technika systemowa budynku instabus eib · 2. podstawy transmisji danych. podstawą działania...
TRANSCRIPT
Paweł Petykiewicz
Technika systemowa budynkuinstabus EIB
Podstawy projektowania
Warszawa 1999 r.

Skład i łamanieArsKom02-792 Warszawaul. Lasek Brzozowy 5/30tel. (022) 648-72-59http://www.arskom.com.ple-mail: [email protected]
Druk i oprawaWZGraf00-940 Warszawaul. Grzybowska 77tel. (0-22) 620-12-61
DystrybucjaSIEMENS Sp. z o.o.03-821 Warszawaul. Żupnicza 11tel. (0-22) 870-98-13
870-98-12870-91-16
fax. 870-90-28

3
Spis treści:1. Wstęp...................................................................................................................................... 5
2. Podstawy transmisji danych.................................................................................................... 7
2.1. Rodzaje transmisji danych. .............................................................................................. 7
2.1.1. Transmisja równoległa. ............................................................................................ 8
2.1.2. Transmisja szeregowa............................................................................................... 8
2.2. Reguły przesyłu informacji............................................................................................ 10
2.2.1. Model ISO/OSI....................................................................................................... 10
2.2.2. Protokół transmisji.................................................................................................. 11
2.3. Klasyfikacja sieci. .......................................................................................................... 12
2.3.1. Topologia połączeń................................................................................................. 12
2.3.2. Metody dostępu do sieci. ........................................................................................ 15
2.3.3. Nośnik sygnału. ...................................................................................................... 16
2.3.4. Inne środki przesyłu................................................................................................ 17
3. Topologia i organizacja systemu Europejskiej Magistrali Instalacyjnej............................... 18
3.1. Topologia systemu......................................................................................................... 18
3.2. Adresowanie. ................................................................................................................. 20
3.2.1. Adres fizyczny. ....................................................................................................... 21
3.2.2. Adres grupowy (logiczny). ..................................................................................... 22
3.3. Budowa i mechanizm przesyłu telegramu. .................................................................... 23
3.3.1. Pole sterujące. ......................................................................................................... 24
3.3.2. Adres nadawcy........................................................................................................ 25
3.3.3. Adres docelowy. ..................................................................................................... 25
3.3.4. Blok kontrolny. ....................................................................................................... 25
4. Techniczna realizacja systemu instabus. .............................................................................. 26
4.1. Technologia transmisji danych. ..................................................................................... 26
4.2. Budowa elementów magistralnych. ............................................................................... 31
5. Opis przykładowych urządzeń wykorzystywanych w instalacjach. ..................................... 37
5.1. Przycisk UP 241. ........................................................................................................... 37
5.2. Przycisk UP 243. ........................................................................................................... 37
5.3. Przycisk UP 245. ........................................................................................................... 37
5.4. Przycisk UP 230. ........................................................................................................... 38
5.5. Regulator temperatury UP 252. ..................................................................................... 38
5.6. Adapter UP 220 ............................................................................................................. 39
4
5.7. Wyjście binarne N 562. ................................................................................................. 39
5.8. Wyjście binarne GE 562. ............................................................................................... 40
5.9. Wyjście binarne GE 563. ............................................................................................... 40
5.10. Wejście binarne N 261................................................................................................. 41
5.11. Wejście binarne GE 262. ............................................................................................. 41
5.12. Aktor załączająco-ściemniający GE 526. .................................................................... 41
5.13. Łącznik żaluzji typ 520................................................................................................ 42
5.14. Napęd zaworu grzejnikowego EMO............................................................................ 42
5.15. Moduł scenowy N 300................................................................................................. 43
5.16. Urządzenia do sterowania podczerwienią. .................................................................. 43
5.17. Łącze szeregowe N 148. .............................................................................................. 44
5.18. Zasilacz N 122. ............................................................................................................ 44
5.19. Sprzęgło liniowo-obszarowe N 140............................................................................. 44
6. Wprowadzenie do programu ETS. ....................................................................................... 45
6.1. Nastawy programu. ........................................................................................................ 46
6.2. Zarządzanie projektami. ................................................................................................ 46
6.3. Zarządzanie bankiem danych......................................................................................... 47
6.4. Konwersja. ..................................................................................................................... 47
6.5. Uruchamianie i testowanie. ........................................................................................... 47
6.6. Projektowanie. ............................................................................................................... 48
7. Uwagi końcowe. ................................................................................................................... 53

5
1. WstępRozwój techniki, a w szczególności układów mikroprocesorowych pociągnął za sobą
również zmiany w koncepcji budowy instalacji elektrycznej. Powodem tych zmian jest wzrostwymagań dotyczących bezpieczeństwa instalacji elektrycznej, przejrzystość struktury,oszczędności energii, oraz komfortu jej eksploatacji. W wyniku tego opracowano nowy sys-tem instalacji - Europejską Magistralę Instalacyjną EIB (European Installation Bus) , którejcelem jest spełnienie tych wymagań.
System instabus EIB jest inteligentnym, zdecentralizowanym systemem instalacjielektrycznej służącym do załączania, sterowania, regulacji i nadzoru urządzeń technicznychznajdujących się w obszarze budynku. Poziom inteligencji systemu określany jest możliwo-ściami właściwych, celowych reakcji w zależności od zmieniających się czynników zewnętrz-nych (zdarzeń, czasu). Każdy element magistralny posiada własny układ, który odpowiada zawymianę informacji pomiędzy nim a magistralą. Wymiana informacji realizowana jest za po-mocą telegramów przesyłanych pomiędzy urządzeniami. Transmisja odbywa się poprzez dwieżyły przewodu magistralnego, które służą zarazem do zasilania elementów magistralnych.Standardowym przewodem magistralnym jest ekranowana skrętka dwuparowa 0.8 mm2. Prze-sył informacji nie jest odseparowany od napięcia zasilającego 24 VDC, które jest modulowanepodczas nadawania.
Rys. 1.1 Instalacja instabus EIB.

6
Jednym z głównych zadań Europejskiej Magistrali Instalacyjnej jest integracja instala-cji, które w klasycznym wykonaniu pracują jako odrębne. Obniża to w znaczny sposób ilośćprzewodów i kabli zainstalowanych w budynku, przy zachowaniu poprzednich funkcji urzą-dzeń, a niekiedy rozszerza możliwości ich wykorzystania. Współpraca taka wiąże się równieżze wzrostem oszczędności energii. Np. czujnik otwarcia okna generuje informację, która mo-że być wykorzystana przez system antywłamaniowy, jak też przez instalację grzewczą. W tymdrugim przypadku, oszczędność energii uzyskuje się dzięki zamykaniu zaworów grzejniko-wych przy otwarciu okien.
Oprócz kilku urządzeń systemowych wszystkie elementy składają się z trzech podob-nych części tj. portu magistralnego, łącza adaptacyjnego i elementu końcowego. Urządzeniadzielą się pod względem budowy na kilka grup tzn. urządzenia do montażu podtynkowego,natynkowego, na szynę 35mm i naturalnie do wbudowania w obudowy innych urządzeń lub wlistwy elektroinstalacyjne. Najważniejszą częścią elementu magistralnego jest port magistral-ny, w którym znajduje się mikroprocesor z pamięcią i modułem komunikacyjnym. To dziękiniemu element końcowy (urządzenie) może się komunikować z innymi użytkownikami magi-strali. Elementy końcowe różnią się od siebie, również pod względem funkcjonalnym. Za-pewnia to możliwość wykorzystania magistrali do zarządzania, sterowania i nadzoru wielurożnych urządzeń. Przykładem może być sterowanie oświetleniem, żaluzjami, ogrzewaniem,klimatyzacją, wentylacją. Można do niej podłączyć urządzenia gospodarstwa domowego jakpralka, lodówka, zmywarka i wiele innych. Oprócz tego można ją łączyć za pomocą specjal-nych urządzeń sprzęgających (Gateway – ang. brama) z innymi systemami np. z siecią telefo-nii cyfrowej lub analogowej. Jako sensory czyli układy zadające, poza zwykłymi klawiszami,mogą pracować zegary, czujniki podczerwieni, światła, temperatury, wilgotności, wiatru iinne. Zapewnia to ogromną elastyczność wykorzystania wszystkich możliwości i tworzeniafunkcji kombinacyjnych.
Technika systemowa budynku z powodzeniem przyjęła się w krajach Europy Zachod-niej, szczególnie w budownictwie użyteczności publicznej. Głównym powodem stosowaniasystemu są największe możliwości obniżenia zużycia energii (do 40% oszczędności). Jest onrównież coraz chętniej stosowany w budownictwie jednorodzinnym także ze względu na pro-stotę i komfort obsługi. Polska, dążąca do standardów europejskich, jest krajem, który dopierorozpoczyna swoją drogę ku nowoczesnym instalacjom automatyki budynku.

7
2. Podstawy transmisji danych.Podstawą działania systemów mikroprocesorowych jest przetwarzanie danych, a co za
tym idzie również ich przesył. Pociąga to za sobą konieczność stosowania odpowiednich po-łączeń oraz opracowanych standardowych metod przesyłu, które zapewnią prawidłową wy-mianę informacji. Najbardziej znanym przykładem nowoczesnych systemów cyfrowej trans-misji danych są sieci komputerowe. W zależności od obszaru jaki obejmują, można poszcze-gólne rodzaje sieci podzielić na:
• GAN (Global Area Network) - sieć globalna łącząca za pomocą przeróżnych łączy sateli-tarnych i kabli morskich wszystkie kontynenty ze sobą.
• WAN (Wide Area Network) - sieci kontynentalne łączące ze sobą poszczególne kraje.Prędkość transmisji dochodzi do 100 Kbit/s.
• MAN (Metropolitan Area Network) - sieci obejmujące obszary większych miast. Rozwójtych sieci ukierunkowany jest na jak największy przesył informacji z dużą prędkościątransmisji pomiędzy 50 a 100 Mbit/s.
• LAN (Local Area Network) - sieci lokalne - samodzielne systemy, których rozległośćogranicza się zazwyczaj do obszarów poszczególnych jednostek organizacyjnych (np.biur). Odległość maksymalnie do kilku kilometrów, zaś prędkość transmisji utrzymuje sięna poziomie od 100 Kbit/s do 20 Mbit/s.
2.1. Rodzaje transmisji danych.Wspólna struktura połączeń służących do przesyłu informacji nazywana jest magistra-
lą. Umożliwia ona wymianę danych pomiędzy dużą liczbą uczestników. Konieczne jest jed-nak określenie zasad sterowania komunikacją.
Rys. 2.2 Różnica pomiędzy transmisją szeregową a równoległą.
8
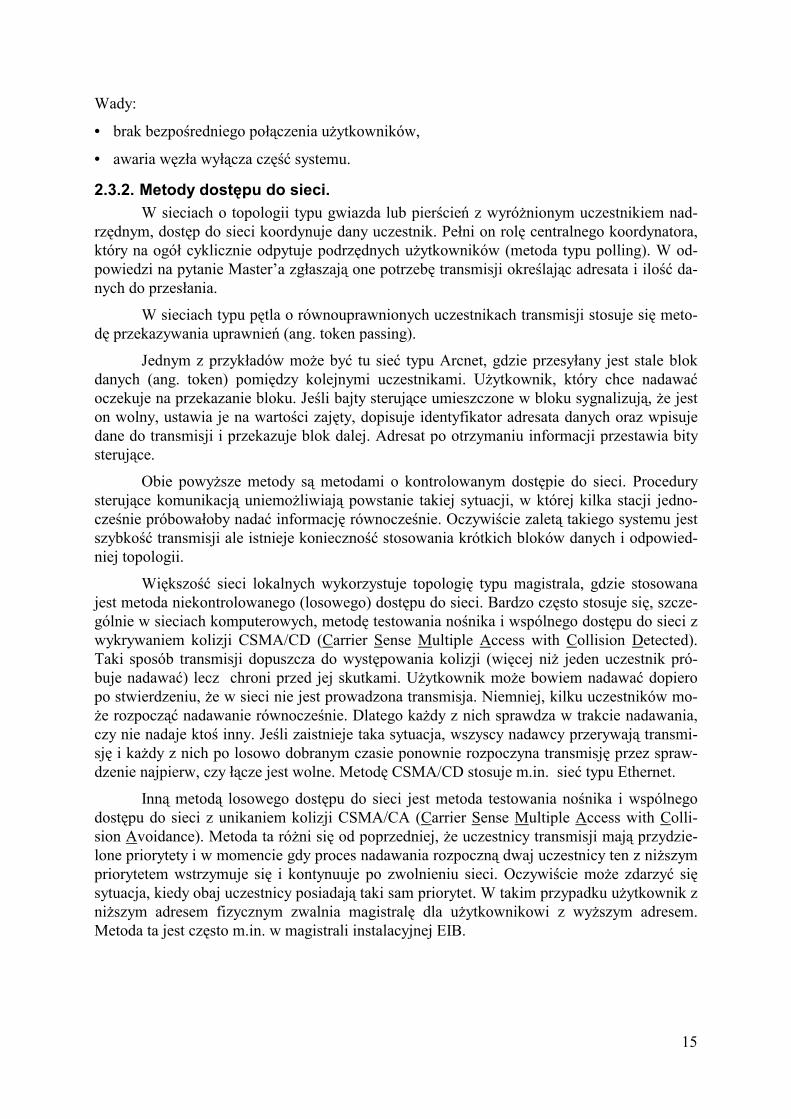
Wyróżniamy zasadniczo dwa rodzaje sposobów transmisji danych: transmisję równo-ległą i szeregową. Podstawowe różnice pomiędzy nimi to:
• koszty,
• pojemność przesyłu,
• zabezpieczenia transmisji,
• maksymalna, pokonywana przez informację odległość,
• elastyczność.
Obie technologie przesyłu informacji wymagają układu pozwalającego przyłączyć sięmechanicznie i elektrycznie do magistrali.
2.1.1. Transmisja równoległa.Układ transmisji równoległej składa się z szyny danych, szyny adresowej oraz szyny
sterującej. W kolejnych taktach zegara po szynie danych przesyłane są wszystkie bity kolej-nych słów naraz, każdy bit odrębnym przewodem. Wymaga to istnienia co najmniej ośmiuprzewodów, gdyż najmniejszym słowem jest jeden bajt (osiem bitów). Na tej zasadzie osiągasię wysoką prędkość transmisji (bit/s), tym większą im szersza jest szyna. W chwili obecnejstosuje się na codzień już szyny 32 bitowe np. PC EISA. Oznacza to, że przy jednym takciezegara przesyła się jednocześnie cztery bajty.
Szyna sterowania zapewnia nam synchronizację nadajnika i odbiornika. W trybie pra-cy jednokierunkowej wymagane są dwie linie sterujące, jedna sygnalizująca gotowość pracynadajnika, druga gotowość odbioru odbiornika. Obustronna sygnalizacja gotowości pracy na-dajnika i odbiornika gwarantuje, że żaden z przesyłanych bajtów danych nie zostanie zgubio-ny ani tez przeczytany dwukrotnie. Odpowiednio do pracy w trybie dwukierunkowym po-trzebne są cztery linie sterujące dwie dla synchronizacji wprowadzania danych i dwie dla wy-prowadzania danych.
Transmisja równoległa oprócz wymagania w postaci dużej ilości linii (przewodów)posiada jeszcze jedną wadę. Przy dużych szybkościach przekazywania danych na duże odle-głości istotnym ograniczeniem stają się problemy techniczne związane z różnymi prędko-ściami rozchodzenia się sygnałów w nieidentycznych przewodach oraz z przesłuchami wystę-pującymi między sąsiadującymi liniami. Dlatego też znajduje ona zastosowanie głównie przyniewielkich odległościach przesyłu np. wewnątrz jednostki centralnej komputera.
2.1.2. Transmisja szeregowa.Metoda transmisji szeregowej oferuje możliwość większego oddalenia użytkowników
od siebie oraz mniejsze koszty okablowania (mniej żył).
Różni się od poprzedniej tym, że pojedyncze bity informacji są przesyłane jeden podrugim tym samym przewodem (nośnikiem) i muszą być odczytywane przez odbiornik do-kładnie w tempie nadawania, gdyż inaczej niektóre bity mogłyby zostać zgubione lub odczy-tane dwukrotnie. Obustronna sygnalizacja gotowości przy przekazywaniu każdego bitu niejest stosowana, gdyż zwolniłaby znacznie szybkość transmisji a ponadto wymagałaby dodat-kowo przynajmniej dwóch przewodów sterujących. Podstawową trudnością transmisji szere-gowej danych jest więc zapewnienie synchronizacji pracy nadajnika i odbiornika. Zastosowa-nie zegarów o takiej samej częstotliwości w nadajniku i odbiorniku nie rozwiązuje problemu,

9
ponieważ w długich okresach czasu nawet najmniejsze różnice w częstotliwościach zegarówdoprowadziłoby do rozsynchronizowania się urządzeń.
W praktyce stosuje się dwa sposoby organizacji transmisji szeregowej: synchroniczną iniesynchroniczną.
Transmisja synchroniczna wymaga poprowadzenia pomiędzy nadajnikiem i odbiorni-kiem dodatkowej linii synchronizującej, po której przekazywany jest wspólny dla urządzeńsygnał zegara. Sygnał ten może być generowany przez nadajnik, odbiornik lub przez zegarzewnętrzny. Rozwiązanie to gwarantuje tę samą prędkość pracy odbiornika i nadajnika iumożliwia rozpoznawanie poszczególnych bitów słowa. Metoda ta jest stosowana rzadko itylko do przesyłu informacji na nieduże odległości.
Transmisja asynchroniczna nie wymaga żadnych dodatkowych połączeń sterującychpomiędzy nadajnikiem i odbiornikiem. Każde przekazywane słowo danych zaopatrzone jest wdodatkowe znaczniki początku i końca słowa. Zarówno nadajnik jak i odbiornik posiadająwłasne zegary, nastawione na tę samą częstotliwość. Zegar odbiornika uruchamia się w mo-mencie wykrycia znacznika początku słowa i zatrzymuje się przyjąwszy znacznik końca. Po-nieważ przekazywane słowa danych składają się z reguły z 5 do 9 bitów, nie licząc znaczni-ków, zegary w tak krótkim czasie nie zdążą się rozsynchronizować. Jednak brak przewodusynchronizującego powoduje obniżenie prędkości transmisji.
Ze względu na duże odległości transmisji szeregowej istnieje możliwość występowa-nia zakłóceń oraz przekłamań informacji. Z tego powodu konieczne jest zastosowanie mecha-nizmów kontroli. W układach transmisji synchronicznej stosuje się motodę kodowania z kon-trolą CRC przy użyciu nadmiarowych słów kontrolnych, zaś w transmisji synchronicznejprostszą lecz również mniej pewną metodę sprawdzania parzystości.
Rys. 2.3 Transmisja szeregowa synchroniczna.
Rys. 2.4 Transmisja szeregowa asynchroniczna

10
Wyróżnia się sprawdzanie parzystości „wprost” i „nie wporst”. Różnica pomiędzy ty-mi metodami polega na tym, że w przypadku kontroli „wprost” bit parzystości zostaje takdobrany aby suma bitów danych i bitu parzystości wynosiła zero, zaś dla kontroli „nie wprost”jeden. Ta pierwsza metoda sprawdzenia parzystości jest najprostszym i najszerzej stosowa-nym w komunikacji cyfrowej sposobem sprawdzania poprawności odbieranej informacji.
2.2. Reguły przesyłu informacji.Tak jak już wspomniano wcześniej, aby informacja mogła być przesłana w sieci od
nadawcy do odbiorcy nie wystarczy połączenie elektryczne obu uczestników transmisji. Wy-miana informacji pomiędzy nimi musi podlegać pewnym regułom.
2.2.1. Model ISO/OSIW roku 1984 opublikowany został przez ISO (International Standards Organization)
model komunikacji dla systemów otwartych OSI (Open Systems Interconnection). Stał się onpodstawą do opisywania systemów komunikacji, głównie komputerowej. Stosuje się go rów-nież do sieci przemysłowych.
Model ten jest podzielony na siedem warstw, każda z nich definiuje zbiór usług izwiązanych z nimi protokółów (zasad komunikacji), manipulowania informacją na poziomietej warstwy. Każda warstwa otrzymuje informacje z bezpośrednio niższej warstwy i przeka-zuje ją do bezpośrednio wyższej lub na odwrót. Ponieważ zdefiniowano wiele różnorodnychczynności dla każdej warstwy, model ten może być dopasowany do szerokiej gamy sprzętu ioprogramowania sieciowego. Takie warstwowe ułożenie funkcji i protokółów daje podstawękomunikacji pomiędzy odmiennymi typami sprzętu i oprogramowania sieciowego.
Warstwa fizyczna - zapewnia fizyczne dołączenie (okablowanie) do przepływu danych po-między urządzeniami sieci. Definiuje elektryczne i mechaniczne połączenia (złącza) z syste-mem okablowania sieci oraz funkcje zajmujące się właściwą transmisją bitów danych pomię-dzy urządzeniami w sieci.
Rys. 2.5 Model ISO/OSI

11
Warstwa łącza - określa metody kontroli dostępu do okablowania. Warstwa łącza określapodstawowe jednostki informacji (zwane pakietami) oraz metody tworzenia, wysyłania i od-bierania tych pakietów. Warstwa ta ma zapewniać bezbłędną komunikację pomiędzy urzą-dzeniami sieciowymi.
Warstwa sieciowa - określa, w jaki sposób dane są kierowane z jednego urządzenia do dru-giego. Może również ukrywać niższe warstwy przed wyższymi, umożliwiając temu samemuoprogramowaniu górno-warstwowemu wykorzystanie różnych rodzajów sprzętu sieciowego.Ponadto, w warstwie tej dane mogą być kierowane z jednego sprzętu sieciowego do innego.
Warstwa transportowa - określa procedury rozpoznawania błędów, korekcji ich oraz wyma-gania dotyczące powtórzeń informacji.
Warstwa sesji - koordynuje współdziałanie między funkcjami i programami użytkowymiwykonywanymi na różnych urządzeniach sieciowych.
Warstwa prezentacji - określa konwersje kodu i dopasowania formatów danych dla progra-mów użytkowych.
Warstwa aplikacji - zajmuje się usługami sieciowymi i komunikacją użytkownika z siecią.
W sieciach przemysłowych, np. sieci sterowników programowalnych PLC, nie ma po-trzeby stosowania rozbudowanych systemów transmisji jak to jest w sieci komputerowej. Zreguły ich obszar ogranicza się do stosowania warstw: fizcznej, łącza, transportowej orazaplikacji.
2.2.2. Protokół transmisji.Komunikacja sieciowa odbywa się na zasadzie przesyłania pakietów. Zanim dane zo-
staną przemieszczone z jednego urządzenia sieciowego do innego, są umieszczane w małychjednostkach informacji. zwanych pakietami. Jeśli strumień danych jest większy niż pojemnośćpojedyńczego pakietu, dane te są umieszczane w wielu pakietach.
Zasady transmisji zwane protokołem opisują zakres, rodzaj i kolejność informacji jakapowinna zostać przesłana po sieci. Określają one m.in. budowę telegramu (komunikatu).Przykładami normowanych protokołów są: MAP (Manufacturing Automation Protocol) orazTOP (Technical and Office Protocol).
Standardowy telegram składa się z nagłówka, rdzenia i części kontrolnej. W nagłówkuznajduje się adres nadawcy i odbiorcy telegramu, dane sterujące takie jak np. długość infor-macji właściwej czy też znacznik powtórzeń umieszczany w telegramie powtarzanym przywadliwej transmisji, potrzebny do rozróżnienia typów wiadomości. W nagłówku umieszczasię również niekiedy bity priorytetu wiadomości. Pozwala to w momencie zawieszenia syste-mu lub zapętlenia procesu awaryjne, ręczne sterowanie urządzeniami za pomocą telegramówo najwyższym priorytecie.
Rdzeń telegramu zawiera właściwą informację przesyłaną. W zależności od rodzajutelegramu mogą one mieć albo stałą (telegramy krótkie) albo zmienną długość (telegramydługie).
Rys. 2.6 Budowa telegramu

12
W skład bloku kontrolnego, znajdującego się zazwyczaj na końcu telegramu, wchodząinformacje zabezpieczające prawidłową transmisję danych. Na podstawie tych informacji od-biorca telegramu może określić czy dane zawarte w telegramie, który otrzymał nie zawierająbłędów. Sprawdzenie takie jest konieczna, gdyż w niektórych przypadkach błędna informacjamoże być odczytana przez odbiornik jako prawidłowa lecz o zupełnie innym znaczeniu.
Najbardziej znaną metodą kontroli jest bit parzystości umieszczany na końcu pakietu(paczki danych, ramki). Parzystość określa się „wprost. Rodzaj takiej kontroli określany jestmianem parzystości wszerz (VRC - Vertical Redundancy Check).
W przypadku transmisji wieloramkowej (wielopakietowej), pomimo sprawdzenia pa-rzystości dla każdej ramki istnieje możliwość występowania błędów transmisji. Dochodzi dotego, gdy błąd wystąpi na miejscu dwóch bitów (lub innej parzystej liczby). Dlatego opróczsprawdzenia każdej ramki wszerz, wszystkie ramki są sprawdzane pionowo - wzdłuż (LRC -Longitudinal Redundancy Check). Wynik pionowej kontroli parzystości zostaje zapisany wczęści kontrolnej. Zazwyczaj określenie parzystości wzdłuż odbywa się na zasadzie „niewprost”.
Połączenie obu metod nazywa się to metodą sprawdzenia krzyżowego i zapewnia naj-większą pewność wykrycia błędów transmisji.
2.3. Klasyfikacja sieci.Powstanie i rozwój sieci odbywał się i trwa nadal wielotorowo. Wynikiem tego było
powstanie różnego rodzaju sieci, które różnią się pomiędzy sobą topologią, rodzajem dostępu,sposobem nadzoru oraz nośnikiem. Proces standaryzacji sieci lokalnych pozwolił na połącze-nie ich w większe struktury (MAN, WAN, GAN).
2.3.1. Topologia połączeń.Podstawowym sposobem klasyfikacji sieci jest rodzaj topologii sieci tzn. rodzaj połą-
czeń pomiędzy uczestnikami transmisji (użytkownikami). Od rodzaju topologi zależy nie tyl-ko sposób okablowania lecz również prędkość transmisji, podatność na zakłócenia, sposóbzarządzania siecią oraz sposób zabezpieczeń transmisji. Zasadniczo można je podzielić nadwie grupy:
• punkt - punkt,
• systemy magistralne.

13
2.3.1.1. Punkt - punkt.Sieć ta łączy bezpośrednio uczestników
ze sobą za pomocą przewodów szeregowych (np.RS 232). Zaletami tego rozwiązania jest możli-wość natychmiastowego, bezkolizyjnego przeka-zywania telegramów. Ponadto w przypadku prze-rwania jednego z połączeń nie traci się kontaktuz innymi uczestnikami. Niestety przy większejilości uczestników transmisji sieć połączeń nad-miernie się komplikuje ponieważ każde połącze-nie wymaga oddzielnego przewodu i oddzielnegoportu komunikacyjnego. Rozwiązanie to nie jestpraktycznie wykorzystywane na dużą skalę.
2.3.1.2. Gwiazda.Stosuje się ją zazwyczaj w przypadku gdy
jeden z uczestników posiada większą moc oblicze-niową od pozostałych i pełni rolę uczestnika nad-rzędnego (Master). Komunikacja odbywa się nazasadzie punkt - punkt. Albo Master po kolei komu-nikuje się z jednostkami podrzędnymi (Slave), zpotwierdzeniem lub bez albo łączy się ze Slave’mpo wywołaniu go.
Zalety:
• uszkodzenie jednego Slave’a nie wpływa nadziałanie reszty sieci.
Wady:
• brak bezpośredniego połączenia wszystkichuczestników,
• uszkodzenie Master’a powoduje całkowite unie-ruchomienie sieci,
• wysokie koszty okablowania.
Rys. 2.7 Połączenie punkt-punkt
Rys. 2.8 Połączenie typu gwiazda.

14
2.3.1.3. Pierścień.Przy takim połączeniu wszyscy uczestnicy mogą
być równouprawnieni, zaś komunikacja odbywa sięprzez przekazywanie telegramu sąsiednim uczestnikom,tak aż dotrze do odbiorcy.
Zalety:
• prosta realizacja,
• niski koszt okablowania.
Wady:
• brak bezpośredniego połączenia wszystkich uczestni-ków,
• uszkodzenie jednego użytkownika .
2.3.1.4. Magistrala.Wszyscy uczestnicy są połączeni za pomocą jednego wspólnego łącza. W jednej
chwili czasowej można przesyłać tylko jedną wiadomość.
Zalety:
• bezpośrednie połączenie wszystkich uczestników,
• uszkodzenie jednego z uczestników nie wpływa na resztę sieci,
• łatwość rozbudowy.
Wady:
• Przerwanie kabla magistralnego powoduje całkowite uszkodzenie sieci.
2.3.1.5. Struktura drzewiasta.Struktura ta jest połączeniem wcześniej omawianych topologii. Wiadomość jest trans-
portowana od nadawcy do węzła i dalej do wszystkich użytkowników systemu magistralnego.
Zalety:
• dobre dopasowanie do wymagań budynku.
Rys. 2.9 Połączenie typu pier-ścień
Rys. 2.10 Magistrala.
15
Wady:
• brak bezpośredniego połączenia użytkowników,
• awaria węzła wyłącza część systemu.
2.3.2. Metody dostępu do sieci.W sieciach o topologii typu gwiazda lub pierścień z wyróżnionym uczestnikiem nad-
rzędnym, dostęp do sieci koordynuje dany uczestnik. Pełni on rolę centralnego koordynatora,który na ogół cyklicznie odpytuje podrzędnych użytkowników (metoda typu polling). W od-powiedzi na pytanie Master’a zgłaszają one potrzebę transmisji określając adresata i ilość da-nych do przesłania.
W sieciach typu pętla o równouprawnionych uczestnikach transmisji stosuje się meto-dę przekazywania uprawnień (ang. token passing).
Jednym z przykładów może być tu sieć typu Arcnet, gdzie przesyłany jest stale blokdanych (ang. token) pomiędzy kolejnymi uczestnikami. Użytkownik, który chce nadawaćoczekuje na przekazanie bloku. Jeśli bajty sterujące umieszczone w bloku sygnalizują, że jeston wolny, ustawia je na wartości zajęty, dopisuje identyfikator adresata danych oraz wpisujedane do transmisji i przekazuje blok dalej. Adresat po otrzymaniu informacji przestawia bitysterujące.
Obie powyższe metody są metodami o kontrolowanym dostępie do sieci. Procedurysterujące komunikacją uniemożliwiają powstanie takiej sytuacji, w której kilka stacji jedno-cześnie próbowałoby nadać informację równocześnie. Oczywiście zaletą takiego systemu jestszybkość transmisji ale istnieje konieczność stosowania krótkich bloków danych i odpowied-niej topologii.
Większość sieci lokalnych wykorzystuje topologię typu magistrala, gdzie stosowanajest metoda niekontrolowanego (losowego) dostępu do sieci. Bardzo często stosuje się, szcze-gólnie w sieciach komputerowych, metodę testowania nośnika i wspólnego dostępu do sieci zwykrywaniem kolizji CSMA/CD (Carrier Sense Multiple Access with Collision Detected).Taki sposób transmisji dopuszcza do występowania kolizji (więcej niż jeden uczestnik pró-buje nadawać) lecz chroni przed jej skutkami. Użytkownik może bowiem nadawać dopieropo stwierdzeniu, że w sieci nie jest prowadzona transmisja. Niemniej, kilku uczestników mo-że rozpocząć nadawanie równocześnie. Dlatego każdy z nich sprawdza w trakcie nadawania,czy nie nadaje ktoś inny. Jeśli zaistnieje taka sytuacja, wszyscy nadawcy przerywają transmi-sję i każdy z nich po losowo dobranym czasie ponownie rozpoczyna transmisję przez spraw-dzenie najpierw, czy łącze jest wolne. Metodę CSMA/CD stosuje m.in. sieć typu Ethernet.
Inną metodą losowego dostępu do sieci jest metoda testowania nośnika i wspólnegodostępu do sieci z unikaniem kolizji CSMA/CA (Carrier Sense Multiple Access with Colli-sion Avoidance). Metoda ta różni się od poprzedniej, że uczestnicy transmisji mają przydzie-lone priorytety i w momencie gdy proces nadawania rozpoczną dwaj uczestnicy ten z niższympriorytetem wstrzymuje się i kontynuuje po zwolnieniu sieci. Oczywiście może zdarzyć sięsytuacja, kiedy obaj uczestnicy posiadają taki sam priorytet. W takim przypadku użytkownik zniższym adresem fizycznym zwalnia magistralę dla użytkownikowi z wyższym adresem.Metoda ta jest często m.in. w magistrali instalacyjnej EIB.

16
2.3.3. Nośnik sygnału.System okablowania stanowi drogę łączącą urządzenia sieciowe. Najwcześniejsze sie-
ci używały kabla koncentrycznego (współosiowego). Obecnie jednak, sieci mogą wykorzy-stywać wiele różnych innych nośników przenoszących dane.
Rodzaj okablowania jest istotnym elementem transmisji danych. Jest z nim związanamaksymalna prędkość transmisji, podatność na zakłócenia, no i oczywiście koszt całej insta-lacji. Dlatego też istnieją różnego rodzaju nośniki transmisji danych, zaś do projektanta należywybór najlepiej odpowiadającego danej instalacji.
2.3.3.1. Kabel koncentryczny (współosiowy).Kabel koncentryczny składa się z pojedynczego, centralnego przewodu otoczonego
warstwą izolacyjną, a następnie ekranującą siateczką, lub folią oraz zewnętrzną izolacją.Dzięki swojej konstrukcji jest on odporny na zakłócenia elektromagnetyczne.
Zalety:
• mało wrażliwy na zakłócenia i szumy,
• niższy koszt niż kabel skręcany ekranowany,
• nadaje się do transmisji szerokopasmowej (modulowanej).
Wady:
• łatwy do uszkodzenia,
• trudny w wykorzystaniu.
2.3.3.2. Kabel skręcany.Wyróżnia się dwa podstawowe rodzaje kabla skręcanego: nieekranowany kabel skrę-
cany (UTP) i ekranowany kabel skręcany (STP). Kabel nieekranowany jest obecnie coraz rza-dziej stosowany, głównie ze względu na niską prędkość transmisji oraz dużą podatność nazakłócenia. Nie będzie więc omawiany w niniejszej pracy. Na uwagę zasługuje natomiastprzewód STP. Składa się on z jednej lub więcej par przewodów (żył) skręconych ze sobą,otoczonych ekranującą folią lub siatką i zazwyczaj umieszczonych we wspólnej osłonie izola-cyjnej. W zależności od zastosowań każda pojedyncza para może mieć lub nie własne ekra-nowanie.
Zalety:
• wysoka szybkość transmisji,
• łatwiejsza obsługa niż kabla koncentrycznego.
Wady:
• wyższy koszt instalacji.
2.3.3.3. Światłowód.Przewód światłowodowy składa się z jednej lub więcej żył szklanych lub z tworzywa
organicznego. Sygnał jest przesyłany w postaci impulsów światła lub fali świetlnej o odpo-wiedniej długości. Dzięki swojej zasadzie działania światłowód jest praktycznie niewrażliwyna działanie zakłóceń elektromagnetycznych, a ponadto dzięki małemu tłumieniu może prze-syłać sygnały na duże odległości.
17
Zalety:
• brak podatności na zakłócenia elektromagnetyczne,
• możliwość izolacji elektrycznej pomiędzy segmentami sieci,
• duża szybkość przesyłu,
• możliwość wykorzystania do przesyłu na duże odległości.
Wady:
• wysokie koszty,
• trudne w instalacji,
• łatwe do uszkodzenia.
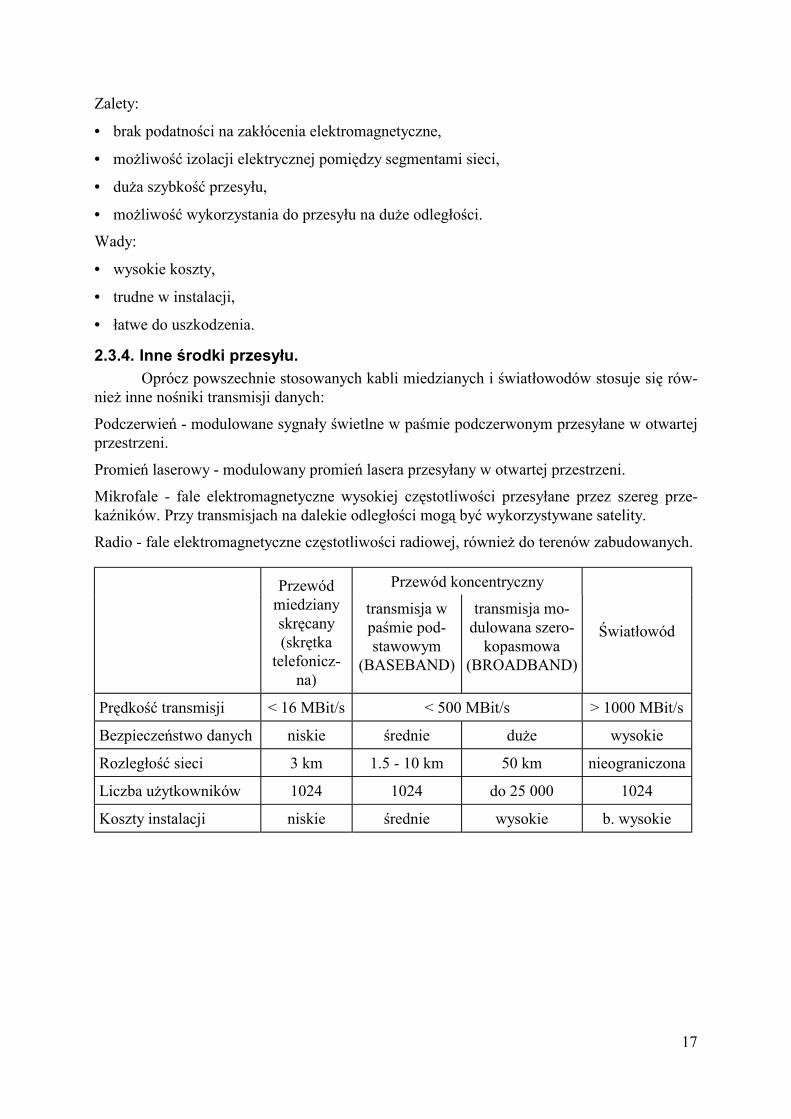
2.3.4. Inne środki przesyłu.Oprócz powszechnie stosowanych kabli miedzianych i światłowodów stosuje się rów-
nież inne nośniki transmisji danych:
Podczerwień - modulowane sygnały świetlne w paśmie podczerwonym przesyłane w otwartejprzestrzeni.
Promień laserowy - modulowany promień lasera przesyłany w otwartej przestrzeni.
Mikrofale - fale elektromagnetyczne wysokiej częstotliwości przesyłane przez szereg prze-kaźników. Przy transmisjach na dalekie odległości mogą być wykorzystywane satelity.
Radio - fale elektromagnetyczne częstotliwości radiowej, również do terenów zabudowanych.
Przewód Przewód koncentrycznymiedzianyskręcany(skrętka
telefonicz-na)
transmisja wpaśmie pod-stawowym
(BASEBAND)
transmisja mo-dulowana szero-
kopasmowa(BROADBAND)
Światłowód
Prędkość transmisji < 16 MBit/s < 500 MBit/s > 1000 MBit/s
Bezpieczeństwo danych niskie średnie duże wysokie
Rozległość sieci 3 km 1.5 - 10 km 50 km nieograniczona
Liczba użytkowników 1024 1024 do 25 000 1024
Koszty instalacji niskie średnie wysokie b. wysokie
18
3. Topologia i organizacja systemu Europejskiej MagistraliInstalacyjnej.
System instabus EIB w znacznej mierze korzysta z doświadczeń i rozwiązań stosowa-nych w sieciach komputerowych i przemysłowych sieciach automatyki. Dlatego topologia isposób komunikowania się między sobą użytkowników jest bardzo podobny.
Wszystkie urządzenia przyłączone do magistrali są równoprawne, sterowane w sposóbzdecentralizowany. Poszczególne aktory i sensory są oznaczane jako elementy magistralne.Elementy specjalne, służące do połączenia poszczególnych części systemu w jedną strukturęokreśla się mianem sprzęgieł. W zależności od miejsca ich zastosowania wyróżnia się sprzę-gła liniowe, obszarowe i wzmacniacze liniowe.
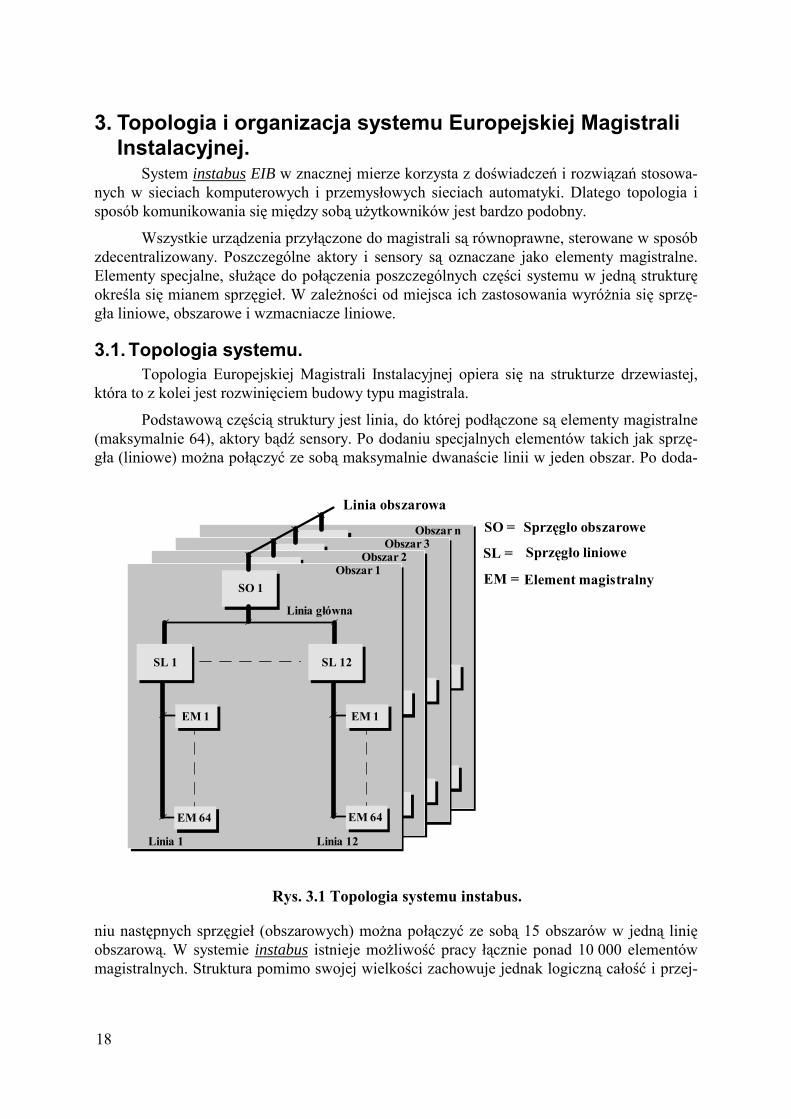
3.1. Topologia systemu.Topologia Europejskiej Magistrali Instalacyjnej opiera się na strukturze drzewiastej,
która to z kolei jest rozwinięciem budowy typu magistrala.
Podstawową częścią struktury jest linia, do której podłączone są elementy magistralne(maksymalnie 64), aktory bądź sensory. Po dodaniu specjalnych elementów takich jak sprzę-gła (liniowe) można połączyć ze sobą maksymalnie dwanaście linii w jeden obszar. Po doda-
niu następnych sprzęgieł (obszarowych) można połączyć ze sobą 15 obszarów w jedną linięobszarową. W systemie instabus istnieje możliwość pracy łącznie ponad 10 000 elementówmagistralnych. Struktura pomimo swojej wielkości zachowuje jednak logiczną całość i przej-
Sprzęgło obszaroweSO =
SO 1
EM 64EM 64
EM 1EM 1
SL 12SL 1
Linia główna
Linia 12Linia 1
Linia obszarowa
Obszar nObszar 3
Obszar 2Obszar 1
Sprzęgło liniowe
Element magistralny
SL =
EM =
Rys. 3.1 Topologia systemu instabus.
19
rzystość. Wszyscy uczestnicy wymiany informacji mogą się wspólnie komunikować niezależ-nie od miejsca w którym są podłączeni do przewodu magistralnego.
Komunikacja odbywa się zazwyczaj lokalnie, czyli w obrębie jednej linii. W takimprzypadku sensory nadają telegramy, zgodnie z zasadą losowego dostępu do magistraliCSMA/CA (patrz rozdz. Metody dostępu do sieci), które rozchodzą się po całej linii. Aktory,dla których przeznaczone są informacje odbierają je i potwierdzają nadawcy prawidłoweprzyjęcie telegramu. Inni użytkownicy, do których dany telegram nie jest przeznaczony igno-rują go. Duże znaczenie w tym momencie odgrywają sprzęgła liniowe, zapobiegające rozprze-strzenianiu się informacji po całym systemie. Pełnią one rolę filtrów-wzmacniaczy. W mo-mencie uruchamiania systemu w sprzęgle zapisywana jest tablica filtracyjna określająca, któretelegramy należy wzmocnić i przekazać dalej, a które wytłumić. Przepływ informacji, jakrównież filtracja, są możliwe oczywiście w obie strony. Gdy telegram wysłany np. przez ele-ment linii 1, przeznaczony jest dla elementu linii 12, dociera on do sprzęgła liniowego 1 izostaje przez nie przepuszczony do linii głównej. Następnie przedostaje się przez sprzęgłoliniowe 12 i dociera do odbiorcy. W tym czasie sprzęgła liniowe 2÷11 nie przepuszczają tele-gramu znajdującego się w linii głównej do swoich linii. Dzięki temu w obrębie tych linii,równolegle, może odbywać się komunikacja.
Identyczne tabele znajdują się w sprzęgach obszarowych tak, że informacja możeswobodnie docierać do elementów znajdujących się w innych częściach struktury systemu.Identyczny jest również proces przekazywania telegramu do innych obszarów.
W przypadku konieczności podłączenia do linii więcej niż 64 elementy magistralne,jako sześćdziesiąty czwarty element stosuje się wzmacniacz liniowy, który wydłuża linię onastępne 64 elementy.

20
3.2. Adresowanie.W systemie instabus istnieją dwa typy adresów: fizyczny i grupowy. Pierwszy z nich
ma za zadanie określić miejsce konkretnego elementu w strukturze systemu, drugi z nichprzyporządkowuje dany element do funkcji jakie powinien spełniać i zaszeregowuje go dogrupy urządzeń, z którymi powinien współpracować. Oba adresy pomimo podobnej notacji sąwłaściwie interpretowane przez program narzędziowy.
X/X/0
X/X/64
X/X/127
X/X/65
X/X/63
X/X/1
SOSO
Linia głównaSL
Linia obszarowa
SL
WL
EM1
EM63
EM65
EM127
EM1
EM64
SOSLWLEM
= Sprzęgło obszarowe= Spręgło liniowe= Wzmacniacz liniowy= Element magistralny
Rys. 3.2 Sposób zastosowania wzmacniacza liniowego.

21
3.2.1. Adres fizyczny.Adres fizyczny jest to niepowtarzalny numer jaki otrzymuje każdy element w syste-
mie, który określa odbiorcę telegramu. Z punktu widzenia maszyny numer jest dowolną liczbą
z zakresu od 0 do 65 534 (zarezerwowane jest miejsce na liczbę szesnastobitową), lecz w celuzachowania przejrzystości struktury adres fizyczny zapisuje się w formie uproszczonej: O.L.E(gdzie O - numer obszaru, L - numer linii, E - numer elementu). Sposób nadawania adresówfizycznych jest zobrazowany na rys. 3.3. Poszczególne parametry mogą przybierać następują-ce wartości:
O = 1÷15 - numery obszarów 1÷15,
O = 0 - numer dla elementów umieszczonych na linii obszarowej,
L = 1÷12 - numery linii 1÷12,
L= 0 - numer dla elementów umieszczonych na linii głównej,
E = 1÷64 - numery elementów 1÷64.
Jak widać istnieją elementy szczególne, posiadające w swoim adresie fizycznym liczbę0. Elementy te są urządzeniami systemowymi koniecznymi do prawidłowego funkcjonowaniasystemu i są umieszczone na poziomie linii sprzęgających (głównych i obszarowych). Do ta-kich urządzeń należą m.in. zasilacz linii głównej lub linii obszarowej.
1.0.0 15.0.0
1.1.0 1.12.0
1.1.1 1.12.1
1.12.641.1.64
KON SO 1 SO 150.0.>0
KontrolerKON =Sprzęgło obszaroweSO =
EM 64EM 64
EM 1EM 1
SL 12SL 1
Linia główna
Linia 12Linia 1
Linia obszarowa
Sprzegło linioweElement magistralny
SL =EM =
Rys. 3.3 Sposób nadawania adresów fizycznych w systemie EIB.

22
3.2.2. Adres grupowy (logiczny).Adres grupowy jest dodatkowym adresem mającym na celu określenie grup urządzeń
wspólnie współpracujących. Pod adres wysyłany jest telegram z poleceniem dla kilku urzą-dzeń np. dla wszystkich opraw w pomieszczeniu, żeby zredukowały światło o 50%.
Sposób zapisu adresu grupowego jest podobny do adresu fizycznego. Zapisuje się gow formie: G/Ś/P, gdzie G - oznacza grupę główną, Ś - grupę pośrednią, P - podgrupę. Po-szczególne parametry mogą przybierać następujące wartości:
G = 0÷15,
Ś = 0÷7,
P = 0÷255
Za pomocą tych parametrów możemy różnicować wszelkie funkcje w obiekcie. Przy-kładowy podział może być następujący:
• Numer grupy głównej (G) określa pomieszczenie lub grupę pomieszczeń np. parter,
• Numer grupy pośredniej (Ś) definiuje rodzaj funkcji np. oświetlenie,
• Numer podgrupy (P) uściśla rodzaj funkcji np. w³¹cz/wy³¹cz lampy L1 i L2 w kuchni.
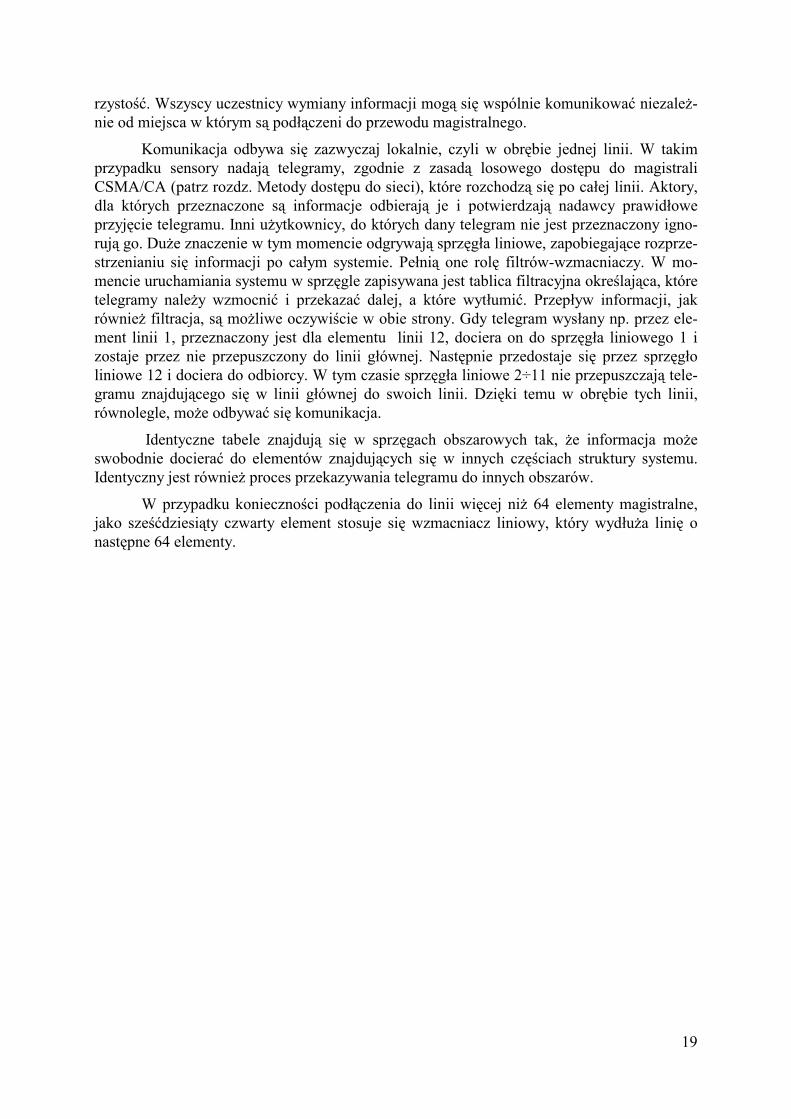
Podział ten nie jest jednak sztywny i może być swobodnie definiowany w miarę po-trzeb. Przykładowe przyporządkowanie adresów grupowych dla sterowania oświetleniem ob-jaśnione jest na rys. 3.5.
Pierwsza liczba, czyli grupa główna w tym przypadku jest niepotrzebna, gdyż pokojezawierają niewiele elementów i można je rozpatrywać razem. Potrzeba korzystania z grupygłównej wynika dopiero przy większych obiektach. Druga liczba określa rodzaj urządzeń, wtym przypadku 1 zarezerwowane jest dla oświetlenia. Ostatnim elementem adresu jest numer
2/1/7EM 2
1/5/3EM 3
1/3/11EM 4
2/3/10EM 64
Element magistralny
SO
1/1/10
Sprzęgło obszaroweSO =
EM 1
SL 1
15/3/11EM 64
15/1/10EM 1
SL 12
Linia główna
Linia 12Linia 1
Sprzęgło linioweSL =EM =
Rys. 3.4 Sposób określania adresów grupowych.
23
podgrupy definiujący konkretną funkcję sterowania. I tak liczba 1 określa funkcjew³¹cz/wy³¹cz opraw w pokoju 1. Grupę tworzą oprawy L11, L12 i L13 oraz przycisk P1.Oznacza to, że oprawy te są załączane i wyłączane grupowo za pomocą przycisku P1.
Liczba 2 definiuje grupę sterowania funkcją oświetlenia w³¹cz/wy³¹cz dla pokoju dru-giego identycznie. Grupa zbudowana jest identycznie jak poprzednia. Następną grupą jestgrupa 11. Określa ona sterowanie dla opraw umieszczonych przy oknie (L11 i L21) za pomo-cą czujnika natężenia światła słonecznego. Oprawy te są przygaszane w momencie dużegonasłonecznienia i rozjaśniane w przypadku zachmurzenia.
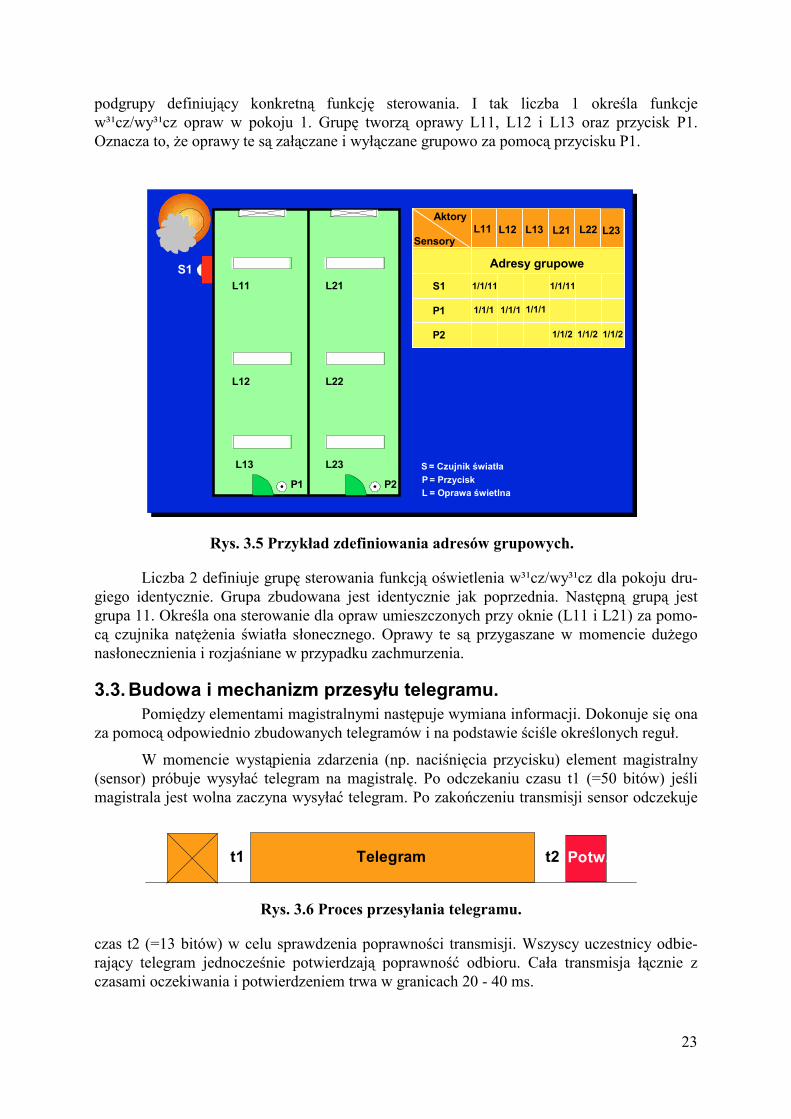
3.3. Budowa i mechanizm przesyłu telegramu.Pomiędzy elementami magistralnymi następuje wymiana informacji. Dokonuje się ona
za pomocą odpowiednio zbudowanych telegramów i na podstawie ściśle określonych reguł.
W momencie wystąpienia zdarzenia (np. naciśnięcia przycisku) element magistralny(sensor) próbuje wysyłać telegram na magistralę. Po odczekaniu czasu t1 (=50 bitów) jeślimagistrala jest wolna zaczyna wysyłać telegram. Po zakończeniu transmisji sensor odczekuje
czas t2 (=13 bitów) w celu sprawdzenia poprawności transmisji. Wszyscy uczestnicy odbie-rający telegram jednocześnie potwierdzają poprawność odbioru. Cała transmisja łącznie zczasami oczekiwania i potwierdzeniem trwa w granicach 20 - 40 ms.
L11
L12
L13
L21
L22
L23
P1 P2
S1
L23
Adresy grupowe
1/1/11 1/1/11
1/1/1 1/1/1 1/1/1
1/1/2 1/1/2 1/1/2
P1
P2
S1
L11 L12 L13 L21 L22Aktory
Sensory
LP = Przycisk
= Oprawa świetlna
S = Czujnik światła
Rys. 3.5 Przykład zdefiniowania adresów grupowych.
t1 t2Telegram Potw.
Rys. 3.6 Proces przesyłania telegramu.

24
Telegramy składają się, zgodnie z informacjami zawartymi w rozdziale: „Podstawytransmisji danych”, z trzech podstawowych części nagłówka, rdzenia, oraz części kontrolnej.
Nagłówek tworzy: część sterująca, adres nadawcy, adres odbiorcy, licznik kontroli przejściaoraz część informująca o długość informacji użytecznej. W systemie EIB zastosowano tele-gramy długie, o zmiennej długości. W sumie maksymalna długość telegramu może wynosić184 bity. W związku z zapewnieniem synchronizacji zegarów nadajnika i odbiornika podczastransmisji szeregowej asynchronicznej jest on dzielony na pakiety (ramki) po osiem bitów(jeden bajt). Każdy pakiet, oprócz bitów danych, wyposażany jest w bit startu, część kontrol-ną, którą jest bit parzystości oraz bit stopu. Razem z danymi długość jednej ramki wynosijedenaście bitów. Bit parzystości pełni funkcję kontrolną i podaje parzystość bitów danych„wprost”.
Telegram, w zależności od długości informacji może on wynosić od ośmiu aż do dwu-dziestu trzech pakietów. Razem z bitami sterującymi i kontrolnymi zawiera maksymalnie 253bity.
3.3.1. Pole sterujące.Określa priorytet przesyłanego telegramu. Może on przybierać cztery wartości. Prio-
rytet najwyższy posiadają telegramy funkcji systemowych, później funkcji alarmowych, a na-stępnie funkcje sterowania ręcznego. Najniższy priorytet posiadają telegramy funkcji sterowa-nia automatycznego.
Rys. 3.7 Struktura telegramu oraz podział telegramu na 8-mio bitowe pakiety infor-macyjne.
Pakiet Pakiet
ST STD0 D1 D2 D3 D4 D5 D6 D7 P SP
Rys. 3.8 Struktura pakietu.

25
Ponadto w polu sterującym zawarty jest również bit powtórzeń, który określa czyuczestnik, który wykonał już dany rozkaz ma reagować na ten sam rozkaz w bieżącym tele-gramie.
3.3.2. Adres nadawcy.Pole to zawiera fizyczny adres sensora nadającego telegram. Jest ono potrzebne dla
aktora przyjmującego polecenie, w celu wysłania potwierdzenia odebrania polecenia. Ponadtowykorzystuje się je w momencie analizowania transmisji magistralnej do określenia nadawcytelegramu.
3.3.3. Adres docelowy.Adres odbiorcy wyznacza miejsce dostarczenia informacji. Różni się on od adresu
nadawcy tym, że posiada o jeden bit więcej. Bit ten określa czy adres docelowy jest adresemfizycznym (wartość 0), czy też adresem grupowym (wartość 1). Rozróżnienie takie jest ko-
nieczne, ponieważ gdy adresem docelowym jest adres fizyczny odbiorcą jest jeden konkretnyaktor, w przeciwnym razie odbiorcą jest grupa aktorów posiadająca wspólny adres grupowy.
Adres grupowy składa się z 15 bitów, a więc o jeden bit mniej niż adres fizyczny. Ztego powodu w adresie logicznym na najbardziej znaczącym miejscu ustawiony jest bit zero.
3.3.4. Blok kontrolny.Zawiera bajt kontroli parzystości pionowej (wzdłuż), określany metodą parzystości
„nie wprost”. Wraz z bitami parzystości każdej ramki służy do sprawdzenia poprawnościprzesyłu danych metodą krzyżową.
Rys. 3.9 Budowa adresu fizycznego
Rys. 3.10 Struktura adresu grupowego.

26
4. Techniczna realizacja systemu instabus.System instabus jest systemem o tzw. „rozproszonej inteligencji”. Oznacza to, że
wszystkie elementy są w pewnym zakresie „inteligentne” i wspólnie tworzą automatykę ozdecentralizowanym sposobie sterowania. Specyficzne rozwiązanie determinuje odpowiedniąbudowę połączeń i elementów.
4.1. Technologia transmisji danych.W systemie magistralnym EIB przesyłanie danych odbywa się za pomocą przewodu
magistralnego tj. miedzianego przewodu dwuparowego, ekranowanego UTP, tzw. „skrętkiekranowanej”. W rzeczywistości wykorzystuje się jedynie dwie żyły (czerwoną i czarną). Po-zostałe dwie są traktowane jako rezerwowe. Uzyskuje się w ten sposób wysoką ochronę przedzewnętrznymi zakłóceniami elektromagnetycznymi, przy zachowaniu niskiego kosztu oka-blowania i prostej instalacji.
Przewód magistralny wraz z dołączonymi do niego elementami magistralnymi zasilanyjest napięciem znamionowym 24 V DC typu SELV (Safety Extra Low Voltage). Sieć o na-pięciu tego typu charakteryzuje się:
• niską wartością napięcia ≤ 50 V AC, ≤ 120 V DC,
• zasilaniem z transformatora bezpieczeństwa,
• podwójną izolacją od innych sieci,
• brakiem uziemienia przewodów.
Zasilanie tego typu umożliwia transmisję symetryczną sygnałów, co oznacza dodat-kową odporność na zakłócenia elektromagnetyczne. W przypadku wystąpienia przepięć, róż-nica potencjałów obu przewodów, czyli napięcie pomiędzy nimi, pozostaje takie samo cho-ciaż sama wartość potencjału rośnie.
Przesyłanie telegramów odbywa się na zasadzie kodowania binarnego. Stany logiczneokreślane są na podstawie przepływu prądu (logiczne 0), bądź braku przepływu (logiczne 1).
EM21 V DC>=21 V DC>=
EM
Cewka
230 V50/60 Hz
EM = Element magistralny
28 V DC320 mA
100 ms czaspodtrzymania
Rys. 4.1 Sposób zasilania elementów magistralnych.

27
Każda linia systemu instabus EIB zasilana jest za pomocą zasilacza napięcia stałego onapięciu wyjściowym 28 V DC i prądzie 320 lub 640 mA. Zapewnia on również 100 ms czasbuforowania napięcia. Jest to w zupełności wystarczające dla urządzeń magistralnych, którepracują przy napięciu minimalnym 21 V i pobierają moc rzędu 150 - 200 mW. W przypadkuwiększego poboru mocy możliwa jest równoległa praca zasilaczy. Zdarzają się również sytu-acje, gdy przewód jednej linii jest na tyle długi, że występuje konieczność zastosowaniadwóch zasilaczy dla jednej linii. Wymagana jest wtedy minimalna odległość pomiędzy dwo-ma zasilaczami 200 m.
Ponieważ transmisja danych odbywa się za pomocą tych samych przewodów zasilają-cych elementy magistralne, przesyłana informacja nakłada się na to napięcie. Podstawowymzagadnieniem technicznym jest więc oddzielenie od siebie dwóch napięć, stałego -zasilającego od zmiennego, będącego zakodowaną informacją.
Budowa modułu komunikacyjnego bazująca na właściwościach indukcyjności i po-jemności umożliwia odseparowanie jednego napięcia od drugiego. Ideę budowy tego modułu,zawartego w porcie magistralnym, przedstawia rys. 4.2. Moduł komunikacyjny składa się ztransformatora i szeregowo włączonego kondensatora do uzwojenia strony pierwotnej. Reak-tancja indukcyjna transformatora dla zasilacza (napięcie stałe) jest równa zero
XL= 2πf ; f = 0 Hz,
zaś reaktancja pojemnościowa kondensatora nieskończenie duża. Kondensator traktowany jestjak przerwa.
XC = 1/(2πf ); f = 0 Hz
Stałe napięcie zasilające odkłada się więc w pełni na kondensatorze.
Port magistralny
MKKPMMZ
= Moduł komunikacyjny= Kontroler portu magistralnego= Moduł zasilający
INFO
MK KPM
elektroniczneŁącze
adaptacyjne
Magistrala
MZUkłady
Rys. 4.2 Budowa modułu komunikacyjnego.
28
Informacja zakodowana pod postacią napięcia zmiennego traktuje pojemność konden-satora jako małą reaktancję i zamyka obwód uzwojenia pierwotnego transformatora, powo-dując indukowanie się napięcia po stronie wtórnej. Transformator pełni rolę filtru oddzielają-cego napięcie zmienne od stałego, czyli informację od zasilania. Telegram odebrany przezmoduł komunikacyjny i dostępny po stronie wtórnej jako napięcie zmienne odczytywany jestprzez kontroler. Analogicznie jest w przypadku wysyłania telegramów. Informacja zamienianajest na sygnał zmiennonapięciowy i po przejściu na stronę pierwotną transformatora nakładasię na napięcie stałe.
Wykorzystana jest również własność cewki tj. mała impedancja przy napięciu stałym iduża impedancja przy napięciu przemiennym. Stosuje się ją do zabezpieczenia zasilacza, któ-ry ma standardowo montowaną cewkę, separującą zasilacz od telegramów.
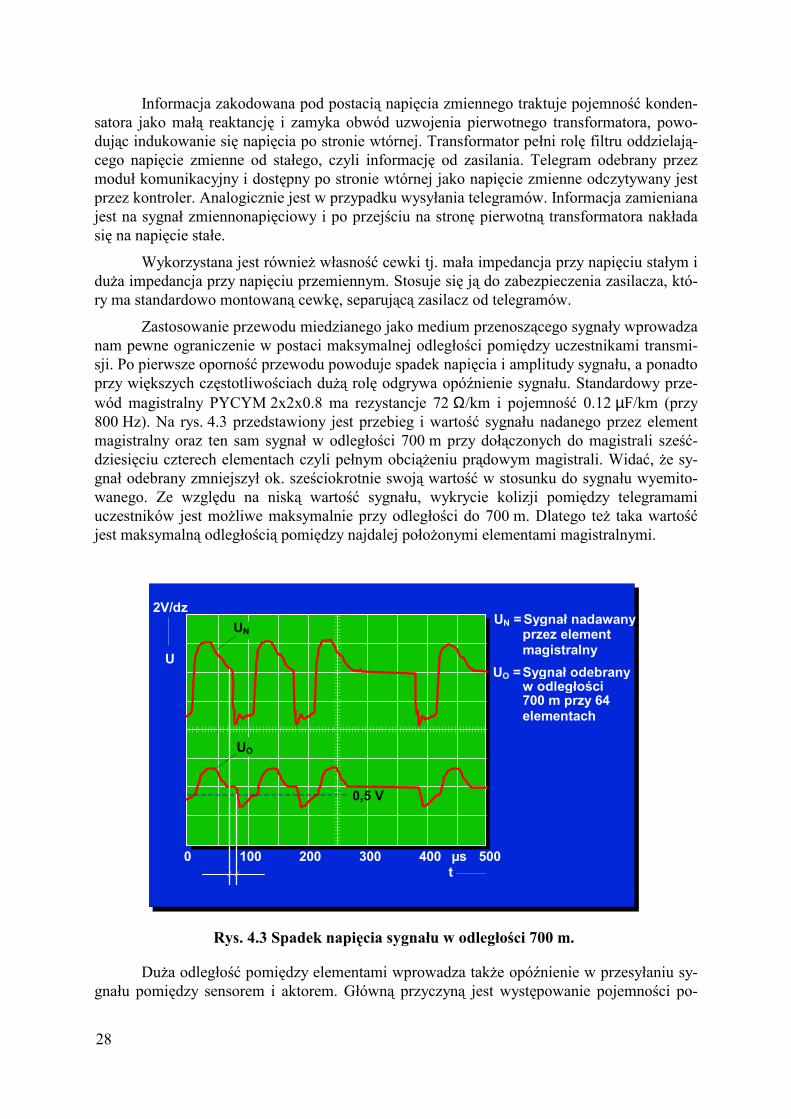
Zastosowanie przewodu miedzianego jako medium przenoszącego sygnały wprowadzanam pewne ograniczenie w postaci maksymalnej odległości pomiędzy uczestnikami transmi-sji. Po pierwsze oporność przewodu powoduje spadek napięcia i amplitudy sygnału, a ponadtoprzy większych częstotliwościach dużą rolę odgrywa opóźnienie sygnału. Standardowy prze-wód magistralny PYCYM 2x2x0.8 ma rezystancje 72 Ω/km i pojemność 0.12 µF/km (przy800 Hz). Na rys. 4.3 przedstawiony jest przebieg i wartość sygnału nadanego przez elementmagistralny oraz ten sam sygnał w odległości 700 m przy dołączonych do magistrali sześć-dziesięciu czterech elementach czyli pełnym obciążeniu prądowym magistrali. Widać, że sy-gnał odebrany zmniejszył ok. sześciokrotnie swoją wartość w stosunku do sygnału wyemito-wanego. Ze względu na niską wartość sygnału, wykrycie kolizji pomiędzy telegramamiuczestników jest możliwe maksymalnie przy odległości do 700 m. Dlatego też taka wartośćjest maksymalną odległością pomiędzy najdalej położonymi elementami magistralnymi.
Duża odległość pomiędzy elementami wprowadza także opóźnienie w przesyłaniu sy-gnału pomiędzy sensorem i aktorem. Główną przyczyną jest występowanie pojemności po-
U
0,5 V
UO
1000 200 300 400 500t
UN =
UO =
Sygnał nadawanyprzez elementmagistralny
Sygnał odebranyw odległości700 m przy 64elementach
µs
2V/dz
U
UN
Rys. 4.3 Spadek napięcia sygnału w odległości 700 m.
29
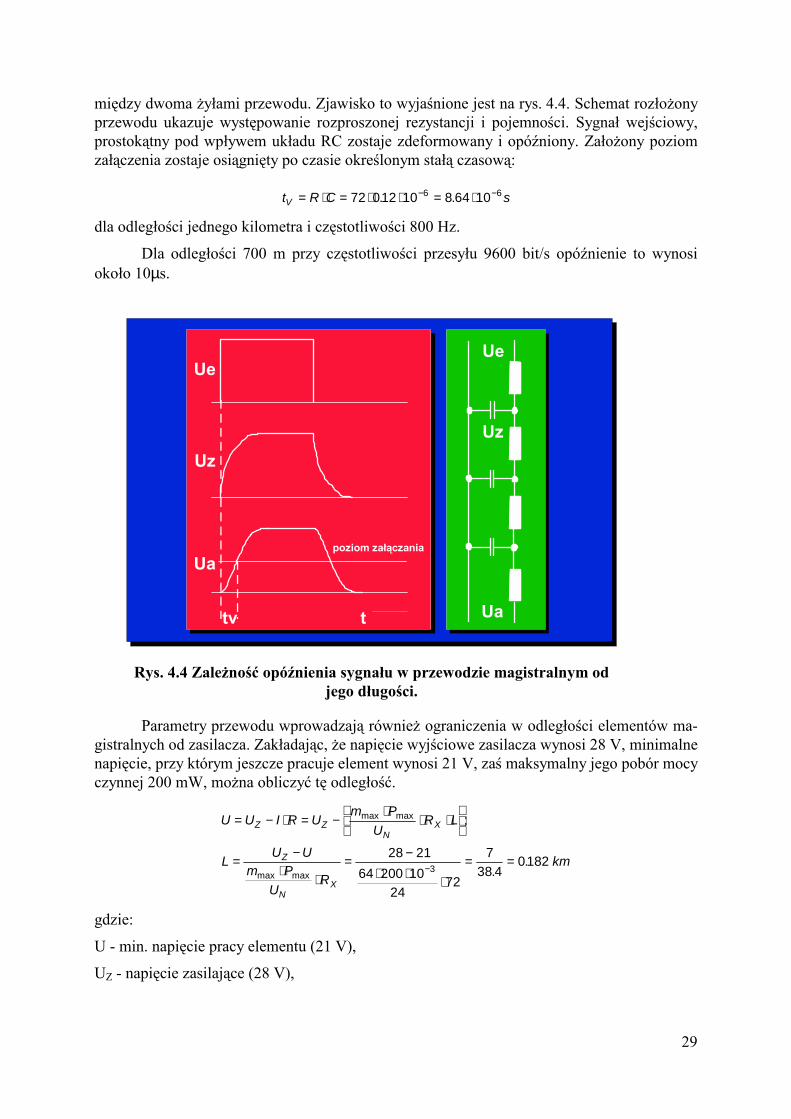
między dwoma żyłami przewodu. Zjawisko to wyjaśnione jest na rys. 4.4. Schemat rozłożonyprzewodu ukazuje występowanie rozproszonej rezystancji i pojemności. Sygnał wejściowy,prostokątny pod wpływem układu RC zostaje zdeformowany i opóźniony. Założony poziomzałączenia zostaje osiągnięty po czasie określonym stałą czasową:
t R C sV = ⋅ = ⋅ ⋅ = ⋅− −72 012 10 8 64 106 6. .
dla odległości jednego kilometra i częstotliwości 800 Hz.
Dla odległości 700 m przy częstotliwości przesyłu 9600 bit/s opóźnienie to wynosiokoło 10µs.
Parametry przewodu wprowadzają również ograniczenia w odległości elementów ma-gistralnych od zasilacza. Zakładając, że napięcie wyjściowe zasilacza wynosi 28 V, minimalnenapięcie, przy którym jeszcze pracuje element wynosi 21 V, zaś maksymalny jego pobór mocyczynnej 200 mW, można obliczyć tę odległość.
U U I R Um P
UR L
LU U
m PU
Rkm
Z ZN
X
Z
NX
= − ⋅ = −⋅
⋅ ⋅
=−
⋅⋅
= −⋅ ⋅ ⋅
= =−
max max
max max
;
..
28 21
64 200 1024
72
738 4
01823
gdzie:
U - min. napięcie pracy elementu (21 V),
UZ - napięcie zasilające (28 V),
Ue
Uz
Ua
t
poziom załączania
tv
Ue
Ua
Uz
Rys. 4.4 Zależność opóźnienia sygnału w przewodzie magistralnym odjego długości.
30
UN - napięcie znamionowe (24 V),
mmax - maksymalna ilość elementów podłączonych do jednego zasilacza (64),
Pmax - maksymalna moc pobierana przez jeden element (200 mW),
RX - rezystywność przewodu (72 Ω/km),
L - maksymalna odległość elementu od zasilacza.
Z obliczeń wynika, że maksymalna odległość ostatniego elementu magistralnego odzasilacza wynosi nie więcej niż 182 m, pod warunkiem, że wszystkie pozostałe elementy sąumieszczone pomiędzy zasilaczem a elementem końcowym. Umieszczając zasilacz pośrodkulinii (rozdzielenie ilości elementów na dwa obwody) uzyskuje się rozpływ prądu i przez tozmniejszenie spadku napięcia, a co za tym idzie dwukrotne przedłużenie maksymalnej odle-głości.
Dodatkowo aktor nadający telegram wytwarza sygnały binarne, które można zakwali-fikować jako półfalę napięcia zmiennego. Na rys. 4.5 widać przebiegi napięcia w żyle dodat-niej. Aktor wytwarza ujemną półfalę napięcia, zaś transformator elementu nadającego wraz zcewką zasilacza wspólnie jako elementy bierne obwodu wytwarzają dodatnią półfalę wyrów-nawczą. Maksymalna odległość cewki zasilacza od transformatora, tak aby elementy współ-działały ze sobą, wynosi 350 m. W praktyce więc zaleca się umieszczanie zasilacza po środkulinii, tzn. tak aby przewody magistralne rozchodziły się od niego promieniście. Elementy ma-gistralne oddalone są wtedy od zasilacza maksymalnie o 350 m, zaś odległość pomiędzy naj-dalszymi elementami wynosi nie więcej niż 700 m. Odległości te mierzone są długością prze-wodów.

31
4.2. Budowa elementów magistralnych.Tak jak już wspomniano, system jest systemem zdecentralizowanym, czyli nie ma wy-
dzielonego sterownika, który zarządza całą instalacją. Wszystkie urządzenia, z kilkoma wy-jątkami, posiadają porty magistralne tj. układy umożliwiające wymianę informacji za pomocąmagistrali. Urządzenia te dzielą się na podstawowe, systemowe i użytkowe. Do pierwszejgrupy zaliczają się takie elementy jak zasilacze, cewki, łączniki oraz przewody. Nie posiadająone portów magistralnych, ponieważ pełnią rolę elementów zapewniających zasilanie orazłączących elektrycznie wszystkie elementy.
UN
praktycznie
teoretycznie
UN = Sygnał nadawany przez element magistralny
+5 V
-5 V
= 9600 bit/sek104µµµµs
taktywny
bierny
Rys. 4.5 Proces tworzenia sygnału w przewodzie magistralnym.

32
Pozostałe dwie grupy, chociaż pełnią w instalacji różne zadania, mają bardzo podobnąbudowę. Urządzenia te można nazwać elementami magistralnymi, czyli urządzeniami, którepodłączone do magistrali mogą bezpośrednio realizować komunikację (tworzyć telegramy,wysyłać ew. odbierać je i realizować zakodowane polecenia). Każdy element magistralnyskłada się zasadniczo z portu magistralnego i jednego specyficznego ze względu na pełnionąfunkcję elementu końcowego, który wymienia informację z portem magistralnym poprzez 10-cio pinowe złącze adaptacyjne. Port jest urządzeniem uniwersalnym, które odbiera telegramy
z magistrali, dekoduje je i steruje elementem końcowym, a w odwrotnym kierunku otrzymujeod niego informacje, koduje ją i wysyła w postaci telegramu. Zawiera w sobie moduł komuni-kacyjny zapewniający oddzielenie napięcia zasilającego od informacji oraz moduł kontrolnyzarządzający przesyłaniem i odbieraniem telegramów, a także sterowaniem elementem koń-cowym.
Do podstawowych zadań modułu komunikacyjnego jest: oddzielenie zakodowanej in-formacji od stałego napięcia zasilającego oraz dostarczanie i stabilizację napięć 24 i 5 V po-trzebnych do zasilania układu kontrolnego i elementu końcowego. Ponadto moduł ma za za-danie: ochronę przed zmianą polaryzacji i wzrostem temperatury, zabezpieczenie danychprzez zapisanie ich przy spadku napięcia zasilającego poniżej 18 V oraz reset procesora przyspadku napięcia zasilającego poniżej 4.5 V. Zawiera w sobie również komponenty odpowia-dające za przekształcenie napięcia przemiennego w informację oraz sprawdzenie poprawnościprzesyłanych telegramów.
Rolę serca elementu magistralnego pełni układ kontrolny, którego podstawową częściąjest mikroprocesor. Ma on do swojej dyspozycji trzy rodzaje pamięci:
• ROM - pamięć tylko do odczytu. Zapisane są w niej informacje producenta dotyczące spe-cyficznych własności portu,
• EEPROM - pamięć elektrycznie zapisywalna i kasowalna przeznaczona do zapisania pa-rametrów i funkcji określonych na etapie projektowania,
Rys. 4.6 Budowa elementu magistralnego

33
• RAM - pamięć dynamiczna przeznaczona do zapisywania pośrednich wyników obliczeńprocesora.
Połączenie pomiędzy portem magistralny a elementem końcowym odbywa się za po-mocą standardowego złącza 10-cio pinowego, zwanego łączem adaptacyjnym. Złącze to po-siada styki zasilające element końcowy, napięciami +5 V i +24 V oraz styki danych, realizują-ce, w zależności od typu elementu końcowego, komunikację pomiędzy portem magistralnyma elementem końcowym. Poprzez styk nr 6 złącza, port rozpoznaje rodzaj podłączonego do
niego elementu końcowego. Typ elementu definiuje sposób wykorzystania styków danych.Identyfikacji dokonuje się dzięki rezystorowi o odpowiedniej wartości umieszczonemu welemencie końcowym. Powoduje on ustawienie odpowiedniej wartości napięcia na pinie nr 6w zakresie od 0 do 5 V. Wartości napięć i typy elementów końcowych przedstawione są wtabeli.
Typ Napięcie[V]
Funkcja
0 0.00 bez dołączonego elementu końcowego1 0.252 0.50 4 wej. binarne (analogowe), 1 wyj. binarne3 0.754 1.00 2 wej. binarne (analogowe), 2+1 wyj. binarne5 1.256 1.50 3 wej. binarne (analogowe), 1+1 wyj. binarne7 1.75
Rys. 4.7 Schemat elektryczny łącza adaptacyjnego.

34
8 2.009 2.2510 2.5011 2.7512 3.00 transmisja szeregowa synchroniczna13 3.2514 3.50 transmisja szeregowa synchroniczna o stałej długości15 3.7516 4.00 transmisja szeregowa asynchroniczna17 4.2518 4.5019 4.75 4+1 wyj. binarne20 5.00 download
Jak widać przewidziano dziewiętnaście różnych typów elementów końcowych. Jak dotej pory wykorzystuje się tylko siedem, które w zupełności wystarczają do realizacji wielufunkcji.
Konkretny typ jest wykorzystywany przy realizacji różnych urządzeń. Przykładem mo-że być typ 2, gdzie w pierwszym przypadku można pobierać sygnały analogowe napięciowe,zaś w drugim wykorzystuje się ten typ do realizacji poczwórnego przycisku (łącznika). Obarozwiązania przedstawiają rys. 4.8 i rys. 4.9.
Rys. 4.8 Element końcowy typ 2,przykład zastosowania.
Rys. 4.9 Element końcowy typ 2,drugi przykład zastosowania.

35
Podobnie sytuacja przedstawia się w przypadku innych typów. Przykłady pojedyn-czych zastosowań przedstawione są na rysunkach nr 10, 11 i 12. Cechą charakterystyczną ty-pów 2, 4 i 19 jest jeden pin przeznaczony dla diody świetlnej. Wykorzystuje się ją zazwyczajprzy programowaniu i uruchamianiu urządzenia.
Elementy końcowe takie jak przyciski wykorzystujące wejścia binarne nie muszą pra-cować jak klasyczne przyciski elektryczne. Czas załączania i przerwa pomiędzy załączeniamisą informacją, która może być wykorzystana przez port magistralny. Tak jest w przypadkuprzycisku do sterowania oświetleniem. Naciśnięcie przycisku przez czas dłuższy niż t1 (mi-nimalny czas załączenia przycisku), a krótszy niż t2 powoduje wyemitowanie telegramu zpoleceniem włącz/wyłącz (w zależności od zwartego styku). Telegram zostaje wysłany poprzerwaniu załączania przycisku. Przyciskanie powyżej czasu t2 powoduje wysłanie telegra-mu ściemniaj/rozjaśniaj (w zależności od zwartego styku). Proces ściemniania lub rozjaśnia-nia trwa do momentu przerwania naciskania przycisku. W tym momencie zostaje wysłanytelegram o wstrzymaniu ściemniania/rozjaśniania. Sposób ten pozwala na nie blokowaniemagistrali pomiędzy telegramem startu i telegramem stopu procesu. Sterowanie oświetleniemmoże być przeprowadzone również za pomocą cyklicznego wysyłania telegramów. Procesróżni się od poprzedniego tym, że po okresie t2 zostają cyklicznie wysyłane co 500 ms tele-gramy z poleceniem ściemniania lub rozjaśnienie o max. 12.5 %. Proces nadawania telegra-mów kończy się w momencie przerwania naciskania przycisku.
Na większą uwagę zasługują elementy końcowe typu 12, 14, 16, ze względu na bar-dziej skomplikowaną budowę. Wszystkie one współpracują z portem magistralnym na zasa-dzie transmisji szeregowej za pomocą układu sprzęgającego szeregowego.
Rys. 4.10 Element końcowy typ 4,przykład zastosowania.
36
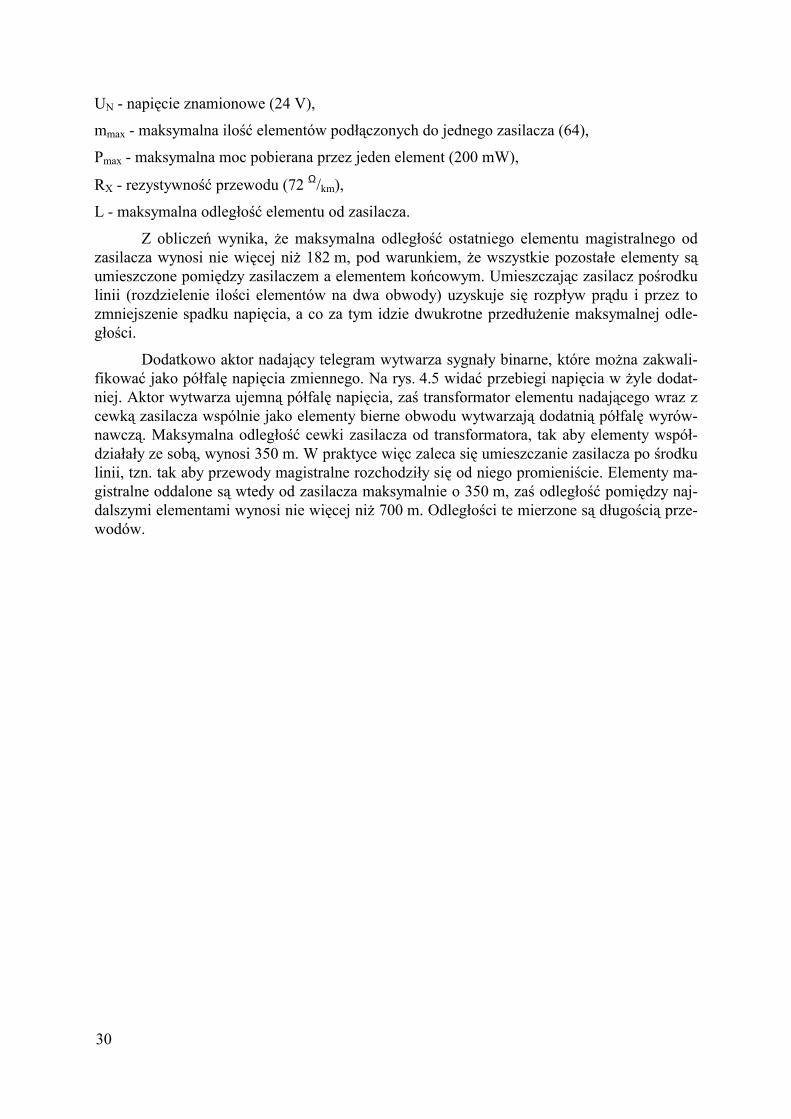
Elementy typu 12 i 14 pracują jako układy transmisji szeregowej synchronicznej, nazasadach części protokółu RS232C. Linie danych łącza adaptacyjnego podzielone są liniezegara, R x D (Received Data) danych nadawanych, T x D (Transmitted Data) danych odbie-ranych, RTS (Request To Send) zgłoszenia nadawania oraz CTS (Clear To Send) zgłoszeniagotowości do nadawania.
W momencie konieczności przesłania informacji pojawia się sygnał na linii RTS. Od-biornik potwierdza swoją gotowość do odbioru poprzez nadanie sygnału na linii CTS. Nadaj-nik rozpoczyna wtedy przesył bitów taktowany zegarem, które umieszczane są w rejestrzeprzesuwnym SR, a następnie odpowiednio wykorzystywane przez element końcowy. Odczytrejestru odbywa się na podobnej zasadzie.
Przykładem zastosowania elementu tego typu jest aktor załączająco-ściemniającywspółpracujący z układem EVG-dynamic. Układ EVG-dynamic steruje natężeniem światłaświetlówek, w zależności od wartości napięcia stałego 0-10 V na wejściu układu. Informacjaodbierana przez aktor załączająco-ściemniający od mikroprocesora umieszczana jest w reje-strze przesuwnym, a następnie zamieniana przez przekształtnik cyfrowo-analogowy na napię-cie 0-10 V.
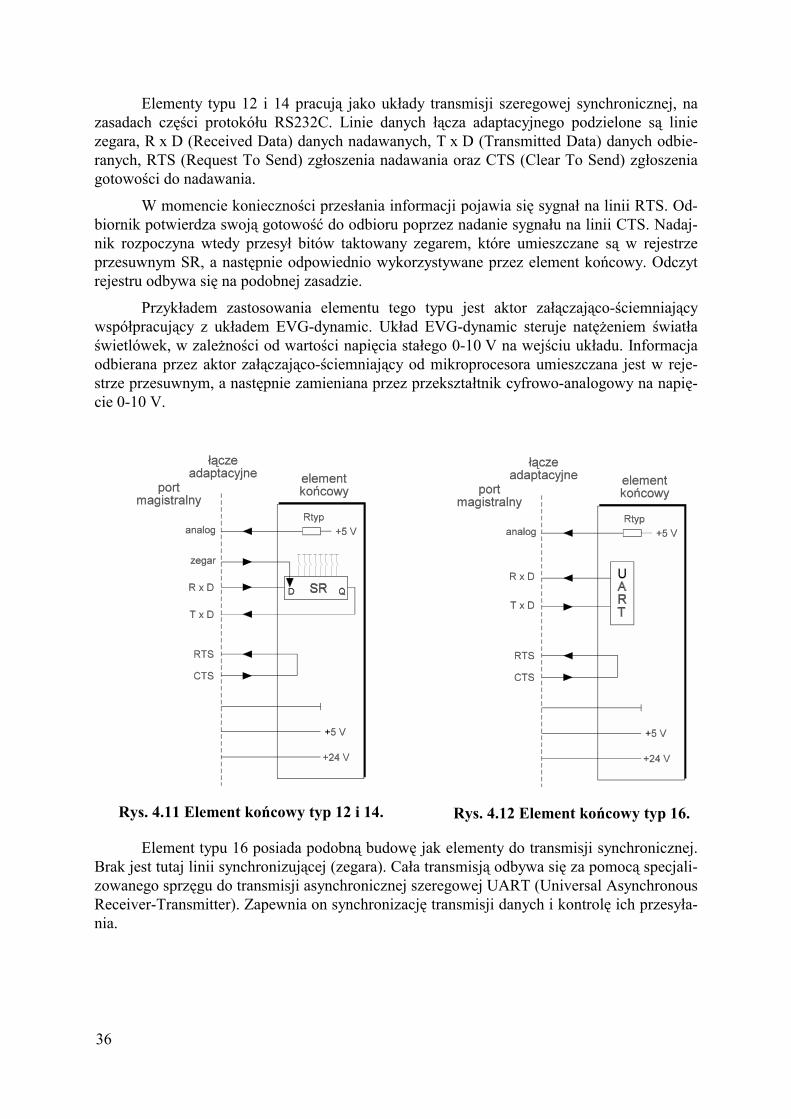
Element typu 16 posiada podobną budowę jak elementy do transmisji synchronicznej.Brak jest tutaj linii synchronizującej (zegara). Cała transmisją odbywa się za pomocą specjali-zowanego sprzęgu do transmisji asynchronicznej szeregowej UART (Universal AsynchronousReceiver-Transmitter). Zapewnia on synchronizację transmisji danych i kontrolę ich przesyła-nia.
Rys. 4.11 Element końcowy typ 12 i 14. Rys. 4.12 Element końcowy typ 16.

37
5. Opis przykładowych urządzeń wykorzystywanych w in-stalacjach.
5.1. Przycisk UP 241.Przyciski wykonane w systemie insta-
bus EIB są dopasowane wyglądem zewnętrz-nym do łączników klasycznych. Współpracująone z podtynkowym portem magistralnym (np.UP 110), poprzez 10-cio pinowe złącze. Przy-cisk UP 241 wykonany jest jako dwie nieza-leżne od siebie powierzchnie monostabilne(jednocześnie mogą być obsługiwane obaklawisze). Odpowiednia parametryzacja po-woduje, że przyciski mogą symulować pracęzwykłego łącznika pojedynczego lub bardziejzłożone zadania (np. górny klawisz możezmieniać stan jednej oprawy, zaś drugi podno-sić i opuszczać roletę w oknie). Identyczniewykonany jest przycisk UP 242, który posiadadodatkowo oznaczenia I/O.
5.2. Przycisk UP 243.Przycisk UP 243 jest wykonany jako
odpowiednik łącznika podwójnego. Posiadacztery niezależne klawisze monostabilne, któremożna dowolne przyporządkować za pomocąprogramu narzędziowego. Przycisk UP 244posiada dodatkowo oznaczenie I/O. Tak jakprzyciski UP 241 współpracują z podtynkowymportem magistralnym (np. UP 110).
5.3. Przycisk UP 245.Przycisk ten jest nowością w stosunku
do łączników klasycznych, wśród których niespotyka się poczwórnych. Składa się on zośmiu niezależnych klawiszy, które w zależ-ności od parametryzacji mogą ze sobą współ-pracować lub nie. Przycisk jest jedynie ele-mentem końcowym i musi współpracować zpodtynkowym portem magistralnym. PrzyciskUP 246 posiada dodatkowo oznaczenie I/O.
Rys. 5.13 Przyciski UP 241 i 242.
Rys. 5.14 Przyciski UP 243 i 244.
Rys. 5.15 Przyciski UP 245 i 246.
38
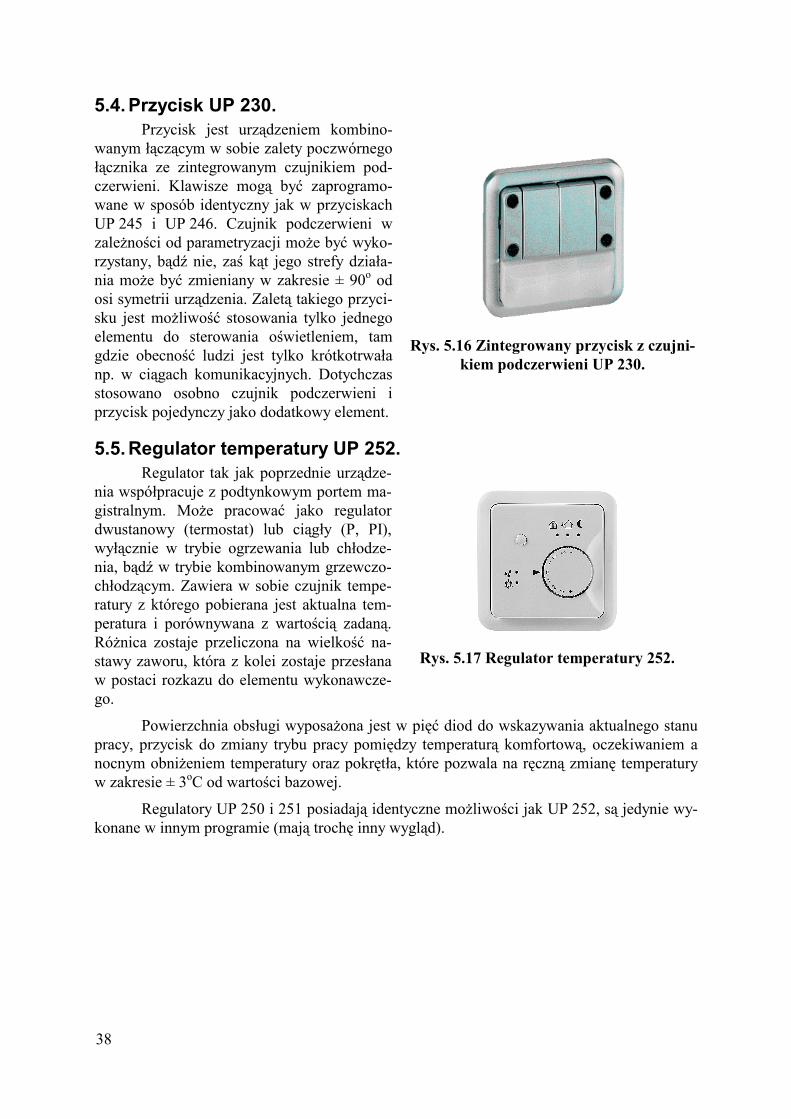
5.4. Przycisk UP 230.Przycisk jest urządzeniem kombino-
wanym łączącym w sobie zalety poczwórnegołącznika ze zintegrowanym czujnikiem pod-czerwieni. Klawisze mogą być zaprogramo-wane w sposób identyczny jak w przyciskachUP 245 i UP 246. Czujnik podczerwieni wzależności od parametryzacji może być wyko-rzystany, bądź nie, zaś kąt jego strefy działa-nia może być zmieniany w zakresie ± 90o odosi symetrii urządzenia. Zaletą takiego przyci-sku jest możliwość stosowania tylko jednegoelementu do sterowania oświetleniem, tamgdzie obecność ludzi jest tylko krótkotrwałanp. w ciągach komunikacyjnych. Dotychczasstosowano osobno czujnik podczerwieni iprzycisk pojedynczy jako dodatkowy element.
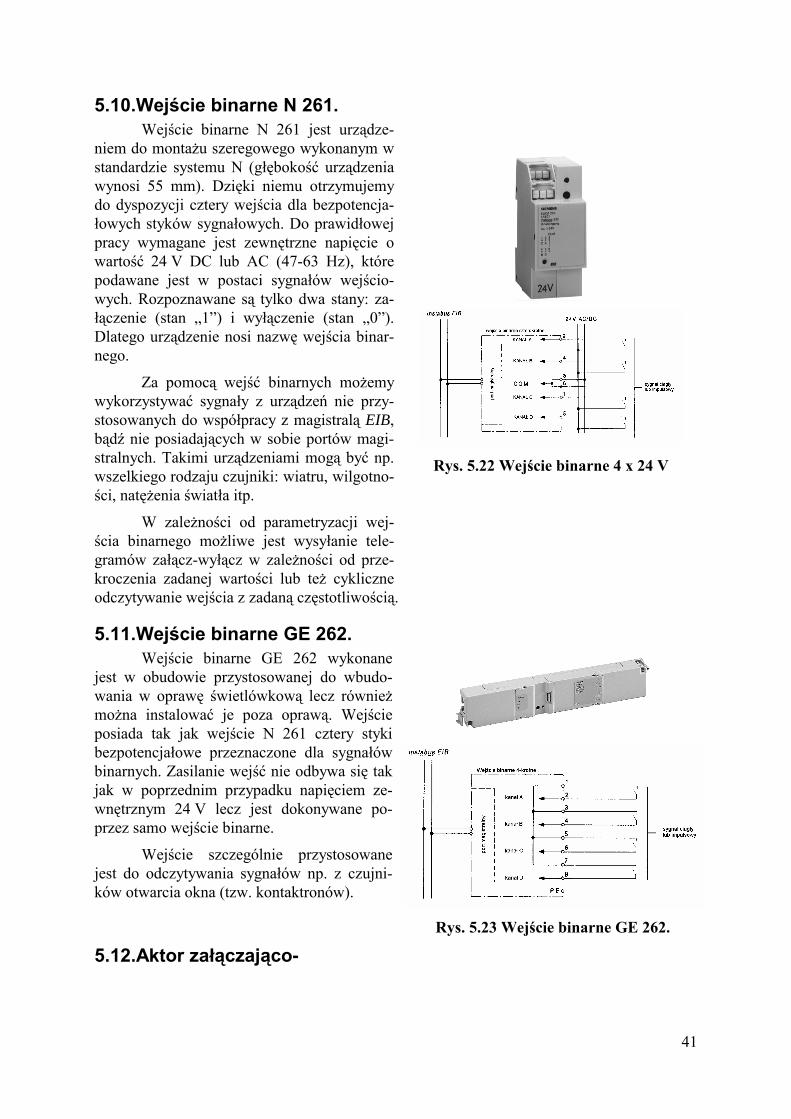
5.5. Regulator temperatury UP 252.Regulator tak jak poprzednie urządze-
nia współpracuje z podtynkowym portem ma-gistralnym. Może pracować jako regulatordwustanowy (termostat) lub ciągły (P, PI),wyłącznie w trybie ogrzewania lub chłodze-nia, bądź w trybie kombinowanym grzewczo-chłodzącym. Zawiera w sobie czujnik tempe-ratury z którego pobierana jest aktualna tem-peratura i porównywana z wartością zadaną.Różnica zostaje przeliczona na wielkość na-stawy zaworu, która z kolei zostaje przesłanaw postaci rozkazu do elementu wykonawcze-go.
Powierzchnia obsługi wyposażona jest w pięć diod do wskazywania aktualnego stanupracy, przycisk do zmiany trybu pracy pomiędzy temperaturą komfortową, oczekiwaniem anocnym obniżeniem temperatury oraz pokrętła, które pozwala na ręczną zmianę temperaturyw zakresie ± 3oC od wartości bazowej.
Regulatory UP 250 i 251 posiadają identyczne możliwości jak UP 252, są jedynie wy-konane w innym programie (mają trochę inny wygląd).
Rys. 5.16 Zintegrowany przycisk z czujni-kiem podczerwieni UP 230.
Rys. 5.17 Regulator temperatury 252.

39
5.6. Adapter UP 220Służy do przystosowania monostabilnych
przycisków konwencjonalnych (samopowrot-nych) i konwencjonalnych łączników do współ-pracy z systemem instabus. Zasadą działaniaprzypomina czterokrotne wejście binarne GE262, z tą tylko różnicą, że obudowa i wielkośćurządzenia przystosowana jest do umieszczeniaw puszce elektroinstalacyjnej pod łącznikiemklasycznym. Ze względu na to, że przyciski kon-wencjonalne posiadają zazwyczaj nie więcej jakdwa klawisze, przy pomocy adaptera UP 220można obsługiwać standardowo dwa podwójneprzyciski.
5.7. Wyjście binarne N 562.Wyjścia binarne są jednymi z kilku pod-
stawowych elementów systemu instabus EIB.Przy ich pomocy możemy w prosty sposób ste-rować dowolnym obiektem elektrycznym lubelektrycznie sterowanym. Oczywiście sterowa-nie takie ograniczone jest tylko do pracy dwu-stanowej (binarnej). Pokrótce urządzenie możnaopisać jako styki zwierne uruchamiane rozka-zami z magistrali.
Wyjście binarne N 562 jest urządzeniemwykonanym do zainstalowania na szynie35 mm i posiada dwa styki 6 A, które działająniezależnie od siebie. Wyjścia takie mogą zo-stać, wykorzystane w zależności od programuaplikacyjnego, do załączania oświetlenia, dosterowania elektrozaworami grzejnikowymi(praca dwustanowa), jak również do innychcelów.
Rys. 5.18 Adapter UP 220.
Rys. 5.19 Wyjście binarne N 562.

40
5.8. Wyjście binarne GE 562.Wyjście GE 562 zostało przystosowa-
ne do wmontowania w oprawy świetlówkowe.Jest to wyjście jednokrotne i posiada jedenstyk zwierny 6 A. Styk ten może sterować nietylko jedną oprawą lecz także całą grupąopraw. Ilość sterowanych opraw zależy odmocy czynnej i biernej pobieranej przezoprawy. Oczywiście, w przypadku sterowaniacałą grupą przez jedno wyjście, wszystkieoprawy będą załączane i wyłączane jednocze-śnie. W celu poprawnego działania, należydoprowadzić do wyjścia binarnego przewódmagistralny i przewód zasilający. Obwód za-silania oprawy zamyka się poprzez styk wyj-ścia binarnego. Chcąc sterować innymi opra-wami za pomocą tego samego wyjścia, należydoprowadzić zasilanie do tych opraw z zacisków zasilających oprawy, w której umieszczonejest wyjście binarne.
5.9. Wyjście binarne GE 563.Wyjście binarne GE 563, tak jak
GE 562, przystosowane jest do wbudowania woprawy świetlówkowe. Wymiary zewnętrzneobu urządzeń są identyczne. Wyjście GE 563jest wyjściem dwukrotnym, posiadającym dwastyki zwierne 6 A. Zazwyczaj montuje się je wmiejscu, gdzie są umieszczone blisko siebieoprawy, bądź grupy opraw, sterowane nieza-leżnie. Identycznie jak w poprzednim przy-padku konieczne jest doprowadzenie przewo-du zasilającego i przewodu magistralnego.Napięcie zasilające drugą oprawę, lub grupęopraw, należy wyprowadzić z drugiego stykuurządzenia.
Rys. 5.20 Wyjście binarne GE 562.
Rys. 5.21 Wyjście binarne GE 563.
41
5.10. Wejście binarne N 261.Wejście binarne N 261 jest urządze-
niem do montażu szeregowego wykonanym wstandardzie systemu N (głębokość urządzeniawynosi 55 mm). Dzięki niemu otrzymujemydo dyspozycji cztery wejścia dla bezpotencja-łowych styków sygnałowych. Do prawidłowejpracy wymagane jest zewnętrzne napięcie owartość 24 V DC lub AC (47-63 Hz), którepodawane jest w postaci sygnałów wejścio-wych. Rozpoznawane są tylko dwa stany: za-łączenie (stan „1”) i wyłączenie (stan „0”).Dlatego urządzenie nosi nazwę wejścia binar-nego.
Za pomocą wejść binarnych możemywykorzystywać sygnały z urządzeń nie przy-stosowanych do współpracy z magistralą EIB,bądź nie posiadających w sobie portów magi-stralnych. Takimi urządzeniami mogą być np.wszelkiego rodzaju czujniki: wiatru, wilgotno-ści, natężenia światła itp.
W zależności od parametryzacji wej-ścia binarnego możliwe jest wysyłanie tele-gramów załącz-wyłącz w zależności od prze-kroczenia zadanej wartości lub też cykliczneodczytywanie wejścia z zadaną częstotliwością.
5.11. Wejście binarne GE 262.Wejście binarne GE 262 wykonane
jest w obudowie przystosowanej do wbudo-wania w oprawę świetlówkową lecz równieżmożna instalować je poza oprawą. Wejścieposiada tak jak wejście N 261 cztery stykibezpotencjałowe przeznaczone dla sygnałówbinarnych. Zasilanie wejść nie odbywa się takjak w poprzednim przypadku napięciem ze-wnętrznym 24 V lecz jest dokonywane po-przez samo wejście binarne.
Wejście szczególnie przystosowanejest do odczytywania sygnałów np. z czujni-ków otwarcia okna (tzw. kontaktronów).
5.12. Aktor załączająco-
Rys. 5.22 Wejście binarne 4 x 24 V
Rys. 5.23 Wejście binarne GE 262.

42
ściemniający GE 526.Aktor załączająco-ściemniający jest
elementem pozwalającym na pełne sterowanieoprawą świetlówkową lub grupą opraw.Umożliwia mu to układ EVG-Dynamic, któ-rego umieszczenie w oprawie jest warunkiempełnego działania sterowania. Układ ten po-siada dwa wejścia jedno zasilające 220 V AC idrugie sterujące 0 - 10 V DC. W zależności odwartości napięcia sterującego układ EVG-Dynamic wymusza odpowiednią wartość na-tężenia światła, proporcjonalną do napięciasterującego. Układy takie są również stosowa-ne w konwencjonalnych instalacjach.
Aktor GE 526 posiada jeden stykzwierny, za pomocą którego załączane jestnapięcie zasilające EVG-Dynamic oraz zaciskisterujące, generujące napięcie stałe o wartościod 0 do 10 V. Napięcie to jest sterowane roz-kazami z systemu EIB.
5.13. Łącznik żaluzji typ 520.Łącznik 520 jest przeznaczony, jak
wszystkie inne łączniki żaluzji, do sterowaniasilnikami żaluzji, tak aby wpływać nie tylkona ich podnoszenia i opuszczanie lecz równieżna zmianę kąta nachylenia blaszek. Szczegól-ność tego urządzenia polega na wykonaniu gospecjalnie, z przeznaczeniem do umieszczeniaw listwach (kanałach) elektroinstalacyjnychfirmy Tehalit.
5.14. Napęd zaworu grzejnikowego EMO.Napęd zaworu grzejnikowego EMO
firmy Heimeier (nazywany często mylnie za-worem grzejnikowym) jest urządzeniem przy-stosowanym do montażu na standardowychzaworach grzejnikowych, których producen-tem jest też ta firmy. Zawiera on w sobie portmagistralny, który umożliwia mu komunika-cje z magistralą. Może pracować w dwóchtrybach pracy: dwustanowej (włącz-wyłącz),jak zwykły elektrozawór, oraz ciągłej, o regulowanej wartości przepływu czynnika grzewcze-go. W przypadku stosowania napędu dla zaworów innych producentów należy zastosowaćdodatkowy adapter.
Rys. 5.24 Aktor załączająco-ściemniającyGE 526.
Rys. 5.25 Łącznik żaluzji firmy Tehalit.
Rys. 5.26 Napęd zaworu grzejnikowego.

43
5.15. Moduł scenowy N 300.Moduł scenowy jest elementem służącym
do zapamiętania szeregu rozkazów w tzw. „scenie”.Nazwa pochodzi od scen oświetleniowych do któ-rych moduł jest najczęściej wykorzystywany. Przypomocy jednego przycisku jesteśmy w stanie uru-chomić jednocześnie kilka urządzeń i ustawić je wwybranej pozycji. Odbywa się to na takiej zasadzie,że przycisk przesyła telegram do modułu scenowe-go, a następnie moduł generuje swoje własne tele-gramy do odpowiednich aktorów. Moduł zapamię-tuje cztery sceny, każda uruchamia do ośmiuobiektów. Każdy z obiektów może obejmowaćurządzenia nie powiązane ze sobą. Jedynym ogra-niczeniem jest, aby obiekty komunikacyjne urzą-dzeń zebranych we wspólnym obiekcie modułuscenowego były tego samego typu (np. jednobitowe).
5.16. Urządzenia do sterowania podczerwienią.Sterowanie podczerwienią odbywa się za
pomocą ręcznego lub naściennego nadajnika pod-czerwieni. Sygnał podczerwieni z takiego nadajnikajest odbierany przez odbiornik S 440, który umiesz-cza się zazwyczaj w suficie podwieszanym, i prze-syłany do dekodera N 450, umieszczonego w roz-dzielnicy, na szynie 35 mm (euroszynie).
Ręczny nadajnik udostępnia nam osiemosobnych kanałów, zaś nadajnik naścienny, w za-leżności od wykonania, od jednego do czterech ka-nałów. Nadajniki naścienne mogą być zastosowanejako łączniki w miejscach, w których ułożenieprzewodów jest trudne lub niemożliwe.
Dekoder zapewnia przekształcenie sygnałówzakodowanych w podczerwieni na telegramy zgod-ne z protokołem magistralnym. Można do niegopodłączyć maksymalnie cztery odbiorniki S 440.Jednakże podłączenie powyżej dwóch odbiornikówwymaga zastosowania oddzielnego, dodatkowegozasilacza, ze względu na wyższy pobór prądu.
Rys. 5.27 Moduł scenowy N 300.
Rys. 5.28 Dekoder N 450 i odbiornikpodczerwieni S 440.

44
5.17. Łącze szeregowe N 148.Jest to element służący do komunikacji po-
między komputerem a magistralą. Składa się z łączaszeregowego RS 232 połączonego z portem magi-stralnym, w obudowie przystosowanej do montażuna szynę 35mm (tzw. euroszynę). Zapewnia onprzekształcenie sygnałów z protokołu komunikacyj-nego RS 232 na telegramy zgodne ze standardemEIB. Łącze takie jest potrzebne do uruchomieniainstalacji oraz do późniejszego serwisowania iewentualnych napraw. Można je również wykorzy-stać do stałego nadzoru instalacji przez komputer,do tzw. wizualizacji.
5.18. Zasilacz N 122.Każda linia magistralna wymaga obecności
przynajmniej jednego zasilacza. Zasilacz taki za-pewnia odpowiednie napięcie dla obwodu sygnało-wego systemu EIB. Posiada ograniczenie napięcio-we i prądowe, które zabezpieczają go przed zwar-ciami. Jest również odporny na krótkie zaniki na-pięcia zasilającego (czas podtrzymania 200 ms).Zasilacz N 122 wyposażony jest w zintegrowaną znim cewkę, która zapobiega powstawaniu zwarćtelegramów na magistrali.
5.19. Sprzęgło liniowo-obszarowe N 140.Sprzęgło liniowe łączy sygnałowo dwie od-
dzielne linie magistralne, jednocześnie zapewniającseparację galwaniczną pomiędzy tymi liniami.Dzięki temu każda linia, w przypadku transmisjilokalnej, może pracować niezależnie od innych. Wmomencie uruchamiania instalacji w sprzęgle zapi-sywana jest tabela filtracji, która pozwala na okre-ślenie, które telegramy mają być przesłane przezsprzęgło, a które mają być wytłumione. Sprzęgłoobszarowe pełni takie same zadanie, łącząc ze sobąobszary. Sprzęgło N 140 pełni rolę zarówno sprzę-gła liniowego jak i sprzęgła obszarowego. Różnicapolega jedynie na odpowiednim sparametryzowaniuza pomocą ETS.
Rys. 5.29 Łącze szeregowe RS 232.
Rys. 5.30 Zasilacz N 122.
Rys. 5.31 Sprzęgło N 140

45
6. Wprowadzenie do programu ETS.Aby uruchomić instalację instabus, nie wystarczy połączyć elektrycznie wszystkie
elementy. Należy jeszcze wykonać projekt sterowania oraz przeprowadzić proces uruchomie-nia instalacji, tzn. wgrać odpowiednie aplikacje, wcześniej zaprogramowane na etapie pro-jektowania, do pamięci konkretnych urządzeń. Służy do tego program narzędziowy ETS2(European Installation Bus Tool Software), który jest standardowym programem do projekto-wania, uruchamiania i serwisowania instalacji systemu EIB, rozprowadzany przez organizacjęEIBA z siedzibą w Brukseli.
Program ETS jest przeznaczony do pracy w środowisku Windows, standardowo wdwóch wersjach językowych - niemieckiej i angielskiej (częściowo również w wersji francu-
skiej). Instaluje się go i uruchamia w sposób identyczny jak inne programy pracujące w tymśrodowisku. Minimalne wymagania sprzętowe to: komputer PC z procesorem 486, 8 MBRAM, 40 MB pamięci dyskowej, monitor kolorowy 14’’, myszka.
ETS jest programem modułowym, składającym się z kilku części wspólnie ze sobąwspółpracujących. Po uruchomieniu, otwiera się okno główne z przyciskami, za pomocą któ-rych przechodzi się do następnych części programu. Poszczególne przyciski uruchamiają po-cząwszy od lewej strony następujące moduły: nastawy całego programu, projektowanie, uru-chamianie i testowanie instalacji, zarządzanie projektami, zarządzanie bankami danych, kon-wersja projektów oraz przycisk wyjścia z programu.
Rys. 6.1 Okno główne programu ETS2 v1.1

46
6.1. Nastawy programu.Okno, które się otwiera po naciśnięciu pierwszego klawisza z lewej, daje nam możli-
wości zmiany parametrów programu i dostosowania go sobie do własnych wymagań i przy-zwyczajeń. Poszczególne opcje odnoszą się albo do konkretnych modułów programu (jak np.ustawienie projektowania bez automatycznego wprowadzania adresów fizycznych) albo rza-dziej do całości programu (np. zabezpieczenie hasłem projektu).
6.2. Zarządzanie projektami.Ponieważ projekty są integralną częścią programu, zarządzanie nimi znajduje się we-
Rys. 6.2 Okno ustawień programu ETS
Rys. 6.3 Okno zarządzania projektami programu ETS.

47
wnątrz programu. Można je wczytywać (importować), zapisywać (eksportować), czy też do-konywać dzielenia i łączenia ze sobą projektów. Dzięki takiemu rozwiązaniu projekty zapi-sywane poza ETS są w formie spakowanej i zajmują niewiele miejsca.
6.3. Zarządzanie bankiem danych.Wszyscy producenci urządzeń przystosowanych do instalacji w systemie EIB są jedno-
cześnie dostarczycielem programów aplikacyjnych do tych urządzeń. Programy te zawarte sąw odpowiednio zaprojektowanej i przystosowanej do programu ETS bazie danych urządzeńproducenta (np. Siemens). Ponieważ projekt od początku wykonuje się na podstawie konkret-nych urządzeń, dlatego musimy posiadać taką bazę (jest ona udostępniana bezpłatnie). Bazama postać pliku o formacie VDX, który należy wczytać do programu. Zasady zarządzaniabazami danych są identyczne jak w przypadku projektów.
6.4. Konwersja.Moduł ten umożliwia konwersje projektów wykonanych za pomocą poprzednich wer-
sji programu ETS.
6.5. Uruchamianie i testowanie.Ta część programu umożliwia nam uruchomienie, testowanie i serwisowanie instala-
cji. Do poprawnego działania tego modułu konieczne jest połączenie komputera, z któregochcemy ingerować w instalację, z daną instalacją. Dokonuje się tego poprzez port szeregowyw komputerze i łącze RS232 z portem magistralnym włączonym do magistrali.
Uruchomienie instalacji sprowadza się do dwóch czynności: określenie adresów fi-zycznych poszczególnych urządzeń oraz zaprogramowania funkcji tych urządzeń zgodnie zprojektem. Pierwsza z tych czynności jest bardziej pracochłonna, gdyż wymaga ręcznego
Rys. 6.4 Moduł do zarządzania bazami danych urządzeń.

48
określenia urządzenia, któremu w danym momencie nadajemy adres fizyczny. Sprowadza sięto do naciśnięcia w odpowiednim momencie mikroprzełącznika znajdującego się w każdymporcie magistralnym. Druga z tych czynności polega na zapisaniu w pamięci portu parame-trów i funkcji danego urządzenia. Odbywa się ona w sposób automatyczny. Wymagany jestjedynie projekt wykonany w module Projektowanie. Oczywiście obie te czynności mogą od-bywać się jednocześnie.
Ponadto w tym module istnieje możliwość odsłuchiwania telegramów wysyłanych pomagistrali, odnajdywanie urządzeń po określeniu adresu fizycznego, odczytywanie parame-trów i funkcji urządzeń i kilka innych opcji potrzebnych do napraw instalacji.
6.6. Projektowanie.Po otwarciu się okna „Projektowanie” uzyskujemy widok „budowlany” całego pro-
jektu. Jest to schematyczny odpowiednik planów budowlanych. Dzięki temu nie jesteśmy zo-bligowani do korzystania z planów budowlanych i żmudnego nanoszenia na te plany urządzeń(jak to było w poprzednich wersjach ETS). Pasek narzędzi umożliwia umieszczanie w projek-cie budynków, części budynków, pomieszczeń, rozdzielnic (pomieszczeń specjalnych) orazurządzeń. Zasada projektowania jest dość prosta i polega na przeciąganiu poszczególnychikon - „obiektów budowlanych” do odpowiednich miejsc w projekcie, z logicznym zastrzeże-niem, że nie można wstawiać obiektu nadrzędnego do obiektu podrzędnego (np. budynku dopokoju). W drugą stronę nie jest wymagana hierarchizacja elementów tzn. w budynku nie mu-szą się znajdować pokoje w których dopiero występują urządzenia. Można pominąć pokoje,co jednak nie jest zalecane ze względu na małą przejrzystość projektów, szczególnie dużych.Elementami, które koniecznie powinny znajdować się w projekcie, są urządzenia. W momen-cie umieszczania nowego urządzenia w projekcie otwiera się okno wyboru, za pomocą które-go określamy konkretne urządzenie i jego aplikację (dostępne są tylko urządzenia, które
Rys. 6.5 Okno uruchamiania i testowania instalacji systemu instabus.

49
wprowadziliśmy za pomocą modułu do zarządzania bankami danych). W ten sposób możemyumieścić w odpowiednich pomieszczeniach potrzebne nam urządzenia do realizacji zadanychfunkcji. Standardowo ETS po umieszczeniu urządzenia w projekcie nadaje mu kolejny adresfizyczny. Należy jednak pamiętać, że adres fizyczny określa konkretne miejsce w topologiisystemu, i ze względu na ograniczenia techniczne systemu urządzenia posiadające bliski adresfizyczny (znajdujące się np. w tej samej linii) nie mogą być od siebie zbyt oddalone. Opcję tęmożna jednak wyłączyć i później przyporządkować urządzeniom ich adresy fizyczne.
Zaprojektowanie rozmieszczenia urządzeń w poszczególnych pomieszczeniach nieokreśla jeszcze funkcji jakie te urządzenia powinny spełniać. W tym celu należy zapisaćwspólne adresy grupowe urządzeń nadających polecenia (sensorów) i urządzeń odbierającychje (aktorów). Strukturę takich adresów pokazuje rys. 5.7. Jest możliwe projektowanie przypomocy trójpoziomowej struktury (grupa główna (16), pośrednia (8), podgrupa (256)) lubstruktury dwupoziomowej (grupa główna (16), podgrupa (2048)). Wartości w nawiasach sąliczbą obiektów wynikającą z szesnastobitowego adresu docelowego w telegramie (patrzrozdz. 3.3 „Budowa i mechanizm przesyłu telegramu”).
W przykładowym projekcie wybrano strukturę trójpoziomową gwarantującą lepsząprzejrzystość. Jako grupy główne zdefiniowano: grupę „centralne wyłączanie” oraz grupę„Biuro ASI” (część budynku). Grupy pośrednie opisują poszczególne obszary systemu, tzn.:oświetlenie, żaluzje, ogrzewanie, zabezpieczenie budynku oraz sterowanie scenami, zaś pod-grupy, konkretne funkcje realizowane przez system (np. załączenie opraw L1, L2 i L3 na ko-rytarzu).
Każde urządzenie użytkowe wprowadzone do projektu posiada obiekty komunikacyj-ne, które należy powiązać z obiektami innych urządzeń. Obiekty te są widoczne na schemacie„budowlanym”, po włączeniu klucza znajdującego się w prawym górnym rogu. Na przykład
Rys. 6.6 Widok "budowlany" w module projektowym programu ETS.

50
jeśli chcemy włączać i wyłączać oprawę oświetleniową za pomocą łącznika, musimy obiekty„załączanie” łącznika i oprawy umieścić we wspólnej podgrupie.
Należy zwrócić uwagę na to, że istnieją obiekty o różnych typach (jednobitowe, dwu-bitowe, czterobitowe i jednobajtowe). Program pozwala łączyć we wspólnej grupie tylkoobiekty o takim samym typie. Ważna w takim przypadku jest parametryzacja urządzenia. Wszczególności dotyczy to przycisków, których obiekty w dużym stopniu możemy dopasowy-wać. W przypadku, gdy chcemy obsługiwać za pomocą jednego przycisku większą ilość urzą-dzeń odbiorczych należy odpowiednie obiekty wszystkich urządzeń zgrupować pod jednymadresem grupowym. Istnieje również możliwość obsługi jednego urządzenia przez kilka przy-
Rys. 6.7 Struktura adresów grupowych.
Rys. 6.8 Połączenie obiektów komunikacyjnych sensora i aktora.

51
cisków. Obiekt komunikacyjny tego urządzenia musi być wtedy połączony z obiektami przy-cisków ale w oddzielnych grupach. Obiekt taki posiada wtedy kilka adresów grupowych.
Po zakończeniu procesu wzajemnego przyporządkowania obiektów komunikacyjnychurządzeń można określić, o ile wybrano wcześniej opcję projektowania bez adresów fizycz-nych, topologię systemu (adresy fizyczne). Wykonuje się to ręcznie poprzez wpisanie adresulub półautomatycznie za pomocą okna do projektowania topologii. Na pasku narzędziowym
Rys. 6.9 Obiekty komunikacyjne urządzeń.
Rys. 6.10 Widok topologii projektu.

52
tego okna dostępne są nam obszary, linie oraz urządzenia. Przeciągając urządzenia z okna„budowlanego” do odpowiedniej linii w oknie topologii automatycznie nadawany jest adresfizyczny, odpowiedni do miejsca w topologii. W ten sposób urządzenia z pobliskich pomiesz-czeń możemy umieszczać w tej samej linii.
Projekt należy uzupełnić jeszcze o urządzenia podstawowe i systemowe (zasilacze,sprzęgła liniowe i obszarowe, łącze RS) i sprawdzić poprawność za pomocą funkcji progra-mu.
Gotowy projekt systemu można uruchamiać za pomocą modułu Uruchomienie/Test.

53
7. Uwagi końcowe.Standard EIB ma wymiar ponadnarodowy, czego dowodem jest istnienie zrzeszenie
producentów urządzeń do systemu - EIBA (European Installation Bus Association). Organiza-cja ta zrzesza wielu znanych producentów osprzętu elektroinstalacyjnego m.in. Siemens AG.Do EIBA należą również firmy z innych branży, takich jak grzejnictwo, gospodarstwo domo-we, telekomunikacja, które produkują inne urządzenia przystosowane do współpracy z magi-stralą. Stowarzyszeni producenci zachowują wspólnie wynikające ze standardu zasady, czu-wając nad tym poprzez system certyfikacji wyrobów. Z ujednolicenia i surowości wymagańwynika także dodatkowa korzyść. Znak nadawany certyfikowanym wyrobom uznawany jestjako znak najwyższej jakości.
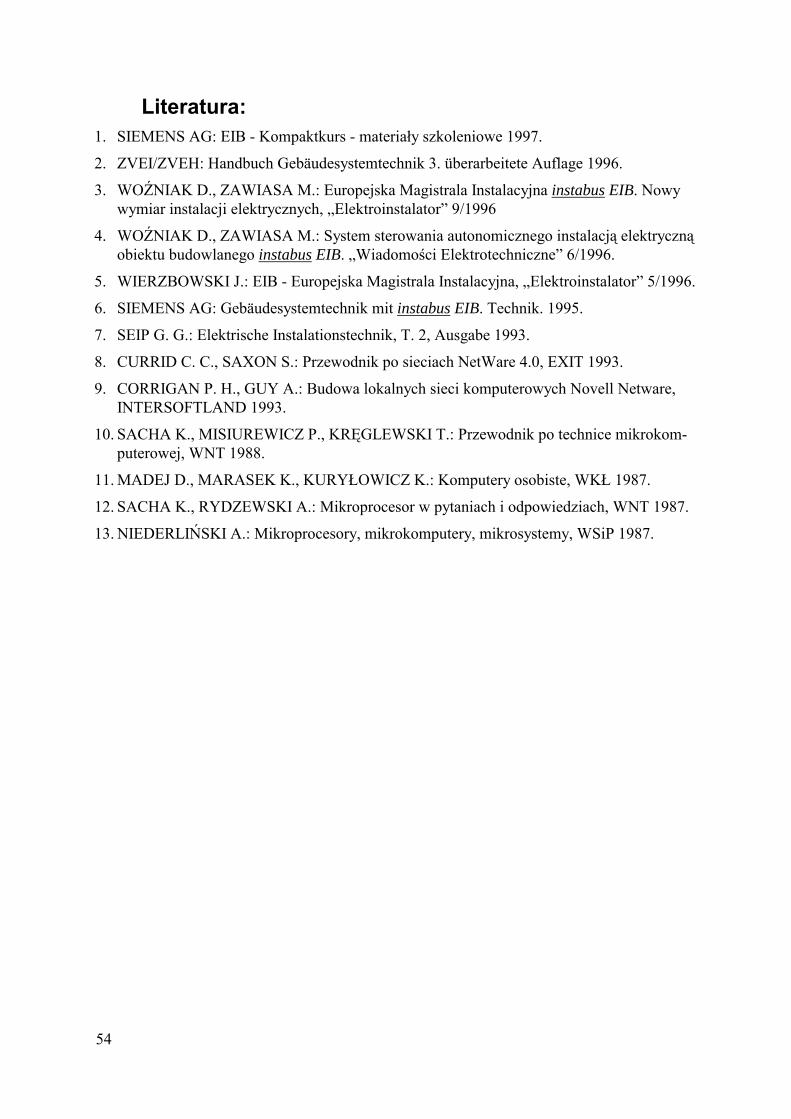
54
Literatura:1. SIEMENS AG: EIB - Kompaktkurs - materiały szkoleniowe 1997.
2. ZVEI/ZVEH: Handbuch Gebäudesystemtechnik 3. überarbeitete Auflage 1996.
3. WOŹNIAK D., ZAWIASA M.: Europejska Magistrala Instalacyjna instabus EIB. Nowywymiar instalacji elektrycznych, „Elektroinstalator” 9/1996
4. WOŹNIAK D., ZAWIASA M.: System sterowania autonomicznego instalacją elektrycznąobiektu budowlanego instabus EIB. „Wiadomości Elektrotechniczne” 6/1996.
5. WIERZBOWSKI J.: EIB - Europejska Magistrala Instalacyjna, „Elektroinstalator” 5/1996.
6. SIEMENS AG: Gebäudesystemtechnik mit instabus EIB. Technik. 1995.
7. SEIP G. G.: Elektrische Instalationstechnik, T. 2, Ausgabe 1993.
8. CURRID C. C., SAXON S.: Przewodnik po sieciach NetWare 4.0, EXIT 1993.
9. CORRIGAN P. H., GUY A.: Budowa lokalnych sieci komputerowych Novell Netware,INTERSOFTLAND 1993.
10. SACHA K., MISIUREWICZ P., KRĘGLEWSKI T.: Przewodnik po technice mikrokom-puterowej, WNT 1988.
11. MADEJ D., MARASEK K., KURYŁOWICZ K.: Komputery osobiste, WKŁ 1987.
12. SACHA K., RYDZEWSKI A.: Mikroprocesor w pytaniach i odpowiedziach, WNT 1987.
13. NIEDERLIŃSKI A.: Mikroprocesory, mikrokomputery, mikrosystemy, WSiP 1987.

Siemens Sp. z o.o.Biuro Automation & DrivesDział A&D ETul. Żupnicza 1103-821 Warszawa
tel. 022 870 98 13870 98 12870 91 16
fax 022 870 90 28e-mail: [email protected]