teorÍa de kaluza-klein - ugr.esbjanssen/text/tfgmartinezbaena.pdf · reviewing the mathematical...
TRANSCRIPT

TEORÍA DE KALUZA-KLEIN
JUAN SILVERIO MARTÍNEZ BAENA
September 8, 2014
TUTOR DEL TRABAJO : BERT JANSSEN(Depto. de F ısica Teorica y del cosmos)Universidad deGranada
Abstract
In 1920's Theodor Kaluza and Oskar Klein realized that can unifygravitation (General Relativity) and electromagnetism (Maxwell theory)in a single interaction if it`s assumed that the space-time has an additionalcompact and periodic dimension type S1. In this paper, we are interesed inreviewing the mathematical and physical aspects of Kaluza-Klein originaltheory. At rst, it is exposed an introduction to dierential geometry, withLevi-Civita mathematical methods (based on metric tensor an Levi-Civitaspin conection); as a support to explain an equivalent but more convenientformalism (Vielbeins formalism). Finnally, it is proposed an Ansatz for theve-dimensional metric tensor in order to calculate, one by one, Vielbeins,anoholonomy coecients, spin conection, Ricci tensor and Ricci scalar.Finnally, we will be prepared to reduce ve-dimensional Einstein-Hilbertacction to Einstein-Maxwell four-dimensional acction not-trivially coupledwith a scalar eld, the Dilatón.
Figure 1: Theodor Kaluza (left) and Oskar Klein (right)
1

Contents
1 Introducción 3
1.1 Espacios Euclídeos . . . . . . . . . . . . . . . . . . . . . . . 31.2 Concepto de Variedad . . . . . . . . . . . . . . . . . . . . . 4
2 Formalismo de Levi-Civita 5
2.1 Cambios generales de coordenadas . . . . . . . . . . . . . . 62.2 Cambios innitesimales de coodenadas . . . . . . . . . . . . 9
3 Formalismo de Vielbein. 11
3.1 Cambios de coordenadas en el espacio tangente . . . . . . . 113.2 Postulados de Vielbein . . . . . . . . . . . . . . . . . . . . . 15
3.2.1 Primer postulado de Vielbein . . . . . . . . . . . . . 163.2.2 Segundo postulado de Vielbein . . . . . . . . . . . . 163.2.3 Propiedades de la conexión y el tensor de curvatura 17
4 Tensores de curvatura en el espacio tangente 17
5 Reducción dimensional 20
5.1 Modos de Fourier . . . . . . . . . . . . . . . . . . . . . . . . 205.2 Reducción dimensional de la métrica . . . . . . . . . . . . . 21
5.2.1 Variación de la métrica 5-dimensional . . . . . . . . 225.3 Ansatz de Kaluza y Klein . . . . . . . . . . . . . . . . . . . 23
5.3.1 Vielbeins . . . . . . . . . . . . . . . . . . . . . . . . 235.3.2 Coecientes de anholonomía . . . . . . . . . . . . . . 255.3.3 Conexión de espín. . . . . . . . . . . . . . . . . . . . 25
5.4 Tensores de Curvatura . . . . . . . . . . . . . . . . . . . . . 265.5 Comprobaciones: . . . . . . . . . . . . . . . . . . . . . . . . 27
6 De la acción de Einstein-Hilbert a la acción de Einstein-
Maxwell-Dilatón 28
7 Conclusiones 30
8 Agradecimientos 31
2

1 Introducción
En Geometría diferencial una variedad MN es la generalización de los con-ceptos de curva y supercie de los espacios euclídeos tradicionales. Intuitiva-mente hablando una variedad MN es un espacio N-dimensional que localmentese aproxima muy bien a un espacio euclídeo pero que globalmente no es el caso,es decir, un espacio que en general es localmente plano pero que globalmente notiene porqué serlo.
1.1 Espacios Euclídeos
Sabemos que un espacio euclídeo n-dimensional es un espacio vectorial sobreel cuerpo de los reales (típicamente Rn, que corresponde al espacio euclídeoRiemanniano; aunque en nuestro caso estaremos más interesados en R1,n−1, elespacio euclídeo Lorentziano) en el cual podemos denir una base algebraica decoordenadas a partir de unos vectores base linealmente independientes:|ei〉coni = 0, 1, ..., n− 1
En el espacio euclídeo Lorentziano sabemos que podemos denir una formabilineal hermítica y denida positiva llamada producto escalar o producto in-terno, que a cada par de verctores de un espacio vectorial V asocia un númeroreal. La motivación para crear esta aplicación bilineal es dotar al espacio de unamétrica. Sabiendo que para cada par de vectores hay una y sólo una 1-formaque cumple las propiedades mencionadas y sabiendo que al conntrario tambiénes cierto, podemos interpretar a estas 1-formas como vectores en el espacio dualV ∗ de las 1-formas y por lo tanto, a los vectores originales como 1-formas delese espacio dual. Tenemos todo el derecho a hacer ese razonamiento puesto quesi como hemos dicho V ≈ V ∗ambos easpacios son isomorfos, ninguno más priv-ilegiado que el otro en cuanto que tienen las mismas propiedades matemáticaso mejor dicho, propiedades duales. En el caso es fácil comprobar que la formabilineal denida mediante la siguiente regla de actuación:
(|v〉 , |w〉) = v0w0 − v1w1...− vnwn (1)
cumple las propiedades mencionadas.Este concepto que permite dotar al espacio de una norma inducida:
‖|v〉‖2 = (|v〉 , |v〉) = gabvawb (2)
y dado que el producto interno es denido positivo, la norma también lo es. Asu vez esto permite denir la noción de distancia de la forma:
d(|v〉 , |w〉) = ‖|v〉 − |w〉‖ =√
(|v〉 , |w〉) = gabvawb (3)
donde se ha introducido explícitamente como denición el tensor métrico.
En este caso sabemos que el espacio euclídeo con signatura de la métrica de laforma (+,-,...,-) se denomina espacio de Minkowski. Lo importante para queestemos hablando de una métrica Lorentziana es que la dimensión que notamoscon el subíndice 0 tenga el signo distinto a todas las demás. Elegir la signatura
3

en la forma (+,-,...,-) ó en la forma (-,+,...,+) es puro convenio. Dicho esto,adoptaremos el convenio (+,-,...,-).
Cada punto del espacio euclídeo n-dimensional se puede identicar con una n-tupla de números que corresponden con las componentes del vector que conectael origen y el punto en cuestión, es decir, la proyección de dicho vector sobre losn-ejes coordenados.
En coordenadas cartesianas los vectores de la base |ea〉 a = 0, 1, ..., n sonortonormales, es decir, su norma (deda por (3)) es la unidad y su productointerno es nulo para cualesquiera dos vectores de la base. Por denición, losvectores de la base en estas coordenadas no varían ni en dirrección ni en módulo,es decir, cada uno es paralelo a sí mismo en cualquier par de puntos del espacioy conservan la norma. Sin embargo, en general podemos escoger unos vectoresbase que cambien de dirección en cada punto siempre y cuando exista un cambiode base (una transformación o aplicación continua que dependerá del punto delespacio, es decir de las coordenadas) que conecte esos vectores base con loscartesianos:
|e′b〉 = Mab |ea〉 (4)
donde puede ser: Mab = Ma
b (x).Esto es esencialmente lo que caracteriza al espacio euclídeo que existe un
cambio de coordenadas que es capaz de transformar los vectores base de lascoordenadas (en general curvilíneas) a los vectores cartesianos. O lo que eslo mismo, transformar la métrica plana general gab 7−→ ηab a la métrica deMinkowski (ηab).
1.2 Concepto de Variedad
Pues bien, si una variedad MNes un espacio que localmente es muy parecido alespacio plano euclídeo entonces en cada punto de una variedad N-dimensional sepueden denir una base vectorial |eµ〉 (en particular una base cartesiana) y portanto si expandimos esos vectores base podemos contruir un espacio euclídeocompleto. Pues bien si llamamos P al punto genérico en cuestión este espacioeuclídeo se denomina plano tangente a la variedad en el punto P y se simbolizapor TP (MN ). El conjunto de todos los planos tangentes de una variedad sedenomina haz tangente o T (M).
La pregunta es ahora, si una variedad en general no es un espacio global-mente euclídeo, ¾cómo podemos identicar los puntos de la variedad matemáti-camente? La respuesta a esta pregunta requiere conocimientos de topologíaque se escapan del objetivo de este trabajo pero intuitivamente digamos quese pueden denir bases de coordenadas construidas a partir de un número demapas φa (que depende de la variedad en cuestión, por ejemplo en la esferabidimensional se necesitan 21) que asocian a cada punto de una región Ua de lavariedad un punto de un abierto enRn(o en su casoR1,n−1), tales que cubren cada
1Esto es justamente el aspecto matemático del famoso Problema del cartógrafo el cual
está ampliamente desarrollado en la bibliografía.
4
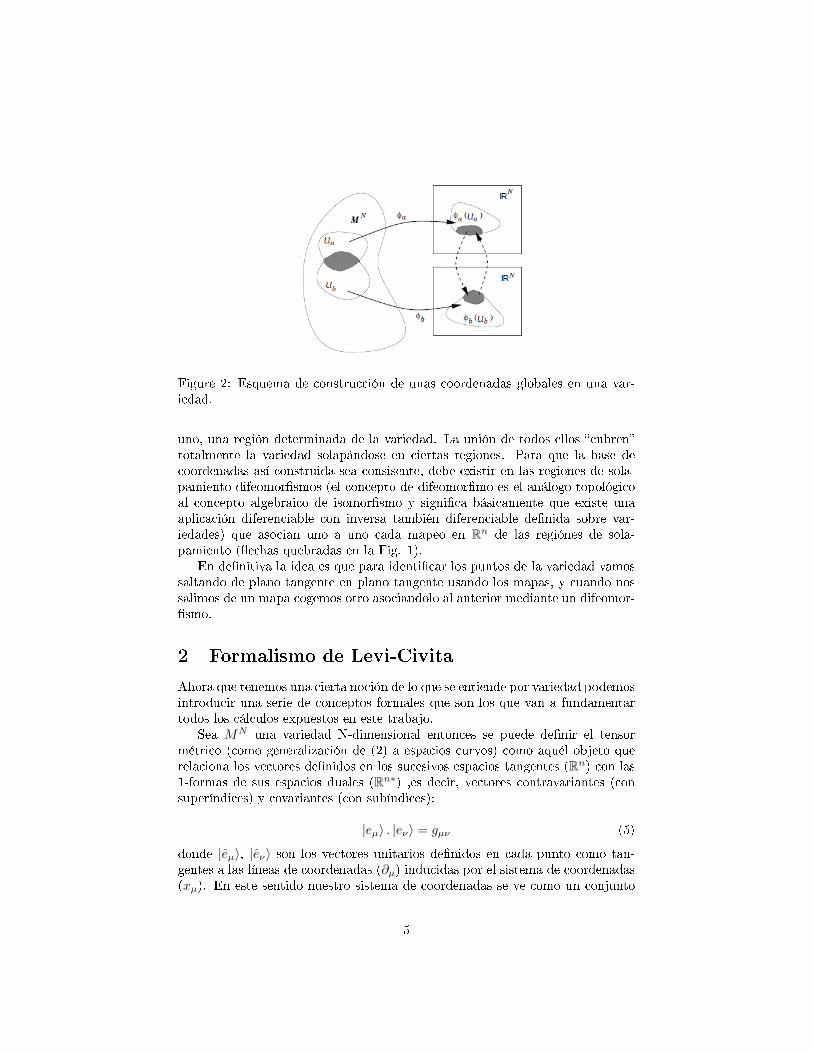
Figure 2: Esquema de construcción de unas coordenadas globales en una var-iedad.
uno, una región determinada de la variedad. La unión de todos ellos cubrentotalmente la variedad solapándose en ciertas regiones. Para que la base decoordenadas así construida sea consisente, debe existir en las regiones de sola-pamiento difeomorsmos (el concepto de difeomormo es el análogo topológicoal concepto algebraico de isomorsmo y signica básicamente que existe unaaplicación diferenciable con inversa también diferenciable denida sobre var-iedades) que asocian uno a uno cada mapeo en Rn de las regiónes de sola-pamiento (echas quebradas en la Fig. 1).
En denitiva la idea es que para identicar los puntos de la variedad vamossaltando de plano tangente en plano tangente usando los mapas, y cuando nossalimos de un mapa cogemos otro asociandolo al anterior mediante un difeomor-smo.
2 Formalismo de Levi-Civita
Ahora que tenemos una cierta noción de lo que se entiende por variedad podemosintroducir una serie de conceptos formales que son los que van a fundamentartodos los cálculos expuestos en este trabajo.
Sea MN una variedad N-dimensional entonces se puede denir el tensormétrico (como generalización de (2) a espacios curvos) como aquél objeto querelaciona los vectores denidos en los sucesivos espacios tangentes (Rn) con las1-formas de sus espacios duales (Rn∗) ,es decir, vectores contravariantes (consuperíndices) y covariantes (con subíndices):
|eµ〉 . |eν〉 = gµν (5)
donde |eµ〉, |eν〉 son los vectores unitarios denidos en cada punto como tan-gentes a las líneas de coordenadas (∂µ) inducidas por el sistema de coordenadas(xµ). En este sentido nuestro sistema de coordenadas se ve como un conjunto
5

de funciones que son diferenciables. A partir de esa denición en analogía conel espacio plano, podemos denir la noción de distancia entre dos puntos inni-tamente cercanos de la forma:
ds2 = gµνdxµdxν (6)
y por tanto se puede construir la geometría diferencial de las variedades enbase al tensor métrico. Por tanto, estamos autorizados a decir que el tensormétrico (o simplemente la métrica) contiene la información geométrica sobre lavariedad. Además esto se hará patente en lo sucesivo. Será más convenientehablar ahora de cambios de coordenadas que de cambios de base (locales) paraabstraernos de los espacios euclídeos convencionales.
2.1 Cambios generales de coordenadas
Como ha mostrado fehacientemente la Relatividad General de Einstein, Teoríade Maxwell, etc; la descripción de la física tiene que ser invariante o en generalcovariante respecto de cambios de sistema de coordenadas o sistema de referen-cia que se escoja. Por ejemplo, la variedadad Lorentziana espacio de Minkowski(este caso sí es globalmente un espacio euclídeo, de hecho es el espacio euclídeoLorentziano 4-dimensional) es el escenario en el que viven las interacciones fun-damentales de la naturaleza en la teoría del Modelo Estándar2 de física departículas elementales y se pone de maniesto que existe una simetría de lasleyes de la física respecto de rotaciones espaciales y Boosts (transformacionesde Lorentz).
Así pues sea xµ e yα dos sistema de coordenadas, el cambio de coordenadasentre los dos sistemas se puede ver como un sistema de ecuaciones (no lineal engeneral) de la forma:
xµ = xµ(yα)⇐⇒ yα = yα(xµ) (7)
La física se expresará en función de objetos matemáticos que transformenbien (covariantemente) bajo cambios generales de coordenadas, es decir, es-calares, vectores,
y en general tensores.Lo que se pretende decir aquí es que la síca debe contener, en su formulación
teórica, relaciones entre magnitudes de carácter tensorial; y en general un tensorm-veces covariante y n-veces contravariante (de orden (n,m)) transforma bajocambios generales de coordenadas de la forma:
Tµ1,µ2,...,µnν1,ν2,...,νn =
∂xµ1
∂yα1
∂xµ1
∂yα1...∂xµ1
∂yα1
∂yβ1
∂xν1∂yβ2
∂xν2...∂yβn
∂xνnTα1α2...αn
β1β2...βn
(8)
2En realidad dado que el modelo estándar es una teoría cuántica de campos, cuya princi-pal premisa es que los campos son representaciones irreducibles del grupo de Poincaré (quecontiene al grupo de Lorentz), la simetría Lorentz esta presente por construcción
6

Podemos comprobar que las propias coordenadas xµno transforman covari-antemente (la transformación (4) no puede escribirse en general como (5)) peroque sin embargo, sus diferenciales si tranforman bien : dxµ = ∂xµ
∂yα dyα.
Un objeto matemático central en física es el concepto de derivada. Laderivada como tal es un concepto intrínsecamente local, puesto que, aunquelo que pretende es comparar una magnitud en dos sitios distintos del espacio,dada su denición:
∂V ρ(x)
∂x|x=x0
= limx−→x0
V ρ(x)− V ρ(x0)
x− x0(9)
el concepto de límite hace que la derivada esté solamente denida de puntoen punto. En este caso x y x0 son dos puntos distintos de la variedad conplanos tangentes en general distintos El problema aquí es que los vectores comotales por su naturaleza solo están denidos en el plano tangente (que es elque cumple las propiedades de espacio vectorial). de este modo en (8) estamospretendiendo comparar dos vectores de distintos espacios vectoriales (o distintosplanos tangentes, o distintos puntos de la variedad, véase Fig5). Es por eso quela tarea de denir una derivada en una variedad arbitraria no es tan trivial.
En este caso estamos interesados en generalizar el concepto de derivada enespacios planos a espacios curvos y que de su denición se pueda deducir elcarácter covariante de la misma respecto de cambios generales de coordenadas.Para ello se dene la derivada Covariante en la forma:
∇µV ρ = ∂µVρ + ΓρµνV
ν (10)
Donde hemos introducido el importante concepto de conexión Γρµν . La conex-ión nos da idea de como debemos transformar un vector para ver como varíaa lo largo de la variedad o lo que es lo mismo como hacer transporte paralelo.En Rn, la conexión está presente cuando estamos interesados en utilizar co-ordenadas curvilíneas para resolver un problema. Es claro que si por ejemploqueremos estudiar la variación de un campo velocidades de un uido (campovectorial) a lo largo de todo el espacio en coordenadas cilíndricas (véase Fig.2),las componente de dicho vector respecto de los vectores base son cambiarán pordos motivos claramente distintos: el primero porque según las ecuaciones de lahidrodinámica dicten que cierta partícula debe tener una cierta velocidad enuna dirección determinada en un punto dado y el segundo porque los vectoresde la base en coordenadas cilíndricas van variando su dirección a lo largo delespacio.
Además de la necesidad de introducir esta conexión (3n funciones de lascoordenadas) necesitamos que no transforme bien bajo cambios generales decoordenadas. En efecto, la idea es que lo que necesitamos es que transformede manera opuesta a como lo hace la derivada parcial para que los términos notensoriales que aparecen en dicha transformación se cancelen y de esa forma elconjunto transforme covariantemente. Es decir, dada la forma de la transfor-mación de la derivada parcial:
7

∂µVρ 7−→ ∂′µV
′ρ =∂yα
∂xµ∂α
(∂xρ
∂yβV β)
=∂yα
∂xµ∂xρ
∂yβ∂αV
β +∂yα
∂xµ∂2xρ
∂yα∂yβV β
(11)La conexión debe transformar como:
ΓρµνVν 7−→ Γ
′ρµνV
′ν =∂yα
∂xµ∂xρ
∂yβΓβανV
ν − ∂yα
∂xµ∂2xρ
∂yα∂yβV β (12)
De esta manera de resuelve el problema. Aunque formalmente todas lasconexiones que se puedan denir tienen la misma validez, por diversas razonesprácticas tanto matemáticas como físicas (sobre todo físicas) existe un tipo deconexión que es preferida frente a todas las demás. Esta se denomina conexiónde Levi-Civita y es aquella que cumple las dos propiedades siguientes:
La conexión es simétrica:Γρµν = Γρνµ (13)
La conexión es compatible con la métrica:
∇µgνρ = 0 (14)
De estas dos propiedades se puede ver que la métrica y la conexión ya no sonindependientes y que la conexión viene dada en función de la métrica por laexpresión:
Γρµν =1
2gρλ (∂µgνλ + ∂νgλµ − ∂λgµν) (15)
Con estos conceptos aclarados ya podemos hacer un desarrollo de la ge-ometría que nos permita caracterizar la curvatura de las variedades en funciónde nuestros objetos que tranforman adecuadamente; estos son:
Por una parte:
[∇µ ,∇ν ]φ = 0
Para escalares la curvatura no se nota. Pero para vectores contravariantes ycovariantes encontramos:
[∇µ ,∇ν ]Aλ =[∂µΓλνρ − ∂νΓλµρ + ΓλµσΓσνρ − ΓλνσΓσµρ
]Aρ ≡ Rµνρ λAρ
[∇µ ,∇ν ]Bρ = −Rµνρ λBλ
Donde hemos denido:
Tensor de Rieman o tensor de curvatura:
Rµνρλ = ∂µΓλνρ − ∂νΓλµρ + ΓλµσΓσνρ − ΓλνσΓσµρ (16)
Y a partir de éste denimos :
8

Figure 3: Variación de coordenadas
Tensor de Ricci:
Rµρ = Rµλρλ = ∂µΓλλρ − ∂λΓλµρ + ΓλµσΓσλρ − ΓλλσΓσµρ (17)
Escalar de Ricci:
R = gµνRµν (18)
Estos son los objetos básicos que necesitamos para el desarrollo de este trabajo.Hasta ahora todo lo que hemos mencionado es el formalismo comúnmente cono-cido de geometría diferencial que aparece en cursos introductorios de RelatividadGeneral.
2.2 Cambios innitesimales de coodenadas
Podemos caracterizar el carácter de escalar, vector o tensor bajo cambios in-nitesimales de coordenadas haciendo uso del concepto de variación funcional.
Sea MN una variedad N-dimensional consideremos el cambio general decoordenadas entre coordenadas innitesimalmente cercanas x′µy xµ(véase gura2):
x′µ = xµ + ξµ(x) (19)
Donde ξµ(x) es un campo vectorial arbitrario pero innitesimal función de lascoordenadas xµ. Por tanto, bajo este cambio innitesimal la variación funcionalδxµ ≡ x′µ − xµ de las coordenadas viene dada por:
δxµ = −ξµ(x) (20)
Y la matriz de transformación y su inversa (hasta orden lineal en ξµ) por:
∂x′µ
∂xν= δµν − ∂νξµ ;
∂xµ
∂x′ν= δµν + ∂νξ
µ (21)
La variación funcional δψ compara el valor del campo ψ(x) en un puntoP1 en un sistema de referencia O1 con el valor ψ′(x) en otro punto P2 cuyascoordenadas en O2 son las mismas que las de P1 en O1 (véase gura 3):
9
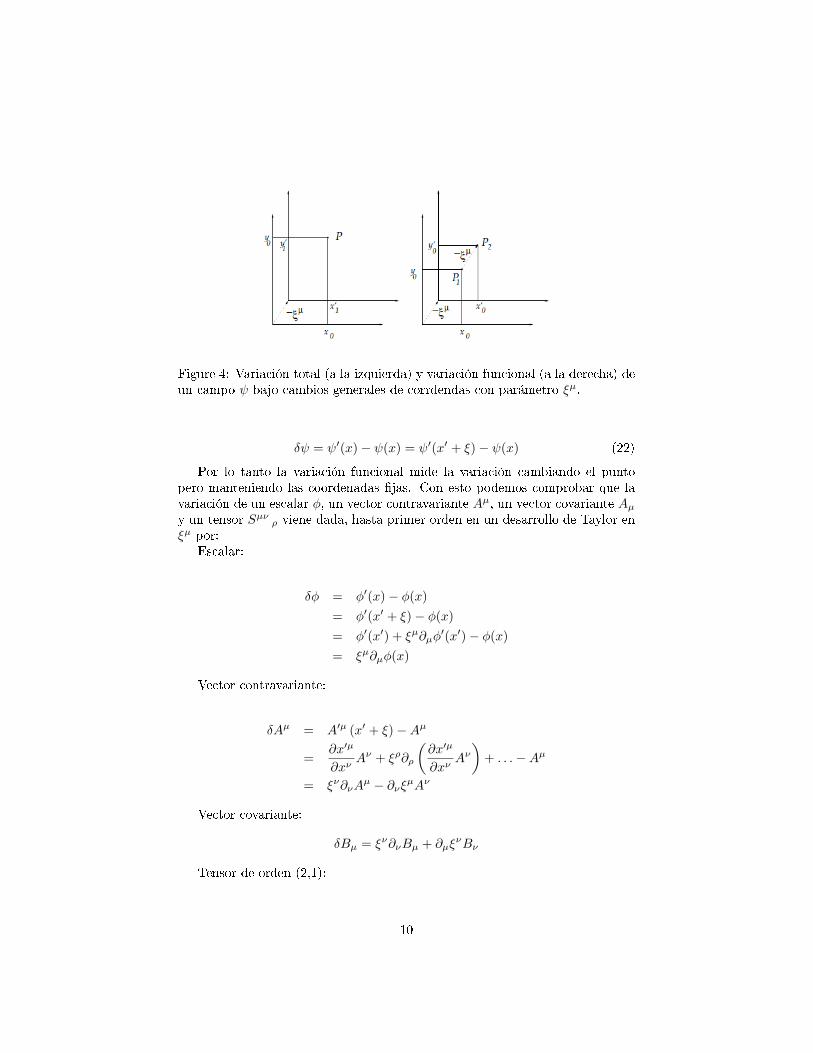
Figure 4: Variación total (a la izquierda) y variación funcional (a la derecha) deun campo ψ bajo cambios generales de corrdendas con parámetro ξµ.
δψ = ψ′(x)− ψ(x) = ψ′(x′ + ξ)− ψ(x) (22)
Por lo tanto la variación funcional mide la variación cambiando el puntopero manteniendo las coordenadas jas. Con esto podemos comprobar que lavariación de un escalar φ, un vector contravariante Aµ, un vector covariante Aµy un tensor Sµν ρ viene dada, hasta primer orden en un desarrollo de Taylor enξµ por:
Escalar:
δφ = φ′(x)− φ(x)
= φ′(x′ + ξ)− φ(x)
= φ′(x′) + ξµ∂µφ′(x′)− φ(x)
= ξµ∂µφ(x)
Vector contravariante:
δAµ = A′µ (x′ + ξ)−Aµ
=∂x′µ
∂xνAν + ξρ∂ρ
(∂x′µ
∂xνAν)
+ . . .−Aµ
= ξν∂νAµ − ∂νξµAν
Vector covariante:
δBµ = ξν∂νBµ + ∂µξνBν
Tensor de orden (2,1):
10

δSµν ρ = S′µν ρ(x)− Sµν ρ(x)
= ξλ∂λSµν
ρ − ∂λξνSµλ ρ + ∂ρξλSµν λ − ∂λξµSλν ρ
Incluso Tensor de Riemann:
δRµνρλ = R′µνρ
λ(x′) + ξη∂ηR′µνρ
λ(x′)−Rµνρ λ(x)
= ξη∂ηRµνρλ + ∂µξ
ηRηνρλ + ∂νξ
ηRµηρλ + ∂ρξ
ηRµνηλ − ∂ηξλRµνρ η
A su vez es podemos comprobar que el conmutador de dos variaciones conparámetros ξ1 y ξ2 es también una variación de parámetro ξ3 = ξν1∂νξ
µ2 −ξν2∂νξ
µ1
con lo que las variaciones funcionales denen un álgebra lo que deja entrever(aunque no es el objetivo de este trabajo) una profunda estructura matemáticasubyacente.
[δξ1 , δξ2 ]φ = δξ1δξ2φ− δξ2δξ1φ= ξ′α2 ∂
′αφ′(x)− ξα2 ∂αφ− ξ′α1 ∂′αφ′(x) + ξα1 ∂αφ
= (ξµ1∂µξν2 − ξ
µ2∂µξ
ν1) = ξν3
[δξ1 , δξ2 ]Aµ =(ξλ1∂λξ
ν2 − ξλ2∂λξν1
)∂νA
µ − ∂ν(ξλ1∂λξ
µ2 − ξλ2∂λξ
µ1
)Aν
≡ ξν3∂νAµ − ∂νξµ3Aν
≡ δξ3Aµ
[δξ1 , δξ2 ]Sµν ρ = ξλ3∂λSµν
ρ − ∂λξµ3Sλν ρ − ∂λξν3Sµλ ρ + ∂ρξλ3S
µνλ
Estas relaciones serán muy útiles para analizar el carácter tensorial de ob-jetos que construiremos más adelante en los cálculos especícos de Kaluza yKlein.
3 Formalismo de Vielbein.
3.1 Cambios de coordenadas en el espacio tangente
Hemos introducido el concepto de variedad N-dimensional (Lorentziana) comoun espacio que localmente es Rn pero que globalmente no tiene porque serlo.Hemos dicho que en cada punto P de la variedad se puede denir el plano tan-gente TP (MN ) el cual es una buena aproximación a la variedad en un entornode P. Las coordenadas xµ denen en cada punto una base |eµ〉 ; µ = 0, 1, ..., Nde TP (M), como los vectores tangentes a las líneas de coordenadas xµ, es decir,
11

Figure 5: Actuación del Vielbein en la esféra como ejemplo de variedad (Rieman-niana) bidimensional. Las componentes del vector V ρen la base de coordenadas(en negro a la derecha) se relacionan con las componentes de dicho vector en labase cartesiana arbitraria en otro punto de la variedad (en rojo a la izquierda).
∂∂xµ ; µ = 0, 1, ..., N
.Como ya se ha mencionado la base |eµ〉 o equivalente-
mente ∂µ se denomina base de coordenadas.Consideremos ahora el cambio de coordenadas entreMN y T (MN ) necesario
para pasar de la base de coordenadas (variedad estricta) a una base arbitraria|ea〉del plano tangente TP (MN ) en un punto arbitrario P:
|eµ〉 = eaµ(P ) |ea〉 ; |ea〉 = eµa(P ) |eµ〉 (23)
Los coecientes eaµ(P ) son las componentes del vector de base |eµ〉 en la base|ea〉 y parametrizan por tanto el cambio entre las dos bases. A eaµ se denomina
Vielbein y por su propia denición a eµa Vielbein inverso de la variedad MN .En Efecto en función de la ortonormalidad de los vectores base cartesianosdenidos en TP (MN ):
eaµeνa = δνµ ; eaµe
µb = δab (24)
Por tanto podemos transformar vectores contravariantes y covariantes deuna base a la otra (véase Fig.5) en la forma:
V a = eaµVµ ; V µ = eµaV
a (25)
Y también es generalizable a tensores de forma inmediata. En particulardado que la metríca es el objeto central de nuestro trabajo es importante larelación:
12
gµν = eaµebνgab ; gab = eµae
νb gµν (26)
donde gabes la métrica del haz tangente en algún sistema de coordenadas.Sin embargo, no estamos interesados aquí en utilizar coordenadas curvilíneas enel haz tangente. Para simplicar vamos a suponer a partir de ahora que la base|ea〉 es una base cartesiana y por tanto que las expresiones anteriores se reducena:
gµν = eaµebνηab ; ηab = eµae
νb gµν (27)
Estas dos expresiones son el corazón del trabajo que se está exponiendo.Ponen de maniesto que es posible ligar unívocamente la geometría de espacioscurvos y la geometría del haz tangente a través de los Vielbein. Al mismo tiemponos dan una relación de los Vielbeins con la métrica de una variedad.
Como a la izquierda de la primera igualdad se tiene al tensor métrico, sesigue que los Vielbein contienen toda la información sobre la curvatura de lavariedad almacenada en sus componentes. Esto nos dice que los Vielbeins sonalgo más profundo que simples matrices de cambio (objetos que no son físi-camente relevantes pues suponen cambios en el sistema de referencia escogido)sino que contienen toda la información sobre la geometría y curvatura intrínsecade la variedad. Dicho de otro modo, dado que la geometría de un espacio esuna propiedad intrínseca del mismo, no cambia sea cual sea el sistema de co-ordenadas o de referencia que escojamos por tanto si la métrica contiene esainformación (y por lo tanto por (23), el Vielbein también la contiene) el Viel-bein no puede ser solamente una matriz de cambio de base convencional.
El Vielbein eaµ se puede ver como un vector covariante respecto de cambios enla variedad (cambios generales de coordenadas) y como un vector contravarianterespecto de cambios de coordenadas en el espacio tangente (transformacionesde Lorentz). Hemos supuesto que tenemos una base coordenada que induce unabase cartesiana en cada plano tangente de cada punto de la variedad, es decir,en el haz tangente entero. Sin embargo, debido a la curvatura no trivial de lavariedad no existe en general una base de coordenadas para cualquier base enel haz tangente.
Los Vielvein son transformaciones que dependen de las coordenadas de lavariedad: eaµ = eaµ(x). Principalmente lo que hace el Vielbein tomar comoreferencia la base de coordenadas de la variedad xµy reproducir todas las basesde cada plano tangente mediante una rotación de la misma (en general distintaen cada punto).
En (20) podíamos haber elegido otra base cartesiana distinta de |ea〉, dig-amos |e′a〉de forma que:
|eµ〉 = e′aµ |e′a〉 ; |e′a〉 = e′µa |eµ〉 (28)
Sin embargo como estamos hablando de dos bases cartesianas en el mismopunto de la variedad, la transformación que lleba de una base a otra es unarotación o en general una transformación de Lorentz, por tanto, los Vielbein deuno y otro cambio se relacionan a través de:
13

e′aµ = Λabebµ ; e′aµ =
(Λ−1
)abeµa (29)
Estamos interesados en denir una transformación de Lorentz de todo el haztangente no solo de un punto, y más aún, que esta transformación tenga unaforma distinta para cada punto de la variedad, por tanto, en general a lo quenos vamos a referir con transformación de Lorentz a una transformación globalen cada espacio tangente pero local en el haz tangente; por lo que dependeráde las coordenadas. Podemos observar que por las ecuaciones (22) y (23) lascomponentes V ′a y V′a si transforman como vectores contra- y co-variantes bajotransformaciones de Lorentz respectivamente:
V a −→ V′a = V µe
′aµ = V µΛ
′ab e
bµ = V bΛ
′ab
Va −→ V′a = Vb(Λ−1
)ba
Un importante resultado importante, aunque a priori poco intuitivo, de la de-pendencia de los Vielbeins con las coordenadas es que en este formalismo lasderivadas parciales no conmutan:
[∂a, ∂b]φ = ∂a (eµb ∂µφ)− ∂b (eµa∂µφ)= −eµaeνb
(∂µe
cν − ∂νecµ
)∂cφ
= −Ωabc∂cφ
(30)
Donde los Ωabc son los coecientes de anholonomía.
Ahora bien, como en el caso del formalismo de Levi-Civita, como era deesperar, también aquí nos encontramos con el problema de que la derivadaparcial no es covariante , en este caso, respecto de transformaciones de Lorentz,debido precisamente a la dependencia de estas con las coordenadas:
∂µVa −→ ∂µ
(ΛabV
b)
= ∂µΛabVb + Λab∂µV
b (31)
Por tanto estamos obligados a denir un nuevo tipo de derivada que seacovariante respecto de las tranformaciones de Lorentz. La forma consistente dedenir aquí la derivada covariante Lorentz es la siguiente:
Dµφ ≡ ∂µφDµV
b ≡ ∂µVb + ωµa
bV a
DµVa ≡ ∂µVa − ωµa bVb(32)
donde hemos introducido la conexión de espín ωµab que bajo una transfor-
mación de Lorentz cambia de la forma:
ω′µab =
(Λ−1
)ca
Λbdωµcd + Λbc∂µ
(Λ−1
)ca
Esta forma de transformación de la conexión de espín se justica en el sigu-iente cálculo como una forma de cancelar el término no tensorial de la derivadaparcial de forma totalemente análoga a la discusion referente a
Es decir Dµφ es invariante, DµVb tansforma como un contra-vector y DµVa
como un co-vector. Para verlo consideremos las siguientes operaciones:
14

Escalar:
Dµφ −→ Dµφ′(x′) = Dµφ
Vector contravariante:
DµVb −→ = Dµ
(ΛbdV
d)
= ∂µ(ΛbdV
d)
+ ω′µab (ΛaeV
e)
= ΛbdDµVd
Y trivialmente igual para un vector covariante.Como en Levi-Civita, también el conmutador de las derivadas covariantes
nos dará la información necesaria sobre la curvatura de nuestra variedad:
En el caso de un escalar se verica que:
[Dµ, Dν ]φ = Dµ (∂νφ)−Dµ (∂νφ) = 0
Pero con un vector contravariante tenemos:
[Dµ, Dν ]V b = Dµ
(∂νV
b + ωνabV a
)−Dν
(∂µV
b + ωµabV a
)=
(∂µωνa
b − ∂νωµa b + ωµcbωνa
c − ωνc bωµa c)V a
= RµνabV a
Y con un vector covariante:
[Dµ, Dν ]Va = −Rµνa bVb
donde hemos denido el tensor de curvatura como:
Rµνab = ∂µωνa
b − ∂νωµa b + ωµcbωνa
c − ωvc bωµa c (33)
En particular el tensor de curvatura satisface las identidades:
Bajo cambios generales: Rµνab 7−→ R′µνa
b = ∂yµ
∂xα∂yβ
∂xνRµνab
Bajo transformaciones de Lorentz: Rµνab 7−→ R′µνa
b = ΛcaΛdbRµνab
3.2 Postulados de Vielbein
Hasta ahora solo hemos demostrado que estos objetos transforman bien bajotransformaciones de Lorentz. Sin embargo, se demuestra muy fácilmente querespecto a cambios generales de coordenadas los índices planos (latinos) per-manecen invariantes pero los índices curvos (griegos) no transforman de maneracovariante en general. Para jugar libremente con índices tanto curvos comoplanos es necesario denir la derivada completamente covariante de la forma:
dµTbν ≡ ∂µT bν − ΓρµνT
bρ + ωµa
bT aν (34)
Y por construcción se tiene que:
15

dµTbν 7−→
(dµT
bν
)′= ∂yα
∂xµ∂yβ
∂xν ΛbcdµTcν
es decir, transforma bien tanto bajo cambios generales de coordenadas comobajo cambios de coordenadas en el espacio tangente.
3.2.1 Primer postulado de Vielbein
Si aplicamos la derivada completamente covariante a un Vielbein el primer pos-
tulado de Vielbein nos dice que:
dµebν = 0 (35)
Este postulado tiene una implicación inmediata:
eaρdµVρ = dµ
(eaρV
ρ)
= dµVa (36)
, es decir, tenemos libertad para usar índices curvos o planos dentro de laderivada covariante.
Pero lo más importante es que nos permite relacionar la conexión de Levi-Civita y la conexión de espín:
dµebν ≡ ∂µe
bν − Γρµνe
bρ + ωµa
beaν = 0 =⇒=⇒ ωµa
b = Γρµνeνaebρ − eνa∂µebν
(37)
Esta relación impone a su vez la relación entre los tensores de curvatura:
Rµνρλ = Rµνa
beaρeλb (38)
Aquí puede verse de forma denitiva que los formalismos son equivalentes yno solo tienen algunas analogías. En efecto como sabemos el tensor de Riemannnos da toda la información sobre la curvatura del espacio en todos los puntos ydado que esto es así, los dos tensores de curvatura poseen la misma información.
3.2.2 Segundo postulado de Vielbein
El segundo postulado de Vielbein es equivalente a la condición de compatibilidadde la conexión con la métrica:
∇µ(eaνe
bρηab
)= 0 (39)
Es preciso aunque pueda parecer redundante imponer esta condición parala compativilidad con la métrica de forma independiente ya que no se deducedel primer postulado y sabemos que es una propiedad deseable. El segundopostulado implica además de la compatibilidad de Γρµν con gµν , la compativilidad
de ωµab con ηab. En efecto:
Dµηab = 0 (40)
16

3.2.3 Propiedades de la conexión y el tensor de curvatura
Conviene aquí demostrar algunas propiedades que serán de gran utilidad en elcálculo de Kaluza-Klein:
Antisimetría de los dos últimos índices del tensor de curvatura (arriba):
RµνabVa = Rµνa
bV a
= [Dµ, Dν ]V b
= [Dµ, Dν ](Vaη
ab)
= −Rµνa cVcηab
= −Rµν baVa =⇒
=⇒ Rµνab = −Rµν ba (41)
Antisimetría de los dos últimos índices en la conexión de espín (arriba):
ωµab = −ωµba (42)
Antisimetría de los dos últimos índices en la conexión de espín (abajo):
ωabc = −ωa cb (43)
Podemos expresar la conexión en función de los coecientes de anholonomía(24):
ωabc = eµaωµb
c
= eµa(Γρµνe
νb ecρ − eνb∂µecν
)= 1
2
[Ωad
eηbeηcd + Ωbd
eηaeηcd − Ωab
c] (44)
La parte antisimétrica de la conexión es igual al coeciente de anholonomíacambiado de signo:
ωabc − ωba c = − 1
2Ωabc + 1
2Ωbac
= −Ωabc (45)
4 Tensores de curvatura en el espacio tangente
Hemos visto que el primer postulado del Vielbein relaciona el tensor de curvaturade la conexión de espín con el tensor de Riemann a través de (38). Etonces tam-bién podremos relacionar las diferentes contracciones de ambos. En partícularpodemos contruir contruir el tensor de Ricci en el espacio tangente a partir deltensor de Ricci de la variedad y los Vielbein. Vamos ha aprobechar que loscálculos que vienen ha continuación relativamente no son demasiado extensospara ilustrar con un poco más de detalle como o cuanto se trabaja en Teoría deKaluza-Klein.
17

Tensor de Ricci con dos índices planos:
Rab = eµaRµb
= eµa(∂µωcb
c − ∂cωµb c − ωcd cωµb d + Γρµνeνcωρb
c)
= ∂aωcbc − ∂cωµb ceµa − ωcd cωab d + Γρµνe
µaeνcωρb
c
= ∂aωcbc − ∂c (ωµb
ceµa) + ∂ceµaωµb
c − ωcd cωab d
+ Γρµνeµaedρωdb
ceνc
= ∂aωcbc − ∂cωab c − ωcd cωab d
+ ∂ceµaωµb
c + Γρνµeνc edρωdb
ceµa
= ∂aωcbc − ∂cωab c − ωcd cωab d
+ ∂ceµaωµb
c +(ωνa
d + eρa∂νedρ
)ωdb
ceνc
= ∂aωcbc − ∂cωab c − ωcd cωab d + ωca
dωdbc
+ ∂ceµaωµb
c + ∂c(eρae
dρ
)ωdb
c − ∂ceρaωρb c
= ∂aωcbc − ∂cωab c − ωcd cωab d + ωca
dωdbc
Y podemos demostrar tambien (hagamoslo explícitamente para dar una ideade como es un cálculo normal en el tema que estamos tratando) que entre lostensores de Ricci de los dos formalismos existe la relación:
Rab = ∂aωcbc − ∂cωab c − ωcd cωab d + ωca
dωdbc
= eµa∂µ (eνcωνbc)− eνc∂ν (eµaωµb
c)
− eνcωνdceµaωµb
d + eνcωνadeµdωµb
c
= eµa∂µ[eνc(Γρνλe
λb ecρ − eλb ∂νecλ
)]− eλc ∂λ
[eµa(Γρµνe
νb ecρ − eνb∂µecν
)]− eµae
νc
(Γρνλe
λdecρ − eλd∂νecλ
) (Γδµξe
ξbedδ − e
ξb∂µe
dξ
)+ eµde
νc
(Γρνλe
λaedρ − eλa∂νedλ
) (Γδµξe
ξbecδ − e
ξb∂µe
cξ
)= eµa∂µ
(eνcΓρνλe
λb ecρ
)− eµa∂µ
(eνc e
λb ∂νe
cλ
)− eλc ∂λ
(eµaΓρµνe
νb ecρ
)+ eλc ∂λ (eνb∂µe
cνeµa)
− eµaeξbeνc eλdΓρνλe
cρΓ
δµξe
dδ
+ eµaeξbeνc eλdΓρνλe
cρ∂µe
dξ
+ eµaeξbeνc eλd∂νe
cλΓδµξe
dδ
− eµaeξbeνc eλd∂νe
cλ∂µe
dξ
+ eλaeξbeνc eµdΓρνλe
dρΓ
δµξe
cδ
18

− eλaeξbeνc eµdΓρνλe
dρ∂µe
cξ
− eλaeξbeνc eµd∂νe
dλΓδµξe
cδ
+ eλaeξbeνc eµd∂νe
dλ∂µe
cξ
= eµaeλb ∂µΓρρλ + eµaΓρρλ∂µe
λb
− eµaeλb ∂µ∂νe
cλeνc − eµa∂µeλb ∂νecλeνc − eµaeλb ∂µeνc∂νecλ
− eµaeνbΓρµνe
λc ∂λe
cρ − eλc ecρ∂λ
(eµae
νbΓρµν
)+ eµae
λc eνb∂λ∂µe
cν + eµae
λc ∂λe
νb∂µe
cν + eλc e
νb∂λe
µa∂µe
cν
− eµaeνbΓρρλΓλµν
+ eµaeνbΓρρλe
λd∂µe
dν
+ eµaeνbΓλµνe
ρc∂ρe
cλ
− eµaeνb eρceλd∂ρe
cλ∂µe
dν
+ eµaeνbΓλρµΓρλν
− eµaeνbΓρλµe
λc ∂ρe
cν
− eµaeνbΓρλνe
λc ∂ρe
cµ
+ eµaeνb eρceλd∂ρe
dµ∂λe
cν
= eµaeνb
(∂µΓρρν − ∂ρΓρµν − ΓρρλΓλµν + ΓλρµΓρλν
)+ eµaΓρρλ∂µe
λb
− eµaeνb eλc ∂µ∂λe
cν − eµa∂µeνb∂λecνeλc − eµaeνb∂µeλc ∂λecν
− eµaeνbΓρµνe
λc ∂λe
cρ − ∂ρeµaeνbΓρµν − ∂ρeνb eµaΓρµν
+ eµaeνb eλc ∂µ∂λe
cν + eµa∂λe
νb∂µe
cνeλc + eνb e
λc ∂λe
µa∂µe
cν
− eµaeνbΓρρλe
λd∂µe
dν
+ eµaeνbΓλµνe
ρc∂ρe
cλ
− eµaeνb eρceλd∂ρe
cλ∂µe
dν
− eµaeνbΓρλµe
λc ∂ρe
cν
− eµaeνbΓρλνe
λc ∂ρe
cµ
+ eµaeνb eρceλd∂ρe
dµ∂λe
cν
= eµaeνbRµν
+ eµaΓρρλ∂µeλb − eµaΓρρλ∂µe
λb
− eµaeλc ∂µe
νb∂λe
cν − eµaeνb∂µeλc ∂λecν
+ eµaeνb∂λe
cν∂µe
λc + eνb e
λc ∂λe
µa∂µe
cν
+ eµa∂µeνb∂ρe
cλeρceλb edν − eνb eρc∂ρeµa∂λecνeλdedµ
− ∂ρeµaeνbΓρµν − ∂ρeνb eµaΓρµν
+ eµaΓρλµ∂ρeνb eλc ecν + ∂ρe
µaeνbΓρλνe
λc ecµ
19

= eµaeνbRµν
E incluso también podemos recuperar este tensor de Ricci biplano mediantela relación:
Rabcb = eµae
νbRµνc
b
= eµaeνb
(∂µωνc
b − ∂νωµc b + ωµdbωνc
d − ωvd bωµc d)
= ∂aωbcb − ∂bωac b − ωac dωbd b + ωda
bωbcd
+ ωµcb (∂ae
µb − ∂be
µa)− ωdc bΩab d
= ∂aωbcb − ∂bωac b − ωac dωbd b + ωda
bωbcd
+ ωdcbedµ (∂ae
µb − ∂be
µa)− ωdc bΩab d
= ∂aωbcb − ∂bωac b − ωac dωbd b + ωda
bωbcd
+ ωdcb(−eµaeνb∂µedν + eµae
νb∂νe
dµ
)− ωdc bΩab d
= ∂aωbcb − ∂bωac b − ωac dωbd b + ωda
bωbcd
+ ωdcbeµae
νb
(∂νe
dµ − ∂µedν
)− ωdc bΩab d
= Rac
que es análoga a la que obteníamos en Formalismo de Levi-Civita.
Escalar de Ricci:
R = gµνRµν
=(eµae
νbηab)ecµe
dνRcd
= δcaδdb ηabRcd
= ηabRab
5 Reducción dimensional
5.1 Modos de Fourier
Para ver en que consiste la reducción dimensional consideremos un espacio deMinkowski 5-dimensional, en el cual una dirección espacial (la quinta dimensión)es compacta y periódica con radio R0tal que: x = x + 2πR0 Condición de
periodicidad. Por tanto, la quinta dimensión es topológicamente hablando igualal círculo S1. Por otro lado el espacio de Minkowski 4-dim al no tener ningunadimensión compacta es homeomorfo a R4, es decir, topológicamente identicablecon él. Por tanto estamos hablando de un espacio topológico de la forma R4∪S1.Pues bien, consideremos un campo escalar sin masa φ(xµ) en este espacio, quesatsface la ecuación de Klein-Gordon sin masa:
∂µ∂µφ(xµ) = 0 (46)
20

Dado que la dirección x es periódica, podemos expandir la dependencia de φ enx en una serie de Fourier:
φ(xµ) =∑n≥0
φn(xµ)einxR0 (47)
donde los φn(xµ) son los coecientes de Fourier, dependiente de las cuatrocoordenadas no compactas xµ. Haciendo operaciones:
∂µ∂µφ(xµ) = ∂µ∂
µ
∑n≥0
φn(xµ)einxR0
= ∂µ∂
µ
∑n≥0
φn(xµ)einxR0
+ ∂x∂x
∑n≥0
φn(xµ)einxR0
=
∑n≥0
[∂µ∂
µ (φn(xµ))−(i2n2
R20
)φn(xµ)
]einxR0
=⇒ ∂µ∂µ (φn(xµ))−
(i2n2
R20
)φn(xµ)
=⇒ ∂µ∂µ (φn(xµ))−
(m2n
~2
)φn(xµ) = 0
donde hemos denido la masa para cada modo de Fourier de la forma
m2n = n2~2
R20. Vemos que la ecuación de Klein-Gordon 5-dim sin masa se de-
scompone en un sistema de innitas ecuaciones de Klein-Gordon masivas de-sacopladas, una por cada modo de Fourier. Podemos ver que para el modo cerode Fourier, m0 = 0 y para los demás es distinta de cero. De esta forma unsolo campo en 5-dimensiones en este espacio puede manifestarse como innitoscampos masivos que solamente dependen de 4-coordenadas no compactas. Puesbien asentando nuestro argumento en el cálculo y la discusión anterior vamosa trabajar, a partir de este punto, admitiendo como premisa que la serie deFourier converge adecuadamente y que los campos físicos no dependen explíci-tamente de la quinta coordenada. En otras palabras vamos a tomar en generalque: ∂x ≡ 0 . Físicamente esto signica que tomamos la Condición de bajas
energías , es decir, E ~R0
.
5.2 Reducción dimensional de la métrica
En este apartado vamos a comprobar como una métrica 5-dimensional arbitrariareproduce resultados sorprendentes sin más que considerar las dos condicionesmencionadas en el apartado (4.1).
21

5.2.1 Variación de la métrica 5-dimensional
Vamos a calcular como se comporta cada componente que hemos distinguido dela métrica 5-dim, para ver con qué nos encontramos:
Por se un tensor (0,2), la métrica transformará en forma general como:
δξ gµν = ξλ∂λgµν + ∂µξλgλν + ∂ν ξ
λgµλ
Ahora bien componente a componente tenemos:Componente gxx:
δξ gxx = ξλ∂λgxx + ∂xξλgλx + ∂xξ
λgxλ
= ξλ∂λgxx
= ξλ∂λgxx + ξx∂xgxx
= ξλ∂λgxx
que implica que tenemos un parámetro efectivo que es 4-dimensional:=⇒ξλ = ξλ
Transforma como un escalar.Componente gµx:
δξ gµx = ξλ∂λgµx + ∂µξλgλx + ∂xξ
λgµλ
= ξλ∂λgµx + ξx∂xgµx + ∂µξλgλx
= ξλ∂λgµx + ∂µξλgλx
Componente gµν :
δξ gµν = ξλ∂λgµν + ∂µξλgλν + ∂ν ξ
λgµλ
= ξλ∂λgµx + ∂µξλgλx + ∂xξ
λgµλ
Las componentesgµx y gµν no transforman como un cuadrivector y un tensor2-covariante debido a términos adicionales. Sin embargo podemos escoger unacombinación lineal de estas componentes que si transforme de manera adecuada:
k = gxx; Aµ =gµxgxx
; gµν = gµν − gµxgνxgxx
Veámoslo:
δξAµ = ξλ∂λAµ + ∂µξλAλ
= ξλ∂λAµ + ξx∂xAµ + ∂µξλAλ + ∂µξ
xAx
= ξλ∂λAµ + ∂µξλAλ + ∂µξ
x
22

Vemos aquí una de las partes más interesantes del la teoría. En concretovemos que solo mediante la hipótesis de que la quinta dimensión es compactay que a las energías estamos acostumbrados a utilizar esa dimensión no es de-tectable (límite de bajas energías) conseguimos reproducir uno de los resultadosmás profundos de la Teoría de maxwell y es la simetría Gauge, que correspon-diente al grupo U(1), cuyo generador del grupo es una constante, en este casose puede ver que éste generador es la carga eléctrica. Además por el Tª deNoether, existe una cantidad conservada que se maniesta precisamente comola conservación de la carga eléctrica. Asique sin más que añadir una pequeñadimensión, ½conseguimos que se conserve la carga eléctrica! y como veremoscuasi-unicamos las fuerzas en una sola. Lo cual da cuenta de la gran potenciade este método que es lo realmente importante de esta obra de Kaluza y Klein.
Y por otro lado:
δξgµν = ξλ∂λgµν + ∂µξλgλν + ∂ν ξ
λgµλ
= ξλ∂λgµν + ∂µξλgλν + ∂µξ
xgxν
+ ∂ν ξλgµλ + ∂ν ξ
xgµx
= ξλ∂λgµν + ∂µξλgλν + ∂ν ξ
λgµλ
+ ∂µξx(gxν − gνx) + ∂µξ
x(gµx − gxµ)
= ξλ∂λgµν + ∂µξλgλν + ∂ν ξ
λgµλ
Por tanto hemos demostrado que k, Aµy gµν se comportan como un escalar,un vector y un tensor simétrico cuadrimensionales bajo cambios generales decoordenadas con parámetro ξλ = ξλ. Es decir después de la anterior discusiónpodemos ver a Aµy gµν como el vector electromagnético y la métrica efectiva4-dimensionales.
5.3 Ansatz de Kaluza y Klein
Para elegir la máxima generalidad y por otras razones que se entederán al naldel cálculo, tomemos como métrica inicial la siguiente métrica con dos parámet-ros libres α y β:
ds2 = e2αφgµνdxµdxν − e2βφ (dx−Aµdxµ)
2 (48)
Haciendo uso de:
gµν = eaµebν ηab (49)
ya podemos empezar a realizar calculos explícitos del Ansazt propuesto.
5.3.1 Vielbeins
Hacemos un ansatz para el cálculo del Vielbein:
23

eAµ = XAµ (50)
eXµ = Yµ (51)
eAx = 0 (52)
(Ya que en el espacio tangente tenemos cuatro grados de libertad para hacertransformaciones de Lorentz que hagan que se anule)
eXx = Z (53)
Entonces:gµν = eaµe
bνηab = eAµ e
Bν ηAB + eAµ e
Xν ηAX +
+ eXµ eBν ηXB + eXµ e
Xν ηXX =⇒
=⇒ e2αφ(gµν − e2(β−α)φAµAν
)= XA
µXBν ηAB +XA
µYXν ηAX +
+ YµXBν ηXB + YµYνηXX =
= XAµX
Bν ηAB + YµYνηXX (1)
gµx = eaµebxηab = eAµ e
Bx ηAB +
+ eXµ eXx ηXX =⇒
=⇒ −e2βφAµ = XAµ .0.ηAB +XA
µZηAX ++ Yµ.0.ηXB + YµZ (−1) (2)
gxx = eaxebxηab
=⇒ −e2βφ = −(eXx e
Xx
)=⇒
=⇒ eXx = eβφ = Z (54)
Usando 2−e2βφAµ = eβφXA
µ ηAX − eβφYµ =⇒
=⇒ Yµ = eXµ = eβφAµ (55)
Usando 1
⇒ eAµ = XAµ = eαφeaµ (56)
y por último usando la relación de los Vielbein: eaµeνa = δνµ ,tenemos:
=⇒ eνX ≡ 0 (57)
=⇒ exX = e−βφ (58)
=⇒ eνA = e−αφeνA (59)
=⇒ eXA = −e−αφAµeµa = eXA = −e−αφAa (60)
24

La bondad de los Vielbein ahora es que nos permiten calcular la métricainversa sin más que acudir a la expresión:
gµν = eµaeνbηab
=⇒ gµν = e−2αφeµaeνbηab = e−2αφgµν
=⇒ gµx = eµa exbηab =
= −e−2αφeµaAxb ηab = −e−2αφAµ
gxx = exaexbηab =
= e−2αφ(gµνAµAν − e−2(β−α)φ
)= e−2αφ
(AµA
µ − e−2(β−α)φ)
5.3.2 Coecientes de anholonomía
Recordemos que se relacionaba por (24) a partir del corchete de las derivadasparciales.
Un sencillo calculito revela que las derivadas parciales con íncices planosvienen dadas respectivamente por:
∂X = eµX ∂µ = eµX ∂µ + exX ∂x ≡ 0
∂a = eµa ∂µ = eµa ∂µ + exa∂x = e−αφeµa∂µ =
= e−αφ∂a
Es decir si en la coordenada x de la variedad ningún campo varía tampoco lohace en la coordenada X del espacio tangente y este resultado no es ni muchomenos trivial. Es resultado de la condición de bajas energías y de que el Vielbeincon 4-superíndices curvos y un subíndice plano es igual a cero.
Sabemos entonces que a partir de los Vielbein calculados en (44) hasta (52)las componentes de los coecientes de anholonomía vienen dadas por:
Ωabc =
= e−αφ [Ωabc + α∂aφδ
cb − α∂bφδca] =
= e−αφ[Ωab
c + 2α∂[aφδcb]
]donde hemos denido el corchete de dos índices covariantes como: T[µGν] ≡
12 (TµGν −GµTν). Las demás componentes son:
ΩabX = e(β−2α)φFab
donde hemos denido en esta ocasión Fab = (∂aAb − ∂bAa). Las demáscomponentes salen:
ΩaXc = 0
ΩaXX = −ΩXa
X = βe−αφ∂aφ
ΩXbc = − ΩbX
c = 0
ΩXXc = − ΩXX
c = 0
ΩXXX = −ΩXX
X = 0
5.3.3 Conexión de espín.
Sin engrosar demasiado la exposición de los cálculos (que constarían de másde un folio en cada componente calculada) las componentes de la conecxión deespín se calculan a partir de los coecientes de anholonomía como:
25

ωabc = eµaωµb
c == e−αφ [ωab
c − α∂cφηab + α∂bφδca]
ωabX = − 1
2e(β−2α)φFab
ωaXc = − 1
2e(β−2α)φF ca
ωXbc = ωbX
c − ΩXbc = − 1
2e(β−2α)φF cb
ωaXX = 0
ωXbX = βe−αφ∂bφ
ωXXc = βe−αφ∂cφ
ωXXX = 0
Comprobación de compatibilidad de ωcon ηab:
Dµηab = ∂µηab − ωµa dηdb − ωµbdηad =⇒
=⇒ ωcadηbd + ωcb
dηad = 0Componente 4-dimensional:ωca
dηbd + ωcbdηad = eµc (ωµab−ωµab) = 0
Componente 5-dimensional:ωXa
dηbd + ωXbdηad = − 1
2e(β−2α)φ [Fab + Fba] ≡ 0
5.4 Tensores de Curvatura
Atendiendo a las componentes de la conexión de espín podemos ya calcular eltensor de Ricci con dos indices planos componente a componente, siempre in-tentando sacar a la luz los respectivos tensores efectivos cuadridimensionales, esdecir, que los tensores que nos dan información sobre la variedad 5-dimensionalsean funciones de sus análogos en 4-dimensiones más otros términos. Esta enrealidad es la idea general de el cálculo que queremos hacer en este trabajoya que principalmente la métrica 4-dimensional es un objeto supuesto conocidodesde el primer momento.
Rab = ∂aωcbc − ∂cωab
c − ωabcωdc
d + ωcadωdb
c
Componentes:
Rab = e−2αφ[Rab −
(2α2 + 2αβ − β2
)∂aφ∂bφ+ α (β + 2α) (∂φ)
2ηab +
+ αD2φηab + (β + 2α)Da∂bφ−1
2e2(β−α)φFacF
cb
]
RaX =1
2e(β−3α)φ
[DbFab + 3β∂bφFab
]
RXX = −e−2αφ[βD2φ+ β (β + 2α) (∂φ)
2+
1
4e2(β−α)φFabF
ab
]
26

Escalar de Ricci:
R = ηabRab = ηabRab + ηXX RXX
= e−2αφ
[R+ 2 (3α+ β)D2φ+
(6α2 + 4αβ + 2β2
)(∂φ)2 −
1
4e2(β−α)φFabF
ab
]
5.5 Comprobaciones:
Llegados a este punto es obligado realizar algunas comprobaciones teóricas delos cálculos realizados para certicar la seguridad de los mismos a prueba deerrores. Lo más sencillo es comprobar dos de las conocidas propiedades quesatisface el tensor de Einstein, a saber, que su contracción total con la métricaes proporcional al escalar de Ricci con constante de proporcionalidad -3/2 y desu divergencia es igual a 0. Primero calculamos el tensor de Eintein y luegorealizamos las comprobaciones:
Tensor de Einstein:
Gab = Rab −1
2ηabR =⇒
Gab = e−2αφ[Gab + (2α+ β)Da∂bφ− (2α+ β)D2φηab
−(α2 + αβ − 2β2
)(∂φ)
2ηab −
[2α2 + 2αβ − β2
]∂aφ∂bφ
−1
2e2(β−α)φ
(FacF
cb −
1
8FcdF
cdηab
)]
GaX = e(β−3α)φ[
1
2DbFab +
3
2β∂bφFab
]
GXX = e−2αφ[
1
2R+ 3αD2φ+ 3α2 (∂φ)
2 − 3
8F 2e2(β−α)φ
]Contracción del tensor de Einstein con la métrica:
ηabGab = η
abGab + η
aXGaX + η
XaGXa + η
XXGXX
= e−2αφ
[−
3
2R− 3 [3α+ β]D
2φ− (∂φ)
2[9α
2+ 6αβ − 3β
2]+
3
8e2(β−α)φ
F2
]= −
3
2R
Divergencia del Tensor de Einstein:
DaGab = ηacηbdDa
(Gcd
)=⇒
27

=⇒ DaGab = ηacηbdDaGcd
= ηacηbdDaGcd + ηXXηbdDXGXd
= ηacηbdDa
[e−2αφ
[Gcd + (2α+ β)Dc∂dφ− (2α+ β)D2φηcd
−(α2 + αβ − 2β2
)(∂φ)
2ηcd −
[2α2 + 2αβ − β2
]∂cφ∂dφ
− 1
2e2(β−α)φ
(FcaF
ad −
1
8FabF
abηcd
)]]− ηbdDX
[e(β−3α)φ
[1
2DbFab +
3
2β∂bφFab
]]= 0
=⇒ DaGaX = ηacηXdDaGcd
= ηacηXXDaGcX + ηXX ηXXDXGXX
= −ηacDa
[e(β−3α)φ
[1
2DbFcb +
3
2β∂bφFcb
]]+ DX
[e−2αφ
[1
2R+ 3αD2φ+ 3α2 (∂φ)
2 − 3
8F 2e2(β−α)φ
]]= 0
Con esto probamos damos por comprobada la consistencia de los cálculosrealizados.
6 De la acción de Einstein-Hilbert a la acción de
Einstein-Maxwell-Dilatón
En este útimo apartado de calculos vamos a culminar el trabajo realizado con ladeterminación de la acción de Einstein-Maxwell a partir de la acción de Einstein-Hilbert de gravedad pura en 5 dimensiones.
La acción de Einstein-Hilbert 5 dimensional se dene como:
S =1
2k
ˆd5x√|g|R (61)
Introduciendo el escalar de Ricci de y teniendo en cuenta la condición de
periodicidad de la dimensión compacta podemos escribir:
S =1
2k
2πR0ˆ
0
dx
ˆd4x√|g|e−2αφ
[R + 2 (3α + β)D
2φ +
(6α
2+ 4αβ + 2β
2)(∂φ)
2 −1
4e2(β−α)φ
FabFab]
Haciendo uso de la relación (41) tenemos que:
|g| = |eeη| = |e| |e| = |e|2 = e4αφ |e|2 = e4αφ |g|donde en la penúltima igualdad hemos hecho uso de (44), (46) y (48). Por
tanto la métrica pasa a la forma:
28

S =1
2k
ˆd4x√|g|e(2α+β)
e−2αφ
[R + 2 (3α + β)D
2φ +
(6α
2+ 4αβ + 2β
2)(∂φ)
2 −1
4e2(β−α)φ
FabFab]
1
2k
ˆd4x√|g|eβφ
[R + 2 (3α + β)D
2φ +
(6α
2+ 4αβ + 2β
2)(∂φ)
2 −1
4e2(β−α)φ
FabFab]
1
2k
ˆd4x√|g|eβφ
[R +
(6α
2+ 4αβ + 2β
2)(∂φ)
2 −1
4e2(β−α)φ
FabFab]
1
2k
ˆd4x√|g|Dµ
(eβφ
2 (3α + β) ∂µφ)−
1
2k
ˆd4x√|g|βeβφ2 (3α + β) ∂µφ∂
µφ
donde al hacer la integración periódica ha quedado patente que: 12k =
12k
´ 2πR0
0dx = 2πR0
2k. Aquí hay un comentario que merece la pena hacer. La
constante de Newton cuadrimensional depende del radio de la dimension extra.Si hacemos el radio menor la constante de Newton cuadrimensional será mayory si hacemos el radio mayor la constante de Newton será menor. Ahora bien,sabemos que la constante de Newton cuadrimensional es pequeña y que estoimplica la debilidad de la gravedad frente a las demás fuerzas, asique esto po-dría explicarse ahora diciendo que R0 es lo sucientemente grande como paradescompensar esa la fuerza gravitatoria en comparación con las demás ya quecuando R0aumenta k disminuye. Sin embargo, cuando aumentamos R0 la fuerzaelectromagnética (que proviene de la dimensión que se está agrandando) tiende aser más y más fuerte. Por lo tanto esta explicación deja bastante que desear en elsentido de que si la dimensión compacta tiene que ser lo sucientemente grandecomo para descompensar la gravedad (muchos órdenes de magnitud como essabido) no puede ser tan pequeña como para que no la detectemos con nue-stros propios ojos.
Continuando con el cálculo por el Tª de la divergencia , la derivada total delcampo ∂µφ en el volumen del universo, se convierte en una integral del ujo deese campo a través de la supercie del universo, lo cual es imposible asique dacero. Sumando además el tercer y el primer término se obtiene:
S =1
2k
ˆd4x√|g|eβ
[R+ 2α (3α− β) (∂φ)
2 − 1
4e2(β−α)φFµνF
µν
]Este es el resultado nal del cálculo, ahora lo único que hace falta es dis-
cutir cuales deben ser los posibles valores de los parámetros α y β que mejorreproducen la conocida acción de Einstein-Maxwell. Una primera elección esβ = 0 para conseguir el Einstein Frame, es decir la acción en la forma: S =12k
´d4x√|g| [R+ ...].
La segunda elección es α = − 1√12
para conseguir la normalización canónica
del término cinético (∂φ)2. Con estas elecciones la acción coge la forma:
S =1
2k
ˆd4x√|g|[R− 1
2(∂φ)
2 − 1
4eφ√3FµνF
µν
]Con lo que nalmente vemos que acoplado no trivialmente a la acción de
Einstein-Maxwell, aparece el campo escalar φ el cual se denomina dilatón debidoa que si atendedomos a la forma de la métrica (40) vemos que la componente
29

gzz = eβφ y este es preciamente el tamaño de la quinta dimensión, es decir, an de cuentas φ no es otra cosa que el radio de la quinta dimensión.
Para hallar la dinámica de nuestro espacio podemos obtener las ecuacionesde Euler-Lagrange de esta acción en la forma:
Ecuación de Einstein:(
δLδgµν = 0
):
Rµν −1
2gµν =
√|g|∂µφ∂νφ−
1
4gµν (∂φ)
2+ e
φ√3
[FµρF
ρν −
1
4gµνF
2
] Ecuación de Maxwell ∂µ
(δL
δ(∂µAν)
)− δL
δAµ= 0:
∇µFµν = 0
Ecuación del Dilatón:∂µ
(δL
δ(∂µφ)
)− δL
δφ = 0
∂µφ−1√12eφ√3FµνF
µν = 0
Como vemos aparecen las ecuaciones de movimiento acopladas completa-mente (menos la de Maxell) al campo del Dilatón. Destacablemente vemosque ademas de las dos ecuaciones de movimiento que esperaríamos en Rela-tividad General acoplada a Teoría de Maxwell, aparece una tercera ecuación oligadura entre el Dilatón y el tensor electromagnético que no es trivial y desdeluego no se observa. Podríamos pensar en truncar el escalar de Kaluza-kleina φ = 0. Para las dos primeras ecuaciones de movimiento esto tendría ungran éxito sin embargo si nos jamos en la tercera obtendríamos: FµνF
µν = 0.Esto si es la prueba denitiva de que esta teoría no es consistente con nues-tra experiencia física. En particular sabemos que el tensor electromagnéticosatisface:F 2 ≡ FµνF
µν = 2(E2 −B2
)lo cual implica que: E2 = B2. Como
sabemos en general el módulo del campo eléctrico no es siempre igual al delcampo magnético, por tanto esta condición es inadmisible. Esta y no otra es laparte que falla de la teoría.
7 Conclusiones
Después de haber hecho tantos cálculos uno se queda con un sabor amargo alver que nalmente se queda tan cerca de unicar dos grandes teorías. Tan cercay a la vez tan lejos ya que por mucho que la acción una vez reducida se parecemucho a la acción correcta (truncando φ=0), la ligadura nunca desaparece. Espor tanto una reestructuración total de la teoría la que puede cambiar las cosas.Aún así la losofía sigue siendo la misma, crear un objetos simples de dimenton
30

mayor para obtener objetos complicados de dimensión menor mediante reduc-ción dimensional.
De todas formas, aunque la ligadura inadmisible no hubiera aparecido, sabe-mos que en ningún momento hemos introducido en esta teoría la fenomenologíacuántica, por lo que el gran sueño de la unicación parece que queda todabíamuy lejos (quizá para un doctorado más que para un trabajo de n de grado...).
La teoría de Kaluza-Klein es, más que un logro como ley física, un logro comoidea precursora para la utilización de un nuevo método en física, el método delas dimensiones extra. Este es un método tan a priori simple y elegante queen los últimos años la física en dimensiones extra ha sido la protagonista en lalabor de la unicación de las interacciones (teorías de Kaluza-Klein realistas,Teorías de cuerdas y supercuerdas).
Aún con todo el esfurzo que hicieron, ni Kaluza y Klein pensaban que pudieraexistir realmente esa dimensión extra adicional; pensaban que la física se movíaen las cuatro dimensiones habituales y que la quinta dimensión no era más queun articio matemático para poder unicar las interacciones de la física.
Sin embargo, en mi humilde opinión, todo lo que matemáticamente sea nece-sario, para que una ley física que esté corroborada, sea consistente, se debemanifestar de una u otra manera en la naturaleza. En otras palabras, no creoen los articios matemáticos. Y en la historía de la física así ha ocurrido multi-tud de veces, como por ejemplo cuando Max Karl Ernest Ludwig Planck pensóque discretizar las posibles energías era un articio matemático para evitar lacatástrofe ultravioleta.
En conclusión, creo que la realización de este trabajo de n de Grado meha otorgado, cuando menos,una gran soltura con las matemáticas en generaly en concreto con la rama de la geometría diferencial, uno de los campos másimportantes tanto de la Matemática como en mi opinión, de la Física.
8 Agradecimientos
Querría agradecer en primer lugar a mi familia, y en concreto a mi padre porhaber costeado mis estudios en estos duros momentos de crisis económica. Ensegundo agradecer a mi tutor el esfuerzo que ha hecho en organizar este trabajode n de grado, la total disposición que ha tenido en ayudarme cuando heacudido a resolver alguna sutileza en los problemas y su paciencia en paradarme la posibilidad de entregar este trabajo aún cuando la situación era muyadversa. En tercer lugar, un agradecimiento especial a mi novia y mi cuñadaque me han ayudado mucho a tener la motivación para seguir adelante en losmomentos más complicados. Por supuesto agradecer a la dirección de la Faculadporque esto no sería posible sin ellos y en particular al Sr. Vicedecano deOrdenación Académica Dº Felipe Pascual Torres que me dió el consentimientopara exeder en 6 créditos el numeró máximo de créditos matriculables parapoder matricularme del trabajo de n de grado.
31

References
[1] Carroll S.-Spacetime and geometry. An introduction to general relativity-AW (2004)
[2] R. d'Inverno-Introducing Einstein's relativity-Oxford University Press, USA(1992)
[3] Weinberg-Gravitation and cosmology_ principles and applications of GR-John Wiley & Sons, Inc. (1972)
[4] Miguel Sanchez Caja y Jose Luis Flores Dorado-Introducción a la geometríadiferencial de variedades-Depto. Geometría y Topología, Universidad deGranada, (2003)
[5] Bert Janssen-Apuntes de Relatividad General-Depto. Física Teórica y delCosmos, Universidad de Granada, (2014)
[6] http://people.physics.tamu.edu/pope/ihplec.pdf
[7] http://arxiv.org/ftp/arxiv/papers/0809/0809.1600.pdf
[8] http://www.mat.ucm.es/~cruizb/Informatica-2/Apuntes-i/Otros-Grupos/AC-Fourier.pdf
32