teoria de control observabilidad y controlabilidad
TRANSCRIPT
UNIVERSIDAD SANTIAGO DE CALI
FACULTAD INGENIERIAS
PROGRAMA DE INGENIERIA ELECTRONICA
CONTROLES II
Profesor: MSc. JAVIER A. MURILLO M.
4. CONTROLABILIDAD Y OBSERVABILIDAD DEL
ESPACIO DE ESTADOS
Los conceptos de controlabilidad y
observabilidad introducidos por
Rudolf E. Kalman (1960), así como
los métodos de optimización de R.
Belman (1957) y L. Pontryagin
(1962), fueron el origen de la teoría
del control óptimo, basada en la descripción de un sistema según el
enfoque del espacio de estados.
Estos conceptos juegan un papel fundamental en el diseño de los
sistemas de control usando las técnicas del espacio de estados. En
efecto, las condiciones de controlabilidad y de observabilidad
determinan la existencia de una solución completa para el problema
del diseño de un sistema de control. Tal vez no exista una solución a
este problema si el sistema estudiado es no controlable. Aunque la
mayoría de los sistemas físicos son controlables y observables, los
modelos matemáticos correspondientes pueden no tener la
propiedad de controlabilidad o de observabilidad. En tal caso, es
esencial conocer las condiciones bajo las cuales un sistema
controlable y observable. Veremos primero la controlabilidad y
dejaremos el análisis de la observabilidad para el final. Se acompaña
estos conceptos con algunas simulaciones realizadas en Matlab y
Simulink.
UNIVERSIDAD SANTIAGO DE CALI
FACULTAD INGENIERIAS
PROGRAMA DE INGENIERIA ELECTRONICA
CONTROLES II
Profesor: MSc. JAVIER A. MURILLO M.
4.1 MATRIZ DE CONTROLABILIDAD
Se dice que un sistema es controlable en el instante si es posible
llevarlo de cualquier estado inicial a cualquier otro estado,
empleando un vector de control no acotado, en un lapso finito.
A continuación, se obtendrá primero la condición para la
controlabilidad completa del estado y enseguida se determinará la
condición para la controlabilidad de la salida.
4.1.1. CONTROLABILIDAD COMPLETA DEL ESTADO PARA
SISTEMAS EN TIEMPO CONTINUO
Consideremos al sistema en tiempo continuo:
= Ax + Bu en donde x = vector de estado (vector de orden n)
u = vector de control ( de orden r)
A = matriz de orden n x n
B = matriz de orden n x r
Se dice que el sistema dado por la ecuación anterior es de estado
controlable en si es posible construir r señales de control sin
restricción alguna que transfieran un estado inicial a cualquier otro
estado finito en un intervalo de tiempo finito ≤ t ≤ . Si todos los
estados son controlables, se dice que el sistema es de estado
completamente controlable.

UNIVERSIDAD SANTIAGO DE CALI
FACULTAD INGENIERIAS
PROGRAMA DE INGENIERIA ELECTRONICA
CONTROLES II
Profesor: MSc. JAVIER A. MURILLO M.
Ahora obtendremos la condición para una controlabilidad completa
del estado. Sin perder la generalidad, suponemos que el estado final
es el origen en el espacio de estados y que el tiempo inicial es cero,
o .
Si el sistema es de estado completamente controlable, entonces el
rango de la matriz M de n filas y n columnas es igual al orden del
sistema.
La matriz M recibe el nombre de matriz de controlabilidad.
Pero, qué es el rango de una matriz?
Rango de una matriz: es el número de líneas de esa matriz (filas o
columnas) que son linealmente independientes.
Una línea es linealmente dependiente de otra u otras cuando se
puede establecer una combinación lineal entre ellas.
Una línea es linealmente independiente de otra u otras cuando no
se puede establecer una combinación lineal entre ellas.
El rango de una matriz A se simboliza: rang(A) o r(A).
Por ejemplo sea la matriz A una matriz de orden tres. Hallar el rango (A).
Podemos reducir la matriz multiplicando la fila uno por -3 y
sumándola a la fila dos.

UNIVERSIDAD SANTIAGO DE CALI
FACULTAD INGENIERIAS
PROGRAMA DE INGENIERIA ELECTRONICA
CONTROLES II
Profesor: MSc. JAVIER A. MURILLO M.
Intercambiamos fila 2 con fila 3
Podemos ver que las líneas son linealmente independientes. Por lo
tanto su rango es 3, y escribimos rang(A)=3.
Otro ejemplo podría ser hallar el rango de la matriz B dada por
Multiplicamos la fila 1 por -2 y la sumamos a la fila dos.
Intercambiando filas tenemos:
Tiene dos líneas linealmente independientes por lo tanto su rango es
dos y escribimos rang(B)=2.
Como se analiza la controlabilidad de un sistema? Veamos un
ejemplo:
UNIVERSIDAD SANTIAGO DE CALI
FACULTAD INGENIERIAS
PROGRAMA DE INGENIERIA ELECTRONICA
CONTROLES II
Profesor: MSc. JAVIER A. MURILLO M.
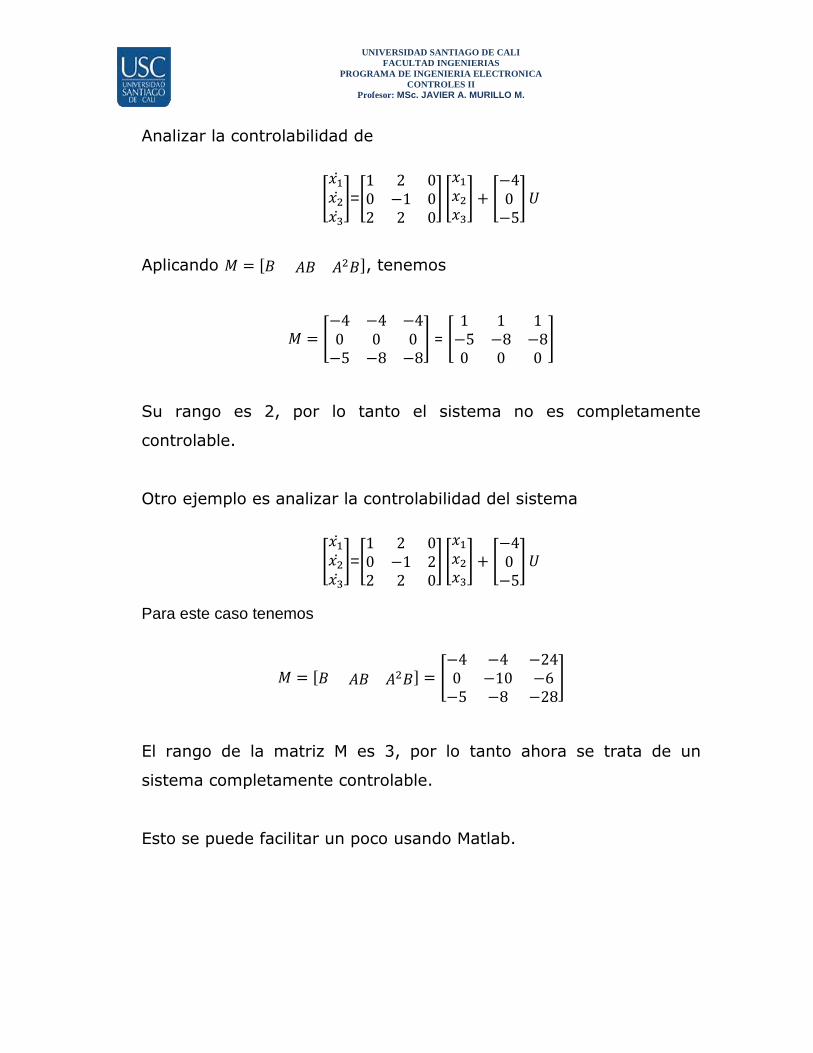
Analizar la controlabilidad de
=
Aplicando , tenemos
Su rango es 2, por lo tanto el sistema no es completamente
controlable.
Otro ejemplo es analizar la controlabilidad del sistema
=
Para este caso tenemos
El rango de la matriz M es 3, por lo tanto ahora se trata de un
sistema completamente controlable.
Esto se puede facilitar un poco usando Matlab.

UNIVERSIDAD SANTIAGO DE CALI
FACULTAD INGENIERIAS
PROGRAMA DE INGENIERIA ELECTRONICA
CONTROLES II
Profesor: MSc. JAVIER A. MURILLO M.
EJEMPLO 1
Determine si el sistema es completamente controlable.
=
>> A=[1 2 0 ; 0 -1 0; 2 2 0]
>> B=[-4; 0; -5]
>> M=ctrb(A,B)
>> rank(M)
Como el rango de M es menor que n, el sistema no es controlable de
estado completo.
EJERCICIOS
Analice la controlabilidad para:
a.
b.
Condición para la controlabilidad completa de estado en el
dominio de s:
La condición para una controlabilidad completa del estado se plantea
en términos de las funciones de transferencia o las matrices de
transferencia.
UNIVERSIDAD SANTIAGO DE CALI
FACULTAD INGENIERIAS
PROGRAMA DE INGENIERIA ELECTRONICA
CONTROLES II
Profesor: MSc. JAVIER A. MURILLO M.
Una condición necesaria y suficiente para una controlabilidad
completa de estado es que no ocurra una cancelación en la función
de transferencia o en la matriz de transferencia. Si ocurre dicha
cancelación el sistema no puede ser controlado en la dirección del
modo cancelado.
Ejemplo: Consideremos la función de transferencia siguiente:
Es obvio que ocurre una cancelación del factor en el
numerador y en el denominador de esta función de transferencia
(Por tanto se debería representar mediante una matriz A de orden
2). Debido a dicha cancelación el sistema de tercer orden no es de
estado completamente controlable.
4.1.2. CONTROLABILIDAD DE LA SALIDA DE SISTEMAS DE TIEMPO CONTINUO
En el diseño práctico de un sistema de control se pretende
normalmente controlar la salida en lugar del estado del sistema. Una
controlabilidad completa de estado no es necesaria ni suficiente para
controlar la salida del sistema. Por dicha razón es útil definir una
controlabilidad completa de la salida por separado.
Considerar el sistema descrito por:
En donde

UNIVERSIDAD SANTIAGO DE CALI
FACULTAD INGENIERIAS
PROGRAMA DE INGENIERIA ELECTRONICA
CONTROLES II
Profesor: MSc. JAVIER A. MURILLO M.
x = vector de estado (vector de orden n)
u = vector de control (de orden r)
y = vector de salida (de orden m)
A = matriz del sistema de orden n x n
B = matriz de control de orden n x r
C = matriz de salida de orden m x n
D = matriz de transmisión directa de orden m x r
Se dice que el sistema dado es de salida completamente controlable
si es posible construir un vector de control u(t) no acotado, tal que
transfiera cualquier salida inicial determinada a cualquier salida
final en un intervalo de tiempo finito ≤ t ≤ .
La condición para una controlabilidad completa de la salida es la
siguiente: el sistema descrito es de salida completamente
controlable si y sólo si la matriz de orden m x (n + 1)r.
Es de rango m.
Veamos un ejemplo con MATLAB:
UNIVERSIDAD SANTIAGO DE CALI
FACULTAD INGENIERIAS
PROGRAMA DE INGENIERIA ELECTRONICA
CONTROLES II
Profesor: MSc. JAVIER A. MURILLO M.
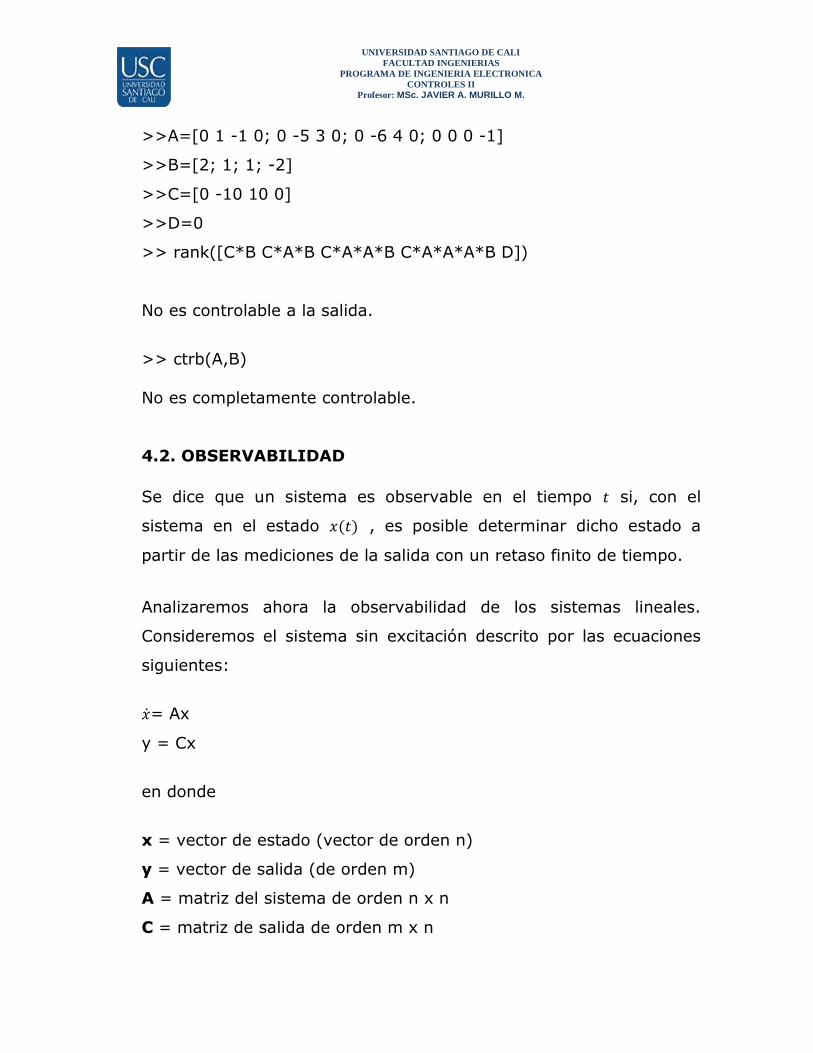
>>A=[0 1 -1 0; 0 -5 3 0; 0 -6 4 0; 0 0 0 -1]
>>B=[2; 1; 1; -2]
>>C=[0 -10 10 0]
>>D=0
>> rank([C*B C*A*B C*A*A*B C*A*A*A*B D])
No es controlable a la salida.
>> ctrb(A,B)
No es completamente controlable.
4.2. OBSERVABILIDAD
Se dice que un sistema es observable en el tiempo si, con el
sistema en el estado , es posible determinar dicho estado a
partir de las mediciones de la salida con un retaso finito de tiempo.
Analizaremos ahora la observabilidad de los sistemas lineales.
Consideremos el sistema sin excitación descrito por las ecuaciones
siguientes:
= Ax
y = Cx
en donde
x = vector de estado (vector de orden n)
y = vector de salida (de orden m)
A = matriz del sistema de orden n x n
C = matriz de salida de orden m x n
UNIVERSIDAD SANTIAGO DE CALI
FACULTAD INGENIERIAS
PROGRAMA DE INGENIERIA ELECTRONICA
CONTROLES II
Profesor: MSc. JAVIER A. MURILLO M.
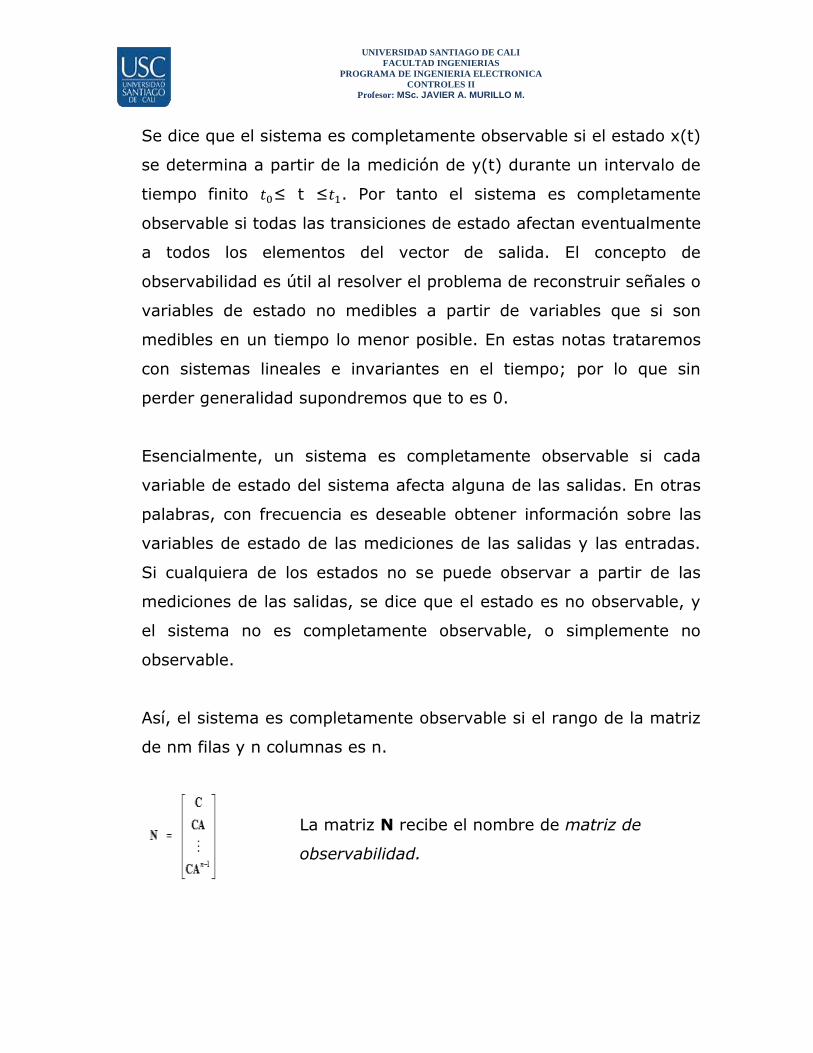
Se dice que el sistema es completamente observable si el estado x(t)
se determina a partir de la medición de y(t) durante un intervalo de
tiempo finito ≤ t ≤ . Por tanto el sistema es completamente
observable si todas las transiciones de estado afectan eventualmente
a todos los elementos del vector de salida. El concepto de
observabilidad es útil al resolver el problema de reconstruir señales o
variables de estado no medibles a partir de variables que si son
medibles en un tiempo lo menor posible. En estas notas trataremos
con sistemas lineales e invariantes en el tiempo; por lo que sin
perder generalidad supondremos que to es 0.
Esencialmente, un sistema es completamente observable si cada
variable de estado del sistema afecta alguna de las salidas. En otras
palabras, con frecuencia es deseable obtener información sobre las
variables de estado de las mediciones de las salidas y las entradas.
Si cualquiera de los estados no se puede observar a partir de las
mediciones de las salidas, se dice que el estado es no observable, y
el sistema no es completamente observable, o simplemente no
observable.
Así, el sistema es completamente observable si el rango de la matriz
de nm filas y n columnas es n.
La matriz N recibe el nombre de matriz de
observabilidad.

UNIVERSIDAD SANTIAGO DE CALI
FACULTAD INGENIERIAS
PROGRAMA DE INGENIERIA ELECTRONICA
CONTROLES II
Profesor: MSc. JAVIER A. MURILLO M.
EJEMPLO 1
Determine la observabilidad del sistema del ejemplo anterior:
>> A=[1 2 0 ; 0 -1 0; 2 2 0]
>> C=[1 0 0]
>> N = obsv(A,C)
>> rank(N)
El sistema no es observable.
EJERCICIOS
Analice la observabilidad de los siguientes sistemas:

UNIVERSIDAD SANTIAGO DE CALI
FACULTAD INGENIERIAS
PROGRAMA DE INGENIERIA ELECTRONICA
CONTROLES II
Profesor: MSc. JAVIER A. MURILLO M.
4.3. TRANSFORMACION DE MODELOS DE SISTEMAS
Consideremos la transformación del modelo del sistema basado en
su función de transferencia al espacio de estados y viceversa.
Se escribe la función de transferencia en lazo cerrado como
Una vez que se tiene la expresión, la orden de MATLAB
[A, B, C, D]=tf2ss(num,den)
Producirá una representación en el espacio de estados.
EJEMPLO 1
Supongamos que un sistema lineal de una sola entrada y una sola
salida (SISO) viene dado por la función de tranferencia:
Escribamos dicho sistema en su forma canónica controlable.
>>num=[0 -6 -30 144]
>>den=[1 14 56 160]
>>[A, B, C, D]=tf2ss(num,den)
UNIVERSIDAD SANTIAGO DE CALI
FACULTAD INGENIERIAS
PROGRAMA DE INGENIERIA ELECTRONICA
CONTROLES II
Profesor: MSc. JAVIER A. MURILLO M.
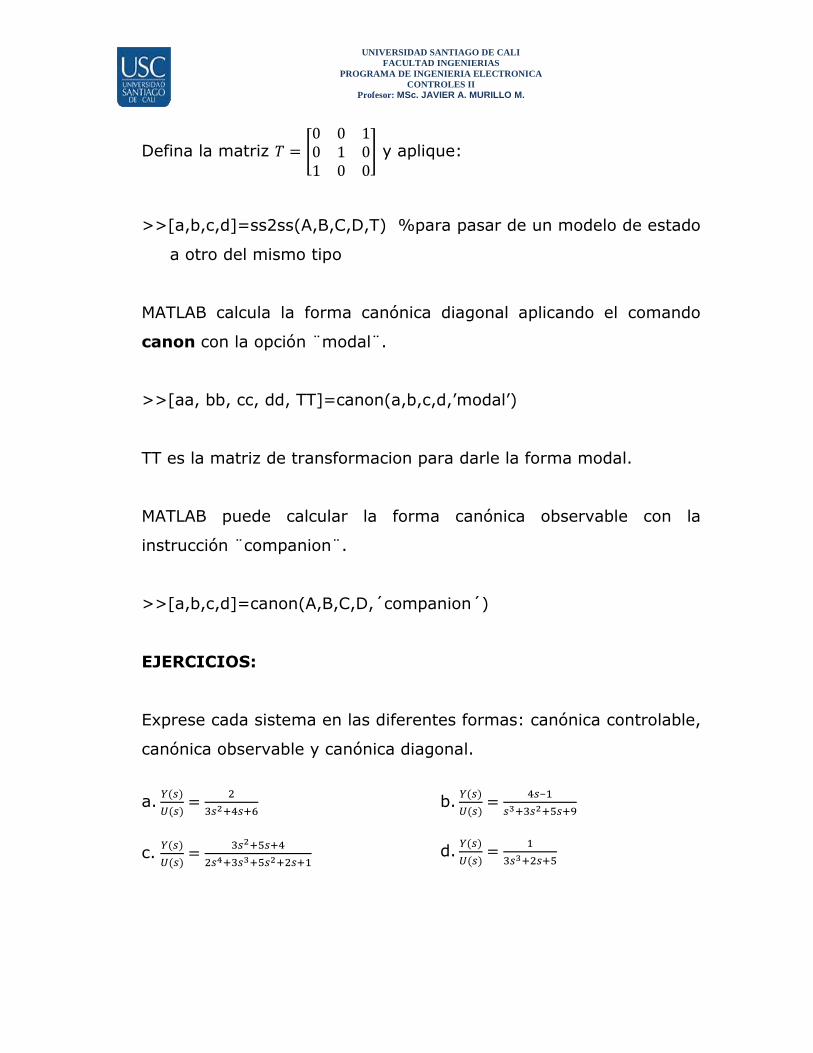
Defina la matriz
y aplique:
>>[a,b,c,d]=ss2ss(A,B,C,D,T) %para pasar de un modelo de estado
a otro del mismo tipo
MATLAB calcula la forma canónica diagonal aplicando el comando
canon con la opción ¨modal¨.
>>[aa, bb, cc, dd, TT]=canon(a,b,c,d,’modal’)
TT es la matriz de transformacion para darle la forma modal.
MATLAB puede calcular la forma canónica observable con la
instrucción ¨companion¨.
>>[a,b,c,d]=canon(A,B,C,D,´companion´)
EJERCICIOS:
Exprese cada sistema en las diferentes formas: canónica controlable,
canónica observable y canónica diagonal.
a.
b.
c.
d.

UNIVERSIDAD SANTIAGO DE CALI
FACULTAD INGENIERIAS
PROGRAMA DE INGENIERIA ELECTRONICA
CONTROLES II
Profesor: MSc. JAVIER A. MURILLO M.
4.4. ANALISIS EN EL ESPACIO DE ESTADO MEDIANTE MATLAB
Simulación 1
Obtener el espacio de estados del sistema definido por:
3 2
3 2
2 2( )
4 5 2
s s sG s
s s s
Los comandos Matlab a utilizar son:
>> num=[2 1 1 2];
>> den=[1 4 5 2];
>> [A,B,C,D]=tf2ss(num,den)
A = -4 -5 -2
1 0 0 0 1 0
B =
1 0
0
C =
-7 -9 -2
D = 2
Por lo que la ecuación de estado y de salida son:
1 1
2 2
3 3
1
2
3
4 5 2 1
1 0 0 0
0 1 0 0
7 9 2
x x
x x u
x x
x
y x
x

UNIVERSIDAD SANTIAGO DE CALI
FACULTAD INGENIERIAS
PROGRAMA DE INGENIERIA ELECTRONICA
CONTROLES II
Profesor: MSc. JAVIER A. MURILLO M.
Simulación 2
Obtener la función de transferencia del sistema definido por:
1 1
2 2
3 3
1
2
3
1 1 0 0
1 1 1 0
0 1 2 1
1 0 0
x x
x x u
x x
x
y x
x
Los comandos Matlab a utilizar son:
>> A=[-1 1 0; 0 -1 1; 0 0 -2];
>> B=[0; 0; 1];
>> C=[1 0 0];
>> D=[0];
>> [num,den] = ss2tf(A,B,C,D)
num =
0 0 -0.0000 1.0000
den = 1 4 5 2
Por lo que la función de transferencia es:
3 2
1( )
4 5 2G s
s s s
Simulación 3
Dibuje el diagrama de bloques para el sistema:

UNIVERSIDAD SANTIAGO DE CALI
FACULTAD INGENIERIAS
PROGRAMA DE INGENIERIA ELECTRONICA
CONTROLES II
Profesor: MSc. JAVIER A. MURILLO M.
Discuta la controlabilidad y la observabilidad del sistema a partir
de las matrices y verifique sus resultados manipulando las
matrices. Encuentre los valores de para los cuales el sistema
puede ser no controlable o no observable y determine los modos
correspondientes.
Vamos a dibujar el diagrama de bloques del sistema anterior con
la ayuda de matlab (simulink).
Primero que todo vamos a definir las variables de estado del
sistema esto quedaría así.
Teniendo las ecuaciones de estado pasamos al manejo de simulink
para elaborar el diagrama de bloques y así obteniendo el siguiente
resultado.
DIAGRAMA DE BLOQUES DEL SISTEMA
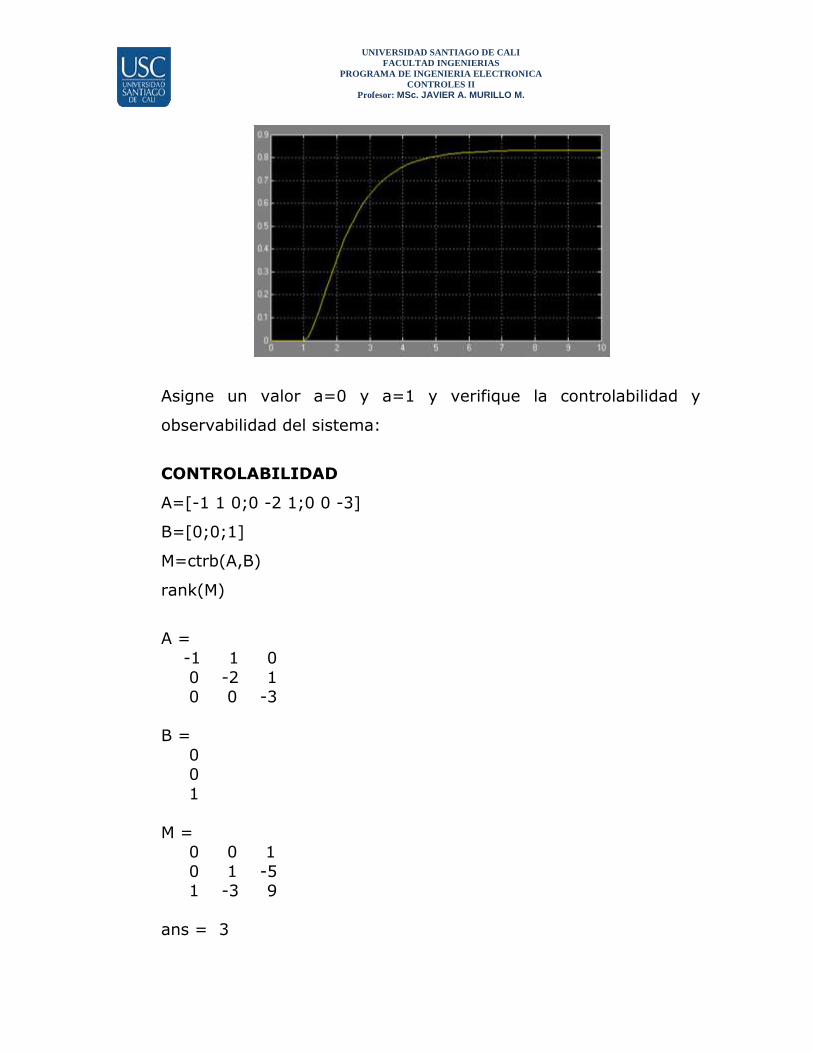
Se le asigno a=2 para probar si el sistema tiene una buena
respuesta.
UNIVERSIDAD SANTIAGO DE CALI
FACULTAD INGENIERIAS
PROGRAMA DE INGENIERIA ELECTRONICA
CONTROLES II
Profesor: MSc. JAVIER A. MURILLO M.
Asigne un valor a=0 y a=1 y verifique la controlabilidad y
observabilidad del sistema:
CONTROLABILIDAD
A=[-1 1 0;0 -2 1;0 0 -3]
B=[0;0;1]
M=ctrb(A,B)
rank(M)
A =
-1 1 0
0 -2 1 0 0 -3
B =
0 0
1
M = 0 0 1
0 1 -5 1 -3 9
ans = 3
UNIVERSIDAD SANTIAGO DE CALI
FACULTAD INGENIERIAS
PROGRAMA DE INGENIERIA ELECTRONICA
CONTROLES II
Profesor: MSc. JAVIER A. MURILLO M.
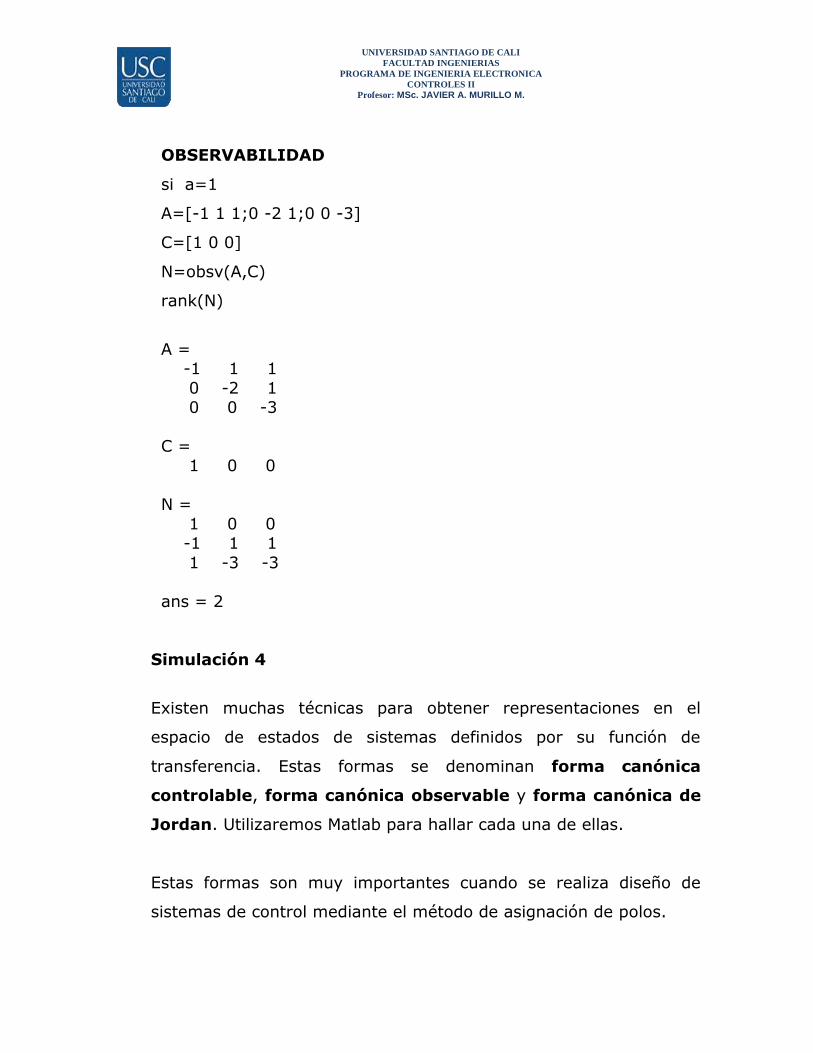
OBSERVABILIDAD
si a=1
A=[-1 1 1;0 -2 1;0 0 -3]
C=[1 0 0]
N=obsv(A,C)
rank(N)
A = -1 1 1
0 -2 1 0 0 -3
C =
1 0 0
N =
1 0 0 -1 1 1
1 -3 -3
ans = 2
Simulación 4
Existen muchas técnicas para obtener representaciones en el
espacio de estados de sistemas definidos por su función de
transferencia. Estas formas se denominan forma canónica
controlable, forma canónica observable y forma canónica de
Jordan. Utilizaremos Matlab para hallar cada una de ellas.
Estas formas son muy importantes cuando se realiza diseño de
sistemas de control mediante el método de asignación de polos.

UNIVERSIDAD SANTIAGO DE CALI
FACULTAD INGENIERIAS
PROGRAMA DE INGENIERIA ELECTRONICA
CONTROLES II
Profesor: MSc. JAVIER A. MURILLO M.
La función de transferencia de un sistema G(s) viene dada por:
a. Encuentre la forma canónica controlable, la forma canónica
observable y la forma canónica de Jordan.
Forma canoníca controlable
num=[0 1 7 10]
den=[1 8 19 122]
[A,B,C,D]=tf2ss(num,den)
T=[0 0 1;0 1 0;1 0 0]
[a,b,c,d]=ss2ss(A,B,C,D,T)
num = 0 1 7 10
den = 1 8 19 122
A =
-8 -19 -122
1 0 0
0 1 0
B =
1
0
0
C = 1 7 10
D = 0
Forma canoníca observable
[a,b,c,d]=canon (A,B,C,D,'companion')
a = 0 0 -122
1 0 -19
0 1 -8
b = 1
0
0
c = 1 -1 -1
d = 0

UNIVERSIDAD SANTIAGO DE CALI
FACULTAD INGENIERIAS
PROGRAMA DE INGENIERIA ELECTRONICA
CONTROLES II
Profesor: MSc. JAVIER A. MURILLO M.
Forma canónica de Jordan.
La forma canoníca de Jordan es lo mismo que la forma
canoníca diagonal por lo tanto aplicando matlab tenemos:
num=[0 1 7 10]
den=[1 8 19 122]
[A,B,C,D]=tf2ss(num,den)
num =
0 1 7 10
den =
1 8 19 122
A =
-8 -19 -122
1 0 0
0 1 0
B =
1
0
0
C =1 7 10
D = 0
UNIVERSIDAD SANTIAGO DE CALI
FACULTAD INGENIERIAS
PROGRAMA DE INGENIERIA ELECTRONICA
CONTROLES II
Profesor: MSc. JAVIER A. MURILLO M.
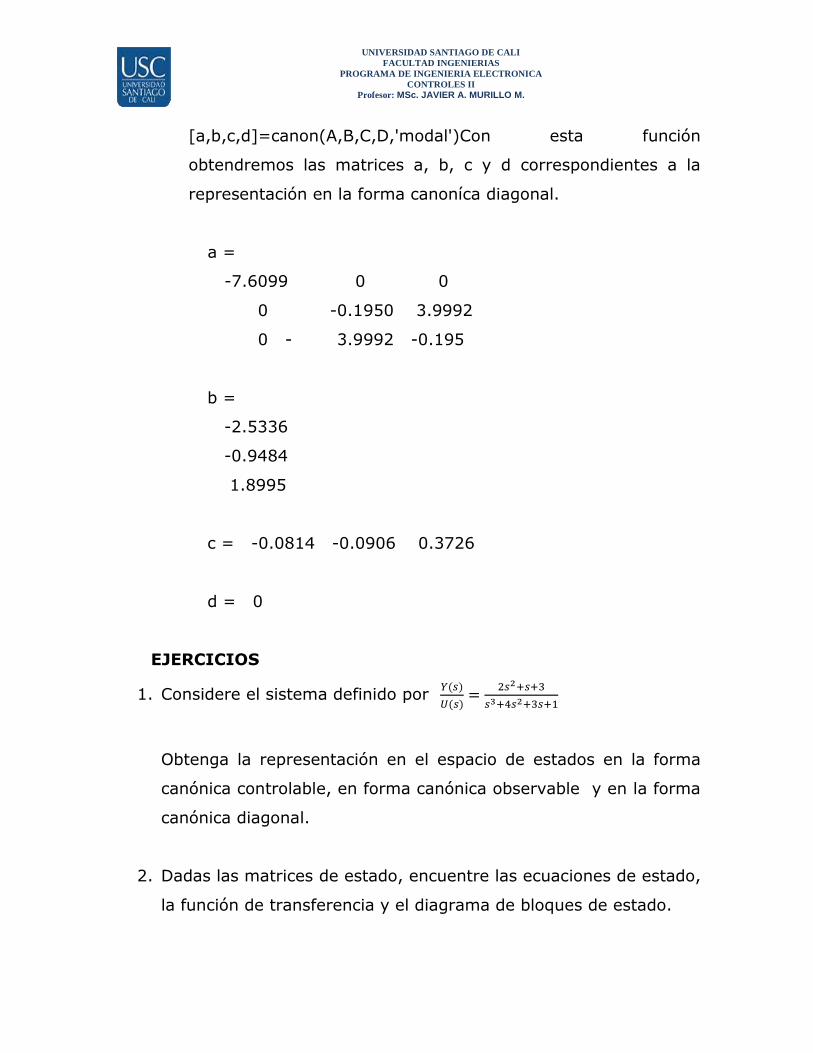
[a,b,c,d]=canon(A,B,C,D,'modal')Con esta función
obtendremos las matrices a, b, c y d correspondientes a la
representación en la forma canoníca diagonal.
a =
-7.6099 0 0
0 -0.1950 3.9992
0 - 3.9992 -0.195
b =
-2.5336
-0.9484
1.8995
c = -0.0814 -0.0906 0.3726
d = 0
EJERCICIOS
1. Considere el sistema definido por
Obtenga la representación en el espacio de estados en la forma
canónica controlable, en forma canónica observable y en la forma
canónica diagonal.
2. Dadas las matrices de estado, encuentre las ecuaciones de estado,
la función de transferencia y el diagrama de bloques de estado.

UNIVERSIDAD SANTIAGO DE CALI
FACULTAD INGENIERIAS
PROGRAMA DE INGENIERIA ELECTRONICA
CONTROLES II
Profesor: MSc. JAVIER A. MURILLO M.
3. Determina la controlabilidad y observabilidad de cada uno de los
siguientes sistemas:
a.
b.
4. Considere el sistema definido mediante
=
y=
Con excepción de una elección obvia , encuentre
un ejemplo de un conjunto de , , que haga no observable el
sistema.