team peregrine chemical agent detection from small unmanned aerial system using hyperspectral sensor...
TRANSCRIPT

TEAM PEREGRINE
Chemical Agent Detection from Small Unmanned Aerial System Using
Hyperspectral Sensorat the
Office of the Secretary of DefenseRapid Reaction Technology Office (RRTO)
THUNDERSTORM 15-323-25 February 2015
Camp Shelby, MS

Objectives
THUNDERSTORM 15-3 Focus Area: Explore emerging technologies for their technical applications and their potential to use a battery-powered Vertical Take-Off and Land (VTOL) Unmanned Aerial System (UAS) to support the detection and identification of chemical and/or biological Weapons of Mass Destruction (WMD).
TEAM PEREGRINE: •Integrate sUAS and Nano-Hyperspec® Hyperspectral (HSI) Sensor•Adapt sUAS Flight Characteristics to Accommodate HSI Data
Collection•Demonstrate Chemical Agents Detection Through Hyperspectral Data
Analysis
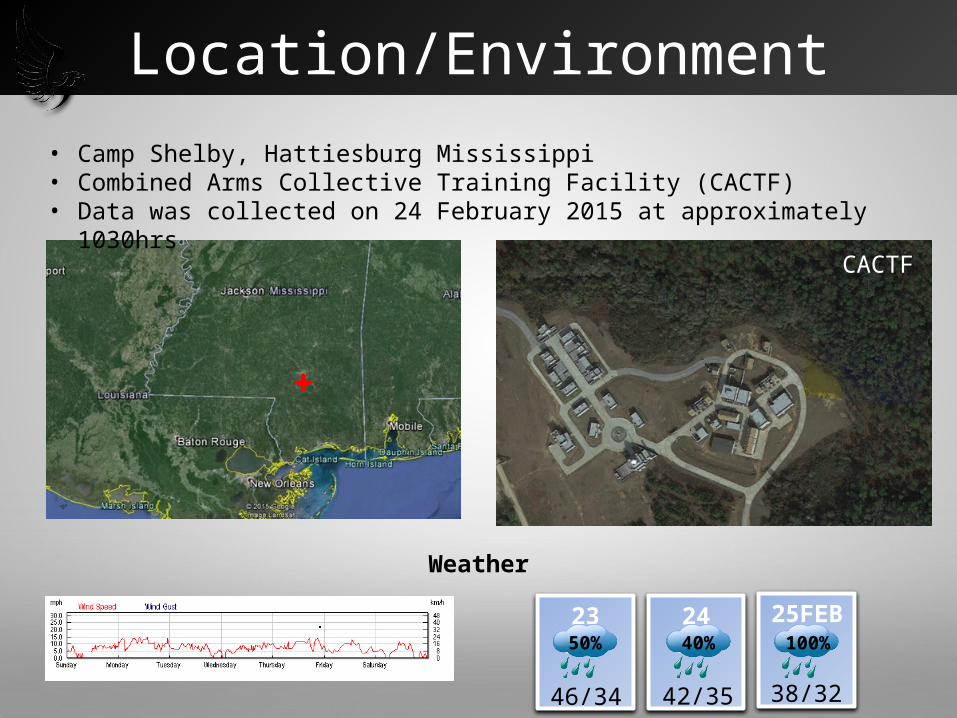
• Camp Shelby, Hattiesburg Mississippi • Combined Arms Collective Training Facility (CACTF)• Data was collected on 24 February 2015 at approximately 1030hrs
Location/Environment
23 FEB50%
46/34
24 FEB 25FEB40% 100%
38/3242/35
Weather
CACTF

Simulant Chemical Target Material Methyl Salicylate (MES)
Target Environment
• Urban environment of various building materials, structures and sizes.
• Dispersal Method: Placed on black plastic, clear plastic, soil and concrete
Target Characteristics
• Standard US Army Chemical Simulant• Complex organic ester naturally produced by
many species of plants, particularly wintergreens
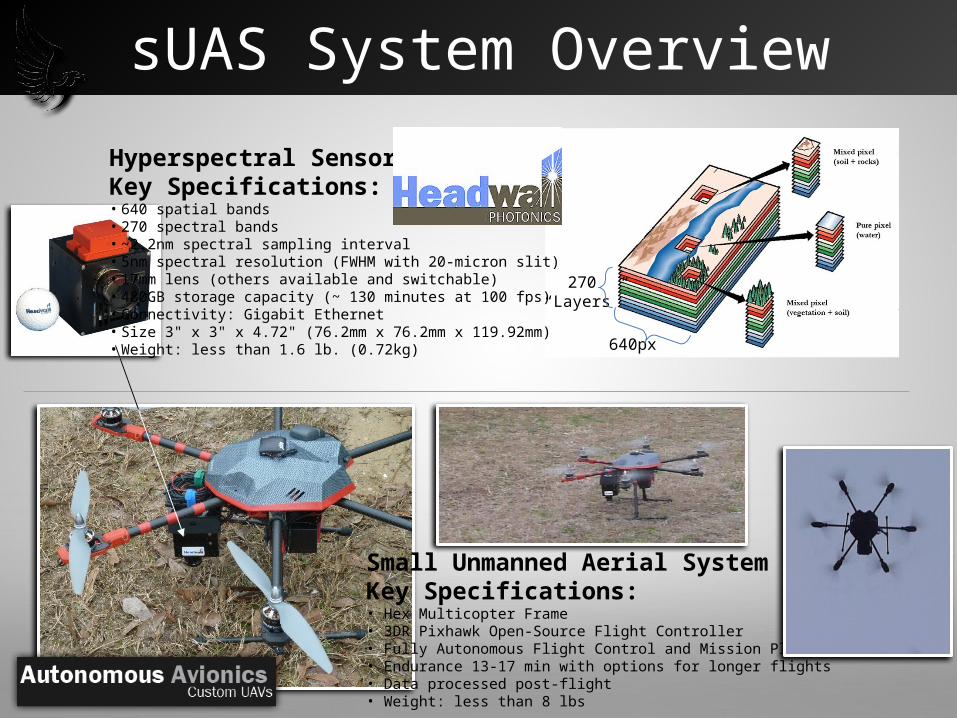
sUAS System Overview
Hyperspectral SensorKey Specifications:• 640 spatial bands• 270 spectral bands• ~2.2nm spectral sampling interval• 5nm spectral resolution (FWHM with 20-micron slit)• 17mm lens (others available and switchable)• 480GB storage capacity (~ 130 minutes at 100 fps)• Connectivity: Gigabit Ethernet• Size 3" x 3" x 4.72" (76.2mm x 76.2mm x 119.92mm)• Weight: less than 1.6 lb. (0.72kg)
Small Unmanned Aerial SystemKey Specifications:• Hex Multicopter Frame• 3DR Pixhawk Open-Source Flight Controller• Fully Autonomous Flight Control and Mission Planning• Endurance 13-17 min with options for longer flights• Data processed post-flight• Weight: less than 8 lbs
640px
270“Layers”

Planned Mission
Flown Mission
Mission Planning
Autonomous Route• 5-meter/second Speed• 300 Feet Altitude• Flight Duration 7 Minutes
MES Target Information
Provided• Located within Polygon• Dispersed on and near structures
Flight PatternTarget Boundary
Mission As Flown• Nadir coverage from sensor• Computer controlled
(Autonomous) flight

Target Detection / Identification
Detection 2Detection 1
Detection 3
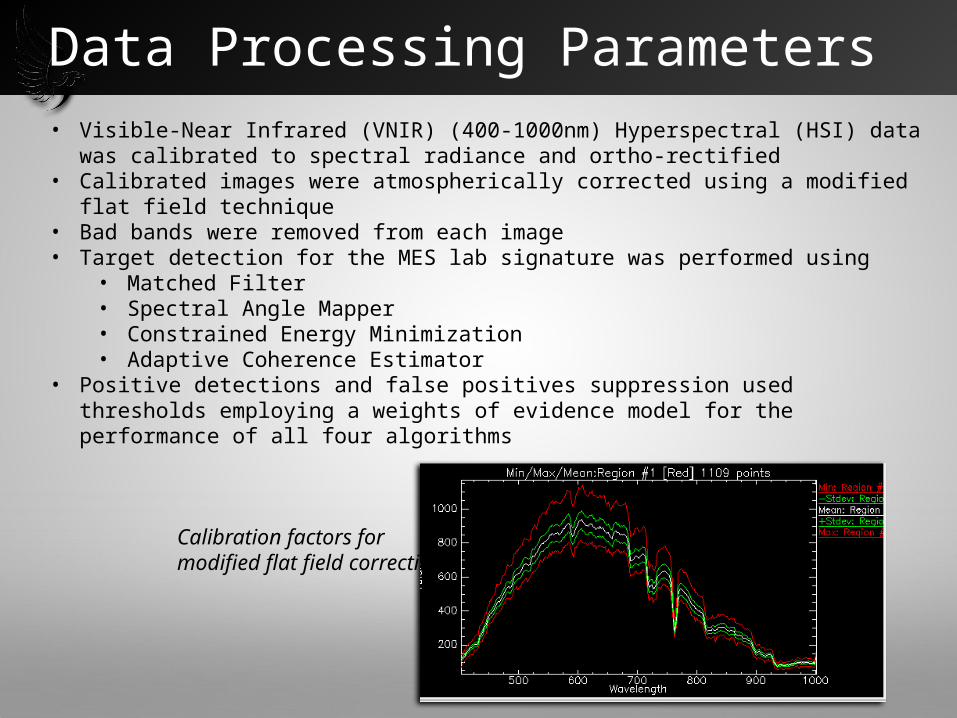
Data Processing Parameters • Visible-Near Infrared (VNIR) (400-1000nm) Hyperspectral (HSI) data was
calibrated to spectral radiance and ortho-rectified• Calibrated images were atmospherically corrected using a modified flat field
technique• Bad bands were removed from each image• Target detection for the MES lab signature was performed using
• Matched Filter• Spectral Angle Mapper• Constrained Energy Minimization• Adaptive Coherence Estimator
• Positive detections and false positives suppression used thresholds employing a weights of evidence model for the performance of all four algorithms
Calibration factors for modified flat field correction

• Lab spectrum for MES plotted in RED vs detected spectral signatures for MES in-scene
• Detection 1 depicts a much higher concentration of the MES chemical than Detection 2
• Detection 3 depicts a higher concentration than Detection 2 but lower than Detection 1
Detection 2Detection 1
Detection 3
Spectral Identification

Accomplishments
• sUAS Frame-Mounted Hyperspectral Sensor Collects Push Broom Imagery that enables Detailed Analytics of the Data Cube, such as target detection and identification
• Data Cube Analytics Enable Positive Identification of Target Simulant Material (Methyl salicylate)
• No “False Positive” Detections Within the Data Cube
• Identify Areas for Improvements in Optimal System sUAS, Sensor, Data Analytic Software Integration Real-Time Analysis and Reporting for Collected Data Autonomous Flight Control
• Able to Collect Actionable Data Despite Overcast Skies