terrasolid ltd. software for lidar processing -...
TRANSCRIPT

Terrasolid Ltd.Software for LiDAR processing


Terrasolid Ltd.Privately held company based in Finland
Founded in 1989
12 employees
Last fiscal year revenues 4,5 M€
Terrasolid Ltd.
23+ years of software development onMicroStation and other Bentley applications
15+ years of point cloud software development
Bentley Platform Partner

Terrasolid Ltd.Over 4000 TerraScan licenses sold
Customers in over 90 countries
Global market leader in airborne and mobilelaser scanned point cloud processing with anestimated 85% market share

GISware Integro Ltd.
• Terrasolid representative in Russia• Founded in 1999• 25 employees in Moscow and Krasnodar• Core activity is software development• Sales, support, training, and consultancy• Managing director
• Sergey Nikolaev, [email protected]
• Contact for Terrasolid issues• Denis Antoshkin, [email protected]
http://gisw.ru
https://gisw.ru/terrum/

Terrasolid products for LiDAR
TerraScan – Classify and handle point cloudsTerraMatch – Match multiple flight / drive passesTerraPhoto – True ortho production and texturingTerraModeler – DTM and contour productionTerraSurvey – Field control measurements
Terrasolid products for Infrastructure
TerraStreet – 3D street design packageTerraPipe – 3D sewage and waterpipe designTerraGas – 3D natural gas pipeline designTerraHeat – 3D district heating designTerraBore – 3D handling of geotechnical drills
Currently supported platforms
MicroStation V8i or V8 2004 EditionBentley MapBentley Map PowerViewBentley PowerCivilBentley PowerCivil for Country
Laser scanning
Laser scanning
TerrestialStatic tripod
AirborneAeroplaneHelicopter
MobileCarTrain
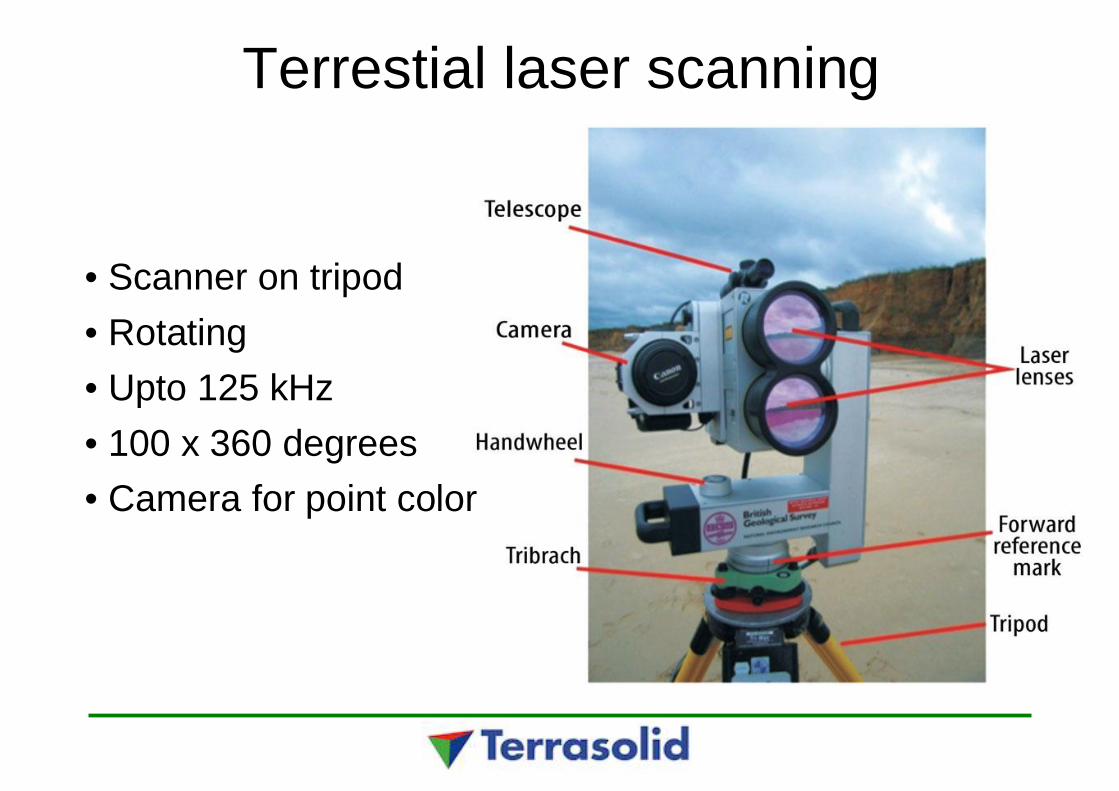
Terrestial laser scanning
• Scanner on tripod• Rotating• Upto 125 kHz• 100 x 360 degrees• Camera for point color
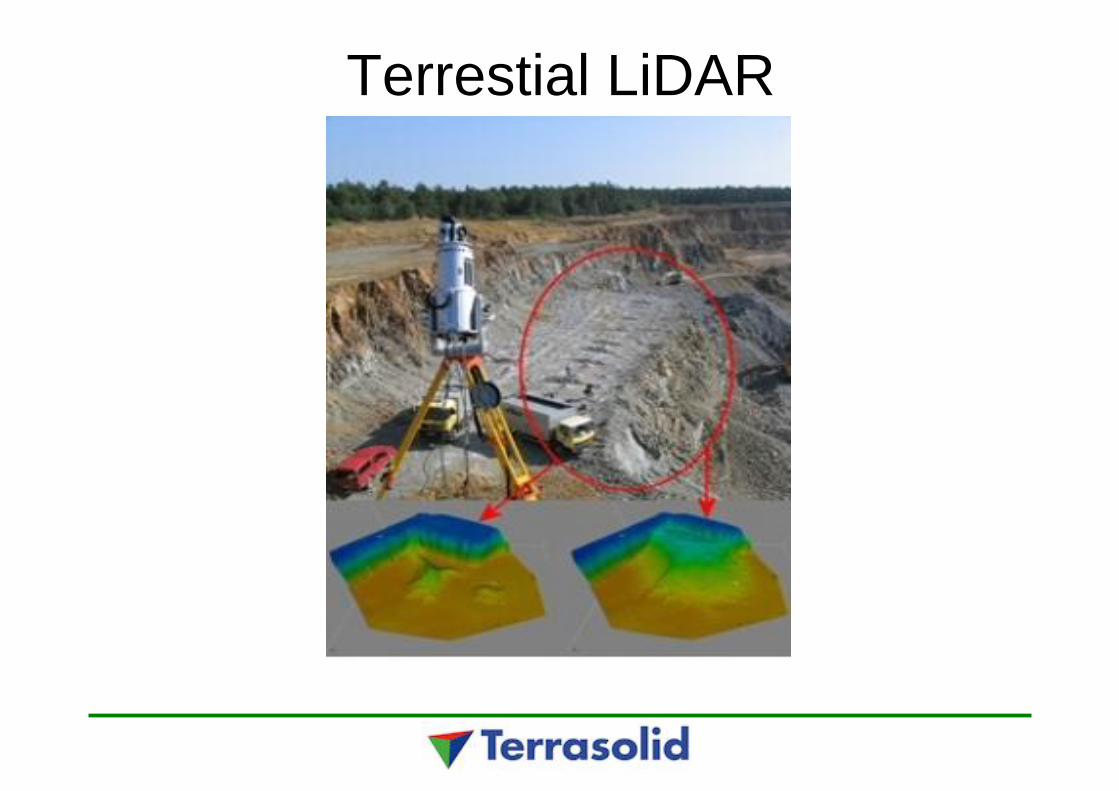
Terrestial LiDAR
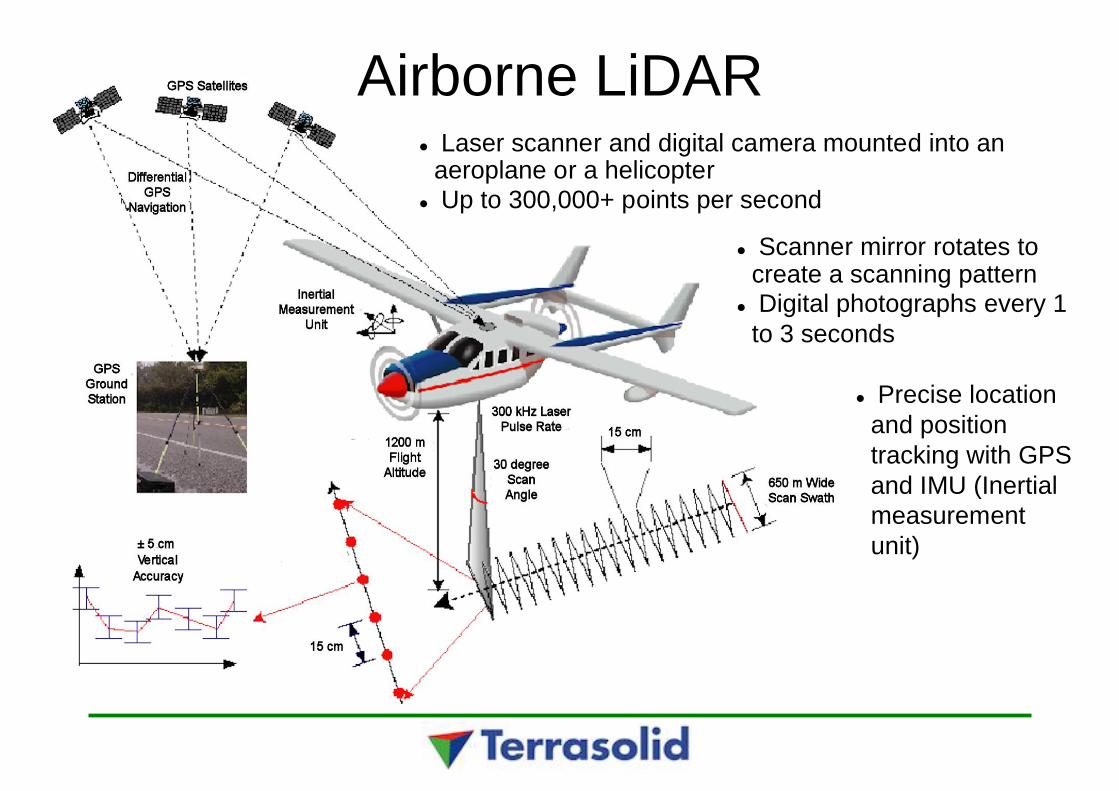
Airborne LiDARLaser scanner and digital camera mounted into an
aeroplane or a helicopterUp to 300,000+ points per second
Scanner mirror rotates tocreate a scanning patternDigital photographs every 1
to 3 seconds
Precise locationand positiontracking with GPSand IMU (Inertialmeasurementunit)
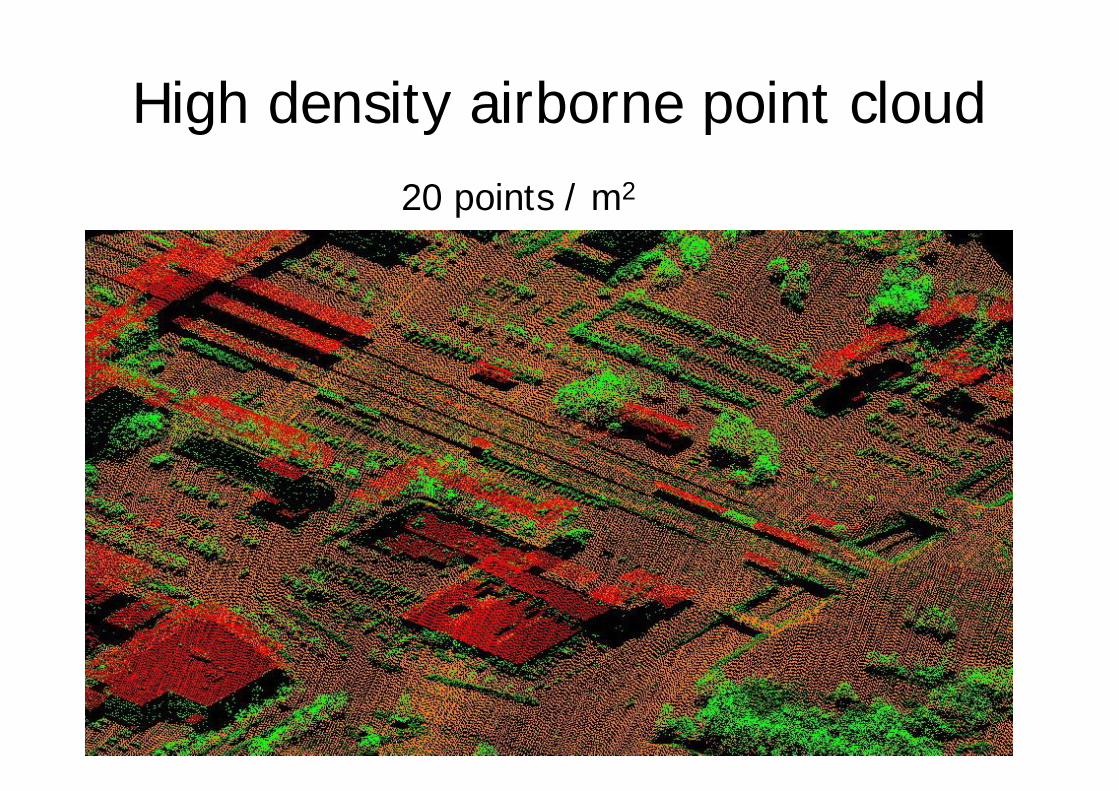
High density airborne point cloud20 points / m2
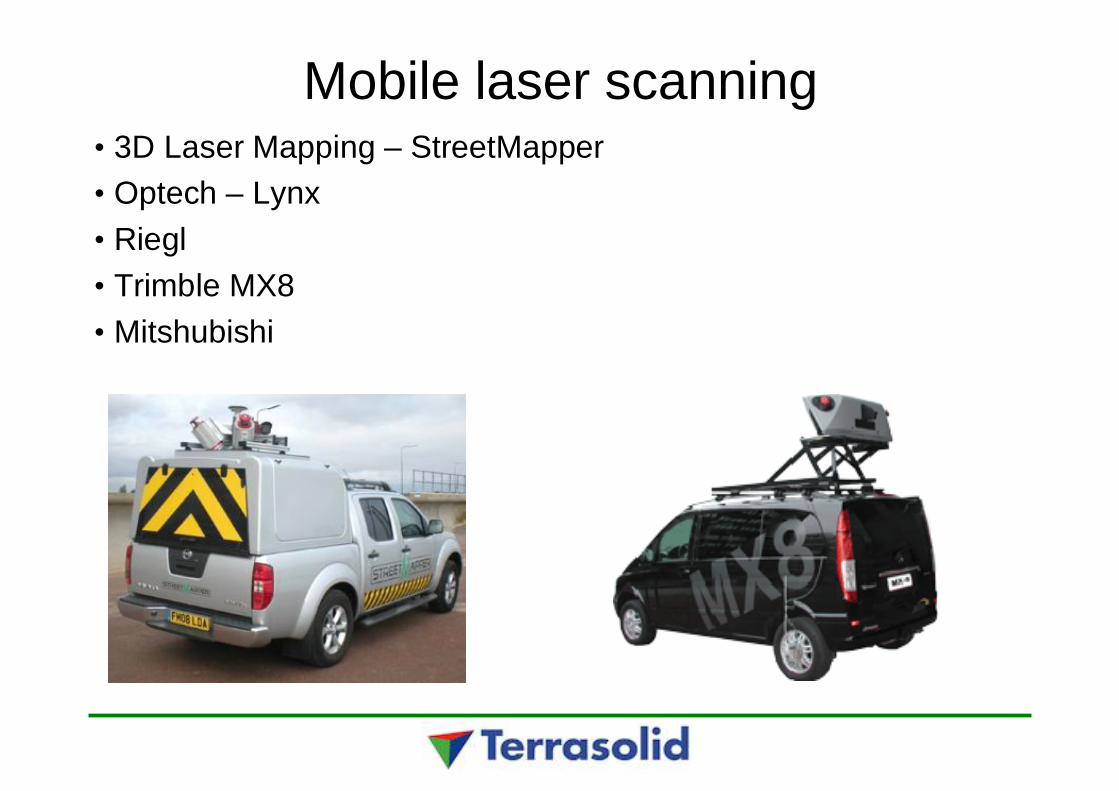
Mobile laser scanning• 3D Laser Mapping – StreetMapper• Optech – Lynx• Riegl• Trimble MX8• Mitshubishi
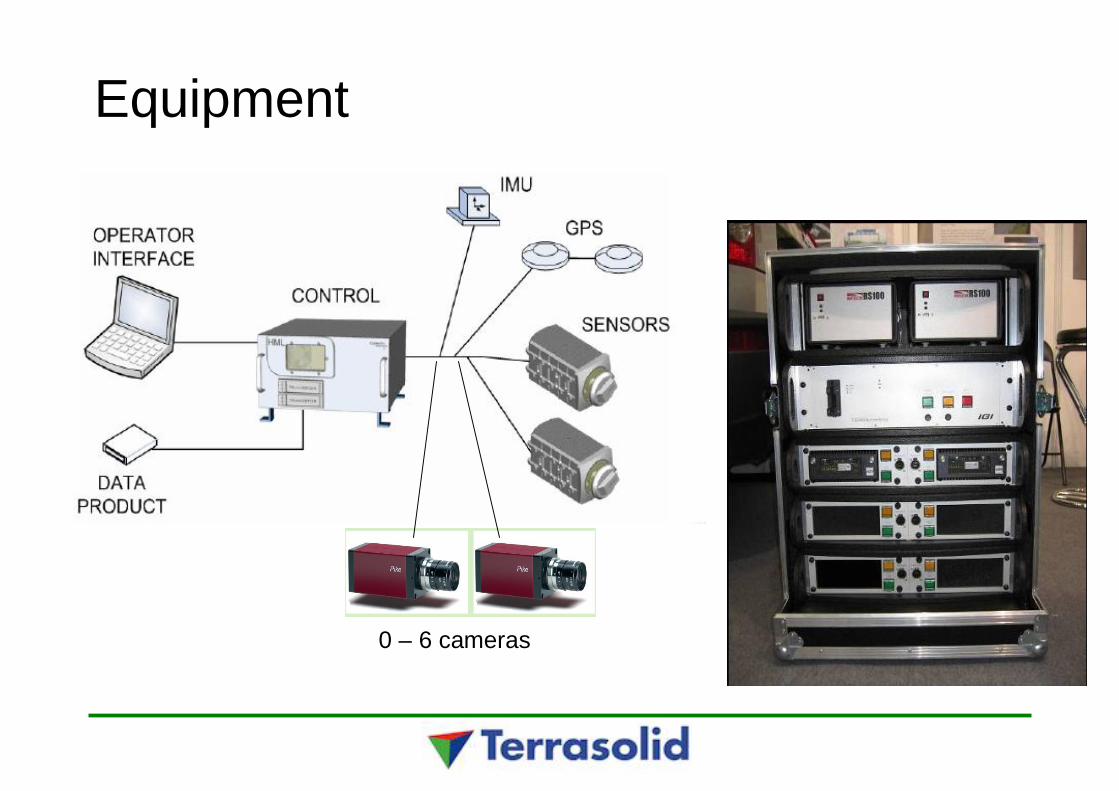
Equipment
0 – 6 cameras

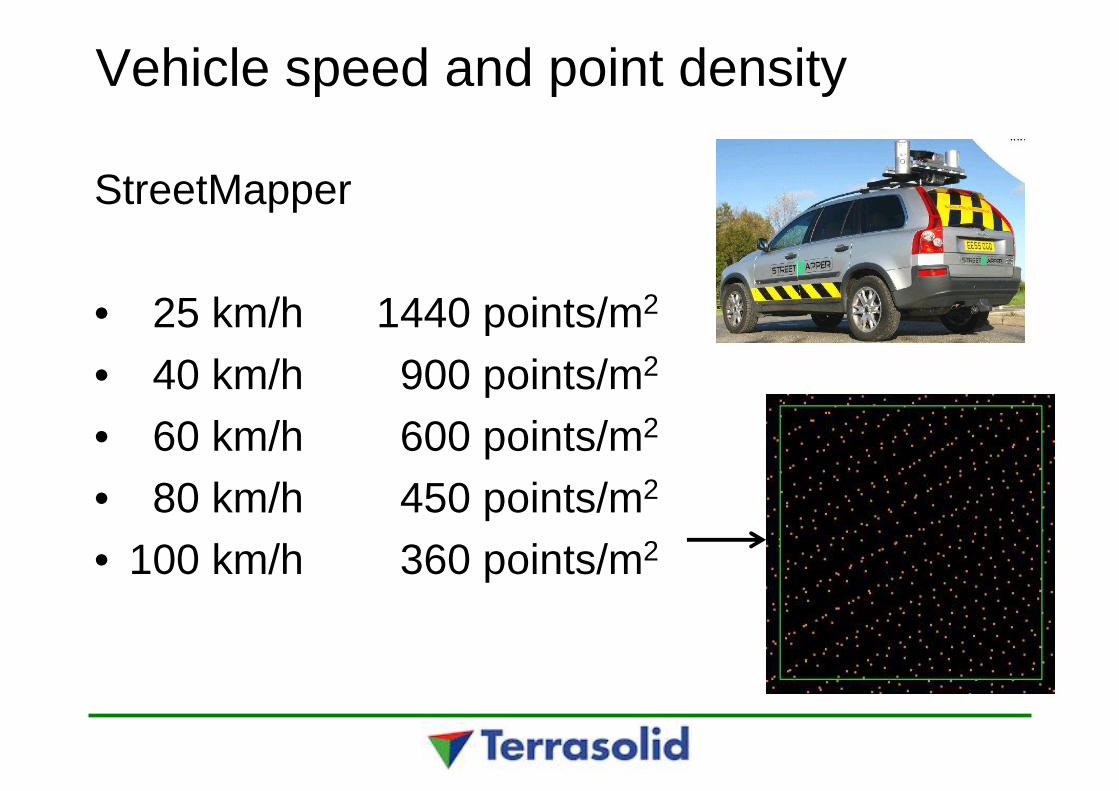
Vehicle speed and point density
StreetMapper
• 25 km/h 1440 points/m2
• 40 km/h 900 points/m2
• 60 km/h 600 points/m2
• 80 km/h 450 points/m2
• 100 km/h 360 points/m2
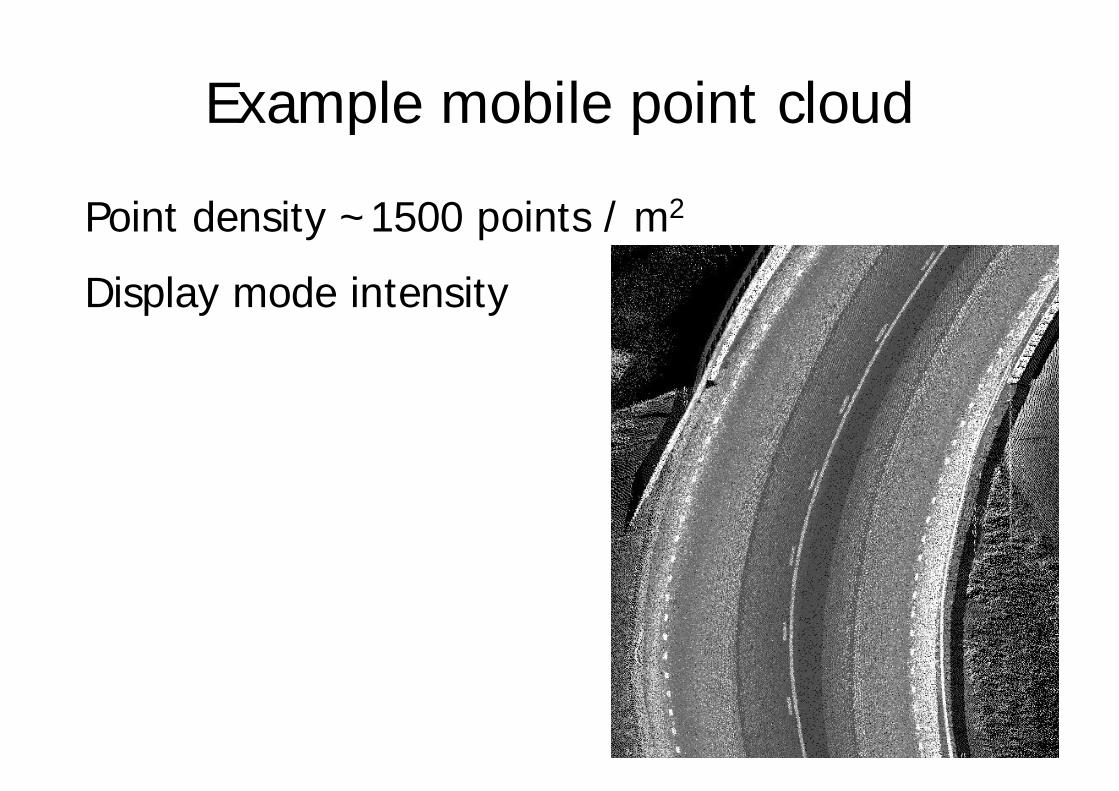
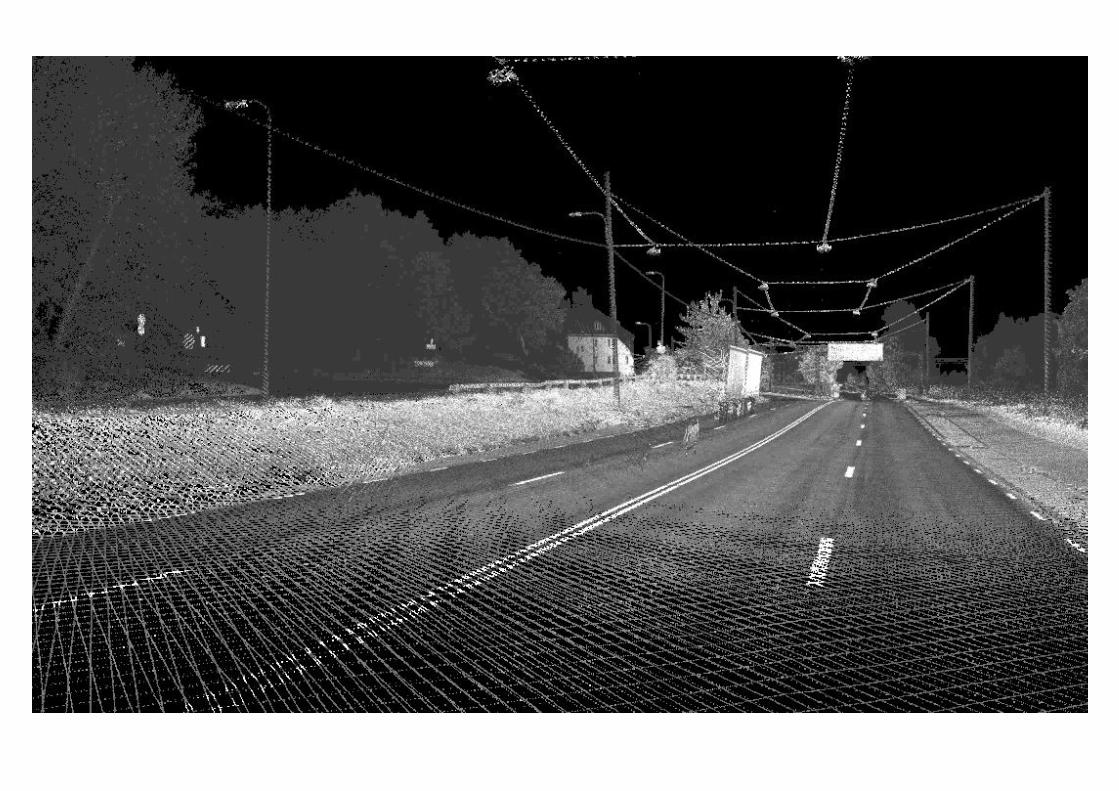
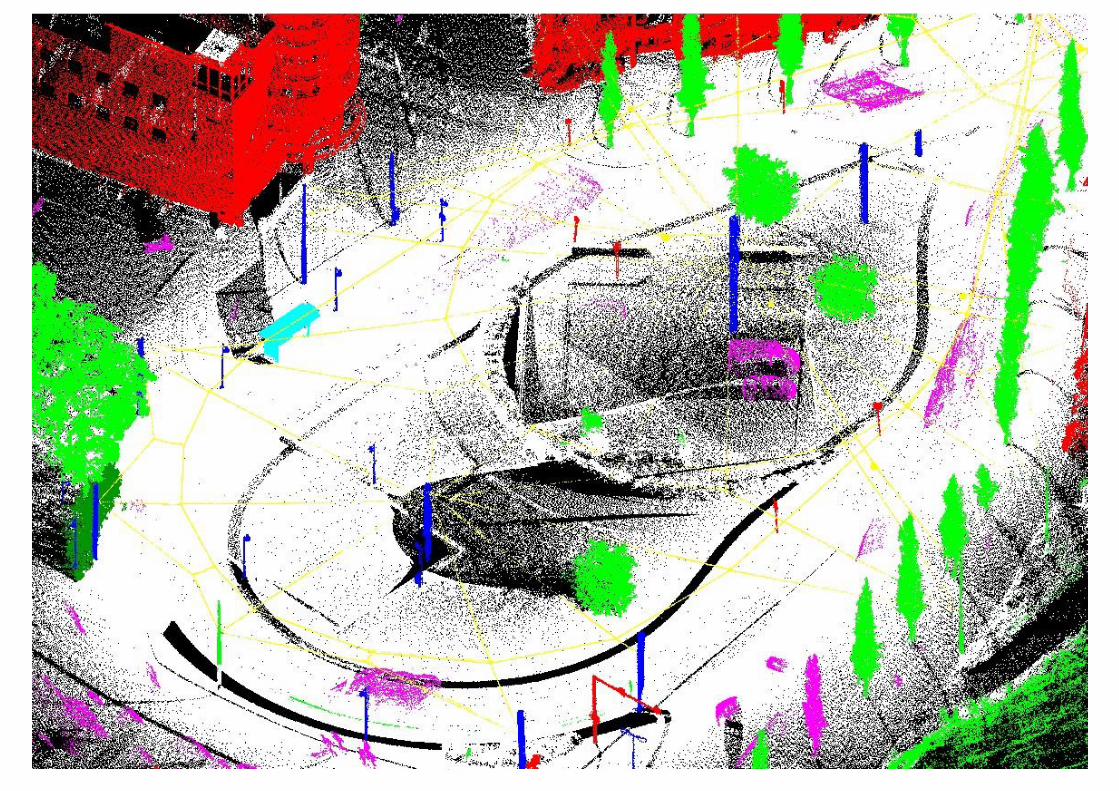
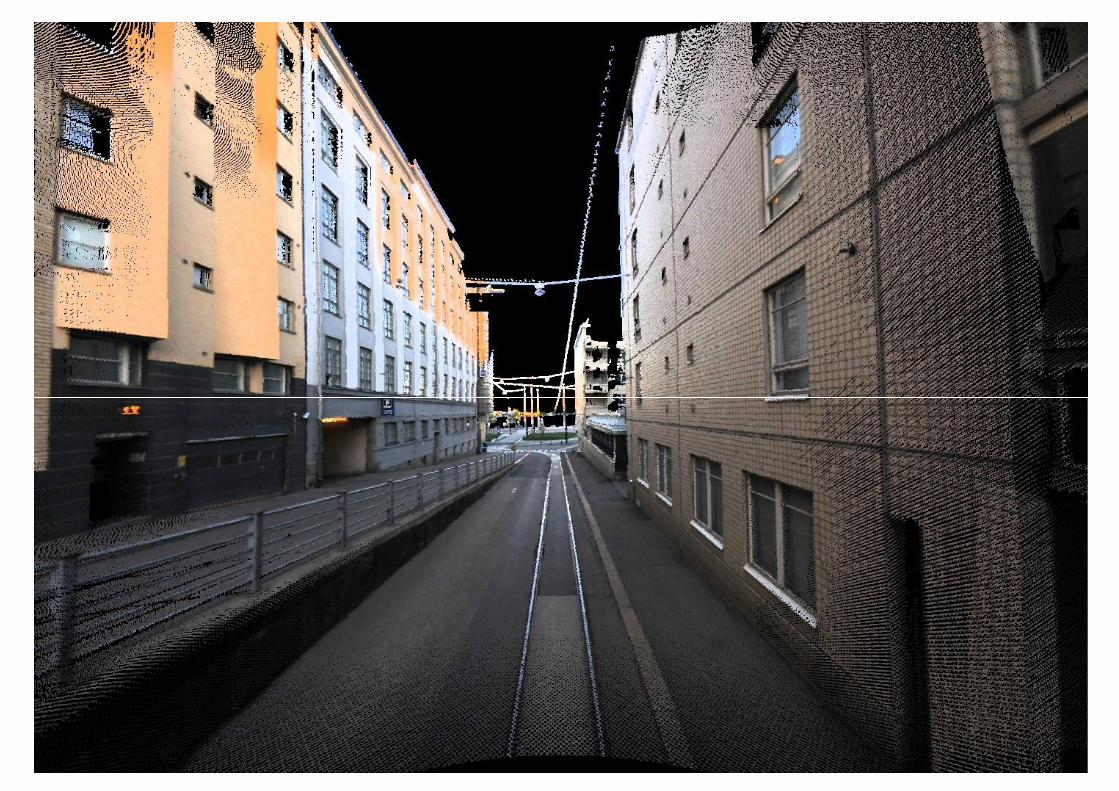
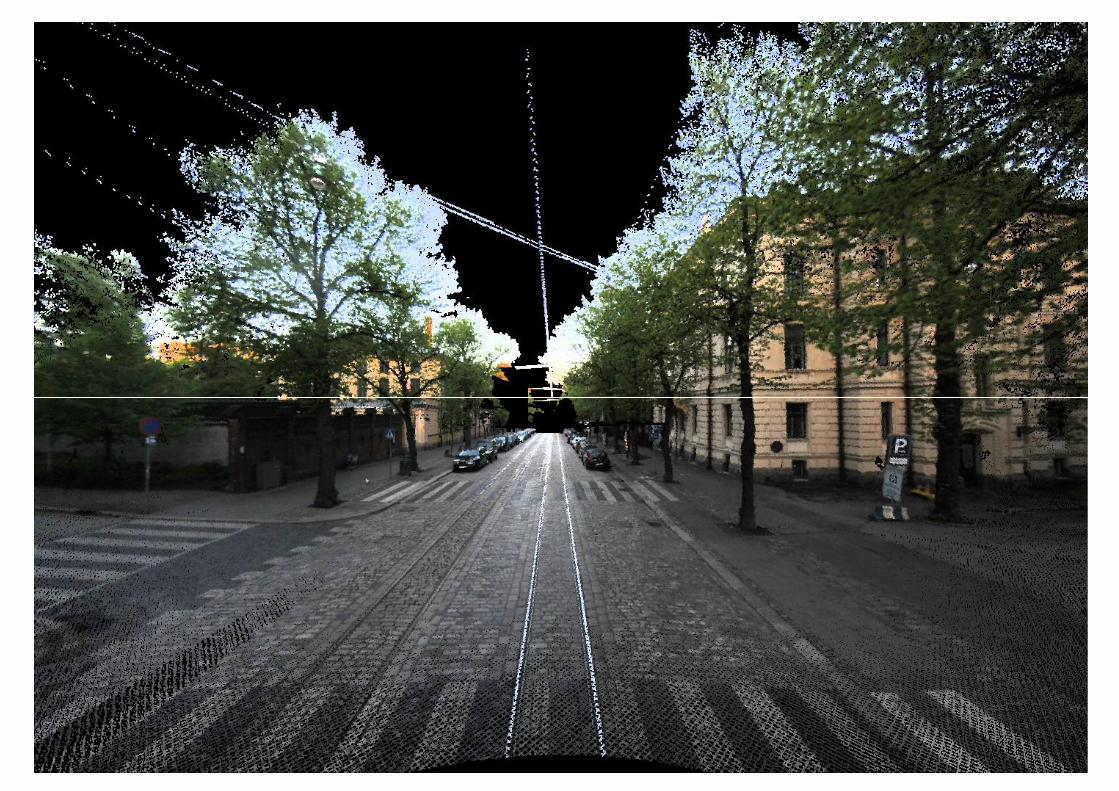
Example mobile point cloud
Point density ~1500 points / m2
Display mode intensity
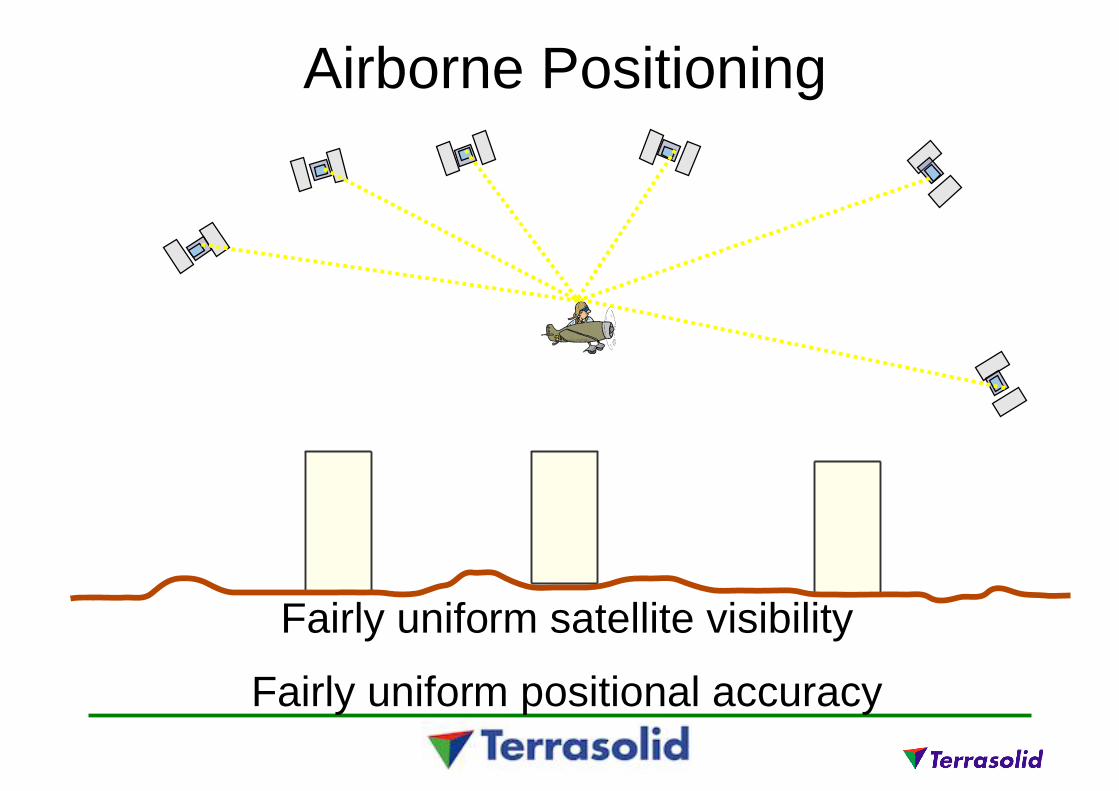
Airborne Positioning
Fairly uniform satellite visibility
Fairly uniform positional accuracy
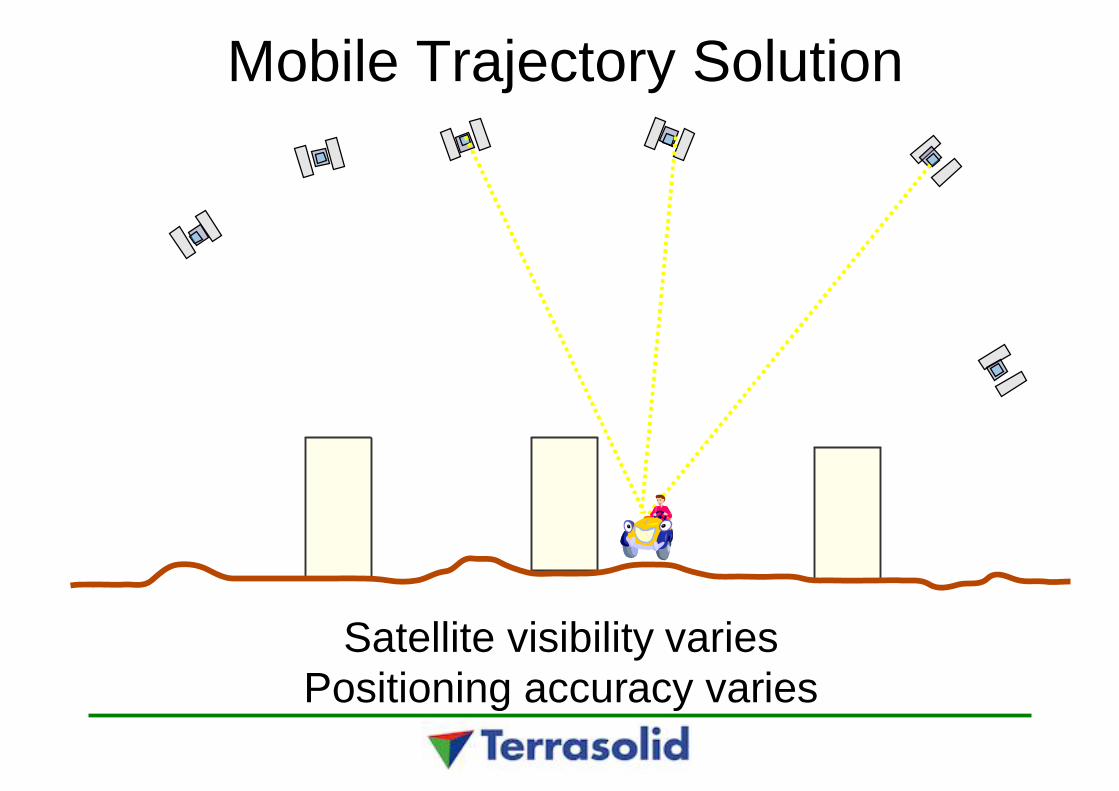
Mobile Trajectory Solution
Satellite visibility variesPositioning accuracy varies
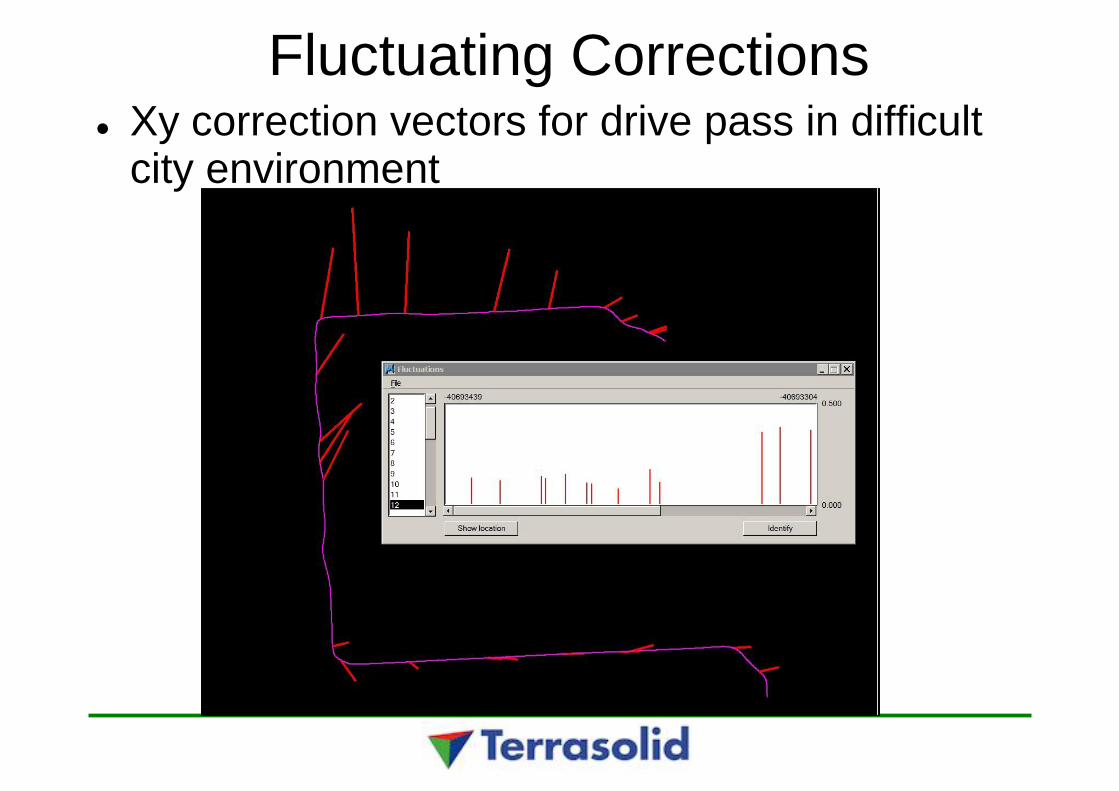
Fluctuating CorrectionsXy correction vectors for drive pass in difficultcity environment
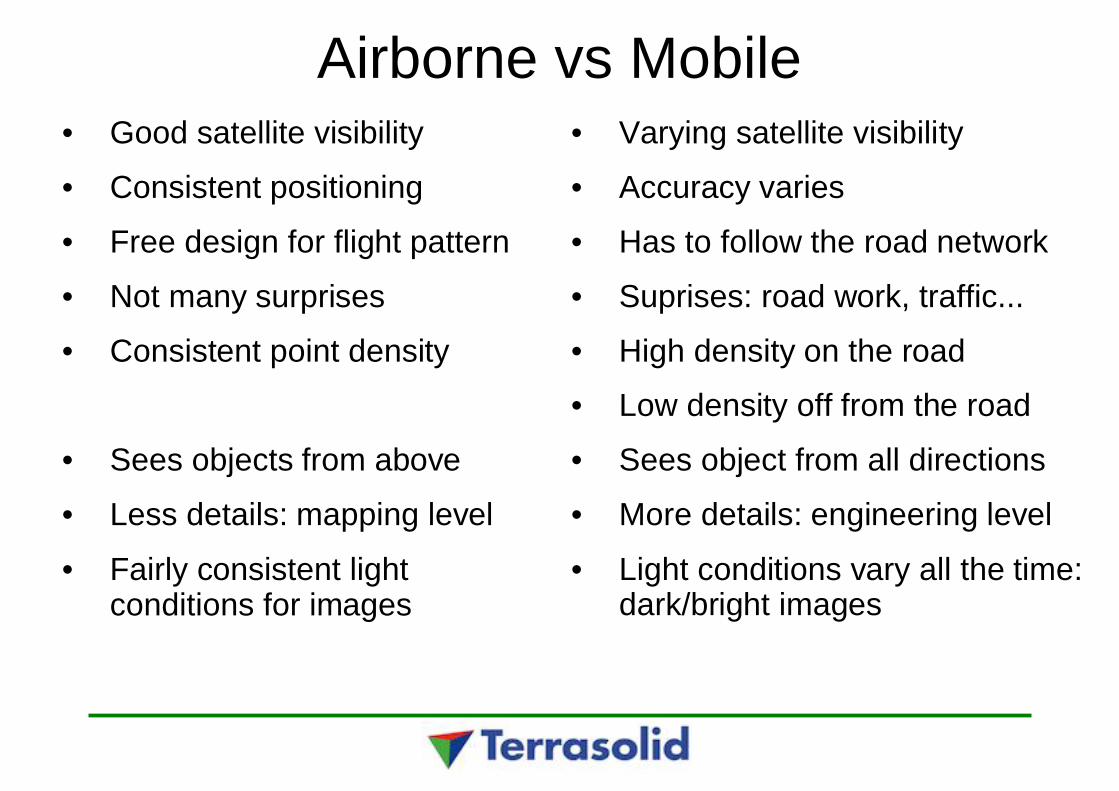
Airborne vs Mobile• Good satellite visibility
• Consistent positioning
• Free design for flight pattern
• Not many surprises
• Consistent point density
• Sees objects from above
• Less details: mapping level
• Fairly consistent lightconditions for images
• Varying satellite visibility
• Accuracy varies
• Has to follow the road network
• Suprises: road work, traffic...
• High density on the road
• Low density off from the road
• Sees object from all directions
• More details: engineering level
• Light conditions vary all the time:dark/bright images
Combine airborne and mobile
With airborne LiDAR you'll get more precise Z- andpositional accuracy
With airborne you'll see the building roofsautomatically vectorized buildings
Use oblique images to texture building walls
With mobile much more detail and relative precision
Use both for maximum accuracy and detail

Terrasolid solution
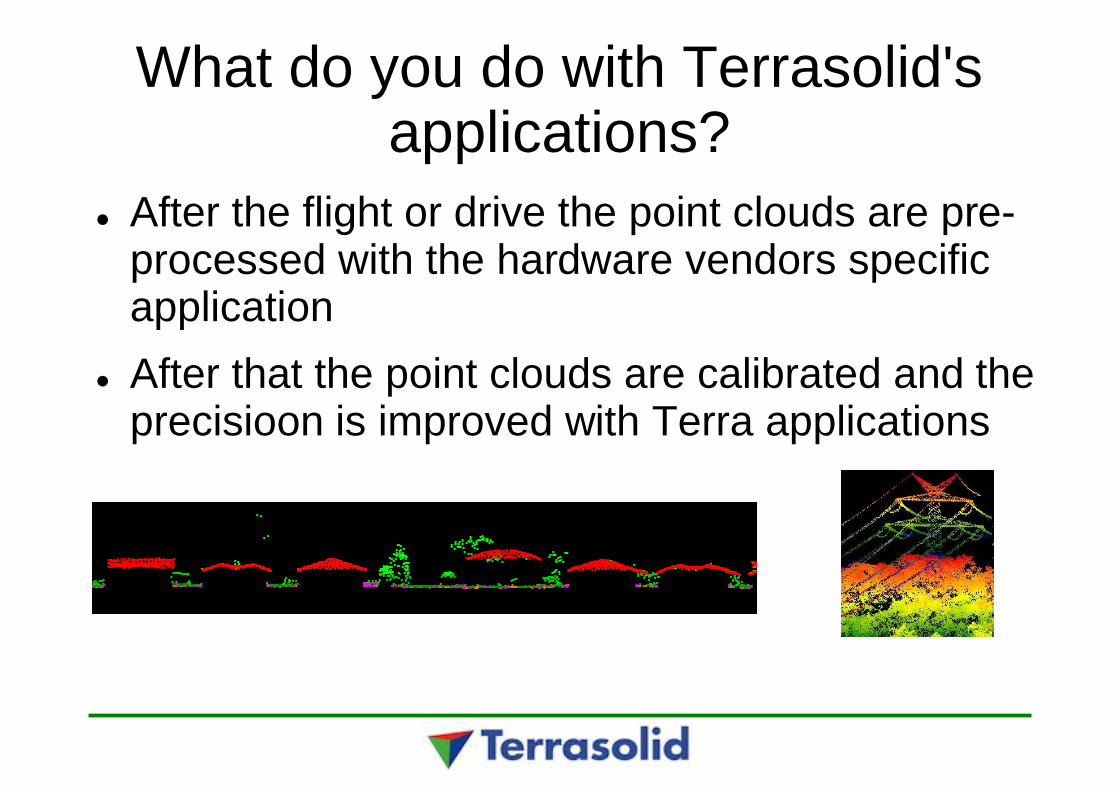
What do you do with Terrasolid'sapplications?
After the flight or drive the point clouds are pre-processed with the hardware vendors specificapplicationAfter that the point clouds are calibrated and theprecisioon is improved with Terra applications
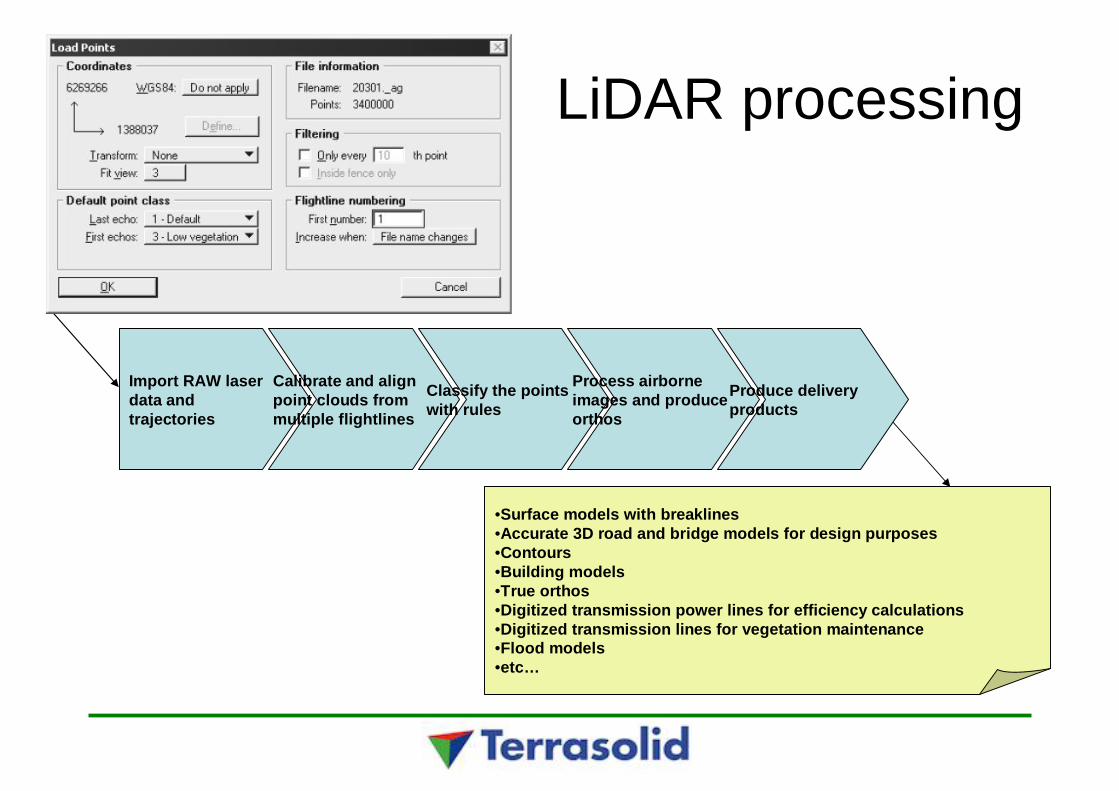
LiDAR processing
Import RAW laserdata andtrajectories
Calibrate and alignpoint clouds frommultiple flightlines
Classify the pointswith rules
Process airborneimages and produceorthos
Produce deliveryproducts
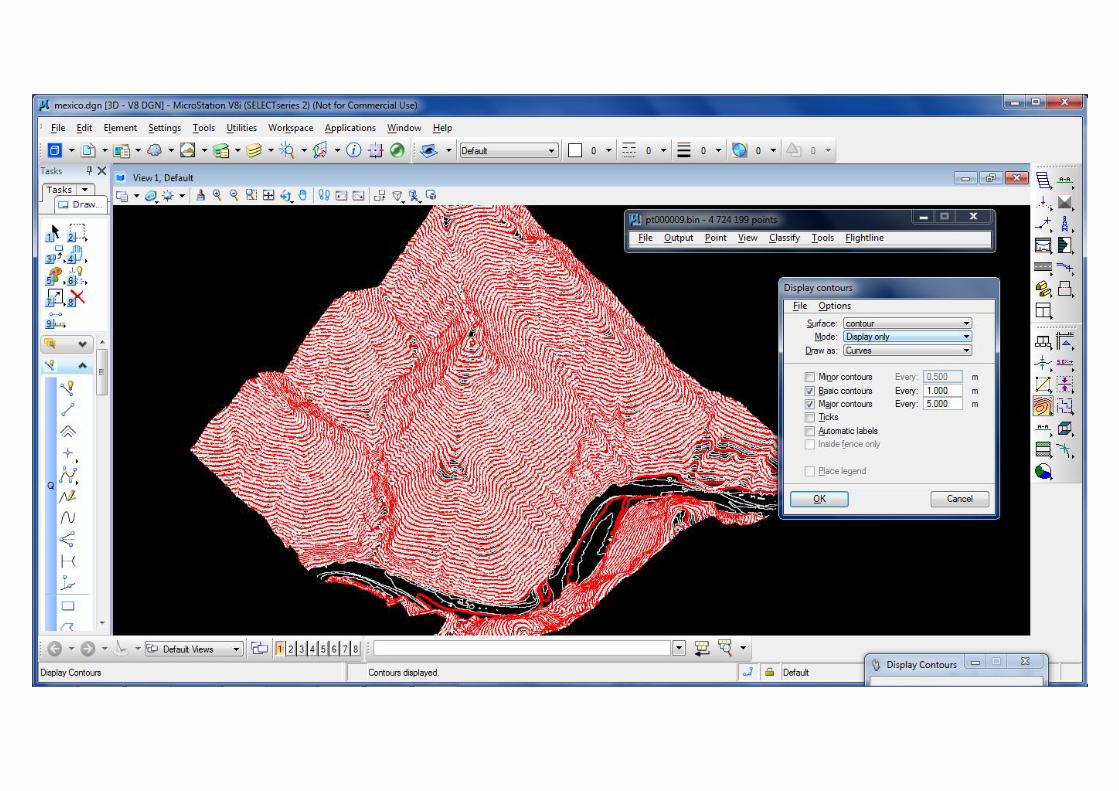
•Surface models with breaklines•Accurate 3D road and bridge models for design purposes•Contours•Building models•True orthos•Digitized transmission power lines for efficiency calculations•Digitized transmission lines for vegetation maintenance•Flood models•etc…
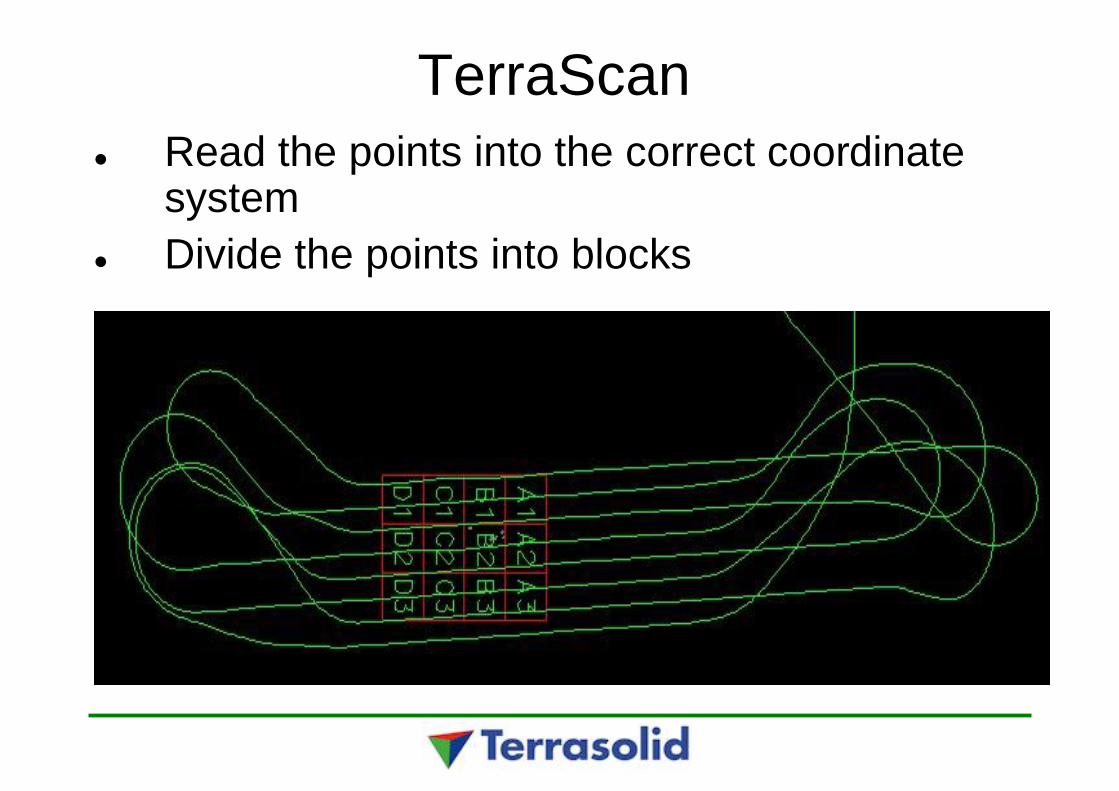
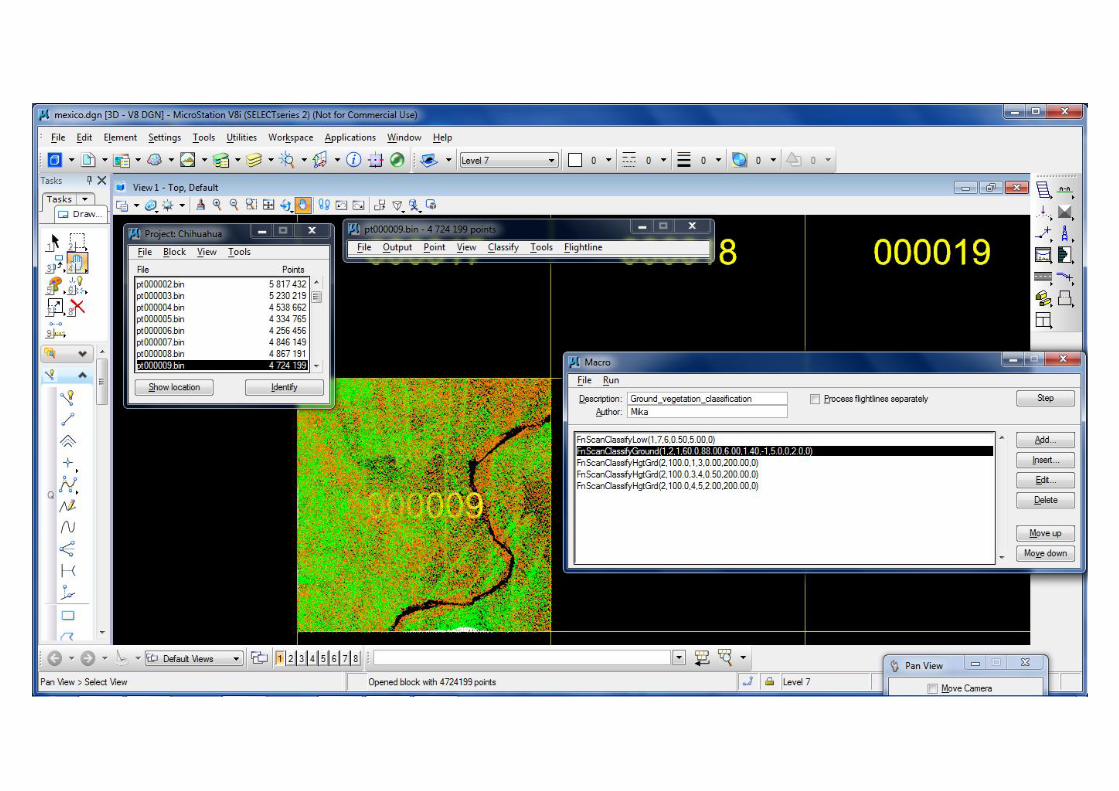
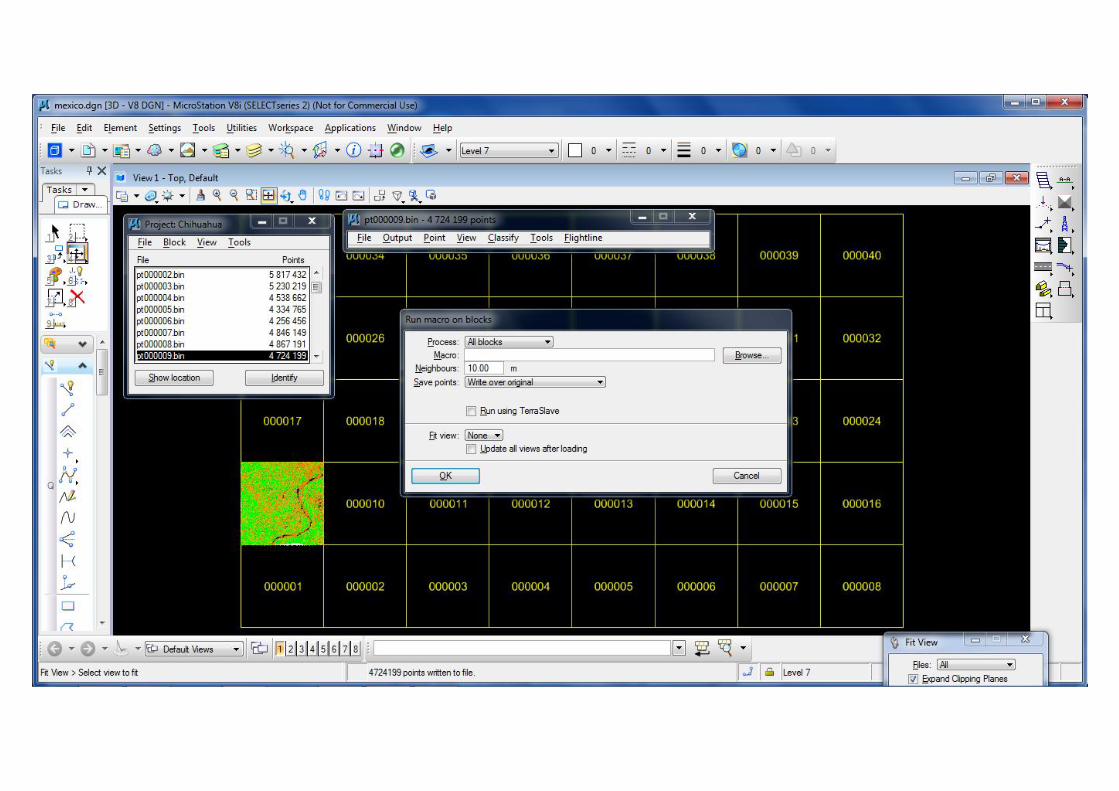
TerraScanRead the points into the correct coordinatesystemDivide the points into blocks
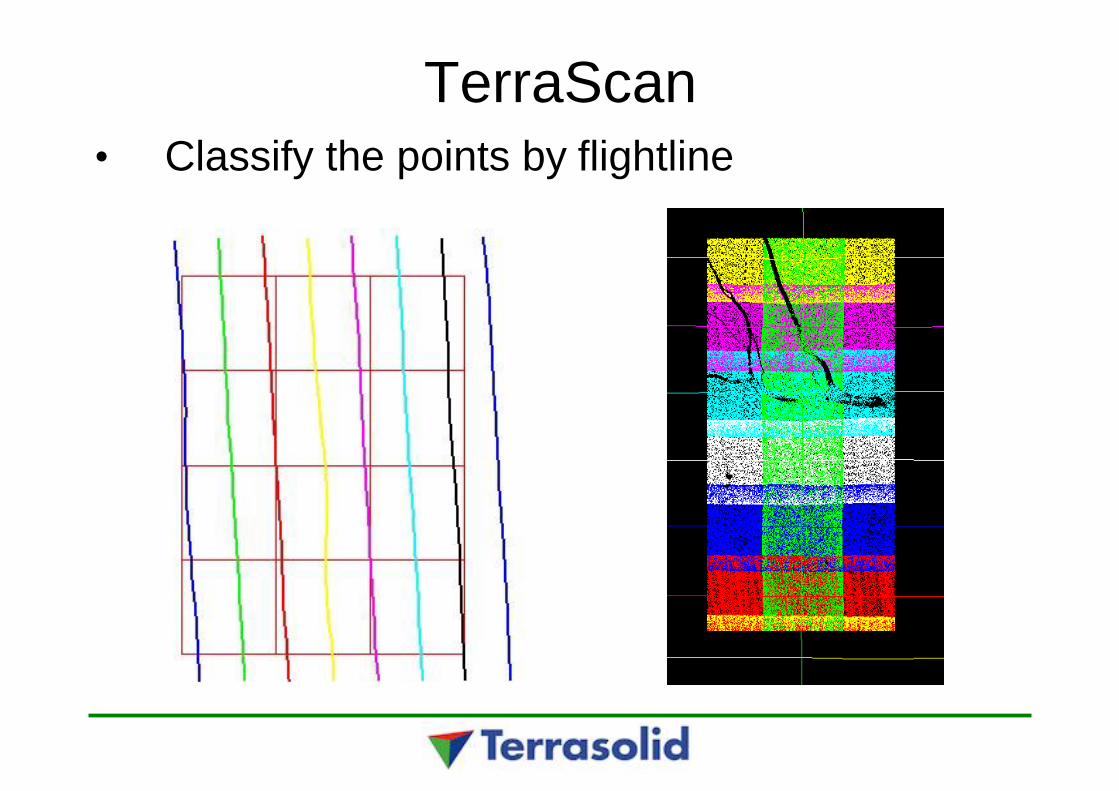
TerraScan• Classify the points by flightline
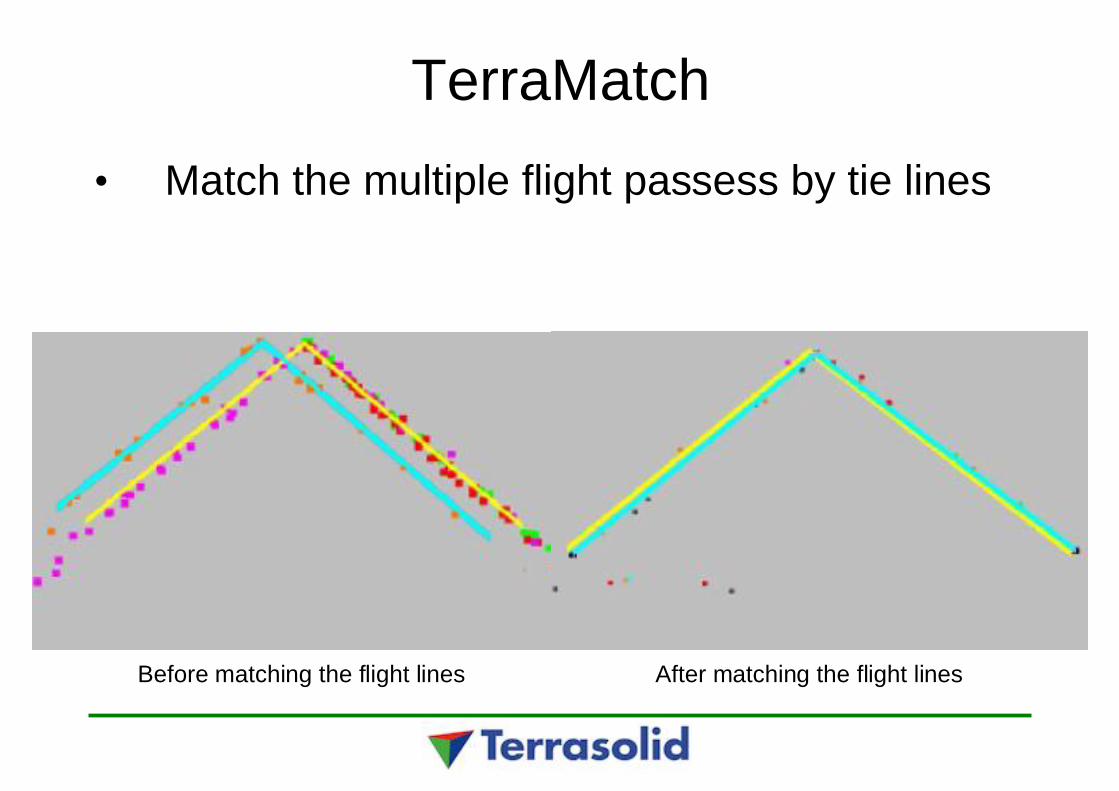
TerraMatch• Match the multiple flight passess by tie lines
Before matching the flight lines After matching the flight lines
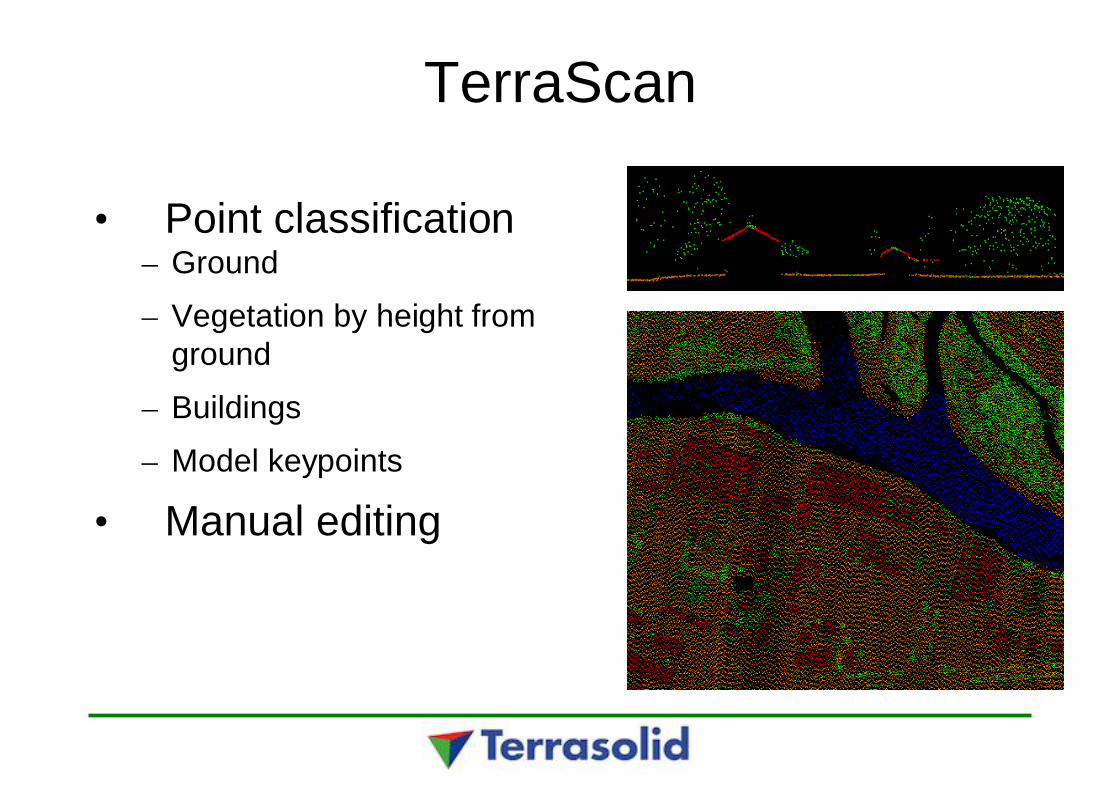
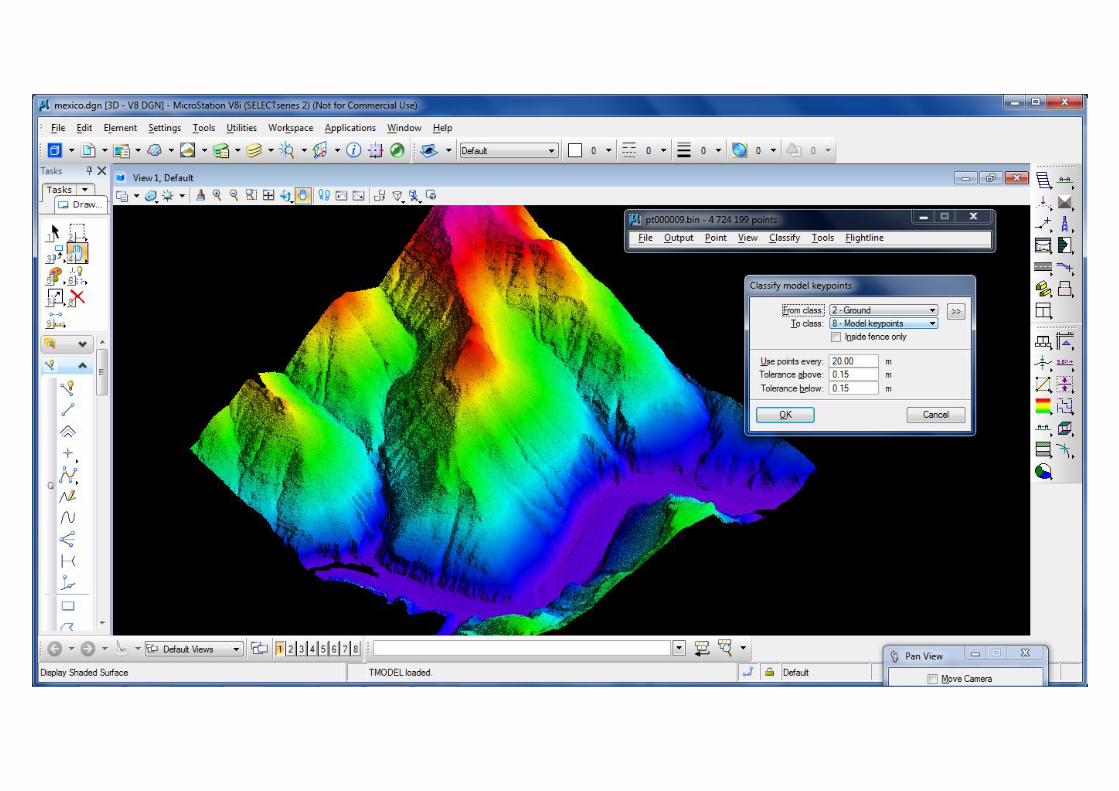
TerraScan
• Point classification– Ground
– Vegetation by height fromground
– Buildings
– Model keypoints
• Manual editing

TerraPhoto• Create and rectify ortho
mosaic• TrueOrtho-production• Supports the point
classification process• Laser point coloring• Building wall texturing from
oblique images• Visualizations and
animations
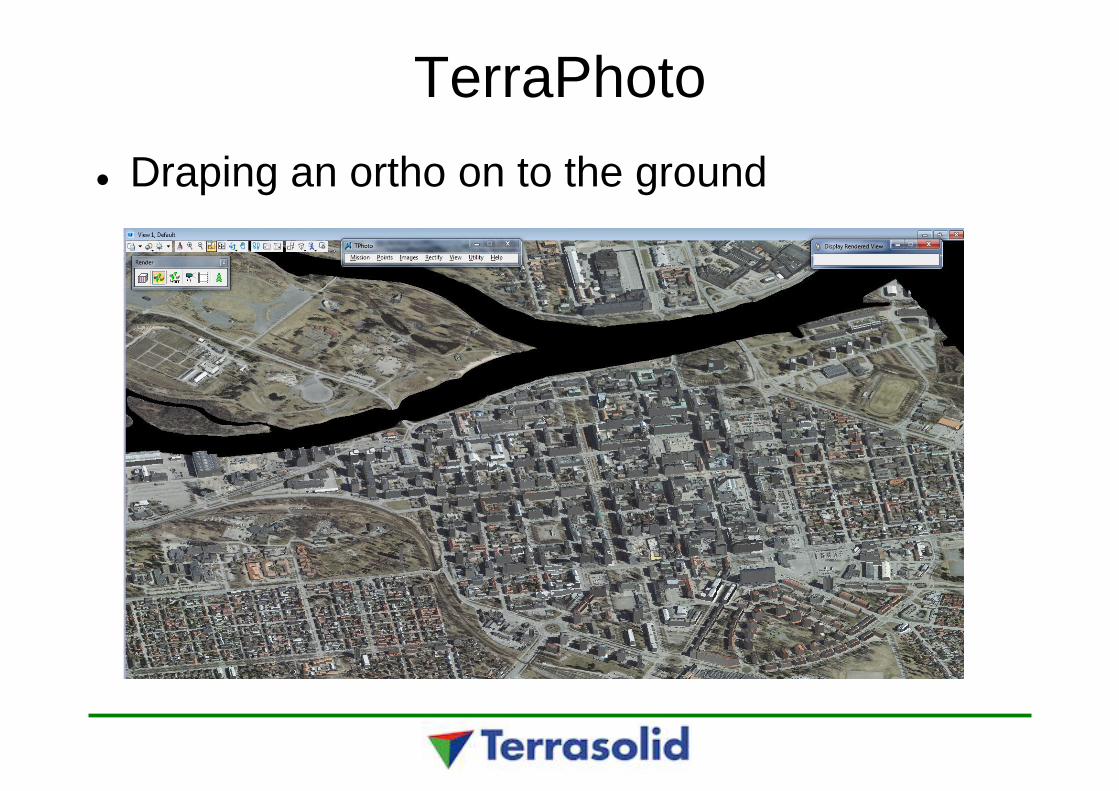
TerraPhotoDraping an ortho on to the ground

Point classificationAutomatic and manual routines
1 Default2 Ground3 Low vegetation4 Medium vegetation5 High vegetation6 Building7 Low point8 Model keypoints9 Vector building10 Bridge11 Wire12 Tree13 Breakline ground

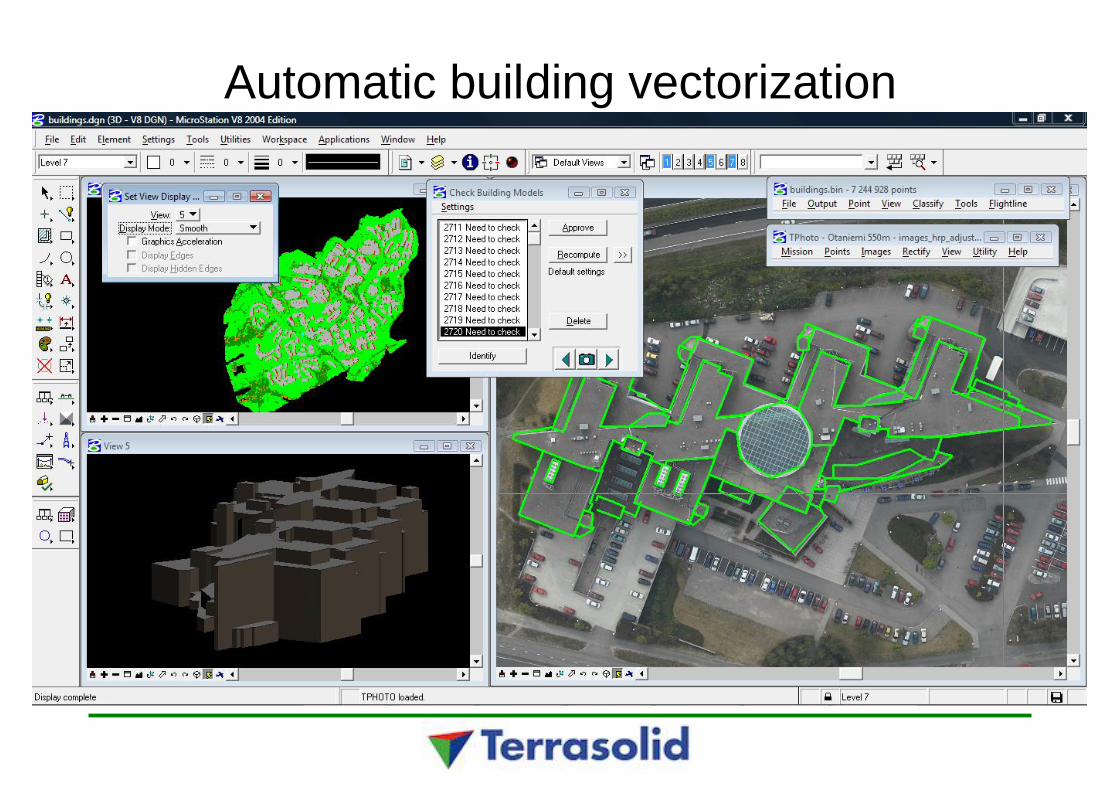
Automatic building vectorization
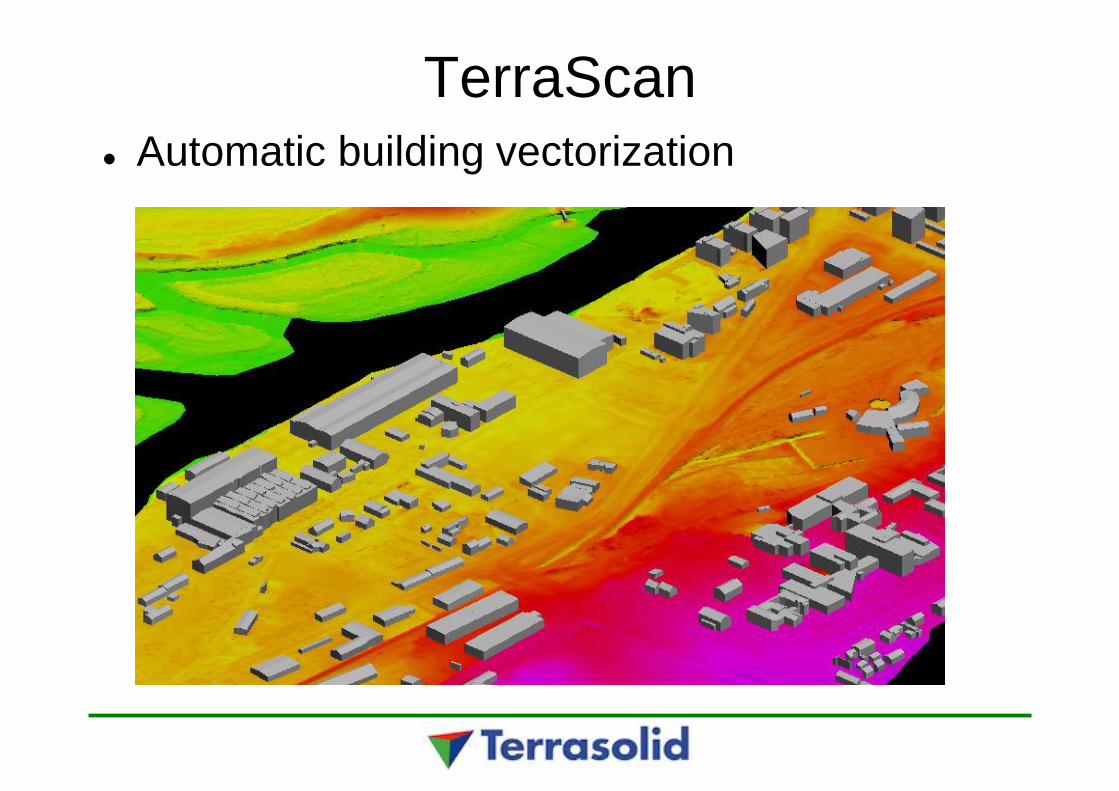
TerraScanAutomatic building vectorization
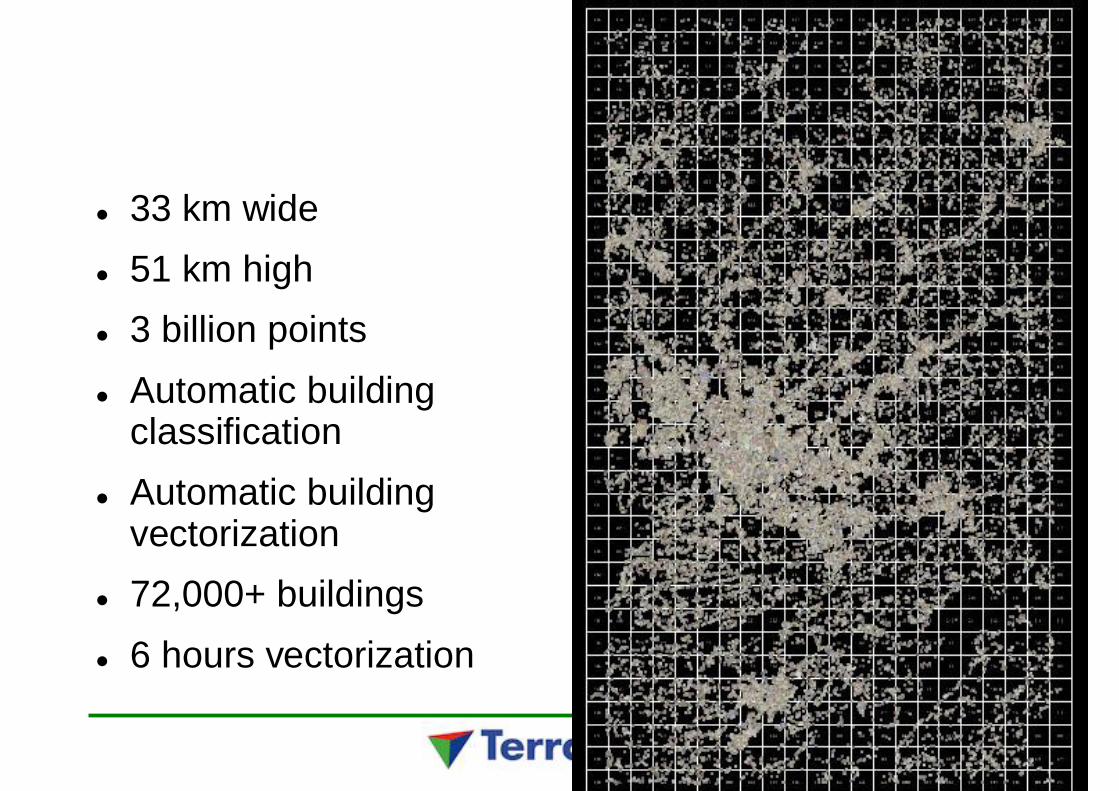
33 km wide51 km high3 billion pointsAutomatic buildingclassificationAutomatic buildingvectorization72,000+ buildings6 hours vectorization
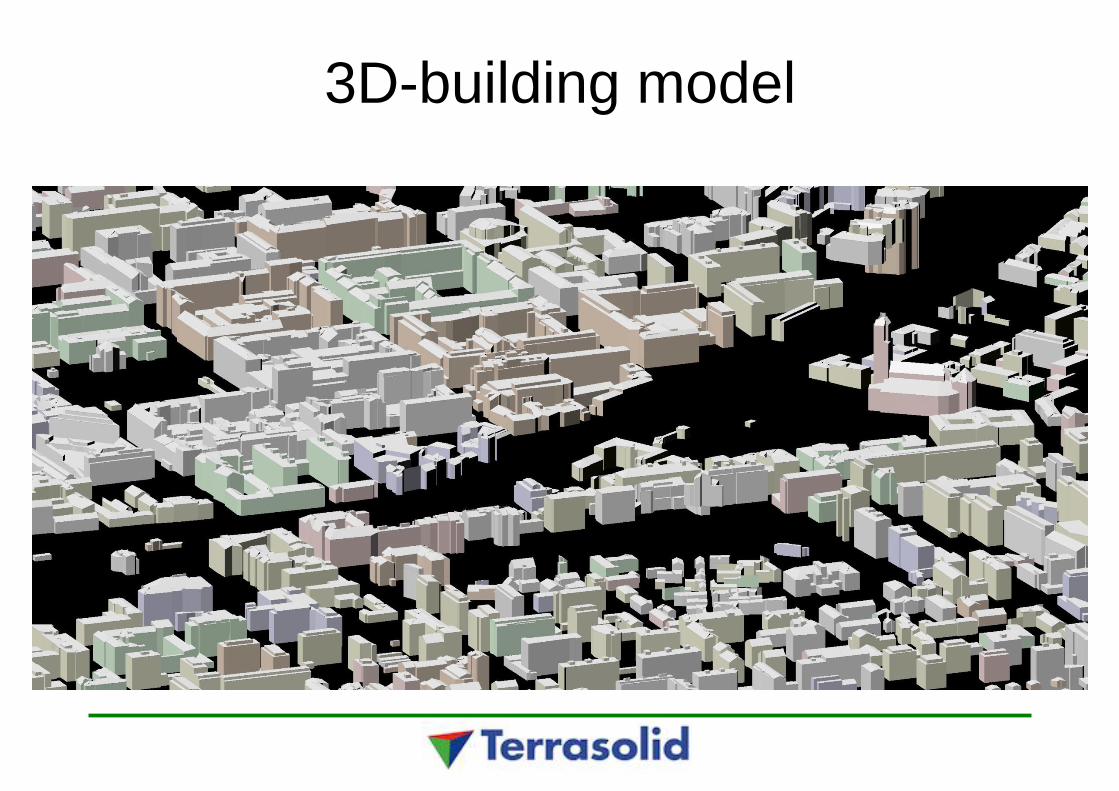
3D-building model
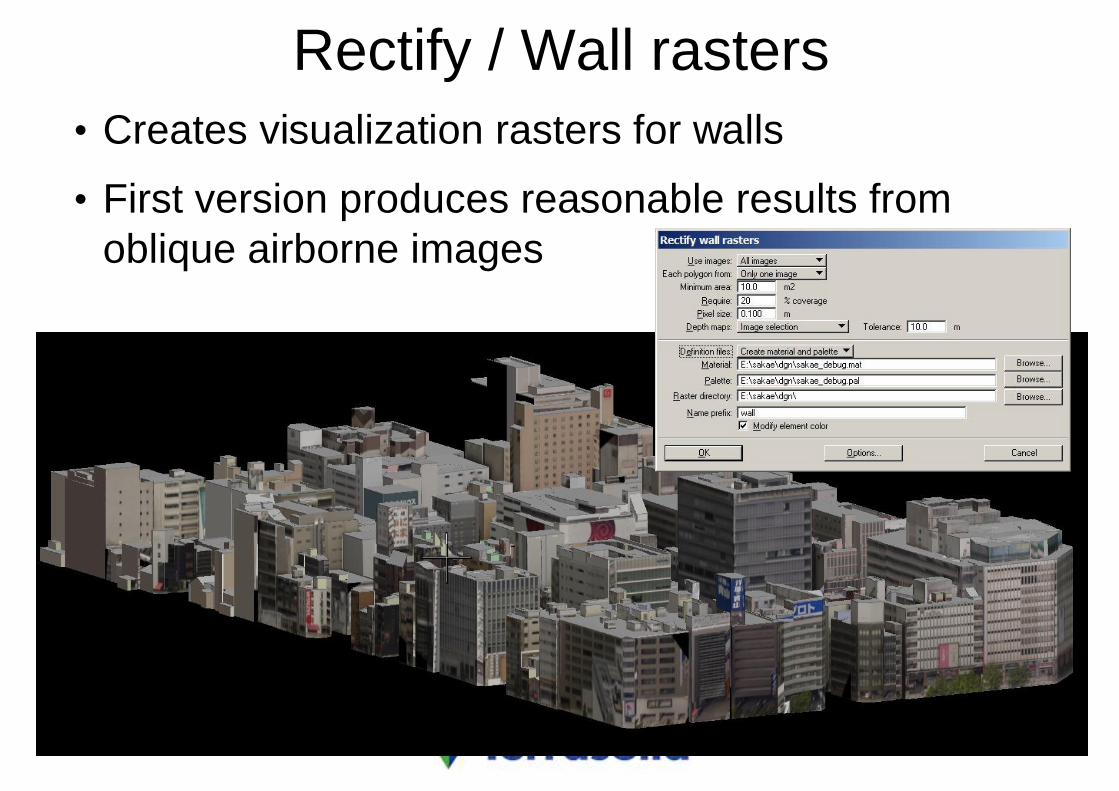
Rectify / Wall rasters• Creates visualization rasters for walls
• First version produces reasonable results fromoblique airborne images


Power line vectorization
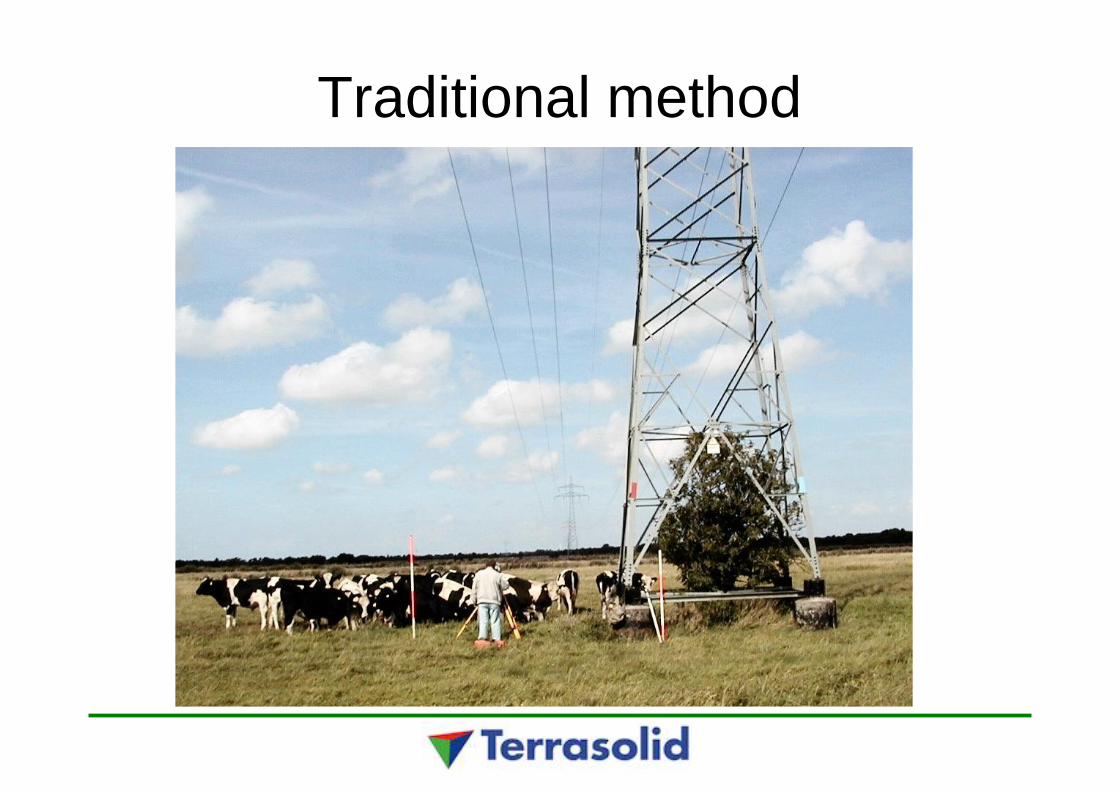
Traditional method

Helicopter laser scanning
13.6.2009 MTS
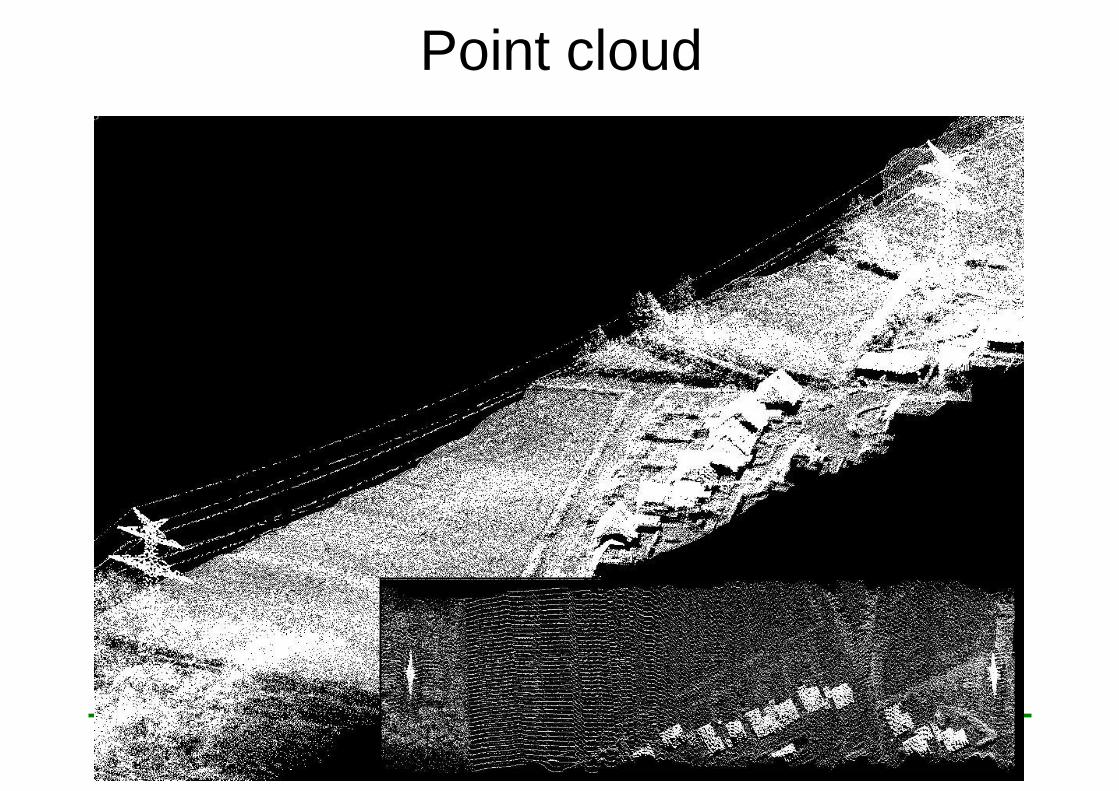
Point cloud

13.6.2009 MTS
Classified laser data
13.6.2009 MTS
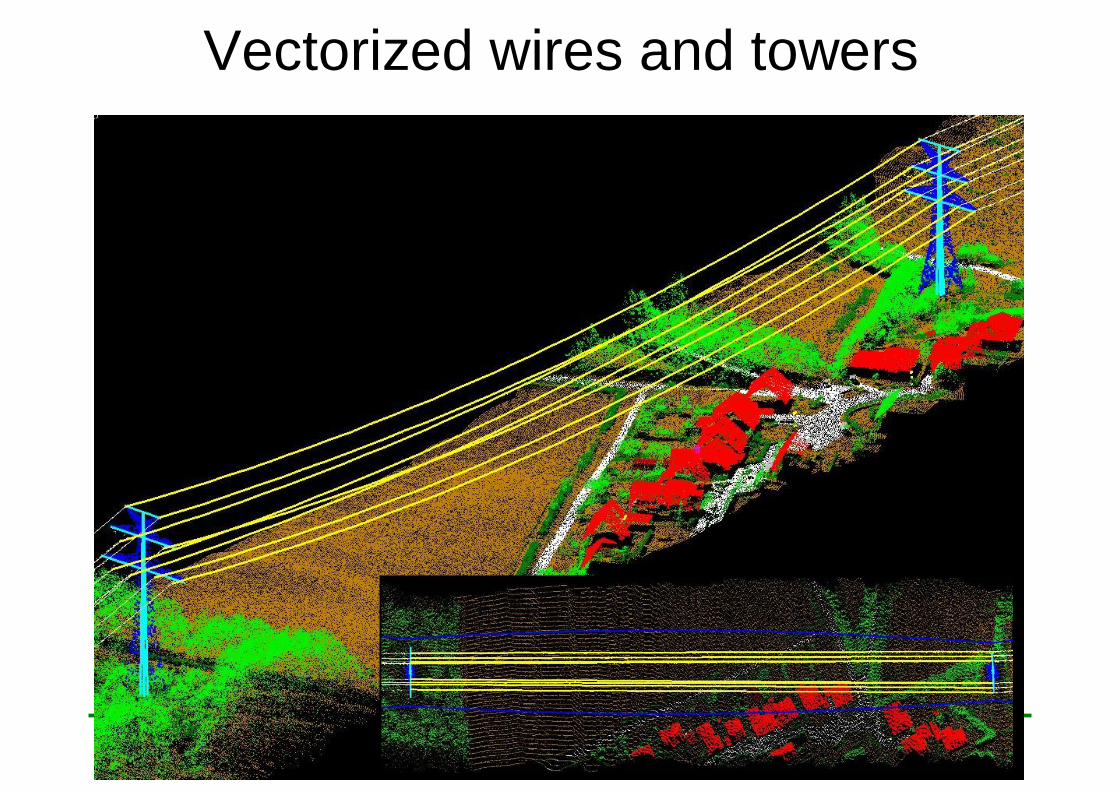
Vectorized wires and towers
13.6.2009 MTS
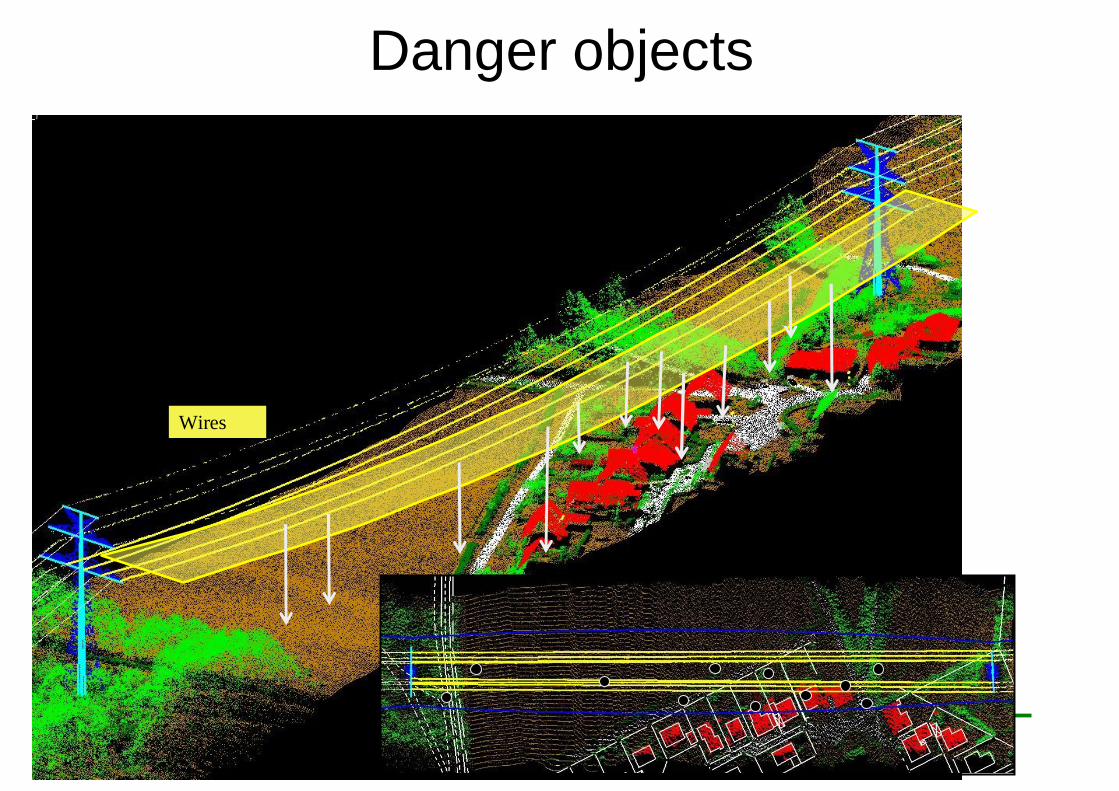
Danger objects
Wires
Distance

Towers
14.6.2009 MTS
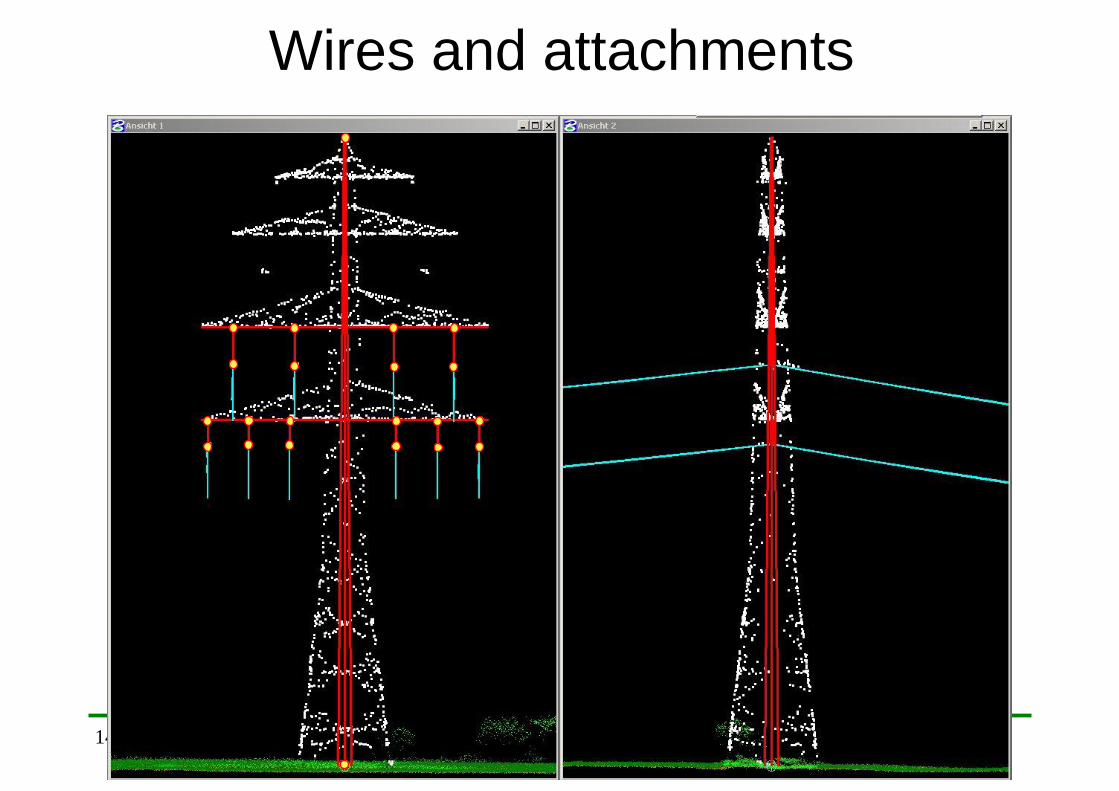
Wires and attachments
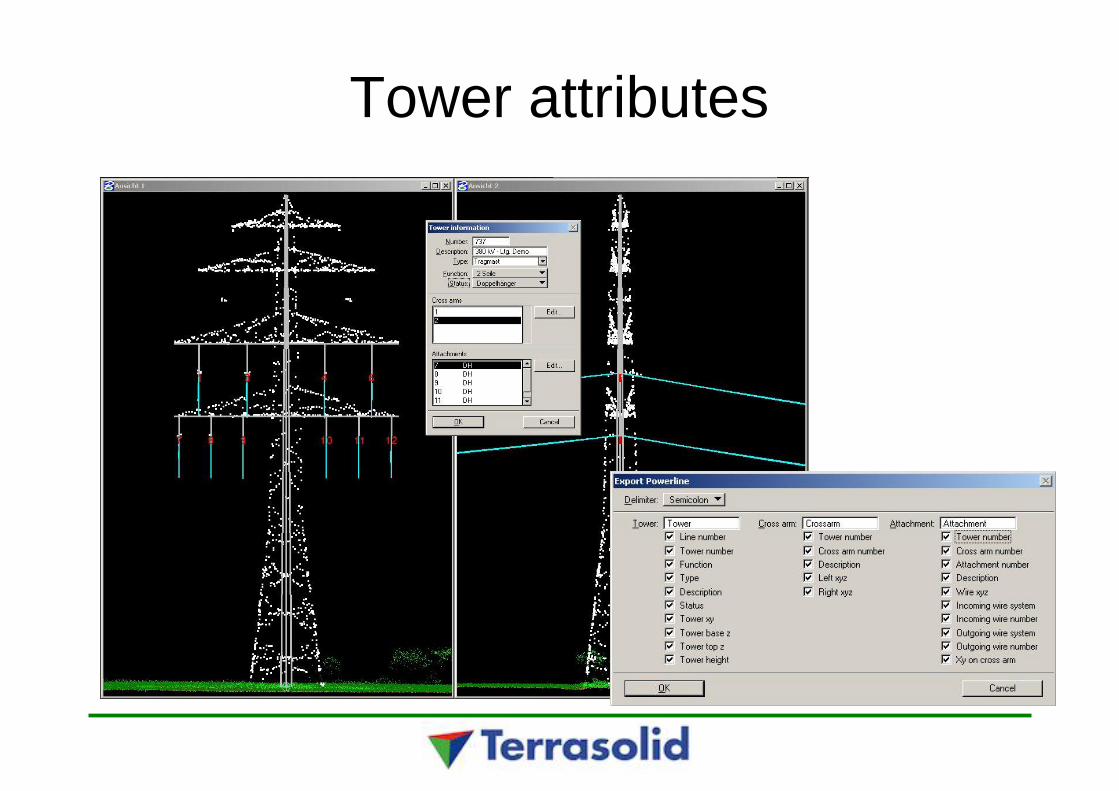
Tower attributes

Helsinki Tram Survey
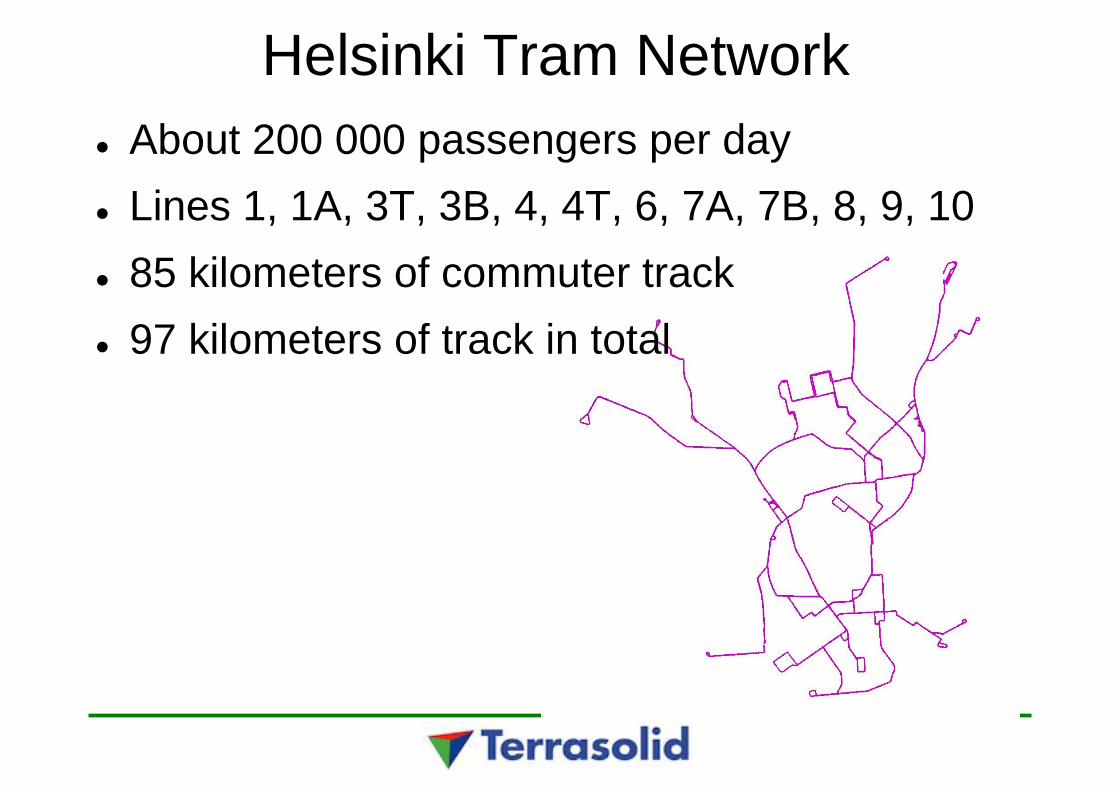
Helsinki Tram NetworkAbout 200 000 passengers per dayLines 1, 1A, 3T, 3B, 4, 4T, 6, 7A, 7B, 8, 9, 1085 kilometers of commuter track97 kilometers of track in total
Helsinki Tram Survey
1. Obtain precise data for maintenance system2. Simulate new trams3. ”High-asphalt” calculation
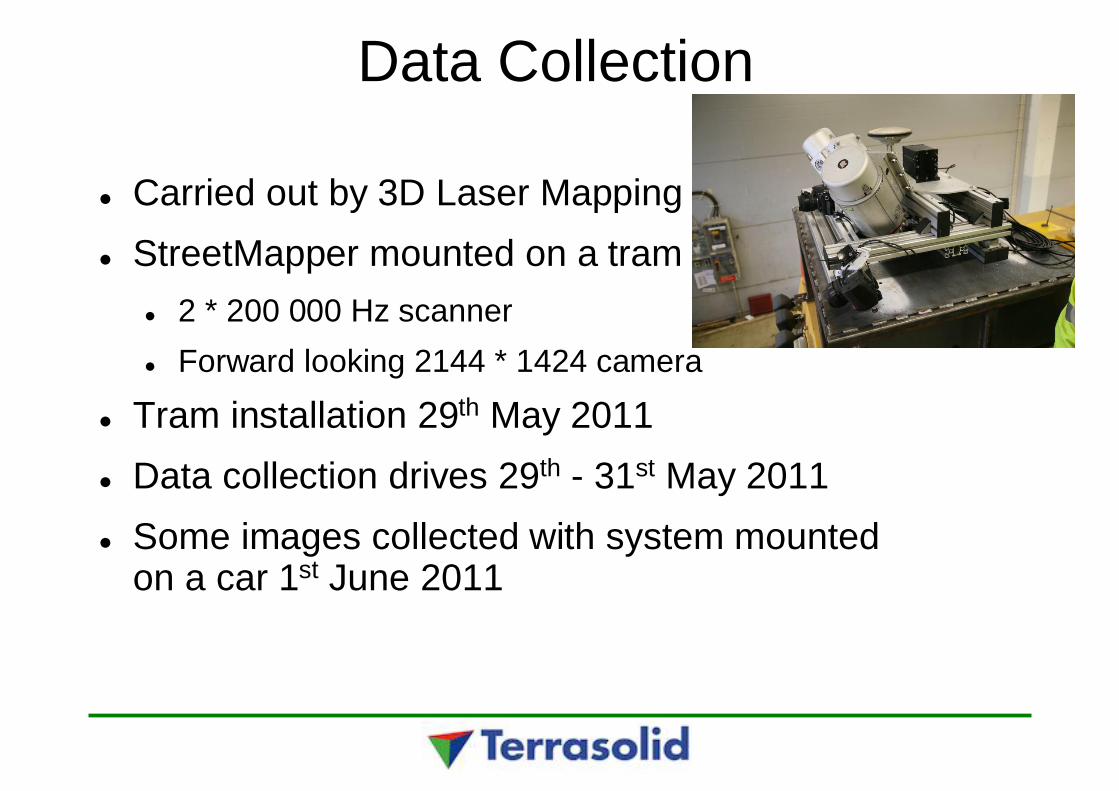
Data Collection
Carried out by 3D Laser MappingStreetMapper mounted on a tram
2 * 200 000 Hz scannerForward looking 2144 * 1424 camera
Tram installation 29th May 2011Data collection drives 29th - 31st May 2011Some images collected with system mountedon a car 1st June 2011
Data Volume14 603 216 184 laser points collected
462 GB as .las files
19 628 forward looking images recorded15 GB as .jpg images


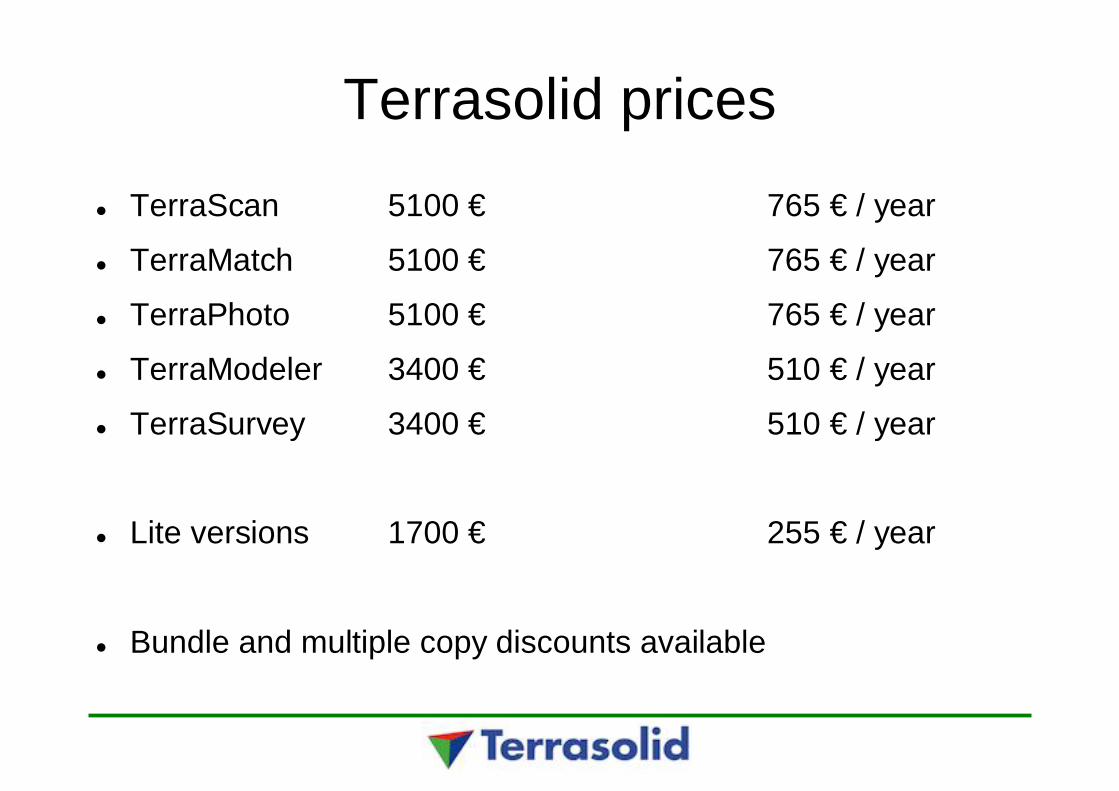
Terrasolid pricesTerraScan 5100 € 765 € / year
TerraMatch 5100 € 765 € / year
TerraPhoto 5100 € 765 € / year
TerraModeler 3400 € 510 € / year
TerraSurvey 3400 € 510 € / year
Lite versions 1700 € 255 € / year
Bundle and multiple copy discounts available