the synthesis of the planar linkages with symmetrical ... · the systematic methodology can be...
TRANSCRIPT

THE SYNTHESIS OF THE PLANAR LINKAGES WITH SYMMETRICAL CONFIGURATIONS
Chia-Chun Chu and Deng-Maw LuDepartment of Mechanical Engineering, Southern Taiwan University of Science and Technology,
Tainan, Taiwan, R.O.C.E-mail: [email protected]
IMETI 2015, SG5011_SCINo. 16-CSME-62, E.I.C. Accession 3948
ABSTRACTThe mechanisms that employ symmetrical configurations can be found in the steering mechanisms, doubleopen refrigerator, roof boxes, and double open windows, among others. They are useful for some specialapplications with kinematic symmetry. There have been studies about the linkage synthesis, especiallyin the research of planar closed chains, from as early as 1960s. However, no study has focused on thesymmetry of planar linkages. Thus, the purpose of this paper is to present a methodology to synthesizethe configurations of planar linkages. The systematic methodology can be divided into structure synthesis,configuration synthesis and results produced from three major processes. Finally, four suitable results of upto six-bar linkages can be obtained, for example. The four results include one four-bar linkage and threesix-bar linkages.
Keywords: synthesis; symmetrical configurations; planar linkages.
SYNTHÈSE DES LIAISONS PLANES AVEC CONFIGURATIONS SYMÉTRIQUES
RÉSUMÉOn peut trouver des mécanismes à configurations symétriques dans les mécanismes de direction, les réfri-gérateurs à doubles portes, des coffres pour les toits de voiture, et des fenêtres à guillotines doubles, etc.Ils sont utiles dans certaines applications spéciales comportant des symétries cinématiques. Bien que dès ledébut des années 60, il y a eu beaucoup de littérature sur la synthèse des liaisons mécaniques, spécialementdans la recherche sur les chaînes planes fermées, toutefois dans aucun ouvrage on a mis l’emphase sur lasymétrie des liaisons planes. Ainsi, le propos de cet article est de présenter une méthodologie pour synthé-tiser les configurations des liaisons planes. La méthodologie peut être divisée en synthèse de la structure, etsynthèse de configuration ; le résultat obtenu a produit trois processus majeurs. Par exemple, on peut obtenirjusqu’à quatre résultats de liaisons à six barres. Les quatre résultats incluent une liaison à quatre barres ettrois liaisons à six barres.
Mots-clés : synthèse; configuration symétriques; liaisons planes.
Transactions of the Canadian Society for Mechanical Engineering, Vol. 40, No. 5, 2016 971

Fig. 1. The representation of links and joints for structure synthesis.
1. INTRODUCTION
The mechanisms that employ symmetrical configurations can be found in the steering mechanisms, doubleopen refrigerator, roof boxes, and double open windows, among others. They are useful for some specialapplications with kinematic symmetry. Almost all the existing mechanisms are structured by spatial mech-anisms, open chains, or variable chains. This complex symmetrical mechanisms are easy to configure byintuitive design, but they are not stable and reliable.
After several decades, there are many studies on structural synthesis of planar linkages. However, there isless literature on the subject. From as early as the 1960s, there are many studies about the linkage synthesis[1–4]. In early 1965, Johnson and Towfigh used the concept of equivalent for synthesizing planar closedchains using different mechanisms [5]. Subsequently, in 1979, Freudenstein and Maki proposed the conceptof separation of structure and function and provide a synthesis methodology for closed chains [6]. In 2010,Chu et al. [7] designed a new central transmission device for a four-wheel steering system using the planarsymmetrical linkages.
Thus, the purpose of this paper is to present a systematic synthesis methodology for planar linkages withsymmetrical configurations. A practical prototype will be manufactured. Finally, four suitable results canbe obtained [7].
2. REPRESENTATION
The traditional representations must to be modified to be suitable for the proposed method and it shouldbe capable of representing the symmetrical characteristics clearly. The systematic methodology can bedivided into structure synthesis, configuration synthesis and results produced from three major processes.The processes of structure synthesis and configuration synthesis need modified representations.
The modified representation for structure synthesis process is shown in Fig. 1. The links are representedby thin/thick lines or polygons. Figure 1(a) represents the binary links, Fig. 1(b) represents the ternarylink, Figs. 1(c, d) represent the fixed links, and Figs. 1(e, f) represents the input/output links by thick lines.Figure 2 is the representation of mechanism of the structure synthesis process.
The modified representation of configuration synthesis process is shown in Fig. 3. The symmetrical axisis represented by the centerline. Figures 3(a, b) represents the binary and ternary links on the symmetricalaxis, Figs. 3(c, d) represents the links which are adjacent to the fixed link on symmetrical axis, Fig. 3(d)represents the input/output links by think lines, and Fig. 3(e) represents the overlap links on symmetrical
972 Transactions of the Canadian Society for Mechanical Engineering, Vol. 40, No. 5, 2016

Fig. 2. The mechanism in the process structure synthesis.
Fig. 3. The representation of links and joints for configuration synthesis.
axis clearly with the help of lines. Figure 4 is the representation of mechanism of the structure synthesisprocess.
3. DESIGN METHOD
Based on the configuration characteristics of the symmetrical mechanisms, the design method is presentedand its flowchart is given in Fig. 5. The design concept in flowchart can be divided into structure synthesis,configuration synthesis and results produced by three major processes.
From the structure synthesis process, the number of links, number of joints, the fixed link, the input link,output link, and other non-geometric features can be determined. The process involves choosing a kinematicchain, identifying the fixed link, and identifying the input/output links in three steps, as shown in Fig. 5 (lines1–4).
The configuration synthesis process is separated into two steps, i.e. setting fixed link on symmetry lineand checking level n symmetry, as shown in Fig. 5, lines 5–9.
Transactions of the Canadian Society for Mechanical Engineering, Vol. 40, No. 5, 2016 973

Fig. 4. The mechanism in the process of configuration synthesis.
Fig. 5. Design flowchart.
974 Transactions of the Canadian Society for Mechanical Engineering, Vol. 40, No. 5, 2016
The result is derived from the process involving three steps, i.e. removing rigid chains and redundantloops, checking isomorphism and adding to the database, as shown in Fig. 5, lines 10–13.
4. EXAMPLE
In accordance with the design flowchart, the symmetrical planar linkages with four and six links are synthe-sized. The example is demonstrated in the following sections.
4.1. Structure SynthesisThe structure synthesis process can be classified into choosing a kinematic chain, identifying the fixed link,and identifying the input/output links in three steps, as shown in Fig. 5. The detailed steps are illustrated asfollows.
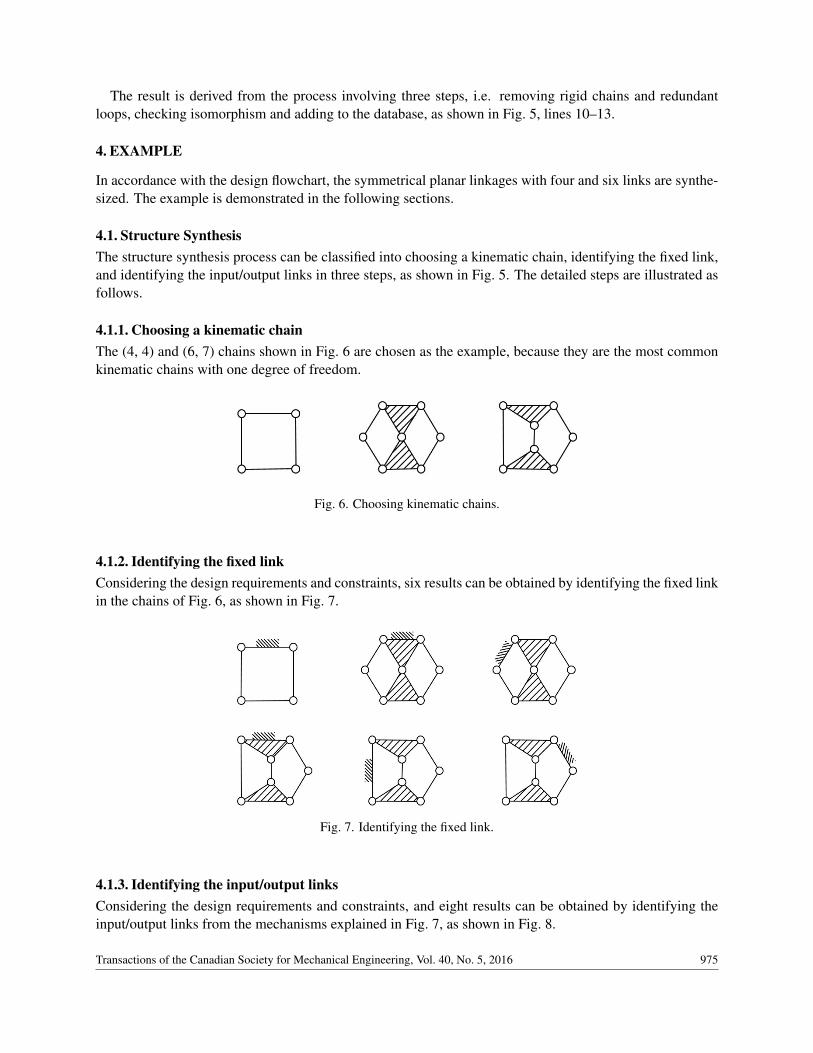
4.1.1. Choosing a kinematic chainThe (4, 4) and (6, 7) chains shown in Fig. 6 are chosen as the example, because they are the most commonkinematic chains with one degree of freedom.
Fig. 6. Choosing kinematic chains.
4.1.2. Identifying the fixed linkConsidering the design requirements and constraints, six results can be obtained by identifying the fixed linkin the chains of Fig. 6, as shown in Fig. 7.
Fig. 7. Identifying the fixed link.
4.1.3. Identifying the input/output linksConsidering the design requirements and constraints, and eight results can be obtained by identifying theinput/output links from the mechanisms explained in Fig. 7, as shown in Fig. 8.
Transactions of the Canadian Society for Mechanical Engineering, Vol. 40, No. 5, 2016 975
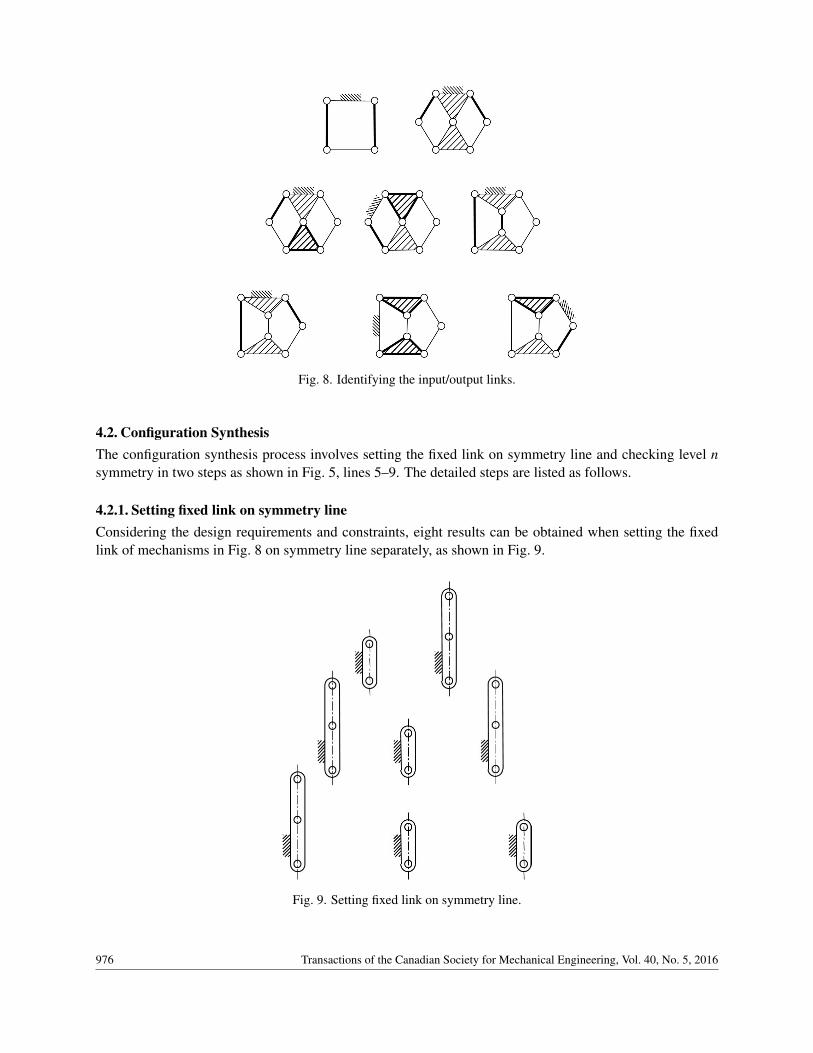
Fig. 8. Identifying the input/output links.
4.2. Configuration SynthesisThe configuration synthesis process involves setting the fixed link on symmetry line and checking level nsymmetry in two steps as shown in Fig. 5, lines 5–9. The detailed steps are listed as follows.
4.2.1. Setting fixed link on symmetry lineConsidering the design requirements and constraints, eight results can be obtained when setting the fixedlink of mechanisms in Fig. 8 on symmetry line separately, as shown in Fig. 9.
Fig. 9. Setting fixed link on symmetry line.
976 Transactions of the Canadian Society for Mechanical Engineering, Vol. 40, No. 5, 2016

Fig. 10. Checking Level 1 symmetry.
Fig. 11. Checking Level 2 symmetry.
4.2.2. Checking level n symmetryStarting from the fixed link, symmetry of links and joints is checked sequentially. The results can be obtainedwhen checking level 1 symmetry of Fig. 9 separately, as shown in Fig. 10.
The results can be obtained when checking level 2 symmetry of the mechanisms displayed in Fig. 10separately, as shown in Fig. 11.
The results can be obtained when checking level 3 symmetry of Fig. 11 separately, as shown in Fig. 12.
Transactions of the Canadian Society for Mechanical Engineering, Vol. 40, No. 5, 2016 977

Fig. 12. Checking Level 3 symmetry.
For (4, 4) and (6, 7) chains, three-level checking can complete the symmetry checked.
Fig. 13. Suitable results.
4.3. ResultsThe results are obtained after removing redundant loops, checking isomorphism, and adding to the databasein three steps, as shown in Fig. 5, lines 10–13.
978 Transactions of the Canadian Society for Mechanical Engineering, Vol. 40, No. 5, 2016

After removing redundant loops and checking isomorphism, Figs. 12(c–e) and 12(g) are removed fromthe results. Finally, four suitable results can be obtained, as shown in Fig. 13(a), in which there is a four-barlinkage and Figs. 13(b–d) show six-bar linkages.
5. CONCLUSIONS
A methodology is presented to synthesize the configurations of planar linkages with symmetrical configu-rations. The systematic methodology can be divided into structure synthesis, configuration synthesis andresult produced from three major processes.
The structure synthesis process is used to determine the number of links, number of joints, the fixedlink, the input link, output link, and other non-geometric features. The configuration synthesis process isseparated into setting fixed link on symmetry line and checking level n symmetry. The results are producedafter removing rigid chains and redundant loops, checking isomorphism and adding to the database.
Finally, four suitable results of up to six-bar linkages can be obtained, for example. The four resultsinclude one four-bar linkage and three six-bar linkages.
REFERENCES
1. Freudenstein, F. and Dobrjanskyj, L., “On a theory for the type synthesis of mechanisms”, in Proceedings of the11th International Congress of Applied Mechanics, Springer, Berlin, pp. 420–428, 1964.
2. Crossley, F.R.E., “The permutations of kinematic chains of eight member or less from the graph-theoretic view-point”, in Developments in Theoretical and Applied Mechanisms, Vol. 2, W.A. Shaw (Ed.), Pergamon Press,Oxford, pp. 467–486, 1965.
3. Dobrjanskyj, L. and Freudenstein, F., “Some applications of graph theory to the structural analysis of mecha-nisms”, ASME Transactions, Journal of Engineering for Industry, Vol. 89B, pp. 153–158, 1967.
4. Woo, L.S., “Type synthesis of plane linkages”, ASME Transactions, Journal of Engineering for Industry, Vol.89B, pp. 159–172, 1967.
5. Johnson, R.C. and Towfigh, K., “Application of number synthesis to practical problems in creative design”, ASMEPaper, No. 65-WA-MD9, 1965.
6. Freudenstein, F. and Maki, E.R., “The creation of mechanisms according to kinematic structure and function”,Journal of Environment and Planning B, Vol. 6, pp. 11–23, 1979.
7. Chu, C.C., Lu, D.M., Chang, C.C., “Central transmission device for a four-wheel steering system”, U.S. Patent8,100,422 B1, January 24, 2012.
Transactions of the Canadian Society for Mechanical Engineering, Vol. 40, No. 5, 2016 979