, and S. Miguet, “Real time
foreground-background segmentation using a modified codebook model,” in IEEE 6th International Conference
on Advanced Video and Signal Based Surveillance, 2009, pp. 454-459.
[50] K.P. Karmann, A.V. Brandt, and R. Gerl, “Moving object segmentation based on adaptive reference images,” in
Proc. of 5th European Signal Processing Conference, 1990, vol. 2, pp. 951-954.
[51] N.M. Oliver, B. Rosario, and A.P. Pentland, “A Bayesian computer vision system for modeling human
interactions,” IEEE Transactions on Pattern Analysis and Machine Intelligence, vol. 22, no. 8, pp. 831-843, 2000.
[52] R.E. Kalman, “A new approach to linear filtering and prediction problems,” Journal of Fluids Engineering, vol.
82, no. 1, pp. 35-45, 1960. [53] J. Heikkilä, and O. Silvén, “A real-time system for
monitoring of cyclists and pedestrians,” Image and Vision Computing, vol. 22, no. 7, pp. 563-570, 2004.
[54] D. Koller, J. Weber, and J. Malik, “Towards realtime visual based tracking in cluttered traffic scenes,” in Proc.
of the IEEE Intelligent Vehicles’ 94 Symposium, Oct. 1994, pp. 201-206.
[55] S. Messelodi, C.M. Modena, N. Segata, and M. Zanin, “A
kalman filter based background updating algorithm robust to sharp illumination changes,” in Image Analysis and
Processing (ICIAP), Jan. 2005, pp. 163-170. Springer Berlin Heidelberg.
[56] J. Scott, M. Pusateri, and D. Cornish, “Kalman filter
based video background estimation,” in Applied Imagery Pattern Recognition Workshop (AIPRW), Oct. 2009, pp.
1-7. [57] Z. Hu, G. Ye, G. Jia, X. Chen, Q. Hu, K. Jiang, Y. Wang,
L. Qing, Y. Tian, X. Wu, and W. Gaoa, “Pku@ trecvid2009: Single-actor and pair-activity event detection
in surveillance video,” in Proc. TRECvid. 2009. [58] Y. Tian, Y. Wang, Z. Hu, and T. Huang, “Selective
eigenbackground for background modeling and subtraction in crowded scenes,” IEEE Transactions on
Circuits and Systems for Video Technology, vol. 23, no. 11, pp. 1849-1864, 2013.
[59] C.L. Huang, and W.C. Liao, “A vision-based vehicle identification system,” in Proc. IEEE 17th International
Conference on Pattern Recognition, vol. 4, 2004, pp. 364-367.
[60] A. Ottlik, and H.H. Nagel, “Initialization of model-based vehicle tracking in video sequences of inner-city
intersections,” International Journal of Computer Vision, vol. 80, no. 2, pp. 211-225, 2008.
[61] S. Indu, M. Gupta, and A. Bhattacharyya, “Vehicle tracking and speed estimation using optical flow method,”
Int. J. Engineering Science and Technology, vol. 3, no. 1, pp. 429-434, 2011.
[62] D.G. Lowe, “Object recognition from local scale-invariant features”, in proc. IEEE 7th international
conference on Computer vision, Jan. 1999, vol. 2, pp. 1150-1157.
[63] S. Agarwal, A. Awan, and D. Roth, “Learning to detect
objects in images via a sparse, part-based representation,” IEEE Transactions on Pattern Analysis and Machine
Intelligence, vol. 26, no. 11, pp. 1475-1490, 2004. [64] X. Ma, and W.E.L. Grimson, “Edge-based rich
representation for vehicle classification,” in Proc. IEEE 10th International Conference on Computer Vision, vol.
2, Oct. 2005, pp. 1185-1192. [65] H. Bay, T. Tuytelaars, and L. Van Gool, “Surf: Speeded
up robust features,” in Computer vision (ECCV), Jan. 2006, pp. 404-417. Springer Berlin Heidelberg.
[66] N. Dalal, and B. Triggs, “Histograms of oriented gradients for human detection,” in proc. IEEE Computer
Society Conference on Computer Vision and Pattern Recognition, vol. 1, Jun. 2005, pp. 886-893.
[67] P. Viola, and M. Jones, “Rapid object detection using a boosted cascade of simple features,” in proc. of the 2001
IEEE Computer Society Conference on Computer Vision and Pattern Recognition, 2001, vol. 1, pp. I-511.
[68] T. Gao, Z.G. Liu, W.C. Gao, and J. Zhang, “Moving vehicle tracking based on SIFT active particle choosing,”
in Advances in Neuro-Information Processing, Jan. 2009, pp. 695-702. Springer Berlin Heidelberg.
[69] K.M.A. Yousef, M. Al-Tabanjah, E. Hudaib, and M. Ikrai, “SIFT based automatic number plate recognition,”
in proc. IEEE 6th International Conference on Information and Communication Systems (ICICS), Apr.
2015, pp. 124-129. [70] X. Chen, and Q. Meng, “Vehicle detection from UAVs by
using SIFT with implicit shape model,” in proc. IEEE
International Conference on Systems, Man, and Cybernetics (SMC), Oct. 2013, pp. 3139-3144.
[71] L. Wei, X. Xudong, W. Jianhua, Z. Yi, and H. Jianming, “A SIFT-based mean shift algorithm for moving vehicle

International Journal of Applied Engineering Research ISSN 0973-4562 Volume 11, Number 1 (2016) pp 713-726
© Research India Publications. http://www.ripublication.com
724
tracking,” in Proc. IEEE Intelligent Vehicles Symposium,
Jun. 2014, pp. 762-767. [72] W. Zhang, B. Yu, G.J. Zelinsky, and D. Samaras, “Object
class recognition using multiple layer boosting with heterogeneous features,” in Proc. IEEE Computer Society
Conference on Computer Vision and Pattern Recognition (CVPR ), June, 2005, vol. 2, pp. 323-330.
[73] A.P. Psyllos, C.N.E. Anagnostopoulos, and E. Kayafas, “Vehicle logo recognition using a sift-based enhanced
matching scheme,” IEEE Transactions on Intelligent Transportation Systems, vol. 11, no. 2, pp. 322-328,
2010. [74] Z. Qian, J. Yang, and L. Duan, “Multiclass vehicle
tracking based on local feature”, in Proc. 2013 Chinese Conference on Intelligent Automation, Jan. 2013, pp. 137-
144. Springer Berlin Heidelberg. [75] Z. Wang, and K. Hong, “A new method for robust object
tracking system based on scale invariant feature transform and camshift,” in Proc. 2012 ACM Research in Applied
Computation Symposium, Oct. 2012, pp. 132-136. [76] J.W. Hsieh, L.C. Chen, and D.Y. Chen, “Symmetrical
SURF and its applications to vehicle detection and vehicle make and model recognition,” IEEE Transactions
on Intelligent Transportation Systems, vol. 15, no. 1, pp. 6-20, 2014.
[77] L.C. Chen, J.W. Hsieh, H.F. Chiang, and T.H. Tsai, “Real-time vehicle color identification using symmetrical
SURFs and chromatic strength,” in proc. of IEEE International Symposium on Circuits and Systems, May.
2015, pp. 2804-2807.
[78] B.F. Momin, and S.M. Kumbhare, “Vehicle detection in video surveillance system using Symmetrical SURF,” in
IEEE International Conference on Electrical, Computer and Communication Technologies(ICECCT), Mar. 2015,
pp. 1-4. [79] T.D. Gamage, J.G. Samarawickrama, and A.A. Pasqual,
“GPU based non-overlapping multi-camera vehicle tracking,” in IEEE 7th International Conference on
Information and Automation for Sustainability (ICIAfS), Dec. 2014, pp. 1-6.
[80] S. Shujuan, X. Zhize, W. Xingang, H. Guan, W. Wenqi, and X. De, “Real-time vehicle detection using Haar-
SURF mixed features and gentle AdaBoost classifier,” in Chinese IEEE 27th Control and Decision Conference,
May. 2015, pp. 1888-1894. [81] N. Buch, J. Orwell, and S.A. Velastin, “3D extended
histogram of oriented gradients (3DHOG) for classification of road users in urban scenes,” in Proc. of
the British Machine Conference, pp. 15-1. [82] M. Cheon, W. Lee, C. Yoon, and M. Park, “Vision-based
vehicle detection system with consideration of the detecting location,” IEEE Transactions on Intelligent
Transportation Systems, vol. 13, no. 3, pp. 1243-1252, 2012.
[83] H.T. Niknejad, A. Takeuchi, S. Mita, and D. McAllester, “On-road multivehicle tracking using deformable object
model and particle filter with improved likelihood estimation,” IEEE Transactions on Intelligent
Transportation Systems, vol. 13, no. 2, pp. 748-758, 2012.
[84] S. Tuermer, F. Kurz, P. Reinartz, and U. Stilla, “Airborne vehicle detection in dense urban areas using HoG features
and disparity maps,” IEEE Journal of Selected Topics in Applied Earth Observations and Remote Sensing, vol. 6,
no. 6, pp. 2327-2337, 2013.
[85] B.F. Wu, C.C. Kao, C.L. Jen, Y.F. Li, Y.H. Chen, and J.H. Juang, “A relative-discriminative-histogram-of-
oriented-gradients-based particle filter approach to vehicle occlusion handling and tracking,” IEEE
Transactions on Industrial Electronics, vol. 61, no. 8, pp. 4228-4237, 2014.
[86] H. Huijie, X. Chao, Z. Jun, and G. Wenjun, “The moving vehicle detection and tracking system based on video
image,” in Proc. IEEE 3ed International Conference on Instrumentation, Measurement, Computer,
Communication and Control (IMCCC), Sep. 2013, pp. 1277-1280.
[87] S.M. Elkerdawi, R. Sayed, and M. ElHelw, “Real-time vehicle detection and tracking using Haar-like features
and compressive tracking,” in 1st Iberian Robotics Conference, Jan. 2014, pp. 381-390. Springer
International Publishing. [88] S. ElKerdawy, A. Salaheldin, and M. ElHelw, “Vision-
based scale-adaptive vehicle detection and tracking for intelligent traffic monitoring,” in IEEE International
Conference on Robotics and Biomimetics, Dec. 2014, pp.1044-1049.
[89] N. Miller, M.A. Thomas, J.A. Eichel, and A. Mishra, “A hidden markov model for vehicle detection and
counting,” in IEEE 12th Conference on Computer and Robot Vision (CRV), Jun. 2015, pp. 269-276.
[90] H. Bai, T. Wu, and C. Liu, “Motion and Haar-like features based vehicle detection,” in Proc. IEEE 12th
International Conference on Multi-Media Modelling
Proceedings, Jan. 2006, pp. 4-pp. [91] B.F. Momin, and T.M. Mujawar, “Vehicle detection and
attribute based search of vehicles in video surveillance system,” in IEEE International Conference on Circuit,
Power and Computing Technologies (ICCPCT), Mar. 2015, pp. 1-4.
[92] T.T. Nguyen, and T.T. Nguyen, “A real time license plate detection system based on boosting learning
algorithm,” in Proc. IEEE 5th International Congress on Image and Signal Processing (CISP), Oct. 2012, pp. 819-
823. [93] B. Zhang, and Y. Zhou, “Reliable vehicle type
classification by classified vector quantization,” in Proc. IEEE 5th International Congress on Image and Signal
Processing (CISP), Oct. 2012, pp. 1148-1152. [94] L. Lin, T. Wu, J. Porway, and Z. Xu, “A stochastic graph
grammar for compositional object representation and recognition,” Pattern Recognition, vol. 42, no. 7, pp.
1297-1307, 2009. [95] J. Winn, and J. Shotton, “The layout consistent random
field for recognizing and segmenting partially occluded objects,” in Proc. IEEE Computer Society Conference on
Computer Vision and Pattern Recognition, Jun. 2006, vol. 1, pp. 37-44.
[96] D. Hoiem, C. Rother, and J. Winn, “3D layoutcrf for multi-view object class recognition and segmentation,” in
IEEE Conference on Computer Vision and Pattern Recognition, Jun. 2007, pp. 1-8.
[97] S. Sivaraman, and M.M. Trivedi, “Vehicle detection by
independent parts for urban driver assistance,” IEEE Transactions on Intelligent Transportation Systems, vol.
14, no. 4, pp. 1597-1608, 2013. [98] J.M. Ferryman, A.D. Worrall, G.D. Sullivan, and K.D.

International Journal of Applied Engineering Research ISSN 0973-4562 Volume 11, Number 1 (2016) pp 713-726
© Research India Publications. http://www.ripublication.com
725
Baker, “A generic deformable model for vehicle
recognition,” in Proc. Brit. Mach. Vis. Conf.(BMVC), Sep. 1995, pp. 127–136.
[99] S. Messelodi, C.M. Modena, and M. Zanin, “A computer vision system for the detection and classification of
vehicles at urban road intersections,” Pattern analysis and applications, vol. 8, no. 1-2, pp. 17-31, 2005.
[100] X. Song, and R. Nevatia, “Detection and tracking of moving vehicles in crowded scenes,” in IEEE Workshop
on Motion and Video Computing, Feb. 2007, pp. 4-4. [101] N. Buch, J. Orwell, and S.A. Velastin, “Detection and
classification of vehicles for urban traffic scenes,” in 5th International Conference on Visual Information
Engineering, Jul. 2008, pp. 182-187. [102] N. Buch, F. Yin, J. Orwell, D. Makris, and S.A. Velastin,
“Urban vehicle tracking using a combined 3D model detector and classifier,” in Knowledge-Based and
Intelligent Information and Engineering Systems, Jan. 2009, pp. 169-176. Springer Berlin Heidelberg.
[103] M.J. Leotta, and J.L. Mundy, “Vehicle surveillance with a generic, adaptive, 3D vehicle model,” IEEE Transactions
on Pattern Analysis and Machine Intelligence, vol. 33, no. 7, pp. 1457-1469, 2011.
[104] J.W. Hsieh, L.C. Chen, S.Y. Chen, D.Y. Chen, S. Alghyaline, and H.F. Chiang, “Vehicle color
classification under different lighting conditions through color correction,” IEEE Sensors Journal, vol. 15, no. 2,
pp. 971-983, 2015. [105] O. Hasegawa, and T. Kanade, “Type classification, color
estimation, and specific target detection of moving targets
on public streets,” Machine Vision and Applications, vol. 16, no. 2, pp. 116-121, 2005.
[106] N. Baek, S.M. Park, K.J. Kim, and S.B. Park, “Vehicle color classification based on the support vector machine
method,” in Advanced Intelligent Computing Theories and Applications. With Aspects of Contemporary
Intelligent Computing Techniques, 2007, pp. 1133-1139. Springer Berlin Heidelberg.
[107] E. Dule, M. Gokmen, and M.S. Beratoglu, “A convenient feature vector construction for vehicle color recognition,”
in Proc. 11th WSEAS International Conference on Neural Networks, Evolutionary Computing and Fuzzy systems,
Jun. 2010, pp. 250-255. [108] P. Chen, X. Bai, and W. Liu, “Vehicle color recognition
on urban road by feature context”, IEEE Transactions on Intelligent Transportation Systems, vol. 15, no. 5, pp.
2340-2346, 2014. [109] X. Wan, J. Liu, and J. Liu, “A vehicle license plate
localization method using color barycenters hexagon model,” in Society of Photo-Optical Instrumentation
Engineers Conference Series, 2011, vol. 8009, pp. 95. [110] C.N.E. Anagnostopoulos, I.E. Anagnostopoulos, V.
Loumos, and E. Kayafas, “A license plate-recognition algorithm for intelligent transportation system
applications,” IEEE Transactions on Intelligent Transportation Systems, vol. 7, no. 3, pp. 377-392, 2006.
[111] Z.X. Chen, C.Y. Liu, F.L. Chang, and G.Y. Wang, “Automatic license-plate location and recognition based
on feature salience,” IEEE Transactions on Vehicular
Technology, vol. 58, no. 7, pp. 3781-3785, 2009. [112] B.F. Wu, S.P. Lin, and C.C. Chiu, “Extracting characters
from real vehicle licence plates out-of-doors,” IET Computer Vision, Mar. 2007, vol. 1, no. 1, pp. 2-10.
[113] J. Jiao, Q. Ye, and Q. Huang, “A configurable method for
multi-style license plate recognition,” Pattern Recognition, vol. 42, no. 3, pp. 358-369, 2009.
[114] D. Llorens, A. Marzal, V. Palazón, and J.M. Vilar, “Car license plates extraction and recognition based on
connected components analysis and HMM decoding,” in Pattern Recognition and Image Analysis, 2005, pp. 571-
578. Springer Berlin Heidelberg. [115] K.K. Kim, K.I. Kim, J.B. Kim, and H.J. Kim, “Learning-
based approach for license plate recognition,” in Proc. 2000 IEEE Signal Processing Society Workshop on
Neural Networks for Signal Processing, 2000, vol. 2, pp. 614-623.
[116] H.E. Kocer, and K.K. Cevik, “Artificial neural networks based vehicle license plate recognition,” Procedia
Computer Science, Dec. 2011, vol. 3, pp. 1033-1037. [117] Y. Wang, N. Li, and Y. Wu, “Application of edge testing
operator in vehicle logo recognition,” in 2ed International Workshop on Intelligent Systems and Applications, 2010,
pp. 1-3. [118] H. Yang, L. Zhai, Z. Liu, L. Li, Y. Luo, Y. Wang, H. Lai,
and M. Guan, “An efficient method for vehicle model identification via logo recognition,” in 5th International
Conference on Computational and Information Sciences (ICCIS), Jun. 2013, pp. 1080-1083.
[119] A. Psyllos, C.N. Anagnostopoulos, E. Kayafas, and V. Loumos, “Image processing & artificial neural networks
for vehicle make and model recognition,” in Proc. 10th International Conference on applications of advanced
technologies in transportation, May. 2008, vol. 5, pp.
4229-4243. [120] D. Han, M.J. Leotta, D.B. Cooper, and J.L. Mundy,
“Vehicle class recognition from video-based on 3d curve probes,” in 2ed Joint IEEE International Workshop on
Visual Surveillance and Performance Evaluation of Tracking and Surveillance, , Oct. 2005, pp. 285-292.
[121] P. Negri, X. Clady, M. Milgram, and R. Poulenard, “An oriented-contour point based voting algorithm for vehicle
type classification,” In 18th International Conference on Pattern Recognition, Aug. 2006, vol. 1, pp. 574-577.
[122] Z. Chen, T. Ellis, and S. Velastin, “Vehicle detection, tracking and classification in urban traffic,” in 15th
International IEEE Conference on Intelligent Transportation Systems (ITSC), Sep. 2012, pp. 951-956.
[123] N.S. Thakoor, and B. Bhanu, “Structural signatures for passenger vehicle classification in video,” IEEE
Transactions on Intelligent Transportation Systems, vol. 14, no. 4, pp. 1796-1805, 2013.
[124] D.T. Munroe, and M.G. Madden, “Multi-class and single-class classification approaches to vehicle model
recognition from images,” in Proc. AICS (2005). [125] I. Zafar, E.A. Edirisinghe, S. Acar, and H.E. Bez, “Two-
dimensional statistical linear discriminant analysis for real-time robust vehicle-type recognition,” in
International Society for Optics and Photonics Electronic Imaging 2007, pp. 649602-649602.
[126] H. Huang, Q. Zhao, Y. Jia, and S. Tang, “A 2DLDA based algorithm for real time vehicle type recognition,” in
IEEE 11th International Conference on Intelligent
Transportation Systems, Oct. 2008, pp. 298-303. [127] R.S. Feris, B. Siddiquie, J. Petterson, Y. Zhai, A. Datta,
L.M. Brown, and S. Pankanti, “Large-scale vehicle detection, indexing, and search in urban surveillance

International Journal of Applied Engineering Research ISSN 0973-4562 Volume 11, Number 1 (2016) pp 713-726
© Research India Publications. http://www.ripublication.com
726
videos”, IEEE Transaction on Multimedia, vol. 14, no. 1,
pp. 28-42, 2012. [128] B. Zhang, “Reliable classification of vehicle types based
on cascade classifier ensembles,” IEEE Transactions on Intelligent Transportation Systems, vol. 14, no. 1, pp.
322-332, 2013. [129] J. Lou, T. Tan, W. Hu, H. Yang, and S.J. Maybank, “3-D
model-based vehicle tracking,” IEEE Transactions on Image Processing, vol. 14, no. 10, pp. 1561-1569, 2005.
[130] K.H. Lee, J.N. Hwang, and S.I. Chen, “Model-based vehicle localization based on 3-D constrained multiple-
kernel tracking,” IEEE Transactions on Circuits and Systems for Video Technology, vol. 25, no. 1, pp. 38-50,
2015. [131] T.N. Tan, and K.D. Baker, “Efficient image gradient
based vehicle localization,” IEEE Transactions on Image Process., vol. 9, no. 8, pp. 1343–1356, 2000.
[132] Z. Zhang, T. Tan, K. Huang, and Y. Wang, “Three-dimensional deformable-model-based localization and
recognition of road vehicles,” IEEE Transactions on Image Process., vol. 21, no. 1, pp. 1–13, 2012.
[133] Y.L. Lin, M.K. Tsai, W.H. Hsu, and C.W. Chen, “Investigating 3-D model and part information for
improving content based vehicle retrieval,” IEEE Transactions on Circuits and Systems for Video
Technology, vol. 23, no. 3, 2013, pp. 401–412. [134] N.A. Mandellos, I. Keramitsoglou, and C.T. Kiranoudis,
“A background subtraction algorithm for detecting and tracking vehicles,” Expert Systems with Applications, vol.
38, no. 3, pp. 1619-1631, 2011.
[135] J.C. Lai, S.S. Huang, and C.C. Tseng, “Image-based vehicle tracking and classification on the highway,” in
International Conference on Green Circuits and Systems (ICGCS), Jun. 2010, pp. 666-670.
[136] B.T. Morris, and M.M. Trivedi, “Learning, modeling, and classification of vehicle track patterns from live
video,” IEEE Transactions on Intelligent Transportation Systems, vol. 9, no. 3, pp. 425-437, 2008.
[137] F. Bardet, and T. Chateau, “MCMC particle filter for real-time visual tracking of vehicles,” in IEEE 11th
International Conference on Intelligent Transportation Systems, Oct. 2008, pp. 539-544.
[138] E.B. Meier, and F. Ade, “Tracking cars in range images using the condensation algorithm,” in Proc. IEEE
International Conference on Intelligent Transportation Systems, 1999, pp. 129-134.
[139] T.A. Bragatto, G.I. Ruas, V.A. Benso, M.V. Lamar, D. Aldigueri, G.L. Teixeira, and Y. Yamashita, “A new
approach to multiple vehicle tracking in intersections using Harris corners and adaptive background
subtraction,” in IEEE Intelligent Vehicles Symposium, Jun. 2008, pp. 548-553.
[140] P.L.M. Bouttefroy, A. Bouzerdoum, S.L. Phung, and A. Beghdadi, “Vehicle tracking using projective particle
filter,” in IEEE 6th International Conference on Advanced Video and Signal Based Surveillance, Sep.
2009, pp. 7-12. [141] Y. Du, and F. Yuan, “Real-time vehicle tracking by
Kalman filtering and Gabor decomposition,” in 1st
International Conference on Information Science and Engineering (ICISE), Dec. 2009, pp. 1386-1390.
[142] N. Wang, and D.Y. Yeung, “Learning a deep compact image representation for visual tracking,” in Advances in
Neural Information Processing Systems, 2013, pp. 809-
817. [143] E. Maggio, and A. Cavallaro, “Hybrid particle filter and
mean shift tracker with adaptive transition model,” in Proc. IEEE International Conference on Acoustics,
Speech, and Signal Processing, Mar. 2005, vol. 2, pp. 221-224.
[144] T. Xiong, and C. Debrunner, “Stochastic car tracking with line-and color-based features,” IEEE Transactions on
Intelligent Transportation Systems, vol. 5, no. 4, pp. 324-328, 2004.
[145] M. Montemerlo, J. Becker, S. Bhat, H. Dahlkamp, D. Dolgov, S. Ettinger, D. Haehnel, T. Hilden, G. Hoffmann,
B. Huhnke, and D. Johnston, “Junior: The stanford entry in the urban challenge,” Journal of field Robotics vol. 25,
no. 9, pp. 569-597, 2008. [146] A.B. de Oliveira, and J. Scharcanski, “Vehicle counting
and trajectory detection based on particle filtering,” in 23ed SIBGRAPI Conference on Graphics Patterns and
Images, Aug. 2010, pp. 376-383. [147] H. Rezaee, A. Aghagolzadeh, and H. Seyedarabi,
“Vehicle tracking by fusing multiple cues in structured environments using particle filter,” in IEEE Asia Pacific
Conference on Circuits and Systems, Dec. 2010, pp. 1001-1004.
[148] C. Bouvie, J. Scharcanski, P. Barcellos, and F. Lopes Escouto, “Tracking and counting vehicles in traffic video
sequences using particle filtering,” in IEEE International Instrumentation and Measurement Technology
Conference, May. 2013. pp. 812-815.
[149] W. Zhang, Q.J. Wu, G. Wang, and X. You, “Tracking and pairing vehicle headlight in night scenes,” IEEE
Transactions on Intelligent Transportation Systems, vol. 13, no. 1, pp. 140-153, 2012.