tinyos hardware
DESCRIPTION
TinyOS Hardware. Joe Polastre, Phil Levis, Rob Szewczyk, David Culler University of California, Berkeley Intel Research Berkeley. Motes. UC Berkeley Family of Motes. Mica2 and Mica2Dot. ATmega128 CPU Self-programming Chipcon CC1000 FSK Manchester encoding Tunable frequency - PowerPoint PPT PresentationTRANSCRIPT

MobiSys Tutorial, San Francisco
TinyOS Hardware
Joe Polastre,
Phil Levis, Rob Szewczyk, David CullerUniversity of California, Berkeley
Intel Research Berkeley

MobiSys Tutorial, San Francisco
Motes

MobiSys Tutorial, San Francisco
3
UC Berkeley Family of Motes

MobiSys Tutorial, San Francisco
4
Mica2 and Mica2Dot
• ATmega128 CPU– Self-programming
• Chipcon CC1000– FSK
– Manchester encoding
– Tunable frequency
• Lower power consumption
1 inch

MobiSys Tutorial, San Francisco
Wireless Robots
MobiSys Tutorial, San Francisco
6
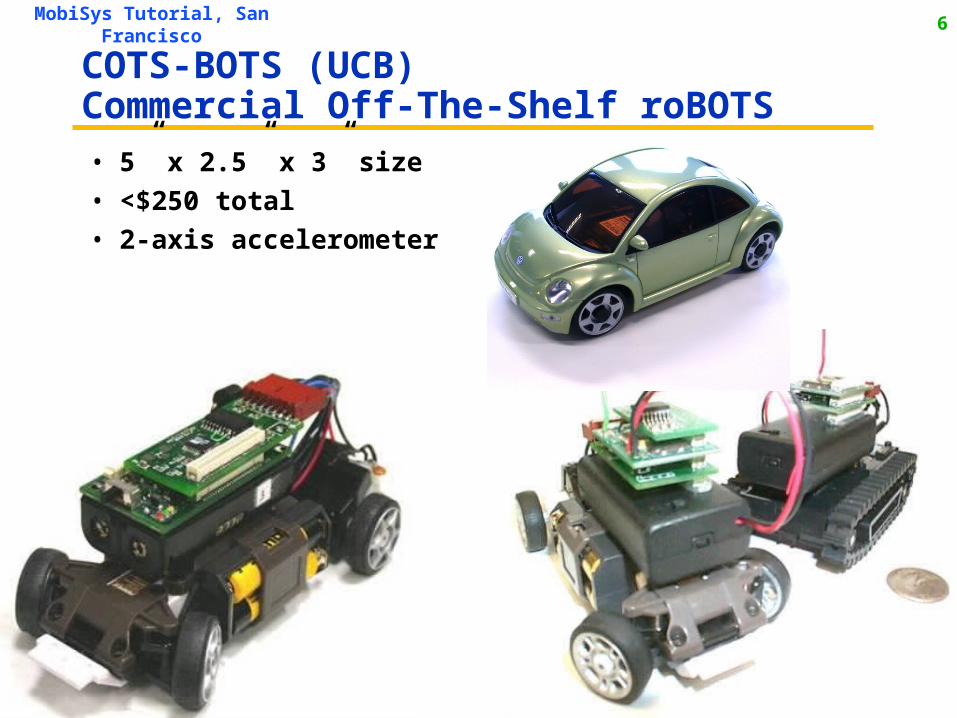
COTS-BOTS (UCB)Commercial Off-The-Shelf roBOTS• 5” x 2.5” x 3” size
• <$250 total
• 2-axis accelerometer

MobiSys Tutorial, San Francisco
7
Robomote (USC)• Less than 0.000047m3
• $150 each
• Platform to test algorithms for adaptive wireless networks with autonomous robots
MobiSys Tutorial, San Francisco
8
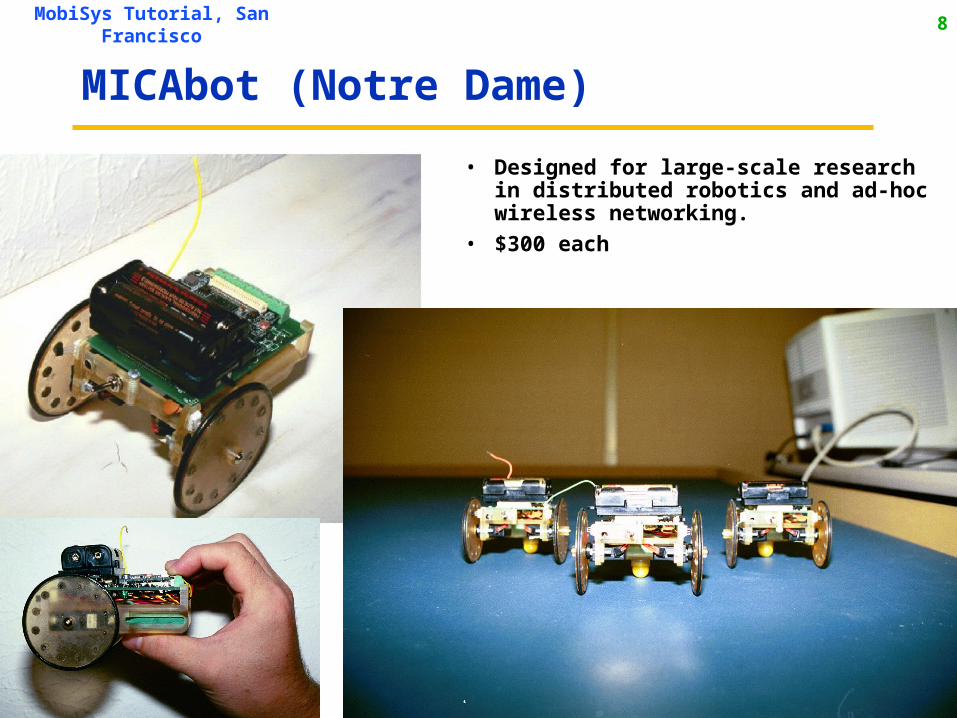
MICAbot (Notre Dame)
• Designed for large-scale research in distributed robotics and ad-hoc wireless networking.
• $300 each

MobiSys Tutorial, San Francisco
Sensorboards

MobiSys Tutorial, San Francisco
10
Basic Sensor Board
• Light (Photo)
• Temperature
• Prototyping space for new hardware designs

MobiSys Tutorial, San Francisco
11
Mica Interface Board
• 8 External Analog Inputs using Block Screw Terminals
– External Probes
• 8 channel digital I/O
• 1 relay driver
• On board 12-bit ADC– 0-2.5V, 0-3V, 0-5V
Ranges
• Stable 2.5V Reference
• 3V and 5V power
• Designed by UCLA CENS w/ Crossbow and UCB

MobiSys Tutorial, San Francisco
12
Mica Sensor Board
• Light (Photo)
• Temperature
• Acceleration– 2 axis
– Resolution: ±2mg
• Magnetometer– Resolution: 134G
• Microphone
• Tone Detector
• Sounder– 4.5kHz
MobiSys Tutorial, San Francisco
13
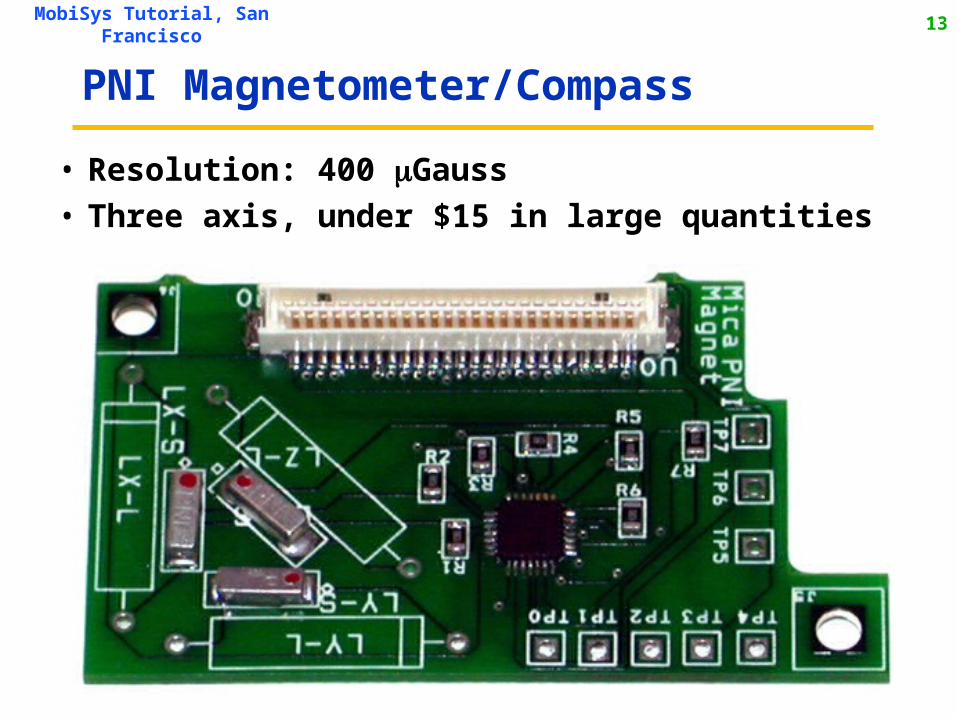
PNI Magnetometer/Compass
• Resolution: 400 Gauss
• Three axis, under $15 in large quantities
MobiSys Tutorial, San Francisco
14
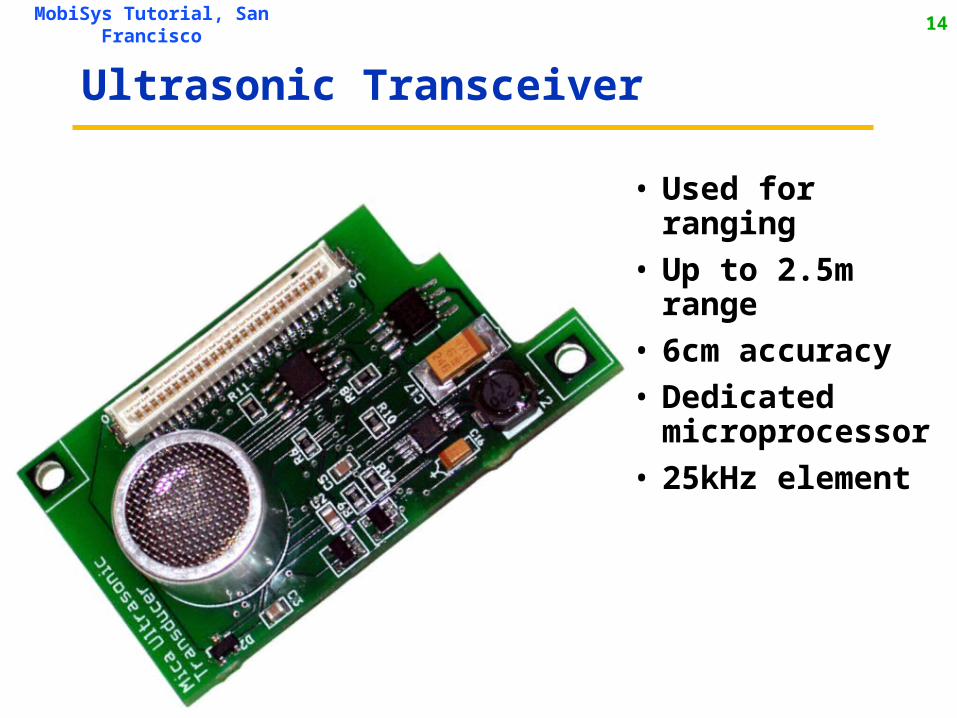
Ultrasonic Transceiver
• Used for ranging
• Up to 2.5m range
• 6cm accuracy
• Dedicated microprocessor
• 25kHz element

MobiSys Tutorial, San Francisco
15
Mica Weather Board
• Total Solar Radiation• Photosynthetically Active
Radiation– Resolution: 0.3A/W
• Relative Humidity– Accuracy: ±2%
• Barometric Pressure– Accuracy: ±1.5mbar
• Temperature– Accuracy: ±0.01oC
• Acceleration– 2 axis– Resolution: ±2mg
• Designed by UCB w/ Crossbow and UCLA
Revision 1.5
Revision 1.0

MobiSys Tutorial, San Francisco
16
Motor/Servo Board
• H Bridge
• Standard Motor Interface
• On-board microprocessor

MobiSys Tutorial, San Francisco
17
Connexus Interface
For More Information, See:Eric Paulos. “Connexus: An Evocative Interface” Workshop on “Ad hoc Communications and Collaboration in Ubiquitous Computing Environments” New Orleans, LA. Nov 2002.
• Interfaces a mote with:– Vibration Motors
– Super-bright LEDs
– Force Sensing
– Accelerometer
– Nitinol/Flexinol contractor“muscle wire”
– Peltier Junction
• Tool for HCI research using wireless devices

MobiSys Tutorial, San Francisco
18
In Manufacturing
• “Dot” sensorboards (1” diameter)– HoneyDot: Magnetometer
» Resolution: 134 Gauss
– Ultrasonic Transceiver
– Weather Station

MobiSys Tutorial, San Francisco
Enclosures

MobiSys Tutorial, San Francisco
20
Mica Environmental Enclosure

MobiSys Tutorial, San Francisco
21
Environmental Monitoring
MobiSys Tutorial, San Francisco
22
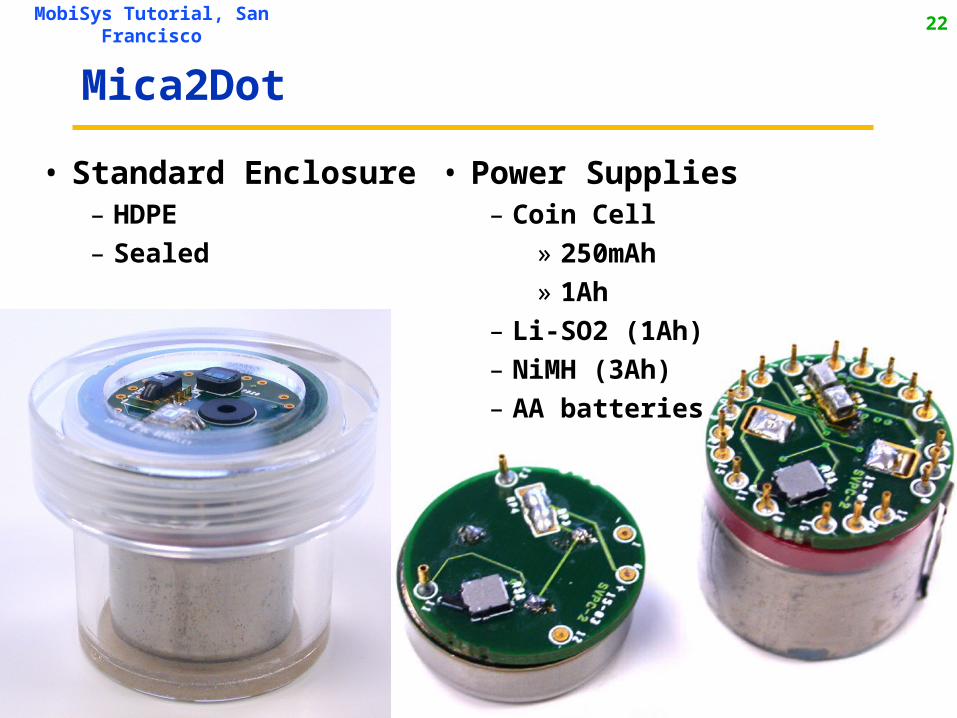
Mica2Dot
• Standard Enclosure– HDPE
– Sealed
• Power Supplies– Coin Cell
» 250mAh
» 1Ah
– Li-SO2 (1Ah)
– NiMH (3Ah)
– AA batteries