the hunveyor-4 a hungarian, student made space probe hudoba, györgy obuda university alba regia...
TRANSCRIPT

The HUNVEYOR-4a Hungarian, student made space probe
Hudoba, GyörgyObuda University
Alba Regia Technical Faculty
MAFIOK 2014 Pécs, 2014. augusztus 25-27.

Outline• Short introduction – where do I came from• What does HUNVEYOR mean?
– Aims, history and motivation– The structure of the HUNVEYOR-4
• The HUNVEYOR on the „Mars”– Preparing for the Mars2013– Experiments and results– Conclusions– Further plans for improvements


HUNVEYORHungarian UNiversity SurVEYOR
HUNVEYOR-1 ELTE, Budapest (1997.)HUNVEYOR-2 JPTE, Pécs HUNVEYOR-3 BDTF, SzombathelyHUNVEYOR-4 Székesfehérvár (2001.)
An educational space probe

Surveyor-7
Launch: January 7., 1968. 06:30:00 UTC Landing: january 10., 1968. 01:05:36 UTC Rocket: Atlas-Centaur Flying time: 65 hPosition: 41.01°S 348.59°ELanding mass: 305.7 kg
<= Surveyor 7, January 10th 1968.

„We choose to go to the Moon!”
Space race
Rice University, September 1962.

The 20th century gave a big boost for technology
for our everyday life
Some facts in 2014• We are living in the 21th century,
in the so called Space Age• We are more and more technology dependent (computer, smart phone, etc.)
At the same time • The interest is going downhill about the
science and engineering • This is a world wide phenomena• Things are going from bad to worse

The HUNVEYOR project is our answer to this challenge

Aims The primary aim of the HUNVEYOR project at our Institute is:
to form an attractive, meaningful and long term framework for the research and development
carried out by our students.
• gain interest among young people
• offering subjects for diploma and other project works
• obtaining skills in engineering, (self)organization and realization of products
• get acquainted with the latest technology
• serve as reference in job hunting

Space Probe Control Unit
INTERNETINTERNET
Client
Webcams
I2C bus
I2C Device
Control Unit
Interface
HUSAR
Interface
Analoguemodules
Interface
EMU
XML-RPC calls
Terrestial Control Unit
SQL
XML-RPC client
WEB server
(HTML&
PHP)XML-RPC
server
I/O komm. module
USB
The structure of the
HUNVEYOR-4
Sola
r pan
el
http://hunveyor.arek.uni-obuda.hu
IP: 193.224.148.9
PPM
Stepper motors.... etc
Radio link... etc.
Vibration & other senzors

Devices
wind speed, direction
and temperature
gas, humidity, air pressure, noise, lightning, light intensity and
spectral intensity
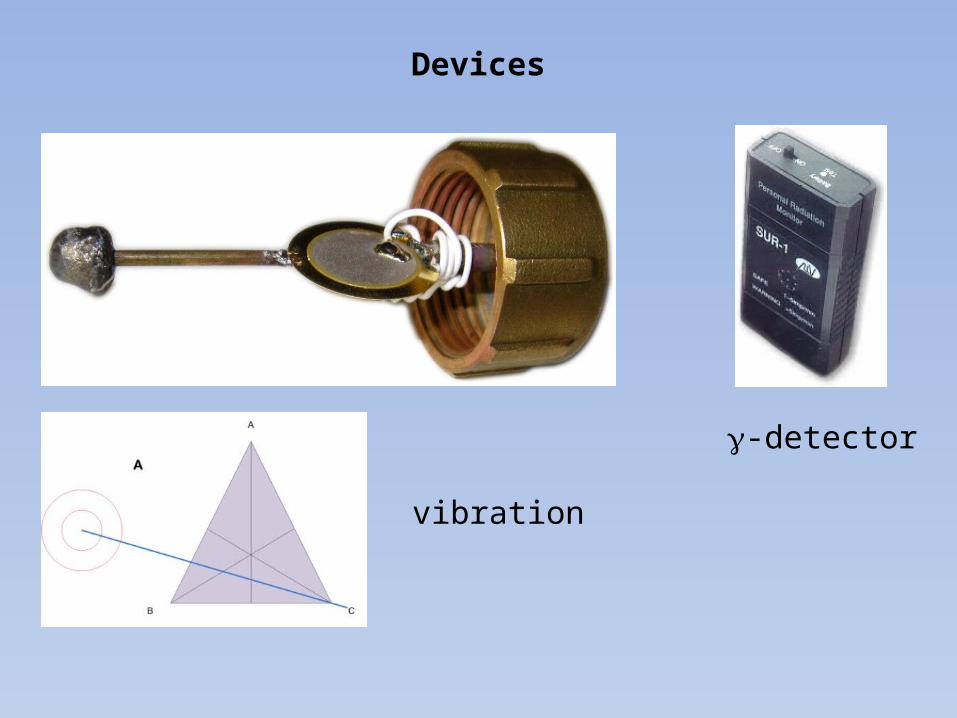
Devices
vibration
g-detector

webcameras

Radio controlled rower (HUSAR)


Devices

Devices
Solar panel (with intelligent
charger, battery pack and
equatorial Sun tracking mechanism)
and a
dish (for 2.4 GHz wlan communication)

Ready to Mars?

(contact) Problems at the start
Problem• #1 – The 2.4 GHz wlan did
not worked
Root cause• During the transportation
one card in one of the access point went loose (bad contact)

(contact) Problems at the start
Problem• #1 – The 2.4 GHz wlan did
not worked
• #2 – The Sun tracking unit has failed
Root cause• During the transportation
one card in one of the access point went loose (bad contact)
• In the final hurry by an accidental shortcut the driver tranzistor has died (insulation was missing, unwanted contact)

Mars2013 experiments
Testing Hunveyor-4 portability, and ability for
continuous work
Intention Result
The HUNVEYOR survived the transportationWe successfully connect ed to the device and could retrieve some data. We have 619 data sets from the meteorological stationUnfortunately after a few days the controller failed
• Camera observations of the quality of surface events and forms
- rock surface textures- windswept sandy surface and wind transport (dunes, lee forms) - dust devils- monitoring the magnetic particle content of the dust
- robotic arm observation in working: sand and smaller clast and pebble manipulations
• Robotic arm observation in working: sand and smaller clast and pebble manipulations
• Stereo-camera observations for guiding the sample collecting rower
Intention Result
After a few days we lost the USB devices

• Instrumental measurements:- monitoring insolation- analyzing spectral composition of the light and its daily changes- monitoring noise level- monitoring humidity- monitoring temperature in different places (outside, under the hood, processor)- monitoring wind speed and direction changes- monitoring high energy particle radiation
Intention Result
After a few days we lost the USB devices
Root cause:Flash memory erased
in the IIC/USB controller
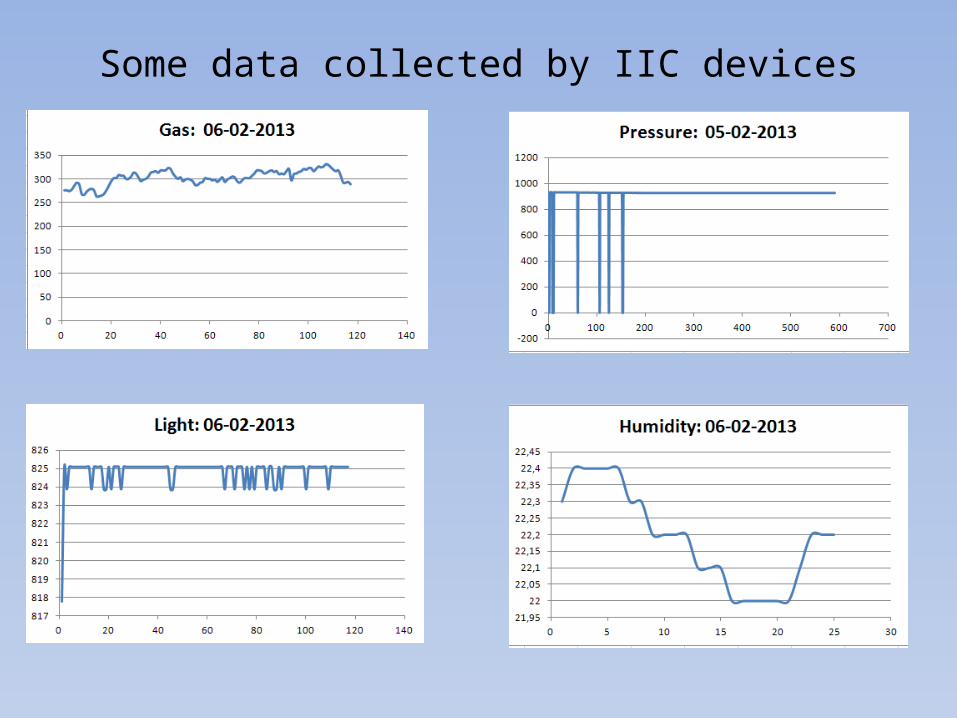
Some data collected by IIC devices

Some data collected by IIC devices
2013.02.06 10:55:13 - 2013.02.06 12:53:14

• Testing the soil collecting rower: (mobility, range, radio communication)
• Rough spectral analysis of the soil
• Data collection, transmission and storage in a data base for later retrieval and analysis
Intention Result
Failed, because we lost the USB devices
Failed, because we lost the USB devices
We have 619 data sets from the meteorological
station

• Ttesting our new concept: data collection using an experimental dynamic configurable sensor network
Intention Result
We have some data sets from the small sensors,
but due to the USB failure the process
interrupted

Small sensors and data loggers (MOTs)
lightair pressuretemperaturehumidity
3D accelerometermagnetic field sensor

Our concept
Data collecing with a rowerSophisticated, but
heavy, expensivedata at one time from one site only
Data collecing with MOTs, spreading out during landing even thousends
simple, light, inexpensivedata at the same time from big area

Uptime and Internet Connection
The solar panel and the battery pack worked excellent, so the HUNVEYOR could have been continuously up more
than 24 hours

At home again

Electrostatic dust
accumulation
Upper side
and from below



ConclusionsDespite of the hardware failure, we consider the
field test as a success, because the space probe was not designed to operate in harsh
environment, and performed better, than we expected.
Further plans for improvementsFor a more robust solution we plan to redesign
the probe for Raspberry PI.

Thank you for your kind attention