the car-2-car communication consortium · • glosa 1.0 • in-vehicle information • roadworks w...
TRANSCRIPT

The Car-2-Car Communication Consortium Roadmaps beyond Day-1
10.03.2016

C2C-CC – Guiding principles for V2X roadmaps
Focus on information exchange (between traffic participants) Cooperate on providing information
Provide clearly defined information (standards) Use commonly agreed air-interfaces (WLANp) Focus on localized dissemination patterns (geo-areas) The information provided has to build “on top of each other”
Compete in capitalizing on the information (applications)
Each traffic participant can (freely) use the received information Automatic driving functions are enhanced
2 10.03.2016

AG – Guiding principles for V2X roadmaps
3 10.03.2016

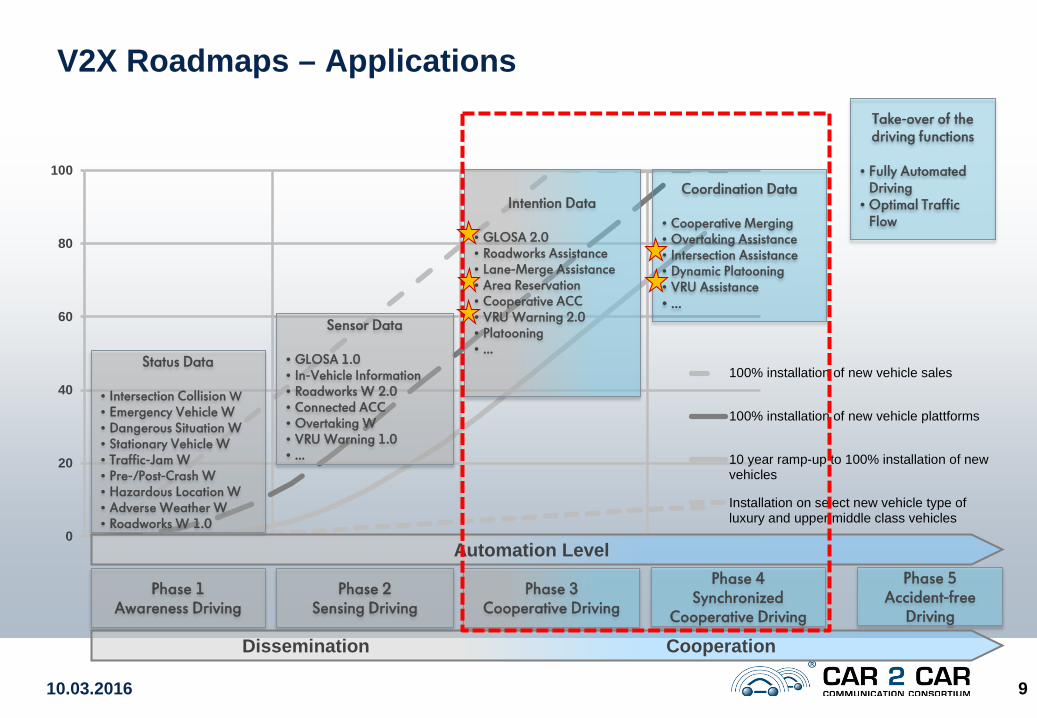
V2X Roadmaps – Applications
0
20
40
60
80
100
100% installation of new vehicle sales
100% installation of new vehicle plattforms
10 year ramp-up to 100% installation of newvehicles
Installation on select new vehicle type ofluxury and upper middle class vehicles
Take-over of the driving functions
• Fully Automated
Driving • Optimal Traffic
Flow
Status Data
• Intersection Collision W • Emergency Vehicle W • Dangerous Situation W • Stationary Vehicle W • Traffic-Jam W • Pre-/Post-Crash W • Hazardous Location W • Adverse Weather W • Roadworks W 1.0
Sensor Data
• GLOSA 1.0 • In-Vehicle Information • Roadworks W 2.0 • Connected ACC • Overtaking W • VRU Warning 1.0 • ...
Intention Data • GLOSA 2.0 • Roadworks Assistance • Lane-Merge Assistance • Area Reservation • Cooperative ACC • VRU Warning 2.0 • Platooning • …
Coordination Data • Cooperative Merging • Overtaking Assistance • Intersection Assistance • Dynamic Platooning • VRU Assistance • …
Phase 1 Awareness Driving
Phase 2 Sensing Driving
Phase 3 Cooperative Driving
Phase 5 Accident-free
Driving
Phase 4 Synchronized
Cooperative Driving
Dissemination Cooperation
4
Automation Level
10.03.2016

V2X Roadmaps – Applications
0
20
40
60
80
100
100% installation of new vehicle sales
100% installation of new vehicle plattforms
10 year ramp-up to 100% installation of newvehicles
Installation on select new vehicle type ofluxury and upper middle class vehicles
Take-over of the driving functions
• Fully Automated
Driving • Optimal Traffic
Flow
Status Data
• Intersection Collision W • Emergency Vehicle W • Dangerous Situation W • Stationary Vehicle W • Traffic-Jam W • Pre-/Post-Crash W • Hazardous Location W • Adverse Weather W • Roadworks W 1.0
Sensor Data
• GLOSA 1.0 • In-Vehicle Information • Roadworks W 2.0 • Connected ACC • Overtaking W • VRU Warning 1.0 • ...
Intention Data • GLOSA 2.0 • Roadworks Assistance • Lane-Merge Assistance • Area Reservation • Cooperative ACC • VRU Warning 2.0 • Platooning • …
Coordination Data • Cooperative Merging • Overtaking Assistance • Intersection Assistance • Dynamic Platooning • VRU Assistance • …
Phase 1 Awareness Driving
Phase 2 Sensing Driving
Phase 3 Cooperative Driving
Phase 5 Accident-free
Driving
Phase 4 Synchronized
Cooperative Driving
Dissemination Cooperation
5
Automation Level
10.03.2016

6
Day
0
10.03.2016

7
Phase 1 Status Data position, speed, events, …
Day
1
10.03.2016

8
Phase 1 Status Data
Phase 2 Sensor Data
+
position, speed, events, …
objects, field-of-view, …
Day
2
10.03.2016
V2X Roadmaps – Applications
0
20
40
60
80
100
100% installation of new vehicle sales
100% installation of new vehicle plattforms
10 year ramp-up to 100% installation of newvehicles
Installation on select new vehicle type ofluxury and upper middle class vehicles
Take-over of the driving functions
• Fully Automated
Driving • Optimal Traffic
Flow
Status Data
• Intersection Collision W • Emergency Vehicle W • Dangerous Situation W • Stationary Vehicle W • Traffic-Jam W • Pre-/Post-Crash W • Hazardous Location W • Adverse Weather W • Roadworks W 1.0
Sensor Data
• GLOSA 1.0 • In-Vehicle Information • Roadworks W 2.0 • Connected ACC • Overtaking W • VRU Warning 1.0 • ...
Intention Data • GLOSA 2.0 • Roadworks Assistance • Lane-Merge Assistance • Area Reservation • Cooperative ACC • VRU Warning 2.0 • Platooning • …
Coordination Data • Cooperative Merging • Overtaking Assistance • Intersection Assistance • Dynamic Platooning • VRU Assistance • …
Phase 1 Awareness Driving
Phase 2 Sensing Driving
Phase 3 Cooperative Driving
Phase 5 Accident-free
Driving
Phase 4 Synchronized
Cooperative Driving
Dissemination Cooperation
9
Automation Level
10.03.2016

10
Phase 1 Status Data
Phase 2 Sensor Data
Phase 3 Intention Data
+
+
position, speed, events, …
objects, field-of-view, …
intentions, trajectories …
Day
3
10.03.2016

11
Phase 1 Status Data
Phase 2 Sensor Data
Phase 3 Intention Data
Phase 4 Coordination Data
+
+
+
position, speed, events, …
objects, field-of-view, …
intentions, trajectories …
synchronized trajectories
Day
4
10.03.2016

12
Phase 1 Status Data position, speed, events, …
10.03.2016
Day
1

13
Phase 1 Status Data
Phase 2 Sensor Data
+ position, speed, events, …
objects, field-of-view, …
10.03.2016
Day
2

14
Phase 1 Status Data
Phase 2 Sensor Data
Phase 3 Intention Data
+
+
position, speed, events, …
objects, field-of-view, …
intentions, trajectories …
10.03.2016
Day
3

15
Phase 1 Status Data
Phase 2 Sensor Data
Phase 3 Intention Data
Phase 4 Coordination Data
+
+
+
position, speed, events, …
objects, field-of-view, …
intentions, trajectories …
synchronized trajectories
10.03.2016
Day
4

What could be the benefits of connected and automated driving? As compiled from discussions within the Amsterdam Group
Vehicle manufacturers • Optimal navigation through optimal information A very exact prognosis of the traffic • Enable automatic driving over large parts of individual trips Very exact positioning (absolute and relative) Increased availability (also on snowy roads, less perfect markings) Infrastructure operators • Reduce maintenance costs • Optimize the capacity and usage of their network Digital traffic signs / Digital data collection IRSs could complement less-perfect markings Increased availability (also on snowy roads, less perfect markings)
16 10.03.2016

V2X Roadmaps – Technology R
elea
se /
time
Phase 1 Phase 2 Phase 3 Phase 4
domain CAM DENM
GN-SHB GN-GBC
single-channel
G5A-CCH Day1 CC
SPAT MAP IVI
Platoon Management Msg.
Parking Mng. Msg.
GN-Unicast GN6
Intention Msg.
Automatic-driving Messages
G5A-SC1 G5A-SC2
G5B-SC3 G5B-SC4 G5D-SC5
dual-channel switched-mode
GN-Groupcast
Segmentation/Reassembly
multi-channel CC
I2V Coop. Messages
Collective Perception Msg. GN/BTP + QoS
Advanced FWD Misbehaviour detection
SAM
Day-1 PKI
Sec-Maintainability
PC-change rules
dual-channel CC
Simultaneous dual-channel
Simultaneous multi-channel
Dis
sem
inat
ion
Coo
pera
tion
Data Streaming
17
Platoon Control Msg.
Collective Positioning Msg.
Electronic Horizon Msg.
Digital Inspection Msg.
60 GHz Comm.
CAMv2
Auto
mat
ion
Leve
l
IVI-Platoon Extensions
Symmetric Crypto.
10.03.2016
Misbehaviour detection

Thank You! Questions?