trace-penalty minimization for large-scale eigenspace...
TRANSCRIPT
Trace-Penalty Minimization forLarge-scale Eigenspace Computation
Yin Zhang
Department of Computational and Applied MathematicsRice University, Houston, Texas, USA
(Co-authors: Zaiwen Wen, Chao Yang and Xin Liu) 1
CAAM VIGRE Seminar, January 31, 2013
1SJTU (Shanghai), LBL (Berkeley) and CAS (Beijing)Yin Zhang (RICE) EIGPEN February, 2013 1 / 39

Outline
1 IntroductionProblem DescriptionExisting Methods
2 MotivationLarge Scale RedefinedAvoid the Bottleneck
3 Trace-Penalty MinimizationBasic IdeaModel AnalysisAlgorithm Framework
4 Numerical Results and ConclusionNumerical Experiments and ResultsConcluding Remarks
Yin Zhang (RICE) EIGPEN February, 2013 2 / 39
Section I. Eigenvalue/vector Computation:
Fundamental, yet still Challenging
Yin Zhang (RICE) EIGPEN February, 2013 3 / 39
Problem Description and Applications
Given a symmetric n × n real matrix A
Eigenvalue Decomposition
AQ = QΛ (1.1)
Q ∈ Rn×n is orthogonal.
Λ ∈ Rn×n is diagonal (with λ1 ≤ λ2 ≤ ... ≤ λn on diagonal).
k−truncated decomposition (k largest/smallest eigenvalues)
AQk = Qk Λk (1.2)
Qk ∈ Rn×k with orthonormal columns; k � n.
Λk ∈ Rk×k is diagonal with largest/smallest k eigenvalues.
Yin Zhang (RICE) EIGPEN February, 2013 4 / 39

Applications
Basic Problem in Numerical Linear AlgebraVarious scientific and engineering applications
Lowest-energy states (Materials, Physics, Chemistry)Density functional theory for Electron StructuresNonlinear eigenvalue problems
Singular Value DecompositionData analysis, e.g., PCAIll-posed problemsMatrix rank minimization
F Increasingly large-scale sparse matricesF Increasingly large portions of the spectrum
Yin Zhang (RICE) EIGPEN February, 2013 5 / 39
Some Existing MethodsBooks and Surveys
Saad, 1992, “Numerical Methods for Large Eigenvalue Problems”
Sorensen, 2002, “Numerical Methods for Large Eigenvalue Problems”
Hernandez et al, 2009, “A Survey of Software for Sparse Eigenvalue Problems”
Krylov Subspace Techniques
Arnodi methods, Lanczos Methods – ARPACK (eigs in Matlab)
Sorensen, 1996, “Implicitly Restarted Arnoldi/Lanczos Methods for ...... ”
Krylov-Schur, ......
Optimization based, e.g., LOBPCG
Subspace Iteration, Jacobi-Davidson, polynomial filtering, ...
Keep orthogonality: XTX = I at each iteration
Rayleigh-Ritz (RR): [V ,D] = eig(XTAX);X = X ∗ V ;
Yin Zhang (RICE) EIGPEN February, 2013 6 / 39

Section II. Motivation:
A Method for Larger Eigenspaces
with Richer Parallelism
Yin Zhang (RICE) EIGPEN February, 2013 7 / 39
What is Large Scale?
Ordinarily Large Scale:
A large and sparse matrix, say n = 1M
A small number of eigen-pairs, say k = 100
Doubly Large Scale:
A large and sparse matrix, say n = 1M
A large number of eigen-pairs, say k = 1% ∗ n
A sequence of doubly large scale problems
Change of characters as k jumps: X ∈ Rn×k
Cost of RR / orth(X)� AX
Parallelism becomes a critical factor
Low parallelism in RR/Orth =⇒ Opportunity for new methods?
Yin Zhang (RICE) EIGPEN February, 2013 8 / 39
Example: DFT, Materials Science
Kohn-Sham Total Energy Minimization
min Etotal(X) s.t. XT X = I, (2.1)
where, for ρ(X) := diag(XXT ),
Etotal(X) := tr(XT (
12
L + Vion)X)
+12ρTL†ρ + ρTεxc(ρ) + Erep .
Nonlinear eigenvalue problem: up to 10% smallest eigen-pairs.
A Main Approach: SCF — a sequence of linear eigenvalue problems
Yin Zhang (RICE) EIGPEN February, 2013 9 / 39

Avoid the Bottleneck
Two Types of Computation: AX and RR/orth
As k becomes large, AX is dominated by RR/orth — bottleneck
Parallelism
AX −→ Ax1 ∪ Ax2 ∪ ... ∪ Axk . Higher.
RR/orth contains sequentiality. Lower.
Avoid bottleneck?
Do fewer RR/orth
No free lunch?
Do more BLAS3(higher parallelism than AX )
Yin Zhang (RICE) EIGPEN February, 2013 10 / 39
Section III. Trace-Penalty Minimization:
Free of Orthogonalization
BLAS3-Dominated Computation
Yin Zhang (RICE) EIGPEN February, 2013 11 / 39
Basic Idea
Trace Minimization
minX∈Rn×k
{tr(XTAX) : XTX = I} (3.1)
Trace-penalty Minimization
minX∈Rm×k
f(X) :=12
tr(XTAX) +µ
4‖XTX − I‖2F. (3.2)
It is well known that µ→ ∞, (3.2) =⇒ (3.1)
Quadratic Penalty Function (Courant 1940’s)This idea appears old and unsophisticated. However, ......
Yin Zhang (RICE) EIGPEN February, 2013 12 / 39

“Exact” Penalty
However, µ→ ∞ is unnecessary.
Theorem (Equivalence in Eigenspace)Problem (3.2) is equivalent to (3.1) if and only if
µ > λk . (3.3)
Under (3.3), all minimizers of (3.2) have the SVD form:
X = Qk (I − Λk/µ)1/2VT , (3.4)
where Qk consist of k eigenvectors associated with a set of k smallesteigenvalues that form the diagonal matrix Λk , and V ∈ Rk×k is anyorthogonal matrix.
Yin Zhang (RICE) EIGPEN February, 2013 13 / 39
Fewer Saddle Points
Original Model: min{tr(XTAX) : XTX = I, X ∈ Rn×k }
One minimum/maximum subspace (discounting multiplicity).
All k -dimensional eigenspaces are saddle points.
However, for the penalty model:
TheoremLet f(X) be the penalty function associated with parameter µ > 0.
1 For µ ∈ (λk , λn), f(X) has a unique minimum, no maximum.2 For µ ∈ (λk , λk+p) where λk+p is the smallest eigenvalue > λk , a
rank-k stationary point must be a minimizers, as defined in (3.4).
In a sense, the penalty model is much stronger.
Yin Zhang (RICE) EIGPEN February, 2013 14 / 39

Error Bounds between Optimality Conditions
First order condition
Our penalty model: 0 = ∇f(X) , AX + µX(XTX − I);
Original model: 0 = R(X) , AY(X) − Y(X)(Y(X)TAY(X)),where Y(X) is an orthonormal basis of span{X}.
LemmaLet ∇f(X) (with µ > λk ) and R(X) be defined as above, then
‖R(X)‖F ≤ σ−1min(X)‖∇f(X)‖F , (3.5)
where σmin(X) is the smallest singular value of X. Moreover, for any globalminimizer X and any ε > 0, there exists δ > 0 such that whenever‖X − X‖F ≤ δ,
‖R(X)‖F ≤1 + ε√1 − λk/µ
‖∇f(X)‖F . (3.6)
Yin Zhang (RICE) EIGPEN February, 2013 15 / 39

Condition Number
Condition Number of the Hessian at Solution
κ(∇2f(X)) , λmax(∇2f(X))/λmin(∇2f(X))
Determining factor for asymptotic convergence rate of gradient methods
Lemma
Let X be a global minimizer of (3.2) with µ > λk . The condition number ofthe Hessian at X satisfies
κ(∇2f(X)
)≥
max (2(µ − λ1), (λn − λ1))
min (2(µ − λk ), (λk+1 − λk )). (3.7)
In particular, the above holds as an equality for k = 1.
Gradient methods may encounter slow convergence at the end.
Yin Zhang (RICE) EIGPEN February, 2013 16 / 39

Generalizations
Generalized eigenvalue problems: XTX = I → XTBX = I
Keep out undesired subspace: UTX = 0 (UT U = I)
Trace Minimization with Subspace Constraint
minX∈Rn×k
{tr(XTAX) : XTBX = I, UTX = 0}
Trace-Penalty Formulation
minX
12
tr(XTQTAQX) +µ
4‖XTQTBQX − I‖2F
where Q = I − UUT (QX = X − U(UT X)).
With changes of variables, all results still hold.
Yin Zhang (RICE) EIGPEN February, 2013 17 / 39

Algorithms for Trace-Penalty Minimization
Gradient Methods:
X ← X − α∇f(X). ∇f(X) = AX + µX(XTX − I)
First Order Condition:
∇f(X) = 0 ⇔ AX = X(I − XTX)µ
2 Types of Computations for ∇f(X):1 AX : O(k nnz(A))
2 X(XT X): O(k 2n) — BLAS3
(2) dominates (1) whenever k � nnz(A)/n
Gradient methods requires NO RR/Orth
Yin Zhang (RICE) EIGPEN February, 2013 18 / 39

Gradient Method
Preserve Full Rank
LemmaLet X j+1 be generated by
X j+1 = X j − αj∇f(X j)
from a full rank X j . Then X j+1 is rank deficient only if 1/αj is one of the kgeneralized eigenvalues of the problem:
[(X j)T∇f(X j)]u = λ[(X j)T (X j)]u.
On the other hand, if αj < σmin(X j)/||∇f(X j)||2, X j+1 is full rank.
Combined with previous results, there is a high probability of gettinga global minimizer by using gradient type methods.
Yin Zhang (RICE) EIGPEN February, 2013 19 / 39
Gradient Methods (Cont’d)
X j+1 = X j − αj∇f(X j)
Step Size α
Non-monotone line search (Grippo 1986, Zhang-Hager 2004)
Initial BB step:
αj = arg minα||S j − αY j ||2F =
tr((S j)TY j)
||Y j ||2F
where S j = X j − X j−1, Y j = ∇f(X j) − ∇f(X j−1).
Many other choices
Yin Zhang (RICE) EIGPEN February, 2013 20 / 39

Current Algorithm
Framework:1 Pre-process — scaling, shifting, preconditioning2 Penalty parameter µ — dynamically adjusted3 Gradient iterations — main operations: X(XT X) and AX4 RR Restart — computing Ritz-pairs and restarting
(Further steps possible, but NOT used in comparison)5 Deflation — working on desired subspaces only6 Chebychev Filter — improving accuracy
Yin Zhang (RICE) EIGPEN February, 2013 21 / 39
Enhancement: RR Restarting
RR Steps return Ritz-pairs for given subspaces
1 Orthogonalization: Q ∈ orth(X)
2 Eigenvalue decomposition: QTAQ = VTΣV3 Ritz-paires: QV and diag(Σ)
RR Steps ensure accurate terminations
RR Steps can accelerate convergence
Very few RR Steps are used
Yin Zhang (RICE) EIGPEN February, 2013 22 / 39

Section IV. Numerical Results and Conclusion
Yin Zhang (RICE) EIGPEN February, 2013 23 / 39

Pilot Tests in Matlab
Matrix: delsq(numgrid(’S’,102)); size: n = 10000; tol = 1e-3
CPU Time in Seconds
50 100 150 200 250 300 350 400 450 500
50
100
150
200
250
300
CP
U S
eco
nd
Number of Eigenvalues
eigs
lobpcg
eigpen
(a) with “-singleCompThread”
50 100 150 200 250 300 350 400 450 500
20
40
60
80
100
120
CP
U S
eco
nd
Number of Eigenvalues
eigs
lobpcg
eigpen
(b) without “-singleCompThread”
Yin Zhang (RICE) EIGPEN February, 2013 24 / 39

Experiment Environment
Running PlatformA single node of a Cray XE6 supercomputer (NERSC)
Two 12-core AMD ‘MagnyCours’ 2.1-GHz processors32 GB shared memory
System and language:Cray Linux Environment version 3Fortran + OpenMP
All 24 cores are used unless otherwise specified
Solvers Tested
ARPACK
LOBPCG
EIGPEN
Yin Zhang (RICE) EIGPEN February, 2013 25 / 39

Relative Error Measurements
Let x1 x2 · · · xk be computed Ritz vectors, and θi Ritz values.
Eigenvectors:
resi =‖Axi − θixi‖2
max(1, |θi |)
Eigenvalues:
eθ = maxi
|θi − λi |
max(1, |λi |),
Trace:
etrace =|∑k
i θi −∑k
i λi |
max(1, |∑k
i λi |)
Yin Zhang (RICE) EIGPEN February, 2013 26 / 39
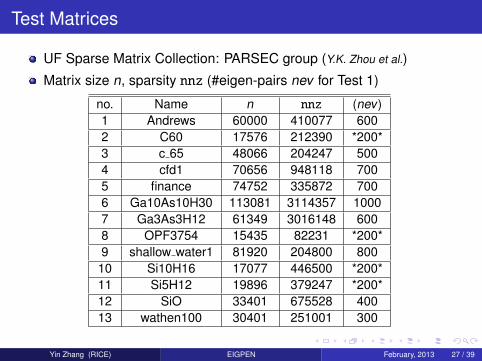
Test Matrices
UF Sparse Matrix Collection: PARSEC group (Y.K. Zhou et al.)
Matrix size n, sparsity nnz (#eigen-pairs nev for Test 1)
no. Name n nnz (nev)1 Andrews 60000 410077 6002 C60 17576 212390 *200*3 c 65 48066 204247 5004 cfd1 70656 948118 7005 finance 74752 335872 7006 Ga10As10H30 113081 3114357 10007 Ga3As3H12 61349 3016148 6008 OPF3754 15435 82231 *200*9 shallow water1 81920 204800 800
10 Si10H16 17077 446500 *200*11 Si5H12 19896 379247 *200*12 SiO 33401 675528 40013 wathen100 30401 251001 300
Yin Zhang (RICE) EIGPEN February, 2013 27 / 39
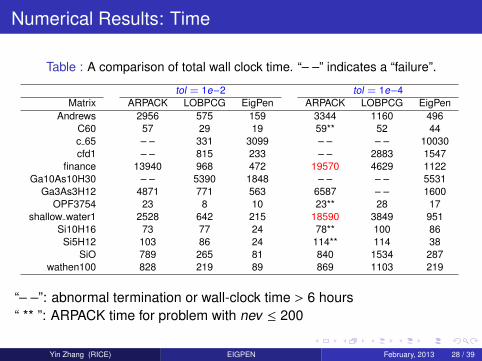
Numerical Results: Time
Table : A comparison of total wall clock time. “– –” indicates a “failure”.
tol = 1e−2 tol = 1e−4Matrix ARPACK LOBPCG EigPen ARPACK LOBPCG EigPen
Andrews 2956 575 159 3344 1160 496C60 57 29 19 59** 52 44c 65 – – 331 3099 – – – – 10030cfd1 – – 815 233 – – 2883 1547
finance 13940 968 472 19570 4629 1122Ga10As10H30 – – 5390 1848 – – – – 5531
Ga3As3H12 4871 771 563 6587 – – 1600OPF3754 23 8 10 23** 28 17
shallow water1 2528 642 215 18590 3849 951Si10H16 73 77 24 78** 100 86Si5H12 103 86 24 114** 114 38
SiO 789 265 81 840 1534 287wathen100 828 219 89 869 1103 219
“– –”: abnormal termination or wall-clock time > 6 hours“ ** ”: ARPACK time for problem with nev ≤ 200
Yin Zhang (RICE) EIGPEN February, 2013 28 / 39
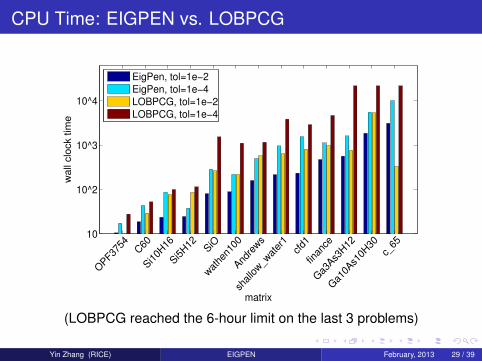
CPU Time: EIGPEN vs. LOBPCG
10
10^2
10^3
10^4
OPF37
54C60
Si10H
16
Si5H12 S
iO
wat
hen1
00
And
rews
shallow_w
ater
1cfd1
finan
ce
Ga3
As3
H12
Ga1
0As1
0H30
c_65
matrix
wa
ll clo
ck t
ime
EigPen, tol=1e−2
EigPen, tol=1e−4
LOBPCG, tol=1e−2
LOBPCG, tol=1e−4
(LOBPCG reached the 6-hour limit on the last 3 problems)
Yin Zhang (RICE) EIGPEN February, 2013 29 / 39
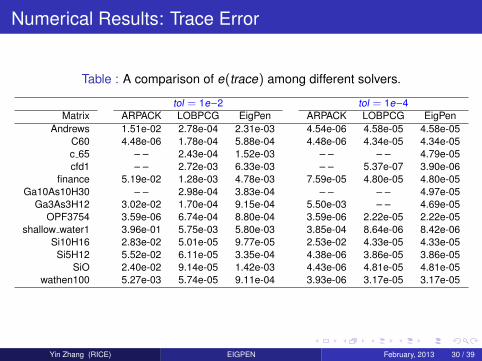
Numerical Results: Trace Error
Table : A comparison of e(trace) among different solvers.
tol = 1e−2 tol = 1e−4Matrix ARPACK LOBPCG EigPen ARPACK LOBPCG EigPen
Andrews 1.51e-02 2.78e-04 2.31e-03 4.54e-06 4.58e-05 4.58e-05C60 4.48e-06 1.78e-04 5.88e-04 4.48e-06 4.34e-05 4.34e-05c 65 – – 2.43e-04 1.52e-03 – – – – 4.79e-05cfd1 – – 2.72e-03 6.33e-03 – – 5.37e-07 3.90e-06
finance 5.19e-02 1.28e-03 4.78e-03 7.59e-05 4.80e-05 4.80e-05Ga10As10H30 – – 2.98e-04 3.83e-04 – – – – 4.97e-05
Ga3As3H12 3.02e-02 1.70e-04 9.15e-04 5.50e-03 – – 4.69e-05OPF3754 3.59e-06 6.74e-04 8.80e-04 3.59e-06 2.22e-05 2.22e-05
shallow water1 3.96e-01 5.75e-03 5.80e-03 3.85e-04 8.64e-06 8.42e-06Si10H16 2.83e-02 5.01e-05 9.77e-05 2.53e-02 4.33e-05 4.33e-05Si5H12 5.52e-02 6.11e-05 3.35e-04 4.38e-06 3.86e-05 3.86e-05
SiO 2.40e-02 9.14e-05 1.42e-03 4.43e-06 4.81e-05 4.81e-05wathen100 5.27e-03 5.74e-05 9.11e-04 3.93e-06 3.17e-05 3.17e-05
Yin Zhang (RICE) EIGPEN February, 2013 30 / 39

Numerical Results: Eigenvalue Error
Table : A comparison of maxi e(θi) among different solvers.
tol = 1e−2 tol = 1e−4Matrix ARPACK LOBPCG EigPen ARPACK LOBPCG EigPen
Andrews 1.01e-03 1.48e-05 1.06e-04 5.87e-09 1.07e-07 1.07e-07C60 1.72e-07 4.20e-06 7.48e-06 1.72e-07 9.01e-08 9.01e-08c 65 – – 5.73e-06 2.98e-05 – – – – 8.20e-07cfd1 – – 2.36e-01 5.37e-01 – – 1.43e-06 1.11e-05
finance 8.13e-03 1.18e-04 4.99e-04 2.35e-07 3.91e-07 3.91e-07Ga10As10H30 – – 1.33e-05 1.50e-05 – – – – 3.10e-07
Ga3As3H12 1.82e-03 8.57e-06 5.27e-05 6.38e-05 – – 1.01e-06OPF3754 3.47e-09 4.87e-05 1.77e-05 3.47e-09 8.84e-08 8.84e-08
shallow water1 1.30e-01 2.38e-03 1.77e-03 2.03e-05 1.70e-07 1.49e-07Si10H16 2.97e-03 7.60e-06 1.97e-06 1.91e-03 3.16e-06 3.16e-06Si5H12 1.58e-03 7.62e-06 1.88e-05 2.12e-07 5.50e-07 5.50e-07
SiO 7.61e-04 6.01e-06 3.89e-05 1.72e-07 1.29e-06 1.29e-06wathen100 2.66e-04 1.18e-05 2.43e-05 6.94e-08 3.05e-07 3.05e-07
Yin Zhang (RICE) EIGPEN February, 2013 31 / 39
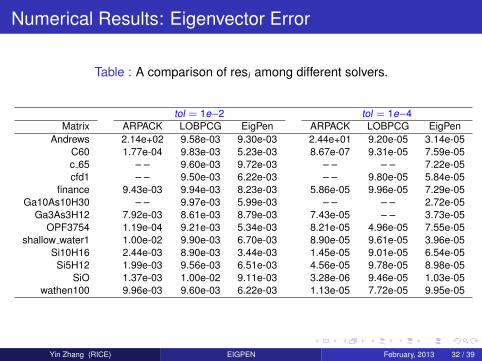
Numerical Results: Eigenvector Error
Table : A comparison of resi among different solvers.
tol = 1e−2 tol = 1e−4Matrix ARPACK LOBPCG EigPen ARPACK LOBPCG EigPen
Andrews 2.14e+02 9.58e-03 9.30e-03 2.44e+01 9.20e-05 3.14e-05C60 1.77e-04 9.83e-03 5.23e-03 8.67e-07 9.31e-05 7.59e-05c 65 – – 9.60e-03 9.72e-03 – – – – 7.22e-05cfd1 – – 9.50e-03 6.22e-03 – – 9.80e-05 5.84e-05
finance 9.43e-03 9.94e-03 8.23e-03 5.86e-05 9.96e-05 7.29e-05Ga10As10H30 – – 9.97e-03 5.99e-03 – – – – 2.72e-05
Ga3As3H12 7.92e-03 8.61e-03 8.79e-03 7.43e-05 – – 3.73e-05OPF3754 1.19e-04 9.21e-03 5.34e-03 8.21e-05 4.96e-05 7.55e-05
shallow water1 1.00e-02 9.90e-03 6.70e-03 8.90e-05 9.61e-05 3.96e-05Si10H16 2.44e-03 8.90e-03 3.44e-03 1.45e-05 9.01e-05 6.54e-05Si5H12 1.99e-03 9.56e-03 6.51e-03 4.56e-05 9.78e-05 8.98e-05
SiO 1.37e-03 1.00e-02 9.11e-03 3.28e-06 9.46e-05 1.03e-05wathen100 9.96e-03 9.60e-03 6.22e-03 1.13e-05 7.72e-05 9.95e-05
Yin Zhang (RICE) EIGPEN February, 2013 32 / 39
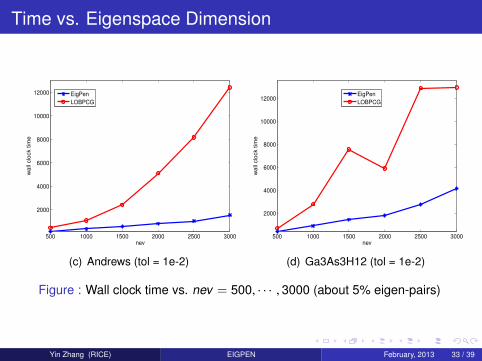
Time vs. Eigenspace Dimension
500 1000 1500 2000 2500 3000
2000
4000
6000
8000
10000
12000
nev
wa
ll clo
ck t
ime
EigPen
LOBPCG
(c) Andrews (tol = 1e-2)
500 1000 1500 2000 2500 3000
2000
4000
6000
8000
10000
12000
nev
wa
ll clo
ck t
ime
EigPen
LOBPCG
(d) Ga3As3H12 (tol = 1e-2)
Figure : Wall clock time vs. nev = 500, · · · , 3000 (about 5% eigen-pairs)
Yin Zhang (RICE) EIGPEN February, 2013 33 / 39
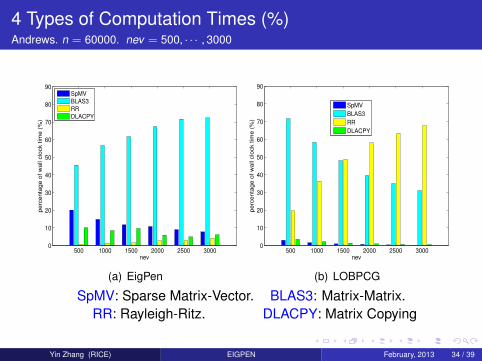
4 Types of Computation Times (%)Andrews. n = 60000. nev = 500, · · · , 3000
500 1000 1500 2000 2500 30000
10
20
30
40
50
60
70
80
90
nev
pe
rce
nta
ge
of
wa
ll c
lock t
ime
(%
)
SpMV
BLAS3
RR
DLACPY
(a) EigPen
500 1000 1500 2000 2500 30000
10
20
30
40
50
60
70
80
90
nevperc
enta
ge o
f w
all c
lock tim
e (
%)
SpMV
BLAS3
RR
DLACPY
(b) LOBPCG
SpMV: Sparse Matrix-Vector. BLAS3: Matrix-Matrix.RR: Rayleigh-Ritz. DLACPY: Matrix Copying
Yin Zhang (RICE) EIGPEN February, 2013 34 / 39
Parallel Speedup Factors
Recall: A single node of a Cray XE6 with 24 computing cores(two 12-core AMD “MagnyCours” 2.1-GHz processors)
Experiment setup:
Speedup-Factor for running on p cores:
Speedup-Factor(p) =run time using 1 corerun time using p cores
We run the 2 solvers for p = 2, 4, 8, 16, 24.
Yin Zhang (RICE) EIGPEN February, 2013 35 / 39
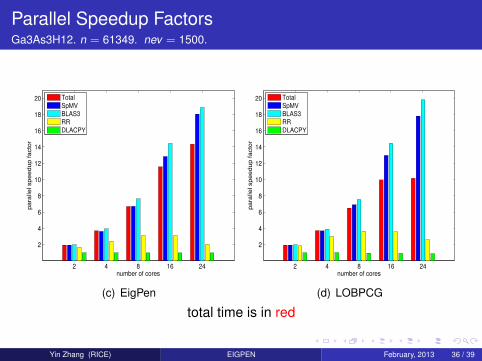
Parallel Speedup FactorsGa3As3H12. n = 61349. nev = 1500.
2 4 8 16 24
2
4
6
8
10
12
14
16
18
20
number of cores
pa
ralle
l sp
ee
du
p f
acto
r
Total
SpMV
BLAS3
RR
DLACPY
(c) EigPen
2 4 8 16 24
2
4
6
8
10
12
14
16
18
20
number of cores
pa
ralle
l sp
ee
du
p f
acto
r
Total
SpMV
BLAS3
RR
DLACPY
(d) LOBPCG
total time is in red
Yin Zhang (RICE) EIGPEN February, 2013 36 / 39

Preconditioning: Proof of Concept in Matlab
Preconditioned gradient method with pre-conditioner M ∈ Rn×n:
X j+1 = X j − αjM−1∇fµ(X j).
Matrix: c 65. n = 48066, nev = 500. M = LLT , L = ichol(A).
0 200 400 600 800 1000 120010
−3
10−2
10−1
100
101
102
103
104
105
||∇ f
µ(X
j )|| F
iteration
without preconditioning
(e) without preconditioning (Iter > 1200)
0 50 100 150 200 25010
−3
10−2
10−1
100
101
102
103
104
105
||∇ f
µ(X
j )|| F
iteration
with preconditioning
(f) with preconditioning (Iter < 300)
Figure : Gradient norm ‖∇fµ(X j)‖F Progress
Yin Zhang (RICE) EIGPEN February, 2013 37 / 39
Concluding Remarks
Why?
Eigenspace dimension tips balance of computation
Parallelism demands different thinking
How?
Trace-Penalty Model: penalty function is “exact”
Model yields fewer or even no saddle points
Orthogonalization and RR can be greatly reduced
What?
Efficient for moderate accuracy, numerically stable
Pre-conditioning can be effectively applied
BLAS3-rich, parallel scalability appears promising
Future: Enhancements/Refinements/Extensions
Yin Zhang (RICE) EIGPEN February, 2013 38 / 39

Thank you for your attention!
Yin Zhang (RICE) EIGPEN February, 2013 39 / 39